
目標追尾装置及び目標追尾方法
【課題】移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができるようにする。
【解決手段】進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設ける。
【解決手段】進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば、レーダやGPSなどのセンサからなる観測装置を用いて、航空機、船舶、車両などの移動体の位置を観測し、その観測値に基づいて移動体の将来位置と到達時刻を推定する目標追尾装置及び目標追尾方法に関するものである。
【背景技術】
【0002】
近年、移動体の将来位置や、目的地に到達する時刻を計算する技術は、車両のカーナビゲーションシステムや航空管制など、様々な分野で要求されている。
例えば、航空管制では、従来の3次元位置による航法に対して、3次元位置と時間を含む4次元軌道(4DT:4 Dimensional Trajectory)を航法に取り入れる検討がなされている。
この4DTを管理することで、航空交通量や空域容量の予測が可能となることから、運航に対する安全性の向上が期待される。
【0003】
航空管制では、予め設定された経由点を通過するように運航するルールが定められており、航空機が経由点に到達する時刻などが算出される。
航空機が等速直進運動によって、飛行ルート上の経由点へ向かう場合には、航空機が経由点に至るまでの飛行ルート上の将来位置や将来到達時刻などを容易に算出することができる。
しかし、実際には、気象状況の悪化(雷雲などの発生)に伴って、飛行ルートの変更を余儀なくされる場合がある。
雷雲などの進入禁止域への進入を回避するために飛行ルートが変更された場合、航空機の将来位置や将来到達時刻が変更されるため、その将来位置や将来到達時刻を再度推定する必要がある。
【0004】
以下の特許文献1には、移動体の将来位置や将来到達時刻を推定する目標追尾装置が開示されている。
この目標追尾装置では、移動体が等速直進運動によって移動すると仮定して、移動体の現在の速度と機首方向から将来位置を推定するようにしているが、移動体が雷雲などの進入禁止域を回避するために経路を変更すると、等速直進運動による移動ではなくなるため、将来位置の推定精度が悪化することがある。
【0005】
以下の特許文献2には、将来位置を予測する際、複数の運動モデルの中から適切な運動モデルを選択する目標追尾装置が開示されている。
この目標追尾装置では、センサにより観測された位置と追尾予測位置との差(残差)を用いて、複数の運動モデルの中から適切な運動モデルを選択するようにしている。
しかし、運動モデルを選択する際、雷雲などの進入禁止域の位置を考慮していないため、移動体が雷雲などの進入禁止域を回避する必要がある場合などには、将来位置の推定精度が悪化することがある。
【0006】
以下の特許文献3には、将来位置を予測する際、A*アルゴリズムによる最適経路探索方法を用いる目標追尾装置が開示されている。
A*アルゴリズムは、進入禁止域(障害物)を含む経路候補の移動空間をメッシュ上に細分化して、出発地点からゴール地点(または、経由点)までのノードを決定するものであり、経路を決定する際、移動体の運動を考慮せずに、格子点によって決定される。
このため、自然な経路を得るには、格子点の間隔を細かく設定する必要があり、多くの処理時間を要することがある。
【0007】
以下の非特許文献1には、低空飛行を行う飛翔体の操舵量をファジィ推論によって決定する技術が開示されている。
このファジィ推論では、地形を回避するのに必要な操舵量と、経由点に到達するのに必要な操舵量とを入力して、低空飛行を行う飛翔体の操舵量を決定している。
この技術の適用先として、目標がレーダ覆域外となり、観測値が得られない場合の長時間予測技術などが考えられる。
ただし、ファジィ推論におけるルールテーブルやメンバーシップ関数の設定は、試行錯誤による経験的な手法により行われることが多い。
このため、ルール数が増大するにしたがって設定作業が困難になることが想定される。また、将来位置の推定精度はファジィ推論のルールテーブルに依存する問題があった。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2985952号(段落番号[0024])
【特許文献2】特許第4348535号(段落番号[0006]、図1)
【特許文献3】特開2009−251729号公報(段落番号[0078]から[0086])
【非特許文献】
【0009】
【非特許文献1】野本著、「ファジー推論による低対地高度飛行の経路計画」、電子情報通信学会論文誌(B),Vol.J79,No.3 pp.183−190(1995).
【発明の概要】
【発明が解決しようとする課題】
【0010】
従来の目標追尾装置は以上のように構成されているので、移動体が雷雲などの進入禁止域を回避するために経路が変更された場合、移動体の将来位置や将来到達時刻の推定精度が劣化してしまうという課題があった。
【0011】
この発明は上記のような課題を解決するためになされたもので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる目標追尾装置及び目標追尾方法を得ることを目的とする。
【課題を解決するための手段】
【0012】
この発明に係る目標追尾装置は、追尾対象の移動体の観測値を用いて、現時刻における移動体の位置及び速度を算出する位置速度算出手段と、位置速度算出手段により算出された位置及び速度を用いて、指定時間後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、位置速度算出手段により算出された位置及び速度と指向用加速度算出手段により算出された経由点指向用の加速度を用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、回避用加速度算出手段により算出された進入回避用の加速度と位置速度算出手段により算出された位置及び速度を用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定手段とを設け、移動経路予測手段が、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定手段により特定された回避経路が移動体の移動経路であると予測する一方、判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定手段により特定された経由点指向経路が移動体の移動経路であると予測するようにしたものである。
【発明の効果】
【0013】
この発明によれば、追尾対象の移動体の観測値を用いて、現時刻における移動体の位置及び速度を算出する位置速度算出手段と、位置速度算出手段により算出された位置及び速度を用いて、指定時間後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、位置速度算出手段により算出された位置及び速度と指向用加速度算出手段により算出された経由点指向用の加速度を用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、回避用加速度算出手段により算出された進入回避用の加速度と位置速度算出手段により算出された位置及び速度を用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定手段とを設け、移動経路予測手段が、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定手段により特定された回避経路が移動体の移動経路であると予測する一方、判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定手段により特定された経由点指向経路が移動体の移動経路であると予測するように構成したので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる効果がある。
【図面の簡単な説明】
【0014】
【図1】この発明の実施の形態1による目標追尾装置を示す構成図である。
【図2】この発明の実施の形態1による目標追尾装置の処理内容を示すフローチャートである。
【図3】式(2)の運動モデルを示す概念図である。
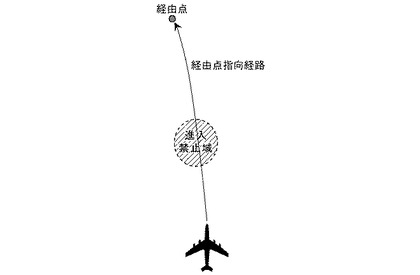
【図4】経由点指向方向を示す説明図である。
【図5】経由点指向経路を示す説明図である。
【図6】移動体の移動経路と到達時刻を示す説明図である。
【図7】回避用加速度算出部14の処理内容を示すフローチャートである。
【図8】水平方向の仮想経路の設定例を示す説明図である。
【図9】進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を示す説明図である。
【図10】回避用加速度算出部14により生成される回避加速度マップの一例を示す説明図である。
【図11】進入回避用の加速度に用いる加速度の組み合わせの選択例1を示す説明図である。
【図12】進入回避用の加速度に用いる加速度の組み合わせの選択例2を示す説明図である。
【図13】進入回避用の加速度に用いる加速度の組み合わせの選択例3を示す説明図である。
【図14】進入回避用の加速度に用いる加速度の組み合わせの選択例4を示す説明図である。
【図15】進入回避用の加速度に用いる加速度の組み合わせの選択例5を示す説明図である。
【図16】回避経路における回避地点と回避時刻を示す説明図である。
【図17】複数の回避地点がある場合の移動経路を示す説明図である。
【図18】この発明の実施の形態2による目標追尾装置を示す構成図である。
【図19】経路長が異なる回避経路を示す説明図である。
【図20】この発明の実施の形態3による目標追尾装置を示す構成図である。
【図21】この発明の実施の形態3による目標追尾装置の移動経路選択部34の処理内容を示すフローチャートである。
【図22】回避用加速度算出部31により算出された進入回避用加速度の一例を示す説明図である。
【発明を実施するための形態】
【0015】
実施の形態1.
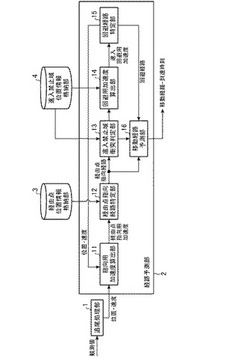
図1はこの発明の実施の形態1による目標追尾装置を示す構成図である。
図1の目標追尾装置は、航空機、船舶、車両などの移動体を追尾する装置であるが、この実施の形態1では、移動体が航空機である例を説明する。
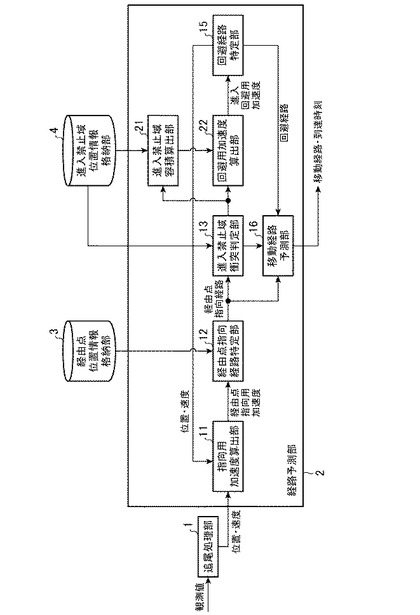
図1において、追尾処理部1は例えばカルマンフィルタなどの追尾フィルタを用いて、追尾対象の移動体の観測値(例えば、レーダやGPSなどのセンサから得られる移動体の位置などを示す観測情報)から、現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する処理を実施する。なお、追尾処理部1は位置速度算出手段を構成している。
【0016】
経路予測部2は移動体の経路を変更する加速度ベクトルukが考慮されている運動モデルに対して、追尾処理部1により算出された状態ベクトルxkを適用することで、移動体の移動経路を予測するとともに、移動体が当該移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
経由点位置情報格納部3は例えばRAMやハードディスクなどの記憶装置から構成されており、移動体の経由点の位置を示す経由点位置情報を格納している。
進入禁止域位置情報格納部4は例えばRAMやハードディスクなどの記憶装置から構成されており、雷雲などの進入禁止域(障害物)の位置を示す進入禁止域位置情報を格納している。
【0017】
経路予測部2の指向用加速度算出部11は追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後(指定時間後)に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する処理を実施する。なお、指向用加速度算出部11は指向用加速度算出手段を構成している。
経由点指向経路特定部12は追尾処理部1により算出された状態ベクトルxkと指向用加速度算出部11により算出された経由点指向用の加速度ベクトルukを上記運動モデルに適用することで、移動体が経由点に至るまでの経路である経由点指向経路を特定する処理を実施する。なお、経由点指向経路特定部12は経由点指向経路特定手段を構成している。
【0018】
進入禁止域衝突判定部13は経由点指向経路特定部12により特定された経由点指向経路上の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで、その経由点指向経路が進入禁止域内に入る経路であるか否かを判定する処理を実施する。なお、進入禁止域衝突判定部13は判定手段を構成している。
回避用加速度算出部14は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。なお、回避用加速度算出部14は回避用加速度算出手段を構成している。
【0019】
回避経路特定部15は回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する処理を実施する。なお、回避経路特定部15は回避経路特定手段を構成している。
移動経路予測部16は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する処理を実施する。
また、移動経路予測部16は移動体が予測した移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
なお、移動経路予測部16は移動経路予測手段及び到達時刻算出手段を構成している。
【0020】
図1の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、回避用加速度算出部14、回避経路特定部15及び移動経路予測部16のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、回避用加速度算出部14、回避経路特定部15及び移動経路予測部16の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
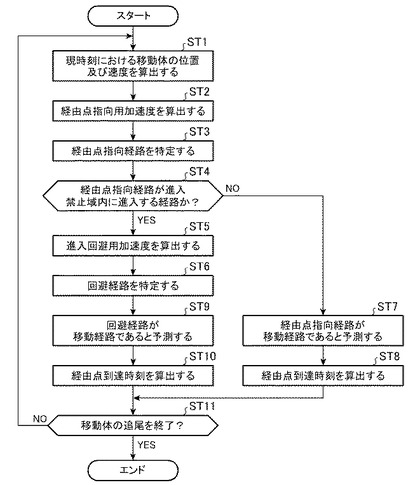
図2はこの発明の実施の形態1による目標追尾装置の処理内容を示すフローチャートである。
【0021】
次に動作について説明する。
追尾処理部1は、例えばカルマンフィルタなどの追尾フィルタを実装しており、レーダやGPSなどのセンサから追尾中の移動体の観測値(移動体の位置などを示す観測情報)を受けると、その観測値に基づいて現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する(図2のステップST1)。

ここでは、追尾処理部1がカルマンフィルタを実装している例を示しているが、追尾フィルタはカルマンフィルタに限るものではなく、他の公知のフィルタを実装するようにしてもよい。
【0022】
経路予測部2は、追尾処理部1が状態ベクトルxkを算出すると、下記の式(2)に示すように、移動体の経路を変更する加速度ベクトルukが考慮されている運動モデルに対して、その状態ベクトルxkを適用することで、移動体の移動経路を予測するとともに、移動体が当該移動経路上を移動して経由点に到達する時刻を算出する。
式(2)において、xkは時刻tkにおける状態ベクトル(位置・速度)、Φkは時刻tkから時刻tk+1に推移する際の既知の状態ベクトル推移行列、ukは運動座標における加速度ベクトル、Γkは加速度ベクトルukの運動座標から北基準直交座標に変換する際の既知の変換行列である。
【0023】
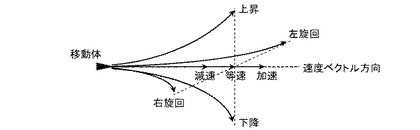
ここで、図3は式(2)の運動モデルを示す概念図である。
移動体は加速度ベクトルukが設定されることで、図3に示すように、直線的に移動している状態から、左旋回/右旋回を行う状態、上昇/下降を行う状態又は加速/減速を行う状態に変化する。
加速度ベクトルukは、レーダやGPSなどのセンサからは観測不可能な値であるので、この実施の形態1では、後述する指向用加速度算出部11及び回避用加速度算出部14が算出するようにしている。
以下、経路予測部2の処理内容を具体的に説明する。
【0024】
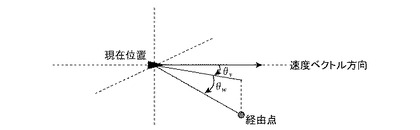
この実施の形態1では、移動体である航空機は、図4に示すように、経由点位置情報格納部3により格納されている経由点位置情報が示す経由点を目指して飛行しているものとする。
指向用加速度算出部11は、追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後(指定時間後)に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する(ステップST2)。
即ち、指向用加速度算出部11は、下記の式(3)〜(5)を計算することで、経由点指向用の加速度ベクトルukを算出する。
【0025】
ただし、vgは移動体の水平方向の加速度、wgは移動体の鉛直方向の加速度、θvは移動体の水平方向の指向角度、θwは移動体の鉛直方向の指向角度である。
【0026】
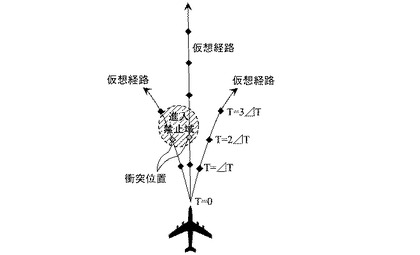
経由点指向経路特定部12は、指向用加速度算出部11が経由点指向用の加速度ベクトルukを算出すると、その経由点指向用の加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図5に示すように、移動体が経由点に至るまでの経路(予測時間Tmaxまでの経路)である経由点指向経路を特定する(ステップST3)。
即ち、経由点指向経路特定部12は、式(2)に基づいて、現時刻tkからTa秒後における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で移動するものとして、経由点に至るまでの経由点指向経路を特定する(図6を参照)。
【0027】
進入禁止域衝突判定部13は、経由点指向経路特定部12が経由点指向経路を特定すると、例えば時刻ΔT刻みで、その経由点指向経路上での移動体の位置を算出し、各時刻における移動体の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで、その経由点指向経路が進入禁止域内に入る経路であるか否かを判定する(ステップST4)。
【0028】
回避用加速度算出部14は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、現時刻tkにおける移動体の進行方向を基準とする7種類の運動モデル(直進、加速、減速、左旋回、右旋回、上昇、下降)を考慮して(図3を参照)、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する(ステップST5)。
以下、回避用加速度算出部14による進入回避用の加速度の算出処理を具体的に説明する。ただし、ここでは、説明の簡単化のため、移動体が加速及び減速を行わないものとする。
【0029】
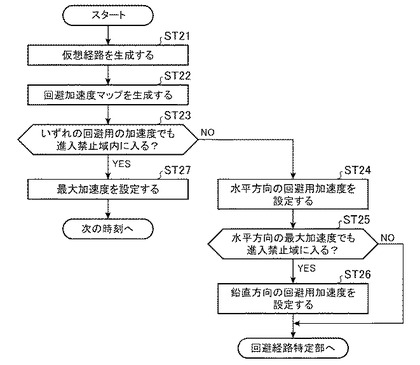
図7は回避用加速度算出部14の処理内容を示すフローチャートである。
まず、回避用加速度算出部14は、移動体の性能から想定される水平方向の最大加速度を上限として、Δuステップで水平方向の加速度の候補を設定する。
回避用加速度算出部14は、水平方向の加速度の候補を複数設定すると、各加速度の候補で経由点指向経路を変更した場合の経路を仮想して、複数の仮想経路を生成する(図7のステップST21)。
図8は水平方向の仮想経路の設定例を示す説明図であり、図8では、3個の仮想経路を設定している例を示している。
【0030】
回避用加速度算出部14は、複数の仮想経路を生成すると、仮想経路毎に、当該仮想経路が進入禁止域内に入る経路であるか否かを判定する。
仮想経路が進入禁止域内に入る経路であるか否かの判定は、進入禁止域衝突判定部13と同様に、仮想経路上での各時刻における移動体の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで判定することができる。
【0031】
回避用加速度算出部14は、当該仮想経路が進入禁止域内に入る経路である場合、移動体の性能から想定される鉛直方向の最大加速度を上限として、進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出する(図9を参照)。
即ち、回避用加速度算出部14は、移動体が進入禁止域内に進入する進入時刻Tc(図8の例では、2ΔTの時刻)を算出し、その進入時刻Tcにおいて、例えば、Δuステップで、鉛直方向の加速度を大きくすることで、当該仮想経路を鉛直方向に段階的に変更する。
回避用加速度算出部14は、当該仮想経路を鉛直方向に段階的に変更することで、当該仮想経路が進入禁止域内に入る経路から、進入禁止域内に入らない経路に変化する際の鉛直方向の加速度を探索する。
ただし、鉛直方向の最大加速度を設定しても、当該仮想経路が進入禁止域内に入る経路である場合、必要最小限の鉛直方向の加速度として、最大加速度を設定する。
【0032】
ここでは、当該仮想経路を鉛直方向に段階的に変更することで、必要最小限の鉛直方向の加速度を探索する例を示したが、下記の式(6)を計算することで、必要最小限の鉛直方向の加速度を算出するようにしてもよい。
ただし、Hは進入禁止域を回避するために必要な高度差、Tcは進入時刻(ΔTステップで設定した時刻の中で、進入禁止域内に入る最小の時刻)、wg,Hは高度差Hを回避するために必要な鉛直方向の加速度である。
【0033】
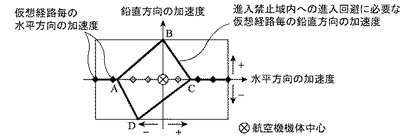
回避用加速度算出部14は、仮想経路毎に、最小限の鉛直方向の加速度を算出すると、当該仮想経路に対応する水平方向の加速度(当該仮想経路を生成する際に、経由点指向経路の変更に用いている水平方向の加速度の候補)と、当該仮想経路に対応する鉛直方向の加速度との組み合わせが得られるので、当該仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせを示す回避加速度マップを生成する(ステップST22)。
図10は回避用加速度算出部14により生成される回避加速度マップの一例を示す説明図である。
図10の例では、ABCDで囲まれている領域が進入禁止域であり、上記領域の外側の領域が進入禁止域外である。
【0034】
回避用加速度算出部14は、各仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせを示す回避加速度マップを生成すると、その回避加速度マップを利用して、各仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせの中から、進入禁止域内への進入を回避するために必要な進入回避用の加速度に用いる加速度の組み合わせを選択する。
具体的には、以下のようにして、進入回避用の加速度に用いる加速度の組み合わせを選択する。
【0035】
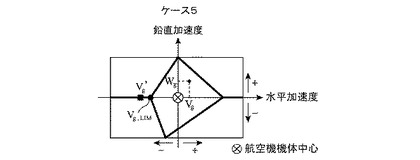
図11〜図15は進入回避用の加速度に用いる加速度の組み合わせの選択例を示す説明図である。
図において、vgは経由点指向用の加速度ベクトルukにおける水平方向の加速度、wgは経由点指向用の加速度ベクトルukにおける鉛直方向の加速度、v’gは水平方向の進入回避用加速度、w’gは鉛直方向の進入回避用加速度である。
この実施の形態1では、移動体が民間の航空機である等の場合、鉛直方向の加速度を変化させるよりも、水平方向の加速度を変化させることが、より自然な運航であるため(対地高度を一定とする運航)、水平方向を変化させる組み合わせを優先的に選択するものとする(鉛直方向の加速度が小さい組み合わせを優先的に選択するものとする)。
特に、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ水平方向の回避加速度を変化させる組み合わせを優先的に選択するものとする。
【0036】
[優先順位1]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ加速度であり、鉛直方向の進入回避用加速度w’gがゼロ(対地高度が一定)である組み合わせを選択する。
このケースは図11に示すケース1に該当し、水平方向の進入回避用加速度v’gは、下記の式(7)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvg(Δvgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する(ステップST23,ST24)。
このケースでは、対地高度を一定とするため、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0037】
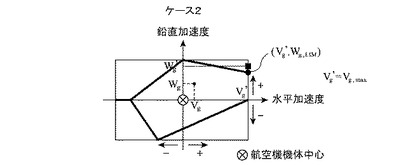
[優先順位2]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度であり、鉛直方向の進入回避用加速度w’gが経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ加速度の組み合わせを選択する。
このケースは図12に示すケース2に該当し、水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する(ステップST23,ST24)。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(8)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwg(Δwgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する(ステップST25,ST26)。
【0038】
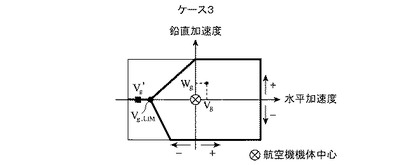
[優先順位3]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を最大値にしても進入禁止域内となるが、その加速度vgと逆符号である条件下で、水平方向の回避加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと逆の符号を持つ加速度であり、鉛直方向の進入回避用加速度w’gがゼロ(対地高度が一定)である組み合わせを選択する。
このケースは図13に示すケース3に該当し、水平方向の進入回避用加速度v’gは、下記の式(9)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvgを加えることで算出する(ステップST23,ST24)。
このケースでは、対地高度を一定とするため、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0039】
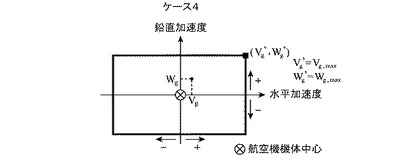
[優先順位4]
「いずれの進入回避用の加速度を選択しても、進入禁止域内となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度であり、鉛直方向の進入回避用加速度w’gが経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度である組み合わせを選択する。
このケースは図14に示すケース4に該当し、水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する(ステップST23,ST27)。
v’g=vg,max
また、鉛直方向の進入回避用加速度w’gは、経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度wg,maxに設定する(ステップST23,ST27)。
w’g=wg,max
【0040】
ここでは、ケース4に該当する場合、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定し、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定する例を示したが、最大加速度に設定しても、進入禁止域内への進入を回避することができないので、追尾航跡が更新される次の時刻まで待って、進入回避用の加速度を設定する処理を再度実施するようにしてもよい。
あるいは、上記の経由点と異なる他の経由点について、進入回避用の加速度を設定する処理を実施するようにしてもよい。
【0041】
ここでは、水平方向の回避加速度を最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合(以下、「場合A」と称する)を優先順位2として、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同符号では、水平方向の回避加速度を最大値としても進入禁止域内となるが、その加速度vgと逆の符号で、水平方向の回避加速度を変化させることで進入禁止域外となる場合(以下、「場合B」と称する)を優先順位3としているが、優先順位を逆にして、場合Aを優先順位3にして、場合Bを優先順位2にしてもよい。
【0042】
また、優先順位3のケースに該当しない場合、直ちに、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定して、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定しているが、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと逆符号である条件下で、水平方向の回避加速度を最大加速度vg,maxに設定して、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合には、そのように進入回避用加速度を設定するようにしてもよい。
【0043】
ここでは、回避用加速度算出部14が、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を変化させる組み合わせを優先的に選択するものを示したが、図15に示すように、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号によらず、変化が最小の加速度を水平方向の進入回避用加速度v’gとして優先的に設定するようにしてもよい。
即ち、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号と逆の符号を持つ最小限の値vg,LIMが、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号と同じ符号を持つ最小限の値vg,LIMより小さい場合、逆の符号を持つ最小限の値vg,LIMから水平方向の進入回避用加速度v’gを算出するようにしてもよい。
また、ここでは、説明の簡単化のために、移動体が加速及び減速を行わないものとして説明したが、加速及び減速を含めて仮想経路を生成するようにしてもよいことは言うまでもない。
【0044】
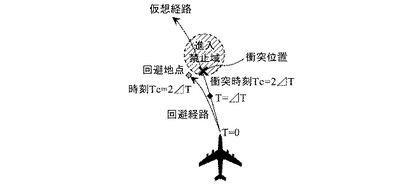
回避経路特定部15は、回避用加速度算出部14が進入回避用の加速度(水平方向の進入回避用加速度v’g、鉛直方向の進入回避用加速度w’g)を算出すると、その進入回避用の加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図16に示すように、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する(図2のステップST6)。
【0045】
即ち、回避経路特定部15は、移動体が進入禁止域内に進入する進入時刻Tcを回避時刻Tvとして、加速度ベクトルukと状態ベクトルxkを式(2)の運動モデルに適用することで、回避時刻Tvにおける移動体の位置(図16では、「回避地点」と記述している)と、移動体の速度を算出する。
回避経路特定部15は、その回避地点と移動体の速度を追尾航跡の位置・速度とみなすことで、移動体の出発地点(または、前回の回避地点)から回避地点までの経路を回避経路として特定する。
【0046】
回避経路特定部15は、回避経路における移動体の各時刻の位置及び速度を指向用加速度算出部11にフィードバックすることで、指向用加速度算出部11が各時刻の位置及び速度から経由点用の加速度を算出し、進入禁止域衝突判定部13において、経由点指向経路特定部12により特定された経由点指向経路が進入禁止域内に入らない経路と判定されるまで、指向用加速度算出部11〜回避経路特定部15の間でループ処理を実施する。
【0047】
移動経路予測部16は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合(ステップST4)、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する(ステップST7)。
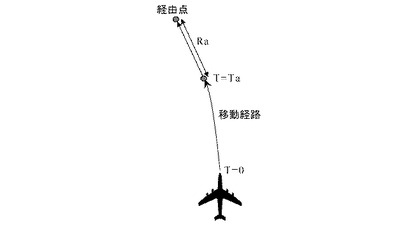
移動経路予測部16は、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測すると、式(2)に基づいて、現時刻tkからTa秒後(指定時間後)における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で経由点に向かうものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する(図6を参照)。
【0048】
また、移動経路予測部16は、その指向終了位置と経由点の間の距離Raと、その指向終了位置における移動体の速度Vaとから、移動体が経由点に到達する時刻Tpを算出する(ステップST8)。
【0049】
移動経路予測部16は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、図16に示すように、回避経路特定部15により特定された回避経路(現地点から回避地点までの経路)が移動体の移動経路であると予測する(ステップST9)。
移動経路予測部16は、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測すると、回避時刻Tvにおける回避地点から経由点までは等速直線運動で移動するものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
【0050】
移動経路予測部16は、図17に示すように、複数の回避地点がある場合、最終の回避地点から経由点に到達する時間と、複数の回避地点間の移動に要する時間(複数の回避地点における回避時刻Tvの差分)との和を求めることで、移動体が経由点に到達する時刻Tpを算出する(ステップST10)。
式(12)において、右辺第2項は式(11)の右辺と同じ意味であり、Tv,iはi−1番目からi番目の回避地点に到達するまでに要する時間である。ただし、i=1である場合に限り、現在位置から1番目の回避地点に到達するまでに要する時間である。
【0051】
図1の目標追尾装置は、移動体の追尾を継続する場合、ステップST1の処理に戻り、ステップST1〜ST10の処理を繰り返し実施する(ステップST11)。
【0052】
以上で明らかなように、この実施の形態1によれば、追尾対象の移動体の観測値を用いて、現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する追尾処理部1と、追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する指向用加速度算出部11と、追尾処理部1により算出された状態ベクトルxkと指向用加速度算出部11により算出された経由点指向用の加速度ベクトルukを用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定部12と、経由点指向経路特定部12により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する進入禁止域衝突判定部13と、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設け、移動経路予測部16が、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測するように構成したので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる効果を奏する。
【0053】
また、この実施の形態1によれば、移動経路予測部16が、移動体が予測した移動経路上を移動して経由点に到達する時刻を算出するように構成したので、移動体が経由点に到達する時刻を高精度に推定することができる効果を奏する。
【0054】
また、この実施の形態1によれば、回避用加速度算出部14が、水平方向及び鉛直方向の複数の加速度の組み合わせのうち、鉛直方向の加速度が小さい組み合わせを優先的に選択するように構成したので、例えば、移動体が民間の航空機である等の場合には、より自然な運航(対地高度を一定とする運航)に見合う進入回避用加速度を算出することができるようになり、その結果、移動体の将来位置や経由点到達時刻等の推定精度を高めることができる効果を奏する。
【0055】
なお、この実施の形態1では、指向用加速度算出部11が追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出するものを示したが、式(2)の右辺第1項の状態ベクトルxkの速度成分については、追尾フィルタによって、レーダやGPSなどのセンサの観測値が示す位置から推定した速度を用いるようにしてもよい。また、移動体から得られる速度情報を用いるようにしてもよい。
【0056】
例えば、移動体が航空機である場合、航空機の機体から真対気速度が得られるので、風速データを加味することで対地速度が算出することができる。
このため、対地速度を状態ベクトルxkの速度成分として用いるようにしてもよい。
予め、目標進行予定の空間における風速データが既知の場合には、風速による状態ベクトルの速度変化を仮想経路の生成や、移動経路の予測に反映することが可能である。
【0057】
この実施の形態1では、回避用加速度算出部14が進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出するものを示したが、複数の回避地点が存在する場合、複数の回避地点の間で、進入回避用加速度が大きく異なるケースが発生することがある。
そこで、隣り合う回避地点で、進入回避用加速度が急激に変化する状況の発生を防止するために、予め加速度変化率パラメータΔαを設定し、時間方向に対して、Δα刻みで進入回避用加速度を変化させるようにしてもよい。
【0058】
この実施の形態1では、進入禁止域が1つである例を説明したが、進入禁止域が複数存在する場合でも、同様の処理を繰り返すことで、進入禁止域内への進入を回避することが可能である。
【0059】
実施の形態2.
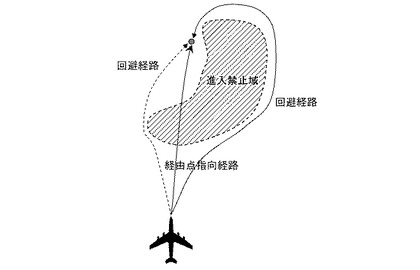
上記実施の形態1では、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避用加速度算出部14が、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出し、回避経路特定部15が回避用加速度算出部14により算出された進入回避用の加速度を用いて、回避経路を特定するものを示したが、図19に示すように、進入禁止域が進行方向に対して奥行きがある形を成している場合、回避経路特定部15により特定される可能性がある回避経路(図中、実線の経路)が、他の回避経路(図中、点線の経路)よりも経路長が長くなる場合がある。
この実施の形態2では、進入禁止域が進行方向に対して奥行きがある形を成している場合でも、経路長が短い回避経路を特定することができるようにしている。
【0060】
図18はこの発明の実施の形態2による目標追尾装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
進入禁止域容積算出部21は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域における経由点指向経路の進行方向左側の容積を算出するとともに、その進入禁止域における経由点指向経路の進行方向右側の容積を算出する処理を実施する。なお、進入禁止域容積算出部21は容積算出手段を構成している。
【0061】
回避用加速度算出部22は進入禁止域容積算出部21により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。なお、回避用加速度算出部22は回避用加速度算出手段を構成している。
【0062】
図18の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部22、回避経路特定部15及び移動経路予測部16のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部22、回避経路特定部15及び移動経路予測部16の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
【0063】
次に動作について説明する。
進入禁止域容積算出部21は、進入禁止域衝突判定部13が上記実施の形態1と同様にして、経由点指向経路が進入禁止域内に入る経路であるか否かの判定処理を行うと、その判定結果が、経由点指向経路が進入禁止域内に入る経路である旨を示していれば、進入禁止域位置情報格納部4により格納されている進入禁止域位置情報を参照して、進入禁止域の形状を確認する。
進入禁止域容積算出部21は、進入禁止域の形状を確認すると、その進入禁止域と経由点指向経路特定部12により特定された経由点指向経路の位置関係を把握し、その経由点指向経路に対して、進入禁止域を進行方向左側のエリアと右側のエリアに分断する。
【0064】
進入禁止域容積算出部21は、進行方向左側のエリア及び右側のエリアの形状を把握することで、進行方向左側のエリアの容積と、進行方向右側のエリアの容積とを算出して、その算出結果を回避用加速度算出部22に出力する。
なお、正確な容積を算出することができない場合には、容積に相当する量(例えば、奥行きの長さ×幅)を算出し、容積に相当する量をエリアの容積として回避用加速度算出部22に出力する。
【0065】
回避用加速度算出部22は、進入禁止域容積算出部21が進行方向左側のエリアの容積と、進行方向右側のエリアの容積とを算出すると、容積が小さいエリア側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
ただし、容積が小さいエリア側の方向に移動体が移動することでは、進入禁止域内への進入を回避することができない場合、容積が大きいエリア側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
図19の例では、進行方向左側のエリアの容積が、進行方向右側のエリアの容積より小さいので、下記に示す優先順位にしたがって、進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
【0066】
[優先順位1]
「水平方向の回避加速度を進行方向左側に変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、下記の式(13)に示すように、進行方向左側において、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvg(Δvgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する。
この場合、鉛直方向の進入回避加速度を変化させる必要がないので、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0067】
[優先順位2]
「水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、進行方向左側の向きに最大加速度vg,maxを設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(14)に示すように、進行方向左側において、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwg(Δwgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する。
【0068】
[優先順位3]
「水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、水平方向の回避加速度を進行方向右側に変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、下記の式(15)に示すように、進行方向右側において、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvgを加えることで算出する。
この場合、鉛直方向の進入回避加速度を変化させる必要がないので、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0069】
[優先順位4]
「水平方向の回避加速度を進行方向右側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、進行方向右側の向きに最大加速度vg,maxを設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(16)に示すように、進行方向右側において、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwgを加えることで算出する。
【0070】
[優先順位5]
「いずれの進入回避用の加速度を選択しても、進入禁止域内となる場合」
水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度wg,maxに設定する。
w’g=wg,max
【0071】
優先順位5の場合、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定し、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定する例を示したが、最大加速度に設定しても、進入禁止域内への進入を回避することができないので、追尾航跡が更新される次の時刻まで待って、進入回避用の加速度を設定する処理を再度実施するようにしてもよい。
あるいは、上記の経由点と異なる他の経由点について、進入回避用の加速度を設定する処理を実施するようにしてもよい。
【0072】
ここでは、水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合(以下、「場合A」と称する)を優先順位2として、水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、水平方向の回避加速度を進行方向右側に変化させることで進入禁止域外となる場合(以下、「場合B」と称する)を優先順位3としているが、優先順位を逆にして、場合Aを優先順位3にして、場合Bを優先順位2にしてもよい。
【0073】
回避経路特定部15は、回避用加速度算出部22が進入回避用の加速度(水平方向の進入回避用加速度v’g、鉛直方向の進入回避用加速度w’g)を算出すると、上記実施の形態1と同様に、その進入回避用の加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図19に示すように、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する。
これにより、回避用加速度算出部22により高い優先順位1,2で進入回避用加速度が算出されている場合、進入禁止域が進行方向に対して奥行きがある形を成していても、経路長が短い経路(図中、点線の経路)が回避経路となる。
移動経路予測部16の処理内容は、上記実施の形態1と同様であるため説明を省略する。
【0074】
以上で明らかなように、この実施の形態2によれば、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域における経由点指向経路の進行方向左側の容積を算出するとともに、その進入禁止域における経由点指向経路の進行方向右側の容積を算出する進入禁止域容積算出部21を設け、回避用加速度算出部22が、進入禁止域容積算出部21により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出するように構成したので、進入禁止域が進行方向に対して奥行きがある形を成している場合でも、経路長が短い回避経路を特定することができる効果を奏する。
【0075】
実施の形態3.
上記実施の形態1,2では、回避経路特定部15が1つの回避経路を特定し、経由点指向経路が進入禁止域内に入る経路であれば、移動経路予測部16が回避経路特定部15により特定された回避経路が移動体の移動経路であると予測するものを示したが、回避経路特定部15が複数の回避経路を特定し、経由点指向経路が進入禁止域内に入る経路であれば、移動経路予測部16が回避経路特定部15により特定された複数の回避経路が移動体の移動経路であると予測し、複数の移動経路の中で、経由点の到達時刻Tp又は進入回避用の加速度が最小となる移動経路を選択するようにしてもよい。
【0076】
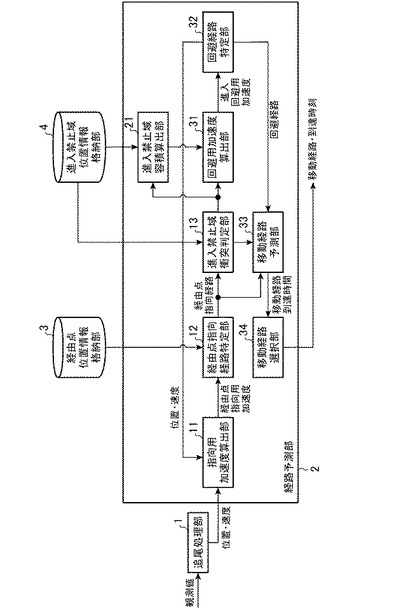
図20はこの発明の実施の形態3による目標追尾装置を示す構成図であり、図において、図18と同一符号は同一または相当部分を示すので説明を省略する。
回避用加速度算出部31は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。
回避用加速度算出部31における進入回避用の加速度の算出方法は、図1の回避用加速度算出部14の算出方法と同一であってもよいし、図18の回避用加速度算出部22の算出方法と同一であってもよいが、回避用加速度算出部31では、進入回避用の加速度を複数算出する。
なお、回避用加速度算出部31は回避用加速度算出手段を構成している。
【0077】
回避経路特定部32は回避用加速度算出部31により算出された複数の進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る複数の回避経路を特定する処理を実施する。なお、回避経路特定部32は回避経路特定手段を構成している。
移動経路予測部33は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部32により特定された複数の回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する処理を実施する。
また、移動経路予測部33は移動体が予測した移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
なお、移動経路予測部33は移動経路予測手段及び到達時刻算出手段を構成している。
【0078】
移動経路選択部34は移動経路予測部33により複数の回避経路が移動体の移動経路であると予測された場合、複数の移動経路の中で、移動経路予測部33により算出された経由点到達時刻Tp又は回避用加速度算出部31により算出された進入回避用の加速度が最小となる移動経路を選択する処理を実施する。なお、移動経路選択部34は移動経路選択手段を構成している。
【0079】
図20の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部31、回避経路特定部32、移動経路予測部33及び移動経路選択部34のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部31、回避経路特定部32、移動経路予測部33及び移動経路選択部34の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
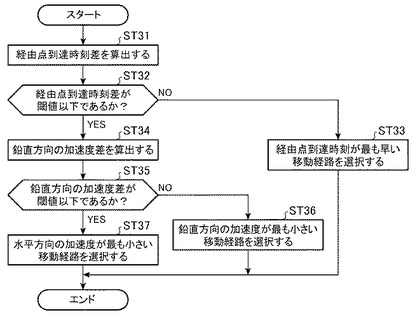
図21はこの発明の実施の形態3による目標追尾装置の移動経路選択部34の処理内容を示すフローチャートである。
【0080】
次に動作について説明する。
回避用加速度算出部31は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を複数算出する。
回避用加速度算出部31における進入回避用の加速度の算出方法は、特に問わないが、図1の回避用加速度算出部14と同様にして、例えば、図22に示すように、第1の進入回避用加速度(水平方向の進入回避用加速度v’g1,鉛直方向の進入回避用加速度w’g1)を算出し、図18の回避用加速度算出部22と同様にして、第2の進入回避用加速度(水平方向の進入回避用加速度v’g2,鉛直方向の進入回避用加速度w’g2)を算出する。
以降の説明では、説明の簡単化のため、図22に示すように、回避用加速度算出部31が、2つの進入回避用加速度(第1の進入回避用加速度、第2の進入回避用加速度)を算出するものとするが、3以上の進入回避用加速度を算出するようにしてもよい。
【0081】
回避経路特定部32は、回避用加速度算出部31が第1の進入回避用加速度と第2の進入回避用加速度を算出すると、図1の回避経路特定部15と同様に、第1の進入回避用加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、移動体が進入禁止域内に入らずに経由点に至る第1の回避経路を特定する。
また、第2の進入回避用加速度を加速度ベクトルukとして、その加速度ベクトルukと状態ベクトルxkを式(2)の運動モデルに適用することで、移動体が進入禁止域内に入らずに経由点に至る第2の回避経路を特定する。
言うまでもないが、回避用加速度算出部31がN個の進入回避用加速度を算出していれば、回避経路特定部32がN個の回避経路を特定する。
【0082】
移動経路予測部33は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、図1の移動経路予測部16と同様に、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する。
移動経路予測部33は、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測すると、図1の移動経路予測部16と同様に、現時刻tkからTa秒後における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で経由点に向かうものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
また、移動経路予測部33は、図1の移動経路予測部16と同様に、その指向終了位置と経由点の間の距離Raと、その指向終了位置における移動体の速度Vaとから、移動体が経由点に到達する時刻Tpを算出する。
【0083】
移動経路予測部33は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部32により特定された第1及び第2の回避経路(現地点から回避地点までの経路)のそれぞれが移動体の移動経路であると予測する。
移動経路予測部33は、回避経路特定部32により特定された第1及び第2の回避経路が移動体の移動経路であると予測すると、回避時刻Tvにおける回避地点から経由点までは等速直線運動で移動するものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
また、移動経路予測部33は、図1の移動経路予測部16と同様にして、移動体が第1の回避経路上を移動する場合の経由点到達時刻Tp,1を算出し、また、移動体が第2の回避経路上を移動する場合の経由点到達時刻Tp,2を算出する。
【0084】
移動経路選択部34は、移動経路予測部33により経由点指向経路が移動体の移動経路であると予測された場合、その移動経路と移動経路予測部33により算出された経由点到達時刻Tpを出力する。
一方、移動経路予測部33により第1及び第2の回避経路が移動体の移動経路であると予測された場合、移動体が第1の回避経路上を移動する場合の経由点到達時刻Tp,1と、移動体が第2の回避経路上を移動する場合の経由点到達時刻Tp,2との時刻差ΔTpを算出する(図21のステップST31)。
【0085】
移動経路選択部34は、経由点到達時刻の時刻差ΔTpを算出すると、その時刻差ΔTpを所定の閾値と比較し(ステップST32)、その時刻差ΔTpが所定の閾値より大きければ、経由点到達時刻Tpが最も早い移動経路(回避経路)を選択し、その移動経路と最も早い経由点到達時刻Tpを出力する(ステップST33)。
例えば、経由点到達時刻Tp,1が経由点到達時刻Tp,2より早ければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、経由点到達時刻Tp,2が経由点到達時刻Tp,1より早ければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0086】
移動経路選択部34は、経由点到達時刻の時刻差ΔTpが所定の閾値以下である場合、移動体が第1の回避経路上を移動する場合の鉛直方向の進入回避用加速度w’g1と、移動体が第2の回避経路上を移動する場合の鉛直方向の進入回避用加速度w’g2との加速度差Δw’gを算出する(ステップST34)。
【0087】
移動経路選択部34は、鉛直方向の加速度差Δw’gを算出すると、その加速度差Δw’gを所定の閾値と比較し(ステップST35)、その加速度差Δw’gが所定の閾値より大きければ、鉛直方向の進入回避用加速度w’gが最も小さい移動経路(回避経路)を選択し、その移動経路と経由点到達時刻Tpを出力する(ステップST36)。
例えば、進入回避用加速度w’g1が進入回避用加速度w’g2より小さければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、進入回避用加速度w’g2が進入回避用加速度w’g1より小さければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0088】
一方、加速度差Δw’gが所定の閾値以内である場合、移動体が第1の回避経路上を移動する場合の水平方向の進入回避用加速度v’g1と、移動体が第2の回避経路上を移動する場合の水平方向の進入回避用加速度v’g2とを比較し、水平方向の進入回避用加速度v’gが最も小さい移動経路(回避経路)を選択し、その移動経路と経由点到達時刻Tpを出力する(ステップST37)。
例えば、進入回避用加速度v’g1が進入回避用加速度v’g2より小さければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、進入回避用加速度v’g2が進入回避用加速度v’g1より小さければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0089】
以上で明らかなように、この実施の形態3によれば、移動経路予測部33により複数の回避経路が移動体の移動経路であると予測された場合、移動経路選択部34が、複数の移動経路の中で、移動経路予測部33により算出された経由点到達時刻Tp又は回避用加速度算出部31により算出された進入回避用の加速度が最小となる移動経路を選択するように構成したので、現実の運航に近いスムーズな移動経路を予測することができる効果を奏する。
【0090】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0091】
1 追尾処理部(位置速度算出手段)、2 経路予測部、3 経由点位置情報格納部、4 進入禁止域位置情報格納部、11 指向用加速度算出部(指向用加速度算出手段)、12 経由点指向経路特定部(経由点指向経路特定手段)、13 進入禁止域衝突判定部(判定手段)、14 回避用加速度算出部(回避用加速度算出手段)、15 回避経路特定部(回避経路特定手段)、16 移動経路予測部(移動経路予測手段、到達時刻算出手段)、21 進入禁止域容積算出部(容積算出手段)、22 回避用加速度算出部(回避用加速度算出手段)、31 回避用加速度算出部(回避用加速度算出手段)、32 回避経路特定部(回避経路特定手段)、33 移動経路予測部(移動経路予測手段、到達時刻算出手段)、34 移動経路選択部(移動経路選択手段)。
【技術分野】
【0001】
この発明は、例えば、レーダやGPSなどのセンサからなる観測装置を用いて、航空機、船舶、車両などの移動体の位置を観測し、その観測値に基づいて移動体の将来位置と到達時刻を推定する目標追尾装置及び目標追尾方法に関するものである。
【背景技術】
【0002】
近年、移動体の将来位置や、目的地に到達する時刻を計算する技術は、車両のカーナビゲーションシステムや航空管制など、様々な分野で要求されている。
例えば、航空管制では、従来の3次元位置による航法に対して、3次元位置と時間を含む4次元軌道(4DT:4 Dimensional Trajectory)を航法に取り入れる検討がなされている。
この4DTを管理することで、航空交通量や空域容量の予測が可能となることから、運航に対する安全性の向上が期待される。
【0003】
航空管制では、予め設定された経由点を通過するように運航するルールが定められており、航空機が経由点に到達する時刻などが算出される。
航空機が等速直進運動によって、飛行ルート上の経由点へ向かう場合には、航空機が経由点に至るまでの飛行ルート上の将来位置や将来到達時刻などを容易に算出することができる。
しかし、実際には、気象状況の悪化(雷雲などの発生)に伴って、飛行ルートの変更を余儀なくされる場合がある。
雷雲などの進入禁止域への進入を回避するために飛行ルートが変更された場合、航空機の将来位置や将来到達時刻が変更されるため、その将来位置や将来到達時刻を再度推定する必要がある。
【0004】
以下の特許文献1には、移動体の将来位置や将来到達時刻を推定する目標追尾装置が開示されている。
この目標追尾装置では、移動体が等速直進運動によって移動すると仮定して、移動体の現在の速度と機首方向から将来位置を推定するようにしているが、移動体が雷雲などの進入禁止域を回避するために経路を変更すると、等速直進運動による移動ではなくなるため、将来位置の推定精度が悪化することがある。
【0005】
以下の特許文献2には、将来位置を予測する際、複数の運動モデルの中から適切な運動モデルを選択する目標追尾装置が開示されている。
この目標追尾装置では、センサにより観測された位置と追尾予測位置との差(残差)を用いて、複数の運動モデルの中から適切な運動モデルを選択するようにしている。
しかし、運動モデルを選択する際、雷雲などの進入禁止域の位置を考慮していないため、移動体が雷雲などの進入禁止域を回避する必要がある場合などには、将来位置の推定精度が悪化することがある。
【0006】
以下の特許文献3には、将来位置を予測する際、A*アルゴリズムによる最適経路探索方法を用いる目標追尾装置が開示されている。
A*アルゴリズムは、進入禁止域(障害物)を含む経路候補の移動空間をメッシュ上に細分化して、出発地点からゴール地点(または、経由点)までのノードを決定するものであり、経路を決定する際、移動体の運動を考慮せずに、格子点によって決定される。
このため、自然な経路を得るには、格子点の間隔を細かく設定する必要があり、多くの処理時間を要することがある。
【0007】
以下の非特許文献1には、低空飛行を行う飛翔体の操舵量をファジィ推論によって決定する技術が開示されている。
このファジィ推論では、地形を回避するのに必要な操舵量と、経由点に到達するのに必要な操舵量とを入力して、低空飛行を行う飛翔体の操舵量を決定している。
この技術の適用先として、目標がレーダ覆域外となり、観測値が得られない場合の長時間予測技術などが考えられる。
ただし、ファジィ推論におけるルールテーブルやメンバーシップ関数の設定は、試行錯誤による経験的な手法により行われることが多い。
このため、ルール数が増大するにしたがって設定作業が困難になることが想定される。また、将来位置の推定精度はファジィ推論のルールテーブルに依存する問題があった。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2985952号(段落番号[0024])
【特許文献2】特許第4348535号(段落番号[0006]、図1)
【特許文献3】特開2009−251729号公報(段落番号[0078]から[0086])
【非特許文献】
【0009】
【非特許文献1】野本著、「ファジー推論による低対地高度飛行の経路計画」、電子情報通信学会論文誌(B),Vol.J79,No.3 pp.183−190(1995).
【発明の概要】
【発明が解決しようとする課題】
【0010】
従来の目標追尾装置は以上のように構成されているので、移動体が雷雲などの進入禁止域を回避するために経路が変更された場合、移動体の将来位置や将来到達時刻の推定精度が劣化してしまうという課題があった。
【0011】
この発明は上記のような課題を解決するためになされたもので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる目標追尾装置及び目標追尾方法を得ることを目的とする。
【課題を解決するための手段】
【0012】
この発明に係る目標追尾装置は、追尾対象の移動体の観測値を用いて、現時刻における移動体の位置及び速度を算出する位置速度算出手段と、位置速度算出手段により算出された位置及び速度を用いて、指定時間後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、位置速度算出手段により算出された位置及び速度と指向用加速度算出手段により算出された経由点指向用の加速度を用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、回避用加速度算出手段により算出された進入回避用の加速度と位置速度算出手段により算出された位置及び速度を用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定手段とを設け、移動経路予測手段が、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定手段により特定された回避経路が移動体の移動経路であると予測する一方、判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定手段により特定された経由点指向経路が移動体の移動経路であると予測するようにしたものである。
【発明の効果】
【0013】
この発明によれば、追尾対象の移動体の観測値を用いて、現時刻における移動体の位置及び速度を算出する位置速度算出手段と、位置速度算出手段により算出された位置及び速度を用いて、指定時間後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、位置速度算出手段により算出された位置及び速度と指向用加速度算出手段により算出された経由点指向用の加速度を用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、回避用加速度算出手段により算出された進入回避用の加速度と位置速度算出手段により算出された位置及び速度を用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定手段とを設け、移動経路予測手段が、判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定手段により特定された回避経路が移動体の移動経路であると予測する一方、判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定手段により特定された経由点指向経路が移動体の移動経路であると予測するように構成したので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる効果がある。
【図面の簡単な説明】
【0014】
【図1】この発明の実施の形態1による目標追尾装置を示す構成図である。
【図2】この発明の実施の形態1による目標追尾装置の処理内容を示すフローチャートである。
【図3】式(2)の運動モデルを示す概念図である。
【図4】経由点指向方向を示す説明図である。
【図5】経由点指向経路を示す説明図である。
【図6】移動体の移動経路と到達時刻を示す説明図である。
【図7】回避用加速度算出部14の処理内容を示すフローチャートである。
【図8】水平方向の仮想経路の設定例を示す説明図である。
【図9】進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を示す説明図である。
【図10】回避用加速度算出部14により生成される回避加速度マップの一例を示す説明図である。
【図11】進入回避用の加速度に用いる加速度の組み合わせの選択例1を示す説明図である。
【図12】進入回避用の加速度に用いる加速度の組み合わせの選択例2を示す説明図である。
【図13】進入回避用の加速度に用いる加速度の組み合わせの選択例3を示す説明図である。
【図14】進入回避用の加速度に用いる加速度の組み合わせの選択例4を示す説明図である。
【図15】進入回避用の加速度に用いる加速度の組み合わせの選択例5を示す説明図である。
【図16】回避経路における回避地点と回避時刻を示す説明図である。
【図17】複数の回避地点がある場合の移動経路を示す説明図である。
【図18】この発明の実施の形態2による目標追尾装置を示す構成図である。
【図19】経路長が異なる回避経路を示す説明図である。
【図20】この発明の実施の形態3による目標追尾装置を示す構成図である。
【図21】この発明の実施の形態3による目標追尾装置の移動経路選択部34の処理内容を示すフローチャートである。
【図22】回避用加速度算出部31により算出された進入回避用加速度の一例を示す説明図である。
【発明を実施するための形態】
【0015】
実施の形態1.
図1はこの発明の実施の形態1による目標追尾装置を示す構成図である。
図1の目標追尾装置は、航空機、船舶、車両などの移動体を追尾する装置であるが、この実施の形態1では、移動体が航空機である例を説明する。
図1において、追尾処理部1は例えばカルマンフィルタなどの追尾フィルタを用いて、追尾対象の移動体の観測値(例えば、レーダやGPSなどのセンサから得られる移動体の位置などを示す観測情報)から、現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する処理を実施する。なお、追尾処理部1は位置速度算出手段を構成している。
【0016】
経路予測部2は移動体の経路を変更する加速度ベクトルukが考慮されている運動モデルに対して、追尾処理部1により算出された状態ベクトルxkを適用することで、移動体の移動経路を予測するとともに、移動体が当該移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
経由点位置情報格納部3は例えばRAMやハードディスクなどの記憶装置から構成されており、移動体の経由点の位置を示す経由点位置情報を格納している。
進入禁止域位置情報格納部4は例えばRAMやハードディスクなどの記憶装置から構成されており、雷雲などの進入禁止域(障害物)の位置を示す進入禁止域位置情報を格納している。
【0017】
経路予測部2の指向用加速度算出部11は追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後(指定時間後)に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する処理を実施する。なお、指向用加速度算出部11は指向用加速度算出手段を構成している。
経由点指向経路特定部12は追尾処理部1により算出された状態ベクトルxkと指向用加速度算出部11により算出された経由点指向用の加速度ベクトルukを上記運動モデルに適用することで、移動体が経由点に至るまでの経路である経由点指向経路を特定する処理を実施する。なお、経由点指向経路特定部12は経由点指向経路特定手段を構成している。
【0018】
進入禁止域衝突判定部13は経由点指向経路特定部12により特定された経由点指向経路上の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで、その経由点指向経路が進入禁止域内に入る経路であるか否かを判定する処理を実施する。なお、進入禁止域衝突判定部13は判定手段を構成している。
回避用加速度算出部14は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。なお、回避用加速度算出部14は回避用加速度算出手段を構成している。
【0019】
回避経路特定部15は回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する処理を実施する。なお、回避経路特定部15は回避経路特定手段を構成している。
移動経路予測部16は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する処理を実施する。
また、移動経路予測部16は移動体が予測した移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
なお、移動経路予測部16は移動経路予測手段及び到達時刻算出手段を構成している。
【0020】
図1の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、回避用加速度算出部14、回避経路特定部15及び移動経路予測部16のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、回避用加速度算出部14、回避経路特定部15及び移動経路予測部16の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
図2はこの発明の実施の形態1による目標追尾装置の処理内容を示すフローチャートである。
【0021】
次に動作について説明する。
追尾処理部1は、例えばカルマンフィルタなどの追尾フィルタを実装しており、レーダやGPSなどのセンサから追尾中の移動体の観測値(移動体の位置などを示す観測情報)を受けると、その観測値に基づいて現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する(図2のステップST1)。
ここでは、追尾処理部1がカルマンフィルタを実装している例を示しているが、追尾フィルタはカルマンフィルタに限るものではなく、他の公知のフィルタを実装するようにしてもよい。
【0022】
経路予測部2は、追尾処理部1が状態ベクトルxkを算出すると、下記の式(2)に示すように、移動体の経路を変更する加速度ベクトルukが考慮されている運動モデルに対して、その状態ベクトルxkを適用することで、移動体の移動経路を予測するとともに、移動体が当該移動経路上を移動して経由点に到達する時刻を算出する。
式(2)において、xkは時刻tkにおける状態ベクトル(位置・速度)、Φkは時刻tkから時刻tk+1に推移する際の既知の状態ベクトル推移行列、ukは運動座標における加速度ベクトル、Γkは加速度ベクトルukの運動座標から北基準直交座標に変換する際の既知の変換行列である。
【0023】
ここで、図3は式(2)の運動モデルを示す概念図である。
移動体は加速度ベクトルukが設定されることで、図3に示すように、直線的に移動している状態から、左旋回/右旋回を行う状態、上昇/下降を行う状態又は加速/減速を行う状態に変化する。
加速度ベクトルukは、レーダやGPSなどのセンサからは観測不可能な値であるので、この実施の形態1では、後述する指向用加速度算出部11及び回避用加速度算出部14が算出するようにしている。
以下、経路予測部2の処理内容を具体的に説明する。
【0024】
この実施の形態1では、移動体である航空機は、図4に示すように、経由点位置情報格納部3により格納されている経由点位置情報が示す経由点を目指して飛行しているものとする。
指向用加速度算出部11は、追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後(指定時間後)に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する(ステップST2)。
即ち、指向用加速度算出部11は、下記の式(3)〜(5)を計算することで、経由点指向用の加速度ベクトルukを算出する。
【0025】
ただし、vgは移動体の水平方向の加速度、wgは移動体の鉛直方向の加速度、θvは移動体の水平方向の指向角度、θwは移動体の鉛直方向の指向角度である。
【0026】
経由点指向経路特定部12は、指向用加速度算出部11が経由点指向用の加速度ベクトルukを算出すると、その経由点指向用の加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図5に示すように、移動体が経由点に至るまでの経路(予測時間Tmaxまでの経路)である経由点指向経路を特定する(ステップST3)。
即ち、経由点指向経路特定部12は、式(2)に基づいて、現時刻tkからTa秒後における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で移動するものとして、経由点に至るまでの経由点指向経路を特定する(図6を参照)。
【0027】
進入禁止域衝突判定部13は、経由点指向経路特定部12が経由点指向経路を特定すると、例えば時刻ΔT刻みで、その経由点指向経路上での移動体の位置を算出し、各時刻における移動体の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで、その経由点指向経路が進入禁止域内に入る経路であるか否かを判定する(ステップST4)。
【0028】
回避用加速度算出部14は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、現時刻tkにおける移動体の進行方向を基準とする7種類の運動モデル(直進、加速、減速、左旋回、右旋回、上昇、下降)を考慮して(図3を参照)、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する(ステップST5)。
以下、回避用加速度算出部14による進入回避用の加速度の算出処理を具体的に説明する。ただし、ここでは、説明の簡単化のため、移動体が加速及び減速を行わないものとする。
【0029】
図7は回避用加速度算出部14の処理内容を示すフローチャートである。
まず、回避用加速度算出部14は、移動体の性能から想定される水平方向の最大加速度を上限として、Δuステップで水平方向の加速度の候補を設定する。
回避用加速度算出部14は、水平方向の加速度の候補を複数設定すると、各加速度の候補で経由点指向経路を変更した場合の経路を仮想して、複数の仮想経路を生成する(図7のステップST21)。
図8は水平方向の仮想経路の設定例を示す説明図であり、図8では、3個の仮想経路を設定している例を示している。
【0030】
回避用加速度算出部14は、複数の仮想経路を生成すると、仮想経路毎に、当該仮想経路が進入禁止域内に入る経路であるか否かを判定する。
仮想経路が進入禁止域内に入る経路であるか否かの判定は、進入禁止域衝突判定部13と同様に、仮想経路上での各時刻における移動体の位置と進入禁止域位置情報格納部4により格納されている進入禁止域位置情報が示す進入禁止域の位置を比較することで判定することができる。
【0031】
回避用加速度算出部14は、当該仮想経路が進入禁止域内に入る経路である場合、移動体の性能から想定される鉛直方向の最大加速度を上限として、進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出する(図9を参照)。
即ち、回避用加速度算出部14は、移動体が進入禁止域内に進入する進入時刻Tc(図8の例では、2ΔTの時刻)を算出し、その進入時刻Tcにおいて、例えば、Δuステップで、鉛直方向の加速度を大きくすることで、当該仮想経路を鉛直方向に段階的に変更する。
回避用加速度算出部14は、当該仮想経路を鉛直方向に段階的に変更することで、当該仮想経路が進入禁止域内に入る経路から、進入禁止域内に入らない経路に変化する際の鉛直方向の加速度を探索する。
ただし、鉛直方向の最大加速度を設定しても、当該仮想経路が進入禁止域内に入る経路である場合、必要最小限の鉛直方向の加速度として、最大加速度を設定する。
【0032】
ここでは、当該仮想経路を鉛直方向に段階的に変更することで、必要最小限の鉛直方向の加速度を探索する例を示したが、下記の式(6)を計算することで、必要最小限の鉛直方向の加速度を算出するようにしてもよい。
ただし、Hは進入禁止域を回避するために必要な高度差、Tcは進入時刻(ΔTステップで設定した時刻の中で、進入禁止域内に入る最小の時刻)、wg,Hは高度差Hを回避するために必要な鉛直方向の加速度である。
【0033】
回避用加速度算出部14は、仮想経路毎に、最小限の鉛直方向の加速度を算出すると、当該仮想経路に対応する水平方向の加速度(当該仮想経路を生成する際に、経由点指向経路の変更に用いている水平方向の加速度の候補)と、当該仮想経路に対応する鉛直方向の加速度との組み合わせが得られるので、当該仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせを示す回避加速度マップを生成する(ステップST22)。
図10は回避用加速度算出部14により生成される回避加速度マップの一例を示す説明図である。
図10の例では、ABCDで囲まれている領域が進入禁止域であり、上記領域の外側の領域が進入禁止域外である。
【0034】
回避用加速度算出部14は、各仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせを示す回避加速度マップを生成すると、その回避加速度マップを利用して、各仮想経路に対応する水平方向及び鉛直方向の加速度の組み合わせの中から、進入禁止域内への進入を回避するために必要な進入回避用の加速度に用いる加速度の組み合わせを選択する。
具体的には、以下のようにして、進入回避用の加速度に用いる加速度の組み合わせを選択する。
【0035】
図11〜図15は進入回避用の加速度に用いる加速度の組み合わせの選択例を示す説明図である。
図において、vgは経由点指向用の加速度ベクトルukにおける水平方向の加速度、wgは経由点指向用の加速度ベクトルukにおける鉛直方向の加速度、v’gは水平方向の進入回避用加速度、w’gは鉛直方向の進入回避用加速度である。
この実施の形態1では、移動体が民間の航空機である等の場合、鉛直方向の加速度を変化させるよりも、水平方向の加速度を変化させることが、より自然な運航であるため(対地高度を一定とする運航)、水平方向を変化させる組み合わせを優先的に選択するものとする(鉛直方向の加速度が小さい組み合わせを優先的に選択するものとする)。
特に、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ水平方向の回避加速度を変化させる組み合わせを優先的に選択するものとする。
【0036】
[優先順位1]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ加速度であり、鉛直方向の進入回避用加速度w’gがゼロ(対地高度が一定)である組み合わせを選択する。
このケースは図11に示すケース1に該当し、水平方向の進入回避用加速度v’gは、下記の式(7)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvg(Δvgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する(ステップST23,ST24)。
このケースでは、対地高度を一定とするため、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0037】
[優先順位2]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度であり、鉛直方向の進入回避用加速度w’gが経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ加速度の組み合わせを選択する。
このケースは図12に示すケース2に該当し、水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する(ステップST23,ST24)。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(8)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwg(Δwgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する(ステップST25,ST26)。
【0038】
[優先順位3]
「経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を最大値にしても進入禁止域内となるが、その加速度vgと逆符号である条件下で、水平方向の回避加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと逆の符号を持つ加速度であり、鉛直方向の進入回避用加速度w’gがゼロ(対地高度が一定)である組み合わせを選択する。
このケースは図13に示すケース3に該当し、水平方向の進入回避用加速度v’gは、下記の式(9)に示すように、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvgを加えることで算出する(ステップST23,ST24)。
このケースでは、対地高度を一定とするため、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0039】
[優先順位4]
「いずれの進入回避用の加速度を選択しても、進入禁止域内となる場合」
水平方向の進入回避用加速度v’gが経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度であり、鉛直方向の進入回避用加速度w’gが経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度である組み合わせを選択する。
このケースは図14に示すケース4に該当し、水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する(ステップST23,ST27)。
v’g=vg,max
また、鉛直方向の進入回避用加速度w’gは、経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度wg,maxに設定する(ステップST23,ST27)。
w’g=wg,max
【0040】
ここでは、ケース4に該当する場合、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定し、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定する例を示したが、最大加速度に設定しても、進入禁止域内への進入を回避することができないので、追尾航跡が更新される次の時刻まで待って、進入回避用の加速度を設定する処理を再度実施するようにしてもよい。
あるいは、上記の経由点と異なる他の経由点について、進入回避用の加速度を設定する処理を実施するようにしてもよい。
【0041】
ここでは、水平方向の回避加速度を最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合(以下、「場合A」と称する)を優先順位2として、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同符号では、水平方向の回避加速度を最大値としても進入禁止域内となるが、その加速度vgと逆の符号で、水平方向の回避加速度を変化させることで進入禁止域外となる場合(以下、「場合B」と称する)を優先順位3としているが、優先順位を逆にして、場合Aを優先順位3にして、場合Bを優先順位2にしてもよい。
【0042】
また、優先順位3のケースに該当しない場合、直ちに、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定して、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定しているが、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと逆符号である条件下で、水平方向の回避加速度を最大加速度vg,maxに設定して、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合には、そのように進入回避用加速度を設定するようにしてもよい。
【0043】
ここでは、回避用加速度算出部14が、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号である条件下で、水平方向の回避加速度を変化させる組み合わせを優先的に選択するものを示したが、図15に示すように、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号によらず、変化が最小の加速度を水平方向の進入回避用加速度v’gとして優先的に設定するようにしてもよい。
即ち、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号と逆の符号を持つ最小限の値vg,LIMが、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgの符号と同じ符号を持つ最小限の値vg,LIMより小さい場合、逆の符号を持つ最小限の値vg,LIMから水平方向の進入回避用加速度v’gを算出するようにしてもよい。
また、ここでは、説明の簡単化のために、移動体が加速及び減速を行わないものとして説明したが、加速及び減速を含めて仮想経路を生成するようにしてもよいことは言うまでもない。
【0044】
回避経路特定部15は、回避用加速度算出部14が進入回避用の加速度(水平方向の進入回避用加速度v’g、鉛直方向の進入回避用加速度w’g)を算出すると、その進入回避用の加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図16に示すように、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する(図2のステップST6)。
【0045】
即ち、回避経路特定部15は、移動体が進入禁止域内に進入する進入時刻Tcを回避時刻Tvとして、加速度ベクトルukと状態ベクトルxkを式(2)の運動モデルに適用することで、回避時刻Tvにおける移動体の位置(図16では、「回避地点」と記述している)と、移動体の速度を算出する。
回避経路特定部15は、その回避地点と移動体の速度を追尾航跡の位置・速度とみなすことで、移動体の出発地点(または、前回の回避地点)から回避地点までの経路を回避経路として特定する。
【0046】
回避経路特定部15は、回避経路における移動体の各時刻の位置及び速度を指向用加速度算出部11にフィードバックすることで、指向用加速度算出部11が各時刻の位置及び速度から経由点用の加速度を算出し、進入禁止域衝突判定部13において、経由点指向経路特定部12により特定された経由点指向経路が進入禁止域内に入らない経路と判定されるまで、指向用加速度算出部11〜回避経路特定部15の間でループ処理を実施する。
【0047】
移動経路予測部16は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合(ステップST4)、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する(ステップST7)。
移動経路予測部16は、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測すると、式(2)に基づいて、現時刻tkからTa秒後(指定時間後)における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で経由点に向かうものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する(図6を参照)。
【0048】
また、移動経路予測部16は、その指向終了位置と経由点の間の距離Raと、その指向終了位置における移動体の速度Vaとから、移動体が経由点に到達する時刻Tpを算出する(ステップST8)。
【0049】
移動経路予測部16は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、図16に示すように、回避経路特定部15により特定された回避経路(現地点から回避地点までの経路)が移動体の移動経路であると予測する(ステップST9)。
移動経路予測部16は、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測すると、回避時刻Tvにおける回避地点から経由点までは等速直線運動で移動するものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
【0050】
移動経路予測部16は、図17に示すように、複数の回避地点がある場合、最終の回避地点から経由点に到達する時間と、複数の回避地点間の移動に要する時間(複数の回避地点における回避時刻Tvの差分)との和を求めることで、移動体が経由点に到達する時刻Tpを算出する(ステップST10)。
式(12)において、右辺第2項は式(11)の右辺と同じ意味であり、Tv,iはi−1番目からi番目の回避地点に到達するまでに要する時間である。ただし、i=1である場合に限り、現在位置から1番目の回避地点に到達するまでに要する時間である。
【0051】
図1の目標追尾装置は、移動体の追尾を継続する場合、ステップST1の処理に戻り、ステップST1〜ST10の処理を繰り返し実施する(ステップST11)。
【0052】
以上で明らかなように、この実施の形態1によれば、追尾対象の移動体の観測値を用いて、現時刻tkにおける移動体の位置及び速度を示す状態ベクトルxkを算出する追尾処理部1と、追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出する指向用加速度算出部11と、追尾処理部1により算出された状態ベクトルxkと指向用加速度算出部11により算出された経由点指向用の加速度ベクトルukを用いて、移動体が経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定部12と、経由点指向経路特定部12により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する進入禁止域衝突判定部13と、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設け、移動経路予測部16が、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部15により特定された回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測するように構成したので、移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができる効果を奏する。
【0053】
また、この実施の形態1によれば、移動経路予測部16が、移動体が予測した移動経路上を移動して経由点に到達する時刻を算出するように構成したので、移動体が経由点に到達する時刻を高精度に推定することができる効果を奏する。
【0054】
また、この実施の形態1によれば、回避用加速度算出部14が、水平方向及び鉛直方向の複数の加速度の組み合わせのうち、鉛直方向の加速度が小さい組み合わせを優先的に選択するように構成したので、例えば、移動体が民間の航空機である等の場合には、より自然な運航(対地高度を一定とする運航)に見合う進入回避用加速度を算出することができるようになり、その結果、移動体の将来位置や経由点到達時刻等の推定精度を高めることができる効果を奏する。
【0055】
なお、この実施の形態1では、指向用加速度算出部11が追尾処理部1により算出された状態ベクトルxkを用いて、現時刻tkからTa秒後に移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度ベクトルukを算出するものを示したが、式(2)の右辺第1項の状態ベクトルxkの速度成分については、追尾フィルタによって、レーダやGPSなどのセンサの観測値が示す位置から推定した速度を用いるようにしてもよい。また、移動体から得られる速度情報を用いるようにしてもよい。
【0056】
例えば、移動体が航空機である場合、航空機の機体から真対気速度が得られるので、風速データを加味することで対地速度が算出することができる。
このため、対地速度を状態ベクトルxkの速度成分として用いるようにしてもよい。
予め、目標進行予定の空間における風速データが既知の場合には、風速による状態ベクトルの速度変化を仮想経路の生成や、移動経路の予測に反映することが可能である。
【0057】
この実施の形態1では、回避用加速度算出部14が進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出するものを示したが、複数の回避地点が存在する場合、複数の回避地点の間で、進入回避用加速度が大きく異なるケースが発生することがある。
そこで、隣り合う回避地点で、進入回避用加速度が急激に変化する状況の発生を防止するために、予め加速度変化率パラメータΔαを設定し、時間方向に対して、Δα刻みで進入回避用加速度を変化させるようにしてもよい。
【0058】
この実施の形態1では、進入禁止域が1つである例を説明したが、進入禁止域が複数存在する場合でも、同様の処理を繰り返すことで、進入禁止域内への進入を回避することが可能である。
【0059】
実施の形態2.
上記実施の形態1では、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避用加速度算出部14が、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出し、回避経路特定部15が回避用加速度算出部14により算出された進入回避用の加速度を用いて、回避経路を特定するものを示したが、図19に示すように、進入禁止域が進行方向に対して奥行きがある形を成している場合、回避経路特定部15により特定される可能性がある回避経路(図中、実線の経路)が、他の回避経路(図中、点線の経路)よりも経路長が長くなる場合がある。
この実施の形態2では、進入禁止域が進行方向に対して奥行きがある形を成している場合でも、経路長が短い回避経路を特定することができるようにしている。
【0060】
図18はこの発明の実施の形態2による目標追尾装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
進入禁止域容積算出部21は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域における経由点指向経路の進行方向左側の容積を算出するとともに、その進入禁止域における経由点指向経路の進行方向右側の容積を算出する処理を実施する。なお、進入禁止域容積算出部21は容積算出手段を構成している。
【0061】
回避用加速度算出部22は進入禁止域容積算出部21により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。なお、回避用加速度算出部22は回避用加速度算出手段を構成している。
【0062】
図18の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部22、回避経路特定部15及び移動経路予測部16のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部22、回避経路特定部15及び移動経路予測部16の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
【0063】
次に動作について説明する。
進入禁止域容積算出部21は、進入禁止域衝突判定部13が上記実施の形態1と同様にして、経由点指向経路が進入禁止域内に入る経路であるか否かの判定処理を行うと、その判定結果が、経由点指向経路が進入禁止域内に入る経路である旨を示していれば、進入禁止域位置情報格納部4により格納されている進入禁止域位置情報を参照して、進入禁止域の形状を確認する。
進入禁止域容積算出部21は、進入禁止域の形状を確認すると、その進入禁止域と経由点指向経路特定部12により特定された経由点指向経路の位置関係を把握し、その経由点指向経路に対して、進入禁止域を進行方向左側のエリアと右側のエリアに分断する。
【0064】
進入禁止域容積算出部21は、進行方向左側のエリア及び右側のエリアの形状を把握することで、進行方向左側のエリアの容積と、進行方向右側のエリアの容積とを算出して、その算出結果を回避用加速度算出部22に出力する。
なお、正確な容積を算出することができない場合には、容積に相当する量(例えば、奥行きの長さ×幅)を算出し、容積に相当する量をエリアの容積として回避用加速度算出部22に出力する。
【0065】
回避用加速度算出部22は、進入禁止域容積算出部21が進行方向左側のエリアの容積と、進行方向右側のエリアの容積とを算出すると、容積が小さいエリア側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
ただし、容積が小さいエリア側の方向に移動体が移動することでは、進入禁止域内への進入を回避することができない場合、容積が大きいエリア側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
図19の例では、進行方向左側のエリアの容積が、進行方向右側のエリアの容積より小さいので、下記に示す優先順位にしたがって、進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する。
【0066】
[優先順位1]
「水平方向の回避加速度を進行方向左側に変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、下記の式(13)に示すように、進行方向左側において、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvg(Δvgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する。
この場合、鉛直方向の進入回避加速度を変化させる必要がないので、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0067】
[優先順位2]
「水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、進行方向左側の向きに最大加速度vg,maxを設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(14)に示すように、進行方向左側において、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwg(Δwgは0以上のオフセット値であって、事前に設定される固定値である)を加えることで算出する。
【0068】
[優先順位3]
「水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、水平方向の回避加速度を進行方向右側に変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、下記の式(15)に示すように、進行方向右側において、回避加速度マップの進入禁止域内に進入しない最小限の値vg,LIMに対して、回避量Δvgを加えることで算出する。
この場合、鉛直方向の進入回避加速度を変化させる必要がないので、鉛直方向の進入回避用加速度w’gはゼロとする。
w’g=0
【0069】
[優先順位4]
「水平方向の回避加速度を進行方向右側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合」
水平方向の進入回避用加速度v’gは、進行方向右側の向きに最大加速度vg,maxを設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、下記の式(16)に示すように、進行方向右側において、回避加速度マップの進入禁止域内に進入しない最小限の値wg,LIMに対して、回避量Δwgを加えることで算出する。
【0070】
[優先順位5]
「いずれの進入回避用の加速度を選択しても、進入禁止域内となる場合」
水平方向の進入回避用加速度v’gは、経由点指向用の加速度ベクトルukにおける水平方向の加速度vgと同じ符号を持つ最大加速度vg,maxに設定する。
v’g=vg,max
鉛直方向の進入回避用加速度w’gは、経由点指向用の加速度ベクトルukにおける鉛直方向の加速度wgと同じ符号を持つ最大加速度wg,maxに設定する。
w’g=wg,max
【0071】
優先順位5の場合、水平方向の進入回避用加速度v’gを最大加速度vg,maxに設定し、鉛直方向の進入回避用加速度w’gを最大加速度wg,maxに設定する例を示したが、最大加速度に設定しても、進入禁止域内への進入を回避することができないので、追尾航跡が更新される次の時刻まで待って、進入回避用の加速度を設定する処理を再度実施するようにしてもよい。
あるいは、上記の経由点と異なる他の経由点について、進入回避用の加速度を設定する処理を実施するようにしてもよい。
【0072】
ここでは、水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、鉛直方向の進入回避用加速度を変化させることで進入禁止域外となる場合(以下、「場合A」と称する)を優先順位2として、水平方向の回避加速度を進行方向左側に最大値にしても進入禁止域内となるが、水平方向の回避加速度を進行方向右側に変化させることで進入禁止域外となる場合(以下、「場合B」と称する)を優先順位3としているが、優先順位を逆にして、場合Aを優先順位3にして、場合Bを優先順位2にしてもよい。
【0073】
回避経路特定部15は、回避用加速度算出部22が進入回避用の加速度(水平方向の進入回避用加速度v’g、鉛直方向の進入回避用加速度w’g)を算出すると、上記実施の形態1と同様に、その進入回避用の加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、図19に示すように、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する。
これにより、回避用加速度算出部22により高い優先順位1,2で進入回避用加速度が算出されている場合、進入禁止域が進行方向に対して奥行きがある形を成していても、経路長が短い経路(図中、点線の経路)が回避経路となる。
移動経路予測部16の処理内容は、上記実施の形態1と同様であるため説明を省略する。
【0074】
以上で明らかなように、この実施の形態2によれば、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域における経由点指向経路の進行方向左側の容積を算出するとともに、その進入禁止域における経由点指向経路の進行方向右側の容積を算出する進入禁止域容積算出部21を設け、回避用加速度算出部22が、進入禁止域容積算出部21により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出するように構成したので、進入禁止域が進行方向に対して奥行きがある形を成している場合でも、経路長が短い回避経路を特定することができる効果を奏する。
【0075】
実施の形態3.
上記実施の形態1,2では、回避経路特定部15が1つの回避経路を特定し、経由点指向経路が進入禁止域内に入る経路であれば、移動経路予測部16が回避経路特定部15により特定された回避経路が移動体の移動経路であると予測するものを示したが、回避経路特定部15が複数の回避経路を特定し、経由点指向経路が進入禁止域内に入る経路であれば、移動経路予測部16が回避経路特定部15により特定された複数の回避経路が移動体の移動経路であると予測し、複数の移動経路の中で、経由点の到達時刻Tp又は進入回避用の加速度が最小となる移動経路を選択するようにしてもよい。
【0076】
図20はこの発明の実施の形態3による目標追尾装置を示す構成図であり、図において、図18と同一符号は同一または相当部分を示すので説明を省略する。
回避用加速度算出部31は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を算出する処理を実施する。
回避用加速度算出部31における進入回避用の加速度の算出方法は、図1の回避用加速度算出部14の算出方法と同一であってもよいし、図18の回避用加速度算出部22の算出方法と同一であってもよいが、回避用加速度算出部31では、進入回避用の加速度を複数算出する。
なお、回避用加速度算出部31は回避用加速度算出手段を構成している。
【0077】
回避経路特定部32は回避用加速度算出部31により算出された複数の進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る複数の回避経路を特定する処理を実施する。なお、回避経路特定部32は回避経路特定手段を構成している。
移動経路予測部33は進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部32により特定された複数の回避経路が移動体の移動経路であると予測する一方、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する処理を実施する。
また、移動経路予測部33は移動体が予測した移動経路上を移動して経由点に到達する時刻を算出する処理を実施する。
なお、移動経路予測部33は移動経路予測手段及び到達時刻算出手段を構成している。
【0078】
移動経路選択部34は移動経路予測部33により複数の回避経路が移動体の移動経路であると予測された場合、複数の移動経路の中で、移動経路予測部33により算出された経由点到達時刻Tp又は回避用加速度算出部31により算出された進入回避用の加速度が最小となる移動経路を選択する処理を実施する。なお、移動経路選択部34は移動経路選択手段を構成している。
【0079】
図20の例では、目標追尾装置の構成要素である追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部31、回避経路特定部32、移動経路予測部33及び移動経路選択部34のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、目標追尾装置の全部又は一部がコンピュータで構成されている場合、追尾処理部1、指向用加速度算出部11、経由点指向経路特定部12、進入禁止域衝突判定部13、進入禁止域容積算出部21、回避用加速度算出部31、回避経路特定部32、移動経路予測部33及び移動経路選択部34の処理内容を示すプログラムの全部又は一部をコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにしてもよい。
図21はこの発明の実施の形態3による目標追尾装置の移動経路選択部34の処理内容を示すフローチャートである。
【0080】
次に動作について説明する。
回避用加速度算出部31は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度(水平方向の進入回避用加速度v’g,鉛直方向の進入回避用加速度w’g)を複数算出する。
回避用加速度算出部31における進入回避用の加速度の算出方法は、特に問わないが、図1の回避用加速度算出部14と同様にして、例えば、図22に示すように、第1の進入回避用加速度(水平方向の進入回避用加速度v’g1,鉛直方向の進入回避用加速度w’g1)を算出し、図18の回避用加速度算出部22と同様にして、第2の進入回避用加速度(水平方向の進入回避用加速度v’g2,鉛直方向の進入回避用加速度w’g2)を算出する。
以降の説明では、説明の簡単化のため、図22に示すように、回避用加速度算出部31が、2つの進入回避用加速度(第1の進入回避用加速度、第2の進入回避用加速度)を算出するものとするが、3以上の進入回避用加速度を算出するようにしてもよい。
【0081】
回避経路特定部32は、回避用加速度算出部31が第1の進入回避用加速度と第2の進入回避用加速度を算出すると、図1の回避経路特定部15と同様に、第1の進入回避用加速度を加速度ベクトルukとして、その加速度ベクトルukと追尾処理部1により算出された状態ベクトルxkを式(2)の運動モデルに適用することで、移動体が進入禁止域内に入らずに経由点に至る第1の回避経路を特定する。
また、第2の進入回避用加速度を加速度ベクトルukとして、その加速度ベクトルukと状態ベクトルxkを式(2)の運動モデルに適用することで、移動体が進入禁止域内に入らずに経由点に至る第2の回避経路を特定する。
言うまでもないが、回避用加速度算出部31がN個の進入回避用加速度を算出していれば、回避経路特定部32がN個の回避経路を特定する。
【0082】
移動経路予測部33は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、図1の移動経路予測部16と同様に、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測する。
移動経路予測部33は、経由点指向経路特定部12により特定された経由点指向経路が移動体の移動経路であると予測すると、図1の移動経路予測部16と同様に、現時刻tkからTa秒後における指向終了位置を計算し、Ta秒以降は移動体が等速直線運動で経由点に向かうものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
また、移動経路予測部33は、図1の移動経路予測部16と同様に、その指向終了位置と経由点の間の距離Raと、その指向終了位置における移動体の速度Vaとから、移動体が経由点に到達する時刻Tpを算出する。
【0083】
移動経路予測部33は、進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、回避経路特定部32により特定された第1及び第2の回避経路(現地点から回避地点までの経路)のそれぞれが移動体の移動経路であると予測する。
移動経路予測部33は、回避経路特定部32により特定された第1及び第2の回避経路が移動体の移動経路であると予測すると、回避時刻Tvにおける回避地点から経由点までは等速直線運動で移動するものとして、任意の時刻における移動体の位置を算出することで、移動体の現在位置から経由点まで移動経路を最終的に特定する。
また、移動経路予測部33は、図1の移動経路予測部16と同様にして、移動体が第1の回避経路上を移動する場合の経由点到達時刻Tp,1を算出し、また、移動体が第2の回避経路上を移動する場合の経由点到達時刻Tp,2を算出する。
【0084】
移動経路選択部34は、移動経路予測部33により経由点指向経路が移動体の移動経路であると予測された場合、その移動経路と移動経路予測部33により算出された経由点到達時刻Tpを出力する。
一方、移動経路予測部33により第1及び第2の回避経路が移動体の移動経路であると予測された場合、移動体が第1の回避経路上を移動する場合の経由点到達時刻Tp,1と、移動体が第2の回避経路上を移動する場合の経由点到達時刻Tp,2との時刻差ΔTpを算出する(図21のステップST31)。
【0085】
移動経路選択部34は、経由点到達時刻の時刻差ΔTpを算出すると、その時刻差ΔTpを所定の閾値と比較し(ステップST32)、その時刻差ΔTpが所定の閾値より大きければ、経由点到達時刻Tpが最も早い移動経路(回避経路)を選択し、その移動経路と最も早い経由点到達時刻Tpを出力する(ステップST33)。
例えば、経由点到達時刻Tp,1が経由点到達時刻Tp,2より早ければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、経由点到達時刻Tp,2が経由点到達時刻Tp,1より早ければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0086】
移動経路選択部34は、経由点到達時刻の時刻差ΔTpが所定の閾値以下である場合、移動体が第1の回避経路上を移動する場合の鉛直方向の進入回避用加速度w’g1と、移動体が第2の回避経路上を移動する場合の鉛直方向の進入回避用加速度w’g2との加速度差Δw’gを算出する(ステップST34)。
【0087】
移動経路選択部34は、鉛直方向の加速度差Δw’gを算出すると、その加速度差Δw’gを所定の閾値と比較し(ステップST35)、その加速度差Δw’gが所定の閾値より大きければ、鉛直方向の進入回避用加速度w’gが最も小さい移動経路(回避経路)を選択し、その移動経路と経由点到達時刻Tpを出力する(ステップST36)。
例えば、進入回避用加速度w’g1が進入回避用加速度w’g2より小さければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、進入回避用加速度w’g2が進入回避用加速度w’g1より小さければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0088】
一方、加速度差Δw’gが所定の閾値以内である場合、移動体が第1の回避経路上を移動する場合の水平方向の進入回避用加速度v’g1と、移動体が第2の回避経路上を移動する場合の水平方向の進入回避用加速度v’g2とを比較し、水平方向の進入回避用加速度v’gが最も小さい移動経路(回避経路)を選択し、その移動経路と経由点到達時刻Tpを出力する(ステップST37)。
例えば、進入回避用加速度v’g1が進入回避用加速度v’g2より小さければ、第1の移動経路(第1の回避経路)と経由点到達時刻Tp,1を出力する。一方、進入回避用加速度v’g2が進入回避用加速度v’g1より小さければ、第2の移動経路(第2の回避経路)と経由点到達時刻Tp,2を出力する。
【0089】
以上で明らかなように、この実施の形態3によれば、移動経路予測部33により複数の回避経路が移動体の移動経路であると予測された場合、移動経路選択部34が、複数の移動経路の中で、移動経路予測部33により算出された経由点到達時刻Tp又は回避用加速度算出部31により算出された進入回避用の加速度が最小となる移動経路を選択するように構成したので、現実の運航に近いスムーズな移動経路を予測することができる効果を奏する。
【0090】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0091】
1 追尾処理部(位置速度算出手段)、2 経路予測部、3 経由点位置情報格納部、4 進入禁止域位置情報格納部、11 指向用加速度算出部(指向用加速度算出手段)、12 経由点指向経路特定部(経由点指向経路特定手段)、13 進入禁止域衝突判定部(判定手段)、14 回避用加速度算出部(回避用加速度算出手段)、15 回避経路特定部(回避経路特定手段)、16 移動経路予測部(移動経路予測手段、到達時刻算出手段)、21 進入禁止域容積算出部(容積算出手段)、22 回避用加速度算出部(回避用加速度算出手段)、31 回避用加速度算出部(回避用加速度算出手段)、32 回避経路特定部(回避経路特定手段)、33 移動経路予測部(移動経路予測手段、到達時刻算出手段)、34 移動経路選択部(移動経路選択手段)。
【特許請求の範囲】
【請求項1】
追尾対象の移動体の観測値を用いて、現時刻における上記移動体の位置及び速度を算出する位置速度算出手段と、上記位置速度算出手段により算出された位置及び速度を用いて、指定時間後に上記移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、上記位置速度算出手段により算出された位置及び速度と上記指向用加速度算出手段により算出された経由点指向用の加速度を用いて、上記移動体が上記経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、上記経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、上記判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、上記回避用加速度算出手段により算出された進入回避用の加速度と上記位置速度算出手段により算出された位置及び速度を用いて、上記移動体が上記進入禁止域内に入らずに上記経由点に至る回避経路を特定する回避経路特定手段と、上記判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記回避経路特定手段により特定された回避経路が上記移動体の移動経路であると予測する一方、上記判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、上記経由点指向経路特定手段により特定された経由点指向経路が上記移動体の移動経路であると予測する移動経路予測手段とを備えた目標追尾装置。
【請求項2】
移動体が移動経路予測手段により予測された移動経路上を移動して経由点に到達する時刻を算出する到達時刻算出手段を設けたことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
回避用加速度算出手段は、現時刻における移動体の進行方向を基準とする複数種類の運動モデルを考慮して、進入禁止域内への進入を回避するために必要な最小限の進入回避用の加速度を算出することを特徴とする請求項1または請求項2記載の目標追尾装置。
【請求項4】
回避用加速度算出手段は、移動体に対する水平方向の加速度の候補を複数用意し、各加速度の候補で経由点指向経路を変更した場合の経路を仮想して、当該仮想の経路が進入禁止域内に入る経路であれば、上記進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出する一方、当該仮想の経路が進入禁止域内に入らない経路であれば、上記鉛直方向の加速度をゼロに設定し、
上記移動体に対する水平方向及び鉛直方向の複数の加速度の組み合わせの中から、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を選択することを特徴とする請求項1から請求項3のうちのいずれか1項記載の目標追尾装置。
【請求項5】
回避用加速度算出手段は、仮想の経路が進入禁止域内に入る経路であれば、移動体が上記進入禁止域内に進入する進入時刻を算出し、その進入時刻と当該進入時刻における進入禁止域の高さを用いて、上記進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出することを特徴とする請求項4記載の目標追尾装置。
【請求項6】
回避用加速度算出手段は、水平方向及び鉛直方向の複数の加速度の組み合わせのうち、鉛直方向の加速度が小さい組み合わせを優先的に選択することを特徴とする請求項4または請求項5記載の目標追尾装置。
【請求項7】
回避用加速度算出手段は、水平方向及び鉛直方向の複数の加速度の組み合わせの中に、鉛直方向の加速度がゼロの組み合わせが1以上ある場合、鉛直方向の加速度がゼロの組み合わせの中から、水平方向の加速度が経由点指向用の加速度と同じ符号である組み合わせを優先的に選択することを特徴とする請求項4または請求項5記載の目標追尾装置。
【請求項8】
判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域における上記経由点指向経路の進行方向左側の容積及び進行方向右側の容積を算出する容積算出手段を設け、
回避用加速度算出手段は、上記容積算出手段により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する
ことを特徴とする請求項1または請求項2記載の目標追尾装置。
【請求項9】
回避用加速度算出手段が進入禁止域内への進入を回避するために必要な進入回避用の加速度を複数算出し、回避経路特定手段が上記回避用加速度算出手段により算出された複数の加速度を用いて、複数の回避経路を特定し、移動経路予測手段が上記回避経路特定手段により特定された複数の回避経路が移動体の移動経路であると予測する場合、
上記移動経路予測手段により予測された複数の移動経路の中で、到達時刻算出手段により算出された到達時刻又は上記回避用加速度算出手段により算出された進入回避用の加速度が最小となる移動経路を選択する移動経路選択手段を設けた
ことを特徴とする請求項2記載の目標追尾装置。
【請求項10】
位置速度算出手段が追尾対象の移動体の観測値を用いて、現時刻における上記移動体の位置及び速度を算出する位置速度算出処理ステップと、指向用加速度算出手段が上記位置速度算出処理ステップで算出された位置及び速度を用いて、指定時間後に上記移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出処理ステップと、経由点指向経路特定手段が上記位置速度算出処理ステップで算出された位置及び速度と上記指向用加速度算出処理ステップで算出された経由点指向用の加速度を用いて、上記移動体が上記経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定処理ステップと、判定手段が上記経由点指向経路特定処理ステップで特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定処理ステップと、回避用加速度算出手段が上記判定処理ステップで経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出処理ステップと、回避経路特定手段が上記回避用加速度算出処理ステップで算出された進入回避用の加速度と上記位置速度算出処理ステップで算出された位置及び速度を用いて、上記移動体が上記進入禁止域内に入らずに上記経由点に至る回避経路を特定する回避経路特定処理ステップと、移動経路予測手段が上記判定処理ステップで経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記回避経路特定処理ステップで特定された回避経路が上記移動体の移動経路であると予測する一方、上記判定処理ステップで経由点指向経路が進入禁止域内に入らない経路であると判定された場合、上記経由点指向経路特定処理ステップで特定された経由点指向経路が上記移動体の移動経路であると予測する移動経路予測処理ステップとを備えた目標追尾方法。
【請求項1】
追尾対象の移動体の観測値を用いて、現時刻における上記移動体の位置及び速度を算出する位置速度算出手段と、上記位置速度算出手段により算出された位置及び速度を用いて、指定時間後に上記移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出手段と、上記位置速度算出手段により算出された位置及び速度と上記指向用加速度算出手段により算出された経由点指向用の加速度を用いて、上記移動体が上記経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定手段と、上記経由点指向経路特定手段により特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定手段と、上記判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出手段と、上記回避用加速度算出手段により算出された進入回避用の加速度と上記位置速度算出手段により算出された位置及び速度を用いて、上記移動体が上記進入禁止域内に入らずに上記経由点に至る回避経路を特定する回避経路特定手段と、上記判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記回避経路特定手段により特定された回避経路が上記移動体の移動経路であると予測する一方、上記判定手段により経由点指向経路が進入禁止域内に入らない経路であると判定された場合、上記経由点指向経路特定手段により特定された経由点指向経路が上記移動体の移動経路であると予測する移動経路予測手段とを備えた目標追尾装置。
【請求項2】
移動体が移動経路予測手段により予測された移動経路上を移動して経由点に到達する時刻を算出する到達時刻算出手段を設けたことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
回避用加速度算出手段は、現時刻における移動体の進行方向を基準とする複数種類の運動モデルを考慮して、進入禁止域内への進入を回避するために必要な最小限の進入回避用の加速度を算出することを特徴とする請求項1または請求項2記載の目標追尾装置。
【請求項4】
回避用加速度算出手段は、移動体に対する水平方向の加速度の候補を複数用意し、各加速度の候補で経由点指向経路を変更した場合の経路を仮想して、当該仮想の経路が進入禁止域内に入る経路であれば、上記進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出する一方、当該仮想の経路が進入禁止域内に入らない経路であれば、上記鉛直方向の加速度をゼロに設定し、
上記移動体に対する水平方向及び鉛直方向の複数の加速度の組み合わせの中から、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を選択することを特徴とする請求項1から請求項3のうちのいずれか1項記載の目標追尾装置。
【請求項5】
回避用加速度算出手段は、仮想の経路が進入禁止域内に入る経路であれば、移動体が上記進入禁止域内に進入する進入時刻を算出し、その進入時刻と当該進入時刻における進入禁止域の高さを用いて、上記進入禁止域内への進入を回避するために必要な最小限の鉛直方向の加速度を算出することを特徴とする請求項4記載の目標追尾装置。
【請求項6】
回避用加速度算出手段は、水平方向及び鉛直方向の複数の加速度の組み合わせのうち、鉛直方向の加速度が小さい組み合わせを優先的に選択することを特徴とする請求項4または請求項5記載の目標追尾装置。
【請求項7】
回避用加速度算出手段は、水平方向及び鉛直方向の複数の加速度の組み合わせの中に、鉛直方向の加速度がゼロの組み合わせが1以上ある場合、鉛直方向の加速度がゼロの組み合わせの中から、水平方向の加速度が経由点指向用の加速度と同じ符号である組み合わせを優先的に選択することを特徴とする請求項4または請求項5記載の目標追尾装置。
【請求項8】
判定手段により経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域における上記経由点指向経路の進行方向左側の容積及び進行方向右側の容積を算出する容積算出手段を設け、
回避用加速度算出手段は、上記容積算出手段により算出された進行方向左側の容積及び進行方向右側の容積のうち、容積が小さい側の方向に移動体が移動することで、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する
ことを特徴とする請求項1または請求項2記載の目標追尾装置。
【請求項9】
回避用加速度算出手段が進入禁止域内への進入を回避するために必要な進入回避用の加速度を複数算出し、回避経路特定手段が上記回避用加速度算出手段により算出された複数の加速度を用いて、複数の回避経路を特定し、移動経路予測手段が上記回避経路特定手段により特定された複数の回避経路が移動体の移動経路であると予測する場合、
上記移動経路予測手段により予測された複数の移動経路の中で、到達時刻算出手段により算出された到達時刻又は上記回避用加速度算出手段により算出された進入回避用の加速度が最小となる移動経路を選択する移動経路選択手段を設けた
ことを特徴とする請求項2記載の目標追尾装置。
【請求項10】
位置速度算出手段が追尾対象の移動体の観測値を用いて、現時刻における上記移動体の位置及び速度を算出する位置速度算出処理ステップと、指向用加速度算出手段が上記位置速度算出処理ステップで算出された位置及び速度を用いて、指定時間後に上記移動体の向きを経由点に指向させる際に必要な経由点指向用の加速度を算出する指向用加速度算出処理ステップと、経由点指向経路特定手段が上記位置速度算出処理ステップで算出された位置及び速度と上記指向用加速度算出処理ステップで算出された経由点指向用の加速度を用いて、上記移動体が上記経由点に至るまでの経路である経由点指向経路を特定する経由点指向経路特定処理ステップと、判定手段が上記経由点指向経路特定処理ステップで特定された経由点指向経路が進入禁止域内に入る経路であるか否かを判定する判定処理ステップと、回避用加速度算出手段が上記判定処理ステップで経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出処理ステップと、回避経路特定手段が上記回避用加速度算出処理ステップで算出された進入回避用の加速度と上記位置速度算出処理ステップで算出された位置及び速度を用いて、上記移動体が上記進入禁止域内に入らずに上記経由点に至る回避経路を特定する回避経路特定処理ステップと、移動経路予測手段が上記判定処理ステップで経由点指向経路が進入禁止域内に入る経路であると判定された場合、上記回避経路特定処理ステップで特定された回避経路が上記移動体の移動経路であると予測する一方、上記判定処理ステップで経由点指向経路が進入禁止域内に入らない経路であると判定された場合、上記経由点指向経路特定処理ステップで特定された経由点指向経路が上記移動体の移動経路であると予測する移動経路予測処理ステップとを備えた目標追尾方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図21】
【図22】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−149997(P2012−149997A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−8740(P2011−8740)
【出願日】平成23年1月19日(2011.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月19日(2011.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]