
目標検出装置
【課題】近接信管を搭載する飛しょう体において、地上の目標との相対距離差を利用して目標検出を行う場合、目標付近に樹木等の目標以外の物体があると、樹木等を目標と誤検出するという課題がある。
【解決手段】 目標に向けレーザ光を送信する送信部と、レーザ光が前記目標で反射された反射波を受信する受信部と、前記反射波に基づき目標を抽出する信号処理部とを備え、信号処理部は、同じ飛しょう体が搭載するシーカが取得した前記目標に係る目標情報(主に測角情報)に基づき目標方向を限定していくことで目標以外の物体への誤検出を防止する。
【解決手段】 目標に向けレーザ光を送信する送信部と、レーザ光が前記目標で反射された反射波を受信する受信部と、前記反射波に基づき目標を抽出する信号処理部とを備え、信号処理部は、同じ飛しょう体が搭載するシーカが取得した前記目標に係る目標情報(主に測角情報)に基づき目標方向を限定していくことで目標以外の物体への誤検出を防止する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、飛しょう体に搭載される目標検出装置に関するものである。
【背景技術】
【0002】
近接信管は多くの飛しょう体に搭載されているものであり、飛しょう体が目標感知のために搭載する構成品の1つである。
従来、近接信管としては、衝撃を検出して作動するものや、目標から発生する熱などの出力を検出し作動するもの、自ら出力した電波やレーザ等の電磁波が目標から反射された反射波を検出し作動するもの等が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−221799号公報(第1図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の近接信管では、目標が空中を飛しょうする飛しょう体であり、目標周囲が空間であって見誤るような物体がない場合は目標を正しく感知することができるが、目標が地上にあって、地上の目標周辺に構造物などの物体が多数ある場合には、その目標以外の物を目標として感知する可能性があった。
また、電波を使用した近接信管では目標反射波の電力強度によりその目標との相対距離を検出することがあるが、その物体の反射率によっては目標との相対距離を誤認識してしまうため、目標との正確な相対位置を検出することが困難であるという課題があった。
【0005】
この発明は係る課題を解決するためになされたものであり、目標の検出精度を向上した目標検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る目標検出装置は、飛しょう体に搭載され、地上の目標を検出する目標検出装置であって、前記目標に向け送信波を送信する送信部と、前記送信波が前記目標で反射された反射波を受信する受信部と、前記反射波に基き目標を抽出する信号処理部とを備え、前記信号処理部は、前記飛しょう体が搭載するシーカが取得した前記目標に係る目標情報に基づき目標検出方向を限定して前記目標を抽出する。
【発明の効果】
【0007】
この発明の目標検出装置によれば、目標と、目標周辺にある物体との弁別が可能となり、目標の検出精度を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1に係る目標検出装置(近接信管)の構成ブロック図を示す。
【図2】実施の形態1に係る目標検出装置を搭載した誘導飛しょう体の目標検出処理フローである。
【図3】実施の形態1に係る目標検出装置を搭載した誘導飛しょう体の運用図を示す。
【図4】実施の形態1に係る目標検出装置が実施する間引き処理の具体例を示す図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、実施の形態1に係る目標検出装置について説明する。
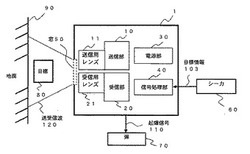
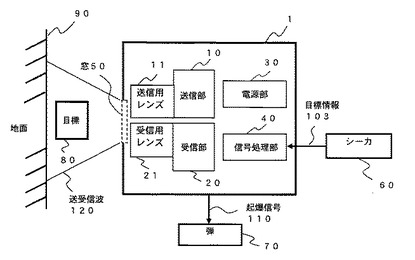
図1は、実施の形態1に係る近接信管1の構成ブロック図である。近接信管は目標検出装置の一例である。
近接信管1は、レーザ光の出力機能を有する送信部10と、そのレーザ光を窓50を通して外部へ出力するための送信用レンズ11と、出力されたレーザ光が目標80又は地上90の目標以外の物体にあたり反射したレーザ光を受信する受信用レンズ21と、そのレンズ21を通して入力されるレーザ光を受信処理する受信部20と、送信部10にて出力したレーザ光と受信部にて受信したレーザ光を処理してその入出力の時間差や強度差から目標との相対距離や目標形状、他の目標検出装置からの入力情報と組み合わせて算出処理を行うことができる信号処理部40と、送信部と受信部と信号処理部に対し所要の電源を供給する電源部30からなる。
信号処理部40は、近接信管1と同じ飛しょう体200に搭載されるシーカ60と接続され、シーカ60が取得した目標に係る目標情報103を入力する。
【0010】
次に図2〜図4を参照しながら、本実施の形態に係る目標検出装置の動作について説明する。
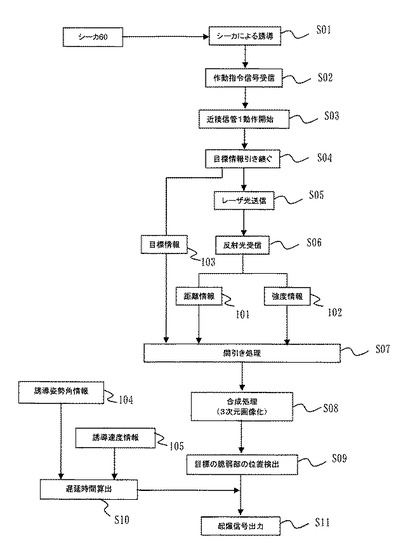
図2は本実施の形態に係る近接信管1(目標検出装置)を搭載した誘導飛しょう体の目標検出処理フローである。
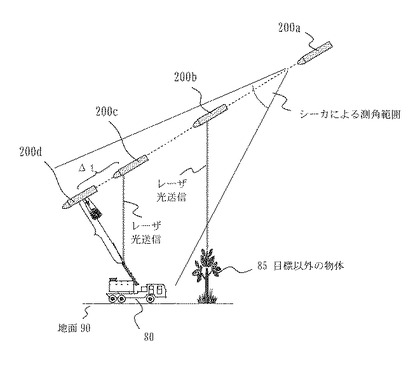
図3は本実施の形態に係る近接信管1を搭載した飛しょう体の目標への会合を説明する図である。なお、図3の飛しょう体200a、200b、200c、200dはそれぞれ同一の飛しょう体200であり、飛しょうする飛しょう体200の位置を時系列で示したものである。
図4は本実施の形態に係る近接信管1の信号処理部40が実行する間引き処理の画像処理の一例である。
【0011】
図3において、飛しょう体200aは飛しょう体の先端に搭載するシーカ60(他の目標検出装置)により目標の探知、追尾処理を行う。飛しょう体200aは、シーカ60が取得する目標に係る目標情報103(角度、速度、距離、周波数等)により目標80の近傍に向け誘導される(図2のステップS01)。
【0012】
次に、飛しょう体200aは、目標との会合直前に作動指令信号を受けて(図2、S02)、近接信管1を作動させる(図2、S03)。
このとき、近接信管1の信号処理部40は、シーカ60で処理していた目標情報103(角度、速度、距離、周波数など)をシーカ60から入力して、目標情報103を引き継ぐ(図2、S04)。
【0013】
作動指令信号を受けた飛しょう体200bの位置の近接信管1は、自らレーザ光を照射する(図2、S05)。
このとき、受信部20は、地上の目標と目標以外の物体からの反射波を受信する(図2、S06)。
信号処理部40は、受信した反射波に基づきレーザを反射する物体までの距離情報101と強度情報102を取得する。
【0014】
次に、信号処理部40は、反射波から取得した距離情報101と強度情報102と、先にシーカ60から引き継いだ目標情報103とを比較処理することにより、その物体が目標80であるか、または目標以外の物体85であるかを分離する。
すなわち、信管処理部40はシーカ60が取得した目標情報(角度、速度、距離、周波数等)を引き継いでおり、現在位置からみた目標80の相対位置等を把握している。信管処理部40はシーカ60が取得した目標情報103を正として、近接信管1が得た距離情報101と強度情報102の妥当性を判断する。
仮に、シーカ60が取得した目標情報103により推測される目標までの距離と反射強度が、近接信管1の取得した距離情報101と強度情報102と異なる場合には、近接信管1の取得した距離情報101と強度情報102は、目標以外の物体85からの反射光であると判断して、その情報を棄却する(図2、S07)。
このように情報に対してシーカ60からの測角情報などを取り込むことにより、目標検出方向を限定して処理することで目標以外の物体85からの情報を棄却する。
【0015】
信号処理部40は間引き処理S07を繰り返すことにより、目標以外からの情報を棄却していくことで、目標80の情報を抽出する。
【0016】
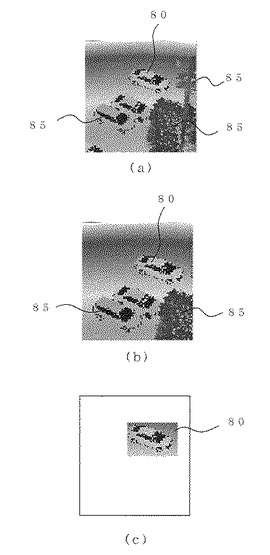
図4は、間引き処理の具体例を示す図である。
信号処理部40は、間引き処理(S07)を繰り返すことにより、目標以外の物体85である樹木や車両を除去していき(図4(b))、目標80である車両を抽出する(図4(c))。
【0017】
次に、信管処理部40は目標80の距離情報101と強度情報102により、目標の3次元画像を作成する(図2、S08)。距離情報101と強度情報102を合成し画像化させ目標の形状を認識すると共に、検出した距離情報と合わせて目標と目標以外の物体を弁別し、誤検出を防止することができる。
【0018】
次に、信管処理部40は目標80の脆弱部の位置検出を行う。
信管処理部40は、先に説明したように目標までの距離情報だけでなく強度情報を使用するが、これらの情報に対してシーカ部などの他の目標検出装置から測角情報などを取り込むことにより、目標検出方向を限定して目標を抽出する。そして、抽出された目標とデータベース(図示せず)と比較することで、目標80の脆弱部を推定し、この脆弱部を目標に設定する。
【0019】
なお、目標方向の絞込みは、ハードウェアやソフトウェアによる信号処理でもよいが、送受信用レンズに対し、別にフィルター用のレンズを準備し、そのレンズの挿入状態を変化させるなど物理的に視野範囲を制御することで実現してもよい。
【0020】
また、レーザ反射波を画像化させた後、その情報から目標を検出する方法として受信部又は信号処理部内のメモリに目標の一般形状データを保持させて置き、そのデータとの照合を行うことで、よりいっそう目標検出精度を高めることもできる。
【0021】
なお、目標の脆弱部の位置検出については、レーザ光の送受信によりレーザ反射物との距離を計測し、この距離の変化率の大小を予め設定した基準値と比較することで目標の脆弱部を検出するようにしてもよい。
【0022】
次に、信号処理部40は、飛しょう体と目標との相対速度や飛しょう体の姿勢角などを用いて最適な時期に目標に向かう弾に対し起爆信号を出力する(図2、S11)。
この際、誘導する弾の速度や姿勢角を基に算出された遅延時間を考慮し、起爆信号を弾へ送出する。
【0023】
このように本実施の形態の近接信管(目標検出装置)によれば、シーカが取得した目標情報を用いることにより、目標付近に樹木等の他の目標以外の物体がある場合であっても近接信管はこれを目標以外の物体であると検知して、目標の検出精度を向上させることができる。これにより、目標をより正確に把握することができる。
【符号の説明】
【0024】
1 近接信管、10 送信部、20 受信部、11 送信用レンズ、21 受信用レンズ、30 電源部、40 信号処理部、50 窓、60 シーカ、70 弾、80 目標、85 目標以外の物体、90 地面、101 距離情報、102 強度情報、103 目標情報、104 誘導姿勢角情報、105 誘導速度情報、110 起爆信号、120送受信波、200 飛しょう体。
【技術分野】
【0001】
この発明は、飛しょう体に搭載される目標検出装置に関するものである。
【背景技術】
【0002】
近接信管は多くの飛しょう体に搭載されているものであり、飛しょう体が目標感知のために搭載する構成品の1つである。
従来、近接信管としては、衝撃を検出して作動するものや、目標から発生する熱などの出力を検出し作動するもの、自ら出力した電波やレーザ等の電磁波が目標から反射された反射波を検出し作動するもの等が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−221799号公報(第1図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の近接信管では、目標が空中を飛しょうする飛しょう体であり、目標周囲が空間であって見誤るような物体がない場合は目標を正しく感知することができるが、目標が地上にあって、地上の目標周辺に構造物などの物体が多数ある場合には、その目標以外の物を目標として感知する可能性があった。
また、電波を使用した近接信管では目標反射波の電力強度によりその目標との相対距離を検出することがあるが、その物体の反射率によっては目標との相対距離を誤認識してしまうため、目標との正確な相対位置を検出することが困難であるという課題があった。
【0005】
この発明は係る課題を解決するためになされたものであり、目標の検出精度を向上した目標検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る目標検出装置は、飛しょう体に搭載され、地上の目標を検出する目標検出装置であって、前記目標に向け送信波を送信する送信部と、前記送信波が前記目標で反射された反射波を受信する受信部と、前記反射波に基き目標を抽出する信号処理部とを備え、前記信号処理部は、前記飛しょう体が搭載するシーカが取得した前記目標に係る目標情報に基づき目標検出方向を限定して前記目標を抽出する。
【発明の効果】
【0007】
この発明の目標検出装置によれば、目標と、目標周辺にある物体との弁別が可能となり、目標の検出精度を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1に係る目標検出装置(近接信管)の構成ブロック図を示す。
【図2】実施の形態1に係る目標検出装置を搭載した誘導飛しょう体の目標検出処理フローである。
【図3】実施の形態1に係る目標検出装置を搭載した誘導飛しょう体の運用図を示す。
【図4】実施の形態1に係る目標検出装置が実施する間引き処理の具体例を示す図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、実施の形態1に係る目標検出装置について説明する。
図1は、実施の形態1に係る近接信管1の構成ブロック図である。近接信管は目標検出装置の一例である。
近接信管1は、レーザ光の出力機能を有する送信部10と、そのレーザ光を窓50を通して外部へ出力するための送信用レンズ11と、出力されたレーザ光が目標80又は地上90の目標以外の物体にあたり反射したレーザ光を受信する受信用レンズ21と、そのレンズ21を通して入力されるレーザ光を受信処理する受信部20と、送信部10にて出力したレーザ光と受信部にて受信したレーザ光を処理してその入出力の時間差や強度差から目標との相対距離や目標形状、他の目標検出装置からの入力情報と組み合わせて算出処理を行うことができる信号処理部40と、送信部と受信部と信号処理部に対し所要の電源を供給する電源部30からなる。
信号処理部40は、近接信管1と同じ飛しょう体200に搭載されるシーカ60と接続され、シーカ60が取得した目標に係る目標情報103を入力する。
【0010】
次に図2〜図4を参照しながら、本実施の形態に係る目標検出装置の動作について説明する。
図2は本実施の形態に係る近接信管1(目標検出装置)を搭載した誘導飛しょう体の目標検出処理フローである。
図3は本実施の形態に係る近接信管1を搭載した飛しょう体の目標への会合を説明する図である。なお、図3の飛しょう体200a、200b、200c、200dはそれぞれ同一の飛しょう体200であり、飛しょうする飛しょう体200の位置を時系列で示したものである。
図4は本実施の形態に係る近接信管1の信号処理部40が実行する間引き処理の画像処理の一例である。
【0011】
図3において、飛しょう体200aは飛しょう体の先端に搭載するシーカ60(他の目標検出装置)により目標の探知、追尾処理を行う。飛しょう体200aは、シーカ60が取得する目標に係る目標情報103(角度、速度、距離、周波数等)により目標80の近傍に向け誘導される(図2のステップS01)。
【0012】
次に、飛しょう体200aは、目標との会合直前に作動指令信号を受けて(図2、S02)、近接信管1を作動させる(図2、S03)。
このとき、近接信管1の信号処理部40は、シーカ60で処理していた目標情報103(角度、速度、距離、周波数など)をシーカ60から入力して、目標情報103を引き継ぐ(図2、S04)。
【0013】
作動指令信号を受けた飛しょう体200bの位置の近接信管1は、自らレーザ光を照射する(図2、S05)。
このとき、受信部20は、地上の目標と目標以外の物体からの反射波を受信する(図2、S06)。
信号処理部40は、受信した反射波に基づきレーザを反射する物体までの距離情報101と強度情報102を取得する。
【0014】
次に、信号処理部40は、反射波から取得した距離情報101と強度情報102と、先にシーカ60から引き継いだ目標情報103とを比較処理することにより、その物体が目標80であるか、または目標以外の物体85であるかを分離する。
すなわち、信管処理部40はシーカ60が取得した目標情報(角度、速度、距離、周波数等)を引き継いでおり、現在位置からみた目標80の相対位置等を把握している。信管処理部40はシーカ60が取得した目標情報103を正として、近接信管1が得た距離情報101と強度情報102の妥当性を判断する。
仮に、シーカ60が取得した目標情報103により推測される目標までの距離と反射強度が、近接信管1の取得した距離情報101と強度情報102と異なる場合には、近接信管1の取得した距離情報101と強度情報102は、目標以外の物体85からの反射光であると判断して、その情報を棄却する(図2、S07)。
このように情報に対してシーカ60からの測角情報などを取り込むことにより、目標検出方向を限定して処理することで目標以外の物体85からの情報を棄却する。
【0015】
信号処理部40は間引き処理S07を繰り返すことにより、目標以外からの情報を棄却していくことで、目標80の情報を抽出する。
【0016】
図4は、間引き処理の具体例を示す図である。
信号処理部40は、間引き処理(S07)を繰り返すことにより、目標以外の物体85である樹木や車両を除去していき(図4(b))、目標80である車両を抽出する(図4(c))。
【0017】
次に、信管処理部40は目標80の距離情報101と強度情報102により、目標の3次元画像を作成する(図2、S08)。距離情報101と強度情報102を合成し画像化させ目標の形状を認識すると共に、検出した距離情報と合わせて目標と目標以外の物体を弁別し、誤検出を防止することができる。
【0018】
次に、信管処理部40は目標80の脆弱部の位置検出を行う。
信管処理部40は、先に説明したように目標までの距離情報だけでなく強度情報を使用するが、これらの情報に対してシーカ部などの他の目標検出装置から測角情報などを取り込むことにより、目標検出方向を限定して目標を抽出する。そして、抽出された目標とデータベース(図示せず)と比較することで、目標80の脆弱部を推定し、この脆弱部を目標に設定する。
【0019】
なお、目標方向の絞込みは、ハードウェアやソフトウェアによる信号処理でもよいが、送受信用レンズに対し、別にフィルター用のレンズを準備し、そのレンズの挿入状態を変化させるなど物理的に視野範囲を制御することで実現してもよい。
【0020】
また、レーザ反射波を画像化させた後、その情報から目標を検出する方法として受信部又は信号処理部内のメモリに目標の一般形状データを保持させて置き、そのデータとの照合を行うことで、よりいっそう目標検出精度を高めることもできる。
【0021】
なお、目標の脆弱部の位置検出については、レーザ光の送受信によりレーザ反射物との距離を計測し、この距離の変化率の大小を予め設定した基準値と比較することで目標の脆弱部を検出するようにしてもよい。
【0022】
次に、信号処理部40は、飛しょう体と目標との相対速度や飛しょう体の姿勢角などを用いて最適な時期に目標に向かう弾に対し起爆信号を出力する(図2、S11)。
この際、誘導する弾の速度や姿勢角を基に算出された遅延時間を考慮し、起爆信号を弾へ送出する。
【0023】
このように本実施の形態の近接信管(目標検出装置)によれば、シーカが取得した目標情報を用いることにより、目標付近に樹木等の他の目標以外の物体がある場合であっても近接信管はこれを目標以外の物体であると検知して、目標の検出精度を向上させることができる。これにより、目標をより正確に把握することができる。
【符号の説明】
【0024】
1 近接信管、10 送信部、20 受信部、11 送信用レンズ、21 受信用レンズ、30 電源部、40 信号処理部、50 窓、60 シーカ、70 弾、80 目標、85 目標以外の物体、90 地面、101 距離情報、102 強度情報、103 目標情報、104 誘導姿勢角情報、105 誘導速度情報、110 起爆信号、120送受信波、200 飛しょう体。
【特許請求の範囲】
【請求項1】
飛しょう体に搭載され、地上の目標を検出する目標検出装置であって、
前記目標に向け送信波を送信する送信部と、
前記送信波が前記目標で反射された反射波を受信する受信部と、
前記反射波に基き目標を抽出する信号処理部と、
を備え、
前記信号処理部は、前記飛しょう体が搭載するシーカが取得した前記目標に係る目標情報に基づき目標検出方向を限定して前記目標を抽出することを特徴とする目標検出装置。
【請求項2】
前記目標検出装置は、
レーザ光を送信するレーザ送信部と、反射光を受信するレーザ受信部とを備え、
前記信号処理部は、前記反射光に基づき取得した反射光の強度情報と、前記目標までの距離情報と、前記シーカが取得した前記目標までの角度、速度、距離の目標情報とに基づき、前記目標を抽出する近接信管であることを特徴とする請求項1記載の目標検出装置。
【請求項1】
飛しょう体に搭載され、地上の目標を検出する目標検出装置であって、
前記目標に向け送信波を送信する送信部と、
前記送信波が前記目標で反射された反射波を受信する受信部と、
前記反射波に基き目標を抽出する信号処理部と、
を備え、
前記信号処理部は、前記飛しょう体が搭載するシーカが取得した前記目標に係る目標情報に基づき目標検出方向を限定して前記目標を抽出することを特徴とする目標検出装置。
【請求項2】
前記目標検出装置は、
レーザ光を送信するレーザ送信部と、反射光を受信するレーザ受信部とを備え、
前記信号処理部は、前記反射光に基づき取得した反射光の強度情報と、前記目標までの距離情報と、前記シーカが取得した前記目標までの角度、速度、距離の目標情報とに基づき、前記目標を抽出する近接信管であることを特徴とする請求項1記載の目標検出装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−194081(P2012−194081A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−58698(P2011−58698)
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]