
目標識別用レーダ装置
【課題】 観測された目標の識別を行う目標識別用レーダ装置において、クラッタ及び人工物の偏波特性を利用して、目標識別性能を向上する。
【解決手段】 広帯域パルスを発生して送信する送信機と、相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、上記特徴量を用いて目標の識別を行う目標識別部とを備える。
【解決手段】 広帯域パルスを発生して送信する送信機と、相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、上記特徴量を用いて目標の識別を行う目標識別部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーダの分野における目標のレンジプロフィールと偏波の情報を用いて目標を識別するレーダ装置に関するものである。
【背景技術】
【0002】
目標識別を行うレーダ装置に関する従来の技術として、高い距離分解能をもつレーダ装置において観測される目標のレンジプロフィールを利用して目標を識別するものがあり、識別の対象とする候補目標のレンジプロフィールを参照用レンジプロフィールとして予め蓄積しておくライブラリと、観測された目標レンジプロフィールとライブラリに蓄積された参照用レンジプロフィールの相関を計算する手段とを備え、観測された目標レンジプロフィールと相関の高い参照用レンジプロフィールがある場合、観測された目標はその参照用レンジプロフィールに対応する目標であると識別することが開示されている(例えば、非特許文献1参照。)。
【0003】
【非特許文献1】“Correlation Filters for Aircraft Identification From Radar Range Profiles”,IEEE Transactions on Aerospace and Electronic Systems,vol.29,no.3,pp.741-748,July 1993
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の目標識別用レーダ装置は以上のように構成されているが、目標の近隣に建造物がある場合や、目標周辺のクラッタが複雑形状である場合や、目標周辺のクラッタ状態(風による草原の揺らぎ)が変化しやすい状態の場合、ミリ波帯など波長の短い周波数帯を用いた場合、目標を誤識別するという問題が発生する。
【0005】
この発明は、上記のような課題を解決するためになされたもので、目標の近隣に建造物がある場合や、目標周辺のクラッタが複雑形状である場合や、目標周辺のクラッタ状態(風による草原の揺らぎ)が変化しやすい状態の場合、ミリ波帯などの目標の大きさに対して波長の短い周波数帯を用いた場合にも目標識別性能を向上することができる目標識別用レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る目標識別用レーダ装置は、広帯域パルスを発生して送信する送信機と、相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、上記特徴量を用いて目標の識別を行う目標識別部とを備えたものである。
【発明の効果】
【0007】
この発明によれば、偏波信号を元に生成したクラッタ及び人工物の偏波特性に合せてクラッタ主成分を抑圧するフィルタを構築し、取り扱う信号を選択すると共に、各偏波チャネルのレンジプロフィールの大まかな形状を示す複数種類の指標と、複数偏波チャネルのレンジプロフィール間の関係を示す複数種類の指標を算出し、特徴量を組み合わせて目標及び人工物を識別を行うことにより、目標を正しく検出、識別する確率を向上できるという効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1はこの発明の実施の形態1による目標識別用レーダ装置の構成を示すブロック図である。クラッタの偏波特性は、クラッタ形状や時間的に変換する状態によって大きく異なるため、想定されるあらゆるクラッタ環境に関して、あらゆるアスペクト角度及びあらゆるエレベーション角(電波の入射角)で観測した偏波特性を参照データとして用意し、これらを全て候補目標の偏波特性ライブラリに蓄積しておく必要がある。
一方、目標のレンジプロファイルは、目標のアスペクト角(目標の中心線とレーダの視線方向のなす角)に大きく依存するため、各候補目標に関して、あらゆるアスペクト角で観測したレンジプロフィールを参照データとして用意し、これらを全て候補目標レンジプロフィールのライブラリに蓄積しておく必要がある。
【0009】
しかしながら、この方法では、各候補となるクラッタ、人工物及び目標に関して、エレベーション角及びアスペクト角を非常に細かい刻みで変化させて参照データを作成して蓄積することが要求されるため、候補となるクラッタ、人工物及び目標の偏波特性のライブラリが膨大なものとなってしまう問題が発生する。候補となるクラッタ、人工物及び目標の偏波特性のライブラリを可能な限り小さくするためには、参照データとして蓄積しておくエレベーション角及びアスペクト角の刻みを大きくすることが望ましいが、今度は、候補となるクラッタ、人工物及び目標の偏波特性が、観測時のエレベーション角及びアスペクト角と完全に一致したデータを含まない場合に、人工物及び目標の識別性能が劣化する問題が発生する。そこでこの実施の形態では、特徴量を組み合わせて目標識別を行うことによって問題を解決する。
【0010】
そこで、目標及びクラッタ等に対するエレベーション角による偏波特性に着目して、3成分分解法に加えて、3成分散乱モデル分解法を用いて、クラッタ、人工物、目標の類別能力を高める。
【0011】
例えば、市街地におけるクラッタ及び人工物の偏波特性を把握でき、クラッタ主成分を抑圧するフィルタを構築できると共に、目標と人工物の類別フィルタを構築できる。市街地用フィルタ、草原用フィルタ、砂漠用フィルタ、アスファルト用フィルタ等、フィルタ選択が適切になり、目標検出確率が向上する。
市街地の偏波特性は、3成分分解法による評価では、エレベーション角によらず、奇数回反射成分及び偶数回反射成分の寄与率が50%でほぼ一定である。しかし、3成分散乱モデル分解法を用いた場合、エレベーション角が大きくなると(目標に近づく)2回反射成分が大きくなる傾向にある。これらを利用し、各種クラッタの中でビル群を類別し、また、目標とビル群を類別し、市街地クラッタ減算に適したフィルタを構築し、目標抽出類別能力を向上する。
また、3成分分解法による目標類別には、アスペクト角度感度の低い特徴量を抽出することが望ましい。従って、目標とビル群とを類別する場合、目標類別に有効と考えている奇数回反射成分と偶数回反射成分寄与率の重心周りのモーメント、多重反射成分寄与率の標準偏差以外の特徴量にて比較することが有効と考える。
【0012】
以下図1について説明する。
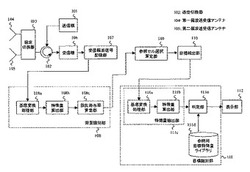
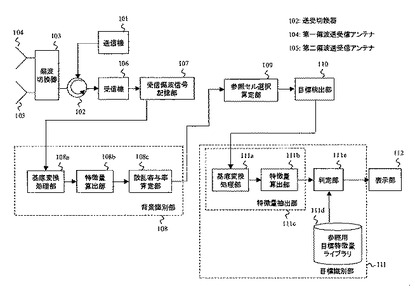
101はパルス信号を送信する送信機、102は送受信を切り換える送受切換器、103は偏波切換器、104は第2偏波送受信アンテナ105の偏波特性と直交する偏波特性を有する第1偏波送受信アンテナ、105は第1偏波送受信アンテナ104の偏波特性と直交する偏波特性を有する第2偏波送受信アンテナである。
【0013】
なお、第1偏波送受信アンテナ104及び第2偏波送受信アンテナ105における偏波特性が直交する組み合わせとして、例えば、垂直偏波と水平偏波の組み合わせや、右旋円偏波と左旋円偏波の組み合わせなどが考えられる。
【0014】
106は第1偏波送受信アンテナ104及び第2偏波送受信アンテナ105により受信された受信信号に対する位相検波とA/D変換処理を実施して、その偏波信号の振幅と位相を示すディジタルの受信偏波信号(以下、散乱行列レンジプロフィールという。散乱行列レンジプロフィールについては後述する)を出力する受信機である。
【0015】
107は受信機106から出力された散乱行列レンジプロフィールを蓄積する受信偏波信号記憶部、108は受信偏波信号記憶部より送られた散乱行列レンジプロフィールよりクラッタ及び人工物を識別する背景識別部、109はクラッタ及び人工物識別部から送られたレンジセル毎の散乱行列レンジプロフィールを元に、クラッタ主成分を抑圧するためのフィルタ係数を算出するための参照セルと注目セルを選択する参照セル選択算定部、110は参照セル選択算定部から送られた注目セル(目標)にフィルタを適用し、クラッタを抑圧して目標を検出し、検出された目標位置近傍の散乱行列レンジプロフィールの切り出しを行う目標検出部、111は目標検出部110によって切り出された散乱行列レンジプロフィールから複数の特徴量を算出し、ここで得られた特徴量を、事前に蓄積された既知の目標に関する特徴量のライブラリと比較することで目標を識別する目標識別部、112は目標の検出結果と識別結果を表示する表示部である。
【0016】
なお、108aは受信偏波信号記憶部107より送られた散乱行列レンジプロフィールに対して偏波基底変換処理を行い、複数偏波チャネルのレンジプロフィールを生成する偏波基底変換処理部、108bは108aによって得られた複数偏波チャネルレンジプロフィールより、クラッタ及び人工物の識別に利用する複数の特徴量を算出する特徴量算出部、108cは108bによって得られた3成分分解法及び3成分散乱モデル分解法による特徴量をもとに、奇数回反射成分及び偶数回反射成分の寄与率を算出する散乱寄与率算定部である。
【0017】
なお、111aは目標検出部110より送られた散乱行列レンジプロフィールに対して偏波基底変換処理を行い、複数偏波チャネルのレンジプロフィールを生成する偏波基底変換処理部、111bは111aによって得られた複数偏波チャネルレンジプロフィールより、識別に利用する複数の特徴量を算出する特徴量算出部、111cは偏波基底変換処理部111aと特徴量算出部111bを備える特徴量抽出部、111dは既知の目標に関する特徴量を蓄積している参照用目標特徴量ライブラリ、111eは特徴量抽出部111cで抽出された特徴量と参照用目標特徴量ライブラリ111dに蓄積された特徴量とから、事前に定められた規則に従って目標識別をおこなう判定部である
【0018】
次に、動作について説明する。
送信機101が広帯域パルスとしてパルス信号を生成すると、送受切換器102が当該パルス信号を偏波切換器103に送り、偏波切換器103が、第1偏波送受信アンテナ104を駆動することにより、そのパルス信号を第1偏波送受信アンテナ104から空間に放射させる。なお、以下では第1偏波送受信アンテナ104と第2偏波送受信アンテナ105の偏波特性が、それぞれ水平偏波と垂直偏波である場合について述べる。
【0019】
第1偏波送受信アンテナ104から空間に放射されたパルス信号は観測対象によって散乱される。
偏波切換器103は、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105の双方を駆動することにより、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105が観測対象によって散乱された散乱波をそれぞれ受信すると、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105が受信信号を受信機106に送り、受信機106が第1偏波送受信アンテナ104と第2偏波送受信アンテナ105において受信された受信信号のそれぞれに対する位相検波処理とA/D変換処理を実施して、それぞれの受信信号の振幅と位相を示すディジタル受信信号S11(m),S21(m)を出力する。
【0020】
なお、Sij(m)は、第j偏波送受信アンテナで送信して第i偏波送受信アンテナで受信された受信信号のm番目(m=1,2,・・・,M)のサンプル値である。ここで、Mはサンプル数である。同様に、送信機101で生成した広帯域パルスを、送受切換器102を介して偏波切換器103に送り、これを第2偏波送受信アンテナ105から目標に照射して第1偏波送受信アンテナ105と第2偏波送受信アンテナ106において受信された受信信号同様の処理を繰り返すことにより、受信信号S12(m),S22(m)を得る。
【0021】
受信偏波信号記憶部107は、得られた受信信号S11(m),S21(m),S12(m),S22(m)を一時蓄積し、蓄積された信号は、観測対象に関する各分解能セルに散乱行列Sm(m=1,2,・・・,M)の値をもつ散乱行列レンジプロフィールであり、式(1)のように表される。
なお、以下では、送信アンテナと受信アンテナの偏波状態の組み合わせのことを偏波チャネルと呼ぶことがある。
【0022】
【数1】

【0023】
基底変換処理部108aは、受信偏波信号記憶部107に蓄積された散乱行列レンジプロフィールSm(m=M0,M0+1,・・・,M0+MT-1)に対し、式(2)に例示する3成分分解法及び静止分散乱モデル分解法を用いて偏波成分分解を行う。
【0024】
例えば式(2)で示す偏波成分分解を用いて、受信波のうち、目標物において奇数回反射された後に送受信アンテナに到達した奇数回反射成分Ko(m)、目標物において偶数回反射された後に送受信アンテナに到達した偶数回反射成分Ke(m)、目標で反射される際に生じた、入射波と直交する偏波成分(交差成分)Kc(m)を求める。
【0025】
【数2】
【0026】
以上のように、種々の偏波基底変換や偏波成分分解を行うことにより、任意の種類の偏波チャネルについてレンジプロフィールを得ることが可能である。
ここで得られたレンジプロフィールの組を、以下ではクラッタ及び人工物の複数偏波チャネルレンジプロフィールと呼ぶ。なお、ここでは、「偏波チャネル」は送信偏波と受信偏波の組み合わせだけでなく、Ko,Ke,Kcなどの偏波成分のことも含むこととする(以下同様)。
次に、特徴量算出部108bは、上記の基底変換処理によって得られた複数偏波チャネルレンジプロフィールから、以下に定義する特徴量を算出する。
【0027】
次に、散乱寄与率算定部108cは、3成分分解法及び3成分散乱モデル分解能法により算出された特徴量を元に、奇数回反射成分、偶数回反射成分、多重反射成分等の構成比を解析し、クラッタ並びに人工物と目標とを類別する。
【0028】
次に、参照セル選択算定部109は、散乱寄与率算定部から人工物と目標とを類別した結果に基づく注目セルと、クラッタ係数を算出、決定し、クラッタを抑圧するためのフィルタ構築に使用する参照セルとを選択、決定する。
【0029】
次に、目標検出部110は参照セル選択算定部から出力された散乱行列レンジプロフィールから、目標を検出する。目標検出部110は検出された目標位置近傍のサンプルSm(m=M0,M0+1,・・・,M0+MT-1)を切り出す。
【0030】
基底変換処理部111aは、目標検出部110において切り出された目標の散乱行列レンジプロフィールSm(m=M0,M0+1,・・・,M0+MT-1)に対し、式(2)に例示する偏波成分分解を行う。
【0031】
次に、特徴量算出部111bは、上記の基底変換処理によって得られた複数偏波チャネルレンジプロフィールから、以下に定義する特徴量を算出する。
【0032】
【数3】
【0033】
式(3)において、P(m)はある偏波チャネルの信号の電力値を表しており、例えば、水平偏波送信水平偏波受信の偏波チャネルについては、式(4)のように定義される。rgは重心であり、式(5)のように定義される。Xpは偏波チャネルpのレンジプロフィールのフーリエスペクトルを表す。
【0034】
式(3)において、2次と3次のクロスモーメントスペクトルは、それぞれ偏波チャネル1と2と偏波チャネル1と2と3とで例示してあるが、基底変換処理部109aで得られた全ての偏波チャネルの組み合わせについて計算することが可能である。
【0035】
【数4】
【0036】
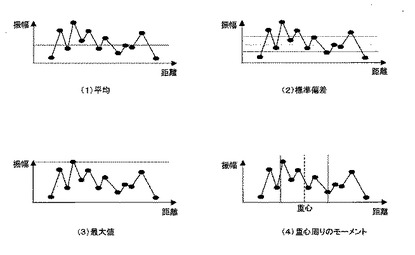
図2は特徴量算出部で算出される特徴量のうち、平均、標準偏差、最大値および重心周りのモーメントの定義を示す説明図である。
特徴量は特徴量算出部111bで算出され、平均値は各偏波チャネルの平均的な反射強度、最大値は最大の反射強度、標準偏差は各偏波チャネルのレンジプロフィール形状の複雑さ、重心周りのモーメントは主にレンジプロフィールの長さを表す指標となっていることがわかる。
【0037】
さらに、式(3)より、正規化された重心周りのモーメントとバイスペクトルはレンジプロフィール上での散乱強度の強い点の分布の様子、クロスモーメントスペクトルは複数偏波チャネルのレンジプロフィール間の関係をそれぞれ示す指標となっていると言える。以上をまとめると、式(3)に示した特徴量は、各偏波チャネルのレンジプロフィールの大まかな形状を示す指標と、複数偏波チャネルのレンジプロフィール間の関係を示す指標に大別できる。
【0038】
参照用目標特徴量ライブラリ111dには、同様にして事前に観測したN種類の目標の散乱行列レンジプロフィールより抽出された特徴量が格納されている。Smnは事前の観測の他に、理論計算(例えば、GTD:Geometrical Theory of Diffraction)などから得ることも可能である。
【0039】
判定部111eは、参照用目標特徴量ライブラリ111dに蓄積されたN種類の目標に関する特徴量と比較を行い、あらかじめ定められた規則に従って目標の識別を行う。
【0040】
例えば、識別に利用する特徴量の数がLの場合、各目標に関するL個の特徴量をL次元の特徴量ベクトルの形で参照用目標特徴量ライブラリ111dに蓄積しておき、受信信号から抽出したL個の特徴量からL次元の特徴量ベクトルを構成した後に、受信信号のL次元特徴量ベクトルと各参照用目標の特徴量ベクトルとのユークリッド距離をそれぞれ計算し、最も距離の短い参照用目標と同じ種別であると判定する方法が考えられる。
最後に、表示部112は、目標検出部110、判定部111eの出力を表示する。
【0041】
この実施の形態1によれば、クラッタや人工物に対しても偏波情報の処理方法を更に増やし特徴量を把握し、散乱寄与率を元に人工物と目標とを識別することにより、目標検出に必要とするクラッタ抑圧フィルタ構築に使用するレンジプロフィールの精査できることで目標識別能力が向上すること、また複数偏波チャネルのレンジプロフィール間の関係を示す複数種類の指標を算出し、該特徴量を組み合わせて目標識別を行う構成としたので、目標を正しく識別する確率を向上することができることと、目標の識別に散乱行列レンジプロフィールから、目標の距離方向の移動とアスペクト角の変化による変動の小さい特徴量として、各偏波チャネルのレンジプロフィールの大まかな形状を示す複数種類の指標を使用することで、ライブラリメモリ量、計算処理量を減らすことができるという効果がある。
【0042】
実施の形態2.
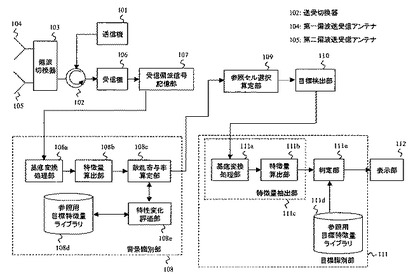
図3はこの発明の実施の形態2による目標識別用レーダ装置の構成を示すブロック図であり、108dは既知のクラッタ及び人工物に関する特徴量を蓄積している参照用背景特徴量ライブラリ、108eは散乱寄与率算定部108cにおいて算出されたクラッタ及び人工物の特徴量をもったセル毎の受信偏波プロフィールの空間的、時間的に変動する特性を、参照用背景特徴量ライブラリ108dに事前に蓄積された既知のクラッタ及び人工物に関する特徴量のライブラリと、事前に定められた規則に従って比較評価し、どのようなクラッタであるかを散乱寄与率算定部108cに出力する。散乱寄与率算定部108cは、特性変化評価部108dの結果に基づき、参照セルと注目セルを選定するための受信偏波プロフィールを参照セル選択算定部109に出力する。
【0043】
一般にクラッタは、レンジセルごとに、空間的に、時間的に変動することから、クラッタの偏波特性の特徴量は、事前に取得した参照用背景特徴量と異なることが予想できる。従って、逐次、散乱寄与率算定部108cの結果と参照用背景特徴量ライブラリ108dの特徴量データを比較し、特性変化を評価し、クラッタか目標かを識別することで、更にクラッタ抑圧フィルタを構築に必要となる参照セルを精査することができる。
【0044】
この実施の形態2によれば、風の影響によって揺らぎが生じる草原等に適したクラッタ抑圧フィルタを選択したり、全く空間的、時間的に変化のしなしアスファルト用フィルタ、砂など微粒物により揺らぎを検出することにより沿岸地域等の砂地に適したフィルタ等、目標を正しく検出し、識別する確率を向上するためのクラッタに合せたより精度を向上した閾値を設定できる効果を奏するとともに、クラッタの影響による目標の誤識別確率を低減する効果を奏する。
【図面の簡単な説明】
【0045】
【図1】この発明の実施の形態1による目標識別用レーダ装置の構成を示すブロック図である。
【図2】特徴量算出部で算出される特徴量のうち、平均、標準偏差、最大値および重心周りのモーメントの定義を示す説明図である。
【図3】この発明の実施の形態2による目標識別用レーダ装置の構成を示すブロック図である。
【符号の説明】
【0046】
101 送信機、 102 送受切換器、 103 偏波切換器、 104 第1偏波送受信アンテナ、 105 第2偏波送受信アンテナ、 106 受信機、 107 受信偏波信号記憶部、108 背景識別部、108a 基底変換処理部、 108b 特徴量算出部、 108c 散乱寄与率算定部、 108d 参照用目標特徴量ライブラリ、108e 特性変化評価部、109 参照セル選択算定部、110 目標検出部、 111 目標識別部、 111a 基底変換処理部、 111b 特徴量算出部、 111c 特徴量抽出部、 111d 参照用目標特徴量ライブラリ、 111e 判定部、112 表示部
【技術分野】
【0001】
この発明は、レーダの分野における目標のレンジプロフィールと偏波の情報を用いて目標を識別するレーダ装置に関するものである。
【背景技術】
【0002】
目標識別を行うレーダ装置に関する従来の技術として、高い距離分解能をもつレーダ装置において観測される目標のレンジプロフィールを利用して目標を識別するものがあり、識別の対象とする候補目標のレンジプロフィールを参照用レンジプロフィールとして予め蓄積しておくライブラリと、観測された目標レンジプロフィールとライブラリに蓄積された参照用レンジプロフィールの相関を計算する手段とを備え、観測された目標レンジプロフィールと相関の高い参照用レンジプロフィールがある場合、観測された目標はその参照用レンジプロフィールに対応する目標であると識別することが開示されている(例えば、非特許文献1参照。)。
【0003】
【非特許文献1】“Correlation Filters for Aircraft Identification From Radar Range Profiles”,IEEE Transactions on Aerospace and Electronic Systems,vol.29,no.3,pp.741-748,July 1993
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の目標識別用レーダ装置は以上のように構成されているが、目標の近隣に建造物がある場合や、目標周辺のクラッタが複雑形状である場合や、目標周辺のクラッタ状態(風による草原の揺らぎ)が変化しやすい状態の場合、ミリ波帯など波長の短い周波数帯を用いた場合、目標を誤識別するという問題が発生する。
【0005】
この発明は、上記のような課題を解決するためになされたもので、目標の近隣に建造物がある場合や、目標周辺のクラッタが複雑形状である場合や、目標周辺のクラッタ状態(風による草原の揺らぎ)が変化しやすい状態の場合、ミリ波帯などの目標の大きさに対して波長の短い周波数帯を用いた場合にも目標識別性能を向上することができる目標識別用レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る目標識別用レーダ装置は、広帯域パルスを発生して送信する送信機と、相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、上記特徴量を用いて目標の識別を行う目標識別部とを備えたものである。
【発明の効果】
【0007】
この発明によれば、偏波信号を元に生成したクラッタ及び人工物の偏波特性に合せてクラッタ主成分を抑圧するフィルタを構築し、取り扱う信号を選択すると共に、各偏波チャネルのレンジプロフィールの大まかな形状を示す複数種類の指標と、複数偏波チャネルのレンジプロフィール間の関係を示す複数種類の指標を算出し、特徴量を組み合わせて目標及び人工物を識別を行うことにより、目標を正しく検出、識別する確率を向上できるという効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1はこの発明の実施の形態1による目標識別用レーダ装置の構成を示すブロック図である。クラッタの偏波特性は、クラッタ形状や時間的に変換する状態によって大きく異なるため、想定されるあらゆるクラッタ環境に関して、あらゆるアスペクト角度及びあらゆるエレベーション角(電波の入射角)で観測した偏波特性を参照データとして用意し、これらを全て候補目標の偏波特性ライブラリに蓄積しておく必要がある。
一方、目標のレンジプロファイルは、目標のアスペクト角(目標の中心線とレーダの視線方向のなす角)に大きく依存するため、各候補目標に関して、あらゆるアスペクト角で観測したレンジプロフィールを参照データとして用意し、これらを全て候補目標レンジプロフィールのライブラリに蓄積しておく必要がある。
【0009】
しかしながら、この方法では、各候補となるクラッタ、人工物及び目標に関して、エレベーション角及びアスペクト角を非常に細かい刻みで変化させて参照データを作成して蓄積することが要求されるため、候補となるクラッタ、人工物及び目標の偏波特性のライブラリが膨大なものとなってしまう問題が発生する。候補となるクラッタ、人工物及び目標の偏波特性のライブラリを可能な限り小さくするためには、参照データとして蓄積しておくエレベーション角及びアスペクト角の刻みを大きくすることが望ましいが、今度は、候補となるクラッタ、人工物及び目標の偏波特性が、観測時のエレベーション角及びアスペクト角と完全に一致したデータを含まない場合に、人工物及び目標の識別性能が劣化する問題が発生する。そこでこの実施の形態では、特徴量を組み合わせて目標識別を行うことによって問題を解決する。
【0010】
そこで、目標及びクラッタ等に対するエレベーション角による偏波特性に着目して、3成分分解法に加えて、3成分散乱モデル分解法を用いて、クラッタ、人工物、目標の類別能力を高める。
【0011】
例えば、市街地におけるクラッタ及び人工物の偏波特性を把握でき、クラッタ主成分を抑圧するフィルタを構築できると共に、目標と人工物の類別フィルタを構築できる。市街地用フィルタ、草原用フィルタ、砂漠用フィルタ、アスファルト用フィルタ等、フィルタ選択が適切になり、目標検出確率が向上する。
市街地の偏波特性は、3成分分解法による評価では、エレベーション角によらず、奇数回反射成分及び偶数回反射成分の寄与率が50%でほぼ一定である。しかし、3成分散乱モデル分解法を用いた場合、エレベーション角が大きくなると(目標に近づく)2回反射成分が大きくなる傾向にある。これらを利用し、各種クラッタの中でビル群を類別し、また、目標とビル群を類別し、市街地クラッタ減算に適したフィルタを構築し、目標抽出類別能力を向上する。
また、3成分分解法による目標類別には、アスペクト角度感度の低い特徴量を抽出することが望ましい。従って、目標とビル群とを類別する場合、目標類別に有効と考えている奇数回反射成分と偶数回反射成分寄与率の重心周りのモーメント、多重反射成分寄与率の標準偏差以外の特徴量にて比較することが有効と考える。
【0012】
以下図1について説明する。
101はパルス信号を送信する送信機、102は送受信を切り換える送受切換器、103は偏波切換器、104は第2偏波送受信アンテナ105の偏波特性と直交する偏波特性を有する第1偏波送受信アンテナ、105は第1偏波送受信アンテナ104の偏波特性と直交する偏波特性を有する第2偏波送受信アンテナである。
【0013】
なお、第1偏波送受信アンテナ104及び第2偏波送受信アンテナ105における偏波特性が直交する組み合わせとして、例えば、垂直偏波と水平偏波の組み合わせや、右旋円偏波と左旋円偏波の組み合わせなどが考えられる。
【0014】
106は第1偏波送受信アンテナ104及び第2偏波送受信アンテナ105により受信された受信信号に対する位相検波とA/D変換処理を実施して、その偏波信号の振幅と位相を示すディジタルの受信偏波信号(以下、散乱行列レンジプロフィールという。散乱行列レンジプロフィールについては後述する)を出力する受信機である。
【0015】
107は受信機106から出力された散乱行列レンジプロフィールを蓄積する受信偏波信号記憶部、108は受信偏波信号記憶部より送られた散乱行列レンジプロフィールよりクラッタ及び人工物を識別する背景識別部、109はクラッタ及び人工物識別部から送られたレンジセル毎の散乱行列レンジプロフィールを元に、クラッタ主成分を抑圧するためのフィルタ係数を算出するための参照セルと注目セルを選択する参照セル選択算定部、110は参照セル選択算定部から送られた注目セル(目標)にフィルタを適用し、クラッタを抑圧して目標を検出し、検出された目標位置近傍の散乱行列レンジプロフィールの切り出しを行う目標検出部、111は目標検出部110によって切り出された散乱行列レンジプロフィールから複数の特徴量を算出し、ここで得られた特徴量を、事前に蓄積された既知の目標に関する特徴量のライブラリと比較することで目標を識別する目標識別部、112は目標の検出結果と識別結果を表示する表示部である。
【0016】
なお、108aは受信偏波信号記憶部107より送られた散乱行列レンジプロフィールに対して偏波基底変換処理を行い、複数偏波チャネルのレンジプロフィールを生成する偏波基底変換処理部、108bは108aによって得られた複数偏波チャネルレンジプロフィールより、クラッタ及び人工物の識別に利用する複数の特徴量を算出する特徴量算出部、108cは108bによって得られた3成分分解法及び3成分散乱モデル分解法による特徴量をもとに、奇数回反射成分及び偶数回反射成分の寄与率を算出する散乱寄与率算定部である。
【0017】
なお、111aは目標検出部110より送られた散乱行列レンジプロフィールに対して偏波基底変換処理を行い、複数偏波チャネルのレンジプロフィールを生成する偏波基底変換処理部、111bは111aによって得られた複数偏波チャネルレンジプロフィールより、識別に利用する複数の特徴量を算出する特徴量算出部、111cは偏波基底変換処理部111aと特徴量算出部111bを備える特徴量抽出部、111dは既知の目標に関する特徴量を蓄積している参照用目標特徴量ライブラリ、111eは特徴量抽出部111cで抽出された特徴量と参照用目標特徴量ライブラリ111dに蓄積された特徴量とから、事前に定められた規則に従って目標識別をおこなう判定部である
【0018】
次に、動作について説明する。
送信機101が広帯域パルスとしてパルス信号を生成すると、送受切換器102が当該パルス信号を偏波切換器103に送り、偏波切換器103が、第1偏波送受信アンテナ104を駆動することにより、そのパルス信号を第1偏波送受信アンテナ104から空間に放射させる。なお、以下では第1偏波送受信アンテナ104と第2偏波送受信アンテナ105の偏波特性が、それぞれ水平偏波と垂直偏波である場合について述べる。
【0019】
第1偏波送受信アンテナ104から空間に放射されたパルス信号は観測対象によって散乱される。
偏波切換器103は、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105の双方を駆動することにより、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105が観測対象によって散乱された散乱波をそれぞれ受信すると、第1偏波送受信アンテナ104と第2偏波送受信アンテナ105が受信信号を受信機106に送り、受信機106が第1偏波送受信アンテナ104と第2偏波送受信アンテナ105において受信された受信信号のそれぞれに対する位相検波処理とA/D変換処理を実施して、それぞれの受信信号の振幅と位相を示すディジタル受信信号S11(m),S21(m)を出力する。
【0020】
なお、Sij(m)は、第j偏波送受信アンテナで送信して第i偏波送受信アンテナで受信された受信信号のm番目(m=1,2,・・・,M)のサンプル値である。ここで、Mはサンプル数である。同様に、送信機101で生成した広帯域パルスを、送受切換器102を介して偏波切換器103に送り、これを第2偏波送受信アンテナ105から目標に照射して第1偏波送受信アンテナ105と第2偏波送受信アンテナ106において受信された受信信号同様の処理を繰り返すことにより、受信信号S12(m),S22(m)を得る。
【0021】
受信偏波信号記憶部107は、得られた受信信号S11(m),S21(m),S12(m),S22(m)を一時蓄積し、蓄積された信号は、観測対象に関する各分解能セルに散乱行列Sm(m=1,2,・・・,M)の値をもつ散乱行列レンジプロフィールであり、式(1)のように表される。
なお、以下では、送信アンテナと受信アンテナの偏波状態の組み合わせのことを偏波チャネルと呼ぶことがある。
【0022】
【数1】
【0023】
基底変換処理部108aは、受信偏波信号記憶部107に蓄積された散乱行列レンジプロフィールSm(m=M0,M0+1,・・・,M0+MT-1)に対し、式(2)に例示する3成分分解法及び静止分散乱モデル分解法を用いて偏波成分分解を行う。
【0024】
例えば式(2)で示す偏波成分分解を用いて、受信波のうち、目標物において奇数回反射された後に送受信アンテナに到達した奇数回反射成分Ko(m)、目標物において偶数回反射された後に送受信アンテナに到達した偶数回反射成分Ke(m)、目標で反射される際に生じた、入射波と直交する偏波成分(交差成分)Kc(m)を求める。
【0025】
【数2】
【0026】
以上のように、種々の偏波基底変換や偏波成分分解を行うことにより、任意の種類の偏波チャネルについてレンジプロフィールを得ることが可能である。
ここで得られたレンジプロフィールの組を、以下ではクラッタ及び人工物の複数偏波チャネルレンジプロフィールと呼ぶ。なお、ここでは、「偏波チャネル」は送信偏波と受信偏波の組み合わせだけでなく、Ko,Ke,Kcなどの偏波成分のことも含むこととする(以下同様)。
次に、特徴量算出部108bは、上記の基底変換処理によって得られた複数偏波チャネルレンジプロフィールから、以下に定義する特徴量を算出する。
【0027】
次に、散乱寄与率算定部108cは、3成分分解法及び3成分散乱モデル分解能法により算出された特徴量を元に、奇数回反射成分、偶数回反射成分、多重反射成分等の構成比を解析し、クラッタ並びに人工物と目標とを類別する。
【0028】
次に、参照セル選択算定部109は、散乱寄与率算定部から人工物と目標とを類別した結果に基づく注目セルと、クラッタ係数を算出、決定し、クラッタを抑圧するためのフィルタ構築に使用する参照セルとを選択、決定する。
【0029】
次に、目標検出部110は参照セル選択算定部から出力された散乱行列レンジプロフィールから、目標を検出する。目標検出部110は検出された目標位置近傍のサンプルSm(m=M0,M0+1,・・・,M0+MT-1)を切り出す。
【0030】
基底変換処理部111aは、目標検出部110において切り出された目標の散乱行列レンジプロフィールSm(m=M0,M0+1,・・・,M0+MT-1)に対し、式(2)に例示する偏波成分分解を行う。
【0031】
次に、特徴量算出部111bは、上記の基底変換処理によって得られた複数偏波チャネルレンジプロフィールから、以下に定義する特徴量を算出する。
【0032】
【数3】
【0033】
式(3)において、P(m)はある偏波チャネルの信号の電力値を表しており、例えば、水平偏波送信水平偏波受信の偏波チャネルについては、式(4)のように定義される。rgは重心であり、式(5)のように定義される。Xpは偏波チャネルpのレンジプロフィールのフーリエスペクトルを表す。
【0034】
式(3)において、2次と3次のクロスモーメントスペクトルは、それぞれ偏波チャネル1と2と偏波チャネル1と2と3とで例示してあるが、基底変換処理部109aで得られた全ての偏波チャネルの組み合わせについて計算することが可能である。
【0035】
【数4】
【0036】
図2は特徴量算出部で算出される特徴量のうち、平均、標準偏差、最大値および重心周りのモーメントの定義を示す説明図である。
特徴量は特徴量算出部111bで算出され、平均値は各偏波チャネルの平均的な反射強度、最大値は最大の反射強度、標準偏差は各偏波チャネルのレンジプロフィール形状の複雑さ、重心周りのモーメントは主にレンジプロフィールの長さを表す指標となっていることがわかる。
【0037】
さらに、式(3)より、正規化された重心周りのモーメントとバイスペクトルはレンジプロフィール上での散乱強度の強い点の分布の様子、クロスモーメントスペクトルは複数偏波チャネルのレンジプロフィール間の関係をそれぞれ示す指標となっていると言える。以上をまとめると、式(3)に示した特徴量は、各偏波チャネルのレンジプロフィールの大まかな形状を示す指標と、複数偏波チャネルのレンジプロフィール間の関係を示す指標に大別できる。
【0038】
参照用目標特徴量ライブラリ111dには、同様にして事前に観測したN種類の目標の散乱行列レンジプロフィールより抽出された特徴量が格納されている。Smnは事前の観測の他に、理論計算(例えば、GTD:Geometrical Theory of Diffraction)などから得ることも可能である。
【0039】
判定部111eは、参照用目標特徴量ライブラリ111dに蓄積されたN種類の目標に関する特徴量と比較を行い、あらかじめ定められた規則に従って目標の識別を行う。
【0040】
例えば、識別に利用する特徴量の数がLの場合、各目標に関するL個の特徴量をL次元の特徴量ベクトルの形で参照用目標特徴量ライブラリ111dに蓄積しておき、受信信号から抽出したL個の特徴量からL次元の特徴量ベクトルを構成した後に、受信信号のL次元特徴量ベクトルと各参照用目標の特徴量ベクトルとのユークリッド距離をそれぞれ計算し、最も距離の短い参照用目標と同じ種別であると判定する方法が考えられる。
最後に、表示部112は、目標検出部110、判定部111eの出力を表示する。
【0041】
この実施の形態1によれば、クラッタや人工物に対しても偏波情報の処理方法を更に増やし特徴量を把握し、散乱寄与率を元に人工物と目標とを識別することにより、目標検出に必要とするクラッタ抑圧フィルタ構築に使用するレンジプロフィールの精査できることで目標識別能力が向上すること、また複数偏波チャネルのレンジプロフィール間の関係を示す複数種類の指標を算出し、該特徴量を組み合わせて目標識別を行う構成としたので、目標を正しく識別する確率を向上することができることと、目標の識別に散乱行列レンジプロフィールから、目標の距離方向の移動とアスペクト角の変化による変動の小さい特徴量として、各偏波チャネルのレンジプロフィールの大まかな形状を示す複数種類の指標を使用することで、ライブラリメモリ量、計算処理量を減らすことができるという効果がある。
【0042】
実施の形態2.
図3はこの発明の実施の形態2による目標識別用レーダ装置の構成を示すブロック図であり、108dは既知のクラッタ及び人工物に関する特徴量を蓄積している参照用背景特徴量ライブラリ、108eは散乱寄与率算定部108cにおいて算出されたクラッタ及び人工物の特徴量をもったセル毎の受信偏波プロフィールの空間的、時間的に変動する特性を、参照用背景特徴量ライブラリ108dに事前に蓄積された既知のクラッタ及び人工物に関する特徴量のライブラリと、事前に定められた規則に従って比較評価し、どのようなクラッタであるかを散乱寄与率算定部108cに出力する。散乱寄与率算定部108cは、特性変化評価部108dの結果に基づき、参照セルと注目セルを選定するための受信偏波プロフィールを参照セル選択算定部109に出力する。
【0043】
一般にクラッタは、レンジセルごとに、空間的に、時間的に変動することから、クラッタの偏波特性の特徴量は、事前に取得した参照用背景特徴量と異なることが予想できる。従って、逐次、散乱寄与率算定部108cの結果と参照用背景特徴量ライブラリ108dの特徴量データを比較し、特性変化を評価し、クラッタか目標かを識別することで、更にクラッタ抑圧フィルタを構築に必要となる参照セルを精査することができる。
【0044】
この実施の形態2によれば、風の影響によって揺らぎが生じる草原等に適したクラッタ抑圧フィルタを選択したり、全く空間的、時間的に変化のしなしアスファルト用フィルタ、砂など微粒物により揺らぎを検出することにより沿岸地域等の砂地に適したフィルタ等、目標を正しく検出し、識別する確率を向上するためのクラッタに合せたより精度を向上した閾値を設定できる効果を奏するとともに、クラッタの影響による目標の誤識別確率を低減する効果を奏する。
【図面の簡単な説明】
【0045】
【図1】この発明の実施の形態1による目標識別用レーダ装置の構成を示すブロック図である。
【図2】特徴量算出部で算出される特徴量のうち、平均、標準偏差、最大値および重心周りのモーメントの定義を示す説明図である。
【図3】この発明の実施の形態2による目標識別用レーダ装置の構成を示すブロック図である。
【符号の説明】
【0046】
101 送信機、 102 送受切換器、 103 偏波切換器、 104 第1偏波送受信アンテナ、 105 第2偏波送受信アンテナ、 106 受信機、 107 受信偏波信号記憶部、108 背景識別部、108a 基底変換処理部、 108b 特徴量算出部、 108c 散乱寄与率算定部、 108d 参照用目標特徴量ライブラリ、108e 特性変化評価部、109 参照セル選択算定部、110 目標検出部、 111 目標識別部、 111a 基底変換処理部、 111b 特徴量算出部、 111c 特徴量抽出部、 111d 参照用目標特徴量ライブラリ、 111e 判定部、112 表示部
【特許請求の範囲】
【請求項1】
広帯域パルスを発生して送信する送信機と、
相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、
上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、
上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、
上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、
検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、
上記特徴量を用いて目標の識別を行う目標識別部と、
を備えた目標識別用レーダ装置。
【請求項2】
上記背景識別部として、受信した複数の受信偏波信号から複数の偏波チャネル信号を算出し、背景の特徴量を算出することを特徴とする請求項1記載の目標識別用レーダ装置。
【請求項3】
上記背景識別部は、クラッタ、人工物及び目標に対する電波の入射角による偏波特性を比較することで、クラッタの種類、人工物及び目標の類別することを特徴とする請求項1または2記載の目標識別用レーダ装置。
【請求項1】
広帯域パルスを発生して送信する送信機と、
相互に偏波特性の異なる複数のアンテナを用いて複数の偏波信号を受信し、上記偏波信号の振幅と位相を示す散乱行列レンジプロフィールを出力する受信機と、
上記散乱行列レンジプロフィールを用いて、目標の背景箇所の偏波特徴を算出する背景識別部と、
上記偏波特徴に基づき最適なフィルタを選択する参照セル選択算定部と、
上記フィルタによってクラッタを抑圧し、上記目標を検出する目標検出部と、
検出された上記目標近傍の散乱行列レンジプロフィールを用いて複数の特徴量を算出する特徴量抽出部と、
上記特徴量を用いて目標の識別を行う目標識別部と、
を備えた目標識別用レーダ装置。
【請求項2】
上記背景識別部として、受信した複数の受信偏波信号から複数の偏波チャネル信号を算出し、背景の特徴量を算出することを特徴とする請求項1記載の目標識別用レーダ装置。
【請求項3】
上記背景識別部は、クラッタ、人工物及び目標に対する電波の入射角による偏波特性を比較することで、クラッタの種類、人工物及び目標の類別することを特徴とする請求項1または2記載の目標識別用レーダ装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−38744(P2010−38744A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−202688(P2008−202688)
【出願日】平成20年8月6日(2008.8.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月6日(2008.8.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]