
監視方法および監視システム
【課題】
測長SEMは、高真空に保たれた試料室にウェーハを搬入して半導体デバイスの線幅や穴径を測長する装置であり、測長SEMを使用して、真空中の装置状態を容易に把握する。他の真空装置についても適用できるようにする。
【解決手段】
真空中の駆動系の状態、真空バルブ、真空状態や電子光学系の状態を画面化したことにより真空中の装置状態の把握を可能とした。また、各種センサのON/OFFタイミング、Open/Closeタイミングおよび真空の状態をタイミングチャート化し時間計測や、リファレンスデータとの比較を可能とした。
この機能を有することにより、装置保守点検や装置修理時に的確な判断を行う
。
測長SEMは、高真空に保たれた試料室にウェーハを搬入して半導体デバイスの線幅や穴径を測長する装置であり、測長SEMを使用して、真空中の装置状態を容易に把握する。他の真空装置についても適用できるようにする。
【解決手段】
真空中の駆動系の状態、真空バルブ、真空状態や電子光学系の状態を画面化したことにより真空中の装置状態の把握を可能とした。また、各種センサのON/OFFタイミング、Open/Closeタイミングおよび真空の状態をタイミングチャート化し時間計測や、リファレンスデータとの比較を可能とした。
この機能を有することにより、装置保守点検や装置修理時に的確な判断を行う
。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測長SEM(走査顕微鏡)あるいは真空処理装置を備えた半導体製造装置などの真空部を備えた真空系装置(以下、真空装置という)の監視方法および監視システムに関する。
【背景技術】
【0002】
従来、真空装置内の状態を把握するために専用の測定装置あるいは専用の真空計などを装置に接続して必要とされた都度真空内部の状態の監視を行っていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の装置でリアルタイムに装置の状態を監視するためには、各種センサ類に計測装置を接続した状態を計測し、計測結果のデータを解析することを要した。真空装置内には、数多くのセンサ類が設けられるのが普通であり、センサの状態を同時に計測することには困難があるため同時刻における真空装置各部の状況把握は行われず、1つ1つの解析に留まっていた。特に半導体基板の製造に使用される測長SEMには自動化のために非常に多くのセンサが装置の真空室(部)内に存在する。半導体製造装置にあっても同じである。このような真空装置において全てのセンサの状態をリアルタイムに一元的に監視することは困難であった。リアルタイムに一元的に監視しない場合には、装置の保守管理あるいは不具合対策を行うときに多大の負担を避けられないでいた。
【0004】
本発明は、かかる点に鑑み、真空装置の各種センサからのデータに基づいて同一時刻についてリアルタイムで監視すると同等の監視方法を提供して、装置の保守管理あるいは不具合対策を簡便かつ一元的に行うことのできる監視装置および方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の実施態様によれば、真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援の方法であって、計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、前記計測装置の保守・診断を支援するものである。
【発明の効果】
【0006】
計測手段である加速電子線は、真空中で発生させなければならないために、従来その保守管理や診断修理をするためには、大気を装置内に入れて開放しなければならず、これが保守診断を難しくしていた。装置内の電子光学系,真空排気系,試料駆動系の機能性能に関する複数の位置と動き、真空度とガス成分,時間と速度,画像情報などをセンシングすることにより、初期状態や正常動作状態との比較をオンラインで同一時刻についてリアルタイムにできるので、保守作業,不具合原因究明から対策修理までが最適に即時に対応できるようになる。
【発明を実施するための最良の形態】
【0007】
以下、本発明にかかる実施例を図面に基づいて説明する。
【0008】
真空装置の内、以下、測長SEMを例にとって説明するが、本発明は真空部を有する真空装置に適用可能である。
【0009】
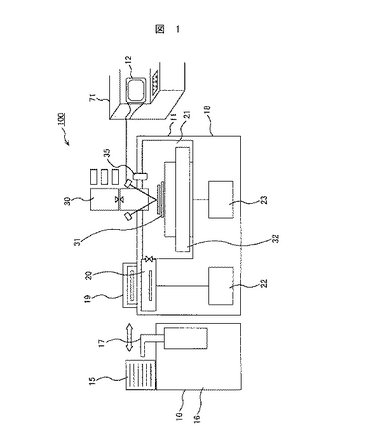
図1は、本発明の実施例である測長SEMによる測長システムの構成を示し、図2は、測長SEMの機能である電子光学系構成を示す。これらの図において、測長システム100は、大気搬送部10を有する大気搬送系、試料搬送および測長部11を有する真空系、画像部12を有する表示観察・操作系からなる。
【0010】
大気搬送部10は、複数の試料である基板を収納,保持するカセット(すなわちフープ)15,カセット台16,カセット15内に延びて基板の搬入出を行う腕を有する搬送装置17からなる。搬送装置17は搬送のためのロボットから構成され、真空中あるいは制御された大気中に配置される。ロボットはX軸,Y軸およびZ軸方向に移動する移動部を有し、水平方向に回転可能である。前述した腕はロードロック室19まで延在することができる。
【0011】
試料搬送および測長部11は、搬送本体18、前述したロードロック室(ダブルロードロック室としてもよい)19、搬送室20および測定室21(試料室)からなる。
【0012】
搬送室20、測定室21にはそれぞれ真空形成装置22,23が接続してあり、搬送室20、測定室21を真空あるいは制御された大気圧に制御することが行われる。真空形成装置22,23は、排気系を形成する真空形成制御装置(図示せず)によって制御される。
【0013】
測定室21には、図示したように、電子光学鏡体30が配置される。電子光学鏡体30の下方には、試料台31および試料台固定および制御のための試料ステージ32が設けられる。
【0014】
また、測定室21には、図示したように、電子光学鏡体30に並行して光学顕微鏡付きCCDカメラ35が配置される。
【0015】
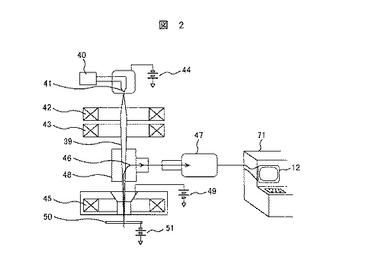
図2において、測長システム100を構成する電子光学鏡体30は、周知のように、電子光学系(鏡筒部),試料室,排気系,表示観察・操作系からなる。電子光学系は、加速電子を発生する電子銃を構成するフィラメント電源40とフィラメント41,加速電子の束39(一次電子線)を絞り込んで細束化するレンズ系,試料から発生する二次電子などを検出する検出器47(SE/BSE)から構成される。電子銃は、あるエネルギーを持った加速電子を発生させる源となる部分であり、コンデンサーレンズ43(集束レンズ)は、引出電極および陽極によって構成され、陰極には加速電圧源44によって加速電圧が印加される。レンズ系には集束レンズ,対物レンズ,対物レンズ絞り,走査コイル,非点補正装置42などが装着されている。図において、45は対物レンズを示し、48はEXBフィルタを示す。対物レンズ45には電圧を印加するためのブースタ電圧源49が設けられる。検出器47は、二次電子と反射電子46を検出するための装置であり、二次電子はエネルギーが低いのでコレクタにより捕獲され、シンチレータにより光電子に変換されて光電子増倍管で信号増幅される。反射電子の検出にはシンチレータあるいは半導体型が用いられる。
【0016】
試料室である測定室には試料台が置かれ、この上に、ウェーハなどの基材50(試料)が載置され、試料ステージ,試料導入装置,X線検出用分光器などが取り付けられる。基板50には電圧を印加するためのリーターディング電圧源51が設けられる。試料ステージは、X,Y,Z移動,回転,傾斜機能を持つ。真空系の排気装置にはロータリポンプ,油拡散ポンブなどが使用される。
【0017】
表示観察,操作系は、二次電子像,反射電子像,X線像などを画像部12に表示する。像表示・観察しながら照射電流の調整・焦点合せなどを行う。二次電子像などの出力であるアナログ信号はデジタル信号に変換され画像部12に表示され、各種解析(測定)に使用される。またこの画像は、後述するように通信回線である通信網を介して遠隔地にある監視装置に画像信号を送信することができる。また、表示観察・操作系には、試料搬送および測長部11内の真空度監視のためのタイムチャートあるいは各部の操作状況を画像として表示する。この画像信号は、通信回線を介して遠隔地にある監視装置に送信され、真空装置の各部の状況が遠隔監定されて保守管理,不具合調整に使用される。
【0018】
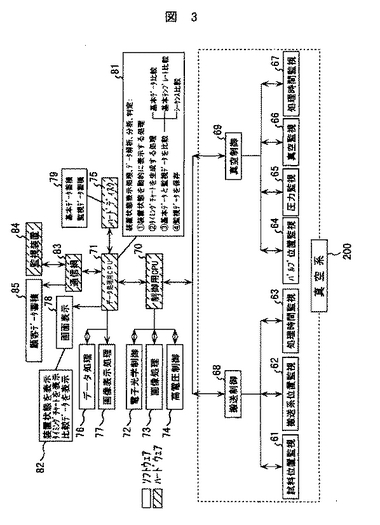
図3は、本発明の実施例をブロック図で示す。
図において、真空系200は、A群としての試料位置監視61,搬送系位置監視62および処理時間監視63が、そしてB群としてのバルブ位置監視64,圧力監視65,真空監視66および処理時間監視67がなされ、A群によって監視されて得られたデータに基づいて搬送制御68が、そしてB群によって監視されて得られたデータに基づいて真空制御69がなされる。これらの制御のために制御用CPU70が使用される。
【0019】
制御用CPU70は、データ処理用CPU71に接続されており、更に電子光学制御72,画像処理73,高電圧制御74を行うことができる。
【0020】
データ処理用CPU71は、ハードディスク75に接続されており、データ処理76および画像表示処理77を行うことができる。すなわち、画像表示処理をして画像表示装置である画像部12に画面表示78を行うための画像表示処理装置としての機能を有する。
【0021】
ハードディスク75には、基本データとしての基本監視データおよび監視データとしての運転履歴データ(リファレンスデータ)が蓄積(基本データ蓄積,監視データ蓄積79)がなされる。
【0022】
データ処理用CPU71は、装置表示処理装置,データ解析,分析,判定81を行う機能を有する。これらの機能は、図に示すように、

を有する。
【0023】
タイミングチャートを生成し表示する処理機能は、画面表示装置の画面に、装置構成、特に真空系各部の基本運転監視データと運転履歴データとを同時進行のタイムチャートとして比較して表示することができる。この場合に、蓄積された基本監視データと運転履歴データとが使用され、並列する形で表示される。
【0024】
これらの結果は、画面表示78として、装置状態表示,タイミングチャート表示,比較データとしての表示82がなされる。
【0025】
以上のように、真空系について、各部を監視する監視センサから運転状況が逐時報告されて運転履歴データとして蓄積され、装置状態監視要求がなされると、蓄積された基本監視データと共に運転履歴データが同時進行の形で並列表示され、両者のデータ間の乖離状況がタイミングチャートで色表示によって区別されて表示される。また、各部の構成部分が装置状態の動きをして連動して表示される。
【0026】
データ処理用CPU71上の画像部12の画面に、表示82で示すように表示された装置状態,タイミングチャート,比較データから真空系の保守管理あるいは不具合調整のための分析,判定を監視する人間、あるいはサービスマンが行うことができるが、更にデータ処理用CPU71の機能を生かして自動的にデータ解析を行い、分析,判定を行って自動表示するようにしてもよい。
【0027】
他の手法としては、データ処理用CPU71の機能を簡便化して通信機能を有するものとし、画面表示78される内容を通信網83を介して監視装置84に表示するようにすることもできる。この場合、ハードディスク75の基本データ蓄積,監視データ蓄積79機能は、顧客データ蓄積85として監視装置84に蓄積される。また、監視装置84は、画面表示78としての機能を有し、表示82に示す各種の表示を行うことになる。
【0028】
この手法にあっては、監視装置84は、複数の測長システム100について逐時遠隔監視することができ、監視および報告による新たな新ビジネスモデルが提供される。すなわち、真空を生成する真空系および電子光学系を具えた遠隔に置かれた真空装置の監視方法において、契約によって予め定められた真空装置の前記真空系および電子光学系からの運転情報信号を、通信網を介してデータ入力し、画面表示処理を行い、前記真空系あるいは電子光学系を構成する構成部の基本監視データおよび運転履歴データを記憶し、前記真空装置について順次前記画面表示装置の画面に、前記構成部を表示し、および前記構成部の基本監視データと運転履歴データとを同時刻進行のタイムチャートとして比較して表示し、かつ前記タイムチャート上に真空系および電子光学系の構成部に跨って同一時刻位置を指定すると、該位置に対応した前記構成部の運転状況を合わせて表示し、かつ契約ごとに前記同時進行のタイムチャートと前記運転状況の報告を行う真空装置の監視方法が提供される。あるいは、真空を生成する真空系および電子光学の操作を行う弁系を具えた遠隔に置かれた真空装置の監視方法において、契約によって予め定められた真空装置の前記真空系および電子光学系からの運転情報信号を、通信網を介してデータ入力し、画面表示処理を行い、前記真空系および電子光学系を構成する構成部の基本監視データおよび運転履歴データを記憶し、前記真空装置について順次前記画面表示装置の画面に、前記構成部を表示し、および前記構成部の基本監視データと運転履歴データとを同時刻進行のタイムチャートとして比較して表示し、かつ前記タイムチャート上に真空系および電子光学系の構成部に跨って同一時刻位置を指定すると、該位置に対応した前記構成部の運転状況を合わせて表示し、かつ契約ごとに前記同時進行のタイムチャートから基本監視データと運転履歴データとの乖離の状況から予め定めた乖離に至る時期を予測し、次に点検時期の報告を行う。
【0029】
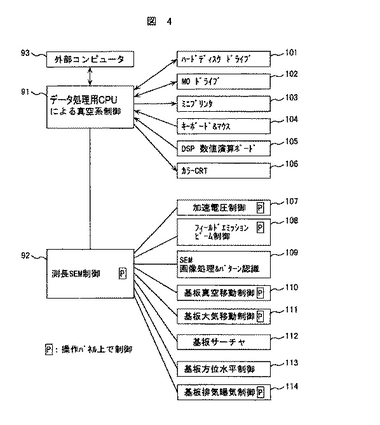
図4は、データ処理用CPU71による真空系制御91および測長SEM制御92の状況を示す。データ処理用CPU71は外部コンピュータ93と接続されている。真空系制御91は、ハードディスクドライブ101,MOドライブ102,キーボード&マウス104,DSP数値演算ボード105を使用してなされ、結果はミニプリンタ103,カラーCRT106上に表示される。
【0030】
測長SEM制御92は、加速電圧制御107,フィールドエミッションビーム制御108,SEM画像処理&パターン認識109,基板真空移動制御110,基板大気移動制御111,基板サーチャ112,基板方位水平制御113,排気曝気制御114によってなされる。
【0031】
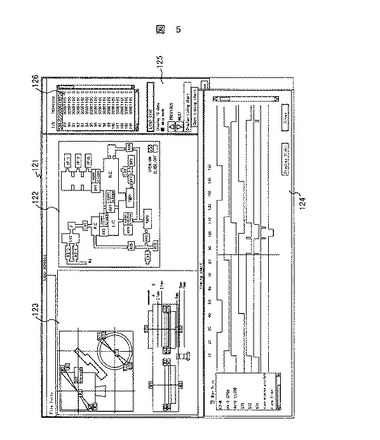
図5は、画像部12の画面に表示される表示画面の一例を示す。この例の場合、画面121には、排気系系統図122,試料搬送系状態図123およびタイムチャート124が表示され、画面121の側部に操作部125および装置の動作履歴部126が設けてある。
【0032】
このように、1つの画面に真空系の各構成部についてのタイムチャート124,タイムチャートに関連する1つ1つの構成部を表示する排気系系統図121あるいは試料搬送系状態図123が表示され、測長SEMに不具合が生じたような場合にその原因を究明し、対策を立てるに便利になる利点がある。
【0033】
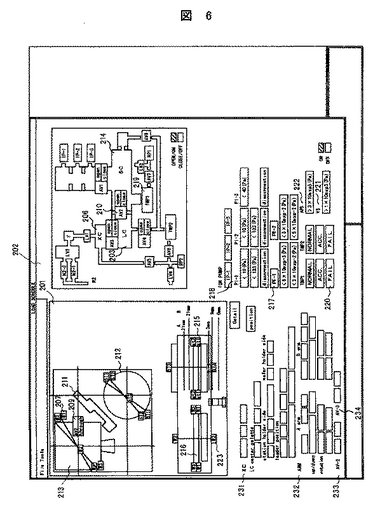
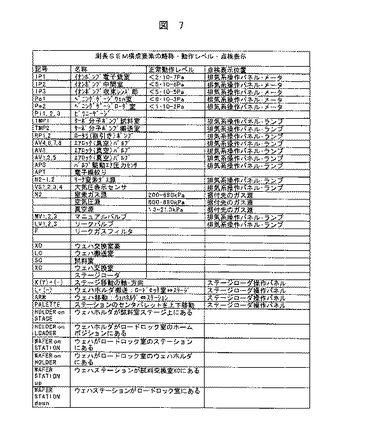
図6は、排気系系統図122の詳細を示し、図7は図6に使用される排気系構成部品についての記号,動作と点検のためのチェック位置をまとめて示す一覧図である。
【0034】
図6は、ディスプレイ部内に配置された表示パネルにおける一画面であり、ウェーハ搬送系(左側)と排気系(右側)の構成要素について、そのレイアウト(上側)と主要素の動作状態(下側)をランプで表示する構成になっている。
【0035】
ウェーハ搬送系のレイアウト(左上側)201はローダチャンバ(LC)203内を図式的に示す。204のST1から205のST3は試料交換室(XC)206内のウェーハが搬入・搬出された時のウェーハの設置状態を監視しているセンサである。ST1センサは、ウェーハが正しくステーションホルダに設置されたかを監視している。
【0036】
207のW1から208のW3は、ウェーハがウェーハホルダに設置された状態を監視しているセンサである。207のW1は、ウェーハが正しくウェーハホルダに設置されたか監視し、223のW2はウェーハが存在するか監視し、208のW3はウェーハが斜めになっていないか監視している。
【0037】
また、「AV2Though」209は、210のAV2が開いた時や、ウェーハホルダを試料室との間で搬入・搬出した後に、210のAV2上に異物が存在しないか監視している。
【0038】
LC内には、2本のウェーハ搬送アーム211があり、Aアームはウェーハをセンターパレット212からステーションホルダ213に搬送する時に使用される。
【0039】
ウェーハを試料室へ搬入する時は、エアロックバルブ(AV2)210を開けてレール上をSCへ送る。図中のST側ウェーハ215とW側ウェーハ216は、A、B2本のアームで交互にステーションホルダ側(ST)とウェーハホルダ側(W)のそれぞれ2枚分の搬送スペースを使って搬入・搬出される。
【0040】
ウェーハ搬送系を構成するチャンバは、206のXC、203のLC、214のSCの3室からなる。このうち中央に位置するLCの動作状態をモニターするパネル部分が本図の左下側にある。LED光位置センサで可動機構部の動きを検出し、ランプ表示する。
【0041】
一方、排気系のレイアウト(右上側)は、チャンバ、ポンプ、バルブ、配管を図式的に表示し、ポンプ、バルブについては、通電作動中と弁開放でランプ点灯、遮断休止中と弁閉鎖でランプ消灯で表示する。
【0042】
排気系の動作モニタパネルは真空ゲージによるポンプ切替え操作を自動的に行なっているため、ペニングゲージ(Pe)217とピラニーゲージ(Pi)218については、切替える真空度1〜2点でランプを点滅させパネル表示している。ターボ分子ポンプ(TMP)219については、特に、誤作動(Fail)220のランプ表示をして早期対策を計っている。大気圧センサ(APS)221とバルブ駆動用空気圧(APS)222も正常動作のランプ表示をしている。また、真空室内の圧力レベルは、大気圧の時には黒色、圧力が下がるにつれて、赤、黄、青、緑に変化し表示している。
【0043】
XC状況が231に、ARM(Aarm、Barm)の状況が232に、AV2の状況が233に、そしてAV−3の状況が234にそれぞれ表示される。
【0044】
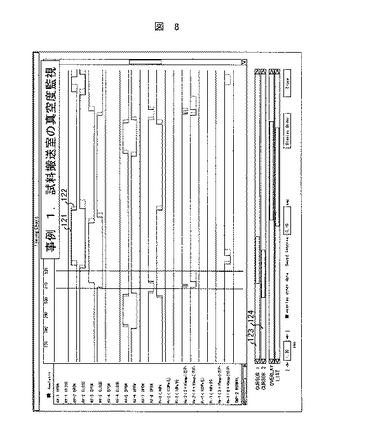
図8は、事例1で真空度監視のための各構成部品について、基本監視データと監視履歴データとを表示し、各データをオーバレイさせて比較できるようにしたタイムチャートを示す。図において、121は基本監視データを示し、122は監視履歴データを示し、図3に示す蓄積された基本データおよび監視データ79がワークステーション81の機能によって画面表示されたものである。
【0045】
図8に示す例の場合、Analysis項目としてのAV−1 OPEN,AV−1 CLOSE,AV−2 OPEN,AV−2 CLOSE,AV−3 OPEN,AV−3 CLOSE,AV−4 OPEN,AV−4 CLOSE,AV−5 OPEN,AV−5 CLOSE,AV−6 OPEN,AV−6 CLOSE,AV−7 OPEN,AV−8 OPEN,P:−3<40Pa,Pi−2<133Pa(L),Pi−2<10Pa(H),Pe−2<5×10exp(−2)P,Pe−2<3×10exp(−2)P,Pi−1<133Pa(L),Pi−1<10Pa(H),Pe−1<3×10exp(−2)P,Pe−1<6×10exp(−3)P,TMP−2Normalの各項目について同時刻並列方式で基本監視データ121,監視履歴データ122がそれぞれ黒および赤色で示してある。両データはオーバレイして比較され得る。
【0046】
図の下方にはカーソル(CURSOR)1,2(123,124)によって、各項目に跨って縦線2本123,124が引いてあり、この間における不具合が発生しているおそれのある項目、本例の場合、Pe−2<3×10exp(−2)Pがチェック項目として直ちに認識され得る。
【0047】
同様にしてカーソルを移動することによって両データ間に乖離が大きくなっている項目がチェック項目として直ちに認識される。
【0048】
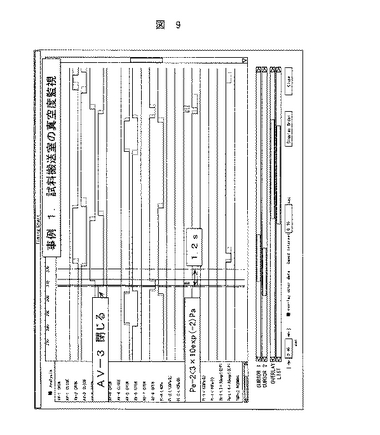
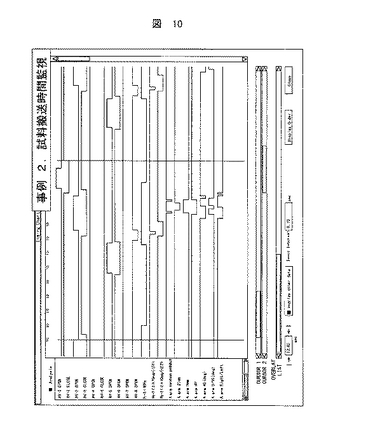
図9は、図8の例において、Pe−2の真空リカバー時間の違いを表示する。この事例は、AV−3バルブが閉じた時に、搬送室20の真空が一時的に悪くなり、元に戻る時の時間を示している。リファレンスデータである基本監視データ(黒線)ではAV−3が閉じてから0.4秒 で真空圧力が3×10−2Paに復帰しているが、計測した監視履歴データでは1.2秒 かかっている。時間差として0.8秒 13倍)あることが瞬時に判定される。従って、計測した項目の対象の装置には何らかの真空不良があることが認識される。しかし、その他の時間差については、両データ間にはほぼ乖離がなく、ほぼ同じであることから、AV−3バルブ動作について何らかの不具合が発生していることが予想される。このように、複数の項目で示される装置が同一時刻で並列されてタイムチャートの形で基本監視データおよび監視履歴データが表示されることによってAV−3バルブについて何らかの不具合が発生していることを容易に予想することができる。予想されたAV−3バルブについて直ちにチェックすべきことが報告,指示される。図10は、事例2を示し、試料搬送時間監視をタイムチャートを使用して行う例を示す。Analysis項目として、AV−2 OPEN,AV−2 CLOSE,AV−3 OPEN,AV−3 CLOSE,AV−4 OPEN,AV−4 CLOSE,AV−5 OPEN,AV−6 OPEN,AV−7 OPEN,AV−8 OPEN,Pi−3<40Pa,Pe−2<5×10exp(−2)P,Pe−2<3×10exp(−2)P,A arm rotation prohibit,A arm 21mm,A arm 0mm,A arm HP,A arm 45(deg),A arm 0/10(deg),A arm Right/Leftが採用され、カーソル123,124によってAV−2 CLOSEとAV−2 OPENに縦線が入れられ、この時間が計測され、事例1と同様に基本監視データと監視履歴データとのオーバレイがなされて対比,比較される。
【0049】
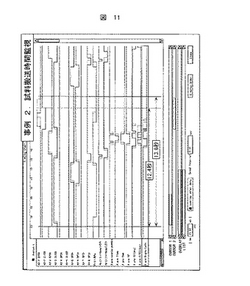
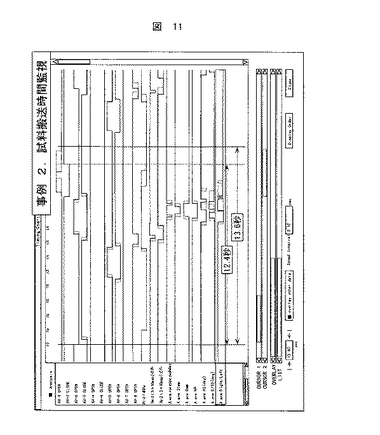
図11は、図10の例において、試料搬送時間の違いを表示する。この事例は、搬送シーケンスにおける試料搬送時間を比較した事例である。リファレンスデータでの搬送時間は12.4秒、監視データの時間は13.6秒で、リファレンスデータとの間には1.2秒 の遅れがある。通常10%(1.2秒)の違いは大きな問題ではないが、この事例では、Aアームの位置センサ(A arm Right/Left)の動作時間がリファレンスデータ1.9秒 に比べて監視データが3.1 秒と大きな違い(163%)があることが分る。これは、搬送アームAの動作速度が著しく低下しており、保守の必要性があることがこのタイムチャートから判断できる。このように、複数の項目、すなわちAV−2 CLOSEとAV−2 OPENを使用してこれらの動きをタイムチャートの形で両データを表示させることによって搬送アームAの動作に何らかの不具合が発生していることを容易に予想することができる。このようにして予想された搬送アームAについて直ちにチェックすべきことが報告,指示される。
【0050】
収集採取した過去の記録データから装置の不具合発生に至る過程(の状態)を動的に図でオーバレイして表示させる。また、各駆動系のタイミングチャート、真空バルブOPEN/CLOSEのタイミングチャートを自動生成する機能を内蔵させる(構築する)ことにより、装置状態をリアルタイムに監視することが可能となる。
【0051】
これらの真空に関するデータ収集機能を装置に付加することにより、全てセンサの状態をリアルタイムに一元的に監視記録することが可能となり、装置の保守管理や不具合対策に関しサービスマンの負担が軽減される。
【0052】
また、収集したデータを記録保存することにより、装置の動作状態の時間的推移が把握できるようになり、不具合発生時期の遡及や、不具合原因の絞込み,部品交換などの不具合対策の最適化が可能となる。
【0053】
その他に、装置不具合発生時の装置の動作状態を記録保存する機能を付加することにより、不具合発生時の装置状態を確認することを可能とする。
【0054】
基本監視データとしては、予め登録されたデータもしくは蓄積された運転履歴データの一部が採用される。
【0055】
a.基本データの構築
(1) 工場出検査時に、採取したデータと設計値テンプレートを比較し装置の状態を把握する。このデータから異常と判断された装置は不良と判断される。
(2) (1)の比較結果から正常と判断された装置は、工場出荷時に採取したデータをその装置のリファレンスデータとしてデータベースに登録される。
(3) 顧客据付時に据付時のリファレンスデータを採取,登録(顧客先でのリファレンスデータ採取登録は、据付環境により真空排気速度が変化するため採取する。)
(4) 据付後の装置状態の確認
(2)と(3)のデータを比較することにより、装置の据付時での状態を把握する。この比データから据付後の装置の状態が正常であるか異常であるか判断する。
(5) 判断方法
据付先設置状況で変化する装置状態は、主に真空排気速度の変化が考えられる。これは、据付先での真空ポンプと装置間の配管の長さ,配管径やポンプの排気速度(真空排気能力)に左右されるからである。
【0056】
上記環境の変化で影響を受ける装置状態は以下の通りである。
真空ゲージの推移・試料の搬入等がある。排気能力から下記の式により正常か異常か判定する。
【0057】
工場環境での排気能力 :Pf
据付環境での排気能力 :Pi
工場環境での真空ゲージの推移 :Gf
据付環境での真空ゲージの推移 :Gi
工場環境での試料の搬入速度 :Lf
据付環境での試料の搬入速度 :Li
判定閾値 :S(%)
補正率 :Co=Pf/Pi
判定用データ算出
真空ゲージ(RefG)=Co×Gf 搬入速度(RefL)=Co×Lf
据付時の真空ゲージ推移判定
S>|Gi/RefG×100−100|
据付時の試料搬入速度
S>|Li/RefL×100−100|
【0058】
(6) 据付環境に合わせたリファレンステンプレートの作成
RefGとRefLを据付環境に合わせた状態テンプレートとしてデータベースに登録する。但し、その他のテンプレートは設計値を使用する。
【0059】
b.顧客引渡し後のデータの採取と自動解析
(1) 装置状態データの採取は、予め決められたシーケンスで試料の搬入,測定、搬出を行う。
(2) データ採取スケジュールは、顧客毎に設定可能である。データ取得タイミングは、装置が使用されていない時間に行う。但し、予め設定されている時間から1時間以上待っても装置が使用されている場合は、取得スケジュールはキャンセルされる。また、顧客が手動でデータ採取シーケンスを起動する事も可能である。
(3) 自動的に採取された装置状態データは、予め登録されている装置状態テンプレートと比較される。その比較したデータが設定されている閾値を超えた場合は、装置データベースに情報を登録する。また設定により顧客あるいはサービスヘレポート(報告)する。
この機能により予防保全効果、及び装置保守時期の把握が可能となる。
【0060】
c.装置不具合発生時の処理
(1) エラートラップ機能により、エラー発生時の装置状態を採取する。
その時同時に、装置内部通信の内容を保存する。
(2) エラー発生時の装置状態と据付時のリファレンスデータを比較して、装置不具合原因特定する。
この機能により装置不具合発生時の対策が可能となる。
【0061】
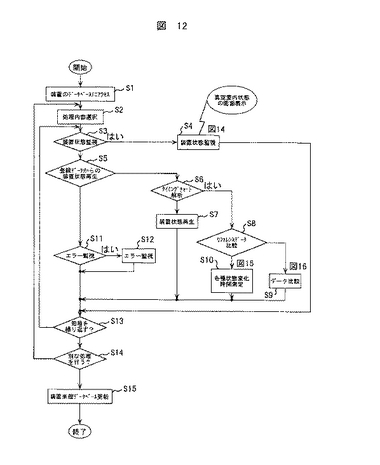
図12は、測長SEMのコンピュータシステムにおける装置の保守と不具合の監視を支援するフローの全体図であり、図13から図15は、図12の要部を詳細に示した部分図である。図12において、装置のデータベースにアクセスし(S1)、処理内容を選択し(S2)、装置状態監視をするか判断する(S3)。はいの場合、装置状態の監視を行う(S4)。ここで、リアルタイムに装置状態監視データの保存を行う。
【0062】
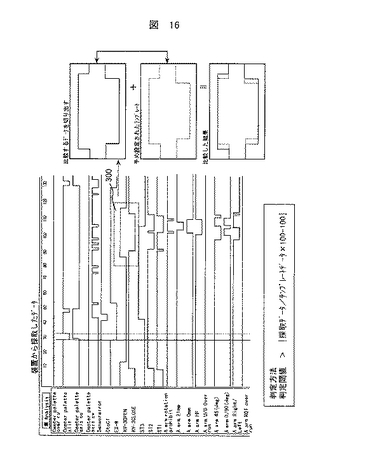
ステップS3からステップS5に移行して、登録データからの装置状態再生し、タイミングチャートの解析を行うかを判断し(S6)、装置状態再生する(S7)。ここで、保存された装置状態監視データの再生を行う。リファレンスデータとの比較を行うかを判断する(S8)。両データの比較を行うか(S9)、各種状態変化時間測定を行う(S10)。両データの比較は、先に述べた事例1,事例2に沿って行うが、この場合に、図16に示すようにテンプレート比較,判定を行ってもよい。図13において、ステップS8において装置から採取した一部のデータ300について、比較するデータを切り出し、予め設定されたプレートに貼付けして比較と結果を表示することを行ってもよい。
【0063】
判定方法は、
判定閾値>|採取データ/テンプレートデータ×100−100|
によって行う。
【0064】
図12において、ステップS5からS11に移行してエラー監視を行うかを判断し(S11)、エラー監視を行う。
【0065】
ステップS13で処理を繰り返すかを判断し、更に別な処理を行うかを判断し(S14)、装置の来歴データベースの更新を行う(S15)。
【0066】
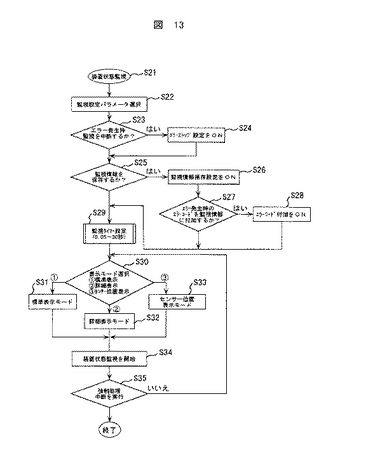
図13は、ステップS4の装置状態監視を行うフローを示す。図において、装置状態監視(S21)を行う場合、監視設定パラメータ選択を行い(S22)、エラー発生時監視を中断するかを判断し、エラーストップ設定をONにして(S24)、監視情報を保存するかを判断し(S25)、監視情報保存設定をONにする(S26)。
【0067】
エラー発生時のエラーコードを監視情報に付加するかを判断し(S27)、エラーコード付加をONにして(S28)、ステップS29に移行して監視タイマー設定(0.05〜30秒)を行う(S29)。表示モードの選択を行うかを判断し(S30)、標準表示モード(S31),詳細モード(S32),センサ位置表示モード(S33)を選択する。選択されたモードによって装置状態監視を開始し(S34)、強制処理中断を実行するかを判断し(S35)、終了する。
【0068】
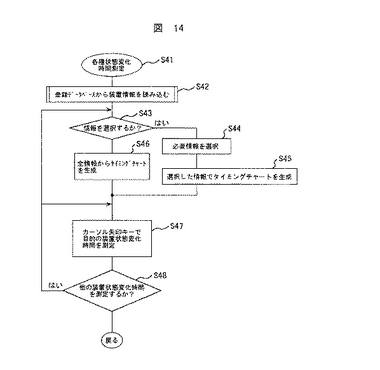
図14は、ステップS10の詳細フローを示す。図において、各種状態変化時間を測定するに当って(S41)、登録データベースから装置情報を読み込み(S42)、情報を選択するかを判断し(S43)、必要情報を選択し(S44)、選択した情報でタイミングチャートを生成する(S45)。また、全情報からタイミングチャートを生成し(S46)、カーソル矢印キーで目的の装置状態変化時間を測定し(S47)、他の装置状態変化時間を測定するかを判断し(S48)、戻るに至る。
【0069】
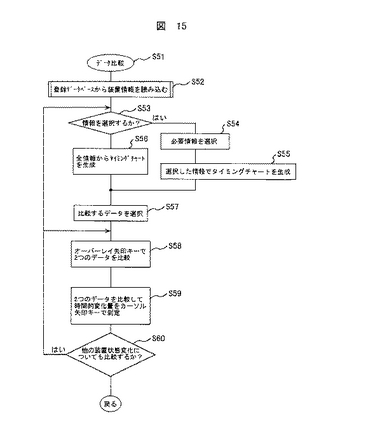
図15は、ステップS11の詳細フローを示す。図において、データ比較をするに当って(S51)、登録データベースから装置情報を読み込み(S52)、情報を選択するかを判断し(S53)、必要情報を選択し(S54)、選択した情報でタイミングチャートを生成する(S55)。また、全情報からタイミングチャートを生成し(S56)、比較するデータを選択し(S57)、オーバレイ矢印キーで2つのデータを比較する(S58)。2つのデータを比較して時間的変化量をカーソル矢印キーで測定し(S59)、他の装置状態変化についても比較するかを判断し(S60)、戻るに至る。
【0070】
以上のように、これらのステップによれば、
(1) 装置の状態を定期的に採取し装置状態データベースが構築される。
(2) 採取したデータは、データベースに登録したデータと比較することが可能。
(3) エラートラップ機能により装置に異常が発生した時の状態を再生することが可能。異常状態と正常時のデータを比較することにより、不具合原因の特定が飛躍的に向上する。
(4) 設計値の各センサON/OFFタイミングや機構系動作スピードをテンプレート化して、採取データと比較可能とする。また、テンプレート比較時に採取データとの差を自動的に算出し、予め設定した閾値を超えた場合にはデータベースに情報を保存する。この機能付加により定期保守や予防保全に対応する。
以上のことが可能になる。
【0071】
以上述べた構成によれば、次のようなシステムおよび方法が提供される。
【0072】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援システムにおいて、計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、装置の保守・診断を支援し、診断データを保存活用するシステムおよび方法。
【0073】
測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援システムを適用するシステムおよび方法。
【0074】
初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存するシステムおよび方法。
【0075】
計測装置の動作状態を遠隔装置で監視するか、差異検知タイミングを遠隔装置で警報するシステムおよび方法。
【0076】
真空中において加速電子線を応用する計測装置として、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計を用いるシステ
ムおよび方法。
【0077】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視するシステムおよび方法。
【図面の簡単な説明】
【0078】
【図1】本発明の実施例である測長システムの概略構成図。
【図2】測長システムの一部詳細構成図。
【図3】本発明の実施例のついてのブロック図。
【図4】データ処理状態図。
【図5】表示画面の一例を示す表示画面図。
【図6】排気系系統図の詳細を示す表示画面図。
【図7】チェック位置をまとめて示す一覧図。
【図8】タイムチャート図。
【図9】タイムチャート図。
【図10】タイムチャート図。
【図11】タイムチャート図。
【図12】フローチャート図。
【図13】フローチャート図。
【図14】フローチャート図。
【図15】フローチャート図。
【図16】テンプレート比較、判断図。
【符号の説明】
【0079】
10…大気搬送部、11…測長部、12…画像部、15…カセット、16…カセット台、17…搬送装置、18…搬送本体、19…ロードロック室、20…搬送室、21…測定室(試料室)、30…電子光学鏡体、31…試料台、32…試
料ステージ、68…搬送制御、69…真空制御、70…制御用CPU、71…データ処理用CPU、72…電子光学制御、73…画像処理、74…高電圧制御、75…ハードディスク、76…データ処理、77…画像表示処理、78…画面表示、79…画面表示、79…基本データ蓄積、監視データ蓄積、81…データ解析、分析、判定、100…測長システム、121…画面、122…排気系系統図、123…試料搬送系状態図、124…タイムチャート。
【技術分野】
【0001】
本発明は、測長SEM(走査顕微鏡)あるいは真空処理装置を備えた半導体製造装置などの真空部を備えた真空系装置(以下、真空装置という)の監視方法および監視システムに関する。
【背景技術】
【0002】
従来、真空装置内の状態を把握するために専用の測定装置あるいは専用の真空計などを装置に接続して必要とされた都度真空内部の状態の監視を行っていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の装置でリアルタイムに装置の状態を監視するためには、各種センサ類に計測装置を接続した状態を計測し、計測結果のデータを解析することを要した。真空装置内には、数多くのセンサ類が設けられるのが普通であり、センサの状態を同時に計測することには困難があるため同時刻における真空装置各部の状況把握は行われず、1つ1つの解析に留まっていた。特に半導体基板の製造に使用される測長SEMには自動化のために非常に多くのセンサが装置の真空室(部)内に存在する。半導体製造装置にあっても同じである。このような真空装置において全てのセンサの状態をリアルタイムに一元的に監視することは困難であった。リアルタイムに一元的に監視しない場合には、装置の保守管理あるいは不具合対策を行うときに多大の負担を避けられないでいた。
【0004】
本発明は、かかる点に鑑み、真空装置の各種センサからのデータに基づいて同一時刻についてリアルタイムで監視すると同等の監視方法を提供して、装置の保守管理あるいは不具合対策を簡便かつ一元的に行うことのできる監視装置および方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の実施態様によれば、真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援の方法であって、計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、前記計測装置の保守・診断を支援するものである。
【発明の効果】
【0006】
計測手段である加速電子線は、真空中で発生させなければならないために、従来その保守管理や診断修理をするためには、大気を装置内に入れて開放しなければならず、これが保守診断を難しくしていた。装置内の電子光学系,真空排気系,試料駆動系の機能性能に関する複数の位置と動き、真空度とガス成分,時間と速度,画像情報などをセンシングすることにより、初期状態や正常動作状態との比較をオンラインで同一時刻についてリアルタイムにできるので、保守作業,不具合原因究明から対策修理までが最適に即時に対応できるようになる。
【発明を実施するための最良の形態】
【0007】
以下、本発明にかかる実施例を図面に基づいて説明する。
【0008】
真空装置の内、以下、測長SEMを例にとって説明するが、本発明は真空部を有する真空装置に適用可能である。
【0009】
図1は、本発明の実施例である測長SEMによる測長システムの構成を示し、図2は、測長SEMの機能である電子光学系構成を示す。これらの図において、測長システム100は、大気搬送部10を有する大気搬送系、試料搬送および測長部11を有する真空系、画像部12を有する表示観察・操作系からなる。
【0010】
大気搬送部10は、複数の試料である基板を収納,保持するカセット(すなわちフープ)15,カセット台16,カセット15内に延びて基板の搬入出を行う腕を有する搬送装置17からなる。搬送装置17は搬送のためのロボットから構成され、真空中あるいは制御された大気中に配置される。ロボットはX軸,Y軸およびZ軸方向に移動する移動部を有し、水平方向に回転可能である。前述した腕はロードロック室19まで延在することができる。
【0011】
試料搬送および測長部11は、搬送本体18、前述したロードロック室(ダブルロードロック室としてもよい)19、搬送室20および測定室21(試料室)からなる。
【0012】
搬送室20、測定室21にはそれぞれ真空形成装置22,23が接続してあり、搬送室20、測定室21を真空あるいは制御された大気圧に制御することが行われる。真空形成装置22,23は、排気系を形成する真空形成制御装置(図示せず)によって制御される。
【0013】
測定室21には、図示したように、電子光学鏡体30が配置される。電子光学鏡体30の下方には、試料台31および試料台固定および制御のための試料ステージ32が設けられる。
【0014】
また、測定室21には、図示したように、電子光学鏡体30に並行して光学顕微鏡付きCCDカメラ35が配置される。
【0015】
図2において、測長システム100を構成する電子光学鏡体30は、周知のように、電子光学系(鏡筒部),試料室,排気系,表示観察・操作系からなる。電子光学系は、加速電子を発生する電子銃を構成するフィラメント電源40とフィラメント41,加速電子の束39(一次電子線)を絞り込んで細束化するレンズ系,試料から発生する二次電子などを検出する検出器47(SE/BSE)から構成される。電子銃は、あるエネルギーを持った加速電子を発生させる源となる部分であり、コンデンサーレンズ43(集束レンズ)は、引出電極および陽極によって構成され、陰極には加速電圧源44によって加速電圧が印加される。レンズ系には集束レンズ,対物レンズ,対物レンズ絞り,走査コイル,非点補正装置42などが装着されている。図において、45は対物レンズを示し、48はEXBフィルタを示す。対物レンズ45には電圧を印加するためのブースタ電圧源49が設けられる。検出器47は、二次電子と反射電子46を検出するための装置であり、二次電子はエネルギーが低いのでコレクタにより捕獲され、シンチレータにより光電子に変換されて光電子増倍管で信号増幅される。反射電子の検出にはシンチレータあるいは半導体型が用いられる。
【0016】
試料室である測定室には試料台が置かれ、この上に、ウェーハなどの基材50(試料)が載置され、試料ステージ,試料導入装置,X線検出用分光器などが取り付けられる。基板50には電圧を印加するためのリーターディング電圧源51が設けられる。試料ステージは、X,Y,Z移動,回転,傾斜機能を持つ。真空系の排気装置にはロータリポンプ,油拡散ポンブなどが使用される。
【0017】
表示観察,操作系は、二次電子像,反射電子像,X線像などを画像部12に表示する。像表示・観察しながら照射電流の調整・焦点合せなどを行う。二次電子像などの出力であるアナログ信号はデジタル信号に変換され画像部12に表示され、各種解析(測定)に使用される。またこの画像は、後述するように通信回線である通信網を介して遠隔地にある監視装置に画像信号を送信することができる。また、表示観察・操作系には、試料搬送および測長部11内の真空度監視のためのタイムチャートあるいは各部の操作状況を画像として表示する。この画像信号は、通信回線を介して遠隔地にある監視装置に送信され、真空装置の各部の状況が遠隔監定されて保守管理,不具合調整に使用される。
【0018】
図3は、本発明の実施例をブロック図で示す。
図において、真空系200は、A群としての試料位置監視61,搬送系位置監視62および処理時間監視63が、そしてB群としてのバルブ位置監視64,圧力監視65,真空監視66および処理時間監視67がなされ、A群によって監視されて得られたデータに基づいて搬送制御68が、そしてB群によって監視されて得られたデータに基づいて真空制御69がなされる。これらの制御のために制御用CPU70が使用される。
【0019】
制御用CPU70は、データ処理用CPU71に接続されており、更に電子光学制御72,画像処理73,高電圧制御74を行うことができる。
【0020】
データ処理用CPU71は、ハードディスク75に接続されており、データ処理76および画像表示処理77を行うことができる。すなわち、画像表示処理をして画像表示装置である画像部12に画面表示78を行うための画像表示処理装置としての機能を有する。
【0021】
ハードディスク75には、基本データとしての基本監視データおよび監視データとしての運転履歴データ(リファレンスデータ)が蓄積(基本データ蓄積,監視データ蓄積79)がなされる。
【0022】
データ処理用CPU71は、装置表示処理装置,データ解析,分析,判定81を行う機能を有する。これらの機能は、図に示すように、
を有する。
【0023】
タイミングチャートを生成し表示する処理機能は、画面表示装置の画面に、装置構成、特に真空系各部の基本運転監視データと運転履歴データとを同時進行のタイムチャートとして比較して表示することができる。この場合に、蓄積された基本監視データと運転履歴データとが使用され、並列する形で表示される。
【0024】
これらの結果は、画面表示78として、装置状態表示,タイミングチャート表示,比較データとしての表示82がなされる。
【0025】
以上のように、真空系について、各部を監視する監視センサから運転状況が逐時報告されて運転履歴データとして蓄積され、装置状態監視要求がなされると、蓄積された基本監視データと共に運転履歴データが同時進行の形で並列表示され、両者のデータ間の乖離状況がタイミングチャートで色表示によって区別されて表示される。また、各部の構成部分が装置状態の動きをして連動して表示される。
【0026】
データ処理用CPU71上の画像部12の画面に、表示82で示すように表示された装置状態,タイミングチャート,比較データから真空系の保守管理あるいは不具合調整のための分析,判定を監視する人間、あるいはサービスマンが行うことができるが、更にデータ処理用CPU71の機能を生かして自動的にデータ解析を行い、分析,判定を行って自動表示するようにしてもよい。
【0027】
他の手法としては、データ処理用CPU71の機能を簡便化して通信機能を有するものとし、画面表示78される内容を通信網83を介して監視装置84に表示するようにすることもできる。この場合、ハードディスク75の基本データ蓄積,監視データ蓄積79機能は、顧客データ蓄積85として監視装置84に蓄積される。また、監視装置84は、画面表示78としての機能を有し、表示82に示す各種の表示を行うことになる。
【0028】
この手法にあっては、監視装置84は、複数の測長システム100について逐時遠隔監視することができ、監視および報告による新たな新ビジネスモデルが提供される。すなわち、真空を生成する真空系および電子光学系を具えた遠隔に置かれた真空装置の監視方法において、契約によって予め定められた真空装置の前記真空系および電子光学系からの運転情報信号を、通信網を介してデータ入力し、画面表示処理を行い、前記真空系あるいは電子光学系を構成する構成部の基本監視データおよび運転履歴データを記憶し、前記真空装置について順次前記画面表示装置の画面に、前記構成部を表示し、および前記構成部の基本監視データと運転履歴データとを同時刻進行のタイムチャートとして比較して表示し、かつ前記タイムチャート上に真空系および電子光学系の構成部に跨って同一時刻位置を指定すると、該位置に対応した前記構成部の運転状況を合わせて表示し、かつ契約ごとに前記同時進行のタイムチャートと前記運転状況の報告を行う真空装置の監視方法が提供される。あるいは、真空を生成する真空系および電子光学の操作を行う弁系を具えた遠隔に置かれた真空装置の監視方法において、契約によって予め定められた真空装置の前記真空系および電子光学系からの運転情報信号を、通信網を介してデータ入力し、画面表示処理を行い、前記真空系および電子光学系を構成する構成部の基本監視データおよび運転履歴データを記憶し、前記真空装置について順次前記画面表示装置の画面に、前記構成部を表示し、および前記構成部の基本監視データと運転履歴データとを同時刻進行のタイムチャートとして比較して表示し、かつ前記タイムチャート上に真空系および電子光学系の構成部に跨って同一時刻位置を指定すると、該位置に対応した前記構成部の運転状況を合わせて表示し、かつ契約ごとに前記同時進行のタイムチャートから基本監視データと運転履歴データとの乖離の状況から予め定めた乖離に至る時期を予測し、次に点検時期の報告を行う。
【0029】
図4は、データ処理用CPU71による真空系制御91および測長SEM制御92の状況を示す。データ処理用CPU71は外部コンピュータ93と接続されている。真空系制御91は、ハードディスクドライブ101,MOドライブ102,キーボード&マウス104,DSP数値演算ボード105を使用してなされ、結果はミニプリンタ103,カラーCRT106上に表示される。
【0030】
測長SEM制御92は、加速電圧制御107,フィールドエミッションビーム制御108,SEM画像処理&パターン認識109,基板真空移動制御110,基板大気移動制御111,基板サーチャ112,基板方位水平制御113,排気曝気制御114によってなされる。
【0031】
図5は、画像部12の画面に表示される表示画面の一例を示す。この例の場合、画面121には、排気系系統図122,試料搬送系状態図123およびタイムチャート124が表示され、画面121の側部に操作部125および装置の動作履歴部126が設けてある。
【0032】
このように、1つの画面に真空系の各構成部についてのタイムチャート124,タイムチャートに関連する1つ1つの構成部を表示する排気系系統図121あるいは試料搬送系状態図123が表示され、測長SEMに不具合が生じたような場合にその原因を究明し、対策を立てるに便利になる利点がある。
【0033】
図6は、排気系系統図122の詳細を示し、図7は図6に使用される排気系構成部品についての記号,動作と点検のためのチェック位置をまとめて示す一覧図である。
【0034】
図6は、ディスプレイ部内に配置された表示パネルにおける一画面であり、ウェーハ搬送系(左側)と排気系(右側)の構成要素について、そのレイアウト(上側)と主要素の動作状態(下側)をランプで表示する構成になっている。
【0035】
ウェーハ搬送系のレイアウト(左上側)201はローダチャンバ(LC)203内を図式的に示す。204のST1から205のST3は試料交換室(XC)206内のウェーハが搬入・搬出された時のウェーハの設置状態を監視しているセンサである。ST1センサは、ウェーハが正しくステーションホルダに設置されたかを監視している。
【0036】
207のW1から208のW3は、ウェーハがウェーハホルダに設置された状態を監視しているセンサである。207のW1は、ウェーハが正しくウェーハホルダに設置されたか監視し、223のW2はウェーハが存在するか監視し、208のW3はウェーハが斜めになっていないか監視している。
【0037】
また、「AV2Though」209は、210のAV2が開いた時や、ウェーハホルダを試料室との間で搬入・搬出した後に、210のAV2上に異物が存在しないか監視している。
【0038】
LC内には、2本のウェーハ搬送アーム211があり、Aアームはウェーハをセンターパレット212からステーションホルダ213に搬送する時に使用される。
【0039】
ウェーハを試料室へ搬入する時は、エアロックバルブ(AV2)210を開けてレール上をSCへ送る。図中のST側ウェーハ215とW側ウェーハ216は、A、B2本のアームで交互にステーションホルダ側(ST)とウェーハホルダ側(W)のそれぞれ2枚分の搬送スペースを使って搬入・搬出される。
【0040】
ウェーハ搬送系を構成するチャンバは、206のXC、203のLC、214のSCの3室からなる。このうち中央に位置するLCの動作状態をモニターするパネル部分が本図の左下側にある。LED光位置センサで可動機構部の動きを検出し、ランプ表示する。
【0041】
一方、排気系のレイアウト(右上側)は、チャンバ、ポンプ、バルブ、配管を図式的に表示し、ポンプ、バルブについては、通電作動中と弁開放でランプ点灯、遮断休止中と弁閉鎖でランプ消灯で表示する。
【0042】
排気系の動作モニタパネルは真空ゲージによるポンプ切替え操作を自動的に行なっているため、ペニングゲージ(Pe)217とピラニーゲージ(Pi)218については、切替える真空度1〜2点でランプを点滅させパネル表示している。ターボ分子ポンプ(TMP)219については、特に、誤作動(Fail)220のランプ表示をして早期対策を計っている。大気圧センサ(APS)221とバルブ駆動用空気圧(APS)222も正常動作のランプ表示をしている。また、真空室内の圧力レベルは、大気圧の時には黒色、圧力が下がるにつれて、赤、黄、青、緑に変化し表示している。
【0043】
XC状況が231に、ARM(Aarm、Barm)の状況が232に、AV2の状況が233に、そしてAV−3の状況が234にそれぞれ表示される。
【0044】
図8は、事例1で真空度監視のための各構成部品について、基本監視データと監視履歴データとを表示し、各データをオーバレイさせて比較できるようにしたタイムチャートを示す。図において、121は基本監視データを示し、122は監視履歴データを示し、図3に示す蓄積された基本データおよび監視データ79がワークステーション81の機能によって画面表示されたものである。
【0045】
図8に示す例の場合、Analysis項目としてのAV−1 OPEN,AV−1 CLOSE,AV−2 OPEN,AV−2 CLOSE,AV−3 OPEN,AV−3 CLOSE,AV−4 OPEN,AV−4 CLOSE,AV−5 OPEN,AV−5 CLOSE,AV−6 OPEN,AV−6 CLOSE,AV−7 OPEN,AV−8 OPEN,P:−3<40Pa,Pi−2<133Pa(L),Pi−2<10Pa(H),Pe−2<5×10exp(−2)P,Pe−2<3×10exp(−2)P,Pi−1<133Pa(L),Pi−1<10Pa(H),Pe−1<3×10exp(−2)P,Pe−1<6×10exp(−3)P,TMP−2Normalの各項目について同時刻並列方式で基本監視データ121,監視履歴データ122がそれぞれ黒および赤色で示してある。両データはオーバレイして比較され得る。
【0046】
図の下方にはカーソル(CURSOR)1,2(123,124)によって、各項目に跨って縦線2本123,124が引いてあり、この間における不具合が発生しているおそれのある項目、本例の場合、Pe−2<3×10exp(−2)Pがチェック項目として直ちに認識され得る。
【0047】
同様にしてカーソルを移動することによって両データ間に乖離が大きくなっている項目がチェック項目として直ちに認識される。
【0048】
図9は、図8の例において、Pe−2の真空リカバー時間の違いを表示する。この事例は、AV−3バルブが閉じた時に、搬送室20の真空が一時的に悪くなり、元に戻る時の時間を示している。リファレンスデータである基本監視データ(黒線)ではAV−3が閉じてから0.4秒 で真空圧力が3×10−2Paに復帰しているが、計測した監視履歴データでは1.2秒 かかっている。時間差として0.8秒 13倍)あることが瞬時に判定される。従って、計測した項目の対象の装置には何らかの真空不良があることが認識される。しかし、その他の時間差については、両データ間にはほぼ乖離がなく、ほぼ同じであることから、AV−3バルブ動作について何らかの不具合が発生していることが予想される。このように、複数の項目で示される装置が同一時刻で並列されてタイムチャートの形で基本監視データおよび監視履歴データが表示されることによってAV−3バルブについて何らかの不具合が発生していることを容易に予想することができる。予想されたAV−3バルブについて直ちにチェックすべきことが報告,指示される。図10は、事例2を示し、試料搬送時間監視をタイムチャートを使用して行う例を示す。Analysis項目として、AV−2 OPEN,AV−2 CLOSE,AV−3 OPEN,AV−3 CLOSE,AV−4 OPEN,AV−4 CLOSE,AV−5 OPEN,AV−6 OPEN,AV−7 OPEN,AV−8 OPEN,Pi−3<40Pa,Pe−2<5×10exp(−2)P,Pe−2<3×10exp(−2)P,A arm rotation prohibit,A arm 21mm,A arm 0mm,A arm HP,A arm 45(deg),A arm 0/10(deg),A arm Right/Leftが採用され、カーソル123,124によってAV−2 CLOSEとAV−2 OPENに縦線が入れられ、この時間が計測され、事例1と同様に基本監視データと監視履歴データとのオーバレイがなされて対比,比較される。
【0049】
図11は、図10の例において、試料搬送時間の違いを表示する。この事例は、搬送シーケンスにおける試料搬送時間を比較した事例である。リファレンスデータでの搬送時間は12.4秒、監視データの時間は13.6秒で、リファレンスデータとの間には1.2秒 の遅れがある。通常10%(1.2秒)の違いは大きな問題ではないが、この事例では、Aアームの位置センサ(A arm Right/Left)の動作時間がリファレンスデータ1.9秒 に比べて監視データが3.1 秒と大きな違い(163%)があることが分る。これは、搬送アームAの動作速度が著しく低下しており、保守の必要性があることがこのタイムチャートから判断できる。このように、複数の項目、すなわちAV−2 CLOSEとAV−2 OPENを使用してこれらの動きをタイムチャートの形で両データを表示させることによって搬送アームAの動作に何らかの不具合が発生していることを容易に予想することができる。このようにして予想された搬送アームAについて直ちにチェックすべきことが報告,指示される。
【0050】
収集採取した過去の記録データから装置の不具合発生に至る過程(の状態)を動的に図でオーバレイして表示させる。また、各駆動系のタイミングチャート、真空バルブOPEN/CLOSEのタイミングチャートを自動生成する機能を内蔵させる(構築する)ことにより、装置状態をリアルタイムに監視することが可能となる。
【0051】
これらの真空に関するデータ収集機能を装置に付加することにより、全てセンサの状態をリアルタイムに一元的に監視記録することが可能となり、装置の保守管理や不具合対策に関しサービスマンの負担が軽減される。
【0052】
また、収集したデータを記録保存することにより、装置の動作状態の時間的推移が把握できるようになり、不具合発生時期の遡及や、不具合原因の絞込み,部品交換などの不具合対策の最適化が可能となる。
【0053】
その他に、装置不具合発生時の装置の動作状態を記録保存する機能を付加することにより、不具合発生時の装置状態を確認することを可能とする。
【0054】
基本監視データとしては、予め登録されたデータもしくは蓄積された運転履歴データの一部が採用される。
【0055】
a.基本データの構築
(1) 工場出検査時に、採取したデータと設計値テンプレートを比較し装置の状態を把握する。このデータから異常と判断された装置は不良と判断される。
(2) (1)の比較結果から正常と判断された装置は、工場出荷時に採取したデータをその装置のリファレンスデータとしてデータベースに登録される。
(3) 顧客据付時に据付時のリファレンスデータを採取,登録(顧客先でのリファレンスデータ採取登録は、据付環境により真空排気速度が変化するため採取する。)
(4) 据付後の装置状態の確認
(2)と(3)のデータを比較することにより、装置の据付時での状態を把握する。この比データから据付後の装置の状態が正常であるか異常であるか判断する。
(5) 判断方法
据付先設置状況で変化する装置状態は、主に真空排気速度の変化が考えられる。これは、据付先での真空ポンプと装置間の配管の長さ,配管径やポンプの排気速度(真空排気能力)に左右されるからである。
【0056】
上記環境の変化で影響を受ける装置状態は以下の通りである。
真空ゲージの推移・試料の搬入等がある。排気能力から下記の式により正常か異常か判定する。
【0057】
工場環境での排気能力 :Pf
据付環境での排気能力 :Pi
工場環境での真空ゲージの推移 :Gf
据付環境での真空ゲージの推移 :Gi
工場環境での試料の搬入速度 :Lf
据付環境での試料の搬入速度 :Li
判定閾値 :S(%)
補正率 :Co=Pf/Pi
判定用データ算出
真空ゲージ(RefG)=Co×Gf 搬入速度(RefL)=Co×Lf
据付時の真空ゲージ推移判定
S>|Gi/RefG×100−100|
据付時の試料搬入速度
S>|Li/RefL×100−100|
【0058】
(6) 据付環境に合わせたリファレンステンプレートの作成
RefGとRefLを据付環境に合わせた状態テンプレートとしてデータベースに登録する。但し、その他のテンプレートは設計値を使用する。
【0059】
b.顧客引渡し後のデータの採取と自動解析
(1) 装置状態データの採取は、予め決められたシーケンスで試料の搬入,測定、搬出を行う。
(2) データ採取スケジュールは、顧客毎に設定可能である。データ取得タイミングは、装置が使用されていない時間に行う。但し、予め設定されている時間から1時間以上待っても装置が使用されている場合は、取得スケジュールはキャンセルされる。また、顧客が手動でデータ採取シーケンスを起動する事も可能である。
(3) 自動的に採取された装置状態データは、予め登録されている装置状態テンプレートと比較される。その比較したデータが設定されている閾値を超えた場合は、装置データベースに情報を登録する。また設定により顧客あるいはサービスヘレポート(報告)する。
この機能により予防保全効果、及び装置保守時期の把握が可能となる。
【0060】
c.装置不具合発生時の処理
(1) エラートラップ機能により、エラー発生時の装置状態を採取する。
その時同時に、装置内部通信の内容を保存する。
(2) エラー発生時の装置状態と据付時のリファレンスデータを比較して、装置不具合原因特定する。
この機能により装置不具合発生時の対策が可能となる。
【0061】
図12は、測長SEMのコンピュータシステムにおける装置の保守と不具合の監視を支援するフローの全体図であり、図13から図15は、図12の要部を詳細に示した部分図である。図12において、装置のデータベースにアクセスし(S1)、処理内容を選択し(S2)、装置状態監視をするか判断する(S3)。はいの場合、装置状態の監視を行う(S4)。ここで、リアルタイムに装置状態監視データの保存を行う。
【0062】
ステップS3からステップS5に移行して、登録データからの装置状態再生し、タイミングチャートの解析を行うかを判断し(S6)、装置状態再生する(S7)。ここで、保存された装置状態監視データの再生を行う。リファレンスデータとの比較を行うかを判断する(S8)。両データの比較を行うか(S9)、各種状態変化時間測定を行う(S10)。両データの比較は、先に述べた事例1,事例2に沿って行うが、この場合に、図16に示すようにテンプレート比較,判定を行ってもよい。図13において、ステップS8において装置から採取した一部のデータ300について、比較するデータを切り出し、予め設定されたプレートに貼付けして比較と結果を表示することを行ってもよい。
【0063】
判定方法は、
判定閾値>|採取データ/テンプレートデータ×100−100|
によって行う。
【0064】
図12において、ステップS5からS11に移行してエラー監視を行うかを判断し(S11)、エラー監視を行う。
【0065】
ステップS13で処理を繰り返すかを判断し、更に別な処理を行うかを判断し(S14)、装置の来歴データベースの更新を行う(S15)。
【0066】
図13は、ステップS4の装置状態監視を行うフローを示す。図において、装置状態監視(S21)を行う場合、監視設定パラメータ選択を行い(S22)、エラー発生時監視を中断するかを判断し、エラーストップ設定をONにして(S24)、監視情報を保存するかを判断し(S25)、監視情報保存設定をONにする(S26)。
【0067】
エラー発生時のエラーコードを監視情報に付加するかを判断し(S27)、エラーコード付加をONにして(S28)、ステップS29に移行して監視タイマー設定(0.05〜30秒)を行う(S29)。表示モードの選択を行うかを判断し(S30)、標準表示モード(S31),詳細モード(S32),センサ位置表示モード(S33)を選択する。選択されたモードによって装置状態監視を開始し(S34)、強制処理中断を実行するかを判断し(S35)、終了する。
【0068】
図14は、ステップS10の詳細フローを示す。図において、各種状態変化時間を測定するに当って(S41)、登録データベースから装置情報を読み込み(S42)、情報を選択するかを判断し(S43)、必要情報を選択し(S44)、選択した情報でタイミングチャートを生成する(S45)。また、全情報からタイミングチャートを生成し(S46)、カーソル矢印キーで目的の装置状態変化時間を測定し(S47)、他の装置状態変化時間を測定するかを判断し(S48)、戻るに至る。
【0069】
図15は、ステップS11の詳細フローを示す。図において、データ比較をするに当って(S51)、登録データベースから装置情報を読み込み(S52)、情報を選択するかを判断し(S53)、必要情報を選択し(S54)、選択した情報でタイミングチャートを生成する(S55)。また、全情報からタイミングチャートを生成し(S56)、比較するデータを選択し(S57)、オーバレイ矢印キーで2つのデータを比較する(S58)。2つのデータを比較して時間的変化量をカーソル矢印キーで測定し(S59)、他の装置状態変化についても比較するかを判断し(S60)、戻るに至る。
【0070】
以上のように、これらのステップによれば、
(1) 装置の状態を定期的に採取し装置状態データベースが構築される。
(2) 採取したデータは、データベースに登録したデータと比較することが可能。
(3) エラートラップ機能により装置に異常が発生した時の状態を再生することが可能。異常状態と正常時のデータを比較することにより、不具合原因の特定が飛躍的に向上する。
(4) 設計値の各センサON/OFFタイミングや機構系動作スピードをテンプレート化して、採取データと比較可能とする。また、テンプレート比較時に採取データとの差を自動的に算出し、予め設定した閾値を超えた場合にはデータベースに情報を保存する。この機能付加により定期保守や予防保全に対応する。
以上のことが可能になる。
【0071】
以上述べた構成によれば、次のようなシステムおよび方法が提供される。
【0072】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援システムにおいて、計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、装置の保守・診断を支援し、診断データを保存活用するシステムおよび方法。
【0073】
測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援システムを適用するシステムおよび方法。
【0074】
初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存するシステムおよび方法。
【0075】
計測装置の動作状態を遠隔装置で監視するか、差異検知タイミングを遠隔装置で警報するシステムおよび方法。
【0076】
真空中において加速電子線を応用する計測装置として、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計を用いるシステ
ムおよび方法。
【0077】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視するシステムおよび方法。
【図面の簡単な説明】
【0078】
【図1】本発明の実施例である測長システムの概略構成図。
【図2】測長システムの一部詳細構成図。
【図3】本発明の実施例のついてのブロック図。
【図4】データ処理状態図。
【図5】表示画面の一例を示す表示画面図。
【図6】排気系系統図の詳細を示す表示画面図。
【図7】チェック位置をまとめて示す一覧図。
【図8】タイムチャート図。
【図9】タイムチャート図。
【図10】タイムチャート図。
【図11】タイムチャート図。
【図12】フローチャート図。
【図13】フローチャート図。
【図14】フローチャート図。
【図15】フローチャート図。
【図16】テンプレート比較、判断図。
【符号の説明】
【0079】
10…大気搬送部、11…測長部、12…画像部、15…カセット、16…カセット台、17…搬送装置、18…搬送本体、19…ロードロック室、20…搬送室、21…測定室(試料室)、30…電子光学鏡体、31…試料台、32…試
料ステージ、68…搬送制御、69…真空制御、70…制御用CPU、71…データ処理用CPU、72…電子光学制御、73…画像処理、74…高電圧制御、75…ハードディスク、76…データ処理、77…画像表示処理、78…画面表示、79…画面表示、79…基本データ蓄積、監視データ蓄積、81…データ解析、分析、判定、100…測長システム、121…画面、122…排気系系統図、123…試料搬送系状態図、124…タイムチャート。
【特許請求の範囲】
【請求項1】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援の方法であって、前記計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、前記計測装置の保守・診断を支援することを特徴とする監視方法。
【請求項2】
前記計測装置は測長SEMであって、該測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援を行うことを特徴とする請求項1に記載の監視方法。
【請求項3】
前記計測装置の初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存することを特徴とする請求項1に記載の監視方法。
【請求項4】
前記計測装置の動作状態を遠隔装置で監視するとともに、差異検知タイミングを遠隔装置で警報することを特徴とする請求項1に記載の監視方法。
【請求項5】
前記計測装置は、真空中において加速電子線を応用する装置であって、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計のいずれかであることを特徴とする請求項1に記載の監視方法。
【請求項6】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視を行うことを特徴とする請求項1に記載の監視方法。
【請求項7】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援のためのシステムであって、前記計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存する記録手段と、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、原因を特定するCPUとを有することを特徴とする監視システム。
【請求項8】
前記計測装置は測長SEMであって、該測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援を行うことを特徴とする請求項7に記載の監視システム。
【請求項9】
前記CPUは、前記計測装置の初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存することを特徴とする請求項7に記載の監視システム。
【請求項10】
前記CPUは、前記計測装置の動作状態を遠隔装置で監視するとともに、差異検知タイミングを遠隔装置で警報することを特徴とする請求項7に記載の監視システム。
【請求項11】
前記計測装置は、真空中において加速電子線を応用する装置であって、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計のいずれかであることを特徴とする請求項7に記載の監視システム。
【請求項12】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視を行うことを特徴とする請求項7に記載の監視システム。
【請求項1】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援の方法であって、前記計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存し、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、さらに原因を特定するように構成し、前記計測装置の保守・診断を支援することを特徴とする監視方法。
【請求項2】
前記計測装置は測長SEMであって、該測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援を行うことを特徴とする請求項1に記載の監視方法。
【請求項3】
前記計測装置の初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存することを特徴とする請求項1に記載の監視方法。
【請求項4】
前記計測装置の動作状態を遠隔装置で監視するとともに、差異検知タイミングを遠隔装置で警報することを特徴とする請求項1に記載の監視方法。
【請求項5】
前記計測装置は、真空中において加速電子線を応用する装置であって、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計のいずれかであることを特徴とする請求項1に記載の監視方法。
【請求項6】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視を行うことを特徴とする請求項1に記載の監視方法。
【請求項7】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視・診断支援のためのシステムであって、前記計測装置の始動過程,計測過程における動作監視用センサからのデータをリアルタイムに同期的に記録保存する記録手段と、初期または正常時のデータと重ねてタイミングや動作レベルを比較再生し、保守を要するかまたは不具合と診断すべき差異をデータ上に検知したとき、予め蓄積しておいた異常とその対策に関する選択肢項目の中から可能性のある不具合原因項目を選出するとともに、さらに不具合原因を特定するために予め用意しておいた確認事項を実施した結果を入力し、原因を特定するCPUとを有することを特徴とする監視システム。
【請求項8】
前記計測装置は測長SEMであって、該測長SEMの電子レンズ・ウェーハ駆動部・給排気部に位置・真空度センサを設けて、保守および不具合の監視・診断支援を行うことを特徴とする請求項7に記載の監視システム。
【請求項9】
前記CPUは、前記計測装置の初期または正常時の装置動作データとリアルタイムに比較し、保守または不具合と診断すべき差異を検知したとき、これを保存することを特徴とする請求項7に記載の監視システム。
【請求項10】
前記CPUは、前記計測装置の動作状態を遠隔装置で監視するとともに、差異検知タイミングを遠隔装置で警報することを特徴とする請求項7に記載の監視システム。
【請求項11】
前記計測装置は、真空中において加速電子線を応用する装置であって、測長SEM(走査形電子顕微鏡)・SEM・TEM(透過形電子顕微鏡)・質量分析計のいずれかであることを特徴とする請求項7に記載の監視システム。
【請求項12】
真空中において加速電子線を応用する計測装置に関する保守および不具合の監視を行うことを特徴とする請求項7に記載の監視システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2006−108086(P2006−108086A)
【公開日】平成18年4月20日(2006.4.20)
【国際特許分類】
【出願番号】特願2005−273103(P2005−273103)
【出願日】平成17年9月21日(2005.9.21)
【分割の表示】特願2001−303484(P2001−303484)の分割
【原出願日】平成13年9月28日(2001.9.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成18年4月20日(2006.4.20)
【国際特許分類】
【出願日】平成17年9月21日(2005.9.21)
【分割の表示】特願2001−303484(P2001−303484)の分割
【原出願日】平成13年9月28日(2001.9.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]