
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶等の目標の追尾を行う目標追尾装置及び目標追尾方法に関する。
【背景技術】
【0002】
例えば、船舶等の衝突予防を行うARPA装置(Automatic Radar Plotting Aids)では、目標の追尾を行う目標追尾装置が設けられる。目標追尾装置では、レーダエコーの或るスキャンにおいて追尾している目標に対して、次のスキャンにおいて、その目標の周辺または過去の位置から算出したその目標の予測位置の周辺にウィンドウ(またはゲートともいう)を作成し、ウィンドウの中の目標の重心位置を求めて、それを目標の新しい位置として、順次、これを繰り返すことで、目標の追尾を行っている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3110549号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のウィンドウを設定する追尾においては次のような問題がある。
1)1つのウィンドウ内で1つの目標の追尾を行うことが原則となっているために、1つのウィンドウ内に複数のエコーが発生した場合には、そのウィンドウの中から目標のエコーを選択する必要がある。そのため、間違ったエコーを選択すると、乗り移りが発生する。特に、目標が輻輳している地帯では、1つのウィンドウ内に複数のエコーが発生することが頻繁に起こり、誤った選択がなされる可能性が高くなる。
2)追尾中の目標が急速な加減速や旋回を行った場合、ウィンドウからエコーが外れてしまう場合がある。一度ウィンドウからエコーが外れてしまうと、追尾を継続するのは非常に困難であり、目標を見失う(ロストする)結果となる。
【0005】
ウィンドウの大きさが小さいとロストの可能性があり、逆に大きければ乗り移りの可能性があり、上記1)と2)の問題はトレードオフの関係にある。特に、近年船舶等の目標の高速化により、ウィンドウを大きくとる必要があり、そのため、乗り移りの可能性が高まっている。
【0006】
本発明はかかる課題に鑑みなされたもので、その目的は、従来のウィンドウを用いた追尾の問題を解消することができる目標追尾装置及び目標追尾方法を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の請求項1記載の発明は、時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾装置において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理手段と、
マッチング処理手段で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納するマッチングデータテーブルと、
を備えることを特徴とする。
【0008】
請求項2記載の発明は、請求項1記載のものにおいて、過去の2つ以上のタイミングで取得され同じ目標識別データと関連付けられた目標位置に基づき該目標識別データに対応する目標速度を求める速度情報算出手段をさらに備え、
前記マッチング処理手段は、前記目標速度に基づきあるタイミングにおける目標予測位置を求めて、該目標予測位置とあるタイミングで取得された前記目標位置との対応付けを行うことを特徴とする。
【0009】
請求項3記載の発明は、請求項1または2記載の前記マッチング処理手段が、複数の目標位置と複数の被マッチング目標位置に対してその距離の総和が最小となるような対応付けを行うことを特徴とする。
【0010】
請求項4記載の発明は、請求項1または2記載の前記マッチング処理手段が、複数の目標位置と複数の被マッチング目標位置に対してその距離及び目標の大きさの差異の乗算の総和が最小となるような対応付けを行うことを特徴とする。
【0011】
請求項5記載の発明は、請求項3または4記載の前記マッチング処理手段が、目標位置と被マッチング目標位置との距離が所定距離を超えている場合には、該目標位置と該被マッチング目標位置との対応付けは行わないことを特徴とする請求項3または4記載の目標追尾装置。
【0012】
請求項6記載の発明は、請求項5記載の前記所定距離は、前記目標信号より得られる目標の大きさに応じて変化させることを特徴とする。
【0013】
請求項7記載の発明は、請求項5記載の前記所定距離は、目標速度の大きさに応じて変化させることを特徴とする。
【0014】
請求項8記載の発明は、請求項1ないし7のいずれか1項に記載のものにおいて、過去のタイミングで取得された目標位置または過去のタイミングで取得された目標位置及び過去の2つ以上のタイミングで取得された目標位置に基づき求めた目標速度から目標の予測位置を求めて、該予測位置を中心としたウィンドウを追尾対象の目標毎に計算するウィンドウ計算手段と、
ウィンドウ計算手段で計算されたウィンドウ内にあるデータから目標を抽出する目標抽出手段と、
を備え、前記目標抽出手段は、ウィンドウ内に目標とするべきデータが2つ以上存在するとき、またはウィンドウ内に目標とするべきデータが存在しないときに、前記マッチングデータテーブルを参照して、追尾対象の目標の目標識別データに関連付けられた目標位置を抽出することを特徴とする。
【0015】
請求項9記載の発明は、請求項1ないし8のいずれか1項に記載の前記マッチング処理手段が、
複数の目標位置と複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける仮対応付け手段と、
複数の第1目標位置が仮対応付けられた第2目標位置に対して、一つの第1目標位置を仮対応付けて、別の第1目標位置を別の第2目標位置に仮対応付ける仮対応付け選択手段と、
全ての第2目標位置に1以下の第1目標位置が仮対応付けられたときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する確定手段と、
を備えることを特徴とする。
【0016】
請求項10記載の発明は、請求項9記載の前記仮対応付け選択手段が、
同じ第2目標位置に対して仮対応付けられた2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する手段と、
Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する手段と、
を備えることを特徴とする。
【0017】
請求項11記載の発明は、時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾方法において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理工程と、
マッチング処理工程で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する工程と、
を備えることを特徴とする。
【0018】
請求項12記載の発明は、請求項11記載の方法において、
前記マッチング処理工程が、
(a) 対象となる複数の目標位置と対象となる複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける工程と、
(b) 第2目標位置に仮対応付けられた第1目標位置の数を求める工程と、
(c) 同じ第2目標位置に仮対応付けられた第1目標位置の数が2以上である場合には、その数が2つである場合に、その2つの第1目標位置X、Yを選択し、その数が3以上である場合に、任意の2つの第1目標位置X、Yを選択する工程と、
(d) 2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する工程と、
(e) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する工程と、
(f) (b)、(d)、(e)の工程を、全ての第2目標位置に1以下の第1目標位置が仮対応付けられるまで繰り返す工程と、
(g) 全ての第2目標位置に仮対応付けられた第1目標位置の数が1以下となったときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する工程と、
を備えることを特徴とする。
【発明の効果】
【0019】
本発明によれば、1つの目標にのみ着目してウィンドウを設定する従来と異なり、複数の目標位置と複数の被マッチング目標位置との対応付けを行うので、ウィンドウ内といった局所的な情報だけでは得られなかった周辺の目標の運動を考慮した目標追尾が可能となり、正確な追尾が可能となる。また、ウィンドウを設定する手段と組み合わせて精度を上げることも可能である。
【0020】
これによって輻輳地域においても、乗り移りを抑制した正確な追尾が可能となる。また、追尾中の目標が急速な加減速や旋回を行った場合でも、全体として最適な組み合わせを求めるので、ロストを抑制した正確な追尾が可能となる。つまり、ある注目する目標が急速な加減速や旋回を行っても、周りの目標の追尾が継続できていれば、その注目した目標を容易に見つけることができるようになる。
【図面の簡単な説明】
【0021】
【図1】本発明による目標追尾方法に従った目標追尾装置の第1実施形態のブロック図である。
【図2】本発明による目標追尾方法に従った目標追尾装置の第2実施形態のブロック図である。
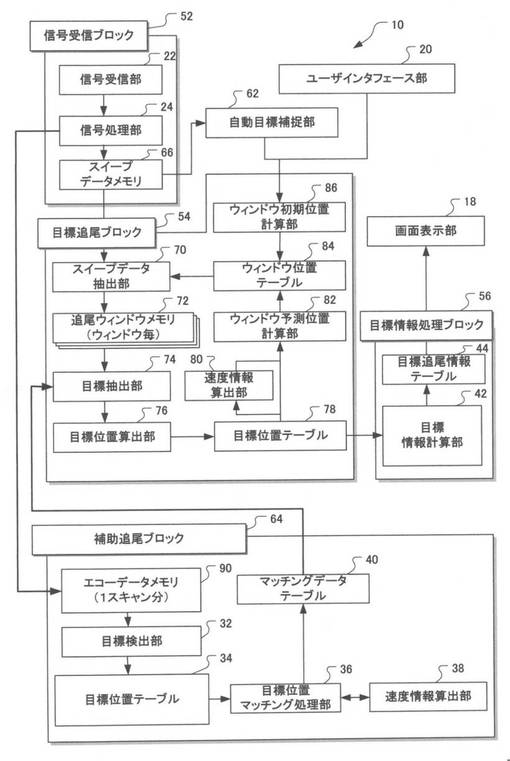
【図3】本発明による目標追尾方法に従った目標追尾装置の第3実施形態のブロック図である。
【図4】マッチング処理の具体的なアルゴリズムを表すフローチャートである。
【図5】図4によるマッチング処理の具体例である。
【図6】図5の例において、従来のウィンドウ方式との違いを説明する説明図である。
【図7】目標の予測位置を求めるための一例を表す説明図である。
【図8】目標の位置を求めるための様々な例を表す説明図である。
【発明を実施するための形態】
【0022】
以下、図面を用いて本発明の実施の形態を説明する。
【0023】
(第1実施形態)
図1は、本発明による目標追尾方法に従った目標追尾装置10の第1実施形態のブロック図を表している。この例の目標追尾装置10は、ARPA装置に搭載されたものとしている。しかしながら、目標追尾装置10は、周囲の海上または空中の船舶または飛行体といった目標を監視するために移動体自体に搭載する他に、海上または空中の船舶または飛行体といった目標を監視するために地上等に定置することができる。
【0024】
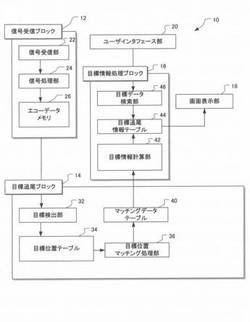
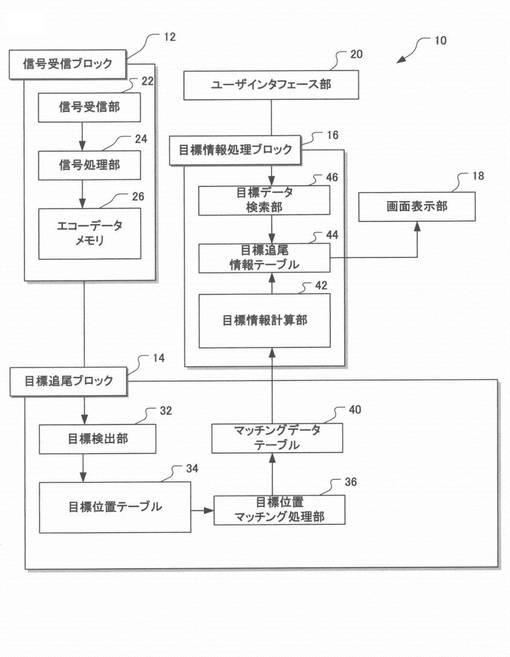
図示したように、目標追尾装置10は、大別して、信号受信ブロック12、目標追尾ブロック14、目標情報処理ブロック16、画面表示部18及びユーザインターフェース部20と、を有している。
【0025】
信号受信ブロック12には、外部から目標エコー信号または目標信号が入力される。信号受信ブロック12に入力される信号としては、目標位置検出手段であるレーダ装置から出力されたビデオ信号とすることができる。この場合、レーダアンテナが1つのパルスを送信し、それに対する反射波を受信するときの、その期間を1スイープと呼び、レーダアンテナが1回転する期間を1スキャンと呼ぶ。各パルスの真方位は、レーダアンテナから得られる方位(相対方位)に、ジャイロ等で得られるレーダアンテナのヘディング方位を加えることで求められる。
【0026】
そして、信号受信ブロック12は、入力されたビデオ信号を検波する信号受信部22と、ビデオ信号に対してノイズ除去などの各種信号処理を行う信号処理部24と、1スキャン毎に更新して1または複数スキャン分のエコーデータを格納するエコーデータメモリ26を有する。
【0027】
ここで、信号処理部24は、エコーデータメモリ26に格納する前処理として、複数スキャン分のエコーデータを格納することで、スキャン相関処理を行ってノイズ等を除去することも可能である。
【0028】
尚、信号受信ブロック12は、目標追尾装置10が直接接続された目標位置検出手段であるレーダ装置からの信号を受信する他、目標追尾装置10とは異なる移動体または目標追尾装置10とは離れた地上に設置された目標位置検出手段であるレーダ装置からの信号を何らかの手段で受信してもよい。スレーブレーダ装置からの信号を直接に受信してもよく、また、レーザ装置またはその他の任意の目標位置検出手段から得られた信号をデジタルデータで受信してもよく、または、デジタルデータを任意の通信ネットワークを介して受信してもよい。いずれにしても、目標位置検出手段に対してある領域に着目したときに、その領域内に存在する目標を表す目標信号が時系列的に取得されて、その目標信号が信号受信ブロック12に入力されればよい。また、信号受信ブロック12に入力される前処理として、目標位置検出手段からの目標信号に対して、地図データを用いて地図データに基づき陸等の固定物を除去する処理を行った後に、信号受信ブロック12に目標信号を入力するようにしてもよい。また、目標を検出する前に、AISデータを用いて、追尾する必要のない既知の目標を除去する処理を行うようにしてもよい。
【0029】
目標追尾ブロック14は、目標検出部32と、目標位置テーブル34と、目標位置マッチング処理部36と、マッチングデータテーブル40と、を有する。
【0030】
目標検出部32は、エコーデータメモリ26に格納された1スキャン分のデータから目標の位置を検出する。そのためにまず、目標エコーを抽出する。その抽出する方法としては、次の方法が考えられる。
【0031】
(1)デジタルデータをある閾値を用いて二値化した後、距離方向、及び方位方向にある一定以上の連続性のある部分を検出して目標エコーとするか、または、ラベリングなどの画像処理手法によってエコーの塊の分離を行い、ある一定サイズ以上の塊を目標エコーとする。
(2)デジタルデータの値の2次元的な傾きを求め、極大となっている部分を目標位置とする。または、デジタルデータの値の変化量(傾き)が一定以上の部分を、目標エコーの境界として検出する。
(3)アナログ信号からそのまま目標を検出する方法として、スプリットゲート方式(吉田孝「改訂レーダ技術」、p.264、電子情報通信学会(1996))を用い、アナログ信号を進みゲートと遅れゲートを通過させ、信号の中央部で両ゲートの差分が0となることを利用して目標エコーを検出する。
【0032】
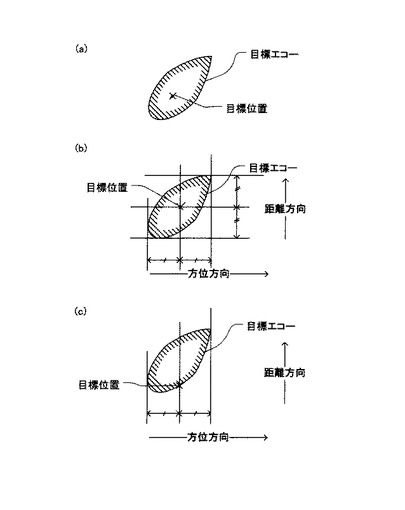
また、検出した目標エコーから目標位置を決定するには、次の方法が考えられる(図8参照)。
(1)目標エコーの塊の重心位置を目標位置とする(図8(a))。
(2)目標エコーの距離方向及び方位方向の中心位置を目標位置とする(図8(b))。
(3)目標エコーの方位方向の中心位置、かつ距離方向の最もアンテナに近い位置を目標位置とする(図8(c))。
【0033】
また、信号受信ブロック12に入力される前処理を行う代わりとして、目標検出部32において目標を検出する際に、地図データを用いて地図データから陸等の固定物を除去する処理を行うようにしてもよい。尚、このように目標検出部32によって1スキャン分のデータから全ての目標を自動的に抽出することができるので、ユーザが追尾目標を特定する必要はない。また、目標を検出する際に、AISデータを用いて、追尾する必要のない既知の目標を除去する処理を行うようにしてもよい。
【0034】
目標検出部32で検出された1つ以上の目標位置は、目標位置テーブル34に格納される。目標位置テーブル34には、少なくとも最新の2スキャン分の目標位置が格納される。
【0035】
目標位置マッチング処理部36は、目標位置テーブル34で格納された2スキャン分の目標位置を用いてマッチングを行う。具体的には、2スキャン間の目標位置に対して全ての目標の移動距離の和が最小になるようにマッチングを行う。または、和が最小となるような近似マッチング解を求めて、そのマッチングを行う。即ち、現スキャン(t)の目標iの位置を(xi,t,yi,t)とし、その前のスキャンの目標位置を(xi,t-1,yi,t-1)としたときに、その位置の差diの全目標の総和
【0036】
【数1】

が最小となるような組み合わせ(xit,yit)と(xi,t-1,yi,t-1)を見つけて、同じ目標にその位置情報を割り当てる。尚、3次元の場合でも同様に3次元に拡張すればよい。具体的な最小となるような組み合わせを近似的に見つけるマッチングアルゴリズム例については、後述する。
【0037】
こうして、組み合わせを検出して対応付けると、マッチングデータテーブル40において、目標を識別する目標識別データ及び時間に相当するそのスキャンタイミングと関連付けてその位置が格納される。ここで、目標識別データとしては、ある目標の履歴を他の目標の履歴と識別することができるものであれば、何でもよい。
【0038】
目標情報処理ブロック16は、マッチングデータテーブル40で格納された目標の位置データから対象目標の針路・速力を計算する目標情報計算部(平滑部)42と、その計算結果を格納する目標追尾情報テーブル44と、目標データ検索部46と、を有する。
【0039】
目標情報計算部42で行う針路・速力計算は、α−βフィルタ等を用いて計算することができる。
【0040】
画面表示部18には、前記目標追尾情報テーブル44に格納された情報から目標が表示される。ユーザインターフェース部20から、画面表示部18に対して所望の目標が指定される、あるいは、予め指定された領域内に目標が侵入する、あるいは、目標情報処理ブロック16により自動判断されることによって、目標データ検索部46は、その目標について目標追尾情報テーブル44で格納された情報、つまり針路・速力の情報を検索し、その情報を画面表示部18に送ることで、画面表示部18にその情報が表示される。
【0041】
(第2実施形態)
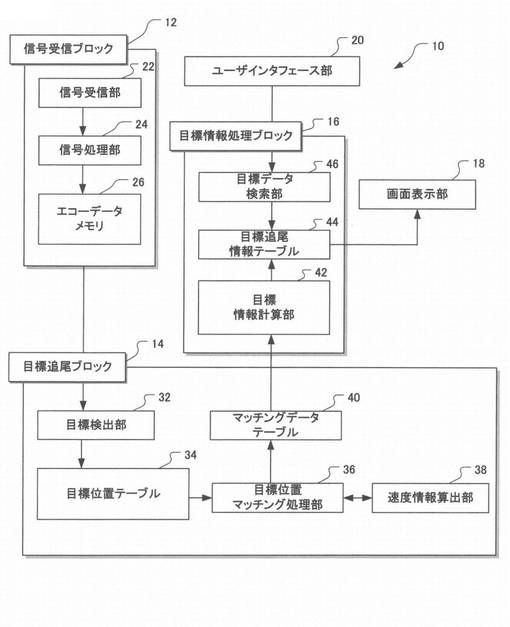
図2は、本発明による目標追尾方法に従った目標追尾装置10の第2実施形態のブロック図を表している。この第2実施形態は、第1実施形態と大部分が同じであるため、異なる部分のみ説明する。
【0042】
即ち、この実施形態では、目標追尾ブロック14が、速度情報算出部38を更に備えている。
【0043】
速度情報算出部38は、マッチングデータテーブル40の情報を用いて、各目標の速度(速力と針路)を算出する。即ち、速度は、過去の2つ以上のスキャンに亘る目標の位置を用いて求めることができる。必要に応じてα−βフィルタ等を用いてもよく、または、目標が一定の速度を維持するものとして、過去の2つのスキャンにおける目標の位置の差から単純に速度を求めてもよい。算出された速度は、目標識別データと関連付けてマッチングデータテーブル40に格納される。
【0044】
このように速度情報算出部38を設けた目標位置マッチング処理部36は、2スキャン間の目標位置に対して全ての目標の移動距離の和が最小になるようにマッチングを行う代わりに、現スキャン(t)の各目標iの位置(xit,yit)と、速度情報算出部38で算出した速度を用いた現スキャン(t)における各目標の予測位置(xit^,y^it)との距離の総和が最小になるようにマッチングを行う。この場合、各目標iの位置(xit,yit)と各目標の予測位置(xsit^,y^it)との位置の差di^は小さいと予測できるので、マッチングの精度を上げることができる。
【0045】
以上のように第1及び第2実施形態による目標追尾装置においては、ウィンドウを設定せずに、その代わりに、全目標を対象として、過去の目標位置または予測目標位置と、現目標位置との間でのマッチングを行うようにしている。これに対して、従来は、個々の目標に対してそれぞれウィンドウを設定することで、個々の目標に対してそれぞれ独立的に追尾を行っている。そのため、1つのウィンドウ内に複数の目標が存在する場合もあり、またはウィンドウから目標エコーが外れてしまう場合もある。
【0046】
しかしながら、本発明では、全ての目標を対象として追尾を行い、その移動量の和が最小となるように対応付けを行うので、ウィンドウ内といった局所的な情報だけでは得られなかった周辺の目標の運動を考慮した目標追尾が可能となり、正確な追尾が可能となる。これによって輻輳地域においても、乗り移りを抑制した正確な追尾が可能となる。また、追尾中の目標が急速な加減速や旋回を行った場合でも、全体として最適な組み合わせを求めるので、ロストを抑制した正確な追尾が可能となる。つまり、ある注目する目標が急速な加減速や旋回を行っても、周りの目標の追尾が継続できていれば、その注目した目標を容易に見つけることができる。
【0047】
また、複数のスキャン間にまたがる信号を使用するために、信号処理部24でスキャン相関処理を行うことで、ノイズ除去を行うことも可能になる。
【0048】
尚、以上の第1及び第2実施形態では、1つのスキャン全体をマッチング対象としたが、これに限るものではなく、1つのスキャンを複数の領域に分けて、それぞれの領域においてマッチングを行うようにしてもよい。
【0049】
(第3実施形態)
図3は、本発明による目標追尾方法に従った目標追尾装置10の第3実施形態のブロック図を表している。第1または2実施形態の同一・同様の部材は同一の符号を付して、その詳細説明を省略する。
【0050】
この実施形態では、ウィンドウを設定する方法とマッチングとを組み合わせて、追尾の精度を向上させるものである。
【0051】
即ち、目標追尾装置10は、大別して、信号受信ブロック52、目標追尾ブロック54、目標情報処理ブロック56、画面表示部18、ユーザインターフェース部20、自動目標捕捉部62及び補助追尾ブロック64を有している。
【0052】
信号受信ブロック52は、信号受信ブロック12と同様であり、外部からの目標エコー信号または目標信号が入力され、信号受信部22と、信号処理部24と、1スイープ分のエコーデータを格納するスイープデータメモリ66とを有する。
【0053】
目標追尾ブロック54は、スイープデータ抽出部70と、追尾ウィンドウメモリ72と、目標抽出部74と、目標位置算出部76と、目標位置テーブル78と、速度情報算出部80と、ウィンドウ予測位置計算部82と、ウィンドウ位置テーブル84と、ウィンドウ初期位置計算部86と、を有する。
【0054】
スイープデータ抽出部70は、後述のウィンドウ位置テーブル84に従い、スイープデータメモリ66からウィンドウ位置にあるエコーデータを抜き出し、追尾ウィンドウメモリ72に格納する。
【0055】
追尾ウィンドウメモリ72に1つのウィンドウ分のデータの保存が完了すると、目標抽出部74は、追尾ウィンドウメモリ72に保存されたウィンドウ内の目標の抽出を行い、目標位置算出部76で抽出した目標の位置を求める。目標抽出部74は、必要に応じて後述の補助追尾ブロック64で求めた目標を使用する。
【0056】
求めた目標位置は、目標識別データ及び時間に相当するスキャンタイミングと関連付けて目標位置テーブル78に格納される。速度情報算出部80は、目標位置テーブル78で格納された目標位置及び前回の目標位置から目標速度を求める。ウィンドウ予測位置計算部82は、求めた目標位置及び速度情報算出部80で求めた目標速度を用いて、次回の目標の予測位置を求め、さらにその予測位置を中心とするウィンドウを求める。また、ウィンドウ初期位置計算部86は、初期捕捉時に、今回の目標位置を中心として、大きさの大きいウィンドウを求める。求めたウィンドウは、ウィンドウ位置テーブル84に目標識別データと関連付けて格納される。
【0057】
目標情報処理ブロック56は、目標位置テーブル78で格納された目標の位置データから対象目標の針路・速力を計算する目標情報計算部42と、その計算結果を格納する目標追尾情報テーブル44と、を有する。
【0058】
追尾するべき目標の捕捉は、ユーザインターフェース部20からユーザによって指定されるか、または自動目標捕捉部62によってスイープデータメモリ66からのエコーデータから、所定の条件を満足する目標が指定されることによって、行われる。
【0059】
次に、補助追尾ブロック64は、信号処理部24からのエコーデータを、1スキャン毎に更新して1または複数スキャン分を格納するエコーデータメモリ90と、目標検出部32と、目標位置テーブル34と、目標位置マッチング処理部36と、必要に応じて速度情報算出部38と、マッチングデータテーブル40と、を有する。
【0060】
補助追尾ブロック64は、原則的に、第1実施形態または第2実施形態の目標追尾ブロック14と同じであり、2スキャン分の目標位置のマッチングを行うか、または、現スキャンの各目標の位置と各目標の予測位置とのマッチングを行い、マッチングデータテーブル40には、その目標識別データと目標位置とが格納される。
【0061】
前記目標抽出部74は、各目標識別データに対応して設定されたウィンドウ内で抽出された目標が1つであれば、そのまま抽出した目標の位置を目標識別データに対応するものとして求めればよい。しかしながら、所定の条件を満足する場合に、補助追尾ブロック64のマッチングデータテーブル40を参照して、目標の抽出を行うことができる。
【0062】
所定の条件を満足する場合とは、例えば、ウィンドウ内に目標が2つ以上抽出された場合、またはウィンドウ内に目標が1つも抽出されない場合とすることができる。この場合に、補助追尾ブロック64のマッチングデータテーブル40において、マッチングされたデータを用いて問題とする目標識別データに対応する目標の位置を検出することができ、これによって、目標の乗り移りやロストを抑制することができる。
【0063】
補助追尾ブロック64は、目標追尾ブロック54と独立的に演算処理を行うことができる。ここで、各ブロックにおいて、目標を識別するものとして使用される目標識別データは、共通としてもよく、または別個のものとしてもよい。別個のものとする場合には、互いの目標識別データの対応付けを、その他の情報、例えば、過去のスキャン時の目標位置の一致などから求めることができる。
【0064】
そして、補助追尾ブロック64は、常に、全ての目標に対してマッチングを行ってもよい。または、補助追尾ブロック64の目標位置マッチング処理部36によるマッチング処理は、限定された範囲でのマッチングを行うようにしてもよい。限定された範囲とは、前記目標抽出部74において、前記所定の条件となる任意の目標のウィンドウ内に2つ以上の目標が抽出された場合、または該ウィンドウ内に全く目標が抽出されない場合に、そのウィンドウを含み該ウィンドウよりやや広めの領域に対してマッチングを行うようにしてもよい。また、マッチングを行う際に、前のスキャンの目標位置または、目標の速度を、目標位置テーブル78から取得してもよい。
【0065】
この実施形態によれば、ウィンドウを用いた追尾を用いることで、処理を簡素化すると共に、ウィンドウを用いた場合の欠点である乗り移り、ロストという問題が発生したときに、補助追尾ブロックによるマッチング結果を用いて目標を特定することで、ウィンドウを用いた場合の欠点を補うことができる。補助追尾ブロックにおいて、乗り移りやロストが発生している領域においてマッチング処理を行うようにすることで、処理負荷を低減させることもできる。
【0066】
この実施形態では、目標抽出部74でウィンドウ内の目標抽出を行う際にウィンドウ毎に抽出条件を変更することができ、目標の抽出をより確実にすることができる。例えば、大きな目標の影となってしまう領域においては、その信号は低くなるので、その場合には、該当するウィンドウにおける目標抽出の閾値を低く設定するなどのフレキシビリティを持たせることができる。
【0067】
(マッチング処理の具体例)
次に、マッチング処理の具体例について以下に説明する。
ここで、マッチングは、ある時刻(タイミング)t1にn個の点群が存在し、時刻(タイミング)t2(t2≠t1)にn±α個の点群が存在するときに、時刻t1の点とt2の点で、最も確からしい点を対応付けることである。
【0068】
各点が情報として位置情報しか持たない場合には、マッチングの要素として持つのは、各点間の距離情報だけとなる。このとき、最も確からしいと思われるマッチングの解の一つは、対応付けられた点同士の距離dの総和(式(1)参照)が最小となる場合であると考えられる。
【0069】
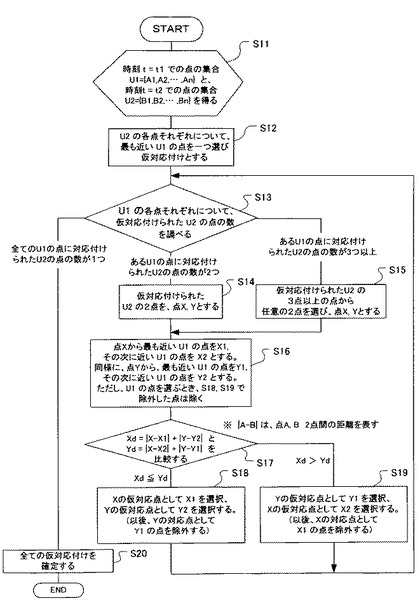
全ての組み合わせを計算して、総和が最小となる組み合わせを求めることも考えられるが、計算量が膨大となる欠点がある。そこで、この計算量を低減するアルゴリズムとして図4に示す次の例を提案する。
【0070】
(1) 時刻t=t1での点の集合U1={A1,A2,・・・,An}と、時刻t=t2での点の集合U2={B1,B2,・・・,Bn}を得る(ステップS11)。
(2) U2の各点それぞれについて、最も近いU1の点を一つ選びそれを仮対応付けとする(ステップS12)。
(3) U1の各点それぞれについて仮対応付けられたU2の点の数を調べる(ステップS13)。
(4) あるU1の点に対応付けられたU2の点が2つのときには、仮対応付けられたU2の2点を便宜上X、Yと称する(ステップS14)。また、あるU1の点に対応付けられたU2の点が3つ以上のときには、3点以上の点から任意の2点を選び便宜上X、Yと称する(ステップS15)。一方、U1の点に対応付けられたU2の点が1つである場合には、全ての仮対応付けを確定して、マッチングを終了する(ステップS20)。
(5) 仮対応付けられたU2の2点X、Yに対して、点Xから最も近いU1の点をX1、その次に近いU1の点をX2とする。同様に、点Yから最も近いU1の点をY1、その次に近いU1の点をY2とする。ここで、X1とY1は同じ点である。尚、U1の点を選ぶときに、後述のステップS18、19で除外した点は除くものとする(ステップS16)。
(6) Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|の大小を比較する(ステップS17)。ここで|A−B|は、点A、B2点間の距離を表す。
(7) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択する。以降は、Yの対応点としてY1の点は除外する(ステップS18)。
(8) Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する。以降は、Xの対応点としてX1の点は除外する(ステップS19)。
(9) ステップS13〜ステップS19を、全てのU1の点に対応付けられたU2の点の数が1つとなるまで、繰り返す。
【0071】
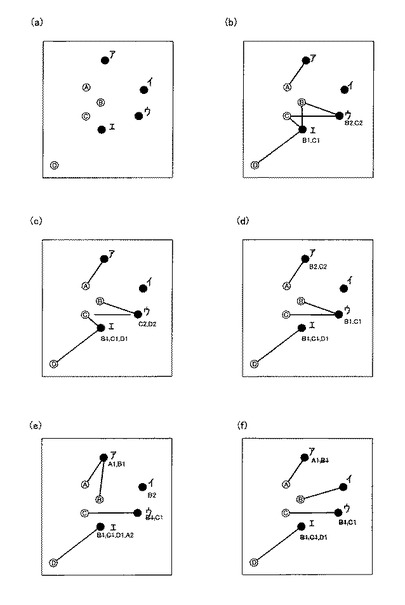
(1)〜(9)のアルゴリズムに従った具体的処理例を図5に基づき説明する。
図5(a)において、時刻t2の白抜き点○A〜Dを、時刻t1の黒丸点●ア〜エにマッチングすることを考えると、まず、白抜き点○A〜Dを、最も距離の近い時刻t1の黒丸点●に仮対応付ける。●エに対して、○B、○C、○Dの3点が仮対応付けられるので、その中から任意の点として、○Bと○Cとを選択する。
【0072】
そして、|B−B1|+|C−C2|と|B−B2|+|C−C1|との距離を比較する。後者の方が短いので、B2(●ウ)とC1(●エ)とを○B、○Cに仮対応付ける(図5(b))。ここで、○Bは●エの対応付けの候補としては落選したことになり、以降、●エは○Bの対応点としては除外される。
【0073】
依然として、●エに対して○Cと○Dとが仮対応付けされているので、|C−C1|+|D−D2|と|C−C2|+|D−D1|との距離を比較する。後者の方が短いので、C2(●ウ)とD1(●エ)とを○Cと○Dに仮対応付ける(図5(c))。ここで、○Cは●エの対応付けの候補としては落選したことになり、以降、●エは○Cの対応点としては除外される。
【0074】
すると、図5(d)に示すように、●ウに対して、○B、○Cの2点が仮対応付けられるので、|B−B1|+|C−C2|と|B−B2|+|C−C1|との距離を比較する。ここで、最も近い点である●エは、前述のように対応点としては除外されている。後者の方が短いので、B2(●ア)とC1(●ウ)とを○B、○Cに仮対応付ける。以降、●ウは○Bの対応点としては除外される。
【0075】
すると、図5(e)に示すように、●アに対して、○A、○Bの2点が仮対応付けられるので、|A−A1|+|B−B2|と|A−A2|+|B−B1|との距離を比較する。ここで、○Bについては、●エ、●ウは、前述のように対応点としては除外されている。前者の方が近いので、A1(●ア)とB2(●イ)とを○A、○Bに仮対応付ける。
【0076】
こうして、複数対応付けられた黒丸点●がなくなったので、仮対応付けを確定し、処理を終了する。
【0077】
以上のアルゴリズムで少ない計算量でマッチングを行うことができる。
【0078】
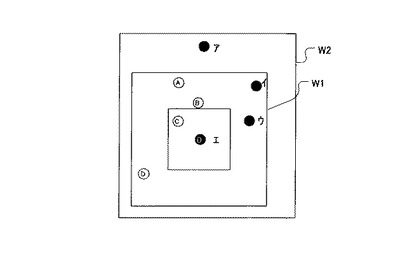
図5で示した例の場合に、仮にウィンドウを設定して追尾を行ったとすると、初期捕捉時に、黒丸点●エを中心にウィンドウを設定した場合、図6に示すウィンドウW1ではウィンドウサイズが小さ過ぎるために、マッチングされた○Dが入らず、間違った追尾がなされてしまう。反対に、図6に示すウィンドウW2ではウィンドウサイズが大き過ぎるために、○A、○B、○C、○Dが全て入ってしまい、通常は中心部に近い○Cが選択されてしまい、同様に間違った追尾がなされてしまう。マッチングによって、このような不具合を一掃することができ、正しい追尾を行うことができる。
【0079】
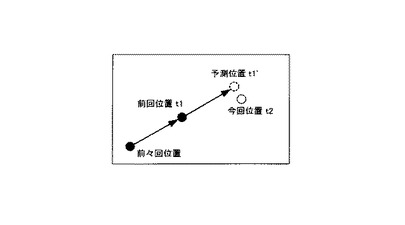
以上の図4〜図5は、前回のスキャン時と今回のスキャン時における目標のマッチングを行う例であったが、今回のスキャン時の目標位置と目標の予測位置とのマッチングを行う場合は、例えば、図7に示すように、前々回のスキャン時の目標位置と前回のスキャン時の目標位置と、その速度が一定であることを前提として、予測位置t1’を求めることができる。そして、予測位置と今回のスキャン時の目標位置との間でのマッチングについては、図4〜図5に示したアルゴリズムと同じ手法により(図5において●または○のいずれか一方を目標の予測位置、いずれか他方を今回のスキャン時の目標の位置とする)、計算量が少なく、且つより精度の高いマッチングを行うことができる。
【0080】
以上の説明においては、前回のスキャン時と今回のスキャン時の目標数が一定であることを前提として行ったが、実際には、目標数が増減する。よって、そのような場合に備えて、マッチングする範囲を予め決めておき、その範囲内でなければマッチングを行わないように制約条件を付加することで、対応付けができない点を許すようにしてもよい。
【0081】
具体的には、図4のアルゴリズムのステップS12の仮対応付けにおいて、「最も近いU1の点が所定距離d以上である場合には、仮対応付けしない」という条件を加え、ステップS18及びS19において、YとY2、XとX2との距離が所定距離d以上である場合には、仮対応付けしない」という条件を加え、ステップS20の仮対応付けを確定する条件としては、全てのU1の点に対応付けられたU2の点の数が1つ以下とすることができる。
【0082】
これによって、明らかに離れた点同士が対応付けされてしまうことを防ぐことができ、時刻t1とt2との数が同数でない場合でも確からしい対応付けを行うことができる。
【0083】
目標数の増減の原因としては、次のような場合が考えられる。
・目標数が増加する場合
(1) 目標が処理範囲の外から進入してきた場合
(2) ノイズやクラッタを目標と誤検出した場合
(3) 目標エコー信号が不安定となり、1つの目標が2つに見えてしまう場合
このような場合、マッチングされなかった新しい位置を、新規目標の位置として、追尾を開始するようにすればよい。ノイズの位置はランダムに近いので、ノイズが新規に捕捉されてしまっても、通常は数スキャンの間に追尾不可能になるはずである。同様に、1つの目標が一時的に2つに見えてしまった場合でも、片方は追尾が継続され、もう片方はロストとなる。しかしながら、追尾中の目標がノイズとマッチングしてしまうと、次回のスキャン時にロストになる可能性がある。
【0084】
このようにノイズとマッチングすることを防ぐために、マッチングの条件として、移動距離を条件とするだけでなく、エコーサイズの大きさを条件とすることができる。即ち、現スキャン(t)の目標iの位置を(xi,t,yi,t)、エコーの大きさをsi,tとし、その前のスキャンの目標位置を(xi,t-1,yi,t-1)、エコーの大きさsi,t-1としたときに、その位置の差di及びサイズの差Δsiとを乗算し、その全目標の総和
【0085】
【数2】
が最小となるようなマッチングを行うようにしてもよい。目標位置が3次元である場合も同様に3次元に拡張すればよい。
【0086】
・目標数が減少する場合
(1) 大きな目標の影に隠れ、エコーが弱くなり、検出ができなくなった場合
(2) 他のエコーと一体化してしまった場合
(3) 目標が処理範囲の外へ出た場合
このような場合、マッチングされなかった前の目標を追尾不可能(ロスト)として扱えばよい。
【0087】
但し、そのように扱うと、(1)、(2)の原因でも目標が検出できなかった場合にすぐにロストになってしまうので、一時的に検出できなかった場合、即ちマッチングできなかった場合であっても、数スキャンの間、仮追尾を行うことが考えられる。仮追尾は、図7に示すような予測位置を求めることで行うことができる。そうすることで、目標エコーが復帰したときに、継続して追尾を行うことができる。
【0088】
また、以上の制約条件を一定に定める他に、マッチングを行う範囲を、追尾状態や船舶情報を用いて動的に変化させることも考えられる。例えば、初期捕捉時に速度情報が得られないときには、マッチング範囲を広くし(所定距離dを大きくする)、速度情報が得られた後は、マッチング範囲を狭く(所定距離dを小さくする)することが考えられる。または、速力が大きな目標は高速船であり高速旋回を行う可能性があるとして、マッチング範囲を広くしてもよい。または、エコーサイズが大きな目標は大型船であり高速旋回を行う可能性は低いとしてマッチング範囲を狭くしてもよい。
【符号の説明】
【0089】
10 目標追尾装置
26 エコーデータメモリ(データメモリ)
36 目標位置マッチング処理部(マッチング処理手段)
38 速度情報算出部(速度情報算出手段)
40 マッチングデータテーブル
74 目標抽出部(目標抽出手段)
82 ウィンドウ予測位置計算部(ウィンドウ計算手段)
86 ウィンドウ初期位置計算部(ウィンドウ計算手段)
【技術分野】
【0001】
本発明は、船舶等の目標の追尾を行う目標追尾装置及び目標追尾方法に関する。
【背景技術】
【0002】
例えば、船舶等の衝突予防を行うARPA装置(Automatic Radar Plotting Aids)では、目標の追尾を行う目標追尾装置が設けられる。目標追尾装置では、レーダエコーの或るスキャンにおいて追尾している目標に対して、次のスキャンにおいて、その目標の周辺または過去の位置から算出したその目標の予測位置の周辺にウィンドウ(またはゲートともいう)を作成し、ウィンドウの中の目標の重心位置を求めて、それを目標の新しい位置として、順次、これを繰り返すことで、目標の追尾を行っている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3110549号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のウィンドウを設定する追尾においては次のような問題がある。
1)1つのウィンドウ内で1つの目標の追尾を行うことが原則となっているために、1つのウィンドウ内に複数のエコーが発生した場合には、そのウィンドウの中から目標のエコーを選択する必要がある。そのため、間違ったエコーを選択すると、乗り移りが発生する。特に、目標が輻輳している地帯では、1つのウィンドウ内に複数のエコーが発生することが頻繁に起こり、誤った選択がなされる可能性が高くなる。
2)追尾中の目標が急速な加減速や旋回を行った場合、ウィンドウからエコーが外れてしまう場合がある。一度ウィンドウからエコーが外れてしまうと、追尾を継続するのは非常に困難であり、目標を見失う(ロストする)結果となる。
【0005】
ウィンドウの大きさが小さいとロストの可能性があり、逆に大きければ乗り移りの可能性があり、上記1)と2)の問題はトレードオフの関係にある。特に、近年船舶等の目標の高速化により、ウィンドウを大きくとる必要があり、そのため、乗り移りの可能性が高まっている。
【0006】
本発明はかかる課題に鑑みなされたもので、その目的は、従来のウィンドウを用いた追尾の問題を解消することができる目標追尾装置及び目標追尾方法を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の請求項1記載の発明は、時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾装置において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理手段と、
マッチング処理手段で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納するマッチングデータテーブルと、
を備えることを特徴とする。
【0008】
請求項2記載の発明は、請求項1記載のものにおいて、過去の2つ以上のタイミングで取得され同じ目標識別データと関連付けられた目標位置に基づき該目標識別データに対応する目標速度を求める速度情報算出手段をさらに備え、
前記マッチング処理手段は、前記目標速度に基づきあるタイミングにおける目標予測位置を求めて、該目標予測位置とあるタイミングで取得された前記目標位置との対応付けを行うことを特徴とする。
【0009】
請求項3記載の発明は、請求項1または2記載の前記マッチング処理手段が、複数の目標位置と複数の被マッチング目標位置に対してその距離の総和が最小となるような対応付けを行うことを特徴とする。
【0010】
請求項4記載の発明は、請求項1または2記載の前記マッチング処理手段が、複数の目標位置と複数の被マッチング目標位置に対してその距離及び目標の大きさの差異の乗算の総和が最小となるような対応付けを行うことを特徴とする。
【0011】
請求項5記載の発明は、請求項3または4記載の前記マッチング処理手段が、目標位置と被マッチング目標位置との距離が所定距離を超えている場合には、該目標位置と該被マッチング目標位置との対応付けは行わないことを特徴とする請求項3または4記載の目標追尾装置。
【0012】
請求項6記載の発明は、請求項5記載の前記所定距離は、前記目標信号より得られる目標の大きさに応じて変化させることを特徴とする。
【0013】
請求項7記載の発明は、請求項5記載の前記所定距離は、目標速度の大きさに応じて変化させることを特徴とする。
【0014】
請求項8記載の発明は、請求項1ないし7のいずれか1項に記載のものにおいて、過去のタイミングで取得された目標位置または過去のタイミングで取得された目標位置及び過去の2つ以上のタイミングで取得された目標位置に基づき求めた目標速度から目標の予測位置を求めて、該予測位置を中心としたウィンドウを追尾対象の目標毎に計算するウィンドウ計算手段と、
ウィンドウ計算手段で計算されたウィンドウ内にあるデータから目標を抽出する目標抽出手段と、
を備え、前記目標抽出手段は、ウィンドウ内に目標とするべきデータが2つ以上存在するとき、またはウィンドウ内に目標とするべきデータが存在しないときに、前記マッチングデータテーブルを参照して、追尾対象の目標の目標識別データに関連付けられた目標位置を抽出することを特徴とする。
【0015】
請求項9記載の発明は、請求項1ないし8のいずれか1項に記載の前記マッチング処理手段が、
複数の目標位置と複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける仮対応付け手段と、
複数の第1目標位置が仮対応付けられた第2目標位置に対して、一つの第1目標位置を仮対応付けて、別の第1目標位置を別の第2目標位置に仮対応付ける仮対応付け選択手段と、
全ての第2目標位置に1以下の第1目標位置が仮対応付けられたときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する確定手段と、
を備えることを特徴とする。
【0016】
請求項10記載の発明は、請求項9記載の前記仮対応付け選択手段が、
同じ第2目標位置に対して仮対応付けられた2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する手段と、
Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する手段と、
を備えることを特徴とする。
【0017】
請求項11記載の発明は、時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾方法において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理工程と、
マッチング処理工程で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する工程と、
を備えることを特徴とする。
【0018】
請求項12記載の発明は、請求項11記載の方法において、
前記マッチング処理工程が、
(a) 対象となる複数の目標位置と対象となる複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける工程と、
(b) 第2目標位置に仮対応付けられた第1目標位置の数を求める工程と、
(c) 同じ第2目標位置に仮対応付けられた第1目標位置の数が2以上である場合には、その数が2つである場合に、その2つの第1目標位置X、Yを選択し、その数が3以上である場合に、任意の2つの第1目標位置X、Yを選択する工程と、
(d) 2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する工程と、
(e) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する工程と、
(f) (b)、(d)、(e)の工程を、全ての第2目標位置に1以下の第1目標位置が仮対応付けられるまで繰り返す工程と、
(g) 全ての第2目標位置に仮対応付けられた第1目標位置の数が1以下となったときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する工程と、
を備えることを特徴とする。
【発明の効果】
【0019】
本発明によれば、1つの目標にのみ着目してウィンドウを設定する従来と異なり、複数の目標位置と複数の被マッチング目標位置との対応付けを行うので、ウィンドウ内といった局所的な情報だけでは得られなかった周辺の目標の運動を考慮した目標追尾が可能となり、正確な追尾が可能となる。また、ウィンドウを設定する手段と組み合わせて精度を上げることも可能である。
【0020】
これによって輻輳地域においても、乗り移りを抑制した正確な追尾が可能となる。また、追尾中の目標が急速な加減速や旋回を行った場合でも、全体として最適な組み合わせを求めるので、ロストを抑制した正確な追尾が可能となる。つまり、ある注目する目標が急速な加減速や旋回を行っても、周りの目標の追尾が継続できていれば、その注目した目標を容易に見つけることができるようになる。
【図面の簡単な説明】
【0021】
【図1】本発明による目標追尾方法に従った目標追尾装置の第1実施形態のブロック図である。
【図2】本発明による目標追尾方法に従った目標追尾装置の第2実施形態のブロック図である。
【図3】本発明による目標追尾方法に従った目標追尾装置の第3実施形態のブロック図である。
【図4】マッチング処理の具体的なアルゴリズムを表すフローチャートである。
【図5】図4によるマッチング処理の具体例である。
【図6】図5の例において、従来のウィンドウ方式との違いを説明する説明図である。
【図7】目標の予測位置を求めるための一例を表す説明図である。
【図8】目標の位置を求めるための様々な例を表す説明図である。
【発明を実施するための形態】
【0022】
以下、図面を用いて本発明の実施の形態を説明する。
【0023】
(第1実施形態)
図1は、本発明による目標追尾方法に従った目標追尾装置10の第1実施形態のブロック図を表している。この例の目標追尾装置10は、ARPA装置に搭載されたものとしている。しかしながら、目標追尾装置10は、周囲の海上または空中の船舶または飛行体といった目標を監視するために移動体自体に搭載する他に、海上または空中の船舶または飛行体といった目標を監視するために地上等に定置することができる。
【0024】
図示したように、目標追尾装置10は、大別して、信号受信ブロック12、目標追尾ブロック14、目標情報処理ブロック16、画面表示部18及びユーザインターフェース部20と、を有している。
【0025】
信号受信ブロック12には、外部から目標エコー信号または目標信号が入力される。信号受信ブロック12に入力される信号としては、目標位置検出手段であるレーダ装置から出力されたビデオ信号とすることができる。この場合、レーダアンテナが1つのパルスを送信し、それに対する反射波を受信するときの、その期間を1スイープと呼び、レーダアンテナが1回転する期間を1スキャンと呼ぶ。各パルスの真方位は、レーダアンテナから得られる方位(相対方位)に、ジャイロ等で得られるレーダアンテナのヘディング方位を加えることで求められる。
【0026】
そして、信号受信ブロック12は、入力されたビデオ信号を検波する信号受信部22と、ビデオ信号に対してノイズ除去などの各種信号処理を行う信号処理部24と、1スキャン毎に更新して1または複数スキャン分のエコーデータを格納するエコーデータメモリ26を有する。
【0027】
ここで、信号処理部24は、エコーデータメモリ26に格納する前処理として、複数スキャン分のエコーデータを格納することで、スキャン相関処理を行ってノイズ等を除去することも可能である。
【0028】
尚、信号受信ブロック12は、目標追尾装置10が直接接続された目標位置検出手段であるレーダ装置からの信号を受信する他、目標追尾装置10とは異なる移動体または目標追尾装置10とは離れた地上に設置された目標位置検出手段であるレーダ装置からの信号を何らかの手段で受信してもよい。スレーブレーダ装置からの信号を直接に受信してもよく、また、レーザ装置またはその他の任意の目標位置検出手段から得られた信号をデジタルデータで受信してもよく、または、デジタルデータを任意の通信ネットワークを介して受信してもよい。いずれにしても、目標位置検出手段に対してある領域に着目したときに、その領域内に存在する目標を表す目標信号が時系列的に取得されて、その目標信号が信号受信ブロック12に入力されればよい。また、信号受信ブロック12に入力される前処理として、目標位置検出手段からの目標信号に対して、地図データを用いて地図データに基づき陸等の固定物を除去する処理を行った後に、信号受信ブロック12に目標信号を入力するようにしてもよい。また、目標を検出する前に、AISデータを用いて、追尾する必要のない既知の目標を除去する処理を行うようにしてもよい。
【0029】
目標追尾ブロック14は、目標検出部32と、目標位置テーブル34と、目標位置マッチング処理部36と、マッチングデータテーブル40と、を有する。
【0030】
目標検出部32は、エコーデータメモリ26に格納された1スキャン分のデータから目標の位置を検出する。そのためにまず、目標エコーを抽出する。その抽出する方法としては、次の方法が考えられる。
【0031】
(1)デジタルデータをある閾値を用いて二値化した後、距離方向、及び方位方向にある一定以上の連続性のある部分を検出して目標エコーとするか、または、ラベリングなどの画像処理手法によってエコーの塊の分離を行い、ある一定サイズ以上の塊を目標エコーとする。
(2)デジタルデータの値の2次元的な傾きを求め、極大となっている部分を目標位置とする。または、デジタルデータの値の変化量(傾き)が一定以上の部分を、目標エコーの境界として検出する。
(3)アナログ信号からそのまま目標を検出する方法として、スプリットゲート方式(吉田孝「改訂レーダ技術」、p.264、電子情報通信学会(1996))を用い、アナログ信号を進みゲートと遅れゲートを通過させ、信号の中央部で両ゲートの差分が0となることを利用して目標エコーを検出する。
【0032】
また、検出した目標エコーから目標位置を決定するには、次の方法が考えられる(図8参照)。
(1)目標エコーの塊の重心位置を目標位置とする(図8(a))。
(2)目標エコーの距離方向及び方位方向の中心位置を目標位置とする(図8(b))。
(3)目標エコーの方位方向の中心位置、かつ距離方向の最もアンテナに近い位置を目標位置とする(図8(c))。
【0033】
また、信号受信ブロック12に入力される前処理を行う代わりとして、目標検出部32において目標を検出する際に、地図データを用いて地図データから陸等の固定物を除去する処理を行うようにしてもよい。尚、このように目標検出部32によって1スキャン分のデータから全ての目標を自動的に抽出することができるので、ユーザが追尾目標を特定する必要はない。また、目標を検出する際に、AISデータを用いて、追尾する必要のない既知の目標を除去する処理を行うようにしてもよい。
【0034】
目標検出部32で検出された1つ以上の目標位置は、目標位置テーブル34に格納される。目標位置テーブル34には、少なくとも最新の2スキャン分の目標位置が格納される。
【0035】
目標位置マッチング処理部36は、目標位置テーブル34で格納された2スキャン分の目標位置を用いてマッチングを行う。具体的には、2スキャン間の目標位置に対して全ての目標の移動距離の和が最小になるようにマッチングを行う。または、和が最小となるような近似マッチング解を求めて、そのマッチングを行う。即ち、現スキャン(t)の目標iの位置を(xi,t,yi,t)とし、その前のスキャンの目標位置を(xi,t-1,yi,t-1)としたときに、その位置の差diの全目標の総和
【0036】
【数1】
が最小となるような組み合わせ(xit,yit)と(xi,t-1,yi,t-1)を見つけて、同じ目標にその位置情報を割り当てる。尚、3次元の場合でも同様に3次元に拡張すればよい。具体的な最小となるような組み合わせを近似的に見つけるマッチングアルゴリズム例については、後述する。
【0037】
こうして、組み合わせを検出して対応付けると、マッチングデータテーブル40において、目標を識別する目標識別データ及び時間に相当するそのスキャンタイミングと関連付けてその位置が格納される。ここで、目標識別データとしては、ある目標の履歴を他の目標の履歴と識別することができるものであれば、何でもよい。
【0038】
目標情報処理ブロック16は、マッチングデータテーブル40で格納された目標の位置データから対象目標の針路・速力を計算する目標情報計算部(平滑部)42と、その計算結果を格納する目標追尾情報テーブル44と、目標データ検索部46と、を有する。
【0039】
目標情報計算部42で行う針路・速力計算は、α−βフィルタ等を用いて計算することができる。
【0040】
画面表示部18には、前記目標追尾情報テーブル44に格納された情報から目標が表示される。ユーザインターフェース部20から、画面表示部18に対して所望の目標が指定される、あるいは、予め指定された領域内に目標が侵入する、あるいは、目標情報処理ブロック16により自動判断されることによって、目標データ検索部46は、その目標について目標追尾情報テーブル44で格納された情報、つまり針路・速力の情報を検索し、その情報を画面表示部18に送ることで、画面表示部18にその情報が表示される。
【0041】
(第2実施形態)
図2は、本発明による目標追尾方法に従った目標追尾装置10の第2実施形態のブロック図を表している。この第2実施形態は、第1実施形態と大部分が同じであるため、異なる部分のみ説明する。
【0042】
即ち、この実施形態では、目標追尾ブロック14が、速度情報算出部38を更に備えている。
【0043】
速度情報算出部38は、マッチングデータテーブル40の情報を用いて、各目標の速度(速力と針路)を算出する。即ち、速度は、過去の2つ以上のスキャンに亘る目標の位置を用いて求めることができる。必要に応じてα−βフィルタ等を用いてもよく、または、目標が一定の速度を維持するものとして、過去の2つのスキャンにおける目標の位置の差から単純に速度を求めてもよい。算出された速度は、目標識別データと関連付けてマッチングデータテーブル40に格納される。
【0044】
このように速度情報算出部38を設けた目標位置マッチング処理部36は、2スキャン間の目標位置に対して全ての目標の移動距離の和が最小になるようにマッチングを行う代わりに、現スキャン(t)の各目標iの位置(xit,yit)と、速度情報算出部38で算出した速度を用いた現スキャン(t)における各目標の予測位置(xit^,y^it)との距離の総和が最小になるようにマッチングを行う。この場合、各目標iの位置(xit,yit)と各目標の予測位置(xsit^,y^it)との位置の差di^は小さいと予測できるので、マッチングの精度を上げることができる。
【0045】
以上のように第1及び第2実施形態による目標追尾装置においては、ウィンドウを設定せずに、その代わりに、全目標を対象として、過去の目標位置または予測目標位置と、現目標位置との間でのマッチングを行うようにしている。これに対して、従来は、個々の目標に対してそれぞれウィンドウを設定することで、個々の目標に対してそれぞれ独立的に追尾を行っている。そのため、1つのウィンドウ内に複数の目標が存在する場合もあり、またはウィンドウから目標エコーが外れてしまう場合もある。
【0046】
しかしながら、本発明では、全ての目標を対象として追尾を行い、その移動量の和が最小となるように対応付けを行うので、ウィンドウ内といった局所的な情報だけでは得られなかった周辺の目標の運動を考慮した目標追尾が可能となり、正確な追尾が可能となる。これによって輻輳地域においても、乗り移りを抑制した正確な追尾が可能となる。また、追尾中の目標が急速な加減速や旋回を行った場合でも、全体として最適な組み合わせを求めるので、ロストを抑制した正確な追尾が可能となる。つまり、ある注目する目標が急速な加減速や旋回を行っても、周りの目標の追尾が継続できていれば、その注目した目標を容易に見つけることができる。
【0047】
また、複数のスキャン間にまたがる信号を使用するために、信号処理部24でスキャン相関処理を行うことで、ノイズ除去を行うことも可能になる。
【0048】
尚、以上の第1及び第2実施形態では、1つのスキャン全体をマッチング対象としたが、これに限るものではなく、1つのスキャンを複数の領域に分けて、それぞれの領域においてマッチングを行うようにしてもよい。
【0049】
(第3実施形態)
図3は、本発明による目標追尾方法に従った目標追尾装置10の第3実施形態のブロック図を表している。第1または2実施形態の同一・同様の部材は同一の符号を付して、その詳細説明を省略する。
【0050】
この実施形態では、ウィンドウを設定する方法とマッチングとを組み合わせて、追尾の精度を向上させるものである。
【0051】
即ち、目標追尾装置10は、大別して、信号受信ブロック52、目標追尾ブロック54、目標情報処理ブロック56、画面表示部18、ユーザインターフェース部20、自動目標捕捉部62及び補助追尾ブロック64を有している。
【0052】
信号受信ブロック52は、信号受信ブロック12と同様であり、外部からの目標エコー信号または目標信号が入力され、信号受信部22と、信号処理部24と、1スイープ分のエコーデータを格納するスイープデータメモリ66とを有する。
【0053】
目標追尾ブロック54は、スイープデータ抽出部70と、追尾ウィンドウメモリ72と、目標抽出部74と、目標位置算出部76と、目標位置テーブル78と、速度情報算出部80と、ウィンドウ予測位置計算部82と、ウィンドウ位置テーブル84と、ウィンドウ初期位置計算部86と、を有する。
【0054】
スイープデータ抽出部70は、後述のウィンドウ位置テーブル84に従い、スイープデータメモリ66からウィンドウ位置にあるエコーデータを抜き出し、追尾ウィンドウメモリ72に格納する。
【0055】
追尾ウィンドウメモリ72に1つのウィンドウ分のデータの保存が完了すると、目標抽出部74は、追尾ウィンドウメモリ72に保存されたウィンドウ内の目標の抽出を行い、目標位置算出部76で抽出した目標の位置を求める。目標抽出部74は、必要に応じて後述の補助追尾ブロック64で求めた目標を使用する。
【0056】
求めた目標位置は、目標識別データ及び時間に相当するスキャンタイミングと関連付けて目標位置テーブル78に格納される。速度情報算出部80は、目標位置テーブル78で格納された目標位置及び前回の目標位置から目標速度を求める。ウィンドウ予測位置計算部82は、求めた目標位置及び速度情報算出部80で求めた目標速度を用いて、次回の目標の予測位置を求め、さらにその予測位置を中心とするウィンドウを求める。また、ウィンドウ初期位置計算部86は、初期捕捉時に、今回の目標位置を中心として、大きさの大きいウィンドウを求める。求めたウィンドウは、ウィンドウ位置テーブル84に目標識別データと関連付けて格納される。
【0057】
目標情報処理ブロック56は、目標位置テーブル78で格納された目標の位置データから対象目標の針路・速力を計算する目標情報計算部42と、その計算結果を格納する目標追尾情報テーブル44と、を有する。
【0058】
追尾するべき目標の捕捉は、ユーザインターフェース部20からユーザによって指定されるか、または自動目標捕捉部62によってスイープデータメモリ66からのエコーデータから、所定の条件を満足する目標が指定されることによって、行われる。
【0059】
次に、補助追尾ブロック64は、信号処理部24からのエコーデータを、1スキャン毎に更新して1または複数スキャン分を格納するエコーデータメモリ90と、目標検出部32と、目標位置テーブル34と、目標位置マッチング処理部36と、必要に応じて速度情報算出部38と、マッチングデータテーブル40と、を有する。
【0060】
補助追尾ブロック64は、原則的に、第1実施形態または第2実施形態の目標追尾ブロック14と同じであり、2スキャン分の目標位置のマッチングを行うか、または、現スキャンの各目標の位置と各目標の予測位置とのマッチングを行い、マッチングデータテーブル40には、その目標識別データと目標位置とが格納される。
【0061】
前記目標抽出部74は、各目標識別データに対応して設定されたウィンドウ内で抽出された目標が1つであれば、そのまま抽出した目標の位置を目標識別データに対応するものとして求めればよい。しかしながら、所定の条件を満足する場合に、補助追尾ブロック64のマッチングデータテーブル40を参照して、目標の抽出を行うことができる。
【0062】
所定の条件を満足する場合とは、例えば、ウィンドウ内に目標が2つ以上抽出された場合、またはウィンドウ内に目標が1つも抽出されない場合とすることができる。この場合に、補助追尾ブロック64のマッチングデータテーブル40において、マッチングされたデータを用いて問題とする目標識別データに対応する目標の位置を検出することができ、これによって、目標の乗り移りやロストを抑制することができる。
【0063】
補助追尾ブロック64は、目標追尾ブロック54と独立的に演算処理を行うことができる。ここで、各ブロックにおいて、目標を識別するものとして使用される目標識別データは、共通としてもよく、または別個のものとしてもよい。別個のものとする場合には、互いの目標識別データの対応付けを、その他の情報、例えば、過去のスキャン時の目標位置の一致などから求めることができる。
【0064】
そして、補助追尾ブロック64は、常に、全ての目標に対してマッチングを行ってもよい。または、補助追尾ブロック64の目標位置マッチング処理部36によるマッチング処理は、限定された範囲でのマッチングを行うようにしてもよい。限定された範囲とは、前記目標抽出部74において、前記所定の条件となる任意の目標のウィンドウ内に2つ以上の目標が抽出された場合、または該ウィンドウ内に全く目標が抽出されない場合に、そのウィンドウを含み該ウィンドウよりやや広めの領域に対してマッチングを行うようにしてもよい。また、マッチングを行う際に、前のスキャンの目標位置または、目標の速度を、目標位置テーブル78から取得してもよい。
【0065】
この実施形態によれば、ウィンドウを用いた追尾を用いることで、処理を簡素化すると共に、ウィンドウを用いた場合の欠点である乗り移り、ロストという問題が発生したときに、補助追尾ブロックによるマッチング結果を用いて目標を特定することで、ウィンドウを用いた場合の欠点を補うことができる。補助追尾ブロックにおいて、乗り移りやロストが発生している領域においてマッチング処理を行うようにすることで、処理負荷を低減させることもできる。
【0066】
この実施形態では、目標抽出部74でウィンドウ内の目標抽出を行う際にウィンドウ毎に抽出条件を変更することができ、目標の抽出をより確実にすることができる。例えば、大きな目標の影となってしまう領域においては、その信号は低くなるので、その場合には、該当するウィンドウにおける目標抽出の閾値を低く設定するなどのフレキシビリティを持たせることができる。
【0067】
(マッチング処理の具体例)
次に、マッチング処理の具体例について以下に説明する。
ここで、マッチングは、ある時刻(タイミング)t1にn個の点群が存在し、時刻(タイミング)t2(t2≠t1)にn±α個の点群が存在するときに、時刻t1の点とt2の点で、最も確からしい点を対応付けることである。
【0068】
各点が情報として位置情報しか持たない場合には、マッチングの要素として持つのは、各点間の距離情報だけとなる。このとき、最も確からしいと思われるマッチングの解の一つは、対応付けられた点同士の距離dの総和(式(1)参照)が最小となる場合であると考えられる。
【0069】
全ての組み合わせを計算して、総和が最小となる組み合わせを求めることも考えられるが、計算量が膨大となる欠点がある。そこで、この計算量を低減するアルゴリズムとして図4に示す次の例を提案する。
【0070】
(1) 時刻t=t1での点の集合U1={A1,A2,・・・,An}と、時刻t=t2での点の集合U2={B1,B2,・・・,Bn}を得る(ステップS11)。
(2) U2の各点それぞれについて、最も近いU1の点を一つ選びそれを仮対応付けとする(ステップS12)。
(3) U1の各点それぞれについて仮対応付けられたU2の点の数を調べる(ステップS13)。
(4) あるU1の点に対応付けられたU2の点が2つのときには、仮対応付けられたU2の2点を便宜上X、Yと称する(ステップS14)。また、あるU1の点に対応付けられたU2の点が3つ以上のときには、3点以上の点から任意の2点を選び便宜上X、Yと称する(ステップS15)。一方、U1の点に対応付けられたU2の点が1つである場合には、全ての仮対応付けを確定して、マッチングを終了する(ステップS20)。
(5) 仮対応付けられたU2の2点X、Yに対して、点Xから最も近いU1の点をX1、その次に近いU1の点をX2とする。同様に、点Yから最も近いU1の点をY1、その次に近いU1の点をY2とする。ここで、X1とY1は同じ点である。尚、U1の点を選ぶときに、後述のステップS18、19で除外した点は除くものとする(ステップS16)。
(6) Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|の大小を比較する(ステップS17)。ここで|A−B|は、点A、B2点間の距離を表す。
(7) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択する。以降は、Yの対応点としてY1の点は除外する(ステップS18)。
(8) Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する。以降は、Xの対応点としてX1の点は除外する(ステップS19)。
(9) ステップS13〜ステップS19を、全てのU1の点に対応付けられたU2の点の数が1つとなるまで、繰り返す。
【0071】
(1)〜(9)のアルゴリズムに従った具体的処理例を図5に基づき説明する。
図5(a)において、時刻t2の白抜き点○A〜Dを、時刻t1の黒丸点●ア〜エにマッチングすることを考えると、まず、白抜き点○A〜Dを、最も距離の近い時刻t1の黒丸点●に仮対応付ける。●エに対して、○B、○C、○Dの3点が仮対応付けられるので、その中から任意の点として、○Bと○Cとを選択する。
【0072】
そして、|B−B1|+|C−C2|と|B−B2|+|C−C1|との距離を比較する。後者の方が短いので、B2(●ウ)とC1(●エ)とを○B、○Cに仮対応付ける(図5(b))。ここで、○Bは●エの対応付けの候補としては落選したことになり、以降、●エは○Bの対応点としては除外される。
【0073】
依然として、●エに対して○Cと○Dとが仮対応付けされているので、|C−C1|+|D−D2|と|C−C2|+|D−D1|との距離を比較する。後者の方が短いので、C2(●ウ)とD1(●エ)とを○Cと○Dに仮対応付ける(図5(c))。ここで、○Cは●エの対応付けの候補としては落選したことになり、以降、●エは○Cの対応点としては除外される。
【0074】
すると、図5(d)に示すように、●ウに対して、○B、○Cの2点が仮対応付けられるので、|B−B1|+|C−C2|と|B−B2|+|C−C1|との距離を比較する。ここで、最も近い点である●エは、前述のように対応点としては除外されている。後者の方が短いので、B2(●ア)とC1(●ウ)とを○B、○Cに仮対応付ける。以降、●ウは○Bの対応点としては除外される。
【0075】
すると、図5(e)に示すように、●アに対して、○A、○Bの2点が仮対応付けられるので、|A−A1|+|B−B2|と|A−A2|+|B−B1|との距離を比較する。ここで、○Bについては、●エ、●ウは、前述のように対応点としては除外されている。前者の方が近いので、A1(●ア)とB2(●イ)とを○A、○Bに仮対応付ける。
【0076】
こうして、複数対応付けられた黒丸点●がなくなったので、仮対応付けを確定し、処理を終了する。
【0077】
以上のアルゴリズムで少ない計算量でマッチングを行うことができる。
【0078】
図5で示した例の場合に、仮にウィンドウを設定して追尾を行ったとすると、初期捕捉時に、黒丸点●エを中心にウィンドウを設定した場合、図6に示すウィンドウW1ではウィンドウサイズが小さ過ぎるために、マッチングされた○Dが入らず、間違った追尾がなされてしまう。反対に、図6に示すウィンドウW2ではウィンドウサイズが大き過ぎるために、○A、○B、○C、○Dが全て入ってしまい、通常は中心部に近い○Cが選択されてしまい、同様に間違った追尾がなされてしまう。マッチングによって、このような不具合を一掃することができ、正しい追尾を行うことができる。
【0079】
以上の図4〜図5は、前回のスキャン時と今回のスキャン時における目標のマッチングを行う例であったが、今回のスキャン時の目標位置と目標の予測位置とのマッチングを行う場合は、例えば、図7に示すように、前々回のスキャン時の目標位置と前回のスキャン時の目標位置と、その速度が一定であることを前提として、予測位置t1’を求めることができる。そして、予測位置と今回のスキャン時の目標位置との間でのマッチングについては、図4〜図5に示したアルゴリズムと同じ手法により(図5において●または○のいずれか一方を目標の予測位置、いずれか他方を今回のスキャン時の目標の位置とする)、計算量が少なく、且つより精度の高いマッチングを行うことができる。
【0080】
以上の説明においては、前回のスキャン時と今回のスキャン時の目標数が一定であることを前提として行ったが、実際には、目標数が増減する。よって、そのような場合に備えて、マッチングする範囲を予め決めておき、その範囲内でなければマッチングを行わないように制約条件を付加することで、対応付けができない点を許すようにしてもよい。
【0081】
具体的には、図4のアルゴリズムのステップS12の仮対応付けにおいて、「最も近いU1の点が所定距離d以上である場合には、仮対応付けしない」という条件を加え、ステップS18及びS19において、YとY2、XとX2との距離が所定距離d以上である場合には、仮対応付けしない」という条件を加え、ステップS20の仮対応付けを確定する条件としては、全てのU1の点に対応付けられたU2の点の数が1つ以下とすることができる。
【0082】
これによって、明らかに離れた点同士が対応付けされてしまうことを防ぐことができ、時刻t1とt2との数が同数でない場合でも確からしい対応付けを行うことができる。
【0083】
目標数の増減の原因としては、次のような場合が考えられる。
・目標数が増加する場合
(1) 目標が処理範囲の外から進入してきた場合
(2) ノイズやクラッタを目標と誤検出した場合
(3) 目標エコー信号が不安定となり、1つの目標が2つに見えてしまう場合
このような場合、マッチングされなかった新しい位置を、新規目標の位置として、追尾を開始するようにすればよい。ノイズの位置はランダムに近いので、ノイズが新規に捕捉されてしまっても、通常は数スキャンの間に追尾不可能になるはずである。同様に、1つの目標が一時的に2つに見えてしまった場合でも、片方は追尾が継続され、もう片方はロストとなる。しかしながら、追尾中の目標がノイズとマッチングしてしまうと、次回のスキャン時にロストになる可能性がある。
【0084】
このようにノイズとマッチングすることを防ぐために、マッチングの条件として、移動距離を条件とするだけでなく、エコーサイズの大きさを条件とすることができる。即ち、現スキャン(t)の目標iの位置を(xi,t,yi,t)、エコーの大きさをsi,tとし、その前のスキャンの目標位置を(xi,t-1,yi,t-1)、エコーの大きさsi,t-1としたときに、その位置の差di及びサイズの差Δsiとを乗算し、その全目標の総和
【0085】
【数2】
が最小となるようなマッチングを行うようにしてもよい。目標位置が3次元である場合も同様に3次元に拡張すればよい。
【0086】
・目標数が減少する場合
(1) 大きな目標の影に隠れ、エコーが弱くなり、検出ができなくなった場合
(2) 他のエコーと一体化してしまった場合
(3) 目標が処理範囲の外へ出た場合
このような場合、マッチングされなかった前の目標を追尾不可能(ロスト)として扱えばよい。
【0087】
但し、そのように扱うと、(1)、(2)の原因でも目標が検出できなかった場合にすぐにロストになってしまうので、一時的に検出できなかった場合、即ちマッチングできなかった場合であっても、数スキャンの間、仮追尾を行うことが考えられる。仮追尾は、図7に示すような予測位置を求めることで行うことができる。そうすることで、目標エコーが復帰したときに、継続して追尾を行うことができる。
【0088】
また、以上の制約条件を一定に定める他に、マッチングを行う範囲を、追尾状態や船舶情報を用いて動的に変化させることも考えられる。例えば、初期捕捉時に速度情報が得られないときには、マッチング範囲を広くし(所定距離dを大きくする)、速度情報が得られた後は、マッチング範囲を狭く(所定距離dを小さくする)することが考えられる。または、速力が大きな目標は高速船であり高速旋回を行う可能性があるとして、マッチング範囲を広くしてもよい。または、エコーサイズが大きな目標は大型船であり高速旋回を行う可能性は低いとしてマッチング範囲を狭くしてもよい。
【符号の説明】
【0089】
10 目標追尾装置
26 エコーデータメモリ(データメモリ)
36 目標位置マッチング処理部(マッチング処理手段)
38 速度情報算出部(速度情報算出手段)
40 マッチングデータテーブル
74 目標抽出部(目標抽出手段)
82 ウィンドウ予測位置計算部(ウィンドウ計算手段)
86 ウィンドウ初期位置計算部(ウィンドウ計算手段)
【特許請求の範囲】
【請求項1】
時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾装置において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理手段と、
マッチング処理手段で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納するマッチングデータテーブルと、
を備えることを特徴とする目標追尾装置。
【請求項2】
過去の2つ以上のタイミングで取得され同じ目標識別データと関連付けられた目標位置に基づき該目標識別データに対応する目標速度を求める速度情報算出手段をさらに備え、
前記マッチング処理手段は、前記目標速度に基づきあるタイミングにおける目標予測位置を求めて、該目標予測位置とあるタイミングで取得された前記目標位置との対応付けを行うことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
前記マッチング処理手段は、複数の目標位置と複数の被マッチング目標位置に対してその距離の総和が最小となるような対応付けを行うことを特徴とする請求項1または2記載の目標追尾装置。
【請求項4】
前記マッチング処理手段は、複数の目標位置と複数の被マッチング目標位置に対してその距離及び目標の大きさの差異の乗算の総和が最小となるような対応付けを行うことを特徴とする請求項1または2記載の目標追尾装置。
【請求項5】
前記マッチング処理手段は、目標位置と被マッチング目標位置との距離が所定距離を超えている場合には、該目標位置と該被マッチング目標位置との対応付けは行わないことを特徴とする請求項3または4記載の目標追尾装置。
【請求項6】
前記所定距離は、前記目標信号より得られる目標の大きさに応じて変化させることを特徴とする請求項5記載の目標追尾装置。
【請求項7】
前記所定距離は、目標速度の大きさに応じて変化させることを特徴とする請求項5記載の目標追尾装置。
【請求項8】
過去のタイミングで取得された目標位置または過去のタイミングで取得された目標位置及び過去の2つ以上のタイミングで取得された目標位置に基づき求めた目標速度から目標の予測位置を求めて、該予測位置を中心としたウィンドウを追尾対象の目標毎に計算するウィンドウ計算手段と、
ウィンドウ計算手段で計算されたウィンドウ内にあるデータから目標を抽出する目標抽出手段と、
を備え、前記目標抽出手段は、ウィンドウ内に目標とするべきデータが2つ以上存在するとき、またはウィンドウ内に目標とするべきデータが存在しないときに、前記マッチングデータテーブルを参照して、追尾対象の目標の目標識別データに関連付けられた目標位置を抽出することを特徴とする請求項1ないし7のいずれか1項に記載の目標追尾装置。
【請求項9】
前記マッチング処理手段は、
複数の目標位置と複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける仮対応付け手段と、
複数の第1目標位置が仮対応付けられた第2目標位置に対して、一つの第1目標位置を仮対応付けて、別の第1目標位置を別の第2目標位置に仮対応付ける仮対応付け選択手段と、
全ての第2目標位置に1以下の第1目標位置が仮対応付けられたときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する確定手段と、
を備えることを特徴とする請求項1ないし8のいずれか1項に記載の目標追尾装置。
【請求項10】
前記仮対応付け選択手段は、
同じ第2目標位置に対して仮対応付けられた2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する手段と、
Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する手段と、
を備えることを特徴とする請求項9記載の目標追尾装置。
【請求項11】
時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾方法において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理工程と、
マッチング処理工程で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する工程と、
を備えることを特徴とする目標追尾方法。
【請求項12】
前記マッチング処理工程は、
(a) 対象となる複数の目標位置と対象となる複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける工程と、
(b) 第2目標位置に仮対応付けられた第1目標位置の数を求める工程と、
(c) 同じ第2目標位置に仮対応付けられた第1目標位置の数が2以上である場合には、その数が2つである場合に、その2つの第1目標位置X、Yを選択し、その数が3以上である場合に、任意の2つの第1目標位置X、Yを選択する工程と、
(d) 2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する工程と、
(e) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する工程と、
(f) (b)、(d)、(e)の工程を、全ての第2目標位置に1以下の第1目標位置が仮対応付けられるまで繰り返す工程と、
(g) 全ての第2目標位置に仮対応付けられた第1目標位置の数が1以下となったときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する工程と、
を備えることを特徴とする請求項11記載の目標追尾方法。
【請求項1】
時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾装置において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理手段と、
マッチング処理手段で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納するマッチングデータテーブルと、
を備えることを特徴とする目標追尾装置。
【請求項2】
過去の2つ以上のタイミングで取得され同じ目標識別データと関連付けられた目標位置に基づき該目標識別データに対応する目標速度を求める速度情報算出手段をさらに備え、
前記マッチング処理手段は、前記目標速度に基づきあるタイミングにおける目標予測位置を求めて、該目標予測位置とあるタイミングで取得された前記目標位置との対応付けを行うことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
前記マッチング処理手段は、複数の目標位置と複数の被マッチング目標位置に対してその距離の総和が最小となるような対応付けを行うことを特徴とする請求項1または2記載の目標追尾装置。
【請求項4】
前記マッチング処理手段は、複数の目標位置と複数の被マッチング目標位置に対してその距離及び目標の大きさの差異の乗算の総和が最小となるような対応付けを行うことを特徴とする請求項1または2記載の目標追尾装置。
【請求項5】
前記マッチング処理手段は、目標位置と被マッチング目標位置との距離が所定距離を超えている場合には、該目標位置と該被マッチング目標位置との対応付けは行わないことを特徴とする請求項3または4記載の目標追尾装置。
【請求項6】
前記所定距離は、前記目標信号より得られる目標の大きさに応じて変化させることを特徴とする請求項5記載の目標追尾装置。
【請求項7】
前記所定距離は、目標速度の大きさに応じて変化させることを特徴とする請求項5記載の目標追尾装置。
【請求項8】
過去のタイミングで取得された目標位置または過去のタイミングで取得された目標位置及び過去の2つ以上のタイミングで取得された目標位置に基づき求めた目標速度から目標の予測位置を求めて、該予測位置を中心としたウィンドウを追尾対象の目標毎に計算するウィンドウ計算手段と、
ウィンドウ計算手段で計算されたウィンドウ内にあるデータから目標を抽出する目標抽出手段と、
を備え、前記目標抽出手段は、ウィンドウ内に目標とするべきデータが2つ以上存在するとき、またはウィンドウ内に目標とするべきデータが存在しないときに、前記マッチングデータテーブルを参照して、追尾対象の目標の目標識別データに関連付けられた目標位置を抽出することを特徴とする請求項1ないし7のいずれか1項に記載の目標追尾装置。
【請求項9】
前記マッチング処理手段は、
複数の目標位置と複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける仮対応付け手段と、
複数の第1目標位置が仮対応付けられた第2目標位置に対して、一つの第1目標位置を仮対応付けて、別の第1目標位置を別の第2目標位置に仮対応付ける仮対応付け選択手段と、
全ての第2目標位置に1以下の第1目標位置が仮対応付けられたときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する確定手段と、
を備えることを特徴とする請求項1ないし8のいずれか1項に記載の目標追尾装置。
【請求項10】
前記仮対応付け選択手段は、
同じ第2目標位置に対して仮対応付けられた2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する手段と、
Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する手段と、
を備えることを特徴とする請求項9記載の目標追尾装置。
【請求項11】
時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾方法において、
あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行うマッチング処理工程と、
マッチング処理工程で被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する工程と、
を備えることを特徴とする目標追尾方法。
【請求項12】
前記マッチング処理工程は、
(a) 対象となる複数の目標位置と対象となる複数の被マッチング目標位置とのいずれか一方の位置(以下、第1目標位置)に対して、その一方の位置から最も近い他方の位置(以下、第2目標位置)を仮対応付ける工程と、
(b) 第2目標位置に仮対応付けられた第1目標位置の数を求める工程と、
(c) 同じ第2目標位置に仮対応付けられた第1目標位置の数が2以上である場合には、その数が2つである場合に、その2つの第1目標位置X、Yを選択し、その数が3以上である場合に、任意の2つの第1目標位置X、Yを選択する工程と、
(d) 2つの第1目標位置X、Yに対して、それぞれ仮対応付けられた第2目標位置をX1、Y1とし、X1、Y1の次に近い第2目標位置をX2、Y2としたときに、Xd=|X−X1|+|Y−Y2|とYd=|X−X2|+|Y−Y1|(ここで、|A−B|はA、B間の距離を表す)の大小を比較する工程と、
(e) Xd≦Ydである場合には、Xの仮対応点としてX1を選択し、Yの仮対応点としてY2を選択し、Xd>Ydである場合には、Yの仮対応点としてY1を選択し、Xの仮対応点としてX2を選択する工程と、
(f) (b)、(d)、(e)の工程を、全ての第2目標位置に1以下の第1目標位置が仮対応付けられるまで繰り返す工程と、
(g) 全ての第2目標位置に仮対応付けられた第1目標位置の数が1以下となったときに、仮対応付けられた第1目標位置と第2目標位置との対応付けを確定する工程と、
を備えることを特徴とする請求項11記載の目標追尾方法。
【図4】

【図5】
【図6】
【図7】
【図8】
【図1】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図1】
【図2】
【図3】
【公開番号】特開2011−95120(P2011−95120A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−249718(P2009−249718)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003388)東京計器株式会社 (103)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003388)東京計器株式会社 (103)
【Fターム(参考)】
[ Back to top ]