
目標類識別装置
【課題】観測諸元等の異なる複数の教師画像を統合した類識別フィルタ生成において、観測諸元パラメータの離散的分布状況に対応可能な目標類識別装置を得る。
【解決手段】教師画像データファイル1に格納された複数の観測条件で得た観測目標の教師画像データに対して位置あわせ等のフィルタ生成前の前処理を行う画像前処理部3と、前処理後教師画像データに対して観測諸元の離散的分布を補うための高輝度領域の拡張を行う教師画像拡張部4と、2以上の拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部5と、観測画像データファイル2に格納された種類判定対象の観測画像データと、種類判定フィルタ生成部5が生成した種類判定フィルタとの照合を行って、観測目標の種類判定を行い、判定結果を種類判定結果ファイル7に格納する画像照合部6とを備えている。
【解決手段】教師画像データファイル1に格納された複数の観測条件で得た観測目標の教師画像データに対して位置あわせ等のフィルタ生成前の前処理を行う画像前処理部3と、前処理後教師画像データに対して観測諸元の離散的分布を補うための高輝度領域の拡張を行う教師画像拡張部4と、2以上の拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部5と、観測画像データファイル2に格納された種類判定対象の観測画像データと、種類判定フィルタ生成部5が生成した種類判定フィルタとの照合を行って、観測目標の種類判定を行い、判定結果を種類判定結果ファイル7に格納する画像照合部6とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は目標類識別装置に関し、特に、種類未知の目標のレーダ観測画像データを対象に、目標種別を判定するための目標類識別装置に関するものである。
【背景技術】
【0002】
従来行われてきた目標類識別方法としては、レーダ観測で得られた静止目標の観測画像データに対し、事前に得られている各機種の教師画像とのパターンマッチングを行い、目標種別を判定する方法が知られている。教師画像は、一般的に、シミュレーション画像(諸元既知)もしくは実画像(一部の諸元未知)のいずれかとする。
【0003】
非特許文献1に記載の手法では、同一目標に対する観測諸元(目標主軸方向(向き))が異なる複数画像を統合して類識別フィルタを生成する。
【0004】
フィルタ統合の前処理としては、輝度調整、大きさの正規化、中心位置合わせ等の処理を行う。
【0005】
非特許文献1に記載の手法は、目標主軸方向等のパラメータ推定を行わずに、様々な向きの画像を統合することにより、向きの異なる画像に対応でき、また、教師画像とのマッチングではなく、フィルタとのマッチングを行うことにより、教師画像の選択に性能が依存しないという特徴がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】Rajesh K. Shenoy,“Object detection and classification in SAR images using MINACE correlation filters”, A project report for the degree of Master of Science, Carnegie Mellon University, Department of Electrical and Computer Engineering, April 10,1995
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の目標類識別装置では、目標主軸方向が異なる画像間でフィルタを生成する場合、原理的には、目標を離散的に回転移動した画像を組み合わせたフィルタが生成される。
【0008】
図2に、従来技術における目標主軸方向の異なる2教師画像によるフィルタ生成例を示す。ドットで塗りつぶされた、黒っぽい丸及び白っぽい丸が高輝度点を表す(以下、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも、輝度値が高いとする)。目標Aに対する目標主軸方向の異なる教師画像1(図2(a))と教師画像2(図2(b))から目標Aの種類判定フィルタ(図2(c))が生成される。すなわち、図2(c)に示す目標Aの種類判定フィルタは、図2(a)および(b)の教師画像1,2を組み合わせたものである。
【0009】
従来方法では、フィルタ生成時に様々な目標主軸方向(向き)の画像が得られていない場合、フィルタ生成に用いた教師画像と種類判定対象である観測画像との目標主軸方向(向き)差が大きい場合には、フィルタと分布状況が大きく異なり、対応できない。また、目標主軸方向差が小さい場合であっても、離散的な分布点に基づき生成されたフィルタでは、教師画像と観測画像の目標主軸方向差が開くほど、フィルタへの適合度が下がる傾向にある、という課題があった。
【0010】
さらに、観測諸元としては目標主軸方向の他に、撮像日時、航空機/衛星等に搭載されたレーダから送信される電波の入射角、偏波、分解能等が考えられる。これらの観測諸元の異なる画像、特に入射角差が大きい画像間では、同一機種であっても、倒れこみと呼ばれる現象により、レーダ観測画像の輝度分布(輝度値、分布位置)等が異なる。
【0011】
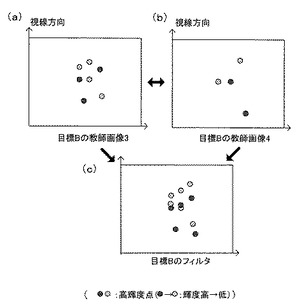
図3〜4に従来技術における入射角の異なる2教師画像によるフィルタ生成例を示す。図3が、入射角差が比較的小さい2教師画像によるフィルタ生成、図4が、入射角差が比較的大きい2教師画像によるフィルタ生成の例である。図3,4においても、黒丸及び白丸が、高輝度点を表す(黒丸は、白丸よりも輝度値が高いとする)。
【0012】
図3において、目標Bに対する入射角の異なる教師画像1(図3(a))と教師画像2(図3(b))から目標Bの種類判定フィルタ(図3(c))が生成される。同様に、図4では、目標Bに対する入射角の異なる教師画像3(図4(a))と教師画像4(図4(b))から目標Bの種類判定フィルタ(図4(c))が生成される。
【0013】
入射角の異なる画像間でフィルタ生成を行った場合、図4のように入射角差が比較的大きい場合は特に、輝度分布が発散して、その結果、異機種との適合度も高くなり、誤検出が発生しやすくなる。また図3のように、入射角差が比較的小さい画像間で生成したフィルタであっても、入射角は離散的に分布し、それに応じて輝度分布も変動するため、フィルタ適用画像との入射角差が開くほど、フィルタへの適合度が下がる傾向にある、という課題があった。
【0014】
この発明は、かかる課題を解決するためになされたものであり、観測諸元パラメータの離散的分布の影響を補い、適合度の高いフィルタを生成して、高精度な目標類識別装置を得ることを目的とする。
【課題を解決するための手段】
【0015】
この発明は、観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、上記観測目標の種類判定結果を格納する種類判定結果ファイルとを備えたことを特徴とする目標類識別装置である。
【発明の効果】
【0016】
この発明は、観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、上記観測目標の種類判定結果を格納する種類判定結果ファイルとを備えたことを特徴とする目標類識別装置であるので、観測諸元パラメータの離散的分布の影響を補い、適合度の高いフィルタを生成して、高精度な種類判定を行うことを可能にする。
【図面の簡単な説明】
【0017】
【図1】この発明の実施の形態1に係る目標類識別装置の構成を示すブロック図である。
【図2】従来技術による種類判定フィルタ生成例を示す説明図である。
【図3】従来技術による種類判定フィルタ生成例を示す説明図である。
【図4】従来技術による種類判定フィルタ生成例を示す説明図である。
【図5】この発明の実施の形態1による種類判定フィルタ生成例を示す説明図である。
【図6】この発明の実施の形態2による種類判定フィルタ生成例を示す説明図である。
【図7】この発明の実施の形態3による種類判定フィルタ生成例を示す説明図である。
【図8】この発明の実施の形態3による種類判定フィルタ生成例を示す説明図である。
【発明を実施するための形態】
【0018】
実施の形態1.
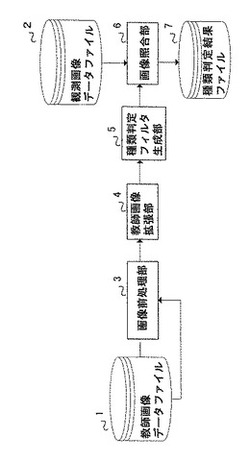
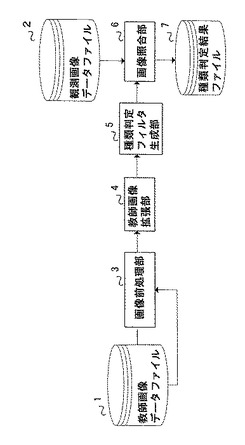
図1は、この発明の実施の形態1に係る目標類識別装置の構成を示すブロック図である。図1に示すように、本実施の形態1に係る目標類識別装置は、様々な観測条件で得られた目標の複数の教師画像データである教師画像データ群とその観測諸元データを格納する教師画像データファイル1と、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイル2と、教師画像データ群に対して位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データ群を生成する画像前処理部3と、前処理後教師画像データ群に対し、教師画像データ群の観測諸元の離散的分布を補うための拡張を行い、拡張後教師画像データ群を生成する教師画像拡張部4と、拡張後教師画像データ群から種類判定フィルタを生成する種類判定フィルタ生成部5と、種類判定対象である観測画像データと種類判定フィルタとの照合を行い、観測目標の種類判定を行う画像照合部6と、観測目標の種類判定結果を格納する種類判定結果ファイル7とを備えている。
【0019】
なお、図1には示されていないが、観測画像データファイル2の入力側には、撮像装置および信号処理装置が接続されている。信号処理装置は、撮像装置で撮像された観測画像を基に観測画像データTを算出し、観測画像データファイル2に格納する。観測画像データファイル2には、観測画像データTの観測諸元データも同時に格納される。なお、観測諸元データとしては、例えば、観測時の観測レーダの送信電波の入射角、観測レーダの視線方向、目標主軸方向、観測日時、観測所要時間、観測地域、観測レーダの分解能や観測モード(多偏波観測等)などが挙げられる。
【0020】
また、教師画像データファイル1は、事前に様々な観測条件で目標を観測することによって得られた、計算機等に蓄積されている種類既知の目標画像データ、もしくは、計算機シミュレーションで生成された各目標の画像データからなる、教師画像データLを格納している。教師画像データファイル1には、教師画像データLの観測諸元データも同時に格納される。
【0021】
種類判定結果ファイル7は、後述する画像照合部6によって得られる種類判定結果データRを格納する。
【0022】
画像前処理部3は、教師画像データファイル1からの教師画像データLを入力情報とし、教師画像データLに対して、輝度調整、大きさの正規化、中心位置合わせ等の前処理を行い、前処理後の画像を前処理後画像データPとして出力する。
【0023】
教師画像拡張部4は、画像前処理部3から出力される前処理後画像データPに対して高輝度点領域の拡張を行い、拡張後教師画像データKを生成する。
【0024】
種類判定フィルタ生成部5は、教師画像拡張部4から出力される拡張後教師画像データKから種類判定フィルタFを生成する。
【0025】
画像照合部6は、種類判定フィルタ生成部5から出力される種類判定フィルタFを用いて、観測画像データファイル2に格納された観測画像データTの種類判定を行い、種類判定結果R(全体の出力情報)を生成し、種類判定結果ファイル7に格納する。
【0026】
次に、図5の説明図を参照しながら、図1に示した各機能ブロック3〜6の動作について、さらに具体的に説明する。
【0027】
まず、画像前処理部3は、教師画像データLを教師画像データファイル1から読み出して、当該教師画像データLを対象として、例えばLOG法等による輝度調整を行う。LOG法とは、画像の輝度の対数をとることにより、輝度差(濃淡差、振幅差)を小さくする方法であり、画像の視認性を向上させる。次に、1画素あたりの目標の大きさが、観測諸元に依存しないよう、事前に得られている各画像の観測諸元に基づき、スケール合わせる処理を行う。すなわち、大きさの正規化を行う。さらに、中心位置合わせとしては、教師画像の中から、基準となる画像である基準画像を任意に選定し、基準画像と各教師画像とを、1画素ずつずらしながら、重ね合わせを行い、基準画像と教師画像との相関係数が最大となったところを位置合わせ点とする。これらの処理を総じて前処理と呼ぶ。画像前処理部3は、こうした教師画像データLを対象とした前処理によって得られる画像データを、前処理後画像データPとして出力する。
【0028】
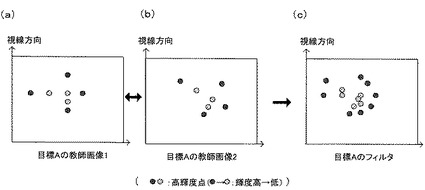
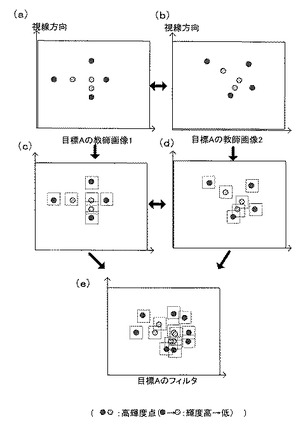
続いて、教師画像拡張部4では、教師画像データの観測諸元の離散的分布を補うために、画像前処理部3から出力された前処理後画像データPを対象として、各高輝度点を中心に高輝度領域の拡張を行う。高輝度領域の拡張は、中心となる高輝度点Cの近傍のN個の近傍画素の輝度値を、高輝度点Cと同じ輝度値に変更する、あるいは、高輝度点Cの輝度値を最大値として、N個の近傍画素の輝度値を、高輝度点Cからの距離に反比例した値に設定するなどの方法がある。近傍画素の個数Nは、事前に指定、もしくは、オペレータによって設定される、あるいは、目標画像の総画素数等から事前に与えられた計算式に基づき自動的に算出する方法等がある。輝度領域拡張時に、他の高輝度点との拡張領域の重複がある場合は、たとえば、それぞれの輝度値のうち、最大の値に設定する。
【0029】
図5は、高輝度領域の拡張例を示しており、ドットで塗りつぶされた、黒っぽい丸及び白っぽい丸が高輝度点を表す(以下、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。領域拡張対象となる高輝度点は、事前に設定された輝度しきい値Sb以上の輝度値を持つ画素、あるいは、目標画像内の輝度上位M個の画素などの方法で決定する。輝度しきい値Sbや輝度上位画素数Mは、事前に指定、もしくは、オペレータによって設定される、あるいは、目標画像の総画素数や最大輝度値等から、事前に与えられた計算式に基づき自動的に算出する等の設定方法等がある。目標Aに対する教師画像1(図5(a))と教師画像2(図5(b))に対し、各高輝度点の近傍のN個の画素を新たに高輝度領域とし(図5(c),図5(d))、それらを拡張後教師画像データEとして出力する。各高輝度点を中心とした矩形領域が拡張後の高輝度領域を表す。
【0030】
続いて、種類判定フィルタ生成部5では、拡張後教師画像データEを対象に、種類判定フィルタFを生成する。具体的には、各拡張後教師画像データEを二次元フーリエ変換後、ラスタ走査によりベクトル化して教師画像ベクトルとし、教師画像ベクトル間の内積行列を求める。内積行列と各教師画像ベクトルの重み値からなるベクトルとの積が、全要素1のベクトルになるよう、各教師画像ベクトルの重み値を求める。算出された各教師画像ベクトルの重み値を用いて、重み付き教師画像ベクトルの和を求め、フィルタベクトルとする。以上の手順により、フィルタベクトルと全教師画像との相関がすべて1になるように、フィルタベクトル(すなわち、種類判定フィルタF)が算出される。図5(e)に、目標Aの種類判定フィルタFを示す。
【0031】
なお、上記例では複数の拡張後教師画像データEを統合して、種類判定フィルタFを生成したが、各拡張後教師画像データEを、そのまま、それぞれ独立した種類判定フィルタとして用いても良い。
【0032】
最後に画像照合部6では、観測画像データファイル2から種類判定対象である観測画像データを読み出し、当該観測画像データTと種類判定フィルタFとのパターンマッチング等により、種類判定を行う。パターンマッチングでは、観測画像データTと種類判定フィルタFとを1画素ずつずらしながら、相関係数を算出し、最も相関係数が高い位置での相関係数を求め、求めた相関係数が、事前に設定された種類判定しきい値Sr以上であれば、該当機種(種類)と判定し、種類判定結果Rとして出力するとともに、種類判定結果Rを種類判定結果ファイル7に格納する。
【0033】
なお種類判定しきい値Srは、たとえば種類判定フィルタF生成の際に、事前に得られている種類既知の画像データのうち、フィルタ算出対象外である画像データのフィルタへの適合の度合を、たとえば平均正答率等から判定し、最も適合の度合いが高い値に設定する。
【0034】
以上のように、本実施の形態1に係る目標類識別装置では、教師画像拡張部4において、教師画像データの高輝度領域を拡張することにより、諸元パラメータの離散的分布の影響で離散的に点在する高輝度点が補間され、諸元データの分布状況に依存しない汎用的な種類判定フィルタの生成が可能となる。また、高輝度領域の拡張の際に、高輝度点からの距離に応じて輝度値を設定することにより、教師画像の分布点を中心とした重み付き高輝度領域拡張が可能となり、高輝度領域の発散による、誤検出の発生を抑えることができる。さらに、事前に得られる諸元毎の教師画像数が限定される場合でも、諸元の異なる教師画像間の統合により、フィルタ生成が可能となるので、適合度の高いフィルタを得ることができる。
【0035】
実施の形態2.
本実施の形態に係る目標類識別装置の構成は、上述の実施の形態1で説明した図1の構成と基本的に同じであるため、図1を参照することとし、ここでは説明を省略する。また、本実施の形態2においては、教師画像拡張部4の動作のみが実施の形態1と異なり、他の動作は同じであるため、以下では、実施の形態1と異なる動作を中心に説明する。
【0036】
上述の実施の形態1(図1、図5)では、教師画像拡張部4において、高輝度点を中心に近傍画素に高輝度領域を拡張したが、離散的分布を考慮すべき観測諸元パラメータの変動予測に合わせて、高輝度点の分布点を予測して、回転方向に高輝度領域を拡張してもよい。本実施の形態2においては、その場合について説明する。
【0037】
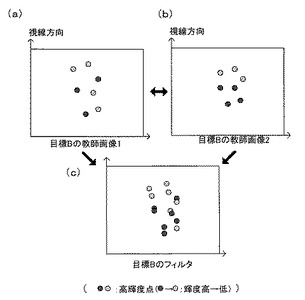
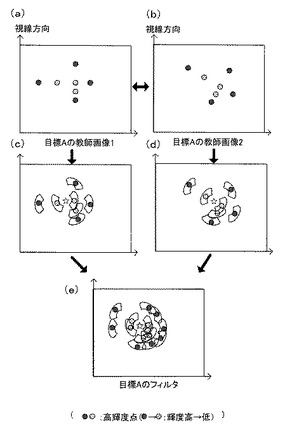
たとえば、変動が予測される諸元パラメータとして、目標主軸方向を考える。離散的に分布する目標主軸方向を補間する方法として、目標の回転移動による高輝度点の軌跡を用いる。具体的には、各教師画像において、輝度上位M個の高輝度点の位置から回転中心点を決定し(たとえば、輝度上位M個の高輝度点からなる凸包の中心点、あるいは、輝度上位M個の高輝度点の重心、等)、各高輝度点に対し、角度±θの回転移動を行い、高輝度点の回転移動軌跡で定義される領域を高輝度領域として拡張する。ここで、θは、事前に指定される、もしくは、オペレータにより設定される、あるいは、主軸方向が既知、もしくは、推定可能な教師画像データの主軸方向情報(平均角度差等)を用いて、事前に与えられた計算式により自動的に算出する等の設定方法が考えられる。
【0038】
図6に回転方向への高輝度領域拡張例を示す。図6において、ドットで塗りつぶされた黒っぽい丸及び白っぽい丸が高輝度点を表す(以下では、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。また、図6における教師画像1,2は、画像前処理部3における前処理が行われているものとする。画像前処理部3における前処理までの動作は、実施の形態1と同じである。教師画像拡張部4は、画像前処理部3で前処理された、目標Aに対する目標主軸方向の異なる教師画像1(図6(a))と教師画像2(図6(b))に対し、それぞれの輝度上位M個の高輝度点の位置から回転の中心点(☆)を求め、各高輝度点に対し、当該中心点を中心とした角度±θの回転移動を行って(図6(c),図6(d))、各高輝度点の回転移動軌跡で定義される領域を高輝度領域として拡張して、拡張後教師画像データEを生成する。図6(c),(d)における各高輝度点を中央に含む帯状領域が、各高輝度点の回転移動軌跡で定義される領域であり、すなわち、本実施の形態における拡張後の高輝度領域である。
【0039】
次に、種類判定フィルタ生成部5が、図6(c),(d)に示す拡張後教師画像データEを統合させて、目標Aの種類判定フィルタF(図6(e))を生成する。フィルタ生成手順としては、実施の形態1と同様に行えばよい。なお、種類判定フィルタFは、複数の拡張後教師画像データを必ずしも統合する必要はなく、実施の形態1同様、各拡張後教師画像データ(図6(c),(d))を、そのまま種類判定フィルタFとしても良い。画像照合部6では、この種類判定フィルタFを用いて種類判定を行い、種類判定結果Rを種類判定ファイル7に格納する。種類判定フィルタ生成部5以降の動作は、実施の形態1と基本的に同じである。
【0040】
また、高輝度領域の輝度値に関しても、実施の形態1同様、高輝度点の輝度値と等しくする、あるいは、高輝度点の輝度値を最大値として、高輝度点からの距離に反比例した値に設定してもよい。
【0041】
以上のように、この発明の実施の形態2によれば、上記の実施の形態1と同様の効果が得られる。本実施の形態2においては、教師画像拡張部4において、観測諸元の変動予測に合わせて、高輝度点の分布点を予測して、回転方向に高輝度領域を拡張するようにしたので、高輝度領域の拡張範囲が限定され、誤検出の発生確率をおさえることができる。
【0042】
実施の形態3.
本実施の形態に係る目標類識別装置の構成は、上述の実施の形態1,2で説明した図1の構成と基本的に同じであるため、図1を参照することとし、ここでは説明を省略する。また、本実施の形態3においては、教師画像拡張部4の動作のみが実施の形態1と異なり、他の動作は同じであるため、以下では、実施の形態1と異なる動作を中心に説明する。
【0043】
上述の実施の形態1〜2(図1、図5〜6)では、教師画像拡張部4において、高輝度点を中心に近傍画素に高輝度領域を拡張するか、あるいは、回転方向に高輝度領域を拡張したが、回転移動のような比較的一律な高輝度点の移動ではなく、個々の高輝度点間の輝度値の変動や、あるいは、移動方向は同じであるが、移動距離が高輝度点ごとに異なる等の状況もあるので、それらの状況を想定して、移動距離も考慮した、特定の方向への高輝度領域の拡張を行ってもよい。本実施の形態3においては、その場合について説明する。
【0044】
たとえば、変動が予測される諸元パラメータとして、衛星等に搭載された観測レーダの軌道によって定義される、送信電波の入射角を考える。入射角の変動に伴い、倒れこみと呼ばれる現象が発生することにより、各高輝度点の輝度値及び分布位置も変動する。ここで倒れこみでは、高輝度点の輝度位置はレーダからの視線方向に移動し、また、高輝度点の移動距離は、電波の反射点の高さ方向の位置(すなわち目標上の反射点の地上からの高さ)に応じて決まることがわかっている。そこで、教師画像の各高輝度点に対し、レーダからの視線方向への平行移動を行い、高輝度点の平行移動軌跡で定義される領域を、高輝度領域として拡張する。
【0045】
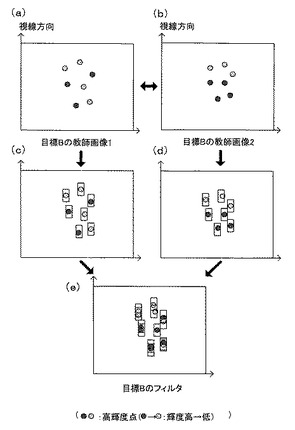
図7に視線方向への高輝度領域拡張例を示す。ここで、対象とする2つの教師画像は、比較的、入射角差が小さい場合を想定している。図7において、ドットで塗りつぶされた黒っぽい丸及び白っぽい丸が高輝度点を表す(以下では、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。また、図7における教師画像1,2は、画像前処理部3における前処理が行われているものとする。画像前処理部3における前処理までの動作は、実施の形態1と同じである。教師画像拡張部4は、画像前処理部3で前処理された、目標Bに対する入射角の異なる教師画像1(図7(a))と教師画像2(図7(b))を対象に、各高輝度点に対し、視線方向に距離±αの平行移動を行い、高輝度点の平行移動軌跡で定義される略々矩形の帯状領域を求め(図7(c),図7(d))、それを拡張後の高輝度領域とした拡張後教師画像データEを生成する。図7(c),(d)において、各高輝度点を中央に含む帯状領域が本実施の形態における拡張後の高輝度領域を表す。ここで、各高輝度点の移動距離αは、事前に反射点の高さがある程度予測可能な場合には、たとえば、事前に得られている反射点高さと倒れこみ距離の分布状況データに基づき、移動距離を予測して設定する。反射点高さが予測できない場合には、目標の全体形状から予測される倒れこみ距離範囲を指標に、たとえば、その中央値もしくは最大値等を設定する。
【0046】
次に、種類判定フィルタ生成部5が、拡張後教師画像データEから、目標Bの種類判定フィルタF(図7(e))を生成する。フィルタ生成手順としては、実施の形態1と同様に行えばよい。なお、種類判定フィルタFは、実施の形態1同様、複数の拡張後教師画像データEを統合して生成せずに、各拡張後教師画像データを、そのまま種類判定フィルタFとしても良い。画像照合部6では、この種類判定フィルタFを用いて、種類判定を行い、種類判定結果Rを種類判定ファイル7に格納する。種類判定フィルタ生成部5以降の動作は、実施の形態1と基本的に同じである。
【0047】
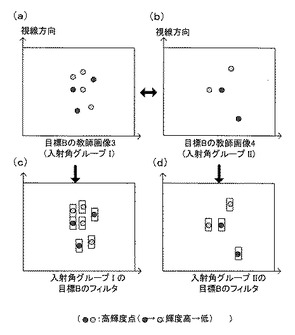
なお、上記図7の例では、入射角差が比較的小さい場合を対象としているが、図8(a),(b)に示す教師画像3及び教師画像4のように、教師画像の入射角差の開きが比較的大きい場合には、複数の拡張後教師画像データを対象といたフィルタ生成により、高輝度領域の発散が起こりうる。
【0048】
ここで、入射角はレーダ観測諸元として、観測時に与えられる情報であることを踏まえると、あえて入射角差が大きい教師画像間でのフィルタ生成を行わずに、独立したフィルタとする方法も考えられる。すなわち、フィルタ生成の際の入射角統合範囲を示す情報である入射角統合情報を事前に定義し、入射角統合情報に基づき入射角をグルーピングし、入射角グループごとにフィルタを生成する(図8(c)及び図8(d))ようにしてもよい。
【0049】
なお、高輝度領域の輝度値に関しては、入射角の違いによる輝度分布変動を考慮して、事前に設定された輝度正規化しきい値Sn以上の高輝度点の輝度を、すべて一様な値(例えばSn)に正規化し(輝度正規化値とする)、拡張高輝度領域内の輝度値も輝度正規化値に設定する方法が考えられる。これにより、輝度分布の変動に左右されないフィルタ生成が可能となる。
【0050】
以上のように、この発明の実施の形態3によれば、上記の実施の形態1と同様の効果が得られる。本実施の形態3においては、教師画像拡張部4は、移動距離も考慮した、特定の方向への高輝度領域拡張を行うことにより、高輝度領域の拡張範囲が限定され、誤検出の発生確率をおさえることができる。
【0051】
また、実施の形態3においては、教師画像データを入射角ごとにグルーピングして、グループごとに種類判定フィルタを生成するようにしたので、入射角差の大きい場合に、個々の入射角グループの輝度分布状況に応じたフィルタ生成が可能となる。なお、ここでは、特定の観測諸元パラメータ値として入射角を例に挙げたが、その場合に限らず、他の観測諸元パラメータ値ごとにグルーピングを行ってもよい。また、実施の形態1,2においても、グルーピングを行ってもよく、その場合も同様の効果が得られる。
【0052】
また、本実施の形態3においては、入射角の変動に伴う輝度分布変動を考慮して、高輝度領域拡張の際の輝度値を正規化するようにしたので、輝度分布の変動に左右されないフィルタ生成が可能となる。なお、実施の形態3の説明では、特定の観測諸元パラメータ値として入射角を例に挙げたが、その場合に限らず、他の特定の観測諸元パラメータ値の変動に伴う輝度分布変動を補償するために、高輝度領域拡張の際の輝度値を正規化するようにしてもよい。また、実施の形態1,2においても、正規化を行ってもよく、その場合も同様の効果が得られる。
【0053】
なお、この発明は、上記各実施の形態1〜3に限定されるものではなく、各実施の形態1〜3の可能な組み合わせをすべて含むことは云うまでもない。
【符号の説明】
【0054】
1 教師画像データファイル、2 観測画像データファイル、3 画像前処理部、4 教師画像拡張部、5 種類判定フィルタ生成部、6 画像照合部、7 種類判定結果ファイル、F 種類判定フィルタ、K 拡張後教師画像データ、L 教師画像データ、P 前処理後画像データ、R 種類判定結果、T 観測画像データ。
【技術分野】
【0001】
この発明は目標類識別装置に関し、特に、種類未知の目標のレーダ観測画像データを対象に、目標種別を判定するための目標類識別装置に関するものである。
【背景技術】
【0002】
従来行われてきた目標類識別方法としては、レーダ観測で得られた静止目標の観測画像データに対し、事前に得られている各機種の教師画像とのパターンマッチングを行い、目標種別を判定する方法が知られている。教師画像は、一般的に、シミュレーション画像(諸元既知)もしくは実画像(一部の諸元未知)のいずれかとする。
【0003】
非特許文献1に記載の手法では、同一目標に対する観測諸元(目標主軸方向(向き))が異なる複数画像を統合して類識別フィルタを生成する。
【0004】
フィルタ統合の前処理としては、輝度調整、大きさの正規化、中心位置合わせ等の処理を行う。
【0005】
非特許文献1に記載の手法は、目標主軸方向等のパラメータ推定を行わずに、様々な向きの画像を統合することにより、向きの異なる画像に対応でき、また、教師画像とのマッチングではなく、フィルタとのマッチングを行うことにより、教師画像の選択に性能が依存しないという特徴がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】Rajesh K. Shenoy,“Object detection and classification in SAR images using MINACE correlation filters”, A project report for the degree of Master of Science, Carnegie Mellon University, Department of Electrical and Computer Engineering, April 10,1995
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の目標類識別装置では、目標主軸方向が異なる画像間でフィルタを生成する場合、原理的には、目標を離散的に回転移動した画像を組み合わせたフィルタが生成される。
【0008】
図2に、従来技術における目標主軸方向の異なる2教師画像によるフィルタ生成例を示す。ドットで塗りつぶされた、黒っぽい丸及び白っぽい丸が高輝度点を表す(以下、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも、輝度値が高いとする)。目標Aに対する目標主軸方向の異なる教師画像1(図2(a))と教師画像2(図2(b))から目標Aの種類判定フィルタ(図2(c))が生成される。すなわち、図2(c)に示す目標Aの種類判定フィルタは、図2(a)および(b)の教師画像1,2を組み合わせたものである。
【0009】
従来方法では、フィルタ生成時に様々な目標主軸方向(向き)の画像が得られていない場合、フィルタ生成に用いた教師画像と種類判定対象である観測画像との目標主軸方向(向き)差が大きい場合には、フィルタと分布状況が大きく異なり、対応できない。また、目標主軸方向差が小さい場合であっても、離散的な分布点に基づき生成されたフィルタでは、教師画像と観測画像の目標主軸方向差が開くほど、フィルタへの適合度が下がる傾向にある、という課題があった。
【0010】
さらに、観測諸元としては目標主軸方向の他に、撮像日時、航空機/衛星等に搭載されたレーダから送信される電波の入射角、偏波、分解能等が考えられる。これらの観測諸元の異なる画像、特に入射角差が大きい画像間では、同一機種であっても、倒れこみと呼ばれる現象により、レーダ観測画像の輝度分布(輝度値、分布位置)等が異なる。
【0011】
図3〜4に従来技術における入射角の異なる2教師画像によるフィルタ生成例を示す。図3が、入射角差が比較的小さい2教師画像によるフィルタ生成、図4が、入射角差が比較的大きい2教師画像によるフィルタ生成の例である。図3,4においても、黒丸及び白丸が、高輝度点を表す(黒丸は、白丸よりも輝度値が高いとする)。
【0012】
図3において、目標Bに対する入射角の異なる教師画像1(図3(a))と教師画像2(図3(b))から目標Bの種類判定フィルタ(図3(c))が生成される。同様に、図4では、目標Bに対する入射角の異なる教師画像3(図4(a))と教師画像4(図4(b))から目標Bの種類判定フィルタ(図4(c))が生成される。
【0013】
入射角の異なる画像間でフィルタ生成を行った場合、図4のように入射角差が比較的大きい場合は特に、輝度分布が発散して、その結果、異機種との適合度も高くなり、誤検出が発生しやすくなる。また図3のように、入射角差が比較的小さい画像間で生成したフィルタであっても、入射角は離散的に分布し、それに応じて輝度分布も変動するため、フィルタ適用画像との入射角差が開くほど、フィルタへの適合度が下がる傾向にある、という課題があった。
【0014】
この発明は、かかる課題を解決するためになされたものであり、観測諸元パラメータの離散的分布の影響を補い、適合度の高いフィルタを生成して、高精度な目標類識別装置を得ることを目的とする。
【課題を解決するための手段】
【0015】
この発明は、観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、上記観測目標の種類判定結果を格納する種類判定結果ファイルとを備えたことを特徴とする目標類識別装置である。
【発明の効果】
【0016】
この発明は、観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、上記観測目標の種類判定結果を格納する種類判定結果ファイルとを備えたことを特徴とする目標類識別装置であるので、観測諸元パラメータの離散的分布の影響を補い、適合度の高いフィルタを生成して、高精度な種類判定を行うことを可能にする。
【図面の簡単な説明】
【0017】
【図1】この発明の実施の形態1に係る目標類識別装置の構成を示すブロック図である。
【図2】従来技術による種類判定フィルタ生成例を示す説明図である。
【図3】従来技術による種類判定フィルタ生成例を示す説明図である。
【図4】従来技術による種類判定フィルタ生成例を示す説明図である。
【図5】この発明の実施の形態1による種類判定フィルタ生成例を示す説明図である。
【図6】この発明の実施の形態2による種類判定フィルタ生成例を示す説明図である。
【図7】この発明の実施の形態3による種類判定フィルタ生成例を示す説明図である。
【図8】この発明の実施の形態3による種類判定フィルタ生成例を示す説明図である。
【発明を実施するための形態】
【0018】
実施の形態1.
図1は、この発明の実施の形態1に係る目標類識別装置の構成を示すブロック図である。図1に示すように、本実施の形態1に係る目標類識別装置は、様々な観測条件で得られた目標の複数の教師画像データである教師画像データ群とその観測諸元データを格納する教師画像データファイル1と、種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイル2と、教師画像データ群に対して位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データ群を生成する画像前処理部3と、前処理後教師画像データ群に対し、教師画像データ群の観測諸元の離散的分布を補うための拡張を行い、拡張後教師画像データ群を生成する教師画像拡張部4と、拡張後教師画像データ群から種類判定フィルタを生成する種類判定フィルタ生成部5と、種類判定対象である観測画像データと種類判定フィルタとの照合を行い、観測目標の種類判定を行う画像照合部6と、観測目標の種類判定結果を格納する種類判定結果ファイル7とを備えている。
【0019】
なお、図1には示されていないが、観測画像データファイル2の入力側には、撮像装置および信号処理装置が接続されている。信号処理装置は、撮像装置で撮像された観測画像を基に観測画像データTを算出し、観測画像データファイル2に格納する。観測画像データファイル2には、観測画像データTの観測諸元データも同時に格納される。なお、観測諸元データとしては、例えば、観測時の観測レーダの送信電波の入射角、観測レーダの視線方向、目標主軸方向、観測日時、観測所要時間、観測地域、観測レーダの分解能や観測モード(多偏波観測等)などが挙げられる。
【0020】
また、教師画像データファイル1は、事前に様々な観測条件で目標を観測することによって得られた、計算機等に蓄積されている種類既知の目標画像データ、もしくは、計算機シミュレーションで生成された各目標の画像データからなる、教師画像データLを格納している。教師画像データファイル1には、教師画像データLの観測諸元データも同時に格納される。
【0021】
種類判定結果ファイル7は、後述する画像照合部6によって得られる種類判定結果データRを格納する。
【0022】
画像前処理部3は、教師画像データファイル1からの教師画像データLを入力情報とし、教師画像データLに対して、輝度調整、大きさの正規化、中心位置合わせ等の前処理を行い、前処理後の画像を前処理後画像データPとして出力する。
【0023】
教師画像拡張部4は、画像前処理部3から出力される前処理後画像データPに対して高輝度点領域の拡張を行い、拡張後教師画像データKを生成する。
【0024】
種類判定フィルタ生成部5は、教師画像拡張部4から出力される拡張後教師画像データKから種類判定フィルタFを生成する。
【0025】
画像照合部6は、種類判定フィルタ生成部5から出力される種類判定フィルタFを用いて、観測画像データファイル2に格納された観測画像データTの種類判定を行い、種類判定結果R(全体の出力情報)を生成し、種類判定結果ファイル7に格納する。
【0026】
次に、図5の説明図を参照しながら、図1に示した各機能ブロック3〜6の動作について、さらに具体的に説明する。
【0027】
まず、画像前処理部3は、教師画像データLを教師画像データファイル1から読み出して、当該教師画像データLを対象として、例えばLOG法等による輝度調整を行う。LOG法とは、画像の輝度の対数をとることにより、輝度差(濃淡差、振幅差)を小さくする方法であり、画像の視認性を向上させる。次に、1画素あたりの目標の大きさが、観測諸元に依存しないよう、事前に得られている各画像の観測諸元に基づき、スケール合わせる処理を行う。すなわち、大きさの正規化を行う。さらに、中心位置合わせとしては、教師画像の中から、基準となる画像である基準画像を任意に選定し、基準画像と各教師画像とを、1画素ずつずらしながら、重ね合わせを行い、基準画像と教師画像との相関係数が最大となったところを位置合わせ点とする。これらの処理を総じて前処理と呼ぶ。画像前処理部3は、こうした教師画像データLを対象とした前処理によって得られる画像データを、前処理後画像データPとして出力する。
【0028】
続いて、教師画像拡張部4では、教師画像データの観測諸元の離散的分布を補うために、画像前処理部3から出力された前処理後画像データPを対象として、各高輝度点を中心に高輝度領域の拡張を行う。高輝度領域の拡張は、中心となる高輝度点Cの近傍のN個の近傍画素の輝度値を、高輝度点Cと同じ輝度値に変更する、あるいは、高輝度点Cの輝度値を最大値として、N個の近傍画素の輝度値を、高輝度点Cからの距離に反比例した値に設定するなどの方法がある。近傍画素の個数Nは、事前に指定、もしくは、オペレータによって設定される、あるいは、目標画像の総画素数等から事前に与えられた計算式に基づき自動的に算出する方法等がある。輝度領域拡張時に、他の高輝度点との拡張領域の重複がある場合は、たとえば、それぞれの輝度値のうち、最大の値に設定する。
【0029】
図5は、高輝度領域の拡張例を示しており、ドットで塗りつぶされた、黒っぽい丸及び白っぽい丸が高輝度点を表す(以下、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。領域拡張対象となる高輝度点は、事前に設定された輝度しきい値Sb以上の輝度値を持つ画素、あるいは、目標画像内の輝度上位M個の画素などの方法で決定する。輝度しきい値Sbや輝度上位画素数Mは、事前に指定、もしくは、オペレータによって設定される、あるいは、目標画像の総画素数や最大輝度値等から、事前に与えられた計算式に基づき自動的に算出する等の設定方法等がある。目標Aに対する教師画像1(図5(a))と教師画像2(図5(b))に対し、各高輝度点の近傍のN個の画素を新たに高輝度領域とし(図5(c),図5(d))、それらを拡張後教師画像データEとして出力する。各高輝度点を中心とした矩形領域が拡張後の高輝度領域を表す。
【0030】
続いて、種類判定フィルタ生成部5では、拡張後教師画像データEを対象に、種類判定フィルタFを生成する。具体的には、各拡張後教師画像データEを二次元フーリエ変換後、ラスタ走査によりベクトル化して教師画像ベクトルとし、教師画像ベクトル間の内積行列を求める。内積行列と各教師画像ベクトルの重み値からなるベクトルとの積が、全要素1のベクトルになるよう、各教師画像ベクトルの重み値を求める。算出された各教師画像ベクトルの重み値を用いて、重み付き教師画像ベクトルの和を求め、フィルタベクトルとする。以上の手順により、フィルタベクトルと全教師画像との相関がすべて1になるように、フィルタベクトル(すなわち、種類判定フィルタF)が算出される。図5(e)に、目標Aの種類判定フィルタFを示す。
【0031】
なお、上記例では複数の拡張後教師画像データEを統合して、種類判定フィルタFを生成したが、各拡張後教師画像データEを、そのまま、それぞれ独立した種類判定フィルタとして用いても良い。
【0032】
最後に画像照合部6では、観測画像データファイル2から種類判定対象である観測画像データを読み出し、当該観測画像データTと種類判定フィルタFとのパターンマッチング等により、種類判定を行う。パターンマッチングでは、観測画像データTと種類判定フィルタFとを1画素ずつずらしながら、相関係数を算出し、最も相関係数が高い位置での相関係数を求め、求めた相関係数が、事前に設定された種類判定しきい値Sr以上であれば、該当機種(種類)と判定し、種類判定結果Rとして出力するとともに、種類判定結果Rを種類判定結果ファイル7に格納する。
【0033】
なお種類判定しきい値Srは、たとえば種類判定フィルタF生成の際に、事前に得られている種類既知の画像データのうち、フィルタ算出対象外である画像データのフィルタへの適合の度合を、たとえば平均正答率等から判定し、最も適合の度合いが高い値に設定する。
【0034】
以上のように、本実施の形態1に係る目標類識別装置では、教師画像拡張部4において、教師画像データの高輝度領域を拡張することにより、諸元パラメータの離散的分布の影響で離散的に点在する高輝度点が補間され、諸元データの分布状況に依存しない汎用的な種類判定フィルタの生成が可能となる。また、高輝度領域の拡張の際に、高輝度点からの距離に応じて輝度値を設定することにより、教師画像の分布点を中心とした重み付き高輝度領域拡張が可能となり、高輝度領域の発散による、誤検出の発生を抑えることができる。さらに、事前に得られる諸元毎の教師画像数が限定される場合でも、諸元の異なる教師画像間の統合により、フィルタ生成が可能となるので、適合度の高いフィルタを得ることができる。
【0035】
実施の形態2.
本実施の形態に係る目標類識別装置の構成は、上述の実施の形態1で説明した図1の構成と基本的に同じであるため、図1を参照することとし、ここでは説明を省略する。また、本実施の形態2においては、教師画像拡張部4の動作のみが実施の形態1と異なり、他の動作は同じであるため、以下では、実施の形態1と異なる動作を中心に説明する。
【0036】
上述の実施の形態1(図1、図5)では、教師画像拡張部4において、高輝度点を中心に近傍画素に高輝度領域を拡張したが、離散的分布を考慮すべき観測諸元パラメータの変動予測に合わせて、高輝度点の分布点を予測して、回転方向に高輝度領域を拡張してもよい。本実施の形態2においては、その場合について説明する。
【0037】
たとえば、変動が予測される諸元パラメータとして、目標主軸方向を考える。離散的に分布する目標主軸方向を補間する方法として、目標の回転移動による高輝度点の軌跡を用いる。具体的には、各教師画像において、輝度上位M個の高輝度点の位置から回転中心点を決定し(たとえば、輝度上位M個の高輝度点からなる凸包の中心点、あるいは、輝度上位M個の高輝度点の重心、等)、各高輝度点に対し、角度±θの回転移動を行い、高輝度点の回転移動軌跡で定義される領域を高輝度領域として拡張する。ここで、θは、事前に指定される、もしくは、オペレータにより設定される、あるいは、主軸方向が既知、もしくは、推定可能な教師画像データの主軸方向情報(平均角度差等)を用いて、事前に与えられた計算式により自動的に算出する等の設定方法が考えられる。
【0038】
図6に回転方向への高輝度領域拡張例を示す。図6において、ドットで塗りつぶされた黒っぽい丸及び白っぽい丸が高輝度点を表す(以下では、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。また、図6における教師画像1,2は、画像前処理部3における前処理が行われているものとする。画像前処理部3における前処理までの動作は、実施の形態1と同じである。教師画像拡張部4は、画像前処理部3で前処理された、目標Aに対する目標主軸方向の異なる教師画像1(図6(a))と教師画像2(図6(b))に対し、それぞれの輝度上位M個の高輝度点の位置から回転の中心点(☆)を求め、各高輝度点に対し、当該中心点を中心とした角度±θの回転移動を行って(図6(c),図6(d))、各高輝度点の回転移動軌跡で定義される領域を高輝度領域として拡張して、拡張後教師画像データEを生成する。図6(c),(d)における各高輝度点を中央に含む帯状領域が、各高輝度点の回転移動軌跡で定義される領域であり、すなわち、本実施の形態における拡張後の高輝度領域である。
【0039】
次に、種類判定フィルタ生成部5が、図6(c),(d)に示す拡張後教師画像データEを統合させて、目標Aの種類判定フィルタF(図6(e))を生成する。フィルタ生成手順としては、実施の形態1と同様に行えばよい。なお、種類判定フィルタFは、複数の拡張後教師画像データを必ずしも統合する必要はなく、実施の形態1同様、各拡張後教師画像データ(図6(c),(d))を、そのまま種類判定フィルタFとしても良い。画像照合部6では、この種類判定フィルタFを用いて種類判定を行い、種類判定結果Rを種類判定ファイル7に格納する。種類判定フィルタ生成部5以降の動作は、実施の形態1と基本的に同じである。
【0040】
また、高輝度領域の輝度値に関しても、実施の形態1同様、高輝度点の輝度値と等しくする、あるいは、高輝度点の輝度値を最大値として、高輝度点からの距離に反比例した値に設定してもよい。
【0041】
以上のように、この発明の実施の形態2によれば、上記の実施の形態1と同様の効果が得られる。本実施の形態2においては、教師画像拡張部4において、観測諸元の変動予測に合わせて、高輝度点の分布点を予測して、回転方向に高輝度領域を拡張するようにしたので、高輝度領域の拡張範囲が限定され、誤検出の発生確率をおさえることができる。
【0042】
実施の形態3.
本実施の形態に係る目標類識別装置の構成は、上述の実施の形態1,2で説明した図1の構成と基本的に同じであるため、図1を参照することとし、ここでは説明を省略する。また、本実施の形態3においては、教師画像拡張部4の動作のみが実施の形態1と異なり、他の動作は同じであるため、以下では、実施の形態1と異なる動作を中心に説明する。
【0043】
上述の実施の形態1〜2(図1、図5〜6)では、教師画像拡張部4において、高輝度点を中心に近傍画素に高輝度領域を拡張するか、あるいは、回転方向に高輝度領域を拡張したが、回転移動のような比較的一律な高輝度点の移動ではなく、個々の高輝度点間の輝度値の変動や、あるいは、移動方向は同じであるが、移動距離が高輝度点ごとに異なる等の状況もあるので、それらの状況を想定して、移動距離も考慮した、特定の方向への高輝度領域の拡張を行ってもよい。本実施の形態3においては、その場合について説明する。
【0044】
たとえば、変動が予測される諸元パラメータとして、衛星等に搭載された観測レーダの軌道によって定義される、送信電波の入射角を考える。入射角の変動に伴い、倒れこみと呼ばれる現象が発生することにより、各高輝度点の輝度値及び分布位置も変動する。ここで倒れこみでは、高輝度点の輝度位置はレーダからの視線方向に移動し、また、高輝度点の移動距離は、電波の反射点の高さ方向の位置(すなわち目標上の反射点の地上からの高さ)に応じて決まることがわかっている。そこで、教師画像の各高輝度点に対し、レーダからの視線方向への平行移動を行い、高輝度点の平行移動軌跡で定義される領域を、高輝度領域として拡張する。
【0045】
図7に視線方向への高輝度領域拡張例を示す。ここで、対象とする2つの教師画像は、比較的、入射角差が小さい場合を想定している。図7において、ドットで塗りつぶされた黒っぽい丸及び白っぽい丸が高輝度点を表す(以下では、黒っぽい丸を黒丸、白っぽい丸を白丸と呼ぶ。黒丸は、白丸よりも輝度値が高いとする)。また、図7における教師画像1,2は、画像前処理部3における前処理が行われているものとする。画像前処理部3における前処理までの動作は、実施の形態1と同じである。教師画像拡張部4は、画像前処理部3で前処理された、目標Bに対する入射角の異なる教師画像1(図7(a))と教師画像2(図7(b))を対象に、各高輝度点に対し、視線方向に距離±αの平行移動を行い、高輝度点の平行移動軌跡で定義される略々矩形の帯状領域を求め(図7(c),図7(d))、それを拡張後の高輝度領域とした拡張後教師画像データEを生成する。図7(c),(d)において、各高輝度点を中央に含む帯状領域が本実施の形態における拡張後の高輝度領域を表す。ここで、各高輝度点の移動距離αは、事前に反射点の高さがある程度予測可能な場合には、たとえば、事前に得られている反射点高さと倒れこみ距離の分布状況データに基づき、移動距離を予測して設定する。反射点高さが予測できない場合には、目標の全体形状から予測される倒れこみ距離範囲を指標に、たとえば、その中央値もしくは最大値等を設定する。
【0046】
次に、種類判定フィルタ生成部5が、拡張後教師画像データEから、目標Bの種類判定フィルタF(図7(e))を生成する。フィルタ生成手順としては、実施の形態1と同様に行えばよい。なお、種類判定フィルタFは、実施の形態1同様、複数の拡張後教師画像データEを統合して生成せずに、各拡張後教師画像データを、そのまま種類判定フィルタFとしても良い。画像照合部6では、この種類判定フィルタFを用いて、種類判定を行い、種類判定結果Rを種類判定ファイル7に格納する。種類判定フィルタ生成部5以降の動作は、実施の形態1と基本的に同じである。
【0047】
なお、上記図7の例では、入射角差が比較的小さい場合を対象としているが、図8(a),(b)に示す教師画像3及び教師画像4のように、教師画像の入射角差の開きが比較的大きい場合には、複数の拡張後教師画像データを対象といたフィルタ生成により、高輝度領域の発散が起こりうる。
【0048】
ここで、入射角はレーダ観測諸元として、観測時に与えられる情報であることを踏まえると、あえて入射角差が大きい教師画像間でのフィルタ生成を行わずに、独立したフィルタとする方法も考えられる。すなわち、フィルタ生成の際の入射角統合範囲を示す情報である入射角統合情報を事前に定義し、入射角統合情報に基づき入射角をグルーピングし、入射角グループごとにフィルタを生成する(図8(c)及び図8(d))ようにしてもよい。
【0049】
なお、高輝度領域の輝度値に関しては、入射角の違いによる輝度分布変動を考慮して、事前に設定された輝度正規化しきい値Sn以上の高輝度点の輝度を、すべて一様な値(例えばSn)に正規化し(輝度正規化値とする)、拡張高輝度領域内の輝度値も輝度正規化値に設定する方法が考えられる。これにより、輝度分布の変動に左右されないフィルタ生成が可能となる。
【0050】
以上のように、この発明の実施の形態3によれば、上記の実施の形態1と同様の効果が得られる。本実施の形態3においては、教師画像拡張部4は、移動距離も考慮した、特定の方向への高輝度領域拡張を行うことにより、高輝度領域の拡張範囲が限定され、誤検出の発生確率をおさえることができる。
【0051】
また、実施の形態3においては、教師画像データを入射角ごとにグルーピングして、グループごとに種類判定フィルタを生成するようにしたので、入射角差の大きい場合に、個々の入射角グループの輝度分布状況に応じたフィルタ生成が可能となる。なお、ここでは、特定の観測諸元パラメータ値として入射角を例に挙げたが、その場合に限らず、他の観測諸元パラメータ値ごとにグルーピングを行ってもよい。また、実施の形態1,2においても、グルーピングを行ってもよく、その場合も同様の効果が得られる。
【0052】
また、本実施の形態3においては、入射角の変動に伴う輝度分布変動を考慮して、高輝度領域拡張の際の輝度値を正規化するようにしたので、輝度分布の変動に左右されないフィルタ生成が可能となる。なお、実施の形態3の説明では、特定の観測諸元パラメータ値として入射角を例に挙げたが、その場合に限らず、他の特定の観測諸元パラメータ値の変動に伴う輝度分布変動を補償するために、高輝度領域拡張の際の輝度値を正規化するようにしてもよい。また、実施の形態1,2においても、正規化を行ってもよく、その場合も同様の効果が得られる。
【0053】
なお、この発明は、上記各実施の形態1〜3に限定されるものではなく、各実施の形態1〜3の可能な組み合わせをすべて含むことは云うまでもない。
【符号の説明】
【0054】
1 教師画像データファイル、2 観測画像データファイル、3 画像前処理部、4 教師画像拡張部、5 種類判定フィルタ生成部、6 画像照合部、7 種類判定結果ファイル、F 種類判定フィルタ、K 拡張後教師画像データ、L 教師画像データ、P 前処理後画像データ、R 種類判定結果、T 観測画像データ。
【特許請求の範囲】
【請求項1】
観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、
複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、
種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、
上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、
上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、
上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、
上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、
上記観測目標の種類判定結果を格納する種類判定結果ファイルと
を備えたことを特徴とする目標類識別装置。
【請求項2】
上記教師画像拡張部は、上記前処理後教師画像データ内の高輝度点の位置に基づき、それらの高輝度点の回転の中心点を求め、各高輝度点に対し当該中心点を中心とする所定の角度の回転移動を行い、上記高輝度点の回転移動軌跡で定義される領域を拡張後の高輝度領域として、高輝度領域を拡張させることを特徴とする請求項1に記載の目標類識別装置。
【請求項3】
上記教師画像拡張部は、上記前処理後教師画像データ内の各高輝度点に対し、観測時の視線方向に基づく特定の方向へ所定の距離の平行移動を行い、上記高輝度点の平行移動軌跡で定義される領域を拡張後の高輝度領域として、高輝度領域を拡張させることを特徴とする請求項1に記載の目標類識別装置。
【請求項4】
前記教師画像拡張部は、上記前処理後教師画像データ内の各高輝度点からの距離に応じて高輝度領域の輝度値を変化させることにより高輝度領域の拡張を行うことを特徴とする請求項1に記載の目標類識別装置。
【請求項5】
前記教師画像拡張部は、上記教師画像データを特定の観測諸元パラメータ値に応じてグルーピングして、グループごとに上記種類判定フィルタを生成することを特徴とする請求項1に記載の目標類識別装置。
【請求項6】
前記教師画像拡張部は、特定の観測諸元パラメータの変動に伴う輝度分布変動を補償するために、各高輝度点の輝度値を正規化することを特徴とする請求項1に記載の目標類識別装置。
【請求項1】
観測目標の観測画像データを対象に上記観測目標の種類を判定するための目標類識別装置であって、
複数の観測条件での観測により得られた観測目標の教師画像データからなる教師画像データ群とその観測諸元データを格納する教師画像データファイルと、
種類判定対象となる観測画像データとその観測諸元データを格納する観測画像データファイルと、
上記教師画像データに対して、位置あわせ等のフィルタ生成前の前処理を行い、前処理後の前処理後教師画像データを生成する画像前処理部と、
上記前処理後教師画像データに対し、上記前処理後教師画像データの観測諸元の離散的分布を補うための高輝度領域の拡張を行い、拡張後教師画像データを生成する教師画像拡張部と、
上記拡張後教師画像データから種類判定フィルタを生成する種類判定フィルタ生成部と、
上記観測画像データと上記種類判定フィルタとの照合を行い、上記観測目標の種類判定を行う画像照合部と、
上記観測目標の種類判定結果を格納する種類判定結果ファイルと
を備えたことを特徴とする目標類識別装置。
【請求項2】
上記教師画像拡張部は、上記前処理後教師画像データ内の高輝度点の位置に基づき、それらの高輝度点の回転の中心点を求め、各高輝度点に対し当該中心点を中心とする所定の角度の回転移動を行い、上記高輝度点の回転移動軌跡で定義される領域を拡張後の高輝度領域として、高輝度領域を拡張させることを特徴とする請求項1に記載の目標類識別装置。
【請求項3】
上記教師画像拡張部は、上記前処理後教師画像データ内の各高輝度点に対し、観測時の視線方向に基づく特定の方向へ所定の距離の平行移動を行い、上記高輝度点の平行移動軌跡で定義される領域を拡張後の高輝度領域として、高輝度領域を拡張させることを特徴とする請求項1に記載の目標類識別装置。
【請求項4】
前記教師画像拡張部は、上記前処理後教師画像データ内の各高輝度点からの距離に応じて高輝度領域の輝度値を変化させることにより高輝度領域の拡張を行うことを特徴とする請求項1に記載の目標類識別装置。
【請求項5】
前記教師画像拡張部は、上記教師画像データを特定の観測諸元パラメータ値に応じてグルーピングして、グループごとに上記種類判定フィルタを生成することを特徴とする請求項1に記載の目標類識別装置。
【請求項6】
前記教師画像拡張部は、特定の観測諸元パラメータの変動に伴う輝度分布変動を補償するために、各高輝度点の輝度値を正規化することを特徴とする請求項1に記載の目標類識別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−127920(P2012−127920A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−282120(P2010−282120)
【出願日】平成22年12月17日(2010.12.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月17日(2010.12.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]