
目標類別装置及び目標類別方法
【課題】 距離の異なる複数の目標を観測する場合、距離によって観測点間での目標に対する入射角の変化が異なるため、入射角の変化が大きくなりすぎるとクラッタ信号だけでなく目標信号の強度も低下してしまうという。
【解決手段】 目標までの距離に応じて目標レンジの切出し処理に利用する観測領域を設定する処理領域設定部を備え、観測領域内で取得した観測信号をデータベースから抽出し、抽出した観測信号を用いて目標の類別処理を行うようにした。処理領域設定部は、目標と観測信号を取得した自己位置のなす角度に基づき、観測領域を設定するようにした。
【解決手段】 目標までの距離に応じて目標レンジの切出し処理に利用する観測領域を設定する処理領域設定部を備え、観測領域内で取得した観測信号をデータベースから抽出し、抽出した観測信号を用いて目標の類別処理を行うようにした。処理領域設定部は、目標と観測信号を取得した自己位置のなす角度に基づき、観測領域を設定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、検出した目標を類別可能な目標類別装置に関するものである。
【背景技術】
【0002】
航空機に搭載したレーダ装置では、上空から電波を送受信することによって地表面や海面付近の観測を行い、地表面や海面付近に存在する目標の検出を行う。この種のレーダ装置で地表面や海面付近を観測すると、一般に地表面や海面からの強いエコーが受信される。それぞれ「グラウンドクラッタ」や、「シークラッタ」と呼ぶ。ここでは、グラウンドクラッタやシークラッタのように背景からのエコーを、総称して単に「クラッタ」と呼ぶ。従って、目標類別を行うためにはクラッタの中から目標のエコーを検出し、類別処理を行う必要がある。なお、目標からのエコーを「目標信号」と呼ぶ。
【0003】
目標類別を行うレーダ装置に関する技術として、高分解能なレンジプロフィールや偏波特性を用いて類別を行うレーダ装置が開示されている(例えば、特許文献1参照)。
また、移動目標に対して目標を追尾することによって、目標の運動状態から目標を類別するレーダ装置が開示されている(例えば、特許文献2参照)。
【0004】
目標のレンジプロフィールを用いて類別を行う場合、受信したレーダ信号の中から目標が存在するレンジプロフィールの領域を抽出する必要がある。この際に航空機から地上を観測するレーダ装置では、クラッタ信号の影響を受けるため、目標領域の抽出が困難となる。
【0005】
この課題を解決する方式として電波の入射角による信号の変化が、クラッタ信号と目標信号で異なることを利用する方式が提案されている(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−257931号公報(図1)。
【特許文献2】特開2002−341022号公報(図1)。
【特許文献3】特願2010−090190号公報(図12)。
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら特許文献3に示される従来のレーダ装置では、距離の異なる複数の目標を観測する場合、自分と各々の目標との距離によって、移動前後での観測点間での目標に対する入射角の変化が異なってしまう。すなわち、距離の遠い目標に対しては入射角の変化は小さいが、距離の近い他の目標に対しては入射角の変化が大きくなる。
入射角の変化が大きくなりすぎると、クラッタ信号だけでなく、目標信号の強度も低下してしまい、目標の抽出が困難になるという課題があった。
【0008】
この発明は係る課題を解決するためになされたものであり、目標までの距離に応じて、クラッタ信号の抑圧処理に利用する観測点数(利用する観測位置)を制御することで、目標レンジの切出し処理を行う際の目標信号の低下を抑え、距離の異なる複数の目標に対しても同時に目標レンジの切出し処理が可能なレーダ装置を提供する。
【課題を解決するための手段】
【0009】
この発明の目標類別装置は、電波を送受信して観測信号を取得する送受信部と、自己位置を標定する自己位置標定部と、前記自己位置と、前記自己位置で取得された観測信号とが関連付けされたデータを保存するデータ保存部と、前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する目標検出部と、前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する処理領域設定部と、前記観測領域内で取得した前記観測信号を前記データ保存部から抽出し、抽出した観測信号を用いて目標の類別処理を行う処理部とを備える。
【発明の効果】
【0010】
この発明の目標類別装置によれば、目標までの距離の異なる複数目標に対しても、精度良く、同時に目標レンジの切出し処理を行うことができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態1に係る目標類別装置の構成を示すブロック図である。
【図2】実施の形態1に係る目標類別装置の観測点間の距離と観測位置と目標のなす角の関係を示した図である。
【図3】実施の形態2に係る目標類別装置の構成を示すブロック図である。
【図4】実施の形態3に係る目標類別装置の構成を示すブロック図である。
【図5】従来のレーダ装置と目標との関係を図式的に示す説明図である。
【図6】従来の反射信号のビームパターンを示す説明図である。
【発明を実施するための形態】
【0012】
ここでは、特許文献3に記載された従来のレーダ装置の概略動作について最初に説明した後、本発明に係る目標類別装置の実施の形態について説明する。
【0013】
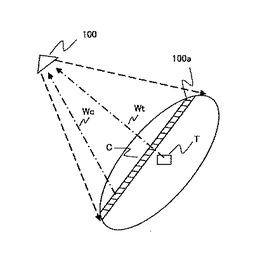
図5は、特許文献3に記載されたレーダ装置と目標との関係を図式的に示した説明図である。図5において、航空機等に搭載されたレーダ装置100は、十分なレンジビン分解能を有するものの、アジマス分解能が低いものとし、アジマス方向(すなわち、分解能セル100aの幅方向)に移動しながら複数回の観測を行い、受信信号を得るものとする。
【0014】
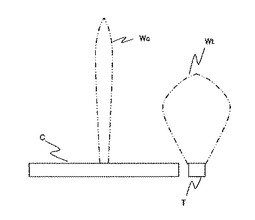
図6は、目標Tと、クラッタCの各々で反射された反射信号のビームパターンを示す説明図である。反射信号Wt、反射信号Wcは、レーダ装置100から放射された電波が目標TとクラッタCで反射されるビームパターンの一例を示した図ある。
この反射信号Wt、反射信号Wcについては、目標TとクラッタCとについて、レーダ装置100から放射された電波が目標TおよびクラッタCで再放射される場合のビームパターンとして考えることができる。図6の例では、反射信号WcはクラッタCから再放射される場合の仮想的なビームパターンを表わし、反射信号Wtは目標Tから再放射される際の仮想的なビームパターンを表わしている。
【0015】
レーダ装置100のビームパターンは、電波が放射される開口面が大きいほど先の鋭い形状となることが知られている。
クラッタCに対しては、アジマス方向に広がった電波がそのまま照射されるため、クラッタCから再放射される電波(反射信号Wc)の仮想的な開口面はアジマス分解能と等価である。
【0016】
一方、目標Tの照射面は、目標Tの大きさによって決定する。
一般的に、目標サイズはアジマス分解能(分解能セル100aの幅方向)に比べて十分小さいので、目標Tの仮想的な開口面は、クラッタCの開口面に比べて小さくなる。
したがって、図6に示すように、クラッタCで再放射される電波(反射信号Wc)と目標Tで再照射される電波(反射信号Wt)との各ビームパターンを比較すると、目標Tの反射信号WtよりもクラッタCの反射信号Wcの方が先鋭化されたビームパターンとなる。
【0017】
図6の反射信号Wcのように先鋭化されたビームパターンでは、アジマス角がわずかに変化するだけでも、観測される信号が大きく変化する。
一方、反射信号Wtのようにビームパターンが先鋭化されておらず比較的ブロードな形状の場合には、アジマス角がわずかに変化した程度では観測される信号の変化は小さい。
【0018】
このように、異なるアジマス角で観測した信号間では目標Tの反射信号Wtに比べてクラッタCの反射信号Wcの相関が低くなる性質を利用し、異なるアジマス角で観測した複数の観測信号を処理することにより、クラッタCの反射信号Wcを抑圧することが可能である。
【0019】
しかしながら従来のレーダ装置では、先に述べたように、目標までの距離の異なる複数の目標を観測する場合に、目標までの距離によって観測点間での各々の目標に対する入射角の変化が異なる。このため、入射角の変化が大きくなりすぎた目標に対しては、クラッタ信号だけでなく目標信号の強度まで低下してしまい、複数の目標を同時に抽出することが困難となっていた。
【0020】
以下では、本発明の目標類別装置の好適な実施の形態につき、図面を用いて説明する。
【0021】
実施の形態1.
この発明の実施の形態1に係る目標類別装置について、図1、図2を参照しながら説明する。
図1は、この発明の実施の形態1に係る目標類別装置の構成を示すブロック図である。なお、各図中、同一符号は同一又は相当部分を示す。
【0022】
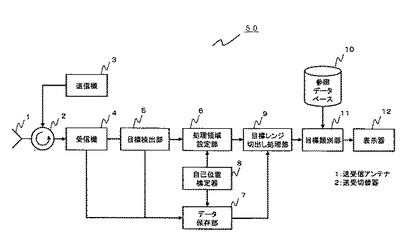
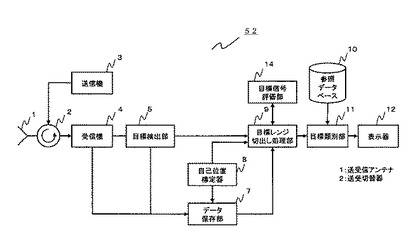
図1において、実施の形態1に係る目標類別装置50は、送受信アンテナ1と、送受切替器2と、送信機3と、受信機4と、目標検出部5と、処理領域設定部6と、データ保存部7と、自己位置標定器8と、目標レンジ切出し処理部9と、参照データベース10と、目標類別部11と、表示器12からなる。
ここで、送受信アンテナ1は、航空機などに搭載され、目標に向けて電波を照射し反射波を受信する。
送受切替器2は、送信と受信の切り替えを行う。
送信機3は、送信波を生成し送受切替器2を介して送受信アンテナ1に送信波を送る。 受信機4は、送受信アンテナ1及び送受切替器2を介して送られてきたレーダ信号を復調する。
目標検出部5は、受信機4で復調した信号から目標を検出する。
処理領域設定部6は、目標検出部5で検出した目標の存在する距離に応じて、目標レンジの切出しに使用する観測点数を設定する。
データ保存部7は、複数の観測点で測定し受信機4で復調した信号を記録する。
自己位置標定器8は、目標観測時の自己位置を標定し、その結果を処理領域設定部6とデータ保存部7に出力する。
目標レンジ切出し処理部9は、処理領域設定部6の出力に応じてデータ保存部7に保存した信号から、目標の存在する領域の切出しを行う。
参照データベース10は、目標を類別する際に使用する参照情報を格納している。
目標類別部11は、目標レンジ切出し処理部9で切出した目標レンジを参照データベース10の情報を利用して目標の類別を行う。
表示器12は、目標類別部11の目標類別結果を表示する。
【0023】
次に、この実施の形態1に係る目標類別装置の動作について説明する。
まず、送信器3にて生成した送信波を、送受切替器2を介して送受信アンテナ1より目標(図示せず)に対して電波を照射する。目標及び周辺部からの散乱波を送受信アンテナ1から送受切替器2を介して受信機4へ伝送する。
【0024】
受信機4では、目標からの散乱波を復調する。目標検出部5は、受信器4で復調された信号の強度比から目標の検出を行い、目標の存在する距離を指定する。また、自己位置標定器8で目標観測時の自己位置を計測する。観測時の自己位置と受信信号を目標の存在する距離ごとにデータ保存部7に記録する。上記の動作が1つの観測位置での目標情報の取得である。
【0025】
次に観測位置を移動して複数観測位置での目標情報を取得する。
2回目以降の観測では、処理領域設定部6において、目標の存在する距離、目標観測時の自己位置と、データ保存部7に保存した複数の観測情報とで目標の相関処理を行い、同一の目標を選定する。同一目標ごとに複数の観測情報に対して、現在観測した観測位置と目標とのなす角を計算する。処理領域設定部6には、目標信号の変化が少ない許容入射角の範囲が保存されており、この入射角の範囲よりも現在の観測位置と目標とのなす角が小さい観測位置を、複数の観測位置情報から選出する。選出した観測位置情報を目標レンジ切出し処理部9へ伝送する。
【0026】
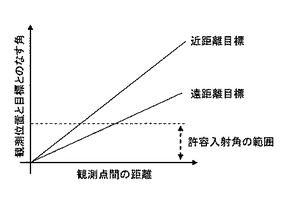
複数観測点の中から選出される観測位置の数は、目標の存在する距離によって異なる。 図2は、観測点間の距離と観測位置と目標のなす角の関係を示した図である。
観測点間の距離が同じ場合、近距離目標と遠距離目標を比較すると、遠距離目標のほうが観測位置と目標のなす角は小さくなる。このため、許容入射角の範囲を一定とした場合では、条件を満たす観測点間の距離が大きくなる。よって、近距離目標に対しては観測位置の数が少なく、遠距離目標に対しては観測位置の数が多くなる。
【0027】
目標レンジ切出し処理部9では、目標ごとに処理領域設定部6において選出された観測位置情報に対応する受信信号を抽出し、複数の観測位置情報を利用した目標レンジの切出し処理を行う。切出したレンジ領域を目標類別部11に伝送する。
【0028】
目標類別部11では、目標レンジ切出し処理部9から伝送された目標の存在するレンジ領域の信号を用いて、目標の類別を行う。
【0029】
目標の類別は、例えば、複数の偏波を利用して偏波ごとのレンジプロフィールを、参照データベース10に保存した各目標のレンジプロフィールと比較することで、目標の類別を行う。
【0030】
目標類別部11は、データベース10と、目標レンジ切出し処理部9から伝送された目標の存在するレンジ領域の信号を用いて類別した目標の類別結果を、表示器9に出力し結果を表示する。
【0031】
上述したように、本実施の形態の目標類別装置によれば、目標の存在する距離に応じて目標レンジの切出し処理を行うため、距離の異なる目標が複数存在した場合であっても、目標信号の強度が低下することを避け、類別確率の低下を防ぐことができる。
すなわち、本実施の形態の目標類別装置によれば、距離の異なる複数の目標が存在する場合であっても、各々の目標に対して目標の類別確率が高いレーダ装置を提供することができる。
【0032】
実施の形態2.
実施の形態1では予め許容される観測位置間と目標の入射角を指定するようにした。しかしながら、許容される入射角は目標の大きさに依存するため、実際には許容される入射角は一定とはならない。そこで実施の形態2のでは、許容される入射角を指定する許容角度入力器を備えて、許容入射角を設定するようにした。
【0033】
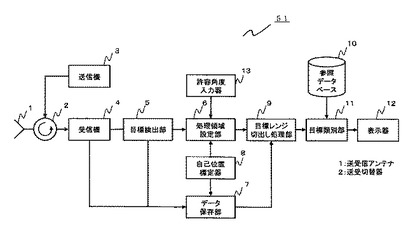
図3は、この発明の実施の形態2に係る目標類別装置51の構成を示すブロック図である。
実施の形態2に係る目標類別装置51は、実施の形態1の目標類別装置50の構成に、更に許容角度入力器13を備える。なお、図3で実施の形態1と同一部分は同一符号を付してその説明を省略する。
【0034】
次に、実施の形態2に係る目標類別装置51の動作について説明する。
実施の形態2の目標類別装置51では、許容角度入力器13により、まず、許容される入射角を設定する。
【0035】
許容される入射角を設定は、例えば観測する目標のサイズが大きい場合には、許容角度入力器13の入力により、許容される入射角を小さな値に設定する。
また、目標のサイズが小さい場合には、許容角度入力器13の入力により、許容される入射角を大きな値に設定する。
このような設定は、反射するサイズが大きいほど、反射波の形成するビームの幅が小さくなる特徴を利用するためである。
【0036】
また、目標の存在するクラッタの強度が弱い場合には、許容角度入力器13の入力により、許容される入射角を小さな値に設定する。
【0037】
許容角度入力器13で許容角度を設定した後の、処理領域設定部6以降の処理については実施の形態1の処理と同様である。
【0038】
このように、実施の形態2の目標類別装置によれば、許容される入射角を設定することができるため、観測したい目標の形状が類別を行いたいクラスによって大きく異なる場合であっても、複数の観測位置を利用する方法を利用することができる。
この結果、目標信号強度が低下することを防ぐことができるため、目標類別確率を確保することが可能である。
【0039】
実施の形態3.
実施の形態1では予め許容される観測位置間と目標の入射角を指定するようにしたが、実施の形態3では目標信号評価部14を備えるようにした。
【0040】
図4は、実施の形態3に係る目標類別装置52の構成を示すブロック図である。
実施の形態3に係る目標類別装置52は、新たに目標信号評価部14を備え、実施の形態1にあった処理領域設定部6を削除した。
なお、図4において、図1に示す実施の形態1と同一部分は同一符号を付してその説明は省略する。
【0041】
次に、実施の形態3に係る目標類別装置の動作について説明する。
実施の形態3に係る目標類別装置は、距離が異なる目標ごとに観測位置が異なる信号を利用した目標レンジ切出し処理を行い、切出し処理後に目標信号評価部14によって、目標信号を評価する。
この際に、観測位置の数がn個目の場合にまず、n個目と(n−1)個目を用いて切出し処理を行い、目標信号をnに対して評価を行う。
信号の劣化が少ない場合には、n個目、(n−1)個目、(n−2)個目と信号が劣化するまで繰り返す。
そして、信号が劣化する1つ前までの信号を目標類別部11に伝送する。
以降、実施の形態1と同様な処理によって目標検出を行う。
【0042】
このように、本実施の形態3によれば、複数信号を利用した切出処理後に信号を評価するため、最適な信号数を利用することができる。このため、目標類別確率を高めることが可能である。
【符号の説明】
【0043】
1 送受信アンテナ、2 送受切替器、3 送信機、4 受信機、5 目標検出部、6 処理領域設定部、7 データ保存部、8 自己位置標定器、9 目標レンジ切出処理部、10 参照データベース、11 目標類別部、12表示器、13 許容角度入力器、 14 目標信号評価部、50、51、52 実施の形態1に係る目標類別装置。
【技術分野】
【0001】
この発明は、検出した目標を類別可能な目標類別装置に関するものである。
【背景技術】
【0002】
航空機に搭載したレーダ装置では、上空から電波を送受信することによって地表面や海面付近の観測を行い、地表面や海面付近に存在する目標の検出を行う。この種のレーダ装置で地表面や海面付近を観測すると、一般に地表面や海面からの強いエコーが受信される。それぞれ「グラウンドクラッタ」や、「シークラッタ」と呼ぶ。ここでは、グラウンドクラッタやシークラッタのように背景からのエコーを、総称して単に「クラッタ」と呼ぶ。従って、目標類別を行うためにはクラッタの中から目標のエコーを検出し、類別処理を行う必要がある。なお、目標からのエコーを「目標信号」と呼ぶ。
【0003】
目標類別を行うレーダ装置に関する技術として、高分解能なレンジプロフィールや偏波特性を用いて類別を行うレーダ装置が開示されている(例えば、特許文献1参照)。
また、移動目標に対して目標を追尾することによって、目標の運動状態から目標を類別するレーダ装置が開示されている(例えば、特許文献2参照)。
【0004】
目標のレンジプロフィールを用いて類別を行う場合、受信したレーダ信号の中から目標が存在するレンジプロフィールの領域を抽出する必要がある。この際に航空機から地上を観測するレーダ装置では、クラッタ信号の影響を受けるため、目標領域の抽出が困難となる。
【0005】
この課題を解決する方式として電波の入射角による信号の変化が、クラッタ信号と目標信号で異なることを利用する方式が提案されている(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−257931号公報(図1)。
【特許文献2】特開2002−341022号公報(図1)。
【特許文献3】特願2010−090190号公報(図12)。
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら特許文献3に示される従来のレーダ装置では、距離の異なる複数の目標を観測する場合、自分と各々の目標との距離によって、移動前後での観測点間での目標に対する入射角の変化が異なってしまう。すなわち、距離の遠い目標に対しては入射角の変化は小さいが、距離の近い他の目標に対しては入射角の変化が大きくなる。
入射角の変化が大きくなりすぎると、クラッタ信号だけでなく、目標信号の強度も低下してしまい、目標の抽出が困難になるという課題があった。
【0008】
この発明は係る課題を解決するためになされたものであり、目標までの距離に応じて、クラッタ信号の抑圧処理に利用する観測点数(利用する観測位置)を制御することで、目標レンジの切出し処理を行う際の目標信号の低下を抑え、距離の異なる複数の目標に対しても同時に目標レンジの切出し処理が可能なレーダ装置を提供する。
【課題を解決するための手段】
【0009】
この発明の目標類別装置は、電波を送受信して観測信号を取得する送受信部と、自己位置を標定する自己位置標定部と、前記自己位置と、前記自己位置で取得された観測信号とが関連付けされたデータを保存するデータ保存部と、前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する目標検出部と、前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する処理領域設定部と、前記観測領域内で取得した前記観測信号を前記データ保存部から抽出し、抽出した観測信号を用いて目標の類別処理を行う処理部とを備える。
【発明の効果】
【0010】
この発明の目標類別装置によれば、目標までの距離の異なる複数目標に対しても、精度良く、同時に目標レンジの切出し処理を行うことができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態1に係る目標類別装置の構成を示すブロック図である。
【図2】実施の形態1に係る目標類別装置の観測点間の距離と観測位置と目標のなす角の関係を示した図である。
【図3】実施の形態2に係る目標類別装置の構成を示すブロック図である。
【図4】実施の形態3に係る目標類別装置の構成を示すブロック図である。
【図5】従来のレーダ装置と目標との関係を図式的に示す説明図である。
【図6】従来の反射信号のビームパターンを示す説明図である。
【発明を実施するための形態】
【0012】
ここでは、特許文献3に記載された従来のレーダ装置の概略動作について最初に説明した後、本発明に係る目標類別装置の実施の形態について説明する。
【0013】
図5は、特許文献3に記載されたレーダ装置と目標との関係を図式的に示した説明図である。図5において、航空機等に搭載されたレーダ装置100は、十分なレンジビン分解能を有するものの、アジマス分解能が低いものとし、アジマス方向(すなわち、分解能セル100aの幅方向)に移動しながら複数回の観測を行い、受信信号を得るものとする。
【0014】
図6は、目標Tと、クラッタCの各々で反射された反射信号のビームパターンを示す説明図である。反射信号Wt、反射信号Wcは、レーダ装置100から放射された電波が目標TとクラッタCで反射されるビームパターンの一例を示した図ある。
この反射信号Wt、反射信号Wcについては、目標TとクラッタCとについて、レーダ装置100から放射された電波が目標TおよびクラッタCで再放射される場合のビームパターンとして考えることができる。図6の例では、反射信号WcはクラッタCから再放射される場合の仮想的なビームパターンを表わし、反射信号Wtは目標Tから再放射される際の仮想的なビームパターンを表わしている。
【0015】
レーダ装置100のビームパターンは、電波が放射される開口面が大きいほど先の鋭い形状となることが知られている。
クラッタCに対しては、アジマス方向に広がった電波がそのまま照射されるため、クラッタCから再放射される電波(反射信号Wc)の仮想的な開口面はアジマス分解能と等価である。
【0016】
一方、目標Tの照射面は、目標Tの大きさによって決定する。
一般的に、目標サイズはアジマス分解能(分解能セル100aの幅方向)に比べて十分小さいので、目標Tの仮想的な開口面は、クラッタCの開口面に比べて小さくなる。
したがって、図6に示すように、クラッタCで再放射される電波(反射信号Wc)と目標Tで再照射される電波(反射信号Wt)との各ビームパターンを比較すると、目標Tの反射信号WtよりもクラッタCの反射信号Wcの方が先鋭化されたビームパターンとなる。
【0017】
図6の反射信号Wcのように先鋭化されたビームパターンでは、アジマス角がわずかに変化するだけでも、観測される信号が大きく変化する。
一方、反射信号Wtのようにビームパターンが先鋭化されておらず比較的ブロードな形状の場合には、アジマス角がわずかに変化した程度では観測される信号の変化は小さい。
【0018】
このように、異なるアジマス角で観測した信号間では目標Tの反射信号Wtに比べてクラッタCの反射信号Wcの相関が低くなる性質を利用し、異なるアジマス角で観測した複数の観測信号を処理することにより、クラッタCの反射信号Wcを抑圧することが可能である。
【0019】
しかしながら従来のレーダ装置では、先に述べたように、目標までの距離の異なる複数の目標を観測する場合に、目標までの距離によって観測点間での各々の目標に対する入射角の変化が異なる。このため、入射角の変化が大きくなりすぎた目標に対しては、クラッタ信号だけでなく目標信号の強度まで低下してしまい、複数の目標を同時に抽出することが困難となっていた。
【0020】
以下では、本発明の目標類別装置の好適な実施の形態につき、図面を用いて説明する。
【0021】
実施の形態1.
この発明の実施の形態1に係る目標類別装置について、図1、図2を参照しながら説明する。
図1は、この発明の実施の形態1に係る目標類別装置の構成を示すブロック図である。なお、各図中、同一符号は同一又は相当部分を示す。
【0022】
図1において、実施の形態1に係る目標類別装置50は、送受信アンテナ1と、送受切替器2と、送信機3と、受信機4と、目標検出部5と、処理領域設定部6と、データ保存部7と、自己位置標定器8と、目標レンジ切出し処理部9と、参照データベース10と、目標類別部11と、表示器12からなる。
ここで、送受信アンテナ1は、航空機などに搭載され、目標に向けて電波を照射し反射波を受信する。
送受切替器2は、送信と受信の切り替えを行う。
送信機3は、送信波を生成し送受切替器2を介して送受信アンテナ1に送信波を送る。 受信機4は、送受信アンテナ1及び送受切替器2を介して送られてきたレーダ信号を復調する。
目標検出部5は、受信機4で復調した信号から目標を検出する。
処理領域設定部6は、目標検出部5で検出した目標の存在する距離に応じて、目標レンジの切出しに使用する観測点数を設定する。
データ保存部7は、複数の観測点で測定し受信機4で復調した信号を記録する。
自己位置標定器8は、目標観測時の自己位置を標定し、その結果を処理領域設定部6とデータ保存部7に出力する。
目標レンジ切出し処理部9は、処理領域設定部6の出力に応じてデータ保存部7に保存した信号から、目標の存在する領域の切出しを行う。
参照データベース10は、目標を類別する際に使用する参照情報を格納している。
目標類別部11は、目標レンジ切出し処理部9で切出した目標レンジを参照データベース10の情報を利用して目標の類別を行う。
表示器12は、目標類別部11の目標類別結果を表示する。
【0023】
次に、この実施の形態1に係る目標類別装置の動作について説明する。
まず、送信器3にて生成した送信波を、送受切替器2を介して送受信アンテナ1より目標(図示せず)に対して電波を照射する。目標及び周辺部からの散乱波を送受信アンテナ1から送受切替器2を介して受信機4へ伝送する。
【0024】
受信機4では、目標からの散乱波を復調する。目標検出部5は、受信器4で復調された信号の強度比から目標の検出を行い、目標の存在する距離を指定する。また、自己位置標定器8で目標観測時の自己位置を計測する。観測時の自己位置と受信信号を目標の存在する距離ごとにデータ保存部7に記録する。上記の動作が1つの観測位置での目標情報の取得である。
【0025】
次に観測位置を移動して複数観測位置での目標情報を取得する。
2回目以降の観測では、処理領域設定部6において、目標の存在する距離、目標観測時の自己位置と、データ保存部7に保存した複数の観測情報とで目標の相関処理を行い、同一の目標を選定する。同一目標ごとに複数の観測情報に対して、現在観測した観測位置と目標とのなす角を計算する。処理領域設定部6には、目標信号の変化が少ない許容入射角の範囲が保存されており、この入射角の範囲よりも現在の観測位置と目標とのなす角が小さい観測位置を、複数の観測位置情報から選出する。選出した観測位置情報を目標レンジ切出し処理部9へ伝送する。
【0026】
複数観測点の中から選出される観測位置の数は、目標の存在する距離によって異なる。 図2は、観測点間の距離と観測位置と目標のなす角の関係を示した図である。
観測点間の距離が同じ場合、近距離目標と遠距離目標を比較すると、遠距離目標のほうが観測位置と目標のなす角は小さくなる。このため、許容入射角の範囲を一定とした場合では、条件を満たす観測点間の距離が大きくなる。よって、近距離目標に対しては観測位置の数が少なく、遠距離目標に対しては観測位置の数が多くなる。
【0027】
目標レンジ切出し処理部9では、目標ごとに処理領域設定部6において選出された観測位置情報に対応する受信信号を抽出し、複数の観測位置情報を利用した目標レンジの切出し処理を行う。切出したレンジ領域を目標類別部11に伝送する。
【0028】
目標類別部11では、目標レンジ切出し処理部9から伝送された目標の存在するレンジ領域の信号を用いて、目標の類別を行う。
【0029】
目標の類別は、例えば、複数の偏波を利用して偏波ごとのレンジプロフィールを、参照データベース10に保存した各目標のレンジプロフィールと比較することで、目標の類別を行う。
【0030】
目標類別部11は、データベース10と、目標レンジ切出し処理部9から伝送された目標の存在するレンジ領域の信号を用いて類別した目標の類別結果を、表示器9に出力し結果を表示する。
【0031】
上述したように、本実施の形態の目標類別装置によれば、目標の存在する距離に応じて目標レンジの切出し処理を行うため、距離の異なる目標が複数存在した場合であっても、目標信号の強度が低下することを避け、類別確率の低下を防ぐことができる。
すなわち、本実施の形態の目標類別装置によれば、距離の異なる複数の目標が存在する場合であっても、各々の目標に対して目標の類別確率が高いレーダ装置を提供することができる。
【0032】
実施の形態2.
実施の形態1では予め許容される観測位置間と目標の入射角を指定するようにした。しかしながら、許容される入射角は目標の大きさに依存するため、実際には許容される入射角は一定とはならない。そこで実施の形態2のでは、許容される入射角を指定する許容角度入力器を備えて、許容入射角を設定するようにした。
【0033】
図3は、この発明の実施の形態2に係る目標類別装置51の構成を示すブロック図である。
実施の形態2に係る目標類別装置51は、実施の形態1の目標類別装置50の構成に、更に許容角度入力器13を備える。なお、図3で実施の形態1と同一部分は同一符号を付してその説明を省略する。
【0034】
次に、実施の形態2に係る目標類別装置51の動作について説明する。
実施の形態2の目標類別装置51では、許容角度入力器13により、まず、許容される入射角を設定する。
【0035】
許容される入射角を設定は、例えば観測する目標のサイズが大きい場合には、許容角度入力器13の入力により、許容される入射角を小さな値に設定する。
また、目標のサイズが小さい場合には、許容角度入力器13の入力により、許容される入射角を大きな値に設定する。
このような設定は、反射するサイズが大きいほど、反射波の形成するビームの幅が小さくなる特徴を利用するためである。
【0036】
また、目標の存在するクラッタの強度が弱い場合には、許容角度入力器13の入力により、許容される入射角を小さな値に設定する。
【0037】
許容角度入力器13で許容角度を設定した後の、処理領域設定部6以降の処理については実施の形態1の処理と同様である。
【0038】
このように、実施の形態2の目標類別装置によれば、許容される入射角を設定することができるため、観測したい目標の形状が類別を行いたいクラスによって大きく異なる場合であっても、複数の観測位置を利用する方法を利用することができる。
この結果、目標信号強度が低下することを防ぐことができるため、目標類別確率を確保することが可能である。
【0039】
実施の形態3.
実施の形態1では予め許容される観測位置間と目標の入射角を指定するようにしたが、実施の形態3では目標信号評価部14を備えるようにした。
【0040】
図4は、実施の形態3に係る目標類別装置52の構成を示すブロック図である。
実施の形態3に係る目標類別装置52は、新たに目標信号評価部14を備え、実施の形態1にあった処理領域設定部6を削除した。
なお、図4において、図1に示す実施の形態1と同一部分は同一符号を付してその説明は省略する。
【0041】
次に、実施の形態3に係る目標類別装置の動作について説明する。
実施の形態3に係る目標類別装置は、距離が異なる目標ごとに観測位置が異なる信号を利用した目標レンジ切出し処理を行い、切出し処理後に目標信号評価部14によって、目標信号を評価する。
この際に、観測位置の数がn個目の場合にまず、n個目と(n−1)個目を用いて切出し処理を行い、目標信号をnに対して評価を行う。
信号の劣化が少ない場合には、n個目、(n−1)個目、(n−2)個目と信号が劣化するまで繰り返す。
そして、信号が劣化する1つ前までの信号を目標類別部11に伝送する。
以降、実施の形態1と同様な処理によって目標検出を行う。
【0042】
このように、本実施の形態3によれば、複数信号を利用した切出処理後に信号を評価するため、最適な信号数を利用することができる。このため、目標類別確率を高めることが可能である。
【符号の説明】
【0043】
1 送受信アンテナ、2 送受切替器、3 送信機、4 受信機、5 目標検出部、6 処理領域設定部、7 データ保存部、8 自己位置標定器、9 目標レンジ切出処理部、10 参照データベース、11 目標類別部、12表示器、13 許容角度入力器、 14 目標信号評価部、50、51、52 実施の形態1に係る目標類別装置。
【特許請求の範囲】
【請求項1】
電波を送受信して観測信号を取得する送受信部と、
自己位置を標定する自己位置標定部と、
前記自己位置と、前記自己位置で取得された観測信号とが関連付けされたデータを保存するデータ保存部と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する目標検出部と、
前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する処理領域設定部と、
前記観測領域内で取得した前記観測信号を前記データ保存部から抽出し、抽出した観測信号を用いて目標の類別処理を行う処理部と、
を備えることを特徴とする目標類別装置。
【請求項2】
前記処理領域設定部は、前記目標と前記観測信号を取得した自己位置のなす角度に基づき、前記目標の類別処理に用いる観測領域を設定することを特徴とする請求項1記載の目標類別装置。
【請求項3】
前記目標検出部は、複数の目標の検出を同時に行い、
前記処理領域設定部は、各々の目標までの距離に応じて目標毎に観測領域を設定し、
前記処理部は、各観測領域内で取得した各観測信号に基づき各々の目標の類別処理を行うことを特徴とする請求項1、2いずれか記載の目標類別装置。
【請求項4】
電波を送受信して観測信号を取得する工程と、
自己位置を標定する工程と、
前記自己位置と、前記自己位置で取得した前記観測信号とを関連付けしてデータベースに保存する工程と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する工程と、
前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する工程と、
前記観測領域内で取得した前記観測信号を前記データベースから抽出し、抽出した観測信号を用いて目標の類別処理を行う工程と、
からなる目標類別方法。
【請求項5】
電波を送受信して観測信号を取得する送受信部と、
自己位置を標定する自己位置標定部と、
前記自己位置と、前記自己位置で取得した前記観測信号とを関連付けした観測データを保存する観測データ保存部と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を算出する目標検出部と、
前記目標までの距離と前記観測データ保存部に保存された観測信号から目標の存在する領域の切出しを行い、目標信号を抽出する目標レンジ切出し処理部と、
前記目標信号の劣化の有無を評価する目標信号処理部と、
劣化の少ない目標信号に基づき、目標の類別処理を行う目標類別部と、
を備えることを特徴とする目標類別装置。
【請求項1】
電波を送受信して観測信号を取得する送受信部と、
自己位置を標定する自己位置標定部と、
前記自己位置と、前記自己位置で取得された観測信号とが関連付けされたデータを保存するデータ保存部と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する目標検出部と、
前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する処理領域設定部と、
前記観測領域内で取得した前記観測信号を前記データ保存部から抽出し、抽出した観測信号を用いて目標の類別処理を行う処理部と、
を備えることを特徴とする目標類別装置。
【請求項2】
前記処理領域設定部は、前記目標と前記観測信号を取得した自己位置のなす角度に基づき、前記目標の類別処理に用いる観測領域を設定することを特徴とする請求項1記載の目標類別装置。
【請求項3】
前記目標検出部は、複数の目標の検出を同時に行い、
前記処理領域設定部は、各々の目標までの距離に応じて目標毎に観測領域を設定し、
前記処理部は、各観測領域内で取得した各観測信号に基づき各々の目標の類別処理を行うことを特徴とする請求項1、2いずれか記載の目標類別装置。
【請求項4】
電波を送受信して観測信号を取得する工程と、
自己位置を標定する工程と、
前記自己位置と、前記自己位置で取得した前記観測信号とを関連付けしてデータベースに保存する工程と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を取得する工程と、
前記目標までの距離に応じて、前記目標の類別処理に用いる観測領域を設定する工程と、
前記観測領域内で取得した前記観測信号を前記データベースから抽出し、抽出した観測信号を用いて目標の類別処理を行う工程と、
からなる目標類別方法。
【請求項5】
電波を送受信して観測信号を取得する送受信部と、
自己位置を標定する自己位置標定部と、
前記自己位置と、前記自己位置で取得した前記観測信号とを関連付けした観測データを保存する観測データ保存部と、
前記観測信号に基づき目標の検出を行い、前記目標までの距離を算出する目標検出部と、
前記目標までの距離と前記観測データ保存部に保存された観測信号から目標の存在する領域の切出しを行い、目標信号を抽出する目標レンジ切出し処理部と、
前記目標信号の劣化の有無を評価する目標信号処理部と、
劣化の少ない目標信号に基づき、目標の類別処理を行う目標類別部と、
を備えることを特徴とする目標類別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−198184(P2012−198184A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−64221(P2011−64221)
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]