
目標追尾処理装置及び目標追尾処理方法
【課題】 設定された航跡モデルを有効、かつ、適切に利用できるようにして、常に高精度で信頼性の高い航跡推定が行えるようにする。
【解決手段】 目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部21と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部21による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニット25(25a〜25n)と、を備える。
【解決手段】 目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部21と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部21による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニット25(25a〜25n)と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標追尾処理装置及び目標追尾処理方法に関する。
【背景技術】
【0002】
レーダ等による飛翔体(以下、目標という)の観測データに基づき、この目標の航跡を推定することが行われている。このとき航跡の推定には、種々の航跡モデルが用いられる。航跡モデルは、航跡の特徴に基づくモデルであるため、このモデルに適した観測データが入力されなければ、高精度に航跡推定を行うことができない。
【0003】
特開2004−12351号公報においては、観測情報(観測データ)を用いて、目標の各観測時点における推定航跡の組み合わせを示す仮説群を作成すると共に、目標の観測位置及びドップラ速度に関する確からしさの評価を行って、当該評価結果に基づいて仮説群中の仮説数を削減する目標追尾装置が開示されている。この仮説数の削減により、航跡予測に用いる観測値の誤相関が減少されて、航跡予測の精度向上を図っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−12351号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特開2004−12351号公報では、事前に多数の仮説群を作成し、実際に用いる仮説を選択しそれ以外の仮説は削除する必要がある。従って、この削除されることとなった仮説群の作成のための処理負荷は無駄になるので、航跡を効率よく推定することが困難であった。
【0006】
そこで、本発明の主目的は、効率的に高精度で信頼性の高い航跡を推定する目標追尾処理装置及び目標追尾処理方法を提供することである。
【課題を解決するための手段】
【0007】
本発明は、飛翔する目標の航跡を推定する目標追尾処理装置であって、目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする。
【0008】
また、飛翔する目標の航跡を推定する目標追尾処理方法であって、目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定ステップによる判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡とする複数の予測ステップと、を含むことを特徴とする。
【発明の効果】
【0009】
本発明によれば、互いに異なるユニット航跡が設定されて、該ユニット航跡に適した観測データを相関ゲート判定部による判定結果に基づき選択して目標のユニット航跡を推定し予測し、該予測結果をユニット予測航跡として出力するので、設定されたユニット航跡を有効、かつ、適切に利用できるようになり、常に高精度で信頼性の高い航跡推定が行える。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態にかかる目標追尾処理装置のブロック図である。
【図2】第1の実施形態にかかるユニット予測航跡に対して設定された相関ゲートの図である。
【図3】第1の実施形態にかかるユニット予測航跡に対して設定された他の相関ゲートの図である。
【図4】第1の実施形態にかかるデータ選択テーブルである。
【図5】第1の実施形態にかかる選択された観測データを例示する図である。
【図6】第1の実施形態にかかる目標追尾処理方法のフローチャートである。
【図7】本発明の第1の実施形態にかかる平滑化部の動作タイミングを示した図である。
【発明を実施するための形態】
【0011】
<第1の実施形態>
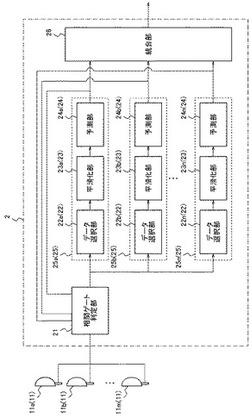
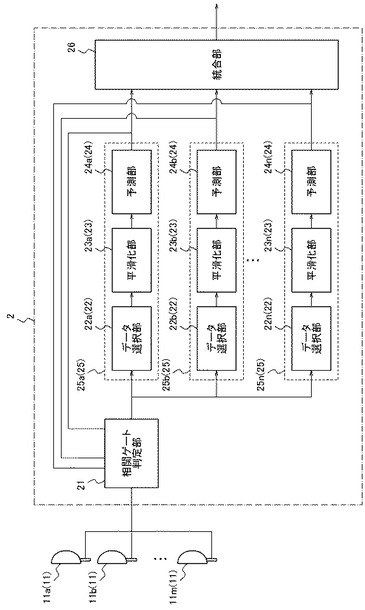
本発明の第1の実施形態を説明する。図1は、本実施形態にかかる目標追尾処理装置2のブロック図である。なお、本実施形態にかかる目標追尾処理装置2は、航空機,車両,船舶,ミサイル等の移動する飛翔体(目標)を追尾する目標追尾システムや気温、距離等を観測する観測装置に適用できる。
【0012】
目標追尾処理装置2は、相関ゲート判定部21、複数の推定ユニット25(25a〜25n)、統合部26を備える。各推定ユニット25(25a〜25n)は、それぞれデータ選択部22(22a〜22n)、平滑化部23(23a〜23n)、予測部24(24a〜24b)を備えて、予め設定された航跡モデルに従って航跡を推定及び予測する。この航跡モデルとしては、航跡の直線性、旋回性、加速性、減速性等に関して特徴を持つモデルが例示できる。無論、これら1つ又は複数のモデルを複合して用いても良い。
【0013】
なお、データ選択部22a〜22n、平滑化部23a〜23n、予測部24a〜24nは、それぞれ同じように動作する。例えば、データ選択部22aとデータ選択部22bとは同じように動作する。そこで、これらを特に区別しない場合には、データ選択部22、平滑化部23、予測部24のように総称番号を用いて説明する。なお、添え字のnは、aからnまでの意味ではなく、正の整数を意味するnであり、便宜上このような表現としている。
【0014】
また、推定ユニット25a〜25nにおける航跡推定の基本的動作は、同じである。そこで、以下においては、目標追尾処理装置2は、直進性に特徴を持つ航跡モデルにより航跡推定及び予測を行う推定ユニット25aと、旋回性に特徴を持つ航跡モデルにより航跡推定及び予測を行う推定ユニット25bとの2つの推定ユニットを備える場合を例に説明する。
【0015】
相関ゲート判定部21には、複数のレーダ11(11a〜11m)が観測した目標の観測データを入力すると共に、推定ユニット25の出力を入力する。この推定ユニット25の出力は、既に予測されたユニット航跡であり、以下ユニット予測航跡と記載する。そして、相関ゲート判定部21は、所定の相関ゲート判定処理を行い、観測データ及び判定結果(相関結果)をデータ選択部22に出力する。
【0016】
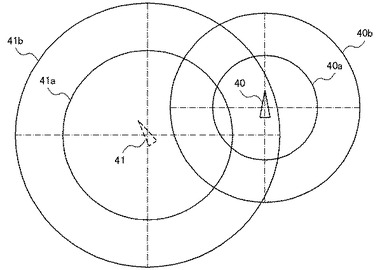
図2を参照して相関ゲート判定処理を説明する。図2は、ユニット予測航跡に対して設定された相関ゲートを示している。なお、図2に示す相関ゲートは、例示であって、種々の相関ゲートが設定できる。予測部24aにより予測されたユニット予測航跡40に対しては、ASゲート40a及びALゲート40bが設定され、予測部24bにより予測されたユニット予測航跡41に対しては、BSゲート41a及びBLゲート41bが設定されている。
【0017】
ASゲート40a及びALゲート40bは、ユニット予測航跡40を基準に設定され、BSゲート41a及びBLゲート41bは、ユニット予測航跡41を基準に設定されている。そして、ASゲート40a又はALゲート40bの範囲内の観測データは、ユニット予測航跡40と相関する。同様に、BSゲート41a又はBLゲート41bの範囲内の観測データは、ユニット予測航跡41と相関する。なお、図2及び後述する図3においては、ASゲート40a及びALゲート40bはユニット予測航跡40を中心に設定され、BSゲート41a及びBLゲート41bはユニット予測航跡41を中心に設定されている例を示すが、本発明は、これに限定するものではなく、各ゲートの中心がユニット予測航跡とずれていてもよい。
【0018】
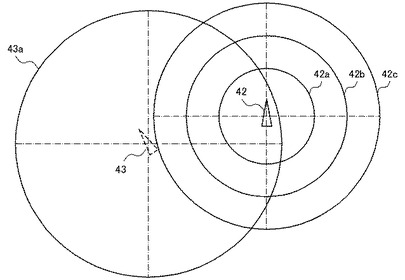
図3は、ユニット予測航跡42に対してASゲート42a、AMゲート42b、ALゲート42cの3つの相関ゲートが設定され、ユニット予測航跡43に対してBLゲート43aの1つの相関ゲートが設定されている例である。
【0019】
各相関ゲートの大きさは、ユニット予測航跡の予測特性(航跡モデル)により異なる。先に、予測ユニット25aの航跡モデルは直線性に特徴を持ち、予測ユニット25bの航跡モデルは旋回性に特徴を持つとした。従って、推定ユニット25aから出力されるユニット予測航跡40,42は、直線性に関する推定及び予測が主となる。これに対して推定ユニット25bから出力されるユニット予測航跡41,43は、旋回性に関する推定及び予測が主となる。
【0020】
依って、ASゲート40a及びALゲート40bの大きさは、直線性に関する航跡の推定に適するように、狭い範囲で観測データの相関を判断すれば良いので、相関ゲートは小さく設定されている。一方、BSゲート41a及びBLゲート41bの大きさは、旋回性に関する航跡の推定に適するように、広い範囲で観測データの相関が求められるように、相関ゲートは大きく設定されている。
【0021】
但し、後述するように、ユニット予測航跡40を基準に設定された相関ゲートは予測ユニット25aにのみ利用され、ユニット予測航跡41を基準に設定された相関ゲートは予測ユニット25bにのみ利用されるものではなく、データ選択部に設定されているデータ選択テーブルに基づき利用される。
【0022】
データ選択部22は、相関ゲート判定部21から、観測データとその相関結果とを受信して、予め設定されたデータ選択テーブルに基づき受信した観測データを出力する。このとき、データ選択部22aは、データ選択テーブルに基づき直線性を特徴とする航跡モデルに適した観測データを選択し、データ選択部22bは、データ選択テーブルに基づき旋回性を特徴とする航跡モデルに適した観測データを選択する。なお、観測データの出力は、後述する平滑化部23が平滑化処理を行うタイミングに同期して行われる。
【0023】
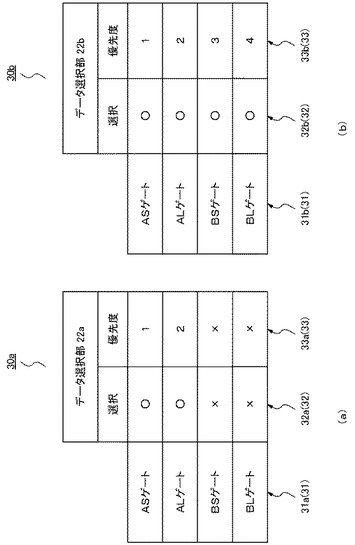
図4(a)はデータ選択部22aに適用されるデータ選択テーブル30aを例示し、図4(b)はデータ選択部22bに適用されるデータ選択テーブル30bを例示している。
【0024】
図4(a)、(b)に示すデータ選択テーブル30a,30bは、相関ゲート項目31(31a,31b)、選択判断項目32(32a,32b)及び優先度項目33(33a,33b)を含んでいる。選択判断項目32における、○印は相関ゲート項目31で指定された相関ゲートが判定した観測データを選択する候補(選択候補)であることを示し、×印は選択候補でないことを示している。また、優先度項目33は、選択候補の観測データを選択する際の優先順位を示している。
【0025】
従って、図4(a)の選択判断項目32aは、データ選択部22aにおいてASゲート40a及びALゲート40bに相関づけられた観測データが選択候補であることを示し、BSゲート41及びBLゲート41bに相関づけられた観測データは選択候補としないことを示す。また、優先度項目33aは、ASゲート40aに相関づけられた観測データはALゲート40bにより相関づけられた観測データより優先度が高いので、それぞれの相関ゲートにより相関づけられた2つの観測データが存在する場合は、ASゲート40aにより相関づけられた観測データが選択されることを示す。
【0026】
一方、図4(b)の選択判断項目32bは、データ選択部22bにおいてASゲート40a、ALゲート40b、BSゲート41a及びBLゲート41bに相関づけられた全ての観測データが選択候補であることを示している。また、優先度項目33bは、ASゲート40a、ALゲート40b、BSゲート41a及びBLゲート41bに相関づけられた観測データは、この優先度で選択されることを示している。
【0027】
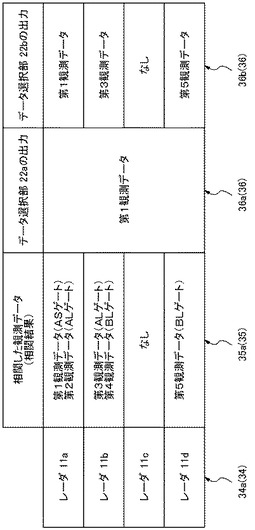
図5は、観測機器項目34、相関結果項目35、図4(a)、(b)のデータ選択テーブル30a,30bに従い選択された観測データを例示する選択結果項目36を示す図である。本実施形態においては、目標を観測するための観測機器は、レーダを用いている。従って、観測機器項目34は、レーダ11(11a〜11d)を示している。相関結果項目35は、観測機器項目34で特定されたレーダからの観測データに対する相関ゲートの相関判定結果を示している。
【0028】
図5においては、レーダ11aからの観測データは、ASゲートにより相関があるデータ(これを第1観測データとする)と判定され、ALゲートにより相関があるデータ(これを第2観測データとする)と判定されている。レーダ11bからの観測データは、ALゲートにより相関があるデータ(これを第3観測データとする)と判定され、BLゲートにより相関があるデータ(これを第4観測データとする)と判定されている。レーダ11cからの観測データは、どの相関ゲートによっても相関が認められない。レーダ11dからの観測データは、BLゲートにより相関があるデータ(これを第5観測データとする)と判定されている。
【0029】
選択結果項目36は、各データ選択部22a,22bが選択したデータを示している。図4(a)のデータ選択テーブル30aによれば、データ選択部22aは、ASゲート及びALゲートにより相関判定された観測データを選択候補とする。従って、第1観測データ(ASゲート)、第2観測データ(ALゲート)、第3観測データ(ALゲート)が候補となる。
【0030】
図4(a)の優先度項目33aによれば、ASゲートにより相関が認められた観測データ(第1観測データ)の方が、ALゲートにより相関が認められた観測データ(第2観測データ及び第3観測データ)より優先度が高い。そして、データ選択部22aに対する優先度項目33aは、全ての観測機器(レーダ)からの観測データに対して優先順位を適用する。従って、データ選択部22aは、最も優先度の高いASゲートにより相関が認められた第1観測データを選択する。
【0031】
一方、図4(b)のデータ選択テーブル30bによれば、データ選択部22bは、全ての相関ゲートにより相関判定された観測データを選択候補とする。従って、第1観測データ(ASゲート)、第2観測データ(ALゲート)、第3観測データ(ALゲート)、第4観測データ(BLゲート)、第5観測データ(BLゲート)が候補となる。
【0032】
図4(b)の優先度項目33bによれば、ASゲートにより相関が認められた観測データ(第1観測データ)、ALゲートにより相関が認められた観測データ(第2観測データ及び第3観測データ)、BLゲートにより相関が認められた観測データ(第4観測データ及び第5観測データ)の順番で優先度が高い。そして、データ選択部22bに対する優先度項目33bは、観測機器項目34a毎に適用される。従って、レーダ11aの観測データに対しては、第1観測データ(ASゲート)が選択され、レーダ11bの観測データに対しては、第3観測データ(ALゲート)が選択され、レーダ11dの観測データに対しては、第5観測データ(BLゲート)が選択される。
【0033】
平滑化部23は、所定のタイミングでデータ選択部22から選択した観測データを受信し、例えばα−βフィルタやカルマンフィルタ等の平滑化フィルタを用いて位置や速度の平滑化処理(推定)を行う。なお、各平滑化部23a〜23nは、同じ周期で動作する。α−βフィルタを用いた位置の平滑化処理は、例えば観測時刻をt、目標の予測位置をPp(t)、目標の観測位置をPo(t)、フィルタ係数をα、平均化された位置をPa(t)として、Pa(t)=Pp(t)+α(Po(t)−Pp(t))に従って求めることができる。
【0034】
予測部24は、平滑化部23で求めた平滑化された位置や速度に基づき、観測時刻から予め設定された時間幅経過(例えば、平滑化部23が平滑化処理する時間間隔)後の時刻における目標の予測位置を算出する。この算出結果がユニット予測航跡で、相関ゲート判定部21及び統合部26に出力される。
【0035】
統合部26は、各予測部24a〜24nからユニット予測航跡を受信し、これらを統合することにより目標の航跡として出力する。
【0036】
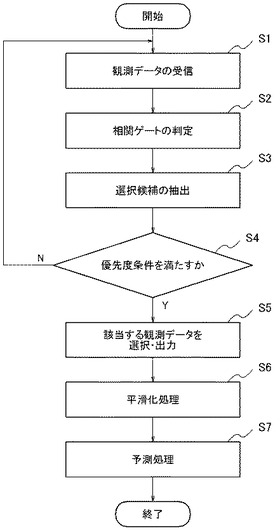
次に、上述した目標追尾処理装置における目標追尾処理方法を図6に示すフローチャートに従い説明する。先ず、相関ゲート判定部21は、レーダからの観測データを受信する(ステップS1)。そして、相関ゲート判定部21は、受信した観測データに関して相関を判定する(ステップS2)。相関の判定は、ユニット予測航跡を基準として予め設定された範囲又は計算により求められた範囲の複数の相関ゲートを設定し、観測データがどの相関ゲートに含まれるかにより行う。観測データの相関が判定されると、相関ゲート判定部21は観測データと判定した相関結果を各推定ユニット25に出力する。
【0037】
各推定ユニット25におけるデータ選択部22は、予め設定された航跡モデルに対応したデータ選択テーブルを備えている。そこで、データ選択部22は、相関ゲート判定部21からの相関判定結果に基づきデータ選択テーブルに該当する観測データを抽出して選択候補とする(ステップS3)。
【0038】
そして、データ選択テーブルで指示された優先度を満たす選択候補が存在するか否かを判断する(ステップS4)。優先度条件を満たす選択候補が存在しない場合には、ステップS1に戻るが、存在する場合にはステップS5に進む。
【0039】
データ選択部22は、平滑化部23が平滑化処理を行うタイミングに合わせて、優先度条件に該当する選択候補の観測データを出力する(ステップS5)。
【0040】
平滑化部23はデータ選択部22から観測データを受信して、平滑化処理を行い(ステップS6)、予測部24が平滑化処理されたデータに基づき予測処理を行う(ステップS7)。この予測処理によりユニット予測航跡が生成されて、統合部26で統合されて、目標の予測航跡として出力される。
【0041】
以上説明したように、航跡予測を行う際に、相関付けされた複数の観測データの中から、航跡モデルに適した観測データを選択して行うので、予測精度が向上する。また、観測データを選択する際に、航跡推定及び予測の特性に応じて観測データの選択優先度を設けたので、効率良く予測精度が向上する。そして、航跡推定及び予測の特性に応じた観測データの選択を行うため、未探知やクラッタの発生に対しても良好な追尾結果が得られる。
<第2の実施形態>
次に、本発明の第2の実施形態を説明する。なお、第1の実施形態と同一構成に関しては同一符号を用いて説明を適宜省略する。第1の実施形態では、各平滑化部23は同じ周期で動作した。これに対して、本実施形態では、各平滑化部23は、設定された航跡モデルに応じた周期で動作する。
【0042】
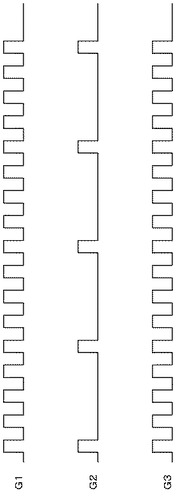
図7は、このような目標追尾処理装置における平滑化部23の動作タイミングを示した図である。直線性を特徴とする航跡モデルが設定された推定ユニット25aの平滑化部23aは、タイミング信号G1を基本周期信号として、この基本周期信号の4周期を1周期とする平滑化タイミング信号G2に従い平滑化処理を行う。また、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化部23bは、タイミング信号G1と同じ周期の平滑化タイミング信号G3に従い平滑化処理を行う場合を示している。従って、平滑化部23bにおける平滑化処理の回数は、平滑化部23aにおける平滑化処理の回数の4倍となっている。なおタイミング信号と平滑化信号との周期の関係は、航跡モデルに応じて複数設定される。また、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化周期を、直線性を特徴とする航跡モデルが設定された推定ユニット25aの平滑化周期と等しくしておき、目標の旋回を検出した場合のみ、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化周期を短くすることもできる。
【0043】
目標の直線運動と螺旋運動とを比べた場合、螺旋運動は加速度が大きい。この加速度の相違は、先に説明した相関ゲートの大きさの違いに対応している。このことは、大きなエリアの相関ゲートで相関付けられる目標の位置を正確に検出するためには、予測時間間隔を短くする必要がある。そこで、平滑化位置等を算出する時間間隔を短くして、推定精度を向上させる。
【0044】
このような理由から、螺旋性に特徴を持つ航跡モデルが設定されている平滑化部23bにおける平滑化処理回数を、直線性に特徴を持つ航跡モデルが設定されている平滑化部23aにおける平滑化処理回数より多くしている。これにより、螺旋性に関する推定精度は、直線性に関する推定精度と同程度にすることができる。
【0045】
以上説明した特徴を、以下に纏める。
【0046】
<付記1>
飛翔する目標を追尾するために、この目標の航跡を推定する目標追尾処理装置であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定部による判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする目標追尾処理装置。
【0047】
<付記2>
付記1に記載の目標追尾処理装置であって、
複数の前記ユニット予測航跡を統合して、前記目標に対する航跡として出力する統合部を備えることを特徴とする目標追尾処理装置。
【0048】
<付記3>
付記1又は2に記載の目標追尾処理装置であって、
前記相関ゲート判定部は、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを備えることを特徴とする目標追尾処理装置。
【0049】
<付記4>
付記1乃至3のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットは、当該推定ユニットに設定された前記航跡モデルに適した前記観測データを選択するデータ選択部を備えることを特徴とする目標追尾処理装置。
【0050】
<付記5>
付記1乃至4のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択することができることを特徴とする目標追尾処理装置。
【0051】
<付記6>
付記5に記載の目標追尾処理装置であって、
前記データ選択テーブルには、全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位が、当該推定ユニットに設定された前記航跡モデルに応じて設定されていることを特徴とする目標追尾処理装置。
【0052】
<付記7>
付記1乃至6のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットに設定されている航跡モデルに応じて、前記推定ユニット毎の航跡推定を行う周期が設定されていることを特徴とする目標追尾処理装置。
【0053】
<付記8>
飛翔する目標を追尾するために、この目標の航跡を推定する目標追尾処理方法であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定ステップによる判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡とする複数の推定ステップと、を含むことを特徴とする目標追尾処理方法。
【0054】
<付記9>
付記8に記載の目標追尾処理方法であって、
複数の前記ユニット予測航跡を統合して、前記目標に対する航跡として出力する統合ステップを含むことを特徴とする目標追尾処理方法。
【0055】
<付記10>
付記8又は9に記載の目標追尾処理方法であって、
前記相関ゲート判定ステップは、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを生成するステップを含むことを特徴とする目標追尾処理方法。
【0056】
<付記11>
付記8乃至10のいずれか1項に記載の目標追尾処理方法であって、
前記推定ステップは、当該推定ステップに設定された前記航跡モデルに適した前記観測データを選択するデータ選択ステップを含むことを特徴とする目標追尾処理方法。
【0057】
<付記12>
付記8乃至11のいずれか1項に記載の目標追尾処理方法であって、
前記データ選択ステップは、前記観測データを選択する際に、推定ユニット毎に設定された前記航跡モデルに適する前記観測データを当該推定ユニットに設定されたデータ選択テーブルに基づき選択するステップを含むことを特徴とする目標追尾処理方法。
【0058】
<付記13>
付記12に記載の目標追尾処理方法であって、
全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位に基づき、前記観測データを選択するステップを含むことを特徴とする目標追尾処理方法。
【0059】
<付記14>
付記8乃至13のいずれか1項に記載の目標追尾処理方法であって、
前記予測ステップは、前記航跡モデルに対応して予め設定された航跡推定の周期に従い航跡推定を行うことを特徴とする目標追尾処理方法。
【符号の説明】
【0060】
2 目標追尾処理装置
11a〜11d レーダ
21 相関ゲート判定部
22(22a〜22n) データ選択部
23(23a〜23n) 平滑化部
24(24a〜24n) 予測部
25(25a〜25n) 推定ユニット
26 統合部
30a,30b データ選択テーブル
31 相関ゲート項目
32 選択判断項目
33 優先度項目
34 観測機器項目
35 相関結果項目
36 選択結果項目
【技術分野】
【0001】
本発明は、目標追尾処理装置及び目標追尾処理方法に関する。
【背景技術】
【0002】
レーダ等による飛翔体(以下、目標という)の観測データに基づき、この目標の航跡を推定することが行われている。このとき航跡の推定には、種々の航跡モデルが用いられる。航跡モデルは、航跡の特徴に基づくモデルであるため、このモデルに適した観測データが入力されなければ、高精度に航跡推定を行うことができない。
【0003】
特開2004−12351号公報においては、観測情報(観測データ)を用いて、目標の各観測時点における推定航跡の組み合わせを示す仮説群を作成すると共に、目標の観測位置及びドップラ速度に関する確からしさの評価を行って、当該評価結果に基づいて仮説群中の仮説数を削減する目標追尾装置が開示されている。この仮説数の削減により、航跡予測に用いる観測値の誤相関が減少されて、航跡予測の精度向上を図っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−12351号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特開2004−12351号公報では、事前に多数の仮説群を作成し、実際に用いる仮説を選択しそれ以外の仮説は削除する必要がある。従って、この削除されることとなった仮説群の作成のための処理負荷は無駄になるので、航跡を効率よく推定することが困難であった。
【0006】
そこで、本発明の主目的は、効率的に高精度で信頼性の高い航跡を推定する目標追尾処理装置及び目標追尾処理方法を提供することである。
【課題を解決するための手段】
【0007】
本発明は、飛翔する目標の航跡を推定する目標追尾処理装置であって、目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする。
【0008】
また、飛翔する目標の航跡を推定する目標追尾処理方法であって、目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定ステップによる判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡とする複数の予測ステップと、を含むことを特徴とする。
【発明の効果】
【0009】
本発明によれば、互いに異なるユニット航跡が設定されて、該ユニット航跡に適した観測データを相関ゲート判定部による判定結果に基づき選択して目標のユニット航跡を推定し予測し、該予測結果をユニット予測航跡として出力するので、設定されたユニット航跡を有効、かつ、適切に利用できるようになり、常に高精度で信頼性の高い航跡推定が行える。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態にかかる目標追尾処理装置のブロック図である。
【図2】第1の実施形態にかかるユニット予測航跡に対して設定された相関ゲートの図である。
【図3】第1の実施形態にかかるユニット予測航跡に対して設定された他の相関ゲートの図である。
【図4】第1の実施形態にかかるデータ選択テーブルである。
【図5】第1の実施形態にかかる選択された観測データを例示する図である。
【図6】第1の実施形態にかかる目標追尾処理方法のフローチャートである。
【図7】本発明の第1の実施形態にかかる平滑化部の動作タイミングを示した図である。
【発明を実施するための形態】
【0011】
<第1の実施形態>
本発明の第1の実施形態を説明する。図1は、本実施形態にかかる目標追尾処理装置2のブロック図である。なお、本実施形態にかかる目標追尾処理装置2は、航空機,車両,船舶,ミサイル等の移動する飛翔体(目標)を追尾する目標追尾システムや気温、距離等を観測する観測装置に適用できる。
【0012】
目標追尾処理装置2は、相関ゲート判定部21、複数の推定ユニット25(25a〜25n)、統合部26を備える。各推定ユニット25(25a〜25n)は、それぞれデータ選択部22(22a〜22n)、平滑化部23(23a〜23n)、予測部24(24a〜24b)を備えて、予め設定された航跡モデルに従って航跡を推定及び予測する。この航跡モデルとしては、航跡の直線性、旋回性、加速性、減速性等に関して特徴を持つモデルが例示できる。無論、これら1つ又は複数のモデルを複合して用いても良い。
【0013】
なお、データ選択部22a〜22n、平滑化部23a〜23n、予測部24a〜24nは、それぞれ同じように動作する。例えば、データ選択部22aとデータ選択部22bとは同じように動作する。そこで、これらを特に区別しない場合には、データ選択部22、平滑化部23、予測部24のように総称番号を用いて説明する。なお、添え字のnは、aからnまでの意味ではなく、正の整数を意味するnであり、便宜上このような表現としている。
【0014】
また、推定ユニット25a〜25nにおける航跡推定の基本的動作は、同じである。そこで、以下においては、目標追尾処理装置2は、直進性に特徴を持つ航跡モデルにより航跡推定及び予測を行う推定ユニット25aと、旋回性に特徴を持つ航跡モデルにより航跡推定及び予測を行う推定ユニット25bとの2つの推定ユニットを備える場合を例に説明する。
【0015】
相関ゲート判定部21には、複数のレーダ11(11a〜11m)が観測した目標の観測データを入力すると共に、推定ユニット25の出力を入力する。この推定ユニット25の出力は、既に予測されたユニット航跡であり、以下ユニット予測航跡と記載する。そして、相関ゲート判定部21は、所定の相関ゲート判定処理を行い、観測データ及び判定結果(相関結果)をデータ選択部22に出力する。
【0016】
図2を参照して相関ゲート判定処理を説明する。図2は、ユニット予測航跡に対して設定された相関ゲートを示している。なお、図2に示す相関ゲートは、例示であって、種々の相関ゲートが設定できる。予測部24aにより予測されたユニット予測航跡40に対しては、ASゲート40a及びALゲート40bが設定され、予測部24bにより予測されたユニット予測航跡41に対しては、BSゲート41a及びBLゲート41bが設定されている。
【0017】
ASゲート40a及びALゲート40bは、ユニット予測航跡40を基準に設定され、BSゲート41a及びBLゲート41bは、ユニット予測航跡41を基準に設定されている。そして、ASゲート40a又はALゲート40bの範囲内の観測データは、ユニット予測航跡40と相関する。同様に、BSゲート41a又はBLゲート41bの範囲内の観測データは、ユニット予測航跡41と相関する。なお、図2及び後述する図3においては、ASゲート40a及びALゲート40bはユニット予測航跡40を中心に設定され、BSゲート41a及びBLゲート41bはユニット予測航跡41を中心に設定されている例を示すが、本発明は、これに限定するものではなく、各ゲートの中心がユニット予測航跡とずれていてもよい。
【0018】
図3は、ユニット予測航跡42に対してASゲート42a、AMゲート42b、ALゲート42cの3つの相関ゲートが設定され、ユニット予測航跡43に対してBLゲート43aの1つの相関ゲートが設定されている例である。
【0019】
各相関ゲートの大きさは、ユニット予測航跡の予測特性(航跡モデル)により異なる。先に、予測ユニット25aの航跡モデルは直線性に特徴を持ち、予測ユニット25bの航跡モデルは旋回性に特徴を持つとした。従って、推定ユニット25aから出力されるユニット予測航跡40,42は、直線性に関する推定及び予測が主となる。これに対して推定ユニット25bから出力されるユニット予測航跡41,43は、旋回性に関する推定及び予測が主となる。
【0020】
依って、ASゲート40a及びALゲート40bの大きさは、直線性に関する航跡の推定に適するように、狭い範囲で観測データの相関を判断すれば良いので、相関ゲートは小さく設定されている。一方、BSゲート41a及びBLゲート41bの大きさは、旋回性に関する航跡の推定に適するように、広い範囲で観測データの相関が求められるように、相関ゲートは大きく設定されている。
【0021】
但し、後述するように、ユニット予測航跡40を基準に設定された相関ゲートは予測ユニット25aにのみ利用され、ユニット予測航跡41を基準に設定された相関ゲートは予測ユニット25bにのみ利用されるものではなく、データ選択部に設定されているデータ選択テーブルに基づき利用される。
【0022】
データ選択部22は、相関ゲート判定部21から、観測データとその相関結果とを受信して、予め設定されたデータ選択テーブルに基づき受信した観測データを出力する。このとき、データ選択部22aは、データ選択テーブルに基づき直線性を特徴とする航跡モデルに適した観測データを選択し、データ選択部22bは、データ選択テーブルに基づき旋回性を特徴とする航跡モデルに適した観測データを選択する。なお、観測データの出力は、後述する平滑化部23が平滑化処理を行うタイミングに同期して行われる。
【0023】
図4(a)はデータ選択部22aに適用されるデータ選択テーブル30aを例示し、図4(b)はデータ選択部22bに適用されるデータ選択テーブル30bを例示している。
【0024】
図4(a)、(b)に示すデータ選択テーブル30a,30bは、相関ゲート項目31(31a,31b)、選択判断項目32(32a,32b)及び優先度項目33(33a,33b)を含んでいる。選択判断項目32における、○印は相関ゲート項目31で指定された相関ゲートが判定した観測データを選択する候補(選択候補)であることを示し、×印は選択候補でないことを示している。また、優先度項目33は、選択候補の観測データを選択する際の優先順位を示している。
【0025】
従って、図4(a)の選択判断項目32aは、データ選択部22aにおいてASゲート40a及びALゲート40bに相関づけられた観測データが選択候補であることを示し、BSゲート41及びBLゲート41bに相関づけられた観測データは選択候補としないことを示す。また、優先度項目33aは、ASゲート40aに相関づけられた観測データはALゲート40bにより相関づけられた観測データより優先度が高いので、それぞれの相関ゲートにより相関づけられた2つの観測データが存在する場合は、ASゲート40aにより相関づけられた観測データが選択されることを示す。
【0026】
一方、図4(b)の選択判断項目32bは、データ選択部22bにおいてASゲート40a、ALゲート40b、BSゲート41a及びBLゲート41bに相関づけられた全ての観測データが選択候補であることを示している。また、優先度項目33bは、ASゲート40a、ALゲート40b、BSゲート41a及びBLゲート41bに相関づけられた観測データは、この優先度で選択されることを示している。
【0027】
図5は、観測機器項目34、相関結果項目35、図4(a)、(b)のデータ選択テーブル30a,30bに従い選択された観測データを例示する選択結果項目36を示す図である。本実施形態においては、目標を観測するための観測機器は、レーダを用いている。従って、観測機器項目34は、レーダ11(11a〜11d)を示している。相関結果項目35は、観測機器項目34で特定されたレーダからの観測データに対する相関ゲートの相関判定結果を示している。
【0028】
図5においては、レーダ11aからの観測データは、ASゲートにより相関があるデータ(これを第1観測データとする)と判定され、ALゲートにより相関があるデータ(これを第2観測データとする)と判定されている。レーダ11bからの観測データは、ALゲートにより相関があるデータ(これを第3観測データとする)と判定され、BLゲートにより相関があるデータ(これを第4観測データとする)と判定されている。レーダ11cからの観測データは、どの相関ゲートによっても相関が認められない。レーダ11dからの観測データは、BLゲートにより相関があるデータ(これを第5観測データとする)と判定されている。
【0029】
選択結果項目36は、各データ選択部22a,22bが選択したデータを示している。図4(a)のデータ選択テーブル30aによれば、データ選択部22aは、ASゲート及びALゲートにより相関判定された観測データを選択候補とする。従って、第1観測データ(ASゲート)、第2観測データ(ALゲート)、第3観測データ(ALゲート)が候補となる。
【0030】
図4(a)の優先度項目33aによれば、ASゲートにより相関が認められた観測データ(第1観測データ)の方が、ALゲートにより相関が認められた観測データ(第2観測データ及び第3観測データ)より優先度が高い。そして、データ選択部22aに対する優先度項目33aは、全ての観測機器(レーダ)からの観測データに対して優先順位を適用する。従って、データ選択部22aは、最も優先度の高いASゲートにより相関が認められた第1観測データを選択する。
【0031】
一方、図4(b)のデータ選択テーブル30bによれば、データ選択部22bは、全ての相関ゲートにより相関判定された観測データを選択候補とする。従って、第1観測データ(ASゲート)、第2観測データ(ALゲート)、第3観測データ(ALゲート)、第4観測データ(BLゲート)、第5観測データ(BLゲート)が候補となる。
【0032】
図4(b)の優先度項目33bによれば、ASゲートにより相関が認められた観測データ(第1観測データ)、ALゲートにより相関が認められた観測データ(第2観測データ及び第3観測データ)、BLゲートにより相関が認められた観測データ(第4観測データ及び第5観測データ)の順番で優先度が高い。そして、データ選択部22bに対する優先度項目33bは、観測機器項目34a毎に適用される。従って、レーダ11aの観測データに対しては、第1観測データ(ASゲート)が選択され、レーダ11bの観測データに対しては、第3観測データ(ALゲート)が選択され、レーダ11dの観測データに対しては、第5観測データ(BLゲート)が選択される。
【0033】
平滑化部23は、所定のタイミングでデータ選択部22から選択した観測データを受信し、例えばα−βフィルタやカルマンフィルタ等の平滑化フィルタを用いて位置や速度の平滑化処理(推定)を行う。なお、各平滑化部23a〜23nは、同じ周期で動作する。α−βフィルタを用いた位置の平滑化処理は、例えば観測時刻をt、目標の予測位置をPp(t)、目標の観測位置をPo(t)、フィルタ係数をα、平均化された位置をPa(t)として、Pa(t)=Pp(t)+α(Po(t)−Pp(t))に従って求めることができる。
【0034】
予測部24は、平滑化部23で求めた平滑化された位置や速度に基づき、観測時刻から予め設定された時間幅経過(例えば、平滑化部23が平滑化処理する時間間隔)後の時刻における目標の予測位置を算出する。この算出結果がユニット予測航跡で、相関ゲート判定部21及び統合部26に出力される。
【0035】
統合部26は、各予測部24a〜24nからユニット予測航跡を受信し、これらを統合することにより目標の航跡として出力する。
【0036】
次に、上述した目標追尾処理装置における目標追尾処理方法を図6に示すフローチャートに従い説明する。先ず、相関ゲート判定部21は、レーダからの観測データを受信する(ステップS1)。そして、相関ゲート判定部21は、受信した観測データに関して相関を判定する(ステップS2)。相関の判定は、ユニット予測航跡を基準として予め設定された範囲又は計算により求められた範囲の複数の相関ゲートを設定し、観測データがどの相関ゲートに含まれるかにより行う。観測データの相関が判定されると、相関ゲート判定部21は観測データと判定した相関結果を各推定ユニット25に出力する。
【0037】
各推定ユニット25におけるデータ選択部22は、予め設定された航跡モデルに対応したデータ選択テーブルを備えている。そこで、データ選択部22は、相関ゲート判定部21からの相関判定結果に基づきデータ選択テーブルに該当する観測データを抽出して選択候補とする(ステップS3)。
【0038】
そして、データ選択テーブルで指示された優先度を満たす選択候補が存在するか否かを判断する(ステップS4)。優先度条件を満たす選択候補が存在しない場合には、ステップS1に戻るが、存在する場合にはステップS5に進む。
【0039】
データ選択部22は、平滑化部23が平滑化処理を行うタイミングに合わせて、優先度条件に該当する選択候補の観測データを出力する(ステップS5)。
【0040】
平滑化部23はデータ選択部22から観測データを受信して、平滑化処理を行い(ステップS6)、予測部24が平滑化処理されたデータに基づき予測処理を行う(ステップS7)。この予測処理によりユニット予測航跡が生成されて、統合部26で統合されて、目標の予測航跡として出力される。
【0041】
以上説明したように、航跡予測を行う際に、相関付けされた複数の観測データの中から、航跡モデルに適した観測データを選択して行うので、予測精度が向上する。また、観測データを選択する際に、航跡推定及び予測の特性に応じて観測データの選択優先度を設けたので、効率良く予測精度が向上する。そして、航跡推定及び予測の特性に応じた観測データの選択を行うため、未探知やクラッタの発生に対しても良好な追尾結果が得られる。
<第2の実施形態>
次に、本発明の第2の実施形態を説明する。なお、第1の実施形態と同一構成に関しては同一符号を用いて説明を適宜省略する。第1の実施形態では、各平滑化部23は同じ周期で動作した。これに対して、本実施形態では、各平滑化部23は、設定された航跡モデルに応じた周期で動作する。
【0042】
図7は、このような目標追尾処理装置における平滑化部23の動作タイミングを示した図である。直線性を特徴とする航跡モデルが設定された推定ユニット25aの平滑化部23aは、タイミング信号G1を基本周期信号として、この基本周期信号の4周期を1周期とする平滑化タイミング信号G2に従い平滑化処理を行う。また、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化部23bは、タイミング信号G1と同じ周期の平滑化タイミング信号G3に従い平滑化処理を行う場合を示している。従って、平滑化部23bにおける平滑化処理の回数は、平滑化部23aにおける平滑化処理の回数の4倍となっている。なおタイミング信号と平滑化信号との周期の関係は、航跡モデルに応じて複数設定される。また、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化周期を、直線性を特徴とする航跡モデルが設定された推定ユニット25aの平滑化周期と等しくしておき、目標の旋回を検出した場合のみ、旋回性を特徴とする航跡モデルが設定された推定ユニット25bの平滑化周期を短くすることもできる。
【0043】
目標の直線運動と螺旋運動とを比べた場合、螺旋運動は加速度が大きい。この加速度の相違は、先に説明した相関ゲートの大きさの違いに対応している。このことは、大きなエリアの相関ゲートで相関付けられる目標の位置を正確に検出するためには、予測時間間隔を短くする必要がある。そこで、平滑化位置等を算出する時間間隔を短くして、推定精度を向上させる。
【0044】
このような理由から、螺旋性に特徴を持つ航跡モデルが設定されている平滑化部23bにおける平滑化処理回数を、直線性に特徴を持つ航跡モデルが設定されている平滑化部23aにおける平滑化処理回数より多くしている。これにより、螺旋性に関する推定精度は、直線性に関する推定精度と同程度にすることができる。
【0045】
以上説明した特徴を、以下に纏める。
【0046】
<付記1>
飛翔する目標を追尾するために、この目標の航跡を推定する目標追尾処理装置であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定部による判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする目標追尾処理装置。
【0047】
<付記2>
付記1に記載の目標追尾処理装置であって、
複数の前記ユニット予測航跡を統合して、前記目標に対する航跡として出力する統合部を備えることを特徴とする目標追尾処理装置。
【0048】
<付記3>
付記1又は2に記載の目標追尾処理装置であって、
前記相関ゲート判定部は、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを備えることを特徴とする目標追尾処理装置。
【0049】
<付記4>
付記1乃至3のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットは、当該推定ユニットに設定された前記航跡モデルに適した前記観測データを選択するデータ選択部を備えることを特徴とする目標追尾処理装置。
【0050】
<付記5>
付記1乃至4のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択することができることを特徴とする目標追尾処理装置。
【0051】
<付記6>
付記5に記載の目標追尾処理装置であって、
前記データ選択テーブルには、全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位が、当該推定ユニットに設定された前記航跡モデルに応じて設定されていることを特徴とする目標追尾処理装置。
【0052】
<付記7>
付記1乃至6のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットに設定されている航跡モデルに応じて、前記推定ユニット毎の航跡推定を行う周期が設定されていることを特徴とする目標追尾処理装置。
【0053】
<付記8>
飛翔する目標を追尾するために、この目標の航跡を推定する目標追尾処理方法であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定ステップによる判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡とする複数の推定ステップと、を含むことを特徴とする目標追尾処理方法。
【0054】
<付記9>
付記8に記載の目標追尾処理方法であって、
複数の前記ユニット予測航跡を統合して、前記目標に対する航跡として出力する統合ステップを含むことを特徴とする目標追尾処理方法。
【0055】
<付記10>
付記8又は9に記載の目標追尾処理方法であって、
前記相関ゲート判定ステップは、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを生成するステップを含むことを特徴とする目標追尾処理方法。
【0056】
<付記11>
付記8乃至10のいずれか1項に記載の目標追尾処理方法であって、
前記推定ステップは、当該推定ステップに設定された前記航跡モデルに適した前記観測データを選択するデータ選択ステップを含むことを特徴とする目標追尾処理方法。
【0057】
<付記12>
付記8乃至11のいずれか1項に記載の目標追尾処理方法であって、
前記データ選択ステップは、前記観測データを選択する際に、推定ユニット毎に設定された前記航跡モデルに適する前記観測データを当該推定ユニットに設定されたデータ選択テーブルに基づき選択するステップを含むことを特徴とする目標追尾処理方法。
【0058】
<付記13>
付記12に記載の目標追尾処理方法であって、
全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位に基づき、前記観測データを選択するステップを含むことを特徴とする目標追尾処理方法。
【0059】
<付記14>
付記8乃至13のいずれか1項に記載の目標追尾処理方法であって、
前記予測ステップは、前記航跡モデルに対応して予め設定された航跡推定の周期に従い航跡推定を行うことを特徴とする目標追尾処理方法。
【符号の説明】
【0060】
2 目標追尾処理装置
11a〜11d レーダ
21 相関ゲート判定部
22(22a〜22n) データ選択部
23(23a〜23n) 平滑化部
24(24a〜24n) 予測部
25(25a〜25n) 推定ユニット
26 統合部
30a,30b データ選択テーブル
31 相関ゲート項目
32 選択判断項目
33 優先度項目
34 観測機器項目
35 相関結果項目
36 選択結果項目
【特許請求の範囲】
【請求項1】
飛翔する目標の航跡を推定する目標追尾処理装置であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定部による判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする目標追尾処理装置。
【請求項2】
請求項1に記載の目標追尾処理装置であって、
前記相関ゲート判定部は、前記ユニット予測航跡毎に単数又は複数の相関ゲートを設定することを特徴とする目標追尾処理装置。
【請求項3】
請求項1又は2に記載の目標追尾処理装置であって、
前記推定ユニットは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択することができることを特徴とする目標追尾処理装置。
【請求項4】
請求項3に記載の目標追尾処理装置であって、
前記データ選択テーブルには、全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位が、当該推定ユニットに設定された前記航跡モデルに応じて設定されていることを特徴とする目標追尾処理装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットに設定されている前記航跡モデルに応じて、前記推定ユニット毎の航跡推定を行う複数の周期が設定されていることを特徴とする目標追尾処理装置。
【請求項6】
飛翔する目標の航跡を推定する目標追尾処理方法であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定ステップによる判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡とする複数の推定ステップと、を含むことを特徴とする目標追尾処理方法。
【請求項7】
請求項6に記載の目標追尾処理方法であって、
前記相関ゲート判定ステップは、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを生成するステップを含むことを特徴とする目標追尾処理方法。
【請求項8】
請求項6又は7に記載の目標追尾処理方法であって、
前記データ選択ステップは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択するステップを含むことを特徴とする目標追尾処理方法。
【請求項9】
請求項8に記載の目標追尾処理方法であって、
全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位に基づき、前記観測データを選択するステップを含むことを特徴とする目標追尾処理方法。
【請求項10】
請求項6乃至9のいずれか1項に記載の目標追尾処理方法であって、
前記推定ステップは、前記航跡モデルに対応して予め設定された航跡推定の複数の周期に従い航跡推定を行うことを特徴とする目標追尾処理方法。
【請求項1】
飛翔する目標の航跡を推定する目標追尾処理装置であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部と、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定部による判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡として出力する複数の推定ユニットと、を備えることを特徴とする目標追尾処理装置。
【請求項2】
請求項1に記載の目標追尾処理装置であって、
前記相関ゲート判定部は、前記ユニット予測航跡毎に単数又は複数の相関ゲートを設定することを特徴とする目標追尾処理装置。
【請求項3】
請求項1又は2に記載の目標追尾処理装置であって、
前記推定ユニットは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択することができることを特徴とする目標追尾処理装置。
【請求項4】
請求項3に記載の目標追尾処理装置であって、
前記データ選択テーブルには、全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位が、当該推定ユニットに設定された前記航跡モデルに応じて設定されていることを特徴とする目標追尾処理装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の目標追尾処理装置であって、
前記推定ユニットに設定されている前記航跡モデルに応じて、前記推定ユニット毎の航跡推定を行う複数の周期が設定されていることを特徴とする目標追尾処理装置。
【請求項6】
飛翔する目標の航跡を推定する目標追尾処理方法であって、
前記目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定ステップと、
互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した前記観測データを前記相関ゲート判定ステップによる判定結果に基づき選択して前記目標の航跡を推定しまた予測し、該予測結果を前記ユニット予測航跡とする複数の推定ステップと、を含むことを特徴とする目標追尾処理方法。
【請求項7】
請求項6に記載の目標追尾処理方法であって、
前記相関ゲート判定ステップは、前記ユニット予測航跡毎に対して単数又は複数の相関ゲートを生成するステップを含むことを特徴とする目標追尾処理方法。
【請求項8】
請求項6又は7に記載の目標追尾処理方法であって、
前記データ選択ステップは、それぞれ前記観測データを選択する際の選択基準をなすデータ選択テーブルを備え、該推定ユニット及び異なる推定ユニットと相関した観測データを該推定ユニットのために選択するステップを含むことを特徴とする目標追尾処理方法。
【請求項9】
請求項8に記載の目標追尾処理方法であって、
全ての観測機器から出力される全ての前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位、又は、前記観測機器毎に出力される前記観測データの中から前記推定ユニットに適した前記観測データを選択する際の優先順位に基づき、前記観測データを選択するステップを含むことを特徴とする目標追尾処理方法。
【請求項10】
請求項6乃至9のいずれか1項に記載の目標追尾処理方法であって、
前記推定ステップは、前記航跡モデルに対応して予め設定された航跡推定の複数の周期に従い航跡推定を行うことを特徴とする目標追尾処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−145367(P2012−145367A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−2107(P2011−2107)
【出願日】平成23年1月7日(2011.1.7)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月7日(2011.1.7)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]