
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、偏光特性の影響を受けずに安定した強度のレーザ反射光を検出することができる目標追尾誘導装置及び方法に関する。
【背景技術】
【0002】
目標追尾誘導装置は、目標に向けてレーザビームを照射すると共に、この目標に向けて飛翔体を飛翔させ、目標で反射されたレーザビームのレーザ反射光を、飛翔体に搭載した近赤外シーカにより検出して目標を捕捉し、飛翔体の飛翔経路を修正して飛翔体を目標に向けて誘導する装置である。
【0003】
かかる目標追尾誘導装置に関連する先行技術として、特許文献1、2が既に開示されている。
【0004】
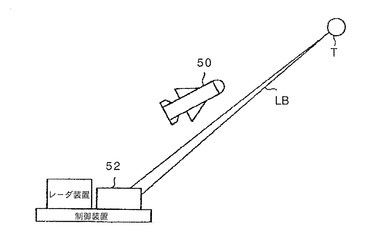
特許文献1の「目標追尾誘導システム及び目標追尾誘導方法」は、設備の簡素化を図った上で、飛翔体を確実に目標に向けて誘導させることを可能にすることを目的とする。
そのため、この発明では、図2に示すように、飛翔体50において、目標Tに向かって赤外線レーザ照射装置52から照射されているレーザビームLBの後方散乱光を赤外線センサにより検出し、システム制御部により赤外線センサによる検出結果からレーザビームLBの軌跡及び方向を求め、このレーザビームLBの軌跡及び方向と位置・速度センサにより検出される飛翔体50の飛翔位置・速度情報とを比較照合して、レーザビームLBに対する飛翔体50の飛翔位置及び飛翔方向を求め、このレーザビームLBの軌跡及び方向と飛翔位置及び飛翔方向とのずれに対応する誘導信号を生成して姿勢駆動部に与えることにより、飛翔体50をレーザビームLBに近づけ、飛翔方向とレーザビーム方向とを略一致させるものである。
【0005】
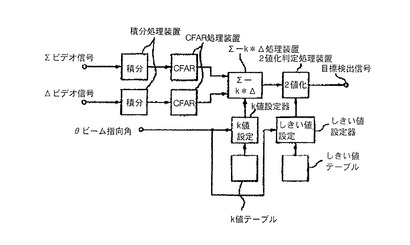
特許文献2の「シーカ角度分解能補正装置」は、目標体のシャープな映像が得られ、目標体の検知能力を向上させることを目的とする。
そのため、図3に示すように、このシーカ角度分解能補正装置は、ビーム指向角に対するビーム幅を小さくするΣ−k*Δ処理を行なうk値及びビーム指向角、遮蔽物の影響で変るエコーパルスの利得を2値化するしきい値レベルを予め取得し、蓄積しておくテーブル、蓄積したk値及びしきい値レベルで、Σ−k*Δ処理を行いビーム幅の広がりを一定にし、2値化により遮蔽物の影響を除去し、ビーム幅をブロッキング状態によらず一定にする補正手段を設けたものである。
【0006】
【特許文献1】特開2002−90093号公報、「目標追尾誘導システム及び目標追尾誘導方法」
【特許文献2】特開2001−51054号公報、「シーカ角度分解能補正装置」
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述した従来の目標追尾誘導装置において、目標に対しレーザビームを照射し、その反射光を飛翔体に搭載される赤外線シーカで検出することにより、目標の反射光を捕捉し、目標方向に向けて飛翔体を誘導させるため、高出力のレーザが必要になる。
【0008】
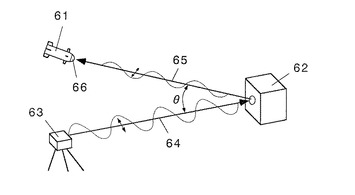
しかし、高出力レーザ照射機から照射されるレーザビームの偏光は直線偏光であるため、図4に模式的に示すように、シーカ66が目標62の垂直方向に対して、広範囲(広角)で目標を検出する場合、レーザ照射機63、目標62、飛翔体61のなす角θによっては、レーザビーム64のある偏光方向において、シーカ66が受光するレーザ反射光65の強度が大きく低下する場合がある。
そのため、その偏光方向のレーザビーム64の反射光65の強度が極端に低下し、シーカの検出精度の悪化、またはこれを補うためのレーザ照射機に出力調整装置等の付加機能が必要となり、装置の寸法・質量増につながり、運搬や設置等の運用を制限してしまう問題点があった。
【0009】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明によれば、目標に対しレーザビームを照射するレーザビーム照射装置と、
目標による前記レーザビームの反射光を検出する赤外線シーカを搭載した飛翔体とを備え、
目標に対しレーザビームを照射し、その反射光を前記赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導装置であって、
前記レーザビーム照射装置で発生するレーザビームの偏光を直線偏光から円偏光に変換する偏光変換素子を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導装置が提供される。
【0011】
本発明の好ましい実施形態によれば、前記偏光変換素子は、4分の1波長遅相子である。
【0012】
また本発明によれば、目標に対しレーザビームを照射し、
目標による前記レーザビームの反射光を飛翔体に搭載した赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導方法であって、
目標に対し照射するレーザビームの偏光を直線偏光から円偏光に変換して、円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導方法が提供される。
【発明の効果】
【0013】
上記本発明の装置及び方法によれば、目標に対し照射するレーザビームの偏光を偏光変換素子(例えば、4分の1波長遅相子:λ/4板)により直線偏光から円偏光に変換して照射するので、レーザ照射機、目標、飛翔体のなす角に関係なく、偏光成分による反射光強度の変化量は一定となり、シーカは安定した強度の反射光を検出できる。
これにより、レーザ出力調整装置等を付けることなくシステムが構成され、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用を制約することはなくなる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好ましい実施形態を図面を参照して説明する。なお各図において、共通する部分には同一の符号を付し、重複した説明は省略する。
【0015】
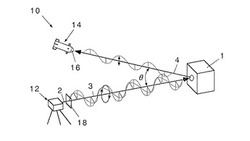
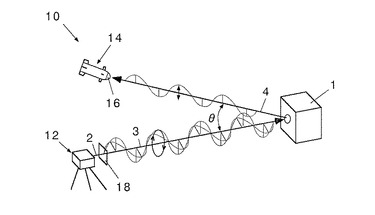
図1は、本発明による目標追尾誘導装置の実施形態図である。
この図において、本発明の目標追尾誘導装置10は、レーザビーム照射装置12と飛翔体14からなる。
【0016】
レーザビーム照射装置12は、例えばレーザデジグネータであり、目標1に対しレーザビーム3を照射する。
レーザビーム照射装置12は、図示しないレーダ装置と共に、例えば地上の固定位置、走行車両又は航空機に搭載される。レーダ装置は、レーダにより目標1を捕捉し、その結果に基づき、レーザビーム照射装置12により、目標1に対しレーザビーム3を照射するようになっている。
【0017】
飛翔体14は、目標1によるレーザビーム3の反射光4を検出する赤外線シーカ16を搭載している。
飛翔体14は、赤外線シーカ16の他に、図示しないアンテナ、位置・速度センサ、姿勢駆動装置、等を備え、飛翔体の位置・方向を演算し、飛翔体の位置・方向とレーザビーム3の軌跡及び方向とをほぼ一致させるように姿勢制御するようになっている。
【0018】
この構成により図1に示す目標追尾誘導装置10は、目標1に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標1を捕捉し、目標方向に向けて飛翔体14を誘導するようになっている。
【0019】
本発明の目標追尾誘導装置10は、さらにレーザビーム照射装置12の出射口に偏光変換素子18を備える。
偏光変換素子18は、好ましくは、4分の1波長遅相子18(4分の1波長板すなわちλ/4板)であり、直線偏光を円偏光に変換する機能を有する。
【0020】
高出力レーザ照射機であるレーザビーム照射装置12から照射されるレーザビーム2の偏光は直線偏光である。このレーザビーム2の偏光は4分の1波長遅相子18(λ/4板)により、直線偏光から円偏光に変換される。
従って、レーザビーム照射装置12から照射されるレーザビーム2の偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標1に対し照射することができる。
【0021】
上述した装置を用い、本発明の目標追尾誘導方法では、目標1に対しレーザビーム3を照射し、
目標1によるレーザビーム3の反射光4を飛翔体14に搭載した赤外線シーカ16で検出することにより、目標1を捕捉し、目標方向に向けて飛翔体14を誘導する。
また、目標1に対し照射するレーザビーム2の偏光を直線偏光から円偏光に変換して、円偏光のレーザビーム3を目標に対し照射する。
【0022】
上述した本発明の装置及び方法によれば、目標1に対し照射するレーザビーム3の偏光を偏光変換素子18(λ/4板)により直線偏光から円偏光に変換して照射するので、レーザ照射機(レーザビーム照射装置12)、目標1、飛翔体14のなす角θに関係なく、偏光成分による反射光強度の変化量は一定となり、シーカは安定した強度の反射光を検出できる。
これにより、レーザ出力調整装置等を付けることなくシステムが構成され、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用を制約することはなくなる。
【0023】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更できることは勿論である。
【図面の簡単な説明】
【0024】
【図1】本発明による目標追尾誘導装置の実施形態図である。
【図2】特許文献1の目標追尾誘導装置の模式図である。
【図3】特許文献2の「シーカ角度分解能補正装置」の模式図である。
【図4】従来の目標追尾誘導装置の模式図である。
【符号の説明】
【0025】
1 目標、2 レーザビーム(直線偏光)、
3 レーザビーム(円偏光)、4 反射光、
10 目標追尾誘導装置、12 レーザビーム照射装置、
14 飛翔体、16 赤外線シーカ、
18 偏光変換素子(4分の1波長遅相子、λ/4板)
【技術分野】
【0001】
本発明は、偏光特性の影響を受けずに安定した強度のレーザ反射光を検出することができる目標追尾誘導装置及び方法に関する。
【背景技術】
【0002】
目標追尾誘導装置は、目標に向けてレーザビームを照射すると共に、この目標に向けて飛翔体を飛翔させ、目標で反射されたレーザビームのレーザ反射光を、飛翔体に搭載した近赤外シーカにより検出して目標を捕捉し、飛翔体の飛翔経路を修正して飛翔体を目標に向けて誘導する装置である。
【0003】
かかる目標追尾誘導装置に関連する先行技術として、特許文献1、2が既に開示されている。
【0004】
特許文献1の「目標追尾誘導システム及び目標追尾誘導方法」は、設備の簡素化を図った上で、飛翔体を確実に目標に向けて誘導させることを可能にすることを目的とする。
そのため、この発明では、図2に示すように、飛翔体50において、目標Tに向かって赤外線レーザ照射装置52から照射されているレーザビームLBの後方散乱光を赤外線センサにより検出し、システム制御部により赤外線センサによる検出結果からレーザビームLBの軌跡及び方向を求め、このレーザビームLBの軌跡及び方向と位置・速度センサにより検出される飛翔体50の飛翔位置・速度情報とを比較照合して、レーザビームLBに対する飛翔体50の飛翔位置及び飛翔方向を求め、このレーザビームLBの軌跡及び方向と飛翔位置及び飛翔方向とのずれに対応する誘導信号を生成して姿勢駆動部に与えることにより、飛翔体50をレーザビームLBに近づけ、飛翔方向とレーザビーム方向とを略一致させるものである。
【0005】
特許文献2の「シーカ角度分解能補正装置」は、目標体のシャープな映像が得られ、目標体の検知能力を向上させることを目的とする。
そのため、図3に示すように、このシーカ角度分解能補正装置は、ビーム指向角に対するビーム幅を小さくするΣ−k*Δ処理を行なうk値及びビーム指向角、遮蔽物の影響で変るエコーパルスの利得を2値化するしきい値レベルを予め取得し、蓄積しておくテーブル、蓄積したk値及びしきい値レベルで、Σ−k*Δ処理を行いビーム幅の広がりを一定にし、2値化により遮蔽物の影響を除去し、ビーム幅をブロッキング状態によらず一定にする補正手段を設けたものである。
【0006】
【特許文献1】特開2002−90093号公報、「目標追尾誘導システム及び目標追尾誘導方法」
【特許文献2】特開2001−51054号公報、「シーカ角度分解能補正装置」
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述した従来の目標追尾誘導装置において、目標に対しレーザビームを照射し、その反射光を飛翔体に搭載される赤外線シーカで検出することにより、目標の反射光を捕捉し、目標方向に向けて飛翔体を誘導させるため、高出力のレーザが必要になる。
【0008】
しかし、高出力レーザ照射機から照射されるレーザビームの偏光は直線偏光であるため、図4に模式的に示すように、シーカ66が目標62の垂直方向に対して、広範囲(広角)で目標を検出する場合、レーザ照射機63、目標62、飛翔体61のなす角θによっては、レーザビーム64のある偏光方向において、シーカ66が受光するレーザ反射光65の強度が大きく低下する場合がある。
そのため、その偏光方向のレーザビーム64の反射光65の強度が極端に低下し、シーカの検出精度の悪化、またはこれを補うためのレーザ照射機に出力調整装置等の付加機能が必要となり、装置の寸法・質量増につながり、運搬や設置等の運用を制限してしまう問題点があった。
【0009】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明によれば、目標に対しレーザビームを照射するレーザビーム照射装置と、
目標による前記レーザビームの反射光を検出する赤外線シーカを搭載した飛翔体とを備え、
目標に対しレーザビームを照射し、その反射光を前記赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導装置であって、
前記レーザビーム照射装置で発生するレーザビームの偏光を直線偏光から円偏光に変換する偏光変換素子を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導装置が提供される。
【0011】
本発明の好ましい実施形態によれば、前記偏光変換素子は、4分の1波長遅相子である。
【0012】
また本発明によれば、目標に対しレーザビームを照射し、
目標による前記レーザビームの反射光を飛翔体に搭載した赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導方法であって、
目標に対し照射するレーザビームの偏光を直線偏光から円偏光に変換して、円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導方法が提供される。
【発明の効果】
【0013】
上記本発明の装置及び方法によれば、目標に対し照射するレーザビームの偏光を偏光変換素子(例えば、4分の1波長遅相子:λ/4板)により直線偏光から円偏光に変換して照射するので、レーザ照射機、目標、飛翔体のなす角に関係なく、偏光成分による反射光強度の変化量は一定となり、シーカは安定した強度の反射光を検出できる。
これにより、レーザ出力調整装置等を付けることなくシステムが構成され、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用を制約することはなくなる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好ましい実施形態を図面を参照して説明する。なお各図において、共通する部分には同一の符号を付し、重複した説明は省略する。
【0015】
図1は、本発明による目標追尾誘導装置の実施形態図である。
この図において、本発明の目標追尾誘導装置10は、レーザビーム照射装置12と飛翔体14からなる。
【0016】
レーザビーム照射装置12は、例えばレーザデジグネータであり、目標1に対しレーザビーム3を照射する。
レーザビーム照射装置12は、図示しないレーダ装置と共に、例えば地上の固定位置、走行車両又は航空機に搭載される。レーダ装置は、レーダにより目標1を捕捉し、その結果に基づき、レーザビーム照射装置12により、目標1に対しレーザビーム3を照射するようになっている。
【0017】
飛翔体14は、目標1によるレーザビーム3の反射光4を検出する赤外線シーカ16を搭載している。
飛翔体14は、赤外線シーカ16の他に、図示しないアンテナ、位置・速度センサ、姿勢駆動装置、等を備え、飛翔体の位置・方向を演算し、飛翔体の位置・方向とレーザビーム3の軌跡及び方向とをほぼ一致させるように姿勢制御するようになっている。
【0018】
この構成により図1に示す目標追尾誘導装置10は、目標1に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標1を捕捉し、目標方向に向けて飛翔体14を誘導するようになっている。
【0019】
本発明の目標追尾誘導装置10は、さらにレーザビーム照射装置12の出射口に偏光変換素子18を備える。
偏光変換素子18は、好ましくは、4分の1波長遅相子18(4分の1波長板すなわちλ/4板)であり、直線偏光を円偏光に変換する機能を有する。
【0020】
高出力レーザ照射機であるレーザビーム照射装置12から照射されるレーザビーム2の偏光は直線偏光である。このレーザビーム2の偏光は4分の1波長遅相子18(λ/4板)により、直線偏光から円偏光に変換される。
従って、レーザビーム照射装置12から照射されるレーザビーム2の偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標1に対し照射することができる。
【0021】
上述した装置を用い、本発明の目標追尾誘導方法では、目標1に対しレーザビーム3を照射し、
目標1によるレーザビーム3の反射光4を飛翔体14に搭載した赤外線シーカ16で検出することにより、目標1を捕捉し、目標方向に向けて飛翔体14を誘導する。
また、目標1に対し照射するレーザビーム2の偏光を直線偏光から円偏光に変換して、円偏光のレーザビーム3を目標に対し照射する。
【0022】
上述した本発明の装置及び方法によれば、目標1に対し照射するレーザビーム3の偏光を偏光変換素子18(λ/4板)により直線偏光から円偏光に変換して照射するので、レーザ照射機(レーザビーム照射装置12)、目標1、飛翔体14のなす角θに関係なく、偏光成分による反射光強度の変化量は一定となり、シーカは安定した強度の反射光を検出できる。
これにより、レーザ出力調整装置等を付けることなくシステムが構成され、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用を制約することはなくなる。
【0023】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更できることは勿論である。
【図面の簡単な説明】
【0024】
【図1】本発明による目標追尾誘導装置の実施形態図である。
【図2】特許文献1の目標追尾誘導装置の模式図である。
【図3】特許文献2の「シーカ角度分解能補正装置」の模式図である。
【図4】従来の目標追尾誘導装置の模式図である。
【符号の説明】
【0025】
1 目標、2 レーザビーム(直線偏光)、
3 レーザビーム(円偏光)、4 反射光、
10 目標追尾誘導装置、12 レーザビーム照射装置、
14 飛翔体、16 赤外線シーカ、
18 偏光変換素子(4分の1波長遅相子、λ/4板)
【特許請求の範囲】
【請求項1】
目標に対しレーザビームを照射するレーザビーム照射装置と、
目標による前記レーザビームの反射光を検出する赤外線シーカを搭載した飛翔体とを備え、
目標に対しレーザビームを照射し、その反射光を前記赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導装置であって、
前記レーザビーム照射装置で発生するレーザビームの偏光を直線偏光から円偏光に変換する偏光変換素子を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導装置。
【請求項2】
前記偏光変換素子は、4分の1波長遅相子である、ことを特徴とする請求項1に記載の目標追尾誘導装置。
【請求項3】
目標に対しレーザビームを照射し、
目標による前記レーザビームの反射光を飛翔体に搭載した赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導方法であって、
目標に対し照射するレーザビームの偏光を直線偏光から円偏光に変換して、円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導方法。
【請求項1】
目標に対しレーザビームを照射するレーザビーム照射装置と、
目標による前記レーザビームの反射光を検出する赤外線シーカを搭載した飛翔体とを備え、
目標に対しレーザビームを照射し、その反射光を前記赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導装置であって、
前記レーザビーム照射装置で発生するレーザビームの偏光を直線偏光から円偏光に変換する偏光変換素子を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導装置。
【請求項2】
前記偏光変換素子は、4分の1波長遅相子である、ことを特徴とする請求項1に記載の目標追尾誘導装置。
【請求項3】
目標に対しレーザビームを照射し、
目標による前記レーザビームの反射光を飛翔体に搭載した赤外線シーカで検出して目標を捕捉し、飛翔体を目標方向に向けて誘導する目標追尾誘導方法であって、
目標に対し照射するレーザビームの偏光を直線偏光から円偏光に変換して、円偏光のレーザビームを目標に対し照射する、ことを特徴とする目標追尾誘導方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−144973(P2009−144973A)
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願番号】特願2007−322143(P2007−322143)
【出願日】平成19年12月13日(2007.12.13)
【出願人】(500302552)株式会社IHIエアロスペース (298)
【Fターム(参考)】
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願日】平成19年12月13日(2007.12.13)
【出願人】(500302552)株式会社IHIエアロスペース (298)
【Fターム(参考)】
[ Back to top ]