
目標追跡に関する改善策
目標を追跡する方法が、目標の観察を行うように動作可能な複数の検知ノードを備える非集中型ネットワークに適用される。該方法は、各ノードが複数のモデル追跡アルゴリズムを実行し、それによって各ノードに記憶されている追跡情報を更新するステップと、各ノードが更新された追跡情報をネットワーク内の選択された他のノードに通信するステップと、各ノードが別のノードから追跡情報を受け取ることに応えて、該受け取る追跡情報を局所追跡情報と保守的に融合するステップとを備える。一実施形態では、複数のモデル追跡アルゴリズムは、相互作用複数モデル追跡アルゴリズムである。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は目標を追跡するための方法に関する。さらに詳細には、本発明は複数のノードを備える非集中型ネットワークに適用されるこのような方法に関する。ネットワーク内の各ノードは、選択された他のノードと通信し、目標の観察を行うように動作可能である。また、本発明はこのような方法を実施するための手段にも関する。
【背景技術】
【0002】
アーテックハウス(Artech House)(1999年)により出版されたSamuel Blackman及びRobert Popoliによる書籍「現代の追跡システムの設計及び分析(Design and Analysis of Modern Tracking Systems)」に、多くの公知の目標追跡の方法が説明されている。追跡方法のある特定のクラスは、複数のモデルアルゴリズムを使用する。これらの高度な追跡アルゴリズムは、目標のダイナミクスが多くの力学的状態の間で変化することがある場合に適切である。例えば、該目標は直線で飛行したり高G作戦(high-G manoeuvres)を実行したりできる航空機であってもよい。複数のモデル技法は、航空機がこれらの2つの力学的状態の間で遷移するときに、該航空機に正確に追跡できるようにし、任意の数の力学的状態を許容できるように拡張できる。それぞれが目標を追跡するために異なる力学モデルを適用する多くの追跡アルゴリズムは、本質的には並行に実行され、複数のモデルアルゴリズムの出力は各追跡アルゴリズムの予測の組み合わせである。複数モデル追跡アルゴリズムの、ある公知の例はBlackman及びPopoliによって記述された相互作用複数モデル(IMM)アルゴリズムである。該IMMアルゴリズムは、特に効率的な複数モデル追跡アルゴリズムである。
【発明の開示】
【0003】
多くの場合、目標をより広い領域をわたって追跡できるように、あるいは異なるタイプの多くのセンサを使用できるように、多くのセンサを使用して目標を追跡することが望ましい。このような状況において最適な追跡を達成するためには、すべてのセンサからのデータが融合されることが必要である。このような融合に適切な多くのネットワークアーキテクチャが公知である。これらのアーキテクチャは、集中型、分散型、または非集中型として分類できる。
【0004】
大部分の追跡方法は、集中型アーキテクチャまたは分散型アーキテクチャを使用して実現されている。集中型アーキテクチャとは、融合されているデータが融合のために中央処理機器に送信されるアーキテクチャである。該中央機器は目標追跡を出力するためにすべてのデータを処理する。分散型アーキテクチャは、該中央の融合処理が遠隔装置にいくらかの計算上の負荷をかけることがあるという点で異なっている。しかしながら、分散された処理の結果が結合されるためには、やはりシステムの中に中央処理機器が存在しなければならない。したがって、集中型アーキテクチャ及び分散型アーキテクチャの両方とも、中央処理機器がないことがシステム全体の破壊的な障害につながるのは必至であるため、中央処理機器の損失に弱い。さらに、第1に、ネットワークのサイズが拡大するにつれて、中央処理機器に課される計算上の負荷が急激に増大するため、及び第2に、中央処理機器との間で通信しなければならないデータ量が該ネットワークのサイズとともに急激に増加するために、集中型アーキテクチャも、分散型アーキテクチャもスケラブル(scaleable)ではない。したがって、該ネットワークのサイズは、通信に使用可能な帯域幅及び該中心処理機器の計算能力によって制限される。
【0005】
非集中型アーキテクチャは、例えば、情報融合に関する第4回国際会議(4th International Conference on Information Fusion)、カナダ(Canada)2001年の会報に発表されたHugh Durrant−Whyte及びMike Sternsによる論文「非集中型検知ネットワークにおけるデータ融合(Data Fusion in Decentralized Sensing Networks)」から知られている。非集中型ネットワークには中央処理機器はない。各ノードは、局所的なセンサによる観測、及びネットワーク内の選択された他のノードによって該ノードに通信される情報に基づいて、大局的な推定値を形成できる。通常、これらの他のノードは隣接する、あるいは最も近い近傍のノードである。集中型アーキテクチャ及び分散型アーキテクチャと対照的に、検知、処理、または通信の構成要素は非集中型アーキテクチャを有するネットワークの動作にとっては重大ではない。したがって、任意の単一の要素の故障は、分散型アーキテクチャまたは集中型アーキテクチャを有するネットワークで起こるであろうような破壊的なシステム故障ではなく、性能の増分的な減少を生じさせるにすぎない。さらに、ノードは大局的なネットワークトポロジの知識を必要としないため、システムは単に新しい検知ノードをシステムに接続するだけで拡大できる。分散型システム及び集中型システムとは対照的に、計算要件及び帯域幅要件は、ネットワークのサイズの拡大に伴って増加しない。通信は、1つまたは複数のノードがネットワーク全体でブロードキャストすることを必要とするのではなく、ノード対ノード単位で管理される。
【0006】
非集中型ネットワークは、中央処理機器がないこと、ネットワーク内のいかなるノードもネットワークトポロジ全体の知識を有する必要がない(ノードは選択された他のノードについてのみ知っている必要がある)こと、及び共通の通信機器が必要ないことによって特徴付けられている。これらの特徴は、非集中型アーキテクチャが集中型システムまたは分散型システムよりさらに頑健で、さらにスケラブルで、さらにモジュール式(modular)であることを保証する。
【0007】
残念なことに、非集中型追跡システムは今日まで単純な追跡アルゴリズムを実現できるにすぎなかった。したがって、このようなシステムは複雑な演習を行う目標を効率的に追跡することはできない。IMMアルゴリズムを実現する分散型ネットワークアーキテクチャは、例えば、推定、追跡及び融合に関するワークショップ:Yaakob Bar−Shalomに対する賛辞(Workshop on Estimation, Tracking and Fusion: A Tribute to Yaakob Bar-Shalom)、カリフォルニア州モンテレー(Monterey CA)、2001年の会報の中で発表されたT.Ito及びM.Faroqによる論文「複数センサ追跡融合のための集中型及び非集中型IMMアルゴリズム(Centralized and Decentralised IMM Algorithms for Multisensor Track Fusion)」から知られているが、該IMMアルゴリズムは、実際には、本願の意味で非集中型のIMMアルゴリズムではなく、遠隔検知ノードから推定値を融合するために集中型処理を保持する分散型IMMアルゴリズムを開示する。各ノードは、局所的に生成されたデータ対してだけIMM手順を実行し、中央融合装置が、これらの結果として生じる推定値を結合する。このような処理は本発明の意味では非集中型ではないため、依然として前述された問題及び不利な点を示す。
【0008】
前述された背景に対して、本発明は前記に特定された問題のいくつかを克服する、あるいは少なくとも部分的に軽減することを目的とする。現在知られている追跡システムより、演習中の目標を効果的に追跡でき、スケラブルで、頑健で、モジュール式である非集中型追跡システムを提供することが本発明のさらなる目的である。
【0009】
大きく見ると、本発明は、複数モデル追跡技法を使用して目標を追跡するように動作可能なセンサの非集中型ネットワークを提供すること、及び非集中型ネットワーク内で複数モデル追跡アルゴリズムを実現することにまつわる問題を克服することに関する。
【0010】
本発明の第1の態様によると、各ノードが、目標観察を行うように動作可能なセンサと、追跡情報を送信、受信するように動作可能な通信手段と、追跡情報を記憶するように動作可能な記憶手段とを備える、複数のノードを備える非集中型ネットワークに適用される目標を追跡する方法が提供される。前記方法は、ローカルノードにおいて、
(i)目標ダイナミクスモデルの集合を提供するステップと、
(ii)初期モデル確率の集合を提供するステップであって、各初期モデル確率は目標ダイナミクスモデルの前記集合の1つと関連付けられ、各初期モデル確率は該初期モデル確率と関連付けられた目標ダイナミクスモデルが目標ダイナミクスと一致する確率に関連するものと、
(iii)初期モデル目標状態推定値の集合を提供するステップであって、各初期モデル目標状態推定値が目標ダイナミクスモデルの前記集合の1つと関連付けられているようなものと、
(iv)各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられた初期モデル目標状態推定値に適用することによって、予測されるモデル目標状態推定値の集合を計算するステップと、
(v)前記ローカルノードで行われている目標観察に応えて、第1の追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vi)遠隔ノードから該ローカルノードで受け取られる追跡情報に応えて、第2の目標追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vii)前記ネットワーク内の選択された他のノードに、更新された追跡情報を通信するステップと、を実行することを備え、
前記第1の追跡手順は、
(a)前記目標観察と前記予測されたモデル目標状態推定値との間の差異に依存して、更新されたモデル確率を計算するステップと、
(b)前記予測されたモデル目標状態推定値及び前記目標観察に依存して更新されたモデル目標状態推定値を計算するステップと、
(c)前記更新されたモデル確率に関連する重み付けを使用して前記予測されたモデル目標状態推定値を結合することによって複合予測目標状態推定値を計算するステップと、
を備え、
前記第2の追跡手段は、
(a)融合された追跡情報を生成するために、前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップを備える。
【0011】
前記追跡情報は、前記更新された複合目標状態推定値、前記更新されたモデル目標状態推定値、及び前記更新されたモデル確率の1つまたは複数を備える。該方法は、前記ネットワークの各ノードで上記のステップ(i)から(vii)を繰り返すステップと、次に、前記初期モデル確率及び前記初期モデル目標状態推定値の代りに、直前の反復からの前記更新されたモデル確率、及び前記更新されたモデル目標状態推定値を使用することによって前記ネットワーク内の各ノードで上記のステップ(iv)から(vii)を反復するステップをさらに備えてもよい。
【0012】
本発明による方法は、該追跡方法のアルゴリズム構造がネットワーク内の各ノードで同じであるために非集中型ネットワークにおいて実現できる。したがって非集中型ネットワークと関連付けられる優位点は、本発明にも備わるものである。すなわち、本発明による方法はスケラブルで、頑健で、モジュール式である。本発明による方法を具現化するネットワーク内の通信に必要とされる帯域幅はネットワークサイズの拡大とともに拡大しないため、このようなネットワークには任意の数のノードを組み込むことができる。このようなネットワーク内で任意の1つのノードが失われると、どのノードが失われたのかに関係なく、ネットワーク全体の性能の増分的な損失が生じるにすぎない。しかしながら、複数モデル追跡アルゴリズムを実現することによって、本発明による方法は以前に公知であった非集中型追跡方法よりはるかに優れた追跡性能を示す。詳しく後述される、本発明のある特定の実施形態では、(添付図面の図3に示されているように)毎秒10から1000追跡の範囲の帯域幅について130mと360mの間の追跡位置誤差が改善される。したがって、本発明は低通信帯域幅での使用に特に適していることが分かる。
【0013】
本発明は、有利なことに、ノードのネットワークが、少量のデータだけ(例えば、ノードの複合目標状態推定値だけ)を通信する一方、非集中型ネットワークアーキテクチャを使用して動作できるようにする。該アルゴリズムはネットワークのトポロジに制限を課さず、任意のネットワークにおいて完全に自己整合している。さらに、遠隔ノードからの追跡情報を該ローカルノードで記憶されている追跡情報と融合すると、局所推定値の質が改善される。少量のデータしかネットワークを通して通信されないのにも関わらず、この推定値の質の改善が達成される。したがって、本発明が、非常に低いネットワーク帯域幅だけを使用する利点を維持しつつ、一方目標状態推定値の質を向上することは容易に明らかである。
【0014】
該方法は、第1の初期モデル目標状態推定値に、他の初期モデル目標状態推定値のそれぞれの割合を結合することにより、初期モデル目標状態推定値を混合するステップであって、該割合は、直前の反復中に、前記目標ダイナミクスが該他の初期モデル目標状態推定値に関連付けられた目標ダイナミクスモデルと一致する状態から、該第1の初期モデル目標状態推定値と関連付けられた目標ダイナミクスモデルと一致する状態に遷移する確率に関連するものと、初期モデル目標状態推定値ごとに前記結合手順を繰り返すステップとをさらに備えてもよい。
【0015】
前記第1の追跡手順は、前記目標観察を前記ローカルノードに記憶されている前記追跡情報と関連付けるステップをさらに備えてもよい。前記第2の追跡手順は、前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と関連付けるステップをさらに備えてもよい。前記目標観察を、または場合によっては前記受け取られた追跡情報を、ローカルノードに記憶されている追跡情報に関連付けるステップは、追跡手順が雑音信号及び反射波信号の存在下で頑健に機能することを可能にする。さらに、このデータ関連付けステップは、ネットワークが複数の目標を同時に追跡できるようにする。
【0016】
前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップは、共分散交差(covariance intersection)アルゴリズムを適用することを備えてもよい。該共分散交差アルゴリズムはデータを融合するための保守的なアルゴリズムの、1つの好都合な例である。
【0017】
前記第2の追跡手順は、ベイジアン(Baysian)ネットワークの適用により初期モデル確率を更新するステップを備えてもよい。ベイジアンネットワークは、モデル確率を更新するときに、例えば、ジャミング(jamming)信号が検出されたかどうか等の多岐に渡るコンテキストデータを考慮に入れることができる。
【0018】
本発明の例示的な一実施形態によれば、前記追跡情報は前記更新された複合目標状態推定値を備えてもよい。したがって、各ノードは該複合目標状態推定値だけを送受信し、必要とされる帯域幅は低い。次に、前記複数のノードは、少なくとも第1のノードと第2のノードを備えてもよく、前記第1のノードにおいて提供される目標ダイナミクスモデルの前記集合は、前記第2のノードにおいて提供される目標ダイナミクスモデルの前記集合と異なってもよい。有利なことに、各ノードが同じ目標ダイナミクスモデルを動作することが要求されないため、該ネットワークはさらなるノードの追加により良く適応できる。
【0019】
代わりに、本発明の別の例示的な実施形態によれば、前記追跡情報は前記更新されたモデル目標状態推定値及び前記更新されたモデル確率を備えてもよい。次に前記ネットワーク内の各ノードに、同じ集合の目標ダイナミクスモデルが提供されてもよいよい。さらに多くの追跡情報を通信することによって、複合目標状態推定値だけがネットワークノード間で通信されるときに必要とされるより大きな帯域幅を必要とすることを犠牲にするが、各ノードは、さらに優れた目標状態推定値を達成できる。前記第2の追跡手順は、次に、受け取られた、更新されたモデル目標状態推定値のそれぞれを、該更新されたモデル目標状態推定値に対応する局所モデル目標状態推定値と保守的に融合することと、受け取られた、更新されたモデル確率それぞれを該更新されたモデル確率のそれぞれに対応する局所的な確率と保守的に(conservatively)融合することとを備えてもよい。
【0020】
本発明の第2の態様によると、目標を追跡する方法が提供され、前記方法は複数のノードを備える非集中型ネットワークに適用される、前記方法は、
(i)第1のノードが複数モデル追跡アルゴリズムを実行し、それによって該第1のノードに記憶されている追跡情報を更新するステップと、
(ii)前記第1のノードは、前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
(iii)前記第1のノードは、別のノードから追跡情報を受け取ることに応えて、前記受け取る追跡情報を局所的な追跡情報と保守的に(conservatively)融合するステップと、
(iv)前記ネットワーク内の各ノードでステップ(i)から(iii)を繰り返すステップと、
を備える。
【0021】
好ましくは、前記複数のモデルアルゴリズムは、相互作用(interacting)複数モデルアルゴリズムである。前記相互作用複数モデルアルゴリズムは、特に有効な複数モデルアルゴリズムである。
【0022】
本発明は、前述されたような方法を実行するように適応されるノードの非集中型ネットワークに及ぶ。本発明はさらに、実行されるときに、前述されたような方法を実施するように動作可能なコンピュータプログラムにも及ぶ。
【0023】
本発明の前記の、及び追加の特徴は特に添付請求項に述べられ、添付図面に関して詳しく後述される。
【発明を実施するための最良の形態】
【0024】
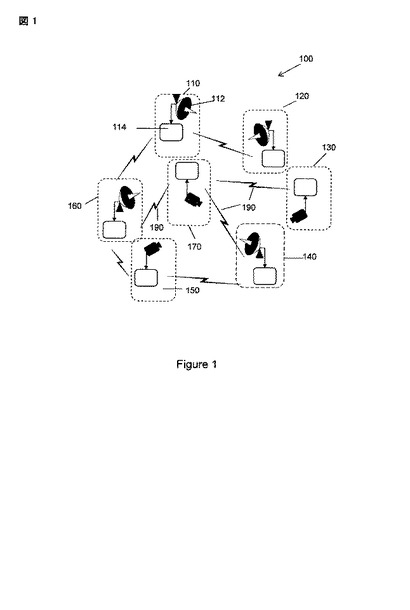
後述されるすべての実施形態に共通した非集中型ネットワークが図1に描かれている。ネットワーク100はノード110、120、130、140、150、160、及び170を備える。該ノードのそれぞれは処理通信手段と、センサとを備える。例えば、ノード110はセンサ112と、処理通信手段114とを備える。センサ112は、例えばレーダセンサであってもよい。明確にするため、残りのノードの構成要素には名前を付けられていないが、ノード120、130、140、150、160及び170がノード110と同じタイプの、あるいは異なるタイプのセンサを備えてもよいことが理解されるであろう。ネットワークが目標を追跡するために使用されるとき、各ノードは該目標の状態の詳細を備える追跡情報を出力する。この情報は目標の位置、速度、目標タイプ等の他の属性の詳細またはこのような詳細の混合を含んでもよい。これらの機能を実行するための手段を備える個々のノードは、図1において破線で囲まれている。
【0025】
該ネットワークは非集中型ネットワークである。各ノードは選択された他のノードだけと通信する。例えば、ノード170は矢印190によって概略で示されるように、ノード130、140及び160と通信している。図1の概略説明図からは直ちには分からないが、実際には、各ノードは該各ノードに最も近い近傍のノードと通信している。さらに各ノードは、目標状態推定値を生成するために、局所的に生成された追跡情報と、他のノードから該各ノードに通信される追跡情報の両方を処理するよう動作できる。したがって、例えばノード140で生成される目標状態推定値は、例えば、ノード160で生成される追跡情報を含むネットワーク100全体で生成される追跡情報に基づくことが理解されるであろう。これは、ノード140はノード160と直接的に通信していないが、該ノード140は、ノード150とは直接的に通信し、該ノード150が次にノード160と直接的に通信しているためである。したがって、ノード160で生成される追跡情報は、該追跡情報がノード150の目標状態推定値に及ぼす影響を通してノード140における目標状態推定値に影響を及ぼす。こうして、ネットワーク100内の各ノードは大局的な追跡情報に基づいて目標状態推定値を生成する。
【0026】
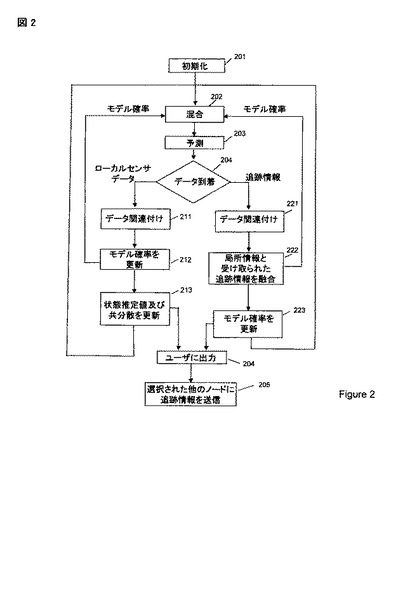
図2は、本発明の第1の実施形態による方法を使用して目標状態推定値を生成する上で各ノードによって実行されるステップを描くフローチャートである。本質的には、各ノードは、該各ノードが使用できる追跡情報に基づいて相互作用複数モデル(interacting multiple models)(IMM)アルゴリズムを実現するが、このとき、局所的に生成され、公知のIMM実現例で行われるのと実質的に同様に処理されるセンサデータと、ネットワーク内の他のノードから受け取られ、保守的な融合技法を使用することにより局所的に記憶されている追跡情報に組み込まれるデータとを用いる。IMMアルゴリズムは複数モデルアルゴリズムの一例である。IMMアルゴリズムは、多様な力学的な状態の間で遷移する目標を表すために、マルコフモデルを使用して、複数モデルからの推定値と共分散を結合する。
【0027】
本発明の第1の実施形態によると、ノード110、120、130、140、150、160及び170は、同じまたは異なる目標ダイナミクスモデルを使用してIMMアルゴリズムを実現してよい。最初に、各ノードは、該各ノードの局所的なIMMの実現において使用される各目標ダイナミクスモデルに初期モデル目標状態推定値と、初期モデル確率とが与えられるように初期化される。各初期モデル目標状態推定値は、初期共分散と関連付けられており、該初期共分散は、該初期共分散に関連付けられた初期モデル目標状態推定値の不確実性を定量化するものである。いったんこのようにして初期化されると、ノードは、直前の反復からのモデル確率及びモデル目標状態推定値を、反復ごとの初期モデル目標状態推定値及び初期モデル確率として使用して、描かれているステップを反復して実行するよう動作可能である。したがって、明確にするために、ラベル「初期」は以後の説明で削除される。本アルゴリズムは誤差に敏感ではないため、初期モデル目標状態推定値は、比較的自由に選ばれてよいことに留意すべきである。
【0028】
図2に示されているフローチャートに描かれている構造は、一般論として以下のように説明できる。ステップ201と202は混合ステップ及び予測ステップである。これらのステップは多様なモデル推定値を混合し、そして、混合モデル推定値を使用して現在の目標状態を予測する。混合ステップは、個々のモデル目標状態推定値が互いから逸れないことを確実にする。ステップ203に達するデータに応えて、ノードは、データが局所的に生成される場合には標準的な相互作用複数モデルアルゴリズムを実行する(ステップ211から213)か、あるいは、該データが別のノードから受け取られる場合には、ステップ211から223を通して該データを局所データと融合するかのどちらかである。この処理は、関連付けられた更新済みの共分散を伴う更新されたモデル目標状態推定値の集合、及び更新されたモデル確率の集合を生じさせる。ステップ211から213からなる経路を通して生成されたか、あるいは、211から223からなる経路を通して生成された、これらの更新された量は、IMMアルゴリズムの次の反復で使用される。多様なモデル目標状態推定値の組み合わせであるか、あるいは、単に関連づけられるモデル確率が最高であるモデル目標状態推定値かを備える出力がステップ204でユーザに通信され、そして、ステップ205で更新された追跡情報がネットワーク内の選択された他のノードに送信される。
【0029】
時間−ステップkで、図2に示されているフローチャートによって概略で描かれているアルゴリズムの反復が、ここで詳しく説明される。該アルゴリズムが実行されているノードは、以下の説明では、ローカルノードと呼ばれ、ネットワーク内の他のノードは遠隔ノードと呼ばれる。ネットワーク100の非集中型アーキテクチャにより、ローカルノードはネットワーク100内に備えられているノード110、120、130、140、150、160または170のいずれでもあり得ること、及び後述される同じステップが各ノードで実行されることが当業者によって理解されるだろう。
【0030】
ステップ201は、時間−ステップ(k−1)についてモデル目標状態推定値及び該モデル目標状態推定値に関連付けられた共分散と、モデル確率とが計算された直後に開始する。ステップ201は、時間(k−1)での各目標ダイナミクスモデルからのモデル目標状態推定値がともに混合され、こうして目標ダイナミクスが時間ステップ(k−1)と時間ステップkの間の時間間隔において目標ダイナミクスモデル間を遷移する可能性を表し、多様なモデル目標状態推定値が大きすぎる範囲まで逸れないことを確実にする。本実施形態では、ローカルノードで実現される相互作用複数モデルアルゴリズムは目標ダイナミクスモデル1...i,j,...rを備え、以下の量が定められる。
【0031】
xi(k−1|k−1)は、時間k−1までのすべての測定値に基づいた、時間k−1における目標ダイナミクスモデルiのモデル目標状態推定値である。
【0032】
Pi(k−1|k−1)は、xi(k−1|k−1)と関連付けられる共分散である。
【0033】
ui(k−1)は、目標ダイナミクスが時間k−1における目標ダイナミクスモデルiと一致する確率である。
【0034】
uij(k−1)は、目標が、該目標のダイナミクスがモデルjと一致する状態にあり、かつ、該目標が、該目標のダイナミクスが時間ステップk−1において目標ダイナミクスモデルiと一致していた状態から、モデルjと一致する状態に遷移したことを前提とした、条件付き確率である。
【0035】
Pijは、目標が、当初、該目標のダイナミクスが目標ダイナミクスモデルiと一致する状態にあり、かつ、該目標が、該目標のダイナミクスが目標ダイナミクスモデルjと一致する状態に遷移することを前提とした、条件付き確率である。
【0036】
上記の定義を前提とすると、以下が分かる。
【数1】
【0037】
ここで、Cj(k−1)は、混合ステップ201が完了した後に、目標ダイナミクスが目標ダイナミクスモデルjと一致する確率であり、以下によって計算されるものである。
【数2】
【0038】
したがって、混合モデル目標状態推定値及び該目標状態推定値に関連付けられる共分散は、モデルjごとに以下を使用して計算される。
【数3】
【0039】
ここで、項DPij(k−1)は、目標ダイナミクスモデルiとjの状態推定値の間の差異を表すために使用される。共分散
【数4】
【0040】
に適用される増分が、モードiとjの目標状態推定値と関連付けられている共分散が重複しない場合に(つまりモデルi及びjのモデル目標状態推定値が、第1のインスタンスで整合性がないように見えるときに)追跡手順を通した不確実性の伝搬の整合性を確実にする。該項は、以下のように定められる。
【数5】
【0041】
ここで、以下の式が成り立つ。
【数6】
【0042】
したがって、時間k−1においてモデルjごとに混合される推定値は、上記に定められた条件付き確率uijを重み付けとして使用する、すべての目標ダイナミクスモデルi=1...rのためのxi(k−1|k−1)の線形結合であることが分かる。
【0043】
いったん混合された推定値及び共分散がモデルjごとに計算されると、ステップ202が実行される。ステップ202は、モデルiごとに実行される次の時間ステップに対する標準的なカルマン予測ステップであり、結果として、それぞれ、時間(k−1)までの測定値に基づく時間kにおけるモデルiのモデル目標状態推定値、及び、時間(k−1)までの測定値に基づく時間kにおけるモデルiのモデル目標状態推定値と関連付けられた共分散である、量xi(k|k−1)とPi(k|k−1)を生じさせるステップである。この予測ステップは、各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられたモデル目標状態推定値に適用することを備える―例えば、目標が一定の速度で直線上を移動したことを示す目標ダイナミクスモデルの場合には、予測ステップは、目標の位置を単に速度に時間間隔を乗算した値に等しい分だけ、移動の方向に、前方に移動させるであろう。該モデル目標状態推定値と関連付けられた共分散は、同様に、適切な目標ダイナミクスモデルを適用することにより1つの時間ステップ分前方に伝搬される。
【0044】
次に複合状態推定値及び複合共分散が、以下を使用して計算できる。
【数7】
【0045】
これらの複合量は、確率Ci(k−1)を重み付けとして使用する、上記に定められた量xi(k|k−1)の線形結合である。前述されたように確率Ci(k−1)は、目標ダイナミクスが、混合ステップ201の直後に計算された目標ダイナミクスモデルiと一致する確率である。いったん新しいデータが203に到達すると、複合量x(k|k−1)が関連付けステップ211、221のために使用され得る。新しいデータは、ローカルセンサによって生成される新しいセンサデータまたは別のノードから通信される追跡情報のどちらかとして到着することができる。これらの異なるデータタイプは、図2に描かれている流れ図の中のステップ203における分割によって概略で示されるように、ノードアーキテクチャにおいて異なるように処理されるが、該異なるデータタイプの処理は別個に後述される。
【0046】
新しいデータがローカルノードで生成されるセンサデータである場合には、次にIMM更新手順が行われる。ステップ211では、複合量xi(k|k−1)とPi(k|k−1)とを使用してデータ関連付けが行われる。任意の公知のデータ関連付け技法が使用されてよく、多くのこのような技法がBlackman及びPopoliによって説明されている。ステップ212では、モデル確率が、目標ダイナミクスモデルiごとにカルマンフィルタイノベーション(innovation)vi(k)及びイノベーション共分散Si(k)を使用して更新される。該イノベーションは、予測されたモデル目標状態推定値xi(k|k−1)とローカルセンサによって行われる観察との間の相違に関連する。そして、モデルiごとに、正規化されたスカラー誤差
【数8】
【0047】
が、以下を使用して計算される。
【数9】
【0048】
ガウス仮定(assumption)及びm次元の観察を使用すると、モデルiを使用する観察の尤度は以下を使用して計算される。
【数10】
【0049】
モデル確率は、ベイズ規則を使用して更新され、以下のようになる。
【数11】
【0050】
ここで、Cは以下を使用して計算される正規化定数である。
【数12】
【0051】
これらの更新されたモデル確率は、次に記憶され、追跡手順の次の反復で、混合ステップ201において使用される。センサデータは、次に、各モデルiの目標状態推定値を更新するために、ステップ213において使用される。このステップは標準的なカルマン更新ステップであり、それぞれ、時間kまでの測定値に基づく、時間kにおけるモデルiのためのモデル目標状態推定値と、該モデル目標状態推定値に関連付けられた共分散とを表す量xi(k|k)とPi(k|k)を生じさせる。このモデル目標状態推定値は、予測されたモデル目標状態推定値と、関連する目標ダイナミクスモデルのイノベーションとの、重みを付けられた合計値を使用して取得され、該重み付けは共分散Pi(k|k)を最小限に抑えるように計算されるものである。
【0052】
ステップ204で、ユーザのために出力が生成される。ユーザ出力は、それぞれ複合目標状態推定値及び該複合目標状態推定値に関連付けられた共分散を表し、それぞれ以下の式で示されるように、更新されたモデル確率を用いて重み付けられた個々のモデル目標状態推定値の線形結合を使用して計算される量x(k|k)、及び、更新されたモデル確率を使用して重み付けられた個々のモデル共分散の線形結合を使用して計算される量P(k|k)の形式を取る。
【数13】
【0053】
ステップ205では、更新された追跡情報が該ネットワーク内の選択された他のノードに通信される。本発明の該第1の実施形態によると、更新された追跡情報は上記の複合量x(k|k)とP(k|k)だけを備える。
【0054】
ステップ203に戻ると、到着するデータが局所的に生成されるのではなく、遠隔ノードから受け取られる場合には、ステップ221、222及び223が実行される。本実施形態では、該遠隔ノードから到着するデータは、追跡情報を備え、該追跡情報は、該遠隔ノードに記憶されている追跡情報に基づいて、該遠隔ノードによって計算される複合量x(k|k)及びP(k|k)を備える。ステップ221は、前述されたステップ211に類似するデータ関連付けステップであり、Blackman及びPopoliによって説明されている技法のような任意の公知のデータ関連付け技法を使用して実行できる。
【0055】
受け取られた複合推定値は、局所的に生成されるセンサデータと同じように処理することができない。ネットワークは1つのノードも大局的な知識を有さない非集中型ネットワークであるため、受け取られた追跡情報と該ノードにすでに記憶されている情報の間に相関性がある場合がある。これに対し、ローカルノードでセンサによって行われる観察を通して局所的に生成されるデータは、すでに記憶されているデータと相関性がないことが分かっている。したがって、受け取られた追跡情報は、局所的に生成されるデータのために使用されるカルマン更新ではなく、相関性のあるデータを融合するときに整合性を保つ保守的な融合アルゴリズムを使用してステップ222で局所的な追跡情報と融合される。遠隔ノードから受け取られた追跡情報が、ローカルノードですでに記憶されている追跡情報と相関性があった場合、カルマン更新は、目標状態推定値の不確実性のあまりに楽観的な推定値を生じさせるであろう。代りに、保守的な融合技法は相関関係の存在を許容し、楽観的すぎる推定を行うことを回避する。
【0056】
例示的なこのようなアルゴリズムは、D.Hall及びJ.Linasによって編集され、CRC出版(CRC Press)(2001年)によって出版された「データ融合のハンドブック(Handbook of Data Fusion)」の中で発表された「共分散交差との一般的な非集中型データ融合(General Decentralized Data Fusion with Covariance Intersection)」の中で著者S.Julier及びJ.Uhlmannによって説明されている共分散交差(CI)アルゴリズムである。本実施形態では、時間kで遠隔ノードから受け取られる複合推定値Aを、ローカルノードで実現される相互作用複数モデルアルゴリズムで使用される各モデルiの現在のモデル目標状態推定値と融合するために、共分散交差アルゴリズムが使用される。このようにして、平均値及び共分散が、以下で表される。
【数14】
【0057】
ここで、添字Aを有する量が遠隔ノードから受け取られる複合推定値に関し、添字iを有する量がローカルノードにおけるモデルiに対するモデル目標状態推定値に関する場合に、該平均値及び共分散を有する推定値の共分散交差更新は以下のように書かれる。
【数15】
【0058】
ここで、ωは、結果として生じる共分散行列PC(k|k)の行列式が最小限に抑えられるように選択される。当業者によって理解されるように、ωは、また、結果として生じる共分散行列PC(k|k)のトレース等の何らかの他のヒューリスティック(heuristic)を最小限に抑えるように選ぶこともできるであろう。該同じ問題が情報空間で表されるとき、該推定値は以下のように書き直すことができる。
【数16】
【0059】
CI更新は以下のようにさらに簡略な形式を取る。
【数17】
【0060】
この処理はローカルノードにおいて目標ダイナミクスモデルiごとに繰り返され、このようにして各モデルを遠隔ノードからの追跡情報で更新する。
【0061】
次に、モデル確率更新ステップ223が実行される。局所的に生成されたセンサデータを処理するとき、これはイノベーション情報を使用してベイズ更新(Bayesian update)を通して行われる。しかしながら、共通の情報が存在する可能性があるため、これは、受け取られた追跡情報を融合するときに、一般的に、可能なわけではない。したがって、本実施形態では、さらに一般的なベイジアンネットワークの構築が実現される。この構築は追跡目的を推測するために種々のデータを使用できるため、モデル確率を直接的に更新できる。コンテキストデータは、電子監視手段からのデータ、ジャミング信号の検出、IFF(敵味方識別)システムからの情報、または追跡されているプラットホームのタイプに関するデータを含むことができる。例えば、大型輸送機は、小型航空機より高G作戦行動を行う可能性が低いと考えられることができる。さらなる例としては、ジャミング信号が検出された場合、作戦行動の発生の尤度の上昇が推測される可能性がある。したがって、高G作戦行動を表す目標ダイナミクスモデルのモデル確率は増加するが、一定速度運動を表す目標ダイナミクスモデルのモデル確率は減少するであろう。ベイジアンネットワーク構築により、すべてのこのような情報を効率的に結合でき、これによりモデル確率を直接的に更新することができる。従来の更新は(図2に示されているフローチャートに描かれているようなステップ211、212及び213を備える)ローカルデータの経路のために保持されるが、ベイジアンネットワーク構築は、(図2に示されているフローチャートのステップ221、222、及び223を備える)データ融合経路における観察イノベーションに基づく更新に取って代わる。
【0062】
本発明の該第1の実施形態による方法の実現がネットワークトポロジに制限を課さず、任意のネットワークにおいて完全に整合していることが留意される。したがって、第1の実施形態の追跡方法は任意のネットワークにおいて実現されるように適応可能である。
【0063】
本発明の第2の実施形態がここで説明される。第2の実施形態は、追跡情報が、複合目標状態推定値及び該複合目標状態推定値に関連付けられた共分散だけを備えるのではなく、モデル目標状態推定値及び該モデル目標状態推定値に関連付けられた共分散のそれぞれを備えるという点を除き、前述された第1の実施形態に非常に類似している。したがって、第2の実施形態によると、ノードのすべては同じ目標ダイナミクスモデルを使用してIMMアルゴリズムを実現しなければならない。局所的に生成されるデータは、第1の実施形態を参照して前述されたのと同じように扱われる。
【0064】
遠隔ノードからローカルノードへ、複合目標状態推定値だけでなく、個々のモデル目標状態推定値のすべての集合を通信することにより、ローカルノードがさらに大量のデータを送信するために必要とされる余分な帯域幅を犠牲にするが、さらに優れた解決策が達成できる。図2を参照し直すと、ステップ204で遠隔ノードから追跡情報を受け取ると、ローカルノードは、第1の実施形態に関して前述されたように、データ関連付けステップ221を実行してから、ステップ222において、受け取られたモデル目標状態推定値のそれぞれを、該推定値に対応する局所モデル目標状態推定値と融合するために共分散交差アルゴリズムを使用する。第2の実施形態のための共分散交差アルゴリズムの実現例は、第1の実施形態のための実現例に類似しているので、要約してのみ説明される。目標ダイナミクスモデルiごとの更新方程式は、以下のように書かれる。
【数18】
【0065】
ここで、Yiとyiはモデルiの局所情報状態であり、YAiとyAiは遠隔ノードから通信されるようなモデルiの情報状態である。第1の実施形態においてと同様に、ωは結果として生じる共分散行列の行列式または何か他の好都合なヒューリスティックを最小限に抑えるために選択される。該プロセスはモデルiごとに繰り返される。
【0066】
該モデル確率更新ステップ223は、各局所モデル確率が、遠隔ノードから通信され、該局所モデル確率に対応するモデル確率と融合されるような、保守的な融合プロセスを使用して実行することもできる。例えば、目標状態推定値について前述されたアルゴリズムに類似する共分散交差アルゴリズムが使用できる。ωという値は、該モデル確率分布から導出される任意のヒューリスティックであってよい。代わりに、ステップ222での状態更新のために使用されるωの値を使用することもでき、該モデル確率は該更新ステップの後に適切に正規化し直される。第1の実施形態に関して前述されるように、モデル確率を直接的に更新するためにベイジアンネットワーク構築を使用することも可能である。
【0067】
本発明の該第2の実施形態は、第1の実施形態の場合のように1つの複合推定値だけを通信するのでなく、i個の異なる状態推定値と、該推状態定値に関連付けられたモデル確率を通信することを必要とするため、第1の実施形態よりも多くの集中的な帯域幅(bandwidth intensive)を必要とする。本発明の第2の実施形態による方法の実現は、本発明の第1の実施形態の場合のように、ネットワークトポロジに制限を課さず、任意のネットワークにおいて完全に整合することが留意される。
【0068】
一連の試験が、関連するベンチマークに対して本発明の実施形態の性能を評価するために実行された。試験のシナリオには、8個の検知ノードの領域内を飛行する100個の目標航空機が含まれた。ノードは空間的に分離されており、これにより複数のセンサが各目標を見ることができた。しかしながら、どの時点においても、100個すべての目標を検出できたセンサはなかった。目標航空機は、7Gまでの作戦行動を含む軌跡を飛行した。
【0069】
これらの試験の該結果の例示的な選択が図3に描かれている。図3は、(1秒あたりに通信された追跡の数で測定された)ネットワーク帯域幅に対して、(メートルで測定された)追跡位置誤差の変動を描くグラフである。線310は、追跡選択システムを使用して達成された結果を描いている。このシステムでは、集中型プロセッサがすべての検知ノードから追跡情報を受け取り、最低の既知数(determinate)を有する共分散行列を有する追跡であるように選ばれる最良の追跡を単に選択する。このベンチマークは、該ベンチマークが現在使用されている多くのマルチセンサ追跡システムと同様であるために選ばれた。線320は、遠隔ノードからのデータを融合するために共分散交差アルゴリズムを使用し、及び各ノードで該目標を追跡するために単純なカルマンフィルタを使用する検知ノードの非集中型ネットワークの標準的な実現例を使用して達成される結果を描いている。線330は、本発明の実施形態による非集中型IMM処理を実現する検知ノードのネットワークを使用して達成される結果を描いている。IMMは3つの目標ダイナミクスモデルを使用する。使用されたモデルは本質的には同じであるが、異なるレベルの目標加速が異なるモデルによって対応できるように適切に修正されたパラメータを有するものであった。参照番号340とラベルが付けられた破線は、IMMアルゴリズムを使用するときの性能に対する下界を表し、ネットワークに存在するすべてのセンサから未処理センサデータを受け取る、集中型のIMMアルゴリズムを使用して達成される結果である。しかしながら、これはIMMアルゴリズムにとって最良の達成可能な結果を表す一方、IMMアルゴリズムは、ネットワーク全体で通信されなければならない非常に大量のデータ、及びこれに対応して高帯域幅が要求されるために実際には実現不可能である。
【0070】
各検知ノードが毎秒送信できる追跡の数―つまり、ネットワークが使用可能な帯域幅―が、試験パラメータの1つとして用いられた。これは、本発明の重要な優位点の1つが、低帯域幅通信を使用するように制限されても効率的に動作できる能力であるためである。図3に描かれている結果は、ネットワークが本発明の実施形態による該追跡方法を実現した場合に、すべての帯域幅でネットワークの性能が最良であることを実例で示すものである。いったんネットワーク帯域幅が毎秒100の追跡を超えて上昇すると、本発明の実施形態による追跡方法の性能は、事実上、(破線340によって示されている)下界に近づく。追跡選択アルゴリズムはすべての帯域幅で最悪であり、一方標準DDFアルゴリズムの性能は追跡選択アルゴリズムの性能と、本発明の実施形態による該追跡方法の性能の間の中間である。本発明の実施形態による追跡方法の性能が、試験された帯域幅の範囲全体で、かなりの余裕をもって最良であることに留意すべきである。
【0071】
多様な特殊実施形態に関して本発明を説明してきたが、これらの実施形態がすべての点において例示的であることが留意される。添付請求項に定められている本発明の範囲から逸脱することなく、変形及び改良が可能である。このような変形及び改良は当業者にとってただちに自明になるであろう。例えば、上記では、(図2に示されている)ステップ223において、個々のモデル確率を更新するために、遠隔ノードから受け取られる追跡情報、またはコンテキストデータが、使用できる、考えられる多様な方法が説明されているが、遠隔ノードから受け取られる追跡情報を用いず、局所的に生成されるセンサデータだけを用いてローカルノードでのモデル確率が更新されるように、(図2に示されている)ステップ212のみにおいて、モデル確率を更新することも可能であることが当業者に理解されるであろう。さらに、上記では、検知ノードだけを備えるネットワークが説明されてきたが、ネットワークは非検知ノードをさらに備えてもよいことが理解されるであろう。このような非検知ノードは、検知ノード間で追跡情報を中継する目的で使用されることができる。代わりに、このような非検知ノードはコマンド位置に備えられてもよく、この場合、該非検知ノードが追跡処理機器を備えることは有利であるが、センサに対する必要性はないであろう。ネットワークは複数のセンサを有するノードも備えてよい。
【0072】
最後に、任意の一実施形態に関して前述された任意の特徴は、単独で、もしくは説明された他の特徴と組み合わせて使用されてもよく、または、他の実施形態のいずれかの1つまたは複数の特徴と、もしくは他の実施形態の任意の組み合わせの1つまたは複数の特徴と組み合わせて使用されてもよいことが明確に理解されなければならないことが留意される。
【図面の簡単な説明】
【0073】
【図1】ノードの非集中型ネットワークの概略図である。
【図2】本発明の実施形態による追跡方法を描くフローチャートである。
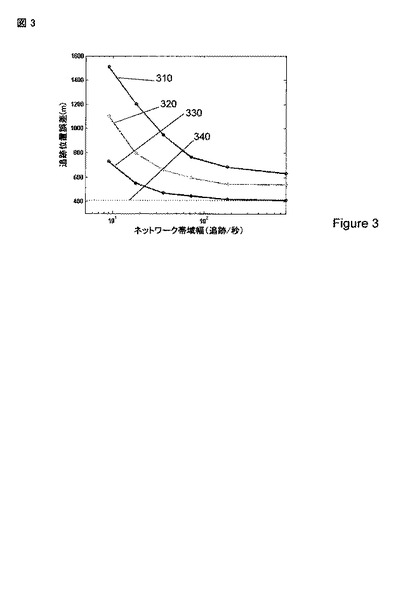
【図3】多くの追跡方法に対するネットワーク帯域幅での追跡位置誤差の変化を描くグラフである。
【技術分野】
【0001】
本発明は目標を追跡するための方法に関する。さらに詳細には、本発明は複数のノードを備える非集中型ネットワークに適用されるこのような方法に関する。ネットワーク内の各ノードは、選択された他のノードと通信し、目標の観察を行うように動作可能である。また、本発明はこのような方法を実施するための手段にも関する。
【背景技術】
【0002】
アーテックハウス(Artech House)(1999年)により出版されたSamuel Blackman及びRobert Popoliによる書籍「現代の追跡システムの設計及び分析(Design and Analysis of Modern Tracking Systems)」に、多くの公知の目標追跡の方法が説明されている。追跡方法のある特定のクラスは、複数のモデルアルゴリズムを使用する。これらの高度な追跡アルゴリズムは、目標のダイナミクスが多くの力学的状態の間で変化することがある場合に適切である。例えば、該目標は直線で飛行したり高G作戦(high-G manoeuvres)を実行したりできる航空機であってもよい。複数のモデル技法は、航空機がこれらの2つの力学的状態の間で遷移するときに、該航空機に正確に追跡できるようにし、任意の数の力学的状態を許容できるように拡張できる。それぞれが目標を追跡するために異なる力学モデルを適用する多くの追跡アルゴリズムは、本質的には並行に実行され、複数のモデルアルゴリズムの出力は各追跡アルゴリズムの予測の組み合わせである。複数モデル追跡アルゴリズムの、ある公知の例はBlackman及びPopoliによって記述された相互作用複数モデル(IMM)アルゴリズムである。該IMMアルゴリズムは、特に効率的な複数モデル追跡アルゴリズムである。
【発明の開示】
【0003】
多くの場合、目標をより広い領域をわたって追跡できるように、あるいは異なるタイプの多くのセンサを使用できるように、多くのセンサを使用して目標を追跡することが望ましい。このような状況において最適な追跡を達成するためには、すべてのセンサからのデータが融合されることが必要である。このような融合に適切な多くのネットワークアーキテクチャが公知である。これらのアーキテクチャは、集中型、分散型、または非集中型として分類できる。
【0004】
大部分の追跡方法は、集中型アーキテクチャまたは分散型アーキテクチャを使用して実現されている。集中型アーキテクチャとは、融合されているデータが融合のために中央処理機器に送信されるアーキテクチャである。該中央機器は目標追跡を出力するためにすべてのデータを処理する。分散型アーキテクチャは、該中央の融合処理が遠隔装置にいくらかの計算上の負荷をかけることがあるという点で異なっている。しかしながら、分散された処理の結果が結合されるためには、やはりシステムの中に中央処理機器が存在しなければならない。したがって、集中型アーキテクチャ及び分散型アーキテクチャの両方とも、中央処理機器がないことがシステム全体の破壊的な障害につながるのは必至であるため、中央処理機器の損失に弱い。さらに、第1に、ネットワークのサイズが拡大するにつれて、中央処理機器に課される計算上の負荷が急激に増大するため、及び第2に、中央処理機器との間で通信しなければならないデータ量が該ネットワークのサイズとともに急激に増加するために、集中型アーキテクチャも、分散型アーキテクチャもスケラブル(scaleable)ではない。したがって、該ネットワークのサイズは、通信に使用可能な帯域幅及び該中心処理機器の計算能力によって制限される。
【0005】
非集中型アーキテクチャは、例えば、情報融合に関する第4回国際会議(4th International Conference on Information Fusion)、カナダ(Canada)2001年の会報に発表されたHugh Durrant−Whyte及びMike Sternsによる論文「非集中型検知ネットワークにおけるデータ融合(Data Fusion in Decentralized Sensing Networks)」から知られている。非集中型ネットワークには中央処理機器はない。各ノードは、局所的なセンサによる観測、及びネットワーク内の選択された他のノードによって該ノードに通信される情報に基づいて、大局的な推定値を形成できる。通常、これらの他のノードは隣接する、あるいは最も近い近傍のノードである。集中型アーキテクチャ及び分散型アーキテクチャと対照的に、検知、処理、または通信の構成要素は非集中型アーキテクチャを有するネットワークの動作にとっては重大ではない。したがって、任意の単一の要素の故障は、分散型アーキテクチャまたは集中型アーキテクチャを有するネットワークで起こるであろうような破壊的なシステム故障ではなく、性能の増分的な減少を生じさせるにすぎない。さらに、ノードは大局的なネットワークトポロジの知識を必要としないため、システムは単に新しい検知ノードをシステムに接続するだけで拡大できる。分散型システム及び集中型システムとは対照的に、計算要件及び帯域幅要件は、ネットワークのサイズの拡大に伴って増加しない。通信は、1つまたは複数のノードがネットワーク全体でブロードキャストすることを必要とするのではなく、ノード対ノード単位で管理される。
【0006】
非集中型ネットワークは、中央処理機器がないこと、ネットワーク内のいかなるノードもネットワークトポロジ全体の知識を有する必要がない(ノードは選択された他のノードについてのみ知っている必要がある)こと、及び共通の通信機器が必要ないことによって特徴付けられている。これらの特徴は、非集中型アーキテクチャが集中型システムまたは分散型システムよりさらに頑健で、さらにスケラブルで、さらにモジュール式(modular)であることを保証する。
【0007】
残念なことに、非集中型追跡システムは今日まで単純な追跡アルゴリズムを実現できるにすぎなかった。したがって、このようなシステムは複雑な演習を行う目標を効率的に追跡することはできない。IMMアルゴリズムを実現する分散型ネットワークアーキテクチャは、例えば、推定、追跡及び融合に関するワークショップ:Yaakob Bar−Shalomに対する賛辞(Workshop on Estimation, Tracking and Fusion: A Tribute to Yaakob Bar-Shalom)、カリフォルニア州モンテレー(Monterey CA)、2001年の会報の中で発表されたT.Ito及びM.Faroqによる論文「複数センサ追跡融合のための集中型及び非集中型IMMアルゴリズム(Centralized and Decentralised IMM Algorithms for Multisensor Track Fusion)」から知られているが、該IMMアルゴリズムは、実際には、本願の意味で非集中型のIMMアルゴリズムではなく、遠隔検知ノードから推定値を融合するために集中型処理を保持する分散型IMMアルゴリズムを開示する。各ノードは、局所的に生成されたデータ対してだけIMM手順を実行し、中央融合装置が、これらの結果として生じる推定値を結合する。このような処理は本発明の意味では非集中型ではないため、依然として前述された問題及び不利な点を示す。
【0008】
前述された背景に対して、本発明は前記に特定された問題のいくつかを克服する、あるいは少なくとも部分的に軽減することを目的とする。現在知られている追跡システムより、演習中の目標を効果的に追跡でき、スケラブルで、頑健で、モジュール式である非集中型追跡システムを提供することが本発明のさらなる目的である。
【0009】
大きく見ると、本発明は、複数モデル追跡技法を使用して目標を追跡するように動作可能なセンサの非集中型ネットワークを提供すること、及び非集中型ネットワーク内で複数モデル追跡アルゴリズムを実現することにまつわる問題を克服することに関する。
【0010】
本発明の第1の態様によると、各ノードが、目標観察を行うように動作可能なセンサと、追跡情報を送信、受信するように動作可能な通信手段と、追跡情報を記憶するように動作可能な記憶手段とを備える、複数のノードを備える非集中型ネットワークに適用される目標を追跡する方法が提供される。前記方法は、ローカルノードにおいて、
(i)目標ダイナミクスモデルの集合を提供するステップと、
(ii)初期モデル確率の集合を提供するステップであって、各初期モデル確率は目標ダイナミクスモデルの前記集合の1つと関連付けられ、各初期モデル確率は該初期モデル確率と関連付けられた目標ダイナミクスモデルが目標ダイナミクスと一致する確率に関連するものと、
(iii)初期モデル目標状態推定値の集合を提供するステップであって、各初期モデル目標状態推定値が目標ダイナミクスモデルの前記集合の1つと関連付けられているようなものと、
(iv)各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられた初期モデル目標状態推定値に適用することによって、予測されるモデル目標状態推定値の集合を計算するステップと、
(v)前記ローカルノードで行われている目標観察に応えて、第1の追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vi)遠隔ノードから該ローカルノードで受け取られる追跡情報に応えて、第2の目標追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vii)前記ネットワーク内の選択された他のノードに、更新された追跡情報を通信するステップと、を実行することを備え、
前記第1の追跡手順は、
(a)前記目標観察と前記予測されたモデル目標状態推定値との間の差異に依存して、更新されたモデル確率を計算するステップと、
(b)前記予測されたモデル目標状態推定値及び前記目標観察に依存して更新されたモデル目標状態推定値を計算するステップと、
(c)前記更新されたモデル確率に関連する重み付けを使用して前記予測されたモデル目標状態推定値を結合することによって複合予測目標状態推定値を計算するステップと、
を備え、
前記第2の追跡手段は、
(a)融合された追跡情報を生成するために、前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップを備える。
【0011】
前記追跡情報は、前記更新された複合目標状態推定値、前記更新されたモデル目標状態推定値、及び前記更新されたモデル確率の1つまたは複数を備える。該方法は、前記ネットワークの各ノードで上記のステップ(i)から(vii)を繰り返すステップと、次に、前記初期モデル確率及び前記初期モデル目標状態推定値の代りに、直前の反復からの前記更新されたモデル確率、及び前記更新されたモデル目標状態推定値を使用することによって前記ネットワーク内の各ノードで上記のステップ(iv)から(vii)を反復するステップをさらに備えてもよい。
【0012】
本発明による方法は、該追跡方法のアルゴリズム構造がネットワーク内の各ノードで同じであるために非集中型ネットワークにおいて実現できる。したがって非集中型ネットワークと関連付けられる優位点は、本発明にも備わるものである。すなわち、本発明による方法はスケラブルで、頑健で、モジュール式である。本発明による方法を具現化するネットワーク内の通信に必要とされる帯域幅はネットワークサイズの拡大とともに拡大しないため、このようなネットワークには任意の数のノードを組み込むことができる。このようなネットワーク内で任意の1つのノードが失われると、どのノードが失われたのかに関係なく、ネットワーク全体の性能の増分的な損失が生じるにすぎない。しかしながら、複数モデル追跡アルゴリズムを実現することによって、本発明による方法は以前に公知であった非集中型追跡方法よりはるかに優れた追跡性能を示す。詳しく後述される、本発明のある特定の実施形態では、(添付図面の図3に示されているように)毎秒10から1000追跡の範囲の帯域幅について130mと360mの間の追跡位置誤差が改善される。したがって、本発明は低通信帯域幅での使用に特に適していることが分かる。
【0013】
本発明は、有利なことに、ノードのネットワークが、少量のデータだけ(例えば、ノードの複合目標状態推定値だけ)を通信する一方、非集中型ネットワークアーキテクチャを使用して動作できるようにする。該アルゴリズムはネットワークのトポロジに制限を課さず、任意のネットワークにおいて完全に自己整合している。さらに、遠隔ノードからの追跡情報を該ローカルノードで記憶されている追跡情報と融合すると、局所推定値の質が改善される。少量のデータしかネットワークを通して通信されないのにも関わらず、この推定値の質の改善が達成される。したがって、本発明が、非常に低いネットワーク帯域幅だけを使用する利点を維持しつつ、一方目標状態推定値の質を向上することは容易に明らかである。
【0014】
該方法は、第1の初期モデル目標状態推定値に、他の初期モデル目標状態推定値のそれぞれの割合を結合することにより、初期モデル目標状態推定値を混合するステップであって、該割合は、直前の反復中に、前記目標ダイナミクスが該他の初期モデル目標状態推定値に関連付けられた目標ダイナミクスモデルと一致する状態から、該第1の初期モデル目標状態推定値と関連付けられた目標ダイナミクスモデルと一致する状態に遷移する確率に関連するものと、初期モデル目標状態推定値ごとに前記結合手順を繰り返すステップとをさらに備えてもよい。
【0015】
前記第1の追跡手順は、前記目標観察を前記ローカルノードに記憶されている前記追跡情報と関連付けるステップをさらに備えてもよい。前記第2の追跡手順は、前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と関連付けるステップをさらに備えてもよい。前記目標観察を、または場合によっては前記受け取られた追跡情報を、ローカルノードに記憶されている追跡情報に関連付けるステップは、追跡手順が雑音信号及び反射波信号の存在下で頑健に機能することを可能にする。さらに、このデータ関連付けステップは、ネットワークが複数の目標を同時に追跡できるようにする。
【0016】
前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップは、共分散交差(covariance intersection)アルゴリズムを適用することを備えてもよい。該共分散交差アルゴリズムはデータを融合するための保守的なアルゴリズムの、1つの好都合な例である。
【0017】
前記第2の追跡手順は、ベイジアン(Baysian)ネットワークの適用により初期モデル確率を更新するステップを備えてもよい。ベイジアンネットワークは、モデル確率を更新するときに、例えば、ジャミング(jamming)信号が検出されたかどうか等の多岐に渡るコンテキストデータを考慮に入れることができる。
【0018】
本発明の例示的な一実施形態によれば、前記追跡情報は前記更新された複合目標状態推定値を備えてもよい。したがって、各ノードは該複合目標状態推定値だけを送受信し、必要とされる帯域幅は低い。次に、前記複数のノードは、少なくとも第1のノードと第2のノードを備えてもよく、前記第1のノードにおいて提供される目標ダイナミクスモデルの前記集合は、前記第2のノードにおいて提供される目標ダイナミクスモデルの前記集合と異なってもよい。有利なことに、各ノードが同じ目標ダイナミクスモデルを動作することが要求されないため、該ネットワークはさらなるノードの追加により良く適応できる。
【0019】
代わりに、本発明の別の例示的な実施形態によれば、前記追跡情報は前記更新されたモデル目標状態推定値及び前記更新されたモデル確率を備えてもよい。次に前記ネットワーク内の各ノードに、同じ集合の目標ダイナミクスモデルが提供されてもよいよい。さらに多くの追跡情報を通信することによって、複合目標状態推定値だけがネットワークノード間で通信されるときに必要とされるより大きな帯域幅を必要とすることを犠牲にするが、各ノードは、さらに優れた目標状態推定値を達成できる。前記第2の追跡手順は、次に、受け取られた、更新されたモデル目標状態推定値のそれぞれを、該更新されたモデル目標状態推定値に対応する局所モデル目標状態推定値と保守的に融合することと、受け取られた、更新されたモデル確率それぞれを該更新されたモデル確率のそれぞれに対応する局所的な確率と保守的に(conservatively)融合することとを備えてもよい。
【0020】
本発明の第2の態様によると、目標を追跡する方法が提供され、前記方法は複数のノードを備える非集中型ネットワークに適用される、前記方法は、
(i)第1のノードが複数モデル追跡アルゴリズムを実行し、それによって該第1のノードに記憶されている追跡情報を更新するステップと、
(ii)前記第1のノードは、前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
(iii)前記第1のノードは、別のノードから追跡情報を受け取ることに応えて、前記受け取る追跡情報を局所的な追跡情報と保守的に(conservatively)融合するステップと、
(iv)前記ネットワーク内の各ノードでステップ(i)から(iii)を繰り返すステップと、
を備える。
【0021】
好ましくは、前記複数のモデルアルゴリズムは、相互作用(interacting)複数モデルアルゴリズムである。前記相互作用複数モデルアルゴリズムは、特に有効な複数モデルアルゴリズムである。
【0022】
本発明は、前述されたような方法を実行するように適応されるノードの非集中型ネットワークに及ぶ。本発明はさらに、実行されるときに、前述されたような方法を実施するように動作可能なコンピュータプログラムにも及ぶ。
【0023】
本発明の前記の、及び追加の特徴は特に添付請求項に述べられ、添付図面に関して詳しく後述される。
【発明を実施するための最良の形態】
【0024】
後述されるすべての実施形態に共通した非集中型ネットワークが図1に描かれている。ネットワーク100はノード110、120、130、140、150、160、及び170を備える。該ノードのそれぞれは処理通信手段と、センサとを備える。例えば、ノード110はセンサ112と、処理通信手段114とを備える。センサ112は、例えばレーダセンサであってもよい。明確にするため、残りのノードの構成要素には名前を付けられていないが、ノード120、130、140、150、160及び170がノード110と同じタイプの、あるいは異なるタイプのセンサを備えてもよいことが理解されるであろう。ネットワークが目標を追跡するために使用されるとき、各ノードは該目標の状態の詳細を備える追跡情報を出力する。この情報は目標の位置、速度、目標タイプ等の他の属性の詳細またはこのような詳細の混合を含んでもよい。これらの機能を実行するための手段を備える個々のノードは、図1において破線で囲まれている。
【0025】
該ネットワークは非集中型ネットワークである。各ノードは選択された他のノードだけと通信する。例えば、ノード170は矢印190によって概略で示されるように、ノード130、140及び160と通信している。図1の概略説明図からは直ちには分からないが、実際には、各ノードは該各ノードに最も近い近傍のノードと通信している。さらに各ノードは、目標状態推定値を生成するために、局所的に生成された追跡情報と、他のノードから該各ノードに通信される追跡情報の両方を処理するよう動作できる。したがって、例えばノード140で生成される目標状態推定値は、例えば、ノード160で生成される追跡情報を含むネットワーク100全体で生成される追跡情報に基づくことが理解されるであろう。これは、ノード140はノード160と直接的に通信していないが、該ノード140は、ノード150とは直接的に通信し、該ノード150が次にノード160と直接的に通信しているためである。したがって、ノード160で生成される追跡情報は、該追跡情報がノード150の目標状態推定値に及ぼす影響を通してノード140における目標状態推定値に影響を及ぼす。こうして、ネットワーク100内の各ノードは大局的な追跡情報に基づいて目標状態推定値を生成する。
【0026】
図2は、本発明の第1の実施形態による方法を使用して目標状態推定値を生成する上で各ノードによって実行されるステップを描くフローチャートである。本質的には、各ノードは、該各ノードが使用できる追跡情報に基づいて相互作用複数モデル(interacting multiple models)(IMM)アルゴリズムを実現するが、このとき、局所的に生成され、公知のIMM実現例で行われるのと実質的に同様に処理されるセンサデータと、ネットワーク内の他のノードから受け取られ、保守的な融合技法を使用することにより局所的に記憶されている追跡情報に組み込まれるデータとを用いる。IMMアルゴリズムは複数モデルアルゴリズムの一例である。IMMアルゴリズムは、多様な力学的な状態の間で遷移する目標を表すために、マルコフモデルを使用して、複数モデルからの推定値と共分散を結合する。
【0027】
本発明の第1の実施形態によると、ノード110、120、130、140、150、160及び170は、同じまたは異なる目標ダイナミクスモデルを使用してIMMアルゴリズムを実現してよい。最初に、各ノードは、該各ノードの局所的なIMMの実現において使用される各目標ダイナミクスモデルに初期モデル目標状態推定値と、初期モデル確率とが与えられるように初期化される。各初期モデル目標状態推定値は、初期共分散と関連付けられており、該初期共分散は、該初期共分散に関連付けられた初期モデル目標状態推定値の不確実性を定量化するものである。いったんこのようにして初期化されると、ノードは、直前の反復からのモデル確率及びモデル目標状態推定値を、反復ごとの初期モデル目標状態推定値及び初期モデル確率として使用して、描かれているステップを反復して実行するよう動作可能である。したがって、明確にするために、ラベル「初期」は以後の説明で削除される。本アルゴリズムは誤差に敏感ではないため、初期モデル目標状態推定値は、比較的自由に選ばれてよいことに留意すべきである。
【0028】
図2に示されているフローチャートに描かれている構造は、一般論として以下のように説明できる。ステップ201と202は混合ステップ及び予測ステップである。これらのステップは多様なモデル推定値を混合し、そして、混合モデル推定値を使用して現在の目標状態を予測する。混合ステップは、個々のモデル目標状態推定値が互いから逸れないことを確実にする。ステップ203に達するデータに応えて、ノードは、データが局所的に生成される場合には標準的な相互作用複数モデルアルゴリズムを実行する(ステップ211から213)か、あるいは、該データが別のノードから受け取られる場合には、ステップ211から223を通して該データを局所データと融合するかのどちらかである。この処理は、関連付けられた更新済みの共分散を伴う更新されたモデル目標状態推定値の集合、及び更新されたモデル確率の集合を生じさせる。ステップ211から213からなる経路を通して生成されたか、あるいは、211から223からなる経路を通して生成された、これらの更新された量は、IMMアルゴリズムの次の反復で使用される。多様なモデル目標状態推定値の組み合わせであるか、あるいは、単に関連づけられるモデル確率が最高であるモデル目標状態推定値かを備える出力がステップ204でユーザに通信され、そして、ステップ205で更新された追跡情報がネットワーク内の選択された他のノードに送信される。
【0029】
時間−ステップkで、図2に示されているフローチャートによって概略で描かれているアルゴリズムの反復が、ここで詳しく説明される。該アルゴリズムが実行されているノードは、以下の説明では、ローカルノードと呼ばれ、ネットワーク内の他のノードは遠隔ノードと呼ばれる。ネットワーク100の非集中型アーキテクチャにより、ローカルノードはネットワーク100内に備えられているノード110、120、130、140、150、160または170のいずれでもあり得ること、及び後述される同じステップが各ノードで実行されることが当業者によって理解されるだろう。
【0030】
ステップ201は、時間−ステップ(k−1)についてモデル目標状態推定値及び該モデル目標状態推定値に関連付けられた共分散と、モデル確率とが計算された直後に開始する。ステップ201は、時間(k−1)での各目標ダイナミクスモデルからのモデル目標状態推定値がともに混合され、こうして目標ダイナミクスが時間ステップ(k−1)と時間ステップkの間の時間間隔において目標ダイナミクスモデル間を遷移する可能性を表し、多様なモデル目標状態推定値が大きすぎる範囲まで逸れないことを確実にする。本実施形態では、ローカルノードで実現される相互作用複数モデルアルゴリズムは目標ダイナミクスモデル1...i,j,...rを備え、以下の量が定められる。
【0031】
xi(k−1|k−1)は、時間k−1までのすべての測定値に基づいた、時間k−1における目標ダイナミクスモデルiのモデル目標状態推定値である。
【0032】
Pi(k−1|k−1)は、xi(k−1|k−1)と関連付けられる共分散である。
【0033】
ui(k−1)は、目標ダイナミクスが時間k−1における目標ダイナミクスモデルiと一致する確率である。
【0034】
uij(k−1)は、目標が、該目標のダイナミクスがモデルjと一致する状態にあり、かつ、該目標が、該目標のダイナミクスが時間ステップk−1において目標ダイナミクスモデルiと一致していた状態から、モデルjと一致する状態に遷移したことを前提とした、条件付き確率である。
【0035】
Pijは、目標が、当初、該目標のダイナミクスが目標ダイナミクスモデルiと一致する状態にあり、かつ、該目標が、該目標のダイナミクスが目標ダイナミクスモデルjと一致する状態に遷移することを前提とした、条件付き確率である。
【0036】
上記の定義を前提とすると、以下が分かる。
【数1】
【0037】
ここで、Cj(k−1)は、混合ステップ201が完了した後に、目標ダイナミクスが目標ダイナミクスモデルjと一致する確率であり、以下によって計算されるものである。
【数2】
【0038】
したがって、混合モデル目標状態推定値及び該目標状態推定値に関連付けられる共分散は、モデルjごとに以下を使用して計算される。
【数3】
【0039】
ここで、項DPij(k−1)は、目標ダイナミクスモデルiとjの状態推定値の間の差異を表すために使用される。共分散
【数4】
【0040】
に適用される増分が、モードiとjの目標状態推定値と関連付けられている共分散が重複しない場合に(つまりモデルi及びjのモデル目標状態推定値が、第1のインスタンスで整合性がないように見えるときに)追跡手順を通した不確実性の伝搬の整合性を確実にする。該項は、以下のように定められる。
【数5】
【0041】
ここで、以下の式が成り立つ。
【数6】
【0042】
したがって、時間k−1においてモデルjごとに混合される推定値は、上記に定められた条件付き確率uijを重み付けとして使用する、すべての目標ダイナミクスモデルi=1...rのためのxi(k−1|k−1)の線形結合であることが分かる。
【0043】
いったん混合された推定値及び共分散がモデルjごとに計算されると、ステップ202が実行される。ステップ202は、モデルiごとに実行される次の時間ステップに対する標準的なカルマン予測ステップであり、結果として、それぞれ、時間(k−1)までの測定値に基づく時間kにおけるモデルiのモデル目標状態推定値、及び、時間(k−1)までの測定値に基づく時間kにおけるモデルiのモデル目標状態推定値と関連付けられた共分散である、量xi(k|k−1)とPi(k|k−1)を生じさせるステップである。この予測ステップは、各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられたモデル目標状態推定値に適用することを備える―例えば、目標が一定の速度で直線上を移動したことを示す目標ダイナミクスモデルの場合には、予測ステップは、目標の位置を単に速度に時間間隔を乗算した値に等しい分だけ、移動の方向に、前方に移動させるであろう。該モデル目標状態推定値と関連付けられた共分散は、同様に、適切な目標ダイナミクスモデルを適用することにより1つの時間ステップ分前方に伝搬される。
【0044】
次に複合状態推定値及び複合共分散が、以下を使用して計算できる。
【数7】
【0045】
これらの複合量は、確率Ci(k−1)を重み付けとして使用する、上記に定められた量xi(k|k−1)の線形結合である。前述されたように確率Ci(k−1)は、目標ダイナミクスが、混合ステップ201の直後に計算された目標ダイナミクスモデルiと一致する確率である。いったん新しいデータが203に到達すると、複合量x(k|k−1)が関連付けステップ211、221のために使用され得る。新しいデータは、ローカルセンサによって生成される新しいセンサデータまたは別のノードから通信される追跡情報のどちらかとして到着することができる。これらの異なるデータタイプは、図2に描かれている流れ図の中のステップ203における分割によって概略で示されるように、ノードアーキテクチャにおいて異なるように処理されるが、該異なるデータタイプの処理は別個に後述される。
【0046】
新しいデータがローカルノードで生成されるセンサデータである場合には、次にIMM更新手順が行われる。ステップ211では、複合量xi(k|k−1)とPi(k|k−1)とを使用してデータ関連付けが行われる。任意の公知のデータ関連付け技法が使用されてよく、多くのこのような技法がBlackman及びPopoliによって説明されている。ステップ212では、モデル確率が、目標ダイナミクスモデルiごとにカルマンフィルタイノベーション(innovation)vi(k)及びイノベーション共分散Si(k)を使用して更新される。該イノベーションは、予測されたモデル目標状態推定値xi(k|k−1)とローカルセンサによって行われる観察との間の相違に関連する。そして、モデルiごとに、正規化されたスカラー誤差
【数8】
【0047】
が、以下を使用して計算される。
【数9】
【0048】
ガウス仮定(assumption)及びm次元の観察を使用すると、モデルiを使用する観察の尤度は以下を使用して計算される。
【数10】
【0049】
モデル確率は、ベイズ規則を使用して更新され、以下のようになる。
【数11】
【0050】
ここで、Cは以下を使用して計算される正規化定数である。
【数12】
【0051】
これらの更新されたモデル確率は、次に記憶され、追跡手順の次の反復で、混合ステップ201において使用される。センサデータは、次に、各モデルiの目標状態推定値を更新するために、ステップ213において使用される。このステップは標準的なカルマン更新ステップであり、それぞれ、時間kまでの測定値に基づく、時間kにおけるモデルiのためのモデル目標状態推定値と、該モデル目標状態推定値に関連付けられた共分散とを表す量xi(k|k)とPi(k|k)を生じさせる。このモデル目標状態推定値は、予測されたモデル目標状態推定値と、関連する目標ダイナミクスモデルのイノベーションとの、重みを付けられた合計値を使用して取得され、該重み付けは共分散Pi(k|k)を最小限に抑えるように計算されるものである。
【0052】
ステップ204で、ユーザのために出力が生成される。ユーザ出力は、それぞれ複合目標状態推定値及び該複合目標状態推定値に関連付けられた共分散を表し、それぞれ以下の式で示されるように、更新されたモデル確率を用いて重み付けられた個々のモデル目標状態推定値の線形結合を使用して計算される量x(k|k)、及び、更新されたモデル確率を使用して重み付けられた個々のモデル共分散の線形結合を使用して計算される量P(k|k)の形式を取る。
【数13】
【0053】
ステップ205では、更新された追跡情報が該ネットワーク内の選択された他のノードに通信される。本発明の該第1の実施形態によると、更新された追跡情報は上記の複合量x(k|k)とP(k|k)だけを備える。
【0054】
ステップ203に戻ると、到着するデータが局所的に生成されるのではなく、遠隔ノードから受け取られる場合には、ステップ221、222及び223が実行される。本実施形態では、該遠隔ノードから到着するデータは、追跡情報を備え、該追跡情報は、該遠隔ノードに記憶されている追跡情報に基づいて、該遠隔ノードによって計算される複合量x(k|k)及びP(k|k)を備える。ステップ221は、前述されたステップ211に類似するデータ関連付けステップであり、Blackman及びPopoliによって説明されている技法のような任意の公知のデータ関連付け技法を使用して実行できる。
【0055】
受け取られた複合推定値は、局所的に生成されるセンサデータと同じように処理することができない。ネットワークは1つのノードも大局的な知識を有さない非集中型ネットワークであるため、受け取られた追跡情報と該ノードにすでに記憶されている情報の間に相関性がある場合がある。これに対し、ローカルノードでセンサによって行われる観察を通して局所的に生成されるデータは、すでに記憶されているデータと相関性がないことが分かっている。したがって、受け取られた追跡情報は、局所的に生成されるデータのために使用されるカルマン更新ではなく、相関性のあるデータを融合するときに整合性を保つ保守的な融合アルゴリズムを使用してステップ222で局所的な追跡情報と融合される。遠隔ノードから受け取られた追跡情報が、ローカルノードですでに記憶されている追跡情報と相関性があった場合、カルマン更新は、目標状態推定値の不確実性のあまりに楽観的な推定値を生じさせるであろう。代りに、保守的な融合技法は相関関係の存在を許容し、楽観的すぎる推定を行うことを回避する。
【0056】
例示的なこのようなアルゴリズムは、D.Hall及びJ.Linasによって編集され、CRC出版(CRC Press)(2001年)によって出版された「データ融合のハンドブック(Handbook of Data Fusion)」の中で発表された「共分散交差との一般的な非集中型データ融合(General Decentralized Data Fusion with Covariance Intersection)」の中で著者S.Julier及びJ.Uhlmannによって説明されている共分散交差(CI)アルゴリズムである。本実施形態では、時間kで遠隔ノードから受け取られる複合推定値Aを、ローカルノードで実現される相互作用複数モデルアルゴリズムで使用される各モデルiの現在のモデル目標状態推定値と融合するために、共分散交差アルゴリズムが使用される。このようにして、平均値及び共分散が、以下で表される。
【数14】
【0057】
ここで、添字Aを有する量が遠隔ノードから受け取られる複合推定値に関し、添字iを有する量がローカルノードにおけるモデルiに対するモデル目標状態推定値に関する場合に、該平均値及び共分散を有する推定値の共分散交差更新は以下のように書かれる。
【数15】
【0058】
ここで、ωは、結果として生じる共分散行列PC(k|k)の行列式が最小限に抑えられるように選択される。当業者によって理解されるように、ωは、また、結果として生じる共分散行列PC(k|k)のトレース等の何らかの他のヒューリスティック(heuristic)を最小限に抑えるように選ぶこともできるであろう。該同じ問題が情報空間で表されるとき、該推定値は以下のように書き直すことができる。
【数16】
【0059】
CI更新は以下のようにさらに簡略な形式を取る。
【数17】
【0060】
この処理はローカルノードにおいて目標ダイナミクスモデルiごとに繰り返され、このようにして各モデルを遠隔ノードからの追跡情報で更新する。
【0061】
次に、モデル確率更新ステップ223が実行される。局所的に生成されたセンサデータを処理するとき、これはイノベーション情報を使用してベイズ更新(Bayesian update)を通して行われる。しかしながら、共通の情報が存在する可能性があるため、これは、受け取られた追跡情報を融合するときに、一般的に、可能なわけではない。したがって、本実施形態では、さらに一般的なベイジアンネットワークの構築が実現される。この構築は追跡目的を推測するために種々のデータを使用できるため、モデル確率を直接的に更新できる。コンテキストデータは、電子監視手段からのデータ、ジャミング信号の検出、IFF(敵味方識別)システムからの情報、または追跡されているプラットホームのタイプに関するデータを含むことができる。例えば、大型輸送機は、小型航空機より高G作戦行動を行う可能性が低いと考えられることができる。さらなる例としては、ジャミング信号が検出された場合、作戦行動の発生の尤度の上昇が推測される可能性がある。したがって、高G作戦行動を表す目標ダイナミクスモデルのモデル確率は増加するが、一定速度運動を表す目標ダイナミクスモデルのモデル確率は減少するであろう。ベイジアンネットワーク構築により、すべてのこのような情報を効率的に結合でき、これによりモデル確率を直接的に更新することができる。従来の更新は(図2に示されているフローチャートに描かれているようなステップ211、212及び213を備える)ローカルデータの経路のために保持されるが、ベイジアンネットワーク構築は、(図2に示されているフローチャートのステップ221、222、及び223を備える)データ融合経路における観察イノベーションに基づく更新に取って代わる。
【0062】
本発明の該第1の実施形態による方法の実現がネットワークトポロジに制限を課さず、任意のネットワークにおいて完全に整合していることが留意される。したがって、第1の実施形態の追跡方法は任意のネットワークにおいて実現されるように適応可能である。
【0063】
本発明の第2の実施形態がここで説明される。第2の実施形態は、追跡情報が、複合目標状態推定値及び該複合目標状態推定値に関連付けられた共分散だけを備えるのではなく、モデル目標状態推定値及び該モデル目標状態推定値に関連付けられた共分散のそれぞれを備えるという点を除き、前述された第1の実施形態に非常に類似している。したがって、第2の実施形態によると、ノードのすべては同じ目標ダイナミクスモデルを使用してIMMアルゴリズムを実現しなければならない。局所的に生成されるデータは、第1の実施形態を参照して前述されたのと同じように扱われる。
【0064】
遠隔ノードからローカルノードへ、複合目標状態推定値だけでなく、個々のモデル目標状態推定値のすべての集合を通信することにより、ローカルノードがさらに大量のデータを送信するために必要とされる余分な帯域幅を犠牲にするが、さらに優れた解決策が達成できる。図2を参照し直すと、ステップ204で遠隔ノードから追跡情報を受け取ると、ローカルノードは、第1の実施形態に関して前述されたように、データ関連付けステップ221を実行してから、ステップ222において、受け取られたモデル目標状態推定値のそれぞれを、該推定値に対応する局所モデル目標状態推定値と融合するために共分散交差アルゴリズムを使用する。第2の実施形態のための共分散交差アルゴリズムの実現例は、第1の実施形態のための実現例に類似しているので、要約してのみ説明される。目標ダイナミクスモデルiごとの更新方程式は、以下のように書かれる。
【数18】
【0065】
ここで、Yiとyiはモデルiの局所情報状態であり、YAiとyAiは遠隔ノードから通信されるようなモデルiの情報状態である。第1の実施形態においてと同様に、ωは結果として生じる共分散行列の行列式または何か他の好都合なヒューリスティックを最小限に抑えるために選択される。該プロセスはモデルiごとに繰り返される。
【0066】
該モデル確率更新ステップ223は、各局所モデル確率が、遠隔ノードから通信され、該局所モデル確率に対応するモデル確率と融合されるような、保守的な融合プロセスを使用して実行することもできる。例えば、目標状態推定値について前述されたアルゴリズムに類似する共分散交差アルゴリズムが使用できる。ωという値は、該モデル確率分布から導出される任意のヒューリスティックであってよい。代わりに、ステップ222での状態更新のために使用されるωの値を使用することもでき、該モデル確率は該更新ステップの後に適切に正規化し直される。第1の実施形態に関して前述されるように、モデル確率を直接的に更新するためにベイジアンネットワーク構築を使用することも可能である。
【0067】
本発明の該第2の実施形態は、第1の実施形態の場合のように1つの複合推定値だけを通信するのでなく、i個の異なる状態推定値と、該推状態定値に関連付けられたモデル確率を通信することを必要とするため、第1の実施形態よりも多くの集中的な帯域幅(bandwidth intensive)を必要とする。本発明の第2の実施形態による方法の実現は、本発明の第1の実施形態の場合のように、ネットワークトポロジに制限を課さず、任意のネットワークにおいて完全に整合することが留意される。
【0068】
一連の試験が、関連するベンチマークに対して本発明の実施形態の性能を評価するために実行された。試験のシナリオには、8個の検知ノードの領域内を飛行する100個の目標航空機が含まれた。ノードは空間的に分離されており、これにより複数のセンサが各目標を見ることができた。しかしながら、どの時点においても、100個すべての目標を検出できたセンサはなかった。目標航空機は、7Gまでの作戦行動を含む軌跡を飛行した。
【0069】
これらの試験の該結果の例示的な選択が図3に描かれている。図3は、(1秒あたりに通信された追跡の数で測定された)ネットワーク帯域幅に対して、(メートルで測定された)追跡位置誤差の変動を描くグラフである。線310は、追跡選択システムを使用して達成された結果を描いている。このシステムでは、集中型プロセッサがすべての検知ノードから追跡情報を受け取り、最低の既知数(determinate)を有する共分散行列を有する追跡であるように選ばれる最良の追跡を単に選択する。このベンチマークは、該ベンチマークが現在使用されている多くのマルチセンサ追跡システムと同様であるために選ばれた。線320は、遠隔ノードからのデータを融合するために共分散交差アルゴリズムを使用し、及び各ノードで該目標を追跡するために単純なカルマンフィルタを使用する検知ノードの非集中型ネットワークの標準的な実現例を使用して達成される結果を描いている。線330は、本発明の実施形態による非集中型IMM処理を実現する検知ノードのネットワークを使用して達成される結果を描いている。IMMは3つの目標ダイナミクスモデルを使用する。使用されたモデルは本質的には同じであるが、異なるレベルの目標加速が異なるモデルによって対応できるように適切に修正されたパラメータを有するものであった。参照番号340とラベルが付けられた破線は、IMMアルゴリズムを使用するときの性能に対する下界を表し、ネットワークに存在するすべてのセンサから未処理センサデータを受け取る、集中型のIMMアルゴリズムを使用して達成される結果である。しかしながら、これはIMMアルゴリズムにとって最良の達成可能な結果を表す一方、IMMアルゴリズムは、ネットワーク全体で通信されなければならない非常に大量のデータ、及びこれに対応して高帯域幅が要求されるために実際には実現不可能である。
【0070】
各検知ノードが毎秒送信できる追跡の数―つまり、ネットワークが使用可能な帯域幅―が、試験パラメータの1つとして用いられた。これは、本発明の重要な優位点の1つが、低帯域幅通信を使用するように制限されても効率的に動作できる能力であるためである。図3に描かれている結果は、ネットワークが本発明の実施形態による該追跡方法を実現した場合に、すべての帯域幅でネットワークの性能が最良であることを実例で示すものである。いったんネットワーク帯域幅が毎秒100の追跡を超えて上昇すると、本発明の実施形態による追跡方法の性能は、事実上、(破線340によって示されている)下界に近づく。追跡選択アルゴリズムはすべての帯域幅で最悪であり、一方標準DDFアルゴリズムの性能は追跡選択アルゴリズムの性能と、本発明の実施形態による該追跡方法の性能の間の中間である。本発明の実施形態による追跡方法の性能が、試験された帯域幅の範囲全体で、かなりの余裕をもって最良であることに留意すべきである。
【0071】
多様な特殊実施形態に関して本発明を説明してきたが、これらの実施形態がすべての点において例示的であることが留意される。添付請求項に定められている本発明の範囲から逸脱することなく、変形及び改良が可能である。このような変形及び改良は当業者にとってただちに自明になるであろう。例えば、上記では、(図2に示されている)ステップ223において、個々のモデル確率を更新するために、遠隔ノードから受け取られる追跡情報、またはコンテキストデータが、使用できる、考えられる多様な方法が説明されているが、遠隔ノードから受け取られる追跡情報を用いず、局所的に生成されるセンサデータだけを用いてローカルノードでのモデル確率が更新されるように、(図2に示されている)ステップ212のみにおいて、モデル確率を更新することも可能であることが当業者に理解されるであろう。さらに、上記では、検知ノードだけを備えるネットワークが説明されてきたが、ネットワークは非検知ノードをさらに備えてもよいことが理解されるであろう。このような非検知ノードは、検知ノード間で追跡情報を中継する目的で使用されることができる。代わりに、このような非検知ノードはコマンド位置に備えられてもよく、この場合、該非検知ノードが追跡処理機器を備えることは有利であるが、センサに対する必要性はないであろう。ネットワークは複数のセンサを有するノードも備えてよい。
【0072】
最後に、任意の一実施形態に関して前述された任意の特徴は、単独で、もしくは説明された他の特徴と組み合わせて使用されてもよく、または、他の実施形態のいずれかの1つまたは複数の特徴と、もしくは他の実施形態の任意の組み合わせの1つまたは複数の特徴と組み合わせて使用されてもよいことが明確に理解されなければならないことが留意される。
【図面の簡単な説明】
【0073】
【図1】ノードの非集中型ネットワークの概略図である。
【図2】本発明の実施形態による追跡方法を描くフローチャートである。
【図3】多くの追跡方法に対するネットワーク帯域幅での追跡位置誤差の変化を描くグラフである。
【特許請求の範囲】
【請求項1】
目標を追跡する方法であって、前記方法は、各ノードが目標観察を行うように動作可能なセンサと、追跡情報を送信、受信するように動作可能な通信手段と、追跡情報を記憶するように動作可能な記憶手段とを備える、複数のノードを備える非集中型ネットワークに適用され、前記方法は、ローカルノードにおいて、
(i)目標ダイナミクスモデルの集合を提供するステップと、
(ii)初期モデル確率の集合を提供するステップであって、各初期モデル確率は目標ダイナミクスモデルの前記集合の1つと関連付けられ、各初期モデル確率は該初期モデル確率と関連付けられた目標ダイナミクスモデルが目標ダイナミクスと一致する確率に関連するものと、
(iii)初期モデル目標状態推定値の集合を提供するステップであって、各初期モデル目標状態推定値が目標ダイナミクスモデルの前記集合の1つと関連付けられているようなものと、
(iv)各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられた初期モデル目標状態推定値に適用することによって、予測されたモデル目標状態推定値の集合を計算するステップと、
(v)前記ローカルノードで行われている目標観察に応えて、第1の追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vi)遠隔ノードから前記ローカルノードで受け取られる追跡情報に応えて、第2の目標追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vii)前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
を実行することを備え、
前記第1の追跡手順は、
(a)前記目標観察と前記予測されたモデル目標状態推定値との間の差異に依存して、更新されたモデル確率を計算するステップと、
(b)前記予測されたモデル目標状態推定値及び前記目標観察に依存して更新されたモデル目標状態推定値を計算するステップと、
(c)前記更新されたモデル確率に関連する重み付けを使用して前記予測されたモデル目標状態推定値を結合することによって複合予測目標状態推定値を計算するステップと、
を備え、
前記第2の追跡手順は、融合された追跡情報を生成するために、前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップを備え、前記追跡情報は、前記更新された複合目標状態推定値、前記更新されたモデル目標状態推定値、及び前記更新されたモデル確率の1つまたは複数を備える、方法。
【請求項2】
前記ネットワークの各ノードで請求項1に記載のステップ(i)から(vii)を繰り返すステップと、次に、前記初期モデル確率及び前記初期モデル目標状態推定値の代りに、直前の反復から前記更新されたモデル確率、及び前記更新されたモデル目標状態推定値を使用することによって前記ネットワーク内の各ノードで請求項1に記載のステップ(iv)から(vii)を反復するステップと、をさらに備える請求項1に記載の方法。
【請求項3】
第1の初期モデル目標状態推定値に、他の初期モデル目標状態推定値のそれぞれの割合を結合することにより、初期モデル目標状態推定値を混合するステップであって、該割合は、直前の反復中に、前記目標ダイナミクスが該他の初期モデル目標状態推定値に関連付けられた目標ダイナミクスモデルと一致する状態から、該第1の初期モデル目標状態推定値と関連付けられた目標ダイナミクスモデルと一致する状態に遷移する確率に関連するものであるものと、初期モデル目標状態推定値ごとに前記結合手順を繰り返すステップとをさらに備える、請求項1または請求項2に記載の方法。
【請求項4】
前記第1の追跡手順は、前記目標観察を、前記ローカルノードに記憶されている前記追跡情報と関連付けるステップをさらに備える、請求項1乃至請求項3のいずれか1項に記載の方法。
【請求項5】
前記第2の追跡手順は、前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と関連付けるステップをさらに備える、請求項1乃至請求項4のいずれか1項に記載の方法。
【請求項6】
前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と保守的に融合する前記ステップは、共分散交差アルゴリズムを適用することを備える、請求項1乃至請求項5のいずれか1項に記載の方法。
【請求項7】
前記追跡情報は、前記更新された複合目標状態推定値を備える、請求項1乃至請求項6のいずれか1項に記載の方法。
【請求項8】
前記複数のノードは少なくとも第1のノードと第2のノードを備え、前記第1のノードにおいて提供される目標ダイナミクスモデルの集合は、前記第2のノードにおいて提供される目標ダイナミクスモデルの集合と異なる、請求項7に記載の方法。
【請求項9】
前記追跡情報は、前記更新されたモデル目標状態推定値及び前記更新されたモデル確率を備える、請求項1乃至請求項6のいずれか1項に記載の方法。
【請求項10】
前記ネットワーク内の各ノードに、同じ集合の目標ダイナミクスモデルが提供される、請求項9に記載の方法。
【請求項11】
前記第2の追跡手順は、ベイジアンネットワークの適用によって前記初期モデル確率を更新するステップを備える、請求項1乃至請求項10のいずれか1項に記載の方法。
【請求項12】
前記第2の追跡手順は、受け取られた、更新されたモデル目標状態推定値のそれぞれを、該更新されたモデル目標状態推定値に対応する局所モデル目標状態推定値と保守的に融合することと、受け取られた、更新されたモデル確率のそれぞれを該更新されたモデル確率のそれぞれに対応する局所的な確率と保守的に融合することとを備える、請求項10に記載の方法。
【請求項13】
目標を追跡する方法であって、前記方法は複数のノードを備える非集中型ネットワークに適用され、前記方法は、
(i)第1のノードが複数のモデル追跡アルゴリズムを実行し、それによって該第1のノードに記憶されている追跡情報を更新するステップと、
(ii)前記第1のノードは、前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
(iii)前記第1のノードは、別のノードから追跡情報を受け取ることに応えて、前記受け取る追跡情報を局所的な追跡情報と保守的に融合するステップと、
(iv)前記ネットワーク内の各ノードでステップ(i)から(iii)を繰り返すステップと、
を備える、方法。
【請求項14】
前記複数のモデル追跡アルゴリズムは、相互作用複数モデル追跡アルゴリズムである、請求項13に記載の方法。
【請求項15】
添付図に関して本明細書に実質的に説明されているように目標を追跡する方法。
【請求項16】
請求項1乃至請求項15のいずれか1項に記載の方法を実行するように適応されるノードの非集中型ネットワーク。
【請求項17】
実行されるときに、請求項1乃至請求項15のいずれか1項に記載の方法を実施するように動作可能なコンピュータプログラム。
【請求項1】
目標を追跡する方法であって、前記方法は、各ノードが目標観察を行うように動作可能なセンサと、追跡情報を送信、受信するように動作可能な通信手段と、追跡情報を記憶するように動作可能な記憶手段とを備える、複数のノードを備える非集中型ネットワークに適用され、前記方法は、ローカルノードにおいて、
(i)目標ダイナミクスモデルの集合を提供するステップと、
(ii)初期モデル確率の集合を提供するステップであって、各初期モデル確率は目標ダイナミクスモデルの前記集合の1つと関連付けられ、各初期モデル確率は該初期モデル確率と関連付けられた目標ダイナミクスモデルが目標ダイナミクスと一致する確率に関連するものと、
(iii)初期モデル目標状態推定値の集合を提供するステップであって、各初期モデル目標状態推定値が目標ダイナミクスモデルの前記集合の1つと関連付けられているようなものと、
(iv)各目標ダイナミクスモデルを、該目標ダイナミクスモデルに関連付けられた初期モデル目標状態推定値に適用することによって、予測されたモデル目標状態推定値の集合を計算するステップと、
(v)前記ローカルノードで行われている目標観察に応えて、第1の追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vi)遠隔ノードから前記ローカルノードで受け取られる追跡情報に応えて、第2の目標追跡手順を実行し、それによって該ローカルノードに記憶されている追跡情報を更新するステップと、
(vii)前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
を実行することを備え、
前記第1の追跡手順は、
(a)前記目標観察と前記予測されたモデル目標状態推定値との間の差異に依存して、更新されたモデル確率を計算するステップと、
(b)前記予測されたモデル目標状態推定値及び前記目標観察に依存して更新されたモデル目標状態推定値を計算するステップと、
(c)前記更新されたモデル確率に関連する重み付けを使用して前記予測されたモデル目標状態推定値を結合することによって複合予測目標状態推定値を計算するステップと、
を備え、
前記第2の追跡手順は、融合された追跡情報を生成するために、前記受け取られた追跡情報を前記ローカルノードに記憶されている追跡情報と保守的に融合するステップを備え、前記追跡情報は、前記更新された複合目標状態推定値、前記更新されたモデル目標状態推定値、及び前記更新されたモデル確率の1つまたは複数を備える、方法。
【請求項2】
前記ネットワークの各ノードで請求項1に記載のステップ(i)から(vii)を繰り返すステップと、次に、前記初期モデル確率及び前記初期モデル目標状態推定値の代りに、直前の反復から前記更新されたモデル確率、及び前記更新されたモデル目標状態推定値を使用することによって前記ネットワーク内の各ノードで請求項1に記載のステップ(iv)から(vii)を反復するステップと、をさらに備える請求項1に記載の方法。
【請求項3】
第1の初期モデル目標状態推定値に、他の初期モデル目標状態推定値のそれぞれの割合を結合することにより、初期モデル目標状態推定値を混合するステップであって、該割合は、直前の反復中に、前記目標ダイナミクスが該他の初期モデル目標状態推定値に関連付けられた目標ダイナミクスモデルと一致する状態から、該第1の初期モデル目標状態推定値と関連付けられた目標ダイナミクスモデルと一致する状態に遷移する確率に関連するものであるものと、初期モデル目標状態推定値ごとに前記結合手順を繰り返すステップとをさらに備える、請求項1または請求項2に記載の方法。
【請求項4】
前記第1の追跡手順は、前記目標観察を、前記ローカルノードに記憶されている前記追跡情報と関連付けるステップをさらに備える、請求項1乃至請求項3のいずれか1項に記載の方法。
【請求項5】
前記第2の追跡手順は、前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と関連付けるステップをさらに備える、請求項1乃至請求項4のいずれか1項に記載の方法。
【請求項6】
前記受け取られた追跡情報を、前記ローカルノードに記憶されている追跡情報と保守的に融合する前記ステップは、共分散交差アルゴリズムを適用することを備える、請求項1乃至請求項5のいずれか1項に記載の方法。
【請求項7】
前記追跡情報は、前記更新された複合目標状態推定値を備える、請求項1乃至請求項6のいずれか1項に記載の方法。
【請求項8】
前記複数のノードは少なくとも第1のノードと第2のノードを備え、前記第1のノードにおいて提供される目標ダイナミクスモデルの集合は、前記第2のノードにおいて提供される目標ダイナミクスモデルの集合と異なる、請求項7に記載の方法。
【請求項9】
前記追跡情報は、前記更新されたモデル目標状態推定値及び前記更新されたモデル確率を備える、請求項1乃至請求項6のいずれか1項に記載の方法。
【請求項10】
前記ネットワーク内の各ノードに、同じ集合の目標ダイナミクスモデルが提供される、請求項9に記載の方法。
【請求項11】
前記第2の追跡手順は、ベイジアンネットワークの適用によって前記初期モデル確率を更新するステップを備える、請求項1乃至請求項10のいずれか1項に記載の方法。
【請求項12】
前記第2の追跡手順は、受け取られた、更新されたモデル目標状態推定値のそれぞれを、該更新されたモデル目標状態推定値に対応する局所モデル目標状態推定値と保守的に融合することと、受け取られた、更新されたモデル確率のそれぞれを該更新されたモデル確率のそれぞれに対応する局所的な確率と保守的に融合することとを備える、請求項10に記載の方法。
【請求項13】
目標を追跡する方法であって、前記方法は複数のノードを備える非集中型ネットワークに適用され、前記方法は、
(i)第1のノードが複数のモデル追跡アルゴリズムを実行し、それによって該第1のノードに記憶されている追跡情報を更新するステップと、
(ii)前記第1のノードは、前記ネットワーク内の選択された他のノードに更新された追跡情報を通信するステップと、
(iii)前記第1のノードは、別のノードから追跡情報を受け取ることに応えて、前記受け取る追跡情報を局所的な追跡情報と保守的に融合するステップと、
(iv)前記ネットワーク内の各ノードでステップ(i)から(iii)を繰り返すステップと、
を備える、方法。
【請求項14】
前記複数のモデル追跡アルゴリズムは、相互作用複数モデル追跡アルゴリズムである、請求項13に記載の方法。
【請求項15】
添付図に関して本明細書に実質的に説明されているように目標を追跡する方法。
【請求項16】
請求項1乃至請求項15のいずれか1項に記載の方法を実行するように適応されるノードの非集中型ネットワーク。
【請求項17】
実行されるときに、請求項1乃至請求項15のいずれか1項に記載の方法を実施するように動作可能なコンピュータプログラム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2008−538141(P2008−538141A)
【公表日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2008−520967(P2008−520967)
【出願日】平成19年6月8日(2007.6.8)
【国際出願番号】PCT/GB2007/002093
【国際公開番号】WO2007/144570
【国際公開日】平成19年12月21日(2007.12.21)
【出願人】(390038014)ビ−エイイ− システムズ パブリック リミテッド カンパニ− (74)
【氏名又は名称原語表記】BAE SYSTEMS plc
【Fターム(参考)】
【公表日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年6月8日(2007.6.8)
【国際出願番号】PCT/GB2007/002093
【国際公開番号】WO2007/144570
【国際公開日】平成19年12月21日(2007.12.21)
【出願人】(390038014)ビ−エイイ− システムズ パブリック リミテッド カンパニ− (74)
【氏名又は名称原語表記】BAE SYSTEMS plc
【Fターム(参考)】
[ Back to top ]