
目標検出装置及び目標検出方法
【課題】低S/N環境下においても目標を精度良く検出できるようにする。
【解決手段】目標検出器4は、目標からの反射波を観測した信号から目標の距離と周波数とを2次元で表す観測信号を求める解析処理器11と、複数の粒子フィルタを並列に用いて、観測信号と基準時刻より前に抽出された予測信号とをもとに、基準時刻における目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出処理器12と、抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、基準時刻における目標の距離と周波数とを示す目標信号として検出する検出処理器13と、検出された粒子の軌跡をもとに目標を追跡する追跡処理器14とを具備する。
【解決手段】目標検出器4は、目標からの反射波を観測した信号から目標の距離と周波数とを2次元で表す観測信号を求める解析処理器11と、複数の粒子フィルタを並列に用いて、観測信号と基準時刻より前に抽出された予測信号とをもとに、基準時刻における目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出処理器12と、抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、基準時刻における目標の距離と周波数とを示す目標信号として検出する検出処理器13と、検出された粒子の軌跡をもとに目標を追跡する追跡処理器14とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、飛しょう体のレーダ信号処理装置に設けられる目標検出装置及び目標検出方法に関する。
【背景技術】
【0002】
一般的に、飛しょう体に搭載されるレーダ信号処理装置は、小型化の観点から簡素な構造となっている。目標の検出には、受信した信号をフーリエ変換し、あらかじめ設定したしきい値を超えたものを目標と判定している。
【0003】
しかしながら、低S/N(signal-to-noise ratio)環境下においては、目標成分がしきい値を超えないため、目標を検出できない。その一方、しきい値を下げると、目標以外の誤検出が増えてしまう。地上レーダで静止目標であれば観測時間を延ばすことでS/Nを改善できるが、飛しょう体では目標との距離変化が起きるためその効果が得られない。
【0004】
そこで、この課題を解決する手段として、レーダ装置で観測を複数回繰り返し、ハフ変換(例えば、特許文献1参照。)やTBD(Track Before Detect)アルゴリズム(例えば、特許文献2を参照。)を用いて距離や速度の変化に対応する方法が考案されている。
【0005】
TBDアルゴリズムの計算方式としては、粒子フィルタ(別名、逐次モンテカルロ法)があげられる。粒子フィルタは統計処理を行うため、低S/N環境下のような、信号やノイズがある分布に従いランダムな時間変化を起こし明確な区分ができない状況では有用な方法である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−340691
【特許文献2】特表2006−516728
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、上述の粒子フィルタは、対象物の統計分布を想定する必要があるが、飛しょう体のレーダ装置への適用を考えると、飛しょう体のレーダ装置では運用時間が短く、運用途中でのパラメータ調整が困難であるため、想定していた分布と実際の分布が異なることにより粒子フィルタの効果が十分得られないケースが生じる。
【0008】
また、実際の分布が理論モデル(スワーリングケース)通りでないこともあり、そのときも粒子フィルタの効果が十分得られないケースが生じる。
【0009】
この発明は上記事情に着目してなされたもので、その目的とするところは、低S/N環境下においても目標を精度良く検出可能な目標検出装置及び目標検出方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するためにこの発明に係る目標検出装置は、目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求める解析手段と、複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出手段と、前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出手段と、前記検出された粒子の軌跡をもとに前記目標を追跡する追跡手段とを具備することを特徴とする。
【0011】
また、この発明に係る目標検出方法は、目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求め、複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出し、前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出し、前記検出された粒子の軌跡をもとに前記目標を追跡することを特徴とする。
【発明の効果】
【0012】
したがってこの発明によれば、低S/N環境下においても目標を精度良く検出可能な目標検出装置及び目標検出方法を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る目標検出装置を設けたレーダ信号処理装置の一実施形態を示す機能ブロック図。
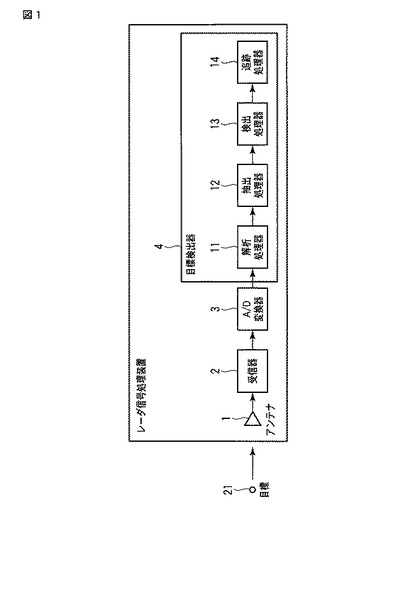
【図2】抽出処理器の内部構成を示す図。
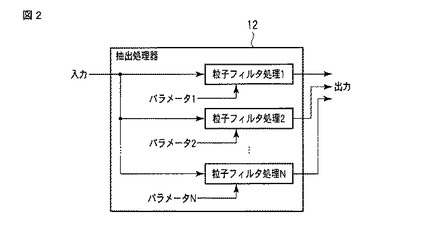
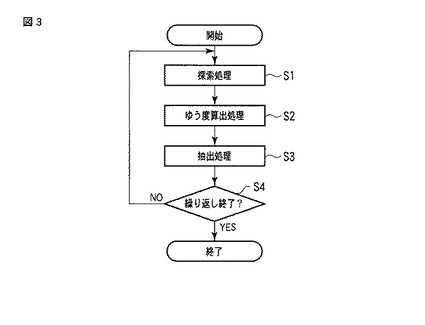
【図3】粒子フィルタの動作を示すフローチャート。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明の実施の形態を詳細に説明する。
図1は、本発明に係る目標検出器を設けたレーダ信号処理装置の一実施形態を示す機能ブロック図である。このレーダ信号処理装置は、飛しょう体に搭載され、目標21からの電波(反射波)を受信するアンテナ1と、反射波を検波する受信器2と、検波信号をデジタル信号に変換するA/D変換器3と、TBDアルゴリズムを用いて、目標の検出を行い航跡を求める目標検出器4とを備える。
【0015】
目標検出器4は、デジタル信号の演算を行う解析処理器11と、目標を抽出する演算を行う抽出処理器12と、目標を検出する検出処理器13と、目標の航跡を求める追跡処理器14とを備える。
【0016】
以下に、このように構成された目標検出器4の動作を説明する。
【0017】
A/D変換器3で変換されたデジタル信号は、目標検出器4に取り込まれ、解析処理器11にてフーリエ変換を行い、距離と周波数の2次元の引数を持つ信号(2次元振幅信号)に変換される。周波数のドップラシフト量より目標速度が求められる。抽出処理器12は、2次元振幅信号と前回時刻の抽出処理信号から複数の粒子フィルタを用いて、現在時刻の目標距離と目標速度の候補点を決定する。
【0018】
抽出処理器12には図2に示すように粒子フィルタをN段に並べる。1〜Nの各粒子フィルタには、信号振幅分布の確率密度関数およびパラメータ、ノイズ分布の確率密度関数およびパラメータを互いに異なるように設定する。確率密度関数には、例えば、理論モデルによる数式または過去の統計などに基づいて作成されたテーブルデータが設定される。
【0019】
図3は、粒子フィルタの動作を示すフローチャートである。
先ず、距離と周波数とを引数とした粒子をI個設定する。ステップS1にて、前回時刻に抽出された各粒子について、今回時刻の距離および周波数の予測値をJ個設定する。
【0020】
ステップS2にて、各粒子の予測距離および周波数に対応する、入力(2次元振幅信号)の値から、ゆう度を算出する。粒子フィルタの番号をn、ゆう度をW、現在の時刻をt、粒子の番号をi、予測値番号をj、2次元振幅信号値をA、n番目の粒子フィルタに設定する信号振幅分布の確率密度関数をPS(n)、ノイズ分布の確率密度関数をPN(n)とすると、ゆう度Wは以下の式より求められる。
W(n,i,j,t)=
PS(n)(A(j))/PN(n)(A(j))・W(n,i,t−1)
上記ステップS2で粒子は一時的にI×J個となり、ステップS3において各粒子のうち、ゆう度の大きいものをI個抽出し、これを今回時刻tの粒子とする。
【0021】
抽出処理器12は、ステップS4にてあらかじめ設定した繰り返し数まで、上記ステップS1〜ステップS3の処理を繰り返す。
【0022】
検出処理器13は、1〜Nの各粒子フィルタの粒子分布状況からまず目標検出に使用するフィルタを決め、その中のI個の粒子についてあらかじめ設定したしきい値を超えるゆう度を持つ粒子を目標として検出する。
【0023】
また、ここで使用した粒子フィルタに対し抽出処理器12にて用いたパラメータを持つ分布が目標信号およびノイズに最も近い分布と判断できることから、この目標信号およびノイズの分布をその推定値とする。
【0024】
追跡処理器14は、検出処理器13で検出した粒子から、上記図3のステップS1にて予測してきた軌跡を逆にたどることにより、目標の距離、周波数変化を求め、これを目標の追跡結果とする。
【0025】
なお、検出処理器13における処理(目標検出および分布推定)は、以下のようにしても良い。1〜Nの各粒子フィルタの出力すべて(I×N個の粒子)について、あらかじめ設定したしきい値を超えるゆう度を持つ粒子を目標として検出する。また、この粒子に対し使用したフィルタの目標信号およびノイズの分布をその推定値とする。
【0026】
以上述べたように、本実施形態では、複数の粒子フィルタ毎に異なる信号振幅分布およびノイズ分布の確率密度関数を数式またはテーブルデータとして設定し、並列処理を行うことで様々な目標およびノイズの分布に対応することができる。
【0027】
したがって、距離、速度のほか信号分布、ノイズ分布に対しても探索を行うことと等価となり、低S/N環境下かつ目標振幅信号の変動分布が変化しうる場合においても、目標をより高い精度で検出でき、飛しょう体からの目標の追跡性能を向上させることができる。また、目標およびノイズの分布を近似的に把握することができる。
【0028】
なお、この発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0029】
1…アンテナ、2…受信器、3…A/D変換器、4…目標検出器、11…解析処理器、12…抽出処理器、13…検出処理器、14…追跡処理器、21…目標。
【技術分野】
【0001】
この発明は、飛しょう体のレーダ信号処理装置に設けられる目標検出装置及び目標検出方法に関する。
【背景技術】
【0002】
一般的に、飛しょう体に搭載されるレーダ信号処理装置は、小型化の観点から簡素な構造となっている。目標の検出には、受信した信号をフーリエ変換し、あらかじめ設定したしきい値を超えたものを目標と判定している。
【0003】
しかしながら、低S/N(signal-to-noise ratio)環境下においては、目標成分がしきい値を超えないため、目標を検出できない。その一方、しきい値を下げると、目標以外の誤検出が増えてしまう。地上レーダで静止目標であれば観測時間を延ばすことでS/Nを改善できるが、飛しょう体では目標との距離変化が起きるためその効果が得られない。
【0004】
そこで、この課題を解決する手段として、レーダ装置で観測を複数回繰り返し、ハフ変換(例えば、特許文献1参照。)やTBD(Track Before Detect)アルゴリズム(例えば、特許文献2を参照。)を用いて距離や速度の変化に対応する方法が考案されている。
【0005】
TBDアルゴリズムの計算方式としては、粒子フィルタ(別名、逐次モンテカルロ法)があげられる。粒子フィルタは統計処理を行うため、低S/N環境下のような、信号やノイズがある分布に従いランダムな時間変化を起こし明確な区分ができない状況では有用な方法である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−340691
【特許文献2】特表2006−516728
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、上述の粒子フィルタは、対象物の統計分布を想定する必要があるが、飛しょう体のレーダ装置への適用を考えると、飛しょう体のレーダ装置では運用時間が短く、運用途中でのパラメータ調整が困難であるため、想定していた分布と実際の分布が異なることにより粒子フィルタの効果が十分得られないケースが生じる。
【0008】
また、実際の分布が理論モデル(スワーリングケース)通りでないこともあり、そのときも粒子フィルタの効果が十分得られないケースが生じる。
【0009】
この発明は上記事情に着目してなされたもので、その目的とするところは、低S/N環境下においても目標を精度良く検出可能な目標検出装置及び目標検出方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するためにこの発明に係る目標検出装置は、目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求める解析手段と、複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出手段と、前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出手段と、前記検出された粒子の軌跡をもとに前記目標を追跡する追跡手段とを具備することを特徴とする。
【0011】
また、この発明に係る目標検出方法は、目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求め、複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出し、前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出し、前記検出された粒子の軌跡をもとに前記目標を追跡することを特徴とする。
【発明の効果】
【0012】
したがってこの発明によれば、低S/N環境下においても目標を精度良く検出可能な目標検出装置及び目標検出方法を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る目標検出装置を設けたレーダ信号処理装置の一実施形態を示す機能ブロック図。
【図2】抽出処理器の内部構成を示す図。
【図3】粒子フィルタの動作を示すフローチャート。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明の実施の形態を詳細に説明する。
図1は、本発明に係る目標検出器を設けたレーダ信号処理装置の一実施形態を示す機能ブロック図である。このレーダ信号処理装置は、飛しょう体に搭載され、目標21からの電波(反射波)を受信するアンテナ1と、反射波を検波する受信器2と、検波信号をデジタル信号に変換するA/D変換器3と、TBDアルゴリズムを用いて、目標の検出を行い航跡を求める目標検出器4とを備える。
【0015】
目標検出器4は、デジタル信号の演算を行う解析処理器11と、目標を抽出する演算を行う抽出処理器12と、目標を検出する検出処理器13と、目標の航跡を求める追跡処理器14とを備える。
【0016】
以下に、このように構成された目標検出器4の動作を説明する。
【0017】
A/D変換器3で変換されたデジタル信号は、目標検出器4に取り込まれ、解析処理器11にてフーリエ変換を行い、距離と周波数の2次元の引数を持つ信号(2次元振幅信号)に変換される。周波数のドップラシフト量より目標速度が求められる。抽出処理器12は、2次元振幅信号と前回時刻の抽出処理信号から複数の粒子フィルタを用いて、現在時刻の目標距離と目標速度の候補点を決定する。
【0018】
抽出処理器12には図2に示すように粒子フィルタをN段に並べる。1〜Nの各粒子フィルタには、信号振幅分布の確率密度関数およびパラメータ、ノイズ分布の確率密度関数およびパラメータを互いに異なるように設定する。確率密度関数には、例えば、理論モデルによる数式または過去の統計などに基づいて作成されたテーブルデータが設定される。
【0019】
図3は、粒子フィルタの動作を示すフローチャートである。
先ず、距離と周波数とを引数とした粒子をI個設定する。ステップS1にて、前回時刻に抽出された各粒子について、今回時刻の距離および周波数の予測値をJ個設定する。
【0020】
ステップS2にて、各粒子の予測距離および周波数に対応する、入力(2次元振幅信号)の値から、ゆう度を算出する。粒子フィルタの番号をn、ゆう度をW、現在の時刻をt、粒子の番号をi、予測値番号をj、2次元振幅信号値をA、n番目の粒子フィルタに設定する信号振幅分布の確率密度関数をPS(n)、ノイズ分布の確率密度関数をPN(n)とすると、ゆう度Wは以下の式より求められる。
W(n,i,j,t)=
PS(n)(A(j))/PN(n)(A(j))・W(n,i,t−1)
上記ステップS2で粒子は一時的にI×J個となり、ステップS3において各粒子のうち、ゆう度の大きいものをI個抽出し、これを今回時刻tの粒子とする。
【0021】
抽出処理器12は、ステップS4にてあらかじめ設定した繰り返し数まで、上記ステップS1〜ステップS3の処理を繰り返す。
【0022】
検出処理器13は、1〜Nの各粒子フィルタの粒子分布状況からまず目標検出に使用するフィルタを決め、その中のI個の粒子についてあらかじめ設定したしきい値を超えるゆう度を持つ粒子を目標として検出する。
【0023】
また、ここで使用した粒子フィルタに対し抽出処理器12にて用いたパラメータを持つ分布が目標信号およびノイズに最も近い分布と判断できることから、この目標信号およびノイズの分布をその推定値とする。
【0024】
追跡処理器14は、検出処理器13で検出した粒子から、上記図3のステップS1にて予測してきた軌跡を逆にたどることにより、目標の距離、周波数変化を求め、これを目標の追跡結果とする。
【0025】
なお、検出処理器13における処理(目標検出および分布推定)は、以下のようにしても良い。1〜Nの各粒子フィルタの出力すべて(I×N個の粒子)について、あらかじめ設定したしきい値を超えるゆう度を持つ粒子を目標として検出する。また、この粒子に対し使用したフィルタの目標信号およびノイズの分布をその推定値とする。
【0026】
以上述べたように、本実施形態では、複数の粒子フィルタ毎に異なる信号振幅分布およびノイズ分布の確率密度関数を数式またはテーブルデータとして設定し、並列処理を行うことで様々な目標およびノイズの分布に対応することができる。
【0027】
したがって、距離、速度のほか信号分布、ノイズ分布に対しても探索を行うことと等価となり、低S/N環境下かつ目標振幅信号の変動分布が変化しうる場合においても、目標をより高い精度で検出でき、飛しょう体からの目標の追跡性能を向上させることができる。また、目標およびノイズの分布を近似的に把握することができる。
【0028】
なお、この発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0029】
1…アンテナ、2…受信器、3…A/D変換器、4…目標検出器、11…解析処理器、12…抽出処理器、13…検出処理器、14…追跡処理器、21…目標。
【特許請求の範囲】
【請求項1】
目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求める解析手段と、
複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出手段と、
前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出手段と、
前記検出された粒子の軌跡をもとに前記目標を追跡する追跡手段と
を具備することを特徴とする目標検出装置。
【請求項2】
前記粒子フィルタには、信号分布及びノイズ分布の確率密度関数がテーブルデータで設定されることを特徴とする請求項1記載の目標検出装置。
【請求項3】
目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求め、
複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出し、
前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出し、
前記検出された粒子の軌跡をもとに前記目標を追跡することを特徴とする目標検出方法。
【請求項4】
前記粒子フィルタには、信号分布及びノイズ分布の確率密度関数がテーブルデータで設定されることを特徴とする請求項3記載の目標検出方法。
【請求項1】
目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求める解析手段と、
複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出手段と、
前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出手段と、
前記検出された粒子の軌跡をもとに前記目標を追跡する追跡手段と
を具備することを特徴とする目標検出装置。
【請求項2】
前記粒子フィルタには、信号分布及びノイズ分布の確率密度関数がテーブルデータで設定されることを特徴とする請求項1記載の目標検出装置。
【請求項3】
目標からの反射波を観測した信号から前記目標の距離と周波数とを2次元で表す観測信号を求め、
複数の粒子フィルタを並列に用いて、前記観測信号と基準時刻より前に抽出された予測信号とをもとに、前記基準時刻における前記目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出し、
前記抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、前記基準時刻における前記目標の距離と周波数とを示す目標信号として検出する検出し、
前記検出された粒子の軌跡をもとに前記目標を追跡することを特徴とする目標検出方法。
【請求項4】
前記粒子フィルタには、信号分布及びノイズ分布の確率密度関数がテーブルデータで設定されることを特徴とする請求項3記載の目標検出方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−210579(P2010−210579A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−59735(P2009−59735)
【出願日】平成21年3月12日(2009.3.12)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月12日(2009.3.12)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]