
目標追尾装置
【課題】航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得る。
【解決手段】観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成され、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。
【解決手段】観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成され、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ等のセンサシステムにおいて、センサからの目標位置の観測値を使って目標の航跡を生成する際の相関を多次元的に解く技術を用いる目標追尾装置に関し、より具体的には、航跡に対して複数のモデルを適用し、各モデルからの航跡候補を生成し、多次元相関決定を実施し、尤もらしいモデルに対応した航跡を導出することで、モデルとして複数の運動モデルや観測モデルを用意することで、目標の多種多様な運動や目標信号の高度・輝度等が不安定となる観測条件に対応して、精度のよい追尾を実現する多目標追尾装置に関する。
【背景技術】
【0002】
単一のモデルを適用し、多次元的に相関を解く技術として、複数サンプリング時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムである、複数フレーム割当法がある(例えば、特許文献1、および非特許文献1参照)。この複数フレーム割当法では、既存航跡とNサンプリング時刻に跨る観測値との相関決定を、N次元の割当問題に変換して解いている(ただし、Nは、2以上の整数)。
【0003】
N次元割当問題は、下式(1)の目的関数を最小化する2値変数Zi1・・・ziN+1を決定するものである。
【0004】
【数1】

【0005】
ここで、上式(1)におけるCi1・・・CiN+1は、既存航跡および観測値i1・・・iN+1から航跡を生成するのにかかるコストであり、通常、航跡尤度の逆数の対数値を使用する。また、2値変数Zi1・・・ziN+1は、下式(2)のとおりである。
【0006】
【数2】
【0007】
また、これら2値変数は、任意のi1については下式(3−1)、任意のi2〜iNについては下式(3−2)、そして、任意のiN+1については下式(3−3)の制約条件がある。
【0008】
【数3】
【0009】
ここで、nフレーム目における航跡候補は、前回((n−1)フレーム目)の航跡候補xn−1(+)を元に算出された予測値xn(−)から、相関関係にある当該フレームの観測値を割り当てることで更新される。ここでは、一例として、線形カルマンフィルタを想定した場合の航跡候補の更新、および残差共分散行列を用いた相関判定について、以下に示す。
【0010】
(n−1)フレームからnフレームにおける推移行列をΦ(n−1)とすると、予測値xn(−)は、下式(4)となる。
【0011】
【数4】
【0012】
また、(n−1)フレームでの平滑誤差共分散行列Pn−1(+)、および駆動雑音行列Q(n−1)から、予測誤差共分散行列Pn(−)は、下式(5)で求められる。
【0013】
【数5】
【0014】
また、残差共分散行列Snは、観測誤差共分散行列Bnを用いて、下式(6)で求められる。
【0015】
【数6】
【0016】
残差共分散行列Snを用いて、下式(7)が成立する場合には、航跡候補と観測値z(n)は、相関があると判定する。ここで、dは、ゲートサイズであり、観測値の持つ自由度Mのカイ2乗分布表から定められる事前設定パラメータである。
【0017】
【数7】
【0018】
nフレームにおける航跡候補i(尤度γi)が、(n−1)フレームにおける航跡候補l(尤度γl)から生成されたとする。この場合、探知確率PD、ゲート捕捉率PGおよび航跡候補生成における観測値との相関度gi、lを用いて、探知抜けによる航跡候補の生成におけるコストγi、o、観測値による航跡候補の生成におけるコストγi、1は、下式(8)となる。すなわち、更新された各航跡候補の尤度は、下式(8)により更新される。
【0019】
【数8】
【0020】
複数のモデルを適用して航跡の予測値を算出し、得られた観測値の各モデルで更新した航跡の予測値の適合度を用いて航跡を更新することで、目標の多種多様な運動や目標信号の高度・輝度等が不安定となる観測条件に対応する技術として、多重モデル方式がある。
【0021】
多重モデル方式の例として、各運動モデルで表した運動が、実際の目標の運動と一致している適合度(以下、モデル信頼度と呼ぶ)で、各観測フレームでの各追尾フィルタの出力である平滑値および平滑誤差共分散行列などを、重み付け平均しながら、複数の追尾フィルタを並行に使用する方式が提案されている(例えば、特許文献2、非特許文献2参照)。
【先行技術文献】
【特許文献】
【0022】
【特許文献1】特開2007−212244号公報
【特許文献2】特開2002−328162号公報
【非特許文献】
【0023】
【非特許文献1】A.B.Poore and A.J.RobertsonIII "A New Lagrangian Relaxation Based Algorithm for a Class of Multidimensional Assignment Problems" Computational Optimization and Applications, 8, 129-150, 1997.
【非特許文献2】YAAKOV BAR-SHALOM, X.RONG LI, THIAGALINGAM KIRUBBARAJAN "Estimation with Applications to Tracking and Navigation" A Wiley-Interscience Publication JOHN WILEY & SONS,INC., P441-457.
【発明の概要】
【発明が解決しようとする課題】
【0024】
しかしながら、従来技術には、以下のような課題がある。
従来の複数フレーム割当法を用いた目標追尾装置は、航跡と観測値の割当を1フレーム前の航跡候補と当該観測フレームの観測値との割当により更新していた。
【0025】
また、従来の多重モデル方式を適用した場合、各観測フレームでの航跡候補更新において、複数のモデルによる遷移を考慮することとなる。この結果、航跡候補が増大することによる多次元相関決定の解精度の劣化や演算時間増大、また、この航跡候補の増大にあわせて航跡候補の予測値が増大し、目標信号でない不要信号からなる観測値との相関が多く発生することによる誤相関が多く発生する課題があった。
【0026】
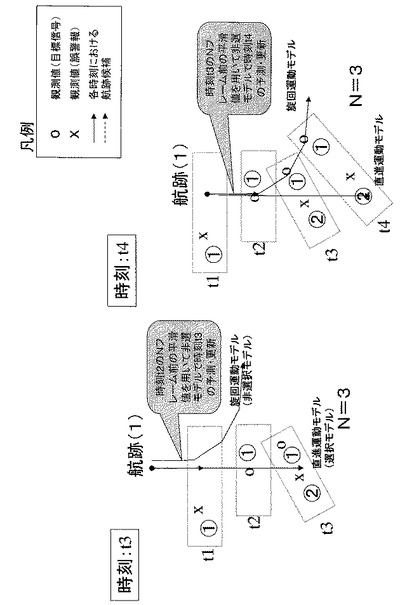
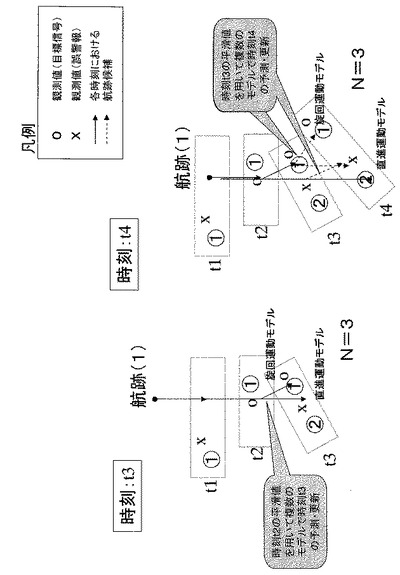
図9は、従来の多重モデル方式の問題点を説明するための図である。より具体的には、時刻t3からt4に進む際に、t3における平滑値を用いて複数のモデル(図9では直進運動モデルと旋回運動モデル)により予測値を算出した場合の、航跡候補の増大と誤相関の様子を示している。
【0027】
本発明は、前記のような課題を解決するためになされたものであり、航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0028】
本発明に係る目標追尾装置は、センサからの観測値を入力してNフレーム分(Nは2以上の整数)の観測値を格納し、指定フレームでの既存航跡と観測値との割当を行う観測値管理手段と、複数のモデルから当該航跡の前回処理で選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする航跡モデル参照部と、選択モデルでの航跡の予測値を算出し、観測値管理手段による割当結果から航跡候補を生成してコストを算出し、選択モデルに対応するコスト行列を求める航跡候補(選択モデル)コスト行列算出手段と、Nフレーム前に算出された平滑値から(N−1)フレーム前の予測値を算出し、(N−1)フレーム前の観測値との割当から(N−1)フレーム前における航跡候補を生成してコスト、平滑値を算出し、次に、(N−1)フレーム前における航跡候補について算出した平滑値から(N−2)フレーム前の予測値を算出し、(N−2)フレーム前の観測値との割当から(N−2)フレーム前における航跡候補を生成してコスト、平滑値を算出し、以下、(N−3)フレーム前から今回観測フレームまで同様の処理を繰り返し、非選択モデルに対応するコスト行列を求める航跡候補(非選択モデル)コスト行列算出手段と、選択モデルに対応して算出されたコスト行列と、非選択モデルに対応して算出されたコスト行列とから、同一観測値割当となった航跡候補のうち最小コストを有する航跡候補とコストを抽出して新たなコスト行列を生成し、新たなコスト行列を用いて多次元相関決定を実施する多重モデル対応多次元相関決定手段と、多次元相関決定により抽出された最小コストを有する航跡候補の組み合わせから各航跡のモデルを決定するとともに、今回観測フレームにおける平滑値を算出し格納する航跡管理手段とを備えたものである。
【発明の効果】
【0029】
本発明に係る目標追尾装置によれば、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施することにより、航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得ることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の実施の形態1における目標追尾装置の構成図である。
【図2】本発明の実施の形態1の目標追尾装置における、kフレーム目での一連処理を示すフローチャートである。
【図3】本発明の実施の形態1における目標追尾装置で割り当てられた観測値、および生成されるコスト行列の説明図である。
【図4】本発明の実施の形態1の目標追尾装置において、2つの異なるモデルで生成されたコスト行列を利用して、多次元相関決定部に入力するコスト行列を決定する方法の説明図である。
【図5】本発明の実施の形態1における目標追尾装置により、従来の問題点が解決されたことを説明するための図である。
【図6】本発明の実施の形態2における目標追尾装置の構成図である。
【図7】本発明の実施の形態2における多重モデル対応多次元相関決定手段の一連処理の流れを示すフローチャートである。
【図8】本発明の実施の形態2の目標追尾装置において、2つの既存航跡が存在し2つの運動モデルを利用して航跡候補を生成した場合に生成されるコスト行列の組み合わせを示す説明図である。
【図9】従来の多重モデル方式の問題点を説明するための図である。
【発明を実施するための形態】
【0031】
以下、本発明の目標追尾装置の好適な実施の形態につき図面を用いて説明する。
【0032】
実施の形態1.
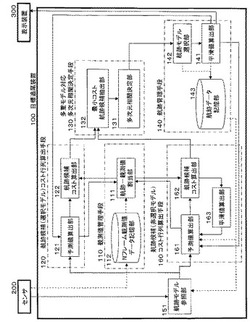
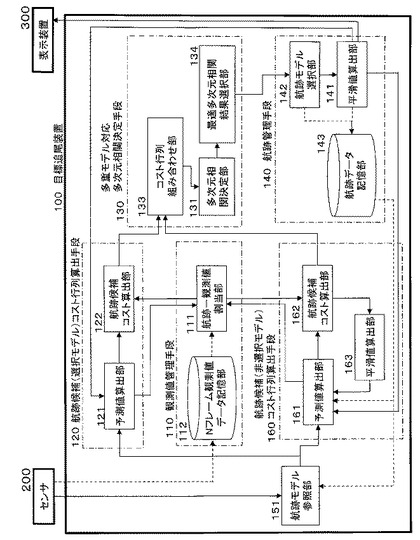
図1は、本発明の実施の形態1における目標追尾装置の構成図である。本実施の形態1における目標追尾装置100は、観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成される。
【0033】
観測値管理手段110は、航跡−観測値割当部111、およびNフレーム観測値データ記憶部112を含む。また、航跡候補(選択モデル)コスト行列算出手段120は、予測値算出部121、および航跡候補コスト算出部122を含む。また、多重モデル対応多次元相関決定手段130は、多次元相関決定部131、および最小コスト航跡候補抽出部132を含む。
【0034】
また、航跡管理手段140は、平滑値算出部141、航跡モデル選択部142、および航跡データ記憶部143を含む。さらに、航跡候補(非選択モデル)コスト行列算出手段160は、予測値算出部161、航跡候補コスト算出部162、および平滑値算出部163を含む。
【0035】
図1において、観測値管理手段110は、以下の処理を行う。Nフレーム観測値データ記憶部112には、センサ200からの観測値がNフレーム分蓄積される。また、航跡−観測値割当部111は、航跡候補(選択モデル)コスト行列算出手段120内の予測値算出部121、および航跡候補(非選択モデル)コスト行列算出手段160内の予測値算出部161でそれぞれ算出された航跡候補の予測値に基づいて、航跡候補と当該観測フレームにおける観測値との割当を行う。
【0036】
また、航跡選択モデル参照部151は、センサ200から観測値が入力された際に、当該航跡の前回選択されたモデルを、航跡データ記憶部143に記憶された航跡データから参照し、当該航跡の当該観測フレームのコスト行列算出における選択モデルあるいは非選択モデルのいずれであるかを決定する。
【0037】
また、航跡候補(選択モデル)コスト行列算出手段120は、以下の処理を行う。予測値算出部121は、当該航跡の前回選択されたモデルにより、当該観測フレームでの予測値を算出する。そして、航跡候補コスト算出部122は、観測値管理手段110により割り当てられた観測値により、航跡候補を生成し、コストを算出する。
【0038】
また、航跡候補(非選択モデル)コスト行列算出手段160は、以下の処理を行う。予測値算出部161は、当該航跡の前回選択されたモデルのNフレーム前における平滑値を、平滑値算出部163から取得し、その平滑値を元に(N−1)フレーム前での予測値を算出する。そして、航跡候補コスト算出部162は、(N−1)フレーム前での観測値との割当から航跡候補を生成し、コストを算出する。
【0039】
なお、(N−1)フレーム前での予測値の算出に当たっては、以下のような2通りのその他の方法を用いてもよい。
航跡候補(非選択モデル)コスト行列算出手段160は、選択モデルでのNフレーム前に算出された平滑値および非選択モデルでのNフレーム前に算出された平滑誤差共分散を用いて、(N−1)フレーム前の予測値を算出することができる。
【0040】
また、航跡候補(非選択モデル)コスト行列算出手段160は、選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストと、非選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストを用いて、Nフレーム前での平滑値、平滑誤差共分散を算出し、この算出結果を用いて(N−1)フレーム前の予測値を算出することもできる。
【0041】
続いて、予測値算出部161は、当該モデルで航跡候補の予測値を算出する。そして、航跡候補コスト算出部162は、(N−2)フレーム前の観測値との割当から航跡候補を生成し、コストを算出する。これを当該観測フレームまで繰り返し、当該観測フレームにおける前回選択されなかったモデルでの航跡候補の生成および各航跡候補のコストの算出を行う。
【0042】
また、多重モデル対応多次元相関決定手段130は、以下の処理を行う。最小コスト航跡候補抽出部132は、航跡候補(選択モデル)コスト行列算出手段120および航跡候補(非選択モデル)コスト行列算出手段160から導出された各航跡候補の観測値割当とコストからなるコスト行列から、同一航跡候補の観測値割当の中からコストが最小となる航跡候補とコストを抽出する。さらに、多次元相関決定部131は、抽出されたコストからコスト行列を生成し、多次元相関決定を行う。
【0043】
また、航跡管理手段140は、以下の処理を行う。航跡モデル選択部142は、多重モデル対応多次元相関決定手段130より抽出された各航跡候補が、どの運動モデルから更新されたかを選択する。さらに、平滑値算出部141は、割り当てられた観測値から平滑値を算出する。そして、航跡モデル選択部142による選択結果および平滑値算出部141で算出された平滑値は、航跡データとして航跡データ記憶部143に格納される。また、航跡の平滑値は、表示装置300により表示される。
【0044】
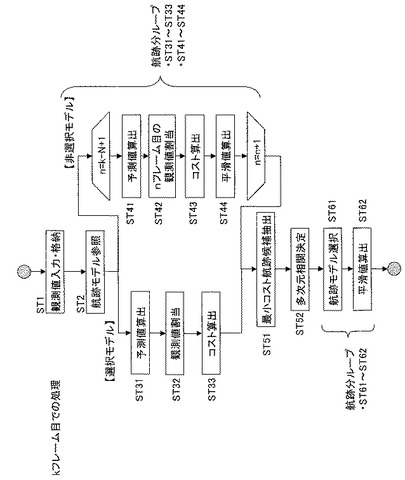
次に、図1の構成を備えた目標追尾装置における、kフレーム目での一連の処理について、フローチャートを用いて説明する。図2は、本発明の実施の形態1の目標追尾装置における、kフレーム目での一連処理を示すフローチャートである。
【0045】
まず始めに、観測値管理手段110において、センサ200から得られた観測値を、Nフレーム観測値データ記憶部112に格納する(ステップST1)。次に、航跡選択モデル参照部151において、各航跡について前回処理時に選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする(ステップST2)。
【0046】
各航跡の選択モデルについては、ステップST31〜ステップST33までの処理を行う。まず、航跡候補(選択モデル)コスト行列算出手段120の予測値算出部121において、前回算出した平滑値から予測値を、上式(4)を用いて算出する(ステップST31)。
【0047】
以降、予測値、平滑値、各種共分散の算出において、線形カルマンフィルタを用いた例を、数式を用いて説明する。観測値管理手段110の航跡−観測値割当部111において、予測値と入力した当該観測フレームでの観測値とから、航跡と観測値の割当を、上式(5)〜(7)に示す相関により実施する(ステップST32)。
【0048】
次に、航跡候補(選択モデル)コスト行列算出手段120の航跡候補コスト算出部122において、ステップST32での航跡観測値割当から航跡候補を生成し、航跡候補のコストを、上式(8)に示す予測値と観測値との相関度から算出し、選択モデルでの航跡候補とコスト値から構成されるコスト行列を生成する(ステップST33)。
【0049】
一方、各航跡の非選択モデルについては、ステップST41〜ステップST44までの処理を行う。kフレーム目の処理において、(N−1)フレーム前であるn=k−N+1から、現在の観測フレームであるn=kまでについて、予測値算出、観測値割当、コスト算出、平滑化算出の各ステップST41〜ST44を繰り返し行う。
【0050】
まず、航跡候補(非選択モデル)コスト行列算出手段160の予測値算出部161において、当該航跡のNフレーム前の平滑値を航跡データ記憶部143から取得し、nフレーム目の予測値(すなわち、最初は、(N−1)フレーム前での予測値に相当)を算出する(ステップST41)。なお、Nフレーム前の平滑値として、前回選択モデルでの平滑値、当該運動モデルの平滑値、もしくは、前回選択モデルと当該運動モデルのコスト比による混合値のいずれを利用してもよい。
【0051】
ここで、各値を用いての予測値の算出について、以下に説明する。
最新フレームがkフレーム目、運動モデルがs1、s2、・・・と複数あり、s1が前回選択モデルとした場合に、運動モデルs2で航跡候補を生成する場合について、下式(9)〜(11)を考える。s3、s4、・・・と3個以上の運動モデルがある場合についても同様である。
【0052】
【数9】
【0053】
ここで、xk−N(+)、Pk−N(+)は、下式(12)、(13)のいずれかである。
【0054】
【数10】
【0055】
ここで、1モデル間の推移のみを考慮する場合、xk−N(+)、Pk−N(+)は、下式(14)となる。
【0056】
【数11】
【0057】
また、全モデルの推移を考慮する場合、xk−N(+)、Pk−N(+)は、下式(15)となる。
【0058】
【数12】
【0059】
また、モデルとして、観測モデルを複数利用する場合は、上記においては、推移行列がΦsi(i=1、・・・、imax)となっていたのに対し、観測行列がHsj(j=1、・・・、imax)となる(以降の式においても同様である)。
【0060】
図2の説明に戻って、観測値管理手段110の航跡−観測値割当部111において、ステップST41で算出した予測値と(N−1)フレーム前での観測値とから、nフレーム目の航跡候補と観測値の割当を実施する(ステップST42)。
【0061】
ここで、航跡候補と観測値の相関判定について、以下に説明する。
k−N+1フレームにおけるある観測値z(k−N+1)が、航跡候補xk−Nが運動モデルs2で更新された場合に相関があるか否かの判定は、下式(16)により実施することとなる。
【0062】
【数13】
【0063】
また、図2の説明に戻って、航跡候補(非選択モデル)コスト行列算出手段160の航跡候補コスト算出部162において、ステップST42での航跡観測値割当から(N−1)フレーム前での航跡候補を生成し、航跡候補のコストを予測値と観測値の相関度から算出する(ステップST43)。
【0064】
ここで、航跡候補の尤度の算出について、以下に説明する。
k−Nフレームでの航跡候補lと、k−N+1フレームでの運動モデルs2と相関が取れた観測値とで生成された航跡候補iの航跡尤度は、下式(17)で表される。ここで、gi,lは、相関がとれた観測値と航跡候補lとの相関度である上式(16)の左辺の項による。
【0065】
【数14】
【0066】
再び図2の説明に戻って、平滑値算出部163において、(N−1)フレーム前での各航跡候補の平滑値、平滑誤差共分散、およびゲインを算出する(ステップST44)。この算出は、下式(18)〜(20)に従って行う。
【0067】
【数15】
【0068】
予測値算出部161において、ステップST44で算出した(N−1)フレーム前の平滑値から、予測値、予測誤差共分散、残差共分散を、モデルを固定して、上式(4)〜(6)を用いて算出し(ステップST41)、ステップST44までの処理を最新観測フレームまで繰り返し、非選択モデルでの航跡候補とコスト値から構成されるコスト行列を生成する。
【0069】
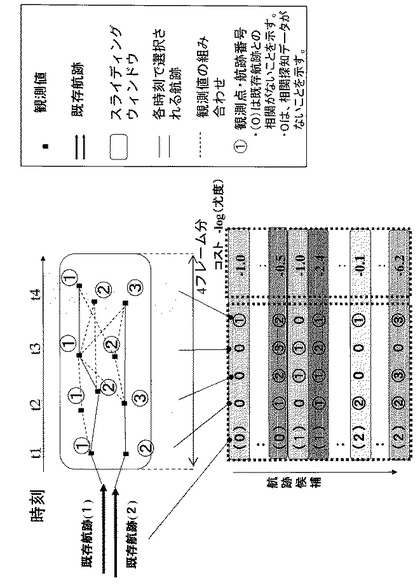
次に、ステップST51以降の多重モデル対応多次元相関決定手段130、および航跡管理手段140による処理について説明する。図3は、本発明の実施の形態1における目標追尾装置で割り当てられた観測値、および生成されるコスト行列の説明図である。より具体的には、既存の航跡に各フレームで割り当てられた観測値、および探知抜けからなる航跡候補と対応するコストからなるコスト行列の例を示している。
【0070】
多重モデル対応多次元相関決定手段130の最小コスト航跡候補抽出部132は、同一航跡から生成されたモデルが異なる航跡候補で、各フレームにおいて割当られた観測値の組み合わせが同一となる航跡候補が存在した場合、コストが最小となるモデルの航跡候補を抽出し、対応するコストからなるコスト行列を生成する(ステップST51)。
【0071】
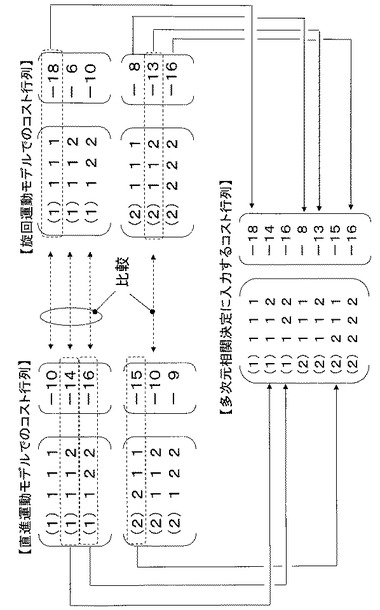
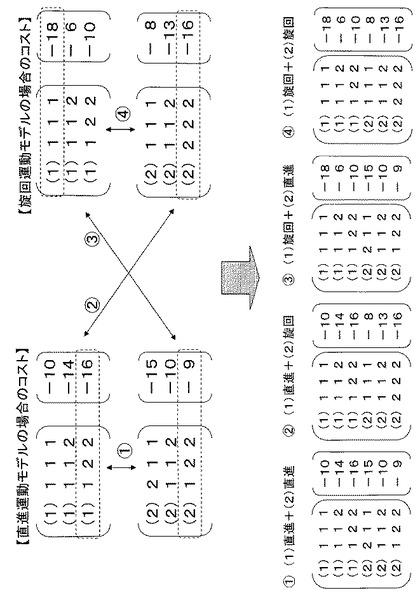
図4は、本発明の実施の形態1の目標追尾装置において、2つの異なるモデルで生成されたコスト行列を利用して、多次元相関決定部131に入力するコスト行列を決定する方法の説明図である。ここで、同じ観測値割当でコストが同一となった場合には、前回までの選択運動モデルおよび航跡尤度と今回の航跡候補尤度とを比較し、選択する。比較方法としては、以下のようなものがある。
[比較方法1]前回選択モデルから導出した航跡候補のコストを利用する。
[比較方法2]前回フレームまでの観測値割当てにおけるコストからの減分が最も大きいコストを利用する。
[比較方法3]まず、比較方法2により実施し、区別がつかない場合には、比較方法1によりコストを決定する。
多次元相関決定部131において、先のステップST51で、図4に示したような方法で生成されたコスト行列を入力として、多次元相関決定を実施する(ステップST52)。
【0072】
次に、航跡管理手段140の航跡モデル選択部142は、ステップST52で選択された航跡候補のモデルを航跡のモデルとして、航跡データ記憶部143に格納する(ステップST61)。さらに、平滑値算出部141は、選択された航跡候補における各フレームの平滑値を算出し、航跡データ記憶部143に格納する(ステップST62)。
【0073】
図5は、本発明の実施の形態1における目標追尾装置により、従来の問題点が解決されたことを説明するための図である。先の図9で指摘したような航跡候補の増大と誤相関が多発するような状況においても、本実施の形態1の発明によれば、図5に示すように、これらの抑圧と正解航跡の選択が可能となる。
【0074】
以上のように、実施の形態1によれば、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。これにより、航跡候補と観測値の割当数を抑えることができ、航跡候補の増大や誤相関を抑制できる。さらに、各モデル間の航跡コスト差を大きくすることで、適切なモデルの航跡候補が多次元相関決定により選択されやすくなる。これにより、多次元相関性能を向上させることができる。
【0075】
実施の形態2.
先の実施の形態1では、複数のモデルから生成した航跡候補コスト行列において、観測値割当が同一となる航跡候補が存在した場合に、多次元相関決定前にコストが最小となる航跡候補を抽出してコスト行列を生成し、多次元相関決定の入力としていた。これに対して、本実施の形態2では、各航跡で単一のモデルを抽出し、全航跡で組み合わせた複数のコスト行列で多次元相関決定を実施し、その結果から尤もらしい航跡組み合わせを抽出することで、各航跡の運動モデルの選択と平滑値の算出を行う場合について説明する。
【0076】
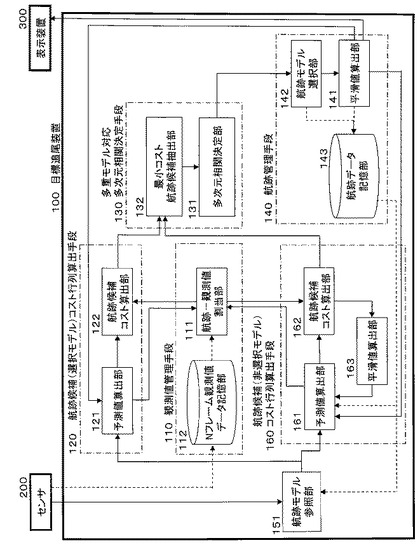
図6は、本発明の実施の形態2における目標追尾装置の構成図である。目標追尾装置100は、観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成される。ここで、先の実施の形態1における図1の構成と、本実施の形態2における図6の構成とを比較すると、多重モデル対応多次元相関決定手段130の内部構成が異なっている。
【0077】
図6において、多重モデル対応多次元相関決定手段130は、コスト行列組み合わせ部133において、各航跡の各モデルにより生成したコスト行列から各航跡から1モデルのコスト行列を抽出し多次元相関決定の入力としてのコスト行列を生成する。航跡とモデルの組み合わせ数分のコスト行列について、多次元相関決定部131において、多次元相関決定を実施する。
【0078】
最適多次元相関結果選択部134において、各コスト行列の多次元相関決定結果のうち、最小となるコスト和を持つものを多次元相関決定の解として抽出する。
【0079】
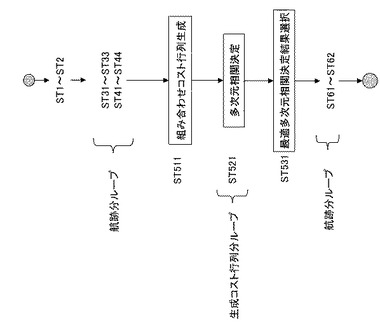
次に、動作について、先の実施の形態1における多重モデル対応多次元相関決定手段130からの変更点を中心に説明する。図7は、本発明の実施の形態2における多重モデル対応多次元相関決定手段130の一連処理の流れを示すフローチャートである。先の実施の形態1で示した図2のフローチャートにおけるステップST51、ST52が、図7におけるステップST511、ST521、ST531に置き換わる形になる。そこで、多重モデル対応多次元相関決定手段130による、これらステップST511、ST521、ST531について、以下に説明する。
【0080】
コスト行列組み合わせ部133は、航跡候補(選択モデル)コスト行列算出手段120および航跡候補(非選択モデル)コスト行列算出手段160で生成したコスト行列を、航跡およびモデルごとに組み合わせる。これにより、上式(9)に示すコスト行列が生成される(ST511)。図8は、本発明の実施の形態2の目標追尾装置において、2つの既存航跡が存在し2つの運動モデルを利用して航跡候補を生成した場合に生成されるコスト行列の組み合わせを示す説明図である。
【0081】
次に、生成された全コスト行列について、多次元相関決定を実施する(ST521)。各コスト行列の多次元相関決定の結果として抽出された航跡候補のコストの和が最小となる多次元相関結果を、最適多次元相関結果として選択する(ST531)。ここで、コスト和が同一となる結果が複数存在した場合には、前回までの多次元相関決定結果と今回の多次元相関決定結果とを比較し、選択する。比較方法としては、以下のようなものがある。
【0082】
[比較方法1]前回選択されたモデルを最も多く含む結果を選択する。
[比較方法2]コスト和の減少率が前回から最も大きかったモデルの組み合わせである入力の結果を選択する。
これらの判定条件については、対象としている目標や観測条件から事前に設定されているものとする。上記以外の動作は、先の実施の形態1と同様である。
【0083】
以上のように、実施の形態2によれば、各航跡で単一のモデルを抽出し全航跡で組み合わせた複数のコスト行列で多次元相関決定を実施し、その結果から尤もらしい航跡組み合わせを抽出する。この結果、演算負荷は増大するが、全てのモデルの組み合わせを考慮した多次元相関決定結果から航跡と観測値の割当を決定することができ、多次元相関結果の解の精度の向上を図ることができる。
【符号の説明】
【0084】
100 目標追尾装置、110 観測値管理手段、111 観測値割当部、112 Nフレーム観測値データ記憶部、120 航跡候補(選択モデル)コスト行列算出手段、121 予測値算出部、122 航跡候補コスト算出部、130 多重モデル対応多次元相関決定手段、131 多次元相関決定部、132 最小コスト航跡候補抽出部、133 コスト行列組み合わせ部、134 最適多次元相関結果選択部、140 航跡管理手段、141 平滑値算出部、142 航跡モデル選択部、143 航跡データ記憶部、151 航跡選択モデル参照部、160 航跡候補(非選択モデル)コスト行列算出手段、161 予測値算出部、162 航跡候補コスト算出部、163 平滑値算出部、200 センサ、300 表示装置。
【技術分野】
【0001】
本発明は、レーダ等のセンサシステムにおいて、センサからの目標位置の観測値を使って目標の航跡を生成する際の相関を多次元的に解く技術を用いる目標追尾装置に関し、より具体的には、航跡に対して複数のモデルを適用し、各モデルからの航跡候補を生成し、多次元相関決定を実施し、尤もらしいモデルに対応した航跡を導出することで、モデルとして複数の運動モデルや観測モデルを用意することで、目標の多種多様な運動や目標信号の高度・輝度等が不安定となる観測条件に対応して、精度のよい追尾を実現する多目標追尾装置に関する。
【背景技術】
【0002】
単一のモデルを適用し、多次元的に相関を解く技術として、複数サンプリング時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムである、複数フレーム割当法がある(例えば、特許文献1、および非特許文献1参照)。この複数フレーム割当法では、既存航跡とNサンプリング時刻に跨る観測値との相関決定を、N次元の割当問題に変換して解いている(ただし、Nは、2以上の整数)。
【0003】
N次元割当問題は、下式(1)の目的関数を最小化する2値変数Zi1・・・ziN+1を決定するものである。
【0004】
【数1】
【0005】
ここで、上式(1)におけるCi1・・・CiN+1は、既存航跡および観測値i1・・・iN+1から航跡を生成するのにかかるコストであり、通常、航跡尤度の逆数の対数値を使用する。また、2値変数Zi1・・・ziN+1は、下式(2)のとおりである。
【0006】
【数2】
【0007】
また、これら2値変数は、任意のi1については下式(3−1)、任意のi2〜iNについては下式(3−2)、そして、任意のiN+1については下式(3−3)の制約条件がある。
【0008】
【数3】
【0009】
ここで、nフレーム目における航跡候補は、前回((n−1)フレーム目)の航跡候補xn−1(+)を元に算出された予測値xn(−)から、相関関係にある当該フレームの観測値を割り当てることで更新される。ここでは、一例として、線形カルマンフィルタを想定した場合の航跡候補の更新、および残差共分散行列を用いた相関判定について、以下に示す。
【0010】
(n−1)フレームからnフレームにおける推移行列をΦ(n−1)とすると、予測値xn(−)は、下式(4)となる。
【0011】
【数4】
【0012】
また、(n−1)フレームでの平滑誤差共分散行列Pn−1(+)、および駆動雑音行列Q(n−1)から、予測誤差共分散行列Pn(−)は、下式(5)で求められる。
【0013】
【数5】
【0014】
また、残差共分散行列Snは、観測誤差共分散行列Bnを用いて、下式(6)で求められる。
【0015】
【数6】
【0016】
残差共分散行列Snを用いて、下式(7)が成立する場合には、航跡候補と観測値z(n)は、相関があると判定する。ここで、dは、ゲートサイズであり、観測値の持つ自由度Mのカイ2乗分布表から定められる事前設定パラメータである。
【0017】
【数7】
【0018】
nフレームにおける航跡候補i(尤度γi)が、(n−1)フレームにおける航跡候補l(尤度γl)から生成されたとする。この場合、探知確率PD、ゲート捕捉率PGおよび航跡候補生成における観測値との相関度gi、lを用いて、探知抜けによる航跡候補の生成におけるコストγi、o、観測値による航跡候補の生成におけるコストγi、1は、下式(8)となる。すなわち、更新された各航跡候補の尤度は、下式(8)により更新される。
【0019】
【数8】
【0020】
複数のモデルを適用して航跡の予測値を算出し、得られた観測値の各モデルで更新した航跡の予測値の適合度を用いて航跡を更新することで、目標の多種多様な運動や目標信号の高度・輝度等が不安定となる観測条件に対応する技術として、多重モデル方式がある。
【0021】
多重モデル方式の例として、各運動モデルで表した運動が、実際の目標の運動と一致している適合度(以下、モデル信頼度と呼ぶ)で、各観測フレームでの各追尾フィルタの出力である平滑値および平滑誤差共分散行列などを、重み付け平均しながら、複数の追尾フィルタを並行に使用する方式が提案されている(例えば、特許文献2、非特許文献2参照)。
【先行技術文献】
【特許文献】
【0022】
【特許文献1】特開2007−212244号公報
【特許文献2】特開2002−328162号公報
【非特許文献】
【0023】
【非特許文献1】A.B.Poore and A.J.RobertsonIII "A New Lagrangian Relaxation Based Algorithm for a Class of Multidimensional Assignment Problems" Computational Optimization and Applications, 8, 129-150, 1997.
【非特許文献2】YAAKOV BAR-SHALOM, X.RONG LI, THIAGALINGAM KIRUBBARAJAN "Estimation with Applications to Tracking and Navigation" A Wiley-Interscience Publication JOHN WILEY & SONS,INC., P441-457.
【発明の概要】
【発明が解決しようとする課題】
【0024】
しかしながら、従来技術には、以下のような課題がある。
従来の複数フレーム割当法を用いた目標追尾装置は、航跡と観測値の割当を1フレーム前の航跡候補と当該観測フレームの観測値との割当により更新していた。
【0025】
また、従来の多重モデル方式を適用した場合、各観測フレームでの航跡候補更新において、複数のモデルによる遷移を考慮することとなる。この結果、航跡候補が増大することによる多次元相関決定の解精度の劣化や演算時間増大、また、この航跡候補の増大にあわせて航跡候補の予測値が増大し、目標信号でない不要信号からなる観測値との相関が多く発生することによる誤相関が多く発生する課題があった。
【0026】
図9は、従来の多重モデル方式の問題点を説明するための図である。より具体的には、時刻t3からt4に進む際に、t3における平滑値を用いて複数のモデル(図9では直進運動モデルと旋回運動モデル)により予測値を算出した場合の、航跡候補の増大と誤相関の様子を示している。
【0027】
本発明は、前記のような課題を解決するためになされたものであり、航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0028】
本発明に係る目標追尾装置は、センサからの観測値を入力してNフレーム分(Nは2以上の整数)の観測値を格納し、指定フレームでの既存航跡と観測値との割当を行う観測値管理手段と、複数のモデルから当該航跡の前回処理で選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする航跡モデル参照部と、選択モデルでの航跡の予測値を算出し、観測値管理手段による割当結果から航跡候補を生成してコストを算出し、選択モデルに対応するコスト行列を求める航跡候補(選択モデル)コスト行列算出手段と、Nフレーム前に算出された平滑値から(N−1)フレーム前の予測値を算出し、(N−1)フレーム前の観測値との割当から(N−1)フレーム前における航跡候補を生成してコスト、平滑値を算出し、次に、(N−1)フレーム前における航跡候補について算出した平滑値から(N−2)フレーム前の予測値を算出し、(N−2)フレーム前の観測値との割当から(N−2)フレーム前における航跡候補を生成してコスト、平滑値を算出し、以下、(N−3)フレーム前から今回観測フレームまで同様の処理を繰り返し、非選択モデルに対応するコスト行列を求める航跡候補(非選択モデル)コスト行列算出手段と、選択モデルに対応して算出されたコスト行列と、非選択モデルに対応して算出されたコスト行列とから、同一観測値割当となった航跡候補のうち最小コストを有する航跡候補とコストを抽出して新たなコスト行列を生成し、新たなコスト行列を用いて多次元相関決定を実施する多重モデル対応多次元相関決定手段と、多次元相関決定により抽出された最小コストを有する航跡候補の組み合わせから各航跡のモデルを決定するとともに、今回観測フレームにおける平滑値を算出し格納する航跡管理手段とを備えたものである。
【発明の効果】
【0029】
本発明に係る目標追尾装置によれば、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施することにより、航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得ることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の実施の形態1における目標追尾装置の構成図である。
【図2】本発明の実施の形態1の目標追尾装置における、kフレーム目での一連処理を示すフローチャートである。
【図3】本発明の実施の形態1における目標追尾装置で割り当てられた観測値、および生成されるコスト行列の説明図である。
【図4】本発明の実施の形態1の目標追尾装置において、2つの異なるモデルで生成されたコスト行列を利用して、多次元相関決定部に入力するコスト行列を決定する方法の説明図である。
【図5】本発明の実施の形態1における目標追尾装置により、従来の問題点が解決されたことを説明するための図である。
【図6】本発明の実施の形態2における目標追尾装置の構成図である。
【図7】本発明の実施の形態2における多重モデル対応多次元相関決定手段の一連処理の流れを示すフローチャートである。
【図8】本発明の実施の形態2の目標追尾装置において、2つの既存航跡が存在し2つの運動モデルを利用して航跡候補を生成した場合に生成されるコスト行列の組み合わせを示す説明図である。
【図9】従来の多重モデル方式の問題点を説明するための図である。
【発明を実施するための形態】
【0031】
以下、本発明の目標追尾装置の好適な実施の形態につき図面を用いて説明する。
【0032】
実施の形態1.
図1は、本発明の実施の形態1における目標追尾装置の構成図である。本実施の形態1における目標追尾装置100は、観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成される。
【0033】
観測値管理手段110は、航跡−観測値割当部111、およびNフレーム観測値データ記憶部112を含む。また、航跡候補(選択モデル)コスト行列算出手段120は、予測値算出部121、および航跡候補コスト算出部122を含む。また、多重モデル対応多次元相関決定手段130は、多次元相関決定部131、および最小コスト航跡候補抽出部132を含む。
【0034】
また、航跡管理手段140は、平滑値算出部141、航跡モデル選択部142、および航跡データ記憶部143を含む。さらに、航跡候補(非選択モデル)コスト行列算出手段160は、予測値算出部161、航跡候補コスト算出部162、および平滑値算出部163を含む。
【0035】
図1において、観測値管理手段110は、以下の処理を行う。Nフレーム観測値データ記憶部112には、センサ200からの観測値がNフレーム分蓄積される。また、航跡−観測値割当部111は、航跡候補(選択モデル)コスト行列算出手段120内の予測値算出部121、および航跡候補(非選択モデル)コスト行列算出手段160内の予測値算出部161でそれぞれ算出された航跡候補の予測値に基づいて、航跡候補と当該観測フレームにおける観測値との割当を行う。
【0036】
また、航跡選択モデル参照部151は、センサ200から観測値が入力された際に、当該航跡の前回選択されたモデルを、航跡データ記憶部143に記憶された航跡データから参照し、当該航跡の当該観測フレームのコスト行列算出における選択モデルあるいは非選択モデルのいずれであるかを決定する。
【0037】
また、航跡候補(選択モデル)コスト行列算出手段120は、以下の処理を行う。予測値算出部121は、当該航跡の前回選択されたモデルにより、当該観測フレームでの予測値を算出する。そして、航跡候補コスト算出部122は、観測値管理手段110により割り当てられた観測値により、航跡候補を生成し、コストを算出する。
【0038】
また、航跡候補(非選択モデル)コスト行列算出手段160は、以下の処理を行う。予測値算出部161は、当該航跡の前回選択されたモデルのNフレーム前における平滑値を、平滑値算出部163から取得し、その平滑値を元に(N−1)フレーム前での予測値を算出する。そして、航跡候補コスト算出部162は、(N−1)フレーム前での観測値との割当から航跡候補を生成し、コストを算出する。
【0039】
なお、(N−1)フレーム前での予測値の算出に当たっては、以下のような2通りのその他の方法を用いてもよい。
航跡候補(非選択モデル)コスト行列算出手段160は、選択モデルでのNフレーム前に算出された平滑値および非選択モデルでのNフレーム前に算出された平滑誤差共分散を用いて、(N−1)フレーム前の予測値を算出することができる。
【0040】
また、航跡候補(非選択モデル)コスト行列算出手段160は、選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストと、非選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストを用いて、Nフレーム前での平滑値、平滑誤差共分散を算出し、この算出結果を用いて(N−1)フレーム前の予測値を算出することもできる。
【0041】
続いて、予測値算出部161は、当該モデルで航跡候補の予測値を算出する。そして、航跡候補コスト算出部162は、(N−2)フレーム前の観測値との割当から航跡候補を生成し、コストを算出する。これを当該観測フレームまで繰り返し、当該観測フレームにおける前回選択されなかったモデルでの航跡候補の生成および各航跡候補のコストの算出を行う。
【0042】
また、多重モデル対応多次元相関決定手段130は、以下の処理を行う。最小コスト航跡候補抽出部132は、航跡候補(選択モデル)コスト行列算出手段120および航跡候補(非選択モデル)コスト行列算出手段160から導出された各航跡候補の観測値割当とコストからなるコスト行列から、同一航跡候補の観測値割当の中からコストが最小となる航跡候補とコストを抽出する。さらに、多次元相関決定部131は、抽出されたコストからコスト行列を生成し、多次元相関決定を行う。
【0043】
また、航跡管理手段140は、以下の処理を行う。航跡モデル選択部142は、多重モデル対応多次元相関決定手段130より抽出された各航跡候補が、どの運動モデルから更新されたかを選択する。さらに、平滑値算出部141は、割り当てられた観測値から平滑値を算出する。そして、航跡モデル選択部142による選択結果および平滑値算出部141で算出された平滑値は、航跡データとして航跡データ記憶部143に格納される。また、航跡の平滑値は、表示装置300により表示される。
【0044】
次に、図1の構成を備えた目標追尾装置における、kフレーム目での一連の処理について、フローチャートを用いて説明する。図2は、本発明の実施の形態1の目標追尾装置における、kフレーム目での一連処理を示すフローチャートである。
【0045】
まず始めに、観測値管理手段110において、センサ200から得られた観測値を、Nフレーム観測値データ記憶部112に格納する(ステップST1)。次に、航跡選択モデル参照部151において、各航跡について前回処理時に選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする(ステップST2)。
【0046】
各航跡の選択モデルについては、ステップST31〜ステップST33までの処理を行う。まず、航跡候補(選択モデル)コスト行列算出手段120の予測値算出部121において、前回算出した平滑値から予測値を、上式(4)を用いて算出する(ステップST31)。
【0047】
以降、予測値、平滑値、各種共分散の算出において、線形カルマンフィルタを用いた例を、数式を用いて説明する。観測値管理手段110の航跡−観測値割当部111において、予測値と入力した当該観測フレームでの観測値とから、航跡と観測値の割当を、上式(5)〜(7)に示す相関により実施する(ステップST32)。
【0048】
次に、航跡候補(選択モデル)コスト行列算出手段120の航跡候補コスト算出部122において、ステップST32での航跡観測値割当から航跡候補を生成し、航跡候補のコストを、上式(8)に示す予測値と観測値との相関度から算出し、選択モデルでの航跡候補とコスト値から構成されるコスト行列を生成する(ステップST33)。
【0049】
一方、各航跡の非選択モデルについては、ステップST41〜ステップST44までの処理を行う。kフレーム目の処理において、(N−1)フレーム前であるn=k−N+1から、現在の観測フレームであるn=kまでについて、予測値算出、観測値割当、コスト算出、平滑化算出の各ステップST41〜ST44を繰り返し行う。
【0050】
まず、航跡候補(非選択モデル)コスト行列算出手段160の予測値算出部161において、当該航跡のNフレーム前の平滑値を航跡データ記憶部143から取得し、nフレーム目の予測値(すなわち、最初は、(N−1)フレーム前での予測値に相当)を算出する(ステップST41)。なお、Nフレーム前の平滑値として、前回選択モデルでの平滑値、当該運動モデルの平滑値、もしくは、前回選択モデルと当該運動モデルのコスト比による混合値のいずれを利用してもよい。
【0051】
ここで、各値を用いての予測値の算出について、以下に説明する。
最新フレームがkフレーム目、運動モデルがs1、s2、・・・と複数あり、s1が前回選択モデルとした場合に、運動モデルs2で航跡候補を生成する場合について、下式(9)〜(11)を考える。s3、s4、・・・と3個以上の運動モデルがある場合についても同様である。
【0052】
【数9】
【0053】
ここで、xk−N(+)、Pk−N(+)は、下式(12)、(13)のいずれかである。
【0054】
【数10】
【0055】
ここで、1モデル間の推移のみを考慮する場合、xk−N(+)、Pk−N(+)は、下式(14)となる。
【0056】
【数11】
【0057】
また、全モデルの推移を考慮する場合、xk−N(+)、Pk−N(+)は、下式(15)となる。
【0058】
【数12】
【0059】
また、モデルとして、観測モデルを複数利用する場合は、上記においては、推移行列がΦsi(i=1、・・・、imax)となっていたのに対し、観測行列がHsj(j=1、・・・、imax)となる(以降の式においても同様である)。
【0060】
図2の説明に戻って、観測値管理手段110の航跡−観測値割当部111において、ステップST41で算出した予測値と(N−1)フレーム前での観測値とから、nフレーム目の航跡候補と観測値の割当を実施する(ステップST42)。
【0061】
ここで、航跡候補と観測値の相関判定について、以下に説明する。
k−N+1フレームにおけるある観測値z(k−N+1)が、航跡候補xk−Nが運動モデルs2で更新された場合に相関があるか否かの判定は、下式(16)により実施することとなる。
【0062】
【数13】
【0063】
また、図2の説明に戻って、航跡候補(非選択モデル)コスト行列算出手段160の航跡候補コスト算出部162において、ステップST42での航跡観測値割当から(N−1)フレーム前での航跡候補を生成し、航跡候補のコストを予測値と観測値の相関度から算出する(ステップST43)。
【0064】
ここで、航跡候補の尤度の算出について、以下に説明する。
k−Nフレームでの航跡候補lと、k−N+1フレームでの運動モデルs2と相関が取れた観測値とで生成された航跡候補iの航跡尤度は、下式(17)で表される。ここで、gi,lは、相関がとれた観測値と航跡候補lとの相関度である上式(16)の左辺の項による。
【0065】
【数14】
【0066】
再び図2の説明に戻って、平滑値算出部163において、(N−1)フレーム前での各航跡候補の平滑値、平滑誤差共分散、およびゲインを算出する(ステップST44)。この算出は、下式(18)〜(20)に従って行う。
【0067】
【数15】
【0068】
予測値算出部161において、ステップST44で算出した(N−1)フレーム前の平滑値から、予測値、予測誤差共分散、残差共分散を、モデルを固定して、上式(4)〜(6)を用いて算出し(ステップST41)、ステップST44までの処理を最新観測フレームまで繰り返し、非選択モデルでの航跡候補とコスト値から構成されるコスト行列を生成する。
【0069】
次に、ステップST51以降の多重モデル対応多次元相関決定手段130、および航跡管理手段140による処理について説明する。図3は、本発明の実施の形態1における目標追尾装置で割り当てられた観測値、および生成されるコスト行列の説明図である。より具体的には、既存の航跡に各フレームで割り当てられた観測値、および探知抜けからなる航跡候補と対応するコストからなるコスト行列の例を示している。
【0070】
多重モデル対応多次元相関決定手段130の最小コスト航跡候補抽出部132は、同一航跡から生成されたモデルが異なる航跡候補で、各フレームにおいて割当られた観測値の組み合わせが同一となる航跡候補が存在した場合、コストが最小となるモデルの航跡候補を抽出し、対応するコストからなるコスト行列を生成する(ステップST51)。
【0071】
図4は、本発明の実施の形態1の目標追尾装置において、2つの異なるモデルで生成されたコスト行列を利用して、多次元相関決定部131に入力するコスト行列を決定する方法の説明図である。ここで、同じ観測値割当でコストが同一となった場合には、前回までの選択運動モデルおよび航跡尤度と今回の航跡候補尤度とを比較し、選択する。比較方法としては、以下のようなものがある。
[比較方法1]前回選択モデルから導出した航跡候補のコストを利用する。
[比較方法2]前回フレームまでの観測値割当てにおけるコストからの減分が最も大きいコストを利用する。
[比較方法3]まず、比較方法2により実施し、区別がつかない場合には、比較方法1によりコストを決定する。
多次元相関決定部131において、先のステップST51で、図4に示したような方法で生成されたコスト行列を入力として、多次元相関決定を実施する(ステップST52)。
【0072】
次に、航跡管理手段140の航跡モデル選択部142は、ステップST52で選択された航跡候補のモデルを航跡のモデルとして、航跡データ記憶部143に格納する(ステップST61)。さらに、平滑値算出部141は、選択された航跡候補における各フレームの平滑値を算出し、航跡データ記憶部143に格納する(ステップST62)。
【0073】
図5は、本発明の実施の形態1における目標追尾装置により、従来の問題点が解決されたことを説明するための図である。先の図9で指摘したような航跡候補の増大と誤相関が多発するような状況においても、本実施の形態1の発明によれば、図5に示すように、これらの抑圧と正解航跡の選択が可能となる。
【0074】
以上のように、実施の形態1によれば、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。これにより、航跡候補と観測値の割当数を抑えることができ、航跡候補の増大や誤相関を抑制できる。さらに、各モデル間の航跡コスト差を大きくすることで、適切なモデルの航跡候補が多次元相関決定により選択されやすくなる。これにより、多次元相関性能を向上させることができる。
【0075】
実施の形態2.
先の実施の形態1では、複数のモデルから生成した航跡候補コスト行列において、観測値割当が同一となる航跡候補が存在した場合に、多次元相関決定前にコストが最小となる航跡候補を抽出してコスト行列を生成し、多次元相関決定の入力としていた。これに対して、本実施の形態2では、各航跡で単一のモデルを抽出し、全航跡で組み合わせた複数のコスト行列で多次元相関決定を実施し、その結果から尤もらしい航跡組み合わせを抽出することで、各航跡の運動モデルの選択と平滑値の算出を行う場合について説明する。
【0076】
図6は、本発明の実施の形態2における目標追尾装置の構成図である。目標追尾装置100は、観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成される。ここで、先の実施の形態1における図1の構成と、本実施の形態2における図6の構成とを比較すると、多重モデル対応多次元相関決定手段130の内部構成が異なっている。
【0077】
図6において、多重モデル対応多次元相関決定手段130は、コスト行列組み合わせ部133において、各航跡の各モデルにより生成したコスト行列から各航跡から1モデルのコスト行列を抽出し多次元相関決定の入力としてのコスト行列を生成する。航跡とモデルの組み合わせ数分のコスト行列について、多次元相関決定部131において、多次元相関決定を実施する。
【0078】
最適多次元相関結果選択部134において、各コスト行列の多次元相関決定結果のうち、最小となるコスト和を持つものを多次元相関決定の解として抽出する。
【0079】
次に、動作について、先の実施の形態1における多重モデル対応多次元相関決定手段130からの変更点を中心に説明する。図7は、本発明の実施の形態2における多重モデル対応多次元相関決定手段130の一連処理の流れを示すフローチャートである。先の実施の形態1で示した図2のフローチャートにおけるステップST51、ST52が、図7におけるステップST511、ST521、ST531に置き換わる形になる。そこで、多重モデル対応多次元相関決定手段130による、これらステップST511、ST521、ST531について、以下に説明する。
【0080】
コスト行列組み合わせ部133は、航跡候補(選択モデル)コスト行列算出手段120および航跡候補(非選択モデル)コスト行列算出手段160で生成したコスト行列を、航跡およびモデルごとに組み合わせる。これにより、上式(9)に示すコスト行列が生成される(ST511)。図8は、本発明の実施の形態2の目標追尾装置において、2つの既存航跡が存在し2つの運動モデルを利用して航跡候補を生成した場合に生成されるコスト行列の組み合わせを示す説明図である。
【0081】
次に、生成された全コスト行列について、多次元相関決定を実施する(ST521)。各コスト行列の多次元相関決定の結果として抽出された航跡候補のコストの和が最小となる多次元相関結果を、最適多次元相関結果として選択する(ST531)。ここで、コスト和が同一となる結果が複数存在した場合には、前回までの多次元相関決定結果と今回の多次元相関決定結果とを比較し、選択する。比較方法としては、以下のようなものがある。
【0082】
[比較方法1]前回選択されたモデルを最も多く含む結果を選択する。
[比較方法2]コスト和の減少率が前回から最も大きかったモデルの組み合わせである入力の結果を選択する。
これらの判定条件については、対象としている目標や観測条件から事前に設定されているものとする。上記以外の動作は、先の実施の形態1と同様である。
【0083】
以上のように、実施の形態2によれば、各航跡で単一のモデルを抽出し全航跡で組み合わせた複数のコスト行列で多次元相関決定を実施し、その結果から尤もらしい航跡組み合わせを抽出する。この結果、演算負荷は増大するが、全てのモデルの組み合わせを考慮した多次元相関決定結果から航跡と観測値の割当を決定することができ、多次元相関結果の解の精度の向上を図ることができる。
【符号の説明】
【0084】
100 目標追尾装置、110 観測値管理手段、111 観測値割当部、112 Nフレーム観測値データ記憶部、120 航跡候補(選択モデル)コスト行列算出手段、121 予測値算出部、122 航跡候補コスト算出部、130 多重モデル対応多次元相関決定手段、131 多次元相関決定部、132 最小コスト航跡候補抽出部、133 コスト行列組み合わせ部、134 最適多次元相関結果選択部、140 航跡管理手段、141 平滑値算出部、142 航跡モデル選択部、143 航跡データ記憶部、151 航跡選択モデル参照部、160 航跡候補(非選択モデル)コスト行列算出手段、161 予測値算出部、162 航跡候補コスト算出部、163 平滑値算出部、200 センサ、300 表示装置。
【特許請求の範囲】
【請求項1】
センサからの観測値を入力してNフレーム分(Nは2以上の整数)の観測値を格納し、指定フレームでの既存航跡と観測値との割当を行う観測値管理手段と、
複数のモデルから当該航跡の前回処理で選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする航跡モデル参照部と、
前記選択モデルでの航跡の予測値を算出し、前記観測値管理手段による割当結果から航跡候補を生成してコストを算出し、前記選択モデルに対応するコスト行列を求める航跡候補(選択モデル)コスト行列算出手段と、
Nフレーム前に算出された平滑値から(N−1)フレーム前の予測値を算出し、(N−1)フレーム前の観測値との割当から(N−1)フレーム前における航跡候補を生成してコスト、平滑値を算出し、次に、(N−1)フレーム前における前記航跡候補について算出した前記平滑値から(N−2)フレーム前の予測値を算出し、(N−2)フレーム前の観測値との割当から(N−2)フレーム前における航跡候補を生成してコスト、平滑値を算出し、以下、(N−3)フレーム前から今回観測フレームまで同様の処理を繰り返し、非選択モデルに対応するコスト行列を求める航跡候補(非選択モデル)コスト行列算出手段と、
前記選択モデルに対応して算出された前記コスト行列と、前記非選択モデルに対応して算出されたコスト行列とから、同一観測値割当となった航跡候補のうち最小コストを有する航跡候補とコストを抽出して新たなコスト行列を生成し、前記新たなコスト行列を用いて多次元相関決定を実施する多重モデル対応多次元相関決定手段と、
多次元相関決定により抽出された前記最小コストを有する航跡候補の組み合わせから各航跡のモデルを決定するとともに、今回観測フレームにおける平滑値を算出し格納する航跡管理手段と
を備えたことを特徴とする目標追尾装置。
【請求項2】
請求項1に記載の目標追尾装置において、
前記航跡候補(非選択モデル)コスト行列算出手段は、前記選択モデルでのNフレーム前に算出された平滑値および前記非選択モデルでのNフレーム前に算出された平滑誤差共分散を用いて(N−1)フレーム前の予測値を算出することを特徴とする目標追尾装置。
【請求項3】
請求項1に記載の目標追尾装置において、
前記航跡候補(非選択モデル)コスト行列算出手段は、前記選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストと、前記非選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストを用いて、Nフレーム前での平滑値、平滑誤差共分散を算出し、この算出結果を用いて(N−1)フレーム前の予測値を算出することを特徴とする目標追尾装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記同一観測値割当となった航跡候補のうち、最小コストとなる航跡候補が複数存在した場合には、前回までの選択運動モデルおよび航跡尤度と今回の航跡候補尤度との比較結果に基づいて1つの航跡候補を選択することを特徴とする目標追尾装置。
【請求項5】
請求項1ないし4のいずれか1項に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記選択モデルに対応して算出された前記コスト行列と、前記非選択モデルに対応して算出されたコスト行列とから、各航跡とモデルの組み合わせ数分のコスト行列を生成し、生成した前記コスト行列について多次元相関決定を実施し、抽出した航跡候補のコストの和が最小となる新たなコスト行列を用いて多次元相関決定を実施することを特徴とする目標追尾装置。
【請求項6】
請求項5に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記コストの和が同一となる結果が複数存在した場合には、コストの和の減少率が最も高い各航跡のモデルの組み合わせからなる新たなコスト行列を用いて前記多次元相関決定を実施することを特徴とする目標追尾装置。
【請求項1】
センサからの観測値を入力してNフレーム分(Nは2以上の整数)の観測値を格納し、指定フレームでの既存航跡と観測値との割当を行う観測値管理手段と、
複数のモデルから当該航跡の前回処理で選択されたモデルを参照し、選択されたモデルを選択モデル、選択されなかったモデルを非選択モデルとする航跡モデル参照部と、
前記選択モデルでの航跡の予測値を算出し、前記観測値管理手段による割当結果から航跡候補を生成してコストを算出し、前記選択モデルに対応するコスト行列を求める航跡候補(選択モデル)コスト行列算出手段と、
Nフレーム前に算出された平滑値から(N−1)フレーム前の予測値を算出し、(N−1)フレーム前の観測値との割当から(N−1)フレーム前における航跡候補を生成してコスト、平滑値を算出し、次に、(N−1)フレーム前における前記航跡候補について算出した前記平滑値から(N−2)フレーム前の予測値を算出し、(N−2)フレーム前の観測値との割当から(N−2)フレーム前における航跡候補を生成してコスト、平滑値を算出し、以下、(N−3)フレーム前から今回観測フレームまで同様の処理を繰り返し、非選択モデルに対応するコスト行列を求める航跡候補(非選択モデル)コスト行列算出手段と、
前記選択モデルに対応して算出された前記コスト行列と、前記非選択モデルに対応して算出されたコスト行列とから、同一観測値割当となった航跡候補のうち最小コストを有する航跡候補とコストを抽出して新たなコスト行列を生成し、前記新たなコスト行列を用いて多次元相関決定を実施する多重モデル対応多次元相関決定手段と、
多次元相関決定により抽出された前記最小コストを有する航跡候補の組み合わせから各航跡のモデルを決定するとともに、今回観測フレームにおける平滑値を算出し格納する航跡管理手段と
を備えたことを特徴とする目標追尾装置。
【請求項2】
請求項1に記載の目標追尾装置において、
前記航跡候補(非選択モデル)コスト行列算出手段は、前記選択モデルでのNフレーム前に算出された平滑値および前記非選択モデルでのNフレーム前に算出された平滑誤差共分散を用いて(N−1)フレーム前の予測値を算出することを特徴とする目標追尾装置。
【請求項3】
請求項1に記載の目標追尾装置において、
前記航跡候補(非選択モデル)コスト行列算出手段は、前記選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストと、前記非選択モデルでのNフレーム前に算出された平滑値、平滑誤差共分散、航跡コストを用いて、Nフレーム前での平滑値、平滑誤差共分散を算出し、この算出結果を用いて(N−1)フレーム前の予測値を算出することを特徴とする目標追尾装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記同一観測値割当となった航跡候補のうち、最小コストとなる航跡候補が複数存在した場合には、前回までの選択運動モデルおよび航跡尤度と今回の航跡候補尤度との比較結果に基づいて1つの航跡候補を選択することを特徴とする目標追尾装置。
【請求項5】
請求項1ないし4のいずれか1項に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記選択モデルに対応して算出された前記コスト行列と、前記非選択モデルに対応して算出されたコスト行列とから、各航跡とモデルの組み合わせ数分のコスト行列を生成し、生成した前記コスト行列について多次元相関決定を実施し、抽出した航跡候補のコストの和が最小となる新たなコスト行列を用いて多次元相関決定を実施することを特徴とする目標追尾装置。
【請求項6】
請求項5に記載の目標追尾装置において、
前記多重モデル対応多次元相関決定手段は、前記コストの和が同一となる結果が複数存在した場合には、コストの和の減少率が最も高い各航跡のモデルの組み合わせからなる新たなコスト行列を用いて前記多次元相関決定を実施することを特徴とする目標追尾装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−230404(P2010−230404A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2009−76745(P2009−76745)
【出願日】平成21年3月26日(2009.3.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願日】平成21年3月26日(2009.3.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]