
目標検出装置及び目標検出方法
【課題】低SNR環境下にあっても目標を精度良く検出できるようにする。
【解決手段】目標検出装置14は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析処理器15と、解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出処理器16と、抽出処理器16がゆう度を算出するセルの配分を制御する配分処理器16と、抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出処理器17と、検出処理器17が検出した2次元ベクトルから目標の軌跡を生成する航跡生成処理器18を具備する。
【解決手段】目標検出装置14は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析処理器15と、解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出処理器16と、抽出処理器16がゆう度を算出するセルの配分を制御する配分処理器16と、抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出処理器17と、検出処理器17が検出した2次元ベクトルから目標の軌跡を生成する航跡生成処理器18を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛しょう体のレーダ信号処理装置において実現される目標検出装置及び目標検出方法に関する。
【背景技術】
【0002】
レーダ装置において、電波を用いて目標の距離や方向を求める目標検出技術では、受信した信号をフーリエ変換し、あらかじめ設定した閾値を超えた信号が目標を示す信号であると判定する。このとき、信号雑音比が低い低SNR(signal-to-noise ratio)環境では、目標成分が閾値を超えず、目標を検出できない可能性がある。一方、閾値を下げると、目標以外の信号を誤検出してしまいかねない。
【0003】
低SNR環境下でも目標を検出する技術として、特許文献1には、目標の想定される旋回半径毎に、ハフ変換等を用いて円周抽出処理を行う技術が記載されている。また、特許文献2には、検出前トラック(track before detect;TBD)ルーチンによって一連の走査中の同じ方位各及び範囲セルからの信号を集積し、目標検出を改善する技術が記載されている。
【0004】
TBDアルゴリズムの計算方式としては、非特許文献1に記載の粒子フィルタ(逐次モンテカルロ法)があげられる。粒子フィルタは統計処理を行うため、低SNR環境下のような、信号やノイズがある分布に従いランダムな時間変化を起こし明確な区分ができない状況では有用な方法である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−340691号公報(段落0023)
【特許文献2】特表2006−516728号公報(段落0038)
【非特許文献】
【0006】
【非特許文献1】樋口、「粒子フィルタ」、電子情報通信学会誌、Vol.88、No.12、pp.989-994、2005年12月
【発明の概要】
【発明が解決しようとする課題】
【0007】
レーダの受信信号に目標を表す信号成分が含まれていれば、上述の粒子フィルタにより目標を検出することができる。しかしながら、受信信号に目標信号成分が含まれず、ノイズ信号のみが含まれている場合、そのノイズ中から最適解が求められてしまう。このためノイズが目標として誤検出されかねない。
【0008】
本発明は、前記のような問題に鑑みなされたもので、低SNR環境下であっても目標を精度良く検出できる目標検出装置及び目標検出方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一実施形態に係る目標検出装置は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析手段と、前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出手段と、前記抽出手段がゆう度を算出するセルの配分を制御する配分手段と、前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出手段と、前記検出手段が検出した2次元ベクトルから目標の軌跡を生成する軌跡生成手段と具備する。
【0010】
本発明の一実施形態に係る目標検出方法は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析ステップと、前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出ステップと、前記抽出ステップにおいてゆう度が算出されるセルの配分を制御する配分ステップと、前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出ステップと、前記検出ステップにおいて検出された2次元ベクトルから目標の軌跡を生成する軌跡生成ステップを具備する。
【発明の効果】
【0011】
したがってこの発明によれば、低SNR環境下であっても目標を精度良く検出できる目標検出装置及び目標検出方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る飛しょう体の概略構成を示す図。
【図2】本発明の一実施形態に係る目標検出装置の詳細構成を示すブロック図。
【図3】粒子フィルタの一例を示す図。
【図4】粒子フィルタの動作を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明による目標位置検出装置の実施形態を説明する。
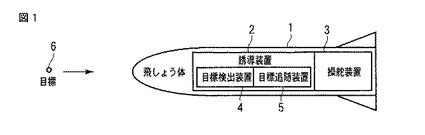
図1は、本発明の一実施形態に係る飛しょう体1の概略構成を示す図である。
【0014】
飛しょう体1は、誘導装置2及び操舵装置3を備えており、空中を飛しょうする目標6の位置を検出し、追随する。誘導装置2は、飛しょう体1が目標6の方向へ飛しょうするための誘導信号を出力する。操舵装置3は、当該誘導信号に従い、目標6の方向へ飛しょう体1の姿勢を変える操舵制御を行なう。
【0015】
誘導装置2は、目標検出装置4及び目標追随装置5を備えている。目標検出装置4は、レーダ信号を利用して目標6を検出するための装置である。目標追随装置5は、目標検出装置4が検出した目標の位置及び位相速度に応じて誘導信号を生成する。
【0016】
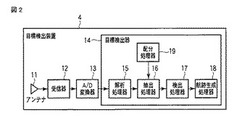
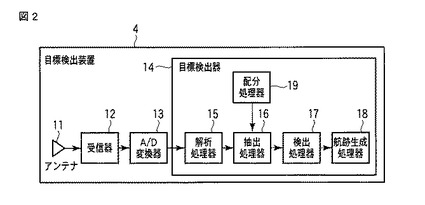
図2は、本実施形態に係る目標検出装置4の詳細構成を示す機能ブロック図である。
目標検出装置4は、アンテナ11、受信器12、A/D変換器13、目標検出器14を備えている。
【0017】
アンテナ11は、目標6によって反射された反射信号を検出する。飛しょう体1は図示しないレーダ送信器を具備しており、アンテナ11は、このレーダ送信器から送出され目標6によって反射されたレーダ信号を検出する。あるいは、地上等に飛しょう体1とは別個に設けられたレーダ送信器から送出され目標6によって反射されたレーダ信号が、アンテナ11によって検出されてもよい。
【0018】
受信器12は、アンテナ11が検出した反射信号を受信して、復調処理等の必要な信号処理を行い、信号処理後の反射信号をA/D変換器13に送信する。
【0019】
A/D変換器13は、受信器12から送られた反射信号をデジタル信号に変換し、目標検出器14に出力する。
【0020】
目標検出器14は、解析処理器15、抽出処理器16、検出処理器17、航跡生成処理器18、及び配分処理器19を備えている。目標検出器14は、A/D変換器13から出力されたデジタル信号に基づき、目標6の位置を検出し、その航跡を求める。目標検出器14は、図示しないプロセッサ、プログラムメモリ、及びワークメモリを備え、プロセッサがプログラムメモリに記憶された所定のプログラムを実行することで、各部の機能が実現されてもよい。
【0021】
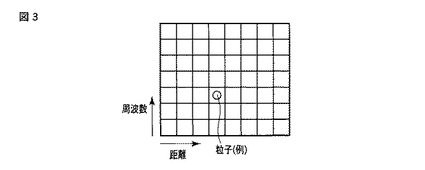
解析処理器15は、デジタル信号にフーリエ変換を行い、反射距離及び周波数の変数である解析信号に変換する。解析処理器15の分解能(セル)単位(図3参照)で、フーリエ変換された信号(強度)の分布(すなわち目標6として捕捉される物体の状態分布)を表すことができる。また、解析処理器15は、周波数のドップラシフト量より目標6の移動速度を算出することができる。
【0022】
抽出処理器16は、解析処理器15から出力される解析信号に対して、粒子フィルタを用いて抽出処理(図4参照)を行い、目標6を示すと推定される点を抽出する。
【0023】
図3は、粒子フィルタの一例を示す図である。本実施形態では、抽出処理器16は、粒子フィルタの各セル(粒子)において、後述するゆう度の値を算出する。粒子フィルタは、目標6を表す信号を、粒子フィルタにおける粒子分布で表したものである。粒子フィルタにおいて、ゆう度の値が大きいセル(粒子)が、目標6が存在する観測領域に対応すると推定される。粒子フィルタにおいてそれぞれのセル(粒子)は、2次元ベクトル(距離,周波数)によって指定される。
【0024】
粒子フィルタは、状態空間モデルにおいて状態ベクトルを推定する手法の一つである。状態空間モデルでは、m次元ベクトルの時系列観測値ytに基づいて状態ベクトルxtを推定することが考えられる。時刻kまでの観測値yl:k={y1,y2,…,yk}に基づいて状態xtの推定を行なう場合、k<tであれば、状態xtの分布を予測することができる。観測値yl:kが与えられたとき、xtの条件付分布p(xt|yl:k)を求めれば、状態xtを推定することができる。このxt条件付分布p(xt|yl:k)は、遂次モンテカルロ法などを用いて導出することができる(非特許文献1参照)。また、粒子フィルタのアルゴリズムによれば、各点のゆう度も、条件付き分布p(yt|yt−1)で算出する。本実施形態においては、観測値yjは2次元のベクトル(距離,周波数)の変数として与えられる反射信号の時系列であり、状態xtの分布は目標6の分布を表す。
【0025】
抽出処理器16は、図3に示す粒子フィルタのセルから、ゆう度の値の大きいI個のセルを抽出し、この抽出されたI個のセルが目標6を示すベクトル(距離,周波数)に対応すると推定する。反射信号が検出されたセルで、前回の観測でも反射信号が検出されている場合には、ゆう度の値が大きくなる。すなわち、ゆう度の大きさは、反射信号が検出されたセルにおいて、当該反射信号が目標6から反射されたものであると推測するもっともらしさを表す。
【0026】
検出処理器17は、抽出処理器16が抽出したゆう度の大きい粒子のうち所定の閾値を超えるゆう度を持つ粒子を検出する。検出された粒子のいるセルによって指定される距離及び周波数が、目標6に対応する距離及び周波数であるとされる。
【0027】
航跡生成処理器18は、検出処理器17で検出したセルの予測経路を逆にたどることにより、目標6の距離及び周波数の時間変化を求める。この距離及び周波数の時間変化を目標6の追随結果とする。
【0028】
配分処理器19は、抽出処理器16によって粒子フィルタ処理される対象のセルを配分し直す。この配分処理器19は、観測途中で目標6が現れる場合にも対応できるように設けられている。
【0029】
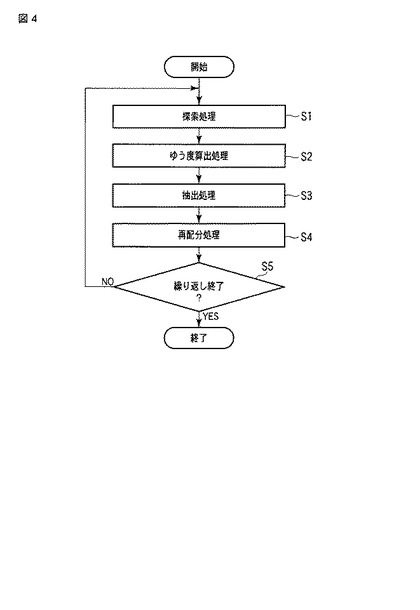
続いて、上述の目標検出器14において実行される抽出処理の詳細について説明する。図4は、抽出処理器16及び配分処理器19によって実行される抽出処理を示すフローチャートである。
【0030】
抽出処理器16は、前回実行された抽出処理で抽出されたI+K個の粒子(目標候補点)それぞれについて、予測値ベクトル(予測距離,予測周波数)をJ個ずつ設定する探索処理を行う(ステップS1)。予測値ベクトルは、各粒子についての距離および周波数の予測値を要素とする2次元のベクトルである。
【0031】
そして、抽出処理器16は、各粒子についての予測値ベクトル(予測距離,予測周波数)に対応する入力(反射信号)の値に基づいて、以下の式(1)よりゆう度Wを算出する(ステップS2)。
【0032】
W(i,j,t)=P(A(j))・W(i,t−1) (1)
ここで、tは現在時刻、iは粒子を指定する粒子番号である。予測値番号をj(=1,2,…,J)、反射信号の値(信号強度)をAとし、粒子フィルタに設定する信号分布の確率密度関数をPとする。I+K個の粒子それぞれに対してJ個の予測値ベクトルが存在し、それぞれのベクトルであらわされるセルについて粒子を1個ずつ割り当て、ゆう度Wを算出する。このため、粒子の数は、一時的に(I+K)×J個となる。信号分布の確率密度関数としては、追随する目標6に応じて、例えばレイリー分布やライス分布等を用いることができる。
【0033】
抽出処理器16は、(I+K)×J個の粒子のうち、ゆう度の大きいものをI個抽出する(ステップS3)。ここで、粒子の数はI個に減少する。
【0034】
その後、配分処理器19は、新たにK個の粒子を、抽出処理器16による抽出対象として割り当てる(ステップS4)。割り当ての方法としては、例えば図3の観測領域の全セルに1つずつ粒子を割り当てることが考えられる。すなわち、観測領域の全セルに、所定の値のゆう度を割り当てることとしてもよい。粒子フィルタのアルゴリズムでは、復元抽出、すなわち一度取り出した粒子を再びサンプルすることが許されているため、Kの値が全セルの数を表したとしても、I+K個の粒子を処理対象とすることができる。目標6の特性、あるいは目標検出器14の特性に応じて予め目標6の出現確率が高い領域が分かっている場合、当該領域周辺のセルのみに所定の値のゆう度を割り当ててもよい。
【0035】
その後、予め設定した回数の抽出処理が終了したか否かを判定する(ステップS5)。予め設定した回数の処理が終了していない場合(ステップS5でNo)、ステップS1に戻り、配分処理器19によって設定されたI+K個のセルについて、以降の処理が繰り返される。
【0036】
予め設定した回数の処理が終了したら(ステップS5でYes)、フローを終了する。
【0037】
処理終了後、検出処理器17は、ステップS3で抽出したゆう度の大きい粒子のうち所定の閾値を超えるゆう度を持つ粒子を検出する。検出されたセルに対応して、目標6を示すと推測される信号の反射距離と周波数が分かる。
【0038】
航跡生成処理器18は、検出処理器17が検出した粒子について、ステップS1によって予測してきた経路を逆にたどることにより、目標6の反射距離と周波数の変化を求め、これを目標の追随結果とする。航跡生成処理部18は、追随結果に含まれる距離情報と速度情報に基づいて、観測時間内の距離変化量から算出した速度と観測時間内の速度情報の平均値を比較する。比較の結果、その差が所定の値より大きい場合は、当該粒子は目標ではなくノイズの誤検出であると見なし、検出結果から除外する。
【0039】
以上のように、当初は観測領域全体で均一であった粒子のゆう度配置が、ステップS1〜S3の粒子フィルタ処理の繰り返しによって、何らかの物体が存在する領域に対応する距離、周波数で現されるセルに集中する。このため、当該存在領域から離れたセルには粒子が無く、このようなセルはゆう度Wの値を持たない。このような存在領域から離れたセルに、観測途中で目標を表す信号が新たに生じた場合、これらのセルでは式(1)からゆう度の値を算出できないため、新たな目標を検出することができない。このため、配分処理器19によって存在領域から離れたセルにもゆう度(粒子)を再配分する。これによって、観測途中から現れた目標に対処することができる。
【0040】
また、配分処理器19により生成したゆう度(粒子)は、生成した時刻以前の距離、周波数情報を持たない。このため、目標の6移動情報のみが保存され、ノイズの情報は入らない。従って、航跡生成処理器18による目標の識別に際して、ノイズであると誤って判断することを減らすことができる。
【0041】
従って、本実施形態に係る抽出処理によれば、多点探索(ステップS1)の結果が収束値に近い(ノイズへ収束している)段階で、観測途中から目標が現れ、当該目標を表す信号が受信信号に含まれるようになっても、目標信号を検出することができるようになる。また、観測途中から目標を示す信号を受信した場合に、それ以前のノイズを含まない情報を得ることができ、より正確な追随結果が得えられるようになる。
【0042】
以上から、粒子フィルタアルゴリズムを用いる目標検出において、受信信号に目標信号成分が含まれない、あるいは観測途中から目標が現れる場合でもノイズの誤検出を抑え、目標の検出確率を上げることができる。
【0043】
本願発明は、前記各実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。さらに、前記各実施形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせにより種々の発明が抽出され得る。例えば、1つの実施形態に示される全構成要件から幾つかの構成要件が削除されたり、幾つかの実施形態に示される構成要件が組み合わされても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果の欄で述べられている効果が得られる場合には、この構成要件が削除されたり組み合わされた構成が発明として抽出され得るものである。
【符号の説明】
【0044】
1…飛しょう体、2…誘導装置、3…操舵装置、4…目標検出装置、5…目標追随装置、6…目標、11…アンテナ、12…受信器、13…A/D変換器、14…目標検出器、15…解析処理器、16…抽出処理器、17…検出処理器、18…航跡生成処理器、19…配分処理器。
【技術分野】
【0001】
本発明は、飛しょう体のレーダ信号処理装置において実現される目標検出装置及び目標検出方法に関する。
【背景技術】
【0002】
レーダ装置において、電波を用いて目標の距離や方向を求める目標検出技術では、受信した信号をフーリエ変換し、あらかじめ設定した閾値を超えた信号が目標を示す信号であると判定する。このとき、信号雑音比が低い低SNR(signal-to-noise ratio)環境では、目標成分が閾値を超えず、目標を検出できない可能性がある。一方、閾値を下げると、目標以外の信号を誤検出してしまいかねない。
【0003】
低SNR環境下でも目標を検出する技術として、特許文献1には、目標の想定される旋回半径毎に、ハフ変換等を用いて円周抽出処理を行う技術が記載されている。また、特許文献2には、検出前トラック(track before detect;TBD)ルーチンによって一連の走査中の同じ方位各及び範囲セルからの信号を集積し、目標検出を改善する技術が記載されている。
【0004】
TBDアルゴリズムの計算方式としては、非特許文献1に記載の粒子フィルタ(逐次モンテカルロ法)があげられる。粒子フィルタは統計処理を行うため、低SNR環境下のような、信号やノイズがある分布に従いランダムな時間変化を起こし明確な区分ができない状況では有用な方法である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−340691号公報(段落0023)
【特許文献2】特表2006−516728号公報(段落0038)
【非特許文献】
【0006】
【非特許文献1】樋口、「粒子フィルタ」、電子情報通信学会誌、Vol.88、No.12、pp.989-994、2005年12月
【発明の概要】
【発明が解決しようとする課題】
【0007】
レーダの受信信号に目標を表す信号成分が含まれていれば、上述の粒子フィルタにより目標を検出することができる。しかしながら、受信信号に目標信号成分が含まれず、ノイズ信号のみが含まれている場合、そのノイズ中から最適解が求められてしまう。このためノイズが目標として誤検出されかねない。
【0008】
本発明は、前記のような問題に鑑みなされたもので、低SNR環境下であっても目標を精度良く検出できる目標検出装置及び目標検出方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一実施形態に係る目標検出装置は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析手段と、前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出手段と、前記抽出手段がゆう度を算出するセルの配分を制御する配分手段と、前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出手段と、前記検出手段が検出した2次元ベクトルから目標の軌跡を生成する軌跡生成手段と具備する。
【0010】
本発明の一実施形態に係る目標検出方法は、レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析ステップと、前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出ステップと、前記抽出ステップにおいてゆう度が算出されるセルの配分を制御する配分ステップと、前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出ステップと、前記検出ステップにおいて検出された2次元ベクトルから目標の軌跡を生成する軌跡生成ステップを具備する。
【発明の効果】
【0011】
したがってこの発明によれば、低SNR環境下であっても目標を精度良く検出できる目標検出装置及び目標検出方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る飛しょう体の概略構成を示す図。
【図2】本発明の一実施形態に係る目標検出装置の詳細構成を示すブロック図。
【図3】粒子フィルタの一例を示す図。
【図4】粒子フィルタの動作を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明による目標位置検出装置の実施形態を説明する。
図1は、本発明の一実施形態に係る飛しょう体1の概略構成を示す図である。
【0014】
飛しょう体1は、誘導装置2及び操舵装置3を備えており、空中を飛しょうする目標6の位置を検出し、追随する。誘導装置2は、飛しょう体1が目標6の方向へ飛しょうするための誘導信号を出力する。操舵装置3は、当該誘導信号に従い、目標6の方向へ飛しょう体1の姿勢を変える操舵制御を行なう。
【0015】
誘導装置2は、目標検出装置4及び目標追随装置5を備えている。目標検出装置4は、レーダ信号を利用して目標6を検出するための装置である。目標追随装置5は、目標検出装置4が検出した目標の位置及び位相速度に応じて誘導信号を生成する。
【0016】
図2は、本実施形態に係る目標検出装置4の詳細構成を示す機能ブロック図である。
目標検出装置4は、アンテナ11、受信器12、A/D変換器13、目標検出器14を備えている。
【0017】
アンテナ11は、目標6によって反射された反射信号を検出する。飛しょう体1は図示しないレーダ送信器を具備しており、アンテナ11は、このレーダ送信器から送出され目標6によって反射されたレーダ信号を検出する。あるいは、地上等に飛しょう体1とは別個に設けられたレーダ送信器から送出され目標6によって反射されたレーダ信号が、アンテナ11によって検出されてもよい。
【0018】
受信器12は、アンテナ11が検出した反射信号を受信して、復調処理等の必要な信号処理を行い、信号処理後の反射信号をA/D変換器13に送信する。
【0019】
A/D変換器13は、受信器12から送られた反射信号をデジタル信号に変換し、目標検出器14に出力する。
【0020】
目標検出器14は、解析処理器15、抽出処理器16、検出処理器17、航跡生成処理器18、及び配分処理器19を備えている。目標検出器14は、A/D変換器13から出力されたデジタル信号に基づき、目標6の位置を検出し、その航跡を求める。目標検出器14は、図示しないプロセッサ、プログラムメモリ、及びワークメモリを備え、プロセッサがプログラムメモリに記憶された所定のプログラムを実行することで、各部の機能が実現されてもよい。
【0021】
解析処理器15は、デジタル信号にフーリエ変換を行い、反射距離及び周波数の変数である解析信号に変換する。解析処理器15の分解能(セル)単位(図3参照)で、フーリエ変換された信号(強度)の分布(すなわち目標6として捕捉される物体の状態分布)を表すことができる。また、解析処理器15は、周波数のドップラシフト量より目標6の移動速度を算出することができる。
【0022】
抽出処理器16は、解析処理器15から出力される解析信号に対して、粒子フィルタを用いて抽出処理(図4参照)を行い、目標6を示すと推定される点を抽出する。
【0023】
図3は、粒子フィルタの一例を示す図である。本実施形態では、抽出処理器16は、粒子フィルタの各セル(粒子)において、後述するゆう度の値を算出する。粒子フィルタは、目標6を表す信号を、粒子フィルタにおける粒子分布で表したものである。粒子フィルタにおいて、ゆう度の値が大きいセル(粒子)が、目標6が存在する観測領域に対応すると推定される。粒子フィルタにおいてそれぞれのセル(粒子)は、2次元ベクトル(距離,周波数)によって指定される。
【0024】
粒子フィルタは、状態空間モデルにおいて状態ベクトルを推定する手法の一つである。状態空間モデルでは、m次元ベクトルの時系列観測値ytに基づいて状態ベクトルxtを推定することが考えられる。時刻kまでの観測値yl:k={y1,y2,…,yk}に基づいて状態xtの推定を行なう場合、k<tであれば、状態xtの分布を予測することができる。観測値yl:kが与えられたとき、xtの条件付分布p(xt|yl:k)を求めれば、状態xtを推定することができる。このxt条件付分布p(xt|yl:k)は、遂次モンテカルロ法などを用いて導出することができる(非特許文献1参照)。また、粒子フィルタのアルゴリズムによれば、各点のゆう度も、条件付き分布p(yt|yt−1)で算出する。本実施形態においては、観測値yjは2次元のベクトル(距離,周波数)の変数として与えられる反射信号の時系列であり、状態xtの分布は目標6の分布を表す。
【0025】
抽出処理器16は、図3に示す粒子フィルタのセルから、ゆう度の値の大きいI個のセルを抽出し、この抽出されたI個のセルが目標6を示すベクトル(距離,周波数)に対応すると推定する。反射信号が検出されたセルで、前回の観測でも反射信号が検出されている場合には、ゆう度の値が大きくなる。すなわち、ゆう度の大きさは、反射信号が検出されたセルにおいて、当該反射信号が目標6から反射されたものであると推測するもっともらしさを表す。
【0026】
検出処理器17は、抽出処理器16が抽出したゆう度の大きい粒子のうち所定の閾値を超えるゆう度を持つ粒子を検出する。検出された粒子のいるセルによって指定される距離及び周波数が、目標6に対応する距離及び周波数であるとされる。
【0027】
航跡生成処理器18は、検出処理器17で検出したセルの予測経路を逆にたどることにより、目標6の距離及び周波数の時間変化を求める。この距離及び周波数の時間変化を目標6の追随結果とする。
【0028】
配分処理器19は、抽出処理器16によって粒子フィルタ処理される対象のセルを配分し直す。この配分処理器19は、観測途中で目標6が現れる場合にも対応できるように設けられている。
【0029】
続いて、上述の目標検出器14において実行される抽出処理の詳細について説明する。図4は、抽出処理器16及び配分処理器19によって実行される抽出処理を示すフローチャートである。
【0030】
抽出処理器16は、前回実行された抽出処理で抽出されたI+K個の粒子(目標候補点)それぞれについて、予測値ベクトル(予測距離,予測周波数)をJ個ずつ設定する探索処理を行う(ステップS1)。予測値ベクトルは、各粒子についての距離および周波数の予測値を要素とする2次元のベクトルである。
【0031】
そして、抽出処理器16は、各粒子についての予測値ベクトル(予測距離,予測周波数)に対応する入力(反射信号)の値に基づいて、以下の式(1)よりゆう度Wを算出する(ステップS2)。
【0032】
W(i,j,t)=P(A(j))・W(i,t−1) (1)
ここで、tは現在時刻、iは粒子を指定する粒子番号である。予測値番号をj(=1,2,…,J)、反射信号の値(信号強度)をAとし、粒子フィルタに設定する信号分布の確率密度関数をPとする。I+K個の粒子それぞれに対してJ個の予測値ベクトルが存在し、それぞれのベクトルであらわされるセルについて粒子を1個ずつ割り当て、ゆう度Wを算出する。このため、粒子の数は、一時的に(I+K)×J個となる。信号分布の確率密度関数としては、追随する目標6に応じて、例えばレイリー分布やライス分布等を用いることができる。
【0033】
抽出処理器16は、(I+K)×J個の粒子のうち、ゆう度の大きいものをI個抽出する(ステップS3)。ここで、粒子の数はI個に減少する。
【0034】
その後、配分処理器19は、新たにK個の粒子を、抽出処理器16による抽出対象として割り当てる(ステップS4)。割り当ての方法としては、例えば図3の観測領域の全セルに1つずつ粒子を割り当てることが考えられる。すなわち、観測領域の全セルに、所定の値のゆう度を割り当てることとしてもよい。粒子フィルタのアルゴリズムでは、復元抽出、すなわち一度取り出した粒子を再びサンプルすることが許されているため、Kの値が全セルの数を表したとしても、I+K個の粒子を処理対象とすることができる。目標6の特性、あるいは目標検出器14の特性に応じて予め目標6の出現確率が高い領域が分かっている場合、当該領域周辺のセルのみに所定の値のゆう度を割り当ててもよい。
【0035】
その後、予め設定した回数の抽出処理が終了したか否かを判定する(ステップS5)。予め設定した回数の処理が終了していない場合(ステップS5でNo)、ステップS1に戻り、配分処理器19によって設定されたI+K個のセルについて、以降の処理が繰り返される。
【0036】
予め設定した回数の処理が終了したら(ステップS5でYes)、フローを終了する。
【0037】
処理終了後、検出処理器17は、ステップS3で抽出したゆう度の大きい粒子のうち所定の閾値を超えるゆう度を持つ粒子を検出する。検出されたセルに対応して、目標6を示すと推測される信号の反射距離と周波数が分かる。
【0038】
航跡生成処理器18は、検出処理器17が検出した粒子について、ステップS1によって予測してきた経路を逆にたどることにより、目標6の反射距離と周波数の変化を求め、これを目標の追随結果とする。航跡生成処理部18は、追随結果に含まれる距離情報と速度情報に基づいて、観測時間内の距離変化量から算出した速度と観測時間内の速度情報の平均値を比較する。比較の結果、その差が所定の値より大きい場合は、当該粒子は目標ではなくノイズの誤検出であると見なし、検出結果から除外する。
【0039】
以上のように、当初は観測領域全体で均一であった粒子のゆう度配置が、ステップS1〜S3の粒子フィルタ処理の繰り返しによって、何らかの物体が存在する領域に対応する距離、周波数で現されるセルに集中する。このため、当該存在領域から離れたセルには粒子が無く、このようなセルはゆう度Wの値を持たない。このような存在領域から離れたセルに、観測途中で目標を表す信号が新たに生じた場合、これらのセルでは式(1)からゆう度の値を算出できないため、新たな目標を検出することができない。このため、配分処理器19によって存在領域から離れたセルにもゆう度(粒子)を再配分する。これによって、観測途中から現れた目標に対処することができる。
【0040】
また、配分処理器19により生成したゆう度(粒子)は、生成した時刻以前の距離、周波数情報を持たない。このため、目標の6移動情報のみが保存され、ノイズの情報は入らない。従って、航跡生成処理器18による目標の識別に際して、ノイズであると誤って判断することを減らすことができる。
【0041】
従って、本実施形態に係る抽出処理によれば、多点探索(ステップS1)の結果が収束値に近い(ノイズへ収束している)段階で、観測途中から目標が現れ、当該目標を表す信号が受信信号に含まれるようになっても、目標信号を検出することができるようになる。また、観測途中から目標を示す信号を受信した場合に、それ以前のノイズを含まない情報を得ることができ、より正確な追随結果が得えられるようになる。
【0042】
以上から、粒子フィルタアルゴリズムを用いる目標検出において、受信信号に目標信号成分が含まれない、あるいは観測途中から目標が現れる場合でもノイズの誤検出を抑え、目標の検出確率を上げることができる。
【0043】
本願発明は、前記各実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。さらに、前記各実施形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせにより種々の発明が抽出され得る。例えば、1つの実施形態に示される全構成要件から幾つかの構成要件が削除されたり、幾つかの実施形態に示される構成要件が組み合わされても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果の欄で述べられている効果が得られる場合には、この構成要件が削除されたり組み合わされた構成が発明として抽出され得るものである。
【符号の説明】
【0044】
1…飛しょう体、2…誘導装置、3…操舵装置、4…目標検出装置、5…目標追随装置、6…目標、11…アンテナ、12…受信器、13…A/D変換器、14…目標検出器、15…解析処理器、16…抽出処理器、17…検出処理器、18…航跡生成処理器、19…配分処理器。
【特許請求の範囲】
【請求項1】
レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析手段と、
前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出手段と、
前記抽出手段がゆう度を算出するセルの配分を制御する配分手段と、
前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出手段と、
前記検出手段が検出した2次元ベクトルから目標の軌跡を生成する軌跡生成手段と、
を具備する目標検出装置。
【請求項2】
前記配分手段は、前記粒子フィルタの全てのセルにゆう度を与える請求項1記載の目標検出装置。
【請求項3】
前記2次元ベクトルは、前記レーダ反射信号の反射距離及び周波数からなる請求項1記載の目標検出装置。
【請求項4】
レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析ステップと、
前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出ステップと、
前記抽出ステップにおいてゆう度が算出されるセルの配分を制御する配分ステップと、
前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出ステップと、
前記検出ステップにおいて検出された2次元ベクトルから目標の軌跡を生成する軌跡生成ステップと、
を具備する目標検出方法。
【請求項5】
前記配分ステップでは、前記粒子フィルタの全てのセルにゆう度を与える請求項4記載の目標検出方法。
【請求項6】
前記2次元ベクトルは、前記レーダ反射信号の反射距離及び周波数からなる請求項4記載の目標検出方法。
【請求項1】
レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析手段と、
前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出手段と、
前記抽出手段がゆう度を算出するセルの配分を制御する配分手段と、
前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出手段と、
前記検出手段が検出した2次元ベクトルから目標の軌跡を生成する軌跡生成手段と、
を具備する目標検出装置。
【請求項2】
前記配分手段は、前記粒子フィルタの全てのセルにゆう度を与える請求項1記載の目標検出装置。
【請求項3】
前記2次元ベクトルは、前記レーダ反射信号の反射距離及び周波数からなる請求項1記載の目標検出装置。
【請求項4】
レーダ反射信号を2次元ベクトルによって指定される解析信号に変換する解析ステップと、
前記解析信号に対して粒子フィルタを設定して、セル毎のゆう度を算出し、ゆう度の大きいセルを所定数抽出する抽出ステップと、
前記抽出ステップにおいてゆう度が算出されるセルの配分を制御する配分ステップと、
前記抽出された所定数のセルのうち、所定の閾値を超えるゆう度を有するセルに対応する2次元ベクトルを検出する検出ステップと、
前記検出ステップにおいて検出された2次元ベクトルから目標の軌跡を生成する軌跡生成ステップと、
を具備する目標検出方法。
【請求項5】
前記配分ステップでは、前記粒子フィルタの全てのセルにゆう度を与える請求項4記載の目標検出方法。
【請求項6】
前記2次元ベクトルは、前記レーダ反射信号の反射距離及び周波数からなる請求項4記載の目標検出方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−117845(P2011−117845A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−275777(P2009−275777)
【出願日】平成21年12月3日(2009.12.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月3日(2009.12.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]