
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信信号から目標を検出する目標検出装置に関し、特に2次元離散ウェーブレット変換(以下、「DWT;Discrete Wavelet Transform」と略する)を用いて目標を検出する技術に関する。
【背景技術】
【0002】
従来、例えばレーダ装置に備えられ、送信したパルス信号が目標で反射されて戻ってきた反射波を受信し、受信した反射波に基づき目標を検出する目標検出装置が知られている。このような目標検出装置においては、複数の反射波(ヒット)を受信して積分し、SN比(信号対雑音電力比;Signal to Noise Ratio)を向上させることが行われている。しかしながら、高速で動く目標(以下、「高速目標」という)に対しては、目標のレンジ方向のずれによって積分できるヒット数に上限があるので、積分によるSN比の向上にも限界があり、目標の検出性能に劣る。
【0003】
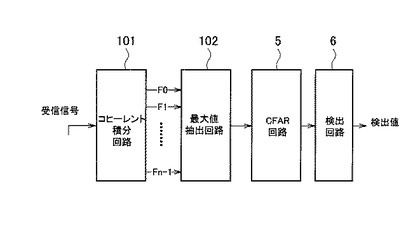
図15は、従来の目標検出装置の構成を示すブロック図である。この目標検出装置は、コヒーレント積分回路101、最大値抽出回路102、および一定誤警報率(以下、「CFAR:Constant False Alarm Rate」という)回路5および検出回路6を備えている。
【0004】
この目標検出装置は、以下のように動作する。すなわち、図示しないアンテナで反射波を受信することによって得られた受信信号は、コヒーレント積分回路101に送られる。コヒーレント積分回路101は、受信信号をコヒーレント積分、つまり高速フーリエ変換(以下、「FFT;Fast Fourier Transform」と略する)して、最大値抽出回路102に送る。最大値抽出回路102は、コヒーレント積分回路101から送られてくる信号から最大値を抽出し、CFAR回路5に送る。
【0005】
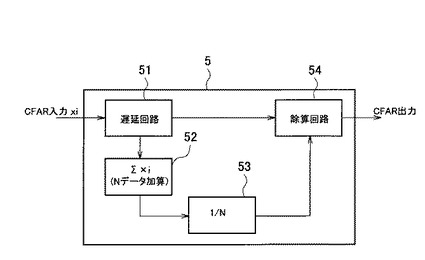
CFAR回路5は、最大値抽出回路102から送られてくる信号に対し、誤警報確率を一定の低さに抑えた信号を生成し、検出回路6に送る。なお、CFARについては、例えば非特許文献1に説明されている。図16は、CFAR回路5の一例として、相加平均で規格化を行うリニアCFAR回路の構成を示すブロック図である。CFAR回路5は、遅延回路51、加算回路52、平均化処理回路53および除算回路54から構成されている。
【0006】
遅延回路51は、入力された信号xiを遅延させた後、加算回路52および除算回路54に送る。加算回路52は、一定期間に遅延回路51から送られてくるN個のデータを加算し、平均化処理回路53に送る。平均化処理回路53は、加算回路52から送られてくるN個のデータの平均値を算出し、除算回路54に送る。除算回路54は、遅延回路51から送られてくるデータを平均化処理回路53から送られてくる平均値で除算し、除算結果をCFAR出力として検出回路6に送る。なお、CFAR回路5は、相乗平均で規格化を行う対数CFAR回路によって実現される場合もある。
【0007】
検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【非特許文献1】関根、“レーダ信号処理技術”、電子情報通信学会、pp.96-106(1991)
【発明の開示】
【発明が解決しようとする課題】
【0008】
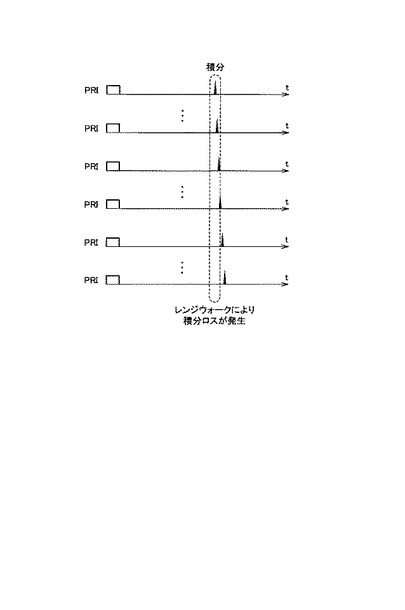
しかしながら、上述した従来の目標検出装置には次のような問題がある。図17は、複数のPRI(パルス繰返し周期:Pulse Repetition Interval)の各々において受信信号に現れる目標の様子を示す。高速目標の場合やレンジセル分解能に比べて目標速度が大きい場合には、レンジセルからのずれであるレンジウォークが発生して積分ロスが生じ、目標検出性能が劣化するという問題がある。また、高速目標が小目標である場合には、CPI(コヒーレント処理周期;Coherent Processing Interval)内のみの積分処理ではSN比が不足して、目標を検出できない場合がある。
【0009】
本発明は、上述した問題を解消するためになされたものであり、その課題は、高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するために、第1の発明は、入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、2次元DWT回路の出力に基づき目標を検出することを特徴とする。
【0011】
また、第2の発明は、第1の発明において、2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdのいずれか1つを用いて目標を検出することを特徴とする。
【0012】
また、第3の発明は、第1の発明において、2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdの最大値を用いて目標を検出することを特徴とする。
【0013】
また、第4の発明は、第1乃至第3のいずれか1項記載の発明において、2次元DWT回路から出力されるウェーブレット展開係数の最大値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする。
【0014】
また、第5の発明は、第1乃至第3のいずれか1項記載の発明において、2次元DWT回路から出力されるウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までの各々について、該極値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする。
【0015】
また、第6の発明は、入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、CPI毎FFT回路によるフーリエ変換により得られたCPI毎のレンジ−クロスレンジ軸またはレンジ−角度軸上の目標位置を示すフレームを生成し、該フレーム間の最大値または加算した信号を生成するフレーム間ビデオ積分回路と、フレーム間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、2次元DWT回路の出力に所定の処理を施すことにより目標を検出することを特徴とする。
【0016】
さらに、第7の発明は、第1乃至第6のいずれか1項記載の発明において、2次元DWT回路の出力に基づき目標が存在する目標範囲を抽出する目標範囲抽出回路と、目標範囲抽出回路で抽出された目標範囲に対する送受信に得られた入力データを高速フーリエ変換するFFT回路とを備え、FFT回路に出力に所定の処理を施すことにより目標を検出することを特徴とする。
【発明の効果】
【0017】
本発明の目標検出装置によれば、高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供することができる。
【0018】
具体的には、第1の発明によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解できるため、信号に応じて最も効率のよい抽出方法をあらかじめ選定することにより、効率よく信号を抽出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0019】
また、第2の発明によれば、2次元DWTにより分解された信号のうち、目標信号の検出に最も効率のよい信号を用いて目標を検出することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0020】
また、第3の発明によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解し、その最大値を用いるために、信号の時間−周波数軸上における広がりがわからなくても、自動的に最も効率のよい抽出方法を選定することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0021】
また、第4の発明によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0022】
また、第5の発明によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0023】
また、第6の発明によれば、フレーム間を加算したデータを用いて、2次元DWTにより目標信号を加算し、目標を検出するように構成したので、目標を検出できる確率を向上させることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0024】
また、第7の発明によれば、目標範囲を抽出して、限定した範囲で多パルス積分することにより、SN比を向上させることができるので、効率よく目標を検出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。なお、背景技術の欄で説明した従来の目標検出装置と同一または相当する構成部分には、背景技術の欄で使用した符号と同一の符号を付して説明を省略または簡略化する。
【実施例1】
【0026】
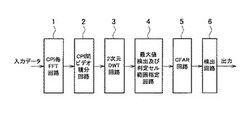
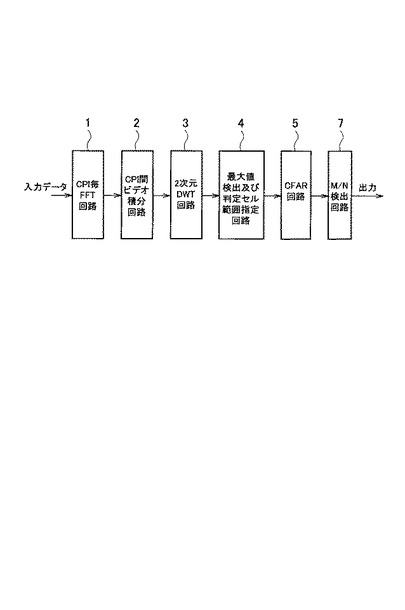
図1は、本発明の実施例1に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、CPI毎FFT回路1、CPI間ビデオ積分回路2、2次元DWT回路3、最大値検出及び判定セル範囲指定回路4、CFAR回路5および検出回路6を備えている。これらの構成要素のうち、CFAR回路5および検出回路6は、背景技術の欄で説明したそれらと同じである。
【0027】
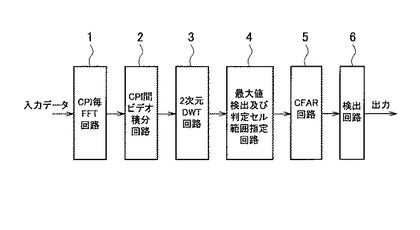
CPI毎FFT回路1は、入力データをCPI毎に高速フーリエ変換(FFT)する。これにより、図2(a)に示すようなレンジ−ドップラ周波数軸上、つまり時間−周波数軸上の目標位置を表すデータが得られる。このCPI毎FFT回路1で得られた目標位置を表すデータは、CPI間ビデオ積分回路2に送られる。
【0028】
CPI間ビデオ積分回路2は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存し、保存したCPI毎の目標位置を表すデータに対して最大値抽出または加算演算を実施し、図2(b)に示すような合成CPIデータを生成する。CPI間ビデオ積分回路2で生成された合成CPIデータは、2次元DWT回路3に送られる。
【0029】
2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる合成CPIデータの目標信号部分を積分するために、合成CPIデータに対して2次元DWTを実施する。
【0030】
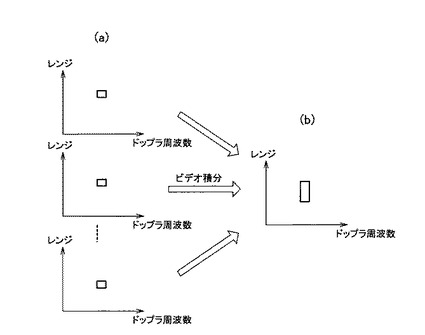
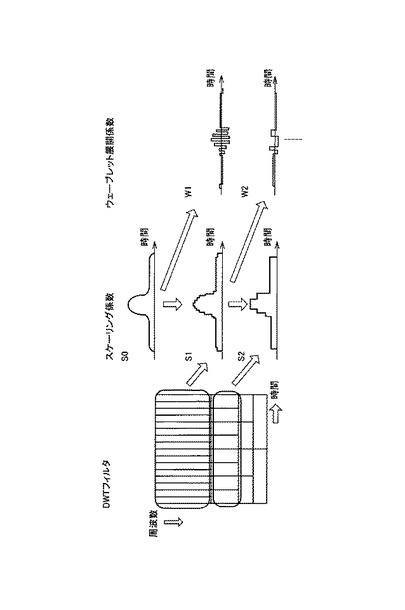
ここで、ウェーブレット変換(DWT)の原理を説明する。まず、1次元DWTについて説明する。目標を検出する際に用いられるウェーブレット変換は、図3(a)に示すような入力データに対し、ウェーブレット変換核(例えばメキシカンハット等)のパラメータ(シフトRやスケールf)を変化させながら相関処理を行うことによりフィッティングさせ、、図3(b)に示すような、高いウェーブレット変換データの出力を得る処理と言うことができる。
【0031】
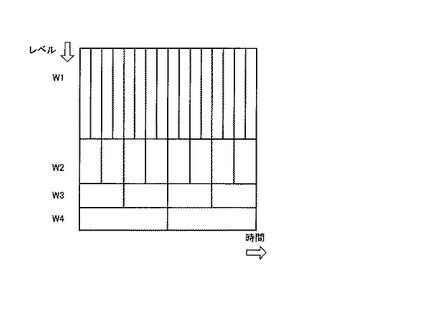
これを離散的に表現すると、図4に示すようになる。すなわち、ウェーブレット変換は、入力信号波形をスケーリング係数とウェーブレット展開関数で近似するものであり、レベルにより近似の程度が異なる。これをフィルタで表すと、図5に示すようなフィルタに相当し、高い周波数では細かい時間分解能で抽出し、低い周波数では粗い時間分解能で抽出することに相当する。このフィルタの特性は、例えば『中野他、“ウェーブレットによる信号処理と画像処理”、共立出版株式会社、pp.49-70、pp.101-110 (1999)』に説明されているように、下式(1)〜(3)で表すことができる。
【数1】

【0032】
ここで、
fj:jレベルの近似関数(j=1〜J)
gj:jレベルの展開関数
sk:スケーリング展開係数(k=1〜K)
wk:ウェーブレット展開係数
φ :スケーリング関数
ψ :マザー・ウェーブレット関数
pk:マザー・ウェーブレット関数により決まる数列
* :複素共役
ここで、(5)式に示すwは、各レベルjにおける近似関数と実際の波形との差分を表す成分であり、ウェーブレット展開係数を表す。ウェーブレット展開係数には信号成分が含まれるため、このウェーブレット展開係数を用いて、信号を抽出することができる。
【0033】
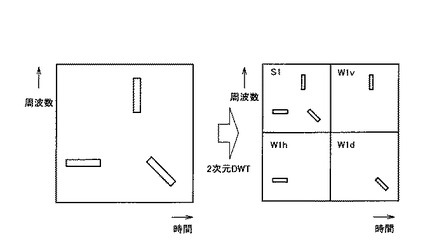
次に、本発明の実施例1で使用される2次元離散ウェーブレット変換について説明する。2次元離散ウェーブレット変換は、2軸の各軸方向に対して1次元離散ウェーブレット変換を実施するものであり、例えば『中野他、‘ウェーブレットによる信号処理と画像処理’、共立出版株式会社、pp.71-73(1999)』に説明されているように、下式(7)〜(10)で表すことができる。
【数2】
【0034】
ここで、添字を省略すると、
s;スケーリング展開係数
w;ウェーブレット展開係数
p;マザー・ウェーブレット関数により決まる数列
q;(k;ウェーブレットを表す数列の番号)
j;ウェーブレット展開レベル
m、n;2次元軸の番号
*;複素共役
上添字がh、vおよびdの場合のウェーブレット展開係数をそれぞれ、wh、wvおよびwdとする。ウェーブレット展開係数のwh、wvおよびwdは、それぞれ、横軸方向に連続した信号、縦軸方向に連続した信号、および対角線方向に連続した信号がある場合に、値が大きくなる性質を持っている。この様子を図6に示す。2次元DWT回路3は、2次元離散ウェーブレット変換により得られたウェーブレット展開係数を、最大値検出及び判定セル範囲指定回路4に送る。
【0035】
最大値検出及び判定セル範囲指定回路4は、上述した性質を利用して、図2(b)に示した信号に対してウェーブレット展開係数の最大値を抽出し、CFARの判定セル範囲を指定する。この最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくる判定セル範囲で、CFAR処理を実施する。
【0036】
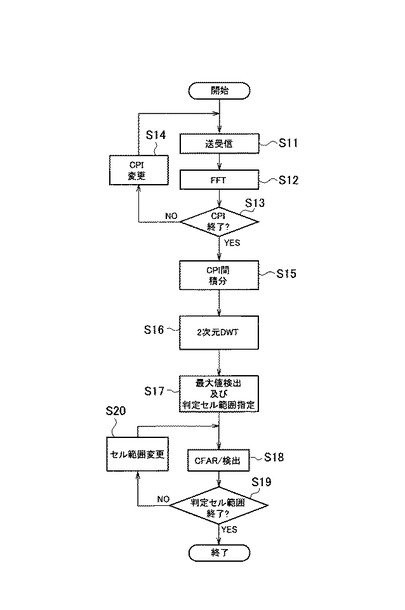
次に、上記のように構成される本発明の実施例1に係る目標検出装置の動作を、図7に示すフローチャートを参照しながら説明する。
【0037】
まず、信号の送受信が行われる(ステップS11)。次いで、高速フーリエ変換(FFT)が行われる(ステップS12)。すなわち、CPI毎FFT回路1は、ステップS11における送受信により得られた1つのCPIにおける入力データを高速フーリエ変換し、CPI間ビデオ積分回路2に送る。CPI間ビデオ積分回路2は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存する。
【0038】
次いで、すべてのCPIが終了したかどうかが調べられる(ステップS13)。ステップS13において、すべてのCPIが終了していないことが判断されると、次いで、CPIの変更が行われる(ステップS14)。すなわち、次のCPIに対する処理が行われるように状態が変更される。その後、ステップS11に戻り、上述した処理が繰り返される。
【0039】
ステップS13において、すべてのCPIが終了したことが判断されると、次いで、CPI間積分が行われる(ステップS15)。すなわち、CPI間ビデオ積分回路2は、CPI毎FFT回路1から受け取って保存されているCPI毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図2(b)に示すような合成CPIデータを生成し、2次元DWT回路3に送る。
【0040】
次いで、2次元DWTが行われる(ステップS16)。すなわち、2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる合成CPIデータに対して2次元DWTを実施する。2次元DWTにより得られたウェーブレット展開係数は最大値検出及び判定セル範囲指定回路4に送られる。
【0041】
次いで、最大値検出及び判定セル範囲指定が行われる(ステップS17)。すなわち、最大値検出及び判定セル範囲指定回路4は、図2(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表すデータをCFAR回路5に送る。
【0042】
次いで、CFAR処理および検出処理が行われる(ステップS18)。すなわち、CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくるデータによって示される判定セル範囲でCFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【0043】
次いで、すべての判定セル範囲についての処理が終了したかどうかが調べられる(ステップS19)。ステップS19において、すべての判定セル範囲についての処理が終了していないことが判断されると、次いで、セル範囲の変更が行われる(ステップS20)。すなわち、次のセル範囲に対する処理が行われるように状態が変更される。その後、ステップS18に戻り、上述した処理が繰り返される。ステップS19において、すべての判定セル範囲についての処理が終了したことが判断されると、目標検出装置の動作は終了する。
【0044】
以上説明したように本発明の実施例1に係る目標検出装置によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解できるため、信号に応じて最も効率のよい抽出方法をあらかじめ選定することにより、効率よく信号を抽出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例2】
【0045】
本発明の実施例2に係る目標検出装置は、実施例1に係る目標検出装置において、目標信号の広がりの方向をあらかじめ予測して、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのいずれかを選定するようにしたものである。
【0046】
実施例2に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4に対して2次元DWTのウェーブレット展開係数のwh、wvまたはwdのいずれかを選定するように設定されることを除けば、図1に示し実施例1に係る目標検出装置の構成と同じである。
【0047】
最大値検出及び判定セル範囲指定回路4は、2次元DWT回路3から送られてくるウェーブレット展開係数のうち、あらかじめ設定されているウェーブレット展開係数wh、wvまたはwdのいずれかを用いてCFARの判定セル範囲を指定する。この最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。
【0048】
上記のように構成される実施例2に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0049】
以上説明したように本発明の実施例2に係る目標検出装置によれば、2次元DWTにより分解された信号のうち、目標信号の検出に最も効率のよい信号を用いて目標を検出することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例3】
【0050】
本発明の実施例3に係る目標検出装置は、実施例1に係る目標検出装置において、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのうち、最大値が存在するウェーブレット展開係数を用いるようにしたものである。
【0051】
実施例3に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4が、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのうち、最大値が存在するウェーブレット展開係数を用いて判定セル範囲を指定することを除けば、図1に示し実施例1に係る目標検出装置の構成と同じである。
【0052】
最大値検出及び判定セル範囲指定回路4は、上述したように、2次元DWT回路3から送られてくるウェーブレット展開係数のうち、最大値が存在するウェーブレット展開係数を用いて判定セル範囲を指定する。最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。
【0053】
上記のように構成される実施例3に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0054】
以上説明したように本発明の実施例3に係る目標検出装置によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解し、その最大値を用いるために、信号の時間−周波数軸上における広がりがわからなくても、自動的に最も効率のよい抽出方法を選定することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例4】
【0055】
本発明の実施例4に係る目標検出装置は、目標信号が隣接セルに跨る可能性がある場合に、2次元DWTのウェーブレット展開係数の最大値を用いて、その周りのN=N1×N2個(N、N1およびN2は正の整数)のセルで、M個(Mは正の整数、M≦N)以上のセルがスレショルドを越えれば、目標である旨を検出するようにしたものである。
【0056】
図8は、実施例4に係る目標検出装置の構成を示すブロック図である。実施例4に係る目標検出装置は、図1に示した目標検出装置の検出回路6がM/N検出回路7に置き換えられて構成されている。
【0057】
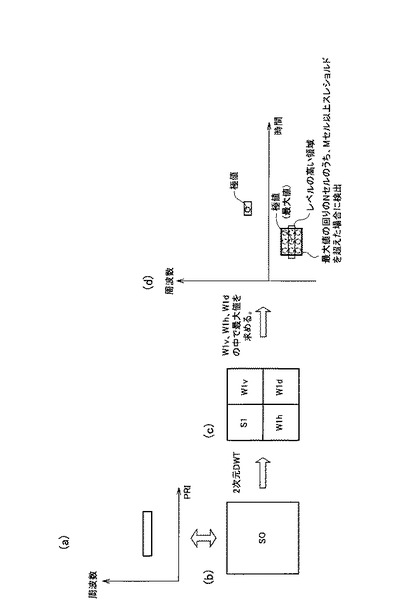
図9は、実施例4に係る目標検出装置の動作を説明するための図である。まず、CPI間ビデオ積分回路2は、図9(a)に示すようなPRI−周波数軸上、つまり時間−周波数軸上の合成CPIデータを生成して2次元DWT回路3に送る。2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる信号を、図9(b)に示すような入力データとして2次元離散ウェーブレット変換を行い、図9(c)に示すような信号を最大値検出及び判定セル範囲指定回路4に送る。
【0058】
最大値検出及び判定セル範囲指定回路4は、ウェーブレット展開係数W1v、W1hおよびW1dの中から最大値を求め、図9(d)に示すように、その最大値の周囲のN1×N2個の範囲のセルを表す信号を、CFAR回路5を介してM/N検出回路7に送る。
【0059】
M/N検出回路7は、最大値検出及び判定セル範囲指定回路4からCFAR回路5を介して送られてくるN個のセルを表す信号を所定のスレショルドレベルと比較し、M個以上が所定のスレショルドレベルを超えていれば、目標である旨を検出し、この検出結果を検出値として出力する。
【0060】
上記のように構成される実施例4に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0061】
以上説明したように本発明の実施例4に係る目標検出装置によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例5】
【0062】
本発明の実施例5に係る目標検出装置は、複数目標の検出に対応するために、2次元DWTのウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までを抽出し、各極値において、その周りのN=N1×N2個のセルで、M個以上のセルがスレショルドを越えれば、目標である旨を検出するようにしたものである。
【0063】
実施例5に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7の動作を除けば、図8に示し実施例4に係る目標検出装置の構成と同じである。
【0064】
この実施例5に係る目標検出装置の動作を、上述した図9を参照しながら説明する。まず、CPI間ビデオ積分回路2は、図9(a)に示すようなPRI−周波数軸上、つまり時間−周波数軸上の合成CPIデータを生成して2次元DWT回路3に送る。2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる信号を、図9(b)に示すような入力データとして2次元離散ウェーブレット変換を行い、図9(c)に示すような信号を最大値検出及び判定セル範囲指定回路4に送る。
【0065】
最大値検出及び判定セル範囲指定回路4は、ウェーブレット展開係数W1v、W1hおよびW1dの中から最大値を求め、図9(d)に示すように、複数のウェーブレット展開係数の極値の最大値からL番目までの各極値の周囲のN1×N2(=N)の範囲のセルを表す信号を、CFAR回路5を介してM/N検出回路7に送る。
【0066】
M/N検出回路7は、各極値について、最大値検出及び判定セル範囲指定回路4からCFAR回路5を介して送られてくるN個のセルを表す信号を所定のスレショルドレベルと比較し、M個以上が所定のスレショルドレベルを超えていれば、目標である旨を検出し、この検出結果を検出値として出力する。
【0067】
上記のように構成される実施例5に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0068】
以上説明したように本発明の実施例5に係る目標検出装置によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出でき、かつ、複数の極値を用いるので、複数の目標を検出する確率をあげることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例6】
【0069】
本発明の実施例6に係る目標検出装置は、実施例1に係る目標検出装置のような複数CPIの最大値抽出または加算データではなく、目標位置(レンジ−クロスレンジ軸またはレンジ−角度軸)を示す複数フレーム間の最大値抽出または加算したデータに対して、2次元DWTにより目標信号を加算して、目標を検出するようにしたものである。
【0070】
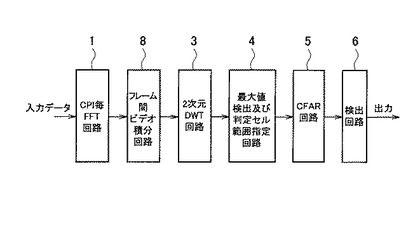
図10は、本発明の実施例6に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、実施例1に係る目標検出装置のCPI間ビデオ積分回路2がフレーム間ビデオ積分回路8に置き換えられて構成されている。
【0071】
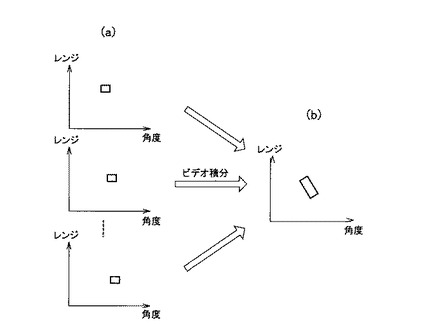
CPI毎FFT回路1は、入力データをCPI毎に高速フーリエ変換(FFT)する。これにより、図11(a)に示すようなレンジ−角度軸上の目標位置を表すデータが得られる。CPI毎FFT回路1で得られた目標位置を表すデータは、フレーム間ビデオ積分回路8に送られる。
【0072】
フレーム間ビデオ積分回路8は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存し、この保存したCPI毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図11(b)に示すような合成CPIデータを生成する。フレーム間ビデオ積分回路8で生成された合成CPIデータは、2次元DWT回路3に送られる。
【0073】
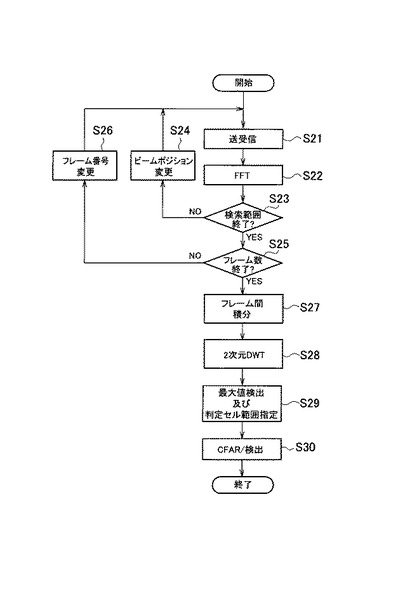
次に、上記のように構成される本発明の実施例6に係る目標検出装置の動作を、図12に示すフローチャートを参照しながら説明する。
【0074】
まず、送受信が行われる(ステップS21)。次いで、高速フーリエ変換(FFT)が行われる(ステップS12)。すなわち、CPI毎FFT回路1は、ステップS11における送受信により得られた1つのCPIにおける入力データを高速フーリエ変換し、レンジ−角度軸上の目標位置を表すデータを生成してフレーム間ビデオ積分回路8に送る。フレーム間ビデオ積分回路8は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存する。
【0075】
次いで、捜索範囲が終了したかどうかが調べられる(ステップS23)。ステップS23において、捜索範囲が終了していないことが判断されると、次いで、ビームポジションの変更が行われる(ステップS24)。すなわち、次のビームポジションに対する処理が行われるように捜索範囲が変更される。その後、ステップS21に戻り、上述した処理が繰り返される。
【0076】
ステップS23において、捜索範囲が終了したことが判断されると、次いで、フレーム数が終了したかどうかが調べられる(ステップS25)。ステップS25において、フレーム数が終了していないことが判断されると、次いで、フレーム番号の変更が行われる(ステップS26)。すなわち、次のフレームに対する処理が行われるようにフレーム番号が変更される。その後、ステップS21に戻り、上述した処理が繰り返される。
【0077】
ステップS25において、フレーム数が終了したことが判断されると、次いで、フレーム間積分が行われる(ステップS27)。すなわち、フレーム間ビデオ積分回路8は、CPI毎FFT回路1から受け取って保存されているフレーム毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図11(b)に示すような合成CPIデータを生成して2次元DWT回路3に送る。
【0078】
次いで、2次元DWTが行われる(ステップS28)。すなわち、2次元DWT回路3は、フレーム間ビデオ積分回路8から送られてくる合成CPIデータに対して2次元DWTを実施することによって得られたウェーブレット展開係数を最大値検出及び判定セル範囲指定回路4に送る。
【0079】
次いで、最大値検出及び判定セル範囲指定が行われる(ステップS29)。すなわち、最大値検出及び判定セル範囲指定回路4は、図11(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表すデータをCFAR回路5に送る。
【0080】
次いで、CFAR処理および検出処理が行われる(ステップS18)。すなわち、CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくるデータによって示される判定セル範囲で、CFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【0081】
以上説明したように本発明の実施例6に係る目標検出装置によれば、フレーム間を加算したデータを用いて、2次元DWTにより目標信号を加算し、目標を検出するように構成したので、目標を検出できる確率を向上させることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例7】
【0082】
上述した実施例1〜実施例6に係る目標検出装置は、2次元DWTをそのまま用いて目標を検出するように構成したが、本発明の実施例7に係る目標検出装置は、2次元DWTの結果により目標範囲を抽出し、その抽出され範囲内で再度、信号の送受信を行い、効率的に積分して、目標をより高い確度で検出するようにしたものである。
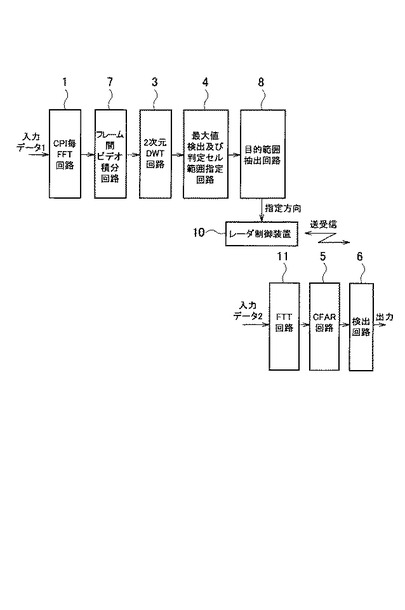
【0083】
図13は、本発明の実施例7に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、実施例6に係る目標検出装置の最大値検出及び判定セル範囲指定回路4とCFAR回路5との間に、目標範囲抽出回路9、レーダ制御装置10およびFFT回路11が追加されて構成されている。
【0084】
目標範囲抽出回路9は、最大値検出及び判定セル範囲指定回路4から出力される信号に基づき目標範囲を抽出する。この目標範囲抽出回路9で抽出された目標範囲を表す信号は、レーダ制御装置10に送られる。
【0085】
レーダ制御装置10は、目標範囲抽出回路9から送られてくる信号によって示される目標範囲に向けて信号の送受信を行う。このレーダ制御装置10による送受信によって目標範囲の目標から送られてくる受信信号は、入力データ2としてFFT回路11に入力される。FFT回路11は、入力データ2を高速フーリエ変換し、CFAR回路5に送る。
【0086】
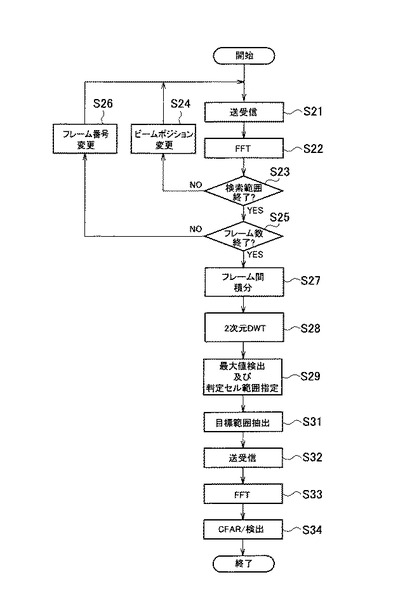
次に、上記のように構成される本発明の実施例1に係る目標検出装置の動作を、図14に示すフローチャートを参照しながら説明する。なお、図12に示した実施例6に係る目標検出装置の動作を示すフローチャートと同一の処理を行うステップには、図12で使用した符号と同一の符号を付して説明を省略する。
【0087】
まず、ステップS21〜ステップS28の処理は、図12に示した実施例6に係る目標検出装置の動作を示すフローチャートに示した処理と同じである。ステップS29では、最大値検出及び判定セル範囲指定が行われる。すなわち、最大値検出及び判定セル範囲指定回路4は、図11(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表す信号を目標範囲抽出回路9に送る。
【0088】
次いで、目標範囲抽出が行われる(ステップS31)。すなわち、目標範囲抽出回路9は、最大値検出及び判定セル範囲指定回路4から送られてくる信号に基づき目標範囲を抽出し、その旨を表す信号をレーダ制御装置10に送る。
【0089】
次いで、送受信が行われる(ステップS32)。すなわち、レーダ制御装置10は、目標範囲抽出回路9から送られてくる信号によって示される目標範囲に向けて信号を送受信する。このレーダ制御装置10による送受信により、目標範囲の目標で反射された受信信号は、入力データ2としてFFT回路11に入力される。
【0090】
次いで、高速フーリエ変換(FFT)が行われる(ステップS33)。すなわち、FFT回路11は、入力データ2をフーリエ変換し、その結果をCFAR回路5に送る。
【0091】
次いで、CFAR処理および検出処理が行われる(ステップS34)。すなわち、CFAR回路5は、FFT回路11から送られてくる信号にCFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、この検出した結果を検出値として出力する。
【0092】
以上説明したように本発明の実施例7に係る目標検出装置によれば、目標範囲を抽出して、限定した範囲で多パルス積分することにより、SN比を向上させることができるので、効率よく目標を検出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0093】
なお、上述した実施例1〜実施例6に係る目標検出装置においては、2次元DWTのウェーブレット展開係数は、入力信号を1回だけウェーブレット変換するように構成したが、複数回展開するように構成することもできる。
【産業上の利用可能性】
【0094】
本発明は、高速で移動する小目標を検出して追尾するレーダ装置または受信装置などに利用可能である。
【図面の簡単な説明】
【0095】
【図1】本発明の実施例1に係る目標検出装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る目標検出装置において行われるCPI間ビデオ積分を説明するための図である。
【図3】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図4】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換のウェーブレット展開係数を示す図である。
【図5】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換の時間−周波数フィルタを示す図である。
【図6】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換の入出力信号を説明するための図である。
【図7】本発明の実施例1に係る目標検出装置の動作を説明するためのフローチャートである。
【図8】本発明の実施例4に係る目標検出装置の構成を示すブロック図である。
【図9】本発明の実施例4に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図10】本発明の実施例6に係る目標検出装置の構成を示すブロック図である。
【図11】本発明の実施例6に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図12】本発明の実施例6に係る目標検出装置の動作を説明するためのフローチャートである。
【図13】本発明の実施例7に係る目標検出装置の構成を示すブロック図である。
【図14】本発明の実施例7に係る目標検出装置の動作を説明するためのフローチャートである。
【図15】従来の目標検出装置の構成を示すブロック図である。
【図16】従来の目標検出装置で使用されるCFAR回路の詳細を示すブロック図である。
【図17】従来の目標検出装置において送受信される複数のPRIの各々において、受信信号に現れる目標の様子を示す図である。
【符号の説明】
【0096】
1 CPI毎FFT回路
2 CPI間ビデオ積分回路
3 2次元DWT回路
4 最大値及び判定セル範囲指定回路
5 CFAR回路
6 検出回路
7 M/N検出回路
8 フレーム間ビデオ積分回路
9 目標範囲抽出回路
10 レーダ制御装置
11 FFT回路
【技術分野】
【0001】
本発明は、受信信号から目標を検出する目標検出装置に関し、特に2次元離散ウェーブレット変換(以下、「DWT;Discrete Wavelet Transform」と略する)を用いて目標を検出する技術に関する。
【背景技術】
【0002】
従来、例えばレーダ装置に備えられ、送信したパルス信号が目標で反射されて戻ってきた反射波を受信し、受信した反射波に基づき目標を検出する目標検出装置が知られている。このような目標検出装置においては、複数の反射波(ヒット)を受信して積分し、SN比(信号対雑音電力比;Signal to Noise Ratio)を向上させることが行われている。しかしながら、高速で動く目標(以下、「高速目標」という)に対しては、目標のレンジ方向のずれによって積分できるヒット数に上限があるので、積分によるSN比の向上にも限界があり、目標の検出性能に劣る。
【0003】
図15は、従来の目標検出装置の構成を示すブロック図である。この目標検出装置は、コヒーレント積分回路101、最大値抽出回路102、および一定誤警報率(以下、「CFAR:Constant False Alarm Rate」という)回路5および検出回路6を備えている。
【0004】
この目標検出装置は、以下のように動作する。すなわち、図示しないアンテナで反射波を受信することによって得られた受信信号は、コヒーレント積分回路101に送られる。コヒーレント積分回路101は、受信信号をコヒーレント積分、つまり高速フーリエ変換(以下、「FFT;Fast Fourier Transform」と略する)して、最大値抽出回路102に送る。最大値抽出回路102は、コヒーレント積分回路101から送られてくる信号から最大値を抽出し、CFAR回路5に送る。
【0005】
CFAR回路5は、最大値抽出回路102から送られてくる信号に対し、誤警報確率を一定の低さに抑えた信号を生成し、検出回路6に送る。なお、CFARについては、例えば非特許文献1に説明されている。図16は、CFAR回路5の一例として、相加平均で規格化を行うリニアCFAR回路の構成を示すブロック図である。CFAR回路5は、遅延回路51、加算回路52、平均化処理回路53および除算回路54から構成されている。
【0006】
遅延回路51は、入力された信号xiを遅延させた後、加算回路52および除算回路54に送る。加算回路52は、一定期間に遅延回路51から送られてくるN個のデータを加算し、平均化処理回路53に送る。平均化処理回路53は、加算回路52から送られてくるN個のデータの平均値を算出し、除算回路54に送る。除算回路54は、遅延回路51から送られてくるデータを平均化処理回路53から送られてくる平均値で除算し、除算結果をCFAR出力として検出回路6に送る。なお、CFAR回路5は、相乗平均で規格化を行う対数CFAR回路によって実現される場合もある。
【0007】
検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【非特許文献1】関根、“レーダ信号処理技術”、電子情報通信学会、pp.96-106(1991)
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した従来の目標検出装置には次のような問題がある。図17は、複数のPRI(パルス繰返し周期:Pulse Repetition Interval)の各々において受信信号に現れる目標の様子を示す。高速目標の場合やレンジセル分解能に比べて目標速度が大きい場合には、レンジセルからのずれであるレンジウォークが発生して積分ロスが生じ、目標検出性能が劣化するという問題がある。また、高速目標が小目標である場合には、CPI(コヒーレント処理周期;Coherent Processing Interval)内のみの積分処理ではSN比が不足して、目標を検出できない場合がある。
【0009】
本発明は、上述した問題を解消するためになされたものであり、その課題は、高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するために、第1の発明は、入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、2次元DWT回路の出力に基づき目標を検出することを特徴とする。
【0011】
また、第2の発明は、第1の発明において、2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdのいずれか1つを用いて目標を検出することを特徴とする。
【0012】
また、第3の発明は、第1の発明において、2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdの最大値を用いて目標を検出することを特徴とする。
【0013】
また、第4の発明は、第1乃至第3のいずれか1項記載の発明において、2次元DWT回路から出力されるウェーブレット展開係数の最大値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする。
【0014】
また、第5の発明は、第1乃至第3のいずれか1項記載の発明において、2次元DWT回路から出力されるウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までの各々について、該極値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする。
【0015】
また、第6の発明は、入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、CPI毎FFT回路によるフーリエ変換により得られたCPI毎のレンジ−クロスレンジ軸またはレンジ−角度軸上の目標位置を示すフレームを生成し、該フレーム間の最大値または加算した信号を生成するフレーム間ビデオ積分回路と、フレーム間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、2次元DWT回路の出力に所定の処理を施すことにより目標を検出することを特徴とする。
【0016】
さらに、第7の発明は、第1乃至第6のいずれか1項記載の発明において、2次元DWT回路の出力に基づき目標が存在する目標範囲を抽出する目標範囲抽出回路と、目標範囲抽出回路で抽出された目標範囲に対する送受信に得られた入力データを高速フーリエ変換するFFT回路とを備え、FFT回路に出力に所定の処理を施すことにより目標を検出することを特徴とする。
【発明の効果】
【0017】
本発明の目標検出装置によれば、高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供することができる。
【0018】
具体的には、第1の発明によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解できるため、信号に応じて最も効率のよい抽出方法をあらかじめ選定することにより、効率よく信号を抽出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0019】
また、第2の発明によれば、2次元DWTにより分解された信号のうち、目標信号の検出に最も効率のよい信号を用いて目標を検出することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0020】
また、第3の発明によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解し、その最大値を用いるために、信号の時間−周波数軸上における広がりがわからなくても、自動的に最も効率のよい抽出方法を選定することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0021】
また、第4の発明によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0022】
また、第5の発明によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0023】
また、第6の発明によれば、フレーム間を加算したデータを用いて、2次元DWTにより目標信号を加算し、目標を検出するように構成したので、目標を検出できる確率を向上させることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0024】
また、第7の発明によれば、目標範囲を抽出して、限定した範囲で多パルス積分することにより、SN比を向上させることができるので、効率よく目標を検出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。なお、背景技術の欄で説明した従来の目標検出装置と同一または相当する構成部分には、背景技術の欄で使用した符号と同一の符号を付して説明を省略または簡略化する。
【実施例1】
【0026】
図1は、本発明の実施例1に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、CPI毎FFT回路1、CPI間ビデオ積分回路2、2次元DWT回路3、最大値検出及び判定セル範囲指定回路4、CFAR回路5および検出回路6を備えている。これらの構成要素のうち、CFAR回路5および検出回路6は、背景技術の欄で説明したそれらと同じである。
【0027】
CPI毎FFT回路1は、入力データをCPI毎に高速フーリエ変換(FFT)する。これにより、図2(a)に示すようなレンジ−ドップラ周波数軸上、つまり時間−周波数軸上の目標位置を表すデータが得られる。このCPI毎FFT回路1で得られた目標位置を表すデータは、CPI間ビデオ積分回路2に送られる。
【0028】
CPI間ビデオ積分回路2は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存し、保存したCPI毎の目標位置を表すデータに対して最大値抽出または加算演算を実施し、図2(b)に示すような合成CPIデータを生成する。CPI間ビデオ積分回路2で生成された合成CPIデータは、2次元DWT回路3に送られる。
【0029】
2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる合成CPIデータの目標信号部分を積分するために、合成CPIデータに対して2次元DWTを実施する。
【0030】
ここで、ウェーブレット変換(DWT)の原理を説明する。まず、1次元DWTについて説明する。目標を検出する際に用いられるウェーブレット変換は、図3(a)に示すような入力データに対し、ウェーブレット変換核(例えばメキシカンハット等)のパラメータ(シフトRやスケールf)を変化させながら相関処理を行うことによりフィッティングさせ、、図3(b)に示すような、高いウェーブレット変換データの出力を得る処理と言うことができる。
【0031】
これを離散的に表現すると、図4に示すようになる。すなわち、ウェーブレット変換は、入力信号波形をスケーリング係数とウェーブレット展開関数で近似するものであり、レベルにより近似の程度が異なる。これをフィルタで表すと、図5に示すようなフィルタに相当し、高い周波数では細かい時間分解能で抽出し、低い周波数では粗い時間分解能で抽出することに相当する。このフィルタの特性は、例えば『中野他、“ウェーブレットによる信号処理と画像処理”、共立出版株式会社、pp.49-70、pp.101-110 (1999)』に説明されているように、下式(1)〜(3)で表すことができる。
【数1】
【0032】
ここで、
fj:jレベルの近似関数(j=1〜J)
gj:jレベルの展開関数
sk:スケーリング展開係数(k=1〜K)
wk:ウェーブレット展開係数
φ :スケーリング関数
ψ :マザー・ウェーブレット関数
pk:マザー・ウェーブレット関数により決まる数列
* :複素共役
ここで、(5)式に示すwは、各レベルjにおける近似関数と実際の波形との差分を表す成分であり、ウェーブレット展開係数を表す。ウェーブレット展開係数には信号成分が含まれるため、このウェーブレット展開係数を用いて、信号を抽出することができる。
【0033】
次に、本発明の実施例1で使用される2次元離散ウェーブレット変換について説明する。2次元離散ウェーブレット変換は、2軸の各軸方向に対して1次元離散ウェーブレット変換を実施するものであり、例えば『中野他、‘ウェーブレットによる信号処理と画像処理’、共立出版株式会社、pp.71-73(1999)』に説明されているように、下式(7)〜(10)で表すことができる。
【数2】
【0034】
ここで、添字を省略すると、
s;スケーリング展開係数
w;ウェーブレット展開係数
p;マザー・ウェーブレット関数により決まる数列
q;(k;ウェーブレットを表す数列の番号)
j;ウェーブレット展開レベル
m、n;2次元軸の番号
*;複素共役
上添字がh、vおよびdの場合のウェーブレット展開係数をそれぞれ、wh、wvおよびwdとする。ウェーブレット展開係数のwh、wvおよびwdは、それぞれ、横軸方向に連続した信号、縦軸方向に連続した信号、および対角線方向に連続した信号がある場合に、値が大きくなる性質を持っている。この様子を図6に示す。2次元DWT回路3は、2次元離散ウェーブレット変換により得られたウェーブレット展開係数を、最大値検出及び判定セル範囲指定回路4に送る。
【0035】
最大値検出及び判定セル範囲指定回路4は、上述した性質を利用して、図2(b)に示した信号に対してウェーブレット展開係数の最大値を抽出し、CFARの判定セル範囲を指定する。この最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくる判定セル範囲で、CFAR処理を実施する。
【0036】
次に、上記のように構成される本発明の実施例1に係る目標検出装置の動作を、図7に示すフローチャートを参照しながら説明する。
【0037】
まず、信号の送受信が行われる(ステップS11)。次いで、高速フーリエ変換(FFT)が行われる(ステップS12)。すなわち、CPI毎FFT回路1は、ステップS11における送受信により得られた1つのCPIにおける入力データを高速フーリエ変換し、CPI間ビデオ積分回路2に送る。CPI間ビデオ積分回路2は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存する。
【0038】
次いで、すべてのCPIが終了したかどうかが調べられる(ステップS13)。ステップS13において、すべてのCPIが終了していないことが判断されると、次いで、CPIの変更が行われる(ステップS14)。すなわち、次のCPIに対する処理が行われるように状態が変更される。その後、ステップS11に戻り、上述した処理が繰り返される。
【0039】
ステップS13において、すべてのCPIが終了したことが判断されると、次いで、CPI間積分が行われる(ステップS15)。すなわち、CPI間ビデオ積分回路2は、CPI毎FFT回路1から受け取って保存されているCPI毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図2(b)に示すような合成CPIデータを生成し、2次元DWT回路3に送る。
【0040】
次いで、2次元DWTが行われる(ステップS16)。すなわち、2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる合成CPIデータに対して2次元DWTを実施する。2次元DWTにより得られたウェーブレット展開係数は最大値検出及び判定セル範囲指定回路4に送られる。
【0041】
次いで、最大値検出及び判定セル範囲指定が行われる(ステップS17)。すなわち、最大値検出及び判定セル範囲指定回路4は、図2(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表すデータをCFAR回路5に送る。
【0042】
次いで、CFAR処理および検出処理が行われる(ステップS18)。すなわち、CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくるデータによって示される判定セル範囲でCFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【0043】
次いで、すべての判定セル範囲についての処理が終了したかどうかが調べられる(ステップS19)。ステップS19において、すべての判定セル範囲についての処理が終了していないことが判断されると、次いで、セル範囲の変更が行われる(ステップS20)。すなわち、次のセル範囲に対する処理が行われるように状態が変更される。その後、ステップS18に戻り、上述した処理が繰り返される。ステップS19において、すべての判定セル範囲についての処理が終了したことが判断されると、目標検出装置の動作は終了する。
【0044】
以上説明したように本発明の実施例1に係る目標検出装置によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解できるため、信号に応じて最も効率のよい抽出方法をあらかじめ選定することにより、効率よく信号を抽出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例2】
【0045】
本発明の実施例2に係る目標検出装置は、実施例1に係る目標検出装置において、目標信号の広がりの方向をあらかじめ予測して、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのいずれかを選定するようにしたものである。
【0046】
実施例2に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4に対して2次元DWTのウェーブレット展開係数のwh、wvまたはwdのいずれかを選定するように設定されることを除けば、図1に示し実施例1に係る目標検出装置の構成と同じである。
【0047】
最大値検出及び判定セル範囲指定回路4は、2次元DWT回路3から送られてくるウェーブレット展開係数のうち、あらかじめ設定されているウェーブレット展開係数wh、wvまたはwdのいずれかを用いてCFARの判定セル範囲を指定する。この最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。
【0048】
上記のように構成される実施例2に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0049】
以上説明したように本発明の実施例2に係る目標検出装置によれば、2次元DWTにより分解された信号のうち、目標信号の検出に最も効率のよい信号を用いて目標を検出することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例3】
【0050】
本発明の実施例3に係る目標検出装置は、実施例1に係る目標検出装置において、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのうち、最大値が存在するウェーブレット展開係数を用いるようにしたものである。
【0051】
実施例3に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4が、2次元DWTのウェーブレット展開係数のwh、wvまたはwdのうち、最大値が存在するウェーブレット展開係数を用いて判定セル範囲を指定することを除けば、図1に示し実施例1に係る目標検出装置の構成と同じである。
【0052】
最大値検出及び判定セル範囲指定回路4は、上述したように、2次元DWT回路3から送られてくるウェーブレット展開係数のうち、最大値が存在するウェーブレット展開係数を用いて判定セル範囲を指定する。最大値検出及び判定セル範囲指定回路4で指定された判定セル範囲は、CFAR回路5に送られる。
【0053】
上記のように構成される実施例3に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0054】
以上説明したように本発明の実施例3に係る目標検出装置によれば、2次元DWTにより、垂直方向、水平方向または対角方向の信号に分解し、その最大値を用いるために、信号の時間−周波数軸上における広がりがわからなくても、自動的に最も効率のよい抽出方法を選定することができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例4】
【0055】
本発明の実施例4に係る目標検出装置は、目標信号が隣接セルに跨る可能性がある場合に、2次元DWTのウェーブレット展開係数の最大値を用いて、その周りのN=N1×N2個(N、N1およびN2は正の整数)のセルで、M個(Mは正の整数、M≦N)以上のセルがスレショルドを越えれば、目標である旨を検出するようにしたものである。
【0056】
図8は、実施例4に係る目標検出装置の構成を示すブロック図である。実施例4に係る目標検出装置は、図1に示した目標検出装置の検出回路6がM/N検出回路7に置き換えられて構成されている。
【0057】
図9は、実施例4に係る目標検出装置の動作を説明するための図である。まず、CPI間ビデオ積分回路2は、図9(a)に示すようなPRI−周波数軸上、つまり時間−周波数軸上の合成CPIデータを生成して2次元DWT回路3に送る。2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる信号を、図9(b)に示すような入力データとして2次元離散ウェーブレット変換を行い、図9(c)に示すような信号を最大値検出及び判定セル範囲指定回路4に送る。
【0058】
最大値検出及び判定セル範囲指定回路4は、ウェーブレット展開係数W1v、W1hおよびW1dの中から最大値を求め、図9(d)に示すように、その最大値の周囲のN1×N2個の範囲のセルを表す信号を、CFAR回路5を介してM/N検出回路7に送る。
【0059】
M/N検出回路7は、最大値検出及び判定セル範囲指定回路4からCFAR回路5を介して送られてくるN個のセルを表す信号を所定のスレショルドレベルと比較し、M個以上が所定のスレショルドレベルを超えていれば、目標である旨を検出し、この検出結果を検出値として出力する。
【0060】
上記のように構成される実施例4に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0061】
以上説明したように本発明の実施例4に係る目標検出装置によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出できる確率が高くなる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例5】
【0062】
本発明の実施例5に係る目標検出装置は、複数目標の検出に対応するために、2次元DWTのウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までを抽出し、各極値において、その周りのN=N1×N2個のセルで、M個以上のセルがスレショルドを越えれば、目標である旨を検出するようにしたものである。
【0063】
実施例5に係る目標検出装置の構成は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7の動作を除けば、図8に示し実施例4に係る目標検出装置の構成と同じである。
【0064】
この実施例5に係る目標検出装置の動作を、上述した図9を参照しながら説明する。まず、CPI間ビデオ積分回路2は、図9(a)に示すようなPRI−周波数軸上、つまり時間−周波数軸上の合成CPIデータを生成して2次元DWT回路3に送る。2次元DWT回路3は、CPI間ビデオ積分回路2から送られてくる信号を、図9(b)に示すような入力データとして2次元離散ウェーブレット変換を行い、図9(c)に示すような信号を最大値検出及び判定セル範囲指定回路4に送る。
【0065】
最大値検出及び判定セル範囲指定回路4は、ウェーブレット展開係数W1v、W1hおよびW1dの中から最大値を求め、図9(d)に示すように、複数のウェーブレット展開係数の極値の最大値からL番目までの各極値の周囲のN1×N2(=N)の範囲のセルを表す信号を、CFAR回路5を介してM/N検出回路7に送る。
【0066】
M/N検出回路7は、各極値について、最大値検出及び判定セル範囲指定回路4からCFAR回路5を介して送られてくるN個のセルを表す信号を所定のスレショルドレベルと比較し、M個以上が所定のスレショルドレベルを超えていれば、目標である旨を検出し、この検出結果を検出値として出力する。
【0067】
上記のように構成される実施例5に係る目標検出装置の動作は、最大値検出及び判定セル範囲指定回路4およびM/N検出回路7が上述した動作を行うことを除けば、図7のフローチャートを参照して説明した実施例1に係る目標検出装置の動作と同じである。
【0068】
以上説明したように本発明の実施例5に係る目標検出装置によれば、2次元DWTのウェーブレット展開係数の軸上で、目標信号が隣接セルに跨る可能性が高いことを利用して、所望の目標以外の誤警報が生じた場合であっても、誤警報を低減して、目標のみを検出でき、かつ、複数の極値を用いるので、複数の目標を検出する確率をあげることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例6】
【0069】
本発明の実施例6に係る目標検出装置は、実施例1に係る目標検出装置のような複数CPIの最大値抽出または加算データではなく、目標位置(レンジ−クロスレンジ軸またはレンジ−角度軸)を示す複数フレーム間の最大値抽出または加算したデータに対して、2次元DWTにより目標信号を加算して、目標を検出するようにしたものである。
【0070】
図10は、本発明の実施例6に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、実施例1に係る目標検出装置のCPI間ビデオ積分回路2がフレーム間ビデオ積分回路8に置き換えられて構成されている。
【0071】
CPI毎FFT回路1は、入力データをCPI毎に高速フーリエ変換(FFT)する。これにより、図11(a)に示すようなレンジ−角度軸上の目標位置を表すデータが得られる。CPI毎FFT回路1で得られた目標位置を表すデータは、フレーム間ビデオ積分回路8に送られる。
【0072】
フレーム間ビデオ積分回路8は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存し、この保存したCPI毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図11(b)に示すような合成CPIデータを生成する。フレーム間ビデオ積分回路8で生成された合成CPIデータは、2次元DWT回路3に送られる。
【0073】
次に、上記のように構成される本発明の実施例6に係る目標検出装置の動作を、図12に示すフローチャートを参照しながら説明する。
【0074】
まず、送受信が行われる(ステップS21)。次いで、高速フーリエ変換(FFT)が行われる(ステップS12)。すなわち、CPI毎FFT回路1は、ステップS11における送受信により得られた1つのCPIにおける入力データを高速フーリエ変換し、レンジ−角度軸上の目標位置を表すデータを生成してフレーム間ビデオ積分回路8に送る。フレーム間ビデオ積分回路8は、CPI毎FFT回路1から送られてくる目標位置を表すデータを順次に保存する。
【0075】
次いで、捜索範囲が終了したかどうかが調べられる(ステップS23)。ステップS23において、捜索範囲が終了していないことが判断されると、次いで、ビームポジションの変更が行われる(ステップS24)。すなわち、次のビームポジションに対する処理が行われるように捜索範囲が変更される。その後、ステップS21に戻り、上述した処理が繰り返される。
【0076】
ステップS23において、捜索範囲が終了したことが判断されると、次いで、フレーム数が終了したかどうかが調べられる(ステップS25)。ステップS25において、フレーム数が終了していないことが判断されると、次いで、フレーム番号の変更が行われる(ステップS26)。すなわち、次のフレームに対する処理が行われるようにフレーム番号が変更される。その後、ステップS21に戻り、上述した処理が繰り返される。
【0077】
ステップS25において、フレーム数が終了したことが判断されると、次いで、フレーム間積分が行われる(ステップS27)。すなわち、フレーム間ビデオ積分回路8は、CPI毎FFT回路1から受け取って保存されているフレーム毎の目標位置を表すデータの最大値抽出または加算演算を実施し、図11(b)に示すような合成CPIデータを生成して2次元DWT回路3に送る。
【0078】
次いで、2次元DWTが行われる(ステップS28)。すなわち、2次元DWT回路3は、フレーム間ビデオ積分回路8から送られてくる合成CPIデータに対して2次元DWTを実施することによって得られたウェーブレット展開係数を最大値検出及び判定セル範囲指定回路4に送る。
【0079】
次いで、最大値検出及び判定セル範囲指定が行われる(ステップS29)。すなわち、最大値検出及び判定セル範囲指定回路4は、図11(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表すデータをCFAR回路5に送る。
【0080】
次いで、CFAR処理および検出処理が行われる(ステップS18)。すなわち、CFAR回路5は、最大値検出及び判定セル範囲指定回路4から送られてくるデータによって示される判定セル範囲で、CFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、検出した結果を検出値として出力する。
【0081】
以上説明したように本発明の実施例6に係る目標検出装置によれば、フレーム間を加算したデータを用いて、2次元DWTにより目標信号を加算し、目標を検出するように構成したので、目標を検出できる確率を向上させることができる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【実施例7】
【0082】
上述した実施例1〜実施例6に係る目標検出装置は、2次元DWTをそのまま用いて目標を検出するように構成したが、本発明の実施例7に係る目標検出装置は、2次元DWTの結果により目標範囲を抽出し、その抽出され範囲内で再度、信号の送受信を行い、効率的に積分して、目標をより高い確度で検出するようにしたものである。
【0083】
図13は、本発明の実施例7に係る目標検出装置の構成を示すブロック図である。この目標検出装置は、実施例6に係る目標検出装置の最大値検出及び判定セル範囲指定回路4とCFAR回路5との間に、目標範囲抽出回路9、レーダ制御装置10およびFFT回路11が追加されて構成されている。
【0084】
目標範囲抽出回路9は、最大値検出及び判定セル範囲指定回路4から出力される信号に基づき目標範囲を抽出する。この目標範囲抽出回路9で抽出された目標範囲を表す信号は、レーダ制御装置10に送られる。
【0085】
レーダ制御装置10は、目標範囲抽出回路9から送られてくる信号によって示される目標範囲に向けて信号の送受信を行う。このレーダ制御装置10による送受信によって目標範囲の目標から送られてくる受信信号は、入力データ2としてFFT回路11に入力される。FFT回路11は、入力データ2を高速フーリエ変換し、CFAR回路5に送る。
【0086】
次に、上記のように構成される本発明の実施例1に係る目標検出装置の動作を、図14に示すフローチャートを参照しながら説明する。なお、図12に示した実施例6に係る目標検出装置の動作を示すフローチャートと同一の処理を行うステップには、図12で使用した符号と同一の符号を付して説明を省略する。
【0087】
まず、ステップS21〜ステップS28の処理は、図12に示した実施例6に係る目標検出装置の動作を示すフローチャートに示した処理と同じである。ステップS29では、最大値検出及び判定セル範囲指定が行われる。すなわち、最大値検出及び判定セル範囲指定回路4は、図11(b)に示した信号に対してウェーブレット展開係数の最大値を抽出してCFARの判定セル範囲を指定し、指定した判定セル範囲を表す信号を目標範囲抽出回路9に送る。
【0088】
次いで、目標範囲抽出が行われる(ステップS31)。すなわち、目標範囲抽出回路9は、最大値検出及び判定セル範囲指定回路4から送られてくる信号に基づき目標範囲を抽出し、その旨を表す信号をレーダ制御装置10に送る。
【0089】
次いで、送受信が行われる(ステップS32)。すなわち、レーダ制御装置10は、目標範囲抽出回路9から送られてくる信号によって示される目標範囲に向けて信号を送受信する。このレーダ制御装置10による送受信により、目標範囲の目標で反射された受信信号は、入力データ2としてFFT回路11に入力される。
【0090】
次いで、高速フーリエ変換(FFT)が行われる(ステップS33)。すなわち、FFT回路11は、入力データ2をフーリエ変換し、その結果をCFAR回路5に送る。
【0091】
次いで、CFAR処理および検出処理が行われる(ステップS34)。すなわち、CFAR回路5は、FFT回路11から送られてくる信号にCFAR処理を実施し、その結果を検出回路6に送る。検出回路6は、CFAR回路5から送られてくる誤警報確率が一定の低さに抑えられた信号を所定のスレショルドレベルと比較し、その比較結果に基づいて目標を検出し、この検出した結果を検出値として出力する。
【0092】
以上説明したように本発明の実施例7に係る目標検出装置によれば、目標範囲を抽出して、限定した範囲で多パルス積分することにより、SN比を向上させることができるので、効率よく目標を検出できる。その結果、高速目標が小目標であっても目標検出性能を向上させることができる。
【0093】
なお、上述した実施例1〜実施例6に係る目標検出装置においては、2次元DWTのウェーブレット展開係数は、入力信号を1回だけウェーブレット変換するように構成したが、複数回展開するように構成することもできる。
【産業上の利用可能性】
【0094】
本発明は、高速で移動する小目標を検出して追尾するレーダ装置または受信装置などに利用可能である。
【図面の簡単な説明】
【0095】
【図1】本発明の実施例1に係る目標検出装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る目標検出装置において行われるCPI間ビデオ積分を説明するための図である。
【図3】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図4】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換のウェーブレット展開係数を示す図である。
【図5】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換の時間−周波数フィルタを示す図である。
【図6】本発明の実施例1に係る目標検出装置において行われるウェーブレット変換の入出力信号を説明するための図である。
【図7】本発明の実施例1に係る目標検出装置の動作を説明するためのフローチャートである。
【図8】本発明の実施例4に係る目標検出装置の構成を示すブロック図である。
【図9】本発明の実施例4に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図10】本発明の実施例6に係る目標検出装置の構成を示すブロック図である。
【図11】本発明の実施例6に係る目標検出装置において行われるウェーブレット変換を説明するための図である。
【図12】本発明の実施例6に係る目標検出装置の動作を説明するためのフローチャートである。
【図13】本発明の実施例7に係る目標検出装置の構成を示すブロック図である。
【図14】本発明の実施例7に係る目標検出装置の動作を説明するためのフローチャートである。
【図15】従来の目標検出装置の構成を示すブロック図である。
【図16】従来の目標検出装置で使用されるCFAR回路の詳細を示すブロック図である。
【図17】従来の目標検出装置において送受信される複数のPRIの各々において、受信信号に現れる目標の様子を示す図である。
【符号の説明】
【0096】
1 CPI毎FFT回路
2 CPI間ビデオ積分回路
3 2次元DWT回路
4 最大値及び判定セル範囲指定回路
5 CFAR回路
6 検出回路
7 M/N検出回路
8 フレーム間ビデオ積分回路
9 目標範囲抽出回路
10 レーダ制御装置
11 FFT回路
【特許請求の範囲】
【請求項1】
入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、
前記CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路と、
前記CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、
前記2次元DWT回路の出力に基づき目標を検出することを特徴とする目標検出装置。
【請求項2】
前記2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdのいずれか1つを用いて目標を検出することを特徴とする請求項1記載の目標検出装置。
【請求項3】
前記2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdの最大値を用いて目標を検出することを特徴とする請求項1記載の目標検出装置。
【請求項4】
前記2次元DWT回路から出力されるウェーブレット展開係数の最大値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする請求項1乃至請求項3のいずれか1項記載の目標検出装置。
【請求項5】
前記2次元DWT回路から出力されるウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までの各々について、該極値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする請求項1乃至請求項3のいずれか1項記載の目標検出装置。
【請求項6】
入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、
前記CPI毎FFT回路によるフーリエ変換により得られたCPI毎のレンジ−クロスレンジ軸またはレンジ−角度軸上の目標位置を示すフレームを生成し、該フレーム間の最大値または加算した信号を生成するフレーム間ビデオ積分回路と、
前記フレーム間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、
2次元DWT回路の出力に所定の処理を施すことにより目標を検出することを特徴とする目標検出装置。
【請求項7】
前記2次元DWT回路の出力に基づき目標が存在する目標範囲を抽出する目標範囲抽出回路と、
前記目標範囲抽出回路で抽出された目標範囲に対する送受信に得られた入力データを高速フーリエ変換するFFT回路とを備え、
前記FFT回路に出力に所定の処理を施すことにより目標を検出することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標検出装置。
【請求項1】
入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、
前記CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路と、
前記CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、
前記2次元DWT回路の出力に基づき目標を検出することを特徴とする目標検出装置。
【請求項2】
前記2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdのいずれか1つを用いて目標を検出することを特徴とする請求項1記載の目標検出装置。
【請求項3】
前記2次元DWT回路から出力されるウェーブレット展開係数wh、wvまたはwdの最大値を用いて目標を検出することを特徴とする請求項1記載の目標検出装置。
【請求項4】
前記2次元DWT回路から出力されるウェーブレット展開係数の最大値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする請求項1乃至請求項3のいずれか1項記載の目標検出装置。
【請求項5】
前記2次元DWT回路から出力されるウェーブレット展開係数の極値の最大値からL番目(Lは正の整数)までの各々について、該極値の周りのN個(Nは正の整数)のセルのうち、M個(Mは正の整数、M≦N)以上のセルが所定のスレショルドを越えた場合に目標である旨を検出するM/N検出回路を備えたことを特徴とする請求項1乃至請求項3のいずれか1項記載の目標検出装置。
【請求項6】
入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路と、
前記CPI毎FFT回路によるフーリエ変換により得られたCPI毎のレンジ−クロスレンジ軸またはレンジ−角度軸上の目標位置を示すフレームを生成し、該フレーム間の最大値または加算した信号を生成するフレーム間ビデオ積分回路と、
前記フレーム間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路とを備え、
2次元DWT回路の出力に所定の処理を施すことにより目標を検出することを特徴とする目標検出装置。
【請求項7】
前記2次元DWT回路の出力に基づき目標が存在する目標範囲を抽出する目標範囲抽出回路と、
前記目標範囲抽出回路で抽出された目標範囲に対する送受信に得られた入力データを高速フーリエ変換するFFT回路とを備え、
前記FFT回路に出力に所定の処理を施すことにより目標を検出することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2009−264900(P2009−264900A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−114109(P2008−114109)
【出願日】平成20年4月24日(2008.4.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月24日(2008.4.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]