
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、監視領域内に侵入した人、動物、物体等の目標を検出する装置およびシステムに関する。
【背景技術】
【0002】
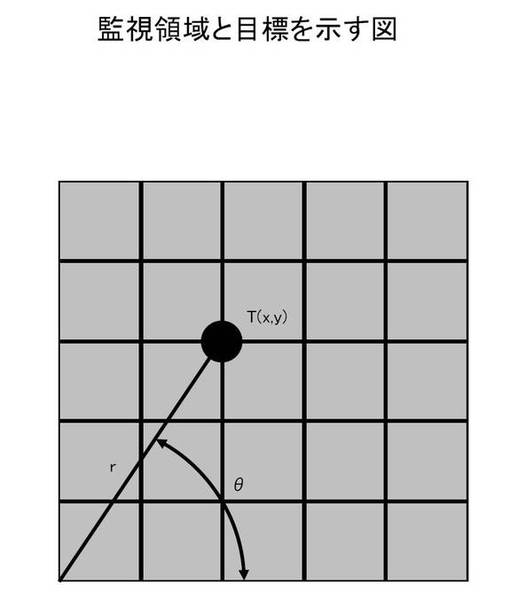
図20に示すように、所定の監視領域内に不特定多数の目標Tが侵入してきた場合、これを検出するために、従来より、カメラやレーザ、あるいはモノパルスレーダ等が用いられている。目標Tの位置は、例えば、デカルト座標(直交座標)では(x,y)で表され、極座標では(r,θ)で表される。
【0003】
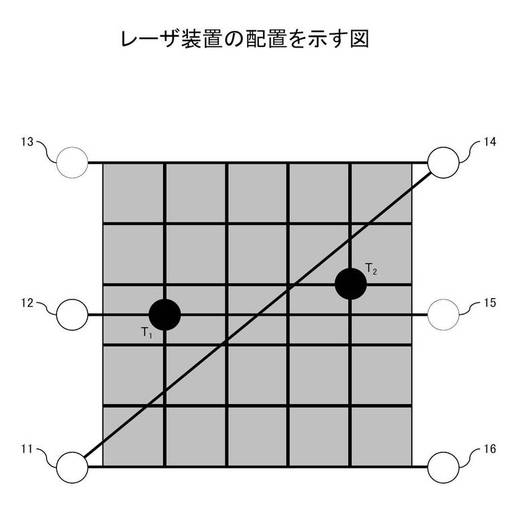
ところが、レーザ等の光学系の検出装置は、一般にビーム幅が極めて狭いため、ピンポイント検知が可能な反面、複数の目標を検出するためには、図21に示すように、多数の検出装置を配置しなければならないという問題がある。図21の例では、監視領域の周りに6台のレーザ装置11〜16が設置されており、装置間でレーザ光を照射して目標T1 およびT2 を検知する。
【0004】
また、たとえスキャン機構を備えた検出装置を用いたとしても、取り分け交差点や踏み切り等の暴露環境においては、蜘蛛の巣や埃等による光学部品の汚れがその検出能力を大幅に低下させるので、頻繁なメンテナンスが欠かせない。さらに、時刻による周辺環境の光学的特性の変化も、性能を保証する上で大きな問題となる。
【0005】
一方、レーダ等の電波系の検出装置は、耐環境性の面では有利である反面、一般に極座標上の点として目標の定位を行うため、性能上の問題が生じる。例えば、モノパルスレーダ装置では装置当たりの測角範囲は比較的広いものの、単一目標の角度しか得られない。また、アレイアンテナを用いたレーダ装置では、複数の目標の角度を計算できるものの、装置当たりの測角範囲が狭く、かつ、大きな信号処理コストを要する。
【0006】
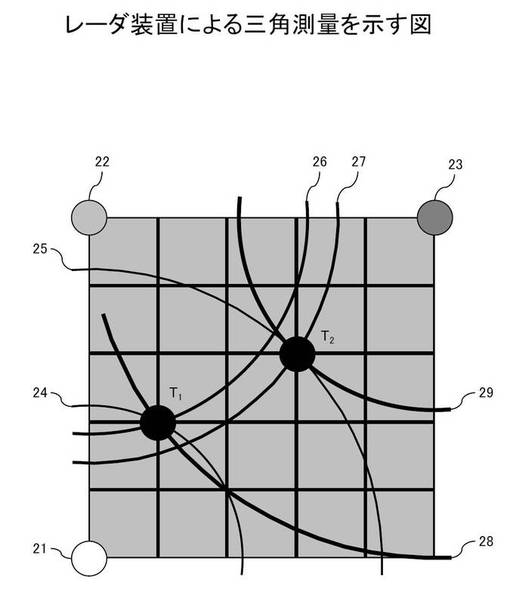
また、単純に複数のレーダ装置を用いて目標の視線距離情報のみを測定し、得られた情報を用いて円の方程式の組み合わせを解き、目標の直交座標上での位置を計算するという方法も考えられる。距離情報のみから三角測量により目標を一意的に定位する場合、監視領域が方形であれば、例えば図22に示すように、監視領域の周りの異なる3点にπ/2(90度)の測角範囲を持つ検出装置を配置する必要がある。したがって、少なくとも3台以上の検出装置が必要となる。
【0007】
図22の例では、監視領域の3頂点に検出装置21〜23がそれぞれ設置されており、三角測量により目標T1 およびT2 の位置を特定する。各検出装置から見たとき、目標T1 およびT2 はそれぞれ以下の円弧上に存在する。
1.検出装置21 T1 :円弧24 T2 :円弧25
2.検出装置22 T1 :円弧26 T2 :円弧27
3.検出装置23 T1 :円弧28 T2 :円弧29
【0008】
ところが、現状のモノパルスレーダ装置1台当たりの測角範囲は高々π/6(30度)程度であるから、この構成で複数の目標を一意的に定位するためには、各検出装置を3台のレーダ装置で構成する必要があり、全体では少なくとも9台以上のレーダ装置が必要となる。
【0009】
下記の特許文献1は、スペクトラム拡散方式のレーダを用いて所定エリア内の被監視物体を検知する方法に関する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−257919号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上述した従来の目標検出装置には、次のような問題がある。
(1)レーザ等の光学系の検出装置は、外部環境の影響を受けやすく、屋外に設置した場合には、その性能を保証するのが困難である。また、複数の目標を検出するためには、多数の検出装置を配置しなければならない。
(2)モノパルスレーダ装置は、1台で1つの目標を検知するのが原則であり、多数の目標を検知し、角度情報と距離情報とで各目標を定位するためには、目標数と同じ数のレーダ装置を設置しなければならない。また、3台のモノパルスレーダ装置を1組として、監視領域の周りの3点に1組ずつ配置し、距離情報のみを用いて三角測量で目標の位置を算出する方法も考えられるが、レーダ装置を構成する部品が高価であるため、可能な限り少ない台数で広範囲な測角を実現することが望ましい。
【0012】
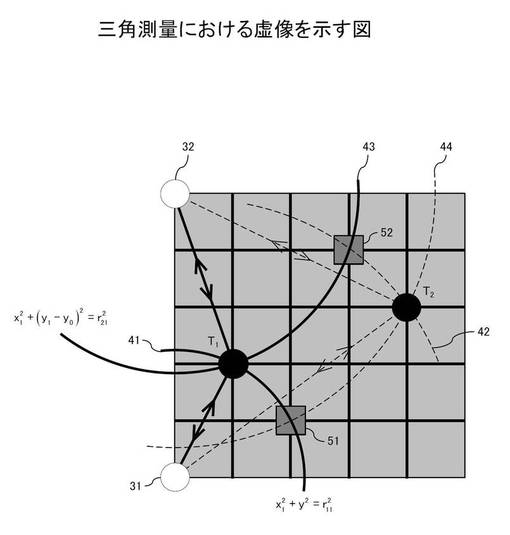
そこで、レーダ装置の台数を削減するために、例えば、図23に示すように、各々3台のレーダ装置からなる検出装置31および32を2点に設置して、目標の定位を行うことができるかどうかを考えてみる。各検出装置から見たとき、真の目標T1 およびT2 はそれぞれ以下の円弧上に存在する。
1.検出装置31 T1 :円弧41 T2 :円弧42
2.検出装置32 T1 :円弧43 T2 :円弧44
【0013】
検出装置31からT1 /T2 までの距離をそれぞれr11/r12とし、検出装置32からT1 /T2 までの距離をそれぞれr21/r22とすると、T1 (r11,r21)およびT2 (r12,r22)のように測定距離の正しいペアリングを行えば、各目標の座標が簡単な円の連立方程式から決定される。しかし、誤ったペアリングを行うと、虚像51および52の座標が算出されてしまう。
【0014】
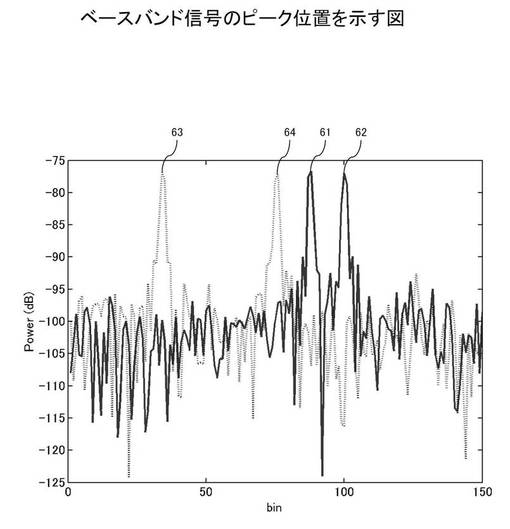
今、このシステムで目標T1 およびT2 の視線距離を測定したところ、図24のような結果が得られたとする。図24において、横軸は距離インデクスを表し、縦軸はベースバンド信号のパワーを表す。検出装置31におけるベースバンド信号には2つのピーク61および62が現れ、検出装置32におけるベースバンド信号には2つのピーク63および64が現れている。これらのピークの位置に対応する距離インデクスが、目標T1 およびT2 までの距離を示している。
【0015】
このとき、ピーク61および62の各々に対してピーク63または64を組み合わせることができるので、2通りの組み合わせが考えられ、監視領域内には合計4つの点の座標が求まる。つまり、目標T1 およびT2 と虚像51および52の座標である。
【0016】
円の連立方程式の解の個数は目標の個数の2乗に比例して増加するので、2台の検出装置では目標数が増加するほど、検出誤りを取り除くために多くの計算コストが必要となり、台数を減らせば即応性に問題が生じる。
(3)多数の目標が監視領域内に侵入してきた場合、これらを正確に判別するには、各目標の位置を、直交座標若しくは極座標上の点としてローカライズするのが望ましい。しかしながら、従来の検出装置では、光学系にしろレーダ系にしろ、このような多数目標の判別処理を自律測位計のみを用いて所望の時間内に行うのは、非常に困難である。
【0017】
本発明の第1の課題は、屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供することである。
【0018】
本発明の第2の課題は、監視領域内に侵入した複数の目標を高精度かつ高速に検出することである。
【課題を解決するための手段】
【0019】
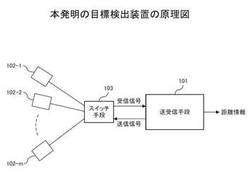
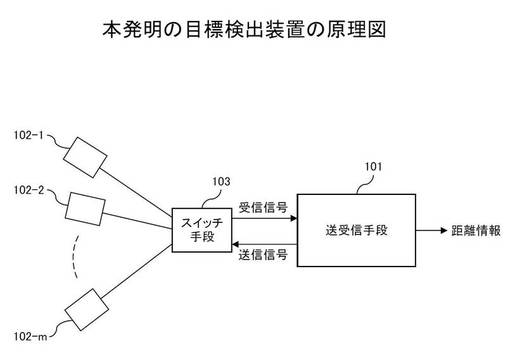
図1は、本発明の目標検出装置の原理図である。図1の目標検出装置は、送受信手段101、センサ手段102−1〜102−m、およびスイッチ手段103を備える。送受信手段101は、目標を検出するための送信信号を生成し、受信信号から目標の距離情報を抽出する。センサ手段102−1〜102−mは、それぞれ異なる角度範囲に向けて送信信号を送信し、目標により反射された信号を受信して、受信信号を送受信手段101に転送する。スイッチ手段103は、送受信手段101とセンサ手段102−1〜102−mの間の接続を、時分割で切り替える。
【0020】
センサ手段102−1〜102−mとしては、例えば、レーダ信号を送受信するアンテナや音波を送受信する音波センサが用いられる。これらのセンサ手段102−1〜102−mと、信号処理を行う送受信手段101とをスイッチ手段103で時分割的に接続することにより、単一の送受信手段101をセンサ手段102−1〜102−mで共用することが可能になる。したがって、信号処理用部品の総数を抑えた安価な構成で、広い監視領域をカバーすることができる。
【0021】
送受信手段101は、例えば、図2の送受信部200、無線周波数発振器209、およびベースバンド発振器210に対応し、センサ手段102−1〜102−mは、例えば、図2のアンテナA1〜A4または図6のアンテナ601〜605に対応する。スイッチ手段103は、例えば、図2の二極双投(DPDT)スイッチ201、202または図6の双方向性スイッチ606に対応する。
【0022】
また、本発明の第1および第2の目標検出システムはともに、第1および第2の目標検出装置と処理手段を備える。
【0023】
第1の目標検出システムにおいて、第1の目標検出装置は、それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から目標の第1の距離情報を抽出する。第2の目標検出装置は、それぞれ異なる角度範囲に向けて第2の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から目標の第2の距離情報を抽出する。
【0024】
処理手段は、目標の位置が、第1の目標検出装置により第1の距離情報が抽出されたときの第1の角度範囲と、第2の目標検出装置により第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、第1の距離情報および第2の距離情報から目標の位置を計算する。
【0025】
2台の目標検出装置のみを用いて目標の定位を行えば、3台の目標検出装置を用いる場合に比べて装置コストが確実に低下する。また、第1および第2の目標検出装置がセンサ手段をそれぞれ複数個備えることで、各装置の側角範囲が複数の角度範囲に分割される。したがって、2台の目標検出装置が同一の目標を捉えたとき、それぞれの角度範囲に共通する領域内にその位置を限定することが可能になる。これにより、その共通領域内の真の目標と、共通領域に含まれない虚像とを区別することができ、目標の誤検出の可能性が低下する。
【0026】
第2の目標検出システムにおいて、第1の目標検出装置は、第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から目標の第1の距離情報を抽出する。第2の目標検出装置は、第2の送信信号を送信し、目標により反射された信号を受信して、受信信号から目標の第2の距離情報を抽出する。
【0027】
処理手段は、複数の目標に対して第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、第1の目標検出装置から各目標までの第1の距離情報と、第2の目標検出装置から各目標までの第2の距離情報を取得する。また、第1の目標検出装置を送信機とし第2の目標検出装置を受信機とするバイスタティックモードで第1の目標検出装置と第2の目標検出装置を動作させて、送信機から各目標を経由して受信機に至る総合伝搬距離情報を各目標について取得する。そして、第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、複数の目標の位置を特定する。
【0028】
第1の目標検出システムと同様に、2台の目標検出装置のみを用いて目標の定位を行えば、3台の目標検出装置を用いる場合に比べて装置コストが低下する。また、バイスタティックモードの計測を行って、第1の目標検出装置から各目標を経由して第2の目標検出装置に至る総合伝搬距離情報を取得することで、各装置から各目標までの距離情報以外に、目標に関する付加的な距離情報が得られる。
【0029】
複数の目標のそれぞれについて第1および第2の距離情報が得られた場合、ある目標についての第1および第2の距離情報の組み合わせが正しければ、それらの和はその目標についての総合伝搬距離情報と一致するはずである。したがって、第1および第2の距離情報の和を総合伝搬距離情報と比較することで、第1および第2の距離情報の組み合わせが正しいか否かを判定することができる。そして、正しい組み合わせを用いて各目標の位置を特定することで、目標の誤検出の可能性が低下する。
【発明の効果】
【0030】
本発明によれば、部品点数を抑えた安価な構成の目標検出装置またはシステムにより、広い監視領域をカバーすることができる。
【0031】
また、監視領域の周りの異なる2点のみに目標検出装置を配置した場合でも、虚像による目標の誤検出を簡単な処理により排除し、複数の目標を高精度かつ高速に検出することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の目標検出装置の原理図である。
【図2】目標検出装置の構成図である。
【図3】第1の動作タイミングチャートである。
【図4】監視領域の分割方法を示す図である。
【図5】第2の動作タイミングチャートである。
【図6】5つのアンテナを用いた構成を示す図である。
【図7】第1の測位方法のフローチャートである。
【図8】一般的な測位方法を示す図である。
【図9】モノスタティックモードの動作を示す図である。
【図10】バイスタティックモードの動作を示す図である。
【図11】第2の測位方法のフローチャートである。
【図12】ハイブリッドシステムの構成図である。
【図13】間接変調のレーザ光源を示す図である。
【図14】モノパルスレーダ装置の構成図である。
【図15】アレイレーダ装置の構成図である。
【図16】第3の測位方法のフローチャートである。
【図17】3つの目標の第1の存在範囲を示す図である。
【図18】3つの目標の第2の存在範囲を示す図である。
【図19】N個の目標の定位処理のフローチャートである。
【図20】監視領域と目標を示す図である。
【図21】レーザ装置の配置を示す図である。
【図22】レーダ装置による三角測量を示す図である。
【図23】三角測量における虚像を示す図である。
【図24】ベースバンド信号のピーク位置を示す図である。
【発明を実施するための形態】
【0033】
以下、図面を参照しながら、本発明を実施するための最良の形態を詳細に説明する。
本実施形態においては、監視領域の周りの適当な箇所に2台以上の目標検出装置を設置し、これらを協調的に動作させて三角測量により目標の定位を行う。精度を向上させるためには、3台以上の目標検出装置を用いるのが望ましいが、以下では2台を用いた場合について、システムの各実装レベル毎に詳細を述べる。
【0034】
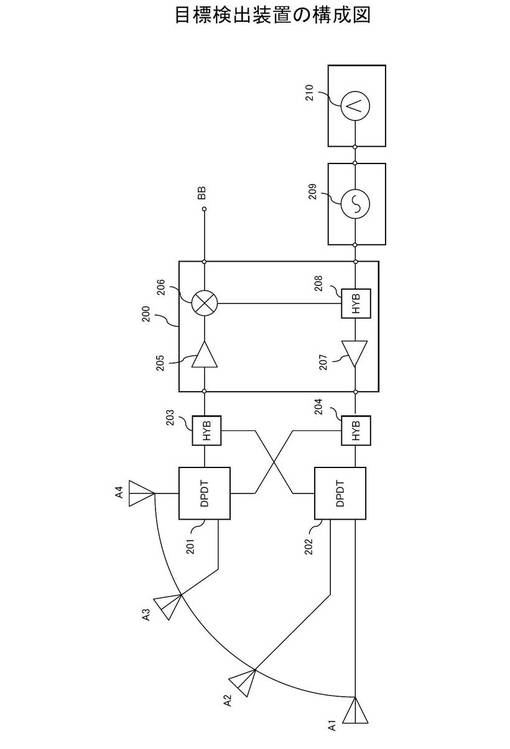
まず、装置の回路構成について説明する。図2は、レーダを用いた場合の目標検出装置の構成例を示している。図2の目標検出装置は、送受信共用のアンテナA1〜A4、二極双投(DPDT)スイッチ201、202、分岐部(HYB)203、204、208、低雑音増幅器205、ミキサ206、高出力増幅器207、無線周波数発振器209、およびベースバンド発振器210を備える。このうち、低雑音増幅器205、ミキサ206、高出力増幅器207、および分岐部208は、送受信部200に含まれる。
【0035】
ベースバンド発振器210は、三角波を生成して無線周波数発振器209に出力する。無線周波数発振器209は、例えば、電圧制御発振器であり、三角波により周波数変調された送信信号を生成する。分岐部208は、その送信信号を高出力増幅器207とミキサ206に出力し、高出力増幅器207は、送信信号を増幅し、分岐部204は、増幅された送信信号をスイッチ201および202に出力する。
【0036】
スイッチ201は、分岐部204からの送信信号をアンテナA3またはA4のいずれかに選択的に出力する機能と、アンテナA3またはA4のいずれかからの受信信号を選択して分岐部203に出力する機能とを有する。同様に、スイッチ202は、分岐部204からの送信信号をアンテナA1またはA2のいずれかに選択的に出力する機能と、アンテナA1またはA2のいずれかからの受信信号を選択して分岐部203に出力する機能とを有する。
【0037】
こうして、アンテナA1〜A4のいずれかから送信された信号は、監視領域内の目標により反射されて、そのアンテナにより受信される。分岐部203は、スイッチ201または202からの受信信号を低雑音増幅器205に出力し、低雑音増幅器205は、受信信号を増幅する。そして、ミキサ206は、増幅された受信信号と送信信号の一部をミキシングすることで、目標の距離情報および速度情報を含んだベースバンド(BB)信号を生成する。
【0038】
レーダ装置の場合、システム構成上最も高価な部品は無線周波数回路であるから、送受信部200、無線周波数発振器209、およびベースバンド発振器210を複数のアンテナA1〜A4で共用している。また、アンテナ総数を減らして、装置開口当たりのユニットアンテナの利得を向上させるため、双方向性スイッチ201および202を用いて、アンテナA1〜A4と送受信部200を接続し、必要な測角範囲を時分割でカバーする。
【0039】
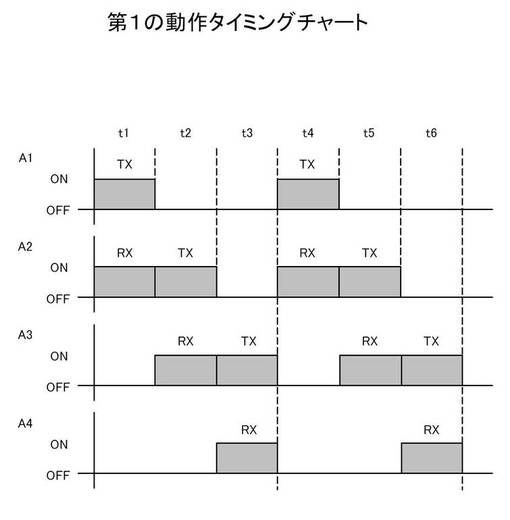
この例では4個のアンテナを用いているので、隣接する2個のアンテナ(送受信各1個)を測位に利用する場合には測角範囲は3分割され、隣接する3個のアンテナ(送信に1個、受信に2個等)を測位に利用する場合には測角範囲は2分割されることになる。
【0040】
送受信に各1個のアンテナを利用する場合の時分割動作は、例えば、図3に示すようになる。まず、タイムスロットt1では、アンテナA1が信号を送信し、アンテナA2が信号を受信する。次に、タイムスロットt2では、アンテナA2が信号を送信し、アンテナA3が信号を受信する。そして、タイムスロットt3では、アンテナA3が信号を送信し、アンテナA4が信号を受信する。タイムスロットt4〜t6でも同様の動作が行われる。なお、本構成例では例えば、双方向性スイッチ202は、タイムスロットt1に於いて分岐部204からアンテナA1へ向かう送信信号と、アンテナA2から分岐部203へ向かう受信信号とを、t1を細分した周期で適宜切り替えるものとする。
【0041】
このように、複数のアンテナと1つの送受信部を双方向性スイッチで時分割的に接続することにより、部品点数を抑えた安価な構成で全監視領域をカバーすることが可能になる。
【0042】
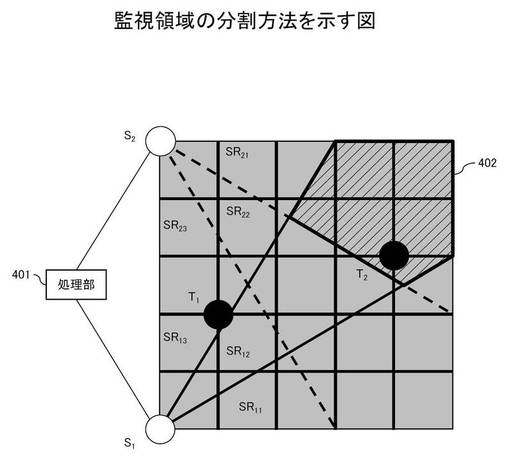
次に、監視領域の空間分割について説明する。図4に示すように、システムが監視すべき範囲を個々のアンテナの測角範囲に応じて適宜分割し、特定の時間帯において特定の領域の空間情報のみが、目標の座標を与える連立方程式の拘束条件として有効となるようにする。そして、有効な方程式の組み合わせから目標の位置を算出する。これにより、2台の目標検出装置を用いた場合の虚像の問題が解消される確率が高くなる。
【0043】
図4の例では、監視領域の2頂点に目標検出装置S1 およびS2 が配置され、各々のπ/2の測角範囲をSR11〜SR13またはSR21〜SR23の3領域に分割して監視する。したがって、全監視領域はSR11〜SR13∩SR21〜SR23の9個の擬似排他領域に分割される。
【0044】
処理部401は、目標検出装置S1 およびS2 に接続され、高速フーリエ変換部、CPU(中央処理装置)、メモリ等を含む。メモリには、監視領域の分割方法と各排他領域の位置および形状に関する情報が、あらかじめ格納されている。このうち、各排他領域の情報としては、領域内部の座標を表す不等式等が用いられる。
【0045】
処理部401は、目標検出装置S1 およびS2 の動作を制御するとともに、各目標検出装置から出力されるベースバンド信号の高速フーリエ変換を行って、目標の距離情報および速度情報を抽出する。そして、抽出された距離情報を用いて目標の位置を算出する。
【0046】
目標検出装置S1 およびS2 としては、例えば、図2に示した装置が用いられ、隣接する2個のアンテナが各角度範囲の計測を担当する。このとき、処理部401は、スイッチ201および202を所定のタイムスロット毎に切り替えることにより、アンテナA1〜A4の時分割動作を制御する。
【0047】
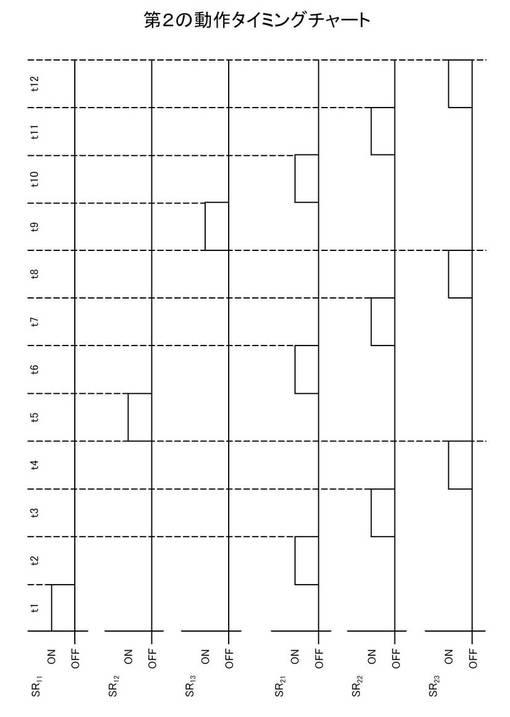
この場合の時分割動作は、例えば、図5に示すようになる。まず、タイムスロットt1では、目標検出装置S1 によりSR11の計測が行われ、続いてタイムスロットt2〜t4では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。次に、タイムスロットt5では、目標検出装置S1 によりSR12の計測が行われ、続いてタイムスロットt6〜t8では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。
【0048】
そして、タイムスロットt9では、目標検出装置S1 によりSR13の計測が行われ、続いてタイムスロットt10〜t12では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。このような時分割動作が繰り返される。
【0049】
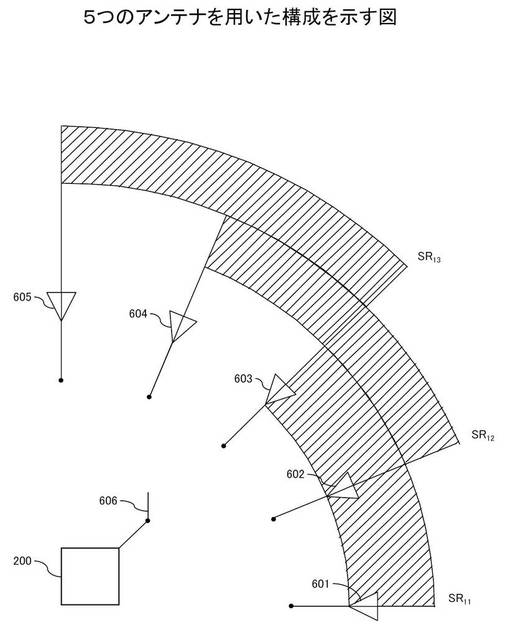
ところで、図4のような空間分割を行う場合、アンテナの数は必ずしも4個に限られるわけではない。例えば、図6に示すように、5個のアンテナ601〜605を用いた場合は、アンテナ601〜603がSR11をカバーし、アンテナ602〜604が角度範囲SR12をカバーし、アンテナ603〜605が角度範囲SR13をカバーする。これらのアンテナは、双方向性スイッチ606により送受信部200と接続される。スイッチ606としては、例えば、二極双投スイッチと二極三投(DP3T)スイッチの組み合わせが用いられる。
【0050】
次に、図4のような空間分割に基づく目標の測位アルゴリズムについて説明する。図4において、目標検出装置S1 の位置をxy座標系の原点(0,0)とし、横軸および縦軸をそれぞれx軸およびy軸とし、目標検出装置S2 の座標を(0,y0 )とする。
【0051】
また、目標検出装置S1 およびS2 を図5のタイミングチャートに従って動作させ、目標検出装置S1 により測定された目標T1 /T2 までの視線距離をそれぞれr11/r12とし、目標検出装置S2 により測定された目標T1 /T2 までの視線距離をそれぞれr21/r22とする。
【0052】
さらに、目標T1 /T2 の座標を(x1 ,y1 )/(x2 ,y2 )とすると、円の連立方程式として次の4式が得られる。
【0053】
【数1】

SR12とSR21の共通領域402(SR12∩SR21)がアクティブになる時間帯(タイムスロットt5およびt6)にデータ測定が行われたものとすると、有効な方程式の組は、距離の範囲から明らかに(2)式と(4)式であり、次式によって一意的にT2 の座標が決定される。
【0054】
【数2】
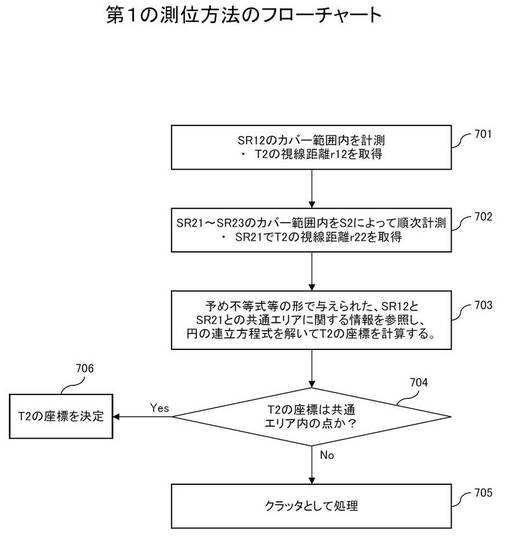
図7は、この場合の目標T2 の測位方法のフローチャート例である。まず、処理部401は、目標検出装置S1 にSR12の範囲を計測させ、目標T2 の視線距離r12を取得する(ステップ701)。次に、目標検出装置S2 にSR21〜SR23の範囲を順番に計測させ、SR21の範囲で目標T2 の視線距離r22を取得する(ステップ702)。
【0055】
次に、あらかじめメモリ内に格納された領域402に関する情報を参照し、円の連立方程式を解いてT2 の座標を求める(ステップ703)。このとき、2つの円の交点として2点の座標が得られるため、各点について領域402に含まれるか否かを検証する(ステップ704)。
【0056】
そして、領域402に含まれる点をT2 の位置に決定し、r12およびr22を円の連立方程式の適用対象から除外する(ステップ706)。一方、領域402に含まれない点については、クラッタとして破棄する(ステップ705)。
【0057】
このように、各タイムスロットにおいて計測対象となる排他領域の空間情報を与えて円の連立方程式を解けば、他の目標からの影響を受けるものの、方程式の組み合わせの曖昧さに起因する虚像の検出確率が低くなり、目標の座標が一意的に定まる確率が高くなる。
【0058】
監視領域の空間分割は、時間だけでなく、周波数あるいは符号に基づいて実施してもよい。例えば、コード分割の場合は、各排他領域に固有の符号を付加しておき、SR11〜SR13およびSR21〜SR23のそれぞれの角度範囲に対して、その範囲に含まれる複数の排他領域の符号を割り当てる。そして、S1 およびS2 が計測した角度範囲の両方に割り当てられた符号により、目標が存在する排他領域を特定する。
【0059】
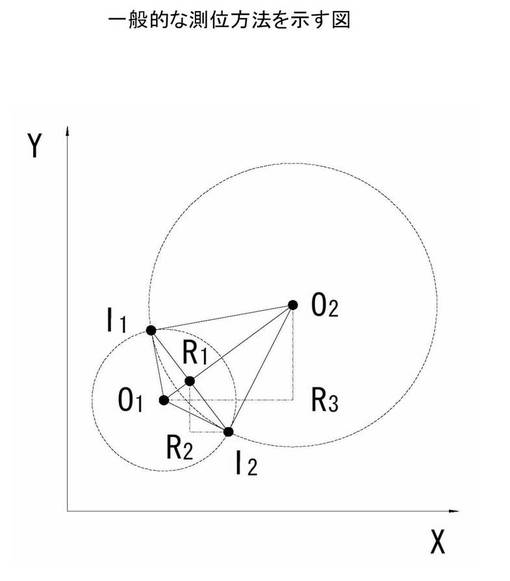
上述の例では、簡単のため、目標検出装置S1 およびS2 の座標を特殊な値に設定しているが、図8に示すように、これらが任意の位置O1 (x01,y01)およびO2 (x02,y02)に設置された場合でも、目標までの視線距離の情報のみから円の交点I1 (x1 ,y1 )およびI2 (x2 ,y2 )を算出することが可能である。
【0060】
図8において、O1 およびO2 を通る直線とI1 およびI2 を通る直線の交点R1 の座標を(xR ,yR )とし、各点間の距離をそれぞれO1 −O2 :d、O1 −I1 :r1 、O1 −R1 :s、O2 −I1 :r2 、I1 −R1 (=I2 −R1 ):t、R2 −I2 :dx、R2 −R1 :dyとする。このとき、真の目標または虚像のいずれかに対応する2点I1 およびI2 の座標は、次式により求められる。なお、R2 はR1 からy軸に平行に下ろした直線とI2 からx軸に平行に引いた直線との交点であり、またR3 はO2 からy軸に平行に下ろした直線とO1 からx軸に平行に引いた直線との交点である。
【0061】
【数3】
なお、監視領域の空間分割の方法は、図4のような9分割に限定されるものではなく、目標検出装置S1 およびS2 の構成に応じて適切な分割方法が採用される。
【0062】
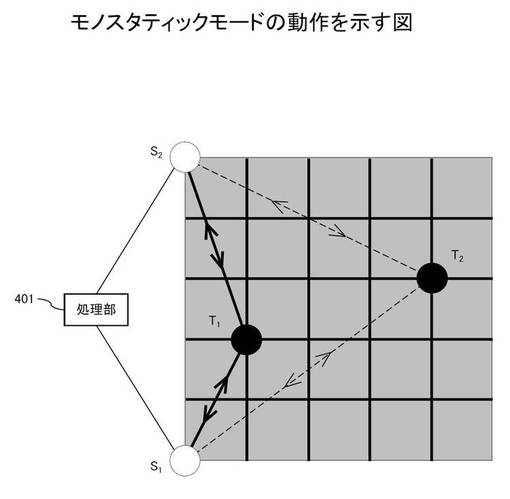
次に、同期測位の方法について説明する。この測位方法では、まず、図9に示すように、モノスタティックモードにおいて、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、目標T1 /T2 までの視線距離r11/r12およびr21/r22の測定を行う。
【0063】
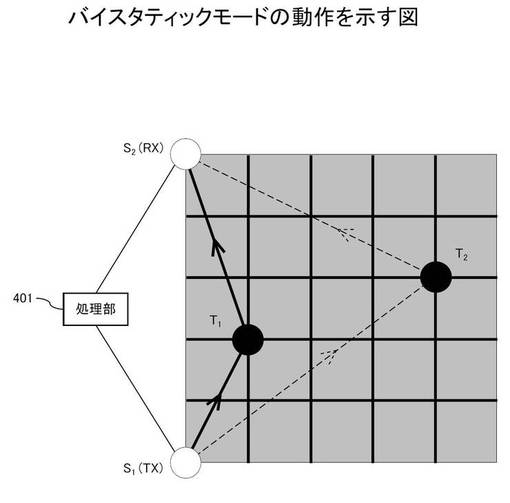
次に、図10に示すように、バイスタティックモードにおいて、互いに離れた位置にある目標検出装置S1 およびS2 で送受信系を構成し、バイスタティックレーダとして動作させる。例えば、S1 からの送信信号がT1 /T2 によってバイスタティック反射された成分をS2 によって測定し、S1 →T1 →S2 およびS1 →T2 →S2 の各経路の総合伝搬距離であるr112 (=r11+r21)およびr122 (=r12+r22)を測定する。もちろん、S1 とS2 の役割を入れ替えて、逆の伝搬順序で測定してもかまわない。
【0064】
最後に、上述した円の方程式の組から計算された監視領域内のT1 /T2 の座標(2つの虚像を含む4点の座標)を用いて4つの総合伝搬距離を計算し、これらをr112 (=r11+r21)およびr122 (=r12+r22)の測定値と比較すれば、T1 /T2 の正しい座標が求められる。例えば、T1 の正しい座標は、(1)式と(3)式の組から計算されたものであることが簡単に分かる。
【0065】
このとき、例えば、次式のような距離の差分の絶対値を目的関数として用いた最適化処理を行って、各目標の座標を求めてもよい。各目標の座標の初期値は、(1)式〜(4)式を適当に組み合わせて計算することができる。
【0066】
【数4】
このように、モノスタティックモードとバイスタティックモードで得られた情報を組み合わせることで、正確な目標の座標を決定することができる。
【0067】
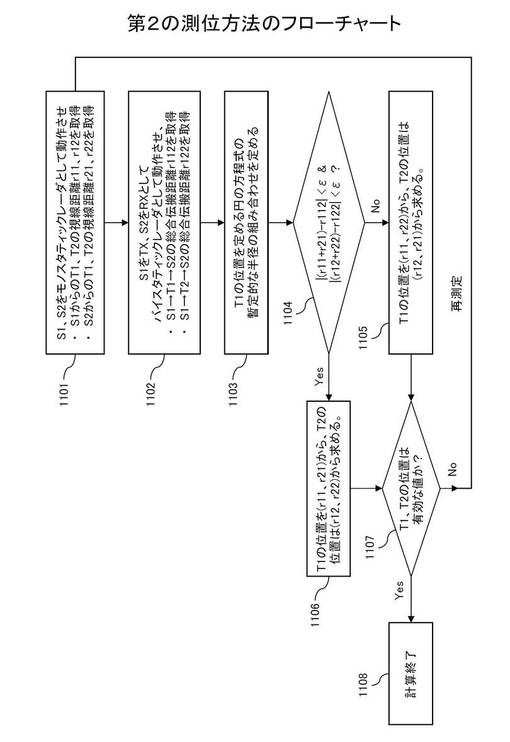
図11は、同期測位を用いた目標T1 およびT2 の測位方法のフローチャートである。まず、処理部401は、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、視線距離r11、r12、r21、およびr22を取得する(ステップ1101)。ただし、この段階では、r11およびr12のいずれが目標T1 までの正しい距離であるかは確定しておらず、同様に、r21およびr22のいずれが目標T2 までの正しい距離であるかは確定していないものとする。
【0068】
次に、S1 を送信機、S2 を受信機とするバイスタティックレーダとして動作させ、S1 →T1 →S2 およびS1 →T2 →S2 の総合伝搬距離r112 およびr122 を取得する(ステップ1102)。
【0069】
次に、円の連立方程式を用いて目標T1 の位置を計算するために、暫定的な半径の組み合わせを決定する(ステップ1103)。ここでは、例えば、r11とr21が暫定的な組み合わせとして決定される。
【0070】
次に、微小な閾値εを用いて、以下の2つの不等式が満たされるか否かをチェックする(ステップ1104)。
【0071】
|(r11+r21)−r112 |<ε & |(r12+r22)−r122 |<ε (9)
【0072】
これらの不等式が満たされれば、目標T1 の座標をr11とr21の組み合わせから計算し、目標T2 の座標をr12とr22の組み合わせから計算する(ステップ1106)。いずれかの不等式が満たされなければ、目標T1 の座標をr11とr22の組み合わせから計算し、目標T2 の座標をr12とr21の組み合わせから計算する(ステップ1105)。
【0073】
そして、計算された目標T1 およびT2 の座標が有効な値か否かをチェックする(ステップ1107)。ここでは、例えば監視領域が一辺y0の正方形である場合、x座標およびy座標がともに区間[0,y0]内の正の実数であれば有効と判定され、それ以外の値であれば無効と判定される。目標T1 およびT2 の座標が有効な値であれば測位を終了し(ステップ1108)、そうでなければステップ1101以降の動作を繰り返して再測定を行う。なお、例えば安全性を重視するアプリケーションでは、事前に設定した適当な回数だけ再測定を行っても妥当な値が得られない場合、例えば、モノスタティック測定の結果のみを用い、監視領域内に現れる全ての点の座標を実在する目標点として処理する(安全性があまり問題でないアプリケーションでは、クラッタとして処理することもあり得る)。
【0074】
次に、レーザやカメラ等の光学系センサとライダ/レーダ装置を用いた混合測位の方法について説明する。前述したように、侵入者のピンポイント検出という観点からは、レーダよりレーザの方が優れている場合がある。そこで、普段はレーダを用いて広角監視モードで広い範囲を監視しておき、時間的な意味も含めて緊急性の高い領域への侵入が予想された場合、侵入者を確実に検出するためにレーザを用いる、というハイブリッドシステムが考えられる。
【0075】
このシステムでは、単一のレーザ光源を適切な信号源を用いて直接または間接的に変調し、変調された光信号をそのまま各装置へ分配し、各装置内で光検出器等を用いて、レーダ信号として必要な同期の取れた源振を回復する。
【0076】
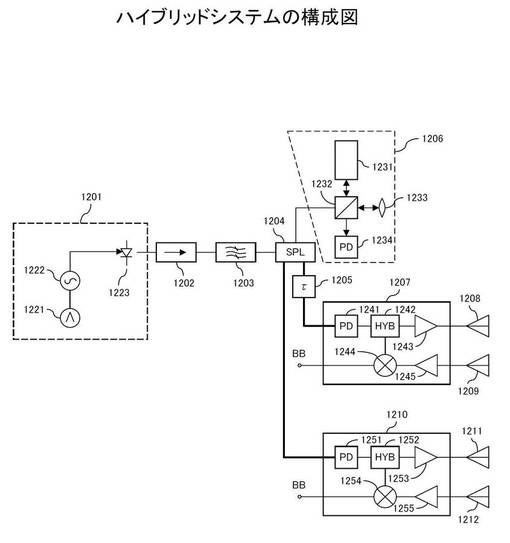
図12は、このようなハイブリッドシステムの構成例を示している。このシステムは、レーザ光源1201、光アイソレータ1202、光バンドパスフィルタ1203、スプリッタ1204、遅延器1205、レーザ検出部1206、レーダ送受信部1207、1210、送信アンテナ1208、1211、および受信アンテナ1209、1212を備える。スプリッタ1204と遅延器1205、遅延器1205とレーダ送受信部1207、スプリッタ1204とレーダ送受信部1210は、それぞれ位相安定化光ファイバで接続されている。
【0077】
レーザ光源1201は、ベースバンド発振器1221、無線周波数発振器1222、および分布帰還型レーザ1223を含む。分布帰還型レーザ1223の出力光は、ベースバンド発振器1221および無線周波数発振器1222により生成された送信信号により直接変調され、光信号として出力される。この光信号は、光アイソレータ1202および光バンドパスフィルタ1203を経由して、スプリッタ1204により3つに分岐する。
【0078】
1番目の光信号はレーザ検出部1206に転送され、2番目の光信号は遅延器1205を経由してレーダ送受信部1207に転送され、3番目の光信号はレーダ送受信部1210に転送される。遅延器1205の遅延量τは、レーダ送受信部1207とレーダ送受信部1210への光信号の到達時間が同じになるように設定される。
【0079】
レーザ検出部1206は、基準ミラー1231、ハーフミラー1232、レンズ1233、および光検出器(PD)1234を含み、レーザ光源1201から転送された光を、ハーフミラー1232およびレンズ1233を介して監視領域に照射する。そして、目標からの反射光をレンズ1233およびハーフミラー1232を介して、光検出器1234により検出する。
【0080】
レーザ検出部1206の別の構成例としては、ガルバノミラー型光スキャナと光検出器アレイの組み合わせも考えられる。
【0081】
レーダ送受信部1207は、光検出器1241、分岐部(HYB)1242、高出力増幅器1243、ミキサ1244、および低雑音増幅器1245を含み、レーダ送受信部1210は、光検出器1251、分岐部1252、高出力増幅器1253、ミキサ1254、および低雑音増幅器1255を含む。各レーダ送受信部は、レーザ光源1201から転送された光信号を、光検出器により送信信号に変換して、図2の送受信部200と同様の動作を行う。
【0082】
例えば、レーダ送受信部1207、送信アンテナ1208、および受信アンテナ1209は、図4の目標検出装置S1 として用いられ、レーダ送受信部1210、送信アンテナ1211、および受信アンテナ1212は、図4の目標検出装置S2 として用いられる。
【0083】
このシステムでは、単一のレーザ光源1201を源振として2つのレーダ装置に用いる電磁波が生成される。したがって、図10のバイスタティックモードにおいて、例えば、S1 →T1 →S2 なる経路で総合伝搬距離を測定する際に、S1 とS2 のローカル光源のコヒーレンスを高めることができ、測定精度が向上する。
【0084】
これらのレーダ装置のアンテナ部分の構成としては、図2に示した送受信共用の複数のアンテナを用いることも可能である。
【0085】
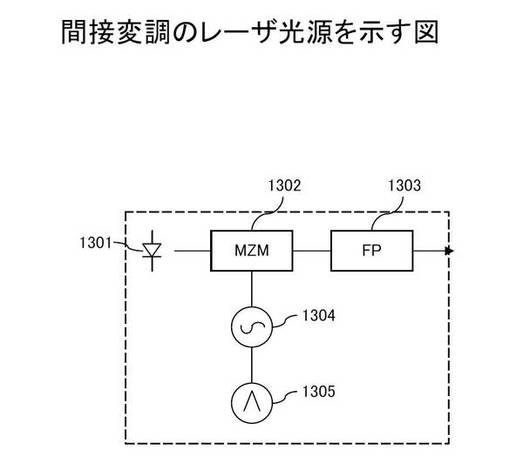
図13は、図12のレーザ光源1201の別の構成例を示している。このレーザ光源は、分布帰還型レーザ1301、マッハツェンダ変調器(MZM)1302、ファブリペロ(FP)レーザ1303、無線周波数発振器1304、およびベースバンド発振器1305を含む。マッハツェンダ変調器1302は、分布帰還型レーザ1301の出力光を、ベースバンド発振器1305および無線周波数発振器1304により生成された送信信号により間接的に変調する。マッハツェンダ変調器1302からの光は、ファブリペロレーザ1303を介して外部に出力される。
【0086】
また、ピンポイント検出性よりも証拠保全性を重視する場合は、上記ハイブリッドシステムにおいて、レーザの代わりにカメラを用いることが望ましい。この場合、普段はレーダを用いて広角監視モードで監視を行い、緊急性の高い領域への侵入が予想された場合、証拠を残すためにカメラで侵入者を撮像する。これは、例えば監視領域を物理的に仕切るための何らかの装置、機構を監視時間中に損壊して突破するような目標の特定等にも用いられる。
【0087】
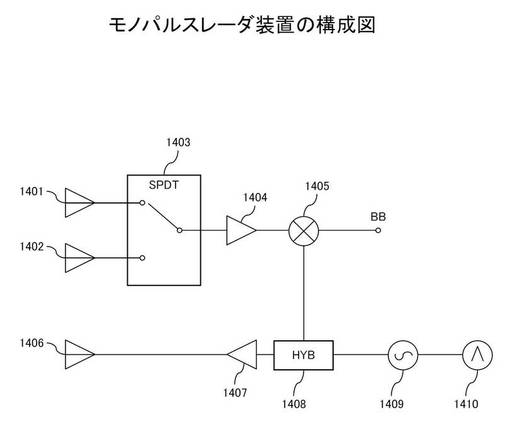
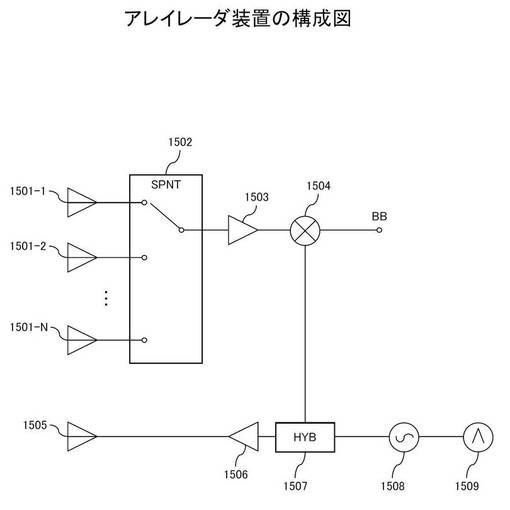
ところで、上述した実施形態では、目標検出装置S1 およびS2 として、図2または図12の回路構成のレーダ装置を採用しているが、他の回路構成を採用することも、もちろん可能である。例えば、図14に示すモノパルスレーダ装置や図15に示すアレイレーダ装置を目標検出装置として採用することができる。
【0088】
図14のモノパルスレーダ装置は、受信アンテナ1401、1402、単極双投(SPDT)スイッチ1403、低雑音増幅器1404、ミキサ1405、送信アンテナ1406、高出力増幅器1407、分岐部(HYB)1408、無線周波数発振器1409、およびベースバンド発振器1410を備える。このモノパルスレーダ装置は、広い測角範囲を有するが、単一の目標の角度しか測定することができない。
【0089】
図15のアレイレーダ装置は、N個の受信アンテナ1501−1〜1501−N、単極N投(SPNT)スイッチ1502、低雑音増幅器1503、ミキサ1504、送信アンテナ1505、高出力増幅器1506、分岐部(HYB)1507、無線周波数発振器1508、およびベースバンド発振器1509を備える。このアレイレーダ装置は、受信アンテナ1501−1〜1501−Nからなるアレイアンテナにより、多数の目標を測位することができるが、その測角範囲は一般に狭い。
【0090】
図4に示した空間分割を採用する場合は、目標検出装置S1 およびS2 として、それぞれ3台のモノパルスレーダ装置またはアレイレーダ装置を設置することが望ましい。この場合も、監視領域の空間分割は、時間、周波数、符号等に基づいて実施される。
【0091】
さらに、目標検出装置としては、レーダ装置の代わりにソナー装置等の他の装置を用いることも可能である。例えば、図2の目標検出装置としてソナー装置を用いた場合は、アンテナA1〜A4を、音波を送受信する音波センサ(圧電素子)に置き換え、無線周波数発振器209をソナー用発振器に置き換えればよい。
【0092】
同様に、図12のレーダ装置の代わりにソナー装置を用いた場合は、送信アンテナ1208、1211および受信アンテナ1209、1212を音波センサに置き換え、無線周波数発振器1222をソナー用発振器に置き換えればよい。
【0093】
また、図4、図9、および図10のシステムにおいて目標検出装置を3台以上配置した場合でも、処理部401は、適当な2台の目標検出装置を組み合わせて、同様のアルゴリズムにより測位を行うことができる。
【0094】
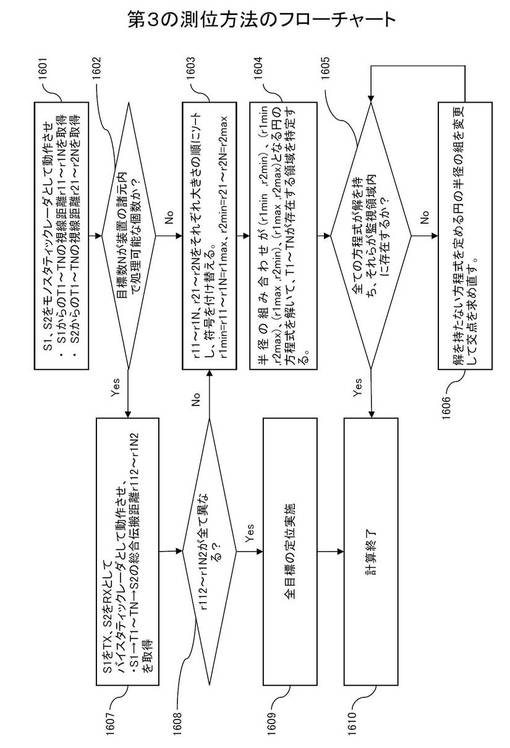
次に、監視領域内にN個の目標T1 〜TN が存在する場合の測位方法について説明する。例えば、図9および図10に示した2台の目標検出システムを用いた測位方法のフローチャートは、図16のようになる。
【0095】
まず、処理部401は、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、S1 からT1 〜TN までの視線距離r11〜r1Nと、S2 からT1 〜TN までの視線距離r21〜r2Nを取得する(ステップ1601)。そして、目標数Nが処理部401の性能により処理可能な個数か否かを判定する(ステップ1602)。処理可能な個数の上限は、あらかじめメモリに格納されているものとする。
【0096】
目標数Nが処理可能な個数であれば、次に、S1 を送信機、S2 を受信機とするバイスタティックレーダとして動作させ、N個の経路S1 →T1 →S2 〜S1 →TN →S2 の総合伝搬距離r112 〜r1N2 を取得する(ステップ1607)。そして、得られたr112 〜r1N2 がすべて異なる値か否かをチェックする(ステップ1608)。
【0097】
r112 〜r1N2 がすべて異なる値であれば、それらの値を用いて目標T1 〜TN の座標を計算し(ステップ1609)、測位を終了する(ステップ1610)。
【0098】
ステップ1602において、目標数Nが処理可能な個数を超えていれば、視線距離r11〜r1Nおよびr21〜r2Nをそれぞれ大きさの昇順にソートし、小さいものから順に改めて符号r11〜r1Nおよびr21〜r2Nを付与する(ステップ1603)。これにより、S1 からの視線距離の最小値r1minはr11となり、最大値r1maxはr1Nとなる。同様に、S2 からの視線距離の最小値r2minはr21となり、最大値r2maxはr2Nとなる。
【0099】
次に、半径の組み合わせが(r1min,r2min)、(r1min,r2max)、(r1max,r2min)、および(r1max,r2max)となる円の連立方程式を解いて、目標T1 〜TN が存在する領域を特定する(ステップ1604)。そして、すべての方程式が解を持ち、それらの解が監視領域内に存在するか否かをチェックし(ステップ1605)、そのような解が得られれば、測位を終了する(ステップ1610)。
【0100】
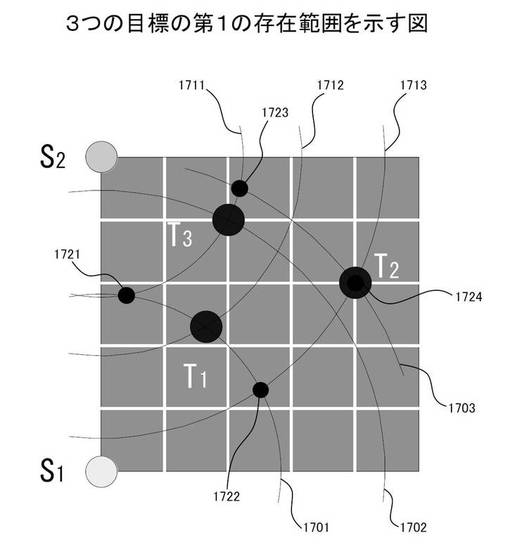
例えば、図17に示すように、監視領域内に3つの目標T1 〜T3 が存在する場合、ソート後の視線距離r11〜r13およびr21〜r23を半径とする円1701〜1703および1711〜1713のそれぞれに対して、円の方程式を想定することができる。このうち、半径の組み合わせが(r11,r21)、(r11,r23)、(r13,r21)、および(r13,r23)となる円の連立方程式を解くことで、4つの交点1721〜1724の座標が得られる。目標T1 〜T3 は、これらの交点に囲まれた領域に含まれている。そこで、例えば、これらの交点を頂点とする四角形の領域が、目標T1 〜T3 の存在範囲として特定される。
【0101】
ステップ1605において、一部の方程式が解を持たないか、または、解が監視領域内に存在しなければ、その方程式を定める半径の組み合わせを変更して、交点を計算し直す(ステップ1606)。そして、ステップ1605以降の処理を行う。
【0102】
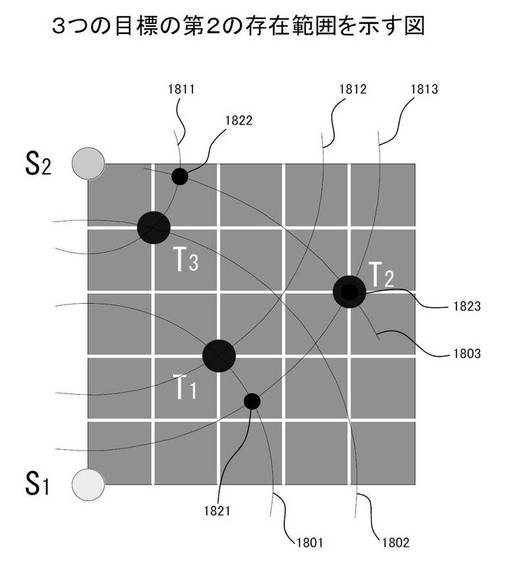
例えば、図18に示すように、目標T1 〜T3 のソート後の視線距離r11〜r13およびr21〜r23を半径とする円1801〜1803および1811〜1813のそれぞれに対して、円の方程式を想定することができる。このうち、半径の組み合わせが(r11,r23)、(r13,r21)、および(r13,r23)となる円の連立方程式を解くことで、3つの交点1821〜1823の座標が得られる。
【0103】
ところが、半径の組み合わせが(r11,r21)となる円1801および1811は交点を持たないため、この組み合わせからは解が得られない。そこで、2番目に小さい視線距離r12およびr22を用いて、半径の組み合わせが(r11,r22)および(r12,r21)となる円の連立方程式を改めて解く。これにより、目標検出装置S1 およびS2 からの距離が最も近い交点である、目標T1 およびT3 の座標が得られる。この場合、例えば、交点1821〜1823とT1 およびT3 の位置を頂点とする多角形の領域が、目標T1 〜T3 の存在範囲として特定される。
【0104】
ステップ1608において、総合伝搬距離r112 〜r1N2 の一部が同じ値であれば、ステップ1603以降の処理を行う。
【0105】
このような測位方法によれば、監視領域内に多数の目標が侵入し、処理部401の性能上、所定時間内にすべての目標の定位が行えない場合でも、それらの目標の存在範囲を特定し、危険エリアとして認識することができる。
【0106】
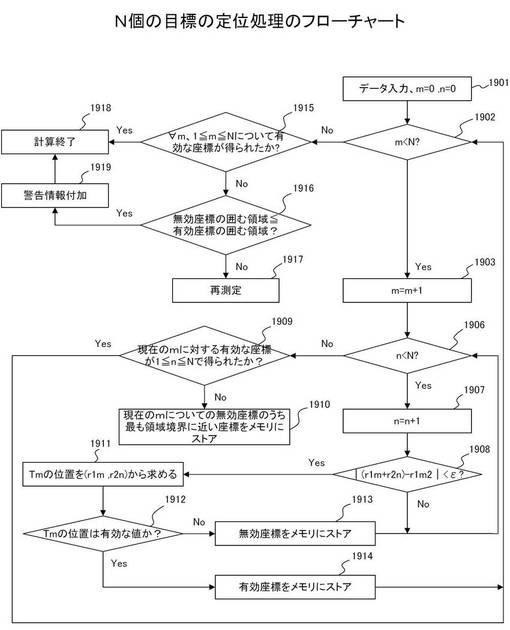
図19は、図16のステップ1609における目標T1 〜TN の定位処理のフローチャートである。まず、処理部401は、視線距離r11〜r1Nおよびr21〜r2Nと総合伝搬距離r112 〜r1N2 をデータとしてメモリに格納し、制御変数mおよびnをそれぞれ0とおく(ステップ1901)。そして、mと目標数Nを比較する(ステップ1902)。
【0107】
mがNより小さければ、m=m+1とおき(ステップ1903)、続いてnとNとを比較する(ステップ1906)。
【0108】
nがNより小さければ、n=n+1とおき(ステップ1907)、微小な閾値εを用いて、以下の不等式が満たされるか否かをチェックする(ステップ1908)。
【0109】
|(r1m+r2n)−r1m2 |<ε (10)
【0110】
この不等式が満たされれば、半径の組み合わせが(r1m,r2n)となる円の連立方程式から目標Tm の座標を計算し(ステップ1911)、その座標が有効な値か否かをチェックする(ステップ1912)。目標Tm の座標が有効な値でなければ、その座標を無効座標としてメモリに格納して(ステップ1913)、ステップ1906以降の処理を繰り返す。一方、目標Tm の座標が有効な値であれば、その座標を有効座標としてメモリに格納して(ステップ1914)、ステップ1902以降の処理を繰り返す。また、ステップ1908において、不等式が満たされなければ、ステップ1906以降の処理を繰り返す。
【0111】
ステップ1906において、nがNに達していれば、次に、現在のmの値に対する有効座標が1≦n≦Nの範囲で得られたか否かをチェックする(ステップ1909)。そのような有効座標がメモリに格納されていれば、ステップ1902以降の処理を繰り返す。一方、そのような有効座標がメモリに格納されていなければ、現在のmの値に対する無効座標のうち監視領域の境界に最も近い座標を、目標Tm の無効座標としてメモリに格納し(ステップ1910)、ステップ1902以降の処理を繰り返す。
【0112】
ステップ1902において、mがNに達していれば、次に、1≦m≦Nの範囲のすべてのmについて有効座標が得られたか否かをチェックする(ステップ1915)。そして、すべての有効座標がメモリに格納されていれば、計算を終了する(ステップ1918)。
【0113】
いずれかのmについて無効座標がメモリに格納されていれば、有効座標により囲まれる領域が無効座標により囲まれる領域を含んでいるか否かをチェックする(ステップ1916)。前者が後者を含んでいれば、計算結果に警告情報を付加して(ステップ1919)、計算を終了する(ステップ1918)。一方、前者が後者を含んでいなければ、図16のステップ1601以降の動作を繰り返して再測定を行う(ステップ1917)。
【0114】
なお、図16のステップ1607〜1609において、目標検出装置S1 およびS2 をバイスタティックレーダとして動作させる代わりに、図4に示したように監視領域を空間分割して、N個の目標T1 〜TN の座標を求めてもかまわない。
【0115】
(付記1) 目標を検出するための送信信号を生成し、受信信号から該目標の距離情報を抽出する送受信手段と、
それぞれ異なる角度範囲に向けて前記送信信号を送信し、前記目標により反射された信号を受信して、受信信号を前記送受信手段に転送する複数のセンサ手段と、
前記送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替えるスイッチ手段と
を備えることを特徴とする目標検出装置。
(付記2) 光学系センサ手段をさらに備え、通常は前記複数のセンサ手段が広角監視を行い、前記目標が緊急性の高い領域へ侵入することが予測される場合に、該光学系センサ手段が該目標を検出することを特徴とする付記1記載の目標検出装置。
(付記3) それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
それぞれ異なる角度範囲に向けて第2の送信信号を送信し、前記目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
前記目標の位置が、前記第1の目標検出装置により前記第1の距離情報が抽出されたときの第1の角度範囲と、前記第2の目標検出装置により前記第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、該第1の距離情報および第2の距離情報から該目標の位置を計算する処理手段と
を備えることを特徴とする目標検出システム。
(付記4) 前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該第1の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第1の目標検出装置は、前記共通する領域が走査されたタイムスロットにおける受信信号から前記第1の距離情報を抽出し、該第2の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第2の目標検出装置は、該共通する領域が走査されたタイムスロットにおける受信信号から前記第2の距離情報を抽出することを特徴とする付記3記載の目標検出システム。
(付記5) 前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該監視領域は、該第1の目標検出装置が有する複数のセンサ手段の角度範囲と、該第2の目標検出装置が有する複数のセンサ手段の角度範囲とにより、複数の排他領域に分割され、前記処理手段は、前記第1の角度範囲に含まれる各排他領域の符号と、前記第2の角度範囲に含まれる各排他領域の符号とを比較し、両方の角度範囲に共通する符号から前記共通する領域を特定することを特徴とする付記3記載の目標検出システム。
(付記6) 前記第1の目標検出装置は、前記第1の送信信号を生成し、受信信号から前記第1の距離情報を抽出する第1の送受信手段と、該第1の送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替える第1のスイッチ手段をさらに有し、前記第2の目標検出装置は、前記第2の送信信号を生成し、受信信号から前記第2の距離情報を抽出する第2の送受信手段と、該第2の送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替える第2のスイッチ手段をさらに有することを特徴とする付記3記載の目標検出システム。
(付記7) 第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該第1の目標検出装置を送信機とし該第2の目標検出装置を受信機とするバイスタティックモードで該第1の目標検出装置と第2の目標検出装置を動作させて、該送信機から各目標を経由して該受信機に至る総合伝搬距離情報を各目標について取得し、該第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、該複数の目標の位置を特定する処理手段と
を備えることを特徴とする目標検出システム。
(付記8) 光学系センサ手段をさらに備え、通常は前記第1の目標検出装置と第2の目標検出装置が広角監視を行い、前記目標が緊急性の高い領域へ侵入することが予測される場合に、該光学系センサ手段が該目標を検出することを特徴とする付記3または7記載の目標検出システム。
(付記9) レーザ光を変調して光信号を生成し、該光信号を前記第1の目標検出装置と第2の目標検出装置に分配するレーザ光源手段をさらに備え、該第1の目標検出装置と第2の目標検出装置は、光検出器により該光信号を前記第1の送信信号および第2の送信信号にそれぞれ変換することを特徴とする付記3、7、または8記載の目標検出システム。
(付記10) 第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置を動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該複数の目標に対する第1の距離情報の最小値および最大値と、該複数の目標に対する第2の距離情報の最小値および最大値をそれぞれ半径とする4つの円の方程式から交点の座標を求め、該交点の座標を用いて該複数の目標の存在範囲を特定する処理手段と
を備えることを特徴とする目標検出システム。
(付記11) 前記処理手段は、前記4つの円の方程式の一部が解を持たないとき、該一部の方程式を定める半径の組み合わせを変更して交点の座標を再計算し、得られた交点の座標を用いて前記複数の目標の存在範囲を特定することを特徴とする付記10記載の目標検出システム。
【符号の説明】
【0116】
11、12、13、14、15、16 レーザ装置
21、22、23、31、32 検出装置
24、25、26、27、28、29、41、42、43、44 円弧
61、62、63、64 ピーク
101 送受信手段
102−1、102−2、102−m センサ手段
103 スイッチ手段
200 送受信部
201、202 二極双投スイッチ
203、204、208、1242、1252、1408、1507 分岐部
205、1245、1255、1404、1503 低雑音増幅器
206、1244、1254、1405、1504 ミキサ
207、1243、1253、1407、1506 高出力増幅器
209、1222、1304、1409、1508 無線周波数発振器
210、1221、1305、1410、1509 ベースバンド発振器
401 処理部
402 共通領域
601、602、603、604、605、A1、A2、A3、A4 アンテナ
606 双方向性スイッチ
1201 レーザ光源
1202 光アイソレータ
1203 光バンドパスフィルタ
1204 スプリッタ
1205 遅延器
1206 レーザ検出部
1207、1210 レーダ送受信部
1208、1211、1406、1505 送信アンテナ
1209、1212、1401、1402、1501−1、1501−2、1501−N 受信アンテナ
1223、1301 分布帰還型レーザ
1231 基準ミラー
1232 ハーフミラー
1233 レンズ
1234、1241、1251 光検出器
1302 マッハツェンダ変調器
1303 ファブリペロレーザ
1403 単極双投スイッチ
1502 単極N投スイッチ
1701、1702、1703、1711、1712、1713、1801、1802、1803、1811、1812、1813 円
1721、1722、1723、1724、1821、1822、1823 交点
S1 、S2 目標検出装置
SR11、SR12、SR13、SR21、SR22、SR23 角度範囲
T、T1 、T2 、T3 目標
【技術分野】
【0001】
本発明は、監視領域内に侵入した人、動物、物体等の目標を検出する装置およびシステムに関する。
【背景技術】
【0002】
図20に示すように、所定の監視領域内に不特定多数の目標Tが侵入してきた場合、これを検出するために、従来より、カメラやレーザ、あるいはモノパルスレーダ等が用いられている。目標Tの位置は、例えば、デカルト座標(直交座標)では(x,y)で表され、極座標では(r,θ)で表される。
【0003】
ところが、レーザ等の光学系の検出装置は、一般にビーム幅が極めて狭いため、ピンポイント検知が可能な反面、複数の目標を検出するためには、図21に示すように、多数の検出装置を配置しなければならないという問題がある。図21の例では、監視領域の周りに6台のレーザ装置11〜16が設置されており、装置間でレーザ光を照射して目標T1 およびT2 を検知する。
【0004】
また、たとえスキャン機構を備えた検出装置を用いたとしても、取り分け交差点や踏み切り等の暴露環境においては、蜘蛛の巣や埃等による光学部品の汚れがその検出能力を大幅に低下させるので、頻繁なメンテナンスが欠かせない。さらに、時刻による周辺環境の光学的特性の変化も、性能を保証する上で大きな問題となる。
【0005】
一方、レーダ等の電波系の検出装置は、耐環境性の面では有利である反面、一般に極座標上の点として目標の定位を行うため、性能上の問題が生じる。例えば、モノパルスレーダ装置では装置当たりの測角範囲は比較的広いものの、単一目標の角度しか得られない。また、アレイアンテナを用いたレーダ装置では、複数の目標の角度を計算できるものの、装置当たりの測角範囲が狭く、かつ、大きな信号処理コストを要する。
【0006】
また、単純に複数のレーダ装置を用いて目標の視線距離情報のみを測定し、得られた情報を用いて円の方程式の組み合わせを解き、目標の直交座標上での位置を計算するという方法も考えられる。距離情報のみから三角測量により目標を一意的に定位する場合、監視領域が方形であれば、例えば図22に示すように、監視領域の周りの異なる3点にπ/2(90度)の測角範囲を持つ検出装置を配置する必要がある。したがって、少なくとも3台以上の検出装置が必要となる。
【0007】
図22の例では、監視領域の3頂点に検出装置21〜23がそれぞれ設置されており、三角測量により目標T1 およびT2 の位置を特定する。各検出装置から見たとき、目標T1 およびT2 はそれぞれ以下の円弧上に存在する。
1.検出装置21 T1 :円弧24 T2 :円弧25
2.検出装置22 T1 :円弧26 T2 :円弧27
3.検出装置23 T1 :円弧28 T2 :円弧29
【0008】
ところが、現状のモノパルスレーダ装置1台当たりの測角範囲は高々π/6(30度)程度であるから、この構成で複数の目標を一意的に定位するためには、各検出装置を3台のレーダ装置で構成する必要があり、全体では少なくとも9台以上のレーダ装置が必要となる。
【0009】
下記の特許文献1は、スペクトラム拡散方式のレーダを用いて所定エリア内の被監視物体を検知する方法に関する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−257919号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上述した従来の目標検出装置には、次のような問題がある。
(1)レーザ等の光学系の検出装置は、外部環境の影響を受けやすく、屋外に設置した場合には、その性能を保証するのが困難である。また、複数の目標を検出するためには、多数の検出装置を配置しなければならない。
(2)モノパルスレーダ装置は、1台で1つの目標を検知するのが原則であり、多数の目標を検知し、角度情報と距離情報とで各目標を定位するためには、目標数と同じ数のレーダ装置を設置しなければならない。また、3台のモノパルスレーダ装置を1組として、監視領域の周りの3点に1組ずつ配置し、距離情報のみを用いて三角測量で目標の位置を算出する方法も考えられるが、レーダ装置を構成する部品が高価であるため、可能な限り少ない台数で広範囲な測角を実現することが望ましい。
【0012】
そこで、レーダ装置の台数を削減するために、例えば、図23に示すように、各々3台のレーダ装置からなる検出装置31および32を2点に設置して、目標の定位を行うことができるかどうかを考えてみる。各検出装置から見たとき、真の目標T1 およびT2 はそれぞれ以下の円弧上に存在する。
1.検出装置31 T1 :円弧41 T2 :円弧42
2.検出装置32 T1 :円弧43 T2 :円弧44
【0013】
検出装置31からT1 /T2 までの距離をそれぞれr11/r12とし、検出装置32からT1 /T2 までの距離をそれぞれr21/r22とすると、T1 (r11,r21)およびT2 (r12,r22)のように測定距離の正しいペアリングを行えば、各目標の座標が簡単な円の連立方程式から決定される。しかし、誤ったペアリングを行うと、虚像51および52の座標が算出されてしまう。
【0014】
今、このシステムで目標T1 およびT2 の視線距離を測定したところ、図24のような結果が得られたとする。図24において、横軸は距離インデクスを表し、縦軸はベースバンド信号のパワーを表す。検出装置31におけるベースバンド信号には2つのピーク61および62が現れ、検出装置32におけるベースバンド信号には2つのピーク63および64が現れている。これらのピークの位置に対応する距離インデクスが、目標T1 およびT2 までの距離を示している。
【0015】
このとき、ピーク61および62の各々に対してピーク63または64を組み合わせることができるので、2通りの組み合わせが考えられ、監視領域内には合計4つの点の座標が求まる。つまり、目標T1 およびT2 と虚像51および52の座標である。
【0016】
円の連立方程式の解の個数は目標の個数の2乗に比例して増加するので、2台の検出装置では目標数が増加するほど、検出誤りを取り除くために多くの計算コストが必要となり、台数を減らせば即応性に問題が生じる。
(3)多数の目標が監視領域内に侵入してきた場合、これらを正確に判別するには、各目標の位置を、直交座標若しくは極座標上の点としてローカライズするのが望ましい。しかしながら、従来の検出装置では、光学系にしろレーダ系にしろ、このような多数目標の判別処理を自律測位計のみを用いて所望の時間内に行うのは、非常に困難である。
【0017】
本発明の第1の課題は、屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供することである。
【0018】
本発明の第2の課題は、監視領域内に侵入した複数の目標を高精度かつ高速に検出することである。
【課題を解決するための手段】
【0019】
図1は、本発明の目標検出装置の原理図である。図1の目標検出装置は、送受信手段101、センサ手段102−1〜102−m、およびスイッチ手段103を備える。送受信手段101は、目標を検出するための送信信号を生成し、受信信号から目標の距離情報を抽出する。センサ手段102−1〜102−mは、それぞれ異なる角度範囲に向けて送信信号を送信し、目標により反射された信号を受信して、受信信号を送受信手段101に転送する。スイッチ手段103は、送受信手段101とセンサ手段102−1〜102−mの間の接続を、時分割で切り替える。
【0020】
センサ手段102−1〜102−mとしては、例えば、レーダ信号を送受信するアンテナや音波を送受信する音波センサが用いられる。これらのセンサ手段102−1〜102−mと、信号処理を行う送受信手段101とをスイッチ手段103で時分割的に接続することにより、単一の送受信手段101をセンサ手段102−1〜102−mで共用することが可能になる。したがって、信号処理用部品の総数を抑えた安価な構成で、広い監視領域をカバーすることができる。
【0021】
送受信手段101は、例えば、図2の送受信部200、無線周波数発振器209、およびベースバンド発振器210に対応し、センサ手段102−1〜102−mは、例えば、図2のアンテナA1〜A4または図6のアンテナ601〜605に対応する。スイッチ手段103は、例えば、図2の二極双投(DPDT)スイッチ201、202または図6の双方向性スイッチ606に対応する。
【0022】
また、本発明の第1および第2の目標検出システムはともに、第1および第2の目標検出装置と処理手段を備える。
【0023】
第1の目標検出システムにおいて、第1の目標検出装置は、それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から目標の第1の距離情報を抽出する。第2の目標検出装置は、それぞれ異なる角度範囲に向けて第2の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から目標の第2の距離情報を抽出する。
【0024】
処理手段は、目標の位置が、第1の目標検出装置により第1の距離情報が抽出されたときの第1の角度範囲と、第2の目標検出装置により第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、第1の距離情報および第2の距離情報から目標の位置を計算する。
【0025】
2台の目標検出装置のみを用いて目標の定位を行えば、3台の目標検出装置を用いる場合に比べて装置コストが確実に低下する。また、第1および第2の目標検出装置がセンサ手段をそれぞれ複数個備えることで、各装置の側角範囲が複数の角度範囲に分割される。したがって、2台の目標検出装置が同一の目標を捉えたとき、それぞれの角度範囲に共通する領域内にその位置を限定することが可能になる。これにより、その共通領域内の真の目標と、共通領域に含まれない虚像とを区別することができ、目標の誤検出の可能性が低下する。
【0026】
第2の目標検出システムにおいて、第1の目標検出装置は、第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から目標の第1の距離情報を抽出する。第2の目標検出装置は、第2の送信信号を送信し、目標により反射された信号を受信して、受信信号から目標の第2の距離情報を抽出する。
【0027】
処理手段は、複数の目標に対して第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、第1の目標検出装置から各目標までの第1の距離情報と、第2の目標検出装置から各目標までの第2の距離情報を取得する。また、第1の目標検出装置を送信機とし第2の目標検出装置を受信機とするバイスタティックモードで第1の目標検出装置と第2の目標検出装置を動作させて、送信機から各目標を経由して受信機に至る総合伝搬距離情報を各目標について取得する。そして、第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、複数の目標の位置を特定する。
【0028】
第1の目標検出システムと同様に、2台の目標検出装置のみを用いて目標の定位を行えば、3台の目標検出装置を用いる場合に比べて装置コストが低下する。また、バイスタティックモードの計測を行って、第1の目標検出装置から各目標を経由して第2の目標検出装置に至る総合伝搬距離情報を取得することで、各装置から各目標までの距離情報以外に、目標に関する付加的な距離情報が得られる。
【0029】
複数の目標のそれぞれについて第1および第2の距離情報が得られた場合、ある目標についての第1および第2の距離情報の組み合わせが正しければ、それらの和はその目標についての総合伝搬距離情報と一致するはずである。したがって、第1および第2の距離情報の和を総合伝搬距離情報と比較することで、第1および第2の距離情報の組み合わせが正しいか否かを判定することができる。そして、正しい組み合わせを用いて各目標の位置を特定することで、目標の誤検出の可能性が低下する。
【発明の効果】
【0030】
本発明によれば、部品点数を抑えた安価な構成の目標検出装置またはシステムにより、広い監視領域をカバーすることができる。
【0031】
また、監視領域の周りの異なる2点のみに目標検出装置を配置した場合でも、虚像による目標の誤検出を簡単な処理により排除し、複数の目標を高精度かつ高速に検出することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の目標検出装置の原理図である。
【図2】目標検出装置の構成図である。
【図3】第1の動作タイミングチャートである。
【図4】監視領域の分割方法を示す図である。
【図5】第2の動作タイミングチャートである。
【図6】5つのアンテナを用いた構成を示す図である。
【図7】第1の測位方法のフローチャートである。
【図8】一般的な測位方法を示す図である。
【図9】モノスタティックモードの動作を示す図である。
【図10】バイスタティックモードの動作を示す図である。
【図11】第2の測位方法のフローチャートである。
【図12】ハイブリッドシステムの構成図である。
【図13】間接変調のレーザ光源を示す図である。
【図14】モノパルスレーダ装置の構成図である。
【図15】アレイレーダ装置の構成図である。
【図16】第3の測位方法のフローチャートである。
【図17】3つの目標の第1の存在範囲を示す図である。
【図18】3つの目標の第2の存在範囲を示す図である。
【図19】N個の目標の定位処理のフローチャートである。
【図20】監視領域と目標を示す図である。
【図21】レーザ装置の配置を示す図である。
【図22】レーダ装置による三角測量を示す図である。
【図23】三角測量における虚像を示す図である。
【図24】ベースバンド信号のピーク位置を示す図である。
【発明を実施するための形態】
【0033】
以下、図面を参照しながら、本発明を実施するための最良の形態を詳細に説明する。
本実施形態においては、監視領域の周りの適当な箇所に2台以上の目標検出装置を設置し、これらを協調的に動作させて三角測量により目標の定位を行う。精度を向上させるためには、3台以上の目標検出装置を用いるのが望ましいが、以下では2台を用いた場合について、システムの各実装レベル毎に詳細を述べる。
【0034】
まず、装置の回路構成について説明する。図2は、レーダを用いた場合の目標検出装置の構成例を示している。図2の目標検出装置は、送受信共用のアンテナA1〜A4、二極双投(DPDT)スイッチ201、202、分岐部(HYB)203、204、208、低雑音増幅器205、ミキサ206、高出力増幅器207、無線周波数発振器209、およびベースバンド発振器210を備える。このうち、低雑音増幅器205、ミキサ206、高出力増幅器207、および分岐部208は、送受信部200に含まれる。
【0035】
ベースバンド発振器210は、三角波を生成して無線周波数発振器209に出力する。無線周波数発振器209は、例えば、電圧制御発振器であり、三角波により周波数変調された送信信号を生成する。分岐部208は、その送信信号を高出力増幅器207とミキサ206に出力し、高出力増幅器207は、送信信号を増幅し、分岐部204は、増幅された送信信号をスイッチ201および202に出力する。
【0036】
スイッチ201は、分岐部204からの送信信号をアンテナA3またはA4のいずれかに選択的に出力する機能と、アンテナA3またはA4のいずれかからの受信信号を選択して分岐部203に出力する機能とを有する。同様に、スイッチ202は、分岐部204からの送信信号をアンテナA1またはA2のいずれかに選択的に出力する機能と、アンテナA1またはA2のいずれかからの受信信号を選択して分岐部203に出力する機能とを有する。
【0037】
こうして、アンテナA1〜A4のいずれかから送信された信号は、監視領域内の目標により反射されて、そのアンテナにより受信される。分岐部203は、スイッチ201または202からの受信信号を低雑音増幅器205に出力し、低雑音増幅器205は、受信信号を増幅する。そして、ミキサ206は、増幅された受信信号と送信信号の一部をミキシングすることで、目標の距離情報および速度情報を含んだベースバンド(BB)信号を生成する。
【0038】
レーダ装置の場合、システム構成上最も高価な部品は無線周波数回路であるから、送受信部200、無線周波数発振器209、およびベースバンド発振器210を複数のアンテナA1〜A4で共用している。また、アンテナ総数を減らして、装置開口当たりのユニットアンテナの利得を向上させるため、双方向性スイッチ201および202を用いて、アンテナA1〜A4と送受信部200を接続し、必要な測角範囲を時分割でカバーする。
【0039】
この例では4個のアンテナを用いているので、隣接する2個のアンテナ(送受信各1個)を測位に利用する場合には測角範囲は3分割され、隣接する3個のアンテナ(送信に1個、受信に2個等)を測位に利用する場合には測角範囲は2分割されることになる。
【0040】
送受信に各1個のアンテナを利用する場合の時分割動作は、例えば、図3に示すようになる。まず、タイムスロットt1では、アンテナA1が信号を送信し、アンテナA2が信号を受信する。次に、タイムスロットt2では、アンテナA2が信号を送信し、アンテナA3が信号を受信する。そして、タイムスロットt3では、アンテナA3が信号を送信し、アンテナA4が信号を受信する。タイムスロットt4〜t6でも同様の動作が行われる。なお、本構成例では例えば、双方向性スイッチ202は、タイムスロットt1に於いて分岐部204からアンテナA1へ向かう送信信号と、アンテナA2から分岐部203へ向かう受信信号とを、t1を細分した周期で適宜切り替えるものとする。
【0041】
このように、複数のアンテナと1つの送受信部を双方向性スイッチで時分割的に接続することにより、部品点数を抑えた安価な構成で全監視領域をカバーすることが可能になる。
【0042】
次に、監視領域の空間分割について説明する。図4に示すように、システムが監視すべき範囲を個々のアンテナの測角範囲に応じて適宜分割し、特定の時間帯において特定の領域の空間情報のみが、目標の座標を与える連立方程式の拘束条件として有効となるようにする。そして、有効な方程式の組み合わせから目標の位置を算出する。これにより、2台の目標検出装置を用いた場合の虚像の問題が解消される確率が高くなる。
【0043】
図4の例では、監視領域の2頂点に目標検出装置S1 およびS2 が配置され、各々のπ/2の測角範囲をSR11〜SR13またはSR21〜SR23の3領域に分割して監視する。したがって、全監視領域はSR11〜SR13∩SR21〜SR23の9個の擬似排他領域に分割される。
【0044】
処理部401は、目標検出装置S1 およびS2 に接続され、高速フーリエ変換部、CPU(中央処理装置)、メモリ等を含む。メモリには、監視領域の分割方法と各排他領域の位置および形状に関する情報が、あらかじめ格納されている。このうち、各排他領域の情報としては、領域内部の座標を表す不等式等が用いられる。
【0045】
処理部401は、目標検出装置S1 およびS2 の動作を制御するとともに、各目標検出装置から出力されるベースバンド信号の高速フーリエ変換を行って、目標の距離情報および速度情報を抽出する。そして、抽出された距離情報を用いて目標の位置を算出する。
【0046】
目標検出装置S1 およびS2 としては、例えば、図2に示した装置が用いられ、隣接する2個のアンテナが各角度範囲の計測を担当する。このとき、処理部401は、スイッチ201および202を所定のタイムスロット毎に切り替えることにより、アンテナA1〜A4の時分割動作を制御する。
【0047】
この場合の時分割動作は、例えば、図5に示すようになる。まず、タイムスロットt1では、目標検出装置S1 によりSR11の計測が行われ、続いてタイムスロットt2〜t4では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。次に、タイムスロットt5では、目標検出装置S1 によりSR12の計測が行われ、続いてタイムスロットt6〜t8では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。
【0048】
そして、タイムスロットt9では、目標検出装置S1 によりSR13の計測が行われ、続いてタイムスロットt10〜t12では、目標検出装置S2 によりSR21〜SR23の計測が順番に行われる。このような時分割動作が繰り返される。
【0049】
ところで、図4のような空間分割を行う場合、アンテナの数は必ずしも4個に限られるわけではない。例えば、図6に示すように、5個のアンテナ601〜605を用いた場合は、アンテナ601〜603がSR11をカバーし、アンテナ602〜604が角度範囲SR12をカバーし、アンテナ603〜605が角度範囲SR13をカバーする。これらのアンテナは、双方向性スイッチ606により送受信部200と接続される。スイッチ606としては、例えば、二極双投スイッチと二極三投(DP3T)スイッチの組み合わせが用いられる。
【0050】
次に、図4のような空間分割に基づく目標の測位アルゴリズムについて説明する。図4において、目標検出装置S1 の位置をxy座標系の原点(0,0)とし、横軸および縦軸をそれぞれx軸およびy軸とし、目標検出装置S2 の座標を(0,y0 )とする。
【0051】
また、目標検出装置S1 およびS2 を図5のタイミングチャートに従って動作させ、目標検出装置S1 により測定された目標T1 /T2 までの視線距離をそれぞれr11/r12とし、目標検出装置S2 により測定された目標T1 /T2 までの視線距離をそれぞれr21/r22とする。
【0052】
さらに、目標T1 /T2 の座標を(x1 ,y1 )/(x2 ,y2 )とすると、円の連立方程式として次の4式が得られる。
【0053】
【数1】
SR12とSR21の共通領域402(SR12∩SR21)がアクティブになる時間帯(タイムスロットt5およびt6)にデータ測定が行われたものとすると、有効な方程式の組は、距離の範囲から明らかに(2)式と(4)式であり、次式によって一意的にT2 の座標が決定される。
【0054】
【数2】
図7は、この場合の目標T2 の測位方法のフローチャート例である。まず、処理部401は、目標検出装置S1 にSR12の範囲を計測させ、目標T2 の視線距離r12を取得する(ステップ701)。次に、目標検出装置S2 にSR21〜SR23の範囲を順番に計測させ、SR21の範囲で目標T2 の視線距離r22を取得する(ステップ702)。
【0055】
次に、あらかじめメモリ内に格納された領域402に関する情報を参照し、円の連立方程式を解いてT2 の座標を求める(ステップ703)。このとき、2つの円の交点として2点の座標が得られるため、各点について領域402に含まれるか否かを検証する(ステップ704)。
【0056】
そして、領域402に含まれる点をT2 の位置に決定し、r12およびr22を円の連立方程式の適用対象から除外する(ステップ706)。一方、領域402に含まれない点については、クラッタとして破棄する(ステップ705)。
【0057】
このように、各タイムスロットにおいて計測対象となる排他領域の空間情報を与えて円の連立方程式を解けば、他の目標からの影響を受けるものの、方程式の組み合わせの曖昧さに起因する虚像の検出確率が低くなり、目標の座標が一意的に定まる確率が高くなる。
【0058】
監視領域の空間分割は、時間だけでなく、周波数あるいは符号に基づいて実施してもよい。例えば、コード分割の場合は、各排他領域に固有の符号を付加しておき、SR11〜SR13およびSR21〜SR23のそれぞれの角度範囲に対して、その範囲に含まれる複数の排他領域の符号を割り当てる。そして、S1 およびS2 が計測した角度範囲の両方に割り当てられた符号により、目標が存在する排他領域を特定する。
【0059】
上述の例では、簡単のため、目標検出装置S1 およびS2 の座標を特殊な値に設定しているが、図8に示すように、これらが任意の位置O1 (x01,y01)およびO2 (x02,y02)に設置された場合でも、目標までの視線距離の情報のみから円の交点I1 (x1 ,y1 )およびI2 (x2 ,y2 )を算出することが可能である。
【0060】
図8において、O1 およびO2 を通る直線とI1 およびI2 を通る直線の交点R1 の座標を(xR ,yR )とし、各点間の距離をそれぞれO1 −O2 :d、O1 −I1 :r1 、O1 −R1 :s、O2 −I1 :r2 、I1 −R1 (=I2 −R1 ):t、R2 −I2 :dx、R2 −R1 :dyとする。このとき、真の目標または虚像のいずれかに対応する2点I1 およびI2 の座標は、次式により求められる。なお、R2 はR1 からy軸に平行に下ろした直線とI2 からx軸に平行に引いた直線との交点であり、またR3 はO2 からy軸に平行に下ろした直線とO1 からx軸に平行に引いた直線との交点である。
【0061】
【数3】
なお、監視領域の空間分割の方法は、図4のような9分割に限定されるものではなく、目標検出装置S1 およびS2 の構成に応じて適切な分割方法が採用される。
【0062】
次に、同期測位の方法について説明する。この測位方法では、まず、図9に示すように、モノスタティックモードにおいて、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、目標T1 /T2 までの視線距離r11/r12およびr21/r22の測定を行う。
【0063】
次に、図10に示すように、バイスタティックモードにおいて、互いに離れた位置にある目標検出装置S1 およびS2 で送受信系を構成し、バイスタティックレーダとして動作させる。例えば、S1 からの送信信号がT1 /T2 によってバイスタティック反射された成分をS2 によって測定し、S1 →T1 →S2 およびS1 →T2 →S2 の各経路の総合伝搬距離であるr112 (=r11+r21)およびr122 (=r12+r22)を測定する。もちろん、S1 とS2 の役割を入れ替えて、逆の伝搬順序で測定してもかまわない。
【0064】
最後に、上述した円の方程式の組から計算された監視領域内のT1 /T2 の座標(2つの虚像を含む4点の座標)を用いて4つの総合伝搬距離を計算し、これらをr112 (=r11+r21)およびr122 (=r12+r22)の測定値と比較すれば、T1 /T2 の正しい座標が求められる。例えば、T1 の正しい座標は、(1)式と(3)式の組から計算されたものであることが簡単に分かる。
【0065】
このとき、例えば、次式のような距離の差分の絶対値を目的関数として用いた最適化処理を行って、各目標の座標を求めてもよい。各目標の座標の初期値は、(1)式〜(4)式を適当に組み合わせて計算することができる。
【0066】
【数4】
このように、モノスタティックモードとバイスタティックモードで得られた情報を組み合わせることで、正確な目標の座標を決定することができる。
【0067】
図11は、同期測位を用いた目標T1 およびT2 の測位方法のフローチャートである。まず、処理部401は、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、視線距離r11、r12、r21、およびr22を取得する(ステップ1101)。ただし、この段階では、r11およびr12のいずれが目標T1 までの正しい距離であるかは確定しておらず、同様に、r21およびr22のいずれが目標T2 までの正しい距離であるかは確定していないものとする。
【0068】
次に、S1 を送信機、S2 を受信機とするバイスタティックレーダとして動作させ、S1 →T1 →S2 およびS1 →T2 →S2 の総合伝搬距離r112 およびr122 を取得する(ステップ1102)。
【0069】
次に、円の連立方程式を用いて目標T1 の位置を計算するために、暫定的な半径の組み合わせを決定する(ステップ1103)。ここでは、例えば、r11とr21が暫定的な組み合わせとして決定される。
【0070】
次に、微小な閾値εを用いて、以下の2つの不等式が満たされるか否かをチェックする(ステップ1104)。
【0071】
|(r11+r21)−r112 |<ε & |(r12+r22)−r122 |<ε (9)
【0072】
これらの不等式が満たされれば、目標T1 の座標をr11とr21の組み合わせから計算し、目標T2 の座標をr12とr22の組み合わせから計算する(ステップ1106)。いずれかの不等式が満たされなければ、目標T1 の座標をr11とr22の組み合わせから計算し、目標T2 の座標をr12とr21の組み合わせから計算する(ステップ1105)。
【0073】
そして、計算された目標T1 およびT2 の座標が有効な値か否かをチェックする(ステップ1107)。ここでは、例えば監視領域が一辺y0の正方形である場合、x座標およびy座標がともに区間[0,y0]内の正の実数であれば有効と判定され、それ以外の値であれば無効と判定される。目標T1 およびT2 の座標が有効な値であれば測位を終了し(ステップ1108)、そうでなければステップ1101以降の動作を繰り返して再測定を行う。なお、例えば安全性を重視するアプリケーションでは、事前に設定した適当な回数だけ再測定を行っても妥当な値が得られない場合、例えば、モノスタティック測定の結果のみを用い、監視領域内に現れる全ての点の座標を実在する目標点として処理する(安全性があまり問題でないアプリケーションでは、クラッタとして処理することもあり得る)。
【0074】
次に、レーザやカメラ等の光学系センサとライダ/レーダ装置を用いた混合測位の方法について説明する。前述したように、侵入者のピンポイント検出という観点からは、レーダよりレーザの方が優れている場合がある。そこで、普段はレーダを用いて広角監視モードで広い範囲を監視しておき、時間的な意味も含めて緊急性の高い領域への侵入が予想された場合、侵入者を確実に検出するためにレーザを用いる、というハイブリッドシステムが考えられる。
【0075】
このシステムでは、単一のレーザ光源を適切な信号源を用いて直接または間接的に変調し、変調された光信号をそのまま各装置へ分配し、各装置内で光検出器等を用いて、レーダ信号として必要な同期の取れた源振を回復する。
【0076】
図12は、このようなハイブリッドシステムの構成例を示している。このシステムは、レーザ光源1201、光アイソレータ1202、光バンドパスフィルタ1203、スプリッタ1204、遅延器1205、レーザ検出部1206、レーダ送受信部1207、1210、送信アンテナ1208、1211、および受信アンテナ1209、1212を備える。スプリッタ1204と遅延器1205、遅延器1205とレーダ送受信部1207、スプリッタ1204とレーダ送受信部1210は、それぞれ位相安定化光ファイバで接続されている。
【0077】
レーザ光源1201は、ベースバンド発振器1221、無線周波数発振器1222、および分布帰還型レーザ1223を含む。分布帰還型レーザ1223の出力光は、ベースバンド発振器1221および無線周波数発振器1222により生成された送信信号により直接変調され、光信号として出力される。この光信号は、光アイソレータ1202および光バンドパスフィルタ1203を経由して、スプリッタ1204により3つに分岐する。
【0078】
1番目の光信号はレーザ検出部1206に転送され、2番目の光信号は遅延器1205を経由してレーダ送受信部1207に転送され、3番目の光信号はレーダ送受信部1210に転送される。遅延器1205の遅延量τは、レーダ送受信部1207とレーダ送受信部1210への光信号の到達時間が同じになるように設定される。
【0079】
レーザ検出部1206は、基準ミラー1231、ハーフミラー1232、レンズ1233、および光検出器(PD)1234を含み、レーザ光源1201から転送された光を、ハーフミラー1232およびレンズ1233を介して監視領域に照射する。そして、目標からの反射光をレンズ1233およびハーフミラー1232を介して、光検出器1234により検出する。
【0080】
レーザ検出部1206の別の構成例としては、ガルバノミラー型光スキャナと光検出器アレイの組み合わせも考えられる。
【0081】
レーダ送受信部1207は、光検出器1241、分岐部(HYB)1242、高出力増幅器1243、ミキサ1244、および低雑音増幅器1245を含み、レーダ送受信部1210は、光検出器1251、分岐部1252、高出力増幅器1253、ミキサ1254、および低雑音増幅器1255を含む。各レーダ送受信部は、レーザ光源1201から転送された光信号を、光検出器により送信信号に変換して、図2の送受信部200と同様の動作を行う。
【0082】
例えば、レーダ送受信部1207、送信アンテナ1208、および受信アンテナ1209は、図4の目標検出装置S1 として用いられ、レーダ送受信部1210、送信アンテナ1211、および受信アンテナ1212は、図4の目標検出装置S2 として用いられる。
【0083】
このシステムでは、単一のレーザ光源1201を源振として2つのレーダ装置に用いる電磁波が生成される。したがって、図10のバイスタティックモードにおいて、例えば、S1 →T1 →S2 なる経路で総合伝搬距離を測定する際に、S1 とS2 のローカル光源のコヒーレンスを高めることができ、測定精度が向上する。
【0084】
これらのレーダ装置のアンテナ部分の構成としては、図2に示した送受信共用の複数のアンテナを用いることも可能である。
【0085】
図13は、図12のレーザ光源1201の別の構成例を示している。このレーザ光源は、分布帰還型レーザ1301、マッハツェンダ変調器(MZM)1302、ファブリペロ(FP)レーザ1303、無線周波数発振器1304、およびベースバンド発振器1305を含む。マッハツェンダ変調器1302は、分布帰還型レーザ1301の出力光を、ベースバンド発振器1305および無線周波数発振器1304により生成された送信信号により間接的に変調する。マッハツェンダ変調器1302からの光は、ファブリペロレーザ1303を介して外部に出力される。
【0086】
また、ピンポイント検出性よりも証拠保全性を重視する場合は、上記ハイブリッドシステムにおいて、レーザの代わりにカメラを用いることが望ましい。この場合、普段はレーダを用いて広角監視モードで監視を行い、緊急性の高い領域への侵入が予想された場合、証拠を残すためにカメラで侵入者を撮像する。これは、例えば監視領域を物理的に仕切るための何らかの装置、機構を監視時間中に損壊して突破するような目標の特定等にも用いられる。
【0087】
ところで、上述した実施形態では、目標検出装置S1 およびS2 として、図2または図12の回路構成のレーダ装置を採用しているが、他の回路構成を採用することも、もちろん可能である。例えば、図14に示すモノパルスレーダ装置や図15に示すアレイレーダ装置を目標検出装置として採用することができる。
【0088】
図14のモノパルスレーダ装置は、受信アンテナ1401、1402、単極双投(SPDT)スイッチ1403、低雑音増幅器1404、ミキサ1405、送信アンテナ1406、高出力増幅器1407、分岐部(HYB)1408、無線周波数発振器1409、およびベースバンド発振器1410を備える。このモノパルスレーダ装置は、広い測角範囲を有するが、単一の目標の角度しか測定することができない。
【0089】
図15のアレイレーダ装置は、N個の受信アンテナ1501−1〜1501−N、単極N投(SPNT)スイッチ1502、低雑音増幅器1503、ミキサ1504、送信アンテナ1505、高出力増幅器1506、分岐部(HYB)1507、無線周波数発振器1508、およびベースバンド発振器1509を備える。このアレイレーダ装置は、受信アンテナ1501−1〜1501−Nからなるアレイアンテナにより、多数の目標を測位することができるが、その測角範囲は一般に狭い。
【0090】
図4に示した空間分割を採用する場合は、目標検出装置S1 およびS2 として、それぞれ3台のモノパルスレーダ装置またはアレイレーダ装置を設置することが望ましい。この場合も、監視領域の空間分割は、時間、周波数、符号等に基づいて実施される。
【0091】
さらに、目標検出装置としては、レーダ装置の代わりにソナー装置等の他の装置を用いることも可能である。例えば、図2の目標検出装置としてソナー装置を用いた場合は、アンテナA1〜A4を、音波を送受信する音波センサ(圧電素子)に置き換え、無線周波数発振器209をソナー用発振器に置き換えればよい。
【0092】
同様に、図12のレーダ装置の代わりにソナー装置を用いた場合は、送信アンテナ1208、1211および受信アンテナ1209、1212を音波センサに置き換え、無線周波数発振器1222をソナー用発振器に置き換えればよい。
【0093】
また、図4、図9、および図10のシステムにおいて目標検出装置を3台以上配置した場合でも、処理部401は、適当な2台の目標検出装置を組み合わせて、同様のアルゴリズムにより測位を行うことができる。
【0094】
次に、監視領域内にN個の目標T1 〜TN が存在する場合の測位方法について説明する。例えば、図9および図10に示した2台の目標検出システムを用いた測位方法のフローチャートは、図16のようになる。
【0095】
まず、処理部401は、目標検出装置S1 およびS2 を通常のモノスタティックレーダとして動作させ、S1 からT1 〜TN までの視線距離r11〜r1Nと、S2 からT1 〜TN までの視線距離r21〜r2Nを取得する(ステップ1601)。そして、目標数Nが処理部401の性能により処理可能な個数か否かを判定する(ステップ1602)。処理可能な個数の上限は、あらかじめメモリに格納されているものとする。
【0096】
目標数Nが処理可能な個数であれば、次に、S1 を送信機、S2 を受信機とするバイスタティックレーダとして動作させ、N個の経路S1 →T1 →S2 〜S1 →TN →S2 の総合伝搬距離r112 〜r1N2 を取得する(ステップ1607)。そして、得られたr112 〜r1N2 がすべて異なる値か否かをチェックする(ステップ1608)。
【0097】
r112 〜r1N2 がすべて異なる値であれば、それらの値を用いて目標T1 〜TN の座標を計算し(ステップ1609)、測位を終了する(ステップ1610)。
【0098】
ステップ1602において、目標数Nが処理可能な個数を超えていれば、視線距離r11〜r1Nおよびr21〜r2Nをそれぞれ大きさの昇順にソートし、小さいものから順に改めて符号r11〜r1Nおよびr21〜r2Nを付与する(ステップ1603)。これにより、S1 からの視線距離の最小値r1minはr11となり、最大値r1maxはr1Nとなる。同様に、S2 からの視線距離の最小値r2minはr21となり、最大値r2maxはr2Nとなる。
【0099】
次に、半径の組み合わせが(r1min,r2min)、(r1min,r2max)、(r1max,r2min)、および(r1max,r2max)となる円の連立方程式を解いて、目標T1 〜TN が存在する領域を特定する(ステップ1604)。そして、すべての方程式が解を持ち、それらの解が監視領域内に存在するか否かをチェックし(ステップ1605)、そのような解が得られれば、測位を終了する(ステップ1610)。
【0100】
例えば、図17に示すように、監視領域内に3つの目標T1 〜T3 が存在する場合、ソート後の視線距離r11〜r13およびr21〜r23を半径とする円1701〜1703および1711〜1713のそれぞれに対して、円の方程式を想定することができる。このうち、半径の組み合わせが(r11,r21)、(r11,r23)、(r13,r21)、および(r13,r23)となる円の連立方程式を解くことで、4つの交点1721〜1724の座標が得られる。目標T1 〜T3 は、これらの交点に囲まれた領域に含まれている。そこで、例えば、これらの交点を頂点とする四角形の領域が、目標T1 〜T3 の存在範囲として特定される。
【0101】
ステップ1605において、一部の方程式が解を持たないか、または、解が監視領域内に存在しなければ、その方程式を定める半径の組み合わせを変更して、交点を計算し直す(ステップ1606)。そして、ステップ1605以降の処理を行う。
【0102】
例えば、図18に示すように、目標T1 〜T3 のソート後の視線距離r11〜r13およびr21〜r23を半径とする円1801〜1803および1811〜1813のそれぞれに対して、円の方程式を想定することができる。このうち、半径の組み合わせが(r11,r23)、(r13,r21)、および(r13,r23)となる円の連立方程式を解くことで、3つの交点1821〜1823の座標が得られる。
【0103】
ところが、半径の組み合わせが(r11,r21)となる円1801および1811は交点を持たないため、この組み合わせからは解が得られない。そこで、2番目に小さい視線距離r12およびr22を用いて、半径の組み合わせが(r11,r22)および(r12,r21)となる円の連立方程式を改めて解く。これにより、目標検出装置S1 およびS2 からの距離が最も近い交点である、目標T1 およびT3 の座標が得られる。この場合、例えば、交点1821〜1823とT1 およびT3 の位置を頂点とする多角形の領域が、目標T1 〜T3 の存在範囲として特定される。
【0104】
ステップ1608において、総合伝搬距離r112 〜r1N2 の一部が同じ値であれば、ステップ1603以降の処理を行う。
【0105】
このような測位方法によれば、監視領域内に多数の目標が侵入し、処理部401の性能上、所定時間内にすべての目標の定位が行えない場合でも、それらの目標の存在範囲を特定し、危険エリアとして認識することができる。
【0106】
図19は、図16のステップ1609における目標T1 〜TN の定位処理のフローチャートである。まず、処理部401は、視線距離r11〜r1Nおよびr21〜r2Nと総合伝搬距離r112 〜r1N2 をデータとしてメモリに格納し、制御変数mおよびnをそれぞれ0とおく(ステップ1901)。そして、mと目標数Nを比較する(ステップ1902)。
【0107】
mがNより小さければ、m=m+1とおき(ステップ1903)、続いてnとNとを比較する(ステップ1906)。
【0108】
nがNより小さければ、n=n+1とおき(ステップ1907)、微小な閾値εを用いて、以下の不等式が満たされるか否かをチェックする(ステップ1908)。
【0109】
|(r1m+r2n)−r1m2 |<ε (10)
【0110】
この不等式が満たされれば、半径の組み合わせが(r1m,r2n)となる円の連立方程式から目標Tm の座標を計算し(ステップ1911)、その座標が有効な値か否かをチェックする(ステップ1912)。目標Tm の座標が有効な値でなければ、その座標を無効座標としてメモリに格納して(ステップ1913)、ステップ1906以降の処理を繰り返す。一方、目標Tm の座標が有効な値であれば、その座標を有効座標としてメモリに格納して(ステップ1914)、ステップ1902以降の処理を繰り返す。また、ステップ1908において、不等式が満たされなければ、ステップ1906以降の処理を繰り返す。
【0111】
ステップ1906において、nがNに達していれば、次に、現在のmの値に対する有効座標が1≦n≦Nの範囲で得られたか否かをチェックする(ステップ1909)。そのような有効座標がメモリに格納されていれば、ステップ1902以降の処理を繰り返す。一方、そのような有効座標がメモリに格納されていなければ、現在のmの値に対する無効座標のうち監視領域の境界に最も近い座標を、目標Tm の無効座標としてメモリに格納し(ステップ1910)、ステップ1902以降の処理を繰り返す。
【0112】
ステップ1902において、mがNに達していれば、次に、1≦m≦Nの範囲のすべてのmについて有効座標が得られたか否かをチェックする(ステップ1915)。そして、すべての有効座標がメモリに格納されていれば、計算を終了する(ステップ1918)。
【0113】
いずれかのmについて無効座標がメモリに格納されていれば、有効座標により囲まれる領域が無効座標により囲まれる領域を含んでいるか否かをチェックする(ステップ1916)。前者が後者を含んでいれば、計算結果に警告情報を付加して(ステップ1919)、計算を終了する(ステップ1918)。一方、前者が後者を含んでいなければ、図16のステップ1601以降の動作を繰り返して再測定を行う(ステップ1917)。
【0114】
なお、図16のステップ1607〜1609において、目標検出装置S1 およびS2 をバイスタティックレーダとして動作させる代わりに、図4に示したように監視領域を空間分割して、N個の目標T1 〜TN の座標を求めてもかまわない。
【0115】
(付記1) 目標を検出するための送信信号を生成し、受信信号から該目標の距離情報を抽出する送受信手段と、
それぞれ異なる角度範囲に向けて前記送信信号を送信し、前記目標により反射された信号を受信して、受信信号を前記送受信手段に転送する複数のセンサ手段と、
前記送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替えるスイッチ手段と
を備えることを特徴とする目標検出装置。
(付記2) 光学系センサ手段をさらに備え、通常は前記複数のセンサ手段が広角監視を行い、前記目標が緊急性の高い領域へ侵入することが予測される場合に、該光学系センサ手段が該目標を検出することを特徴とする付記1記載の目標検出装置。
(付記3) それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
それぞれ異なる角度範囲に向けて第2の送信信号を送信し、前記目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
前記目標の位置が、前記第1の目標検出装置により前記第1の距離情報が抽出されたときの第1の角度範囲と、前記第2の目標検出装置により前記第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、該第1の距離情報および第2の距離情報から該目標の位置を計算する処理手段と
を備えることを特徴とする目標検出システム。
(付記4) 前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該第1の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第1の目標検出装置は、前記共通する領域が走査されたタイムスロットにおける受信信号から前記第1の距離情報を抽出し、該第2の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第2の目標検出装置は、該共通する領域が走査されたタイムスロットにおける受信信号から前記第2の距離情報を抽出することを特徴とする付記3記載の目標検出システム。
(付記5) 前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該監視領域は、該第1の目標検出装置が有する複数のセンサ手段の角度範囲と、該第2の目標検出装置が有する複数のセンサ手段の角度範囲とにより、複数の排他領域に分割され、前記処理手段は、前記第1の角度範囲に含まれる各排他領域の符号と、前記第2の角度範囲に含まれる各排他領域の符号とを比較し、両方の角度範囲に共通する符号から前記共通する領域を特定することを特徴とする付記3記載の目標検出システム。
(付記6) 前記第1の目標検出装置は、前記第1の送信信号を生成し、受信信号から前記第1の距離情報を抽出する第1の送受信手段と、該第1の送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替える第1のスイッチ手段をさらに有し、前記第2の目標検出装置は、前記第2の送信信号を生成し、受信信号から前記第2の距離情報を抽出する第2の送受信手段と、該第2の送受信手段と前記複数のセンサ手段の間の接続を、時分割で切り替える第2のスイッチ手段をさらに有することを特徴とする付記3記載の目標検出システム。
(付記7) 第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該第1の目標検出装置を送信機とし該第2の目標検出装置を受信機とするバイスタティックモードで該第1の目標検出装置と第2の目標検出装置を動作させて、該送信機から各目標を経由して該受信機に至る総合伝搬距離情報を各目標について取得し、該第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、該複数の目標の位置を特定する処理手段と
を備えることを特徴とする目標検出システム。
(付記8) 光学系センサ手段をさらに備え、通常は前記第1の目標検出装置と第2の目標検出装置が広角監視を行い、前記目標が緊急性の高い領域へ侵入することが予測される場合に、該光学系センサ手段が該目標を検出することを特徴とする付記3または7記載の目標検出システム。
(付記9) レーザ光を変調して光信号を生成し、該光信号を前記第1の目標検出装置と第2の目標検出装置に分配するレーザ光源手段をさらに備え、該第1の目標検出装置と第2の目標検出装置は、光検出器により該光信号を前記第1の送信信号および第2の送信信号にそれぞれ変換することを特徴とする付記3、7、または8記載の目標検出システム。
(付記10) 第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置を動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該複数の目標に対する第1の距離情報の最小値および最大値と、該複数の目標に対する第2の距離情報の最小値および最大値をそれぞれ半径とする4つの円の方程式から交点の座標を求め、該交点の座標を用いて該複数の目標の存在範囲を特定する処理手段と
を備えることを特徴とする目標検出システム。
(付記11) 前記処理手段は、前記4つの円の方程式の一部が解を持たないとき、該一部の方程式を定める半径の組み合わせを変更して交点の座標を再計算し、得られた交点の座標を用いて前記複数の目標の存在範囲を特定することを特徴とする付記10記載の目標検出システム。
【符号の説明】
【0116】
11、12、13、14、15、16 レーザ装置
21、22、23、31、32 検出装置
24、25、26、27、28、29、41、42、43、44 円弧
61、62、63、64 ピーク
101 送受信手段
102−1、102−2、102−m センサ手段
103 スイッチ手段
200 送受信部
201、202 二極双投スイッチ
203、204、208、1242、1252、1408、1507 分岐部
205、1245、1255、1404、1503 低雑音増幅器
206、1244、1254、1405、1504 ミキサ
207、1243、1253、1407、1506 高出力増幅器
209、1222、1304、1409、1508 無線周波数発振器
210、1221、1305、1410、1509 ベースバンド発振器
401 処理部
402 共通領域
601、602、603、604、605、A1、A2、A3、A4 アンテナ
606 双方向性スイッチ
1201 レーザ光源
1202 光アイソレータ
1203 光バンドパスフィルタ
1204 スプリッタ
1205 遅延器
1206 レーザ検出部
1207、1210 レーダ送受信部
1208、1211、1406、1505 送信アンテナ
1209、1212、1401、1402、1501−1、1501−2、1501−N 受信アンテナ
1223、1301 分布帰還型レーザ
1231 基準ミラー
1232 ハーフミラー
1233 レンズ
1234、1241、1251 光検出器
1302 マッハツェンダ変調器
1303 ファブリペロレーザ
1403 単極双投スイッチ
1502 単極N投スイッチ
1701、1702、1703、1711、1712、1713、1801、1802、1803、1811、1812、1813 円
1721、1722、1723、1724、1821、1822、1823 交点
S1 、S2 目標検出装置
SR11、SR12、SR13、SR21、SR22、SR23 角度範囲
T、T1 、T2 、T3 目標
【特許請求の範囲】
【請求項1】
それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
それぞれ異なる角度範囲に向けて第2の送信信号を送信し、前記目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
前記目標の位置が、前記第1の目標検出装置により前記第1の距離情報が抽出されたときの第1の角度範囲と、前記第2の目標検出装置により前記第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、該第1の距離情報および第2の距離情報から該目標の位置を計算する処理手段と
を備えることを特徴とする目標検出システム。
【請求項2】
前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該第1の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第1の目標検出装置は、前記共通する領域が走査されたタイムスロットにおける受信信号から前記第1の距離情報を抽出し、該第2の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第2の目標検出装置は、該共通する領域が走査されたタイムスロットにおける受信信号から前記第2の距離情報を抽出することを特徴とする請求項1記載の目標検出システム。
【請求項3】
第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該第1の目標検出装置を送信機とし該第2の目標検出装置を受信機とするバイスタティックモードで該第1の目標検出装置と第2の目標検出装置を動作させて、該送信機から各目標を経由して該受信機に至る総合伝搬距離情報を各目標について取得し、該第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、該複数の目標の位置を特定する処理手段と
を備えることを特徴とする目標検出システム。
【請求項4】
レーザ光を変調して光信号を生成し、該光信号を前記第1の目標検出装置と第2の目標検出装置に分配するレーザ光源手段をさらに備え、該第1の目標検出装置と第2の目標検出装置は、光検出器により該光信号を前記第1の送信信号および第2の送信信号にそれぞれ変換することを特徴とする請求項1または3記載の目標検出システム。
【請求項5】
第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置を動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該複数の目標に対する第1の距離情報の最小値および最大値と、該複数の目標に対する第2の距離情報の最小値および最大値をそれぞれ半径とする4つの円の方程式から交点の座標を求め、該交点の座標を用いて該複数の目標の存在範囲を特定する処理手段と
を備えることを特徴とする目標検出システム。
【請求項1】
それぞれ異なる角度範囲に向けて第1の送信信号を送信し、目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
それぞれ異なる角度範囲に向けて第2の送信信号を送信し、前記目標により反射された信号を受信する複数のセンサ手段を有し、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
前記目標の位置が、前記第1の目標検出装置により前記第1の距離情報が抽出されたときの第1の角度範囲と、前記第2の目標検出装置により前記第2の距離情報が抽出されたときの第2の角度範囲の両方に共通する領域内に含まれるという条件を用いて、該第1の距離情報および第2の距離情報から該目標の位置を計算する処理手段と
を備えることを特徴とする目標検出システム。
【請求項2】
前記第1の目標検出装置と第2の目標検出装置は、監視領域の周りの異なる場所に配置され、該第1の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第1の目標検出装置は、前記共通する領域が走査されたタイムスロットにおける受信信号から前記第1の距離情報を抽出し、該第2の目標検出装置が有する複数のセンサ手段は、時分割で割り当てられたタイムスロット毎にそれぞれの角度範囲を走査し、該第2の目標検出装置は、該共通する領域が走査されたタイムスロットにおける受信信号から前記第2の距離情報を抽出することを特徴とする請求項1記載の目標検出システム。
【請求項3】
第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置をモノスタティックモードで動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該第1の目標検出装置を送信機とし該第2の目標検出装置を受信機とするバイスタティックモードで該第1の目標検出装置と第2の目標検出装置を動作させて、該送信機から各目標を経由して該受信機に至る総合伝搬距離情報を各目標について取得し、該第1の距離情報と第2の距離情報の和を各目標の総合伝搬距離情報と比較することで、該複数の目標の位置を特定する処理手段と
を備えることを特徴とする目標検出システム。
【請求項4】
レーザ光を変調して光信号を生成し、該光信号を前記第1の目標検出装置と第2の目標検出装置に分配するレーザ光源手段をさらに備え、該第1の目標検出装置と第2の目標検出装置は、光検出器により該光信号を前記第1の送信信号および第2の送信信号にそれぞれ変換することを特徴とする請求項1または3記載の目標検出システム。
【請求項5】
第1の送信信号を送信し、目標により反射された信号を受信して、受信信号から該目標の第1の距離情報を抽出する第1の目標検出装置と、
第2の送信信号を送信し、前記目標により反射された信号を受信して、受信信号から該目標の第2の距離情報を抽出する第2の目標検出装置と、
複数の目標に対して前記第1の目標検出装置と第2の目標検出装置を動作させて、該第1の目標検出装置から各目標までの第1の距離情報と、該第2の目標検出装置から各目標までの第2の距離情報を取得し、該複数の目標に対する第1の距離情報の最小値および最大値と、該複数の目標に対する第2の距離情報の最小値および最大値をそれぞれ半径とする4つの円の方程式から交点の座標を求め、該交点の座標を用いて該複数の目標の存在範囲を特定する処理手段と
を備えることを特徴とする目標検出システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2012−159512(P2012−159512A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2012−87256(P2012−87256)
【出願日】平成24年4月6日(2012.4.6)
【分割の表示】特願2006−249875(P2006−249875)の分割
【原出願日】平成18年9月14日(2006.9.14)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成24年4月6日(2012.4.6)
【分割の表示】特願2006−249875(P2006−249875)の分割
【原出願日】平成18年9月14日(2006.9.14)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]