
目標相関処理装置、目標相関処理方法及びプログラム
【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のセンサで捕らえた目標物を捕捉した際の当該目標物の各センシングデータの相関処理を行うことで複数のセンサで捕らえた1つの目標物のセンシングデータを、一つの目標物の情報として統合する目標相関処理装置、目標相関処理方法及びプログラムに関する。
【背景技術】
【0002】
目標検出のためのセンサを搭載した航空機や、地上基地に設置したレーダ等の各種センサからの目標物の目標情報等を収集し、それら情報を元に目標物の早期発見及び追尾が可能な目標相関処理装置が実用化されている。各種センサからの情報はネットワークを経由して目標相関処理装置まで伝送され、目標相関処理装置では各センサで取得された目標物に関する情報の相関処理を行う。具体的には、重複した情報の統合化や、過去に収集した情報を元に今後の目標物の移動予測を行うといった処理がなされる。
この他、航空管制分野においても、複数レーダで捉えた航空機情報の統合化、断続的にしか得られないレーダ情報を追尾補間し、現在の飛行位置を算定する航空管制システム(目標相関処理装置)が実用化されている。このような技術に関連する特許が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−97900号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したように、現在実用化される目標相関処理装置やそのシステムは空中目標物である航空機や飛翔体に対する処理を想定したものが多い。空中目標物の場合、運動の移動方向や速度には一定の継続性があるため、その挙動については相関処理アルゴリズムとして確立されたものがある。一方、地上目標物の場合、地形や地勢等の影響から車両は前進後退、右左折をしてその挙動は不規則である。従って、地上目標物に適した目標相関処理装置の提供が必要である。
【0005】
そこでこの発明は、地上目標物に適した目標相関処理装置、目標相関処理方法及びプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信部と、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測部と、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理部と、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理部と、を備えることを特徴とする目標相関処理装置である。
【0007】
また本発明は、目標相関処理装置における目標相関処理方法であって、前記目標相関処理装置のセンシング情報受信部が、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信し、前記目標相関処理装置の移動予測部が、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新し、前記目標相関処理装置の相関判定処理部が、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定し、前記目標相関処理装置のシステム目標管理部が、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新することを特徴とする目標相関処理方法である。
【0008】
また本発明は、目標相関処理装置のコンピュータを、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信手段、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測手段、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理手段、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理手段、として機能させることを特徴とするプログラムである。
【発明の効果】
【0009】
本発明によれば、目標相関処理装置は、地上の目標物が移動できる地点における所定時間後の位置座標や速度や移動方向を予測して過去に目標物捕捉センサから取得した目標物センシング情報を更新して、新たに目標物捕捉センサから取得した目標物センシング情報との相関を判定している。したがって、地上目標物に適した目標物相関処理を行なう目標相関処理装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】目標相関処理装置を備えた目標相関処理システムを示す図である。
【図2】目標相関処理装置の機能ブロック図である。
【図3】目標相関処理装置の処理フローを示す図である。
【図4】移動予測処理の概要を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の一実施形態による目標相関処理装置を図面を参照して説明する。
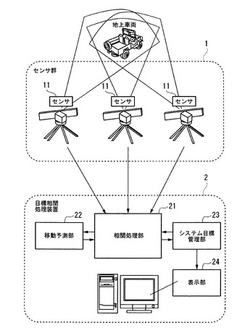
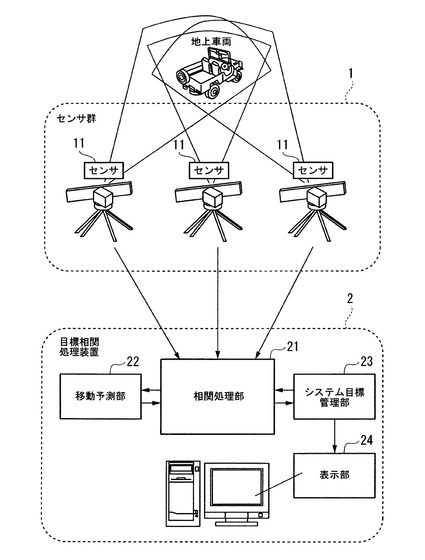
図1は同実施形態による目標相関処理装置を備えた目標相関処理システムを示す図である。
この図において、符号1は複数のセンサを有するセンサシステム、2は目標相関処理装置である。センサシステム1により構成される目標物捕捉センサ11は、例えばレーダであり、電磁波を照射して目標物である地上車両10の目標物捕捉センサ11からの距離や速度等の目標物センシング情報を検出する。また目標相関処理装置1は、通信ネットワークを介してセンサシステム1を構成する各目標物捕捉センサ11と接続されており、目標物捕捉センサ11から目標物センシング情報を受信する。そして目標相関処理装置1は、過去に目標物捕捉センサ11が検出した目標物センシング情報に含まれる目標物の位置や位置、速度、移動方向などを更新する移動予測部22、複数の目標物捕捉センサ11で検出された目標物センシング情報の相関を判定する相関処理部21、目標物センシング情報の相関に基づいて複数の目標物捕捉センサ11で検出された1つの目標物に対応する各目標物センシング情報を対応付けて管理するシステム目標管理部23、目標物の情報を表示する表示部24を備えている。
【0012】
本実施形態による目標相関処理装置2は、目標物捕捉センサ11が検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信する。また、目標相関処理装置2は、目標物センシング情報が示す目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する。そして、目標相関処理装置2は、受信した目標物センシング情報の示す属性に一致し、かつ予測処理により更新された更新後の目標物センシング情報を、データベース(システム目標記憶部)から読み取って、それら受信した目標物センシング情報と更新後の目標物センシング情報とが相関するかを判定し、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
このような処理を行うことにより、目標相関処理装置2は、複数の目標物捕捉センサ11が検出した地上を移動する目標物のセンシング情報うち、相関関係があるか否かの判定の処理を適切に行う。
【0013】
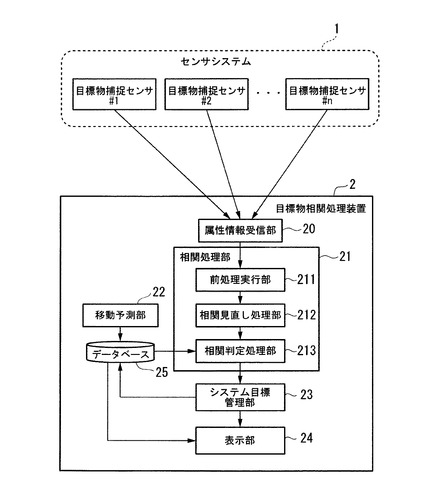
図2は目標相関処理装置の機能ブロック図である。
図3は目標相関処理装置の処理フローを示す図である。
次に、図2,図3を用いて目標相関処理装置の処理フローについて説明する。
図2で示すように、センサシステム1は複数の目標物捕捉センサ11(♯1〜♯n)を備える。そして、目標相関処理装置2は、それら目標物捕捉センサ11(♯1〜♯n)から送信される目標物センシング情報を受信するセンシング情報受信部20の他、相関処理部21、移動予測部22、システム目標管理部23、表示部24、データベース25を備えている。なお相関処理部21は前処理実行部211、相関見直し処理部212、相関判定処理部213の各機能構成を有している。
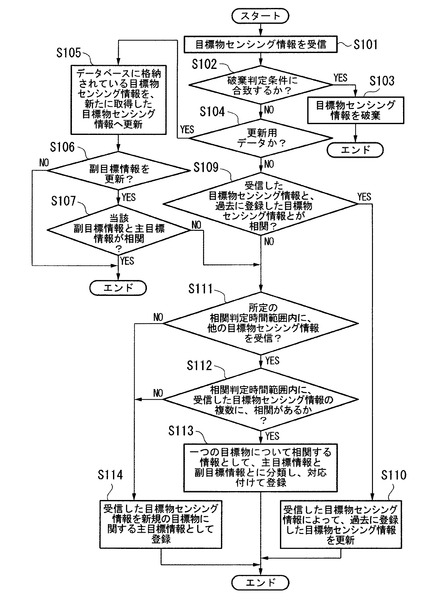
そして、まず、目標相関処理装置2のセンシング情報受信部20が、各目標物捕捉センサ11より目標物センシング情報を受信する(ステップS101)。この目標物センシング情報には、検出した目標物の位置座標、速度、加速度、移動方向、物体種別、検出時刻、目標物センシング情報を送信した目標物捕捉センサ11を識別するセンサ識別ID、当該目標物センシング情報を識別するためのセンシング識別ID、目標物捕捉センサ11が過去に送信した目標物センシング情報が示す目標物と同一の目標物を検出した場合の目標物センシング情報であるかを示す目標物同一性識別IDなどの情報が格納されている。
【0014】
目標相関処理装置2は目標物センシング情報を受信すると、前処理実行部211がその情報を取得し、破棄判定条件に合致するかを判定する(ステップS102)。破棄判定条件は、
(1)新たに取得した目標物センシング情報に含まれる検出時刻と現在時刻とを比較して破棄判定時間閾値以上の時刻差がある場合には、その目標物センシング情報を破棄する。
(2)新たに取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDの組が、過去に取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDの組と同一である場合には、同一の目標物捕捉センサ11から、同一の目標物センシング情報を取得したものとして、その新たに取得した目標物センシング情報を破棄する。
(3)新たに取得した目標物センシング情報に含まれる各情報のうち、不正値や例外値が含まれているかを判定し、含まれている場合には(例えば、各情報に閾値を設けるなどして判定)、その新たに取得した目標物センシング情報を破棄する(ステップS103)。
そして、前処理実行部211は、破棄判定条件に合致しない目標物センシング情報を相関見直し処理部212へ出力する。
【0015】
相関見直し処理部212は目標物センシング情報を取得すると、その目標物センシング情報がデータベース25に過去に登録された目標物センシング情報の更新用データかを判定する(ステップS104)。例えば、センサ識別IDとセンシング識別IDと目標物同一性識別IDの組が一致する目標物センシング情報が、既にデータベース25に格納されており、かつ、それら目標物センシング情報の示す検出時刻の差が所定の更新判定用の時刻差以内である場合には、新たに取得した目標物センシング情報を更新用データと判定する。そして、相関見直し処理部212は、新たに取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組と一致する、既にデータベース25に格納されている目標物センシング情報を、当該新たに取得した目標物センシング情報へ更新する(ステップS105)。例えば、相関見直し処理部212は、目標物Aに関するも目標物センシング情報を10時00分に取得し、その3分後の10時03分にセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組合せが同一の目標物Aに関する目標物センシング情報を新たに取得した場合には、3分の時刻差が更新判定用の時刻差以内であると判定し、データベース25に既に登録されている10時00分に登録された目標物センシング情報を、10時03分の目標物センシング情報へ更新する。更新を行なった場合には、その更新に利用した目標物センシング情報の処理は終了する。
【0016】
ここで、データベース25において目標物センシング情報は、主目標情報と副目標情報に分類されて登録される。相関のある目標物センシング情報(つまり、複数の目標物捕捉センサ11において検出された同一の目標物を示す各目標物センシング情報)はデータベース25に対応付けられて登録されている。このとき、目標物センシング情報を検出した目標物捕捉センサ11に与えられる優先順位や検出精度、目標物センシング情報に含まれる距離(目標物捕捉センサ11から目標物までの距離)の何れか一つまたは複数によって特定できる確信度によって、相関のある複数の目標物センシング情報のうち、最も確信度が高い目標物センシング情報が主目標情報とし登録され、他の目標物センシング情報が副目標情報として主目標情報に対応付けられて登録される。
【0017】
また、相関見直し処理部212は、ステップS105の更新の処理が、副目標情報としてデータベース25に登録されている目標物センシング情報を、新たに取得した目標物センシング情報へ更新した処理であったかを判定し(ステップS106)、その場合には、その更新後の副目標情報と、それに対応する主目標情報の各目標物センシング情報の相関の見直しを行う。相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応付けられてデータベース25に登録されている主目標情報を示す目標物センシング情報とをデータベース25から読み取り、相関判定を行う(ステップS108)。この相関判定は、例えば、各目標物センシング情報に含まれる座標位置の距離が所定の距離閾値以内であるかを判定し、距離閾値以内であれば2つの目標物センシング情報は相関すると判定する等の処理により行う。そして、相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報とを「相関有り」と判定した場合には、それら更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報との従属関係を保つため、データベース25においてそのまま対応付けて登録しておく。他方、相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報とを「相関無し」と判定した場合には、更新した副目標情報を示す目標物センシング情報について、当該目標物捕捉センサ11より受信した目標物センシング情報の当該受信時刻を基準とする所定の相関判定時間範囲内に、他の目標物捕捉センサ11より目標物センシング情報を受信していないかを判定し、また、相関判定時間範囲内に受信した目標物センシング情報の複数に、相関があるか否かの判定を行なうといった、下記のステップS111,S112の処理を行なう。つまり、この処理によれば、目標物Aに関するとして、主目標情報を示す目標物センシング情報と、副目標情報を示す目標物センシング情報を対応付けて登録している状態において、当該副目標情報を、受信した目標物センシング情報によって更新したとする。その場合、主目標情報と副目標情報とが相関していればそのままの対応関係が保持され、主目標情報と副目標情報が相関しなくなれば、更新した副目標情報を、新たに主目標情報として登録するか、または他の主目標情報を示す目標物センシング情報に対応する副目標情報として登録することとなる。
【0018】
次に、相関判定処理部213は、目標物捕捉センサ11より受信した目標物センシング情報が更新用データでないとステップS104において判定した場合、その目標物センシング情報に格納されているセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組合せが同一の、過去にデータベース25に登録した目標物センシング情報を特定する。そして、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報とを比較し、相関を判定する(ステップS109)。ここで、過去にデータベース25に登録した目標物センシング情報は、移動予測部22によって、当該目標物センシング情報に含まれる座標位置、速度、移動方向などが更新されている(移動予測部22の処理の詳細については後述する)。従って、移動予測部22が目標物の移動予測処理により更新したデータベース25に格納されている目標物センシング情報と、目標物捕捉センサ11より新たに受信した目標物センシング情報との相関が取れなくなっている可能性がある。相関があると相関判定処理部213が判定した場合には、システム目標管理部23が、目標物捕捉センサ11より受信した目標物センシング情報によって、対応するデータベース25に格納されている目標物センシング情報を更新する(ステップS110)。
【0019】
ここで、相関判定処理部213は、更新した目標物センシング情報が副目標情報である場合、当該副目標情報である目標物センシング情報と、それに対応する主目標情報としてデータベース25に登録されている目標物センシング情報との確信度を算出する。そして、主目標情報を示す目標物センシング情報の確信度よりも、副目標情報を示す目標物センシング情報の確信度が大きい場合、相関判定処理部213は、データベース25に登録されている情報について、それまで主目標情報を示していた目標物センシング情報を、副目標情報を示す情報へと変更し、また、それまで副目標情報を示していた目標物センシング情報を、主目標情報を示す情報へと変更する。確信度の算出は、例えば、上述したように、目標物センシング情報を検出した目標物捕捉センサ11に与えられた優先順位や検出精度、目標物センシング情報に含まれる距離(目標物捕捉センサ11から目標物までの距離)の何れか一つまたは複数によって算出する。確信度の算出手法はこれ以外の方法であってもよい。
なお、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報との相関有無の判定は、相関見直し処理部212の相関判定の処理と同様に、例えば、各目標物センシング情報に含まれる座標位置の距離が所定の距離閾値以内であるかを判定し、距離閾値以内であれば2つの目標物センシング情報は相関すると判定する等の処理により行う。
【0020】
次に、相関判定処理部213は、ステップS109の相関判定において、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報との相関がないと判定した場合、目標物捕捉センサ11より受信した目標物センシング情報の当該受信時刻を基準とする所定の相関判定時間範囲内に、他の目標物捕捉センサ11より目標物センシング情報を受信していないかを判定する(ステップS111)。そして、相関判定時間範囲内に受信した目標物センシング情報の複数に、相関があるか否かの判定を行なう(ステップS112)。相関判定の処理は、ステップS109の処置と同様に行なう。そして、相関判定処理部213は、相関がある複数の相関判定情報を検出した場合には、システム目標管理部23が、それらを一つの目標物について相関する情報として、確信度に基づいて主目標情報と副目標情報とに分類し、対応付けてデータベース25に登録する(ステップS113)。相関判定時間範囲内に受信した目標物センシング情報のいずれにも相関しないと判定した場合には、相関判定処理部213は、目標物捕捉センサ11より受信した目標物センシング情報を新規の目標物に関する主目標情報としてデータベース25に登録する(ステップS114)。
【0021】
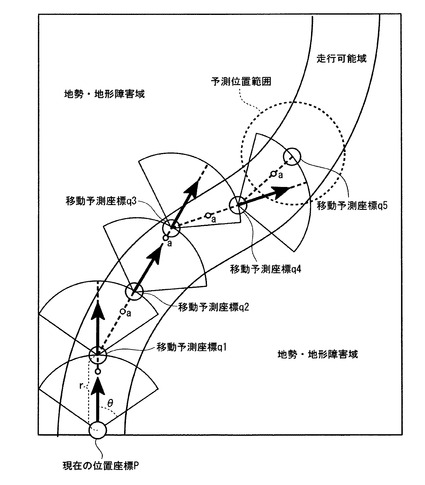
図4は移動予測処理の概要を示す図である。
次に、図4を用いて移動予測部22の処理の詳細について説明する。
移動予測部22は、データベース25に登録されている主目標情報または副目標情報として登録されている目標物センシング情報の示す各情報のうち、目標物の移動に関する情報、例えば、位置座標、速度、移動方向などの情報を更新する。
1つの目標物センシング情報の示す目標物の移動予測の処理において、まず、移動予測部22は、データベース25より、対象となる目標物センシング情報の示す現在の位置座標p、速度vまたは初速度v0や加速度a、移動方向(x,y)を読み取る。そして、位置座標pを基点とし、移動方向(x1,y1)を中心とする予測角度範囲2θおよび、t秒間で目標物が移動できる移動距離r(r=vt,r=v0t+(1/2*at2))によって特定できる円弧範囲の、最も進行難度の低い地点を通過する新たな移動方向(x2,y2)と、当該移動方向と円弧との交点である移動予測座標q1を特定する。最も進行難度の低い地点は、例えば道路であればその道路の中央点、または道路でなければ地図データ等から得た難度の低い地点の情報を用いる。または、最も進行難度の低い移動予測座標q1の計算を、地形や地勢等の状況を評価した地理データを外部から取り込み、現在の位置座標から特定した円弧上地点までの車両の移動に要する移動工数(移動の困難さ)を積算し、もっとも移動工数が少ない地点を選択する等の処理を行なって、当該進行難度の低い地点の移動予測座標q1を特定する。また、移動予測座標q1における目標物の速さv1(v1=v0+at,またはa=0の場合はv1=v)を予測処理する。そして、移動予測部22は、データベース25に登録されている予測対象の目標物センシング情報の位置座標p、速度v、移動方向(x,y)等を、t秒後の位置座標q1,速度v1や、移動方向(x2,y2)に書き換える。また移動予測部22は同様の処理によって、次のt秒後の移動予測座標q2を算出して、t秒ごとに順次データベース25に登録されている目標物センシング情報を更新していく(移動予測座標q3〜q5)。なお、更新間隔を示す時間t、予測角度範囲θ、及び円弧上における地点計算の粒度(サンプリング数)等は外部からパラメータにより指定されるようにすればよい。そして、当該更新した目標物センシング情報に対応する新たな目標物センシング情報を受信したタイミングにおいてデータベースで1回または複数回更新された過去の目標物センシング情報が示す予測位置と、新たな目標物センシング情報が示す位置等によって相関が判定される。
【0022】
そして、システム目標管理部23は、データベース25において更新された目標物センシング情報のセンサ識別IDとセンシング識別IDと目標物同一性識別IDを表示部24に通知する。すると、表示部24は、それらセンサ識別IDとセンシング識別IDと目標物同一性識別IDに基づいてデータベース25から目標物センシング情報を読み取り、当該目標物センシング情報の内容に応じて、画面に出力された地図上への目標物を示すシンボルアイコンなどの表示処理を行なう。このとき、シンボルアイコンは、目標物の種別に対応する図柄であり、その他、位置座標、速度、移動方向、種別等の情報がともに表示されるようにしてもよい。
【0023】
以上の処理により、目標相関処理装置は、地上の目標物が移動できる地点における所定時間後の位置座標や速度や移動方向を予測して過去に目標物捕捉センサから取得した目標物センシング情報を更新して、新たに目標物捕捉センサから取得した目標物センシング情報との相関を判定している。したがって、地上目標物に適した目標物相関処理を行なう目標相関処理装置を提供することができる。
【0024】
なお、上述の目標相関処理装置2や目標物捕捉センサは内部に、コンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。
【0025】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0026】
1・・・センサシステム
2・・・目標相関処理装置
11・・・目標物捕捉センサ
20・・・センシング情報受信部
21・・・相関処理部
22・・・移動予測部
23・・・システム目標管理部
24・・・表示部
25・・・データベース
211・・・前処理実行部
212・・・相関見直し処理部
213・・・相関判定処理部
【技術分野】
【0001】
本発明は、複数のセンサで捕らえた目標物を捕捉した際の当該目標物の各センシングデータの相関処理を行うことで複数のセンサで捕らえた1つの目標物のセンシングデータを、一つの目標物の情報として統合する目標相関処理装置、目標相関処理方法及びプログラムに関する。
【背景技術】
【0002】
目標検出のためのセンサを搭載した航空機や、地上基地に設置したレーダ等の各種センサからの目標物の目標情報等を収集し、それら情報を元に目標物の早期発見及び追尾が可能な目標相関処理装置が実用化されている。各種センサからの情報はネットワークを経由して目標相関処理装置まで伝送され、目標相関処理装置では各センサで取得された目標物に関する情報の相関処理を行う。具体的には、重複した情報の統合化や、過去に収集した情報を元に今後の目標物の移動予測を行うといった処理がなされる。
この他、航空管制分野においても、複数レーダで捉えた航空機情報の統合化、断続的にしか得られないレーダ情報を追尾補間し、現在の飛行位置を算定する航空管制システム(目標相関処理装置)が実用化されている。このような技術に関連する特許が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−97900号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したように、現在実用化される目標相関処理装置やそのシステムは空中目標物である航空機や飛翔体に対する処理を想定したものが多い。空中目標物の場合、運動の移動方向や速度には一定の継続性があるため、その挙動については相関処理アルゴリズムとして確立されたものがある。一方、地上目標物の場合、地形や地勢等の影響から車両は前進後退、右左折をしてその挙動は不規則である。従って、地上目標物に適した目標相関処理装置の提供が必要である。
【0005】
そこでこの発明は、地上目標物に適した目標相関処理装置、目標相関処理方法及びプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信部と、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測部と、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理部と、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理部と、を備えることを特徴とする目標相関処理装置である。
【0007】
また本発明は、目標相関処理装置における目標相関処理方法であって、前記目標相関処理装置のセンシング情報受信部が、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信し、前記目標相関処理装置の移動予測部が、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新し、前記目標相関処理装置の相関判定処理部が、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定し、前記目標相関処理装置のシステム目標管理部が、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新することを特徴とする目標相関処理方法である。
【0008】
また本発明は、目標相関処理装置のコンピュータを、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信手段、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測手段、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理手段、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理手段、として機能させることを特徴とするプログラムである。
【発明の効果】
【0009】
本発明によれば、目標相関処理装置は、地上の目標物が移動できる地点における所定時間後の位置座標や速度や移動方向を予測して過去に目標物捕捉センサから取得した目標物センシング情報を更新して、新たに目標物捕捉センサから取得した目標物センシング情報との相関を判定している。したがって、地上目標物に適した目標物相関処理を行なう目標相関処理装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】目標相関処理装置を備えた目標相関処理システムを示す図である。
【図2】目標相関処理装置の機能ブロック図である。
【図3】目標相関処理装置の処理フローを示す図である。
【図4】移動予測処理の概要を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の一実施形態による目標相関処理装置を図面を参照して説明する。
図1は同実施形態による目標相関処理装置を備えた目標相関処理システムを示す図である。
この図において、符号1は複数のセンサを有するセンサシステム、2は目標相関処理装置である。センサシステム1により構成される目標物捕捉センサ11は、例えばレーダであり、電磁波を照射して目標物である地上車両10の目標物捕捉センサ11からの距離や速度等の目標物センシング情報を検出する。また目標相関処理装置1は、通信ネットワークを介してセンサシステム1を構成する各目標物捕捉センサ11と接続されており、目標物捕捉センサ11から目標物センシング情報を受信する。そして目標相関処理装置1は、過去に目標物捕捉センサ11が検出した目標物センシング情報に含まれる目標物の位置や位置、速度、移動方向などを更新する移動予測部22、複数の目標物捕捉センサ11で検出された目標物センシング情報の相関を判定する相関処理部21、目標物センシング情報の相関に基づいて複数の目標物捕捉センサ11で検出された1つの目標物に対応する各目標物センシング情報を対応付けて管理するシステム目標管理部23、目標物の情報を表示する表示部24を備えている。
【0012】
本実施形態による目標相関処理装置2は、目標物捕捉センサ11が検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信する。また、目標相関処理装置2は、目標物センシング情報が示す目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する。そして、目標相関処理装置2は、受信した目標物センシング情報の示す属性に一致し、かつ予測処理により更新された更新後の目標物センシング情報を、データベース(システム目標記憶部)から読み取って、それら受信した目標物センシング情報と更新後の目標物センシング情報とが相関するかを判定し、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
このような処理を行うことにより、目標相関処理装置2は、複数の目標物捕捉センサ11が検出した地上を移動する目標物のセンシング情報うち、相関関係があるか否かの判定の処理を適切に行う。
【0013】
図2は目標相関処理装置の機能ブロック図である。
図3は目標相関処理装置の処理フローを示す図である。
次に、図2,図3を用いて目標相関処理装置の処理フローについて説明する。
図2で示すように、センサシステム1は複数の目標物捕捉センサ11(♯1〜♯n)を備える。そして、目標相関処理装置2は、それら目標物捕捉センサ11(♯1〜♯n)から送信される目標物センシング情報を受信するセンシング情報受信部20の他、相関処理部21、移動予測部22、システム目標管理部23、表示部24、データベース25を備えている。なお相関処理部21は前処理実行部211、相関見直し処理部212、相関判定処理部213の各機能構成を有している。
そして、まず、目標相関処理装置2のセンシング情報受信部20が、各目標物捕捉センサ11より目標物センシング情報を受信する(ステップS101)。この目標物センシング情報には、検出した目標物の位置座標、速度、加速度、移動方向、物体種別、検出時刻、目標物センシング情報を送信した目標物捕捉センサ11を識別するセンサ識別ID、当該目標物センシング情報を識別するためのセンシング識別ID、目標物捕捉センサ11が過去に送信した目標物センシング情報が示す目標物と同一の目標物を検出した場合の目標物センシング情報であるかを示す目標物同一性識別IDなどの情報が格納されている。
【0014】
目標相関処理装置2は目標物センシング情報を受信すると、前処理実行部211がその情報を取得し、破棄判定条件に合致するかを判定する(ステップS102)。破棄判定条件は、
(1)新たに取得した目標物センシング情報に含まれる検出時刻と現在時刻とを比較して破棄判定時間閾値以上の時刻差がある場合には、その目標物センシング情報を破棄する。
(2)新たに取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDの組が、過去に取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDの組と同一である場合には、同一の目標物捕捉センサ11から、同一の目標物センシング情報を取得したものとして、その新たに取得した目標物センシング情報を破棄する。
(3)新たに取得した目標物センシング情報に含まれる各情報のうち、不正値や例外値が含まれているかを判定し、含まれている場合には(例えば、各情報に閾値を設けるなどして判定)、その新たに取得した目標物センシング情報を破棄する(ステップS103)。
そして、前処理実行部211は、破棄判定条件に合致しない目標物センシング情報を相関見直し処理部212へ出力する。
【0015】
相関見直し処理部212は目標物センシング情報を取得すると、その目標物センシング情報がデータベース25に過去に登録された目標物センシング情報の更新用データかを判定する(ステップS104)。例えば、センサ識別IDとセンシング識別IDと目標物同一性識別IDの組が一致する目標物センシング情報が、既にデータベース25に格納されており、かつ、それら目標物センシング情報の示す検出時刻の差が所定の更新判定用の時刻差以内である場合には、新たに取得した目標物センシング情報を更新用データと判定する。そして、相関見直し処理部212は、新たに取得した目標物センシング情報に含まれるセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組と一致する、既にデータベース25に格納されている目標物センシング情報を、当該新たに取得した目標物センシング情報へ更新する(ステップS105)。例えば、相関見直し処理部212は、目標物Aに関するも目標物センシング情報を10時00分に取得し、その3分後の10時03分にセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組合せが同一の目標物Aに関する目標物センシング情報を新たに取得した場合には、3分の時刻差が更新判定用の時刻差以内であると判定し、データベース25に既に登録されている10時00分に登録された目標物センシング情報を、10時03分の目標物センシング情報へ更新する。更新を行なった場合には、その更新に利用した目標物センシング情報の処理は終了する。
【0016】
ここで、データベース25において目標物センシング情報は、主目標情報と副目標情報に分類されて登録される。相関のある目標物センシング情報(つまり、複数の目標物捕捉センサ11において検出された同一の目標物を示す各目標物センシング情報)はデータベース25に対応付けられて登録されている。このとき、目標物センシング情報を検出した目標物捕捉センサ11に与えられる優先順位や検出精度、目標物センシング情報に含まれる距離(目標物捕捉センサ11から目標物までの距離)の何れか一つまたは複数によって特定できる確信度によって、相関のある複数の目標物センシング情報のうち、最も確信度が高い目標物センシング情報が主目標情報とし登録され、他の目標物センシング情報が副目標情報として主目標情報に対応付けられて登録される。
【0017】
また、相関見直し処理部212は、ステップS105の更新の処理が、副目標情報としてデータベース25に登録されている目標物センシング情報を、新たに取得した目標物センシング情報へ更新した処理であったかを判定し(ステップS106)、その場合には、その更新後の副目標情報と、それに対応する主目標情報の各目標物センシング情報の相関の見直しを行う。相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応付けられてデータベース25に登録されている主目標情報を示す目標物センシング情報とをデータベース25から読み取り、相関判定を行う(ステップS108)。この相関判定は、例えば、各目標物センシング情報に含まれる座標位置の距離が所定の距離閾値以内であるかを判定し、距離閾値以内であれば2つの目標物センシング情報は相関すると判定する等の処理により行う。そして、相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報とを「相関有り」と判定した場合には、それら更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報との従属関係を保つため、データベース25においてそのまま対応付けて登録しておく。他方、相関見直し処理部212は、更新した副目標情報を示す目標物センシング情報と、それに対応する主目標情報を示す目標物センシング情報とを「相関無し」と判定した場合には、更新した副目標情報を示す目標物センシング情報について、当該目標物捕捉センサ11より受信した目標物センシング情報の当該受信時刻を基準とする所定の相関判定時間範囲内に、他の目標物捕捉センサ11より目標物センシング情報を受信していないかを判定し、また、相関判定時間範囲内に受信した目標物センシング情報の複数に、相関があるか否かの判定を行なうといった、下記のステップS111,S112の処理を行なう。つまり、この処理によれば、目標物Aに関するとして、主目標情報を示す目標物センシング情報と、副目標情報を示す目標物センシング情報を対応付けて登録している状態において、当該副目標情報を、受信した目標物センシング情報によって更新したとする。その場合、主目標情報と副目標情報とが相関していればそのままの対応関係が保持され、主目標情報と副目標情報が相関しなくなれば、更新した副目標情報を、新たに主目標情報として登録するか、または他の主目標情報を示す目標物センシング情報に対応する副目標情報として登録することとなる。
【0018】
次に、相関判定処理部213は、目標物捕捉センサ11より受信した目標物センシング情報が更新用データでないとステップS104において判定した場合、その目標物センシング情報に格納されているセンサ識別IDとセンシング識別IDと目標物同一性識別IDの組合せが同一の、過去にデータベース25に登録した目標物センシング情報を特定する。そして、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報とを比較し、相関を判定する(ステップS109)。ここで、過去にデータベース25に登録した目標物センシング情報は、移動予測部22によって、当該目標物センシング情報に含まれる座標位置、速度、移動方向などが更新されている(移動予測部22の処理の詳細については後述する)。従って、移動予測部22が目標物の移動予測処理により更新したデータベース25に格納されている目標物センシング情報と、目標物捕捉センサ11より新たに受信した目標物センシング情報との相関が取れなくなっている可能性がある。相関があると相関判定処理部213が判定した場合には、システム目標管理部23が、目標物捕捉センサ11より受信した目標物センシング情報によって、対応するデータベース25に格納されている目標物センシング情報を更新する(ステップS110)。
【0019】
ここで、相関判定処理部213は、更新した目標物センシング情報が副目標情報である場合、当該副目標情報である目標物センシング情報と、それに対応する主目標情報としてデータベース25に登録されている目標物センシング情報との確信度を算出する。そして、主目標情報を示す目標物センシング情報の確信度よりも、副目標情報を示す目標物センシング情報の確信度が大きい場合、相関判定処理部213は、データベース25に登録されている情報について、それまで主目標情報を示していた目標物センシング情報を、副目標情報を示す情報へと変更し、また、それまで副目標情報を示していた目標物センシング情報を、主目標情報を示す情報へと変更する。確信度の算出は、例えば、上述したように、目標物センシング情報を検出した目標物捕捉センサ11に与えられた優先順位や検出精度、目標物センシング情報に含まれる距離(目標物捕捉センサ11から目標物までの距離)の何れか一つまたは複数によって算出する。確信度の算出手法はこれ以外の方法であってもよい。
なお、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報との相関有無の判定は、相関見直し処理部212の相関判定の処理と同様に、例えば、各目標物センシング情報に含まれる座標位置の距離が所定の距離閾値以内であるかを判定し、距離閾値以内であれば2つの目標物センシング情報は相関すると判定する等の処理により行う。
【0020】
次に、相関判定処理部213は、ステップS109の相関判定において、目標物捕捉センサ11より受信した目標物センシング情報と、過去にデータベース25に登録した目標物センシング情報との相関がないと判定した場合、目標物捕捉センサ11より受信した目標物センシング情報の当該受信時刻を基準とする所定の相関判定時間範囲内に、他の目標物捕捉センサ11より目標物センシング情報を受信していないかを判定する(ステップS111)。そして、相関判定時間範囲内に受信した目標物センシング情報の複数に、相関があるか否かの判定を行なう(ステップS112)。相関判定の処理は、ステップS109の処置と同様に行なう。そして、相関判定処理部213は、相関がある複数の相関判定情報を検出した場合には、システム目標管理部23が、それらを一つの目標物について相関する情報として、確信度に基づいて主目標情報と副目標情報とに分類し、対応付けてデータベース25に登録する(ステップS113)。相関判定時間範囲内に受信した目標物センシング情報のいずれにも相関しないと判定した場合には、相関判定処理部213は、目標物捕捉センサ11より受信した目標物センシング情報を新規の目標物に関する主目標情報としてデータベース25に登録する(ステップS114)。
【0021】
図4は移動予測処理の概要を示す図である。
次に、図4を用いて移動予測部22の処理の詳細について説明する。
移動予測部22は、データベース25に登録されている主目標情報または副目標情報として登録されている目標物センシング情報の示す各情報のうち、目標物の移動に関する情報、例えば、位置座標、速度、移動方向などの情報を更新する。
1つの目標物センシング情報の示す目標物の移動予測の処理において、まず、移動予測部22は、データベース25より、対象となる目標物センシング情報の示す現在の位置座標p、速度vまたは初速度v0や加速度a、移動方向(x,y)を読み取る。そして、位置座標pを基点とし、移動方向(x1,y1)を中心とする予測角度範囲2θおよび、t秒間で目標物が移動できる移動距離r(r=vt,r=v0t+(1/2*at2))によって特定できる円弧範囲の、最も進行難度の低い地点を通過する新たな移動方向(x2,y2)と、当該移動方向と円弧との交点である移動予測座標q1を特定する。最も進行難度の低い地点は、例えば道路であればその道路の中央点、または道路でなければ地図データ等から得た難度の低い地点の情報を用いる。または、最も進行難度の低い移動予測座標q1の計算を、地形や地勢等の状況を評価した地理データを外部から取り込み、現在の位置座標から特定した円弧上地点までの車両の移動に要する移動工数(移動の困難さ)を積算し、もっとも移動工数が少ない地点を選択する等の処理を行なって、当該進行難度の低い地点の移動予測座標q1を特定する。また、移動予測座標q1における目標物の速さv1(v1=v0+at,またはa=0の場合はv1=v)を予測処理する。そして、移動予測部22は、データベース25に登録されている予測対象の目標物センシング情報の位置座標p、速度v、移動方向(x,y)等を、t秒後の位置座標q1,速度v1や、移動方向(x2,y2)に書き換える。また移動予測部22は同様の処理によって、次のt秒後の移動予測座標q2を算出して、t秒ごとに順次データベース25に登録されている目標物センシング情報を更新していく(移動予測座標q3〜q5)。なお、更新間隔を示す時間t、予測角度範囲θ、及び円弧上における地点計算の粒度(サンプリング数)等は外部からパラメータにより指定されるようにすればよい。そして、当該更新した目標物センシング情報に対応する新たな目標物センシング情報を受信したタイミングにおいてデータベースで1回または複数回更新された過去の目標物センシング情報が示す予測位置と、新たな目標物センシング情報が示す位置等によって相関が判定される。
【0022】
そして、システム目標管理部23は、データベース25において更新された目標物センシング情報のセンサ識別IDとセンシング識別IDと目標物同一性識別IDを表示部24に通知する。すると、表示部24は、それらセンサ識別IDとセンシング識別IDと目標物同一性識別IDに基づいてデータベース25から目標物センシング情報を読み取り、当該目標物センシング情報の内容に応じて、画面に出力された地図上への目標物を示すシンボルアイコンなどの表示処理を行なう。このとき、シンボルアイコンは、目標物の種別に対応する図柄であり、その他、位置座標、速度、移動方向、種別等の情報がともに表示されるようにしてもよい。
【0023】
以上の処理により、目標相関処理装置は、地上の目標物が移動できる地点における所定時間後の位置座標や速度や移動方向を予測して過去に目標物捕捉センサから取得した目標物センシング情報を更新して、新たに目標物捕捉センサから取得した目標物センシング情報との相関を判定している。したがって、地上目標物に適した目標物相関処理を行なう目標相関処理装置を提供することができる。
【0024】
なお、上述の目標相関処理装置2や目標物捕捉センサは内部に、コンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。
【0025】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0026】
1・・・センサシステム
2・・・目標相関処理装置
11・・・目標物捕捉センサ
20・・・センシング情報受信部
21・・・相関処理部
22・・・移動予測部
23・・・システム目標管理部
24・・・表示部
25・・・データベース
211・・・前処理実行部
212・・・相関見直し処理部
213・・・相関判定処理部
【特許請求の範囲】
【請求項1】
目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信部と、
前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測部と、
前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理部と、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理部と、
を備えることを特徴とする目標相関処理装置。
【請求項2】
前記相関判定処理部は、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関しないと判定した場合には、前記受信した目標物センシング情報の受信時刻を基準とした相関判定時間範囲内に受信した他の目標物センシング情報との相関を判定し、
前記システム目標管理部は、前記受信した目標物センシング情報と、前記受信した他の目標物センシング情報とに相関がある場合には、それらを対応付けて1つの目標物に関する目標物センシング情報として前記システム目標記憶部へ登録し、それら目標物センシング情報に相関がない場合には、前記受信した目標物センシング情報のみを1つの目標物に関する目標物センシング情報としてシステム目標記憶部へ登録する
ことを特徴とする請求項1に記載の目標相関処理装置。
【請求項3】
前記相関判定処理部は、前記受信した目標物センシング情報と、前記受信した他の目標物センシング情報との確信度を算出し、
前記システム目標管理部は、前記確信度の最も高い目標物センシング情報に主目標を示す情報を付与して前記システム目標記憶部へ登録し、前記確信度の最も高い目標物センシング情報以外の目標物センシング情報に副目標を示す情報を付与して前記システム目標記憶部へ登録する
ことを特徴とする請求項2に記載の目標相関処理装置。
【請求項4】
前記システム目標記憶部に登録されている前記主目標を示す前記目標物センシング情報と、それに対応付けられる前記副目標を示す目標物センシング情報の確信度をそれぞれ算出し、前記主目標を示す目標物センシング情報の確信度よりも、前記副目標を示す目標物センシング情報の確信度が大きい場合には、それまで前記主目標を示していた目標物センシング情報を副目標を示す目標物センシング情報へと変更し、それまで前記副目標を示していた目標物センシング情報を主目標を示す目標物センシング情報へと変更する
ことを特徴とする請求項3に記載の目標相関処理装置。
【請求項5】
前記受信した目標物センシング情報が過去に受信した前記システム目標記憶部に登録されている目標物センシング情報の更新用データである場合に、当該受信した目標物センシング情報を用いて前記システム目標記憶部に登録されている目標物センシング情報を更新し、当該更新した目標物センシング情報が前記副目標を示す場合に、当該副目標を示す前記目標物センシング情報と、それに対応する目標物センシング情報が相関するかを判定して、相関しないと判定した場合には、前記更新した副目標を示す目標物センシング情報について、当該副目標に対応する主目標を示す目標物センシングとの前記システム目標記憶部における対応付けを分離して、主目標を示す目標物センシング情報として新たに前記システム目標記憶部へ登録する
ことを特徴とする請求項3または請求項4に記載の目標相関処理装置。
【請求項6】
目標相関処理装置における目標相関処理方法であって、
前記目標相関処理装置のセンシング情報受信部が、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信し、
前記目標相関処理装置の移動予測部が、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新し、
前記目標相関処理装置の相関判定処理部が、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定し、
前記目標相関処理装置のシステム目標管理部が、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新する
ことを特徴とする目標相関処理方法。
【請求項7】
目標相関処理装置のコンピュータを、
目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信手段、
前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測手段、
前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理手段、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理手段、
として機能させることを特徴とするプログラム。
【請求項1】
目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信部と、
前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測部と、
前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理部と、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理部と、
を備えることを特徴とする目標相関処理装置。
【請求項2】
前記相関判定処理部は、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関しないと判定した場合には、前記受信した目標物センシング情報の受信時刻を基準とした相関判定時間範囲内に受信した他の目標物センシング情報との相関を判定し、
前記システム目標管理部は、前記受信した目標物センシング情報と、前記受信した他の目標物センシング情報とに相関がある場合には、それらを対応付けて1つの目標物に関する目標物センシング情報として前記システム目標記憶部へ登録し、それら目標物センシング情報に相関がない場合には、前記受信した目標物センシング情報のみを1つの目標物に関する目標物センシング情報としてシステム目標記憶部へ登録する
ことを特徴とする請求項1に記載の目標相関処理装置。
【請求項3】
前記相関判定処理部は、前記受信した目標物センシング情報と、前記受信した他の目標物センシング情報との確信度を算出し、
前記システム目標管理部は、前記確信度の最も高い目標物センシング情報に主目標を示す情報を付与して前記システム目標記憶部へ登録し、前記確信度の最も高い目標物センシング情報以外の目標物センシング情報に副目標を示す情報を付与して前記システム目標記憶部へ登録する
ことを特徴とする請求項2に記載の目標相関処理装置。
【請求項4】
前記システム目標記憶部に登録されている前記主目標を示す前記目標物センシング情報と、それに対応付けられる前記副目標を示す目標物センシング情報の確信度をそれぞれ算出し、前記主目標を示す目標物センシング情報の確信度よりも、前記副目標を示す目標物センシング情報の確信度が大きい場合には、それまで前記主目標を示していた目標物センシング情報を副目標を示す目標物センシング情報へと変更し、それまで前記副目標を示していた目標物センシング情報を主目標を示す目標物センシング情報へと変更する
ことを特徴とする請求項3に記載の目標相関処理装置。
【請求項5】
前記受信した目標物センシング情報が過去に受信した前記システム目標記憶部に登録されている目標物センシング情報の更新用データである場合に、当該受信した目標物センシング情報を用いて前記システム目標記憶部に登録されている目標物センシング情報を更新し、当該更新した目標物センシング情報が前記副目標を示す場合に、当該副目標を示す前記目標物センシング情報と、それに対応する目標物センシング情報が相関するかを判定して、相関しないと判定した場合には、前記更新した副目標を示す目標物センシング情報について、当該副目標に対応する主目標を示す目標物センシングとの前記システム目標記憶部における対応付けを分離して、主目標を示す目標物センシング情報として新たに前記システム目標記憶部へ登録する
ことを特徴とする請求項3または請求項4に記載の目標相関処理装置。
【請求項6】
目標相関処理装置における目標相関処理方法であって、
前記目標相関処理装置のセンシング情報受信部が、目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信し、
前記目標相関処理装置の移動予測部が、前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新し、
前記目標相関処理装置の相関判定処理部が、前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定し、
前記目標相関処理装置のシステム目標管理部が、前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新する
ことを特徴とする目標相関処理方法。
【請求項7】
目標相関処理装置のコンピュータを、
目標物捕捉センサが検出した目標物の位置と、移動方向と、速度または加速度の少なくとも一方と、を少なくとも含む目標物センシング情報を受信するセンシング情報受信手段、
前記目標物センシング情報が示す前記目標物の位置と、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向と、速度または加速度の少なくとも一方と、を少なくとも用いて、所定時間経過毎の前記目標物センシング情報が示す前記目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、システム目標記憶部に登録されている過去に受信した目標物センシング情報を更新する移動予測手段、
前記受信した目標物センシング情報の示す属性に一致し、かつ前記予測処理により更新された更新後の目標物センシング情報を、前記システム目標記憶部から読み取って、それら前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関するかを判定する相関判定処理手段、
前記受信した目標物センシング情報と前記更新後の目標物センシング情報とが相関すると判定した場合には、前記更新後の目標物センシング情報を前記受信した目標物センシング情報に再更新するシステム目標管理手段、
として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−123027(P2011−123027A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−283220(P2009−283220)
【出願日】平成21年12月14日(2009.12.14)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月14日(2009.12.14)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]