
目標表示装置
【課題】目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供する。
【解決手段】目標の誤差範囲境界線の倍率を設定する操作部1aと、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部2aと、制御部で算出された目標の誤差範囲境界線を表示する表示部3を備える。
【解決手段】目標の誤差範囲境界線の倍率を設定する操作部1aと、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部2aと、制御部で算出された目標の誤差範囲境界線を表示する表示部3を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置等の表示器として用いられて目標位置を表示する目標表示装置に関する。
【背景技術】
【0002】
従来、レーダ装置に適用されて目標に関する各種情報を操作員へ伝達する目標表示装置が知られている。この目標表示装置は、例えば非特許文献1に示されているように、レーダビデオ信号を表示ビデオ信号に変換して表示する機能や、航跡処理装置等によってデータ処理された結果を表示する機能を備えている。
【0003】
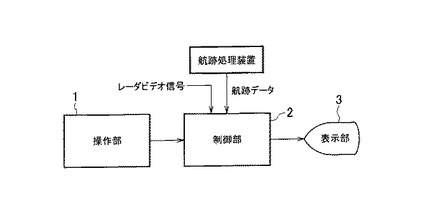
図11は、従来の目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1、制御部2および表示部3を備えている。操作部1は、操作員の操作を受け付けて操作に応じた制御信号を生成し、制御部2に送る。制御部2は、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1から送られてくる制御信号に基づいて処理し、表示信号として表示部3に送る。表示部3は、制御部2から送られてくる表示信号に基づき各種情報を表示する。
【0004】
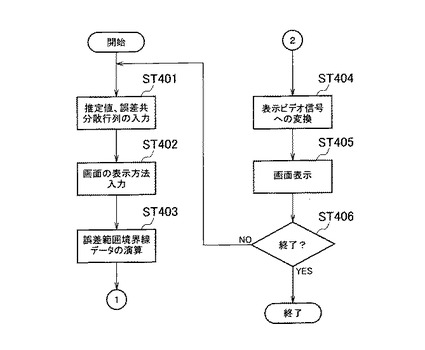
次に、上記のように構成された従来の目標表示装置の動作を説明する。図12は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST401)。すなわち、制御部2は、航跡処理装置等から目標の推定値と、この推定値の誤差を示す誤差共分散行列を入力する。次いで、画面の表示方法が入力される(ステップST402)。すなわち、操作部1から画面の表示方法に関する情報が入力される。この操作部1から入力された画面の表示方法に関する情報は、制御部2に送られる。
【0005】
次いで、誤差範囲境界線データの演算が行われる(ステップST403)。すなわち、制御部2は、誤差共分散行列から誤差範囲境界線データを算出する。次いで、表示ビデオ信号への変換が行われる(ステップST404)。すなわち、制御部2は、ステップST401で入力された推定値によって示される目標の推定位置データやステップST403で演算することにより得られた誤差範囲境界線データを、ステップST402で入力された画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0006】
次いで、画面表示が行われる(ステップST405)。すなわち、制御部2は、ステップST404で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の画面に画像が表示される。次いで、処理が終了であるかどうかが調べられる(ステップST406)。ステップST406において、処理が終了でないことが判断されると、ステップST401に戻り上述した処理が繰り返される。一方、ステップST406において、終了であることが判断されると、目標表示処理は終了する。
【0007】
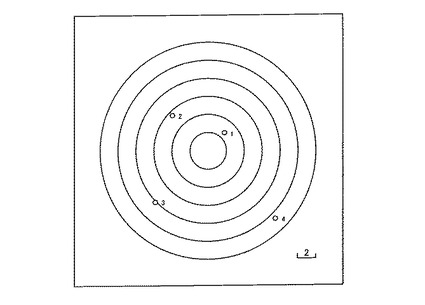
図13は、画面の表示方法としてPPI(Plan Position Indicator)表示が指定された場合の目標表示装置における表示例を示す図である。ここで、目標表示装置に表示される目標位置(図13中の○印)は、誤差を含んでおり、航跡処理装置から平滑値や予測値とともに、平滑誤差共分散行列や予測誤差共分散行列が入力される場合、これらに基づき誤差範囲境界線を表示することにより、操作員は、目標の位置精度に関する詳細な情報を得ることができる。
【0008】
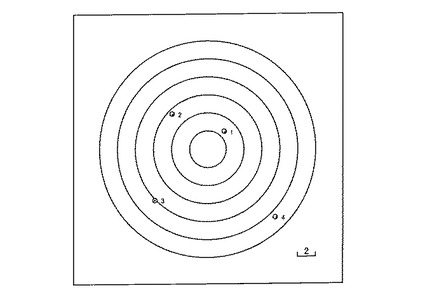
しかしながら、レーダ装置の全捜索範囲を表示する場合、誤差範囲境界線によって示される誤差範囲は、表示範囲と比較して小さいため、図14に示すように、各目標の誤差範囲(図14中の○印の中の黒点のように見えるもの)を視認可能に示すことは困難である。
【0009】
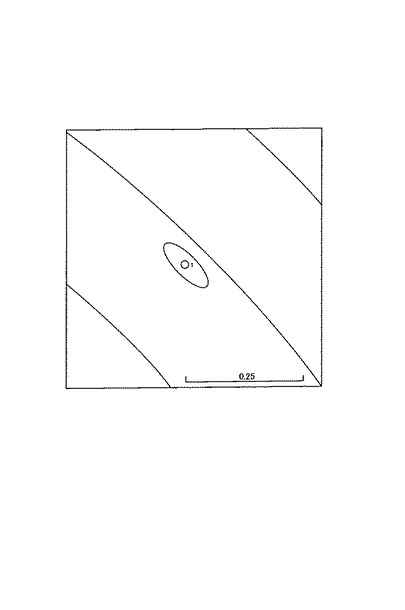
特許文献1の従来の技術の欄には、目標観測位置の他に、目標予測位置と目標予測存在範囲境界線を表示する評価装置が示されている。従来の目標表示装置は、表示する距離範囲を切り替えるレンジ切り替え機能、画面の中心に表示する位置を指定し、この指定した位置を中心として表示を行なうオフセンタ表示機能および指定した位置を中心として表示範囲を拡大するズーム表示機能を有し、これらの機能を用いることにより、特許文献1の従来の技術の欄で説明されている表示を行なうことができる。図15は、ズーム表示機能による表示例を示し、○印で示す目標の周囲の楕円が誤差範囲境界線を表している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】実開平5−19979号公報
【非特許文献】
【0011】
【非特許文献1】吉田孝監修、改訂 レーダ技術、電子情報通信学会、1996,pp.192−201
【発明の概要】
【発明が解決しようとする課題】
【0012】
上述したように、従来の目標表示装置では、操作員が、目標の位置精度に関する詳細な情報を得るために、誤差範囲境界線を表示させても、レーダ装置の全捜索範囲を表示している場合は、誤差範囲境界線で示される誤差は、表示範囲と比較して小さいため、各目標の誤差範囲を視認可能に示すことは困難であるという問題がある。
【0013】
また、特定の位置や目標に関して、目標の位置精度に関する詳細な情報を得る方法として、レンジ切り替え機能、オフセンタ表示機能またはズーム表示機能を用いた場合、レーダ装置の捜索範囲の全体状況を確認できなくなるとともに、別の位置にある目標の位置精度に関する詳細な情報を同時に得ることができなくなるという問題がある。
【0014】
さらに、操作員が、移動する目標の位置精度に関する詳細な情報を得ようとする場合、オフセンタ表示やズーム表示した画面外に目標が移動した場合は、通常表示(オフセンタ表示やズーム表示ではない表示)に戻して、位置を指定した後、再度オフセンタ表示やズーム表示に切り替える必要があり、煩雑な操作が必要になるという問題がある。
【0015】
本発明の課題は、目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供することにある。
【課題を解決するための手段】
【0016】
上記課題を解決するために、第1の発明は、目標の誤差範囲境界線の倍率を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を表示する表示部を備える。
【0017】
また、第2の発明は、主画面と副画面とを同一画面上に表示する目標表示装置であって、副画面に表示する主画面上の位置または目標を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を副画面に表示する表示部を備える。
【0018】
第3の発明は、複数の画面を有する目標表示装置であって、複数の画面の中の特定画面に表示させる他の画面上の位置または目標を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を特定画面に表示する表示部を備える。
【発明の効果】
【0019】
第1の発明によれば、外部から入力される目標の推定値および誤差共分散行列と、設定された倍率とに基づき、目標の誤差範囲境界線を算出して表示するので、目標の位置精度に関する認識性を向上させる目標表示装置を提供することができる。
【0020】
第2の発明によれば、主画面と副画面とを有し、外部から入力される目標の推定値および誤差共分散行列と、副画面に表示する主画面上の設定された位置または目標とに基づき、目標の誤差範囲境界線を算出して表示するので、操作員は、レーダ装置の捜索範囲の全体状況を主画面で確認しながら、副画面を見ることにより、自ら設定した主画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。その結果、目標の位置表示に関わる操作性を向上させることができる。
【0021】
第3の発明によれば、複数の画面を有し、外部から入力される目標の推定値および誤差共分散行列と、特定画面に表示させる他の画面上の設定された位置または目標とに基づき、目標の誤差範囲境界線を算出して表示するので、他の画面でレーダ装置の捜索範囲の全体状況を確認しながら、特定画面を見ることにより、自ら設定した他の画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。その結果、目標の位置表示に関わる操作性を向上させることができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施例1に係る目標表示装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図3】本発明の実施例1に係る目標表示装置における表示例を示す図である。
【図4】本発明の実施例2に係る目標表示装置の構成を示すブロック図である。
【図5】本発明の実施例2に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図6】本発明の実施例2に係る目標表示装置における表示例を示す図である。
【図7】本発明の実施例3に係る目標表示装置における表示例を示す図である。
【図8】本発明の実施例3に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図9】本発明の実施例3に係る目標表示装置における表示例を示す図である。
【図10】本発明の実施例3に係る目標表示装置の他の表示例を示す図である。
【図11】従来の目標表示装置の構成を示すブロック図である。
【図12】従来の目標表示装置で実行される目標表示処理を示すフローチャートである。
【図13】従来の目標表示装置で表示部への表示方法としてPPI表示が指定された場合の表示例を示す図である。
【図14】従来の目標表示装置における表示例(誤差範囲境界線あり、通常表示)を示す図である。
【図15】従来の目標表示装置における表示例(誤差範囲境界線あり、ズーム表示)を示す図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。なお、以下においては、背景技術の欄で説明した構成部分に相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0024】
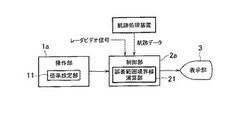
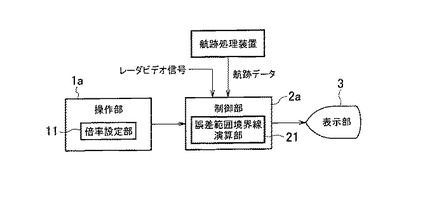
図1は、本発明の実施例1に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1a、制御部2aおよび表示部3を備えている。操作部1aは、背景技術の欄で説明した従来の目標表示装置の操作部1に、倍率設定部11が付加されて構成されている。倍率設定部11は、誤差範囲境界線の倍率を設定する。倍率設定部11で設定された倍率は、制御部2aに送られる。
【0025】
制御部2aは、背景技術の欄で説明した従来の目標表示装置の制御部2に、誤差範囲境界線演算部21が付加されて構成されている。誤差範囲境界線演算部21は、操作部1aの倍率設定部11で設定された倍率kにしたがって、誤差範囲境界線をk倍する演算を実行する。制御部2aは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1aから送られてくる制御信号に基づいて処理し、表示信号として表示部3に送る。
【0026】
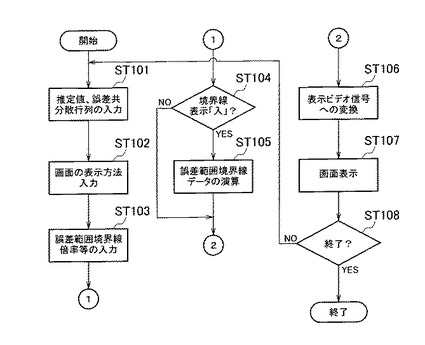
次に、上記のように構成された実施例1に係る目標表示装置の動作を説明する。図2は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST101)。すなわち、制御部2aは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0027】
次いで、画面の表示方法が入力される(ステップST102)。すなわち、操作員の操作に応じて、操作部1aから画面の表示方法に関する情報が入力される。操作部1aから入力された画面の表示方法に関する情報は、制御部2aに送られる。次いで、誤差範囲境界線倍率等が入力される(ステップST103)。すなわち、操作員の操作に応じて、操作部1aの倍率設定部11から誤差範囲境界線の倍率が入力されるとともに、操作部1aから誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2aに送られる。
【0028】
次いで、境界線表示が「入」であるかどうかが調べられる(ステップST104)。すなわち、制御部2aは、ステップST103で入力された誤差範囲境界線の表示入/切に関する情報が、「入」を示しているかどうかを調べる。ステップST104において、「入」でないことが判断されると、シーケンスはステップST106に進む。
【0029】
一方、ステップST104において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST105)。すなわち、制御部2aの誤差範囲境界線演算部21は、ステップST103において入力された倍率と、ステップST101において入力された目標の推定値および誤差共分散行列とに基づいて、誤差範囲境界線の表示データを演算により求める。
【0030】
ここで、目標の2次元直交座標の推定値ベクトルXを[px,py,vx,vy]T、誤差共分散行列PをE[(X−E[X])(X−E[X])T]とする。px,py,vx,vyは、それぞれ、x軸の位置、y軸の位置、x軸の速度、y軸の速度であり、ATは、ベクトルAまたは行列Aの転置、E[・]は、期待値を示す。また、以下に示すP(1,1)、P(2,2)、P(1,2)は、それぞれ、x軸の位置誤差の分散、y軸の位置誤差の分散、x軸とy軸の位置誤差の分散に対応する。
【0031】
2次元直交座標の推定値ベクトルXおよび誤差共分散行列Pに対する誤差範囲境界線データは、推定値ベクトルXの位置成分px、pyを中心とする楕円として計算され、操作部1aで設定された誤差範囲境界線の倍率をkとすると、以下の(1)〜(5)式で表される。
【0032】

ここで、thは、誤差範囲境界線の閾値であり、制御部2aに予め設定された値を用いるほか、外部または操作部1aから入力するように構成することができる。また、操作部1aから閾値パラメータとして、観測値がゲート内に入る確率(下側確率)plまたは観測値がゲート内に入らない確率(上側確率)puを入力し、制御部2aで、カイ二乗分布の逆関数から閾値th(=f−1(閾値パラメータ,自由度)=f−1(下側確率plまたは上側確率pu,2))を算出するように構成することができる。上述した演算が終了すると、シーケンスはステップST106に進む。
【0033】
ステップST106においては、表示ビデオ信号への変換が行われる。すなわち、制御部2aは、目標の推定位置データやステップST105で得られた誤差範囲境界線の表示データ[ex(i),ey(i)]を、ステップST102で入力された画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0034】
次いで、画面表示が行われる(ステップST107)。すなわち、制御部2aは、ステップST106で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の画面に表示が行われる。次いで、終了であるかどうかが調べられる(ステップST108)。ステップST108において、終了でないことが判断されると、ステップST101に戻り上述した処理が繰り返される。一方、ステップST108において、終了であることが判断されると、目標表示処理は終了する。
【0035】
なお、上述した例では、誤差範囲境界線の表示データを点データとして与える場合について説明したが、線分データ[ex(i),ey(i),ex(i+1),ey(i+1)]として、与えるように構成することもできる。
【0036】
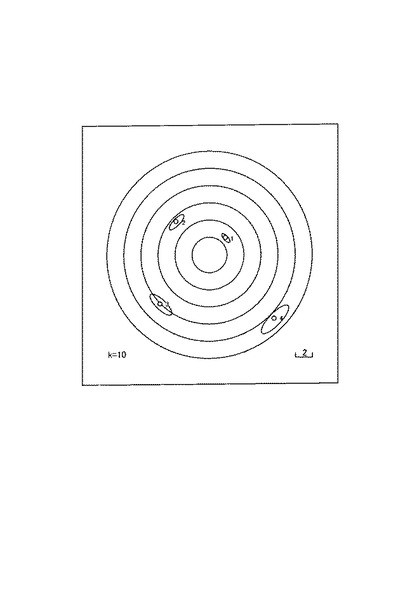
図3は、画面の表示方法としてPPI表示が指定された場合の目標表示装置における表示例を示す図である。ここで、○印は、各目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、各目標の平滑誤差範囲境界線を示す。
【0037】
以上説明したように、本発明の実施例1に係る目標表示装置によれば、図13に示した従来の目標表示装置においては、各目標の誤差範囲を視認可能に示すことができなかったが、図3に示すように、これを改善することができ、操作員は、目標の位置精度に関する詳細な情報を得ることができる。
【0038】
なお、制御部2aは、操作部1aの倍率設定部11で設定された倍率に応じて、誤差範囲境界線の線種または色の少なくとも1つを変化させるように構成できる。また、制御部2aは、操作部1aの倍率設定部11で設定された倍率を表示部3の画面上に表示させるように構成することもできる。さらに、これらの構成のうちの1つのみ、または、両方を備えるように構成することもできる。
【実施例2】
【0039】
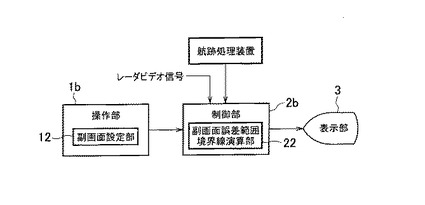
図4は、本発明の実施例2に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1b、制御部2bおよび表示部3を備えている。操作部1bは、背景技術の欄で説明した従来の目標表示装置の操作部1に、副画面設定部12が付加されて構成されている。副画面設定部12は、副画面(の中心)に表示する主画面上の位置または目標を設定する。副画面設定部12で設定された内容は、制御部2bに送られる。
【0040】
制御部2bは、背景技術の欄で説明した従来の目標表示装置の制御部2に、副画面誤差範囲境界線演算部22が付加されて構成されている。副画面誤差範囲境界線演算部22は、操作部1bの副画面設定部12で設定された位置または目標に基づいて、誤差範囲境界線を演算により求め、また、主画面および副画面を同一画面に表示するための処理を実行する。制御部2bは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1bから入力される制御信号に基づいて処理し、表示信号として表示部3に送る。
【0041】
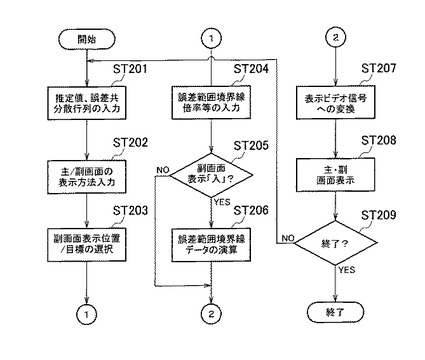
次に、上記のように構成された実施例2に係る目標表示装置の動作を説明する。図5は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST201)。すなわち、制御部2bは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0042】
次いで、主/副画面の表示方法が入力される(ステップST202)。すなわち、操作員の操作に応じて、操作部1bから主画面および副画面の表示方法に関する情報が入力される。操作部1bから入力された主画面および副画面の表示方法に関する情報は、制御部2bに送られる。
【0043】
次いで、副画面表示位置/目標の選択が行われる(ステップST203)。すなわち、操作員の操作に応じて、操作部1bの副画面設定部12から副画面(の中心)に表示する主画面上の位置または目標に関する情報が入力される。操作部1bの副画面設定部12から入力された位置または目標に関する情報は、制御部2bに送られる。
【0044】
次いで、誤差範囲境界線倍率等が入力される(ステップST204)。すなわち、操作員の操作に応じて、操作部1bから誤差範囲境界線の倍率が入力されるとともに、誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2bに送られる。
【0045】
次いで、副画面表示が「入」であるかどうかが調べられる(ステップST205)。すなわち、制御部2bは、ステップST203で入力された誤差範囲境界線の表示入/切に関する情報が、副画面表示の「入」を示しているかどうかを調べる。ステップST205において、「入」でないことが判断されると、シーケンスはステップST207に進む。
【0046】
一方、ステップST205において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST206)。すなわち、制御部2bの副画面誤差範囲境界線演算部22は、ステップST204において入力された誤差範囲境界線の倍率、ステップST203において操作部1bの副画面設定部12から入力された位置または目標に関する情報、ならびに、ステップST201において入力された目標の推定値および誤差共分散行列に基づいて、誤差範囲境界線の表示データを演算により求める。この演算は、上述した実施例1に係る目標表示装置で行われる演算と同様である。その後、シーケンスはステップST207に進む。
【0047】
ステップST207においては、表示ビデオ信号への変換が行われる。すなわち、制御部2bは、目標の推定位置データやステップST206で演算により得られた誤差範囲境界線の表示データ[ex(i),ey(i)]を、ステップST202で入力された主画面および副画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0048】
次いで、主・副画面表示が行われる(ステップST208)。すなわち、制御部2bは、ステップST207で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の主画面および副画面に画像が表示される。次いで、終了であるかどうかが調べられる(ステップST209)。ステップST209において、終了でないことが判断されると、ステップST201に戻り上述した処理が繰り返される。一方、ステップST209において、終了であることが判断されると、目標表示処理は終了する。
【0049】
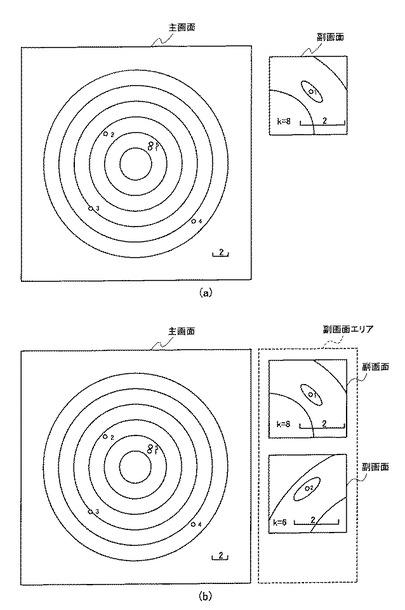
図6(a)は、画面の表示方法としてPPI表示が指定された場合の目標表示装置における表示例を示す図である。ここで、主画面および副画面に表示された○印は、各目標の平滑位置を示し、副画面に表示された○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。
【0050】
なお、副画面(の中心)に表示する位置または目標が2以上設定された場合、図6(b)に示すように、副画面エリアの画面の分割数を自動的に増やして、分割された画面の各々に、設定された2以上の位置または目標をそれぞれ表示するように構成できる。この構成によれば、複数目標の位置精度に関する詳細な情報を得ることができる。
【0051】
以上説明したように、実施例2に係る目標表示装置によれば、操作員は、レーダ装置の捜索範囲の全体状況を主画面で確認しながら、従来のズーム表示と同様に、副画面を見ることにより、自ら設定した主画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。
【0052】
なお、上述した実施例2に係る目標表示装置では、操作部1bから副画面に表示する対象として目標が設定された場合、目標の位置を略中心に、副画面に表示を行うように構成することができる。これにより、目標が移動しても、煩雑な操作を行なうことなく、設定した目標の位置精度および目標近傍の状況を継続的に表示することができる。
【0053】
また、実施例2に係る目標表示装置では、副画面にのみ、誤差範囲境界線を表示するように構成したが、誤差範囲境界線は、実施例1と同様に、主画面にも表示するように構成し、副画面とは独立に、誤差範囲境界線の倍率を変化させるように構成することができる。
【実施例3】
【0054】
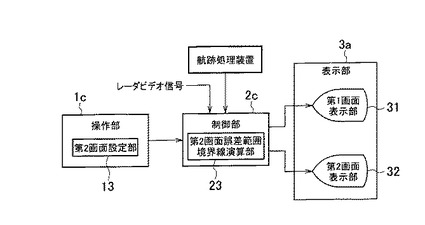
図7は、本発明の実施例3に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1c、制御部2cおよび表示部3aを備えており、表示部3aは、第1画面を表示する第1画面表示部31と第2画面を表示する第2画面表示部32とから構成されている。第1画面は本発明の他の画面に対応し、第2画面は本発明の特定画面に対応する。
【0055】
操作部1bは、背景技術の欄で説明した従来の目標表示装置の操作部1に、第2画面設定部13が付加されて構成されている。第2画面設定部13は、第2画面表示部32(の中心)に表示する第1画面上の位置または目標を設定する。第2画面設定部13で設定された位置または目標は、制御部2cに送られる。
【0056】
制御部2cは、背景技術の欄で説明した従来の目標表示装置の制御部2に、第2画面誤差範囲境界線演算部23が付加されて構成されている。第2画面誤差範囲境界線演算部23は、操作部1cの第2画面設定部13で設定された位置または目標に基づいて、誤差範囲境界線を演算により求め、また、第2画面表示部32に表示する第2画面を生成する処理を実行する。制御部2cは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1cから入力される制御信号に基づいて処理し、表示信号として表示部3aに送る。
【0057】
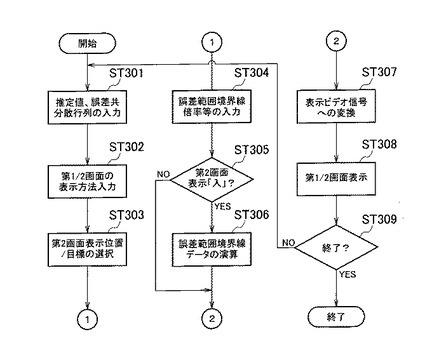
次に、上記のように構成された実施例3に係る目標表示装置の動作を説明する。図8は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST301)。すなわち、制御部2cは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0058】
次いで、第1画面/第2画面の表示方法が入力される(ステップST302)。すなわち、操作員の操作に応じて、操作部1cから第1画面表示部31および第2画面表示部32の画面の表示方法に関する情報が入力される。操作部1cから入力された画面の表示方法に関する情報は、制御部2cに送られる。
【0059】
次いで、第2画面表示位置/目標の選択が行われる(ステップST303)。すなわち、操作員の操作に応じて、操作部1cの第2画面設定部13から、第2画面表示部32(の中心)に表示する第1画面表示部31上の位置または目標に関する情報が入力される。操作部1cから入力された位置または目標に関する情報は、制御部2cに送られる。
【0060】
次いで、誤差範囲境界線倍率等が入力される(ステップST304)。すなわち、操作員の操作に応じて、操作部1cから誤差範囲境界線の倍率に関する情報が入力されるとともに、誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2cに送られる。
【0061】
次いで、第2画面表示が「入」であるかどうかが調べられる(ステップST305)。すなわち、制御部2cは、ステップST303で入力された誤差範囲境界線の表示入/切に関する情報が、第2画面表示の「入」を示しているかどうかを調べる。ステップST305において、「入」でないことが判断されると、シーケンスはステップST307に進む。
【0062】
一方、ステップST305において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST306)。すなわち、制御部2cの第2画面誤差範囲境界線演算部23は、ステップST304において入力された誤差範囲境界線の倍率、ステップST303において第2画面設定部13から入力された位置または目標に関する情報、ならびに、ステップST301において入力された目標の推定値および誤差共分散行列に基づいて、誤差範囲境界線データを演算により算出する。この演算は、上述した実施例1に係る目標表示装置で行われる演算と同様である。その後、シーケンスはステップST307に進む。
【0063】
ステップST307においては、表示ビデオ信号への変換が行われる。すなわち、制御部2cは、目標の推定位置データやステップST306における演算により得られた誤差範囲境界線データ[ex(i),ey(i)]を、ステップST302で入力された第1画面/第2画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0064】
次いで、第1画面/第2画面表示が行われる(ステップST308)。すなわち、制御部2cは、ステップST307で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3aの第1画面表示部31および第2画面表示部32に画像が表示される。次いで、終了であるかどうかが調べられる(ステップST309)。ステップST309において、終了でないことが判断されると、ステップST301に戻り上述した処理が繰り返される。一方、ステップST309において、終了であることが判断されると、目標表示処理は終了する。
【0065】
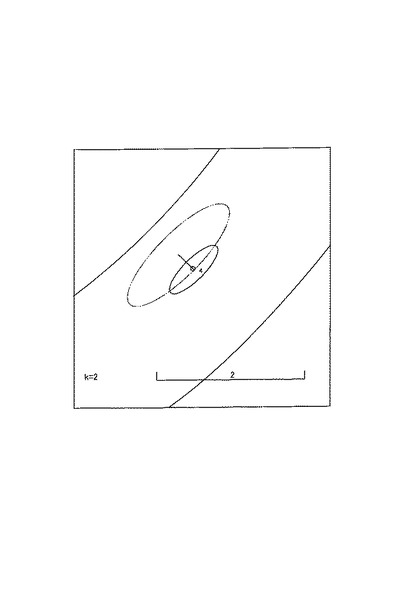
図9は、画面の表示方法としてPPI表示が指定された場合の目標表示装置の第2表示画面部32における表示例を示す図である。ここで、○印は、目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。また、○印から伸びる実線で描かれた直線は、現在の平滑位置と次回観測時の予測位置を結んでおり、次回観測時の予測位置を中心に点線で描かれた楕円は、次回の観測時に相関が取れる範囲を表す残差誤差範囲境界線(特許文献1に示された目標予測存在範囲境界線に対応)を示している。
【0066】
以上説明したように、実施例2に係る目標表示装置によれば、操作員は、第1画面表示部31でレーダ装置の捜索範囲の全体状況を確認しながら、従来のズーム表示と同様に、第2画面表示部32を見ることにより、自ら設定した第1画面表示部31の画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。
【0067】
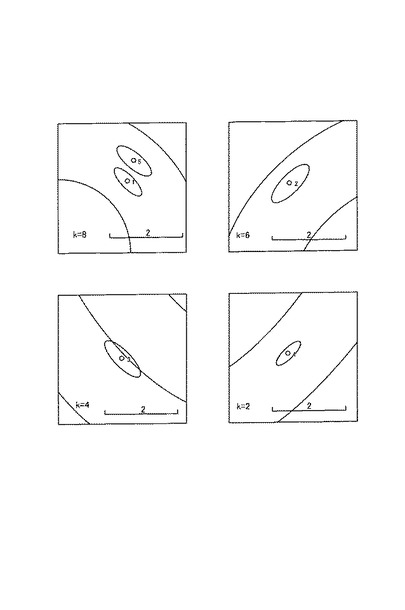
なお、第2画面表示部32(の中心)に表示する位置または目標が2以上設定された場合、図10に示すように、第2画面表示部32の画面の分割数を自動的に増やして、分割された画面の各々に、設定された2以上の位置または目標をそれぞれ表示するように構成できる。図10に示す各画面の○印は、目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。この構成によれば、複数目標の位置精度に関する詳細な情報を得ることができる。
【0068】
また、実施例3に係る目標表示装置では、表示部3aを2つの画面表示部で構成した例を示したが、表示部3aとしては、2つ以上の画面表示部で構成することもできる。
【0069】
また、上述した実施例1〜実施例3に係る目標表示装置においては、制御部は、誤差範囲境界線として、平滑値または予測値と観測誤差共分散行列から算出される観測誤差範囲境界線、平滑値と平滑誤差共分散行列から算出される平滑誤差範囲境界線、予測値と予測誤差共分散行列から算出される予測誤差範囲境界線、予測値と残差共分散行列から算出される残差誤差範囲境界線の少なくとも1つを選択して表示させるように構成できる。この場合、誤差範囲境界線毎に線種および色の少なくとも1つを変化させるように構成できる。
【産業上の利用可能性】
【0070】
本発明は、レーダ装置やソナー装置などの目標表示装置として利用可能である。
【符号の説明】
【0071】
1、1a、1b、1c 操作部
2、2a、2b、2c 制御部
3、3a 表示部
31 第1画面表示部
32 第2画面表示部
11 倍率設定部
12 副画面設定部
13 第2画面設定部
21 誤差範囲境界線演算部
22 副画面誤差範囲境界線演算部
23 第2画面誤差範囲境界線演算部
【技術分野】
【0001】
本発明は、レーダ装置等の表示器として用いられて目標位置を表示する目標表示装置に関する。
【背景技術】
【0002】
従来、レーダ装置に適用されて目標に関する各種情報を操作員へ伝達する目標表示装置が知られている。この目標表示装置は、例えば非特許文献1に示されているように、レーダビデオ信号を表示ビデオ信号に変換して表示する機能や、航跡処理装置等によってデータ処理された結果を表示する機能を備えている。
【0003】
図11は、従来の目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1、制御部2および表示部3を備えている。操作部1は、操作員の操作を受け付けて操作に応じた制御信号を生成し、制御部2に送る。制御部2は、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1から送られてくる制御信号に基づいて処理し、表示信号として表示部3に送る。表示部3は、制御部2から送られてくる表示信号に基づき各種情報を表示する。
【0004】
次に、上記のように構成された従来の目標表示装置の動作を説明する。図12は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST401)。すなわち、制御部2は、航跡処理装置等から目標の推定値と、この推定値の誤差を示す誤差共分散行列を入力する。次いで、画面の表示方法が入力される(ステップST402)。すなわち、操作部1から画面の表示方法に関する情報が入力される。この操作部1から入力された画面の表示方法に関する情報は、制御部2に送られる。
【0005】
次いで、誤差範囲境界線データの演算が行われる(ステップST403)。すなわち、制御部2は、誤差共分散行列から誤差範囲境界線データを算出する。次いで、表示ビデオ信号への変換が行われる(ステップST404)。すなわち、制御部2は、ステップST401で入力された推定値によって示される目標の推定位置データやステップST403で演算することにより得られた誤差範囲境界線データを、ステップST402で入力された画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0006】
次いで、画面表示が行われる(ステップST405)。すなわち、制御部2は、ステップST404で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の画面に画像が表示される。次いで、処理が終了であるかどうかが調べられる(ステップST406)。ステップST406において、処理が終了でないことが判断されると、ステップST401に戻り上述した処理が繰り返される。一方、ステップST406において、終了であることが判断されると、目標表示処理は終了する。
【0007】
図13は、画面の表示方法としてPPI(Plan Position Indicator)表示が指定された場合の目標表示装置における表示例を示す図である。ここで、目標表示装置に表示される目標位置(図13中の○印)は、誤差を含んでおり、航跡処理装置から平滑値や予測値とともに、平滑誤差共分散行列や予測誤差共分散行列が入力される場合、これらに基づき誤差範囲境界線を表示することにより、操作員は、目標の位置精度に関する詳細な情報を得ることができる。
【0008】
しかしながら、レーダ装置の全捜索範囲を表示する場合、誤差範囲境界線によって示される誤差範囲は、表示範囲と比較して小さいため、図14に示すように、各目標の誤差範囲(図14中の○印の中の黒点のように見えるもの)を視認可能に示すことは困難である。
【0009】
特許文献1の従来の技術の欄には、目標観測位置の他に、目標予測位置と目標予測存在範囲境界線を表示する評価装置が示されている。従来の目標表示装置は、表示する距離範囲を切り替えるレンジ切り替え機能、画面の中心に表示する位置を指定し、この指定した位置を中心として表示を行なうオフセンタ表示機能および指定した位置を中心として表示範囲を拡大するズーム表示機能を有し、これらの機能を用いることにより、特許文献1の従来の技術の欄で説明されている表示を行なうことができる。図15は、ズーム表示機能による表示例を示し、○印で示す目標の周囲の楕円が誤差範囲境界線を表している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】実開平5−19979号公報
【非特許文献】
【0011】
【非特許文献1】吉田孝監修、改訂 レーダ技術、電子情報通信学会、1996,pp.192−201
【発明の概要】
【発明が解決しようとする課題】
【0012】
上述したように、従来の目標表示装置では、操作員が、目標の位置精度に関する詳細な情報を得るために、誤差範囲境界線を表示させても、レーダ装置の全捜索範囲を表示している場合は、誤差範囲境界線で示される誤差は、表示範囲と比較して小さいため、各目標の誤差範囲を視認可能に示すことは困難であるという問題がある。
【0013】
また、特定の位置や目標に関して、目標の位置精度に関する詳細な情報を得る方法として、レンジ切り替え機能、オフセンタ表示機能またはズーム表示機能を用いた場合、レーダ装置の捜索範囲の全体状況を確認できなくなるとともに、別の位置にある目標の位置精度に関する詳細な情報を同時に得ることができなくなるという問題がある。
【0014】
さらに、操作員が、移動する目標の位置精度に関する詳細な情報を得ようとする場合、オフセンタ表示やズーム表示した画面外に目標が移動した場合は、通常表示(オフセンタ表示やズーム表示ではない表示)に戻して、位置を指定した後、再度オフセンタ表示やズーム表示に切り替える必要があり、煩雑な操作が必要になるという問題がある。
【0015】
本発明の課題は、目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供することにある。
【課題を解決するための手段】
【0016】
上記課題を解決するために、第1の発明は、目標の誤差範囲境界線の倍率を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を表示する表示部を備える。
【0017】
また、第2の発明は、主画面と副画面とを同一画面上に表示する目標表示装置であって、副画面に表示する主画面上の位置または目標を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を副画面に表示する表示部を備える。
【0018】
第3の発明は、複数の画面を有する目標表示装置であって、複数の画面の中の特定画面に表示させる他の画面上の位置または目標を設定する操作部と、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、制御部で算出された目標の誤差範囲境界線を特定画面に表示する表示部を備える。
【発明の効果】
【0019】
第1の発明によれば、外部から入力される目標の推定値および誤差共分散行列と、設定された倍率とに基づき、目標の誤差範囲境界線を算出して表示するので、目標の位置精度に関する認識性を向上させる目標表示装置を提供することができる。
【0020】
第2の発明によれば、主画面と副画面とを有し、外部から入力される目標の推定値および誤差共分散行列と、副画面に表示する主画面上の設定された位置または目標とに基づき、目標の誤差範囲境界線を算出して表示するので、操作員は、レーダ装置の捜索範囲の全体状況を主画面で確認しながら、副画面を見ることにより、自ら設定した主画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。その結果、目標の位置表示に関わる操作性を向上させることができる。
【0021】
第3の発明によれば、複数の画面を有し、外部から入力される目標の推定値および誤差共分散行列と、特定画面に表示させる他の画面上の設定された位置または目標とに基づき、目標の誤差範囲境界線を算出して表示するので、他の画面でレーダ装置の捜索範囲の全体状況を確認しながら、特定画面を見ることにより、自ら設定した他の画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。その結果、目標の位置表示に関わる操作性を向上させることができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施例1に係る目標表示装置の構成を示すブロック図である。
【図2】本発明の実施例1に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図3】本発明の実施例1に係る目標表示装置における表示例を示す図である。
【図4】本発明の実施例2に係る目標表示装置の構成を示すブロック図である。
【図5】本発明の実施例2に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図6】本発明の実施例2に係る目標表示装置における表示例を示す図である。
【図7】本発明の実施例3に係る目標表示装置における表示例を示す図である。
【図8】本発明の実施例3に係る目標表示装置で実行される目標表示処理を示すフローチャートである。
【図9】本発明の実施例3に係る目標表示装置における表示例を示す図である。
【図10】本発明の実施例3に係る目標表示装置の他の表示例を示す図である。
【図11】従来の目標表示装置の構成を示すブロック図である。
【図12】従来の目標表示装置で実行される目標表示処理を示すフローチャートである。
【図13】従来の目標表示装置で表示部への表示方法としてPPI表示が指定された場合の表示例を示す図である。
【図14】従来の目標表示装置における表示例(誤差範囲境界線あり、通常表示)を示す図である。
【図15】従来の目標表示装置における表示例(誤差範囲境界線あり、ズーム表示)を示す図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。なお、以下においては、背景技術の欄で説明した構成部分に相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0024】
図1は、本発明の実施例1に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1a、制御部2aおよび表示部3を備えている。操作部1aは、背景技術の欄で説明した従来の目標表示装置の操作部1に、倍率設定部11が付加されて構成されている。倍率設定部11は、誤差範囲境界線の倍率を設定する。倍率設定部11で設定された倍率は、制御部2aに送られる。
【0025】
制御部2aは、背景技術の欄で説明した従来の目標表示装置の制御部2に、誤差範囲境界線演算部21が付加されて構成されている。誤差範囲境界線演算部21は、操作部1aの倍率設定部11で設定された倍率kにしたがって、誤差範囲境界線をk倍する演算を実行する。制御部2aは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1aから送られてくる制御信号に基づいて処理し、表示信号として表示部3に送る。
【0026】
次に、上記のように構成された実施例1に係る目標表示装置の動作を説明する。図2は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST101)。すなわち、制御部2aは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0027】
次いで、画面の表示方法が入力される(ステップST102)。すなわち、操作員の操作に応じて、操作部1aから画面の表示方法に関する情報が入力される。操作部1aから入力された画面の表示方法に関する情報は、制御部2aに送られる。次いで、誤差範囲境界線倍率等が入力される(ステップST103)。すなわち、操作員の操作に応じて、操作部1aの倍率設定部11から誤差範囲境界線の倍率が入力されるとともに、操作部1aから誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2aに送られる。
【0028】
次いで、境界線表示が「入」であるかどうかが調べられる(ステップST104)。すなわち、制御部2aは、ステップST103で入力された誤差範囲境界線の表示入/切に関する情報が、「入」を示しているかどうかを調べる。ステップST104において、「入」でないことが判断されると、シーケンスはステップST106に進む。
【0029】
一方、ステップST104において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST105)。すなわち、制御部2aの誤差範囲境界線演算部21は、ステップST103において入力された倍率と、ステップST101において入力された目標の推定値および誤差共分散行列とに基づいて、誤差範囲境界線の表示データを演算により求める。
【0030】
ここで、目標の2次元直交座標の推定値ベクトルXを[px,py,vx,vy]T、誤差共分散行列PをE[(X−E[X])(X−E[X])T]とする。px,py,vx,vyは、それぞれ、x軸の位置、y軸の位置、x軸の速度、y軸の速度であり、ATは、ベクトルAまたは行列Aの転置、E[・]は、期待値を示す。また、以下に示すP(1,1)、P(2,2)、P(1,2)は、それぞれ、x軸の位置誤差の分散、y軸の位置誤差の分散、x軸とy軸の位置誤差の分散に対応する。
【0031】
2次元直交座標の推定値ベクトルXおよび誤差共分散行列Pに対する誤差範囲境界線データは、推定値ベクトルXの位置成分px、pyを中心とする楕円として計算され、操作部1aで設定された誤差範囲境界線の倍率をkとすると、以下の(1)〜(5)式で表される。
【0032】
ここで、thは、誤差範囲境界線の閾値であり、制御部2aに予め設定された値を用いるほか、外部または操作部1aから入力するように構成することができる。また、操作部1aから閾値パラメータとして、観測値がゲート内に入る確率(下側確率)plまたは観測値がゲート内に入らない確率(上側確率)puを入力し、制御部2aで、カイ二乗分布の逆関数から閾値th(=f−1(閾値パラメータ,自由度)=f−1(下側確率plまたは上側確率pu,2))を算出するように構成することができる。上述した演算が終了すると、シーケンスはステップST106に進む。
【0033】
ステップST106においては、表示ビデオ信号への変換が行われる。すなわち、制御部2aは、目標の推定位置データやステップST105で得られた誤差範囲境界線の表示データ[ex(i),ey(i)]を、ステップST102で入力された画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0034】
次いで、画面表示が行われる(ステップST107)。すなわち、制御部2aは、ステップST106で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の画面に表示が行われる。次いで、終了であるかどうかが調べられる(ステップST108)。ステップST108において、終了でないことが判断されると、ステップST101に戻り上述した処理が繰り返される。一方、ステップST108において、終了であることが判断されると、目標表示処理は終了する。
【0035】
なお、上述した例では、誤差範囲境界線の表示データを点データとして与える場合について説明したが、線分データ[ex(i),ey(i),ex(i+1),ey(i+1)]として、与えるように構成することもできる。
【0036】
図3は、画面の表示方法としてPPI表示が指定された場合の目標表示装置における表示例を示す図である。ここで、○印は、各目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、各目標の平滑誤差範囲境界線を示す。
【0037】
以上説明したように、本発明の実施例1に係る目標表示装置によれば、図13に示した従来の目標表示装置においては、各目標の誤差範囲を視認可能に示すことができなかったが、図3に示すように、これを改善することができ、操作員は、目標の位置精度に関する詳細な情報を得ることができる。
【0038】
なお、制御部2aは、操作部1aの倍率設定部11で設定された倍率に応じて、誤差範囲境界線の線種または色の少なくとも1つを変化させるように構成できる。また、制御部2aは、操作部1aの倍率設定部11で設定された倍率を表示部3の画面上に表示させるように構成することもできる。さらに、これらの構成のうちの1つのみ、または、両方を備えるように構成することもできる。
【実施例2】
【0039】
図4は、本発明の実施例2に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1b、制御部2bおよび表示部3を備えている。操作部1bは、背景技術の欄で説明した従来の目標表示装置の操作部1に、副画面設定部12が付加されて構成されている。副画面設定部12は、副画面(の中心)に表示する主画面上の位置または目標を設定する。副画面設定部12で設定された内容は、制御部2bに送られる。
【0040】
制御部2bは、背景技術の欄で説明した従来の目標表示装置の制御部2に、副画面誤差範囲境界線演算部22が付加されて構成されている。副画面誤差範囲境界線演算部22は、操作部1bの副画面設定部12で設定された位置または目標に基づいて、誤差範囲境界線を演算により求め、また、主画面および副画面を同一画面に表示するための処理を実行する。制御部2bは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1bから入力される制御信号に基づいて処理し、表示信号として表示部3に送る。
【0041】
次に、上記のように構成された実施例2に係る目標表示装置の動作を説明する。図5は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST201)。すなわち、制御部2bは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0042】
次いで、主/副画面の表示方法が入力される(ステップST202)。すなわち、操作員の操作に応じて、操作部1bから主画面および副画面の表示方法に関する情報が入力される。操作部1bから入力された主画面および副画面の表示方法に関する情報は、制御部2bに送られる。
【0043】
次いで、副画面表示位置/目標の選択が行われる(ステップST203)。すなわち、操作員の操作に応じて、操作部1bの副画面設定部12から副画面(の中心)に表示する主画面上の位置または目標に関する情報が入力される。操作部1bの副画面設定部12から入力された位置または目標に関する情報は、制御部2bに送られる。
【0044】
次いで、誤差範囲境界線倍率等が入力される(ステップST204)。すなわち、操作員の操作に応じて、操作部1bから誤差範囲境界線の倍率が入力されるとともに、誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2bに送られる。
【0045】
次いで、副画面表示が「入」であるかどうかが調べられる(ステップST205)。すなわち、制御部2bは、ステップST203で入力された誤差範囲境界線の表示入/切に関する情報が、副画面表示の「入」を示しているかどうかを調べる。ステップST205において、「入」でないことが判断されると、シーケンスはステップST207に進む。
【0046】
一方、ステップST205において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST206)。すなわち、制御部2bの副画面誤差範囲境界線演算部22は、ステップST204において入力された誤差範囲境界線の倍率、ステップST203において操作部1bの副画面設定部12から入力された位置または目標に関する情報、ならびに、ステップST201において入力された目標の推定値および誤差共分散行列に基づいて、誤差範囲境界線の表示データを演算により求める。この演算は、上述した実施例1に係る目標表示装置で行われる演算と同様である。その後、シーケンスはステップST207に進む。
【0047】
ステップST207においては、表示ビデオ信号への変換が行われる。すなわち、制御部2bは、目標の推定位置データやステップST206で演算により得られた誤差範囲境界線の表示データ[ex(i),ey(i)]を、ステップST202で入力された主画面および副画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0048】
次いで、主・副画面表示が行われる(ステップST208)。すなわち、制御部2bは、ステップST207で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3の主画面および副画面に画像が表示される。次いで、終了であるかどうかが調べられる(ステップST209)。ステップST209において、終了でないことが判断されると、ステップST201に戻り上述した処理が繰り返される。一方、ステップST209において、終了であることが判断されると、目標表示処理は終了する。
【0049】
図6(a)は、画面の表示方法としてPPI表示が指定された場合の目標表示装置における表示例を示す図である。ここで、主画面および副画面に表示された○印は、各目標の平滑位置を示し、副画面に表示された○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。
【0050】
なお、副画面(の中心)に表示する位置または目標が2以上設定された場合、図6(b)に示すように、副画面エリアの画面の分割数を自動的に増やして、分割された画面の各々に、設定された2以上の位置または目標をそれぞれ表示するように構成できる。この構成によれば、複数目標の位置精度に関する詳細な情報を得ることができる。
【0051】
以上説明したように、実施例2に係る目標表示装置によれば、操作員は、レーダ装置の捜索範囲の全体状況を主画面で確認しながら、従来のズーム表示と同様に、副画面を見ることにより、自ら設定した主画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。
【0052】
なお、上述した実施例2に係る目標表示装置では、操作部1bから副画面に表示する対象として目標が設定された場合、目標の位置を略中心に、副画面に表示を行うように構成することができる。これにより、目標が移動しても、煩雑な操作を行なうことなく、設定した目標の位置精度および目標近傍の状況を継続的に表示することができる。
【0053】
また、実施例2に係る目標表示装置では、副画面にのみ、誤差範囲境界線を表示するように構成したが、誤差範囲境界線は、実施例1と同様に、主画面にも表示するように構成し、副画面とは独立に、誤差範囲境界線の倍率を変化させるように構成することができる。
【実施例3】
【0054】
図7は、本発明の実施例3に係る目標表示装置の構成を示すブロック図である。この目標表示装置は、操作部1c、制御部2cおよび表示部3aを備えており、表示部3aは、第1画面を表示する第1画面表示部31と第2画面を表示する第2画面表示部32とから構成されている。第1画面は本発明の他の画面に対応し、第2画面は本発明の特定画面に対応する。
【0055】
操作部1bは、背景技術の欄で説明した従来の目標表示装置の操作部1に、第2画面設定部13が付加されて構成されている。第2画面設定部13は、第2画面表示部32(の中心)に表示する第1画面上の位置または目標を設定する。第2画面設定部13で設定された位置または目標は、制御部2cに送られる。
【0056】
制御部2cは、背景技術の欄で説明した従来の目標表示装置の制御部2に、第2画面誤差範囲境界線演算部23が付加されて構成されている。第2画面誤差範囲境界線演算部23は、操作部1cの第2画面設定部13で設定された位置または目標に基づいて、誤差範囲境界線を演算により求め、また、第2画面表示部32に表示する第2画面を生成する処理を実行する。制御部2cは、外部から入力されたレーダビデオ信号や航跡処理装置等によりデータ処理された航跡データを、操作部1cから入力される制御信号に基づいて処理し、表示信号として表示部3aに送る。
【0057】
次に、上記のように構成された実施例3に係る目標表示装置の動作を説明する。図8は、目標表示装置で実行される目標表示処理を示すフローチャートである。目標表示処理が開始されると、まず、推定値および誤差共分散行列が入力される(ステップST301)。すなわち、制御部2cは、航跡処理装置等から目標の推定値と誤差共分散行列を入力する。
【0058】
次いで、第1画面/第2画面の表示方法が入力される(ステップST302)。すなわち、操作員の操作に応じて、操作部1cから第1画面表示部31および第2画面表示部32の画面の表示方法に関する情報が入力される。操作部1cから入力された画面の表示方法に関する情報は、制御部2cに送られる。
【0059】
次いで、第2画面表示位置/目標の選択が行われる(ステップST303)。すなわち、操作員の操作に応じて、操作部1cの第2画面設定部13から、第2画面表示部32(の中心)に表示する第1画面表示部31上の位置または目標に関する情報が入力される。操作部1cから入力された位置または目標に関する情報は、制御部2cに送られる。
【0060】
次いで、誤差範囲境界線倍率等が入力される(ステップST304)。すなわち、操作員の操作に応じて、操作部1cから誤差範囲境界線の倍率に関する情報が入力されるとともに、誤差範囲境界線の表示入/切に関する情報が入力される。これらの情報は、制御部2cに送られる。
【0061】
次いで、第2画面表示が「入」であるかどうかが調べられる(ステップST305)。すなわち、制御部2cは、ステップST303で入力された誤差範囲境界線の表示入/切に関する情報が、第2画面表示の「入」を示しているかどうかを調べる。ステップST305において、「入」でないことが判断されると、シーケンスはステップST307に進む。
【0062】
一方、ステップST305において、「入」であることが判断されると、次いで、誤差範囲境界線データの演算が行われる(ステップST306)。すなわち、制御部2cの第2画面誤差範囲境界線演算部23は、ステップST304において入力された誤差範囲境界線の倍率、ステップST303において第2画面設定部13から入力された位置または目標に関する情報、ならびに、ステップST301において入力された目標の推定値および誤差共分散行列に基づいて、誤差範囲境界線データを演算により算出する。この演算は、上述した実施例1に係る目標表示装置で行われる演算と同様である。その後、シーケンスはステップST307に進む。
【0063】
ステップST307においては、表示ビデオ信号への変換が行われる。すなわち、制御部2cは、目標の推定位置データやステップST306における演算により得られた誤差範囲境界線データ[ex(i),ey(i)]を、ステップST302で入力された第1画面/第2画面の表示方法にしたがって、表示ビデオ信号へ変換する。
【0064】
次いで、第1画面/第2画面表示が行われる(ステップST308)。すなわち、制御部2cは、ステップST307で得られた表示ビデオ信号を表示部3に送る。これにより、表示部3aの第1画面表示部31および第2画面表示部32に画像が表示される。次いで、終了であるかどうかが調べられる(ステップST309)。ステップST309において、終了でないことが判断されると、ステップST301に戻り上述した処理が繰り返される。一方、ステップST309において、終了であることが判断されると、目標表示処理は終了する。
【0065】
図9は、画面の表示方法としてPPI表示が指定された場合の目標表示装置の第2表示画面部32における表示例を示す図である。ここで、○印は、目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。また、○印から伸びる実線で描かれた直線は、現在の平滑位置と次回観測時の予測位置を結んでおり、次回観測時の予測位置を中心に点線で描かれた楕円は、次回の観測時に相関が取れる範囲を表す残差誤差範囲境界線(特許文献1に示された目標予測存在範囲境界線に対応)を示している。
【0066】
以上説明したように、実施例2に係る目標表示装置によれば、操作員は、第1画面表示部31でレーダ装置の捜索範囲の全体状況を確認しながら、従来のズーム表示と同様に、第2画面表示部32を見ることにより、自ら設定した第1画面表示部31の画面上の位置または目標の位置精度に関する詳細な情報を得ることができる。
【0067】
なお、第2画面表示部32(の中心)に表示する位置または目標が2以上設定された場合、図10に示すように、第2画面表示部32の画面の分割数を自動的に増やして、分割された画面の各々に、設定された2以上の位置または目標をそれぞれ表示するように構成できる。図10に示す各画面の○印は、目標の平滑位置を示し、○印の周囲の実線で描かれた楕円は、目標の平滑誤差範囲境界線を示す。この構成によれば、複数目標の位置精度に関する詳細な情報を得ることができる。
【0068】
また、実施例3に係る目標表示装置では、表示部3aを2つの画面表示部で構成した例を示したが、表示部3aとしては、2つ以上の画面表示部で構成することもできる。
【0069】
また、上述した実施例1〜実施例3に係る目標表示装置においては、制御部は、誤差範囲境界線として、平滑値または予測値と観測誤差共分散行列から算出される観測誤差範囲境界線、平滑値と平滑誤差共分散行列から算出される平滑誤差範囲境界線、予測値と予測誤差共分散行列から算出される予測誤差範囲境界線、予測値と残差共分散行列から算出される残差誤差範囲境界線の少なくとも1つを選択して表示させるように構成できる。この場合、誤差範囲境界線毎に線種および色の少なくとも1つを変化させるように構成できる。
【産業上の利用可能性】
【0070】
本発明は、レーダ装置やソナー装置などの目標表示装置として利用可能である。
【符号の説明】
【0071】
1、1a、1b、1c 操作部
2、2a、2b、2c 制御部
3、3a 表示部
31 第1画面表示部
32 第2画面表示部
11 倍率設定部
12 副画面設定部
13 第2画面設定部
21 誤差範囲境界線演算部
22 副画面誤差範囲境界線演算部
23 第2画面誤差範囲境界線演算部
【特許請求の範囲】
【請求項1】
目標の誤差範囲境界線の倍率を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項2】
主画面と副画面とを同一画面上に表示する目標表示装置であって、
前記副画面に表示する前記主画面上の位置または目標を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を前記副画面に表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項3】
複数の画面を有する目標表示装置であって、
前記複数の画面の中の特定画面に表示させる他の画面上の位置または目標を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を前記特定画面に表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項4】
前記制御部は、前記操作部によって前記副画面または前記特定画面に表示させる目標の誤差範囲境界線の倍率が設定された場合、外部から入力される目標の推定値及び該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標、並びに倍率とに基づき、目標の誤差範囲境界線を算出し、
前記表示部は、前記制御部で算出された目標の誤差範囲境界線を、前記副画面または前記特定画面に表示することを特徴とする請求項2または請求項3記載の目標表示装置。
【請求項5】
前記制御部は、前記操作部によって位置または目標が複数設定された場合、表示先となる前記副画面または前記特定画面を複数に分割し、分割した画面の各々に表示させる複数の目標の誤差範囲境界線を算出し、
前記表示部は、前記制御部で算出された複数の目標の誤差範囲境界線を、分割された複数の画面にそれぞれ表示することを特徴とする請求項2乃至請求項4のいずれか1項記載の目標表示装置。
【請求項6】
前記表示部は、前記操作部で目標が設定された場合、該目標をその表示先となる前記副画面または前記特定画面の略中心に表示することを特徴とする請求項2乃至請求項5のいずれか1項記載の目標表示装置。
【請求項7】
前記制御部は、誤差範囲境界線として、平滑値または予測値と観測誤差共分散行列から算出される観測誤差範囲境界線、平滑値と平滑誤差共分散行列から算出される平滑誤差範囲境界線、予測値と予測誤差共分散行列から算出される予測誤差範囲境界線、予測値と残差共分散行列から算出される残差誤差範囲境界線の少なくとも1つを選択して表示させることを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【請求項8】
前記制御部は、誤差範囲境界線毎に線種および色の少なくとも1つを変化させて表示させることを特徴とする請求項7記載の目標表示装置。
【請求項9】
前記制御部は、外部または前記操作部から入力された目標の誤差範囲境界線の閾値、あるいは、前記操作部で設定された閾値パラメータから算出された目標の誤差範囲境界線の閾値に基づいて、目標の誤差範囲境界線の倍率を調整することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【請求項10】
前記制御部は、目標の誤差範囲境界線の算出に用いた倍率に応じて誤差範囲境界線の線種または色の少なくとも1つを変化させる処理または目標の誤差範囲境界線の算出に用いた倍率を前記表示部の画面上に表示させる処理の少なくとも1つを実行することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【請求項1】
目標の誤差範囲境界線の倍率を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項2】
主画面と副画面とを同一画面上に表示する目標表示装置であって、
前記副画面に表示する前記主画面上の位置または目標を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を前記副画面に表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項3】
複数の画面を有する目標表示装置であって、
前記複数の画面の中の特定画面に表示させる他の画面上の位置または目標を設定する操作部と、
外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標とに基づき、目標の誤差範囲境界線を算出する制御部と、
前記制御部で算出された目標の誤差範囲境界線を前記特定画面に表示する表示部と、
を備えることを特徴とする目標表示装置。
【請求項4】
前記制御部は、前記操作部によって前記副画面または前記特定画面に表示させる目標の誤差範囲境界線の倍率が設定された場合、外部から入力される目標の推定値及び該推定値の誤差を示す誤差共分散行列と、前記操作部で設定された位置または目標、並びに倍率とに基づき、目標の誤差範囲境界線を算出し、
前記表示部は、前記制御部で算出された目標の誤差範囲境界線を、前記副画面または前記特定画面に表示することを特徴とする請求項2または請求項3記載の目標表示装置。
【請求項5】
前記制御部は、前記操作部によって位置または目標が複数設定された場合、表示先となる前記副画面または前記特定画面を複数に分割し、分割した画面の各々に表示させる複数の目標の誤差範囲境界線を算出し、
前記表示部は、前記制御部で算出された複数の目標の誤差範囲境界線を、分割された複数の画面にそれぞれ表示することを特徴とする請求項2乃至請求項4のいずれか1項記載の目標表示装置。
【請求項6】
前記表示部は、前記操作部で目標が設定された場合、該目標をその表示先となる前記副画面または前記特定画面の略中心に表示することを特徴とする請求項2乃至請求項5のいずれか1項記載の目標表示装置。
【請求項7】
前記制御部は、誤差範囲境界線として、平滑値または予測値と観測誤差共分散行列から算出される観測誤差範囲境界線、平滑値と平滑誤差共分散行列から算出される平滑誤差範囲境界線、予測値と予測誤差共分散行列から算出される予測誤差範囲境界線、予測値と残差共分散行列から算出される残差誤差範囲境界線の少なくとも1つを選択して表示させることを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【請求項8】
前記制御部は、誤差範囲境界線毎に線種および色の少なくとも1つを変化させて表示させることを特徴とする請求項7記載の目標表示装置。
【請求項9】
前記制御部は、外部または前記操作部から入力された目標の誤差範囲境界線の閾値、あるいは、前記操作部で設定された閾値パラメータから算出された目標の誤差範囲境界線の閾値に基づいて、目標の誤差範囲境界線の倍率を調整することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【請求項10】
前記制御部は、目標の誤差範囲境界線の算出に用いた倍率に応じて誤差範囲境界線の線種または色の少なくとも1つを変化させる処理または目標の誤差範囲境界線の算出に用いた倍率を前記表示部の画面上に表示させる処理の少なくとも1つを実行することを特徴とする請求項1乃至請求項6のいずれか1項記載の目標表示装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−204045(P2010−204045A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−52534(P2009−52534)
【出願日】平成21年3月5日(2009.3.5)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年3月5日(2009.3.5)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]