
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種センサが探知した目標物の情報を管理する目標物管理装置および目標物管理方法に関する。
【背景技術】
【0002】
従来、センサを用いて目標物を探知して、探知した目標物ごとの情報を取得して、目標物を管理する装置が知られている。目標物の情報の管理は、前回探知した目標物の位置、速度、種別(車両、人など)の情報と、今回探知した目標物の位置、速度、種別の情報との類似性を判定して、前回探知した目標物と今回探知した目標物との関連付けをして管理をしている。複数のセンサを用いる場合、各センサが探知した目標物それぞれの位置、速度、種別の類似性を比較し、その結果を用いて目標物に対応する情報を管理している。
【0003】
また、複数のセンサを用いて監視対象の領域内の目標物を管理する場合、各センサが探知した目標物それぞれの位置、速度、種別の類似性を判定して、比較した結果を用いて目標物に対応する情報を管理している。
【0004】
関連する技術として、災害現場からの観測データに基づいて模擬規則を決定し、被災範囲予測を行う災害監視装置が開示されている。その災害監視装置によれば、災害現場から観測データを取得し、観測データを基に災害状況を簡略化して表す現状データを生成し、現状データに基づいて推定規則を生成する。また、現状データに基づき、生成された推定規則を用いて被災範囲予測を行うものである。
【0005】
また、関連する技術として、侵入者が現在どこまで侵入しているか予測し、表示することにより、侵入者捕捉に役立てるようにした侵入監視システムが開示されている。この侵入監視システムによれば、監視区域内のそれぞれの所定の位置に設けられた複数の侵入検知センサと、侵入検知センサからの検知信号に基づき侵入発生時からの経過時間に応じて侵入可能な範囲を予測する。そして、この予測に応じて侵入可能な範囲を表示するものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−295633号公報
【特許文献2】特開2004−171279号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の態様のひとつである目標物管理装置は、メッシュ管理部、目標推定部、同一化部、反映部を有している。
メッシュ管理部は、監視対象範囲を一定の区域からなるメッシュに区切り、管理する。
【0009】
目標推定部は、探知した目標物の情報を有する探知情報を用いて、上記目標物の存在するメッシュを決定し、時間経過に応じて上記目標物の存在する目標存在メッシュを推定する。
【0010】
同一化判定部は、上記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、上記目標存在メッシュを更新する。
反映部は、目標物がない地域を示す否定情報を受信すると、上記地域に対応する目標物がないメッシュを上記目標存在メッシュに反映し、反映した目標存在メッシュを更新する。
【発明の効果】
【0011】
本実施の形態によれば、目標物が存在する可能性のある区域を精度よく推定できるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】目標物管理装置の一実施例を示す図である。
【図2】目標物管理装置が監視する監視対象範囲の一実施例を示す図である。
【図3】目標物管理装置の制御部の一実施例を示す図である。
【図4】センサの一実施例を示す図である。
【図5】センサの制御部の動作の一実施例を示すフロー図である。
【図6】センサ情報と探知情報のデータ構造の一実施例を示す図である。
【図7】否定情報のデータ構造の一実施例を示す図である。
【図8】メッシュ管理部の動作の一実施例を示すフロー図である。
【図9】メッシュ情報のデータ構造とメッシュの一実施例を示すフロー図である。
【図10】移動時間係数情報と係数補正情報のデータ構造の一実施例を示す図である。
【図11】速度情報のデータ構造の一実施例を示す図である。
【図12】目標推定部の動作の一実施例を示すフロー図である。
【図13】目標存在情報のデータ構造の一実施例を示す図である。
【図14】更新周期の求め方の一実施例を示すフロー図である。
【図15】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図16】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図17】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図18】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図19】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図20】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図21】同一化部の動作の一実施例を示すフロー図である。
【図22】同一化部の同一化処理の動作の一実施例を示すフロー図である。
【図23】2つの目標物各々に対応する目標存在情報に記憶されている目標存在メッシュを示す図である。
【図24】反映部の動作の一実施例を示すフロー図である。
【図25】反映部の動作の一実施例を示すフロー図である。
【図26】更新周期の回数と更新日時と否定情報を受信した時間の関係を示す図である。
【図27】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図28】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図29】反映部の動作の一実施例を示すフロー図である。
【図30】更新周期の回数と更新日時と否定情報を受信した時間の関係を示す図である。
【図31】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図32】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【発明を実施するための形態】
【0013】
本実施形態では、センサによる探知情報や人の観測による情報を蓄積して目標物を継続的に管理する場合に、目標物がないことを示す否定情報を現在管理されている目標物の情報に反映させる。その結果、目標物が存在する可能性のある区域を絞り込むことができるため、目標物が存在する可能性のある区域を精度よく推定できる。
【0014】
また、目標物が移動可能な領域を精度よく推定できるため、センサなどの目標物の監視すべき区域が明確になるため、目標物の監視すべき区域を決定することが容易にできる。
また、本来は移動してしまった目標物がその位置に残って消せない、ノイズによって誤探知してしまった目標物が残ってしまい消せないなどの、古い不要な情報が残存していたが、否定情報を反映させることで古い不要な情報の残存することを抑止できる。不要な情報の抑止により、現在の目標物の所在の特定が精度よく推定できる。
【0015】
以下図面に基づいて、本発明の実施形態について詳細を説明する。
目標物管理装置について説明する。
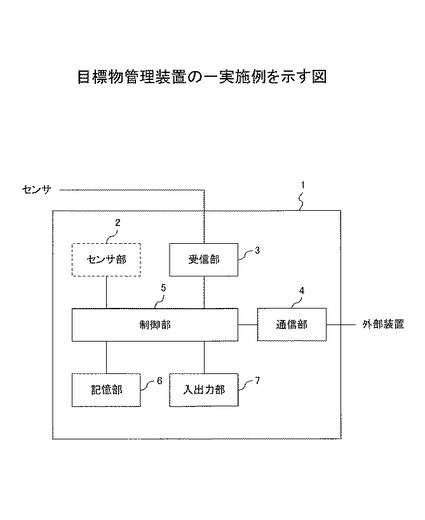
図1は、目標物管理装置の一実施例を示す図である。目標物管理装置1は、センサが探知した情報に基づいて目標物を管理する装置で、センサ部2、受信部3、通信部4、制御部5、記憶部6、入出力部7を備えている。目標物管理装置1は、例えば図2に示される監視対象範囲200に所在する目標物を探知した情報を、センサ203、204、205、206、207、208各々から取得して目標物を管理する。
【0016】
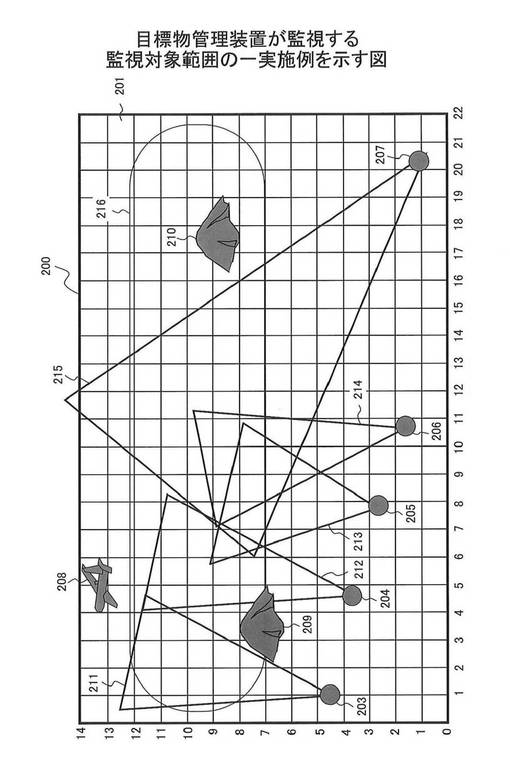
図2は、目標物管理装置が監視する監視対象範囲の一実施例を示す図である。監視対象範囲200は、目標物管理装置が目標物を監視する対象範囲であり、入出力部7などから入力される対象範囲を設定するデータを用いて決定される。また、監視対象範囲は予め設定される区域で分割した区域を複数有している。以降、監視対象範囲を分割した区域をメッシュと呼ぶ。メッシュは、図2では監視対象範囲200を複数の範囲に分割したメッシュ201として示している。本例では、メッシュ201は正方形状の範囲で表されている。また、メッシュ201の間隔は、想定する目標物によって異なるが、10m〜1000m程度を想定する。ただし、メッシュ形状、メッシュ間隔は上記に限定されるものではない。
【0017】
次に、図2の例ではセンサ203、204、205、206、207は、地上に配置されたセンサを示している。センサ208は航空機に設置されたセンサを示している。また、センサ203の監視領域を覆域211、センサ204の監視領域を覆域212、センサ205の監視領域を覆域213、センサ206の監視領域を覆域214、センサ207の監視領域を覆域215、センサ208の監視領域を監視領域216として示している。また、図2の監視対象範囲200には標高の高い地形(例えば、山)が所在し、この地形を山209、210として表している。
【0018】
図1のセンサ部2は、目標物管理装置1に設けられたセンサである。目標物管理装置1の本体にセンサ機能を設けてもよい。ただし、センサ部2を目標物管理装置1にかならずしも設けなくてもよい。
【0019】
受信部3は、各センサからセンサ情報、各センサが探知した結果を有する探知情報、各センサの覆域に目標物がないことを示す否定情報などを受信し、受信した探知情報を制御部5に転送する。センサ情報は、例えば、センサの識別子、位置、向きなどのデータを有している。探知情報は、探知した目標物の情報を有し探知した目標物を識別する識別子、目標物を観測した日時、目標物の位置、目標物の類別(人、車両など)などのデータを含んでいる。否定情報は、例えば、目標物を観測した日時、観測者の位置、観測手段、観測方位、存在しない目標物の類別、観測地域などのデータを含んでいる。センサ情報と探知情報と否定情報については後述する。
【0020】
通信部4は送信部と受信部を備えている。送信部は、例えば無線送信部、有線送信部を備え、受信部は無線受信部、有線受信部を備えている。無線送信部、無線受信部は、無線Local Area Network(LAN)、携帯電話、Personal Handyphone System(PHS)などの無線通信機である。また、有線送信部、有線受信部は、専用回線、公衆回線、LANを介してパーソナルコンピュータなどと通信ができる。
【0021】
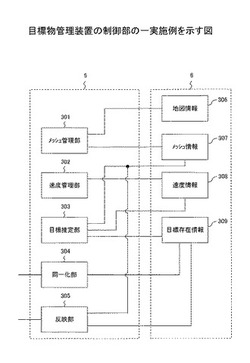
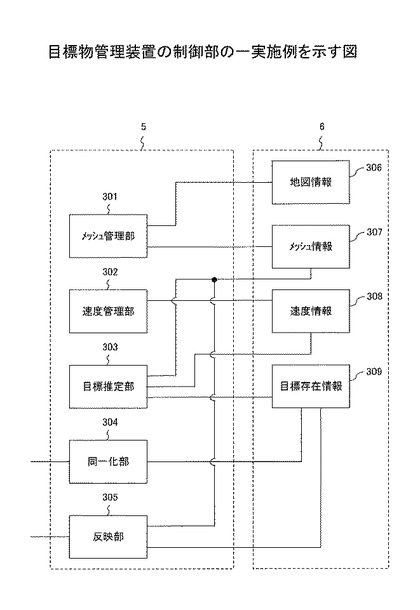
制御部5は、図3に示すようにメッシュ管理部301、速度管理部302、目標推定部303、同一化部304、反映部305などを備えている。図3は、目標物管理装置の制御部の一実施例を示す図である。制御部5は、Central Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いてもよい。
【0022】
メッシュ管理部301は、記憶部6に記憶されている地図情報を用いて、メッシュ情報を生成する。すなわち、監視対象範囲を一定の区域に区切り複数のメッシュを生成し、メッシュの位置を示す基準座標と、メッシュの幅と、移動可否と、移動時間係数と、を関連付ける。移動可否は、メッシュに目標物が移動できるか否かを示す。移動時間係数は、メッシュに対応する区域の状況に応じて目標物がメッシュを移動するのに要する時間を決定するために用いる係数である。監視対象範囲を一定の区域に区切ったメッシュごとに目標物の移動可否や後述する移動可能時間に関する係数を管理する。地図情報は、例えば、カーナビゲーションシステムで使用する地図情報などを用いることが考えられる。メッシュ情報については後述する。
【0023】
速度管理部302は、目標物の類別(例えば、人、車両など)と、類別ごとに予め決められた移動速度とを関連付けて速度情報を生成し、記憶部6に記憶する。
目標推定部303は、探知された目標物により決まる移動速度とメッシュの幅とを用いて、探知された目標物がメッシュ間を移動可能な更新周期を求める。続いて、更新周期ごとに探知された目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとする。続いて、探知された目標物と、目標物の類別と、更新周期の回数と、更新周期ごとに求めた目標存在メッシュと、を関連付けて目標存在情報に記憶する。
【0024】
また、目標推定部303は目標物の類別により決まる移動速度を用いて更新周期を変更する。
同一化部304は、観測日時と、探知した目標物の位置と、目標物の類別を有する探知情報を受信する。観測日時または直前の目標存在情報の更新周期の回数に対応する更新日時で、探知した目標物の位置が目標存在メッシュに含まれ、目標物の類別が目標存在情報の類別と同一である目標存在情報に記憶されている目標物を検出する。その後、検出した目標物が複数ある場合には目標存在メッシュの合計が小さい目標物を選択し、探知した目標物に関連付け、更新日時から現在の日時までに含まれる更新周期の回数の目標存在メッシュを求め、目標存在情報に記憶する。
【0025】
反映部305は、観測日時と、目標物が存在しない地域とを有する否定情報を受信すると、観測日時または直前の目標存在情報の更新周期の回数に対応する更新日時に関連付けられている目標存在メッシュを抽出する。続いて、目標物が存在しない地域が示すメッシュと一致する抽出した目標存在メッシュを目標物が存在しないメッシュにし、更新日時から現在の日時までに含まれる更新周期の回数の目標存在メッシュを求め、目標存在情報に記憶する。
【0026】
また、反映部は観測日時に観測を開始した開始日時と終了した終了日時を有する否定情報を受信すると、開始日時から終了日時の期間、否定情報が有する目標物が存在しない地域に目標存在メッシュがないとして目標存在メッシュを求める。
【0027】
上記のように、目標推定部303は目標物のメッシュ間を移動可能周期毎に、目標物の存在が推定されるメッシュに隣接するメッシュを求める。また、同一化部304は該目標物と新たに探知した目標物との同一化し、反映部305は目標物の不存在メッシュの特定をし、目標存在メッシュを求める。
【0028】
記憶部6は、プログラム、テーブル、データなどが記録されている。記憶部6は、地図情報、メッシュ情報、速度情報、目標存在情報、更新日時情報などが記憶されている。また、記憶部6は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)などのメモリやハードディスクなどである。また、記憶部6はパラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。また、記憶部6には制御部5により演算される結果が記録される。
【0029】
入出力部7は入力部と出力部を有している。入出力部7の入力部は、目標物管理装置1の各種設定を入力する。例えば、監視対象範囲などを入力する。また、入出力部7の出力部がディスプレイであれば、入力部としてディスプレイに設けられたタッチパネルなどが考えられる。また、キーボード、マウスなどが考えられる。なお、ディスプレイは、例えば、液晶ディスプレイ、Cathode Ray Tube(CRT)などが考えられる。出力部は、例えば、ディスプレイ、プリンタなどである。出力部は、制御部5の演算結果などを表示する。
【0030】
センサについて説明する。
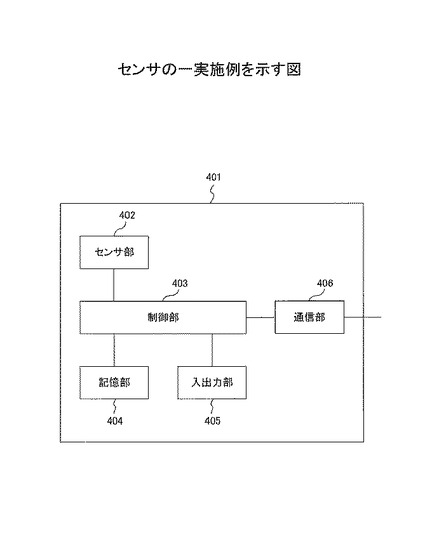
図4は、センサの一実施例を示す図である。図4に示すセンサ401(例えば、図2の203、204、205、206、207、208)は、センサ部402、制御部403、記憶部404、入出力部405、通信部406を備えている。
【0031】
センサ部402は、目標物を探知するためのレーダ装置、暗視装置、測距装置、撮影装置などである。例えば、カメラ、ビデオカメラなどを含む。レーダ装置は自らの送信部から電波を照射し、目標物から反射されて戻ってくる電波を受信機で受信することにより、目標物の距離、方向、移動速度、種別などの情報を得る装置である。例えば、センサとしてドップラレーダ(Doppler radar)装置などを用いることが好ましい。また、陸上において、目標物は人、一般車両、特殊車両、軍用車両など、海上においては人、旅客船(客船)、貨客船(貨客混載船)、貨物船、軍艦、巡視船、漁船、特殊船などを対象とし、さらに航空機(重航空機、軽航空機)などを対象としてもよい。
【0032】
また、地上の目標物を監視するセンサは、地上に設置したドップラレーダ装置の他に、飛行機(無人飛行機などを含む)やヘリコプタによる空中から撮影した動画像や静止画像により目標物を探知してもよい。なお、動画像や静止画像は、暗視装置、撮影装置などで撮影した情報であり、後述する地図データと撮影した情報を対応付けて記録してもよいし、また撮影した情報を解析して目標物を検知して記録してもよい。
【0033】
制御部403は、センサ401の各部の制御を行うとともに、センサ部402が観測した結果を取得して目標物管理装置1にセンサ情報、探知情報、否定情報などを送信する。制御部403は、Central Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いてもよい。
【0034】
記憶部404は、プログラム、テーブル、データなどが記録されている。また、記憶部404は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)などのメモリやハードディスクなどである。また、記憶部404はパラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。また、記憶部404には制御部403により演算される結果が記録される。
【0035】
入出力部405は、入力部と出力部を有している。入出力部405の入力部は、センサ401の各種設定を入力する。入出力部405の出力部がディスプレイであれば、入力部としてディスプレイに設けられたタッチパネルなどが考えられる。また、キーボード、マウスなどが考えられる。なお、ディスプレイは、例えば、液晶ディスプレイ、Cathode Ray Tube(CRT)などが考えられる。出力部は、例えば、ディスプレイ、プリンタなどである。
【0036】
通信部406は送信部と受信部を備えている。送信部は、例えば無線送信部、有線送信部を備え、受信部は無線受信部、有線受信部を備えている。無線送信部、無線受信部は、無線Local Area Network(LAN)、携帯電話、Personal Handyphone System(PHS)などの無線通信機である。また、有線送信部、有線受信部は、専用回線、公衆回線、LANを介して目標物管理装置1と通信ができる。
【0037】
センサの動作について説明する。
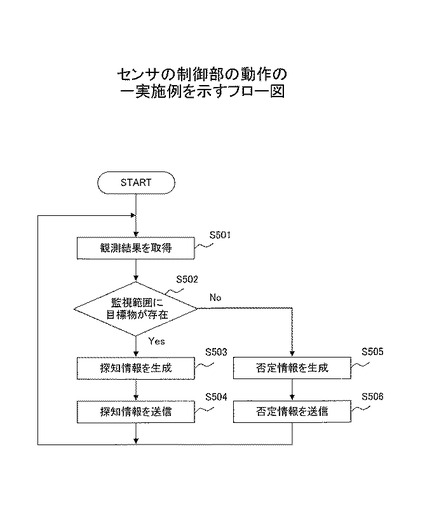
図5は、センサの制御部の動作の一実施例を示すフロー図である。ステップS501では、制御部403がセンサ部402から観測した結果を取得する。
【0038】
ステップS502では、制御部403が観測した結果を用いて監視範囲に目標物が存在するか否かを判定し、目標物が存在する場合にはステップS503(Yes)に移行し、目標物が存在しない場合にはステップS505(No)に移行する。
【0039】
ステップS503では制御部403が観測した結果を用いて探知情報を生成する。ステップS504では制御部403が探知情報を目標物管理装置1に送信する。また、目標物管理装置1にセンサ情報が記憶されていない場合には、センサ情報を目標物管理装置1に送信してもよい。
【0040】
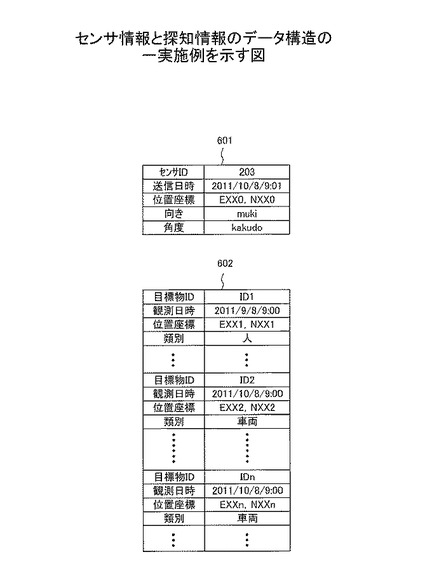
図6は、センサ情報と探知情報のデータ構造の一実施例を示す図である。センサ情報601は、「センサID」「送信日時」「位置」「向き」「角度」などに記憶する情報を有している。「センサID」は、センサを識別する識別子が記録され、本例では図2のセンサ203から送信されるセンサ情報であるので「203」が記録されている。「送信日時」は、センサがセンサ情報と探知情報を目標物管理装置に送信した日時が記録されている。本例では、センサ203がセンサ情報と探知情報を送信した日時として2011年10月8日午前9時1分を表す「2011/10/8/9:01」が記録されている。「位置座標」には、センサの配置されている位置(例えば、緯度、経度など)が記録されている。本例では、緯度、経度を表す「EXX0,NXX0」が記録されている。「向き」には、センサが配置されている向きが記録されている。本例では、センサの向きなどを表す「muki」が記録されている。「角度」には、センサが監視する角度などが記録されている。本例では、角度を表す「kakudo」が記録されている。なお、本例ではセンサ情報に「向き」「角度」が含まれているが、含まなくてもよい。
【0041】
探知情報602は、「目標物ID」「観測日時」「位置座標」「類別」などに記憶する情報を有している。「目標物ID」は、目標物を識別する識別子が記録されている。本例では、識別子として「ID1」「ID2」・・・「IDn」が記録されている。「観測日時」には、目標物を検知した日時が記録されている。本例では、センサ203が目標物ID1、ID2〜IDnを検知した日時として2011年10月8日午前9時を表す「2011/10/8/9:00」が記録されている。「位置座標」には、センサが探知した目標物の位置座標が記録されている。本例では、センサ203の探知した目標物ID1、ID2〜IDnまでの存在する位置座標を表す「EXX1,NXX1」「EXX2,NXX2」・・・「EXXn,NXXn」が記録されている。なお、「位置座標」としてセンサから目標物までの距離と方位を用いてもよい。「類別」には、目標物の類別を示す情報が記憶されている。本例では、人、車両などを示す「人」「車両」が考えられる。なお、本例では「目標物ID」「観測日時」「位置座標」「類別」を示したが、探知情報には目標物の移動速度などを含めてもよい。
【0042】
ステップS505では制御部403が否定情報を生成する。ステップS506では制御部403が否定情報を目標物管理装置1に送信する。また、目標物管理装置1にセンサ情報が記憶されていない場合には、センサ情報を目標物管理装置1に送信してもよい。
【0043】
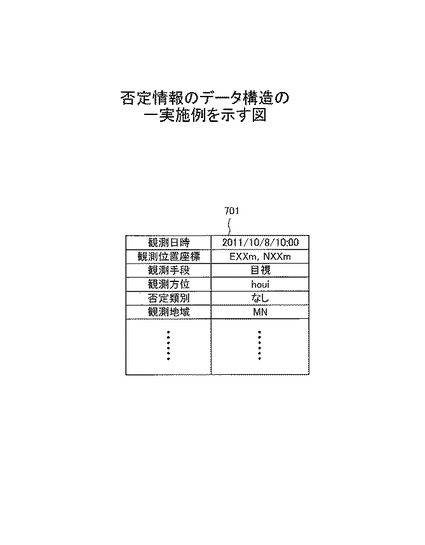
図7は、否定情報のデータ構造の一実施例を示す図である。否定情報701は、「観測日時」「観測位置座標」「観測手段」「観測方位」「否定類別」「観測地域」などに記憶する情報を有している。「観測日時」は、目視またはセンサにより目標物を観測した日時または観測した期間が記録されている。本例では、目視により観測をした日時として2011年10月8日午前10時を表す「2011/10/8/10:00」が記録されている。なお、観測した期間を記憶する場合に、例えば、2011年10月8日午前10時〜11時までの間であれば「2011/10/8/10:00〜2011/10/8/11:00」を記憶することが考えられる。「観測位置座標」には、センサの配置されている位置(例えば、緯度、経度など)が記録されている。本例では、緯度、経度を表す「EXXm,NXXm」が記録されている。「観測位置座標」には、人が目視により目標物を観測する場合には観測者の位置座標、またセンサが観測する場合にはセンサの位置座標が記録されている。本例では、観測者が目標物を観測した位置座標を表す「EXXm,NXXm」が記録されている。「観測手段」には、目標物を観測する手段が記憶されている。本例では、目標物を観測する手段を表す情報として「目視」「レーダ」などが記憶されている。「観測方位」には、目視またはセンサにより目標物を観測する方位が記憶されている。本例では、目標物を観測する方位を表す情報として「houi」などが記憶されている。「houi」には、例えば、目標物を観測できる方位として角度0°以上〜360°未満を示す情報を記憶することが考えられる。または、全方位を観測可能な場合には全方位を示す情報を記憶してもよい。「否定類別」には、目視またはセンサにより目標物を観測した結果として観測している範囲に目標物がないことを示す情報が記憶される。本例では、観測している範囲に目標物がないことを示す「なし」が記憶されている。なお、観測している範囲に人がいるが車両がいない場合には、車両がいないことを示すことを示す情報を記憶してもよい。例えば、「車両なし」。また、観測している範囲に人がいないが車両がいる場合には、人がいないことを示すことを示す情報を記憶してもよい。例えば、「人なし」。ただし、人と車両に限定されるものではない。「観測地域」には、観測者が観測している範囲に対応付けられている地域の名称などが記憶されている。本例では、地域を示す情報として「MN」が記憶されている。
【0044】
目標物管理装置の動作について説明する。
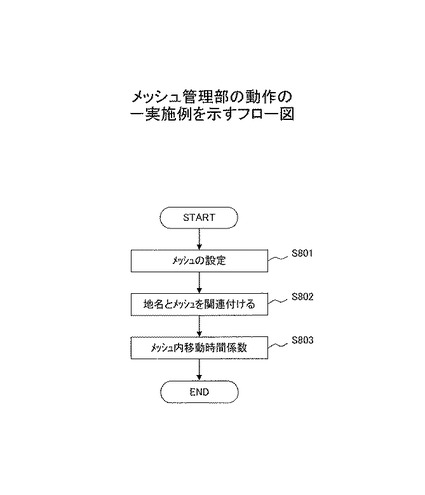
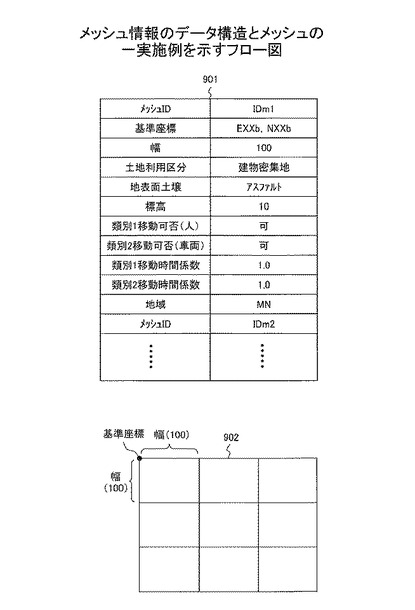
目標物管理装置1のメッシュ情報の生成について図8を用いて説明する。図8は、メッシュ管理部の動作の一実施例を示すフロー図である。ステップS801では、メッシュ管理部301が地図情報を取得し、地図情報の監視対称範囲に対応する場所に決められたメッシュを設定する。ステップS802では、メッシュ管理部301がステップS801で設定したメッシュ各々に地域名を関連付ける。ステップS803では、メッシュ管理部301がメッシュ各々に対応付けられている地域において、目標物が移動できる時間を相対的に示す移動時間係数を設定する。ステップS801〜S803の処理によりメッシュ情報が生成される。図9は、メッシュ情報のデータ構造とメッシュの一実施例を示すフロー図である。図9のメッシュ情報901は、「メッシュID」「基準座標」「幅」「土地利用区分」「地表面土壌」「標高」「類別1移動可否」「類別2移動可否」「類別1移動時間係数」「類別2移動時間係数」「地域」などに記憶する情報を有している。「メッシュID」には、メッシュを識別する情報が記憶されている。本例では、メッシュを識別する情報として「IDm1」「IDm2」・・・・が記憶されている。「基準座標」には、メッシュの位置を特定するための基準となる位置座標(基準座標)が記憶されている。本例では、基準座標を示す情報として「EXXb,NXXb」が記憶されている。「幅」には、メッシュの基準座標からの距離を示す情報が記憶されている。本例では、図9に示す正方形のメッシュ902の幅を示す情報「100」が記憶されている。ただし、メッシュの形状は正方形でなくてもよく、正方形以外の場合には幅だけでなくメッシュの面積を特定できる情報を記憶することが考えられる。「土地利用区分」には、メッシュが割り振られている地域がどのような地域であるかを示す情報が記憶されている。例えば、建物密集地、田畑、森林、荒地などを識別する情報が記憶される。本例では、「建物密集地」が記憶されている。「地表面土壌」には、メッシュが割り振られている地域がどのような地表面土壌であるかを示す情報が記憶されている。例えば、砂、土、アスファルトなどを識別する情報が記憶される。本例では、「アスファルト」が記憶されている。「標高」には、メッシュが割り振られている地域の標高が記憶されている。本例では、標高10mを示す「10」が記憶されている。「類別1移動可否」「類別2移動可否」には、メッシュを移動できるか否かを示す情報が記憶されている。本例では、類別1として人が移動できることを示す情報として「可」が示され、類別2として車両が移動できることを示す情報として「可」が示されている。
【0045】
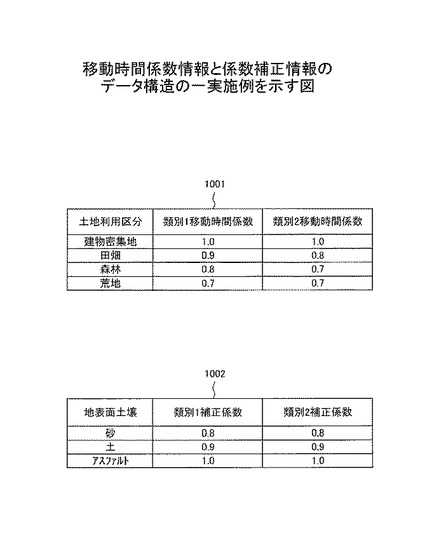
「類別1移動時間係数」「類別2移動時間係数」には、メッシュを移動する時間に関する係数が記憶されている。移動時間係数は、メッシュに対応する監視対象領域の状況に応じて決まる係数で、例えば、土地利用区分や地表面土壌を用いて求められる。図10は、移動時間係数情報と係数補正情報のデータ構造の一実施例を示す図である。図10に示す移動時間係数情報1001は、「土地利用区分」「類別1移動時間係数」「類別2移動時間係数」に記憶される情報を有している。「土地利用区分」には、「建物密集地」「田畑」「森林」「荒地」などを示す情報が記憶されている。「類別1移動時間係数」「類別2移動時間係数」には、例えば、予め決められた移動時間係数が「土地利用区分」に記憶されているそれぞれの情報に関連付けて設定される。本例では、「類別1移動時間係数」には、「建物密集地」に対応する「1.0」、「田畑」に対応する「0.9」、「森林」に対応する「0.8」、「荒地」に対応する「0.7」が記憶されている。また、「類別2移動時間係数」には、「建物密集地」に対応する「1.0」、「田畑」に対応する「0.8」、「森林」に対応する「0.7」、「荒地」に対応する「0.7」が記憶されている。「1.0」は、人や車両が通常の速度で移動できることを示している。移動時間係数は1.0より小さくなるに従って移動が困難になることを示している。図10に示す係数補正情報1002は、「地表面土壌」「類別1補正係数」「類別2補正係数」に記憶される情報を有している。「地表面土壌」には、「砂」「土」「アスファルト」などを示す情報が記憶されている。「類別1補正係数」「類別2補正係数」には、例えば、予め決められた補正係数が「地表面土壌」に記憶されているそれぞれの情報に関連付けて設定される。本例では、「類別1補正係数」には、「砂」に対応する「0.8」、「土」に対応する「0.9」、「アスファルト」に対応する「1.0」が記憶されている。また、「類別2補正係数」には、「砂」に対応する「0.8」、「土」に対応する「0.9」、「アスファルト」に対応する「1.0」が記憶されている。なお、係数補正情報は用いなくてもよい。
【0046】
「地域」には、メッシュが設定されている地域の名称や道路などに関連する情報が記憶されている。本例では、地域を示す情報「MN」が記憶されている。なお、人からの否定情報が地名で通知されることを考慮して、該当メッシュに対応し地名を対応地名として管理することが考えられる。地域は地図情報を参照して求めることが望ましい。
【0047】
目標物管理装置1による速度情報の生成について説明する。
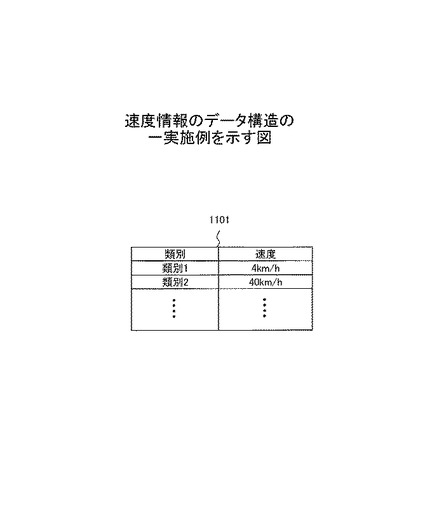
例えば、類別された目標物に対応する速度を利用者が入力し、該入力を用いて速度管理部302は図11に示すような速度情報を生成する。図11は、速度情報のデータ構造の一実施例を示す図である。図11の速度情報は、「類別」「速度」に記憶される情報を有する。「類別」には目標物を類別した情報が記憶される。例えば、人や車両などが考えられる。本例では、「類別1」「類別2」・・・・が記憶されている。「速度」には類別された目標物の移動速度を示す情報が記憶される。例えば、人や車両などの移動速度が考えられる。本例では、「類別1」に関連付けて「4km/h」が記憶されている。また、「類別2」に関連付けて「40km/h」が記憶されている。
【0048】
目標物管理装置1の目標推定部、同一化部、反映部について説明する。
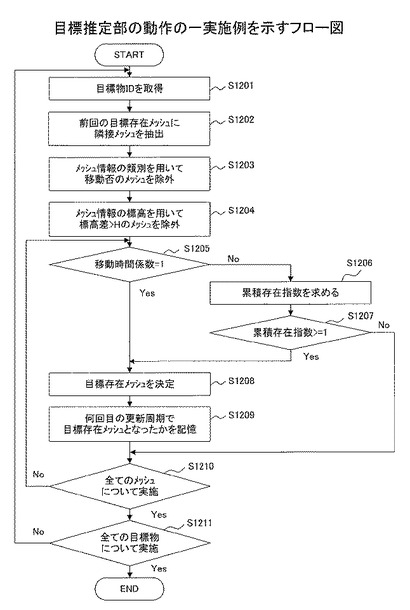
図12は、目標推定部の動作の一実施例を示すフロー図である。
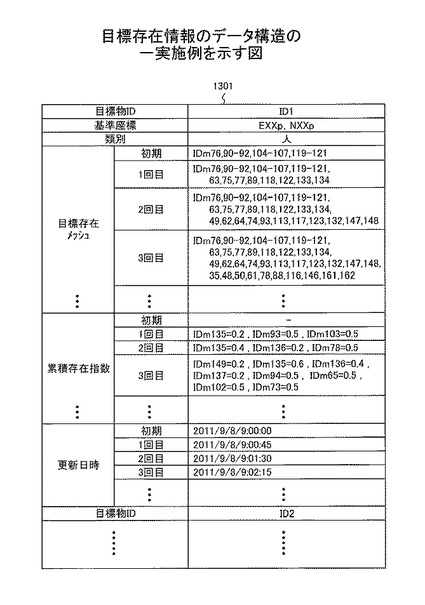
ステップS1201では、目標推定部303が目標存在情報309に記憶されている目標物IDを取得する。目標存在情報309について説明する。図13は、目標存在情報のデータ構造の一実施例を示す図である。図13の目標存在情報1301は、「目標物ID」「基準座標」「類別」「目標存在メッシュ」「累積存在指数」「更新日時」・・・・に記憶される情報を有している。「目標物ID」には、目標物を識別する情報が記憶されている。本例では、目標物を識別する情報「ID1」「ID2」・・・・が記憶されている。なお、目標物IDは目標物が新たに探知されると追加される。「基準座標」には、「目標物ID」に対応する目標物が探知された位置の座標を示す情報が記憶されている。本例では、目標物が探知された位置の座標を示す情報「EXXp,NXXp」が「ID1」に関連付けられて記憶されている。なお、新たな目標物が探知されと新たな目標物に関連する基準座標が追加される。「類別」には、「目標物ID」に対応する目標物の類別を示す情報が記憶されている。本例では、目標物の類別を示す情報「人」が「ID1」に関連付けられて記憶されている。なお、新たな目標物が探知されると新たな目標物に関連する類別が追加される。
【0049】
「目標存在メッシュ」には、後述する更新周期ごとに目標物が移動して存在すると推定される目標物存在メッシュを識別する情報が記憶されている。本例では、「目標物ID」に関連付けられている更新周期の回数を示す「初期」「1回目」「2回目」「3回目」・・・・に関連付けられてメッシュIDが記憶されている。「初期」には目標存在メッシュ「IDm76,90−92,104−107,119−121」が記憶されている。「1回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」が記憶されている。「2回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148」が記憶されている。「3回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162」が記憶されている。
【0050】
「累積存在指数」には、目標物が移動可能であるがまだ隣接するメッシュに存在していないと推定される場合に、更新周期の回数ごとに累積存在指数を求めてその推定される隣接するメッシュに記憶されている。本例では、「目標物ID」に関連付けられている更新周期の回数を示す「初期」「1回目」「2回目」「3回目」・・・・に関連付けられてメッシュとそのメッシュに対応するが累積存在指数が記憶されている。「初期」にはメッシュとそのメッシュに対応するが累積存在指数がないことを示す「−」が記憶されている。「1回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm135=0.2,IDm93=0.5」が記憶されている。「2回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm135=0.4,IDm136=0.2,IDm78=0.5」が記憶されている。「3回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm149=0.2,IDm135=0.6,IDm136=0.4,IDm137=0.2,IDm94=0.5,IDm65=0.5,IDm102=0.5,IDm73=0.5」が記憶されている。
【0051】
「更新日時」には更新するごとに日時が記憶されている。本例では、2011年9月8日9時から更新を45秒ごとすることを示す更新日時が示されている。「初期」には「2011/9/8/9:00:00」、「1回目」には「2011/9/8/9:00:45」、「2回目」には「2011/9/8/9:01:30」、「3回目」には「2011/9/8/9:02:15」、「4回目」には「2011/9/8/9:03:00」、「5回目」には「2011/9/8/9:03:45」・・・・が記憶されている。 図14に示すフローを用い更新周期の求め方について説明する。
【0052】
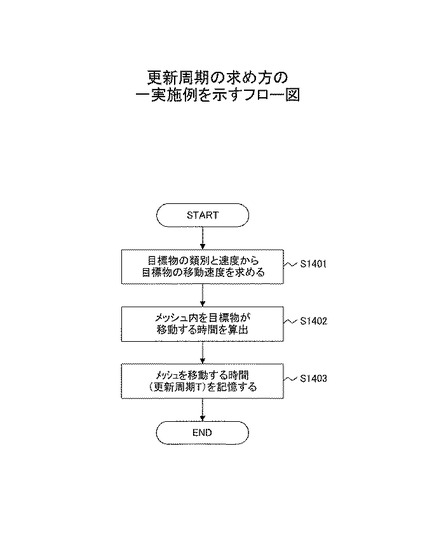
図14は、更新周期の求め方の一実施例を示すフロー図である。ステップS1401では、目標推定部303が目標物の類別と速度から目標物の移動速度を求める。例えば、探知した目標物を用いて、速度情報308を参照し、移動速度を求める。図11の速度情報1101の場合に探知した目標物の類別が類別1であれば4km/hを移動速度とする。また、探知した目標物の類別が類別2であれば40km/hを移動速度とする。
【0053】
ステップS1402では、目標推定部303がメッシュ内を目標物が移動する時間(更新周期)を算出する。例えば、探知した目標物が存在するメッシュの幅をメッシュ情報307から取得し、取得した幅とステップS1401で求めた移動速度を用いて、更新周期を求める。メッシュの幅が50mで、移動速度が4km/hの場合の更新周期Tは、50m/4km×3600秒=45秒となる。
なお、更新周期は上記方法により求めてもよいし、利用者が変更してもよい。
【0054】
ステップS1403では、目標推定部303がステップS1402で求めたメッシュを移動する時間(更新周期T)を目標存在情報に記憶する。
【0055】
ステップS1202では、目標推定部303が目標存在情報309を参照して前回の目標存在メッシュに隣接するメッシュを抽出する。図13の目標存在情報1301の場合において、現在の更新周期の回数が2回目になった場合、1回目に関連付けられて記憶されている目標物ID1の目標存在メッシュを抽出する。目標存在メッシュは「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」である。なお、更新周期の回数が2回目のときは目標存在情報1301には2回目以降の目標存在メッシュは記憶されていない。
【0056】
ステップS1203では、目標推定部303がメッシュ情報307の類別移動可否を示す情報を参照して、移動ができないことを示す情報「否」がある場合には監視対象範囲からそのメッシュを除外する。すなわち、目標物が移動できないメッシュには目標物が存在しないと推定する。図9のメッシュIDm1の場合、「類別1移動可否(人)」が「可」であり、「類別2移動可否(車両)」が「可」であるので、人または車両が移動できるメッシュである。「類別1移動可否(人)」が「否」であり、「類別2移動可否(車両)」が「否」が記憶されていれば人または車両が移動できないメッシュとなる。
【0057】
ステップS1204では、目標推定部303が前回抽出されたメッシュと隣接するメッシュにそれぞれに対応するメッシュ情報307の標高を示す情報を取得する。続いて、前回抽出されたメッシュと隣接するメッシュの標高差を求め、その標高差が閾値Hより大きいか否かを判定する。標高差が閾値Hより大きいとき(標高差>閾値H)監視対象範囲からそのメッシュを除外する。すなわち、隣接するメッシュとの標高差が大きいため目標物が隣接するメッシュに移動できないとして、隣接するメッシュには目標物が存在しないと推定する。
【0058】
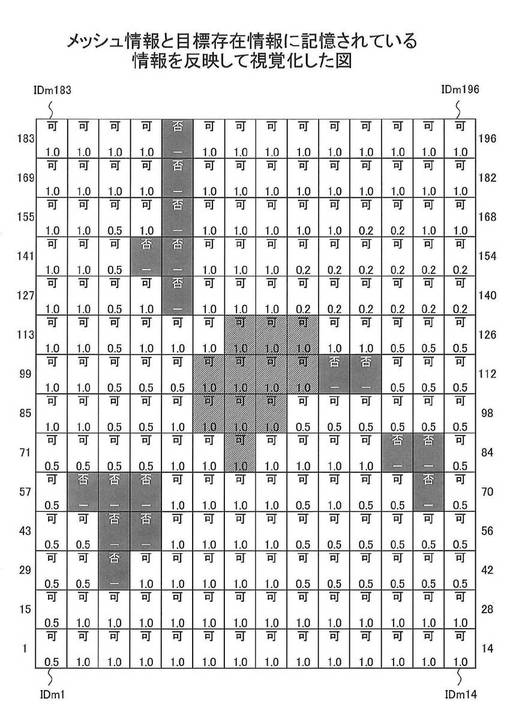
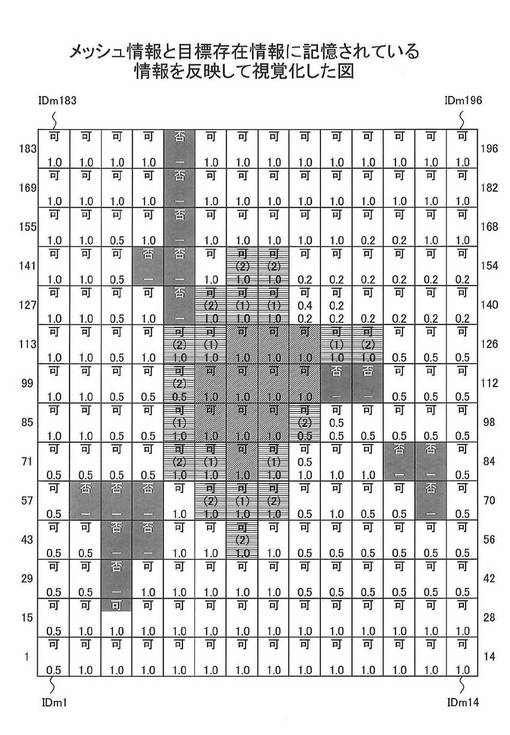
図15〜図20は、メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。図15〜図20にはステップS1203にて除外するメッシュに「否」が示されている。なお、ステップS1204にて除外するメッシュは接する方向により異なるので、ここでは標高差による除外はないという例を示している。
【0059】
ステップS1205では、目標推定部303がメッシュ情報307の移動時間係数を示す情報を参照し、移動時間係数が1であるか否かを判定し、移動時間係数=1であればステップS1208(Yes)に移行する。移動時間係数≠1であればステップS1206(No)に移行する。すなわち、移動時間係数が1であれが更新周期内に隣接するメッシュに移動できると推定し、移動時間係数が1より小さい場合には更新周期内に隣接するメッシュに移動できない可能性があると判定する。図9のメッシュIDm1の場合、「類別1移動時間係数」が「1.0」であり、「類別2移動時間係数」が「1.0」であるので、人または車両が更新周期内に隣接するメッシュに移動できると推定できる。
【0060】
ステップS1206では、目標推定部303が累積存在指数を求める。累積存在指数は、前回の累積存在指数に移動時間係数を加算した数値である。例えば、目標物が人で移動時間係数が0.5であるとき、前回の累積存在指数が0.5であるとき今回求める累積存在指数が1.0になる。すなわち、更新周期の回数が2回で隣接するメッシュに目標物が移動できると推定する。なお、更新周期の回数が初期の場合、前回の累積存在指数は「0」になる。
【0061】
ステップS1207では、目標推定部303が累積存在指数の示す数値が1以上であるか否かを判定し、1以上である場合(累積存在指数≧1)にはステップS1208(Yes)に移行する。1より小さい場合(累積存在指数<1)にはステップS1210(No)に移行する。すなわち、隣接するメッシュに目標物が移動できると推定する。
【0062】
ステップS1208で目標推定部303は、目標物が存在するメッシュに隣接するメッシュを目標存在メッシュに決定する。
ステップS1209では、目標推定部303が何回目の更新周期で目標存在メッシュとなったかを記憶する。例えば、3回目の更新周期であれば図13の目標存在情報1301に、3回目の行(例えば、レコード)を生成して、目標存在メッシュを識別する情報を記憶する。
【0063】
ステップS1210では、目標推定部303が監視対象範囲の全てのメッシュについてステップS1205〜S1209に対応する処理を実施したか否かを判定する。すべてのメッシュに対して処理をしている場合にはステップS1211(Yes)に移行し、未処理のメッシュがある場合にはステップS1205(No)に移行する。メッシュ情報901に記憶されている全てのメッシュについて処理をしたか否かを判定する。
【0064】
ステップS1211では、目標推定部303が探知されている全ての目標物についてステップS1201〜S1209に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS1201(No)に移行する。探知した全ての目標物各々に対して目標物が移動する可能性があるメッシュを求めたら、処理を終了する。ステップS1211からステップS1201に移行した場合には、ステップS1201で次の目標物IDを取得する。
【0065】
図15〜図20を用いて更新周期における目標存在メッシュの状態を説明する。
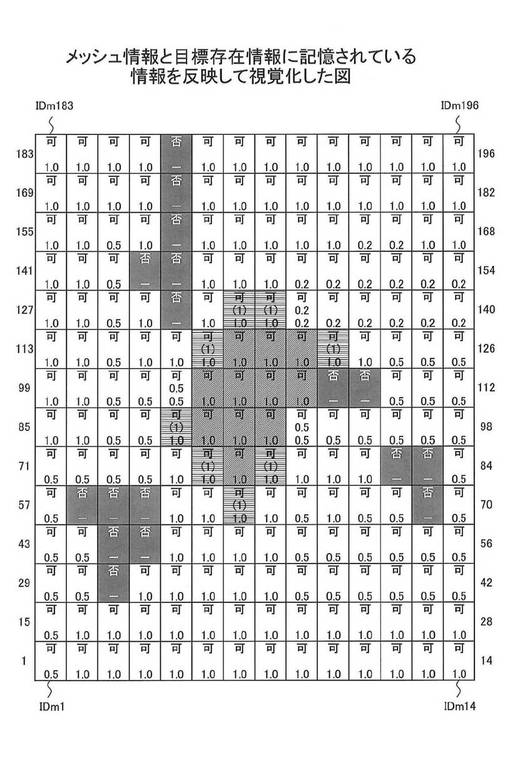
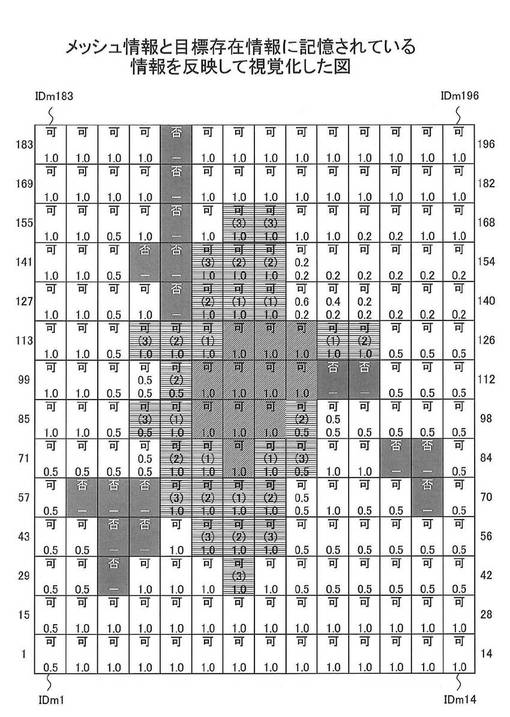
図15〜図20に示すメッシュを識別する情報は、IDm1〜IDm14(1行目:最下位の行)、IDm15〜IDm28(2行目)、IDm29〜IDm42(3行目)・・・IDm183〜IDm196(14行目:最上位の行)の順番で割り振られている。図15〜図20に示されているメッシュ上段の「可」はメッシュ情報901の目標物が移動可能を示し、「否」はメッシュ情報901の目標物が移動できないことを示している。また、図15〜図20に示されているメッシュ下段の「1.0」「0.5」「0.2」などは目標物に対応する移動時間係数を示している。図16〜図20に示されているメッシュ中段の「(1)」「(2)」「(3)」「(4)」「(5)」は目標存在メッシュに決定した更新周期の回数を示している。図16〜図20に示されているメッシュ中段の「0.2」「0.4」「0.6」「0.8」「0.5」は累積存在指数を示している。
【0066】
図15には、初期の更新周期の目標存在メッシュとしてIDm76,90−92,104−107,119−121」が記憶されている。なお、電源投入時には目標存在メッシュは示されていない。目標存在メッシュは、探知情報を受信して更新周期になった場合に更新される。なお、電源断時に現在の目標存在メッシュを記憶し、電源の再投入時に記憶しておいた目標存在メッシュを使用するか否かを問い合わせてもよい。使用する場合には、記憶しておいた目標存在メッシュを使用して、現在の日時までの更新周期分の目標存在メッシュを求める。記憶しておいた目標存在メッシュを使用しない場合には、目標存在メッシュがない状態から開始する。なお、電源投入時には累積存在指数(メッシュ中段)はまだ求められていないため示されていない。
【0067】
図16には、1回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」が記憶されている。「IDm63,75,77,89,118,122,133,134」が目標存在メッシュとして増加している。移動できないメッシュ(「否」)は除外されるため、目標存在メッシュIDm107に隣接するメッシュIDm108は除外される。また、累積存在指数を求める対象のメッシュには「IDm135=0.2,IDm93=0.5,IDm103=0.5」が記憶されている。例えば、目標存在メッシュIDm92、107に隣接するメッシュIDm93は、移動時間係数が0.5なので1回目の更新周期では累積存在指数0.5が求められる。他のメッシュについての説明は省略する。
【0068】
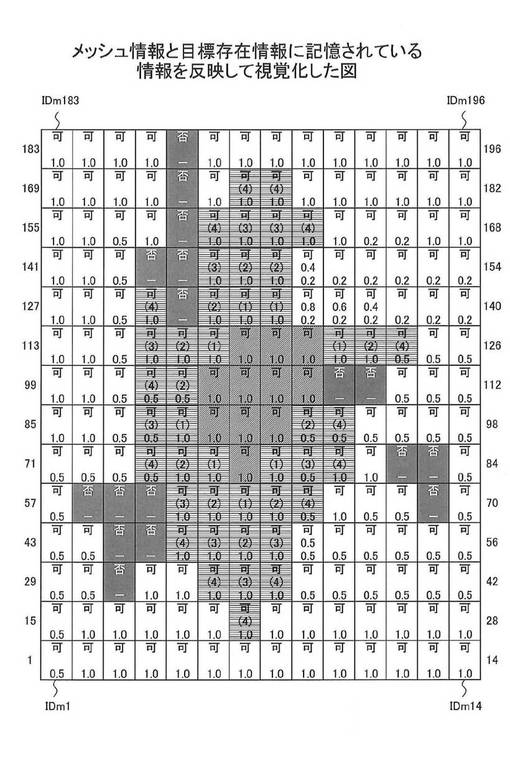
図17には、2回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm135=0.4,IDm136=0.2,IDm78=0.5」が記憶されている。例えば、メッシュIDm134、121に隣接するメッシュIDm135は、移動時間係数が0.2なので1回目の更新周期では累積存在指数0.2が求められ、2回目の更新周期では累積存在指数0.4が求められる。さらに、メッシュIDm135と目標存在メッシュIDm122に隣接するメッシュIDm136の累積存在指数0.2が求められる。他のメッシュについての説明は省略する。
【0069】
図18には、3回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.2,IDm135=0.6,IDm136=0.4,IDm137=0.2,IDm94=0.5,IDm65=0.5,IDm102=0.5,IDm73=0.5」が記憶されている。
【0070】
図19には、4回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162,21,34,36,47,65,73,79,102,123,130,160,163,175,176」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.6,IDm135=0.8,IDm136=0.6,IDm137=0.4,IDm51=0.5」が記憶されている。
【0071】
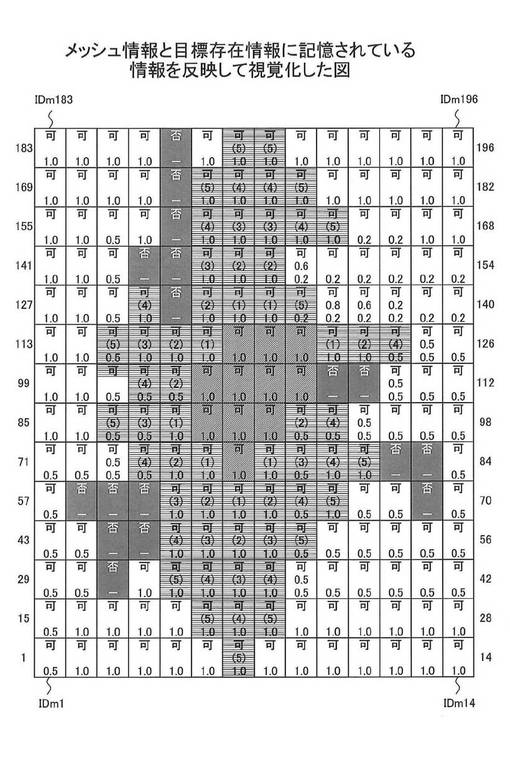
図20には、5回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162,21,34,36,47,65,73,79,102,123,130,160,163,175,176,7,20,22,33,51,66,80,87,115,135,164,174,177,189,190」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.6,IDm136=0.8,IDm137=0.6,IDm138=0.2,IDm110=0.5、IDm95=0.5、IDm37=0.5、IDm73=0.5」が記憶されている。
【0072】
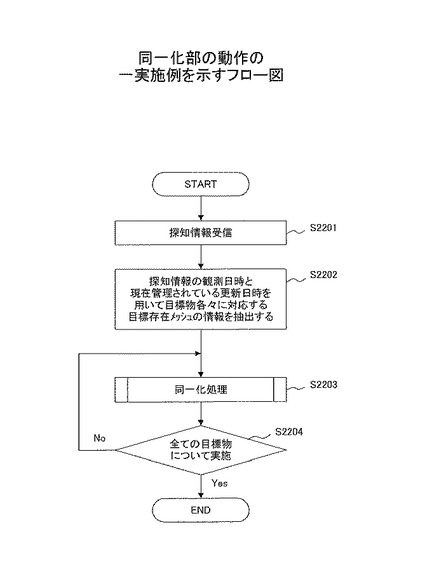
図21は、同一化部の動作の一実施例を示すフロー図である。図22は、同一化部の同一化処理の動作の一実施例を示すフロー図である。
ステップS2201では、同一化部304が探知情報をセンサから受信する。
【0073】
ステップS2202では、同一化部304が探知情報の観測日時を用いて、目標物に対応する目標存在情報と更新日時情報を参照し、観測日時または観測日時の直前に更新された更新日時に対応する目標存在メッシュの情報を目標存在情報309より取得する。現在目標存在情報309により管理されている複数の目標物各々に対して、目標物各々に対応する目標存在メッシュの情報を抽出する。
【0074】
ステップS2203では、同一化部304が探知情報に含まれる目標物各々に対して後述する同一化処理を行う。図22のフロー図を参照。
ステップS2204では、同一化部304が全ての探知情報に含まれる目標物全てについてステップS2201〜S2203の処理を実施したか否かを判定し、全て処理を実施していればこの処理を終了(Yes)する。また、未処理がある場合はステップS2201(No)に移行する。
【0075】
同一化処理について説明する。
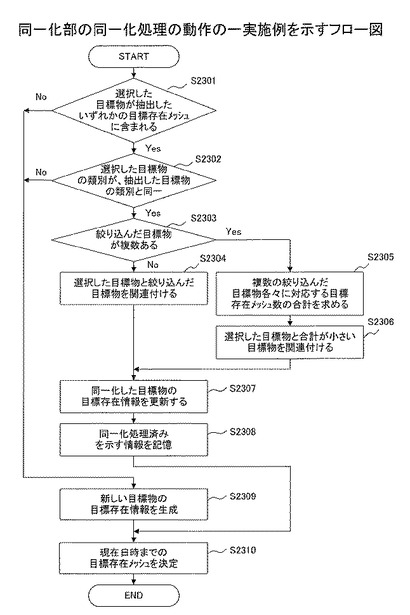
ステップS2301では、同一化部304が探知情報に含まれる現在選択されている目標物の位置座標を含むメッシュが、ステップS2202で抽出した目標物に対応する目標存在メッシュに含まれるか否かを判定する。含まれていればステップS2302(Yes)に移行し、含まれていなければステップS2308(No)に移行する。例えば、抽出した目標物に対応する目標存在メッシュが、目標物ID1〜IDn各々に対して生成された目標存在メッシュであるとする。nは1以上の整数とする。目標物ID1〜IDnに対応する目標存在情報各々に含まれる目標存在メッシュに、探知情報に含まれる目標物の位置座標を含むメッシュが含まれるか否かを判定し、含まれていればステップS2302(Yes)に移行する。また、探知情報に含まれる目標物の位置座標を含むメッシュが、含まれる目標存在メッシュに対応する目標物を識別するIDを抽出して記憶する。なお、探知情報に含まれる現在選択されている目標物の位置座標を含むメッシュが、目標物ID1〜IDnに対応する目標存在情報各々に含まれる目標存在メッシュに含まれていない場合、新しい目標物が探知されたと推定する。ステップS2301により、現在管理されている複数の目標物の中から、探知された目標物と一致する目標物を絞り込むことができる。
【0076】
ステップS2302では、同一化部304が探知情報に含まれる現在選択されている目標物の類別が、ステップS2301で抽出されたいずれかの目標物の類別と同一であるか否かを判定し、同一であればステップS2303(Yes)に移行する。その際、類別が同一の目標物を識別するIDを記憶する。全てのステップS2301で判定された目標物に対応する目標存在メッシュの類別が、現在選択されている目標物の類別と一致しない場合はステップS2308(No)に移行する。ステップS2302により、現在管理されている複数の目標物の中から、探知された目標物と一致する目標物がさらに絞り込むことができる。
【0077】
ステップS2303では、同一化部304がステップS2302で判定された類別が同一の目標物の数が複数あるか否かを判定し、複数ある場合にはステップS2305(Yes)に移行し、1つの場合にはステップS2304(No)に移行する。
【0078】
ステップS2304では、同一化部304が探知情報に含まれる現在選択されている目標物と、絞り込まれた1つの目標物を関連付ける。例えば、絞り込んだ目標物がID1であれば、現在選択されている目標物をID1と関連付け、目標物の同一化を行う。
【0079】
ステップS2305では、同一化部304が複数の絞り込んだ目標物各々に対応する目標存在メッシュ数の合計を求める。ステップS2306では、同一化部304が探知情報に含まれる現在選択されている目標物と目標存在メッシュ数の合計が小さい目標物を関連付け、目標物の同一化を行う。
【0080】
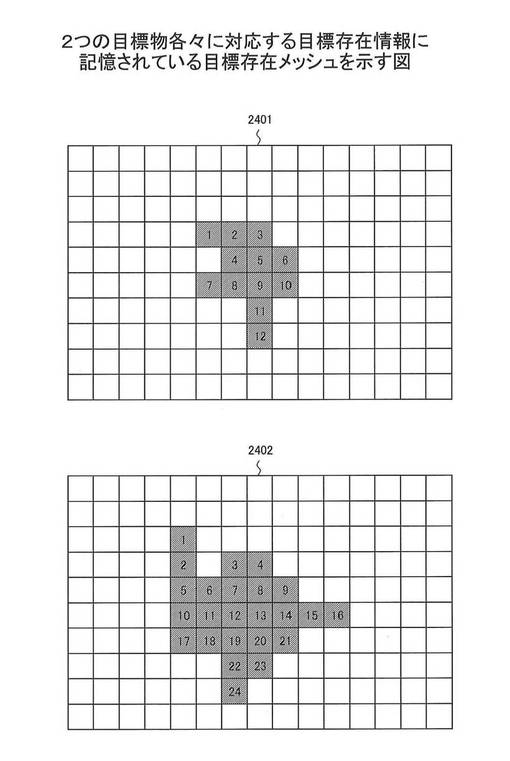
例えば、絞り込まれた目標物が2つの場合に、2つの目標物各々に対応する目標存在情報309に記憶されている目標存在メッシュについて図23に示す。図2401は絞り込まれた一方の目標物の監視対称範囲と目標存在メッシュを示し、図2402は絞り込まれた他方の目標物の監視対称範囲と目標存在メッシュを示す。図2401の目標存在メッシュ数(斜線)の合計は12で、図2402の目標存在メッシュ数(斜線)の合計が24である。その場合、ステップS2305で求めた図2401に対応する目標存在メッシュ数の合計の方が小さいので、合計値の小さい目標存在メッシュを関連する目標物を選択する。続いて、探知情報に含まれる現在選択されている目標物と合計が小さい目標物を関連付ける。
【0081】
ステップS2307では、同一化部304がステップS2304またはステップS2306で同一化した目標物の目標存在情報を更新する。同一化した目標物の目標存在情報の「基準座標」に現在記憶されている情報に、同一化した目標物の基準座標を上書きして「基準座標」を更新する。その際、目標推定部303で行う目標存在メッシュの推定で用いる基準となるメッシュの位置が変更される。
【0082】
ステップS2308で同一化部304は、目標存在情報の抽出対象の目標物が、今回の探知情報に含まれるいずれかの目標物と同一化処理済であるかどうかを管理し、既に同一化処理済の抽出対象の目標物は同一化処理の対象から除外する。既に同一化処理済の抽出対象の目標物には、目標存在情報に同一化処理済みを示す情報を記憶する。例えば、目標存在情報に同一化処理済みであること示す情報を記憶する「同一化処理済み」を設け、「1」または「0」などを記憶する。「1」は同一化処理済みを示し、「0」は同一化処理が未処理であることを示すようにする。ただし、同一化処理済みに関する処理は上記に限定されるものではない。
【0083】
なお、「同一化処理済み」に「1」が設定されている場合にはステップS2307で同一化部304は目標存在情報の更新をしなくてもよい。
【0084】
ステップS2309では、同一化部304が新しい目標物を探知したとして、新しい目標物に対応する目標存在情報を生成して、記憶部6に記憶する。
ステップS2310では、同一化部304が現在選択されている目標物に関して、探知情報の観測日時から現在の日時まで目標物が存在するメッシュを基準として、目標存在メッシュを決定する。例えば、目標推定部303で説明したように目標物が移動可能なメッシュを推定することが考えられる。
【0085】
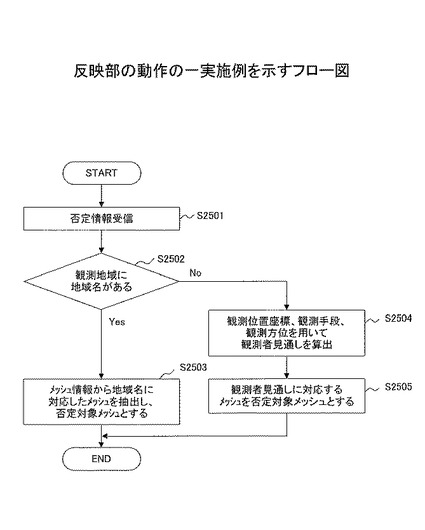
図24は、反映部の動作の一実施例を示すフロー図である。
ステップS2501では、反映部305が否定情報受信をセンサなどから受信する。
ステップS2502では、反映部305が否定情報の観測地域を参照して観測地域に地名が設定されているか否かを判定し、地名が設定されていればステップS2503(Yes)に移行し、地名が設定されていなければステップS2504(No)に移行する。例えば、図7に示す否定情報701を受信した場合には地名「MN」が記憶されているのでステップS2503に移行する。
【0086】
ステップS2503では、反映部305がメッシュ情報307から地域名に対応したメッシュを抽出し、否定対象メッシュを決定する。例えば、否定情報の観測地域に「MN」がある場合、図9のメッシュ情報901の「地域」に対応する情報を参照すると「MN」が記憶されているので、該メッシュを否定対象メッシュに決定する。
【0087】
ステップS2504では、反映部305が否定情報の「観測位置座標」「観測手段」「観測方位」などを用いて観測者見通しを算出する。観測者見通しは観測者が見通せる範囲で、例えば、観測者またはセンサなどにより目標物を監視する場合に、観測者の位置から観測する方位(方向)により決まる範囲である。また、障害物(例えば、山、建造物など)がある場合には障害物より先が見えないため、観測者見通しの範囲から除外される。なお、観測者見通しは既存の技術により求めることができる。
ステップS2505では、反映部305がステップS2504で求めた観測者見通し(範囲)に対応するメッシュを否定対象メッシュとする。
【0088】
図25〜図28を用いて、否定情報がある時点の一時的な情報である場合に行う反映処理について説明する。
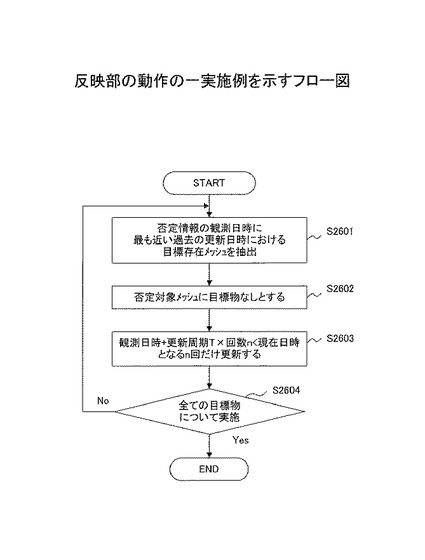
図25は、反映部の動作の一実施例を示すフロー図である。
ステップS2601では、反映部305が否定情報の観測日時に最も近い過去の更新日時における目標存在メッシュを抽出する。反映部305は、否定情報の観測日時を用いて、目標存在情報309に記憶されている目標物の更新周期の回数(「初期」「1」「2」・・・)を参照し、目標物において最も近い過去の更新日時に対応する目標存在メッシュを抽出する。
【0089】
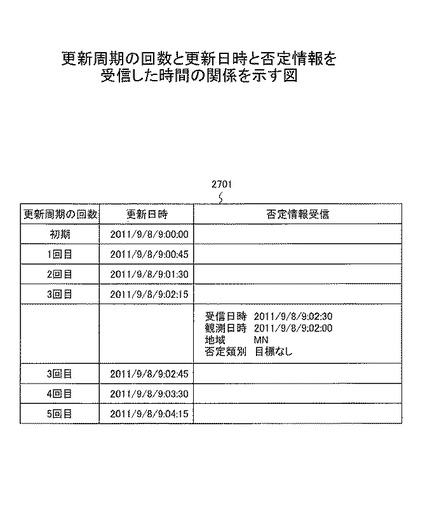
図26の表2701に示す目標存在情報の更新周期の回数を示す「更新周期の回数」に示されている「初期」(更新日時「2011/9/8/9:00:00」)〜「3回目」(更新日時「2011/9/8/9:02:15」)より後で否定情報を受信したとする。本例では、否定情報を受信日時2011/9/8/9:02:30に受信し、否定情報が有する観測日時には「2011/9/8/9:02:00」、地域には「MN」、否定類別には「目標なし」が含まれている。従って、観測日時に最も近い過去の更新日時は、「2回目」に対応する更新日時「2011/9/8/9:01:30となる。そして、現在の目標存在情報の「2回目」に対応する目標存在メッシュを識別する情報を抽出する。
【0090】
ステップS2602では、反映部305がステップS2601で抽出した目標存在メッシュのうち否定対象メッシュと一致するメッシュに目標物がないとし、否定情報を反映させる。図26の否定情報には否定類別に「なし」があるので、目標物(例えば、人、車両など)がないことになる。
【0091】
ステップS2603では、反映部305が否定情報の観測日時から現在日時に近くなるまで必要な更新周期の回数だけ、目標存在メッシュの更新を行う。観測日時+更新周期T×n<現在日時の条件を満たしている場合、n回だけ目標存在メッシュを更新する。必要な更新周期の回数だけ更新をした後は、更新周期45秒で更新を繰り返す。
n=0の場合は更新をしない。更新は、目標推定部303で説明した目標存在メッシュの更新と同様の処理である。
【0092】
図26の表2701の例では、否定情報の受信日時が「2011/9/8/9:02:30」であるので、現在日時を「2011/9/8/9:02:30」とする。また、否定情報の観測日時が「2011/9/8/9:02:00」であるので、n=0となり次の更新日時は「2011/9/8/9:02:45」(3回目)となる。
【0093】
受信日時(現在日時)が「2011/9/8/9:04:20」で、観測日時が「2011/9/8/9:02:00」で、更新周期が45秒である場合について説明する。現在日時が「2011/9/8/9:04:20」であるので、観測日時から現在日時を越えるまでに必要な更新周期の回数は3回になる。その結果、観測日時「2011/9/8/9:02:00」+更新周期「45秒」×3回=「2011/9/8/9:04:15」が求まる。つまり、更新周期は「5回目」となる(「2011/9/8/9:04:15」<現在日時「2011/9/8/9:04:20」)。更新を3回した後、更新周期45秒で更新を繰り返す。
【0094】
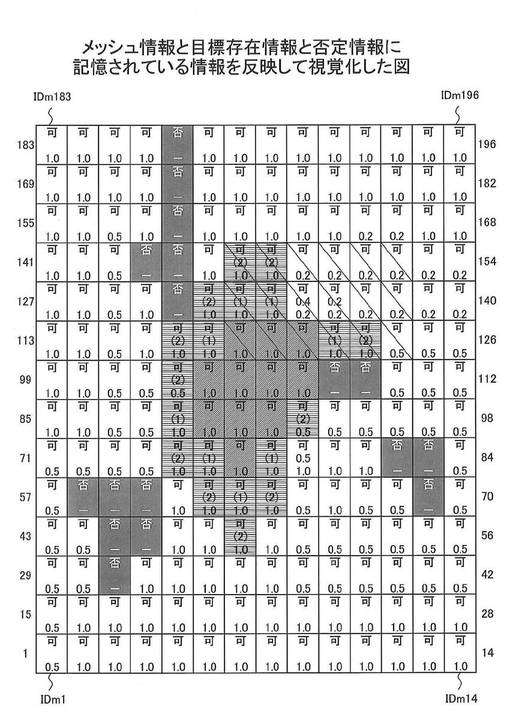
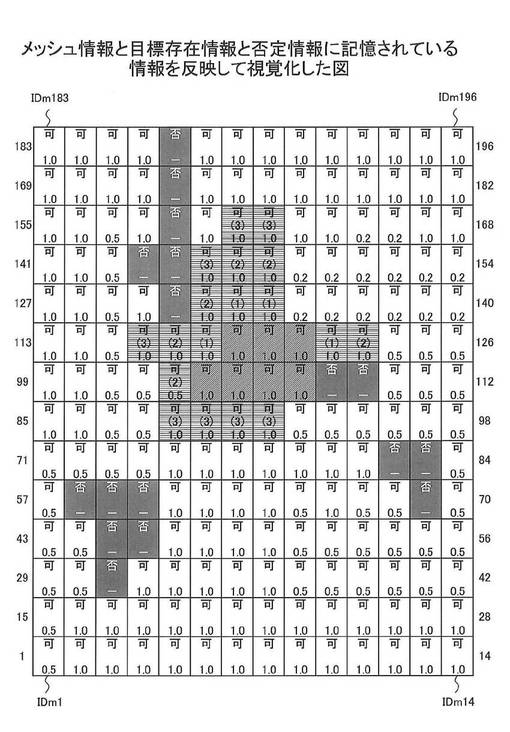
図27は否定情報を反映させた図で、目標物がないメッシュには左上から右下に斜め線がひかれている。本例では、IDm119〜IDm124、IDm133〜IDm138、IDm147〜IDm152が目標物がいないメッシュである。
【0095】
図28は2回目で否定情報を反映させた後の3回目の目標存在メッシュの状態を示す図である。否定情報が反映された目標物が存在する可能性があるメッシュIDm119〜IDm123、IDm133〜IDm136、IDm147、IDm148は、目標存在メッシュでなくなるとともに、更新回数と累積存在指数が初期値に戻る。そして、3回目で更新されメッシュIDm119〜IDm120、IDm133も目標存在メッシュになる。その後、5回目まで目標存在メッシュの更新を続ける。
【0096】
ステップS2604では、反映部305が目標物についてステップS2601〜S2603に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS2601(No)に移行する。
【0097】
図29〜図30を用いて、否定情報がある期間の継続的な情報である場合に行う反映処理について説明する。本例の否定情報には観測日時に観測期間(開始日時と終了日時)が記憶されている。
【0098】
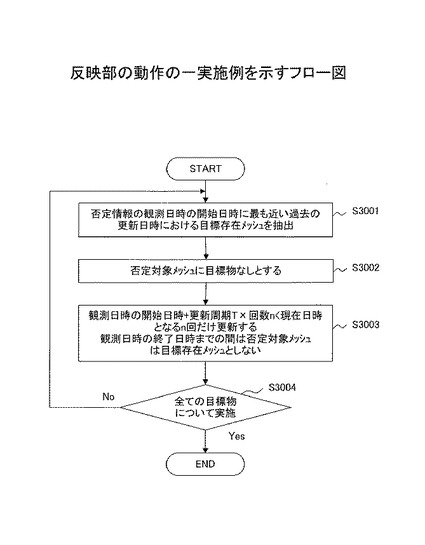
図29は、反映部305の動作の一実施例を示すフロー図である。
ステップS3001では、反映部305が否定情報の観測日時の開始日時に最も近い過去の更新日時における目標存在メッシュを抽出する。反映部305は、否定情報の観測日時を用いて、目標存在情報309に記憶されている目標物の更新周期の回数(「初期」「1」「2」・・・)を参照し、目標物において最も近い過去の更新日時に対応する目標存在メッシュを抽出する。
【0099】
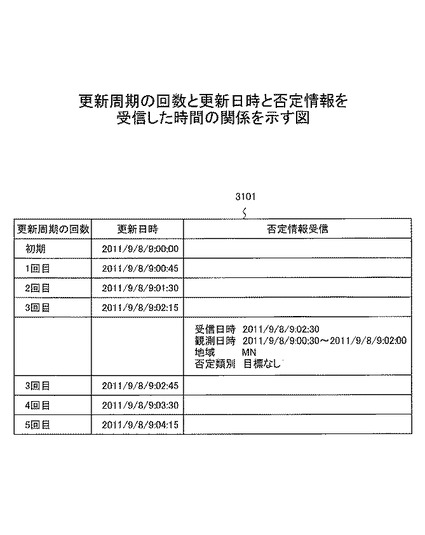
図30の表3101に示す目標存在情報の更新周期の回数を示す「更新周期の回数」に示されている「初期」(更新日時「2011/9/8/9:00:00」)〜「3回目」(更新日時「2011/9/8/9:02:15」)より後で否定情報を受信したとする。本例では、否定情報を受信日時2011/9/8/9:02:30に受信し、否定情報が有する観測日時には「2011/9/8/9:00:30」、地域には「MN」、否定類別には「目標なし」が含まれている。従って、観測日時の開始日時に最も近い過去の更新日時は、「初期」に対応する更新日時「2011/9/8/9:00:00となる。なお、「初期」でない場合には現在の目標存在情報の更新周期の回数に対応する目標存在メッシュを識別する情報を抽出する。
【0100】
ステップS3002では、反映部305がステップS3001で抽出した目標存在メッシュのうち否定対象メッシュと一致するメッシュに目標物がないとし、否定情報を反映させる。図30の否定情報には否定類別に「なし」があるので、目標物(例えば、人、車両など)がないことになる。
【0101】
ステップS3003では、反映部305が否定情報の観測日時から現在日時に近くなるまで必要な更新周期の回数だけ、目標存在メッシュの更新を行う。観測日時+更新周期T×n<現在日時の条件を満たしている場合、n回だけ目標存在メッシュを更新する。必要な更新周期の回数だけ更新をした後は、更新周期45秒で更新を繰り返す。
n=0の場合は更新をしない。更新は、目標推定部303で説明した目標存在メッシュの更新と同様の処理である。
【0102】
図31の表3101の例では、否定情報の受信日時が「2011/9/8/9:02:30」であるので、現在日時を「2011/9/8/9:02:30」とする。また、否定情報の観測日時が「2011/9/8/9:02:00」であるので、n=0となり次の更新日時の開始時刻は「2011/9/8/9:00:30」(1回目)となる。
【0103】
受信日時(現在日時)が「2011/9/8/9:02:30」で、観測日時の開始日時が「2011/9/8/9:00:30」で、更新周期が45秒である場合について説明する。現在日時が「2011/9/8/9:02:30」であるので、観測日時から現在日時を越えるまでに必要な更新周期の回数は3回になる。その結果、観測日時「2011/9/8/9:00:30」+更新周期「45秒」×3回=「2011/9/8/9:02:15」が求まる。つまり、更新周期は「3回目」となる(「2011/9/8/9:02:15」<現在日時「2011/9/8/9:02:30」)。更新を3回した後、更新周期45秒で更新を繰り返す。
【0104】
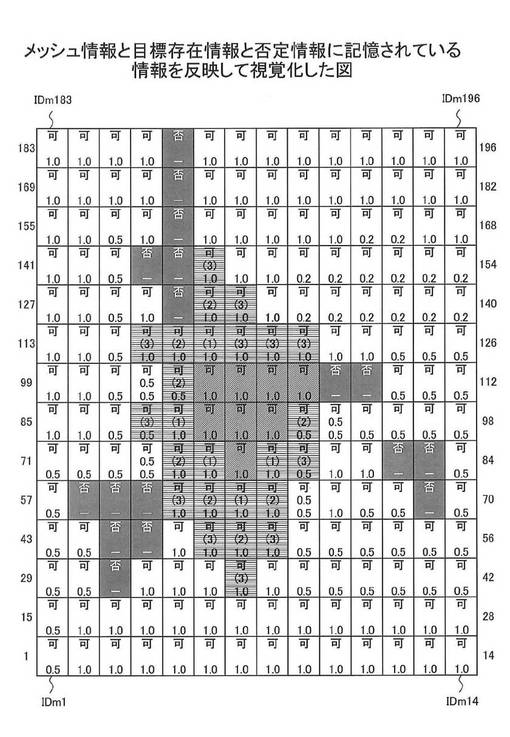
図31は否定情報を反映させた図で、目標物がないメッシュには左上から右下に斜め線がひかれている。本例では、IDm74〜IDm79、IDm88〜IDm93には目標物がいないメッシュである。観測日時の終了日時までの間は、否定対象メッシュを目標存在メッシュとしない。
【0105】
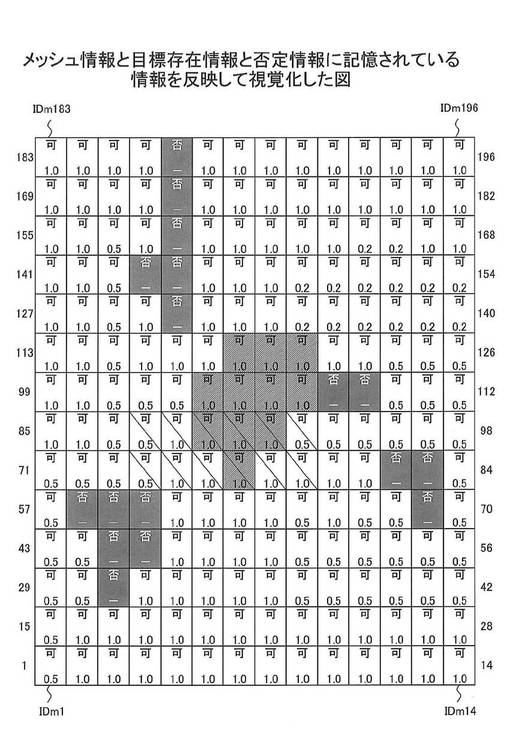
図32は2回目で否定情報を反映させた後の3回目の目標存在メッシュの状態を示す図である。否定情報が反映された目標物が存在する可能性があるメッシュIDm77、IDm90〜IDm92は、目標存在メッシュでなくなる。なお、更新回数と累積存在指数がある場合には、更新回数と累積存在指数は初期値に戻る。そして、3回目で目標存在メッシュと更新回数と累積存在指数を表示する。その後、5回目まで目標存在メッシュの更新を続ける。
【0106】
ステップS3005では、反映部305が目標物についてステップS3001〜S3004に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS3001(No)に移行する。ステップS3005からステップS3001に移行した場合には、ステップS3001で次の目標物IDを取得する。
【0107】
上記に示した実施形態では、センサによる探知情報や人の観測による情報を蓄積して目標物を継続的に管理する場合に、目標物がないことを示す否定情報を現在管理されている目標物の目標存在情報に反映させる。その結果、目標物が存在する可能性のある区域を絞り込むことができるため、目標物が存在する可能性のある区域を精度よく推定できる。
【0108】
また、目標物が移動可能な領域を精度よく推定できるため、センサなどの目標物の監視すべき区域が明確になるため、目標物の監視すべき区域を決定することが容易にできる。
また、本来は移動してしまった目標物がその位置に残って消せない、ノイズによって誤探知してしまった目標が残ってしまい消せないなどの、古い不要な情報が残存していたが、否定情報を反映させることで古い不要な情報の残存することを抑止できる。不要な情報の抑止により、現在の目標物の所在の特定が精度よく推定できる。
【0109】
また、本発明は、上記実施の形態に限定されるものでなく、本発明の要旨を逸脱しない範囲内で種々の改良、変更が可能である。
【符号の説明】
【0110】
1 目標物管理装置
2 センサ部
3 受信部
4 通信部
5 制御部
6 記憶部
7 入出力部
200 監視対象範囲
201、902 メッシュ
203、204、205、206、207、208 センサ
209、210 山
211、212、213、214、215 覆域
216 監視領域
301 メッシュ管理部
302 速度管理部
303 目標推定部
304 同一化部
305 反映部
306 地図情報
307、901 メッシュ情報
308、1101 速度情報
309、1301 目標存在情報
401 センサ
402 センサ部
403 制御部
404 記憶部
405 入出力部
406 通信部
601 センサ情報
602 探知情報
701 否定情報
1001 移動時間係数情報
1002 係数補正情報
1501 更新日時情報
IDm1〜IDm196 メッシュ
【技術分野】
【0001】
本発明は、各種センサが探知した目標物の情報を管理する目標物管理装置および目標物管理方法に関する。
【背景技術】
【0002】
従来、センサを用いて目標物を探知して、探知した目標物ごとの情報を取得して、目標物を管理する装置が知られている。目標物の情報の管理は、前回探知した目標物の位置、速度、種別(車両、人など)の情報と、今回探知した目標物の位置、速度、種別の情報との類似性を判定して、前回探知した目標物と今回探知した目標物との関連付けをして管理をしている。複数のセンサを用いる場合、各センサが探知した目標物それぞれの位置、速度、種別の類似性を比較し、その結果を用いて目標物に対応する情報を管理している。
【0003】
また、複数のセンサを用いて監視対象の領域内の目標物を管理する場合、各センサが探知した目標物それぞれの位置、速度、種別の類似性を判定して、比較した結果を用いて目標物に対応する情報を管理している。
【0004】
関連する技術として、災害現場からの観測データに基づいて模擬規則を決定し、被災範囲予測を行う災害監視装置が開示されている。その災害監視装置によれば、災害現場から観測データを取得し、観測データを基に災害状況を簡略化して表す現状データを生成し、現状データに基づいて推定規則を生成する。また、現状データに基づき、生成された推定規則を用いて被災範囲予測を行うものである。
【0005】
また、関連する技術として、侵入者が現在どこまで侵入しているか予測し、表示することにより、侵入者捕捉に役立てるようにした侵入監視システムが開示されている。この侵入監視システムによれば、監視区域内のそれぞれの所定の位置に設けられた複数の侵入検知センサと、侵入検知センサからの検知信号に基づき侵入発生時からの経過時間に応じて侵入可能な範囲を予測する。そして、この予測に応じて侵入可能な範囲を表示するものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−295633号公報
【特許文献2】特開2004−171279号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の態様のひとつである目標物管理装置は、メッシュ管理部、目標推定部、同一化部、反映部を有している。
メッシュ管理部は、監視対象範囲を一定の区域からなるメッシュに区切り、管理する。
【0009】
目標推定部は、探知した目標物の情報を有する探知情報を用いて、上記目標物の存在するメッシュを決定し、時間経過に応じて上記目標物の存在する目標存在メッシュを推定する。
【0010】
同一化判定部は、上記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、上記目標存在メッシュを更新する。
反映部は、目標物がない地域を示す否定情報を受信すると、上記地域に対応する目標物がないメッシュを上記目標存在メッシュに反映し、反映した目標存在メッシュを更新する。
【発明の効果】
【0011】
本実施の形態によれば、目標物が存在する可能性のある区域を精度よく推定できるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】目標物管理装置の一実施例を示す図である。
【図2】目標物管理装置が監視する監視対象範囲の一実施例を示す図である。
【図3】目標物管理装置の制御部の一実施例を示す図である。
【図4】センサの一実施例を示す図である。
【図5】センサの制御部の動作の一実施例を示すフロー図である。
【図6】センサ情報と探知情報のデータ構造の一実施例を示す図である。
【図7】否定情報のデータ構造の一実施例を示す図である。
【図8】メッシュ管理部の動作の一実施例を示すフロー図である。
【図9】メッシュ情報のデータ構造とメッシュの一実施例を示すフロー図である。
【図10】移動時間係数情報と係数補正情報のデータ構造の一実施例を示す図である。
【図11】速度情報のデータ構造の一実施例を示す図である。
【図12】目標推定部の動作の一実施例を示すフロー図である。
【図13】目標存在情報のデータ構造の一実施例を示す図である。
【図14】更新周期の求め方の一実施例を示すフロー図である。
【図15】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図16】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図17】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図18】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図19】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図20】メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。
【図21】同一化部の動作の一実施例を示すフロー図である。
【図22】同一化部の同一化処理の動作の一実施例を示すフロー図である。
【図23】2つの目標物各々に対応する目標存在情報に記憶されている目標存在メッシュを示す図である。
【図24】反映部の動作の一実施例を示すフロー図である。
【図25】反映部の動作の一実施例を示すフロー図である。
【図26】更新周期の回数と更新日時と否定情報を受信した時間の関係を示す図である。
【図27】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図28】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図29】反映部の動作の一実施例を示すフロー図である。
【図30】更新周期の回数と更新日時と否定情報を受信した時間の関係を示す図である。
【図31】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【図32】メッシュ情報と目標存在情報と否定情報に記憶されている情報を反映して視覚化した図である。
【発明を実施するための形態】
【0013】
本実施形態では、センサによる探知情報や人の観測による情報を蓄積して目標物を継続的に管理する場合に、目標物がないことを示す否定情報を現在管理されている目標物の情報に反映させる。その結果、目標物が存在する可能性のある区域を絞り込むことができるため、目標物が存在する可能性のある区域を精度よく推定できる。
【0014】
また、目標物が移動可能な領域を精度よく推定できるため、センサなどの目標物の監視すべき区域が明確になるため、目標物の監視すべき区域を決定することが容易にできる。
また、本来は移動してしまった目標物がその位置に残って消せない、ノイズによって誤探知してしまった目標物が残ってしまい消せないなどの、古い不要な情報が残存していたが、否定情報を反映させることで古い不要な情報の残存することを抑止できる。不要な情報の抑止により、現在の目標物の所在の特定が精度よく推定できる。
【0015】
以下図面に基づいて、本発明の実施形態について詳細を説明する。
目標物管理装置について説明する。
図1は、目標物管理装置の一実施例を示す図である。目標物管理装置1は、センサが探知した情報に基づいて目標物を管理する装置で、センサ部2、受信部3、通信部4、制御部5、記憶部6、入出力部7を備えている。目標物管理装置1は、例えば図2に示される監視対象範囲200に所在する目標物を探知した情報を、センサ203、204、205、206、207、208各々から取得して目標物を管理する。
【0016】
図2は、目標物管理装置が監視する監視対象範囲の一実施例を示す図である。監視対象範囲200は、目標物管理装置が目標物を監視する対象範囲であり、入出力部7などから入力される対象範囲を設定するデータを用いて決定される。また、監視対象範囲は予め設定される区域で分割した区域を複数有している。以降、監視対象範囲を分割した区域をメッシュと呼ぶ。メッシュは、図2では監視対象範囲200を複数の範囲に分割したメッシュ201として示している。本例では、メッシュ201は正方形状の範囲で表されている。また、メッシュ201の間隔は、想定する目標物によって異なるが、10m〜1000m程度を想定する。ただし、メッシュ形状、メッシュ間隔は上記に限定されるものではない。
【0017】
次に、図2の例ではセンサ203、204、205、206、207は、地上に配置されたセンサを示している。センサ208は航空機に設置されたセンサを示している。また、センサ203の監視領域を覆域211、センサ204の監視領域を覆域212、センサ205の監視領域を覆域213、センサ206の監視領域を覆域214、センサ207の監視領域を覆域215、センサ208の監視領域を監視領域216として示している。また、図2の監視対象範囲200には標高の高い地形(例えば、山)が所在し、この地形を山209、210として表している。
【0018】
図1のセンサ部2は、目標物管理装置1に設けられたセンサである。目標物管理装置1の本体にセンサ機能を設けてもよい。ただし、センサ部2を目標物管理装置1にかならずしも設けなくてもよい。
【0019】
受信部3は、各センサからセンサ情報、各センサが探知した結果を有する探知情報、各センサの覆域に目標物がないことを示す否定情報などを受信し、受信した探知情報を制御部5に転送する。センサ情報は、例えば、センサの識別子、位置、向きなどのデータを有している。探知情報は、探知した目標物の情報を有し探知した目標物を識別する識別子、目標物を観測した日時、目標物の位置、目標物の類別(人、車両など)などのデータを含んでいる。否定情報は、例えば、目標物を観測した日時、観測者の位置、観測手段、観測方位、存在しない目標物の類別、観測地域などのデータを含んでいる。センサ情報と探知情報と否定情報については後述する。
【0020】
通信部4は送信部と受信部を備えている。送信部は、例えば無線送信部、有線送信部を備え、受信部は無線受信部、有線受信部を備えている。無線送信部、無線受信部は、無線Local Area Network(LAN)、携帯電話、Personal Handyphone System(PHS)などの無線通信機である。また、有線送信部、有線受信部は、専用回線、公衆回線、LANを介してパーソナルコンピュータなどと通信ができる。
【0021】
制御部5は、図3に示すようにメッシュ管理部301、速度管理部302、目標推定部303、同一化部304、反映部305などを備えている。図3は、目標物管理装置の制御部の一実施例を示す図である。制御部5は、Central Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いてもよい。
【0022】
メッシュ管理部301は、記憶部6に記憶されている地図情報を用いて、メッシュ情報を生成する。すなわち、監視対象範囲を一定の区域に区切り複数のメッシュを生成し、メッシュの位置を示す基準座標と、メッシュの幅と、移動可否と、移動時間係数と、を関連付ける。移動可否は、メッシュに目標物が移動できるか否かを示す。移動時間係数は、メッシュに対応する区域の状況に応じて目標物がメッシュを移動するのに要する時間を決定するために用いる係数である。監視対象範囲を一定の区域に区切ったメッシュごとに目標物の移動可否や後述する移動可能時間に関する係数を管理する。地図情報は、例えば、カーナビゲーションシステムで使用する地図情報などを用いることが考えられる。メッシュ情報については後述する。
【0023】
速度管理部302は、目標物の類別(例えば、人、車両など)と、類別ごとに予め決められた移動速度とを関連付けて速度情報を生成し、記憶部6に記憶する。
目標推定部303は、探知された目標物により決まる移動速度とメッシュの幅とを用いて、探知された目標物がメッシュ間を移動可能な更新周期を求める。続いて、更新周期ごとに探知された目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとする。続いて、探知された目標物と、目標物の類別と、更新周期の回数と、更新周期ごとに求めた目標存在メッシュと、を関連付けて目標存在情報に記憶する。
【0024】
また、目標推定部303は目標物の類別により決まる移動速度を用いて更新周期を変更する。
同一化部304は、観測日時と、探知した目標物の位置と、目標物の類別を有する探知情報を受信する。観測日時または直前の目標存在情報の更新周期の回数に対応する更新日時で、探知した目標物の位置が目標存在メッシュに含まれ、目標物の類別が目標存在情報の類別と同一である目標存在情報に記憶されている目標物を検出する。その後、検出した目標物が複数ある場合には目標存在メッシュの合計が小さい目標物を選択し、探知した目標物に関連付け、更新日時から現在の日時までに含まれる更新周期の回数の目標存在メッシュを求め、目標存在情報に記憶する。
【0025】
反映部305は、観測日時と、目標物が存在しない地域とを有する否定情報を受信すると、観測日時または直前の目標存在情報の更新周期の回数に対応する更新日時に関連付けられている目標存在メッシュを抽出する。続いて、目標物が存在しない地域が示すメッシュと一致する抽出した目標存在メッシュを目標物が存在しないメッシュにし、更新日時から現在の日時までに含まれる更新周期の回数の目標存在メッシュを求め、目標存在情報に記憶する。
【0026】
また、反映部は観測日時に観測を開始した開始日時と終了した終了日時を有する否定情報を受信すると、開始日時から終了日時の期間、否定情報が有する目標物が存在しない地域に目標存在メッシュがないとして目標存在メッシュを求める。
【0027】
上記のように、目標推定部303は目標物のメッシュ間を移動可能周期毎に、目標物の存在が推定されるメッシュに隣接するメッシュを求める。また、同一化部304は該目標物と新たに探知した目標物との同一化し、反映部305は目標物の不存在メッシュの特定をし、目標存在メッシュを求める。
【0028】
記憶部6は、プログラム、テーブル、データなどが記録されている。記憶部6は、地図情報、メッシュ情報、速度情報、目標存在情報、更新日時情報などが記憶されている。また、記憶部6は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)などのメモリやハードディスクなどである。また、記憶部6はパラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。また、記憶部6には制御部5により演算される結果が記録される。
【0029】
入出力部7は入力部と出力部を有している。入出力部7の入力部は、目標物管理装置1の各種設定を入力する。例えば、監視対象範囲などを入力する。また、入出力部7の出力部がディスプレイであれば、入力部としてディスプレイに設けられたタッチパネルなどが考えられる。また、キーボード、マウスなどが考えられる。なお、ディスプレイは、例えば、液晶ディスプレイ、Cathode Ray Tube(CRT)などが考えられる。出力部は、例えば、ディスプレイ、プリンタなどである。出力部は、制御部5の演算結果などを表示する。
【0030】
センサについて説明する。
図4は、センサの一実施例を示す図である。図4に示すセンサ401(例えば、図2の203、204、205、206、207、208)は、センサ部402、制御部403、記憶部404、入出力部405、通信部406を備えている。
【0031】
センサ部402は、目標物を探知するためのレーダ装置、暗視装置、測距装置、撮影装置などである。例えば、カメラ、ビデオカメラなどを含む。レーダ装置は自らの送信部から電波を照射し、目標物から反射されて戻ってくる電波を受信機で受信することにより、目標物の距離、方向、移動速度、種別などの情報を得る装置である。例えば、センサとしてドップラレーダ(Doppler radar)装置などを用いることが好ましい。また、陸上において、目標物は人、一般車両、特殊車両、軍用車両など、海上においては人、旅客船(客船)、貨客船(貨客混載船)、貨物船、軍艦、巡視船、漁船、特殊船などを対象とし、さらに航空機(重航空機、軽航空機)などを対象としてもよい。
【0032】
また、地上の目標物を監視するセンサは、地上に設置したドップラレーダ装置の他に、飛行機(無人飛行機などを含む)やヘリコプタによる空中から撮影した動画像や静止画像により目標物を探知してもよい。なお、動画像や静止画像は、暗視装置、撮影装置などで撮影した情報であり、後述する地図データと撮影した情報を対応付けて記録してもよいし、また撮影した情報を解析して目標物を検知して記録してもよい。
【0033】
制御部403は、センサ401の各部の制御を行うとともに、センサ部402が観測した結果を取得して目標物管理装置1にセンサ情報、探知情報、否定情報などを送信する。制御部403は、Central Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いてもよい。
【0034】
記憶部404は、プログラム、テーブル、データなどが記録されている。また、記憶部404は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)などのメモリやハードディスクなどである。また、記憶部404はパラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。また、記憶部404には制御部403により演算される結果が記録される。
【0035】
入出力部405は、入力部と出力部を有している。入出力部405の入力部は、センサ401の各種設定を入力する。入出力部405の出力部がディスプレイであれば、入力部としてディスプレイに設けられたタッチパネルなどが考えられる。また、キーボード、マウスなどが考えられる。なお、ディスプレイは、例えば、液晶ディスプレイ、Cathode Ray Tube(CRT)などが考えられる。出力部は、例えば、ディスプレイ、プリンタなどである。
【0036】
通信部406は送信部と受信部を備えている。送信部は、例えば無線送信部、有線送信部を備え、受信部は無線受信部、有線受信部を備えている。無線送信部、無線受信部は、無線Local Area Network(LAN)、携帯電話、Personal Handyphone System(PHS)などの無線通信機である。また、有線送信部、有線受信部は、専用回線、公衆回線、LANを介して目標物管理装置1と通信ができる。
【0037】
センサの動作について説明する。
図5は、センサの制御部の動作の一実施例を示すフロー図である。ステップS501では、制御部403がセンサ部402から観測した結果を取得する。
【0038】
ステップS502では、制御部403が観測した結果を用いて監視範囲に目標物が存在するか否かを判定し、目標物が存在する場合にはステップS503(Yes)に移行し、目標物が存在しない場合にはステップS505(No)に移行する。
【0039】
ステップS503では制御部403が観測した結果を用いて探知情報を生成する。ステップS504では制御部403が探知情報を目標物管理装置1に送信する。また、目標物管理装置1にセンサ情報が記憶されていない場合には、センサ情報を目標物管理装置1に送信してもよい。
【0040】
図6は、センサ情報と探知情報のデータ構造の一実施例を示す図である。センサ情報601は、「センサID」「送信日時」「位置」「向き」「角度」などに記憶する情報を有している。「センサID」は、センサを識別する識別子が記録され、本例では図2のセンサ203から送信されるセンサ情報であるので「203」が記録されている。「送信日時」は、センサがセンサ情報と探知情報を目標物管理装置に送信した日時が記録されている。本例では、センサ203がセンサ情報と探知情報を送信した日時として2011年10月8日午前9時1分を表す「2011/10/8/9:01」が記録されている。「位置座標」には、センサの配置されている位置(例えば、緯度、経度など)が記録されている。本例では、緯度、経度を表す「EXX0,NXX0」が記録されている。「向き」には、センサが配置されている向きが記録されている。本例では、センサの向きなどを表す「muki」が記録されている。「角度」には、センサが監視する角度などが記録されている。本例では、角度を表す「kakudo」が記録されている。なお、本例ではセンサ情報に「向き」「角度」が含まれているが、含まなくてもよい。
【0041】
探知情報602は、「目標物ID」「観測日時」「位置座標」「類別」などに記憶する情報を有している。「目標物ID」は、目標物を識別する識別子が記録されている。本例では、識別子として「ID1」「ID2」・・・「IDn」が記録されている。「観測日時」には、目標物を検知した日時が記録されている。本例では、センサ203が目標物ID1、ID2〜IDnを検知した日時として2011年10月8日午前9時を表す「2011/10/8/9:00」が記録されている。「位置座標」には、センサが探知した目標物の位置座標が記録されている。本例では、センサ203の探知した目標物ID1、ID2〜IDnまでの存在する位置座標を表す「EXX1,NXX1」「EXX2,NXX2」・・・「EXXn,NXXn」が記録されている。なお、「位置座標」としてセンサから目標物までの距離と方位を用いてもよい。「類別」には、目標物の類別を示す情報が記憶されている。本例では、人、車両などを示す「人」「車両」が考えられる。なお、本例では「目標物ID」「観測日時」「位置座標」「類別」を示したが、探知情報には目標物の移動速度などを含めてもよい。
【0042】
ステップS505では制御部403が否定情報を生成する。ステップS506では制御部403が否定情報を目標物管理装置1に送信する。また、目標物管理装置1にセンサ情報が記憶されていない場合には、センサ情報を目標物管理装置1に送信してもよい。
【0043】
図7は、否定情報のデータ構造の一実施例を示す図である。否定情報701は、「観測日時」「観測位置座標」「観測手段」「観測方位」「否定類別」「観測地域」などに記憶する情報を有している。「観測日時」は、目視またはセンサにより目標物を観測した日時または観測した期間が記録されている。本例では、目視により観測をした日時として2011年10月8日午前10時を表す「2011/10/8/10:00」が記録されている。なお、観測した期間を記憶する場合に、例えば、2011年10月8日午前10時〜11時までの間であれば「2011/10/8/10:00〜2011/10/8/11:00」を記憶することが考えられる。「観測位置座標」には、センサの配置されている位置(例えば、緯度、経度など)が記録されている。本例では、緯度、経度を表す「EXXm,NXXm」が記録されている。「観測位置座標」には、人が目視により目標物を観測する場合には観測者の位置座標、またセンサが観測する場合にはセンサの位置座標が記録されている。本例では、観測者が目標物を観測した位置座標を表す「EXXm,NXXm」が記録されている。「観測手段」には、目標物を観測する手段が記憶されている。本例では、目標物を観測する手段を表す情報として「目視」「レーダ」などが記憶されている。「観測方位」には、目視またはセンサにより目標物を観測する方位が記憶されている。本例では、目標物を観測する方位を表す情報として「houi」などが記憶されている。「houi」には、例えば、目標物を観測できる方位として角度0°以上〜360°未満を示す情報を記憶することが考えられる。または、全方位を観測可能な場合には全方位を示す情報を記憶してもよい。「否定類別」には、目視またはセンサにより目標物を観測した結果として観測している範囲に目標物がないことを示す情報が記憶される。本例では、観測している範囲に目標物がないことを示す「なし」が記憶されている。なお、観測している範囲に人がいるが車両がいない場合には、車両がいないことを示すことを示す情報を記憶してもよい。例えば、「車両なし」。また、観測している範囲に人がいないが車両がいる場合には、人がいないことを示すことを示す情報を記憶してもよい。例えば、「人なし」。ただし、人と車両に限定されるものではない。「観測地域」には、観測者が観測している範囲に対応付けられている地域の名称などが記憶されている。本例では、地域を示す情報として「MN」が記憶されている。
【0044】
目標物管理装置の動作について説明する。
目標物管理装置1のメッシュ情報の生成について図8を用いて説明する。図8は、メッシュ管理部の動作の一実施例を示すフロー図である。ステップS801では、メッシュ管理部301が地図情報を取得し、地図情報の監視対称範囲に対応する場所に決められたメッシュを設定する。ステップS802では、メッシュ管理部301がステップS801で設定したメッシュ各々に地域名を関連付ける。ステップS803では、メッシュ管理部301がメッシュ各々に対応付けられている地域において、目標物が移動できる時間を相対的に示す移動時間係数を設定する。ステップS801〜S803の処理によりメッシュ情報が生成される。図9は、メッシュ情報のデータ構造とメッシュの一実施例を示すフロー図である。図9のメッシュ情報901は、「メッシュID」「基準座標」「幅」「土地利用区分」「地表面土壌」「標高」「類別1移動可否」「類別2移動可否」「類別1移動時間係数」「類別2移動時間係数」「地域」などに記憶する情報を有している。「メッシュID」には、メッシュを識別する情報が記憶されている。本例では、メッシュを識別する情報として「IDm1」「IDm2」・・・・が記憶されている。「基準座標」には、メッシュの位置を特定するための基準となる位置座標(基準座標)が記憶されている。本例では、基準座標を示す情報として「EXXb,NXXb」が記憶されている。「幅」には、メッシュの基準座標からの距離を示す情報が記憶されている。本例では、図9に示す正方形のメッシュ902の幅を示す情報「100」が記憶されている。ただし、メッシュの形状は正方形でなくてもよく、正方形以外の場合には幅だけでなくメッシュの面積を特定できる情報を記憶することが考えられる。「土地利用区分」には、メッシュが割り振られている地域がどのような地域であるかを示す情報が記憶されている。例えば、建物密集地、田畑、森林、荒地などを識別する情報が記憶される。本例では、「建物密集地」が記憶されている。「地表面土壌」には、メッシュが割り振られている地域がどのような地表面土壌であるかを示す情報が記憶されている。例えば、砂、土、アスファルトなどを識別する情報が記憶される。本例では、「アスファルト」が記憶されている。「標高」には、メッシュが割り振られている地域の標高が記憶されている。本例では、標高10mを示す「10」が記憶されている。「類別1移動可否」「類別2移動可否」には、メッシュを移動できるか否かを示す情報が記憶されている。本例では、類別1として人が移動できることを示す情報として「可」が示され、類別2として車両が移動できることを示す情報として「可」が示されている。
【0045】
「類別1移動時間係数」「類別2移動時間係数」には、メッシュを移動する時間に関する係数が記憶されている。移動時間係数は、メッシュに対応する監視対象領域の状況に応じて決まる係数で、例えば、土地利用区分や地表面土壌を用いて求められる。図10は、移動時間係数情報と係数補正情報のデータ構造の一実施例を示す図である。図10に示す移動時間係数情報1001は、「土地利用区分」「類別1移動時間係数」「類別2移動時間係数」に記憶される情報を有している。「土地利用区分」には、「建物密集地」「田畑」「森林」「荒地」などを示す情報が記憶されている。「類別1移動時間係数」「類別2移動時間係数」には、例えば、予め決められた移動時間係数が「土地利用区分」に記憶されているそれぞれの情報に関連付けて設定される。本例では、「類別1移動時間係数」には、「建物密集地」に対応する「1.0」、「田畑」に対応する「0.9」、「森林」に対応する「0.8」、「荒地」に対応する「0.7」が記憶されている。また、「類別2移動時間係数」には、「建物密集地」に対応する「1.0」、「田畑」に対応する「0.8」、「森林」に対応する「0.7」、「荒地」に対応する「0.7」が記憶されている。「1.0」は、人や車両が通常の速度で移動できることを示している。移動時間係数は1.0より小さくなるに従って移動が困難になることを示している。図10に示す係数補正情報1002は、「地表面土壌」「類別1補正係数」「類別2補正係数」に記憶される情報を有している。「地表面土壌」には、「砂」「土」「アスファルト」などを示す情報が記憶されている。「類別1補正係数」「類別2補正係数」には、例えば、予め決められた補正係数が「地表面土壌」に記憶されているそれぞれの情報に関連付けて設定される。本例では、「類別1補正係数」には、「砂」に対応する「0.8」、「土」に対応する「0.9」、「アスファルト」に対応する「1.0」が記憶されている。また、「類別2補正係数」には、「砂」に対応する「0.8」、「土」に対応する「0.9」、「アスファルト」に対応する「1.0」が記憶されている。なお、係数補正情報は用いなくてもよい。
【0046】
「地域」には、メッシュが設定されている地域の名称や道路などに関連する情報が記憶されている。本例では、地域を示す情報「MN」が記憶されている。なお、人からの否定情報が地名で通知されることを考慮して、該当メッシュに対応し地名を対応地名として管理することが考えられる。地域は地図情報を参照して求めることが望ましい。
【0047】
目標物管理装置1による速度情報の生成について説明する。
例えば、類別された目標物に対応する速度を利用者が入力し、該入力を用いて速度管理部302は図11に示すような速度情報を生成する。図11は、速度情報のデータ構造の一実施例を示す図である。図11の速度情報は、「類別」「速度」に記憶される情報を有する。「類別」には目標物を類別した情報が記憶される。例えば、人や車両などが考えられる。本例では、「類別1」「類別2」・・・・が記憶されている。「速度」には類別された目標物の移動速度を示す情報が記憶される。例えば、人や車両などの移動速度が考えられる。本例では、「類別1」に関連付けて「4km/h」が記憶されている。また、「類別2」に関連付けて「40km/h」が記憶されている。
【0048】
目標物管理装置1の目標推定部、同一化部、反映部について説明する。
図12は、目標推定部の動作の一実施例を示すフロー図である。
ステップS1201では、目標推定部303が目標存在情報309に記憶されている目標物IDを取得する。目標存在情報309について説明する。図13は、目標存在情報のデータ構造の一実施例を示す図である。図13の目標存在情報1301は、「目標物ID」「基準座標」「類別」「目標存在メッシュ」「累積存在指数」「更新日時」・・・・に記憶される情報を有している。「目標物ID」には、目標物を識別する情報が記憶されている。本例では、目標物を識別する情報「ID1」「ID2」・・・・が記憶されている。なお、目標物IDは目標物が新たに探知されると追加される。「基準座標」には、「目標物ID」に対応する目標物が探知された位置の座標を示す情報が記憶されている。本例では、目標物が探知された位置の座標を示す情報「EXXp,NXXp」が「ID1」に関連付けられて記憶されている。なお、新たな目標物が探知されと新たな目標物に関連する基準座標が追加される。「類別」には、「目標物ID」に対応する目標物の類別を示す情報が記憶されている。本例では、目標物の類別を示す情報「人」が「ID1」に関連付けられて記憶されている。なお、新たな目標物が探知されると新たな目標物に関連する類別が追加される。
【0049】
「目標存在メッシュ」には、後述する更新周期ごとに目標物が移動して存在すると推定される目標物存在メッシュを識別する情報が記憶されている。本例では、「目標物ID」に関連付けられている更新周期の回数を示す「初期」「1回目」「2回目」「3回目」・・・・に関連付けられてメッシュIDが記憶されている。「初期」には目標存在メッシュ「IDm76,90−92,104−107,119−121」が記憶されている。「1回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」が記憶されている。「2回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148」が記憶されている。「3回目」には目標存在メッシュ「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162」が記憶されている。
【0050】
「累積存在指数」には、目標物が移動可能であるがまだ隣接するメッシュに存在していないと推定される場合に、更新周期の回数ごとに累積存在指数を求めてその推定される隣接するメッシュに記憶されている。本例では、「目標物ID」に関連付けられている更新周期の回数を示す「初期」「1回目」「2回目」「3回目」・・・・に関連付けられてメッシュとそのメッシュに対応するが累積存在指数が記憶されている。「初期」にはメッシュとそのメッシュに対応するが累積存在指数がないことを示す「−」が記憶されている。「1回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm135=0.2,IDm93=0.5」が記憶されている。「2回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm135=0.4,IDm136=0.2,IDm78=0.5」が記憶されている。「3回目」にはメッシュとそのメッシュに対応するが累積存在指数「IDm149=0.2,IDm135=0.6,IDm136=0.4,IDm137=0.2,IDm94=0.5,IDm65=0.5,IDm102=0.5,IDm73=0.5」が記憶されている。
【0051】
「更新日時」には更新するごとに日時が記憶されている。本例では、2011年9月8日9時から更新を45秒ごとすることを示す更新日時が示されている。「初期」には「2011/9/8/9:00:00」、「1回目」には「2011/9/8/9:00:45」、「2回目」には「2011/9/8/9:01:30」、「3回目」には「2011/9/8/9:02:15」、「4回目」には「2011/9/8/9:03:00」、「5回目」には「2011/9/8/9:03:45」・・・・が記憶されている。 図14に示すフローを用い更新周期の求め方について説明する。
【0052】
図14は、更新周期の求め方の一実施例を示すフロー図である。ステップS1401では、目標推定部303が目標物の類別と速度から目標物の移動速度を求める。例えば、探知した目標物を用いて、速度情報308を参照し、移動速度を求める。図11の速度情報1101の場合に探知した目標物の類別が類別1であれば4km/hを移動速度とする。また、探知した目標物の類別が類別2であれば40km/hを移動速度とする。
【0053】
ステップS1402では、目標推定部303がメッシュ内を目標物が移動する時間(更新周期)を算出する。例えば、探知した目標物が存在するメッシュの幅をメッシュ情報307から取得し、取得した幅とステップS1401で求めた移動速度を用いて、更新周期を求める。メッシュの幅が50mで、移動速度が4km/hの場合の更新周期Tは、50m/4km×3600秒=45秒となる。
なお、更新周期は上記方法により求めてもよいし、利用者が変更してもよい。
【0054】
ステップS1403では、目標推定部303がステップS1402で求めたメッシュを移動する時間(更新周期T)を目標存在情報に記憶する。
【0055】
ステップS1202では、目標推定部303が目標存在情報309を参照して前回の目標存在メッシュに隣接するメッシュを抽出する。図13の目標存在情報1301の場合において、現在の更新周期の回数が2回目になった場合、1回目に関連付けられて記憶されている目標物ID1の目標存在メッシュを抽出する。目標存在メッシュは「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」である。なお、更新周期の回数が2回目のときは目標存在情報1301には2回目以降の目標存在メッシュは記憶されていない。
【0056】
ステップS1203では、目標推定部303がメッシュ情報307の類別移動可否を示す情報を参照して、移動ができないことを示す情報「否」がある場合には監視対象範囲からそのメッシュを除外する。すなわち、目標物が移動できないメッシュには目標物が存在しないと推定する。図9のメッシュIDm1の場合、「類別1移動可否(人)」が「可」であり、「類別2移動可否(車両)」が「可」であるので、人または車両が移動できるメッシュである。「類別1移動可否(人)」が「否」であり、「類別2移動可否(車両)」が「否」が記憶されていれば人または車両が移動できないメッシュとなる。
【0057】
ステップS1204では、目標推定部303が前回抽出されたメッシュと隣接するメッシュにそれぞれに対応するメッシュ情報307の標高を示す情報を取得する。続いて、前回抽出されたメッシュと隣接するメッシュの標高差を求め、その標高差が閾値Hより大きいか否かを判定する。標高差が閾値Hより大きいとき(標高差>閾値H)監視対象範囲からそのメッシュを除外する。すなわち、隣接するメッシュとの標高差が大きいため目標物が隣接するメッシュに移動できないとして、隣接するメッシュには目標物が存在しないと推定する。
【0058】
図15〜図20は、メッシュ情報と目標存在情報に記憶されている情報を反映して視覚化した図である。図15〜図20にはステップS1203にて除外するメッシュに「否」が示されている。なお、ステップS1204にて除外するメッシュは接する方向により異なるので、ここでは標高差による除外はないという例を示している。
【0059】
ステップS1205では、目標推定部303がメッシュ情報307の移動時間係数を示す情報を参照し、移動時間係数が1であるか否かを判定し、移動時間係数=1であればステップS1208(Yes)に移行する。移動時間係数≠1であればステップS1206(No)に移行する。すなわち、移動時間係数が1であれが更新周期内に隣接するメッシュに移動できると推定し、移動時間係数が1より小さい場合には更新周期内に隣接するメッシュに移動できない可能性があると判定する。図9のメッシュIDm1の場合、「類別1移動時間係数」が「1.0」であり、「類別2移動時間係数」が「1.0」であるので、人または車両が更新周期内に隣接するメッシュに移動できると推定できる。
【0060】
ステップS1206では、目標推定部303が累積存在指数を求める。累積存在指数は、前回の累積存在指数に移動時間係数を加算した数値である。例えば、目標物が人で移動時間係数が0.5であるとき、前回の累積存在指数が0.5であるとき今回求める累積存在指数が1.0になる。すなわち、更新周期の回数が2回で隣接するメッシュに目標物が移動できると推定する。なお、更新周期の回数が初期の場合、前回の累積存在指数は「0」になる。
【0061】
ステップS1207では、目標推定部303が累積存在指数の示す数値が1以上であるか否かを判定し、1以上である場合(累積存在指数≧1)にはステップS1208(Yes)に移行する。1より小さい場合(累積存在指数<1)にはステップS1210(No)に移行する。すなわち、隣接するメッシュに目標物が移動できると推定する。
【0062】
ステップS1208で目標推定部303は、目標物が存在するメッシュに隣接するメッシュを目標存在メッシュに決定する。
ステップS1209では、目標推定部303が何回目の更新周期で目標存在メッシュとなったかを記憶する。例えば、3回目の更新周期であれば図13の目標存在情報1301に、3回目の行(例えば、レコード)を生成して、目標存在メッシュを識別する情報を記憶する。
【0063】
ステップS1210では、目標推定部303が監視対象範囲の全てのメッシュについてステップS1205〜S1209に対応する処理を実施したか否かを判定する。すべてのメッシュに対して処理をしている場合にはステップS1211(Yes)に移行し、未処理のメッシュがある場合にはステップS1205(No)に移行する。メッシュ情報901に記憶されている全てのメッシュについて処理をしたか否かを判定する。
【0064】
ステップS1211では、目標推定部303が探知されている全ての目標物についてステップS1201〜S1209に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS1201(No)に移行する。探知した全ての目標物各々に対して目標物が移動する可能性があるメッシュを求めたら、処理を終了する。ステップS1211からステップS1201に移行した場合には、ステップS1201で次の目標物IDを取得する。
【0065】
図15〜図20を用いて更新周期における目標存在メッシュの状態を説明する。
図15〜図20に示すメッシュを識別する情報は、IDm1〜IDm14(1行目:最下位の行)、IDm15〜IDm28(2行目)、IDm29〜IDm42(3行目)・・・IDm183〜IDm196(14行目:最上位の行)の順番で割り振られている。図15〜図20に示されているメッシュ上段の「可」はメッシュ情報901の目標物が移動可能を示し、「否」はメッシュ情報901の目標物が移動できないことを示している。また、図15〜図20に示されているメッシュ下段の「1.0」「0.5」「0.2」などは目標物に対応する移動時間係数を示している。図16〜図20に示されているメッシュ中段の「(1)」「(2)」「(3)」「(4)」「(5)」は目標存在メッシュに決定した更新周期の回数を示している。図16〜図20に示されているメッシュ中段の「0.2」「0.4」「0.6」「0.8」「0.5」は累積存在指数を示している。
【0066】
図15には、初期の更新周期の目標存在メッシュとしてIDm76,90−92,104−107,119−121」が記憶されている。なお、電源投入時には目標存在メッシュは示されていない。目標存在メッシュは、探知情報を受信して更新周期になった場合に更新される。なお、電源断時に現在の目標存在メッシュを記憶し、電源の再投入時に記憶しておいた目標存在メッシュを使用するか否かを問い合わせてもよい。使用する場合には、記憶しておいた目標存在メッシュを使用して、現在の日時までの更新周期分の目標存在メッシュを求める。記憶しておいた目標存在メッシュを使用しない場合には、目標存在メッシュがない状態から開始する。なお、電源投入時には累積存在指数(メッシュ中段)はまだ求められていないため示されていない。
【0067】
図16には、1回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134」が記憶されている。「IDm63,75,77,89,118,122,133,134」が目標存在メッシュとして増加している。移動できないメッシュ(「否」)は除外されるため、目標存在メッシュIDm107に隣接するメッシュIDm108は除外される。また、累積存在指数を求める対象のメッシュには「IDm135=0.2,IDm93=0.5,IDm103=0.5」が記憶されている。例えば、目標存在メッシュIDm92、107に隣接するメッシュIDm93は、移動時間係数が0.5なので1回目の更新周期では累積存在指数0.5が求められる。他のメッシュについての説明は省略する。
【0068】
図17には、2回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm135=0.4,IDm136=0.2,IDm78=0.5」が記憶されている。例えば、メッシュIDm134、121に隣接するメッシュIDm135は、移動時間係数が0.2なので1回目の更新周期では累積存在指数0.2が求められ、2回目の更新周期では累積存在指数0.4が求められる。さらに、メッシュIDm135と目標存在メッシュIDm122に隣接するメッシュIDm136の累積存在指数0.2が求められる。他のメッシュについての説明は省略する。
【0069】
図18には、3回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.2,IDm135=0.6,IDm136=0.4,IDm137=0.2,IDm94=0.5,IDm65=0.5,IDm102=0.5,IDm73=0.5」が記憶されている。
【0070】
図19には、4回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162,21,34,36,47,65,73,79,102,123,130,160,163,175,176」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.6,IDm135=0.8,IDm136=0.6,IDm137=0.4,IDm51=0.5」が記憶されている。
【0071】
図20には、5回目の更新周期の目標存在メッシュとして「IDm76,90−92,104−107,119−121,63,75,77,89,118,122,133,134,49,62,64,74,93,113,117,123,132,147,148,35,48,50,61,78,88,116,146,161,162,21,34,36,47,65,73,79,102,123,130,160,163,175,176,7,20,22,33,51,66,80,87,115,135,164,174,177,189,190」が記憶されている。また、累積存在指数を求める対象のメッシュには「IDm149=0.6,IDm136=0.8,IDm137=0.6,IDm138=0.2,IDm110=0.5、IDm95=0.5、IDm37=0.5、IDm73=0.5」が記憶されている。
【0072】
図21は、同一化部の動作の一実施例を示すフロー図である。図22は、同一化部の同一化処理の動作の一実施例を示すフロー図である。
ステップS2201では、同一化部304が探知情報をセンサから受信する。
【0073】
ステップS2202では、同一化部304が探知情報の観測日時を用いて、目標物に対応する目標存在情報と更新日時情報を参照し、観測日時または観測日時の直前に更新された更新日時に対応する目標存在メッシュの情報を目標存在情報309より取得する。現在目標存在情報309により管理されている複数の目標物各々に対して、目標物各々に対応する目標存在メッシュの情報を抽出する。
【0074】
ステップS2203では、同一化部304が探知情報に含まれる目標物各々に対して後述する同一化処理を行う。図22のフロー図を参照。
ステップS2204では、同一化部304が全ての探知情報に含まれる目標物全てについてステップS2201〜S2203の処理を実施したか否かを判定し、全て処理を実施していればこの処理を終了(Yes)する。また、未処理がある場合はステップS2201(No)に移行する。
【0075】
同一化処理について説明する。
ステップS2301では、同一化部304が探知情報に含まれる現在選択されている目標物の位置座標を含むメッシュが、ステップS2202で抽出した目標物に対応する目標存在メッシュに含まれるか否かを判定する。含まれていればステップS2302(Yes)に移行し、含まれていなければステップS2308(No)に移行する。例えば、抽出した目標物に対応する目標存在メッシュが、目標物ID1〜IDn各々に対して生成された目標存在メッシュであるとする。nは1以上の整数とする。目標物ID1〜IDnに対応する目標存在情報各々に含まれる目標存在メッシュに、探知情報に含まれる目標物の位置座標を含むメッシュが含まれるか否かを判定し、含まれていればステップS2302(Yes)に移行する。また、探知情報に含まれる目標物の位置座標を含むメッシュが、含まれる目標存在メッシュに対応する目標物を識別するIDを抽出して記憶する。なお、探知情報に含まれる現在選択されている目標物の位置座標を含むメッシュが、目標物ID1〜IDnに対応する目標存在情報各々に含まれる目標存在メッシュに含まれていない場合、新しい目標物が探知されたと推定する。ステップS2301により、現在管理されている複数の目標物の中から、探知された目標物と一致する目標物を絞り込むことができる。
【0076】
ステップS2302では、同一化部304が探知情報に含まれる現在選択されている目標物の類別が、ステップS2301で抽出されたいずれかの目標物の類別と同一であるか否かを判定し、同一であればステップS2303(Yes)に移行する。その際、類別が同一の目標物を識別するIDを記憶する。全てのステップS2301で判定された目標物に対応する目標存在メッシュの類別が、現在選択されている目標物の類別と一致しない場合はステップS2308(No)に移行する。ステップS2302により、現在管理されている複数の目標物の中から、探知された目標物と一致する目標物がさらに絞り込むことができる。
【0077】
ステップS2303では、同一化部304がステップS2302で判定された類別が同一の目標物の数が複数あるか否かを判定し、複数ある場合にはステップS2305(Yes)に移行し、1つの場合にはステップS2304(No)に移行する。
【0078】
ステップS2304では、同一化部304が探知情報に含まれる現在選択されている目標物と、絞り込まれた1つの目標物を関連付ける。例えば、絞り込んだ目標物がID1であれば、現在選択されている目標物をID1と関連付け、目標物の同一化を行う。
【0079】
ステップS2305では、同一化部304が複数の絞り込んだ目標物各々に対応する目標存在メッシュ数の合計を求める。ステップS2306では、同一化部304が探知情報に含まれる現在選択されている目標物と目標存在メッシュ数の合計が小さい目標物を関連付け、目標物の同一化を行う。
【0080】
例えば、絞り込まれた目標物が2つの場合に、2つの目標物各々に対応する目標存在情報309に記憶されている目標存在メッシュについて図23に示す。図2401は絞り込まれた一方の目標物の監視対称範囲と目標存在メッシュを示し、図2402は絞り込まれた他方の目標物の監視対称範囲と目標存在メッシュを示す。図2401の目標存在メッシュ数(斜線)の合計は12で、図2402の目標存在メッシュ数(斜線)の合計が24である。その場合、ステップS2305で求めた図2401に対応する目標存在メッシュ数の合計の方が小さいので、合計値の小さい目標存在メッシュを関連する目標物を選択する。続いて、探知情報に含まれる現在選択されている目標物と合計が小さい目標物を関連付ける。
【0081】
ステップS2307では、同一化部304がステップS2304またはステップS2306で同一化した目標物の目標存在情報を更新する。同一化した目標物の目標存在情報の「基準座標」に現在記憶されている情報に、同一化した目標物の基準座標を上書きして「基準座標」を更新する。その際、目標推定部303で行う目標存在メッシュの推定で用いる基準となるメッシュの位置が変更される。
【0082】
ステップS2308で同一化部304は、目標存在情報の抽出対象の目標物が、今回の探知情報に含まれるいずれかの目標物と同一化処理済であるかどうかを管理し、既に同一化処理済の抽出対象の目標物は同一化処理の対象から除外する。既に同一化処理済の抽出対象の目標物には、目標存在情報に同一化処理済みを示す情報を記憶する。例えば、目標存在情報に同一化処理済みであること示す情報を記憶する「同一化処理済み」を設け、「1」または「0」などを記憶する。「1」は同一化処理済みを示し、「0」は同一化処理が未処理であることを示すようにする。ただし、同一化処理済みに関する処理は上記に限定されるものではない。
【0083】
なお、「同一化処理済み」に「1」が設定されている場合にはステップS2307で同一化部304は目標存在情報の更新をしなくてもよい。
【0084】
ステップS2309では、同一化部304が新しい目標物を探知したとして、新しい目標物に対応する目標存在情報を生成して、記憶部6に記憶する。
ステップS2310では、同一化部304が現在選択されている目標物に関して、探知情報の観測日時から現在の日時まで目標物が存在するメッシュを基準として、目標存在メッシュを決定する。例えば、目標推定部303で説明したように目標物が移動可能なメッシュを推定することが考えられる。
【0085】
図24は、反映部の動作の一実施例を示すフロー図である。
ステップS2501では、反映部305が否定情報受信をセンサなどから受信する。
ステップS2502では、反映部305が否定情報の観測地域を参照して観測地域に地名が設定されているか否かを判定し、地名が設定されていればステップS2503(Yes)に移行し、地名が設定されていなければステップS2504(No)に移行する。例えば、図7に示す否定情報701を受信した場合には地名「MN」が記憶されているのでステップS2503に移行する。
【0086】
ステップS2503では、反映部305がメッシュ情報307から地域名に対応したメッシュを抽出し、否定対象メッシュを決定する。例えば、否定情報の観測地域に「MN」がある場合、図9のメッシュ情報901の「地域」に対応する情報を参照すると「MN」が記憶されているので、該メッシュを否定対象メッシュに決定する。
【0087】
ステップS2504では、反映部305が否定情報の「観測位置座標」「観測手段」「観測方位」などを用いて観測者見通しを算出する。観測者見通しは観測者が見通せる範囲で、例えば、観測者またはセンサなどにより目標物を監視する場合に、観測者の位置から観測する方位(方向)により決まる範囲である。また、障害物(例えば、山、建造物など)がある場合には障害物より先が見えないため、観測者見通しの範囲から除外される。なお、観測者見通しは既存の技術により求めることができる。
ステップS2505では、反映部305がステップS2504で求めた観測者見通し(範囲)に対応するメッシュを否定対象メッシュとする。
【0088】
図25〜図28を用いて、否定情報がある時点の一時的な情報である場合に行う反映処理について説明する。
図25は、反映部の動作の一実施例を示すフロー図である。
ステップS2601では、反映部305が否定情報の観測日時に最も近い過去の更新日時における目標存在メッシュを抽出する。反映部305は、否定情報の観測日時を用いて、目標存在情報309に記憶されている目標物の更新周期の回数(「初期」「1」「2」・・・)を参照し、目標物において最も近い過去の更新日時に対応する目標存在メッシュを抽出する。
【0089】
図26の表2701に示す目標存在情報の更新周期の回数を示す「更新周期の回数」に示されている「初期」(更新日時「2011/9/8/9:00:00」)〜「3回目」(更新日時「2011/9/8/9:02:15」)より後で否定情報を受信したとする。本例では、否定情報を受信日時2011/9/8/9:02:30に受信し、否定情報が有する観測日時には「2011/9/8/9:02:00」、地域には「MN」、否定類別には「目標なし」が含まれている。従って、観測日時に最も近い過去の更新日時は、「2回目」に対応する更新日時「2011/9/8/9:01:30となる。そして、現在の目標存在情報の「2回目」に対応する目標存在メッシュを識別する情報を抽出する。
【0090】
ステップS2602では、反映部305がステップS2601で抽出した目標存在メッシュのうち否定対象メッシュと一致するメッシュに目標物がないとし、否定情報を反映させる。図26の否定情報には否定類別に「なし」があるので、目標物(例えば、人、車両など)がないことになる。
【0091】
ステップS2603では、反映部305が否定情報の観測日時から現在日時に近くなるまで必要な更新周期の回数だけ、目標存在メッシュの更新を行う。観測日時+更新周期T×n<現在日時の条件を満たしている場合、n回だけ目標存在メッシュを更新する。必要な更新周期の回数だけ更新をした後は、更新周期45秒で更新を繰り返す。
n=0の場合は更新をしない。更新は、目標推定部303で説明した目標存在メッシュの更新と同様の処理である。
【0092】
図26の表2701の例では、否定情報の受信日時が「2011/9/8/9:02:30」であるので、現在日時を「2011/9/8/9:02:30」とする。また、否定情報の観測日時が「2011/9/8/9:02:00」であるので、n=0となり次の更新日時は「2011/9/8/9:02:45」(3回目)となる。
【0093】
受信日時(現在日時)が「2011/9/8/9:04:20」で、観測日時が「2011/9/8/9:02:00」で、更新周期が45秒である場合について説明する。現在日時が「2011/9/8/9:04:20」であるので、観測日時から現在日時を越えるまでに必要な更新周期の回数は3回になる。その結果、観測日時「2011/9/8/9:02:00」+更新周期「45秒」×3回=「2011/9/8/9:04:15」が求まる。つまり、更新周期は「5回目」となる(「2011/9/8/9:04:15」<現在日時「2011/9/8/9:04:20」)。更新を3回した後、更新周期45秒で更新を繰り返す。
【0094】
図27は否定情報を反映させた図で、目標物がないメッシュには左上から右下に斜め線がひかれている。本例では、IDm119〜IDm124、IDm133〜IDm138、IDm147〜IDm152が目標物がいないメッシュである。
【0095】
図28は2回目で否定情報を反映させた後の3回目の目標存在メッシュの状態を示す図である。否定情報が反映された目標物が存在する可能性があるメッシュIDm119〜IDm123、IDm133〜IDm136、IDm147、IDm148は、目標存在メッシュでなくなるとともに、更新回数と累積存在指数が初期値に戻る。そして、3回目で更新されメッシュIDm119〜IDm120、IDm133も目標存在メッシュになる。その後、5回目まで目標存在メッシュの更新を続ける。
【0096】
ステップS2604では、反映部305が目標物についてステップS2601〜S2603に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS2601(No)に移行する。
【0097】
図29〜図30を用いて、否定情報がある期間の継続的な情報である場合に行う反映処理について説明する。本例の否定情報には観測日時に観測期間(開始日時と終了日時)が記憶されている。
【0098】
図29は、反映部305の動作の一実施例を示すフロー図である。
ステップS3001では、反映部305が否定情報の観測日時の開始日時に最も近い過去の更新日時における目標存在メッシュを抽出する。反映部305は、否定情報の観測日時を用いて、目標存在情報309に記憶されている目標物の更新周期の回数(「初期」「1」「2」・・・)を参照し、目標物において最も近い過去の更新日時に対応する目標存在メッシュを抽出する。
【0099】
図30の表3101に示す目標存在情報の更新周期の回数を示す「更新周期の回数」に示されている「初期」(更新日時「2011/9/8/9:00:00」)〜「3回目」(更新日時「2011/9/8/9:02:15」)より後で否定情報を受信したとする。本例では、否定情報を受信日時2011/9/8/9:02:30に受信し、否定情報が有する観測日時には「2011/9/8/9:00:30」、地域には「MN」、否定類別には「目標なし」が含まれている。従って、観測日時の開始日時に最も近い過去の更新日時は、「初期」に対応する更新日時「2011/9/8/9:00:00となる。なお、「初期」でない場合には現在の目標存在情報の更新周期の回数に対応する目標存在メッシュを識別する情報を抽出する。
【0100】
ステップS3002では、反映部305がステップS3001で抽出した目標存在メッシュのうち否定対象メッシュと一致するメッシュに目標物がないとし、否定情報を反映させる。図30の否定情報には否定類別に「なし」があるので、目標物(例えば、人、車両など)がないことになる。
【0101】
ステップS3003では、反映部305が否定情報の観測日時から現在日時に近くなるまで必要な更新周期の回数だけ、目標存在メッシュの更新を行う。観測日時+更新周期T×n<現在日時の条件を満たしている場合、n回だけ目標存在メッシュを更新する。必要な更新周期の回数だけ更新をした後は、更新周期45秒で更新を繰り返す。
n=0の場合は更新をしない。更新は、目標推定部303で説明した目標存在メッシュの更新と同様の処理である。
【0102】
図31の表3101の例では、否定情報の受信日時が「2011/9/8/9:02:30」であるので、現在日時を「2011/9/8/9:02:30」とする。また、否定情報の観測日時が「2011/9/8/9:02:00」であるので、n=0となり次の更新日時の開始時刻は「2011/9/8/9:00:30」(1回目)となる。
【0103】
受信日時(現在日時)が「2011/9/8/9:02:30」で、観測日時の開始日時が「2011/9/8/9:00:30」で、更新周期が45秒である場合について説明する。現在日時が「2011/9/8/9:02:30」であるので、観測日時から現在日時を越えるまでに必要な更新周期の回数は3回になる。その結果、観測日時「2011/9/8/9:00:30」+更新周期「45秒」×3回=「2011/9/8/9:02:15」が求まる。つまり、更新周期は「3回目」となる(「2011/9/8/9:02:15」<現在日時「2011/9/8/9:02:30」)。更新を3回した後、更新周期45秒で更新を繰り返す。
【0104】
図31は否定情報を反映させた図で、目標物がないメッシュには左上から右下に斜め線がひかれている。本例では、IDm74〜IDm79、IDm88〜IDm93には目標物がいないメッシュである。観測日時の終了日時までの間は、否定対象メッシュを目標存在メッシュとしない。
【0105】
図32は2回目で否定情報を反映させた後の3回目の目標存在メッシュの状態を示す図である。否定情報が反映された目標物が存在する可能性があるメッシュIDm77、IDm90〜IDm92は、目標存在メッシュでなくなる。なお、更新回数と累積存在指数がある場合には、更新回数と累積存在指数は初期値に戻る。そして、3回目で目標存在メッシュと更新回数と累積存在指数を表示する。その後、5回目まで目標存在メッシュの更新を続ける。
【0106】
ステップS3005では、反映部305が目標物についてステップS3001〜S3004に対応する処理を実施したか否かを判定する。すべての目標物に対して処理をしている場合には処理を終了(Yes)し、未処理の目標物がある場合にはステップS3001(No)に移行する。ステップS3005からステップS3001に移行した場合には、ステップS3001で次の目標物IDを取得する。
【0107】
上記に示した実施形態では、センサによる探知情報や人の観測による情報を蓄積して目標物を継続的に管理する場合に、目標物がないことを示す否定情報を現在管理されている目標物の目標存在情報に反映させる。その結果、目標物が存在する可能性のある区域を絞り込むことができるため、目標物が存在する可能性のある区域を精度よく推定できる。
【0108】
また、目標物が移動可能な領域を精度よく推定できるため、センサなどの目標物の監視すべき区域が明確になるため、目標物の監視すべき区域を決定することが容易にできる。
また、本来は移動してしまった目標物がその位置に残って消せない、ノイズによって誤探知してしまった目標が残ってしまい消せないなどの、古い不要な情報が残存していたが、否定情報を反映させることで古い不要な情報の残存することを抑止できる。不要な情報の抑止により、現在の目標物の所在の特定が精度よく推定できる。
【0109】
また、本発明は、上記実施の形態に限定されるものでなく、本発明の要旨を逸脱しない範囲内で種々の改良、変更が可能である。
【符号の説明】
【0110】
1 目標物管理装置
2 センサ部
3 受信部
4 通信部
5 制御部
6 記憶部
7 入出力部
200 監視対象範囲
201、902 メッシュ
203、204、205、206、207、208 センサ
209、210 山
211、212、213、214、215 覆域
216 監視領域
301 メッシュ管理部
302 速度管理部
303 目標推定部
304 同一化部
305 反映部
306 地図情報
307、901 メッシュ情報
308、1101 速度情報
309、1301 目標存在情報
401 センサ
402 センサ部
403 制御部
404 記憶部
405 入出力部
406 通信部
601 センサ情報
602 探知情報
701 否定情報
1001 移動時間係数情報
1002 係数補正情報
1501 更新日時情報
IDm1〜IDm196 メッシュ
【特許請求の範囲】
【請求項1】
監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、
探知した目標物の情報を有する探知情報を用いて、前記目標物の存在するメッシュを決定し、時間経過に応じて前記目標物の存在する目標存在メッシュを推定する目標推定部と、
前記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、前記目標存在メッシュを更新する同一化判定部と、
目標物がない地域を示す否定情報を受信すると、前記地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、
を備えることを特徴とする目標管理装置。
【請求項2】
前記メッシュ管理部は、
前記監視対象範囲を一定の区域に区切り複数の前記メッシュを生成し、前記メッシュの位置を示す基準座標と、前記メッシュの幅と、前記メッシュに目標物が移動できるか否かを示す移動可否と、前記メッシュに対応する区域の状況に応じて目標物が前記メッシュを移動するのに要する時間を決定するために用いる移動時間係数と、を関連付けるメッシュ情報を管理する、ことを特徴とする請求項1に記載の目標管理装置。
【請求項3】
前記目標推定部は、
探知された目標物により決まる移動速度と前記メッシュの幅とを用いて、探知された前記目標物がメッシュ間を移動可能な更新周期を求め、前記更新周期ごとに探知された前記目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとし、探知された前記目標物と、前記目標物の類別と、前記更新周期の回数と、前記更新周期ごとに求めた前記目標存在メッシュと、を関連付けて目標存在情報に記憶する、ことを特徴とする請求項1または2に記載の目標管理装置。
【請求項4】
前記同一化部は、
観測日時と、探知した前記目標物の位置と、前記目標物の類別を有する探知情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時で、探知した前記目標物の位置が前記目標存在メッシュに含まれ、前記目標物の類別が前記目標存在情報の前記類別と同一である前記目標存在情報に記憶されている目標物を検出し、検出した前記目標物が複数ある場合には前記目標存在メッシュの合計が小さい前記目標物を選択し、探知した前記目標物に関連付け、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、ことを特徴とする請求項1〜3のいずれか1つに記載の目標管理装置。
【請求項5】
前記反映部は、
観測日時と、前記目標物が存在しない地域とを有する否定情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時に関連付けられている前記目標存在メッシュを抽出し、前記目標物が存在しない地域が示すメッシュと一致する抽出した前記目標存在メッシュを目標物が存在しないメッシュにし、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、ことを特徴とする請求項1〜4のいずれか1つに記載の目標管理装置。
【請求項6】
前記反映部は、
前記観測日時に観測を開始した開始日時と終了した終了日時を有する前記否定情報を受信すると、前記開始日時から前記終了日時の期間、前記否定情報が有する前記目標物が存在しない地域に前記目標存在メッシュがないとして前記目標存在メッシュを求める、ことを特徴とする請求項5に記載の目標物管理装置。
【請求項7】
前記目標推定部は、
前記目標物の類別により決まる移動速度を用いて前記更新周期を変更することを特徴とする請求項3に記載の目標物管理装置。
【請求項8】
監視対象範囲を一定の区域からなるメッシュに区切り、管理し、
探知した目標物の情報を有する探知情報を用いて、前記目標物の存在するメッシュを決定し、時間経過に応じて前記目標物の存在する目標存在メッシュを推定し、
前記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、前記目標存在メッシュを更新し、
目標物がない地域を示す否定情報を受信すると、前記地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する、
処理をコンピュータが実行することを特徴とする目標物管理方法。
【請求項9】
前記監視対象範囲を一定の区域に区切り複数の前記メッシュを生成し、前記メッシュの位置を示す基準座標と、前記メッシュの幅と、前記メッシュに目標物が移動できるか否かを示す移動可否と、前記メッシュに対応する区域の状況に応じて目標物が前記メッシュを移動するのに要する時間を決定するために用いる移動時間係数と、を関連付けるメッシュ情報を生成して記憶部に記憶し、
探知された目標物により決まる移動速度と前記メッシュの幅とを用いて、探知された前記目標物がメッシュ間を移動可能な更新周期を求め、
前記更新周期ごとに探知された前記目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとし、探知された前記目標物と、前記目標物の類別と、前記更新周期の回数と、前記更新周期ごとに求めた前記目標存在メッシュと、を関連付ける目標存在情報を生成して記憶部に記憶し、
観測日時と、探知した前記目標物の位置と、前記目標物の類別を有する探知情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時で、探知した前記目標物の位置が前記目標存在メッシュに含まれ、前記目標物の類別が前記目標存在情報の前記類別と同一である前記目標存在情報に記憶されている目標物を検出し、
検出した前記目標物が複数ある場合には前記目標存在メッシュの合計が小さい前記目標物を選択し、探知した前記目標物に関連付け、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶し、
観測日時と、前記目標物が存在しない地域とを有する否定情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時に関連付けられている前記目標存在メッシュを抽出し、
前記目標物が存在しない地域が示すメッシュと一致する抽出した前記目標存在メッシュを目標物が存在しないメッシュにし、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、
処理を前記コンピュータが実行することを特徴とする請求項8に記載の目標物管理方法。
【請求項10】
前記観測日時に観測を開始した開始日時と終了した終了日時を有する前記否定情報を受信すると、前記開始日時から前記終了日時の期間、前記否定情報が有する前記目標物が存在しない地域に前記目標存在メッシュがないとして前記目標存在メッシュを求める、
処理を前記コンピュータが実行することを特徴とする請求項9に記載の目標物管理方法。
【請求項11】
前記目標物の類別により決まる移動速度を用いて前記更新周期を変更する、
処理を前記コンピュータが実行することを特徴とする請求項9または10に記載の目標物管理方法。
【請求項1】
監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、
探知した目標物の情報を有する探知情報を用いて、前記目標物の存在するメッシュを決定し、時間経過に応じて前記目標物の存在する目標存在メッシュを推定する目標推定部と、
前記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、前記目標存在メッシュを更新する同一化判定部と、
目標物がない地域を示す否定情報を受信すると、前記地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、
を備えることを特徴とする目標管理装置。
【請求項2】
前記メッシュ管理部は、
前記監視対象範囲を一定の区域に区切り複数の前記メッシュを生成し、前記メッシュの位置を示す基準座標と、前記メッシュの幅と、前記メッシュに目標物が移動できるか否かを示す移動可否と、前記メッシュに対応する区域の状況に応じて目標物が前記メッシュを移動するのに要する時間を決定するために用いる移動時間係数と、を関連付けるメッシュ情報を管理する、ことを特徴とする請求項1に記載の目標管理装置。
【請求項3】
前記目標推定部は、
探知された目標物により決まる移動速度と前記メッシュの幅とを用いて、探知された前記目標物がメッシュ間を移動可能な更新周期を求め、前記更新周期ごとに探知された前記目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとし、探知された前記目標物と、前記目標物の類別と、前記更新周期の回数と、前記更新周期ごとに求めた前記目標存在メッシュと、を関連付けて目標存在情報に記憶する、ことを特徴とする請求項1または2に記載の目標管理装置。
【請求項4】
前記同一化部は、
観測日時と、探知した前記目標物の位置と、前記目標物の類別を有する探知情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時で、探知した前記目標物の位置が前記目標存在メッシュに含まれ、前記目標物の類別が前記目標存在情報の前記類別と同一である前記目標存在情報に記憶されている目標物を検出し、検出した前記目標物が複数ある場合には前記目標存在メッシュの合計が小さい前記目標物を選択し、探知した前記目標物に関連付け、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、ことを特徴とする請求項1〜3のいずれか1つに記載の目標管理装置。
【請求項5】
前記反映部は、
観測日時と、前記目標物が存在しない地域とを有する否定情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時に関連付けられている前記目標存在メッシュを抽出し、前記目標物が存在しない地域が示すメッシュと一致する抽出した前記目標存在メッシュを目標物が存在しないメッシュにし、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、ことを特徴とする請求項1〜4のいずれか1つに記載の目標管理装置。
【請求項6】
前記反映部は、
前記観測日時に観測を開始した開始日時と終了した終了日時を有する前記否定情報を受信すると、前記開始日時から前記終了日時の期間、前記否定情報が有する前記目標物が存在しない地域に前記目標存在メッシュがないとして前記目標存在メッシュを求める、ことを特徴とする請求項5に記載の目標物管理装置。
【請求項7】
前記目標推定部は、
前記目標物の類別により決まる移動速度を用いて前記更新周期を変更することを特徴とする請求項3に記載の目標物管理装置。
【請求項8】
監視対象範囲を一定の区域からなるメッシュに区切り、管理し、
探知した目標物の情報を有する探知情報を用いて、前記目標物の存在するメッシュを決定し、時間経過に応じて前記目標物の存在する目標存在メッシュを推定し、
前記目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、前記目標存在メッシュを更新し、
目標物がない地域を示す否定情報を受信すると、前記地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する、
処理をコンピュータが実行することを特徴とする目標物管理方法。
【請求項9】
前記監視対象範囲を一定の区域に区切り複数の前記メッシュを生成し、前記メッシュの位置を示す基準座標と、前記メッシュの幅と、前記メッシュに目標物が移動できるか否かを示す移動可否と、前記メッシュに対応する区域の状況に応じて目標物が前記メッシュを移動するのに要する時間を決定するために用いる移動時間係数と、を関連付けるメッシュ情報を生成して記憶部に記憶し、
探知された目標物により決まる移動速度と前記メッシュの幅とを用いて、探知された前記目標物がメッシュ間を移動可能な更新周期を求め、
前記更新周期ごとに探知された前記目標物が存在すると推定されるメッシュから移動可能な隣接するメッシュを求め目標存在メッシュとし、探知された前記目標物と、前記目標物の類別と、前記更新周期の回数と、前記更新周期ごとに求めた前記目標存在メッシュと、を関連付ける目標存在情報を生成して記憶部に記憶し、
観測日時と、探知した前記目標物の位置と、前記目標物の類別を有する探知情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時で、探知した前記目標物の位置が前記目標存在メッシュに含まれ、前記目標物の類別が前記目標存在情報の前記類別と同一である前記目標存在情報に記憶されている目標物を検出し、
検出した前記目標物が複数ある場合には前記目標存在メッシュの合計が小さい前記目標物を選択し、探知した前記目標物に関連付け、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶し、
観測日時と、前記目標物が存在しない地域とを有する否定情報を受信すると、前記観測日時または直前の前記目標存在情報の前記更新周期の回数に対応する更新日時に関連付けられている前記目標存在メッシュを抽出し、
前記目標物が存在しない地域が示すメッシュと一致する抽出した前記目標存在メッシュを目標物が存在しないメッシュにし、前記更新日時から現在の日時までに含まれる前記更新周期の回数分の前記目標存在メッシュを求め、前記目標存在情報に記憶する、
処理を前記コンピュータが実行することを特徴とする請求項8に記載の目標物管理方法。
【請求項10】
前記観測日時に観測を開始した開始日時と終了した終了日時を有する前記否定情報を受信すると、前記開始日時から前記終了日時の期間、前記否定情報が有する前記目標物が存在しない地域に前記目標存在メッシュがないとして前記目標存在メッシュを求める、
処理を前記コンピュータが実行することを特徴とする請求項9に記載の目標物管理方法。
【請求項11】
前記目標物の類別により決まる移動速度を用いて前記更新周期を変更する、
処理を前記コンピュータが実行することを特徴とする請求項9または10に記載の目標物管理方法。
【図1】


【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図21】
【図22】
【図24】
【図25】
【図26】
【図29】
【図30】
【図2】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図23】
【図27】
【図28】
【図31】
【図32】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図21】
【図22】
【図24】
【図25】
【図26】
【図29】
【図30】
【図2】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図23】
【図27】
【図28】
【図31】
【図32】
【公開番号】特開2013−80396(P2013−80396A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−220347(P2011−220347)
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]