
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法
【課題】装置規模の縮小、処理時間の短縮を実現する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標の角度を観測する複数のN次元角度センサの情報を統合し、距離情報を算出・追加した目標の(N+1)次元航跡の生成・維持を行う目標追跡システムとこのシステムに用いられる角度追跡装置及び目標追跡装置とそれらのプログラム及び方法に関する。
【背景技術】
【0002】
目標追跡システムにあっては、2個の2次元角度センサの情報を統合し、2目標の追跡を行う場合に、2次元航跡の4通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定する処理が提案されている。さらに、n個の2次元角度センサの情報を統合し、m目標の追跡を行う場合に、2次元航跡の(n・(n−1)/2)・m2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定することも検討されている。
【0003】
しかしながら、上記のような従来の目標追跡システムでは、2次元角度センサ数nや目標数mが増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加することになるため、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴って装置規模や処理時間が増大してしまうという課題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−142325号公報
【非特許文献】
【0005】
【非特許文献1】系 正義,辻道信吾,小菅義夫,"拡張カルマンフィルタを用いた複数パッシブセンサによる3次元運動目標の追尾,"電子情報通信学会論文誌B,vol.J82-B, no.5, pp.1063-1072, May 1999
【非特許文献2】系 正義,辻道信吾,小菅義夫,"2次元角度センサ間の目標相関方式,"電子情報通信学会論文誌B2,vol.J81-B2, no.2, pp.162-168, Feb. 1998
【非特許文献3】S.S.Blackman, "Association and fusion of multiple sensor data," Multitarget-Multisensor Tracking Advanced Applications, Artech House, 1990
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上述べたように、目標追跡装置では、2次元角度センサ数や目標数が増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加するため、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴って装置規模や処理時間が増大してしまうという課題がある。
【0007】
本実施形態は前記のような課題に鑑みなされたもので、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴う装置規模や処理時間の増大を抑制し、装置規模の縮小、処理時間の短縮を実現することのできる目標追跡システムとこのシステムに用いられる角度追跡装置及び目標追跡装置とそれらのプログラム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本実施形態によれば、複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する場合に、前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いてN次元予測値に対応して維持されている(N+1)次元航跡を更新するようにしている。
【図面の簡単な説明】
【0009】
【図1】本実施形態に係る目標追跡システムの構成を示すブロック図。
【図2】図1に示す目標追跡装置の処理の流れを示すフローチャート。
【図3】本実施形態に係る目標追跡システムの変形例を示すブロック図。
【発明を実施するための形態】
【0010】
以下、図面を参照して本実施形態に係る目標追跡システムを説明する。
【0011】
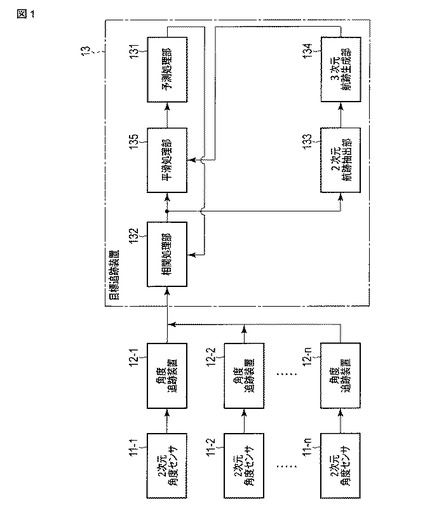
図1は本実施形態に係る目標追跡システムの構成を示すブロック図である。この目標追跡システムは、それぞれ目標の2次元角度を観測するn個の2次元角度センサ11−1〜11−nと、各2次元角度センサ11−1〜11−nで得られる2次元角度観測値(以下、単に2次元観測値と称する)からそれぞれの目標の2次元航跡を算出することで目標毎の角度追跡を行うn個の角度追跡装置12−1〜12−nと、各角度追跡装置12−1〜12−nで得られる目標毎の角度追跡情報から目標毎の3次元航跡を生成・維持することで各目標を追跡する目標追跡装置13とを備える。
【0012】
ここで、上記角度追跡装置12−1〜12−nは、2次元角度センサ11−1〜11−nからの2次元観測値とその観測値を用いて算出した2次元航跡を対にして、角度追跡情報として目標追跡装置13へ出力するペアリング機能を備える。
【0013】
上記構成による目標追跡システムにおいて、目標追跡装置13は、上記角度追跡装置12−1〜12−nで得られた角度追跡情報(2次元観測値と2次元航跡)を入力し、距離情報を算出・追加して3次元航跡を生成・維持するもので、具体的には、予測処理部131、相関処理部132、2次元航跡抽出部133、3次元航跡生成部134及び平滑処理部135から構成される。
【0014】
予測処理部131は、角度追跡装置12−1〜12−nから2次元観測値が入力された時点で、維持している3次元航跡から2次元予測値を算出する。
【0015】
相関処理部132は、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との相関の有無を判定する。
【0016】
2次元航跡抽出部133は、相関処理部132において2次元予測値と2次元観測値との間に相関がないと判定された場合に、相関がないと判定された2次元観測値の対となる2次元航跡を抽出する。
【0017】
3次元航跡生成部134は、2次元航跡抽出部133で抽出された2次元航跡に基づいて3次元航跡を生成する。
【0018】
平滑処理部135は、相関処理部132において2次元予測値と2次元観測値との間に相関があると判定された場合に、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
【0019】
本実施形態の構成における目標追跡装置13の処理内容について、ここでは拡張カルマンフィルタを用いた場合を例にして簡単に説明する。尚、目標毎に、以下の処理が実施されるが、ここでは、説明が繁雑になるため各目標を区別する記号は用いないものとする。
【0020】
まず、拡張カルマンフィルタでは、以下の運動モデルと観測モデルを用いる。
【数1】

【0021】
ここで、x(k)は観測時刻tkにおける目標の状態ベクトル、F(k)とG(k)はそれぞれ観測時刻tk−1からtkにおける遷移行列と駆動行列、w(k−1)は観測時刻tk−1における平均0、共分散行列Q(k−1)の正規分布に従うシステム雑音ベクトル、y(k,i)は、観測時刻tkにおける角度センサSiの観測ベクトル、h(・)は観測関数、v(k,i)は、観測時刻tkにおける平均0、共分散行列R(k,i)の正規分布に従う観測雑音ベクトルである。
【0022】
予測処理部131は以下の式に示す値を算出する。
【数2】
【0023】
ここで、x(k|k−1)とP(k|k−1)はそれぞれ観測時刻tkにおける予測ベクトルと予測誤差共分散行列、x(k−1|k−1)とP(k−1|k−1)は観測時刻tk−1における平滑ベクトルと平滑誤差共分散行列、y(k|k−1,i)は観測時刻tkにおける角度センサSiの予測位置ベクトルである。また、ATはベクトルまたは行列Aの転置を示す。なお、平滑ベクトルx(k−1|k−1)は維持している3次元航跡に対応し、予測位置ベクトルy(k|k−1,i)は2次元予測値に対応する。
【0024】
尚、上記の説明において「3次元航跡」とは、3次元空間における航跡であることを意味しており、「平滑ベクトル…3次元航跡に対応し」との記載において、平滑ベクトルの次数(次元と呼ばれることもある)は、速度成分や加速度成分を加えて、3より大きくすることができるのは勿論である。
【0025】
上記相関処理部132は、相関処理として以下の式に示す値を算出する。
【数3】
【0026】
ここで、S(k)とd(k)は観測時刻tkにおける残差共分散行列とマハラノビス距離である。また、A−1は行列Aの逆行列を示す。マハラノビス距離(又はマハラノビス二乗距離)が基準値よりも小さい場合、相関があると判定され、平滑処理部135は平滑処理として以下の式に示す値を算出する。
【数4】
【0027】
ここで、K(k)は観測時刻tkにおけるカルマンゲイン行列、x(k|k)とP(k|k)はそれぞれ観測時刻tkにおける平滑ベクトルと平滑誤差共分散行列である。また、Iは単位行列を示す。
【0028】
また、相関処理部132における相関処理の結果として、マハラノビス距離(又はマハラノビス二乗距離)が基準値よりも大きい場合には相関がないと判定される。このとき、2次元航跡抽出部133は、相関がないと判定された2次元観測値の対となる2次元航跡を抽出して、3次元航跡生成部134に出力する。
【0029】
続いて、図2(a)を参照して、本実施形態の目標追跡装置13の処理の流れを説明する。
【0030】
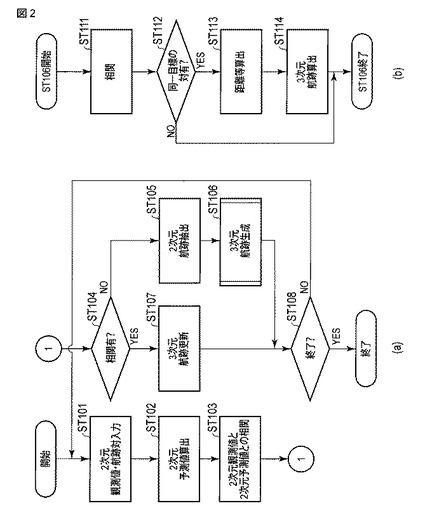
目標追跡装置13では、角度追跡装置12−1〜12−nから2次元観測値と2次元航跡の対が入力されると(ST101)、予測処理部131により、維持している3次元航跡から2次元予測値を算出する(ST102)。次に、相関処理部132により、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との相関をとり(ST103)、両者の相関の有無を判定する(ST104)。
【0031】
ST104の結果、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との間に相関がないと判定された場合(ST104のN)、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出する(ST105)。次に、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する(ST106)。
【0032】
一方、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との間に相関があると判定された場合(ST104のY)、平滑処理部135により相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する(ST107)。この後は、動作終了が指示されるまで、上記したST101からの動作ステップを繰り返す(ST108)。
【0033】
続いて、図2(b)を参照して、ST106の3次元航跡生成処理の流れを説明する。
【0034】
3次元航跡生成部134は、2次元航跡抽出部133で抽出した異なる角度追跡装置12−1〜12−nからの2次元航跡に基づいて2次元航跡の組み合わせを作成し、2次元航跡の組み合わせが、同一目標に対する2次元航跡の組みあわせであるか否かを判定する相関処理を実施する(ST111)。ST111の判定の結果、同一目標に対する2次元航跡の組み合わせが見つかった場合(ST112のY)、同一目標に対する2次元航跡の組み合わせを用いて、距離や距離変化率の算出が行われる(ST113)。ST113で距離や距離変化率が算出されると、2次元航跡に前記距離や距離変化率を組み合わせて3次元航跡を算出し(ST114)、ST106の処理を終了する。また、ST112において、同一目標に対する2次元航跡の組み合わせが見つからなかった場合には、そのままST106の処理を終了する。
【0035】
以上の3次元航跡生成処理では、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡を用いることを除き、特許文献1や非特許文献1〜3に記載の目標追跡装置と同じ処理を実施することができる。
【0036】
すなわち、上記文献記載の目標追跡装置では、n個の2次元角度センサの情報を統合し、m目標の追跡を行う場合、2次元航跡の(n・(n−1)/2)・m2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定する必要があり、2次元角度センサ数nや目標数mが増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加していた。
【0037】
これに対して、本実施形態の目標追跡装置13では、n個の2次元角度センサ11−1〜11−nの情報を統合し、m目標の追跡を行う場合、目標数mと維持している航跡(目標)数との差分をΔmとすると、2次元航跡の(n・(n−1)/2)・(Δm)2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定するだけで済むため、2次元航跡の組み合わせ数を大幅に削減することができる。また、目標数mが変化しない状況では、Δmは最終的に0となり、m目標の3次元航跡を生成・維持する場合でも、2次元航跡の組み合わせ数を0にすることができる。この結果、本実施形態では、目標追跡装置の装置規模を小さくすることや、処理時間を短縮することができる。
【0038】
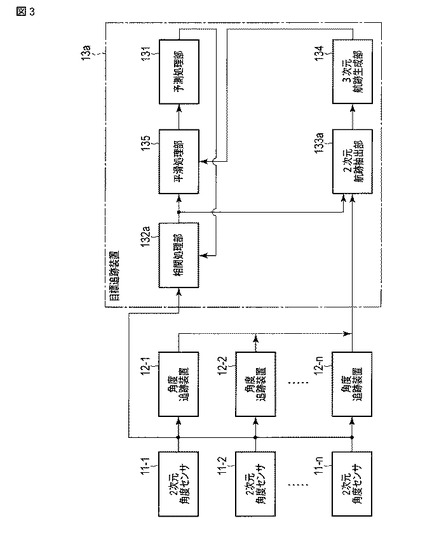
尚、上記の実施形態では、角度追跡装置12−1〜12−nにおいて2次元角度センサ11−1〜11−nからの2次元観測値とその観測値から算出した2次元航跡を対にして目標追跡装置13に入力するように構成したが、図3に示すように目標追跡装置13aを変形しても実施可能である。以下の図3の説明において、図1と同一部分には同一符号を付して示し、ここでは異なる部分について説明する。
【0039】
すなわち、目標追跡装置13aでは、2次元角度センサ11−1〜11−nからの2次元観測値を直接、相関処理部132aに入力し、2次元観測値との対応情報を付加した角度追跡装置12−1〜12−nからの2次元航跡を直接、2次元航跡抽出部133aに入力するように構成することもできる。この場合、相関処理部132aは、2次元航跡と対をなしていない2次元角度センサ11−1〜11−nからの2次元観測値のみを入力するように変形され、2次元航跡抽出部133aは、相関処理部132aにおける2次元観測値の相関判定の結果と、角度追跡装置12−1〜12−nからの2次元観測値との対応情報を付加した2次元航跡に基づいて、2次元航跡を抽出するように変形される。
【0040】
したがって、上記のように変形された目標追跡装置13aでも、図1に示した実施形態と同様に、2次元航跡の組み合わせ数を大幅に削減することができ、装置規模を小さくすることや、処理時間を短縮することができる。
【0041】
また、上記実施形態において、角度追跡装置12−1〜12−nは、2次元角度センサ11−1〜11−nのそれぞれに対応させるように構成したが、角度追跡装置12は、複数(2個からn個)の2次元角度センサに対応させるように構成することができる。
【0042】
尚、上記実施形態において、目標の角度を観測する複数のN(Nは1または2)次元角度センサ11−1〜11−nとして、画像センサ、ソナー装置、パッシブ・レーダ装置等が利用可能であり、これらの情報を統合し、目標の(N+1)次元航跡の生成・維持を行う目標追跡装置に適用可能である。
【0043】
また、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0044】
11−1〜11−n…2次元角度センサ、12−1〜12−n…角度追跡装置、13,13a…目標追跡装置、131…予測処理部、132,132a…相関処理部、133,133a…2次元航跡抽出部、134…3次元航跡生成部、135…平滑処理部。
【技術分野】
【0001】
本発明は、目標の角度を観測する複数のN次元角度センサの情報を統合し、距離情報を算出・追加した目標の(N+1)次元航跡の生成・維持を行う目標追跡システムとこのシステムに用いられる角度追跡装置及び目標追跡装置とそれらのプログラム及び方法に関する。
【背景技術】
【0002】
目標追跡システムにあっては、2個の2次元角度センサの情報を統合し、2目標の追跡を行う場合に、2次元航跡の4通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定する処理が提案されている。さらに、n個の2次元角度センサの情報を統合し、m目標の追跡を行う場合に、2次元航跡の(n・(n−1)/2)・m2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定することも検討されている。
【0003】
しかしながら、上記のような従来の目標追跡システムでは、2次元角度センサ数nや目標数mが増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加することになるため、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴って装置規模や処理時間が増大してしまうという課題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−142325号公報
【非特許文献】
【0005】
【非特許文献1】系 正義,辻道信吾,小菅義夫,"拡張カルマンフィルタを用いた複数パッシブセンサによる3次元運動目標の追尾,"電子情報通信学会論文誌B,vol.J82-B, no.5, pp.1063-1072, May 1999
【非特許文献2】系 正義,辻道信吾,小菅義夫,"2次元角度センサ間の目標相関方式,"電子情報通信学会論文誌B2,vol.J81-B2, no.2, pp.162-168, Feb. 1998
【非特許文献3】S.S.Blackman, "Association and fusion of multiple sensor data," Multitarget-Multisensor Tracking Advanced Applications, Artech House, 1990
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上述べたように、目標追跡装置では、2次元角度センサ数や目標数が増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加するため、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴って装置規模や処理時間が増大してしまうという課題がある。
【0007】
本実施形態は前記のような課題に鑑みなされたもので、精度向上のための2次元角度センサ数増大や目標数増大の要求に伴う装置規模や処理時間の増大を抑制し、装置規模の縮小、処理時間の短縮を実現することのできる目標追跡システムとこのシステムに用いられる角度追跡装置及び目標追跡装置とそれらのプログラム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本実施形態によれば、複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する場合に、前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いてN次元予測値に対応して維持されている(N+1)次元航跡を更新するようにしている。
【図面の簡単な説明】
【0009】
【図1】本実施形態に係る目標追跡システムの構成を示すブロック図。
【図2】図1に示す目標追跡装置の処理の流れを示すフローチャート。
【図3】本実施形態に係る目標追跡システムの変形例を示すブロック図。
【発明を実施するための形態】
【0010】
以下、図面を参照して本実施形態に係る目標追跡システムを説明する。
【0011】
図1は本実施形態に係る目標追跡システムの構成を示すブロック図である。この目標追跡システムは、それぞれ目標の2次元角度を観測するn個の2次元角度センサ11−1〜11−nと、各2次元角度センサ11−1〜11−nで得られる2次元角度観測値(以下、単に2次元観測値と称する)からそれぞれの目標の2次元航跡を算出することで目標毎の角度追跡を行うn個の角度追跡装置12−1〜12−nと、各角度追跡装置12−1〜12−nで得られる目標毎の角度追跡情報から目標毎の3次元航跡を生成・維持することで各目標を追跡する目標追跡装置13とを備える。
【0012】
ここで、上記角度追跡装置12−1〜12−nは、2次元角度センサ11−1〜11−nからの2次元観測値とその観測値を用いて算出した2次元航跡を対にして、角度追跡情報として目標追跡装置13へ出力するペアリング機能を備える。
【0013】
上記構成による目標追跡システムにおいて、目標追跡装置13は、上記角度追跡装置12−1〜12−nで得られた角度追跡情報(2次元観測値と2次元航跡)を入力し、距離情報を算出・追加して3次元航跡を生成・維持するもので、具体的には、予測処理部131、相関処理部132、2次元航跡抽出部133、3次元航跡生成部134及び平滑処理部135から構成される。
【0014】
予測処理部131は、角度追跡装置12−1〜12−nから2次元観測値が入力された時点で、維持している3次元航跡から2次元予測値を算出する。
【0015】
相関処理部132は、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との相関の有無を判定する。
【0016】
2次元航跡抽出部133は、相関処理部132において2次元予測値と2次元観測値との間に相関がないと判定された場合に、相関がないと判定された2次元観測値の対となる2次元航跡を抽出する。
【0017】
3次元航跡生成部134は、2次元航跡抽出部133で抽出された2次元航跡に基づいて3次元航跡を生成する。
【0018】
平滑処理部135は、相関処理部132において2次元予測値と2次元観測値との間に相関があると判定された場合に、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
【0019】
本実施形態の構成における目標追跡装置13の処理内容について、ここでは拡張カルマンフィルタを用いた場合を例にして簡単に説明する。尚、目標毎に、以下の処理が実施されるが、ここでは、説明が繁雑になるため各目標を区別する記号は用いないものとする。
【0020】
まず、拡張カルマンフィルタでは、以下の運動モデルと観測モデルを用いる。
【数1】
【0021】
ここで、x(k)は観測時刻tkにおける目標の状態ベクトル、F(k)とG(k)はそれぞれ観測時刻tk−1からtkにおける遷移行列と駆動行列、w(k−1)は観測時刻tk−1における平均0、共分散行列Q(k−1)の正規分布に従うシステム雑音ベクトル、y(k,i)は、観測時刻tkにおける角度センサSiの観測ベクトル、h(・)は観測関数、v(k,i)は、観測時刻tkにおける平均0、共分散行列R(k,i)の正規分布に従う観測雑音ベクトルである。
【0022】
予測処理部131は以下の式に示す値を算出する。
【数2】
【0023】
ここで、x(k|k−1)とP(k|k−1)はそれぞれ観測時刻tkにおける予測ベクトルと予測誤差共分散行列、x(k−1|k−1)とP(k−1|k−1)は観測時刻tk−1における平滑ベクトルと平滑誤差共分散行列、y(k|k−1,i)は観測時刻tkにおける角度センサSiの予測位置ベクトルである。また、ATはベクトルまたは行列Aの転置を示す。なお、平滑ベクトルx(k−1|k−1)は維持している3次元航跡に対応し、予測位置ベクトルy(k|k−1,i)は2次元予測値に対応する。
【0024】
尚、上記の説明において「3次元航跡」とは、3次元空間における航跡であることを意味しており、「平滑ベクトル…3次元航跡に対応し」との記載において、平滑ベクトルの次数(次元と呼ばれることもある)は、速度成分や加速度成分を加えて、3より大きくすることができるのは勿論である。
【0025】
上記相関処理部132は、相関処理として以下の式に示す値を算出する。
【数3】
【0026】
ここで、S(k)とd(k)は観測時刻tkにおける残差共分散行列とマハラノビス距離である。また、A−1は行列Aの逆行列を示す。マハラノビス距離(又はマハラノビス二乗距離)が基準値よりも小さい場合、相関があると判定され、平滑処理部135は平滑処理として以下の式に示す値を算出する。
【数4】
【0027】
ここで、K(k)は観測時刻tkにおけるカルマンゲイン行列、x(k|k)とP(k|k)はそれぞれ観測時刻tkにおける平滑ベクトルと平滑誤差共分散行列である。また、Iは単位行列を示す。
【0028】
また、相関処理部132における相関処理の結果として、マハラノビス距離(又はマハラノビス二乗距離)が基準値よりも大きい場合には相関がないと判定される。このとき、2次元航跡抽出部133は、相関がないと判定された2次元観測値の対となる2次元航跡を抽出して、3次元航跡生成部134に出力する。
【0029】
続いて、図2(a)を参照して、本実施形態の目標追跡装置13の処理の流れを説明する。
【0030】
目標追跡装置13では、角度追跡装置12−1〜12−nから2次元観測値と2次元航跡の対が入力されると(ST101)、予測処理部131により、維持している3次元航跡から2次元予測値を算出する(ST102)。次に、相関処理部132により、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との相関をとり(ST103)、両者の相関の有無を判定する(ST104)。
【0031】
ST104の結果、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との間に相関がないと判定された場合(ST104のN)、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出する(ST105)。次に、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する(ST106)。
【0032】
一方、予測処理部131からの2次元予測値と角度追跡装置12−1〜12−nからの2次元観測値との間に相関があると判定された場合(ST104のY)、平滑処理部135により相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する(ST107)。この後は、動作終了が指示されるまで、上記したST101からの動作ステップを繰り返す(ST108)。
【0033】
続いて、図2(b)を参照して、ST106の3次元航跡生成処理の流れを説明する。
【0034】
3次元航跡生成部134は、2次元航跡抽出部133で抽出した異なる角度追跡装置12−1〜12−nからの2次元航跡に基づいて2次元航跡の組み合わせを作成し、2次元航跡の組み合わせが、同一目標に対する2次元航跡の組みあわせであるか否かを判定する相関処理を実施する(ST111)。ST111の判定の結果、同一目標に対する2次元航跡の組み合わせが見つかった場合(ST112のY)、同一目標に対する2次元航跡の組み合わせを用いて、距離や距離変化率の算出が行われる(ST113)。ST113で距離や距離変化率が算出されると、2次元航跡に前記距離や距離変化率を組み合わせて3次元航跡を算出し(ST114)、ST106の処理を終了する。また、ST112において、同一目標に対する2次元航跡の組み合わせが見つからなかった場合には、そのままST106の処理を終了する。
【0035】
以上の3次元航跡生成処理では、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡を用いることを除き、特許文献1や非特許文献1〜3に記載の目標追跡装置と同じ処理を実施することができる。
【0036】
すなわち、上記文献記載の目標追跡装置では、n個の2次元角度センサの情報を統合し、m目標の追跡を行う場合、2次元航跡の(n・(n−1)/2)・m2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定する必要があり、2次元角度センサ数nや目標数mが増加するにつれて、2次元航跡の組み合わせ数が概ね2乗の関係で増加していた。
【0037】
これに対して、本実施形態の目標追跡装置13では、n個の2次元角度センサ11−1〜11−nの情報を統合し、m目標の追跡を行う場合、目標数mと維持している航跡(目標)数との差分をΔmとすると、2次元航跡の(n・(n−1)/2)・(Δm)2通りの組み合わせの中から、どの2次元航跡の組み合わせが同一目標のものであるかを判定するだけで済むため、2次元航跡の組み合わせ数を大幅に削減することができる。また、目標数mが変化しない状況では、Δmは最終的に0となり、m目標の3次元航跡を生成・維持する場合でも、2次元航跡の組み合わせ数を0にすることができる。この結果、本実施形態では、目標追跡装置の装置規模を小さくすることや、処理時間を短縮することができる。
【0038】
尚、上記の実施形態では、角度追跡装置12−1〜12−nにおいて2次元角度センサ11−1〜11−nからの2次元観測値とその観測値から算出した2次元航跡を対にして目標追跡装置13に入力するように構成したが、図3に示すように目標追跡装置13aを変形しても実施可能である。以下の図3の説明において、図1と同一部分には同一符号を付して示し、ここでは異なる部分について説明する。
【0039】
すなわち、目標追跡装置13aでは、2次元角度センサ11−1〜11−nからの2次元観測値を直接、相関処理部132aに入力し、2次元観測値との対応情報を付加した角度追跡装置12−1〜12−nからの2次元航跡を直接、2次元航跡抽出部133aに入力するように構成することもできる。この場合、相関処理部132aは、2次元航跡と対をなしていない2次元角度センサ11−1〜11−nからの2次元観測値のみを入力するように変形され、2次元航跡抽出部133aは、相関処理部132aにおける2次元観測値の相関判定の結果と、角度追跡装置12−1〜12−nからの2次元観測値との対応情報を付加した2次元航跡に基づいて、2次元航跡を抽出するように変形される。
【0040】
したがって、上記のように変形された目標追跡装置13aでも、図1に示した実施形態と同様に、2次元航跡の組み合わせ数を大幅に削減することができ、装置規模を小さくすることや、処理時間を短縮することができる。
【0041】
また、上記実施形態において、角度追跡装置12−1〜12−nは、2次元角度センサ11−1〜11−nのそれぞれに対応させるように構成したが、角度追跡装置12は、複数(2個からn個)の2次元角度センサに対応させるように構成することができる。
【0042】
尚、上記実施形態において、目標の角度を観測する複数のN(Nは1または2)次元角度センサ11−1〜11−nとして、画像センサ、ソナー装置、パッシブ・レーダ装置等が利用可能であり、これらの情報を統合し、目標の(N+1)次元航跡の生成・維持を行う目標追跡装置に適用可能である。
【0043】
また、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0044】
11−1〜11−n…2次元角度センサ、12−1〜12−n…角度追跡装置、13,13a…目標追跡装置、131…予測処理部、132,132a…相関処理部、133,133a…2次元航跡抽出部、134…3次元航跡生成部、135…平滑処理部。
【特許請求の範囲】
【請求項1】
目標を観測してN(Nは1または2)次元角度観測値を得る複数のN次元角度センサと、
前記複数のN次元角度センサに対応して設けられ、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出する角度追跡装置と、
複数のN次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理手段と、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出手段と、
前記予測値算出手段で得られる目標毎のN次元予測値と前記目標毎のN次元角度観測値との相関の有無を判定する相関判定手段とを具備し、
前記(N+1)次元航跡処理手段は、
前記相関判定手段により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定手段により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡システム。
【請求項2】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理をコンピュータに実行させる目標追跡プログラムであって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出処理と、
前記予測値算出処理で得られる目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定する相関判定処理とを具備し、
前記(N+1)次元航跡処理は、
前記相関判定処理により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成する生成処理と、
前記相関判定処理により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新する更新処理とを備えることを特徴とする目標追跡プログラム。
【請求項3】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する目標追跡方法であって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、
前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、
前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡方法。
【請求項4】
請求項1記載の目標追跡システムに用いられる角度追跡装置であって、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出する算出手段と、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力するペアリング手段と
を備えることを特徴とする角度追跡装置。
【請求項5】
請求項2記載の目標追跡プログラムにおけるN次元航跡算出処理として用いられ、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出する算出処理と、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力するペアリング処理と
を備えることを特徴とする角度追跡プログラム。
【請求項6】
請求項3記載の目標追跡方法におけるN次元航跡の算出に用いられ、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出し、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力することを特徴とする角度追跡方法。
【請求項7】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理手段と、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出手段と、
前記予測値算出手段で得られる目標毎のN次元予測値と前記目標毎のN次元角度観測値との相関の有無を判定する相関判定手段とを具備し、
前記(N+1)次元航跡処理手段は、
前記相関判定手段により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定手段により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡装置。
【請求項8】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理をコンピュータに実行させる目標追跡プログラムであって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出処理と、
前記予測値算出処理で得られる目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定する相関判定処理とを具備し、
前記(N+1)次元航跡処理は、
前記相関判定処理により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を算出する生成処理と、
前記相関判定処理により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新する更新処理とを備えることを特徴とする目標追跡プログラム。
【請求項9】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する目標追跡方法であって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、
前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、
前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡方法。
【請求項1】
目標を観測してN(Nは1または2)次元角度観測値を得る複数のN次元角度センサと、
前記複数のN次元角度センサに対応して設けられ、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出する角度追跡装置と、
複数のN次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理手段と、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出手段と、
前記予測値算出手段で得られる目標毎のN次元予測値と前記目標毎のN次元角度観測値との相関の有無を判定する相関判定手段とを具備し、
前記(N+1)次元航跡処理手段は、
前記相関判定手段により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定手段により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡システム。
【請求項2】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理をコンピュータに実行させる目標追跡プログラムであって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出処理と、
前記予測値算出処理で得られる目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定する相関判定処理とを具備し、
前記(N+1)次元航跡処理は、
前記相関判定処理により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成する生成処理と、
前記相関判定処理により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新する更新処理とを備えることを特徴とする目標追跡プログラム。
【請求項3】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値を入力し、前記センサで得られる目標毎のN次元角度観測値から角度追跡により前記目標毎のN次元航跡を算出すると共に、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する目標追跡方法であって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、
前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、
前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡方法。
【請求項4】
請求項1記載の目標追跡システムに用いられる角度追跡装置であって、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出する算出手段と、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力するペアリング手段と
を備えることを特徴とする角度追跡装置。
【請求項5】
請求項2記載の目標追跡プログラムにおけるN次元航跡算出処理として用いられ、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出する算出処理と、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力するペアリング処理と
を備えることを特徴とする角度追跡プログラム。
【請求項6】
請求項3記載の目標追跡方法におけるN次元航跡の算出に用いられ、
前記N次元角度センサからの目標のN次元角度観測値を入力し、このN次元角度観測値から角度追跡によりN次元航跡を算出し、
前記入力された目標のN次元角度観測値と当該観測値から算出されたN次元航跡を対にして出力することを特徴とする角度追跡方法。
【請求項7】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理手段と、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出手段と、
前記予測値算出手段で得られる目標毎のN次元予測値と前記目標毎のN次元角度観測値との相関の有無を判定する相関判定手段とを具備し、
前記(N+1)次元航跡処理手段は、
前記相関判定手段により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定手段により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡装置。
【請求項8】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する(N+1)次元航跡処理をコンピュータに実行させる目標追跡プログラムであって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出する予測値算出処理と、
前記予測値算出処理で得られる目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定する相関判定処理とを具備し、
前記(N+1)次元航跡処理は、
前記相関判定処理により相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を算出する生成処理と、
前記相関判定処理により相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新する更新処理とを備えることを特徴とする目標追跡プログラム。
【請求項9】
複数のN(Nは1または2)次元角度センサでそれぞれ観測される目標毎のN次元角度観測値と、前記目標毎のN次元角度観測値から算出される前記目標毎のN次元航跡とを入力し、距離情報を算出・追加して前記目標毎の(N+1)次元航跡を生成し維持する目標追跡方法であって、
前記維持している目標毎の(N+1)次元航跡からそれぞれのN次元予測値を算出し、
前記目標毎のN次元予測値と前記目標毎に入力されるN次元角度観測値との相関の有無を判定し、
前記相関判定で相関がないと判定された場合に、前記相関がないと判定されたN次元角度観測値に対応するN次元航跡に基づいて新たな目標の(N+1)次元航跡を生成し、
前記相関判定で相関があると判定された場合に、前記相関があると判定されたN次元角度観測値を用いて前記N次元予測値に対応して維持されている(N+1)次元航跡を更新し維持することを特徴とする目標追跡方法。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−47656(P2013−47656A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−186578(P2011−186578)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]