
目標追尾装置および目標追尾方法
【課題】ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置を提供する。
【解決手段】目標の信号を検出する目標検出器10と、目標検出器10により検出した信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブとの相関の程度を計算し、レンジサイドローブ相関処理の相関計算結果から重み付け計算によって目標検出器10により検出した信号に対し重み付けを行い、重み付け計算の結果を考慮したMHT(Multiple Hypothesis Tracking)により追尾処理を行う追尾処理器20と、追尾処理器20の結果を表示するための航跡表示器30を備える。
【解決手段】目標の信号を検出する目標検出器10と、目標検出器10により検出した信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブとの相関の程度を計算し、レンジサイドローブ相関処理の相関計算結果から重み付け計算によって目標検出器10により検出した信号に対し重み付けを行い、重み付け計算の結果を考慮したMHT(Multiple Hypothesis Tracking)により追尾処理を行う追尾処理器20と、追尾処理器20の結果を表示するための航跡表示器30を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機や船舶等の目標を探知するレーダー装置を用いた目標追尾装置および目標追尾方法に関する。
【背景技術】
【0002】
従来、レーダー装置の目標追尾方式として、例えば、特開2002−98755号公報(特許文献1)に記載された追尾方式(目標追尾措置)がある。
特許文献1(特開2002−98755号公報)には、「観測ベクトルと航跡の相関に関して、それぞれの観測ベクトルが既存航跡と相関する可能性、新航跡である可能性、誤信号である可能性を考慮し、複数の仮説を維持しつつ追尾処理を行う延期決定型の目標追尾装置において、航跡相関行列と既存の仮説から新しい仮説を作成する仮説更新部が、仮説の信頼度計算に目標観測装置からのそれぞれの観測ベクトル毎に得られる情報を利用することを特徴とする目標追尾装置」が記載されている。
【0003】
特開2002−98755号公報における目標追尾方式では、仮説の信頼度を計算する際に、レーダー装置(目標観測装置)から得られる観測ベクトルおよび信号のS/N比による重み付けを考慮し行う。
なお、「時刻t−1の航跡」に対し、「時刻tに検出した目標の信号」が、「時刻t−1の航跡」の目標信号であると仮定した場合、その仮定を「仮説」といい、その仮定に対する確からしさを「信頼度」という。
【特許文献1】特開2002−98755号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、例えば特許文献1による従来の目標追尾方式では、仮説の信頼度計算に対して観測ベクトルに信号のS/N比の情報を適用する方法についての考え方は示しているが、信号のS/N比による重み付けの手法については示されていない。
また、従来のレーダー装置では、S/N比を具体的に目標追尾に組み込む方法は示されていない。
一般的に、目標を検出するためにパルス圧縮技術が用いられる。
パルス圧縮を実施すると、レンジサイドローブと呼ばれる不要信号が目標信号の近傍に現れる。
【0005】
レンジサイドローブは目標信号よりも必ず低いS/N比となることが判っているので、目標信号とレンジサイドローブのレベル比(差)および距離を事前に予測することが可能である。(これをレンジサイドローブパターンと称することとする。)
従来では、レンジサイドローブの対策として、パルス圧縮時にウェイティング手法を利用してレンジサイドローブを用いているが、目標信号のS/N比が低くなるというデメリットがある。
【0006】
この発明は、上記のような課題を解消するためになされたもので、レンジサイドローブパターンがパルス圧縮の諸元(例えば、周波数の変化量やパルス幅)により予測できることに着目し、パルス圧縮におけるウェイティング無しで、レンジサイドローブにより発生する誤航跡を抑圧して、ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置あるいは目標追尾方法を提供することを目的とする。
【0007】
なお、「パルス圧縮」とは、長いパルスを短いパルスに圧縮する技術であって、送信平均電力を維持しつつ、短いパルスの距離分解能の性能を満足するための技術である。
パルス自体の電力は保持されるため、圧縮後のパルスの振幅は、圧縮前より大きくなり、目標を探知し易くなる。
また、「ウェイティング」とは、パルス圧縮時に発生するレンジサイドローブを抑圧する処理のことをいう。
一般に、ウェイティングを行うと、S/N比の劣化を伴い、探知距離が減る。
本発明では、S/N比の劣化を防ぐためにウェイティンクを削除している。
【課題を解決するための手段】
【0008】
この発明に係る目標追尾装置は、目標の信号を検出する目標検出手段と、上記目標検出手段により検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段、上記レンジサイドローブ相関処理手段の相関計算結果から上記目標検出手段により検出した上記目標の信号に対して重み付け計算を行う重み付け計算手段、上記重み付け計算手段による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、上記目標の追尾処理を行う追尾処理手段と、上記追尾処理手段による目標対追尾結果を表示する航跡表示手段を備えたものである。
【0009】
また、この発明に係る目標追尾方法は、目標の信号を検出する目標検出カステップと、
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなるものである。
【発明の効果】
【0010】
本発明によれば、S/N比による観測ベクトルへの重み付け(ウェイティング)の手法について明確化することで、仮説の信頼度計算の具体設計ができる。
また、パルス圧縮におけるウェイティングをすることなく、レンジサイドローブにより発生する誤航跡を抑圧することができるため、ウェイティングによる信号レベルの劣化を防ぐことができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
以下、図面に基づいてこの発明の実施の形態1について説明する。
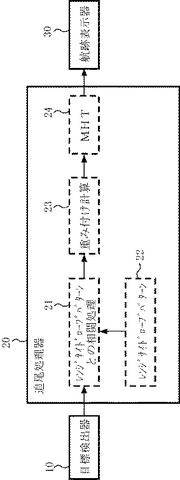
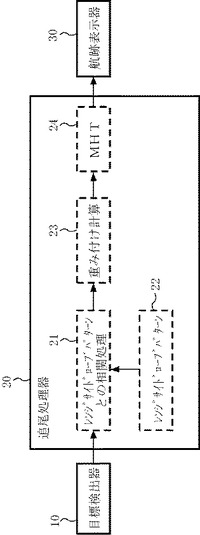
図1は、実施の形態1による目標追尾装置の構成を示すブロック図である。
図1において、10は受信信号から目標の信号(即ち、目標で反射されてくるレーダー信号)を検出するための目標検出器(目標検出手段)、20は目標検出器(目標検出手段)10が検出する検出信号に対し追尾処理を行うための追尾処理器(追尾処理手段)、30は追尾処理器(追尾処理手段)20により得られる追尾処理の結果(即ち、航跡)を表示するための航跡表示器(航跡表示手段)である。
【0012】
追尾処理器(追尾処理手段)20は、目標検出器(目標検出手段)10が検出する検出信号に対してレンジサイドローブとの相関の程度を計算するためのレンジサイドローブ相関処理手段21、該レンジサイドローブ相関処理手段21がレンジサイドローブ相関処理を行う際に用いるレーダー装置のレンジサイドローブパターン22、レンジサイドローブ相関処理手段21によるレンジサイドローブ相関処理の結果から追尾処理器(追尾処理手段)20により検出された信号の重み付けを計算する重み付け計算手段23、追尾処理において、信号の観測ベクトルおよび重み付け(ウェイティング)計算手段23の計算結果を用いて仮説の信頼度計算を実施するためのMHT(Multiple Hypothesis Tracking)24で構成されている。
【0013】
なお、前述したように、「時刻t−1の航跡」に対し、「時刻tに検出した目標の信号」が、「時刻t−1の航跡」の目標信号であると仮定した場合、その仮定を仮説という。
そして、その仮説は検出した信号分について発生する。
追尾動作を維持するためには、複数の仮説の中から航跡に対する目標信号を判定しなければならない。
従って、各仮説に対して、現在追尾中の目標である確率を計算し、航跡と目標信号との対応に様々な組み合わせが考えられて1つに決められない場合、確からしい複数の仮説を保持しながら追尾を維持する。このようなアルゴリズムを“MHT”という。
【0014】
次に、動作について説明する。
まず、目標検出器10により検出された目標の信号が追尾処理器20へ出力される。
次に、目標検出器10から出力された信号は、追尾処理器20において、以前の追尾結果から算出された目標の予測位置と目標検出器10から出力される信号との相関を計算し、追尾対象となる目標の信号を算出する追尾処理を行う。
追尾処理の際に、レンジサイドローブによる誤目標追尾を抑圧するため、レンジサイドローブ相関処理手段21は、検出した目標の観測ベクトルとS/N比からレンジサイドローブパターン22との相関を計算し、レンジサイドローブである確からしさを求め、レンジサイドローブである確からしさが高い目標については相関対象から外す処理を行う。
【0015】
以上の追尾処理の結果から、次に目標検出器から検出される信号の位置を予測し、前述の追尾処理を繰り返すことにより追尾維持を行う。
このように、本実施の形態においては、レンジサイドローブによる誤目標追尾が抑圧できるため、レンジサイドローブ自体を抑圧する際に生じる、信号レベルの劣化を防ぐことができ、レーダーの性能は向上することが期待できる。
【0016】
レンジサイドローブパターン22の適用方法について説明する。
レンジサイドローブパターン22は、予めシミュレーション等により、ビームごとに、ノイズフリーで第1サイドローブから第kサイドローブ(kはパラメータ)までのメインローブとのレンジ差ΔRk、S/N差ΔPkを求めておく。
【0017】
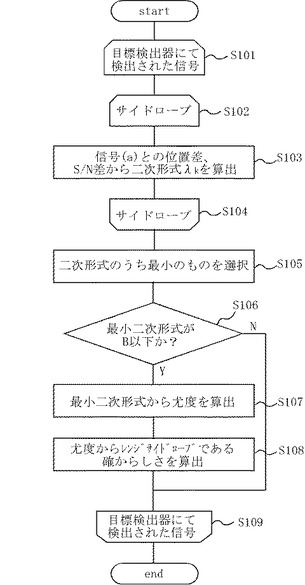
図2は、レンジサイドローブで検出された信号(不要信号)を判別するための重み付け算出フローを示す図である。
また、重み付けを考慮したMHTの信頼度計算を式(1)に示す。
なお、MHT信頼度計算式を示す式(1)において、Pl(Zm)およびPs(Zm)が重み付けに相当している。
【0018】
【数1】

【0019】
図2のフローチャートに基づいて、本実施の形態における重み付け算出ステップについて説明する。
まず、当該信号(即ち、目標検出器10にて検出された信号)を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)と呼ぶ)の有無を調べる。(ステップS101)
信号(a)が無い場合、当該信号については、重み付けを行わないが、信号(a)が有る場合、当該信号についてレンジ差およびS/N差から、レンジサイドローブパターンにおいて、該当すると思われるレンジサイドローブを抽出する。(ステップS102)
【0020】
レンジサイドローブ相関処理手段21は、抽出されたレンジサイドローブパターンと当該信号について相関を実施し、重み付け計算手段23は、相関結果により信号の重み付け(レンジサイドローブである確率:Ps、目標である確率:Pt)を算出する。
ステップS101において、目標検出器10にて検出された信号を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)が有る場合、当該信号とレンジサイドローブのレンジ差△RkおよびS/N比の差△Pkから、当該信号と信号(a)とのレンジ差△R0およびS/N比の差△P0との分散値を算出し、パラメータとして設定しているレンジ差およびS/N比の差の分散値σRk2、σPk2と比較した結果を式(2)の2次形式λkとして算出する。
信号(a)に対して、第1レンジサイドローブから第nレンジサイドローブについて、式(2)を算出する。(ステップS103)
【0021】
【数2】
【0022】
次に、S103において算出したサイドローブ(ステップS104)について最もλkが小さい値(λmin)となるものを選択し(ステップS105)、選択したサイドローブのλminが所定の閾値(B)以下であるかを判定する。(ステップS106)
ステップS106での判定後、λminが所定の閾値(B)以下でない場合には、レンジサイドローブとの相関はなく、目標とは異なるとして扱う。
ステップS106での判定後、λminが所定の閾値(B)以下であると判定した場合は、正規分布の密度関数から尤度gを式(3)に基づいて算出する。(ステップS107)
【0023】
【数3】
【0024】
次に、ステップS107で求めた尤度gを用いて、式(4)のとおりレンジサイドローブである確率Psを算出する。
【0025】
【数4】
【0026】
目標の信号である確率であるPtは、Pt=1−Psより求める。
Psは0から1の値でありね1に近いほどレンジサイドローブである可能性が高いと見なす。
重み付けについては、式(1)のMHT信頼度計算式にステップ106で求めた確率が反映されている。
レンジサイドローブである確率Psが大きいならば、当該信号を不要信号として扱い、航跡確立の確立を低くし、誤航跡の発生を抑圧する。
【0027】
以上説明したように、本実施の形態による目標追尾装置は、目標の信号を検出する目標検出手段(目標検出器)10と、目標検出手段10により検出した目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段21、該レンジサイドローブ相関処理手段21の相関計算結果から目標検出手段10により検出した目標の信号に対して重み付け計算を行う重み付け計算手段23、該重み付け計算手段23による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、目標の追尾処理を行う追尾処理手段(追尾処理器)20と、該追尾処理手段20による目標対追尾結果を表示する航跡表示手段(航跡表示器)30を備えている。
【0028】
従って、本実施の形態によれば、パルス圧縮におけるウェイティングをすることなく、レンジサイドローブにより発生する誤航跡を抑圧することが可能であり、ウェイティングによる信号レベルの劣化を防ぐことができる。
【産業上の利用可能性】
【0029】
この発明は、ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置の実現に有用である。
【図面の簡単な説明】
【0030】
【図1】実施の形態1による目標追尾装置の構成を示すブロック図である。
【図2】レンジサイドローブで検出された信号を判別するための重み付け算出フローを示す図である。
【符号の説明】
【0031】
10 目標検出器(目標検出手段)
20 追尾処理器(追尾処理手段)
21 レンジサイドローブ相関処理手段
22 レンジサイドローブパターン
23 重み付け(ウェイティング)計算手段
24 MHT(Multiple Hypothesis Tracking)
30 航跡表示器(航跡表示手段)
【技術分野】
【0001】
本発明は、航空機や船舶等の目標を探知するレーダー装置を用いた目標追尾装置および目標追尾方法に関する。
【背景技術】
【0002】
従来、レーダー装置の目標追尾方式として、例えば、特開2002−98755号公報(特許文献1)に記載された追尾方式(目標追尾措置)がある。
特許文献1(特開2002−98755号公報)には、「観測ベクトルと航跡の相関に関して、それぞれの観測ベクトルが既存航跡と相関する可能性、新航跡である可能性、誤信号である可能性を考慮し、複数の仮説を維持しつつ追尾処理を行う延期決定型の目標追尾装置において、航跡相関行列と既存の仮説から新しい仮説を作成する仮説更新部が、仮説の信頼度計算に目標観測装置からのそれぞれの観測ベクトル毎に得られる情報を利用することを特徴とする目標追尾装置」が記載されている。
【0003】
特開2002−98755号公報における目標追尾方式では、仮説の信頼度を計算する際に、レーダー装置(目標観測装置)から得られる観測ベクトルおよび信号のS/N比による重み付けを考慮し行う。
なお、「時刻t−1の航跡」に対し、「時刻tに検出した目標の信号」が、「時刻t−1の航跡」の目標信号であると仮定した場合、その仮定を「仮説」といい、その仮定に対する確からしさを「信頼度」という。
【特許文献1】特開2002−98755号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、例えば特許文献1による従来の目標追尾方式では、仮説の信頼度計算に対して観測ベクトルに信号のS/N比の情報を適用する方法についての考え方は示しているが、信号のS/N比による重み付けの手法については示されていない。
また、従来のレーダー装置では、S/N比を具体的に目標追尾に組み込む方法は示されていない。
一般的に、目標を検出するためにパルス圧縮技術が用いられる。
パルス圧縮を実施すると、レンジサイドローブと呼ばれる不要信号が目標信号の近傍に現れる。
【0005】
レンジサイドローブは目標信号よりも必ず低いS/N比となることが判っているので、目標信号とレンジサイドローブのレベル比(差)および距離を事前に予測することが可能である。(これをレンジサイドローブパターンと称することとする。)
従来では、レンジサイドローブの対策として、パルス圧縮時にウェイティング手法を利用してレンジサイドローブを用いているが、目標信号のS/N比が低くなるというデメリットがある。
【0006】
この発明は、上記のような課題を解消するためになされたもので、レンジサイドローブパターンがパルス圧縮の諸元(例えば、周波数の変化量やパルス幅)により予測できることに着目し、パルス圧縮におけるウェイティング無しで、レンジサイドローブにより発生する誤航跡を抑圧して、ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置あるいは目標追尾方法を提供することを目的とする。
【0007】
なお、「パルス圧縮」とは、長いパルスを短いパルスに圧縮する技術であって、送信平均電力を維持しつつ、短いパルスの距離分解能の性能を満足するための技術である。
パルス自体の電力は保持されるため、圧縮後のパルスの振幅は、圧縮前より大きくなり、目標を探知し易くなる。
また、「ウェイティング」とは、パルス圧縮時に発生するレンジサイドローブを抑圧する処理のことをいう。
一般に、ウェイティングを行うと、S/N比の劣化を伴い、探知距離が減る。
本発明では、S/N比の劣化を防ぐためにウェイティンクを削除している。
【課題を解決するための手段】
【0008】
この発明に係る目標追尾装置は、目標の信号を検出する目標検出手段と、上記目標検出手段により検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段、上記レンジサイドローブ相関処理手段の相関計算結果から上記目標検出手段により検出した上記目標の信号に対して重み付け計算を行う重み付け計算手段、上記重み付け計算手段による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、上記目標の追尾処理を行う追尾処理手段と、上記追尾処理手段による目標対追尾結果を表示する航跡表示手段を備えたものである。
【0009】
また、この発明に係る目標追尾方法は、目標の信号を検出する目標検出カステップと、
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなるものである。
【発明の効果】
【0010】
本発明によれば、S/N比による観測ベクトルへの重み付け(ウェイティング)の手法について明確化することで、仮説の信頼度計算の具体設計ができる。
また、パルス圧縮におけるウェイティングをすることなく、レンジサイドローブにより発生する誤航跡を抑圧することができるため、ウェイティングによる信号レベルの劣化を防ぐことができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
以下、図面に基づいてこの発明の実施の形態1について説明する。
図1は、実施の形態1による目標追尾装置の構成を示すブロック図である。
図1において、10は受信信号から目標の信号(即ち、目標で反射されてくるレーダー信号)を検出するための目標検出器(目標検出手段)、20は目標検出器(目標検出手段)10が検出する検出信号に対し追尾処理を行うための追尾処理器(追尾処理手段)、30は追尾処理器(追尾処理手段)20により得られる追尾処理の結果(即ち、航跡)を表示するための航跡表示器(航跡表示手段)である。
【0012】
追尾処理器(追尾処理手段)20は、目標検出器(目標検出手段)10が検出する検出信号に対してレンジサイドローブとの相関の程度を計算するためのレンジサイドローブ相関処理手段21、該レンジサイドローブ相関処理手段21がレンジサイドローブ相関処理を行う際に用いるレーダー装置のレンジサイドローブパターン22、レンジサイドローブ相関処理手段21によるレンジサイドローブ相関処理の結果から追尾処理器(追尾処理手段)20により検出された信号の重み付けを計算する重み付け計算手段23、追尾処理において、信号の観測ベクトルおよび重み付け(ウェイティング)計算手段23の計算結果を用いて仮説の信頼度計算を実施するためのMHT(Multiple Hypothesis Tracking)24で構成されている。
【0013】
なお、前述したように、「時刻t−1の航跡」に対し、「時刻tに検出した目標の信号」が、「時刻t−1の航跡」の目標信号であると仮定した場合、その仮定を仮説という。
そして、その仮説は検出した信号分について発生する。
追尾動作を維持するためには、複数の仮説の中から航跡に対する目標信号を判定しなければならない。
従って、各仮説に対して、現在追尾中の目標である確率を計算し、航跡と目標信号との対応に様々な組み合わせが考えられて1つに決められない場合、確からしい複数の仮説を保持しながら追尾を維持する。このようなアルゴリズムを“MHT”という。
【0014】
次に、動作について説明する。
まず、目標検出器10により検出された目標の信号が追尾処理器20へ出力される。
次に、目標検出器10から出力された信号は、追尾処理器20において、以前の追尾結果から算出された目標の予測位置と目標検出器10から出力される信号との相関を計算し、追尾対象となる目標の信号を算出する追尾処理を行う。
追尾処理の際に、レンジサイドローブによる誤目標追尾を抑圧するため、レンジサイドローブ相関処理手段21は、検出した目標の観測ベクトルとS/N比からレンジサイドローブパターン22との相関を計算し、レンジサイドローブである確からしさを求め、レンジサイドローブである確からしさが高い目標については相関対象から外す処理を行う。
【0015】
以上の追尾処理の結果から、次に目標検出器から検出される信号の位置を予測し、前述の追尾処理を繰り返すことにより追尾維持を行う。
このように、本実施の形態においては、レンジサイドローブによる誤目標追尾が抑圧できるため、レンジサイドローブ自体を抑圧する際に生じる、信号レベルの劣化を防ぐことができ、レーダーの性能は向上することが期待できる。
【0016】
レンジサイドローブパターン22の適用方法について説明する。
レンジサイドローブパターン22は、予めシミュレーション等により、ビームごとに、ノイズフリーで第1サイドローブから第kサイドローブ(kはパラメータ)までのメインローブとのレンジ差ΔRk、S/N差ΔPkを求めておく。
【0017】
図2は、レンジサイドローブで検出された信号(不要信号)を判別するための重み付け算出フローを示す図である。
また、重み付けを考慮したMHTの信頼度計算を式(1)に示す。
なお、MHT信頼度計算式を示す式(1)において、Pl(Zm)およびPs(Zm)が重み付けに相当している。
【0018】
【数1】
【0019】
図2のフローチャートに基づいて、本実施の形態における重み付け算出ステップについて説明する。
まず、当該信号(即ち、目標検出器10にて検出された信号)を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)と呼ぶ)の有無を調べる。(ステップS101)
信号(a)が無い場合、当該信号については、重み付けを行わないが、信号(a)が有る場合、当該信号についてレンジ差およびS/N差から、レンジサイドローブパターンにおいて、該当すると思われるレンジサイドローブを抽出する。(ステップS102)
【0020】
レンジサイドローブ相関処理手段21は、抽出されたレンジサイドローブパターンと当該信号について相関を実施し、重み付け計算手段23は、相関結果により信号の重み付け(レンジサイドローブである確率:Ps、目標である確率:Pt)を算出する。
ステップS101において、目標検出器10にて検出された信号を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)が有る場合、当該信号とレンジサイドローブのレンジ差△RkおよびS/N比の差△Pkから、当該信号と信号(a)とのレンジ差△R0およびS/N比の差△P0との分散値を算出し、パラメータとして設定しているレンジ差およびS/N比の差の分散値σRk2、σPk2と比較した結果を式(2)の2次形式λkとして算出する。
信号(a)に対して、第1レンジサイドローブから第nレンジサイドローブについて、式(2)を算出する。(ステップS103)
【0021】
【数2】
【0022】
次に、S103において算出したサイドローブ(ステップS104)について最もλkが小さい値(λmin)となるものを選択し(ステップS105)、選択したサイドローブのλminが所定の閾値(B)以下であるかを判定する。(ステップS106)
ステップS106での判定後、λminが所定の閾値(B)以下でない場合には、レンジサイドローブとの相関はなく、目標とは異なるとして扱う。
ステップS106での判定後、λminが所定の閾値(B)以下であると判定した場合は、正規分布の密度関数から尤度gを式(3)に基づいて算出する。(ステップS107)
【0023】
【数3】
【0024】
次に、ステップS107で求めた尤度gを用いて、式(4)のとおりレンジサイドローブである確率Psを算出する。
【0025】
【数4】
【0026】
目標の信号である確率であるPtは、Pt=1−Psより求める。
Psは0から1の値でありね1に近いほどレンジサイドローブである可能性が高いと見なす。
重み付けについては、式(1)のMHT信頼度計算式にステップ106で求めた確率が反映されている。
レンジサイドローブである確率Psが大きいならば、当該信号を不要信号として扱い、航跡確立の確立を低くし、誤航跡の発生を抑圧する。
【0027】
以上説明したように、本実施の形態による目標追尾装置は、目標の信号を検出する目標検出手段(目標検出器)10と、目標検出手段10により検出した目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段21、該レンジサイドローブ相関処理手段21の相関計算結果から目標検出手段10により検出した目標の信号に対して重み付け計算を行う重み付け計算手段23、該重み付け計算手段23による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、目標の追尾処理を行う追尾処理手段(追尾処理器)20と、該追尾処理手段20による目標対追尾結果を表示する航跡表示手段(航跡表示器)30を備えている。
【0028】
従って、本実施の形態によれば、パルス圧縮におけるウェイティングをすることなく、レンジサイドローブにより発生する誤航跡を抑圧することが可能であり、ウェイティングによる信号レベルの劣化を防ぐことができる。
【産業上の利用可能性】
【0029】
この発明は、ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置の実現に有用である。
【図面の簡単な説明】
【0030】
【図1】実施の形態1による目標追尾装置の構成を示すブロック図である。
【図2】レンジサイドローブで検出された信号を判別するための重み付け算出フローを示す図である。
【符号の説明】
【0031】
10 目標検出器(目標検出手段)
20 追尾処理器(追尾処理手段)
21 レンジサイドローブ相関処理手段
22 レンジサイドローブパターン
23 重み付け(ウェイティング)計算手段
24 MHT(Multiple Hypothesis Tracking)
30 航跡表示器(航跡表示手段)
【特許請求の範囲】
【請求項1】
目標の信号を検出する目標検出手段と、
上記目標検出手段により検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段、上記レンジサイドローブ相関処理手段の相関計算結果から上記目標検出手段により検出した上記目標の信号に対して重み付け計算を行う重み付け計算手段、上記重み付け計算手段による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、上記目標の追尾処理を行う追尾処理手段と、
上記追尾処理手段による目標対追尾結果を表示する航跡表示手段を備えたことを特徴とする目標追尾装置。
【請求項2】
目標の信号を検出する目標検出カステップと、
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、
上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなることを特徴とする目標追尾方法。
【請求項1】
目標の信号を検出する目標検出手段と、
上記目標検出手段により検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段、上記レンジサイドローブ相関処理手段の相関計算結果から上記目標検出手段により検出した上記目標の信号に対して重み付け計算を行う重み付け計算手段、上記重み付け計算手段による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、上記目標の追尾処理を行う追尾処理手段と、
上記追尾処理手段による目標対追尾結果を表示する航跡表示手段を備えたことを特徴とする目標追尾装置。
【請求項2】
目標の信号を検出する目標検出カステップと、
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、
上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなることを特徴とする目標追尾方法。
【図1】

【図2】
【図2】
【公開番号】特開2010−14664(P2010−14664A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−176969(P2008−176969)
【出願日】平成20年7月7日(2008.7.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月7日(2008.7.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]