
目的地の音声案内制御装置および音声案内制御プログラム
【課題】 目的地までの誘導経路の案内とは異なるような方法で、ドライバーの目的地への運転を支援する技術を提供する。
【解決手段】 車両用ナビゲーション装置は、目的地および簡易案内タイミングの入力を受け付け(ステップ110および120)、その後、繰り返し、自車両の現在位置および自車両の現在の向きを特定する(ステップ125)と共に、当該自車位置から当該目的地までの直線距離、および、当該自車向きを基準とする当該自車位置から当該目的地への相対方位を、地図データに基づいて特定する(ステップ130)。そして、受け付けた簡易案内タイミングが訪れる度に(ステップ150)、直前に特定した目的地までの直線距離および相対方位を、繰り返しスピーカ14に出力させる(ステップ160)。
【解決手段】 車両用ナビゲーション装置は、目的地および簡易案内タイミングの入力を受け付け(ステップ110および120)、その後、繰り返し、自車両の現在位置および自車両の現在の向きを特定する(ステップ125)と共に、当該自車位置から当該目的地までの直線距離、および、当該自車向きを基準とする当該自車位置から当該目的地への相対方位を、地図データに基づいて特定する(ステップ130)。そして、受け付けた簡易案内タイミングが訪れる度に(ステップ150)、直前に特定した目的地までの直線距離および相対方位を、繰り返しスピーカ14に出力させる(ステップ160)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地についての音声案内制御装置および音声案内制御プログラムに関する。
【背景技術】
【0002】
従来、車両の運転等による目的地への移動を支援する装置として、入力された目的地までの誘導経路を算出し、その算出した誘導経路に沿った経路案内を行うナビゲーション装置が広く利用されている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、目的地までの移動を支援する方法としては、かならずしも誘導経路を算出して案内する必要はなく、例えば目的地への大まかな方向等を報知することができれば、それも目的地への移動の支援となり得る。
【0004】
本発明は上記点に鑑み、目的地までの誘導経路の案内とは異なるような新たな方法で、ユーザの目的地への移動を支援する技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するための請求項1に記載の発明は、目的地の入力を受け付ける入力受付手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置である。
【0006】
このように、音声案内制御装置は、自位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0007】
ここで、自らの向きとは、音声案内制御装置が車両等の移動体に搭載されている場合は、その移動体の正面向きや進行方向をいい、音声案内制御装置が人に携帯されている場合は、音声案内制御装置自体の進行方向や向きをいう。
【0008】
ここで、自らの移動状態とは、音声案内制御装置が車両等の移動体に搭載されている場合は、その移動体の移動状態をいい、音声案内制御装置が人に携帯されている場合は、音声案内制御装置自体の移動状態をいう。また、移動状態の変化としては、例えば、移動による自らと道路との位置関係の変化、移動による自らの向きの変化等がある。
【0009】
また、請求項2に記載の発明は、請求項1に記載の音声案内制御装置において、前記報知制御手段は、前記自己向きの変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0010】
このようになっていることで、その音声出力が自己向きの変化に基づいたタイミングで行われるので、ユーザは、目的地への相対方位の変化という適切なタイミングで、報知を受けることができる。
【0011】
また、請求項3に記載の発明は、請求項1または2に記載の音声案内制御装置において、前記報知制御手段は、前記距離の変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0012】
このようになっていることで、ユーザは、その音声出力が自位置から目的地までの距離の変化という適切なタイミングで、報知を受けることができる。
【0013】
また、請求項4に記載の発明は、請求項3に記載の音声案内制御装置において、前記報知制御手段は、前記距離が短くなったことに基づいて、前記距離および前記相対方位を前記音声出力装置に出力させるタイミングの間隔を短くすることを特徴とする。
【0014】
一般に、目的地に自位置が近づけば近づくほど、移動両に対する相対方位の変化両が大きくなるので、このように、目的地までの距離が短くなると共に音声出力のタイミングの間隔が短くなることで、ユーザはきめ細かな報知を受けることができる。
【0015】
また、請求項5に記載の発明は、請求項1ないし4のいずれか1つに記載の音声案内制御装置において、前記報知制御手段は、移動している道路の種別に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0016】
このようになっていることで、道路種別毎に変わる状況に応じた報知タイミングの調整を行うことができる。
【0017】
また、請求項6に記載の発明は、請求項1ないし5のいずれか1つに記載の音声案内制御装置において、前記報知制御手段は、自位置が交差点の手前基準距離内に入ったことに基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0018】
このようになっていることで、ユーザは、当該交差点をどのように曲がればよいかについての判断を適切に行うことができるようになる。
【0019】
また、請求項7に記載の発明は、請求項1ないし6のいずれか1つに記載の音声案内制御装置において、前記目的地までの誘導経路を算出する誘導経路算出手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えたことを特徴とする。
【0020】
このようになっていることで、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0021】
また、請求項8に記載の発明は、目的地の入力を受け付ける入力受付手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置である。
【0022】
このように、音声案内制御装置は、自己向きを基準とする自位置から目的地への相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0023】
また、請求項9に記載の発明は、において、目的地の入力を受け付ける入力受付手段と、前記目的地までの誘導経路を算出する誘導経路算出手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置である。
【0024】
このように、音声案内制御装置は、自位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。また、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0025】
また、請求項10に記載の発明は、目的地の入力を受け付ける入力受付手段と、前記目的地までの誘導経路を算出する誘導経路算出手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置である。
【0026】
このように、音声案内制御装置は、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。また、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0027】
また、請求項11に記載の発明は、目的地の入力を受け付ける入力受付手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、および、前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0028】
また、請求項12に記載の発明は、において、目的地の入力を受け付ける入力受付手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、および、前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0029】
また、請求項13に記載の発明は、目的地の入力を受け付ける入力受付手段、前記目的地までの誘導経路を算出する誘導経路算出手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0030】
また、請求項14に記載の発明は、において、目的地の入力を受け付ける入力受付手段、前記目的地までの誘導経路を算出する誘導経路算出手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0031】
このように、本発明をプログラムとしても把握することができる。
【発明を実施するための最良の形態】
【0032】
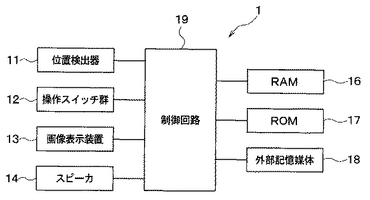
図1に、本実施形態に係る車両用ナビゲーション装置1のハードウェア構成を示す。この車両用ナビゲーション装置1は、位置検出器11、操作スイッチ群12、画像表示装置13、スピーカ14、RAM16、ROM17、外部記憶媒体18、制御回路19、を有している。
【0033】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。
【0034】
操作スイッチ群12は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、画像表示装置13の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの押下、タッチパネルのタッチに基づいた信号を制御回路19に出力する。
【0035】
画像表示装置13は、制御回路19から出力された映像信号に基づいた映像をユーザに表示する。表示映像としては、例えば現在地を中心とする地図等がある。
【0036】
外部記憶媒体18は、HDD等の不揮発性の記憶媒体であり、制御回路19が読み出して実行するプログラム、経路案内用の地図データ等を記憶している。
【0037】
地図データは、リンクおよびノードの位置、種別、ノードとリンクとの接続関係情報等を含む道路データ、および施設データを有している。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0038】
制御回路(コンピュータに相当する)19は、ROM17および外部記憶媒体18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM16、ROM17、および外部記憶媒体18から情報を読み出し、RAM16および外部記憶媒体18に対して情報の書き込みを行い、位置検出器11、操作スイッチ群12、画像表示装置13およびスピーカ14と信号の授受を行う。
【0039】
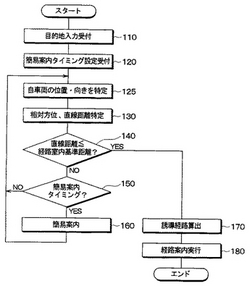
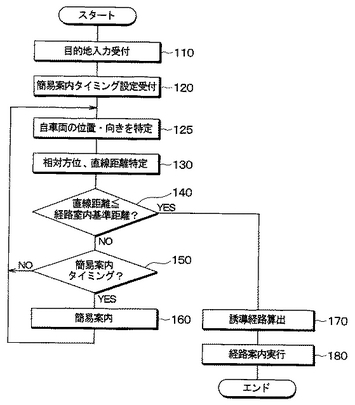
本実施形態においては、制御回路19は、図2にフローチャートとして示す音声案内制御プログラム100を、ユーザが操作スイッチ群12に対して所定の操作を行ったことに基づいて実行する。そして制御回路19は、この音声案内制御プログラム100の実行において、まずステップ110で、ユーザによる操作スイッチ群12を用いた目的地入力を受け付ける。入力される目的地としては、施設名称、地図上の特定の位置等がある。目的地の入力があると、続いてステップ120で、ユーザによる操作スイッチ群12を用いた簡易案内タイミングの設定入力を受け付ける。簡易案内タイミングの設定内容については後述する。
【0040】
簡易案内タイミングの設定入力があると、続いてステップ125で、自車両の現在位置(緯度、経度)および向き(東西南北)を特定する。自車両の現在位置は、位置検出器11からの信号に基づいて特定する。また、自車両の向きは、位置検出器11の地磁気センサやGPS受信機からの信号に基づいて特定してもよい。また、自車両のこれまでの走行軌跡から、自車両の現在の走行方向を特定し、その走行方向を自車両の向きとみなしてもよい。
【0041】
続いてステップ130では、現在位置から目的地までの相対方位、および、現在位置から目的地までの直線距離を、外部記憶媒体18中の地図データに基づいて特定する。ここで、相対方位は、自車両の向きを基準とする方位である。
【0042】
続いてステップ140では、ステップ130で特定した直線距離が、経路案内基準距離内であるか否かを判定する。経路案内基準距離は、あらかじめ外部記憶媒体18に記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよいし、ステップ120でユーザによる設定入力を受け付けることで決まる値であってもよい。直線距離が経路案内基準距離内であれば続いてステップ170を実行し、直線距離が経路案内基準距離を超えていれば続いてステップ150を実行する。
【0043】
ステップ150では、現在が、ステップ120で設定された簡易案内タイミングに該当するか否かを判定する。該当する場合、続いてステップ160を実行し、該当しない場合、続いて上述のステップ125の実行に戻る。
【0044】
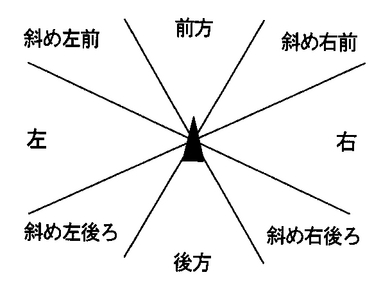
ステップ160では、直前のステップ130で特定した目的地までの直線距離および相対方位を報知する音声を、スピーカ14に音声として出力させる。ここで、報知する相対方位は、正確な角度であってもよいが、図3に示すように、前方、右、斜め左後ろ等、全方位を8つに分けた大まかな方向である方が、ユーザにとっては却ってわかり易い。出力させる音声としては、例えば「左斜め後ろ、1kmです」等が考えられる。なお、このステップ160において、特定した目的地までの直線距離および相対方位を、画像表示装置13に表示させてもよいし、させなくてもよい。ステップ160に続いては、再度ステップ125の実行に戻る。なお、制御回路19は、ステップ125〜160のループ、およびステップ125〜140のループを、例えば1分毎に1巡実行する。
【0045】
ステップ170では、現在の自車位置から目的地までの誘導経路を、ダイクストラ法等の周知の方法で算出する。
【0046】
続いてステップ180では、ステップ170で算出した誘導経路に沿った経路案内を行う。具体的には、外部記憶媒体18から地図データを読み出し、算出された誘導経路、目的地、現在位置等をこの地図データの示す地図上に重ねた画像を、画像表示装置13に出力し、案内交差点の手前に自車両が到達した等の必要時に、右折、左折等を指示する案内音声信号をスピーカ14に出力する。自車両が目的地に到達する等によって経路案内が終了すると、音声案内制御プログラム100の実行は終了する。
【0047】
以上のような音声案内制御プログラム100を制御回路19が実行することで、車両用ナビゲーション装置1は、目的地および簡易案内タイミングの入力を受け付け(ステップ110および120参照)、その後、繰り返し、自車両の現在位置および自車両の現在の向きを特定する(ステップ125参照)と共に、当該自車位置から当該目的地までの直線距離、および、当該自車向きを基準とする当該自車位置から当該目的地への相対方位を、地図データに基づいて特定する(ステップ130参照)。そして、ステップ120で受け付けた簡易案内タイミングが訪れる度に(ステップ150参照)、直前に特定した目的地までの直線距離および相対方位を、繰り返しスピーカ14に出力させる(ステップ160参照)。
【0048】
このようになっているので、車両用ナビゲーション装置1は、自車位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0049】
また、自車両から目的地までの直線距離が経路案内基準距離内に近づくと(ステップ140参照)、車両用ナビゲーション装置1は、簡易案内のための処理(ループ125〜160に相当する)を抜け、現在位置から目的地までの誘導経路を算出し(ステップ170参照)、その後誘導経路に沿った通常の経路案内を実行する(ステップ180参照)。このような車両用ナビゲーション装置1の作動により、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0050】
ここで、車両用ナビゲーション装置1がステップ120においてユーザの入力を受け付け、ステップ140で判定の基準として用いる、簡易案内簡易案内タイミングについて説明する。簡易案内タイミングは、車両の移動状態に基づいたタイミングとなっている。具体的には、(1)自車両の向きの変化に基づいたタイミング、(2)直線距離の変化に基づいたタイミング、(3)自位置が交差点(分岐点も含む)の手前基準距離内に入ったことに基づいたタイミング、(4)車両の走行している道路の種別に基づいたタイミング、およびこれらを複合的に組み合わせたタイミング等がある。
【0051】
(1)の、自車両の向きの変化に基づいたタイミングとしては、例えば、自車両の向きが、前回のステップ160で簡易案内を行ったときの向きから、基準角度以上変化したタイミングがある。なお、基準角度は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。また、東西南北の全方位を複数(例えば8つ)の方向区分に分け、自車両の向きがそれら区分間の境界を越えたときを、簡易案内タイミングとしてもよい。
【0052】
また、(2)の、直線距離の変化に基づいたタイミングとしては、例えば、直線距離が、前回ステップ160で簡易案内を行ったときから基準距離間隔だけ変化したタイミングがある。基準距離間隔は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。例えば、直線距離が10km以上のときは、基準距離間隔が2kmとなり、直線距離が5km〜10kmのときは、基準距離間隔が1kmとなり、直線距離が1km未満のときは、基準距離間隔が100mとなるという風に、直線距離が短くなると共に基準距離間隔も短くなるようになっていてもよい。このようになっていることで、ユーザはきめ細かな報知を受けることができる。
【0053】
また、(3)の、自位置が交差点の手前基準距離(例えば100メートル)内に入ったことに基づいたタイミングにおいて、手前基準距離は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。(3)のようなタイミングで簡易案内が行われることで、ユーザは、当該交差点をどのように曲がればよいかについての判断を適切に行うことができるようになる。
【0054】
また、(4)自車両の走行している道路の種別に基づいたタイミングとしては、主に、上記(1)〜(3)のタイミングと複合的に用いられる。例えば、自車両が高速道路を走行しているときは、上述の直線距離は相対方位が変化しても簡易案内タイミングとはならないようにしてもよい。また例えば、(3)における手前基準距離は、自車両が一般道路を走行している場合よりも、高速道路を走行している場合の方が長くなっていてもよい。なお、自車両が走行している道路の種別は、地図データに基づいて特定する。このように、自車両の走行している道路の種別に基づいて簡易案内タイミングを変更することで、道路種別毎に変わる状況に応じた報知タイミングの調整が実現する。
【0055】
簡易案内タイミングが以上のようになっていることで、ユーザは、適切なタイミングで、簡易案内による報知を受けることができる。
【0056】
なお、上記の実施形態において、車両用ナビゲーション装置1が音声案内制御装置に相当し、スピーカ14が音声出力装置に相当する。また、CPU19が、音声案内制御プログラム100のステップ110を実行することで、入力受付手段として機能し、ステップ125を実行することで第1特定手段として機能し、ステップ130を実行することで第2特定手段として機能し、ステップ150および160を実行することで、報知制御手段として機能し、ステップ170を実行することで誘導経路算出手段として機能し、ステップ180を実行することで経路案内制御手段として機能する。
【0057】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の構成は、上記実施形態のみに限定されるものではなく、本発明の各構成要素の機能を実現し得る種々の形態を包含するものである。
【0058】
例えば、本実施形態の車両用ナビゲーション装置1は、目的地までの直線距離と相対方位の両方の音声で報知するようになっているが、直線距離と相対方位のうち、目的地の相対方位のみ音声出力するようになっていてもよい。
【0059】
また、簡易案内タイミングは定期的なタイミングとなっていてもよい。
【0060】
また、ステップ180においては、制御回路19は、通常の誘導経路の案内と併せて、簡易案内を行うようになっていてもよい。また、ステップ170および180の誘導経路算出および経路案内は必ずしも行わずともよい。
【0061】
また、車両用ナビゲーション装置1は地図データを有するようになっているが、目的地を緯度、経度で入力するようになっていたり、入力した施設の緯度・経度位置情報を無線通信等によって取得するようになっていたりすれば、地図データは必ずしも必要ではない また、ステップ110においては、制御回路19は、ユーザに高速道路を利用するか否かの選択を促す音声または画像表示をスピーカ14または画像表示装置13に行わせ、そして、ユーザが高速道路を利用する旨の入力があった場合、目的地までに最適な高速道路の入り口インターチェンジと出口インターチェンジの名前を示す音声または画像表示をスピーカ14または画像表示装置13に行わせてもよい。
【0062】
また、上記実施形態においては、本発明の音声案内制御装置の一例として車両用ナビゲーション装置1が用いられているが、音声案内制御装置は、必ずしも車両に搭載されるものでなくともよく、人が携帯するものであってもよい。また、通常のナビゲーション機能を有していなくともよい。
【0063】
また、上記の実施形態においては、車両用ナビゲーション装置1が、本発明のナビゲーション装置の一例として挙げられているが、本発明のナビゲーションシステムは、車両用ナビゲーション装置に限らず、例えば、人が携帯できるような携帯型ナビゲーション装置としても実現可能である。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施携帯にかかる車両用ナビゲーション装置1のハードウェア図である。
【図2】音声案内制御プログラム音声案内制御プログラム100のフローチャートである。
【図3】相対方位の種類を示す図である。
【符号の説明】
【0065】
1…車両用ナビゲーション装置、11…位置検出器、12…操作スイッチ群、
13…画像表示装置、14…スピーカ、16…RAM、17…ROM、
18…外部記憶媒体、19…制御回路、100…音声案内制御プログラム。
【技術分野】
【0001】
本発明は、目的地についての音声案内制御装置および音声案内制御プログラムに関する。
【背景技術】
【0002】
従来、車両の運転等による目的地への移動を支援する装置として、入力された目的地までの誘導経路を算出し、その算出した誘導経路に沿った経路案内を行うナビゲーション装置が広く利用されている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、目的地までの移動を支援する方法としては、かならずしも誘導経路を算出して案内する必要はなく、例えば目的地への大まかな方向等を報知することができれば、それも目的地への移動の支援となり得る。
【0004】
本発明は上記点に鑑み、目的地までの誘導経路の案内とは異なるような新たな方法で、ユーザの目的地への移動を支援する技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するための請求項1に記載の発明は、目的地の入力を受け付ける入力受付手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置である。
【0006】
このように、音声案内制御装置は、自位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0007】
ここで、自らの向きとは、音声案内制御装置が車両等の移動体に搭載されている場合は、その移動体の正面向きや進行方向をいい、音声案内制御装置が人に携帯されている場合は、音声案内制御装置自体の進行方向や向きをいう。
【0008】
ここで、自らの移動状態とは、音声案内制御装置が車両等の移動体に搭載されている場合は、その移動体の移動状態をいい、音声案内制御装置が人に携帯されている場合は、音声案内制御装置自体の移動状態をいう。また、移動状態の変化としては、例えば、移動による自らと道路との位置関係の変化、移動による自らの向きの変化等がある。
【0009】
また、請求項2に記載の発明は、請求項1に記載の音声案内制御装置において、前記報知制御手段は、前記自己向きの変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0010】
このようになっていることで、その音声出力が自己向きの変化に基づいたタイミングで行われるので、ユーザは、目的地への相対方位の変化という適切なタイミングで、報知を受けることができる。
【0011】
また、請求項3に記載の発明は、請求項1または2に記載の音声案内制御装置において、前記報知制御手段は、前記距離の変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0012】
このようになっていることで、ユーザは、その音声出力が自位置から目的地までの距離の変化という適切なタイミングで、報知を受けることができる。
【0013】
また、請求項4に記載の発明は、請求項3に記載の音声案内制御装置において、前記報知制御手段は、前記距離が短くなったことに基づいて、前記距離および前記相対方位を前記音声出力装置に出力させるタイミングの間隔を短くすることを特徴とする。
【0014】
一般に、目的地に自位置が近づけば近づくほど、移動両に対する相対方位の変化両が大きくなるので、このように、目的地までの距離が短くなると共に音声出力のタイミングの間隔が短くなることで、ユーザはきめ細かな報知を受けることができる。
【0015】
また、請求項5に記載の発明は、請求項1ないし4のいずれか1つに記載の音声案内制御装置において、前記報知制御手段は、移動している道路の種別に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0016】
このようになっていることで、道路種別毎に変わる状況に応じた報知タイミングの調整を行うことができる。
【0017】
また、請求項6に記載の発明は、請求項1ないし5のいずれか1つに記載の音声案内制御装置において、前記報知制御手段は、自位置が交差点の手前基準距離内に入ったことに基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする。
【0018】
このようになっていることで、ユーザは、当該交差点をどのように曲がればよいかについての判断を適切に行うことができるようになる。
【0019】
また、請求項7に記載の発明は、請求項1ないし6のいずれか1つに記載の音声案内制御装置において、前記目的地までの誘導経路を算出する誘導経路算出手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えたことを特徴とする。
【0020】
このようになっていることで、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0021】
また、請求項8に記載の発明は、目的地の入力を受け付ける入力受付手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置である。
【0022】
このように、音声案内制御装置は、自己向きを基準とする自位置から目的地への相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0023】
また、請求項9に記載の発明は、において、目的地の入力を受け付ける入力受付手段と、前記目的地までの誘導経路を算出する誘導経路算出手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置である。
【0024】
このように、音声案内制御装置は、自位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。また、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0025】
また、請求項10に記載の発明は、目的地の入力を受け付ける入力受付手段と、前記目的地までの誘導経路を算出する誘導経路算出手段と、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置である。
【0026】
このように、音声案内制御装置は、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。また、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0027】
また、請求項11に記載の発明は、目的地の入力を受け付ける入力受付手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、および、前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0028】
また、請求項12に記載の発明は、において、目的地の入力を受け付ける入力受付手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、および、前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0029】
また、請求項13に記載の発明は、目的地の入力を受け付ける入力受付手段、前記目的地までの誘導経路を算出する誘導経路算出手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0030】
また、請求項14に記載の発明は、において、目的地の入力を受け付ける入力受付手段、前記目的地までの誘導経路を算出する誘導経路算出手段、自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラムである。
【0031】
このように、本発明をプログラムとしても把握することができる。
【発明を実施するための最良の形態】
【0032】
図1に、本実施形態に係る車両用ナビゲーション装置1のハードウェア構成を示す。この車両用ナビゲーション装置1は、位置検出器11、操作スイッチ群12、画像表示装置13、スピーカ14、RAM16、ROM17、外部記憶媒体18、制御回路19、を有している。
【0033】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。
【0034】
操作スイッチ群12は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、画像表示装置13の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの押下、タッチパネルのタッチに基づいた信号を制御回路19に出力する。
【0035】
画像表示装置13は、制御回路19から出力された映像信号に基づいた映像をユーザに表示する。表示映像としては、例えば現在地を中心とする地図等がある。
【0036】
外部記憶媒体18は、HDD等の不揮発性の記憶媒体であり、制御回路19が読み出して実行するプログラム、経路案内用の地図データ等を記憶している。
【0037】
地図データは、リンクおよびノードの位置、種別、ノードとリンクとの接続関係情報等を含む道路データ、および施設データを有している。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0038】
制御回路(コンピュータに相当する)19は、ROM17および外部記憶媒体18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM16、ROM17、および外部記憶媒体18から情報を読み出し、RAM16および外部記憶媒体18に対して情報の書き込みを行い、位置検出器11、操作スイッチ群12、画像表示装置13およびスピーカ14と信号の授受を行う。
【0039】
本実施形態においては、制御回路19は、図2にフローチャートとして示す音声案内制御プログラム100を、ユーザが操作スイッチ群12に対して所定の操作を行ったことに基づいて実行する。そして制御回路19は、この音声案内制御プログラム100の実行において、まずステップ110で、ユーザによる操作スイッチ群12を用いた目的地入力を受け付ける。入力される目的地としては、施設名称、地図上の特定の位置等がある。目的地の入力があると、続いてステップ120で、ユーザによる操作スイッチ群12を用いた簡易案内タイミングの設定入力を受け付ける。簡易案内タイミングの設定内容については後述する。
【0040】
簡易案内タイミングの設定入力があると、続いてステップ125で、自車両の現在位置(緯度、経度)および向き(東西南北)を特定する。自車両の現在位置は、位置検出器11からの信号に基づいて特定する。また、自車両の向きは、位置検出器11の地磁気センサやGPS受信機からの信号に基づいて特定してもよい。また、自車両のこれまでの走行軌跡から、自車両の現在の走行方向を特定し、その走行方向を自車両の向きとみなしてもよい。
【0041】
続いてステップ130では、現在位置から目的地までの相対方位、および、現在位置から目的地までの直線距離を、外部記憶媒体18中の地図データに基づいて特定する。ここで、相対方位は、自車両の向きを基準とする方位である。
【0042】
続いてステップ140では、ステップ130で特定した直線距離が、経路案内基準距離内であるか否かを判定する。経路案内基準距離は、あらかじめ外部記憶媒体18に記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよいし、ステップ120でユーザによる設定入力を受け付けることで決まる値であってもよい。直線距離が経路案内基準距離内であれば続いてステップ170を実行し、直線距離が経路案内基準距離を超えていれば続いてステップ150を実行する。
【0043】
ステップ150では、現在が、ステップ120で設定された簡易案内タイミングに該当するか否かを判定する。該当する場合、続いてステップ160を実行し、該当しない場合、続いて上述のステップ125の実行に戻る。
【0044】
ステップ160では、直前のステップ130で特定した目的地までの直線距離および相対方位を報知する音声を、スピーカ14に音声として出力させる。ここで、報知する相対方位は、正確な角度であってもよいが、図3に示すように、前方、右、斜め左後ろ等、全方位を8つに分けた大まかな方向である方が、ユーザにとっては却ってわかり易い。出力させる音声としては、例えば「左斜め後ろ、1kmです」等が考えられる。なお、このステップ160において、特定した目的地までの直線距離および相対方位を、画像表示装置13に表示させてもよいし、させなくてもよい。ステップ160に続いては、再度ステップ125の実行に戻る。なお、制御回路19は、ステップ125〜160のループ、およびステップ125〜140のループを、例えば1分毎に1巡実行する。
【0045】
ステップ170では、現在の自車位置から目的地までの誘導経路を、ダイクストラ法等の周知の方法で算出する。
【0046】
続いてステップ180では、ステップ170で算出した誘導経路に沿った経路案内を行う。具体的には、外部記憶媒体18から地図データを読み出し、算出された誘導経路、目的地、現在位置等をこの地図データの示す地図上に重ねた画像を、画像表示装置13に出力し、案内交差点の手前に自車両が到達した等の必要時に、右折、左折等を指示する案内音声信号をスピーカ14に出力する。自車両が目的地に到達する等によって経路案内が終了すると、音声案内制御プログラム100の実行は終了する。
【0047】
以上のような音声案内制御プログラム100を制御回路19が実行することで、車両用ナビゲーション装置1は、目的地および簡易案内タイミングの入力を受け付け(ステップ110および120参照)、その後、繰り返し、自車両の現在位置および自車両の現在の向きを特定する(ステップ125参照)と共に、当該自車位置から当該目的地までの直線距離、および、当該自車向きを基準とする当該自車位置から当該目的地への相対方位を、地図データに基づいて特定する(ステップ130参照)。そして、ステップ120で受け付けた簡易案内タイミングが訪れる度に(ステップ150参照)、直前に特定した目的地までの直線距離および相対方位を、繰り返しスピーカ14に出力させる(ステップ160参照)。
【0048】
このようになっているので、車両用ナビゲーション装置1は、自車位置から目的地までの距離、および、自己向きを基準とする自位置から目的地への相対方位を、繰り返し音声出力装置に出力させるので、ユーザの目的地への移動を支援することができる。
【0049】
また、自車両から目的地までの直線距離が経路案内基準距離内に近づくと(ステップ140参照)、車両用ナビゲーション装置1は、簡易案内のための処理(ループ125〜160に相当する)を抜け、現在位置から目的地までの誘導経路を算出し(ステップ170参照)、その後誘導経路に沿った通常の経路案内を実行する(ステップ180参照)。このような車両用ナビゲーション装置1の作動により、ユーザは、目的地への移動の最終段階で、どの道路を通ればいいかを明確に把握することができるので、ユーザが正確に目的地に辿り付く可能性が高まる。
【0050】
ここで、車両用ナビゲーション装置1がステップ120においてユーザの入力を受け付け、ステップ140で判定の基準として用いる、簡易案内簡易案内タイミングについて説明する。簡易案内タイミングは、車両の移動状態に基づいたタイミングとなっている。具体的には、(1)自車両の向きの変化に基づいたタイミング、(2)直線距離の変化に基づいたタイミング、(3)自位置が交差点(分岐点も含む)の手前基準距離内に入ったことに基づいたタイミング、(4)車両の走行している道路の種別に基づいたタイミング、およびこれらを複合的に組み合わせたタイミング等がある。
【0051】
(1)の、自車両の向きの変化に基づいたタイミングとしては、例えば、自車両の向きが、前回のステップ160で簡易案内を行ったときの向きから、基準角度以上変化したタイミングがある。なお、基準角度は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。また、東西南北の全方位を複数(例えば8つ)の方向区分に分け、自車両の向きがそれら区分間の境界を越えたときを、簡易案内タイミングとしてもよい。
【0052】
また、(2)の、直線距離の変化に基づいたタイミングとしては、例えば、直線距離が、前回ステップ160で簡易案内を行ったときから基準距離間隔だけ変化したタイミングがある。基準距離間隔は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。例えば、直線距離が10km以上のときは、基準距離間隔が2kmとなり、直線距離が5km〜10kmのときは、基準距離間隔が1kmとなり、直線距離が1km未満のときは、基準距離間隔が100mとなるという風に、直線距離が短くなると共に基準距離間隔も短くなるようになっていてもよい。このようになっていることで、ユーザはきめ細かな報知を受けることができる。
【0053】
また、(3)の、自位置が交差点の手前基準距離(例えば100メートル)内に入ったことに基づいたタイミングにおいて、手前基準距離は、あらかじめ記憶された一定値であってもよいし、各種条件に基づいて変動する値であってもよいし、一定の範囲内でランダムに決まる値であってもよい。(3)のようなタイミングで簡易案内が行われることで、ユーザは、当該交差点をどのように曲がればよいかについての判断を適切に行うことができるようになる。
【0054】
また、(4)自車両の走行している道路の種別に基づいたタイミングとしては、主に、上記(1)〜(3)のタイミングと複合的に用いられる。例えば、自車両が高速道路を走行しているときは、上述の直線距離は相対方位が変化しても簡易案内タイミングとはならないようにしてもよい。また例えば、(3)における手前基準距離は、自車両が一般道路を走行している場合よりも、高速道路を走行している場合の方が長くなっていてもよい。なお、自車両が走行している道路の種別は、地図データに基づいて特定する。このように、自車両の走行している道路の種別に基づいて簡易案内タイミングを変更することで、道路種別毎に変わる状況に応じた報知タイミングの調整が実現する。
【0055】
簡易案内タイミングが以上のようになっていることで、ユーザは、適切なタイミングで、簡易案内による報知を受けることができる。
【0056】
なお、上記の実施形態において、車両用ナビゲーション装置1が音声案内制御装置に相当し、スピーカ14が音声出力装置に相当する。また、CPU19が、音声案内制御プログラム100のステップ110を実行することで、入力受付手段として機能し、ステップ125を実行することで第1特定手段として機能し、ステップ130を実行することで第2特定手段として機能し、ステップ150および160を実行することで、報知制御手段として機能し、ステップ170を実行することで誘導経路算出手段として機能し、ステップ180を実行することで経路案内制御手段として機能する。
【0057】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の構成は、上記実施形態のみに限定されるものではなく、本発明の各構成要素の機能を実現し得る種々の形態を包含するものである。
【0058】
例えば、本実施形態の車両用ナビゲーション装置1は、目的地までの直線距離と相対方位の両方の音声で報知するようになっているが、直線距離と相対方位のうち、目的地の相対方位のみ音声出力するようになっていてもよい。
【0059】
また、簡易案内タイミングは定期的なタイミングとなっていてもよい。
【0060】
また、ステップ180においては、制御回路19は、通常の誘導経路の案内と併せて、簡易案内を行うようになっていてもよい。また、ステップ170および180の誘導経路算出および経路案内は必ずしも行わずともよい。
【0061】
また、車両用ナビゲーション装置1は地図データを有するようになっているが、目的地を緯度、経度で入力するようになっていたり、入力した施設の緯度・経度位置情報を無線通信等によって取得するようになっていたりすれば、地図データは必ずしも必要ではない また、ステップ110においては、制御回路19は、ユーザに高速道路を利用するか否かの選択を促す音声または画像表示をスピーカ14または画像表示装置13に行わせ、そして、ユーザが高速道路を利用する旨の入力があった場合、目的地までに最適な高速道路の入り口インターチェンジと出口インターチェンジの名前を示す音声または画像表示をスピーカ14または画像表示装置13に行わせてもよい。
【0062】
また、上記実施形態においては、本発明の音声案内制御装置の一例として車両用ナビゲーション装置1が用いられているが、音声案内制御装置は、必ずしも車両に搭載されるものでなくともよく、人が携帯するものであってもよい。また、通常のナビゲーション機能を有していなくともよい。
【0063】
また、上記の実施形態においては、車両用ナビゲーション装置1が、本発明のナビゲーション装置の一例として挙げられているが、本発明のナビゲーションシステムは、車両用ナビゲーション装置に限らず、例えば、人が携帯できるような携帯型ナビゲーション装置としても実現可能である。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施携帯にかかる車両用ナビゲーション装置1のハードウェア図である。
【図2】音声案内制御プログラム音声案内制御プログラム100のフローチャートである。
【図3】相対方位の種類を示す図である。
【符号の説明】
【0065】
1…車両用ナビゲーション装置、11…位置検出器、12…操作スイッチ群、
13…画像表示装置、14…スピーカ、16…RAM、17…ROM、
18…外部記憶媒体、19…制御回路、100…音声案内制御プログラム。
【特許請求の範囲】
【請求項1】
目的地の入力を受け付ける入力受付手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置。
【請求項2】
前記報知制御手段は、前記自己向きの変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1に記載の音声案内制御装置。
【請求項3】
前記報知制御手段は、前記距離の変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1または2に記載の音声案内制御装置。
【請求項4】
前記報知制御手段は、前記距離が短くなったことに基づいて、前記距離および前記相対方位を前記音声出力装置に出力させるタイミングの間隔を短くすることを特徴とする請求項3に記載の音声案内制御装置。
【請求項5】
前記報知制御手段は、移動している道路の種別に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1ないし4のいずれか1つに記載の音声案内制御装置。
【請求項6】
前記報知制御手段は、自位置が交差点の手前基準距離内に入ったことに基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1ないし5のいずれか1つに記載の音声案内制御装置。
【請求項7】
前記目的地までの誘導経路を算出する誘導経路算出手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えたことを特徴とする請求項1ないし6のいずれか1つに記載の音声案内制御装置。
【請求項8】
目的地の入力を受け付ける入力受付手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置。
【請求項9】
目的地の入力を受け付ける入力受付手段と、
前記目的地までの誘導経路を算出する誘導経路算出手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置。
【請求項10】
目的地の入力を受け付ける入力受付手段と、
前記目的地までの誘導経路を算出する誘導経路算出手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置。
【請求項11】
目的地の入力を受け付ける入力受付手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、および、
前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項12】
目的地の入力を受け付ける入力受付手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、および、
前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項13】
目的地の入力を受け付ける入力受付手段、
前記目的地までの誘導経路を算出する誘導経路算出手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、
前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項14】
目的地の入力を受け付ける入力受付手段、
前記目的地までの誘導経路を算出する誘導経路算出手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、
前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項1】
目的地の入力を受け付ける入力受付手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置。
【請求項2】
前記報知制御手段は、前記自己向きの変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1に記載の音声案内制御装置。
【請求項3】
前記報知制御手段は、前記距離の変化に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1または2に記載の音声案内制御装置。
【請求項4】
前記報知制御手段は、前記距離が短くなったことに基づいて、前記距離および前記相対方位を前記音声出力装置に出力させるタイミングの間隔を短くすることを特徴とする請求項3に記載の音声案内制御装置。
【請求項5】
前記報知制御手段は、移動している道路の種別に基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1ないし4のいずれか1つに記載の音声案内制御装置。
【請求項6】
前記報知制御手段は、自位置が交差点の手前基準距離内に入ったことに基づいたタイミングで、前記距離および前記相対方位を繰り返し前記音声出力装置に出力させることを特徴とする請求項1ないし5のいずれか1つに記載の音声案内制御装置。
【請求項7】
前記目的地までの誘導経路を算出する誘導経路算出手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えたことを特徴とする請求項1ないし6のいずれか1つに記載の音声案内制御装置。
【請求項8】
目的地の入力を受け付ける入力受付手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段と、を備えた音声案内制御装置。
【請求項9】
目的地の入力を受け付ける入力受付手段と、
前記目的地までの誘導経路を算出する誘導経路算出手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置。
【請求項10】
目的地の入力を受け付ける入力受付手段と、
前記目的地までの誘導経路を算出する誘導経路算出手段と、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段と、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段と、
前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段と、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段と、を備えた音声案内制御装置。
【請求項11】
目的地の入力を受け付ける入力受付手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、および、
前記第2特定手段が特定した前記距離および前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項12】
目的地の入力を受け付ける入力受付手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、および、
前記第2特定手段が特定した前記相対方位を、自らの移動状態の変化に基づいたタイミングで、繰り返し音声出力装置に出力させる報知制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項13】
目的地の入力を受け付ける入力受付手段、
前記目的地までの誘導経路を算出する誘導経路算出手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地までの距離、および、前記第1特定手段が特定した前記自己向きを基準とする、前記自位置から前記目的地への相対方位を特定する第2特定手段、
前記第2特定手段が特定した前記距離および前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラム。
【請求項14】
目的地の入力を受け付ける入力受付手段、
前記目的地までの誘導経路を算出する誘導経路算出手段、
自位置および自らの向き(以下、自己向きという)を特定する第1特定手段、
前記第1特定手段が特定した前記自己向きを基準とする、前記第1特定手段が特定した前記自位置から前記入力受付手段が受け付けた前記目的地への相対方位を特定する第2特定手段、
前記第2特定手段が特定した前記相対方位を、繰り返し音声出力装置に出力させる報知制御手段、および、
前記距離が経路案内基準距離以下となることに基づいて、前記誘導経路算出手段が算出した誘導経路に沿った経路案内を前記音声出力装置または画像表示装置に行わせる経路案内制御手段として、コンピュータを機能させる音声案内制御プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−250674(P2006−250674A)
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願番号】特願2005−66708(P2005−66708)
【出願日】平成17年3月10日(2005.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願日】平成17年3月10日(2005.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]