
目標位置到達判定装置及びその判定方法、目標位置到達判定システム
【課題】
本発明は、車両で検出する目標位置の検出誤差があっても、車両の目標位置到達を精度良く検出できるようにすることにある。
【解決手段】
車両管理センター側で予め任意に設定した目標到達条件情報の各データを、無線通信網Nで連結する目標位置到達判定装置1の記憶部4に格納し、目標位置到達判定装置1内に車両の現在位置を検出する位置検出部5と、車両の停車状態情報を検出する車両状態検出部6設けている。位置検出部5で検出する現在位置や目標到達条件情報の目標位置と設定到達領域よりから車両が目標位置を含む設定到達領域内にあると判定したとき、前記目標到達条件情報中の目的地完了条件と当該車両から取込む停車状態情報とを比較し、当該車両の停車状態を判断した時点で目標位置に到達と判定し、車両管理センター側に目標位置到達を通報するものである。
本発明は、車両で検出する目標位置の検出誤差があっても、車両の目標位置到達を精度良く検出できるようにすることにある。
【解決手段】
車両管理センター側で予め任意に設定した目標到達条件情報の各データを、無線通信網Nで連結する目標位置到達判定装置1の記憶部4に格納し、目標位置到達判定装置1内に車両の現在位置を検出する位置検出部5と、車両の停車状態情報を検出する車両状態検出部6設けている。位置検出部5で検出する現在位置や目標到達条件情報の目標位置と設定到達領域よりから車両が目標位置を含む設定到達領域内にあると判定したとき、前記目標到達条件情報中の目的地完了条件と当該車両から取込む停車状態情報とを比較し、当該車両の停車状態を判断した時点で目標位置に到達と判定し、車両管理センター側に目標位置到達を通報するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動態管理を行う車両が行先の目標位置に到達したことを検出し、車両管理センター内の車両管理装置に通報を行う車両に搭載する目標位置到達判定装置及びその判定方法、目標位置到達判定システムに関する。
【背景技術】
【0002】
一般に、車両管理センターには車両管理装置を設置し、管理対象の各車両に搭載する車載端末とを無線通信網で結び、多数の車両の動態管理を行うようにしている。各車両の動態管理は、車両管理センターに設けた表示装置に表示する地図上に、実動の走行中の各車両を表示して管理している。車両管理センター内の車両管理装置は、通信によって各車両毎に、行先目標位置を車両のID番号(Identification Number)と共に指定するようにしている。
【0003】
車両は、例えば支所の駐車場で待機しているとき、車両管理センター内の車両管理装置から稼動指令を受け、行先目標位置を指定されるとエンジンを始動して実走行を開始することになる。通常、車両のエンジンキーを操作して出発し、走行を開始するとすると、この車両情報が車両管理センター内の車両管理装置)に通報され、車両自体は位置を測定するため、よく知られているようにGPS(Grobal Positioning System)信号を位置検出手段に受信して自己の位置の検出を行っている。
【0004】
車両が先に指定された目標位置に達して業務を終了すると、車両管理センター内の車両管理装置から、次の行先目標位置として車両が通常待機している支所の駐車場が指定される。車両は、支所の駐車場を目標位置として走行して戻り、支所の駐車場に到達すると目標位置到達を車両管理センター側に通報する。車両管理センター内の車両管理装置は、車両が待機位置に到達を確認すると、管理者がその車両を表示装置から消去して管理を中止することになる。
【0005】
車両が指定された目標位置に達したかどうかを判断に利用するため、例えば特許文献1に記載されている車両用経路誘導装置では、目的の場所に対して所定距離以内に近接したかどうかの判定により、目的地に達したとみなすことが提案されている。また、特許文献2には、車両管理センター側と車両に搭載した車両位置判定装置とを無線通信網で連結するとき、車両管理センター側から目的位置を中心とする任意の大きさの到達領域を車両側の判定装置に指定することにより、指定された到達領域に車両が入ると到達と判定し、車両管理センター側に位置検出誤差があっても目標位置に到達したかどうかを判定できる車両位置判定装置が提案されている。
【0006】
【特許文献1】特開平6−66576号公報
【特許文献2】特開2004−118398号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1や特許文献2に記載の装置では、車両が位置検出手段でGPS信号を受信して自車の位置を検出し、一定或いは可変に設定した到達領域に車両が到達すると、車両管理センター内の車両管理装置に目標位置到達したと判定するものである。
【0008】
それ故、設定の到達領域に到達することのみで判定する場合は、設定した到達領域の一部を通過、即ち到達領域を掠め目標地点に行かない道路を走行している目標位置未到達の状態でも、車両が目標位置に到達したと判断され、車両管理センター内側に目標位置到達を誤って通報することになる。したがって、位置情報のみでは車両管理センター側で車両の正確な車両管理を行えないという問題がある。
【0009】
本発明の目的は、設定した到達領域の一部を通過しただけで目標位置に到達と誤判定することがなく、車両の目標位置到達を精度良く検出できる目標位置到達判定装置及び目標位置到達判定システムを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、車両管理センター側と車両に搭載する目標位置到達判定装置とを無線通信網で連結し、位置検出部を有して前記車両管理センターが任意に指定する設定到達領域に車両が入ったとき目標位置に到達したと判定すると共に、判定結果を前記車両管理センターに通報する目標位置到達判定装置であって、指定された目標位置データ及び設定到達領域データを格納する記憶部と、前記記憶部から取込む目標位置の設定到達領域及び目標位置と前記位置検出部で検出した車両位置の位置差を基に目標位置への到達判定を行う到達判定部を有する目標位置到達検知部を備えて目標位置到達判定装置を構成する際に、この目標位置到達判定装置内に車両の状態を検出する車両状態検出部を備え、記憶部内には車両管理センター側から予め指定する目標値到達条件情報となる車両停止状態の条件データを格納しており、目標位置到達検知部は、車両が目標位置を含む設定到達領域内にあるとき、前記記憶部から取込む目標到達完了条件データと前記車両状態検出部から取込む停車状態情報とから、目標到達を判定するようにしたものである。
【0011】
また本発明では、車両管理センター側の車両管理装置と、車両に搭載する請求項1記載の目標位置到達判定装置とを無線通信網で連結して送受信を行う目標位置到達判定システムを構成する際、車両管理装置内には、前記目標到達条件を予め任意に設定する目標到達条件入力部と、前記目標到達条件の情報を確認するためのデータ表示部と、前記目標到達条件情報を記憶する車両管理装置側の記憶部と、前記目標位置到達判定装置の通信処理部との間で信号の送受信を行う車両管理装置側の通信処理部とを有して構成するようにしたものである。
【発明の効果】
【0012】
本発明の目標位置到達判定装置及び判定方法によれば、車両が目標位置を含む設定到達領域内にあるときに、予め定めた目的地到達条件と車両状態検出部からの停車状態情報の検出信号を加味し、目標位置への到達判定を行うため、車両の位置検出誤差や設定到達領域の一部を通過しただけでの判定と異なり、目標位置到達を精度良く的確に判定して検出することができる。
【0013】
また、本発明のように目標位置到達判定システムを構成すれば、車両管理センター側の車両管理装置において目標到達条件を予め任意に設定し、この目標到達条件を管理対象の車両に搭載した目標位置到達判定装置に保存するので、車両の位置検出誤差があっても精度の良い目標到達判定に効果的に利用できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を実施するための最良の形態を具体的な実施例によって説明する。
【実施例1】
【0015】
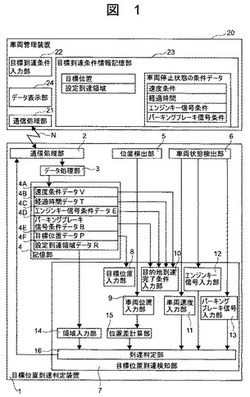
本発明の一実施例を図1に示しており、よく知れている如く車両管理センター内の車両管理装置20と車両に搭載する目標位置到達判定装置1とは、無線通信網Nにて連結している。車両管理装置20は、実動して走行中の管理対象となっている複数の車両を、データ表示部24に表示して動態管理するもので、このデータ表示部24に表示する道路地図上に各車両が位置に応じて表示する。
【0016】
車両管理センター内の車両管理装置20は、後述する管理対象の車両毎の目標到達条件情報を入力する目標到達条件入力部22と、予め設定した目標到達条件情報である目標位置、設定到達領域の他、車両停止状態の条件データである速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を保存する目標到達条件情報記憶部23と、各目標到達条件情報も表示するデータ表示部24と、車両毎に搭載する目標位置到達判定装置1に無線通信網Nを介して送信する通信処理部21を備えている。車両管理装置20で予め任意に設定する目標到達条件は、例えば目標位置の場所状況、時間帯、位置検出手段の検出精度等によって設定到達領域の大きさ、停車状態を判定するための速度条件と経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を適宜変更して使用する。
【0017】
また、車載の目標位置到達判定装置1は、公知の装置と同様に車両管理装置20から送信された情報データを受信する通信処理部2と、目標到達条件情報を判断して記憶部に保存するデータを処理するデータ処理部3、GPS信号を受信し、必要に応じてジャイロや車速パルスを組合せて自己の位置を検出する位置検出部5を備えている。車両管理センター側から受信する予め指定された目標到達条件情報の各データは、記憶部4の各記憶エリア4Aから4Fに、順次速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、目標位置データP、設定到達領域データRを格納する。
【0018】
更に、目標位置到達判定装置1内には、車両の目標位置到達を検知するための目標位置到達検知部7が設けている。この目標位置到達検知部7には、記憶部4内の設定領域データRを取込む領域入力部14、及び記憶部4内の目標位置データPを取込む目標位置入力部8と、位置検出部5で検出した位置データを取込む車両位置入力部9とを設けており、位置差計算部15において目標位置データPと検出した位置データから、位置差の絶対値の計算を行うようにしている。領域入力部14及び位置差計算部15のデータは、公知のものと同様に到達判定部16に入力され、目標到達の判定に用いている。
【0019】
本発明の目標位置到達判定装置1では、車両の状態を逐次検出する車両状態検出部6を設けており、これによって稼動中の車両の車両速度やエンジンキー信号やパーキングブレーキ信号を停車状態情報として逐次検出し、記憶部4内の目標地到達完了条件と比較し、車両の停車状態の条件判定に使用するものである。これらの各データは、車両速度入力部10、エンジンキー入力部12、パーキングブレーキ信号入力部13を介して到達判定部16へ入力するようにしており、この車両の停車状態情報の各データを目標地点への到達の判定に活用する。
【0020】
また本発明では、目標位置到達検知部7での目標位置判定をより正確に行えるようにするため、目的地到達条件入力部10を設けている。この目的地到達条件入力部10から、記憶部4内に保存された速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、目標位置データP、設定到達領域データRを到達判定部16に取込み、これら目的地到達条件データも目標地点への到達の判定に活用する。設定到達領域は、公知のように目標位置を中心とする例えば円形であって、円形の場合は半径データで指令され、また停車状態を判定するための速度条件は、速度条件データとそれを持続する経過時間データで行うようにしている。
【0021】
車両管理装置20で設定する目標到達条件情報、即ち目標位置、設定到達領域、停車状態を判定するための速度と経過時間である速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件などは、管理する車両毎に任意に設定し、車両に搭載している目標位置到達判定装置1に送信し、車両の到達判定に活用する。エンジンキー信号条件は、エンジンキー信号を停車状態の判定に使用するか否かを指定するもので、真偽値データとして指令され、またパーキングブレーキ信号条件は、パーキングブレーキ信号を停車状態の判定に使用するか否かを指定するもので真偽値データとして指令される。
【0022】
到達判定部16では、位置差計算部15で算出した目標位置データPと現在位置との位置差の絶対値が設定到達領域データRより小さい場合に、設定到達領域内であると判断する。設定到達領域内であると判断され、かつ車両状態検出部6で検出した停車状態情報である車両速度が、記憶部4の記憶エリア4Aに格納した速度条件データVで指定される車両速度以下で、しかも記憶部4の記憶エリア4Bに格納した経過時間データで指定される時間Tを経過した場合、目標位置に到達したと判断する。判断結果は、目標位置到達判定装置1の通信処理部2を介して車両管理センターの車両管理装置20に通報する。
【0023】
なお、本発明では上記のように設定到達領域内であると判断され、かつ車両状態検出部6で検出した停車状態情報である車両速度が速度条件データで指定される車両速度V以下で記憶部4の記憶エリア4Bに格納されている経過時間データで指定される時間Tを経過していない場合であっても、次の条件を満たすときは目標位置に到達したと判定する。即ち、記憶エリア4Cに格納したエンジンキー信号条件データEと車両状態検出部6で検出した停車状態情報であるエンジンキー信号が共に真である場合、又は記憶エリア4Dに格納したパーキングブレーキ信号条件データBと車両状態検出部6で検出した停車状態情報であるパーキングブレーキ信号が共に真である場合は、目標位置に到達したと判定する。
【0024】
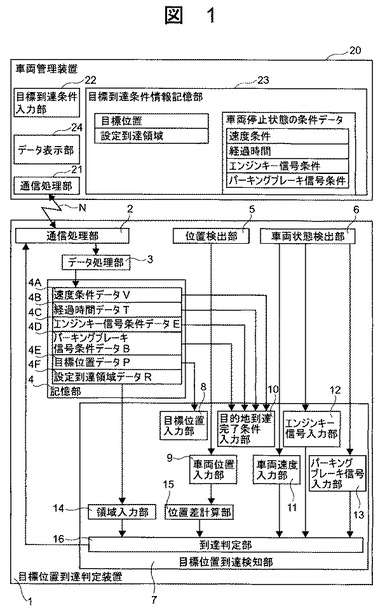
本発明の目標位置到達判定装置1を用い、目標位置到達を検出する場合を図2に示しており、目標位置が点P、この目標位置Pを中心とする半径Rの円形領域PAが設定到達領域である。車両は、道路S1上の点P1から点P2、P3、P4、P5を通り目標位置の点P点へ向かうものとする。点P1から点Pの各地点の時間間隔は、停車状態を判定するための速度条件経過時間と一致するものとし、各点間の車両の最高速度をそれぞれV1、V2、V3、V4、V5とする。停車状態を判定するための速度条件の速度条件データVと各点での最高速度V1、V2、V3、V4、V5には、V5<V<V1、V2、V3、V4の関係が成立するものとする。
【0025】
車両の目標位置到達を、設定到達領域に車両が到達することのみで判定する公知の判定では、車両が設定到達領域PAに進入する点P2と点P3の間で目標位置到達と判断し、車両管理センター内の車両管理装置へ目標位置到達が通報される。しかし実際には、車両はその後点P3、P4、P5を通り目的地到達位置の点Pへ向かうため、通報される時刻と真の目的地に到達する時刻には誤差が生じる。本発明では、設定到達領域PAに加え、車両停止状態を判定するための速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を、目的地到達条件に加味しているため、速度条件を満さない点P2と点P3の間では、車両管理センター内の車両管理装置へ目標位置到達を通報せず、より目標位置の点Pに近い点P5と点Pの間で条件を満たし場合に、目標位置到達を判定して通報することができる。また、仮に点P5と点Pの間で停車状態を判定するための速度条件を満たさずに、目的地の点Pに到達した場合であっても、エンジンキー信号、パーキングブレーキ信号条件を用いて、車両の停車状態を判断する。したがって、車両の目標位置到達を精度良く検出することができ、設定到達領域内での渋滞などの道路状況の影響を受けることもなく検出できる。
【0026】
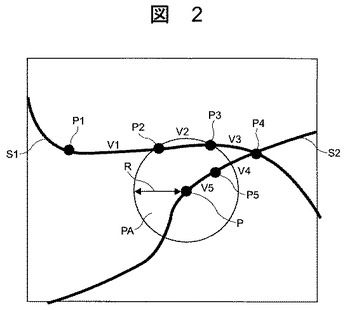
目標位置到達検知部7での検知処理の手順を、図3を用いて説明する。まずステップS22において、位置検出部5で検出した車両位置を車両位置入力部9が取込み、位置差計算部15に入力する。ステップS23では、目標位置入力部8が記憶部4の記憶エリア4Dに格納されている目標位置データPを取込み、位置差計算部15に入力すると共に、領域入力部14が記憶部4の記憶エリア4Eに格納されている設定到達領域データRを取込んで到達判定部16に入力する。
【0027】
次に、ステップS24で、目標位置と車両位置の位置差の絶対値を位置差計算部15で求め到達判定部16に加える。ステップS25では、位置差計算部15で求めた目標位置Pと現在位置の位置差の絶対値が領域半径データRより小さい場合、到達判定部16において目標位置領域内と判定する。続いてステップS26において、車両速度入力部11、エンジンキー信号入力部12、パーキングブレーキ信号入力部13は車両状態検出部6で検出した停車状態情報である車両速度、エンジンキー信号、パーキングブレーキ信号を取り込み到達判定部16に入力する。ステップS27では、目的地到達完了条件入力部10が記憶部4の記憶エリア4A、4B、4C、4Dに格納されている速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データBを取込み、到達判定部16に入力する。
【0028】
ステップS28では、車両状態検出部6で検出した停車状態情報である車両速度が、記憶部4の記憶エリア4Aに格納されている速度条件データで指定される車両速度V以下で、しかも記憶部4の記憶エリア4Bに格納されている経過時間データで指定される時間Tを経過した場合、停車条件を満たし目標位置に到達したと判定し、通信処理部2を介して車両管理センター内の車両管理装置20に通報する。ステップS29では、車両状態検出部6で検出した停車状態情報であるエンジンキー信号が、記憶部4の記憶エリア4Cに格納されているエンジンキー信号条件データEと共に真である場合、停車条件を満たし目標位置に到達したと判定し、通信処理部2を介して車両管理センター内の車両管理装置20に通報する。ステップS30では、車両状態検出部6で検出した停車状態情報であるパーキングブレーキ信号が、記憶部4の記憶エリア4Dに格納されているパーキングブレーキ信号条件データBと共に真である場合、停車条件を満たし目標位置に到達したと判定し、同様に通信処理部2を介して車両管理センター内の車両管理装置20に通報する。この各ステップS28、29、30で示した判定条件は一例であり、判定順序や判定の組合せは自由に設定することが可能である。
【0029】
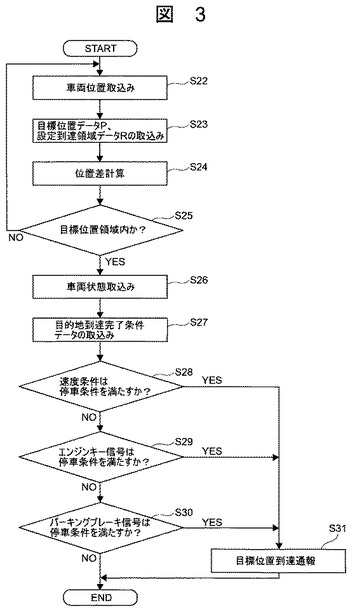
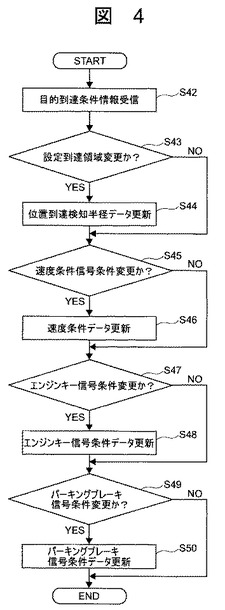
目標位置到達検知の条件変更処理のフローを、図4に示している。この図4では、設定到達領域、停車状態を判定するための速度と経過時間の速度条件、エンジンキー信号条件、パーキングブレーキ信号条件の変更を行う際の通信処理部2とデータ処理部3の処理フローを示したものである。
【0030】
車両管理センター内の車両管理装置20から送信された目標到達条件情報である目標位置、設定到達領域、停車状態を判定するための速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件などは、ステップS42で目標位置到達判定装置1の通信処理部2で受信され、データ処理部3に入力される。車両管理センター内の車両管理装置20からは、設定到達領域、停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件が変更される場合だけ送信される。データ処理部3では、ステップS43、S45、S47、S49において、順に目標到達条件情報に設定到達領域ありか、停車状態を判定するための速度条件ありか、エンジンキー信号条件ありか、パーキングブレーキ信号条件ありかを判定する。
【0031】
データ処理部3は、ステップS43、S45、S47、S49で設定到達領域、停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件に変更がなければ、処理を終了する。しかし、設定到達領域があり、停車状態を判定するための速度条件があり、エンジンキー信号条件があり、パーキングブレーキ信号条件がありの場合には、それぞれステップS44、S46、S48、S50に移行し、記憶部4の記憶エリア4A、4B、4C、4D、4Fに格納されている速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、設定到達領域データRを更新する。
【0032】
このようにして車両の目標位置への到達を検出するが、車両管理センター内の車両管理装置で、目標位置を中心とする設定到達領域の大きさや停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件を可変とし、管理対象の車両に指定するので、目標位置到達検知を精度良く行うことができる。
【0033】
上述の実施例では設定到達領域を円形にしているが、この設定到達領域は従来と同様に多角形等の他の形状としても良く、このようにしても支障なく検出することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施例の目標位置到達判定システムを示す構成図である。
【図2】本発明における目標位置到達の判定の説明図である。
【図3】本発明の目標位置到達判定装置における目標位置到達の検知処理のフロー図である。
【図4】本発明における目標位置到達の判断に使用する目標到達条件情報のデータ変更処理のフロー図である。
【符号の説明】
【0035】
1…目標位置到達判定装置、2、21…通信処理部、3…データ処理部、4…記憶部、5…位置検出部、6…車両状態検出部、7…目標位置到達検知部、8…目標位置入力部、9…車両位置入力部、10…目的地到達完了条件入力部、11…車両速度入力部、12…エンジンキー信号入力部、13…パーキングブレーキ信号入力部、14…領域入力部、15…位置差計算部、16…到達判定部、20…車両管理装置、21…通信処理部、22…目標到達条件入力部、23…目標到達条件情報記憶部、24…データ表示部、N…無線通信網。
【技術分野】
【0001】
本発明は、動態管理を行う車両が行先の目標位置に到達したことを検出し、車両管理センター内の車両管理装置に通報を行う車両に搭載する目標位置到達判定装置及びその判定方法、目標位置到達判定システムに関する。
【背景技術】
【0002】
一般に、車両管理センターには車両管理装置を設置し、管理対象の各車両に搭載する車載端末とを無線通信網で結び、多数の車両の動態管理を行うようにしている。各車両の動態管理は、車両管理センターに設けた表示装置に表示する地図上に、実動の走行中の各車両を表示して管理している。車両管理センター内の車両管理装置は、通信によって各車両毎に、行先目標位置を車両のID番号(Identification Number)と共に指定するようにしている。
【0003】
車両は、例えば支所の駐車場で待機しているとき、車両管理センター内の車両管理装置から稼動指令を受け、行先目標位置を指定されるとエンジンを始動して実走行を開始することになる。通常、車両のエンジンキーを操作して出発し、走行を開始するとすると、この車両情報が車両管理センター内の車両管理装置)に通報され、車両自体は位置を測定するため、よく知られているようにGPS(Grobal Positioning System)信号を位置検出手段に受信して自己の位置の検出を行っている。
【0004】
車両が先に指定された目標位置に達して業務を終了すると、車両管理センター内の車両管理装置から、次の行先目標位置として車両が通常待機している支所の駐車場が指定される。車両は、支所の駐車場を目標位置として走行して戻り、支所の駐車場に到達すると目標位置到達を車両管理センター側に通報する。車両管理センター内の車両管理装置は、車両が待機位置に到達を確認すると、管理者がその車両を表示装置から消去して管理を中止することになる。
【0005】
車両が指定された目標位置に達したかどうかを判断に利用するため、例えば特許文献1に記載されている車両用経路誘導装置では、目的の場所に対して所定距離以内に近接したかどうかの判定により、目的地に達したとみなすことが提案されている。また、特許文献2には、車両管理センター側と車両に搭載した車両位置判定装置とを無線通信網で連結するとき、車両管理センター側から目的位置を中心とする任意の大きさの到達領域を車両側の判定装置に指定することにより、指定された到達領域に車両が入ると到達と判定し、車両管理センター側に位置検出誤差があっても目標位置に到達したかどうかを判定できる車両位置判定装置が提案されている。
【0006】
【特許文献1】特開平6−66576号公報
【特許文献2】特開2004−118398号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1や特許文献2に記載の装置では、車両が位置検出手段でGPS信号を受信して自車の位置を検出し、一定或いは可変に設定した到達領域に車両が到達すると、車両管理センター内の車両管理装置に目標位置到達したと判定するものである。
【0008】
それ故、設定の到達領域に到達することのみで判定する場合は、設定した到達領域の一部を通過、即ち到達領域を掠め目標地点に行かない道路を走行している目標位置未到達の状態でも、車両が目標位置に到達したと判断され、車両管理センター内側に目標位置到達を誤って通報することになる。したがって、位置情報のみでは車両管理センター側で車両の正確な車両管理を行えないという問題がある。
【0009】
本発明の目的は、設定した到達領域の一部を通過しただけで目標位置に到達と誤判定することがなく、車両の目標位置到達を精度良く検出できる目標位置到達判定装置及び目標位置到達判定システムを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、車両管理センター側と車両に搭載する目標位置到達判定装置とを無線通信網で連結し、位置検出部を有して前記車両管理センターが任意に指定する設定到達領域に車両が入ったとき目標位置に到達したと判定すると共に、判定結果を前記車両管理センターに通報する目標位置到達判定装置であって、指定された目標位置データ及び設定到達領域データを格納する記憶部と、前記記憶部から取込む目標位置の設定到達領域及び目標位置と前記位置検出部で検出した車両位置の位置差を基に目標位置への到達判定を行う到達判定部を有する目標位置到達検知部を備えて目標位置到達判定装置を構成する際に、この目標位置到達判定装置内に車両の状態を検出する車両状態検出部を備え、記憶部内には車両管理センター側から予め指定する目標値到達条件情報となる車両停止状態の条件データを格納しており、目標位置到達検知部は、車両が目標位置を含む設定到達領域内にあるとき、前記記憶部から取込む目標到達完了条件データと前記車両状態検出部から取込む停車状態情報とから、目標到達を判定するようにしたものである。
【0011】
また本発明では、車両管理センター側の車両管理装置と、車両に搭載する請求項1記載の目標位置到達判定装置とを無線通信網で連結して送受信を行う目標位置到達判定システムを構成する際、車両管理装置内には、前記目標到達条件を予め任意に設定する目標到達条件入力部と、前記目標到達条件の情報を確認するためのデータ表示部と、前記目標到達条件情報を記憶する車両管理装置側の記憶部と、前記目標位置到達判定装置の通信処理部との間で信号の送受信を行う車両管理装置側の通信処理部とを有して構成するようにしたものである。
【発明の効果】
【0012】
本発明の目標位置到達判定装置及び判定方法によれば、車両が目標位置を含む設定到達領域内にあるときに、予め定めた目的地到達条件と車両状態検出部からの停車状態情報の検出信号を加味し、目標位置への到達判定を行うため、車両の位置検出誤差や設定到達領域の一部を通過しただけでの判定と異なり、目標位置到達を精度良く的確に判定して検出することができる。
【0013】
また、本発明のように目標位置到達判定システムを構成すれば、車両管理センター側の車両管理装置において目標到達条件を予め任意に設定し、この目標到達条件を管理対象の車両に搭載した目標位置到達判定装置に保存するので、車両の位置検出誤差があっても精度の良い目標到達判定に効果的に利用できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を実施するための最良の形態を具体的な実施例によって説明する。
【実施例1】
【0015】
本発明の一実施例を図1に示しており、よく知れている如く車両管理センター内の車両管理装置20と車両に搭載する目標位置到達判定装置1とは、無線通信網Nにて連結している。車両管理装置20は、実動して走行中の管理対象となっている複数の車両を、データ表示部24に表示して動態管理するもので、このデータ表示部24に表示する道路地図上に各車両が位置に応じて表示する。
【0016】
車両管理センター内の車両管理装置20は、後述する管理対象の車両毎の目標到達条件情報を入力する目標到達条件入力部22と、予め設定した目標到達条件情報である目標位置、設定到達領域の他、車両停止状態の条件データである速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を保存する目標到達条件情報記憶部23と、各目標到達条件情報も表示するデータ表示部24と、車両毎に搭載する目標位置到達判定装置1に無線通信網Nを介して送信する通信処理部21を備えている。車両管理装置20で予め任意に設定する目標到達条件は、例えば目標位置の場所状況、時間帯、位置検出手段の検出精度等によって設定到達領域の大きさ、停車状態を判定するための速度条件と経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を適宜変更して使用する。
【0017】
また、車載の目標位置到達判定装置1は、公知の装置と同様に車両管理装置20から送信された情報データを受信する通信処理部2と、目標到達条件情報を判断して記憶部に保存するデータを処理するデータ処理部3、GPS信号を受信し、必要に応じてジャイロや車速パルスを組合せて自己の位置を検出する位置検出部5を備えている。車両管理センター側から受信する予め指定された目標到達条件情報の各データは、記憶部4の各記憶エリア4Aから4Fに、順次速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、目標位置データP、設定到達領域データRを格納する。
【0018】
更に、目標位置到達判定装置1内には、車両の目標位置到達を検知するための目標位置到達検知部7が設けている。この目標位置到達検知部7には、記憶部4内の設定領域データRを取込む領域入力部14、及び記憶部4内の目標位置データPを取込む目標位置入力部8と、位置検出部5で検出した位置データを取込む車両位置入力部9とを設けており、位置差計算部15において目標位置データPと検出した位置データから、位置差の絶対値の計算を行うようにしている。領域入力部14及び位置差計算部15のデータは、公知のものと同様に到達判定部16に入力され、目標到達の判定に用いている。
【0019】
本発明の目標位置到達判定装置1では、車両の状態を逐次検出する車両状態検出部6を設けており、これによって稼動中の車両の車両速度やエンジンキー信号やパーキングブレーキ信号を停車状態情報として逐次検出し、記憶部4内の目標地到達完了条件と比較し、車両の停車状態の条件判定に使用するものである。これらの各データは、車両速度入力部10、エンジンキー入力部12、パーキングブレーキ信号入力部13を介して到達判定部16へ入力するようにしており、この車両の停車状態情報の各データを目標地点への到達の判定に活用する。
【0020】
また本発明では、目標位置到達検知部7での目標位置判定をより正確に行えるようにするため、目的地到達条件入力部10を設けている。この目的地到達条件入力部10から、記憶部4内に保存された速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、目標位置データP、設定到達領域データRを到達判定部16に取込み、これら目的地到達条件データも目標地点への到達の判定に活用する。設定到達領域は、公知のように目標位置を中心とする例えば円形であって、円形の場合は半径データで指令され、また停車状態を判定するための速度条件は、速度条件データとそれを持続する経過時間データで行うようにしている。
【0021】
車両管理装置20で設定する目標到達条件情報、即ち目標位置、設定到達領域、停車状態を判定するための速度と経過時間である速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件などは、管理する車両毎に任意に設定し、車両に搭載している目標位置到達判定装置1に送信し、車両の到達判定に活用する。エンジンキー信号条件は、エンジンキー信号を停車状態の判定に使用するか否かを指定するもので、真偽値データとして指令され、またパーキングブレーキ信号条件は、パーキングブレーキ信号を停車状態の判定に使用するか否かを指定するもので真偽値データとして指令される。
【0022】
到達判定部16では、位置差計算部15で算出した目標位置データPと現在位置との位置差の絶対値が設定到達領域データRより小さい場合に、設定到達領域内であると判断する。設定到達領域内であると判断され、かつ車両状態検出部6で検出した停車状態情報である車両速度が、記憶部4の記憶エリア4Aに格納した速度条件データVで指定される車両速度以下で、しかも記憶部4の記憶エリア4Bに格納した経過時間データで指定される時間Tを経過した場合、目標位置に到達したと判断する。判断結果は、目標位置到達判定装置1の通信処理部2を介して車両管理センターの車両管理装置20に通報する。
【0023】
なお、本発明では上記のように設定到達領域内であると判断され、かつ車両状態検出部6で検出した停車状態情報である車両速度が速度条件データで指定される車両速度V以下で記憶部4の記憶エリア4Bに格納されている経過時間データで指定される時間Tを経過していない場合であっても、次の条件を満たすときは目標位置に到達したと判定する。即ち、記憶エリア4Cに格納したエンジンキー信号条件データEと車両状態検出部6で検出した停車状態情報であるエンジンキー信号が共に真である場合、又は記憶エリア4Dに格納したパーキングブレーキ信号条件データBと車両状態検出部6で検出した停車状態情報であるパーキングブレーキ信号が共に真である場合は、目標位置に到達したと判定する。
【0024】
本発明の目標位置到達判定装置1を用い、目標位置到達を検出する場合を図2に示しており、目標位置が点P、この目標位置Pを中心とする半径Rの円形領域PAが設定到達領域である。車両は、道路S1上の点P1から点P2、P3、P4、P5を通り目標位置の点P点へ向かうものとする。点P1から点Pの各地点の時間間隔は、停車状態を判定するための速度条件経過時間と一致するものとし、各点間の車両の最高速度をそれぞれV1、V2、V3、V4、V5とする。停車状態を判定するための速度条件の速度条件データVと各点での最高速度V1、V2、V3、V4、V5には、V5<V<V1、V2、V3、V4の関係が成立するものとする。
【0025】
車両の目標位置到達を、設定到達領域に車両が到達することのみで判定する公知の判定では、車両が設定到達領域PAに進入する点P2と点P3の間で目標位置到達と判断し、車両管理センター内の車両管理装置へ目標位置到達が通報される。しかし実際には、車両はその後点P3、P4、P5を通り目的地到達位置の点Pへ向かうため、通報される時刻と真の目的地に到達する時刻には誤差が生じる。本発明では、設定到達領域PAに加え、車両停止状態を判定するための速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件を、目的地到達条件に加味しているため、速度条件を満さない点P2と点P3の間では、車両管理センター内の車両管理装置へ目標位置到達を通報せず、より目標位置の点Pに近い点P5と点Pの間で条件を満たし場合に、目標位置到達を判定して通報することができる。また、仮に点P5と点Pの間で停車状態を判定するための速度条件を満たさずに、目的地の点Pに到達した場合であっても、エンジンキー信号、パーキングブレーキ信号条件を用いて、車両の停車状態を判断する。したがって、車両の目標位置到達を精度良く検出することができ、設定到達領域内での渋滞などの道路状況の影響を受けることもなく検出できる。
【0026】
目標位置到達検知部7での検知処理の手順を、図3を用いて説明する。まずステップS22において、位置検出部5で検出した車両位置を車両位置入力部9が取込み、位置差計算部15に入力する。ステップS23では、目標位置入力部8が記憶部4の記憶エリア4Dに格納されている目標位置データPを取込み、位置差計算部15に入力すると共に、領域入力部14が記憶部4の記憶エリア4Eに格納されている設定到達領域データRを取込んで到達判定部16に入力する。
【0027】
次に、ステップS24で、目標位置と車両位置の位置差の絶対値を位置差計算部15で求め到達判定部16に加える。ステップS25では、位置差計算部15で求めた目標位置Pと現在位置の位置差の絶対値が領域半径データRより小さい場合、到達判定部16において目標位置領域内と判定する。続いてステップS26において、車両速度入力部11、エンジンキー信号入力部12、パーキングブレーキ信号入力部13は車両状態検出部6で検出した停車状態情報である車両速度、エンジンキー信号、パーキングブレーキ信号を取り込み到達判定部16に入力する。ステップS27では、目的地到達完了条件入力部10が記憶部4の記憶エリア4A、4B、4C、4Dに格納されている速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データBを取込み、到達判定部16に入力する。
【0028】
ステップS28では、車両状態検出部6で検出した停車状態情報である車両速度が、記憶部4の記憶エリア4Aに格納されている速度条件データで指定される車両速度V以下で、しかも記憶部4の記憶エリア4Bに格納されている経過時間データで指定される時間Tを経過した場合、停車条件を満たし目標位置に到達したと判定し、通信処理部2を介して車両管理センター内の車両管理装置20に通報する。ステップS29では、車両状態検出部6で検出した停車状態情報であるエンジンキー信号が、記憶部4の記憶エリア4Cに格納されているエンジンキー信号条件データEと共に真である場合、停車条件を満たし目標位置に到達したと判定し、通信処理部2を介して車両管理センター内の車両管理装置20に通報する。ステップS30では、車両状態検出部6で検出した停車状態情報であるパーキングブレーキ信号が、記憶部4の記憶エリア4Dに格納されているパーキングブレーキ信号条件データBと共に真である場合、停車条件を満たし目標位置に到達したと判定し、同様に通信処理部2を介して車両管理センター内の車両管理装置20に通報する。この各ステップS28、29、30で示した判定条件は一例であり、判定順序や判定の組合せは自由に設定することが可能である。
【0029】
目標位置到達検知の条件変更処理のフローを、図4に示している。この図4では、設定到達領域、停車状態を判定するための速度と経過時間の速度条件、エンジンキー信号条件、パーキングブレーキ信号条件の変更を行う際の通信処理部2とデータ処理部3の処理フローを示したものである。
【0030】
車両管理センター内の車両管理装置20から送信された目標到達条件情報である目標位置、設定到達領域、停車状態を判定するための速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件などは、ステップS42で目標位置到達判定装置1の通信処理部2で受信され、データ処理部3に入力される。車両管理センター内の車両管理装置20からは、設定到達領域、停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件が変更される場合だけ送信される。データ処理部3では、ステップS43、S45、S47、S49において、順に目標到達条件情報に設定到達領域ありか、停車状態を判定するための速度条件ありか、エンジンキー信号条件ありか、パーキングブレーキ信号条件ありかを判定する。
【0031】
データ処理部3は、ステップS43、S45、S47、S49で設定到達領域、停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件に変更がなければ、処理を終了する。しかし、設定到達領域があり、停車状態を判定するための速度条件があり、エンジンキー信号条件があり、パーキングブレーキ信号条件がありの場合には、それぞれステップS44、S46、S48、S50に移行し、記憶部4の記憶エリア4A、4B、4C、4D、4Fに格納されている速度条件データV、経過時間データT、エンジンキー信号条件データE、パーキングブレーキ信号条件データB、設定到達領域データRを更新する。
【0032】
このようにして車両の目標位置への到達を検出するが、車両管理センター内の車両管理装置で、目標位置を中心とする設定到達領域の大きさや停車状態を判定するための速度条件、エンジンキー信号条件、パーキングブレーキ信号条件を可変とし、管理対象の車両に指定するので、目標位置到達検知を精度良く行うことができる。
【0033】
上述の実施例では設定到達領域を円形にしているが、この設定到達領域は従来と同様に多角形等の他の形状としても良く、このようにしても支障なく検出することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施例の目標位置到達判定システムを示す構成図である。
【図2】本発明における目標位置到達の判定の説明図である。
【図3】本発明の目標位置到達判定装置における目標位置到達の検知処理のフロー図である。
【図4】本発明における目標位置到達の判断に使用する目標到達条件情報のデータ変更処理のフロー図である。
【符号の説明】
【0035】
1…目標位置到達判定装置、2、21…通信処理部、3…データ処理部、4…記憶部、5…位置検出部、6…車両状態検出部、7…目標位置到達検知部、8…目標位置入力部、9…車両位置入力部、10…目的地到達完了条件入力部、11…車両速度入力部、12…エンジンキー信号入力部、13…パーキングブレーキ信号入力部、14…領域入力部、15…位置差計算部、16…到達判定部、20…車両管理装置、21…通信処理部、22…目標到達条件入力部、23…目標到達条件情報記憶部、24…データ表示部、N…無線通信網。
【特許請求の範囲】
【請求項1】
車両管理センター側と管理対象の車両に搭載する目標位置到達判定装置とを無線通信網で連結し、位置検出部を有して前記車両管理センターが任意に指定する設定到達領域に指示を受けた車両が入ったとき目標位置に到達したと判定すると共に、判定結果を前記車両管理センターに通報する目標位置到達判定装置であって、指定された目標位置データ及び設定到達領域データを格納する記憶部と、前記記憶部から取込む目標位置の設定到達領域及び目標位置と前記位置検出部で検出した車両位置の位置差を基に目標位置への到達判定を行う到達判定部を有する目標位置到達検知部を備えたものにおいて、
前記目標位置到達判定装置内に車両の状態を検出する車両状態検出部を備え、前記記憶部内には車両管理センター側から予め指定する目標値到達条件情報となる車両停止状態の条件データを格納しており、前記目標位置到達検知部は、車両が目標位置を含む設定到達領域内にあるとき、前記記憶部から取込む目標到達完了条件データと前記車両状態検出部から取込む停車状態情報とから目標到達を判定するものであることを特徴とする目標位置到達判定装置。
【請求項2】
請求項1において、前記目標位置到達検知部は、車両停車状態を判断する条件データとして記憶部に予め保存した速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件の各データと、前記車両状態検出部から検出する車両速度、エンジンキー信号、パーキングブレーキ信号とにより車両停車状態を判定するものであることを特徴とする目標位置到達判定装置。
【請求項3】
車両管理センター側で予め任意に設定する目標到達条件情報を、管理対象の車両に搭載する目標位置到達判定装置に記録保存しておき、当該車両が車両現在位置を検出した後、目標位置と設定領域から車両が目標位置を含む設定到達領域内にあると判定したとき、前記目標到達条件情報中の目的地完了条件と当該車両から取込む停車状態情報とを比較し、当該車両の停車状態を判断した時点で目標位置に到達と判定し、車両管理センター側に目標位置到達を通報することを特徴とする目標位置到達判定方法。
【請求項4】
車両管理センター側の車両管理装置と、車両に搭載する請求項1記載の目標位置到達判定装置とを無線通信網で連結して送受信を行う目標位置到達判定システムにおいて、
前記車両管理装置内には、前記目標到達条件を予め任意に設定する目標到達条件入力部と、前記目標到達条件の情報を確認するためのデータ表示部と、前記目標到達条件情報を記憶する車両管理装置側の記憶部と、前記目標位置到達判定装置の通信処理部との間で信号の送受信を行う車両管理装置側の通信処理部とを有して構成することを特徴とする目標位置到達判定システム。
【請求項1】
車両管理センター側と管理対象の車両に搭載する目標位置到達判定装置とを無線通信網で連結し、位置検出部を有して前記車両管理センターが任意に指定する設定到達領域に指示を受けた車両が入ったとき目標位置に到達したと判定すると共に、判定結果を前記車両管理センターに通報する目標位置到達判定装置であって、指定された目標位置データ及び設定到達領域データを格納する記憶部と、前記記憶部から取込む目標位置の設定到達領域及び目標位置と前記位置検出部で検出した車両位置の位置差を基に目標位置への到達判定を行う到達判定部を有する目標位置到達検知部を備えたものにおいて、
前記目標位置到達判定装置内に車両の状態を検出する車両状態検出部を備え、前記記憶部内には車両管理センター側から予め指定する目標値到達条件情報となる車両停止状態の条件データを格納しており、前記目標位置到達検知部は、車両が目標位置を含む設定到達領域内にあるとき、前記記憶部から取込む目標到達完了条件データと前記車両状態検出部から取込む停車状態情報とから目標到達を判定するものであることを特徴とする目標位置到達判定装置。
【請求項2】
請求項1において、前記目標位置到達検知部は、車両停車状態を判断する条件データとして記憶部に予め保存した速度条件、経過時間、エンジンキー信号条件、パーキングブレーキ信号条件の各データと、前記車両状態検出部から検出する車両速度、エンジンキー信号、パーキングブレーキ信号とにより車両停車状態を判定するものであることを特徴とする目標位置到達判定装置。
【請求項3】
車両管理センター側で予め任意に設定する目標到達条件情報を、管理対象の車両に搭載する目標位置到達判定装置に記録保存しておき、当該車両が車両現在位置を検出した後、目標位置と設定領域から車両が目標位置を含む設定到達領域内にあると判定したとき、前記目標到達条件情報中の目的地完了条件と当該車両から取込む停車状態情報とを比較し、当該車両の停車状態を判断した時点で目標位置に到達と判定し、車両管理センター側に目標位置到達を通報することを特徴とする目標位置到達判定方法。
【請求項4】
車両管理センター側の車両管理装置と、車両に搭載する請求項1記載の目標位置到達判定装置とを無線通信網で連結して送受信を行う目標位置到達判定システムにおいて、
前記車両管理装置内には、前記目標到達条件を予め任意に設定する目標到達条件入力部と、前記目標到達条件の情報を確認するためのデータ表示部と、前記目標到達条件情報を記憶する車両管理装置側の記憶部と、前記目標位置到達判定装置の通信処理部との間で信号の送受信を行う車両管理装置側の通信処理部とを有して構成することを特徴とする目標位置到達判定システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−4465(P2007−4465A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−183648(P2005−183648)
【出願日】平成17年6月23日(2005.6.23)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月23日(2005.6.23)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
[ Back to top ]