
目標追尾装置
【課題】本発明は、正解航跡候補を含めた航跡候補をその状況に適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を提供する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えばレーダ等のセンサシステムに用いられ、センサからの目標位置についての観測値に基づいて目標の航跡を生成する目標追尾装置に関する。
【背景技術】
【0002】
目標追尾装置では、一般的に、センサからの目標位置の観測値を用いて目標の航跡を生成する際の相関を多次元的に解く技術が使用される。このような技術では、探知状況が比較的良好な場合には、所定の指定フレーム数で多次元の相関決定が行われる。他方、探知状況が比較的悪く探知抜けが多く発生している場合には、指定フレーム数内の観測フレーム数で航跡候補の区別がつかずに正解航跡が破棄されるような状況において、指定フレーム数を超えた数の観測フレームを用いて、多次元の相関決定を行う。即ち、各探知状況に応じて、航跡候補の推定に用いる観測フレーム数を自動的に変化させる。このように、各探知状況に応じた適切な観測フレーム数で相関決定を行うことによって、比較的精度のよい目標追尾を実現する。
【0003】
この多次元的に相関を解く技術としては、複数サンプリング時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムである複数フレーム割当法がある(例えば、特許文献1及び非特許文献1参照)。このような複数フレーム割当法では、既存航跡とNフレーム時刻に跨る観測値との相関決定をN次元の割当問題に変換して解く。このN次元割当問題は、以下の(1)のように表すことができる。
【0004】
【数1】

【0005】
この式(1)のCi2・・・CiN+1は、既存航跡及び観測値i1・・・iN+1から航跡を生成する際に用いられる航跡尤度に関するコストであり、通常航跡尤度の逆数の対数値である。変数zi1・・・ziN+1は、次の式(2)の通りである。また、(1)の割当問題には、次の式(3)のような制約条件がある。
【0006】
【数2】
【0007】
ここで、nフレーム目における航跡候補は、前回(n−1フレーム目)の航跡候補xn−1(+)を基に算出された予測値xn(−)から、相関関係にある当該フレームの観測値を割り当てることで更新される。ここでは、一例として、線形カルマンフィルタを想定した場合の航跡候補の更新、及び残差共分散行列を用いた相関判定について、簡単に説明する。
【0008】
航跡候補のxn−1(+)のnフレームでの予測値は、n−1からnフレームにおける推移行列をΦ(n−1)、nフレームでの観測行列をH(n)とすると、次の式(4)の通りである。
【数3】
【0009】
また、n−1フレームでの平滑誤差共分散行列Pn−1(+)、駆動雑音行列Q(n−1)から予測誤差共分散行列Pn(−)は、次の式(5)の通りである。
【数4】
【0010】
残差共分散行列Snは、観測誤差共分散行列Bnを用いて以下の式(6)のように求まる。
【数5】
【0011】
そして、複数フレーム割当法では、残差行分散行列Snを用いて、以下の式(7)が成立する場合に、航跡候補と観測値z(n)は相関があると判定する。ここで、dはゲートサイズであり観測値の持つ自由度Mのカイ2乗分布表から定められる事前に設定されたパラメータである。
【数6】
【0012】
nフレームにおける航跡候補i(尤度γi)がn−1フレームにおける航跡候補l(尤度γl)から生成されたとすると、探知確率PD、ゲート捕捉率PG及び航跡候補生成における観測値との相関度gi,lを用いた際に、探知抜けによる航跡候補の生成における尤度γi,0と、観測値による航跡候補の生成における尤度γi,lとは、以下の式(8)の通りである。そして、更新された各航跡候補の尤度は、式(8)の演算処理により更新される。
【数7】
【0013】
なお、既存航跡候補と観測値の割り当て結果とを用いた相関決定の処理を効率化させるための技術としては、互いに観測値を共有する航跡候補からなるクラスタを生成し、クラスタ毎に処理を実行する方式がある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2007−212244号公報
【特許文献2】特開平8−271617号公報
【非特許文献】
【0015】
【非特許文献1】A.B.Poore and A.J.RobertsonIII "A New Lagrangian Relaxation Based Algorithm for a Class of Multidimensional Assignment Problems" Computational Optimization and Applications, 8, 129-150, 1997.
【発明の概要】
【発明が解決しようとする課題】
【0016】
特許文献1及び非特許文献1のような複数フレーム割当法を用いた従来の目標追尾装置では、探知抜けフレームも多次元の相関決定に利用されていた。このため、指定フレーム数内で多次元の相関決定の観測フレームに探知抜けフレームが比較的多く含まれている場合に、その指定フレーム数内で航跡候補の区別がつかず指定フレーム数内で起点となる観測値が同一である航跡候補が複数存在しても、1フレーム前に選択された航跡候補のみを抽出し、他の航跡候補を削除せざるを得なかった。
【0017】
この結果、一時的な尤度の低下により選択されなかった正解航跡候補(目標信号からなる観測値を多く有する航跡)が次フレームの観測値を割り当てる前に削除されてしまい、各フレームで割り当てられた観測値の組み合わせが目標らしいと判断されるまでの時間である航跡確立の時間が長くなったり、追尾維持(確立した航跡と目標からなる観測値とを各フレームで割り当てる)に失敗したりするといった現象が発生していた。
【0018】
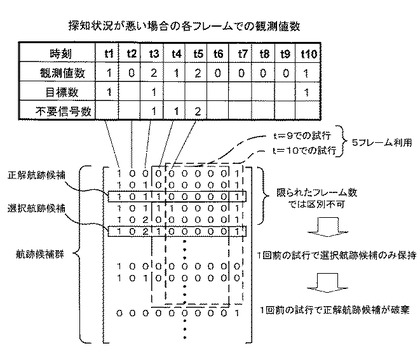
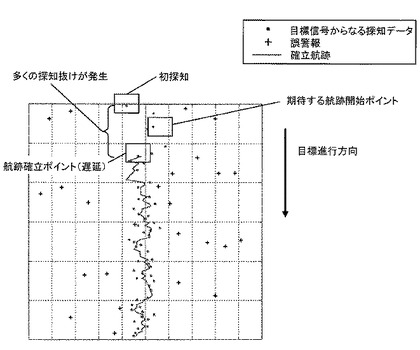
ここで、図9,10に、従来装置における追尾確立が遅延する様子を示す。図9の表は、各フレームでの観測値数、及びその観測値が目標からか不要信号かを示す。また、図9の行列は、各航跡候補の各フレームでの観測値の割当を示し、指定フレーム数(この例では5フレーム)では航跡候補の区別がつかず正解航跡が削除される様子を示す。図10の航跡グラフにおいて、図9の探知状況及び行列のような情報を用いた場合には、航跡確立が遅延していることがわかる。
【0019】
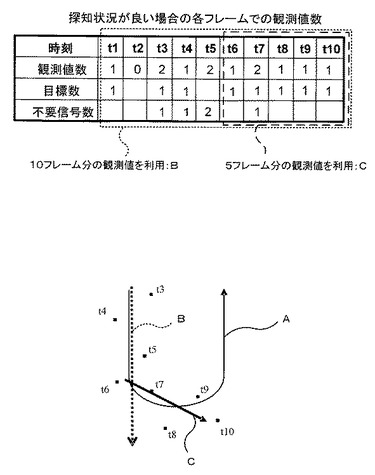
また、従来装置において、正解航跡候補の破棄を回避するために単純に指定フレーム数を多くした場合には、探知状況がよく探知抜けが発生せずに少ない指定フレーム数で十分航跡候補が区別できるにもかかわらず、長い指定フレーム数となることで不要に航跡候補が多くなる。この結果、過去の観測フレームを多く使うことにより過去の情報の影響を強く受けることから、例えば旋回等の高機動運動への追従性が損なわれたり、演算負荷が増大したりするという問題が生じる。
【0020】
具体的に、図11の矢示Aのように、目標物の旋回動作等の高機動運動が生じた場合に、10フレーム分の観測値を利用するときには、矢示Bのように、過去の観測値の影響を受けて目標の運動に対する追従性が低下し、目標物が直進しているものとして追尾確立してしまうこととなり、追尾精度が低下してしまう。なお、5フレーム分の観測値を利用するときには、矢示Cのように、比較的良好な追従性を示すこととなる。
【0021】
この発明は、上記のような課題を解決するためになされたものであり、正解航跡候補を含めた航跡候補を適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0022】
この発明に係る目標追尾装置は、センサの観測値を用いて目標物の航跡を推定するものであって、前記センサの観測値を取得し、その取得した観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新し、その更新した航跡候補についての尤度に関する指標であるコストを算出する航跡候補生成部と、前記センサの観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択し、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する多次元相関行列生成部と、前記多次元相関行列生成部によって生成された前記多次元相関行列を用いて、多次元の相関決定を行い、当該観測フレームで航跡候補の組み合わせを抽出する多次元相関決定部と、抽出された航跡候補の組み合わせを次の観測フレームでの既存の航跡候補として設定するとともに、抽出された航跡候補について航跡確立する航跡決定部と、次の観測フレームでの既存の航跡候補について、航跡表示用の平滑値と、次の観測フレームで取得する観測値を当該既存の航跡候補に割り当てるための予測値とを算出する航跡候補追尾処理部とを備え、前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、選択した観測フレームが、航跡候補に割り当てられる観測値が存在しない探知抜けフレームであれば、その探知抜けフレームを除外して、航跡候補に割り当てられる観測値が存在する前記指定フレーム数の探知フレームを選択するために、前記探知抜けフレームよりも前の観測フレームを選択するものである。
【発明の効果】
【0023】
この発明に係る目標追尾装置によれば、多次元相関行列生成部が、多次元相関行列を生成する際に、選択した観測フレームが探知抜けフレームであれば、その探知抜けフレームを除外して、探知抜けフレームよりも前の観測フレームを選択するので、探知抜けフレームを多次元の相関決定の観測フレームに含めないことで探知状況に合わせて自動的に多次元の相関決定に用いる絶対的なフレーム数を変化させ、航跡候補の区別ができるようにして多くの航跡候補を残すことが可能となることにより、正解航跡候補を含めた航跡候補を適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる。
【図面の簡単な説明】
【0024】
【図1】この発明の実施の形態1による目標追尾装置を示すブロック図である。
【図2】図1の目標追尾装置の動作を示すフローチャートである。
【図3】図1の目標追尾装置の動作を示すフローチャートである。
【図4】実施の形態1の目標追尾装置及び従来装置のそれぞれの航跡候補選択動作を対比して説明するための説明図である。
【図5】この発明の実施の形態2による目標追尾装置を示すブロック図である。
【図6】図5の目標追尾装置の動作を示すフローチャートである。
【図7】目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した場合の処理を説明するための説明図である。
【図8】目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した場合の処理を説明するための説明図である。
【図9】従来装置における追尾確立が遅延する様子を説明するための説明図である。
【図10】従来装置における追尾確立が遅延する様子を説明するための説明図である。
【図11】指定フレームのフレーム長を長くした場合の追尾確立の様子を説明するための説明図である。
【発明を実施するための形態】
【0025】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1による目標追尾装置を示すブロック図である。
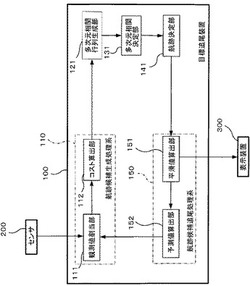
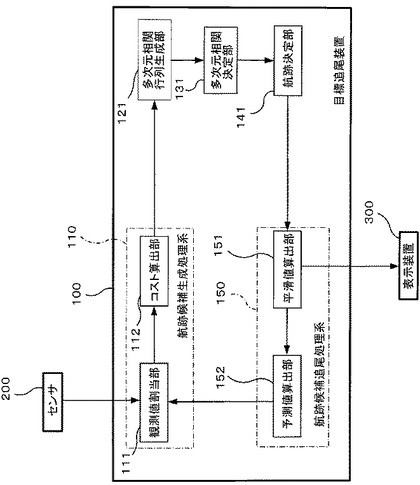
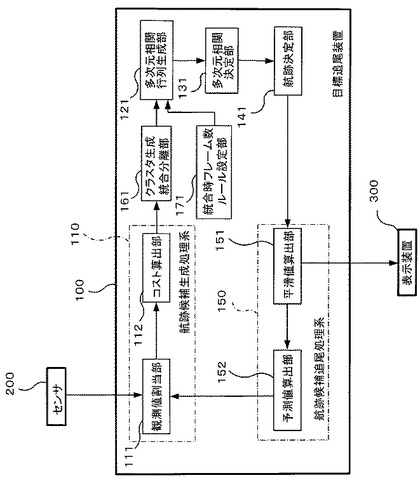
図1において、目標追尾装置100は、例えばレーダ等のセンサ200及び例えばモニタ等の表示装置300に接続されている。また、目標追尾装置100は、航跡候補生成処理系(航跡候補生成処理部)110、多次元相関行列生成部121、多次元相関決定部131、航跡決定部141及び航跡候補追尾処理系(航跡候補追尾処理部)150を有している。
【0026】
航跡候補生成処理系110は、観測値割当部111及びコスト算出部112を含んでいる。観測値割当部111は、航跡候補追尾処理系150から受けた予測値を用いて、センサ200から受けた観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新する。また、コスト算出部112は、観測値割当部111によって更新された各航跡候補について、航跡尤度の逆数の対数値であるコスト(航跡尤度に関するコスト)を算出する。このコストは、予測値に対して観測値が尤もらしいかどうか(信頼度が高いか否か)を判別するための指標である。
【0027】
多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。そして、多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。
【0028】
ここで、多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前(過去)の観測フレームを選択する。即ち、多次元相関行列生成部121は、探知抜けフレームを多次元相関行列の観測フレームから除外することによって、全航跡候補と相関する観測値が存在する探知フレームを指定フレーム数分選択する。
【0029】
多次元相関決定部131は、多次元相関行列生成部121によって生成された多次元相関行列を用いて多次元の相関決定を行い、当該観測フレームでの尤もらしい航跡候補の組み合わせを抽出する。航跡決定部141は、多次元相関決定部131によって抽出された航跡候補の組み合わせと、指定フレーム数(探知抜けフレームを除く)の前までの割り当てられた観測値が同一である航跡候補以外を削除し、残った航跡候補を次の観測フレームでの既存の航跡候補(選択航跡候補)として保持する。また、航跡決定部141は、抽出された航跡候補に、目標番号が付与されておらず、かつその航跡候補に対応する尤度が一定閾値(事前に設定されたパラメータ)を超えた場合には、航跡を確立し、その航跡候補に目標番号を付与する。
【0030】
航跡候補追尾処理系150は、平滑値算出部151及び予測値算出部(航跡選択モデル参照部)152を含んでいる。平滑値算出部151は、航跡決定部141によって保持されている航跡候補の(航跡表示用の)平滑値を算出する。また、平滑値算出部151は、航跡決定部141によって目標番号が付与され、多次元相関決定部131によって抽出された航跡候補についての平滑値を表示装置300に送り、その航跡候補についての平滑値を表示装置300に表示させる。予測値算出部152は、先の式(4)を用いた演算処理を行い、当該フレームの各既存航跡候補の予測値を算出する。
【0031】
ここで、目標追尾装置100は、演算処理部(CPU)、記憶部(ROM、RAM等)及び信号入出力部を持ったハードウェア(図示せず)により構成することができる。目標追尾装置100のハードウェアの記憶部には、航跡候補生成処理系110、多次元相関行列生成部121、多次元相関決定部131、航跡決定部141及び航跡候補追尾処理系150の機能を実現するためのプログラムが格納されている。
【0032】
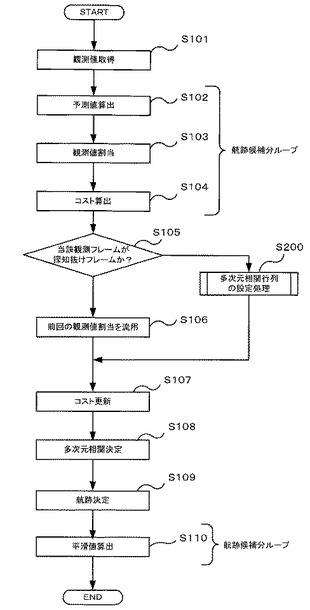
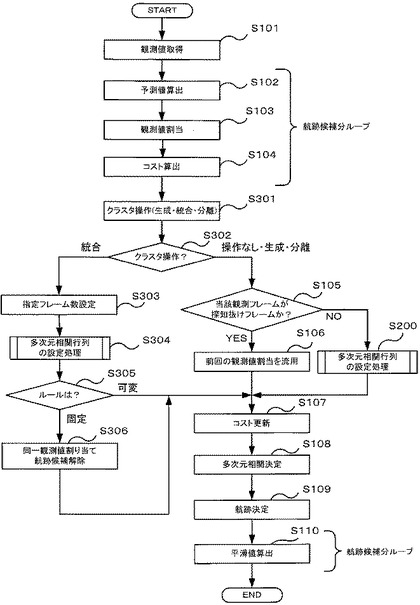
次に、動作について説明する。図2,3は、図1の目標追尾装置100の動作を示すフローチャートである。ここでは、センサ200が新たに生成した観測値に対応する観測フレームをkフレームとし、このkフレーム目の処理について説明する。図2,3において、目標追尾装置100の観測値割当部111は、センサ200からkフレーム目の観測値を取得する(ステップS101)。また、予測値算出部152は、先の式(4)を用いた演算処理を行うことによって、kフレーム目の各既存航跡候補の予測値を算出し、その算出した予測値を観測値割当部111へ送る(ステップS102)。
【0033】
そして、観測値割当部111は、kフレーム目の観測値及び予測値から、航跡と観測値との割当を行う(ステップS103)。この後、コスト算出部112は、その割り当てられた観測値を用いて航跡候補を生成し、既存の航跡候補と観測値の相関度から算出した航跡候補の尤度から、航跡候補のコストを算出する(ステップS104)。なお、予測値算出部152、観測値割当部111及びコスト算出部112は、ステップS102〜S104の処理を、複数の航跡候補のそれぞれについて実行する(航跡候補分ループする)。
【0034】
多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであるか否かを判定する(ステップS105)。このときに、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームでないことを確認した場合には、図3に示す多次元相関行列の設定処理を行う(ステップS200)。他方、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであることを確認した場合には、前回の処理で割り当てられた観測値を流用し(ステップS106)、ステップS107へ移行する。
【0035】
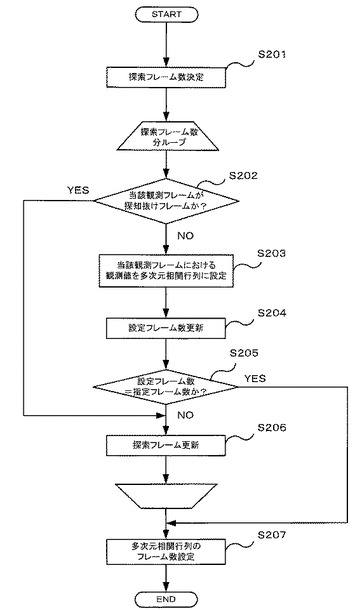
ここで、図3のステップS200では、多次元相関行列生成部121は、利用する最大フレーム数である探索フレーム数(探索フレーム数NS)、及び多次元相関行列の設定フレーム数(Ni)を、次の式(9),(10)のように設定する(ステップS201)。
【0036】
【数8】
【0037】
そして、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであるか否かを判定する(ステップS202)。このときに、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームでないことを確認した場合には、全航跡候補の当該観測フレームにおける観測値を多次元相関行列に設定する(ステップS203)。そして、多次元相関行列生成部121は、設定フレーム数を次の式(11)のように更新する(ステップS204)。
【0038】
【数9】
【0039】
この後、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達したか否かを判定する(ステップS205)。このときに、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達したことを確認した場合には、探査ループから抜ける。
【0040】
これに対して、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達していないことを確認した場合(ステップS205のNO方向)、又は当該フレームが探知抜けフレームであることを確認した場合(ステップS202のYES方向)には、探索フレームを1つ過去のフレームに更新し(ステップSS206)、探索ループにより、ステップS202からの処理を繰り返す。
【0041】
そして、多次元相関行列生成部121は、設定フレーム数が指定フレーム数に達したことを確認した場合、又は設定フレーム数が探索フレーム数(上限フレーム数)に達したことを確認した場合には、設定フレーム数を多次元相関行列のフレーム数とし(ステップS207)、図2のステップS107へ移行する。
【0042】
ステップS107では、多次元相関行列生成部121は、多次元相関行列に設定されている各航跡候補に対応するコストとして、ステップS104で算出したコストを設定する。この後、多次元相関決定部131は、多次元相関行列生成部121によって生成された多次元相関行列を用いて多次元の相関決定を行い、尤もらしい航跡候補の組み合わせを抽出する(ステップS108)。
【0043】
そして、航跡決定部141は、図2,3の一連の処理で使用した全ての航跡候補のうち、多次元相関決定部131によって抽出された航跡候補の組み合わせに含まれる航跡候補と、指定フレーム数(探知抜けフレームを除く)分割り当てられた観測値が同一である航跡候補以外を削除し、残った航跡候補を次の観測フレーム(k+1フレーム目)での既存の航跡候補として保持する。また、航跡決定部141は、抽出された航跡候補に目標番号が付与されておらず、かつ尤度が一定閾値以上である場合には、その航跡候補を確立航跡とし、目標番号を付与する(ステップS109)。
【0044】
平滑値算出部151は、次フレームの既存の航跡候補とした航跡候補について、現在のフレーム(kフレーム目)での平滑値を算出する(ステップS110)。また、平滑値算出部151は、平滑値の算出処理を、次フレームでの既存の航跡候補のそれぞれについて実行する(航跡候補分ループする)。そして、その算出した平滑値を表示装置300へ送り、目標追尾装置100の一連の処理が終了する。
【0045】
ここで、平滑値算出部151による平滑値の算出処理において、追尾フィルタに線形カルマンフィルタを用いた場合に、nフレーム目における平滑値xn(+)、平滑誤差共分散行列Pn(+)、ゲインK(n)は、次の式(12)〜(14)に示すように記述できる。
【0046】
【数10】
なお、平滑値を求める方法としては、線形カルマンフィルタを用いる他に、例えば、指定フレーム数分の観測値からの線形最小自乗法等を用いることもできる。
【0047】
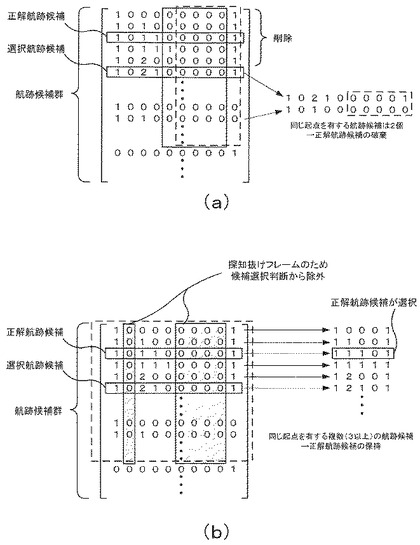
次に、実施の形態1の目標追尾装置100と従来装置とを対比して説明する。図4は、実施の形態1の目標追尾装置100及び従来装置のそれぞれの航跡候補選択動作を対比して説明するための説明図である。図4(a)は、従来装置における航跡候補抽出動作を示し、図4(b)は、実施の形態1の目標追尾装置100の航跡候補抽出動作を示す。
【0048】
従来装置では、図4(a)に示すように、判断対象の破線枠の5フレームの指定フレームのうち探知フレームが大多数を占めており、判断対象の航跡候補は2種類である。このため、既存の航跡候補として保持される航跡候補が、同じ起点を有する2つの航跡候補となり、正解航跡候補が保持されずに破棄されてしまう。
【0049】
これに対して、実施の形態1の目標追尾装置100では、図4(b)に示すように、探知抜けフレームについては除外して、航跡候補群から航跡候補を選択し、同じ起点を有する3つ以上の航跡候補が既存の航跡候補として保持される。この結果、実施の形態1の目標追尾装置100では、正解航跡候補が保持される。
【0050】
従って、実施の形態1の目標追尾装置によれば、多次元相関行列生成部121が、多次元相関行列を生成する際に、選択した観測フレームが探知抜けフレームであれば、その探知抜けフレームを除外して、探知抜けフレームよりも前の観測フレームを選択する。この構成により、探知抜けフレームを多次元の相関決定の観測フレームに含めないことで探知状況に合わせて自動的に多次元の相関決定に用いる絶対的なフレーム数を変化させ、航跡候補の区別ができるようにして多くの航跡候補を残すことが可能となる。この結果、正解航跡候補を含めた航跡候補を適切に生成保持することができる。よって、新たに観測値が得られた場合に多次元の相関決定において正解航跡が抽出されるようになり、相関性能を向上させることができる。
【0051】
これに加えて、センサ200の探知状況が良好な場合においては、指定フレーム数の観測フレームを利用して、航跡候補を生成するので、過去の観測値の影響を受けにくいことにより、目標物の高機動運動に対する追従性の低下を抑えることができ、探知状況によらず高い追尾精度を維持することができる。
【0052】
また、最新の観測フレームからの探知抜けフレームを含めた観測フレームの個数が、探索フレーム数(上限フレーム数)に達した場合には、探知抜けフレームをも選択し、選択した探知フレーム及び探知抜けフレームを用いて多次元相関行列を生成する。この構成により、探知抜けフレームが比較的長く連続するような状況下においても、過去の観測値の影響を受けにくくすることができる。
【0053】
なお、実施の形態1の目標追尾装置100の動作においては、図3の探索フレーム数分のループ処理を省略することもできる。
【0054】
実施の形態2.
先の実施の形態1では、全航跡候補を1つの多次元相関行列として多次元の相関決定処理を実行していた。しかしながら、航跡候補が観測値を共有しないような場合には、多次元相関行列を個別に生成し、多次元の相関決定処理を実行することによって、多次元相関行列の要素数を減少させ、多次元の相関決定処理に要する演算負荷を抑えることが可能である。この発明の実施の形態2では、観測値を共有する航跡候補の集合であるクラスタを用いて、探知抜けフレームを除いたフレームでの多次元の相関決定を実行するための形態について説明する。
【0055】
図5は、この発明の実施の形態2による目標追尾装置100を示すブロック図である。図5において、実施の形態2の目標追尾装置100は、実施の形態1の目標追尾装置100の構成に加えて、クラスタ生成統合分離部(クラスタ処理部)161及び統合時フレーム数ルール設定部171をさらに有している。なお、目標追尾装置100のハードウェアの記憶部には、クラスタ生成統合分離部161及び統合時フレーム数ルール設定部171の機能を実現するためのプログラムがさらに格納されている。
【0056】
クラスタ生成統合分離部161は、複数のクラスタに存在する航跡が同一観測値と相関がとれた場合にクラスタを統合する。また、クラスタ生成統合分離部161は、どのクラスタの航跡候補とも相関がとれない観測値について新たにクラスタを生成する。さらに、クラスタ生成統合分離部161は、クラスタ内で観測値を取り合わない航跡候補が生成された場合には各航跡を異なるクラスタに分離する。実施の形態2の多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタの操作(統合・分離・生成)がされた際に、多次元の相関決定のためのフレーム数を設定し、新たに多次元相関行列を生成する。
【0057】
ここで、クラスタの統合時には、各クラスタでの探知抜けフレームが異なるため、多次元相関行列で利用する観測フレーム数が統合前と大きく異なる場合がある。この場合、指定フレーム数で観測値の割り当てでは区別がつかない航跡候補が発生する。そこで、多次元相関行列生成時に、指定フレーム内で区別がつかない航跡候補を削除するか、多次元の相関決定では一時的にそのフレーム数を長くして、多次元の相関決定後に指定フレーム内での航跡決定を実行するかのどちらかの処理を実行する。このどちらの処理を実行するかについては、統合時フレーム数ルール設定部171が設定し、その設定に応じて、多次元相関行列生成部121がいずれかの処理を行い、多次元相関行列を生成する。
【0058】
次に、動作について説明する。ここで、実施の形態2の目標追尾装置100の動作は、クラスタの操作に関する処理であるステップS301〜S305が追加されている点が実施の形態1の動作とは異なっている。ここでは、実施の形態1との違いについて説明する。図6は、図5の目標追尾装置100の動作を示すフローチャートである。なお、目標追尾装置100の各機能は、図6のステップS102〜110,S200,S302〜S306の処理をクラスタ毎に行う。
【0059】
図6において、観測値割当部111がセンサ200から新たに観測値を取得すると(ステップS101)、予測値算出部152、観測値割当部111及びコスト算出部112がステップS102〜S104のそれぞれの処理を行う。そして、クラスタ生成統合分離部161は、クラスタ操作を行う(ステップS301)。
【0060】
具体的に、クラスタ生成統合分離部161は、複数のクラスタに存在する航跡候補が同一観測値と相関がとれた場合には、観測値を共有する航跡を有するクラスタを統合し一つのクラスタとする。また、クラスタ生成統合分離部161は、どのクラスタの航跡とも相関がとれない観測値について、新たにクラスタを生成する。さらに、クラスタ生成統合分離部161は、クラスタ内で観測値を取り合わない航跡が生成された場合には、各航跡を別のクラスタに分離する。
【0061】
この後、多次元相関行列生成部121は、当該観測フレームにおけるクラスタ操作を判別する(ステップS302)。このときに、クラスタ操作が「操作なし」、「クラスタ生成」又は「クラスタ分離」である場合には、目標追尾装置100の各機能は、それぞれのクラスタ内で、実施の形態1と同様にステップS105〜S110・S200の処理を行う。
【0062】
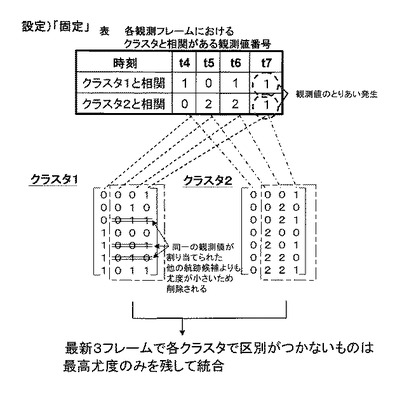
他方、クラスタ操作が「クラスタ統合」である場合には、多次元相関行列生成部121は、統合時フレーム数ルール設定部171のルール設定に応じて、当該観測フレームにおける指定フレーム数を決定する(ステップS303)。そして、多次元相関行列生成部121は、多次元相関行列の設定処理を行って、指定フレーム数に応じた多次元相関行列を、先の図3に示す観測値割当処理を実行して生成する(ステップS304)。そして、多次元相関行列生成部121は、統合時フレーム数ルール設定部171のルールが「可変」であるか「固定」であるかを確認する(ステップS305)。
【0063】
ここで、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100(計算機)の演算負荷の許容量が大きい場合には「可変」を設定し、その許容量が少ない場合には「固定」を設定する。具体的に、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100の演算負荷の許容量と、事前に設定されたルール設定用パラメータとを用いた演算により、ルールを「固定」及び「可変」のいずれかに設定する。なお、観測値が存在していることがクラスタ統合前提条件であることから、クラスタ統合が発生した場合に、当該観測フレームが探知抜けフレームとなることはない。
【0064】
そして、ルールが「固定」の場合、多次元相関行列生成部121は、多次元相関行列において同一の観測値が割り当てられている複数の航跡候補が存在する場合に、その中から最高尤度の航跡候補を残して、他の航跡を削除する(ステップS306)。そして、目標追尾装置100の各機能は、ステップS107〜ステップS109のコスト決定から航跡決定までの処理を実行し、ステップS110へ移行する。
【0065】
他方、ルールが「可変」の場合、多次元相関行列生成部121は、多次元相関行列において同一の観測値が複数の航跡候補に割り当てられることはないことから、目標追尾装置100の各機能は、ステップS107〜ステップS109のコスト決定から航跡決定までの処理を実行し、ステップS110へ移行する。
【0066】
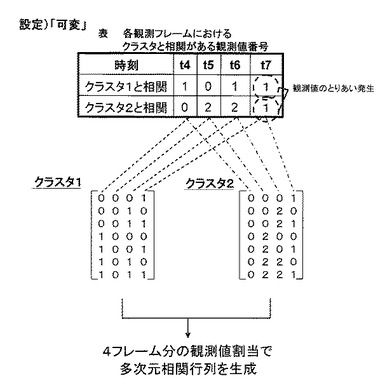
従って、図7,8に示すように、目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した際には、ルールが「固定」の場合と、ルールが「可変」とで、異なる処理がされる。そして、ステップS110では、平滑値算出部151は、最終的に残った航跡候補の当該観測フレームにおける平滑値を算出する。
【0067】
上記のような実施の形態2の目標追尾装置によれば、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成する。また、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ統合の際には、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、多次元相関行列を生成する。この構成により、各クラスタの探知抜けフレームの発生状況の違いからクラスタ統合において多次元相関行列を生成する場合や、前回からの航跡候補を全て残す場合等の多次元相関行列のフレーム数を一時的に長くする必要が生じた場合に、その状況に対応した多次元相関行列を生成することができる。
【0068】
また、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ統合の際には、統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、クラスタ生成統合分離部161によるクラスタ統合とともに当該複数のクラスタのそれぞれの多次元相関行列を結合し、統合時フレーム数の多次元相関行列を生成する。この構成により、目標追尾装置100の許容負荷の制限によって長いフレーム数の多次元の相関決定を実行できない場合には、多次元相関行列の生成時に前回からの航跡候補が削除されることから、目標追尾装置100の許容負荷に対応する多次元相関行列を生成することができる。
【0069】
さらに、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100の演算負荷の許容量と、ルール設定用パラメータとを用いた演算により、ルールを「固定」及び「可変」のいずれかに設定する。そして、多次元相関行列生成部121は、統合時フレーム数ルール設定部171により設定されたルールに対応する多次元相関行列を生成する。この構成により、多次元相関行列のフレーム数を一時的に長くする必要が生じた場合や、目標追尾装置100の許容負荷の制限によって長いフレーム数の多次元の相関決定を実行できない場合の異なる状況に対応した多次元相関行列を生成することができ、目標追尾装置100の演算負荷の許容量を超えることなく、その許容量の範囲内で最も良い精度の多次元の相関決定の結果を出力することができる。
【0070】
なお、実施の形態2では、多次元相関行列生成部121が図7,8に示すような2つの方式の多次元相関行列の生成処理を実行可能となっていた。しかしながら、多次元相関行列生成部121は、いずれか一方の方式の多次元相関行列の生成処理のみを実行可能であってもよい。この場合の目標追尾装置100の構成は、統合時フレーム数ルール設定部171を省略した構成となる。
【符号の説明】
【0071】
100 目標追尾装置、110 航跡候補生成処理系(航跡候補生成処理部)、111 観測値割当部、112 コスト算出部、121 多次元相関行列生成部、131 多次元相関決定部、141 航跡決定部、150 航跡候補追尾処理系(航跡候補追尾処理部)、151 平滑値算出部、152 予測値算出部、161 クラスタ生成統合分離部(クラスタ処理部)、171 統合時フレーム数ルール設定部、200 センサ、300 表示装置。
【技術分野】
【0001】
この発明は、例えばレーダ等のセンサシステムに用いられ、センサからの目標位置についての観測値に基づいて目標の航跡を生成する目標追尾装置に関する。
【背景技術】
【0002】
目標追尾装置では、一般的に、センサからの目標位置の観測値を用いて目標の航跡を生成する際の相関を多次元的に解く技術が使用される。このような技術では、探知状況が比較的良好な場合には、所定の指定フレーム数で多次元の相関決定が行われる。他方、探知状況が比較的悪く探知抜けが多く発生している場合には、指定フレーム数内の観測フレーム数で航跡候補の区別がつかずに正解航跡が破棄されるような状況において、指定フレーム数を超えた数の観測フレームを用いて、多次元の相関決定を行う。即ち、各探知状況に応じて、航跡候補の推定に用いる観測フレーム数を自動的に変化させる。このように、各探知状況に応じた適切な観測フレーム数で相関決定を行うことによって、比較的精度のよい目標追尾を実現する。
【0003】
この多次元的に相関を解く技術としては、複数サンプリング時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムである複数フレーム割当法がある(例えば、特許文献1及び非特許文献1参照)。このような複数フレーム割当法では、既存航跡とNフレーム時刻に跨る観測値との相関決定をN次元の割当問題に変換して解く。このN次元割当問題は、以下の(1)のように表すことができる。
【0004】
【数1】
【0005】
この式(1)のCi2・・・CiN+1は、既存航跡及び観測値i1・・・iN+1から航跡を生成する際に用いられる航跡尤度に関するコストであり、通常航跡尤度の逆数の対数値である。変数zi1・・・ziN+1は、次の式(2)の通りである。また、(1)の割当問題には、次の式(3)のような制約条件がある。
【0006】
【数2】
【0007】
ここで、nフレーム目における航跡候補は、前回(n−1フレーム目)の航跡候補xn−1(+)を基に算出された予測値xn(−)から、相関関係にある当該フレームの観測値を割り当てることで更新される。ここでは、一例として、線形カルマンフィルタを想定した場合の航跡候補の更新、及び残差共分散行列を用いた相関判定について、簡単に説明する。
【0008】
航跡候補のxn−1(+)のnフレームでの予測値は、n−1からnフレームにおける推移行列をΦ(n−1)、nフレームでの観測行列をH(n)とすると、次の式(4)の通りである。
【数3】
【0009】
また、n−1フレームでの平滑誤差共分散行列Pn−1(+)、駆動雑音行列Q(n−1)から予測誤差共分散行列Pn(−)は、次の式(5)の通りである。
【数4】
【0010】
残差共分散行列Snは、観測誤差共分散行列Bnを用いて以下の式(6)のように求まる。
【数5】
【0011】
そして、複数フレーム割当法では、残差行分散行列Snを用いて、以下の式(7)が成立する場合に、航跡候補と観測値z(n)は相関があると判定する。ここで、dはゲートサイズであり観測値の持つ自由度Mのカイ2乗分布表から定められる事前に設定されたパラメータである。
【数6】
【0012】
nフレームにおける航跡候補i(尤度γi)がn−1フレームにおける航跡候補l(尤度γl)から生成されたとすると、探知確率PD、ゲート捕捉率PG及び航跡候補生成における観測値との相関度gi,lを用いた際に、探知抜けによる航跡候補の生成における尤度γi,0と、観測値による航跡候補の生成における尤度γi,lとは、以下の式(8)の通りである。そして、更新された各航跡候補の尤度は、式(8)の演算処理により更新される。
【数7】
【0013】
なお、既存航跡候補と観測値の割り当て結果とを用いた相関決定の処理を効率化させるための技術としては、互いに観測値を共有する航跡候補からなるクラスタを生成し、クラスタ毎に処理を実行する方式がある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2007−212244号公報
【特許文献2】特開平8−271617号公報
【非特許文献】
【0015】
【非特許文献1】A.B.Poore and A.J.RobertsonIII "A New Lagrangian Relaxation Based Algorithm for a Class of Multidimensional Assignment Problems" Computational Optimization and Applications, 8, 129-150, 1997.
【発明の概要】
【発明が解決しようとする課題】
【0016】
特許文献1及び非特許文献1のような複数フレーム割当法を用いた従来の目標追尾装置では、探知抜けフレームも多次元の相関決定に利用されていた。このため、指定フレーム数内で多次元の相関決定の観測フレームに探知抜けフレームが比較的多く含まれている場合に、その指定フレーム数内で航跡候補の区別がつかず指定フレーム数内で起点となる観測値が同一である航跡候補が複数存在しても、1フレーム前に選択された航跡候補のみを抽出し、他の航跡候補を削除せざるを得なかった。
【0017】
この結果、一時的な尤度の低下により選択されなかった正解航跡候補(目標信号からなる観測値を多く有する航跡)が次フレームの観測値を割り当てる前に削除されてしまい、各フレームで割り当てられた観測値の組み合わせが目標らしいと判断されるまでの時間である航跡確立の時間が長くなったり、追尾維持(確立した航跡と目標からなる観測値とを各フレームで割り当てる)に失敗したりするといった現象が発生していた。
【0018】
ここで、図9,10に、従来装置における追尾確立が遅延する様子を示す。図9の表は、各フレームでの観測値数、及びその観測値が目標からか不要信号かを示す。また、図9の行列は、各航跡候補の各フレームでの観測値の割当を示し、指定フレーム数(この例では5フレーム)では航跡候補の区別がつかず正解航跡が削除される様子を示す。図10の航跡グラフにおいて、図9の探知状況及び行列のような情報を用いた場合には、航跡確立が遅延していることがわかる。
【0019】
また、従来装置において、正解航跡候補の破棄を回避するために単純に指定フレーム数を多くした場合には、探知状況がよく探知抜けが発生せずに少ない指定フレーム数で十分航跡候補が区別できるにもかかわらず、長い指定フレーム数となることで不要に航跡候補が多くなる。この結果、過去の観測フレームを多く使うことにより過去の情報の影響を強く受けることから、例えば旋回等の高機動運動への追従性が損なわれたり、演算負荷が増大したりするという問題が生じる。
【0020】
具体的に、図11の矢示Aのように、目標物の旋回動作等の高機動運動が生じた場合に、10フレーム分の観測値を利用するときには、矢示Bのように、過去の観測値の影響を受けて目標の運動に対する追従性が低下し、目標物が直進しているものとして追尾確立してしまうこととなり、追尾精度が低下してしまう。なお、5フレーム分の観測値を利用するときには、矢示Cのように、比較的良好な追従性を示すこととなる。
【0021】
この発明は、上記のような課題を解決するためになされたものであり、正解航跡候補を含めた航跡候補を適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を得ることを目的とする。
【課題を解決するための手段】
【0022】
この発明に係る目標追尾装置は、センサの観測値を用いて目標物の航跡を推定するものであって、前記センサの観測値を取得し、その取得した観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新し、その更新した航跡候補についての尤度に関する指標であるコストを算出する航跡候補生成部と、前記センサの観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択し、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する多次元相関行列生成部と、前記多次元相関行列生成部によって生成された前記多次元相関行列を用いて、多次元の相関決定を行い、当該観測フレームで航跡候補の組み合わせを抽出する多次元相関決定部と、抽出された航跡候補の組み合わせを次の観測フレームでの既存の航跡候補として設定するとともに、抽出された航跡候補について航跡確立する航跡決定部と、次の観測フレームでの既存の航跡候補について、航跡表示用の平滑値と、次の観測フレームで取得する観測値を当該既存の航跡候補に割り当てるための予測値とを算出する航跡候補追尾処理部とを備え、前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、選択した観測フレームが、航跡候補に割り当てられる観測値が存在しない探知抜けフレームであれば、その探知抜けフレームを除外して、航跡候補に割り当てられる観測値が存在する前記指定フレーム数の探知フレームを選択するために、前記探知抜けフレームよりも前の観測フレームを選択するものである。
【発明の効果】
【0023】
この発明に係る目標追尾装置によれば、多次元相関行列生成部が、多次元相関行列を生成する際に、選択した観測フレームが探知抜けフレームであれば、その探知抜けフレームを除外して、探知抜けフレームよりも前の観測フレームを選択するので、探知抜けフレームを多次元の相関決定の観測フレームに含めないことで探知状況に合わせて自動的に多次元の相関決定に用いる絶対的なフレーム数を変化させ、航跡候補の区別ができるようにして多くの航跡候補を残すことが可能となることにより、正解航跡候補を含めた航跡候補を適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる。
【図面の簡単な説明】
【0024】
【図1】この発明の実施の形態1による目標追尾装置を示すブロック図である。
【図2】図1の目標追尾装置の動作を示すフローチャートである。
【図3】図1の目標追尾装置の動作を示すフローチャートである。
【図4】実施の形態1の目標追尾装置及び従来装置のそれぞれの航跡候補選択動作を対比して説明するための説明図である。
【図5】この発明の実施の形態2による目標追尾装置を示すブロック図である。
【図6】図5の目標追尾装置の動作を示すフローチャートである。
【図7】目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した場合の処理を説明するための説明図である。
【図8】目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した場合の処理を説明するための説明図である。
【図9】従来装置における追尾確立が遅延する様子を説明するための説明図である。
【図10】従来装置における追尾確立が遅延する様子を説明するための説明図である。
【図11】指定フレームのフレーム長を長くした場合の追尾確立の様子を説明するための説明図である。
【発明を実施するための形態】
【0025】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1による目標追尾装置を示すブロック図である。
図1において、目標追尾装置100は、例えばレーダ等のセンサ200及び例えばモニタ等の表示装置300に接続されている。また、目標追尾装置100は、航跡候補生成処理系(航跡候補生成処理部)110、多次元相関行列生成部121、多次元相関決定部131、航跡決定部141及び航跡候補追尾処理系(航跡候補追尾処理部)150を有している。
【0026】
航跡候補生成処理系110は、観測値割当部111及びコスト算出部112を含んでいる。観測値割当部111は、航跡候補追尾処理系150から受けた予測値を用いて、センサ200から受けた観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新する。また、コスト算出部112は、観測値割当部111によって更新された各航跡候補について、航跡尤度の逆数の対数値であるコスト(航跡尤度に関するコスト)を算出する。このコストは、予測値に対して観測値が尤もらしいかどうか(信頼度が高いか否か)を判別するための指標である。
【0027】
多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。そして、多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。
【0028】
ここで、多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前(過去)の観測フレームを選択する。即ち、多次元相関行列生成部121は、探知抜けフレームを多次元相関行列の観測フレームから除外することによって、全航跡候補と相関する観測値が存在する探知フレームを指定フレーム数分選択する。
【0029】
多次元相関決定部131は、多次元相関行列生成部121によって生成された多次元相関行列を用いて多次元の相関決定を行い、当該観測フレームでの尤もらしい航跡候補の組み合わせを抽出する。航跡決定部141は、多次元相関決定部131によって抽出された航跡候補の組み合わせと、指定フレーム数(探知抜けフレームを除く)の前までの割り当てられた観測値が同一である航跡候補以外を削除し、残った航跡候補を次の観測フレームでの既存の航跡候補(選択航跡候補)として保持する。また、航跡決定部141は、抽出された航跡候補に、目標番号が付与されておらず、かつその航跡候補に対応する尤度が一定閾値(事前に設定されたパラメータ)を超えた場合には、航跡を確立し、その航跡候補に目標番号を付与する。
【0030】
航跡候補追尾処理系150は、平滑値算出部151及び予測値算出部(航跡選択モデル参照部)152を含んでいる。平滑値算出部151は、航跡決定部141によって保持されている航跡候補の(航跡表示用の)平滑値を算出する。また、平滑値算出部151は、航跡決定部141によって目標番号が付与され、多次元相関決定部131によって抽出された航跡候補についての平滑値を表示装置300に送り、その航跡候補についての平滑値を表示装置300に表示させる。予測値算出部152は、先の式(4)を用いた演算処理を行い、当該フレームの各既存航跡候補の予測値を算出する。
【0031】
ここで、目標追尾装置100は、演算処理部(CPU)、記憶部(ROM、RAM等)及び信号入出力部を持ったハードウェア(図示せず)により構成することができる。目標追尾装置100のハードウェアの記憶部には、航跡候補生成処理系110、多次元相関行列生成部121、多次元相関決定部131、航跡決定部141及び航跡候補追尾処理系150の機能を実現するためのプログラムが格納されている。
【0032】
次に、動作について説明する。図2,3は、図1の目標追尾装置100の動作を示すフローチャートである。ここでは、センサ200が新たに生成した観測値に対応する観測フレームをkフレームとし、このkフレーム目の処理について説明する。図2,3において、目標追尾装置100の観測値割当部111は、センサ200からkフレーム目の観測値を取得する(ステップS101)。また、予測値算出部152は、先の式(4)を用いた演算処理を行うことによって、kフレーム目の各既存航跡候補の予測値を算出し、その算出した予測値を観測値割当部111へ送る(ステップS102)。
【0033】
そして、観測値割当部111は、kフレーム目の観測値及び予測値から、航跡と観測値との割当を行う(ステップS103)。この後、コスト算出部112は、その割り当てられた観測値を用いて航跡候補を生成し、既存の航跡候補と観測値の相関度から算出した航跡候補の尤度から、航跡候補のコストを算出する(ステップS104)。なお、予測値算出部152、観測値割当部111及びコスト算出部112は、ステップS102〜S104の処理を、複数の航跡候補のそれぞれについて実行する(航跡候補分ループする)。
【0034】
多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであるか否かを判定する(ステップS105)。このときに、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームでないことを確認した場合には、図3に示す多次元相関行列の設定処理を行う(ステップS200)。他方、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであることを確認した場合には、前回の処理で割り当てられた観測値を流用し(ステップS106)、ステップS107へ移行する。
【0035】
ここで、図3のステップS200では、多次元相関行列生成部121は、利用する最大フレーム数である探索フレーム数(探索フレーム数NS)、及び多次元相関行列の設定フレーム数(Ni)を、次の式(9),(10)のように設定する(ステップS201)。
【0036】
【数8】
【0037】
そして、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームであるか否かを判定する(ステップS202)。このときに、多次元相関行列生成部121は、当該観測フレームが探知抜けフレームでないことを確認した場合には、全航跡候補の当該観測フレームにおける観測値を多次元相関行列に設定する(ステップS203)。そして、多次元相関行列生成部121は、設定フレーム数を次の式(11)のように更新する(ステップS204)。
【0038】
【数9】
【0039】
この後、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達したか否かを判定する(ステップS205)。このときに、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達したことを確認した場合には、探査ループから抜ける。
【0040】
これに対して、多次元相関行列生成部121は、設定フレーム数が多次元の相関決定の指定フレーム数に達していないことを確認した場合(ステップS205のNO方向)、又は当該フレームが探知抜けフレームであることを確認した場合(ステップS202のYES方向)には、探索フレームを1つ過去のフレームに更新し(ステップSS206)、探索ループにより、ステップS202からの処理を繰り返す。
【0041】
そして、多次元相関行列生成部121は、設定フレーム数が指定フレーム数に達したことを確認した場合、又は設定フレーム数が探索フレーム数(上限フレーム数)に達したことを確認した場合には、設定フレーム数を多次元相関行列のフレーム数とし(ステップS207)、図2のステップS107へ移行する。
【0042】
ステップS107では、多次元相関行列生成部121は、多次元相関行列に設定されている各航跡候補に対応するコストとして、ステップS104で算出したコストを設定する。この後、多次元相関決定部131は、多次元相関行列生成部121によって生成された多次元相関行列を用いて多次元の相関決定を行い、尤もらしい航跡候補の組み合わせを抽出する(ステップS108)。
【0043】
そして、航跡決定部141は、図2,3の一連の処理で使用した全ての航跡候補のうち、多次元相関決定部131によって抽出された航跡候補の組み合わせに含まれる航跡候補と、指定フレーム数(探知抜けフレームを除く)分割り当てられた観測値が同一である航跡候補以外を削除し、残った航跡候補を次の観測フレーム(k+1フレーム目)での既存の航跡候補として保持する。また、航跡決定部141は、抽出された航跡候補に目標番号が付与されておらず、かつ尤度が一定閾値以上である場合には、その航跡候補を確立航跡とし、目標番号を付与する(ステップS109)。
【0044】
平滑値算出部151は、次フレームの既存の航跡候補とした航跡候補について、現在のフレーム(kフレーム目)での平滑値を算出する(ステップS110)。また、平滑値算出部151は、平滑値の算出処理を、次フレームでの既存の航跡候補のそれぞれについて実行する(航跡候補分ループする)。そして、その算出した平滑値を表示装置300へ送り、目標追尾装置100の一連の処理が終了する。
【0045】
ここで、平滑値算出部151による平滑値の算出処理において、追尾フィルタに線形カルマンフィルタを用いた場合に、nフレーム目における平滑値xn(+)、平滑誤差共分散行列Pn(+)、ゲインK(n)は、次の式(12)〜(14)に示すように記述できる。
【0046】
【数10】
なお、平滑値を求める方法としては、線形カルマンフィルタを用いる他に、例えば、指定フレーム数分の観測値からの線形最小自乗法等を用いることもできる。
【0047】
次に、実施の形態1の目標追尾装置100と従来装置とを対比して説明する。図4は、実施の形態1の目標追尾装置100及び従来装置のそれぞれの航跡候補選択動作を対比して説明するための説明図である。図4(a)は、従来装置における航跡候補抽出動作を示し、図4(b)は、実施の形態1の目標追尾装置100の航跡候補抽出動作を示す。
【0048】
従来装置では、図4(a)に示すように、判断対象の破線枠の5フレームの指定フレームのうち探知フレームが大多数を占めており、判断対象の航跡候補は2種類である。このため、既存の航跡候補として保持される航跡候補が、同じ起点を有する2つの航跡候補となり、正解航跡候補が保持されずに破棄されてしまう。
【0049】
これに対して、実施の形態1の目標追尾装置100では、図4(b)に示すように、探知抜けフレームについては除外して、航跡候補群から航跡候補を選択し、同じ起点を有する3つ以上の航跡候補が既存の航跡候補として保持される。この結果、実施の形態1の目標追尾装置100では、正解航跡候補が保持される。
【0050】
従って、実施の形態1の目標追尾装置によれば、多次元相関行列生成部121が、多次元相関行列を生成する際に、選択した観測フレームが探知抜けフレームであれば、その探知抜けフレームを除外して、探知抜けフレームよりも前の観測フレームを選択する。この構成により、探知抜けフレームを多次元の相関決定の観測フレームに含めないことで探知状況に合わせて自動的に多次元の相関決定に用いる絶対的なフレーム数を変化させ、航跡候補の区別ができるようにして多くの航跡候補を残すことが可能となる。この結果、正解航跡候補を含めた航跡候補を適切に生成保持することができる。よって、新たに観測値が得られた場合に多次元の相関決定において正解航跡が抽出されるようになり、相関性能を向上させることができる。
【0051】
これに加えて、センサ200の探知状況が良好な場合においては、指定フレーム数の観測フレームを利用して、航跡候補を生成するので、過去の観測値の影響を受けにくいことにより、目標物の高機動運動に対する追従性の低下を抑えることができ、探知状況によらず高い追尾精度を維持することができる。
【0052】
また、最新の観測フレームからの探知抜けフレームを含めた観測フレームの個数が、探索フレーム数(上限フレーム数)に達した場合には、探知抜けフレームをも選択し、選択した探知フレーム及び探知抜けフレームを用いて多次元相関行列を生成する。この構成により、探知抜けフレームが比較的長く連続するような状況下においても、過去の観測値の影響を受けにくくすることができる。
【0053】
なお、実施の形態1の目標追尾装置100の動作においては、図3の探索フレーム数分のループ処理を省略することもできる。
【0054】
実施の形態2.
先の実施の形態1では、全航跡候補を1つの多次元相関行列として多次元の相関決定処理を実行していた。しかしながら、航跡候補が観測値を共有しないような場合には、多次元相関行列を個別に生成し、多次元の相関決定処理を実行することによって、多次元相関行列の要素数を減少させ、多次元の相関決定処理に要する演算負荷を抑えることが可能である。この発明の実施の形態2では、観測値を共有する航跡候補の集合であるクラスタを用いて、探知抜けフレームを除いたフレームでの多次元の相関決定を実行するための形態について説明する。
【0055】
図5は、この発明の実施の形態2による目標追尾装置100を示すブロック図である。図5において、実施の形態2の目標追尾装置100は、実施の形態1の目標追尾装置100の構成に加えて、クラスタ生成統合分離部(クラスタ処理部)161及び統合時フレーム数ルール設定部171をさらに有している。なお、目標追尾装置100のハードウェアの記憶部には、クラスタ生成統合分離部161及び統合時フレーム数ルール設定部171の機能を実現するためのプログラムがさらに格納されている。
【0056】
クラスタ生成統合分離部161は、複数のクラスタに存在する航跡が同一観測値と相関がとれた場合にクラスタを統合する。また、クラスタ生成統合分離部161は、どのクラスタの航跡候補とも相関がとれない観測値について新たにクラスタを生成する。さらに、クラスタ生成統合分離部161は、クラスタ内で観測値を取り合わない航跡候補が生成された場合には各航跡を異なるクラスタに分離する。実施の形態2の多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタの操作(統合・分離・生成)がされた際に、多次元の相関決定のためのフレーム数を設定し、新たに多次元相関行列を生成する。
【0057】
ここで、クラスタの統合時には、各クラスタでの探知抜けフレームが異なるため、多次元相関行列で利用する観測フレーム数が統合前と大きく異なる場合がある。この場合、指定フレーム数で観測値の割り当てでは区別がつかない航跡候補が発生する。そこで、多次元相関行列生成時に、指定フレーム内で区別がつかない航跡候補を削除するか、多次元の相関決定では一時的にそのフレーム数を長くして、多次元の相関決定後に指定フレーム内での航跡決定を実行するかのどちらかの処理を実行する。このどちらの処理を実行するかについては、統合時フレーム数ルール設定部171が設定し、その設定に応じて、多次元相関行列生成部121がいずれかの処理を行い、多次元相関行列を生成する。
【0058】
次に、動作について説明する。ここで、実施の形態2の目標追尾装置100の動作は、クラスタの操作に関する処理であるステップS301〜S305が追加されている点が実施の形態1の動作とは異なっている。ここでは、実施の形態1との違いについて説明する。図6は、図5の目標追尾装置100の動作を示すフローチャートである。なお、目標追尾装置100の各機能は、図6のステップS102〜110,S200,S302〜S306の処理をクラスタ毎に行う。
【0059】
図6において、観測値割当部111がセンサ200から新たに観測値を取得すると(ステップS101)、予測値算出部152、観測値割当部111及びコスト算出部112がステップS102〜S104のそれぞれの処理を行う。そして、クラスタ生成統合分離部161は、クラスタ操作を行う(ステップS301)。
【0060】
具体的に、クラスタ生成統合分離部161は、複数のクラスタに存在する航跡候補が同一観測値と相関がとれた場合には、観測値を共有する航跡を有するクラスタを統合し一つのクラスタとする。また、クラスタ生成統合分離部161は、どのクラスタの航跡とも相関がとれない観測値について、新たにクラスタを生成する。さらに、クラスタ生成統合分離部161は、クラスタ内で観測値を取り合わない航跡が生成された場合には、各航跡を別のクラスタに分離する。
【0061】
この後、多次元相関行列生成部121は、当該観測フレームにおけるクラスタ操作を判別する(ステップS302)。このときに、クラスタ操作が「操作なし」、「クラスタ生成」又は「クラスタ分離」である場合には、目標追尾装置100の各機能は、それぞれのクラスタ内で、実施の形態1と同様にステップS105〜S110・S200の処理を行う。
【0062】
他方、クラスタ操作が「クラスタ統合」である場合には、多次元相関行列生成部121は、統合時フレーム数ルール設定部171のルール設定に応じて、当該観測フレームにおける指定フレーム数を決定する(ステップS303)。そして、多次元相関行列生成部121は、多次元相関行列の設定処理を行って、指定フレーム数に応じた多次元相関行列を、先の図3に示す観測値割当処理を実行して生成する(ステップS304)。そして、多次元相関行列生成部121は、統合時フレーム数ルール設定部171のルールが「可変」であるか「固定」であるかを確認する(ステップS305)。
【0063】
ここで、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100(計算機)の演算負荷の許容量が大きい場合には「可変」を設定し、その許容量が少ない場合には「固定」を設定する。具体的に、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100の演算負荷の許容量と、事前に設定されたルール設定用パラメータとを用いた演算により、ルールを「固定」及び「可変」のいずれかに設定する。なお、観測値が存在していることがクラスタ統合前提条件であることから、クラスタ統合が発生した場合に、当該観測フレームが探知抜けフレームとなることはない。
【0064】
そして、ルールが「固定」の場合、多次元相関行列生成部121は、多次元相関行列において同一の観測値が割り当てられている複数の航跡候補が存在する場合に、その中から最高尤度の航跡候補を残して、他の航跡を削除する(ステップS306)。そして、目標追尾装置100の各機能は、ステップS107〜ステップS109のコスト決定から航跡決定までの処理を実行し、ステップS110へ移行する。
【0065】
他方、ルールが「可変」の場合、多次元相関行列生成部121は、多次元相関行列において同一の観測値が複数の航跡候補に割り当てられることはないことから、目標追尾装置100の各機能は、ステップS107〜ステップS109のコスト決定から航跡決定までの処理を実行し、ステップS110へ移行する。
【0066】
従って、図7,8に示すように、目標番号が付与された2つの航跡候補群で最新フレームの観測値の取り合いが発生した際には、ルールが「固定」の場合と、ルールが「可変」とで、異なる処理がされる。そして、ステップS110では、平滑値算出部151は、最終的に残った航跡候補の当該観測フレームにおける平滑値を算出する。
【0067】
上記のような実施の形態2の目標追尾装置によれば、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成する。また、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ統合の際には、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、多次元相関行列を生成する。この構成により、各クラスタの探知抜けフレームの発生状況の違いからクラスタ統合において多次元相関行列を生成する場合や、前回からの航跡候補を全て残す場合等の多次元相関行列のフレーム数を一時的に長くする必要が生じた場合に、その状況に対応した多次元相関行列を生成することができる。
【0068】
また、多次元相関行列生成部121は、クラスタ生成統合分離部161によるクラスタ統合の際には、統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、クラスタ生成統合分離部161によるクラスタ統合とともに当該複数のクラスタのそれぞれの多次元相関行列を結合し、統合時フレーム数の多次元相関行列を生成する。この構成により、目標追尾装置100の許容負荷の制限によって長いフレーム数の多次元の相関決定を実行できない場合には、多次元相関行列の生成時に前回からの航跡候補が削除されることから、目標追尾装置100の許容負荷に対応する多次元相関行列を生成することができる。
【0069】
さらに、統合時フレーム数ルール設定部171は、多次元の相関決定を実行するための目標追尾装置100の演算負荷の許容量と、ルール設定用パラメータとを用いた演算により、ルールを「固定」及び「可変」のいずれかに設定する。そして、多次元相関行列生成部121は、統合時フレーム数ルール設定部171により設定されたルールに対応する多次元相関行列を生成する。この構成により、多次元相関行列のフレーム数を一時的に長くする必要が生じた場合や、目標追尾装置100の許容負荷の制限によって長いフレーム数の多次元の相関決定を実行できない場合の異なる状況に対応した多次元相関行列を生成することができ、目標追尾装置100の演算負荷の許容量を超えることなく、その許容量の範囲内で最も良い精度の多次元の相関決定の結果を出力することができる。
【0070】
なお、実施の形態2では、多次元相関行列生成部121が図7,8に示すような2つの方式の多次元相関行列の生成処理を実行可能となっていた。しかしながら、多次元相関行列生成部121は、いずれか一方の方式の多次元相関行列の生成処理のみを実行可能であってもよい。この場合の目標追尾装置100の構成は、統合時フレーム数ルール設定部171を省略した構成となる。
【符号の説明】
【0071】
100 目標追尾装置、110 航跡候補生成処理系(航跡候補生成処理部)、111 観測値割当部、112 コスト算出部、121 多次元相関行列生成部、131 多次元相関決定部、141 航跡決定部、150 航跡候補追尾処理系(航跡候補追尾処理部)、151 平滑値算出部、152 予測値算出部、161 クラスタ生成統合分離部(クラスタ処理部)、171 統合時フレーム数ルール設定部、200 センサ、300 表示装置。
【特許請求の範囲】
【請求項1】
センサの観測値を用いて目標物の航跡を推定する目標追尾装置であって、
前記センサの観測値を取得し、その取得した観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新し、その更新した航跡候補についての尤度に関する指標であるコストを算出する航跡候補生成部と、
前記センサの観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択し、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する多次元相関行列生成部と、
前記多次元相関行列生成部によって生成された前記多次元相関行列を用いて、多次元の相関決定を行い、当該観測フレームで航跡候補の組み合わせを抽出する多次元相関決定部と、
抽出された航跡候補の組み合わせを次の観測フレームでの既存の航跡候補として設定するとともに、抽出された航跡候補について航跡確立する航跡決定部と、
次の観測フレームでの既存の航跡候補について、航跡表示用の平滑値と、次の観測フレームで取得する観測値を当該既存の航跡候補に割り当てるための予測値とを算出する航跡候補追尾処理部と
を備え、
前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、
選択した観測フレームが、航跡候補に割り当てられる観測値が存在しない探知抜けフレームであれば、その探知抜けフレームを除外して、
航跡候補に割り当てられる観測値が存在する前記指定フレーム数の探知フレームを選択するために、前記探知抜けフレームよりも前の観測フレームを選択する
ことを特徴とする目標追尾装置。
【請求項2】
前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、最新の観測フレームからの前記探知抜けフレームを含めた観測フレームの個数が、所定の上限フレーム数に達した場合には、前記探知抜けフレームをも選択し、選択した探知フレーム及び探知抜けフレームを用いて前記多次元相関行列を生成する
ことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部
をさらに備え、
前記多次元相関行列生成部は、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【請求項4】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部
をさらに備え、
前記多次元相関行列生成部は、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、統合後の航跡候補の観測フレーム数である統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、前記クラスタ処理部によるクラスタ統合とともに当該複数のクラスタのそれぞれの前記多次元相関行列を結合し、指定フレーム数の前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【請求項5】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部と、
統合後の航跡候補の観測フレーム数である統合時フレーム数を、可変及び固定のいずれか一方に設定する統合時フレーム数ルール設定部と
をさらに備え、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、
前記統合時フレーム数ルール設定部により統合時フレーム数が可変に設定されている場合に、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、前記多次元相関行列を生成し、
前記統合時フレーム数ルール設定部により統合時フレーム数が固定に設定されている場合に、前記統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、前記クラスタ処理部によるクラスタ統合とともに当該複数のクラスタのそれぞれの前記多次元相関行列を結合し、前記所定値の前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【請求項1】
センサの観測値を用いて目標物の航跡を推定する目標追尾装置であって、
前記センサの観測値を取得し、その取得した観測値を既存の航跡候補に割り当てて、既存の航跡候補を更新し、その更新した航跡候補についての尤度に関する指標であるコストを算出する航跡候補生成部と、
前記センサの観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択し、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する多次元相関行列生成部と、
前記多次元相関行列生成部によって生成された前記多次元相関行列を用いて、多次元の相関決定を行い、当該観測フレームで航跡候補の組み合わせを抽出する多次元相関決定部と、
抽出された航跡候補の組み合わせを次の観測フレームでの既存の航跡候補として設定するとともに、抽出された航跡候補について航跡確立する航跡決定部と、
次の観測フレームでの既存の航跡候補について、航跡表示用の平滑値と、次の観測フレームで取得する観測値を当該既存の航跡候補に割り当てるための予測値とを算出する航跡候補追尾処理部と
を備え、
前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、
選択した観測フレームが、航跡候補に割り当てられる観測値が存在しない探知抜けフレームであれば、その探知抜けフレームを除外して、
航跡候補に割り当てられる観測値が存在する前記指定フレーム数の探知フレームを選択するために、前記探知抜けフレームよりも前の観測フレームを選択する
ことを特徴とする目標追尾装置。
【請求項2】
前記多次元相関行列生成部は、前記多次元相関行列を生成する際に、最新の観測フレームからの前記探知抜けフレームを含めた観測フレームの個数が、所定の上限フレーム数に達した場合には、前記探知抜けフレームをも選択し、選択した探知フレーム及び探知抜けフレームを用いて前記多次元相関行列を生成する
ことを特徴とする請求項1記載の目標追尾装置。
【請求項3】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部
をさらに備え、
前記多次元相関行列生成部は、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【請求項4】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部
をさらに備え、
前記多次元相関行列生成部は、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、統合後の航跡候補の観測フレーム数である統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、前記クラスタ処理部によるクラスタ統合とともに当該複数のクラスタのそれぞれの前記多次元相関行列を結合し、指定フレーム数の前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【請求項5】
前記航跡候補生成部による航跡候補生成結果に基づいて、複数の航跡が互いに近接するか否かを判断し、互いに近接する複数の航跡については同一のクラスタで処理し、互いに離れた航跡については異なる複数のクラスタで処理するように、クラスタの生成・統合・分離を行って、クラスタに航跡候補を振り分けるクラスタ処理部と、
統合後の航跡候補の観測フレーム数である統合時フレーム数を、可変及び固定のいずれか一方に設定する統合時フレーム数ルール設定部と
をさらに備え、
前記クラスタ処理部によるクラスタ生成・分離の際には、クラスタに振り分けられた航跡候補と、その航跡候補についてのコストとを含む多次元相関行列を生成し、
前記クラスタ処理部によるクラスタ統合の際には、
前記統合時フレーム数ルール設定部により統合時フレーム数が可変に設定されている場合に、統合される複数のクラスタのうち最も長い観測フレーム数を用いているクラスタの観測フレーム数に対応させて、前記多次元相関行列を生成し、
前記統合時フレーム数ルール設定部により統合時フレーム数が固定に設定されている場合に、前記統合時フレーム数が所定値となるように、統合される複数のクラスタのそれぞれで多次元相関行列を生成し、前記クラスタ処理部によるクラスタ統合とともに当該複数のクラスタのそれぞれの前記多次元相関行列を結合し、前記所定値の前記多次元相関行列を生成する
ことを特徴とする請求項1又は請求項2に記載の目標追尾装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−286275(P2010−286275A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−138347(P2009−138347)
【出願日】平成21年6月9日(2009.6.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月9日(2009.6.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]