
目標運動推測システム及び方法
【課題】各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供する。
【解決手段】未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られる目標のドップラー速度を成分とするドップラーベクトルを生成し、さらに各センサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成する。そして、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築し、この連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求める。
【解決手段】未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られる目標のドップラー速度を成分とするドップラーベクトルを生成し、さらに各センサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成する。そして、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築し、この連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信した電波、音波、光波等から検出した目標を追尾・追跡し、該目標の運動パラメータを推測する目標運動推測システム及び方法に関し、特に目標の速度及び該速度の時間変化を推測する目標運動推測システム及び方法に関する。
【背景技術】
【0002】
レーダー(Radar:Radio detecting and ranging)、ソーナー(Sonar:Sound navigation and ranging)、ライダー(Lidar:Light detecting and ranging)等を用いて目標を検出して追跡する方法としては、例えば特許文献1に記載されたMHT(Multiple Hypothesis Tracking:多重仮説追尾)法が知られている。また、目標の誤検出や検出漏れの頻度が低い場合は、周知のカルマンフィルタやパーティクルフィルタを用いることで、目標を検出して追跡することが可能である。
【0003】
上記の何れの方法においても、複数回の探信で得られる目標の位置及び該位置の時間変化から該目標の速度や該速度の時間変化(加速度等)を推測できる。さらに、目標の位置だけではなく、受信した電波、音波、光波等の波の情報から求まる目標のドップラー速度を用いることで、より高精度に目標の速度や該速度の時間変化を推測できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009‐192550号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したように、従来の方法ではカルマンフィルタやパーティクルフィルタ等の時系列フィルタを用いるため、目標の速度や該速度の時間変化を求めるためには複数回の探信が必要となる。そのため、目標の速度や加速度が大きいと、探信間隔によっては目標の速度や該速度の時間変化の推定精度が低下する可能性がある。
【0006】
また、カルマンフィルタやパーティクルフィルタの処理で目標のドップラー速度を利用する場合、ドップラー速度から速度ベクトルへの非線形変換において線形近似を用いることになるため、目標の速度の推定精度が大きく低下することがある。カルマンフィルタを利用するMHT法についても同様である。
【0007】
本発明は上述したような背景技術が有する問題点を解決するためになされたものであり、各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため本発明の目標運動推測システムは、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出する速度パラメータ推定手段と、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する統計パラメータ算出手段と、
を有する。
【0009】
または、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する最適速度パラメータ推定手段と、
を有する。
【0010】
一方、本発明の目標運動推測方法は、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
コンピュータが、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、
前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出し、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する方法である。
【0011】
または、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、
前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する方法である。
【発明の効果】
【0012】
本発明によれば、各探信の度に目標の速度及び該速度の時間変化を取得できる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図2】第2の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図3】第3の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図4a】3次元空間における目標の方位ベクトルの定義例を示す模式図である。
【図4b】3次元空間における目標の速度ベクトルの定義例を示す模式図である。
【図4c】3次元空間における目標の加速度ベクトルの定義例を示す模式図である。
【図5】2次元平面座標における目標の速度ベクトル及び加速度ベクトルの定義例を示す模式図である。
【図6】2次元球面座標における目標の速度ベクトル及び加速度ベクトルの定義例を示す模式図である。
【発明を実施するための形態】
【0014】
次に本発明について図面を用いて説明する。
(第1の実施の形態)
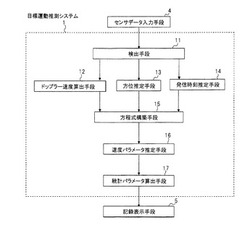
図1は、第1の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0015】
図1に示すように、第1の実施の形態の目標運動推測システム1は、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14、方程式構築手段15、速度パラメータ推定手段16及び統計パラメータ算出手段17を有する。
【0016】
図1に示す目標運動推測システム1は、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現することも可能である。目標運動推測システム1には、センサデータ入力手段4で観測された電波、音波、光波等の観測データが入力される。観測データは、目標運動推測システム1が備える検出手段11へ入力される。また、目標運動推測システム1で推測された目標の速度や該速度の時間変化は記録表示手段5へ出力され、記録表示手段5で表示される。
【0017】
センサデータ入力手段4は、到来する電波、音波、光波等を受信して電気信号に変換する、一つまたは複数のセンサを備えたレーダー、ソーナー、ライダー等である。センサデータ入力手段4の観測データには、目標から発せられた電波、音波、光波等の波長、振幅、位相、変調方式等が時系列に変動したデータである波形情報が含まれる。
【0018】
複数のセンサを備えたセンサデータ入力手段4では、一般に該複数のセンサが直線上に半波長間隔(検出波長の半波長間隔)で配置されることが多い。本実施形態では、センサデータ入力手段4が備えるセンサは、リング状、球面状、結晶格子形状と似た立体格子状等、どのよう形状で配置されていてもよい。また、各センサの感度特性や波長特性は同じであってもよく、異なっていてもよい。また、本実施形態では、電波、音波、光波等の波の送信源が1つであり、波を受信するセンサが複数となるマルチスタティック構成を想定しているが、周知の周波数分割やコード分割等を用いて各送信波どうしの干渉を避けることができれば、波の送信源は複数であってもよい。
【0019】
検出手段11は、センサデータ入力手段4から入力された観測データに対して追跡対象となる目標を検出するための目標検出処理を実施し、その検出結果をドップラー速度算出手段12、方位推定手段13及び発信時刻推定手段14へそれぞれ出力する。目標検出処理によって検出される目標の数は、0の場合、1の場合、あるいは複数の場合がある。検出手段11は、センサデータ入力手段4から入力された観測データに目標検出処理を直接実施してもよく、センサデータ入力手段4から入力された観測データを所定の直交関数で変換(例えば、フーリエ変換等)した後、目標検出処理を実施してもよい。
【0020】
検出手段11で実施する目標検出処理には、周知の目標検出方法を用いればよい。最も単純な方法としては、例えばセンサから送信された波が目標で反射され、その反射波(エコー)を受信することで目標を検出する方法がある。その場合、送信波の情報(周波数または波長)をテンプレートに用いて受信波との相関を取り、相関係数が予め設定したしきい値よりも大きい場合に目標であると判定する方法がある。また、様々な雑音環境下で目標から発信される波の情報を予め登録しておき、該登録した波の情報をテンプレートに用いて受信波との相関を取る方法、あるいは周知のニューラルネットワーク、サポートベクターマシン、アダブースト等の機械学習アルゴリズムを用いて学習することで目標から発信される波のテンプレートを作成し、該テンプレートに基づいて受信波をパターン認識することで目標が存在するか否かを判定する方法を用いてもよい。目標検出処理は、センサデータ入力手段4から観測データが入力される毎に実施してもよく、予め設定されたタイミングで定期的に実施してもよく、外部の他のセンサの出力信号やオペレータからの指示を契機にして実施してもよい。例えば、アクティブソーナーの観測データから目標検出処理を実施する場合、音波の送信時から一定期間はごく近距離の物体から反射した音波(雑音)が大きいため、目標検出処理を行わない等がある。
【0021】
ドップラー速度算出手段12は、検出手段11で検出された、目標から発信された波、または目標で反射した波(以下、まとめて発信波と称す)の周波数または波長を測定し、予め保存された参照信号と該周波数または波長とを比較し、その変位からドップラー効果の式を用いて目標のドップラー速度を算出する。
【0022】
目標の発信波の周波数を求める方法としては、例えば観測データをフーリエ変換し、予め設定されたしきい値よりも大きいピーク値の周波数を、目標の発信波の周波数とする方法がある。参照信号は、アクティブレーダーやアクティブソーナーのように、センサから電波や音波等を送信する場合、その周波数や波長は既知である。一方、パッシブレーダーやパッシブソーナー等の場合、参照信号には、例えば船舶のエンジン音等、目標の特徴に対応する発信波の周波数成分のデータベースを予め用意しておけばよい。
【0023】
方位推定手段13は、検出手段11で検出された目標の方位を推定する。目標の方位を推定する方法としては、例えば様々な方位に受信ビームを形成して方位毎の波形情報を記録し、予め設定されたしきい値よりも大きいピーク値を有する方位を目標の真の方位とすればよい。また、目標の方位は、MUSIC(MUltiple SIgnal Classification)法等の周知の方法を用いて推定してもよい。
【0024】
本実施形態では、上下方向を縦方向方位または垂直方向方位と称し、左右方向を横方向方位または水平方向方位と称する。縦方向方位は、迎角や俯角等、他にも様々な呼び方がある。横方向方位は、方位角や水平角等、他にも様々な呼び方がある。レーダーやソーナーでは、縦方向方位または横方向方位にのみ電波や音波を走査させることで所要の機能が十分に達成される場合がある。そのようなレーダーやソーナーでは、電波や音波の到来方向を単に方位あるいは目標方位等と呼ぶことがある。
【0025】
発信時刻推定手段14は、目標から波が発信された時刻を推定する。アクティブレーダーやアクティブソーナーにおいては、センサと目標との位置関係、並びにセンサからの波の送信時刻、センサによる波の受信時刻及び波の伝搬速度から各センサと目標との距離が分かり、送信した波が目標で反射した時刻を推定できる。一方、パッシブレーダーやパッシブソーナーにおいては、例えば複数のセンサで検出された目標の方位が交差する位置に真の目標が存在するとみなし、該真の目標までの距離と波の伝搬速度に基づき、目標から波が発信された時刻を推定できる。
【0026】
方程式構築手段15は、目標の速度成分及びその時間変化成分を求めるための連立方程式を構築する。
【0027】
まず、3次元空間上の目標の速度成分及びその時間変化成分を求める場合を例にして方程式構築手段15の処理について説明する。この場合、目標の速度成分及びその時間変化成分はそれぞれ3つのパラメータで表される。すなわち、未知のパラメータは6であるため、方程式構築手段15は、3次元空間に配置されたN個(Nは6以上)のセンサのうち、少なくとも6つのセンサの波形情報を選択して目標の速度成分及びその時間変化成分を求める。なお、検出対象の目標は1つであり、該目標の加速度は一定とする。複数の目標が検出された場合、検出された目標毎に同様の処理を実行すればよい。
【0028】
以下では、センサの位置を原点とする水平面にx軸及びy軸を設定し、該水平面と鉛直な方向をz軸(上方向が正)とする座標系で考える。
【0029】
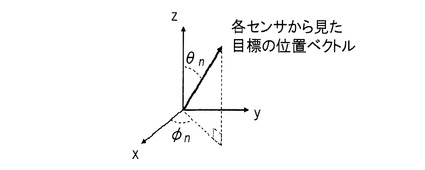
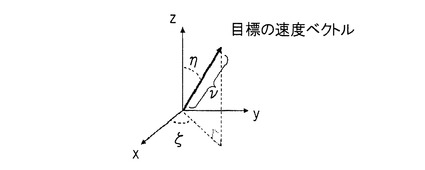
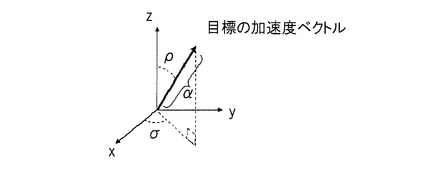
このとき、センサnから見た目標の方位ベクトルを図4aに示すように定義し、目標の速度ベクトルを図4bに示すように定義し、目標の加速度ベクトルを図4cに示すように定義する。すなわち、センサnから見た目標の方位ベクトルは、x軸に対する目標の角度φnと、z軸に対する目標の角度θnとを用いて表す。また、目標の速度ベクトルは、目標の速度の大きさvと、x軸に対する角度ξと、z軸に対する角度ηとを用いて表す。目標の加速度ベクトルは、目標の加速度の大きさaと、x軸に対する角度σと、z軸に対する角度ρとを用いて表す。
【0030】
ここで、センサn(n=1〜6)の波形情報から得られる目標のドップラー速度をVnとすると、目標のドップラーベクトルGは、Vnをドップラーベクトル成分とする
【0031】
【数1】

で表される6次元ベクトルとなる。
【0032】
また、未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルXは
【0033】
【数2】
の6次元ベクトルで表される。なお、式(2)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0034】
センサnに到達する波のうち、目標から発信される波の時刻(発信時刻)をtnとし、
【0035】
【数3】
と定義すると、未知のパラメータ数と同数の成分をから成る目標の方位行列Fは
【0036】
【数4】
の6×6行列で表される。
【0037】
したがって、上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0038】
【数5】
となる。上述したように、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0039】
【数6】
で求めることができる。なお、方程式構築手段15は、式(5)で示した方程式を構築するまでの処理を実施し、式(6)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0040】
ところで、目標の速度の時間微分(加速度)や加速度の時間微分等、より高位の階数の速度の時間微分成分を求める場合も、上記と同様の方法を用いて解くことができる。但し、各速度の時間微分はそれぞれ3次元ベクトルで表されるため、時間微分の階数が一つ増える毎に未知のパラメータ数が3つ増加し、解くべき連立方程式の数も3つ増えることになる。
【0041】
例えば、速度に対するm階の時間微分のベクトルを求める場合、ドップラーベクトルGは
【0042】
【数7】
で表される3(m+1)次元ベクトルとなる。
【0043】
速度ベクトルのm階の時間微分の大きさをam、速度ベクトルのm階の時間微分のz軸に対する角度をηm、速度ベクトルのm階の時間微分のx軸に対する角度をξmとすると、速度パラメータベクトルXは、
【0044】
【数8】
の3(m+1)次元ベクトルで表される。なお、式(8)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0045】
センサnに到達した波のうち、目標から発信される波の時刻(発信時刻)をtnと定義し、速度ベクトルのm階の時間微分を
【0046】
【数9】
と定義すると、目標の方位行列Fは
【0047】
【数10】
の3(m+1)×3(m+1)の行列で表される。
【0048】
したがって、上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0049】
【数11】
となる。ここで、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0050】
【数12】
で求めることができる。なお、方程式構築手段15は、式(11)で示した方程式を構築するまでの処理を実施し、式(12)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0051】
次に、多くのレーダーやソーナーにとって重要な方位である、水平方向に電波、音波、光波等を走査させて目標の速度や加速度を求める例を示す。ここでは、検出対象の目標は1つであり、該目標の加速度が一定の場合を例にして説明する。
【0052】
水平方向にのみ走査する場合、2次元空間上の目標を検出することになるため、目標の速度成分及びその時間変化成分はそれぞれ2つのパラメータで表される。すなわち、未知のパラメータは4であるため、方程式構築手段15は、2次元空間に配置されたN個(Nは4以上)のセンサのうち、少なくとも4つのセンサの波形情報を選択して連立方程式を構築する。なお、x軸の正の向きを北とし、y軸の正の向きを東とし、センサnから見た目標の速度ベクトル及び加速度ベクトルを図5のように定義する。すなわち、y軸に対するセンサnから見た目標の角度(方位)をφnとし、目標の速度ベクトルは、目標の速度の大きさvと、y軸に対する角度(方位)ξとを用いて表す。また、目標の加速度ベクトルは、目標の加速度の大きさaと、y軸に対する角度(方位)ηとを用いて表す。なお、x軸は、波の走査方向(水平方向)、すなわち予め指定された方向の軸を意味し、y軸は、該指定された軸と垂直な方向を意味する。
【0053】
このとき、センサnのから得られる目標のドップラー速度は、センサnに到達した波のうち、目標からの波の発信時刻をtnと定義すると、
【0054】
【数13】
であり、ドップラーベクトルGは
【0055】
【数14】
で表される4次元ベクトルとなる。
【0056】
また、速度パラメータベクトルXは
【0057】
【数15】
の4次元ベクトルで表される。なお、式(15)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0058】
また、
【0059】
【数16】
と定義すると、目標の方位行列Fは
【0060】
【数17】
の4×4行列で表される。
【0061】
上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0062】
【数18】
となる。ここで、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0063】
【数19】
で求めることができる。なお、方程式構築手段15は、式(18)で示した方程式を構築するまでの処理を実施し、式(19)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0064】
このように2次元空間の場合は角度の定義に注意が必要であるが、3次元空間の場合と本質的に同じ方法で目標の速度や該速度の時間変化を求めることができる。また、目標の速度を時間微分する場合、あるいはより高い階数で時間微分する場合も同様である。
【0065】
次に、多くのレーダーやソーナーで目標検出に用いる重要な方位である球面座標における水平方向にのみ電波、音波、光波等を走査させて目標の速度や加速度を求める例を示す。ここでは、検出対象の目標は1つであり、該目標の加速度が一定の場合を例にして説明する。
【0066】
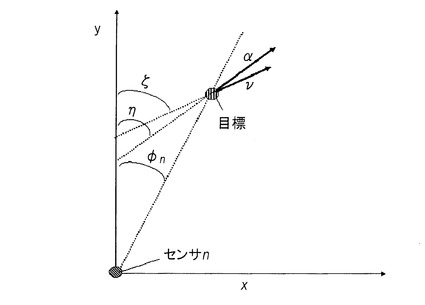
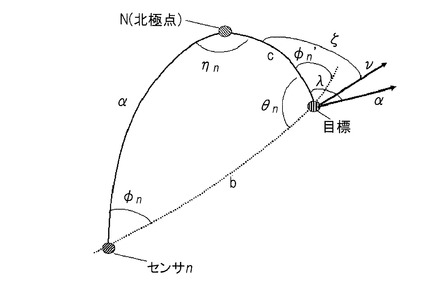
この場合も2次元空間の問題となるため、目標の速度やその時間変化を求めるには、N個(Nは4以上)のセンサのうち、4つのセンサから得られる波形情報を選択して連立方程式を構築すればよい。なお、北極点を基準に、センサnから見た目標の速度ベクトル及び加速度ベクトルを図6のように定義する。
【0067】
図6において、aはセンサnを通る経線、cは目標を通る経線である。bは目標とセンサnを結ぶ大円であり、緯線ではない。φnはセンサから見た目標の方位、φn’は目標から見たセンサnと目標を結ぶ大円と経線との角度となる。
【0068】
また、目標を通る経線と目標とセンサnとを結ぶ大円との角度をθnとし、経線aと経線cの成す角をη、目標の速度ベクトルが経線cと成す角をξ、加速度ベクトルが経線cと成す角をλとする。θnついては、目標の座標とセンサの座標が分かれば球面三角における三角関数の公式を用いて容易に求めることができる。
【0069】
この場合、センサn(n=1〜4)から得られる目標のドップラー速度Vnは、センサnに到達した波のうち、目標から発信される波の発信時刻をtnと定義すると、
【0070】
【数20】
となる。
【0071】
式(20)は、式(13)と同じ構造であり、式(14)〜式(19)と同様に連立方程式を構築して目標の速度及び該目標の時間変化を求めることができる。
【0072】
速度パラメータ推定手段16は、方程式構築手段15で構築された連立方程式を解くことで速度パラメータベクトルXを求め、速度パラメータベクトルXの各成分から目標の速度ベクトルや速度ベクトルの時間変化成分を算出する。連立方程式は、周知のガウスの消去法やLU分解法等を用いて解けばよい。
【0073】
統計パラメータ算出手段17は、全てのセンサの組合せから得られる目標の速度ベクトル及びその時間変化成分の平均値や中央値等の統計値を求め、該統計値を目標の真の速度ベクトル及び真の速度ベクトルの時間変化成分とする。そして、これら目標の真の速度ベクトル及び真の速度ベクトルの時間変化成分を外部の記録表示手段5に出力する。
【0074】
記録表示手段5は、例えばディスプレイを備えたコンピュータで実現される。
【0075】
本実施形態によれば、未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られるドップラー速度を用いて未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、さらに該未知のパラメータ数と同数以上のセンサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成し、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築する。そして、該連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求めることができる。そのため、各探信の度に目標の速度及び該速度の時間変化を取得できる。
(第2の実施の形態)
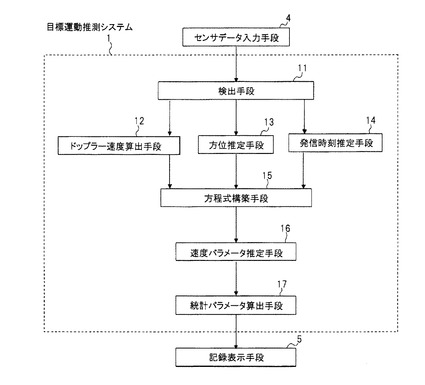
図2は、第2の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0076】
図2に示すように、第2の実施の形態の目標運動推測システム2は、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14、最適方程式構築手段25及び最適速度パラメータ推定手段26を有する。検出手段11には外部のセンサデータ入力手段4で測定された観測データが入力される。最適速度パラメータ推定手段26で算出されたパラメータは外部の記録表示手段5へ出力される。
【0077】
センサデータ入力手段4、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14及び記録表示手段5は、第1の実施の形態と同様であるため、その説明は省略する。
【0078】
図2に示す目標運動推測システム2は、第1の実施の形態と同様に、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現することも可能である。
【0079】
以下では、図2に示す最適方程式構築手段25及び最適速度パラメータ推定手段26の処理について説明する。
【0080】
本実施形態では、最も応用性が高い3次元空間における目標毎の速度及び速度のm階の時間微分まで求める例を示す。したがって、必要なセンサの波形情報の数Nは3(m+1)以上となる。座標や速度ベクトル等の設定方法は第1の実施の形態と同一とする。
【0081】
最適方程式構築手段25は、各センサの波形情報から得られるドップラー速度、発信時刻、目標方位に基づいて算出されるドップラーモーメントをベクトル成分として有するドップラーモーメントベクトルを目標毎に生成する。
【0082】
センサnの波形情報から得られる目標のドップラー速度をVnとし、センサnに到達した目標からの波の発信時刻をtnとし、速度ベクトルのm階の時間微分に対して、式(9)と同様に
【0083】
【数21】
と定義すると、ドップラーモーメントベクトルGは
【0084】
【数22】
で表される3(m+1)+1次元ベクトルとなる。
【0085】
また、最適方程式構築手段25は、各センサの波形情報から得られる、目標の速度の大きさ、目標の速度の縦方向方位及び横方向方位、目標の速度の時間変化成分の大きさ、並びに目標の速度の時間変化成分の縦方向方位及び横方向方位をベクトル成分とする最適速度パラメータベクトルを生成する。あるいは、目標の速度の大きさ、予め指定された軸と垂直な方向に対する速度の方位、速度の時間変化成分の大きさ、並びに予め指定された軸と垂直な方向に対する速度の時間変化成分の方位をベクトル成分とする最適速度パラメータベクトルを生成する。
【0086】
最適速度パラメータベクトルXは、上記式(8)に一つ項が加わり、
【0087】
【数23】
の3(m+1)+1次元ベクトルで表される。なお、式(23)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。また、Dは計算の便宜上設けた変数である。
【0088】
また、最適方程式構築手段25は、センサ毎の波形情報から得られる目標からの波の発信時刻と、目標の方位から算出される、目標の方位を成分として持つ方位モーメント行列を生成する。方位モーメント行列Fは式(21)で示した表記を用いると、
【0089】
【数24】
の3(m+1)+1×3(m+1)+1行列で表される。
【0090】
このとき、解くべき連立方程式は
【0091】
【数25】
となる。ドップラーモーメントベクトルG及び方位モーメント行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。
【0092】
なお、式(25)で示した連立方程式は、
【0093】
【数26】
で定義される尤度関数Lにおいて、
【0094】
【数27】
として得られる最適解である。式(26)に示す尤度関数は一例であり、測定値と理論値との差が最小となるような尤度関数であれば他の式を用いてもよい。
【0095】
最適速度パラメータ推定手段26は、上記連立方程式において、センサデータ入力手段4の波形情報から算出できるドップラーモーメントベクトル及び方位モーメント行列から、未知パラメータである最適速度パラメータベクトルを求め、最適速度パラメータベクトルの各成分から目標の速度ベクトルや速度ベクトルの時間変化成分を算出する。
【0096】
最適速度パラメータ推定手段26は、第1の実施の形態の速度パラメータ推定手段16と同様に、ガウスの消去法やLU分解法等の周知の方法を用いて、目標の速度ベクトルや速度ベクトルの時間変化成分を算出すればよい。最適速度パラメータ推定手段26は、求めた速度ベクトルや速度ベクトルの時間変化成分を外部の記録表示手段5へ出力する。
【0097】
本実施形態によれば、最適方程式構築手段25によりドップラーモーメントベクトルG及び方位モーメント行列Fを生成し、最適速度パラメータ推定手段26によりドップラーモーメントベクトルG及び方位モーメント行列Fから最適速度パラメータベクトルを求めるため、第1の実施の形態のように統計パラメータ算出手段17が無くても、各センサの組み合わせから得られる目標の速度成分やその時間変化成分の平均値等に相当する値が得られる。そのため、第1の実施の形態の目標運動推測システム1よりも簡単な構成で、各探信の度に目標の速度及び該速度の時間変化を取得できる。
(第3の実施の形態)
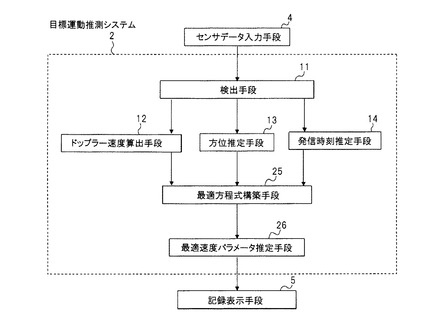
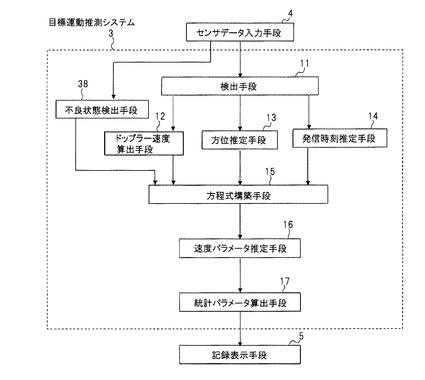
図3は、第3の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0098】
図3示すように、第3の実施の形態の目標運動推測システム3は、図1に示した第1の実施の形態の目標運動推測システム1に不良状態検出手段38を追加した構成である。図3に示す不良状態検出手段38は、図2に示した第2の実施の形態の目標運動推測システム2に追加してもよい。
【0099】
図3に示す目標運動推測システム3は、第1及び第2の実施の形態と同様に、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現してもよい。
【0100】
不良状態検出手段38は、センサデータ入力手段4から各センサの位置を取得し、複数のセンサと目標とが同一直線上に並んでいる場合、あるいは複数のセンサと目標が同一平面内にある場合に不良状態として判定し、不良状態となるセンサの波形情報を除いた連立方程式を方程式構築手段15または最適方程式構築手段25に構築させる。
【0101】
不良状態検出手段38は、例えば各センサと目標とを直線で結び、これらの直線が平行か否かで不良状態であるか否かを判定すればよい。各直線が平行であるか否かは、予め直線どうしの角度の許容範囲を決めておき、その範囲内の角度のときは、対応する直線が平行と見なせばよい。
【0102】
本実施形態によれば、第1または第2の実施の形態と同様の効果に加えて、不良状態検出手段38によって目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサの波形情報を除いて、方程式構築手段15または最適方程式構築手段25に上記連立方程式を構築させるため、目標の速度及び該速度の時間変化の推定精度が向上する。
【符号の説明】
【0103】
1,2,3 目標運動推測システム
4 センサデータ入力手段
5 記録表示手段
11 検出手段
12 ドップラー速度算出手段
13 方位推定手段
14 発信時刻推定手段
15 方程式構築手段
16 速度パラメータ推定手段
17 統計パラメータ算出手段
25 最適方程式構築手段
26 最適速度パラメータ推定手段
38 不良状態検出手段
【技術分野】
【0001】
本発明は、受信した電波、音波、光波等から検出した目標を追尾・追跡し、該目標の運動パラメータを推測する目標運動推測システム及び方法に関し、特に目標の速度及び該速度の時間変化を推測する目標運動推測システム及び方法に関する。
【背景技術】
【0002】
レーダー(Radar:Radio detecting and ranging)、ソーナー(Sonar:Sound navigation and ranging)、ライダー(Lidar:Light detecting and ranging)等を用いて目標を検出して追跡する方法としては、例えば特許文献1に記載されたMHT(Multiple Hypothesis Tracking:多重仮説追尾)法が知られている。また、目標の誤検出や検出漏れの頻度が低い場合は、周知のカルマンフィルタやパーティクルフィルタを用いることで、目標を検出して追跡することが可能である。
【0003】
上記の何れの方法においても、複数回の探信で得られる目標の位置及び該位置の時間変化から該目標の速度や該速度の時間変化(加速度等)を推測できる。さらに、目標の位置だけではなく、受信した電波、音波、光波等の波の情報から求まる目標のドップラー速度を用いることで、より高精度に目標の速度や該速度の時間変化を推測できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009‐192550号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したように、従来の方法ではカルマンフィルタやパーティクルフィルタ等の時系列フィルタを用いるため、目標の速度や該速度の時間変化を求めるためには複数回の探信が必要となる。そのため、目標の速度や加速度が大きいと、探信間隔によっては目標の速度や該速度の時間変化の推定精度が低下する可能性がある。
【0006】
また、カルマンフィルタやパーティクルフィルタの処理で目標のドップラー速度を利用する場合、ドップラー速度から速度ベクトルへの非線形変換において線形近似を用いることになるため、目標の速度の推定精度が大きく低下することがある。カルマンフィルタを利用するMHT法についても同様である。
【0007】
本発明は上述したような背景技術が有する問題点を解決するためになされたものであり、各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため本発明の目標運動推測システムは、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出する速度パラメータ推定手段と、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する統計パラメータ算出手段と、
を有する。
【0009】
または、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する最適速度パラメータ推定手段と、
を有する。
【0010】
一方、本発明の目標運動推測方法は、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
コンピュータが、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、
前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出し、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する方法である。
【0011】
または、少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、
前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する方法である。
【発明の効果】
【0012】
本発明によれば、各探信の度に目標の速度及び該速度の時間変化を取得できる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図2】第2の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図3】第3の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【図4a】3次元空間における目標の方位ベクトルの定義例を示す模式図である。
【図4b】3次元空間における目標の速度ベクトルの定義例を示す模式図である。
【図4c】3次元空間における目標の加速度ベクトルの定義例を示す模式図である。
【図5】2次元平面座標における目標の速度ベクトル及び加速度ベクトルの定義例を示す模式図である。
【図6】2次元球面座標における目標の速度ベクトル及び加速度ベクトルの定義例を示す模式図である。
【発明を実施するための形態】
【0014】
次に本発明について図面を用いて説明する。
(第1の実施の形態)
図1は、第1の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0015】
図1に示すように、第1の実施の形態の目標運動推測システム1は、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14、方程式構築手段15、速度パラメータ推定手段16及び統計パラメータ算出手段17を有する。
【0016】
図1に示す目標運動推測システム1は、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現することも可能である。目標運動推測システム1には、センサデータ入力手段4で観測された電波、音波、光波等の観測データが入力される。観測データは、目標運動推測システム1が備える検出手段11へ入力される。また、目標運動推測システム1で推測された目標の速度や該速度の時間変化は記録表示手段5へ出力され、記録表示手段5で表示される。
【0017】
センサデータ入力手段4は、到来する電波、音波、光波等を受信して電気信号に変換する、一つまたは複数のセンサを備えたレーダー、ソーナー、ライダー等である。センサデータ入力手段4の観測データには、目標から発せられた電波、音波、光波等の波長、振幅、位相、変調方式等が時系列に変動したデータである波形情報が含まれる。
【0018】
複数のセンサを備えたセンサデータ入力手段4では、一般に該複数のセンサが直線上に半波長間隔(検出波長の半波長間隔)で配置されることが多い。本実施形態では、センサデータ入力手段4が備えるセンサは、リング状、球面状、結晶格子形状と似た立体格子状等、どのよう形状で配置されていてもよい。また、各センサの感度特性や波長特性は同じであってもよく、異なっていてもよい。また、本実施形態では、電波、音波、光波等の波の送信源が1つであり、波を受信するセンサが複数となるマルチスタティック構成を想定しているが、周知の周波数分割やコード分割等を用いて各送信波どうしの干渉を避けることができれば、波の送信源は複数であってもよい。
【0019】
検出手段11は、センサデータ入力手段4から入力された観測データに対して追跡対象となる目標を検出するための目標検出処理を実施し、その検出結果をドップラー速度算出手段12、方位推定手段13及び発信時刻推定手段14へそれぞれ出力する。目標検出処理によって検出される目標の数は、0の場合、1の場合、あるいは複数の場合がある。検出手段11は、センサデータ入力手段4から入力された観測データに目標検出処理を直接実施してもよく、センサデータ入力手段4から入力された観測データを所定の直交関数で変換(例えば、フーリエ変換等)した後、目標検出処理を実施してもよい。
【0020】
検出手段11で実施する目標検出処理には、周知の目標検出方法を用いればよい。最も単純な方法としては、例えばセンサから送信された波が目標で反射され、その反射波(エコー)を受信することで目標を検出する方法がある。その場合、送信波の情報(周波数または波長)をテンプレートに用いて受信波との相関を取り、相関係数が予め設定したしきい値よりも大きい場合に目標であると判定する方法がある。また、様々な雑音環境下で目標から発信される波の情報を予め登録しておき、該登録した波の情報をテンプレートに用いて受信波との相関を取る方法、あるいは周知のニューラルネットワーク、サポートベクターマシン、アダブースト等の機械学習アルゴリズムを用いて学習することで目標から発信される波のテンプレートを作成し、該テンプレートに基づいて受信波をパターン認識することで目標が存在するか否かを判定する方法を用いてもよい。目標検出処理は、センサデータ入力手段4から観測データが入力される毎に実施してもよく、予め設定されたタイミングで定期的に実施してもよく、外部の他のセンサの出力信号やオペレータからの指示を契機にして実施してもよい。例えば、アクティブソーナーの観測データから目標検出処理を実施する場合、音波の送信時から一定期間はごく近距離の物体から反射した音波(雑音)が大きいため、目標検出処理を行わない等がある。
【0021】
ドップラー速度算出手段12は、検出手段11で検出された、目標から発信された波、または目標で反射した波(以下、まとめて発信波と称す)の周波数または波長を測定し、予め保存された参照信号と該周波数または波長とを比較し、その変位からドップラー効果の式を用いて目標のドップラー速度を算出する。
【0022】
目標の発信波の周波数を求める方法としては、例えば観測データをフーリエ変換し、予め設定されたしきい値よりも大きいピーク値の周波数を、目標の発信波の周波数とする方法がある。参照信号は、アクティブレーダーやアクティブソーナーのように、センサから電波や音波等を送信する場合、その周波数や波長は既知である。一方、パッシブレーダーやパッシブソーナー等の場合、参照信号には、例えば船舶のエンジン音等、目標の特徴に対応する発信波の周波数成分のデータベースを予め用意しておけばよい。
【0023】
方位推定手段13は、検出手段11で検出された目標の方位を推定する。目標の方位を推定する方法としては、例えば様々な方位に受信ビームを形成して方位毎の波形情報を記録し、予め設定されたしきい値よりも大きいピーク値を有する方位を目標の真の方位とすればよい。また、目標の方位は、MUSIC(MUltiple SIgnal Classification)法等の周知の方法を用いて推定してもよい。
【0024】
本実施形態では、上下方向を縦方向方位または垂直方向方位と称し、左右方向を横方向方位または水平方向方位と称する。縦方向方位は、迎角や俯角等、他にも様々な呼び方がある。横方向方位は、方位角や水平角等、他にも様々な呼び方がある。レーダーやソーナーでは、縦方向方位または横方向方位にのみ電波や音波を走査させることで所要の機能が十分に達成される場合がある。そのようなレーダーやソーナーでは、電波や音波の到来方向を単に方位あるいは目標方位等と呼ぶことがある。
【0025】
発信時刻推定手段14は、目標から波が発信された時刻を推定する。アクティブレーダーやアクティブソーナーにおいては、センサと目標との位置関係、並びにセンサからの波の送信時刻、センサによる波の受信時刻及び波の伝搬速度から各センサと目標との距離が分かり、送信した波が目標で反射した時刻を推定できる。一方、パッシブレーダーやパッシブソーナーにおいては、例えば複数のセンサで検出された目標の方位が交差する位置に真の目標が存在するとみなし、該真の目標までの距離と波の伝搬速度に基づき、目標から波が発信された時刻を推定できる。
【0026】
方程式構築手段15は、目標の速度成分及びその時間変化成分を求めるための連立方程式を構築する。
【0027】
まず、3次元空間上の目標の速度成分及びその時間変化成分を求める場合を例にして方程式構築手段15の処理について説明する。この場合、目標の速度成分及びその時間変化成分はそれぞれ3つのパラメータで表される。すなわち、未知のパラメータは6であるため、方程式構築手段15は、3次元空間に配置されたN個(Nは6以上)のセンサのうち、少なくとも6つのセンサの波形情報を選択して目標の速度成分及びその時間変化成分を求める。なお、検出対象の目標は1つであり、該目標の加速度は一定とする。複数の目標が検出された場合、検出された目標毎に同様の処理を実行すればよい。
【0028】
以下では、センサの位置を原点とする水平面にx軸及びy軸を設定し、該水平面と鉛直な方向をz軸(上方向が正)とする座標系で考える。
【0029】
このとき、センサnから見た目標の方位ベクトルを図4aに示すように定義し、目標の速度ベクトルを図4bに示すように定義し、目標の加速度ベクトルを図4cに示すように定義する。すなわち、センサnから見た目標の方位ベクトルは、x軸に対する目標の角度φnと、z軸に対する目標の角度θnとを用いて表す。また、目標の速度ベクトルは、目標の速度の大きさvと、x軸に対する角度ξと、z軸に対する角度ηとを用いて表す。目標の加速度ベクトルは、目標の加速度の大きさaと、x軸に対する角度σと、z軸に対する角度ρとを用いて表す。
【0030】
ここで、センサn(n=1〜6)の波形情報から得られる目標のドップラー速度をVnとすると、目標のドップラーベクトルGは、Vnをドップラーベクトル成分とする
【0031】
【数1】
で表される6次元ベクトルとなる。
【0032】
また、未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルXは
【0033】
【数2】
の6次元ベクトルで表される。なお、式(2)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0034】
センサnに到達する波のうち、目標から発信される波の時刻(発信時刻)をtnとし、
【0035】
【数3】
と定義すると、未知のパラメータ数と同数の成分をから成る目標の方位行列Fは
【0036】
【数4】
の6×6行列で表される。
【0037】
したがって、上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0038】
【数5】
となる。上述したように、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0039】
【数6】
で求めることができる。なお、方程式構築手段15は、式(5)で示した方程式を構築するまでの処理を実施し、式(6)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0040】
ところで、目標の速度の時間微分(加速度)や加速度の時間微分等、より高位の階数の速度の時間微分成分を求める場合も、上記と同様の方法を用いて解くことができる。但し、各速度の時間微分はそれぞれ3次元ベクトルで表されるため、時間微分の階数が一つ増える毎に未知のパラメータ数が3つ増加し、解くべき連立方程式の数も3つ増えることになる。
【0041】
例えば、速度に対するm階の時間微分のベクトルを求める場合、ドップラーベクトルGは
【0042】
【数7】
で表される3(m+1)次元ベクトルとなる。
【0043】
速度ベクトルのm階の時間微分の大きさをam、速度ベクトルのm階の時間微分のz軸に対する角度をηm、速度ベクトルのm階の時間微分のx軸に対する角度をξmとすると、速度パラメータベクトルXは、
【0044】
【数8】
の3(m+1)次元ベクトルで表される。なお、式(8)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0045】
センサnに到達した波のうち、目標から発信される波の時刻(発信時刻)をtnと定義し、速度ベクトルのm階の時間微分を
【0046】
【数9】
と定義すると、目標の方位行列Fは
【0047】
【数10】
の3(m+1)×3(m+1)の行列で表される。
【0048】
したがって、上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0049】
【数11】
となる。ここで、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0050】
【数12】
で求めることができる。なお、方程式構築手段15は、式(11)で示した方程式を構築するまでの処理を実施し、式(12)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0051】
次に、多くのレーダーやソーナーにとって重要な方位である、水平方向に電波、音波、光波等を走査させて目標の速度や加速度を求める例を示す。ここでは、検出対象の目標は1つであり、該目標の加速度が一定の場合を例にして説明する。
【0052】
水平方向にのみ走査する場合、2次元空間上の目標を検出することになるため、目標の速度成分及びその時間変化成分はそれぞれ2つのパラメータで表される。すなわち、未知のパラメータは4であるため、方程式構築手段15は、2次元空間に配置されたN個(Nは4以上)のセンサのうち、少なくとも4つのセンサの波形情報を選択して連立方程式を構築する。なお、x軸の正の向きを北とし、y軸の正の向きを東とし、センサnから見た目標の速度ベクトル及び加速度ベクトルを図5のように定義する。すなわち、y軸に対するセンサnから見た目標の角度(方位)をφnとし、目標の速度ベクトルは、目標の速度の大きさvと、y軸に対する角度(方位)ξとを用いて表す。また、目標の加速度ベクトルは、目標の加速度の大きさaと、y軸に対する角度(方位)ηとを用いて表す。なお、x軸は、波の走査方向(水平方向)、すなわち予め指定された方向の軸を意味し、y軸は、該指定された軸と垂直な方向を意味する。
【0053】
このとき、センサnのから得られる目標のドップラー速度は、センサnに到達した波のうち、目標からの波の発信時刻をtnと定義すると、
【0054】
【数13】
であり、ドップラーベクトルGは
【0055】
【数14】
で表される4次元ベクトルとなる。
【0056】
また、速度パラメータベクトルXは
【0057】
【数15】
の4次元ベクトルで表される。なお、式(15)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。
【0058】
また、
【0059】
【数16】
と定義すると、目標の方位行列Fは
【0060】
【数17】
の4×4行列で表される。
【0061】
上記ドップラーベクトルG、速度パラメータベクトルX及び方位行列Fから、解くべき連立方程式は
【0062】
【数18】
となる。ここで、ドップラーベクトルG及び方位行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。したがって、方位行列Fが逆行列を持つなら、速度パラメータベクトルXは
【0063】
【数19】
で求めることができる。なお、方程式構築手段15は、式(18)で示した方程式を構築するまでの処理を実施し、式(19)で示した方程式を解くのは後段の速度パラメータ推定手段16である。
【0064】
このように2次元空間の場合は角度の定義に注意が必要であるが、3次元空間の場合と本質的に同じ方法で目標の速度や該速度の時間変化を求めることができる。また、目標の速度を時間微分する場合、あるいはより高い階数で時間微分する場合も同様である。
【0065】
次に、多くのレーダーやソーナーで目標検出に用いる重要な方位である球面座標における水平方向にのみ電波、音波、光波等を走査させて目標の速度や加速度を求める例を示す。ここでは、検出対象の目標は1つであり、該目標の加速度が一定の場合を例にして説明する。
【0066】
この場合も2次元空間の問題となるため、目標の速度やその時間変化を求めるには、N個(Nは4以上)のセンサのうち、4つのセンサから得られる波形情報を選択して連立方程式を構築すればよい。なお、北極点を基準に、センサnから見た目標の速度ベクトル及び加速度ベクトルを図6のように定義する。
【0067】
図6において、aはセンサnを通る経線、cは目標を通る経線である。bは目標とセンサnを結ぶ大円であり、緯線ではない。φnはセンサから見た目標の方位、φn’は目標から見たセンサnと目標を結ぶ大円と経線との角度となる。
【0068】
また、目標を通る経線と目標とセンサnとを結ぶ大円との角度をθnとし、経線aと経線cの成す角をη、目標の速度ベクトルが経線cと成す角をξ、加速度ベクトルが経線cと成す角をλとする。θnついては、目標の座標とセンサの座標が分かれば球面三角における三角関数の公式を用いて容易に求めることができる。
【0069】
この場合、センサn(n=1〜4)から得られる目標のドップラー速度Vnは、センサnに到達した波のうち、目標から発信される波の発信時刻をtnと定義すると、
【0070】
【数20】
となる。
【0071】
式(20)は、式(13)と同じ構造であり、式(14)〜式(19)と同様に連立方程式を構築して目標の速度及び該目標の時間変化を求めることができる。
【0072】
速度パラメータ推定手段16は、方程式構築手段15で構築された連立方程式を解くことで速度パラメータベクトルXを求め、速度パラメータベクトルXの各成分から目標の速度ベクトルや速度ベクトルの時間変化成分を算出する。連立方程式は、周知のガウスの消去法やLU分解法等を用いて解けばよい。
【0073】
統計パラメータ算出手段17は、全てのセンサの組合せから得られる目標の速度ベクトル及びその時間変化成分の平均値や中央値等の統計値を求め、該統計値を目標の真の速度ベクトル及び真の速度ベクトルの時間変化成分とする。そして、これら目標の真の速度ベクトル及び真の速度ベクトルの時間変化成分を外部の記録表示手段5に出力する。
【0074】
記録表示手段5は、例えばディスプレイを備えたコンピュータで実現される。
【0075】
本実施形態によれば、未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られるドップラー速度を用いて未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、さらに該未知のパラメータ数と同数以上のセンサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成し、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築する。そして、該連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求めることができる。そのため、各探信の度に目標の速度及び該速度の時間変化を取得できる。
(第2の実施の形態)
図2は、第2の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0076】
図2に示すように、第2の実施の形態の目標運動推測システム2は、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14、最適方程式構築手段25及び最適速度パラメータ推定手段26を有する。検出手段11には外部のセンサデータ入力手段4で測定された観測データが入力される。最適速度パラメータ推定手段26で算出されたパラメータは外部の記録表示手段5へ出力される。
【0077】
センサデータ入力手段4、検出手段11、ドップラー速度算出手段12、方位推定手段13、発信時刻推定手段14及び記録表示手段5は、第1の実施の形態と同様であるため、その説明は省略する。
【0078】
図2に示す目標運動推測システム2は、第1の実施の形態と同様に、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現することも可能である。
【0079】
以下では、図2に示す最適方程式構築手段25及び最適速度パラメータ推定手段26の処理について説明する。
【0080】
本実施形態では、最も応用性が高い3次元空間における目標毎の速度及び速度のm階の時間微分まで求める例を示す。したがって、必要なセンサの波形情報の数Nは3(m+1)以上となる。座標や速度ベクトル等の設定方法は第1の実施の形態と同一とする。
【0081】
最適方程式構築手段25は、各センサの波形情報から得られるドップラー速度、発信時刻、目標方位に基づいて算出されるドップラーモーメントをベクトル成分として有するドップラーモーメントベクトルを目標毎に生成する。
【0082】
センサnの波形情報から得られる目標のドップラー速度をVnとし、センサnに到達した目標からの波の発信時刻をtnとし、速度ベクトルのm階の時間微分に対して、式(9)と同様に
【0083】
【数21】
と定義すると、ドップラーモーメントベクトルGは
【0084】
【数22】
で表される3(m+1)+1次元ベクトルとなる。
【0085】
また、最適方程式構築手段25は、各センサの波形情報から得られる、目標の速度の大きさ、目標の速度の縦方向方位及び横方向方位、目標の速度の時間変化成分の大きさ、並びに目標の速度の時間変化成分の縦方向方位及び横方向方位をベクトル成分とする最適速度パラメータベクトルを生成する。あるいは、目標の速度の大きさ、予め指定された軸と垂直な方向に対する速度の方位、速度の時間変化成分の大きさ、並びに予め指定された軸と垂直な方向に対する速度の時間変化成分の方位をベクトル成分とする最適速度パラメータベクトルを生成する。
【0086】
最適速度パラメータベクトルXは、上記式(8)に一つ項が加わり、
【0087】
【数23】
の3(m+1)+1次元ベクトルで表される。なお、式(23)の中央のベクトルは、式の見通しをよくするために各ベクトル成分を簡略化して示したものである。また、Dは計算の便宜上設けた変数である。
【0088】
また、最適方程式構築手段25は、センサ毎の波形情報から得られる目標からの波の発信時刻と、目標の方位から算出される、目標の方位を成分として持つ方位モーメント行列を生成する。方位モーメント行列Fは式(21)で示した表記を用いると、
【0089】
【数24】
の3(m+1)+1×3(m+1)+1行列で表される。
【0090】
このとき、解くべき連立方程式は
【0091】
【数25】
となる。ドップラーモーメントベクトルG及び方位モーメント行列Fは各センサの波形情報から得られる値であり、未知のパラメータはXである。
【0092】
なお、式(25)で示した連立方程式は、
【0093】
【数26】
で定義される尤度関数Lにおいて、
【0094】
【数27】
として得られる最適解である。式(26)に示す尤度関数は一例であり、測定値と理論値との差が最小となるような尤度関数であれば他の式を用いてもよい。
【0095】
最適速度パラメータ推定手段26は、上記連立方程式において、センサデータ入力手段4の波形情報から算出できるドップラーモーメントベクトル及び方位モーメント行列から、未知パラメータである最適速度パラメータベクトルを求め、最適速度パラメータベクトルの各成分から目標の速度ベクトルや速度ベクトルの時間変化成分を算出する。
【0096】
最適速度パラメータ推定手段26は、第1の実施の形態の速度パラメータ推定手段16と同様に、ガウスの消去法やLU分解法等の周知の方法を用いて、目標の速度ベクトルや速度ベクトルの時間変化成分を算出すればよい。最適速度パラメータ推定手段26は、求めた速度ベクトルや速度ベクトルの時間変化成分を外部の記録表示手段5へ出力する。
【0097】
本実施形態によれば、最適方程式構築手段25によりドップラーモーメントベクトルG及び方位モーメント行列Fを生成し、最適速度パラメータ推定手段26によりドップラーモーメントベクトルG及び方位モーメント行列Fから最適速度パラメータベクトルを求めるため、第1の実施の形態のように統計パラメータ算出手段17が無くても、各センサの組み合わせから得られる目標の速度成分やその時間変化成分の平均値等に相当する値が得られる。そのため、第1の実施の形態の目標運動推測システム1よりも簡単な構成で、各探信の度に目標の速度及び該速度の時間変化を取得できる。
(第3の実施の形態)
図3は、第3の実施の形態の目標運動推測システムの一構成例を示すブロック図である。
【0098】
図3示すように、第3の実施の形態の目標運動推測システム3は、図1に示した第1の実施の形態の目標運動推測システム1に不良状態検出手段38を追加した構成である。図3に示す不良状態検出手段38は、図2に示した第2の実施の形態の目標運動推測システム2に追加してもよい。
【0099】
図3に示す目標運動推測システム3は、第1及び第2の実施の形態と同様に、D/A変換器、A/D変換器、各種の論理回路を含むLSI等で実現してもよく、プログラムにしたがって処理を実行するCPUを備えた情報処理装置(コンピュータ)で実現してもよい。
【0100】
不良状態検出手段38は、センサデータ入力手段4から各センサの位置を取得し、複数のセンサと目標とが同一直線上に並んでいる場合、あるいは複数のセンサと目標が同一平面内にある場合に不良状態として判定し、不良状態となるセンサの波形情報を除いた連立方程式を方程式構築手段15または最適方程式構築手段25に構築させる。
【0101】
不良状態検出手段38は、例えば各センサと目標とを直線で結び、これらの直線が平行か否かで不良状態であるか否かを判定すればよい。各直線が平行であるか否かは、予め直線どうしの角度の許容範囲を決めておき、その範囲内の角度のときは、対応する直線が平行と見なせばよい。
【0102】
本実施形態によれば、第1または第2の実施の形態と同様の効果に加えて、不良状態検出手段38によって目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサの波形情報を除いて、方程式構築手段15または最適方程式構築手段25に上記連立方程式を構築させるため、目標の速度及び該速度の時間変化の推定精度が向上する。
【符号の説明】
【0103】
1,2,3 目標運動推測システム
4 センサデータ入力手段
5 記録表示手段
11 検出手段
12 ドップラー速度算出手段
13 方位推定手段
14 発信時刻推定手段
15 方程式構築手段
16 速度パラメータ推定手段
17 統計パラメータ算出手段
25 最適方程式構築手段
26 最適速度パラメータ推定手段
38 不良状態検出手段
【特許請求の範囲】
【請求項1】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出する速度パラメータ推定手段と、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する統計パラメータ算出手段と、
を有する目標運動推測システム。
【請求項2】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する最適速度パラメータ推定手段と、
を有する目標運動推測システム。
【請求項3】
前記センサの位置を取得し、前記目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサから得られる波形情報を除いて前記連立方程式を構築させる不良状態検出手段を有する請求項1または2記載の目標運動推測システム。
【請求項4】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
コンピュータが、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、
前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出し、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する目標運動推測方法。
【請求項5】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、
前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する目標運動推測方法。
【請求項6】
前記センサの位置を取得し、前記目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサから得られる波形情報を除いて前記連立方程式を構築させる請求項4または5記載の目標運動推測方法。
【請求項1】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出する速度パラメータ推定手段と、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する統計パラメータ算出手段と、
を有する目標運動推測システム。
【請求項2】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測する目標運動推測システムであって、
前記波形情報から前記目標を検出する検出手段と、
前記検出手段で検出された前記目標のドップラー速度を算出するドップラー速度算出手段と、
前記検出手段で検出された前記目標の方位を推定する方位推定手段と、
前記検出手段で検出された前記目標から波が発信された時刻を推定する発信時刻推定手段と、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築する方程式構築手段と、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する最適速度パラメータ推定手段と、
を有する目標運動推測システム。
【請求項3】
前記センサの位置を取得し、前記目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサから得られる波形情報を除いて前記連立方程式を構築させる不良状態検出手段を有する請求項1または2記載の目標運動推測システム。
【請求項4】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
コンピュータが、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位行列を生成し、
前記速度パラメータベクトルを前記ドップラーベクトルと前記方位行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記速度パラメータベクトルを求め、該速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出し、
前記センサの組み合わせ毎に得られる速度及び該速度の時間変化の統計値を算出し、該統計値を前記目標の真の速度成分及び真の速度の時間変化成分として出力する目標運動推測方法。
【請求項5】
少なくとも1つのセンサを備え、該センサで得られる目標から発せられた波の時系列な変動を示す波形情報に基づき該目標の運動パラメータを推測するための目標運動推測方法であって、
前記波形情報から前記目標を検出し、
前記検出された前記目標のドップラー速度を算出し、
前記検出された前記目標の方位を推定し、
前記検出された前記目標から波が発信された時刻を推定し、
未知のパラメータである前記目標の速度成分及びその時間変化成分から成る最適速度パラメータベクトルを生成し、
前記未知のパラメータの数と同数以上の前記センサの観測データから得られるドップラー速度を用いて前記未知のパラメータ数と同数の成分を有するドップラーモーメントベクトルを生成し、
前記未知のパラメータ数と同数以上の前記センサの観測データから得られる前記目標の方位及び該目標からの波の発信時刻を用いて前記未知のパラメータ数と同数の成分を有する方位モーメント行列を生成し、
前記最適速度パラメータベクトルを前記ドップラーモーメントベクトルと前記方位モーメント行列の乗算結果で示す連立方程式を構築し、
前記連立方程式を解くことで前記最適速度パラメータベクトルを求め、該最適速度パラメータベクトルの各ベクトル成分から目標の速度成分及び該速度の時間変化成分を算出して出力する目標運動推測方法。
【請求項6】
前記センサの位置を取得し、前記目標と同一直線上に並んでいるセンサ、あるいは目標に対して同一平面内にあるセンサから得られる波形情報を除いて前記連立方程式を構築させる請求項4または5記載の目標運動推測方法。
【図1】

【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図5】
【図6】
【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図5】
【図6】
【公開番号】特開2013−44602(P2013−44602A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181733(P2011−181733)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]