
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、目標の角度を測定するパッシブセンサを用いて、目標の追跡を行なう目標追跡装置に関し、特に等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させる技術に関する。
【背景技術】
【0002】
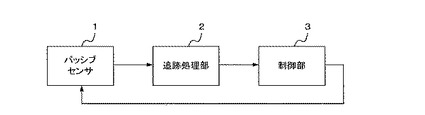
図8は、従来の目標追跡装置の構成の一例を示すブロック図である。この目標追跡装置は、パッシブセンサ1、追跡処理部2および制御部3を備えている。パッシブセンサ1は、目標から放射(再放射を含む)される電磁波または音波の角度、換言すれば、目標の角度を測定し、測角データとして追跡処理部2に送る。追跡処理部2は、パッシブセンサ1からの測角データに基づいて、予測値および平滑値を算出し、目標航跡として制御部3に送る。追跡処理部2の詳細は後述する。制御部3は、追跡処理部2からの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0003】
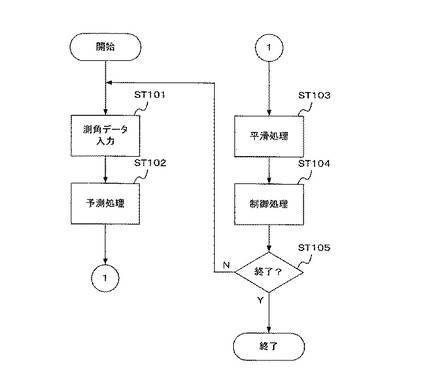
次に、上記のように構成された従来の目標追跡装置の動作を説明する。図9は、従来の目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【0004】
目標追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて目標の観測を行い、目標の測角データを算出して追跡処理部2に送る。追跡処理部2は、パッシブセンサ1から送られてくる測角データを入力する。次いで、予測処理が実行される(ST102)。すなわち、追跡処理部2は、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列に基づいて、目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST103)。すなわち、追跡処理部2は、パッシブセンサ1からの目標の測角データと、ステップST102において算出された目標の予測値およびその共分散行列に基づいて、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0005】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2からの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0006】
次に、追跡処理部2の処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。なお、以下において、バーxは「x(−)」と表記する。
【数1】

【数2】
【数3】
【数4】
【数5】
【0007】
ここで、x(−)kは、観測時刻tkにおける方位角ak、高低角ekおよびそれらの速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのプロセス雑音ベクトル、σhkとσvkは、観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0008】
パッシブセンサ1の観測モデルを以下のように定義する。
【数6】
【数7】
【数8】
【0009】
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σakとσekは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
【0010】
上述したステップST101では、パッシブセンサ1からの測角データを観測ベクトルykとして入力する。
【0011】
上述したステップST102においては、前回観測時の平滑処理の結果を用いて、以下の式で表される予測処理が実施される。なお、以下において、ハットxは「x(^)」と表記する。
【数9】
【数10】
【数11】
【0012】
ここで、x(^)k|k−1とPk|k−1は、観測時刻tkの予測ベクトルと予測誤差共分散行列であり、x(^)k−1|k−1とPk−1|k−1は、観測時刻tk−1の平滑ベクトルと平滑誤差共分散行列である。なお、プロセス雑音共分散行列Qk−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
【0013】
上述したステップST103においては、パッシブセンサ1からの観測ベクトルと予測処理の結果を用いて、以下の式で表される平滑処理が実施される。なお、以下において、チルダyは「y(〜)」と表記する。
【数12】
【数13】
【数14】
【数15】
【数16】
【0014】
ここで、y(〜)kは、観測時刻tkのパッシブセンサ1の残差ベクトル、Skは、観測時刻tkのパッシブセンサ1の残差共分散行列、Kkは、観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)k|kとPk|kは、観測時刻tkの平滑ベクトルと平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0015】
以上説明したように、パッシブセンサ1の追跡処理では、パッシブセンサ1から目標までの距離情報が得られないため、プロセス雑音共分散行列Qk−1に誤差が発生する。この結果、この値から間接的に算出され、航跡算出に用いられるフィルタゲイン(カルマンゲイン行列)も、最適値が算出されず航跡誤差が大きくなる。また、非特許文献1に示すように、直交座標系で等速直線運動を行なっている目標に対しても、極座標系では、角加速度や角加速度の微分成分が発生するが、測角データからこの成分を推定して、プロセス雑音共分散行列Qk−1に反映させることは難しく、航跡誤差が大きくなる。
【0016】
そこで本願出願人は、特願2009−198342号により、この問題の解決を行うための提案を行った。この特願2009−198342号によれば、外部から入力される目標の状態ベクトルに基づいて、パッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出し、パッシブセンサからの測角データと補正情報とに基づいて、該パッシブセンサを中心とする座標系における目標の航跡を算出することによって、目標の追跡精度を向上させる技術が開示されている。これにより、特に等速直線運動を行う目標に対する追跡性能を向上させることができる。
【0017】
なお、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させる技術として、複数の運動モデルを並列動作させるIMM(Interacting Multiple Model)フィルタが、非特許文献3等に開示されているが、一般的に、多くの運動モデルが3次元直交座標系の運動として定義してあるために、目標の3次元情報が得られるアクティブセンサの処理に適用できるものの、2次元極座標系等で目標航跡の推定を行なう追跡処理部2に適用することは難しい。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開平7−128436号公報
【特許文献2】特開2009−38777号公報
【特許文献3】特開2002−181926号公報
【非特許文献】
【0019】
【非特許文献1】D. Howard, "Tracking Radar," in Radar Handbook, 2nd ed., ch.18, ed. M. Skolnik, McGraw-Hill, New York, 1990.
【非特許文献2】吉田孝監修,改訂 レーダ技術,pp.264-267,電子情報通信学会, 1996.
【非特許文献3】Y. Bar-Shalom, X. R. Li, T. Kirubarajan, "Estimation with Applications to Tracking and Navigation", Wiley-Interscience, 2001
【非特許文献4】系 正義,辻道信吾,小菅義夫,"拡張カルマンフィルタを用いた複数パッシブセンサによる3次元運動目標の追尾",電子情報通信学会論文誌B,vol.J82B, no.5, pp.1063-1072, May 1999
【非特許文献5】S.Blackman, "Association and fusion of multiple sensor data", Multitarget-multisensor Tracking Advanced Applications, Chapter6, Artech House, 1990
【発明の概要】
【発明が解決しようとする課題】
【0020】
上述したように、パッシブセンサを用いた目標追跡装置では、一般的には、パッシブセンサ1から目標までの距離情報が得られないため、航跡算出に用いられるフィルタゲインも、最適値が算出されず航跡誤差が大きくなる。また、同じ理由により、パッシブセンサを中心とするローカル座標系で目標を追跡することになるが、例えばローカル座標系として極座標系を用いる場合、目標が直交座標系で等速直線運動を行なっていても、極座標系では角加速度、角加速度の微分成分が発生する。これに対応しようとして、非特許文献2に示すように、フィルタゲインを大きくすると、航跡誤差のランダム成分が大きくなり、航跡誤差のランダム成分を小さくしようとしてフィルタゲインを小さくすると、航跡誤差のバイアス成分が大きくなるため、追跡性能を向上させることが難しいという問題がある。
【0021】
また、本願出願人が特願2009−198342号に開示した技術は上述したように優れた技術であるが、単一の運動モデルを前提としているために、等速直線運動を行う目標に最適化すると、等速直線以外の運動を行う目標に対する追跡性能が劣化し、等速直線以外の運動を行う目標に最適化すると、等速直線運動を行う目標に対する追跡性能が劣化して、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができないという問題がある。
【0022】
なお、特許文献1には、パッシブセンサとアクティブセンサを組み合わせ、パッシブセンサとアクティブセンサからの情報に基づいて、アクティブセンサを制御する低被探知性センサ装置が開示され、特許文献2には、パッシブセンサとしてカメラを用い、カメラのパン・チルト制御を制御ベクトルとして考慮する自動追尾装置が開示されている。
【0023】
本発明の課題は、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができる目標追跡装置を提供することにある。
【課題を解決するための手段】
【0024】
上記課題を解決するために、本実施形態の目標追跡装置は、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離を算出することと、前記追跡処理部は、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列に基づいて、目標の航跡を算出することとを特徴とする。
【0025】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、前記追跡処理部は、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率に基づいて、目標の航跡を算出することとを特徴とする。
【0026】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出し、算出した複数の運動モデルに対応する予測値に基づいて、目標の航跡を算出することとを特徴とする。
【0027】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離を算出することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応する予測値とプロセス雑音共分散行列に基づいて、目標の航跡を算出することとを特徴とする。
【0028】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、これら複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応する予測値、プロセス雑音共分散行列および運動モデル確率に基づいて、目標の航跡を算出することを特徴とする。
【図面の簡単な説明】
【0029】
【図1】第1の実施形態に係る目標追跡装置の構成を示すブロック図である。
【図2】第1の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図3】第2の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図4】第3の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図5】第4の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図6】第5の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図7】第1の実施形態〜第5の実施形態の変形例に係る目標追跡装置の構成を示すブロック図である。
【図8】従来の目標追跡装置の構成の一例を示すブロック図である。
【図9】従来の目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図10】第6の実施形態に係る目標追跡装置の構成を示すブロック図である。
【発明を実施するための形態】
【0030】
以下、本実施形態の目標追跡装置を、図面を参照しながら詳細に説明する。なお、以下においては、背景技術の欄で説明した構成部分と同一または相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0031】
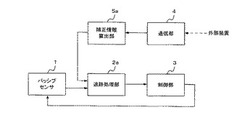
図1は、第1の実施形態に係る目標追跡装置の構成を示すブロック図である。この目標追跡装置は、パッシブセンサ1、追跡処理部2a、制御部3、通信部4および補正情報算出部5aを備えている。
【0032】
パッシブセンサ1は、目標の角度を測定し、測角データとして追跡処理部2aに送る。通信部4は、外部装置から入力される目標の状態ベクトルを補正情報算出部5aに送る。補正情報算出部5aは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)を算出し、追跡処理部2aに送る。
【0033】
追跡処理部2aは、パッシブセンサ1からの測角データと補正情報算出部5aからの補正情報(目標距離)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。制御部3は、追跡処理部2aからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0034】
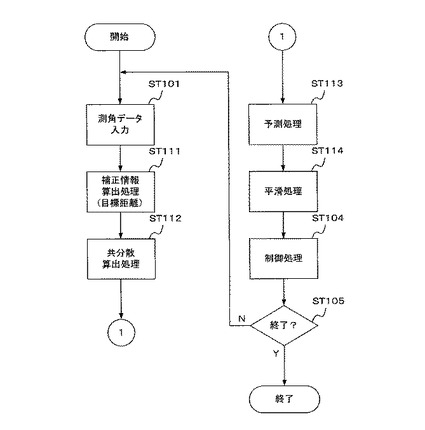
次に、上記のように構成される第1の実施形態に係る目標追跡装置の動作を説明する。図2は、第1の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、従来の目標追跡装置の目標追跡処理と同じ処理を行うステップには、従来の目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0035】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2aに送る。追跡処理部2aは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5aは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2aに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2aは、補正情報算出部5aからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0036】
次いで、予測処理が実行される(ST113)。すなわち、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列とステップST112において算出された複数の運動モデルに対応するプロセス雑音共分散行列とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2aは、パッシブセンサ1からの目標の測角データとステップST113において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0037】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2aからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0038】
次に、補正情報算出部5aと追跡処理部2aの処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
【数17】
【数18】
【数19】
【数20】
【数21】
【0039】
ここで、xikは、i番目の運動モデルに対応する観測時刻tkにおける方位角aik、高低角eikとそれらの速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wikは、i番目の運動モデルに対応する観測時刻tkの平均0、i番目の運動モデルに対応する共分散行列Qikのプロセス雑音ベクトル、σh,ikとσv,ikは、i番目の運動モデルに対応する観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0040】
パッシブセンサ1の観測モデルを以下のように定義する。
【数22】
【数23】
【数24】
【0041】
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、xtkは、観測時刻tkの真の状態ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σakとσekは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
【0042】
上述したステップST101では、パッシブセンサ1からの測角データを観測ベクトルykとして入力する。
【0043】
上述したステップST111では、外部装置から入力される目標の状態ベクトルに基づいて、補正情報として、目標距離r(^)k−1を算出する。
【数25】
【0044】
ここで、xk−1、yk−1、zk−1は、観測時刻tk−1の目標の状態ベクトルの位置のx、y、z成分、x0、y0、z0は、パッシブセンサ1の位置のx、y、z成分である。
【0045】
なお、外部装置としては、アクティブセンサであるレーダ装置等を使用できる。また、パッシブセンサ1と、略同位置に置かれた測距装置を用いて、目標距離を直接測定するように構成することができる。
【0046】
上述したステップST112では、補正情報算出部5aからの補正情報(目標距離)に基づいて、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を算出する。
【数26】
【0047】
上述したステップST113では、前回観測時の平滑処理の結果とステップST112の(26)式のi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、以下の式で表される予測処理を実施する。
【数27】
【数28】
【0048】
ここで、x(^)ik|k−1とPik|k−1は、i番目の運動モデルに対応する観測時刻tkの予測ベクトルと予測誤差共分散行列であり、x(^)ik−1|k−1とPik−1|k−1は、i番目の運動モデルに対応する観測時刻tk−1の平滑ベクトルと平滑誤差共分散行列である。
【0049】
上述したステップST114では、パッシブセンサ1からの観測ベクトルと予測処理の結果を用いて、以下の式で表される平滑処理を実施する。
【数29】
【数30】
【数31】
【数32】
【数33】
【数34】
【数35】
【数36】
【0050】
ここで、y(〜)ikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1の残差ベクトル、Sikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1の残差共分散行列、Kikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)ik|kとPik|kは、i番目の運動モデルに対応する観測時刻tkの平滑ベクトルと平滑誤差共分散行列、pikは、i番目の運動モデルに対応する観測時刻tkの運動モデル確率、likは、i番目の運動モデルに対応する観測時刻tkの運動モデル尤度、x(^)k|kとPk|kは、複数の運動モデルを加重平均した観測時刻tkの平滑ベクトルと平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0051】
以上説明したように、第1の実施形態に係る目標追跡装置によれば、補正情報算出部5aは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離)を追跡処理部2aに送り、追跡処理部2aは、補正情報算出部5aからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、この値から間接的に算出されるフィルタゲイン(カルマンゲイン行列)を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。
【0052】
なお、上記では、目標の運動モデルとして、等速運動モデルを用いたが、等加速度運動モデル等の他の運動モデルと組み合わせることができる。また、上記では、追跡処理部2aで実施する処理として、非特許文献3等に開示されているIMMフィルタの処理を簡略化して示しているが、IMMフィルタの処理を適用できるのは、勿論である。
【0053】
なお、上記では、追跡処理部2aの目標の状態ベクトルとして、極座標系を用いた例を示したが、特許文献2に示されているように、カメラの画像上の目標の位置等(水平、垂直座標とその速度)を用いるように構成することができる。
【0054】
また、上述した第1の実施形態に係る目標追跡装置では、補正情報算出部5aは補正情報として目標距離を算出し、追跡処理部2aは、この補正情報(目標距離)に基づいて複数の運動モデルに対応するプロセス雑音共分散行列を算出するように構成したが、補正情報算出部5aは補正情報として複数の運動モデルに対応するプロセス雑音共分散行列を算出し、追跡処理部2aは、この補正情報(複数の運動モデルに対応するプロセス雑音共分散行列)に基づいてフィルタゲインを算出するように構成することができる。
【実施例2】
【0055】
第2の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5bおよび追跡処理部2b(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0056】
補正情報算出部5bは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)と目標のプロセス雑音共分散行列を算出し、追跡処理部2bに送る。追跡処理部2bは、パッシブセンサ1からの測角データと補正情報算出部5bからの補正情報(目標距離とプロセス雑音共分散行列)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0057】
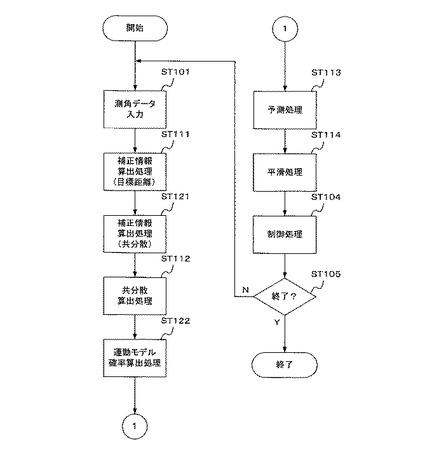
次に、上記のように構成される第2の実施形態に係る目標追跡装置の動作を説明する。図3は、第2の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0058】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2bに送る。追跡処理部2bは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2bに送る。
【0059】
次いで、補正情報算出処理(共分散)が実行される(ST121)。すなわち、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標のプロセス雑音共分散行列を算出し、補正情報(プロセス雑音共分散行列)として追跡処理部2bに送る。なお、外部装置としては、目標のプロセス雑音共分散行列を推定できる、例えば特許文献3等に記載のアダプティブカルマンフィルタや非特許文献3等に記載のIMMフィルタを備えたレーダ装置等を使用できる。
【0060】
次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2bは、補正情報算出部5bからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。次いで、運動モデル確率算出処理が実行される(ST122)。すなわち、追跡処理部2bは、補正情報算出部5bからの補正情報(プロセス雑音共分散行列)に基づいて、複数の運動モデルに対応する運動モデル確率を算出する。次いで、予測処理が実行される(ST113)。すなわち、追跡処理部2bは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列とステップST112において算出された複数の運動モデルに対応するプロセス雑音共分散行列とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。
【0061】
次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2bは、パッシブセンサ1からの目標の測角データとステップST113において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2bからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0062】
次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0063】
次に、補正情報算出部5bと追跡処理部2bの処理内容について、詳細に説明する。目標の運動モデルとパッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101とステップST111の処理内容も、第1の実施形態と同じであるので説明を省略する。
【0064】
上述したステップST121では、外部装置から入力される目標の状態ベクトル(プロセス雑音共分散行列Qak−1を含む)に基づいて、補正情報として、パッシブセンサ1から見たプロセス雑音共分散行列Qk−1を算出する。
【数37】
【0065】
ここで、外部装置から入力されるプロセス雑音共分散行列Qak−1が以下の(38)式で表されるとすると、変換行列Tk−1は、(39)式のようになる。なお、(xk−1、yk−1、zk−1)、(ak−1、ek−1)は、座標変換によって、外部装置から入力される目標の状態ベクトルをパッシブセンサ1から見た目標の位置ベクトル(直交座標系と極座標系)に変換した値である。
【数38】
【数39】
【0066】
上述したステップST112の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0067】
上述したステップST122では、ステップST121で算出したプロセス雑音共分散行列Qk−1とステップST112で算出したi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、(40)式を満足するi番目の運動モデルに対応する運動モデル確率pik−1を算出する。
【数40】
【0068】
なお、定義(設定)した運動モデルが実際の運動モデルと厳密に当てはまらない場合、モデル化の誤差成分を加味して、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を補正するように構成することができる。
【0069】
上述したステップST113の処理内容は、実施例1と同じであるので説明を省略する。上述したステップST114では、前回観測時の平滑処理(ステップST114)の(34)式の代わりに、ST122の(40)式で算出したi番目の運動モデルに対応する運動モデル確率pik−1を用いて、平滑処理を実施する。
【0070】
上述したステップST104とステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0071】
以上説明したように、第2の実施形態に係る目標追跡装置によれば、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離とプロセス雑音共分散行列)を追跡処理部2bに送り、追跡処理部2bは、補正情報(目標距離)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。また、追跡処理部2bは、補正情報(プロセス雑音共分散行列)から間接的に算出される複数の運動モデルに対応する運動モデル確率を航跡算出に用いるので、観測回数が少ない追跡初期段階や、前回観測以降に目標の運動モデルが変化した場合でも、航跡誤差を小さくすることができる。
【実施例3】
【0072】
第3の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5cおよび追跡処理部2c(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0073】
補正情報算出部5cは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは(17)式で定義(設定)した極座標系の等速運動モデルが直交座標系の等速運動モデルと厳密に当てはまらないことにより発生する目標の角加速度を制御入力ベクトルとみなして算出し、追跡処理部2cに送る。追跡処理部2cは、パッシブセンサ1からの測角データと補正情報算出部5cからの補正情報(制御入力ベクトル)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0074】
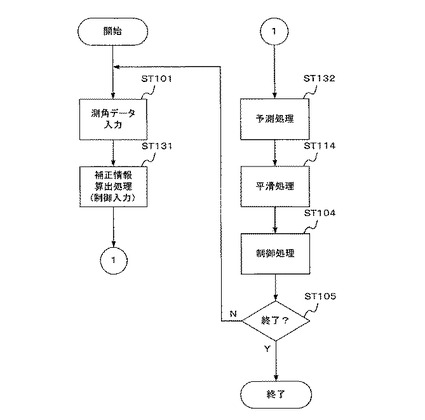
次に、上記のように構成される第3の実施形態に係る目標追跡装置の動作を説明する。図4は、第3の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1または第2の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1または第2の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0075】
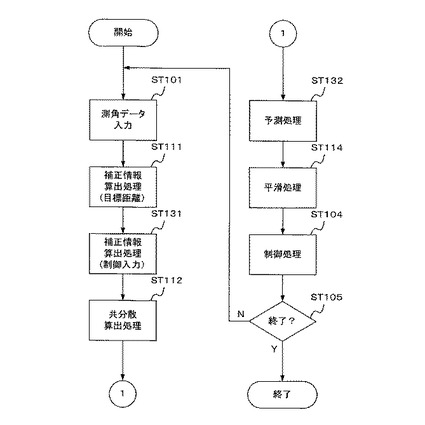
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2cに送る。追跡処理部2cは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5cは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2cに送る。
【0076】
次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2cは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5cからの補正情報(制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2cは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0077】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2cからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0078】
次に、補正情報算出部5cと追跡処理部2cの処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
【数41】
【数42】
【数43】
【数44】
【数45】
【数46】
【0079】
ここで、xikは、i番目の運動モデルに対応する観測時刻tkにおける方位角aik、高低角eikとそれらの速度成分からなる状態ベクトル、ukは、観測時刻tkにおける方位角ak、高低角ekの加速度成分からなる制御入力ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wikは、i番目の運動モデルに対応する観測時刻tkの平均0、i番目の運動モデルに対応する共分散行列Qikのプロセス雑音ベクトル、σh,ikとσv,ikは、i番目の運動モデルに対応する観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0080】
パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101の処理内容も、第1の実施形態と同じであるので説明を省略する。上述したステップST131では、外部装置から入力される目標の状態ベクトルに基づいて、補正情報として、制御入力ベクトル(角加速度)uk−1を算出する。
【数47】
【0081】
なお、制御入力ベクトル(角加速度)uk−1は、以下の式で算出する。
【数48】
【0082】
ここで、(xk−1、yk−1、zk−1)、(x(・)k−1、y(・)k−1、z(・)k−1)、(a(・)k−1、e(・)k−1)は、座標変換によって、外部装置から入力される目標の状態ベクトルをパッシブセンサ1から見た目標の位置ベクトル、速度ベクトルおよび角速度ベクトルに変換した値である。
【0083】
上述したステップST132では、前回観測時の平滑処理の結果と制御入力ベクトルuk−1を用いて、以下の式で表される予測処理を実施する。
【数49】
【数50】
【数51】
【0084】
なお、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
【0085】
上述したステップST114、ステップST104およびステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0086】
以上説明したように、第3の実施形態に係る目標追跡装置によれば、補正情報算出部5cは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(制御入力ベクトル)を追跡処理部2cに送り、追跡処理部2cは、補正情報算出部5cからの補正情報(制御入力ベクトル)から間接的に算出される複数の運動モデルに対応する予測値を航跡算出に用いるので、等速直線運動を行う目標と等速直線以外の運動を行う目標に対し、航跡誤差(バイアス成分)を小さくすることができる。
【0087】
なお、上記では、目標の運動モデルとして、等速運動モデルを用いたが、等加速度運動モデル等の他の運動モデルと組み合わせることができる。また、制御入力ベクトルuk−1は、運動モデルによらず一定としたが、運動モデル毎に異なる値や微分次数(角加加速度等)を取るように構成することができる。さらに、上記では、追跡処理部2cで実施する処理として、非特許文献3等に開示されているIMMフィルタの処理を簡略化して示しているが、IMMフィルタの処理を適用できるのは、勿論である。
【実施例4】
【0088】
第4の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5dおよび追跡処理部2d(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0089】
補正情報算出部5dは、通信部4から送られてくる目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)と制御入力ベクトルを算出し、追跡処理部2dに送る。追跡処理部2dは、パッシブセンサ1からの測角データと補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)に基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0090】
次に、上記のように構成される第4の実施形態に係る目標追跡装置の動作を説明する。図5は、第4の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態〜第3の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態〜第3の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0091】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2dに送る。追跡処理部2dは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2dに送る。
【0092】
次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2dに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2dは、補正情報算出部5dからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0093】
次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2dは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。
【0094】
次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2dは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0095】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2dからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0096】
次に、補正情報算出部5dと追跡処理部2dの処理内容について、詳細に説明する。目標の運動モデルは、第3の実施形態と同じであるので説明を省略する。また、パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101、ステップST111およびステップST112の処理内容は、第1の実施形態と同じであり、上述したステップST131の処理内容は、第3の実施形態と同じであるので説明を省略する。
【0097】
上述したステップST132では、(51)式の代わりに、ステップST112の(26)式のi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、予測処理を実施する。上述したステップST114、ステップST104およびステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0098】
以上説明したように、第4の実施形態に係る目標追跡装置によれば、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離と制御入力ベクトル)を追跡処理部2dに送り、追跡処理部2dは、補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)と予測値を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分とバイアス成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。
【実施例5】
【0099】
第5の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5eおよび追跡処理部2e(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0100】
補正情報算出部5eは、通信部4から送られてくる目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)、目標のプロセス雑音共分散行列および制御入力ベクトルを算出し、追跡処理部2eに送る。追跡処理部2eは、パッシブセンサ1からの測角データと補正情報算出部5eからの補正情報(目標距離、プロセス雑音共分散行列および制御入力ベクトル)に基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0101】
次に、上記のように構成される第5の実施形態に係る目標追跡装置の動作を説明する。図6は、第5の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態〜第4の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態〜第4の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0102】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2eに送る。追跡処理部2eは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2eに送る。
【0103】
次いで、補正情報算出処理(共分散)が実行される(ST121)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標のプロセス雑音共分散行列を算出し、補正情報(プロセス雑音共分散行列)として追跡処理部2eに送る。なお、外部装置としては、目標のプロセス雑音共分散行列を推定できるアダプティブカルマンフィルタやIMMフィルタを備えたレーダ装置等を使用できる。
【0104】
次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2eに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2eは、補正情報算出部5eからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0105】
次いで、運動モデル確率算出処理が実行される(ST122)。すなわち、追跡処理部2eは、補正情報算出部5eからの補正情報(プロセス雑音共分散行列)に基づいて、複数の運動モデルに対応する運動モデル確率を算出する。次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2eは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5eからの補正情報(目標距離と制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2eは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0106】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2eからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0107】
次に、補正情報算出部5eと追跡処理部2eの処理内容について、詳細に説明する。目標の運動モデルは、第3の実施形態と同じであるので説明を省略する。また、パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101、ステップST111およびステップST112の処理内容は、第1の実施形態と同じであり、上述したステップST121とステップST122の処理内容は、第2の実施形態と同じであり、上述したステップST131とステップST132の処理内容は、第3の実施形態と同じであるので説明を省略する。
【0108】
上述したステップST114では、前回観測時の平滑処理(ステップST114)の(34)式の代わりに、ステップST122の(40)式で算出したi番目の運動モデルに対応する運動モデル確率pik−1を用いて、平滑処理を実施する。
【0109】
上述したステップST104とステップST105の処理内容は、第1の実施例と同じであるので説明を省略する。
【0110】
以上説明したように、第5の実施形態に係る目標追跡装置によれば、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離、プロセス雑音共分散行列および制御入力ベクトル)を追跡処理部2eに送り、追跡処理部2eは、補正情報算出部5eからの補正情報(目標距離と制御入力ベクトル)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)と予測値を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分とバイアス成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。また、追跡処理部2eは、補正情報(プロセス雑音共分散行列)から間接的に算出される複数の運動モデルに対応する運動モデル確率を航跡算出に用いるので、等速直線運動を行う目標と等速直線以外の運動を行う目標に対し、観測回数が少ない追跡初期段階や、前回観測以降に目標の運動モデルが変化した場合でも、航跡誤差を小さくすることができる。
【0111】
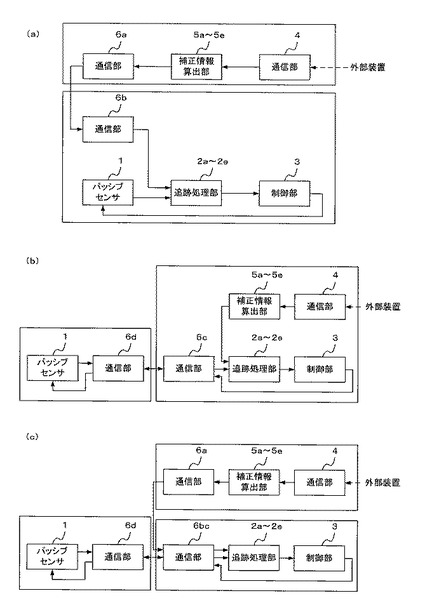
(変形例)上述した第1の実施形態〜第5の実施形態に係る目標追跡装置は、図7に示すように変形することができる。図7(a)は、補正情報算出部5a〜5eと追跡処理部2a〜2eとの間に通信部6aおよび通信部6bを設け、補正情報算出部5a〜5eを含むブロックと追跡処理部2a〜2eを含むブロックとを別体に構成したものである。
【0112】
図7(b)は、追跡処理部2a〜2eとパッシブセンサ1との間に通信部6cおよび通信部6dを設け、パッシブセンサ1を含むブロックと追跡処理部2a〜2eを含むブロックとを別体に構成したものである。
【0113】
図7(c)は、補正情報算出部5a〜5eと追跡処理部2a〜2eとの間に通信部6aおよび通信部6bcを設けるとともに、通信部6bcとパッシブセンサ1との間に通信部6dを設け、補正情報算出部5a〜5eを含むブロック、パッシブセンサ1を含むブロックおよび追跡処理部2a〜2eを含むブロックの各々を別体に構成したものである。これらの変形例のいずれにおいても、第1の実施形態〜第5の実施形態において記載した効果と同様の効果を得ることができる。
【実施例6】
【0114】
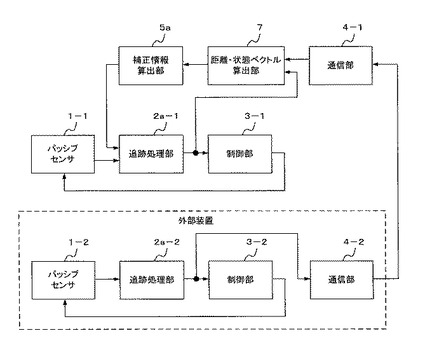
図10は、第6の実施形態に係る目標追跡装置の構成の一例を示すブロック図である。この第6の実施形態について、図1に示した第1の実施形態の各部と同一の部分は同一の符号で示し、その説明を省略する。この第6の実施形態が第1の実施形態と異なる点は、外部装置から入力される目標に関する情報について、第1の実施形態においては、外部装置から位置情報を含む目標の状態ベクトルが入力される。すなわち、外部装置としてレーダ装置や測距装置等のアクティブセンサを用いて取得した情報が入力されるのに対して、この第6の実施形態においては、外部装置からの入力として、この目標追跡装置のパッシブセンサと離間して配置されたパッシブセンサからの情報が入力されるとともに、新たに距離・状態ベクトル算出部を設け、この距離・状態ベクトル算出部において2つのパッシブセンサからの目標の航跡、すなわち自装置内のパッシブセンサにより算出された目標の航跡と、外部装置からのパッシブセンサによる目標の航跡とから、それぞれのセンサから見た目標までの距離を算出すると共に、目標の(角度)航跡と目標までの距離とに基づきこの目標の状態ベクトルを算出し、その結果を補正情報算出部に送出するように構成した点である。以下、その相違点のみ簡単に説明する。
【0115】
図10に例示した目標追跡装置は、図1に例示した第1の実施形態の目標追跡装置の構成と同様のパッシブセンサ1−1、追跡処理部2a−1、制御部3−1、通信部4−1、及び補正情報算出部5aに加え、新たに距離・状態ベクトル算出部7を備えている。ここで、通信部4−1には、パッシブセンサを有する外部装置から、そのパッシブセンサでの測角データに基づき算出された目標の航跡が送られてくる。本実施例においては、このパッシブセンサを有する外部装置として、例えば第1の実施形態に例示した目標追跡装置を従属的にさらに1系統、離間させて配置した場合を示している。すなわち、パッシブセンサ1−2からの測角データに基づき追跡処理部2a−2で算出された目標の航跡が、通信部4−2から通信部4−1に送られ、さらに距離・状態ベクトル算出部7に入力される。
【0116】
距離・状態ベクトル算出部7は、異なる位置に配置された複数のパッシブセンサの測角データからそれぞれに算出された目標の航跡に基づいて、各パッシブセンサと目標との距離を算出すると共に、目標の(角度)航跡と目標までの距離とに基づきこの目標の状態ベクトルを算出し、補正情報算出部5aに送出する。本実施例では、複数のパッシブセンサからの目標の航跡として、自装置内のパッシブセンサ1−1からの測角データに基づき追跡処理部2a−1で算出された目標の航跡と、上記した外部装置から送られてきた目標の航跡とを用いている。また、距離算出にあたっては、これら2つの目標の航跡に基づいて、例えば三角測量等の手法を適用することができる。
【0117】
次に、この第6の実施形態における目標追跡処理の流れについてであるが、第1の実施形態と外部装置からの入力情報が異なることにより、(25)式に代入されるデータの経路について差異があるのみで、全体の処理の流れは第1の実施形態と同様であるので説明は省略する。
【0118】
このように、本実施形態によれば、第1の実施形態の効果に加え、外部装置として目標の距離を直接測定するようなアクティブなセンサを用いることなく、自装置も含め複数のパッシブなセンサからの情報のみに基づいて目標の追跡処理を行うことができる。なお、本実施形態の説明では、第1の実施形態を基にその構成を変更・付加したが、第3の実施形態及び第4の実施形態についても同様に構成することができる。
【0119】
以上説明したように、上述した本実施形態の目標追跡装置によれば、外部から入力される目標の状態ベクトルに基づいて、パッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出し、パッシブセンサからの測角データと補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力するので、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得ることができる。
【符号の説明】
【0120】
1 パッシブセンサ
2、2a、2b、2c、2d、2e 追跡処理部
3 制御部
4 通信部
5、5a、5b、5c、5d、5e 補正情報算出部
6a、6b、6bc、6c、6d 通信部
7 距離・状態ベクトル算出部
【技術分野】
【0001】
本発明の実施形態は、目標の角度を測定するパッシブセンサを用いて、目標の追跡を行なう目標追跡装置に関し、特に等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させる技術に関する。
【背景技術】
【0002】
図8は、従来の目標追跡装置の構成の一例を示すブロック図である。この目標追跡装置は、パッシブセンサ1、追跡処理部2および制御部3を備えている。パッシブセンサ1は、目標から放射(再放射を含む)される電磁波または音波の角度、換言すれば、目標の角度を測定し、測角データとして追跡処理部2に送る。追跡処理部2は、パッシブセンサ1からの測角データに基づいて、予測値および平滑値を算出し、目標航跡として制御部3に送る。追跡処理部2の詳細は後述する。制御部3は、追跡処理部2からの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0003】
次に、上記のように構成された従来の目標追跡装置の動作を説明する。図9は、従来の目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【0004】
目標追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて目標の観測を行い、目標の測角データを算出して追跡処理部2に送る。追跡処理部2は、パッシブセンサ1から送られてくる測角データを入力する。次いで、予測処理が実行される(ST102)。すなわち、追跡処理部2は、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列に基づいて、目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST103)。すなわち、追跡処理部2は、パッシブセンサ1からの目標の測角データと、ステップST102において算出された目標の予測値およびその共分散行列に基づいて、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0005】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2からの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0006】
次に、追跡処理部2の処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。なお、以下において、バーxは「x(−)」と表記する。
【数1】
【数2】
【数3】
【数4】
【数5】
【0007】
ここで、x(−)kは、観測時刻tkにおける方位角ak、高低角ekおよびそれらの速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのプロセス雑音ベクトル、σhkとσvkは、観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0008】
パッシブセンサ1の観測モデルを以下のように定義する。
【数6】
【数7】
【数8】
【0009】
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σakとσekは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
【0010】
上述したステップST101では、パッシブセンサ1からの測角データを観測ベクトルykとして入力する。
【0011】
上述したステップST102においては、前回観測時の平滑処理の結果を用いて、以下の式で表される予測処理が実施される。なお、以下において、ハットxは「x(^)」と表記する。
【数9】
【数10】
【数11】
【0012】
ここで、x(^)k|k−1とPk|k−1は、観測時刻tkの予測ベクトルと予測誤差共分散行列であり、x(^)k−1|k−1とPk−1|k−1は、観測時刻tk−1の平滑ベクトルと平滑誤差共分散行列である。なお、プロセス雑音共分散行列Qk−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
【0013】
上述したステップST103においては、パッシブセンサ1からの観測ベクトルと予測処理の結果を用いて、以下の式で表される平滑処理が実施される。なお、以下において、チルダyは「y(〜)」と表記する。
【数12】
【数13】
【数14】
【数15】
【数16】
【0014】
ここで、y(〜)kは、観測時刻tkのパッシブセンサ1の残差ベクトル、Skは、観測時刻tkのパッシブセンサ1の残差共分散行列、Kkは、観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)k|kとPk|kは、観測時刻tkの平滑ベクトルと平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0015】
以上説明したように、パッシブセンサ1の追跡処理では、パッシブセンサ1から目標までの距離情報が得られないため、プロセス雑音共分散行列Qk−1に誤差が発生する。この結果、この値から間接的に算出され、航跡算出に用いられるフィルタゲイン(カルマンゲイン行列)も、最適値が算出されず航跡誤差が大きくなる。また、非特許文献1に示すように、直交座標系で等速直線運動を行なっている目標に対しても、極座標系では、角加速度や角加速度の微分成分が発生するが、測角データからこの成分を推定して、プロセス雑音共分散行列Qk−1に反映させることは難しく、航跡誤差が大きくなる。
【0016】
そこで本願出願人は、特願2009−198342号により、この問題の解決を行うための提案を行った。この特願2009−198342号によれば、外部から入力される目標の状態ベクトルに基づいて、パッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出し、パッシブセンサからの測角データと補正情報とに基づいて、該パッシブセンサを中心とする座標系における目標の航跡を算出することによって、目標の追跡精度を向上させる技術が開示されている。これにより、特に等速直線運動を行う目標に対する追跡性能を向上させることができる。
【0017】
なお、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させる技術として、複数の運動モデルを並列動作させるIMM(Interacting Multiple Model)フィルタが、非特許文献3等に開示されているが、一般的に、多くの運動モデルが3次元直交座標系の運動として定義してあるために、目標の3次元情報が得られるアクティブセンサの処理に適用できるものの、2次元極座標系等で目標航跡の推定を行なう追跡処理部2に適用することは難しい。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開平7−128436号公報
【特許文献2】特開2009−38777号公報
【特許文献3】特開2002−181926号公報
【非特許文献】
【0019】
【非特許文献1】D. Howard, "Tracking Radar," in Radar Handbook, 2nd ed., ch.18, ed. M. Skolnik, McGraw-Hill, New York, 1990.
【非特許文献2】吉田孝監修,改訂 レーダ技術,pp.264-267,電子情報通信学会, 1996.
【非特許文献3】Y. Bar-Shalom, X. R. Li, T. Kirubarajan, "Estimation with Applications to Tracking and Navigation", Wiley-Interscience, 2001
【非特許文献4】系 正義,辻道信吾,小菅義夫,"拡張カルマンフィルタを用いた複数パッシブセンサによる3次元運動目標の追尾",電子情報通信学会論文誌B,vol.J82B, no.5, pp.1063-1072, May 1999
【非特許文献5】S.Blackman, "Association and fusion of multiple sensor data", Multitarget-multisensor Tracking Advanced Applications, Chapter6, Artech House, 1990
【発明の概要】
【発明が解決しようとする課題】
【0020】
上述したように、パッシブセンサを用いた目標追跡装置では、一般的には、パッシブセンサ1から目標までの距離情報が得られないため、航跡算出に用いられるフィルタゲインも、最適値が算出されず航跡誤差が大きくなる。また、同じ理由により、パッシブセンサを中心とするローカル座標系で目標を追跡することになるが、例えばローカル座標系として極座標系を用いる場合、目標が直交座標系で等速直線運動を行なっていても、極座標系では角加速度、角加速度の微分成分が発生する。これに対応しようとして、非特許文献2に示すように、フィルタゲインを大きくすると、航跡誤差のランダム成分が大きくなり、航跡誤差のランダム成分を小さくしようとしてフィルタゲインを小さくすると、航跡誤差のバイアス成分が大きくなるため、追跡性能を向上させることが難しいという問題がある。
【0021】
また、本願出願人が特願2009−198342号に開示した技術は上述したように優れた技術であるが、単一の運動モデルを前提としているために、等速直線運動を行う目標に最適化すると、等速直線以外の運動を行う目標に対する追跡性能が劣化し、等速直線以外の運動を行う目標に最適化すると、等速直線運動を行う目標に対する追跡性能が劣化して、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができないという問題がある。
【0022】
なお、特許文献1には、パッシブセンサとアクティブセンサを組み合わせ、パッシブセンサとアクティブセンサからの情報に基づいて、アクティブセンサを制御する低被探知性センサ装置が開示され、特許文献2には、パッシブセンサとしてカメラを用い、カメラのパン・チルト制御を制御ベクトルとして考慮する自動追尾装置が開示されている。
【0023】
本発明の課題は、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができる目標追跡装置を提供することにある。
【課題を解決するための手段】
【0024】
上記課題を解決するために、本実施形態の目標追跡装置は、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離を算出することと、前記追跡処理部は、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列に基づいて、目標の航跡を算出することとを特徴とする。
【0025】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、前記追跡処理部は、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率に基づいて、目標の航跡を算出することとを特徴とする。
【0026】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出し、算出した複数の運動モデルに対応する予測値に基づいて、目標の航跡を算出することとを特徴とする。
【0027】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離を算出することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応する予測値とプロセス雑音共分散行列に基づいて、目標の航跡を算出することとを特徴とする。
【0028】
また、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、これら複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応する予測値、プロセス雑音共分散行列および運動モデル確率に基づいて、目標の航跡を算出することを特徴とする。
【図面の簡単な説明】
【0029】
【図1】第1の実施形態に係る目標追跡装置の構成を示すブロック図である。
【図2】第1の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図3】第2の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図4】第3の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図5】第4の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図6】第5の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図7】第1の実施形態〜第5の実施形態の変形例に係る目標追跡装置の構成を示すブロック図である。
【図8】従来の目標追跡装置の構成の一例を示すブロック図である。
【図9】従来の目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。
【図10】第6の実施形態に係る目標追跡装置の構成を示すブロック図である。
【発明を実施するための形態】
【0030】
以下、本実施形態の目標追跡装置を、図面を参照しながら詳細に説明する。なお、以下においては、背景技術の欄で説明した構成部分と同一または相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例1】
【0031】
図1は、第1の実施形態に係る目標追跡装置の構成を示すブロック図である。この目標追跡装置は、パッシブセンサ1、追跡処理部2a、制御部3、通信部4および補正情報算出部5aを備えている。
【0032】
パッシブセンサ1は、目標の角度を測定し、測角データとして追跡処理部2aに送る。通信部4は、外部装置から入力される目標の状態ベクトルを補正情報算出部5aに送る。補正情報算出部5aは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)を算出し、追跡処理部2aに送る。
【0033】
追跡処理部2aは、パッシブセンサ1からの測角データと補正情報算出部5aからの補正情報(目標距離)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。制御部3は、追跡処理部2aからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0034】
次に、上記のように構成される第1の実施形態に係る目標追跡装置の動作を説明する。図2は、第1の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、従来の目標追跡装置の目標追跡処理と同じ処理を行うステップには、従来の目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0035】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2aに送る。追跡処理部2aは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5aは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2aに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2aは、補正情報算出部5aからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0036】
次いで、予測処理が実行される(ST113)。すなわち、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列とステップST112において算出された複数の運動モデルに対応するプロセス雑音共分散行列とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2aは、パッシブセンサ1からの目標の測角データとステップST113において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0037】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2aからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0038】
次に、補正情報算出部5aと追跡処理部2aの処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
【数17】
【数18】
【数19】
【数20】
【数21】
【0039】
ここで、xikは、i番目の運動モデルに対応する観測時刻tkにおける方位角aik、高低角eikとそれらの速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wikは、i番目の運動モデルに対応する観測時刻tkの平均0、i番目の運動モデルに対応する共分散行列Qikのプロセス雑音ベクトル、σh,ikとσv,ikは、i番目の運動モデルに対応する観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0040】
パッシブセンサ1の観測モデルを以下のように定義する。
【数22】
【数23】
【数24】
【0041】
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、xtkは、観測時刻tkの真の状態ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σakとσekは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
【0042】
上述したステップST101では、パッシブセンサ1からの測角データを観測ベクトルykとして入力する。
【0043】
上述したステップST111では、外部装置から入力される目標の状態ベクトルに基づいて、補正情報として、目標距離r(^)k−1を算出する。
【数25】
【0044】
ここで、xk−1、yk−1、zk−1は、観測時刻tk−1の目標の状態ベクトルの位置のx、y、z成分、x0、y0、z0は、パッシブセンサ1の位置のx、y、z成分である。
【0045】
なお、外部装置としては、アクティブセンサであるレーダ装置等を使用できる。また、パッシブセンサ1と、略同位置に置かれた測距装置を用いて、目標距離を直接測定するように構成することができる。
【0046】
上述したステップST112では、補正情報算出部5aからの補正情報(目標距離)に基づいて、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を算出する。
【数26】
【0047】
上述したステップST113では、前回観測時の平滑処理の結果とステップST112の(26)式のi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、以下の式で表される予測処理を実施する。
【数27】
【数28】
【0048】
ここで、x(^)ik|k−1とPik|k−1は、i番目の運動モデルに対応する観測時刻tkの予測ベクトルと予測誤差共分散行列であり、x(^)ik−1|k−1とPik−1|k−1は、i番目の運動モデルに対応する観測時刻tk−1の平滑ベクトルと平滑誤差共分散行列である。
【0049】
上述したステップST114では、パッシブセンサ1からの観測ベクトルと予測処理の結果を用いて、以下の式で表される平滑処理を実施する。
【数29】
【数30】
【数31】
【数32】
【数33】
【数34】
【数35】
【数36】
【0050】
ここで、y(〜)ikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1の残差ベクトル、Sikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1の残差共分散行列、Kikは、i番目の運動モデルに対応する観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)ik|kとPik|kは、i番目の運動モデルに対応する観測時刻tkの平滑ベクトルと平滑誤差共分散行列、pikは、i番目の運動モデルに対応する観測時刻tkの運動モデル確率、likは、i番目の運動モデルに対応する観測時刻tkの運動モデル尤度、x(^)k|kとPk|kは、複数の運動モデルを加重平均した観測時刻tkの平滑ベクトルと平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0051】
以上説明したように、第1の実施形態に係る目標追跡装置によれば、補正情報算出部5aは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離)を追跡処理部2aに送り、追跡処理部2aは、補正情報算出部5aからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、この値から間接的に算出されるフィルタゲイン(カルマンゲイン行列)を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。
【0052】
なお、上記では、目標の運動モデルとして、等速運動モデルを用いたが、等加速度運動モデル等の他の運動モデルと組み合わせることができる。また、上記では、追跡処理部2aで実施する処理として、非特許文献3等に開示されているIMMフィルタの処理を簡略化して示しているが、IMMフィルタの処理を適用できるのは、勿論である。
【0053】
なお、上記では、追跡処理部2aの目標の状態ベクトルとして、極座標系を用いた例を示したが、特許文献2に示されているように、カメラの画像上の目標の位置等(水平、垂直座標とその速度)を用いるように構成することができる。
【0054】
また、上述した第1の実施形態に係る目標追跡装置では、補正情報算出部5aは補正情報として目標距離を算出し、追跡処理部2aは、この補正情報(目標距離)に基づいて複数の運動モデルに対応するプロセス雑音共分散行列を算出するように構成したが、補正情報算出部5aは補正情報として複数の運動モデルに対応するプロセス雑音共分散行列を算出し、追跡処理部2aは、この補正情報(複数の運動モデルに対応するプロセス雑音共分散行列)に基づいてフィルタゲインを算出するように構成することができる。
【実施例2】
【0055】
第2の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5bおよび追跡処理部2b(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0056】
補正情報算出部5bは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)と目標のプロセス雑音共分散行列を算出し、追跡処理部2bに送る。追跡処理部2bは、パッシブセンサ1からの測角データと補正情報算出部5bからの補正情報(目標距離とプロセス雑音共分散行列)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0057】
次に、上記のように構成される第2の実施形態に係る目標追跡装置の動作を説明する。図3は、第2の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0058】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2bに送る。追跡処理部2bは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2bに送る。
【0059】
次いで、補正情報算出処理(共分散)が実行される(ST121)。すなわち、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標のプロセス雑音共分散行列を算出し、補正情報(プロセス雑音共分散行列)として追跡処理部2bに送る。なお、外部装置としては、目標のプロセス雑音共分散行列を推定できる、例えば特許文献3等に記載のアダプティブカルマンフィルタや非特許文献3等に記載のIMMフィルタを備えたレーダ装置等を使用できる。
【0060】
次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2bは、補正情報算出部5bからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。次いで、運動モデル確率算出処理が実行される(ST122)。すなわち、追跡処理部2bは、補正情報算出部5bからの補正情報(プロセス雑音共分散行列)に基づいて、複数の運動モデルに対応する運動モデル確率を算出する。次いで、予測処理が実行される(ST113)。すなわち、追跡処理部2bは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列とステップST112において算出された複数の運動モデルに対応するプロセス雑音共分散行列とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。
【0061】
次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2bは、パッシブセンサ1からの目標の測角データとステップST113において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2bからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
【0062】
次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0063】
次に、補正情報算出部5bと追跡処理部2bの処理内容について、詳細に説明する。目標の運動モデルとパッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101とステップST111の処理内容も、第1の実施形態と同じであるので説明を省略する。
【0064】
上述したステップST121では、外部装置から入力される目標の状態ベクトル(プロセス雑音共分散行列Qak−1を含む)に基づいて、補正情報として、パッシブセンサ1から見たプロセス雑音共分散行列Qk−1を算出する。
【数37】
【0065】
ここで、外部装置から入力されるプロセス雑音共分散行列Qak−1が以下の(38)式で表されるとすると、変換行列Tk−1は、(39)式のようになる。なお、(xk−1、yk−1、zk−1)、(ak−1、ek−1)は、座標変換によって、外部装置から入力される目標の状態ベクトルをパッシブセンサ1から見た目標の位置ベクトル(直交座標系と極座標系)に変換した値である。
【数38】
【数39】
【0066】
上述したステップST112の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0067】
上述したステップST122では、ステップST121で算出したプロセス雑音共分散行列Qk−1とステップST112で算出したi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、(40)式を満足するi番目の運動モデルに対応する運動モデル確率pik−1を算出する。
【数40】
【0068】
なお、定義(設定)した運動モデルが実際の運動モデルと厳密に当てはまらない場合、モデル化の誤差成分を加味して、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を補正するように構成することができる。
【0069】
上述したステップST113の処理内容は、実施例1と同じであるので説明を省略する。上述したステップST114では、前回観測時の平滑処理(ステップST114)の(34)式の代わりに、ST122の(40)式で算出したi番目の運動モデルに対応する運動モデル確率pik−1を用いて、平滑処理を実施する。
【0070】
上述したステップST104とステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0071】
以上説明したように、第2の実施形態に係る目標追跡装置によれば、補正情報算出部5bは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離とプロセス雑音共分散行列)を追跡処理部2bに送り、追跡処理部2bは、補正情報(目標距離)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。また、追跡処理部2bは、補正情報(プロセス雑音共分散行列)から間接的に算出される複数の運動モデルに対応する運動モデル確率を航跡算出に用いるので、観測回数が少ない追跡初期段階や、前回観測以降に目標の運動モデルが変化した場合でも、航跡誤差を小さくすることができる。
【実施例3】
【0072】
第3の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5cおよび追跡処理部2c(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0073】
補正情報算出部5cは、通信部4から送られてきた目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは(17)式で定義(設定)した極座標系の等速運動モデルが直交座標系の等速運動モデルと厳密に当てはまらないことにより発生する目標の角加速度を制御入力ベクトルとみなして算出し、追跡処理部2cに送る。追跡処理部2cは、パッシブセンサ1からの測角データと補正情報算出部5cからの補正情報(制御入力ベクトル)とに基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0074】
次に、上記のように構成される第3の実施形態に係る目標追跡装置の動作を説明する。図4は、第3の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1または第2の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1または第2の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0075】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2cに送る。追跡処理部2cは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5cは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2cに送る。
【0076】
次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2cは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5cからの補正情報(制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2cは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0077】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2cからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0078】
次に、補正情報算出部5cと追跡処理部2cの処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
【数41】
【数42】
【数43】
【数44】
【数45】
【数46】
【0079】
ここで、xikは、i番目の運動モデルに対応する観測時刻tkにおける方位角aik、高低角eikとそれらの速度成分からなる状態ベクトル、ukは、観測時刻tkにおける方位角ak、高低角ekの加速度成分からなる制御入力ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wikは、i番目の運動モデルに対応する観測時刻tkの平均0、i番目の運動モデルに対応する共分散行列Qikのプロセス雑音ベクトル、σh,ikとσv,ikは、i番目の運動モデルに対応する観測時刻tkにおけるプロセス雑音の水平面と垂直面の標準偏差、rkは、観測時刻tkにおけるパッシブセンサ1から目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0080】
パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101の処理内容も、第1の実施形態と同じであるので説明を省略する。上述したステップST131では、外部装置から入力される目標の状態ベクトルに基づいて、補正情報として、制御入力ベクトル(角加速度)uk−1を算出する。
【数47】
【0081】
なお、制御入力ベクトル(角加速度)uk−1は、以下の式で算出する。
【数48】
【0082】
ここで、(xk−1、yk−1、zk−1)、(x(・)k−1、y(・)k−1、z(・)k−1)、(a(・)k−1、e(・)k−1)は、座標変換によって、外部装置から入力される目標の状態ベクトルをパッシブセンサ1から見た目標の位置ベクトル、速度ベクトルおよび角速度ベクトルに変換した値である。
【0083】
上述したステップST132では、前回観測時の平滑処理の結果と制御入力ベクトルuk−1を用いて、以下の式で表される予測処理を実施する。
【数49】
【数50】
【数51】
【0084】
なお、i番目の運動モデルに対応するプロセス雑音共分散行列Qik−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
【0085】
上述したステップST114、ステップST104およびステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0086】
以上説明したように、第3の実施形態に係る目標追跡装置によれば、補正情報算出部5cは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(制御入力ベクトル)を追跡処理部2cに送り、追跡処理部2cは、補正情報算出部5cからの補正情報(制御入力ベクトル)から間接的に算出される複数の運動モデルに対応する予測値を航跡算出に用いるので、等速直線運動を行う目標と等速直線以外の運動を行う目標に対し、航跡誤差(バイアス成分)を小さくすることができる。
【0087】
なお、上記では、目標の運動モデルとして、等速運動モデルを用いたが、等加速度運動モデル等の他の運動モデルと組み合わせることができる。また、制御入力ベクトルuk−1は、運動モデルによらず一定としたが、運動モデル毎に異なる値や微分次数(角加加速度等)を取るように構成することができる。さらに、上記では、追跡処理部2cで実施する処理として、非特許文献3等に開示されているIMMフィルタの処理を簡略化して示しているが、IMMフィルタの処理を適用できるのは、勿論である。
【実施例4】
【0088】
第4の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5dおよび追跡処理部2d(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0089】
補正情報算出部5dは、通信部4から送られてくる目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)と制御入力ベクトルを算出し、追跡処理部2dに送る。追跡処理部2dは、パッシブセンサ1からの測角データと補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)に基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0090】
次に、上記のように構成される第4の実施形態に係る目標追跡装置の動作を説明する。図5は、第4の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態〜第3の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態〜第3の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0091】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2dに送る。追跡処理部2dは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2dに送る。
【0092】
次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2dに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2dは、補正情報算出部5dからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0093】
次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2dは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。
【0094】
次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2dは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0095】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2dからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0096】
次に、補正情報算出部5dと追跡処理部2dの処理内容について、詳細に説明する。目標の運動モデルは、第3の実施形態と同じであるので説明を省略する。また、パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101、ステップST111およびステップST112の処理内容は、第1の実施形態と同じであり、上述したステップST131の処理内容は、第3の実施形態と同じであるので説明を省略する。
【0097】
上述したステップST132では、(51)式の代わりに、ステップST112の(26)式のi番目の運動モデルに対応するプロセス雑音共分散行列Qik−1を用いて、予測処理を実施する。上述したステップST114、ステップST104およびステップST105の処理内容は、第1の実施形態と同じであるので説明を省略する。
【0098】
以上説明したように、第4の実施形態に係る目標追跡装置によれば、補正情報算出部5dは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離と制御入力ベクトル)を追跡処理部2dに送り、追跡処理部2dは、補正情報算出部5dからの補正情報(目標距離と制御入力ベクトル)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)と予測値を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分とバイアス成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。
【実施例5】
【0099】
第5の実施形態に係る目標追跡装置の構成は、図1に示した第1の実施形態に係る目標追跡装置の補正情報算出部5aおよび追跡処理部2aが、補正情報算出部5eおよび追跡処理部2e(いずれも図示は省略)にそれぞれ変更されて構成されている。以下では、第1の実施形態に係る目標追跡装置と異なる部分についてのみ説明する。
【0100】
補正情報算出部5eは、通信部4から送られてくる目標の状態ベクトルに基づいて、パッシブセンサ1を中心とするローカル座標系(極座標系)における補正情報、ここでは目標距離(パッシブセンサ1から目標までの距離)、目標のプロセス雑音共分散行列および制御入力ベクトルを算出し、追跡処理部2eに送る。追跡処理部2eは、パッシブセンサ1からの測角データと補正情報算出部5eからの補正情報(目標距離、プロセス雑音共分散行列および制御入力ベクトル)に基づいて、複数の運動モデルに対応する予測値および複数の運動モデルに対応する平滑値を算出すると共に、複数の運動モデルに対応する平滑値を加重平均した平滑値を算出し、目標航跡として制御部3に送る。
【0101】
次に、上記のように構成される第5の実施形態に係る目標追跡装置の動作を説明する。図6は、第5の実施形態に係る目標追跡装置において行われる目標追跡処理の流れを示すフローチャートである。なお、以下においては、第1の実施形態〜第4の実施形態に係る目標追跡装置の目標追跡処理と同じ処理を行うステップには、第1の実施形態〜第4の実施形態に係る目標追跡処理の説明で使用した符号と同じ符号を付して説明する。
【0102】
追跡処理が開始されると、測角データが入力される(ST101)。すなわち、パッシブセンサ1は、制御部3からの制御信号に基づいて、目標の観測を行い、目標の測角データを追跡処理部2eに送る。追跡処理部2eは、パッシブセンサ1から送られてくる測角データを入力する。次いで、補正情報算出処理(目標距離)が実行される(ST111)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、パッシブセンサ1から目標までの距離を算出し、補正情報(目標距離)として追跡処理部2eに送る。
【0103】
次いで、補正情報算出処理(共分散)が実行される(ST121)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標のプロセス雑音共分散行列を算出し、補正情報(プロセス雑音共分散行列)として追跡処理部2eに送る。なお、外部装置としては、目標のプロセス雑音共分散行列を推定できるアダプティブカルマンフィルタやIMMフィルタを備えたレーダ装置等を使用できる。
【0104】
次いで、補正情報算出処理(制御入力)が実行される(ST131)。すなわち、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、パッシブセンサ1からの測角データを入力して目標の航跡を算出するための補正情報として、目標の制御入力ベクトルを算出し、補正情報(制御入力ベクトル)として追跡処理部2eに送る。次いで、共分散算出処理が実行される(ST112)。すなわち、追跡処理部2eは、補正情報算出部5eからの補正情報(目標距離)に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出する。
【0105】
次いで、運動モデル確率算出処理が実行される(ST122)。すなわち、追跡処理部2eは、補正情報算出部5eからの補正情報(プロセス雑音共分散行列)に基づいて、複数の運動モデルに対応する運動モデル確率を算出する。次いで、予測処理が実行される(ST132)。すなわち、追跡処理部2eは、前回観測時のステップST114において算出された複数の運動モデルに対応する目標の平滑値およびその共分散行列と補正情報算出部5eからの補正情報(目標距離と制御入力ベクトル)とに基づいて、複数の運動モデルに対応する目標の予測値およびその共分散行列を算出する。次いで、平滑処理が実行される(ST114)。すなわち、追跡処理部2eは、パッシブセンサ1からの目標の測角データとST132において算出された複数の運動モデルに対応する目標の予測値およびその共分散行列とに基づいて、複数の運動モデルに対応する目標の平滑値およびその共分散行列を算出すると共に、これらを加重平均して、目標の平滑値およびその共分散行列を算出し、目標航跡として制御部3に送る。
【0106】
次いで、制御処理が実行される(ST104)。すなわち、制御部3は、追跡処理部2eからの目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
【0107】
次に、補正情報算出部5eと追跡処理部2eの処理内容について、詳細に説明する。目標の運動モデルは、第3の実施形態と同じであるので説明を省略する。また、パッシブセンサ1の観測モデルは、第1の実施形態と同じであるので説明を省略する。上述したステップST101、ステップST111およびステップST112の処理内容は、第1の実施形態と同じであり、上述したステップST121とステップST122の処理内容は、第2の実施形態と同じであり、上述したステップST131とステップST132の処理内容は、第3の実施形態と同じであるので説明を省略する。
【0108】
上述したステップST114では、前回観測時の平滑処理(ステップST114)の(34)式の代わりに、ステップST122の(40)式で算出したi番目の運動モデルに対応する運動モデル確率pik−1を用いて、平滑処理を実施する。
【0109】
上述したステップST104とステップST105の処理内容は、第1の実施例と同じであるので説明を省略する。
【0110】
以上説明したように、第5の実施形態に係る目標追跡装置によれば、補正情報算出部5eは、外部装置から入力される目標の状態ベクトルに基づいて、補正情報(目標距離、プロセス雑音共分散行列および制御入力ベクトル)を追跡処理部2eに送り、追跡処理部2eは、補正情報算出部5eからの補正情報(目標距離と制御入力ベクトル)から間接的に算出される複数の運動モデルに対応するフィルタゲイン(カルマンゲイン行列)と予測値を航跡算出に用いるので、等速直線運動を行う目標の航跡誤差(ランダム成分とバイアス成分)と等速直線以外の運動を行う目標の航跡誤差(バイアス成分)を小さくすることができる。また、追跡処理部2eは、補正情報(プロセス雑音共分散行列)から間接的に算出される複数の運動モデルに対応する運動モデル確率を航跡算出に用いるので、等速直線運動を行う目標と等速直線以外の運動を行う目標に対し、観測回数が少ない追跡初期段階や、前回観測以降に目標の運動モデルが変化した場合でも、航跡誤差を小さくすることができる。
【0111】
(変形例)上述した第1の実施形態〜第5の実施形態に係る目標追跡装置は、図7に示すように変形することができる。図7(a)は、補正情報算出部5a〜5eと追跡処理部2a〜2eとの間に通信部6aおよび通信部6bを設け、補正情報算出部5a〜5eを含むブロックと追跡処理部2a〜2eを含むブロックとを別体に構成したものである。
【0112】
図7(b)は、追跡処理部2a〜2eとパッシブセンサ1との間に通信部6cおよび通信部6dを設け、パッシブセンサ1を含むブロックと追跡処理部2a〜2eを含むブロックとを別体に構成したものである。
【0113】
図7(c)は、補正情報算出部5a〜5eと追跡処理部2a〜2eとの間に通信部6aおよび通信部6bcを設けるとともに、通信部6bcとパッシブセンサ1との間に通信部6dを設け、補正情報算出部5a〜5eを含むブロック、パッシブセンサ1を含むブロックおよび追跡処理部2a〜2eを含むブロックの各々を別体に構成したものである。これらの変形例のいずれにおいても、第1の実施形態〜第5の実施形態において記載した効果と同様の効果を得ることができる。
【実施例6】
【0114】
図10は、第6の実施形態に係る目標追跡装置の構成の一例を示すブロック図である。この第6の実施形態について、図1に示した第1の実施形態の各部と同一の部分は同一の符号で示し、その説明を省略する。この第6の実施形態が第1の実施形態と異なる点は、外部装置から入力される目標に関する情報について、第1の実施形態においては、外部装置から位置情報を含む目標の状態ベクトルが入力される。すなわち、外部装置としてレーダ装置や測距装置等のアクティブセンサを用いて取得した情報が入力されるのに対して、この第6の実施形態においては、外部装置からの入力として、この目標追跡装置のパッシブセンサと離間して配置されたパッシブセンサからの情報が入力されるとともに、新たに距離・状態ベクトル算出部を設け、この距離・状態ベクトル算出部において2つのパッシブセンサからの目標の航跡、すなわち自装置内のパッシブセンサにより算出された目標の航跡と、外部装置からのパッシブセンサによる目標の航跡とから、それぞれのセンサから見た目標までの距離を算出すると共に、目標の(角度)航跡と目標までの距離とに基づきこの目標の状態ベクトルを算出し、その結果を補正情報算出部に送出するように構成した点である。以下、その相違点のみ簡単に説明する。
【0115】
図10に例示した目標追跡装置は、図1に例示した第1の実施形態の目標追跡装置の構成と同様のパッシブセンサ1−1、追跡処理部2a−1、制御部3−1、通信部4−1、及び補正情報算出部5aに加え、新たに距離・状態ベクトル算出部7を備えている。ここで、通信部4−1には、パッシブセンサを有する外部装置から、そのパッシブセンサでの測角データに基づき算出された目標の航跡が送られてくる。本実施例においては、このパッシブセンサを有する外部装置として、例えば第1の実施形態に例示した目標追跡装置を従属的にさらに1系統、離間させて配置した場合を示している。すなわち、パッシブセンサ1−2からの測角データに基づき追跡処理部2a−2で算出された目標の航跡が、通信部4−2から通信部4−1に送られ、さらに距離・状態ベクトル算出部7に入力される。
【0116】
距離・状態ベクトル算出部7は、異なる位置に配置された複数のパッシブセンサの測角データからそれぞれに算出された目標の航跡に基づいて、各パッシブセンサと目標との距離を算出すると共に、目標の(角度)航跡と目標までの距離とに基づきこの目標の状態ベクトルを算出し、補正情報算出部5aに送出する。本実施例では、複数のパッシブセンサからの目標の航跡として、自装置内のパッシブセンサ1−1からの測角データに基づき追跡処理部2a−1で算出された目標の航跡と、上記した外部装置から送られてきた目標の航跡とを用いている。また、距離算出にあたっては、これら2つの目標の航跡に基づいて、例えば三角測量等の手法を適用することができる。
【0117】
次に、この第6の実施形態における目標追跡処理の流れについてであるが、第1の実施形態と外部装置からの入力情報が異なることにより、(25)式に代入されるデータの経路について差異があるのみで、全体の処理の流れは第1の実施形態と同様であるので説明は省略する。
【0118】
このように、本実施形態によれば、第1の実施形態の効果に加え、外部装置として目標の距離を直接測定するようなアクティブなセンサを用いることなく、自装置も含め複数のパッシブなセンサからの情報のみに基づいて目標の追跡処理を行うことができる。なお、本実施形態の説明では、第1の実施形態を基にその構成を変更・付加したが、第3の実施形態及び第4の実施形態についても同様に構成することができる。
【0119】
以上説明したように、上述した本実施形態の目標追跡装置によれば、外部から入力される目標の状態ベクトルに基づいて、パッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出し、パッシブセンサからの測角データと補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力するので、等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得ることができる。
【符号の説明】
【0120】
1 パッシブセンサ
2、2a、2b、2c、2d、2e 追跡処理部
3 制御部
4 通信部
5、5a、5b、5c、5d、5e 補正情報算出部
6a、6b、6bc、6c、6d 通信部
7 距離・状態ベクトル算出部
【特許請求の範囲】
【請求項1】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離を算出することと、
前記追跡処理部は、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列に基づいて、目標の航跡を算出すること
を特徴とする目標追跡装置。
【請求項2】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、
前記追跡処理部は、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項3】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出し、算出した複数の運動モデルに対応する予測値に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項4】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離を算出することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応する予測値とプロセス雑音共分散行列に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項5】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、これら複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応する予測値、プロセス雑音共分散行列および運動モデル確率に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項6】
さらに、前記パッシブセンサからの測角データを入力して前記追跡処理部にて算出された目標の航跡と、前記パッシブセンサとは離間して配置されたパッシブセンサからの測角データに基づき算出された前記目標の航跡とに基づき前記目標までの距離情報を算出すると共に、前記目標の航跡と前記距離情報とに基づき前記目標の状態ベクトルを算出して前記補正情報算出部に出力する距離・状態ベクトル算出部を備え、
前記補正情報算出部は、この距離・状態ベクトル算出部からの前記目標の状態ベクトルに基づいて前記補正情報を算出する
ことを特徴とする請求項1、請求項3、または請求項4のいずれか1項に記載の目標追跡装置。
【請求項1】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離を算出することと、
前記追跡処理部は、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列に基づいて、目標の航跡を算出すること
を特徴とする目標追跡装置。
【請求項2】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、
前記追跡処理部は、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応するプロセス雑音共分散行列と運動モデル確率に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項3】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出し、算出した複数の運動モデルに対応する予測値に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項4】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力される目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離を算出することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列を算出し、算出した複数の運動モデルに対応する予測値とプロセス雑音共分散行列に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項5】
目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して複数の運動モデルに対応する目標の航跡を算出し、これら複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部と、前記追跡処理部に補正情報を出力する補正情報算出部とを備えた目標追跡装置であって、
前記補正情報算出部は、外部から入力されるプロセス雑音共分散行列を含む目標の状態ベクトルに基づいて、補正情報として、前記パッシブセンサの位置における目標のバイアス誤差を算出して制御入力として出力するとともに、前記パッシブセンサから目標までの距離と前記パッシブセンサの位置における目標のプロセス雑音共分散行列を算出することと、
前記追跡処理部は、前記補正情報算出部から出力される制御入力に基づいて、複数の運動モデルに対応する目標の予測値を算出するとともに、前記補正情報算出部で算出された目標までの距離とプロセス雑音共分散行列に基づいて、複数の運動モデルに対応する目標のプロセス雑音共分散行列と運動モデル確率を算出し、算出した複数の運動モデルに対応する予測値、プロセス雑音共分散行列および運動モデル確率に基づいて、目標の航跡を算出することと
を特徴とする目標追跡装置。
【請求項6】
さらに、前記パッシブセンサからの測角データを入力して前記追跡処理部にて算出された目標の航跡と、前記パッシブセンサとは離間して配置されたパッシブセンサからの測角データに基づき算出された前記目標の航跡とに基づき前記目標までの距離情報を算出すると共に、前記目標の航跡と前記距離情報とに基づき前記目標の状態ベクトルを算出して前記補正情報算出部に出力する距離・状態ベクトル算出部を備え、
前記補正情報算出部は、この距離・状態ベクトル算出部からの前記目標の状態ベクトルに基づいて前記補正情報を算出する
ことを特徴とする請求項1、請求項3、または請求項4のいずれか1項に記載の目標追跡装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−189585(P2012−189585A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−39199(P2012−39199)
【出願日】平成24年2月24日(2012.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成24年2月24日(2012.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]