
目標軌道算出装置
【課題】直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める。
【解決手段】カメラ撮影部2の撮影で検出される障害物αが2円軌道モデルで算出された目標軌道に存在する場合に、軌道計算部5により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道を算出して決定し、障害物αを回避して車両1の自動駐車等を行なう。
【解決手段】カメラ撮影部2の撮影で検出される障害物αが2円軌道モデルで算出された目標軌道に存在する場合に、軌道計算部5により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道を算出して決定し、障害物αを回避して車両1の自動駐車等を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動駐車等の車両の目標軌道を算出する目標軌道算出装置に関し、詳しくは、障害物を回避した目標軌道の算出に関する。
【背景技術】
【0002】
従来、とくに高齢者や初心者などに望まれる車両の制御システムとして自動駐車システムがある。この自動駐車システムにおいては、目標軌道に沿って車両を移動するため、自車の目標軌道をどのような軌道計画にしたがって求めるかが重要である。
【0003】
そして、自動駐車の車庫入れの軌道計画手法として、従来、以下に説明する2種類の「直線と円弧を用いた軌道計画手法」(以下、これらの軌道計画手法を従来手法1、2という)が提案されている(例えば、特許文献1及び非特許文献1、2参照)。
【0004】
従来手法1、2の軌道計画手法について説明すると、従来手法1、2においては、前提として、カメラ、レーダのようなセンサの検出やドライバの操作入力等により、少なくとも現在の車両位置(開始位置)からの駐車の目標位置の相対位置データが既知であることを前提とする。また、目標軌道は切返しを極力行なわないように設定される。
【0005】
(従来手法1)
そして、従来手法1について説明すると、従来手法1は車両の両側に円を描いて目標軌道Tiを求める2円軌道モデルの軌道計画手法である。
【0006】
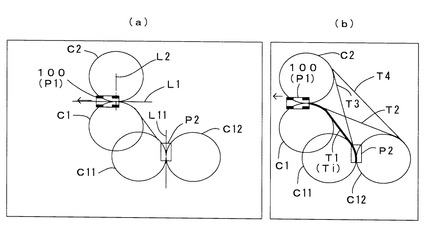
図13(a)は車庫入れの自動駐車を行なう際の従来手法1の軌道計画の説明図であり、車両100が指定された開始位置(現在位置)P1から駐車の目標位置P2に旋回しながら後退して駐車する車庫入れ場合、従来手法1においては、作図処理において、はじめに、矢印線に示すように紙面左右方向を前後方向とする向きに開始位置P1に止まっている車両100について、車幅方向中央を通る直線L1を引き、さらに、左右の後輪を通る直線L2を引く。そして、直線L1、L2の交点で接する直線L1の2接円(半径の長さは、任意であってよいが、ここでは車両100の最小回転半径とする)C1、C2を、車両100の両側(旋回側とその反対側)に描いて作成する。
【0007】
つぎに、紙面上下方向を前後方向とする向きの目標位置P2について、上記の開始位置P1での作図手法と同様の手法で直線L1に対応する直線L11の2接円(半径の長さは、車両100の最小回転半径以上であれば任意の長さであってよいが、ここでは車両100の最小回転半径の長さとする)C11、C12を、両側(車両100の旋回側とその反対側)に描いて作成する。
【0008】
つぎに、作成した4つの接円C1、C2、C11、C12について、開始位置P1の接円C1、C2と目標位置P2の接円C11、C12とを結ぶ図13(b)の4本の接線T1〜T4を作成し、そのうちの切返しなく開始位置P1から目標位置P2に移動できる最短経路の接線T1、すなわち、開始位置P1、目標位置P2それぞれの旋回側に描いた円C1、C11に接する接線(直線)T1を車両100の車庫入れの目標軌道Tiに選択して決定する。
【0009】
図13(b)は求められた目標軌道Tiを示し、車庫入れの目標軌道Tiに選択して決定された接線T1を、残りの接線T2〜t4より太くしている。
【0010】
(従来手法2)
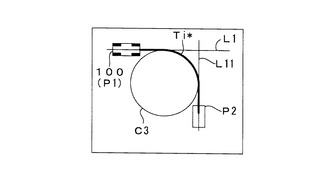
つぎに、従来手法2について説明すると、従来手法2は車両100の旋回側に1円を描いて目標軌道Ti*を求める1円軌道モデルの軌道計画手法である。
【0011】
図14は前記2円軌道モデルの場合と同様に車両100が開始位置(現在位置)P1から目標位置P2に旋回しながら後退して車庫入れの駐車を行なう場合の軌道計画の説明図であり、作図処理において、開始位置P1の車両100の車幅方向中央を通る紙面左右方向の直線L1を引き、目標位置P2の車幅方向中央を通る紙面上下方向の直線L11も引く。さらに、2つの直線L1、L11に接する1つの円(半径の長さは、車両100の最小回転半径以上であれば任意の長さであってよいが、ここでは車両100の最小回転半径の長さとする)C3を作成する。そして、直線L1の一部、円C3の円弧、直線L2の一部の組み合わせからなる図14の太線を車庫入れの目標軌道Ti*に決定する。
【0012】
そして、従来手法1、2によって決定された目標軌道Ti、Ti*に沿って車両100の走行、操舵を制御し、車両100を旋回しながら後退移動することで、車両100を自動的に開始位置P1から目標位置P2に移動して自動駐車を実現することが可能になる。なお、走行距離の短縮や制御のし易さ等を考慮すると、従来手法1(2円軌道モデル)によって決定する目標軌道Tiが、従来手法2(1円軌道モデル)によって決定する目標軌道Ti*より優れている。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2008−296638号公報
【非特許文献】
【0014】
【非特許文献1】辻澤 隆彦、“自動パーキングのための経路生成方法の提案”、日本機械学会論文集(C編)73巻729号(2007−5)、論文No.06−7043
【非特許文献2】ダオ ミン クアン、外2名、“自動車の自動駐車技術の実用化に関する研究”計測自動制御学会論文集、Vol.42、No7、765/774(2006)
【発明の概要】
【発明が解決しようとする課題】
【0015】
前記した従来手法1、2により目標軌道Ti、Ti*を求める目標軌道算出装置を車両100に搭載した場合、従来手法1、2で求められる目標軌道Ti、Ti*は障害物を考慮していないので、目標軌道Ti、Ti*上の障害物を回避して車庫入れの自動駐車を実現することができない。
【0016】
そして、自動駐車の場合だけでなく、目標軌道Ti、Ti*に沿って車両100を旋回しながら前進、後退して開始位置P1から目標位置P2のような種々の目標位置に自動制御する場合には、障害物を回避して目標軌道を決定することが望まれるが、従来手法1、2のような直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める構成は発明されていない。
【0017】
本発明は、直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める構成を提供することを目的とする。
【課題を解決するための手段】
【0018】
上記した目的を達成するために、本発明の目標軌道算出装置は、指定された開始位置から目標位置に旋回しながら移動する車両の目標軌道を、前記開始位置、前記目標位置それぞれの旋回側に描いた円の弧と該両円に接する直線とから算出する2円軌道モデルの目標軌道算出装置であって、前記車両の周囲の障害物を検出する検出手段と、前記障害物が前記目標軌道に存在する場合に、前記開始位置、前記目標位置のいずれか一方の延長線上に仮位置を設け、前記仮位置の旋回側に描いた円の円弧と、前記開始位置、前記目標位置のいずれか他方の旋回側に描いた円の円弧と、該両円に接する直線とから、前記目標軌道として前記障害物を回避する修正軌道を算出する修正軌道算出手段を備えたことを特徴としている(請求項1)。
【発明の効果】
【0019】
請求項1に記載の本発明の目標軌道算出装置によれば、従来手法1(1円軌道モデルの軌道計画手法)で目標軌道を決定すると、その軌道上に障害物が存在することになる場合に、修正軌道算出手段により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道(修正された目標軌道)を算出して決定することができる。
【0020】
そして、修正軌道に沿って車両を開始位置から目標位置に旋回して移動すると、障害物を回避して車両を自動駐車できる。
【0021】
したがって、直線と円弧を用いた簡単な軌道計画手法で障害物を回避した軌道を求め、障害物を回避した自動駐車等を実現することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の目標軌道算出装置の一実施形態のブロック図である。
【図2】(a)、(b)は左バック駐車、右バック駐車の説明図である。
【図3】目標位置に駐車した状態の説明図である。
【図4】軌道上に障害物が存在する可能性がある領域の説明図である。
【図5】軌道に障害物が存在する場合の説明図である。
【図6】仮位置の説明図である。
【図7】仮位置の設定範囲の説明図である。
【図8】(a)、(b)は仮位置を用いて提案手法1で算出した修正軌道の一例、他の例の説明図である。
【図9】仮位置を用いて提案手法2で算出した修正軌道の一例の説明図である。
【図10】仮位置を用いて提案手法2で算出した修正軌道の他の例の説明図である。
【図11】仮位置を用いて提案手法2で算出した修正軌道のさらに他の例の説明図である。
【図12】図1の動作説明用のフローチャートである。
【図13】(a)、(b)は従来の軌道計算の一例の説明図である。
【図14】従来の軌道計算の他の例の説明図である。
【発明を実施するための形態】
【0023】
本発明の一実施形態について、図1〜図12を参照して説明する。
【0024】
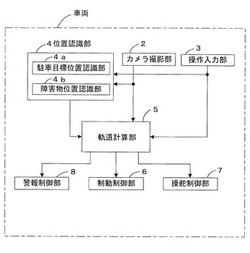
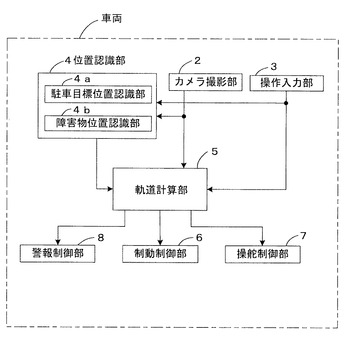
図1に示す本実施形態の目標軌道算出装置は、車両1に搭載されて車両1の前方及び後方を撮影可能なカメラ撮影部2と、ドライバの操作を受け付ける操作入力部3と、自動駐車等の後退するシーンでは基本的にカメラ撮影部2の後方の撮影画像をタッチパネル表示器(図示せず)に画面表示してドライバのタッチ操作で指定された自車後方の駐車目標位置、障害物位置を認識する位置認識部4と、カメラ撮影部2の撮影画像及び位置認識部4の駐車目標位置認識部4a、障害物位置認識部4bの認識結果に基づき、目標軌道や修正軌道を算出する軌道計算部5と、軌道計算部5の計算結果に基づき制動制御、操舵制御、警報制御それぞれを行なう制動制御部6、操舵制御部7、警報制御部8を備える。なお、各部3〜8はマイクロコンピュータのECUで形成され、それぞれ設定されたプログラムにしたがって動作し、カメラ撮影部2、位置認識部4は、本発明の検出手段を形成し、軌道計算部5は本発明の修正軌道算出手段を形成する。
【0025】
そして、カメラ撮影部2は、夜間等の周囲環境が暗いシーンにおける後方撮影時には、例えば所定の照明を作動して自車1の後方を撮影し、夜間等の周囲環境が暗いシーンにおける前方撮影時には、ヘッドランプを照明として自車1の前記後方を撮影し、毎フイールドに最新の撮影画像を位置認識部4、軌道計算部5に送る。
【0026】
カメラ撮影部2の撮影画像を取り込んだ位置認識部4は、ダッシュボードのタッチパネル表示器の液晶画面に撮影画像を表示する。この撮影画像は、自車1が後退するシーンでは後方の撮影画像であり、自車1が前進するシーンでは前方の撮影画像である。そして、例えば自車1が後退する自動駐車の場合、後方の撮影画像の液晶画面を見たドライバが、画面に写っている後方の目標駐車位置及び障害物(信号機、壁等の静止物体及び、2輪車等の移動物体を含む)αを指定し、その指定情報が操作部3から入力されると、駐車目標位置認識部4a、障害物位置認識部4bの周知の画像処理により、目標駐車位置、障害物αを検出してカメラ撮影部2の位置に対する相対的な目標駐車位置、障害物位置を算出し、目標駐車位置、障害物位置の相対位置の情報を軌道計算部5に送る。なお、目標駐車位置、障害物位置の情報は、ドライバの再指定や自動駐車の完了があるまで、軌道計算部5に有効なものとして保持される。
【0027】
そして、軌道計算部5はつぎに説明するようにして、自動駐車の制御に必要な目標軌道Ti又は修正軌道Tj、Tkを算出し、算出結果に基づき、必要な制動、操舵の制御を制動制御部6、操舵制御部7に指令する。障害物αを回避できないときは、自動駐車の制御を行わず、その旨の警報発生を警報制御部8に指令する。
【0028】
<軌道計算部5の軌道計算処理>
軌道計算部5においては、初期の軌道計画には前記した従来手法1を採用し、それによって得られた目標軌道Ti上に障害物αがある場合に目標軌道Tiを修正して障害物αを回避する。
【0029】
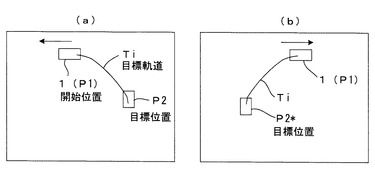
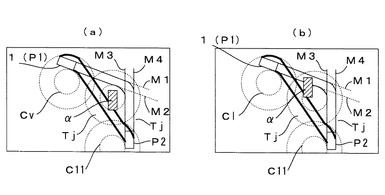
ところで、車両1が開始位置P1の後ろの前進方向に向かって左側にある駐車の目標位置P2に後退走行して車庫入れを行なう駐車を「左バック駐車」、開始位置P1から進行方向に向かって右側にある駐車目標位置P2*に後退走行して車庫入れを行なう駐車を「右バック駐車」とすると、図2(a)が「左バック駐車」、同図(b)が「右バック駐車」である。図2(a)、(b)において、車両1は矢印線方向が前進方向であり、開始位置P1と目標位置P2、P2*を結ぶ太い実線が従来手法1で得られる目標軌道Ti(図(b)の接線T1に相当)である。
【0030】
本発明は、「左バック駐車」、「右バック駐車」のいずれの自動駐車にも適用できるが、いずれか一方の自動駐車の場合について説明すれば、他方の自動駐車については、旋回の向きが逆になるだけであり、同様に制御できることが容易に分かる。そこで、本実施形態においては、「左バック駐車」について説明する。
【0031】
まず、障害物αの位置によって最適な回避軌道が異なるため、軌道計算部5は、障害物の位置別に回避方法を分類して記憶し、障害物αの位置の分類に応じて修正軌道の算出等を行なう。
【0032】
すなわち、軌道計算部5は、まず、前記したように従来手法1で目標軌道Tiを計算する。具体的には、図2(a)の「左バック駐車」で車庫入れの駐車を行なう場合、はじめに、図2(a)の向きに開始位置P1に止まっている車両1について、車幅方向中央を通る直線と左右の後輪を通る直線の交点で接する2接円(半径の長さは、例えば車両1の最小回転半径)を、開始位置(車両1の現在位置)P1の旋回側とその反対側の両側に描いて作成する。つぎに、開始位置P1の後方の紙面上下方向の向きの駐車目標位置P2について、開始位置P1での作図手法と同様の手法で2接円(半径の長さは、例えば車両1の最小回転半径)を、目標位置P2の両側に描いて作成する。そして、作成した4つの接円についての図13(b)の接線T1〜T4のような4本の接線を作成し、そのうちの切返しなく開始位置P1から目標位置P2に移動できる、開始位置P1、目標位置P2それぞれの旋回側に描いた円に接する接線(直線)を目標軌道Tiに選択する。
【0033】
そして、目標軌道Tiに沿って車両1が旋回しながら後退する状態をシミュレーションして、自車1の軌道と障害物αとの当たり(重なり)の判定を行う。このとき、目標軌道Tiの軌道幅内に障害物αがなく、自車1が障害物αに全く当たらなければ、目標軌道Tiを自動駐車の軌道に決定する。
【0034】
一方、目標軌道Tiの軌道幅内に障害物αがあり、自車1が障害物αに接触して当たると判定した場合は、軌道計算部5は、障害物αが存在する領域に応じた軌道計画の修正を行う。
【0035】
障害物αの位置の分類について説明すると、本実施形態の場合、最初の軌道計算では従来手法1を用いるため、回転半径一定の円が2つ(ともに最小回転半径の円)と直線(接線)との組み合わせで目標軌道Tiが決まる。
【0036】
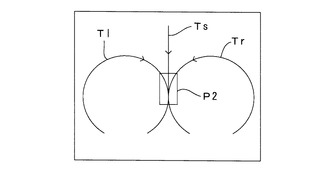
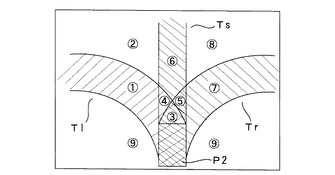
そして、「左バック駐車」だけでなく「右バック駐車」も考慮すると、目標位置P2に到達する際、車両1は左旋回、右旋回、直進のいずれかの後退で移動する可能性がある。図3はこれらの場合の軌道Tl、Ts、Trを模式的に示し、図4はそれらの軌道Tl、Ts、Trを軌道幅(概ね車幅に相当)を考慮した幅の斜線部で拡大して示し、障害物αが存在する可能性がある領域は軌道Tl、Ts、Trの内外の○印を付した1〜9の数字の各領域である。
【0037】
図4の○印を付した1、3、4、5、6、7の領域は軌道Tl、Ts、Tr内の領域であって、これらの領域に障害物αがあれば、車両1と障害物αが確実に接触する。図4の○印を付した9の領域の障害物αについては車両1が接触することはない。図4の○印を付した2、8の領域の障害物αについては、その位置によって車両1が接触する可能性がある。
【0038】
そして、「左バック駐車」で車庫入れの駐車を行なう本実施例の場合、右旋回することはないので、車両1は、図4の○印を付した9の領域及び7、8の領域にある障害物αと接触することはなく、1、2、3、4、5、6の領域にある障害物αとのみ接触する可能性があり、軌道計算部5は、これらの場合に自車1が障害物αに接触して当たると判定する。
【0039】
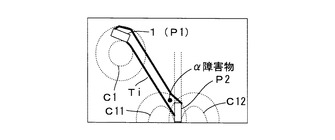
(障害物αが図4の○印を付した1の領域にある場合)
図5は障害物αが図4の○印を付した1の領域にある場合の例を示し、この例の場合、最初の従来手法1の軌道計算によって得られた目標軌道Tiの1の領域に障害物αが存在する。図5においては、円C1、C11、C12それぞれに同心状に車幅分大きな円も描き、目標軌道Tiを軌道幅(概ね車両1の車幅)を示す2本の実線で示している。
【0040】
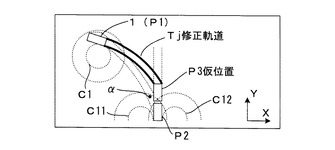
そして、自車1が障害物αに接触して当たると判定した軌道計算部5は、図6に示すように、駐車目標位置P2の前方の延長線上に、障害物αにかからないように仮の目標位置としての本発明の仮位置P3を設定し、仮位置P3を経由する修正軌道Tjを算出して障害物αを回避する。この手法を提案手法1として、以下にさらに具体的に説明する。
【0041】
図6は提案手法1の仮位置P3に基づく修正軌道Tjを示し、仮位置P3は、そこから真直ぐ後退すれば目標位置P2に到達できる目標位置P2の前方の延長線上の位置である。同図に示すように紙面の左右方向をX方向、紙面の上下方向をY方向とすると、仮位置P3は、駐車目標位置P2からY方向に設定された一定距離ずつずらして設定され、設定される都度、車両1が現在停止している開始位置P1から仮位置P3に至る修正軌道Tjを、仮位置P3を目標位置P2として、従来手法1により、仮位置P3の旋回側に描いた円の円弧と、開始位置P1の旋回側に描いた円C1の円弧と、両円に接する直線とから算出して求め、その軌道Tj内に障害物αがあるか否か、すなわち、障害物αを回避可能か否かを判定し、回避可能であればその修正軌道Tjを目標軌道Tiに代わる軌道に決定する。
【0042】
なお、仮位置P3を設定できる範囲は限定される。そして、限定された範囲内で仮位置P3をずらしても障害物αを回避できない場合は、提案手法1では障害物αを回避できないので自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0043】
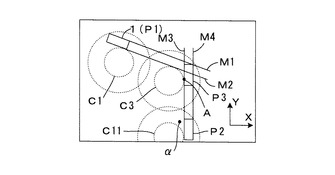
図7は仮位置P3を設定できる範囲を示す。同図に示すように開始位置P1から真直ぐに直進後退する車両1の車幅の間隔の軌道線M1、M2を求める。つぎに、真直ぐに後退して目標位置P2に到達できる、同様の間隔の軌道線M3、M4を求める。円C1を軌道線M2に沿って仮位置P3方向にずらして軌道線M2、M3と接する位置に円C1と同じ大きさの円C3を配置する。このとき生じる円C3と軌道線M3の接点Aが車両1の後輪軸上になる位置まで、換言すれば、A点がY方向に円C1の開始位置P1の接点と同じ位置になるまで、仮位置P3をY方向にずらすことができる。そして、この限界の位置から目標位置P2までの範囲が、仮位置P3の設定可能な範囲であり、仮位置P3は、Y方向に開始位置P1より駐車目標位置P2寄りに設定される。そうしないと、切返しや旋回方向の変更が必要になって制御が複雑になるからである。
【0044】
(障害物αが図5の○印を付した2の領域にある場合)
図8(a)、(b)は、障害物αが図5の○印を付した2の領域にある場合の例それぞれを示す。図8(a)の例は、障害物αの位置の駐車目標位置P2からのY方向のずれが大きくなく、提案手法1で回避できる場合であり、図8(b)の例は、障害物αの位置が駐車目標位置P2からY方向に比較的大きくずれていて提案手法1では回避できない場合である。
【0045】
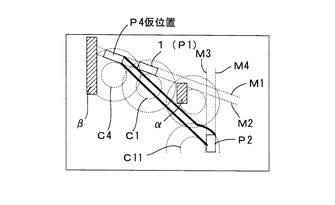
そこで、障害物αが図5の○印を付した2の領域にある場合、軌道計算部5は、まず、提案手法1の軌道修正を試み、修正軌道Tjによって障害物αを回避できるか否かを判定する。その間に回避できるとする判定が発生すると、その修正軌道Tjを自動駐車の軌道に決定する(図8(a)の場合)。一方、提案手法1の軌道修正を試みて障害物αを回避できないと判定すると(図8(b)の場合)、つぎに説明する提案手法2によって修正軌道Tkを作成し、修正軌道Tkによって障害物αを回避できるか否かを判定する。
【0046】
図9は提案手法2の仮の目標位置P4に基づく修正軌道Tkを示し、提案手法2では同図に示すように、開始位置P1の前方の延長線上に仮位置P4を設定する。この場合、自車1が前進するシーンでは、カメラ撮影部2の前方の撮影画像が取り込まれれ、位置認識部4がダッシュボードのタッチパネル表示器の液晶画面に前方の撮影画像を表示する。また、仮位置P4は、開始位置P1から車両1を前進方向に一定距離ずつずらして設定され、設定される都度、仮位置P4から目標位置P2までの修正軌道Tkを、仮位置P4を開始位置P1とし、従来手法1により仮位置P4の旋回側に描いた円C4の円弧と、目標位置P2の旋回側に描いた円C11の円弧と、両円C4、C11に接する直線とから算出して求め、その軌道Tkによって障害物αを回避可能か否かを判定し、回避可能であれば、修正軌道Tkを目標軌道Tiに代わる軌道に決定する。
【0047】
なお、仮位置P4は、例えばカメラ撮影部2の前方の撮影画像をみてドライバが指定した他の障害物βに接触しない範囲で前進方向に一定距離ずつずらして開始位置P1の延長線上に設定すことができ、その範囲で障害物αを回避できない場合は、提案手法2では障害物αを回避できないので自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0048】
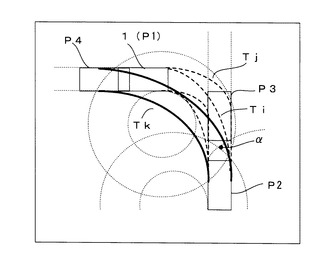
(障害物αが図5の○印を付した5の領域にある場合)
図10は障害物αが図5の○印を付した5の領域にある場合の例を示し、この例の場合も最初の従来手法1の軌道計算によって得られた目標軌道Ti内に障害物αが存在するので、軌道計算部5は、まず、提案手法1の軌道修正を試み、修正軌道Tjによって障害物αを回避できるか否かを判定する。回避できると判定すれば、その修正軌道Tjに決定し、する。一方、提案手法1を試みても障害物αを回避できないと判定すると、この例の場合も提案手法2によって修正軌道Tkを作成し、修正軌道Tkによって障害物αを回避できるか否かを判定する。
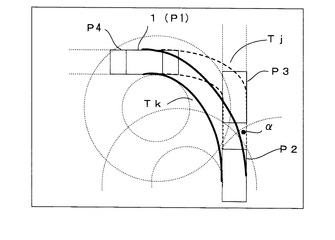
【0049】
図11は前記5の領域の障害物αが回避できる修正軌道Tkの例を示し、修正軌道Tkによって障害物αを回避可能であれば、その修正軌道Tkを目標軌道Tjに代わる軌道に決定する。
【0050】
(障害物αが図5の○印を付した3,4の領域にある場合)
この場合は、障害物αが目標駐車位置P2の前方近傍の開始位置P1寄りの位置に存在し、提案手法1、2の修正軌道Tj、Tkのいずれによっても障害物αを回避できない。そこで、自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0051】
そして、軌道計算部5の上記した軌道計算に基づき、修正軌道Tj、Tkによって障害物αを回避可能な場合、自動駐車の制御により、制動制御部6による制動、操舵制御部7の旋回制御により、修正軌道Tj、Tkに沿うように車両1を旋回しつつ後退移動し、切返しなく、障害物αを回避して車両1を目標位置P2に移動して駐車する。
【0052】
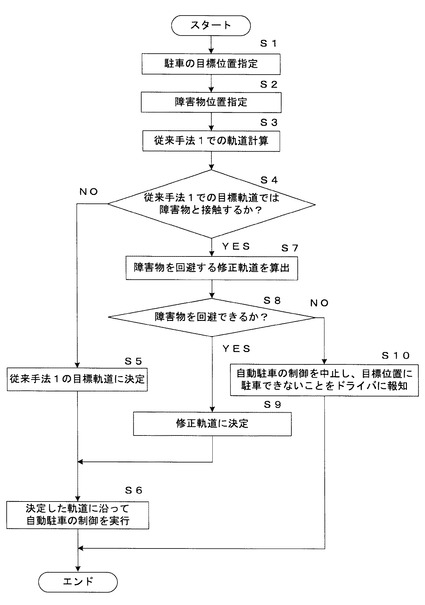
図12は本実施形態の目標軌道算出装置の上記した自動駐車の制御手順を示し、まず、軌道計算部5は、ドライバによって指定された駐車目標位置P2、障害物αの位置を取り込む(ステップS1,S2)。つぎに、従来手法1で目標軌道Tiを計算する(ステップS3)。計算した目標軌道Tiに沿って車両1が移動すれば車両1が障害物αと接触するか否かを判定する(ステップS4)。
【0053】
接触しないと予想すれば、ステップS4をNOで通過し、ステップS5に移行して自動駐車の制御軌道を目標軌道Tiに決定し、制動制御部6、操舵制御部7により、決定した目標軌道Tiに沿って自車1を移動し、目標駐車位置P2に自動駐車制御する(ステップS6)。一方、目標軌道Tiに沿って車両1が移動すると車両1が障害物αと接触すると予想される場合は、ステップS4をYESで通過してステップS7に移行し、ステップS7により提案手法1、2で修正軌道Tj、Tkを計算し、計算した修正軌道Tj、Tkに沿って車両1が移動すると、障害物αを回避できるか否かを判定する(ステップS8)。
【0054】
回避できると予想すれば、ステップ8をYESで通過し、ステップS9に移行して自動駐車の制御軌道を修正軌道Tj、Tkに決定し、ステップS6により、決定した修正軌道Tj、Tkに沿って障害物αを回避して自車1を移動し、目標駐車位置P2に自動駐車制御する。
【0055】
回避できないと予想すれば、ステップ8をNOで通過し、自動駐車の制御を中止し、警報制御部8により目標駐車位置P2に駐車不可であることをドライバに報知する(ステップS10)。
【0056】
したがって、本実施形態の場合、直線と円弧を用いた簡単な軌道計画手法で障害物αを回避した軌道を求め、障害物αを回避した自動駐車を実現することができる。
【0057】
そして、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行うことが可能であり、例えば、本発明は「右バック駐車」の自動駐車にも適用することができ、この場合は、図5の○印を付した1,2の領域に代えて7、8の領域を対象とし、提案手法1、2と同様にして修正軌道を算出すればよい。また、本発明は、車庫入れの自動駐車の制御だけでなく、例えば車両1が前進走行で旋回しながら開始位置から目標位置に移動するような自動運転制御にも適用することができる。
【0058】
つぎに、検出手段はレーダ等であってもよく、軌道計算部5等の構成はどのようであってもよい。また、目標位置P2はドライバが指定する代わりに、車外の装置から通信で提供される構成であってもよく、障害物αの位置は、同様に車外の装置から通信で提供される構成あるいは車両1に周知の障害物検出装置を搭載して自動検出する構成であってもよい。
【0059】
そして、本発明は種々の車両の目標軌道の算出に適用することができる。
【符号の説明】
【0060】
1 車両
5 軌道計算部
P1 開始位置
P2 目標位置
P3、P4 仮位置
Ti 目標軌道
Tj、Tk 修正軌道
【技術分野】
【0001】
この発明は、自動駐車等の車両の目標軌道を算出する目標軌道算出装置に関し、詳しくは、障害物を回避した目標軌道の算出に関する。
【背景技術】
【0002】
従来、とくに高齢者や初心者などに望まれる車両の制御システムとして自動駐車システムがある。この自動駐車システムにおいては、目標軌道に沿って車両を移動するため、自車の目標軌道をどのような軌道計画にしたがって求めるかが重要である。
【0003】
そして、自動駐車の車庫入れの軌道計画手法として、従来、以下に説明する2種類の「直線と円弧を用いた軌道計画手法」(以下、これらの軌道計画手法を従来手法1、2という)が提案されている(例えば、特許文献1及び非特許文献1、2参照)。
【0004】
従来手法1、2の軌道計画手法について説明すると、従来手法1、2においては、前提として、カメラ、レーダのようなセンサの検出やドライバの操作入力等により、少なくとも現在の車両位置(開始位置)からの駐車の目標位置の相対位置データが既知であることを前提とする。また、目標軌道は切返しを極力行なわないように設定される。
【0005】
(従来手法1)
そして、従来手法1について説明すると、従来手法1は車両の両側に円を描いて目標軌道Tiを求める2円軌道モデルの軌道計画手法である。
【0006】
図13(a)は車庫入れの自動駐車を行なう際の従来手法1の軌道計画の説明図であり、車両100が指定された開始位置(現在位置)P1から駐車の目標位置P2に旋回しながら後退して駐車する車庫入れ場合、従来手法1においては、作図処理において、はじめに、矢印線に示すように紙面左右方向を前後方向とする向きに開始位置P1に止まっている車両100について、車幅方向中央を通る直線L1を引き、さらに、左右の後輪を通る直線L2を引く。そして、直線L1、L2の交点で接する直線L1の2接円(半径の長さは、任意であってよいが、ここでは車両100の最小回転半径とする)C1、C2を、車両100の両側(旋回側とその反対側)に描いて作成する。
【0007】
つぎに、紙面上下方向を前後方向とする向きの目標位置P2について、上記の開始位置P1での作図手法と同様の手法で直線L1に対応する直線L11の2接円(半径の長さは、車両100の最小回転半径以上であれば任意の長さであってよいが、ここでは車両100の最小回転半径の長さとする)C11、C12を、両側(車両100の旋回側とその反対側)に描いて作成する。
【0008】
つぎに、作成した4つの接円C1、C2、C11、C12について、開始位置P1の接円C1、C2と目標位置P2の接円C11、C12とを結ぶ図13(b)の4本の接線T1〜T4を作成し、そのうちの切返しなく開始位置P1から目標位置P2に移動できる最短経路の接線T1、すなわち、開始位置P1、目標位置P2それぞれの旋回側に描いた円C1、C11に接する接線(直線)T1を車両100の車庫入れの目標軌道Tiに選択して決定する。
【0009】
図13(b)は求められた目標軌道Tiを示し、車庫入れの目標軌道Tiに選択して決定された接線T1を、残りの接線T2〜t4より太くしている。
【0010】
(従来手法2)
つぎに、従来手法2について説明すると、従来手法2は車両100の旋回側に1円を描いて目標軌道Ti*を求める1円軌道モデルの軌道計画手法である。
【0011】
図14は前記2円軌道モデルの場合と同様に車両100が開始位置(現在位置)P1から目標位置P2に旋回しながら後退して車庫入れの駐車を行なう場合の軌道計画の説明図であり、作図処理において、開始位置P1の車両100の車幅方向中央を通る紙面左右方向の直線L1を引き、目標位置P2の車幅方向中央を通る紙面上下方向の直線L11も引く。さらに、2つの直線L1、L11に接する1つの円(半径の長さは、車両100の最小回転半径以上であれば任意の長さであってよいが、ここでは車両100の最小回転半径の長さとする)C3を作成する。そして、直線L1の一部、円C3の円弧、直線L2の一部の組み合わせからなる図14の太線を車庫入れの目標軌道Ti*に決定する。
【0012】
そして、従来手法1、2によって決定された目標軌道Ti、Ti*に沿って車両100の走行、操舵を制御し、車両100を旋回しながら後退移動することで、車両100を自動的に開始位置P1から目標位置P2に移動して自動駐車を実現することが可能になる。なお、走行距離の短縮や制御のし易さ等を考慮すると、従来手法1(2円軌道モデル)によって決定する目標軌道Tiが、従来手法2(1円軌道モデル)によって決定する目標軌道Ti*より優れている。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2008−296638号公報
【非特許文献】
【0014】
【非特許文献1】辻澤 隆彦、“自動パーキングのための経路生成方法の提案”、日本機械学会論文集(C編)73巻729号(2007−5)、論文No.06−7043
【非特許文献2】ダオ ミン クアン、外2名、“自動車の自動駐車技術の実用化に関する研究”計測自動制御学会論文集、Vol.42、No7、765/774(2006)
【発明の概要】
【発明が解決しようとする課題】
【0015】
前記した従来手法1、2により目標軌道Ti、Ti*を求める目標軌道算出装置を車両100に搭載した場合、従来手法1、2で求められる目標軌道Ti、Ti*は障害物を考慮していないので、目標軌道Ti、Ti*上の障害物を回避して車庫入れの自動駐車を実現することができない。
【0016】
そして、自動駐車の場合だけでなく、目標軌道Ti、Ti*に沿って車両100を旋回しながら前進、後退して開始位置P1から目標位置P2のような種々の目標位置に自動制御する場合には、障害物を回避して目標軌道を決定することが望まれるが、従来手法1、2のような直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める構成は発明されていない。
【0017】
本発明は、直線と円弧を用いた簡単な軌道計画手法で障害物を回避した目標軌道を求める構成を提供することを目的とする。
【課題を解決するための手段】
【0018】
上記した目的を達成するために、本発明の目標軌道算出装置は、指定された開始位置から目標位置に旋回しながら移動する車両の目標軌道を、前記開始位置、前記目標位置それぞれの旋回側に描いた円の弧と該両円に接する直線とから算出する2円軌道モデルの目標軌道算出装置であって、前記車両の周囲の障害物を検出する検出手段と、前記障害物が前記目標軌道に存在する場合に、前記開始位置、前記目標位置のいずれか一方の延長線上に仮位置を設け、前記仮位置の旋回側に描いた円の円弧と、前記開始位置、前記目標位置のいずれか他方の旋回側に描いた円の円弧と、該両円に接する直線とから、前記目標軌道として前記障害物を回避する修正軌道を算出する修正軌道算出手段を備えたことを特徴としている(請求項1)。
【発明の効果】
【0019】
請求項1に記載の本発明の目標軌道算出装置によれば、従来手法1(1円軌道モデルの軌道計画手法)で目標軌道を決定すると、その軌道上に障害物が存在することになる場合に、修正軌道算出手段により、例えば目標位置の延長線上に仮位置を設け、開始位置と仮位置の円の円弧及び両円の接線の直線により、障害物を回避するように修正された修正軌道(修正された目標軌道)を算出して決定することができる。
【0020】
そして、修正軌道に沿って車両を開始位置から目標位置に旋回して移動すると、障害物を回避して車両を自動駐車できる。
【0021】
したがって、直線と円弧を用いた簡単な軌道計画手法で障害物を回避した軌道を求め、障害物を回避した自動駐車等を実現することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の目標軌道算出装置の一実施形態のブロック図である。
【図2】(a)、(b)は左バック駐車、右バック駐車の説明図である。
【図3】目標位置に駐車した状態の説明図である。
【図4】軌道上に障害物が存在する可能性がある領域の説明図である。
【図5】軌道に障害物が存在する場合の説明図である。
【図6】仮位置の説明図である。
【図7】仮位置の設定範囲の説明図である。
【図8】(a)、(b)は仮位置を用いて提案手法1で算出した修正軌道の一例、他の例の説明図である。
【図9】仮位置を用いて提案手法2で算出した修正軌道の一例の説明図である。
【図10】仮位置を用いて提案手法2で算出した修正軌道の他の例の説明図である。
【図11】仮位置を用いて提案手法2で算出した修正軌道のさらに他の例の説明図である。
【図12】図1の動作説明用のフローチャートである。
【図13】(a)、(b)は従来の軌道計算の一例の説明図である。
【図14】従来の軌道計算の他の例の説明図である。
【発明を実施するための形態】
【0023】
本発明の一実施形態について、図1〜図12を参照して説明する。
【0024】
図1に示す本実施形態の目標軌道算出装置は、車両1に搭載されて車両1の前方及び後方を撮影可能なカメラ撮影部2と、ドライバの操作を受け付ける操作入力部3と、自動駐車等の後退するシーンでは基本的にカメラ撮影部2の後方の撮影画像をタッチパネル表示器(図示せず)に画面表示してドライバのタッチ操作で指定された自車後方の駐車目標位置、障害物位置を認識する位置認識部4と、カメラ撮影部2の撮影画像及び位置認識部4の駐車目標位置認識部4a、障害物位置認識部4bの認識結果に基づき、目標軌道や修正軌道を算出する軌道計算部5と、軌道計算部5の計算結果に基づき制動制御、操舵制御、警報制御それぞれを行なう制動制御部6、操舵制御部7、警報制御部8を備える。なお、各部3〜8はマイクロコンピュータのECUで形成され、それぞれ設定されたプログラムにしたがって動作し、カメラ撮影部2、位置認識部4は、本発明の検出手段を形成し、軌道計算部5は本発明の修正軌道算出手段を形成する。
【0025】
そして、カメラ撮影部2は、夜間等の周囲環境が暗いシーンにおける後方撮影時には、例えば所定の照明を作動して自車1の後方を撮影し、夜間等の周囲環境が暗いシーンにおける前方撮影時には、ヘッドランプを照明として自車1の前記後方を撮影し、毎フイールドに最新の撮影画像を位置認識部4、軌道計算部5に送る。
【0026】
カメラ撮影部2の撮影画像を取り込んだ位置認識部4は、ダッシュボードのタッチパネル表示器の液晶画面に撮影画像を表示する。この撮影画像は、自車1が後退するシーンでは後方の撮影画像であり、自車1が前進するシーンでは前方の撮影画像である。そして、例えば自車1が後退する自動駐車の場合、後方の撮影画像の液晶画面を見たドライバが、画面に写っている後方の目標駐車位置及び障害物(信号機、壁等の静止物体及び、2輪車等の移動物体を含む)αを指定し、その指定情報が操作部3から入力されると、駐車目標位置認識部4a、障害物位置認識部4bの周知の画像処理により、目標駐車位置、障害物αを検出してカメラ撮影部2の位置に対する相対的な目標駐車位置、障害物位置を算出し、目標駐車位置、障害物位置の相対位置の情報を軌道計算部5に送る。なお、目標駐車位置、障害物位置の情報は、ドライバの再指定や自動駐車の完了があるまで、軌道計算部5に有効なものとして保持される。
【0027】
そして、軌道計算部5はつぎに説明するようにして、自動駐車の制御に必要な目標軌道Ti又は修正軌道Tj、Tkを算出し、算出結果に基づき、必要な制動、操舵の制御を制動制御部6、操舵制御部7に指令する。障害物αを回避できないときは、自動駐車の制御を行わず、その旨の警報発生を警報制御部8に指令する。
【0028】
<軌道計算部5の軌道計算処理>
軌道計算部5においては、初期の軌道計画には前記した従来手法1を採用し、それによって得られた目標軌道Ti上に障害物αがある場合に目標軌道Tiを修正して障害物αを回避する。
【0029】
ところで、車両1が開始位置P1の後ろの前進方向に向かって左側にある駐車の目標位置P2に後退走行して車庫入れを行なう駐車を「左バック駐車」、開始位置P1から進行方向に向かって右側にある駐車目標位置P2*に後退走行して車庫入れを行なう駐車を「右バック駐車」とすると、図2(a)が「左バック駐車」、同図(b)が「右バック駐車」である。図2(a)、(b)において、車両1は矢印線方向が前進方向であり、開始位置P1と目標位置P2、P2*を結ぶ太い実線が従来手法1で得られる目標軌道Ti(図(b)の接線T1に相当)である。
【0030】
本発明は、「左バック駐車」、「右バック駐車」のいずれの自動駐車にも適用できるが、いずれか一方の自動駐車の場合について説明すれば、他方の自動駐車については、旋回の向きが逆になるだけであり、同様に制御できることが容易に分かる。そこで、本実施形態においては、「左バック駐車」について説明する。
【0031】
まず、障害物αの位置によって最適な回避軌道が異なるため、軌道計算部5は、障害物の位置別に回避方法を分類して記憶し、障害物αの位置の分類に応じて修正軌道の算出等を行なう。
【0032】
すなわち、軌道計算部5は、まず、前記したように従来手法1で目標軌道Tiを計算する。具体的には、図2(a)の「左バック駐車」で車庫入れの駐車を行なう場合、はじめに、図2(a)の向きに開始位置P1に止まっている車両1について、車幅方向中央を通る直線と左右の後輪を通る直線の交点で接する2接円(半径の長さは、例えば車両1の最小回転半径)を、開始位置(車両1の現在位置)P1の旋回側とその反対側の両側に描いて作成する。つぎに、開始位置P1の後方の紙面上下方向の向きの駐車目標位置P2について、開始位置P1での作図手法と同様の手法で2接円(半径の長さは、例えば車両1の最小回転半径)を、目標位置P2の両側に描いて作成する。そして、作成した4つの接円についての図13(b)の接線T1〜T4のような4本の接線を作成し、そのうちの切返しなく開始位置P1から目標位置P2に移動できる、開始位置P1、目標位置P2それぞれの旋回側に描いた円に接する接線(直線)を目標軌道Tiに選択する。
【0033】
そして、目標軌道Tiに沿って車両1が旋回しながら後退する状態をシミュレーションして、自車1の軌道と障害物αとの当たり(重なり)の判定を行う。このとき、目標軌道Tiの軌道幅内に障害物αがなく、自車1が障害物αに全く当たらなければ、目標軌道Tiを自動駐車の軌道に決定する。
【0034】
一方、目標軌道Tiの軌道幅内に障害物αがあり、自車1が障害物αに接触して当たると判定した場合は、軌道計算部5は、障害物αが存在する領域に応じた軌道計画の修正を行う。
【0035】
障害物αの位置の分類について説明すると、本実施形態の場合、最初の軌道計算では従来手法1を用いるため、回転半径一定の円が2つ(ともに最小回転半径の円)と直線(接線)との組み合わせで目標軌道Tiが決まる。
【0036】
そして、「左バック駐車」だけでなく「右バック駐車」も考慮すると、目標位置P2に到達する際、車両1は左旋回、右旋回、直進のいずれかの後退で移動する可能性がある。図3はこれらの場合の軌道Tl、Ts、Trを模式的に示し、図4はそれらの軌道Tl、Ts、Trを軌道幅(概ね車幅に相当)を考慮した幅の斜線部で拡大して示し、障害物αが存在する可能性がある領域は軌道Tl、Ts、Trの内外の○印を付した1〜9の数字の各領域である。
【0037】
図4の○印を付した1、3、4、5、6、7の領域は軌道Tl、Ts、Tr内の領域であって、これらの領域に障害物αがあれば、車両1と障害物αが確実に接触する。図4の○印を付した9の領域の障害物αについては車両1が接触することはない。図4の○印を付した2、8の領域の障害物αについては、その位置によって車両1が接触する可能性がある。
【0038】
そして、「左バック駐車」で車庫入れの駐車を行なう本実施例の場合、右旋回することはないので、車両1は、図4の○印を付した9の領域及び7、8の領域にある障害物αと接触することはなく、1、2、3、4、5、6の領域にある障害物αとのみ接触する可能性があり、軌道計算部5は、これらの場合に自車1が障害物αに接触して当たると判定する。
【0039】
(障害物αが図4の○印を付した1の領域にある場合)
図5は障害物αが図4の○印を付した1の領域にある場合の例を示し、この例の場合、最初の従来手法1の軌道計算によって得られた目標軌道Tiの1の領域に障害物αが存在する。図5においては、円C1、C11、C12それぞれに同心状に車幅分大きな円も描き、目標軌道Tiを軌道幅(概ね車両1の車幅)を示す2本の実線で示している。
【0040】
そして、自車1が障害物αに接触して当たると判定した軌道計算部5は、図6に示すように、駐車目標位置P2の前方の延長線上に、障害物αにかからないように仮の目標位置としての本発明の仮位置P3を設定し、仮位置P3を経由する修正軌道Tjを算出して障害物αを回避する。この手法を提案手法1として、以下にさらに具体的に説明する。
【0041】
図6は提案手法1の仮位置P3に基づく修正軌道Tjを示し、仮位置P3は、そこから真直ぐ後退すれば目標位置P2に到達できる目標位置P2の前方の延長線上の位置である。同図に示すように紙面の左右方向をX方向、紙面の上下方向をY方向とすると、仮位置P3は、駐車目標位置P2からY方向に設定された一定距離ずつずらして設定され、設定される都度、車両1が現在停止している開始位置P1から仮位置P3に至る修正軌道Tjを、仮位置P3を目標位置P2として、従来手法1により、仮位置P3の旋回側に描いた円の円弧と、開始位置P1の旋回側に描いた円C1の円弧と、両円に接する直線とから算出して求め、その軌道Tj内に障害物αがあるか否か、すなわち、障害物αを回避可能か否かを判定し、回避可能であればその修正軌道Tjを目標軌道Tiに代わる軌道に決定する。
【0042】
なお、仮位置P3を設定できる範囲は限定される。そして、限定された範囲内で仮位置P3をずらしても障害物αを回避できない場合は、提案手法1では障害物αを回避できないので自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0043】
図7は仮位置P3を設定できる範囲を示す。同図に示すように開始位置P1から真直ぐに直進後退する車両1の車幅の間隔の軌道線M1、M2を求める。つぎに、真直ぐに後退して目標位置P2に到達できる、同様の間隔の軌道線M3、M4を求める。円C1を軌道線M2に沿って仮位置P3方向にずらして軌道線M2、M3と接する位置に円C1と同じ大きさの円C3を配置する。このとき生じる円C3と軌道線M3の接点Aが車両1の後輪軸上になる位置まで、換言すれば、A点がY方向に円C1の開始位置P1の接点と同じ位置になるまで、仮位置P3をY方向にずらすことができる。そして、この限界の位置から目標位置P2までの範囲が、仮位置P3の設定可能な範囲であり、仮位置P3は、Y方向に開始位置P1より駐車目標位置P2寄りに設定される。そうしないと、切返しや旋回方向の変更が必要になって制御が複雑になるからである。
【0044】
(障害物αが図5の○印を付した2の領域にある場合)
図8(a)、(b)は、障害物αが図5の○印を付した2の領域にある場合の例それぞれを示す。図8(a)の例は、障害物αの位置の駐車目標位置P2からのY方向のずれが大きくなく、提案手法1で回避できる場合であり、図8(b)の例は、障害物αの位置が駐車目標位置P2からY方向に比較的大きくずれていて提案手法1では回避できない場合である。
【0045】
そこで、障害物αが図5の○印を付した2の領域にある場合、軌道計算部5は、まず、提案手法1の軌道修正を試み、修正軌道Tjによって障害物αを回避できるか否かを判定する。その間に回避できるとする判定が発生すると、その修正軌道Tjを自動駐車の軌道に決定する(図8(a)の場合)。一方、提案手法1の軌道修正を試みて障害物αを回避できないと判定すると(図8(b)の場合)、つぎに説明する提案手法2によって修正軌道Tkを作成し、修正軌道Tkによって障害物αを回避できるか否かを判定する。
【0046】
図9は提案手法2の仮の目標位置P4に基づく修正軌道Tkを示し、提案手法2では同図に示すように、開始位置P1の前方の延長線上に仮位置P4を設定する。この場合、自車1が前進するシーンでは、カメラ撮影部2の前方の撮影画像が取り込まれれ、位置認識部4がダッシュボードのタッチパネル表示器の液晶画面に前方の撮影画像を表示する。また、仮位置P4は、開始位置P1から車両1を前進方向に一定距離ずつずらして設定され、設定される都度、仮位置P4から目標位置P2までの修正軌道Tkを、仮位置P4を開始位置P1とし、従来手法1により仮位置P4の旋回側に描いた円C4の円弧と、目標位置P2の旋回側に描いた円C11の円弧と、両円C4、C11に接する直線とから算出して求め、その軌道Tkによって障害物αを回避可能か否かを判定し、回避可能であれば、修正軌道Tkを目標軌道Tiに代わる軌道に決定する。
【0047】
なお、仮位置P4は、例えばカメラ撮影部2の前方の撮影画像をみてドライバが指定した他の障害物βに接触しない範囲で前進方向に一定距離ずつずらして開始位置P1の延長線上に設定すことができ、その範囲で障害物αを回避できない場合は、提案手法2では障害物αを回避できないので自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0048】
(障害物αが図5の○印を付した5の領域にある場合)
図10は障害物αが図5の○印を付した5の領域にある場合の例を示し、この例の場合も最初の従来手法1の軌道計算によって得られた目標軌道Ti内に障害物αが存在するので、軌道計算部5は、まず、提案手法1の軌道修正を試み、修正軌道Tjによって障害物αを回避できるか否かを判定する。回避できると判定すれば、その修正軌道Tjに決定し、する。一方、提案手法1を試みても障害物αを回避できないと判定すると、この例の場合も提案手法2によって修正軌道Tkを作成し、修正軌道Tkによって障害物αを回避できるか否かを判定する。
【0049】
図11は前記5の領域の障害物αが回避できる修正軌道Tkの例を示し、修正軌道Tkによって障害物αを回避可能であれば、その修正軌道Tkを目標軌道Tjに代わる軌道に決定する。
【0050】
(障害物αが図5の○印を付した3,4の領域にある場合)
この場合は、障害物αが目標駐車位置P2の前方近傍の開始位置P1寄りの位置に存在し、提案手法1、2の修正軌道Tj、Tkのいずれによっても障害物αを回避できない。そこで、自動駐車の制御を行なわず、その旨の警報を警報制御部6から発生する。
【0051】
そして、軌道計算部5の上記した軌道計算に基づき、修正軌道Tj、Tkによって障害物αを回避可能な場合、自動駐車の制御により、制動制御部6による制動、操舵制御部7の旋回制御により、修正軌道Tj、Tkに沿うように車両1を旋回しつつ後退移動し、切返しなく、障害物αを回避して車両1を目標位置P2に移動して駐車する。
【0052】
図12は本実施形態の目標軌道算出装置の上記した自動駐車の制御手順を示し、まず、軌道計算部5は、ドライバによって指定された駐車目標位置P2、障害物αの位置を取り込む(ステップS1,S2)。つぎに、従来手法1で目標軌道Tiを計算する(ステップS3)。計算した目標軌道Tiに沿って車両1が移動すれば車両1が障害物αと接触するか否かを判定する(ステップS4)。
【0053】
接触しないと予想すれば、ステップS4をNOで通過し、ステップS5に移行して自動駐車の制御軌道を目標軌道Tiに決定し、制動制御部6、操舵制御部7により、決定した目標軌道Tiに沿って自車1を移動し、目標駐車位置P2に自動駐車制御する(ステップS6)。一方、目標軌道Tiに沿って車両1が移動すると車両1が障害物αと接触すると予想される場合は、ステップS4をYESで通過してステップS7に移行し、ステップS7により提案手法1、2で修正軌道Tj、Tkを計算し、計算した修正軌道Tj、Tkに沿って車両1が移動すると、障害物αを回避できるか否かを判定する(ステップS8)。
【0054】
回避できると予想すれば、ステップ8をYESで通過し、ステップS9に移行して自動駐車の制御軌道を修正軌道Tj、Tkに決定し、ステップS6により、決定した修正軌道Tj、Tkに沿って障害物αを回避して自車1を移動し、目標駐車位置P2に自動駐車制御する。
【0055】
回避できないと予想すれば、ステップ8をNOで通過し、自動駐車の制御を中止し、警報制御部8により目標駐車位置P2に駐車不可であることをドライバに報知する(ステップS10)。
【0056】
したがって、本実施形態の場合、直線と円弧を用いた簡単な軌道計画手法で障害物αを回避した軌道を求め、障害物αを回避した自動駐車を実現することができる。
【0057】
そして、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行うことが可能であり、例えば、本発明は「右バック駐車」の自動駐車にも適用することができ、この場合は、図5の○印を付した1,2の領域に代えて7、8の領域を対象とし、提案手法1、2と同様にして修正軌道を算出すればよい。また、本発明は、車庫入れの自動駐車の制御だけでなく、例えば車両1が前進走行で旋回しながら開始位置から目標位置に移動するような自動運転制御にも適用することができる。
【0058】
つぎに、検出手段はレーダ等であってもよく、軌道計算部5等の構成はどのようであってもよい。また、目標位置P2はドライバが指定する代わりに、車外の装置から通信で提供される構成であってもよく、障害物αの位置は、同様に車外の装置から通信で提供される構成あるいは車両1に周知の障害物検出装置を搭載して自動検出する構成であってもよい。
【0059】
そして、本発明は種々の車両の目標軌道の算出に適用することができる。
【符号の説明】
【0060】
1 車両
5 軌道計算部
P1 開始位置
P2 目標位置
P3、P4 仮位置
Ti 目標軌道
Tj、Tk 修正軌道
【特許請求の範囲】
【請求項1】
指定された開始位置から目標位置に旋回しながら移動する車両の目標軌道を、前記開始位置、前記目標位置それぞれの旋回側に描いた円の弧と該両円に接する直線とから算出する目標軌道算出装置であって、
前記車両の周囲の障害物を検出する検出手段と、
前記障害物が前記目標軌道に存在する場合に、前記開始位置、前記目標位置のいずれか一方の延長線上に仮位置を設け、前記仮位置の旋回側に描いた円の円弧と、前記開始位置、前記目標位置のいずれか他方の旋回側に描いた円の円弧と、該両円に接する直線とから、前記目標軌道として前記障害物を回避する修正軌道を算出する修正軌道算出手段を備えたことを特徴とする目標軌道算出装置。
【請求項1】
指定された開始位置から目標位置に旋回しながら移動する車両の目標軌道を、前記開始位置、前記目標位置それぞれの旋回側に描いた円の弧と該両円に接する直線とから算出する目標軌道算出装置であって、
前記車両の周囲の障害物を検出する検出手段と、
前記障害物が前記目標軌道に存在する場合に、前記開始位置、前記目標位置のいずれか一方の延長線上に仮位置を設け、前記仮位置の旋回側に描いた円の円弧と、前記開始位置、前記目標位置のいずれか他方の旋回側に描いた円の円弧と、該両円に接する直線とから、前記目標軌道として前記障害物を回避する修正軌道を算出する修正軌道算出手段を備えたことを特徴とする目標軌道算出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−46143(P2012−46143A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−192215(P2010−192215)
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]