
目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラム
【課題】 過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置において、目的地の推定精度を向上させる。
【解決部】 目的地推定装置100は、過去に目的地とされた場所の履歴を記憶する学習データ記憶部9bと、学習データ記憶部9bに記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部83と、目的地推定部83にて目的地として推定される目的地候補から、学習データ記憶部9bに記憶された履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部84とを備えている。
【解決部】 目的地推定装置100は、過去に目的地とされた場所の履歴を記憶する学習データ記憶部9bと、学習データ記憶部9bに記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部83と、目的地推定部83にて目的地として推定される目的地候補から、学習データ記憶部9bに記憶された履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部84とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラムに関し、特に、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラムに関するものである。
【背景技術】
【0002】
従来より、ナビゲーションシステムは、目的地が設定されると、現在位置からその目的地までの経路を探索する機能を有している。また、探索した経路に交通渋滞や交通規制等の関連情報がある場合に、その情報を提示したり、関連情報を踏まえて経路を探索したりする機能を備えているナビゲーションシステムも知られている。
【0003】
ユーザは、ナビゲーションシステムに対して目的地を設定することができる。しかし、ナビゲーションシステムに対する目的地の設定操作の煩わしさから、目的地がユーザの行き慣れた場所であって経路案内が不要である場合は、ユーザはナビゲーションシステムに対して目的地の設定を行わず、ナビゲーションシステムによる経路探索及び経路案内が行なわれないこともある。
【0004】
このような場合には、ユーザは、ナビゲーションシステムによる上記の関連情報の提示や関連情報を踏まえた経路の探索等の機能を使用できないことになり、交通渋滞が生じていることを知らずに、その経路を通行してしまったり、交通規制の地点まで通行して初めて交通規制があることを知って迂回せざるを得なくなったりする。
【0005】
ユーザが目的地を設定しなくても時間帯、曜日、同乗者の有無等の状況情報や、ユーザの年齢、職業等のユーザ情報に基づいて、自動的に目的地を推定する目的地推定装置を備えたナビゲーションシステムが提案されている(例えば、特許文献1参照)。この目的地推定装置では、過去に目的地とされた場所を目的地候補として、上記の状況情報やユーザ情報に基づいて尤度が高いものが選択されて目的地として推定される。
【0006】
このような目的地推定装置によれば、ユーザが、慣れた路であって経路案内を必要としないと考えてナビゲーションシステムに目的地を設定しない場合であっても、自動的に目的地を推定して、そこへの経路を探索し、その探索された経路について関連情報がある場合には、その関連情報を提示し、又は関連情報を踏まえた経路を提示することが可能になる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−10572号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来の目的地推定装置では、上述のように、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定している。
【0009】
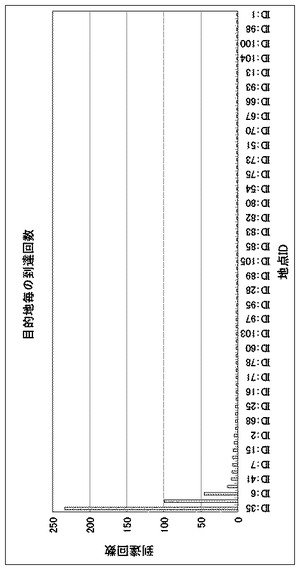
図8は、過去の目的地の履歴における、目的地ごとの到達回数の例を示すグラフである。図8に示すように、過去の目的地の履歴においては、実際には、例えば目的地の9割以上は1回しか行ったことのない場所であり、全体の目的地の1割程度でのべ到達回数の9割以上を占めるということもある。
【0010】
従って、例えば、かなり以前に一度行ったことがあるのみである等、現時点では二度と行かないだろうと考えられる場所も、状況情報やユーザ情報に基づいて目的地として推定されてしまうことがある。これによって、目的地の推定の精度が落ちてしまうという問題がある。
【0011】
本発明は、従来の問題を解決するためになされたもので、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置又はそれを備えたナビゲーションシステムにおいて、目的地の推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0012】
本発明の目的地推定装置は、過去に目的地とされた場所の履歴を記憶する履歴記憶部と、前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、観測変数を取得する観測変数取得部と、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部とを備え、前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、前記候補排除部は、前記目的地推定部にて確率が求められた前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、前記確信度が所定の閾値より低いと判断される目的地候補を排除する。
【0013】
この構成によれば、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、確定モデルに基づいて目的地である確率が高い順に目的地候補を並べたときに、目的地である確信度が低い目的地候補がある場合と比較して、目的地である確信度が高い目的地候補の順位が変わる(繰り上がる)ことになる。その結果、目的地の推定精度が向上する。また、確定モデルに基づいて目的地である確率(尤度)の高いとされる目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。即ち、目的地推定装置は、従来と同様にして、確率モデルを用いて目的地候補の確率を求めた上で、目的地候補の中から確信度が低いものを除いて、確率が高い目的地候補を目的地として推定する。なお、目的地推定部は複数の目的地候補を目的地として推定してもよい。この場合には、推定した目的地の中からユーザに目的地を選択してもらってもよいし、推定したすべての目的地について経路探索を行なって、探索された経路に関連する関連情報を提示するようにしてもよい。また、上記の確信度は履歴記憶部に記憶された履歴に基づいて得られる変数であり、例えば、日常的に行っている目的地候補、及び今後日常的にいく可能性がある目的地候補について高くなるような変数であってよい。
【0014】
また、本発明の別の態様の目的地推定装置は、過去に目的地とされた場所の履歴を記憶する履歴記憶部と、前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、観測変数を取得する観測変数取得部と、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、前記履歴における前記目的地とされた場所を前記目的地候補として、前記関係記憶部に記憶される前記関係を学習する学習部とをさらに備え、前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、前記候補排除部は、前記学習部にて学習に用いられる前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する。
【0015】
この構成によっても、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、確定モデルに基づいて目的地である確率が高い順に目的地候補を並べたときに、目的地である確信度が低い目的地候補を含めて学習をした場合と比較して、目的地である確信度が高い目的地候補の順位が変わる(繰り上がる)ことになる。その結果、目的地の推定精度が向上する。また、目的地推定部は、履歴に基づいて学習される確率モデルに基づいて目的地の推定を行なうが、この学習の際に、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【0016】
上記の目的地推定装置において、前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、日付の情報が含まれていてよく、前記候補排除部は、前記日付の情報に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除してよい。
【0017】
この構成によれば、履歴における日付の情報を用いて目的地である確信度が所定の閾値より低いと判断される目的地候補を好適に排除できる。履歴に日付の情報が含まれていることで、候補排除部は、例えば、履歴を日付順に並べ替えて直近の一定回数の行動の履歴のみを参照したり、履歴を日付順に並べ替えてある場所が最後に目的地とされた日以後の行動回数や現在までの期間を把握したりすることが可能となる。なお、履歴には、日付の情報に加えてさらに時刻の情報が含まれていてもよい。
【0018】
上記の目的地推定装置において、前記確信度は、(a)直近の一定回数の行動において当該目的地候補が目的地とされた割合、(b)当該目的地候補が最後に目的地とされた日以後の行動回数、(a’)直近の一定期間の行動において当該目的地候補が目的地とされた割合、(b’)当該目的地候補が最後に目的地とされた日までの期間、(a)及び(b)、(a’)及び(b)、(a)及び(b’)、又は(a’)及び(b’)に基づいて求められてよい。
【0019】
この構成によれば、確信度を、日常的に行っている目的地、及び今後日常的にいく可能性がある目的地について高くなるような変数とすることができ、日常的に行かない目的地候補を好適に排除することができる。
【0020】
上記の目的地推定装置において、前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた割合、又は当該目的地候補が目的地とされた回数に基づいて求められてよい。
【0021】
この構成によれば、例えば、全履歴において、目的地とされた割合が所定の閾値に満たない目的地候補や、目的地とされた回数が所定の閾値に満たない目的地候補は、候補排除部によって排除される。
【0022】
上記の目的地推定装置において、前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、重みが付与されていてよく、前記確信度は、前記重みを考慮して求められてよい。
【0023】
この構成によれば、ある場所が目的地とされた場合に、種々の条件に応じて重みを付けて履歴が記憶され、確信度は、その重みを考慮して求められるので、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0024】
上記の目的地推定装置において、前記重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否かに応じて、付与されてよい。
【0025】
ユーザが目的地として設定した場所はユーザが行き慣れていない場所である可能性が比較的高いと考えられ、一方、ユーザが目的地として設定することなく到達した場所であれば、その場所はユーザが行き慣れている場所である可能性が比較的高いと考えられるので、この構成によれば、そのような場所を目的地として推定される目的地候補から排除するので、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0026】
上記の目的地推定装置において、前記重みは、出発地から当該場所までの距離に応じて、付与されてよい。
【0027】
出発地から目的地とされた場所までの距離が長い場合には、より確実な目的をもってそこに行った可能性が比較的高いと考えられ、逆に出発地から目的地とされた場所までの距離が短い場合には、たまたまそこで停車した等の理由によりそこが目的地とされた場合が比較的高いと考えられるので、この構成によれば、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0028】
上記の目的地推定装置において、前記重みは、当該場所が、多くの人が集まる場所であるか否かに応じて、付与されてよい。
【0029】
例えば駐車場の収容台数が多い等、一般的に多くの人が集まる場所である場合には、そこが再び目的地とされる可能性は比較的高いと考えられるので、この構成によれば、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0030】
また、本発明の別の態様は、ナビゲーションシステムであり、このナビゲーションシステムは、上記の目的地推定装置と、前記目的地推定部にて推定された目的地までの経路を探索する経路探索部とを備えた構成を有している。
【0031】
この構成によっても、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。
【0032】
また、上記のナビゲーションシステムは、前記経路探索部にて探索された経路に関連する関連情報を提示する関連情報提示部をさらに備えていてよい。
【0033】
ユーザは、日常的に行く目的地については、経路を熟していることから、わざわざナビゲーションシステムに目的地を設定して経路探索を行なわないこともあるが、この構成によれば、ユーザが目的地を設定しなかった場合にも、その目的地までの経路に関連情報がある場合には、それを提示することができる。
【0034】
また、上記のナビゲーションシステムにおいて、前記経路探索部は、交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索してよい。
【0035】
この構成によれば、ユーザが目的地を設定しなかった場合にも、経路探索部が交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索するので、ユーザが日常的に通る経路に渋滞情報や交通規制情報等の関連情報がある場合には、そのような関連情報を踏まえて別の経路を探索することができる。
【0036】
本発明の別の態様は、目的地推定方法であり、この方法は、過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップとを含み、前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する。
【0037】
この構成によれば、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、確定モデルに基づいて目的地である確率(尤度)の高い目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。即ち、目的地推定方法は、従来と同様にして、確率モデルを用いて目的地候補の確率を求めた上で、目的地候補の中から確信度が低いものを除いて、確率が高い目的地候補を目的地として推定する。
【0038】
本発明の別の態様の目的地推定方法は、過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップとを含み、前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する。
【0039】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、学習ステップにおいて履歴に基づいて確率モデルの学習を行ない、目的地推定ステップでは、学習された確率モデルに基づいて目的地の推定を行なうが、この学習ステップにおいて、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【0040】
本発明のさらに別の態様は、目的地推定プログラムであり、この目的地推定プログラムは、コンピュータに、目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップとを実行させる。ここで、前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する。
【0041】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、確率モデルに基づいて目的地である確率(尤度)の高い目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。
【0042】
本発明の別の態様の目的地推定プログラムは、コンピュータに、目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップとを実行させる。ここで、前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する。
【0043】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、学習ステップにおいて履歴に基づいて確率モデルの学習を行ない、目的地推定ステップでは、学習された確率モデルに基づいて目的地の推定を行なうが、この学習ステップにおいて、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【発明の効果】
【0044】
本発明によれば、推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上するという優れた効果を有する。
【図面の簡単な説明】
【0045】
【図1】本発明の実施の形態におけるナビゲーションシステムの要部構成を示すブロック図
【図2】本発明の実施の形態におけるナビゲーションシステムの構成を示すブロック図
【図3】本発明の実施の形態におけるベイジアンネットワークモデルを示す図
【図4】本発明の実施の形態におけるユーザ情報を記憶する処理のフローチャート
【図5】本発明の実施の形態における目的地推定及び経路探索を行う処理のフローチャート
【図6】本発明の実施の形態における実際の行動に基づいて学習を行なう処理のフローチャート
【図7】本発明の実施の形態の変形例におけるナビゲーションシステムの要部構成を示すブロック図
【図8】過去の目的地の履歴における、目的地ごとの到達回数の例を示すグラフ
【発明を実施するための形態】
【0046】
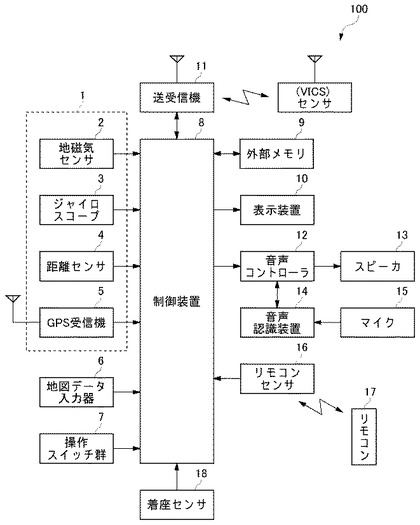
以下、本発明の実施の形態のナビゲーションシステムについて、図面を参照しながら説明する。図1は、本発明の実施の形態におけるナビゲーションシステムの要部構成を示すブロック図である。図2は、本発明の実施の形態におけるナビゲーションシステムの構成を示すブロック図である。まず、図2を参照して、本実施の形態におけるナビゲーションシステムの全体構成を説明する。
【0047】
ナビゲーションシステム100は、その一部構成によって目的地推定装置としても機能する。図1に示すように、ナビゲーションシステム100は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下、リモコンと称する)17、着座センサ18、及びこれら各装置が接続された制御装置8を備えている。
【0048】
位置検出器1は、車両の絶対方位を検出するための地磁気センサ2、車両の相対方位を検出するためのジャイロスコープ3、車両の通行距離を検出する距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機5を有している。これらのセンサ等2、3、4、5は、いずれも周知のものである。これらのセンサ等2、3、4、5は各々が性質の異なる誤差を持っているため、複数のセンサ等2、3、4、5により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部で位置検出器1を構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0049】
地図データ入力器6は、例えばDVD−ROM、CD−ROM、フラッシュメモリ、ハードディスクなどの図示しない記憶媒体を備えている。その記憶媒体には、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データが格納されている。地図データ入力器6は、それらのデータを制御装置8に入力する。
【0050】
操作スイッチ群7は、表示装置10と一体になったタッチパネルからなり、表示装置10に表示された地図の縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。操作スイッチ群7において、一部又は全部のスイッチが、表示装置10の周辺に設けられるメカニカルなスイッチであってもよい。
【0051】
リモコン17には、図示しない複数の操作スイッチが設けられ、その操作スイッチの操作により操作スイッチ群7と同様の入力操作が行える。リモコン17に入力された入力操作を表す信号は、リモコンセンサ16を介して制御装置8へ供給される。
【0052】
外部メモリ9は、例えば、メモリカードやハードディスク等であり、書き込み可能な記憶媒体を備えている。この外部メモリ9には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。
【0053】
表示装置10は、例えば液晶ディスプレイ、有機ELディスプレイによって構成され、その表示装置10の所定の地図表示領域には、車両の現在位置に対応する自車位置マークが地図データによって生成された車両周辺の道路地図上に重畳表示される。また、表示装置10には、その他に、現在時刻、渋滞情報などの他の情報表示を付加的に表示することもできる。
【0054】
送受信機11は、外部との通信接続をするための通信機であり、道路に敷設されたビーコンや各地のFM放送局を介して、VICS(Vehicle Information and Communication System)(登録商標)センタから提供される道路交通情報(交通渋滞情報、交通規制除法を含む)、気象情報、日付情報、曜日情報、施設情報、広告情報を受信するVICSセンサと接続され、この道路交通情報等を制御装置8へ送信する。また、上記制御装置8で処理した情報を送受信機11から出力することもできる。なお、送受信機11は、インターネットに接続して、インターネット経由で道路交通情報等を受信してもよい。
【0055】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づき所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に出力する。
【0056】
マイク15は、操作者が発声した音声を電気信号として音声認識装置14に入力する。音声認識装置14は、マイク15から入力された操作者の入力音声と、内部に記憶する認識辞書(不図示)中の語彙データ(比較対照パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0057】
音声コントローラ12は、音声認識装置14を制御するとともに、音声入力のあった操作者に対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0058】
着座センサ18は、座席毎に乗員がいるか否かを検出して、乗員の有無を表す乗員信号を制御装置8へ出力する。
【0059】
制御装置8は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0060】
制御装置8は、音声認識装置14からの情報に基づき、操作者の発声に対する所定の処理及び操作スイッチ群7あるいはリモコン17の入力操作に対する所定の処理(例えば、外部メモリ9への地図データの記憶処理、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0061】
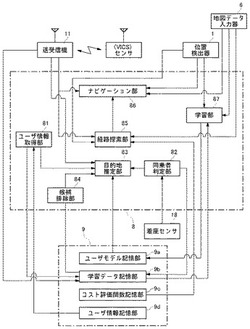
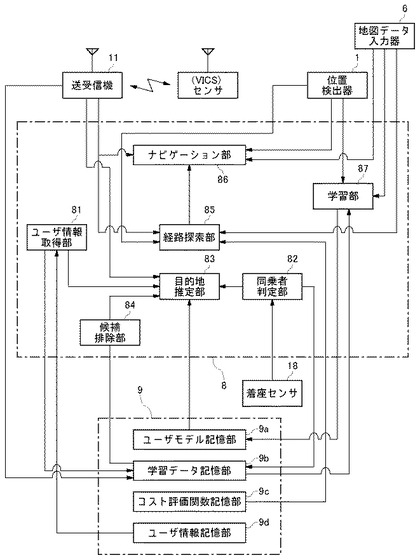
図1は、本発明の実施の形態におけるナビゲーションシステム100の要部構成を示すブロック図である。外部メモリ9は、ユーザモデル記憶部9a、学習データ記憶部9b、コスト評価関数記憶部9c、及びユーザ情報記憶部9dを備えている。ユーザモデル記憶部9aは、確率モデルであるベイジアンネットワークモデルを記憶する領域である。
【0062】
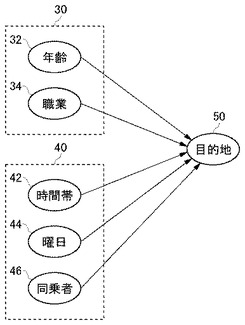
図3は、ユーザモデル記憶部9aに記憶されるベイジアンネットワークモデルを示す図である。ベイジアンネットワークモデル20は、ユーザ情報ノード30として、年齢ノード32と職業ノード34とを持ち、状況情報ノード40として、時間帯ノード42と曜日ノード44と同乗者ノード46とを持ち、これらのノードを親ノードとする子ノードとして目的地ノード50を持っている。
【0063】
年齢ノード32は、運転者の年齢に対応した自然数をとり、職業ノード34は、予め定められた多数種類の職業名(状態)をとる。時間帯ノード42は、24時間が複数の時間帯(例えば、4時間ずつ、2時間ずつ、1時間ずつ等)に区分されることにより複数の状態をとり、曜日ノード44は、月曜日から日曜日までの7状態をとり、同乗者ノード46は、同乗者有り及び同乗者無しの2つの状態をとる。なお、これらのノード32、34、42、44、46は観測変数である。
【0064】
目的地ノード50は、学習によって設定された複数の目的地候補(状態)をとる。各親ノードと子ノードとの間は矢印で連結されており、この矢印は、矢印の根元のノードと矢印の先のノードとの間の条件付依存性を表し、個々の矢印に対応する条件付確率が設定されている。
【0065】
このように構成されたベイジアンネットワークモデル20に、ユーザ情報(年齢及び職業)と、状況情報(時間帯、曜日、及び同乗者の有無)とを与えると、目的地ノード50の各目的地候補の確率(尤度)が得られる。
【0066】
図2に戻って、学習データ記憶部9bは、ベイジアンネットワークモデル20を学習する(修正する)ための学習データを記憶する領域である。この学習データは、目的地推定時に実際にベイジアンネットワークモデル20に入力された年齢、職業、時間帯、曜日、同乗者の有無と、実際に目的地とされた場所と、日付とを一組とするデータである。このように、学習データ記憶部9bは、目的地とされた場所の履歴を記憶するものであり、本発明の履歴記憶部に該当する。
【0067】
コスト評価関数記憶部9cは、車両の現在位置から目的地までの経路探索に使用する下式(1)に示すコスト評価関数Ciを記憶している領域である。
Ci=α・l(i)+β・t(i)+γ・w(i)+δ・n(i) ・・・(1)
式(1)において、l(i)は距離のコスト、t(i)は平均通行時間のコスト、w(i)は道幅のコスト、n(i)は右左折回数のコストである。また、係数α、β、γ、δは重み係数であり、予め設定されている。なお、式(1)に示すコスト評価関数Ciは、一例であり、コスト評価関数Ciに、距離、平均通行時間、道幅、右左折回数以外のパラメータ(例えば、制限速度や信号機の数など)が含まれていてもよい。
【0068】
ユーザ情報記憶部9dは、複数のユーザについて、ユーザ情報である年齢を決定するためのユーザの生年月日、及びユーザ情報である職業を、ユーザ名と関連付けて記憶している領域である。なお、年齢それ自体は一年に一度変化するが、年齢は、現在の日付が定まれば、不変情報である生年月日から定まるので、ユーザの不変的情報すなわちユーザ情報として用いることができる。このように、ユーザ情報には、ユーザにとって不変の情報だけでなく、その不変の情報に基づいて定めることができる情報が含まれてよく、従って、さらに、ユーザにとって1年程度不変の情報(例えば年収)も含まれてよい。
【0069】
制御装置8は、ユーザ情報取得部81と、同乗者判定部82と、目的地推定部83と、候補排除部84と、経路探索部85と、ナビゲーション部86と、学習部87とを備えている。
【0070】
ユーザ情報取得部81は、運転者が誰であるかを判定して、ユーザ情報記憶部9dから、その判定した運転者の生年月日及び職業を取得するとともに、その生年月日及び現在の日付からユーザの年齢を決定する。なお、運転者が誰であるかを判定する方法としては、ここでは、予め登録された複数のユーザのリストを表示装置10に表示し、その表示装置10に表示されたリストから、操作スイッチ群7又はリモコン17の操作により、運転者がどのユーザを選択したかによって判定する。ユーザ情報は、ベイジアンネットワークモデル20における観測変数であるので、ユーザ情報取得部81は、観測変数取得部に該当する。
【0071】
同乗者判定部82は、着座センサ18から供給される信号に基づいて、同乗者の有無を判定する。なお、同乗者の有無はベイジアンネットワークモデル20における観測変数であるので、この同乗者判定部82は観測変数取得部に該当する。目的地推定部83は、ユーザによって目的地が設定されていないときに目的地の推定を実行するが、ユーザによって目的地が設定されているときにも、その目的地までの中間的な目的地である立ち寄り地を推定するために、実行することもできる。
【0072】
目的地推定部83は、ユーザ情報取得部81において取得した年齢及び職業と、車両内部に設けられた図示しない時計からの信号に基づいて決定される時間帯と、送受信機11を介して得られる曜日情報と、同乗者判定部82によって判定された同乗者の有無とを、ベイジアンネットワーク20の年齢ノード32、職業ノード34、時間帯ノード42、曜日ノード44、同乗者ノード46にそれぞれ入力して、目的地ノード50の各目的地候補の尤度を求める。なお、送受信機11を介して得られる曜日情報は、ベイジアンネットワークモデル20における観測変数であるので、送受信機11は観測変数取得部に該当する。
【0073】
候補排除部84は、目的地推定部83にて目的地として推定される目的地候補から、確信度が所定の閾値より低いと判断される目的地候補を排除する。目的地推定部83は、候補排除部84によって一部の目的地候補が排除されて残った目的地候補のうちの、尤度の最も高い目的地候補を目的地として推定する。
【0074】
上記の確信度とは、当該目的地候補が日常的に行く場所であると確信できる度合いである。即ち、目的地推定部83は、日常的に行かない目的地候補を除いて、尤度の最も高い目的地候補を目的地として推定する。確信度が所定の閾値より高いか低いかは、学習データ記憶部9bに記憶された学習データ、即ち過去の履歴に基づいて求められる。確信度が高い目的地候補には、実際に日常的に行っている場所及び日常的に行く可能性がある場所が含まれる。
【0075】
候補排除部84は、単に、履歴に基づいて、当該目的地候補に過去に何回目的地とされたかという観点だけでなく、履歴に含まれる目的地とされた日時(単に日付のみでもよい)に基づいて、確信度、即ち当該目的地候補が日常的に行く場所であると確信できる度合いを求める。具体的には、本実施の形態では、具体的には、本実施の形態では、確信度は、(a)直近の一定回数の行動において目的地とされた割合、(b)最後に目的地とされた日以後の行動回数、(a’)直近の一定期間において目的地とされた割合、又は(b’)最後に目的地とされた日までの期間に基づいて求められてよい。
【0076】
確信度は、連続的な値であってもよいし、離散的な値であってもよい。例えば、(a)について、直近の一定回数の行動において目的地とされた割合をそのまま確信度としてもよいし、直近の一定回数の行動において目的地とされた割合が0%、0〜50%、50〜100%のそれぞれの場合について、確信度を0、1、2としてもよい。
【0077】
上記の(a)は、実際に日常的に行っている場所を判断するための条件である。例えば、毎年1回習慣的に行く場所は、数年にわたって通行履歴を学習していくことで、その場所に行った回数が増加し、全通行履歴におけるその場所に行った割合が増加していくことがあるが、このような場所を日常的に行く場所とするのは適切でない。
【0078】
そこで、(a)では、直近の一定回数の行動においてその目的地候補が目的地とされた割合に基づいて確信度を求めている。例えば、毎日1往復の通行(毎日2回の行動)を行なうことを想定して、直近の1ヶ月(行動回数は60回)において、2週間に1回以上の割合で行っている場所を、日常的に行っている場所(確信度:1)とし、2日に1回以上の割合で言っている場所を、日常的かつ頻繁に行っている場所とする場合(確信度:2)とする場合には、直近の60回の行動において目的地とされた割合が、0%以上4%未満の場合は確信度を0とし、4%以上25%未満の場合は確信度を1とし、25%以上の場合は確信度を2とすることができる。
【0079】
また、上記の(b)は、日常的に行く可能性がある場所を判断するための条件である。即ち、これまでに1回しか行ったことがない場所であっても、それがごく最近行った場所であれば、今現在、再び行く(即ち日常的に行くことになる)可能性が高いといえるが、逆に、例えば数年前には頻繁に通っていたが最近はまったく行っていないといった場所は、全通行履歴におけるその場所に行った割合が高い場合があるが、今現在では再び行く可能性は低い(即ち、日常的に行かなくなっている)といえる。
【0080】
そこで、(b)では、その目的地が最後に目的地とされた日から現在までの間の行動回数に基づいて確信度を求めている。例えば、上記のように毎日1往復の行動(毎日2回の行動)を行なうことを想定した場合に、最後に目的地とされた日から現在までの間の行動回数が、3回未満の場合は確信度を2とし、3回以上14回未満の場合は確信度を1とし、14回以上の場合は確信度を0とすることができる。
【0081】
上記の(a’)及び(b’)は、それぞれ(a)及び(b)における行動回数を期間で置き換えたものである。確信度は(a)又は(a’)及び(b)又は(b’)を適宜に組み合わせて求めてもよい。例えば、(a)と(b’)を組み合わせることで、直近の一定回数の行動において目的地とされた割合(a)が比較的小さい場合でも、最後に目的地とされた日までの期間(b’)が短ければ、ユーザは今現在再び行く可能性が高いとすることができ、また、直近の一定回数の行動において目的地とされた割合(a)が大きければ、最後に目的地とされた日までの期間(b’)が比較的長くても、目的地とされる可能性は低くないとするという柔軟な対応が可能になる。
【0082】
なお、上記の(a)における一定回数や(a’)における一定期間は、ユーザの行動頻度に応じて調整してもよい。即ち、ユーザの行動頻度が高い場合には、(a)における一定回数を大きくし、又は(a’)における一定期間を短く、ユーザの行動頻度が低い場合には、(a)における一定回数を小さくし、又は(a’)における一定期間を長くしてよい。
【0083】
候補排除部84は、目的地推定部83において目的地として推定され得る目的地候補のうちの、その確信が所定の閾値より小さい目的地候補を排除する。上述のように学習データ記憶部9bには、学習データとして、日付を含む履歴が記憶されているので、候補排除部84は、その学習データを参照することで、上記の(a)、(b)、(a’)、(b’)を取得することができる。目的地推定部83は、候補排除部84によって一部の目的地候補が排除された後に残った目的地候補の中で尤度の最も高い目的地候補を目的地として推定する。目的地推定部83は、推定した目的地を経路探索部85に出力する。
【0084】
経路探索部85は、地図データ入力器6から入力される地図データに基づいて、位置検出器1によって検出された車両の現在位置から目的地推定部83で推定した目的地までの経路を探索する。この経路探索には、コスト評価関数記憶部9cに記憶された式(1)に示すコスト評価関数Ciを用い、例えば、ダイクストラ法などの公知の手法によって、式(1)に示すコスト評価関数Ciの値が最小となるような経路を探索する。
【0085】
経路探索部85は、送受信機11から交通渋滞情報及び交通規制情報を含む道路交通情報を取得して、交通渋滞情報や交通規制情報がある場合には、それらを考慮して最適な経路を探索する。具体的には、交通渋や交通規制があればそれらを避けるように、最適な経路を探索する。そして、探索された経路に関する関連情報がある場合は、表示装置10によって表示し、又はスピーカ13によって音声で出力する。例えば、経路の途中にある施設のイベント情報等があれば、適宜のタイミングでこの情報をユーザに提供する。このとき、表示装置10やスピーカ13は、関連情報提示部に該当する。
【0086】
ナビゲーション部86は、経路探索部85によって探索された経路、位置検出器1によって逐次検出される車両の現在位置、及び、地図データ入力器6からの地図データに基づいて、経路案内を実行する。
【0087】
学習部86は、学習データ記憶部9bに記憶された学習データに基づいて、ベイジアンネットワークモデル20の学習を実行する。学習部86は、新たな学習データが追加されたときに学習を実行してもよいし、所定の学習周期で定期的に学習を実行してもよい。上述のように、学習データ記憶部9bに記憶される学習データは、年齢、職業、時間帯、曜日、同乗者の有無、実際に目的地とされた場所、及び日付が一組になったデータである。この学習データは、目的地が確定するごとに学習データ記憶部9bに追加される。なお、学習データ中の日付の情報は、ベイジアンネットワークモデル20の学習には用いられないが、上述のように、目的地候補の中から確信度が所定の閾値より低い目的地候補を排除する際に、候補排除部84によって用いられる。
【0088】
目的地の確定は以下のようにして行なう。まず、目的地を推定した場合において、通行の後に駐車を判定したときは、その駐車位置を目的地として確定する。また、ユーザによって目的地が設定された場合は、その設定された目的地をそのまま目的地として確定する。学習データとして記憶するための年齢及び職業は、ユーザ情報取得部81から得られ、同乗者の有無は同乗者判定部82から得られ、日付及び曜日は送受信機11から得られる。
【0089】
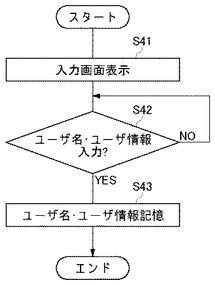
図4は、ユーザ情報を外部メモリ9のユーザ情報記憶部9dに記憶する処理のフローチャートである。まず、ユーザ名と、ユーザ情報及びユーザ情報を決定するための情報(すなわち生年月日及び職業)とを入力してもらうための所定の入力画面を表示装置10に表示する(ステップS41)。
【0090】
続いて、ユーザ操作によって、それらユーザ名、生年月日、職業が入力されたか否かを判断する(ステップS42)。そして、ユーザ名、生年月日、職業が入力された場合には(ステップS42にてYES)、入力されたユーザ名、ユーザ情報及びユーザ情報を決定するための情報を、外部メモリ9のユーザ情報記憶部9dに記憶する(ステップS43)。
【0091】
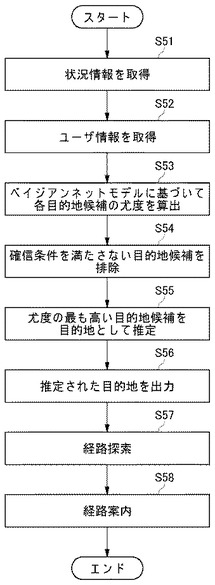
図5は、目的地推定及び経路探索を行う処理のフローチャートである。まず、同乗者判定部82及び送受信機11が状況情報を取得して、それを学習データ記憶部9bに記憶し、目的地推定部83に出力する(ステップS51)。このために、同乗者判定部82は、着座センサ18からの信号に基づいて同乗者の有無を決定する。また、送受信機11は、曜日情報を取得し、さらに、車両内部に設けられた時計から信号を取得して時間帯を決定する。なお、この際に送受信機11は日付情報も取得して、これを学習データ記憶部9bに記憶する。
【0092】
続いて、ユーザ情報取得部81が、ユーザ情報を取得して、それを学習データ記憶部9bに記憶し、目的地推定部83に出力する(ステップS52)。このために、ユーザ情報取得部81は、外部メモリ9のユーザ情報記憶部9dにユーザ情報が記憶されているユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから操作スイッチ群7又はリモコン17の操作によって選択されたユーザに関する生年月日及び職業を、ユーザ情報記憶部9dから読み出す。そして、読み出した生年月日と上記ステップS51で取得した時計からの信号に基づいて、運転者の年齢を決定する。
【0093】
続いて、目的地推定部83が、外部メモリ9のユーザモデル記憶部9aに記憶されたベイジアンネットワークモデル20に、上記ステップS51で取得した状況情報(時間帯、曜日、同乗者)及びステップS52で取得したユーザ情報(年齢、職業)を入力して、目的地ノード50の各目的地候補の尤度を算出する(ステップS53)。そして、候補排除部84は、確信度が所定の閾値より小さい目的地候補を排除する(ステップS54)。
【0094】
次に、目的地推定部83は、ステップS54にて確信度が所定の閾値より小さい目的地候補が排除された後に残った目的地候補の中から、最も尤度の高い目的地候補を目的地として推定する(ステップS55)。そして、推定された目的地を経路探索部85及び表示装置10に出力する(ステップS56)。
【0095】
続いて、経路探索部85が、位置検出器1によって検出された車両の現在位置からステップS55で推定した目的地まで、式(1)に示す評価関数Ciの総コストが最小となるような経路を、ダイクストラ法等によって探索する(ステップS57)。このとき、交通渋滞情報や交通規制情報等の関連情報があれば、それを考慮して経路を探索する。そして、ナビゲーション部86は、ステップS57で探索された経路、位置検出器1によって逐次検出される車両の現在位置、及び地図データ入力器6からの地図データに基づいて、経路案内を実行する(ステップS58)。
【0096】
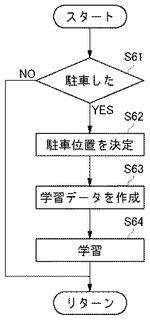
図6は、実際の行動に基づいて学習を行なう処理のフローチャートである。まず、駐車を判定したか否かを判断する(ステップS61)。駐車の判定は、ここでは、位置検出器1によって逐次検出される車両位置が所定時間同一場所であったことに基づいて行うこととするが、イグニッションキーのオン・オフに基づいて判定することも可能である。
【0097】
駐車が判定されていないときは(ステップS61にてNO)、本ルーチンを一旦終了するが、駐車が判定されたときは(ステップS61にてYES)、位置検出器1によって検出される現在の車両位置を駐車位置として決定し、その駐車位置を学習データ記憶部9bに記憶する(ステップS62)。
【0098】
次に、ベイジアンネットワークモデル20を学習するための学習データを作成する(ステップS63)。この学習データは、ベイジアンネットワークモデル20の各ノード32、34、42、44、46、50についての状態をそれぞれ1つずつ有する一組のデータであり、年齢ノード32と職業ノード34については、図5のステップS52で、時間帯ノード42、曜日ノード44、同乗者ノード46については、図5のステップS51で、それぞれ学習データ記憶部9bに記憶されている。また、目的地ノード50は、図6のステップS62で記憶した駐車位置である。
【0099】
そして、ステップS63で作成した学習データを用いて、ユーザモデル記憶部9aに記憶されているベイジアンネットワークモデル20の親ノードと子ノードとの間の依存性確率を修正する(学習する)(ステップS64)。この学習を繰り返すことにより、目的及び目的地の推定精度が次第に向上する。
【0100】
以上のように、本実施の形態のナビゲーションシステム100では、目的地推定部83が、入力されたユーザ情報及び状況情報をベイジアンネットワークモデル20に入力することにより、各目的地候補の尤度を求めるが、このとき、確信度が所定の閾値より小さい目的地候補を除外して、尤度の最も高い目的地候補を目的地として推定するので、ベイジアンネットワークモデル20を用いたベイズ推論の不完全性を補完して、日常的に行く場所ではない目的地候補を目的地として推定してしまうことを回避できる。
【0101】
なお、上記の実施の形態では、学習部87は、すべての過去の通行履歴を学習データとして用いて学習を行ない、ベイジアンネットワークモデル20を修正し、そのように修正されたベイジアンネットワークモデル20にユーザ情報及び状況情報を与えることで、各目的地候補の尤度を求めた。そして、この目的地候補には、確信度が所定の閾値よりも小さいものも含まれているため、それらを除いて、最も尤度の高いものを目的地として推定した。本発明はこのような実施形態に限られない。
【0102】
変形例のナビゲーションシステムにおいて、学習部87は、学習データ記憶部9bに記憶されているデータ(年齢、職業、時間帯、曜日、同乗者の有無、実際に目的地とされた場所、日付が一組になっている)に対して、確信度を所定の閾値と比較して、閾値より高いもののみを学習データとして採用して、ベイジアンネットワークモデル20を修正して(学習して)もよい。この場合には、目的地推定部83は、ベイジアンネットワークモデル20にユーザ情報及び状況情報を与えて得られた各目的地候補のうちの尤度が最も高いものをそのまま推定結果とする。
【0103】
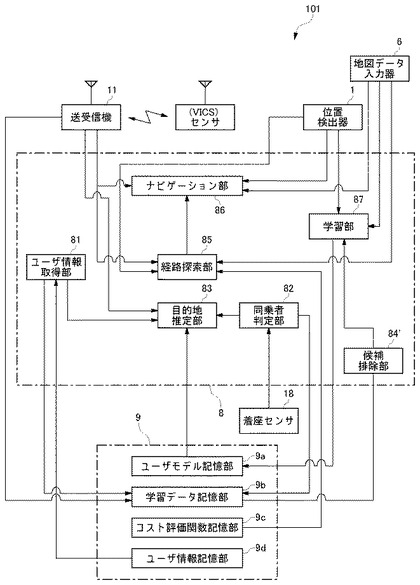
図7は、変形例のナビゲーションシステムの要部構成を示すブロック図である。変形例のナビゲーションシステム101では、候補排除部84’が、学習データ記憶部9bと学習部87との間に設けられている。候補排除部84’は、上述のいずれかの確定条件を採用して、学習データ記憶部9bに過去の履歴として記憶された学習データのうち、確定条件を満たさない学習データを排除して学習部9bに出力する。
【0104】
また、上記の実施の形態では、尤度が最も高い目的地候補を目的地として推定して(ステップS55)、自動的にその目的地への経路探索(ステップS57)及び経路案内(ステップS58)を行なったが、尤度が高い順に複数の目的地候補を表示装置10に表示して、ユーザに目的地を選択させてもよい。ユーザが目的地を選択すると、ユーザが自ら目的地を設定したのと同様に、その時点で目的地が確定する。
【0105】
また、上記の実施の形態では、目的地を推定した後に、自動で経路案内を行なったが(ステップS58)、ユーザが積極的に目的地を設定しないのは、その目的地までの経路を熟知しているからであると考えられるため、経路案内はしないようにして、経路探索(ステップS57)で探索された経路に関連する関連情報がある場合にのみ、それを提示するようにしてもよい。あるいは、経路探索(ステップS57)を行なった結果、その経路に関連する関連情報に基づいて、迂回ルートを提案する場合にのみ、迂回ルートを探索した上で経路案内をするようにしてもよい。これにより、熟知している経路について、自動で案内が開始されることによる煩わしさを回避できるとともに、有用な情報があればその情報を得ることができる。
【0106】
また、上記の実施の形態では、ユーザ情報取得部81は、予め登録された複数のユーザのリストを表示装置10に表示して運転者にそのリストから選択してもらうことで、運転者が誰であるかを判定したが、座席が電動であって、その座席位置を記憶するメモリ機能があり、ユーザごとに座席位置が記憶されている場合は、そのメモリ機能の利用と連動して運転者が誰であるかを判定してもよい。
【0107】
また、上記の実施の形態では、各目的地候補の確率を求めるのに、ベイジアンネットワークモデル20を用いたが、ニューラルネットワークモデル等の他の確率モデルを用いてもよい。また、ベイジアンネットワークモデル20の観測変数を適宜変更できることはいうまでもない。また、上記の実施の形態では、観測変数として、ユーザ情報と状況情報を用いた確率モデルを説明したが、観測変数は、状況情報のみ、又はユーザ情報のみであってよい。
【0108】
また、上記の実施の形態では、複数の確信度を例示したが、確信度は上記に例示したものに限られない。確信度は、過去の履歴に基づいて、日常的に行く場所ではないと判断されるものを排除できるものであればよい。例えば、確信度は、過去の履歴において、当該目的地候補が目的地とされた割合に基づいて求められてよく、当該目的地候補が目的地とされた回数に基づいて求められてもよい。例えば、過去の履歴において、目的地とされた割合が10%に満たない目的地候補を排除するようにしてよく、また、過去の履歴において、目的地とされた回数が3回未満(1回又は2回)である目的地候補を排除することとしてもよい。
【0109】
また、上記の実施の形態では、学習データは、目的地が確定するごとに学習データ記憶部9bに履歴として追加されるが、このとき、種々の条件に従って重みをつけて履歴を記憶してもよい。
【0110】
過去に目的地とされた場所の履歴は、履歴のレコードごとに重みのデータを有する。即ち、上記の実施の形態では、履歴のすべてのレコードが同じ重みを持っていたが、この変形例では、種々の状況に応じて、例えば、1.5回目的地とされた、0.5回目的地とされた、・・・というように、異なる重みを持つ。重みは、例えば、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否か、出発地から当該場所までの距離、及び当該場所がランドマークであるか否かに応じて付与される。以下、具体例を説明する。
【0111】
ある場所が目的地とされたときに、それがユーザによって目的地として設定されたことにより目的地として確定したものである場合は、重みを小さくとし、ユーザ自身が目的地を設定することなくその場所に着いたことでその場所が目的地として確定した場合には、重みを大きくとしてよい。例えば、ユーザがナビゲーションシステムにおいて目的地として設定することで目的地とされた場所については、その場所に1回行ったものとしてカウントし、ユーザがナビゲーションシステムにその場所を目的地として設定することなく(当該場所が目的地として推定された場合を含む)、当該場所に着いた場合には、その場所に2回行ったものとしてカウントする。これは、ユーザが目的地として設定した場所はユーザが行き慣れていない場所である可能性が比較的高いと考えられ、一方、ユーザが目的地として設定することなく到達した場所であれば、その場所はユーザが行き慣れている場所である可能性が比較的高いと考えられるからである。
【0112】
また、ある場所が目的地とされた場合に、出発地から当該場所までの距離に応じた重みを付与してもよい。例えば、出発地から目的地とされた場所までの距離が1km未満であれば、重みを0.5とし、1km以上10km未満であれば、重みを1とし、10km以上であれば、重みを1.5とする。なお、距離は直線距離であってもよいし、経路に沿った走行距離であってもよい。このように、出発地から目的地とされた場所までの距離が長いほど大きな重みを付与するのは、出発地から目的地とされた場所までの距離が長い場合には、より確実な目的をもってそこに行った可能性が比較的高いと考えられ、逆に出発地から目的地とされた場所までの距離が短い場合には、たまたまそこで停車した等の理由によりそこが目的地とされた場合が比較的高いと考えられるからである。
【0113】
また、ある場所が目的地とされた場合に、その場所が多くの人が集まる場所(例えば、有名な商業施設(百貨店等)、娯楽施設(遊園地、公園等)、観光地等)であるか否かに応じた重みを付与してもよい。多くの人が集まる場所であるか否かは、例えば、駐車場の収容台数に応じて決定してよく、ユーザの主観で決定してもよい。また、複数のユーザにおいて目的地とされた場所の履歴を集計して、実際にどのくらいの人がその場所を目的地としているかを調べて、その場所が多くの人が集まる場所であるかを決定してもよい。そして、例えば、目的地とされた場所が、多くの人が多く集まる場所である場合には、重みを3とし、多くの人が集まる場所でない場合には重みを1とする。このように、一般的に多くの人が集まる場所に大きな重みを付与するのは、多くの人が集まる場所であれば、そこが目的地とされる可能性は比較的高いと考えられるからである。
【0114】
候補排除部84は、上記の実施の形態と同様にして目的地である確信度を求めるが、このとき、例えば、当該場所が目的地とされた割合を求める際には、重みに基づいて割合を求める。例えば、10回の行動において、ある場所の履歴として、重み2の履歴と重み1の履歴があるとすると、その10回の行動において当該場所が目的地とされた割合は、(2+1)/10=30%となる。
【0115】
なお、候補排除部84は、この変形例のように履歴に重みが付与されている場合に、上記の実施の形態のように日時を考慮して確信度を求めるのではなく、日時を考慮せずに確信度を求めてよい。即ち、この変形例によれば、履歴における日時を考慮しなくても、目的地とされる確信度を求めて、その確信度が低い目的地候補を排除することができる。
【0116】
なお、重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否か、出発地から当該場所までの距離、及び当該場所が、多くの人が集まる場所であるか否かのうちの一部のみに基づいて付与されてもよく、また、他の要因に応じて付与されてもよい。
【0117】
また、ナビゲーションシステム100は、車両に搭載されるものであってもよいし、持ち歩ける形式のものであってもよい。
【産業上の利用可能性】
【0118】
本発明は、目的地の推定精度が向上するという効果を有し、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置等として有用である。
【符号の説明】
【0119】
1 位置検出器
2 地磁気センサ
3 ジャイロスコープ
4 距離センサ
5 GPS受信機
6 地図データ入力器
7 操作スイッチ群
8 制御装置
81 ユーザ情報取得部
82 同乗者判定部
83 目的地推定部
84 候補排除部
84’ 候補排除部
85 経路探索部
86 ナビゲーション部
87 学習部
9 外部メモリ
9a ユーザモデル記憶部
9b 学習データ記憶
9c コスト評価関数記憶部
9d ユーザ情報記憶部
10 表示装置
11 送受信機
12 音声コントローラ
13 スピーカ
14 音声認識装置
15 マイク
16 リモコンセンサ
17 リモコン
18 着座センサ
【技術分野】
【0001】
本発明は、目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラムに関し、特に、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラムに関するものである。
【背景技術】
【0002】
従来より、ナビゲーションシステムは、目的地が設定されると、現在位置からその目的地までの経路を探索する機能を有している。また、探索した経路に交通渋滞や交通規制等の関連情報がある場合に、その情報を提示したり、関連情報を踏まえて経路を探索したりする機能を備えているナビゲーションシステムも知られている。
【0003】
ユーザは、ナビゲーションシステムに対して目的地を設定することができる。しかし、ナビゲーションシステムに対する目的地の設定操作の煩わしさから、目的地がユーザの行き慣れた場所であって経路案内が不要である場合は、ユーザはナビゲーションシステムに対して目的地の設定を行わず、ナビゲーションシステムによる経路探索及び経路案内が行なわれないこともある。
【0004】
このような場合には、ユーザは、ナビゲーションシステムによる上記の関連情報の提示や関連情報を踏まえた経路の探索等の機能を使用できないことになり、交通渋滞が生じていることを知らずに、その経路を通行してしまったり、交通規制の地点まで通行して初めて交通規制があることを知って迂回せざるを得なくなったりする。
【0005】
ユーザが目的地を設定しなくても時間帯、曜日、同乗者の有無等の状況情報や、ユーザの年齢、職業等のユーザ情報に基づいて、自動的に目的地を推定する目的地推定装置を備えたナビゲーションシステムが提案されている(例えば、特許文献1参照)。この目的地推定装置では、過去に目的地とされた場所を目的地候補として、上記の状況情報やユーザ情報に基づいて尤度が高いものが選択されて目的地として推定される。
【0006】
このような目的地推定装置によれば、ユーザが、慣れた路であって経路案内を必要としないと考えてナビゲーションシステムに目的地を設定しない場合であっても、自動的に目的地を推定して、そこへの経路を探索し、その探索された経路について関連情報がある場合には、その関連情報を提示し、又は関連情報を踏まえた経路を提示することが可能になる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−10572号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来の目的地推定装置では、上述のように、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定している。
【0009】
図8は、過去の目的地の履歴における、目的地ごとの到達回数の例を示すグラフである。図8に示すように、過去の目的地の履歴においては、実際には、例えば目的地の9割以上は1回しか行ったことのない場所であり、全体の目的地の1割程度でのべ到達回数の9割以上を占めるということもある。
【0010】
従って、例えば、かなり以前に一度行ったことがあるのみである等、現時点では二度と行かないだろうと考えられる場所も、状況情報やユーザ情報に基づいて目的地として推定されてしまうことがある。これによって、目的地の推定の精度が落ちてしまうという問題がある。
【0011】
本発明は、従来の問題を解決するためになされたもので、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置又はそれを備えたナビゲーションシステムにおいて、目的地の推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0012】
本発明の目的地推定装置は、過去に目的地とされた場所の履歴を記憶する履歴記憶部と、前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、観測変数を取得する観測変数取得部と、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部とを備え、前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、前記候補排除部は、前記目的地推定部にて確率が求められた前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、前記確信度が所定の閾値より低いと判断される目的地候補を排除する。
【0013】
この構成によれば、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、確定モデルに基づいて目的地である確率が高い順に目的地候補を並べたときに、目的地である確信度が低い目的地候補がある場合と比較して、目的地である確信度が高い目的地候補の順位が変わる(繰り上がる)ことになる。その結果、目的地の推定精度が向上する。また、確定モデルに基づいて目的地である確率(尤度)の高いとされる目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。即ち、目的地推定装置は、従来と同様にして、確率モデルを用いて目的地候補の確率を求めた上で、目的地候補の中から確信度が低いものを除いて、確率が高い目的地候補を目的地として推定する。なお、目的地推定部は複数の目的地候補を目的地として推定してもよい。この場合には、推定した目的地の中からユーザに目的地を選択してもらってもよいし、推定したすべての目的地について経路探索を行なって、探索された経路に関連する関連情報を提示するようにしてもよい。また、上記の確信度は履歴記憶部に記憶された履歴に基づいて得られる変数であり、例えば、日常的に行っている目的地候補、及び今後日常的にいく可能性がある目的地候補について高くなるような変数であってよい。
【0014】
また、本発明の別の態様の目的地推定装置は、過去に目的地とされた場所の履歴を記憶する履歴記憶部と、前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、観測変数を取得する観測変数取得部と、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、前記履歴における前記目的地とされた場所を前記目的地候補として、前記関係記憶部に記憶される前記関係を学習する学習部とをさらに備え、前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、前記候補排除部は、前記学習部にて学習に用いられる前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する。
【0015】
この構成によっても、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、確定モデルに基づいて目的地である確率が高い順に目的地候補を並べたときに、目的地である確信度が低い目的地候補を含めて学習をした場合と比較して、目的地である確信度が高い目的地候補の順位が変わる(繰り上がる)ことになる。その結果、目的地の推定精度が向上する。また、目的地推定部は、履歴に基づいて学習される確率モデルに基づいて目的地の推定を行なうが、この学習の際に、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【0016】
上記の目的地推定装置において、前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、日付の情報が含まれていてよく、前記候補排除部は、前記日付の情報に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除してよい。
【0017】
この構成によれば、履歴における日付の情報を用いて目的地である確信度が所定の閾値より低いと判断される目的地候補を好適に排除できる。履歴に日付の情報が含まれていることで、候補排除部は、例えば、履歴を日付順に並べ替えて直近の一定回数の行動の履歴のみを参照したり、履歴を日付順に並べ替えてある場所が最後に目的地とされた日以後の行動回数や現在までの期間を把握したりすることが可能となる。なお、履歴には、日付の情報に加えてさらに時刻の情報が含まれていてもよい。
【0018】
上記の目的地推定装置において、前記確信度は、(a)直近の一定回数の行動において当該目的地候補が目的地とされた割合、(b)当該目的地候補が最後に目的地とされた日以後の行動回数、(a’)直近の一定期間の行動において当該目的地候補が目的地とされた割合、(b’)当該目的地候補が最後に目的地とされた日までの期間、(a)及び(b)、(a’)及び(b)、(a)及び(b’)、又は(a’)及び(b’)に基づいて求められてよい。
【0019】
この構成によれば、確信度を、日常的に行っている目的地、及び今後日常的にいく可能性がある目的地について高くなるような変数とすることができ、日常的に行かない目的地候補を好適に排除することができる。
【0020】
上記の目的地推定装置において、前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた割合、又は当該目的地候補が目的地とされた回数に基づいて求められてよい。
【0021】
この構成によれば、例えば、全履歴において、目的地とされた割合が所定の閾値に満たない目的地候補や、目的地とされた回数が所定の閾値に満たない目的地候補は、候補排除部によって排除される。
【0022】
上記の目的地推定装置において、前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、重みが付与されていてよく、前記確信度は、前記重みを考慮して求められてよい。
【0023】
この構成によれば、ある場所が目的地とされた場合に、種々の条件に応じて重みを付けて履歴が記憶され、確信度は、その重みを考慮して求められるので、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0024】
上記の目的地推定装置において、前記重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否かに応じて、付与されてよい。
【0025】
ユーザが目的地として設定した場所はユーザが行き慣れていない場所である可能性が比較的高いと考えられ、一方、ユーザが目的地として設定することなく到達した場所であれば、その場所はユーザが行き慣れている場所である可能性が比較的高いと考えられるので、この構成によれば、そのような場所を目的地として推定される目的地候補から排除するので、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0026】
上記の目的地推定装置において、前記重みは、出発地から当該場所までの距離に応じて、付与されてよい。
【0027】
出発地から目的地とされた場所までの距離が長い場合には、より確実な目的をもってそこに行った可能性が比較的高いと考えられ、逆に出発地から目的地とされた場所までの距離が短い場合には、たまたまそこで停車した等の理由によりそこが目的地とされた場合が比較的高いと考えられるので、この構成によれば、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0028】
上記の目的地推定装置において、前記重みは、当該場所が、多くの人が集まる場所であるか否かに応じて、付与されてよい。
【0029】
例えば駐車場の収容台数が多い等、一般的に多くの人が集まる場所である場合には、そこが再び目的地とされる可能性は比較的高いと考えられるので、この構成によれば、ユーザが目的地とする可能性の低い目的地候補をより正確に排除することができる。
【0030】
また、本発明の別の態様は、ナビゲーションシステムであり、このナビゲーションシステムは、上記の目的地推定装置と、前記目的地推定部にて推定された目的地までの経路を探索する経路探索部とを備えた構成を有している。
【0031】
この構成によっても、目的地推定部にて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。
【0032】
また、上記のナビゲーションシステムは、前記経路探索部にて探索された経路に関連する関連情報を提示する関連情報提示部をさらに備えていてよい。
【0033】
ユーザは、日常的に行く目的地については、経路を熟していることから、わざわざナビゲーションシステムに目的地を設定して経路探索を行なわないこともあるが、この構成によれば、ユーザが目的地を設定しなかった場合にも、その目的地までの経路に関連情報がある場合には、それを提示することができる。
【0034】
また、上記のナビゲーションシステムにおいて、前記経路探索部は、交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索してよい。
【0035】
この構成によれば、ユーザが目的地を設定しなかった場合にも、経路探索部が交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索するので、ユーザが日常的に通る経路に渋滞情報や交通規制情報等の関連情報がある場合には、そのような関連情報を踏まえて別の経路を探索することができる。
【0036】
本発明の別の態様は、目的地推定方法であり、この方法は、過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップとを含み、前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する。
【0037】
この構成によれば、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、確定モデルに基づいて目的地である確率(尤度)の高い目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。即ち、目的地推定方法は、従来と同様にして、確率モデルを用いて目的地候補の確率を求めた上で、目的地候補の中から確信度が低いものを除いて、確率が高い目的地候補を目的地として推定する。
【0038】
本発明の別の態様の目的地推定方法は、過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップとを含み、前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する。
【0039】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、学習ステップにおいて履歴に基づいて確率モデルの学習を行ない、目的地推定ステップでは、学習された確率モデルに基づいて目的地の推定を行なうが、この学習ステップにおいて、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【0040】
本発明のさらに別の態様は、目的地推定プログラムであり、この目的地推定プログラムは、コンピュータに、目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップとを実行させる。ここで、前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する。
【0041】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、確率モデルに基づいて目的地である確率(尤度)の高い目的地候補であっても、目的地である確信度が低い目的地候補は排除されて、残った目的地候補のうちの確率の高い目的地候補が目的地として推定される。
【0042】
本発明の別の態様の目的地推定プログラムは、コンピュータに、目的地とされた場所の履歴を記憶する履歴記憶ステップと、前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、観測変数を取得する観測変数取得ステップと、前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップとを実行させる。ここで、前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する。
【0043】
この構成によっても、目的地推定ステップにて推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上する。また、この構成によれば、学習ステップにおいて履歴に基づいて確率モデルの学習を行ない、目的地推定ステップでは、学習された確率モデルに基づいて目的地の推定を行なうが、この学習ステップにおいて、確信度が低い目的地候補は排除される。よって、このようにして学習された確率モデルに基づいて従来と同様に目的地を推定すれば、推定される目的地には、確信度が低い目的地候補は含まれなくなる。
【発明の効果】
【0044】
本発明によれば、推定される目的地には、目的地である確信度が所定の閾値より低いと判断されるものは含まれなくなるので、目的地の推定精度が向上するという優れた効果を有する。
【図面の簡単な説明】
【0045】
【図1】本発明の実施の形態におけるナビゲーションシステムの要部構成を示すブロック図
【図2】本発明の実施の形態におけるナビゲーションシステムの構成を示すブロック図
【図3】本発明の実施の形態におけるベイジアンネットワークモデルを示す図
【図4】本発明の実施の形態におけるユーザ情報を記憶する処理のフローチャート
【図5】本発明の実施の形態における目的地推定及び経路探索を行う処理のフローチャート
【図6】本発明の実施の形態における実際の行動に基づいて学習を行なう処理のフローチャート
【図7】本発明の実施の形態の変形例におけるナビゲーションシステムの要部構成を示すブロック図
【図8】過去の目的地の履歴における、目的地ごとの到達回数の例を示すグラフ
【発明を実施するための形態】
【0046】
以下、本発明の実施の形態のナビゲーションシステムについて、図面を参照しながら説明する。図1は、本発明の実施の形態におけるナビゲーションシステムの要部構成を示すブロック図である。図2は、本発明の実施の形態におけるナビゲーションシステムの構成を示すブロック図である。まず、図2を参照して、本実施の形態におけるナビゲーションシステムの全体構成を説明する。
【0047】
ナビゲーションシステム100は、その一部構成によって目的地推定装置としても機能する。図1に示すように、ナビゲーションシステム100は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下、リモコンと称する)17、着座センサ18、及びこれら各装置が接続された制御装置8を備えている。
【0048】
位置検出器1は、車両の絶対方位を検出するための地磁気センサ2、車両の相対方位を検出するためのジャイロスコープ3、車両の通行距離を検出する距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機5を有している。これらのセンサ等2、3、4、5は、いずれも周知のものである。これらのセンサ等2、3、4、5は各々が性質の異なる誤差を持っているため、複数のセンサ等2、3、4、5により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部で位置検出器1を構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0049】
地図データ入力器6は、例えばDVD−ROM、CD−ROM、フラッシュメモリ、ハードディスクなどの図示しない記憶媒体を備えている。その記憶媒体には、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データが格納されている。地図データ入力器6は、それらのデータを制御装置8に入力する。
【0050】
操作スイッチ群7は、表示装置10と一体になったタッチパネルからなり、表示装置10に表示された地図の縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。操作スイッチ群7において、一部又は全部のスイッチが、表示装置10の周辺に設けられるメカニカルなスイッチであってもよい。
【0051】
リモコン17には、図示しない複数の操作スイッチが設けられ、その操作スイッチの操作により操作スイッチ群7と同様の入力操作が行える。リモコン17に入力された入力操作を表す信号は、リモコンセンサ16を介して制御装置8へ供給される。
【0052】
外部メモリ9は、例えば、メモリカードやハードディスク等であり、書き込み可能な記憶媒体を備えている。この外部メモリ9には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。
【0053】
表示装置10は、例えば液晶ディスプレイ、有機ELディスプレイによって構成され、その表示装置10の所定の地図表示領域には、車両の現在位置に対応する自車位置マークが地図データによって生成された車両周辺の道路地図上に重畳表示される。また、表示装置10には、その他に、現在時刻、渋滞情報などの他の情報表示を付加的に表示することもできる。
【0054】
送受信機11は、外部との通信接続をするための通信機であり、道路に敷設されたビーコンや各地のFM放送局を介して、VICS(Vehicle Information and Communication System)(登録商標)センタから提供される道路交通情報(交通渋滞情報、交通規制除法を含む)、気象情報、日付情報、曜日情報、施設情報、広告情報を受信するVICSセンサと接続され、この道路交通情報等を制御装置8へ送信する。また、上記制御装置8で処理した情報を送受信機11から出力することもできる。なお、送受信機11は、インターネットに接続して、インターネット経由で道路交通情報等を受信してもよい。
【0055】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づき所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に出力する。
【0056】
マイク15は、操作者が発声した音声を電気信号として音声認識装置14に入力する。音声認識装置14は、マイク15から入力された操作者の入力音声と、内部に記憶する認識辞書(不図示)中の語彙データ(比較対照パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0057】
音声コントローラ12は、音声認識装置14を制御するとともに、音声入力のあった操作者に対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0058】
着座センサ18は、座席毎に乗員がいるか否かを検出して、乗員の有無を表す乗員信号を制御装置8へ出力する。
【0059】
制御装置8は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0060】
制御装置8は、音声認識装置14からの情報に基づき、操作者の発声に対する所定の処理及び操作スイッチ群7あるいはリモコン17の入力操作に対する所定の処理(例えば、外部メモリ9への地図データの記憶処理、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0061】
図1は、本発明の実施の形態におけるナビゲーションシステム100の要部構成を示すブロック図である。外部メモリ9は、ユーザモデル記憶部9a、学習データ記憶部9b、コスト評価関数記憶部9c、及びユーザ情報記憶部9dを備えている。ユーザモデル記憶部9aは、確率モデルであるベイジアンネットワークモデルを記憶する領域である。
【0062】
図3は、ユーザモデル記憶部9aに記憶されるベイジアンネットワークモデルを示す図である。ベイジアンネットワークモデル20は、ユーザ情報ノード30として、年齢ノード32と職業ノード34とを持ち、状況情報ノード40として、時間帯ノード42と曜日ノード44と同乗者ノード46とを持ち、これらのノードを親ノードとする子ノードとして目的地ノード50を持っている。
【0063】
年齢ノード32は、運転者の年齢に対応した自然数をとり、職業ノード34は、予め定められた多数種類の職業名(状態)をとる。時間帯ノード42は、24時間が複数の時間帯(例えば、4時間ずつ、2時間ずつ、1時間ずつ等)に区分されることにより複数の状態をとり、曜日ノード44は、月曜日から日曜日までの7状態をとり、同乗者ノード46は、同乗者有り及び同乗者無しの2つの状態をとる。なお、これらのノード32、34、42、44、46は観測変数である。
【0064】
目的地ノード50は、学習によって設定された複数の目的地候補(状態)をとる。各親ノードと子ノードとの間は矢印で連結されており、この矢印は、矢印の根元のノードと矢印の先のノードとの間の条件付依存性を表し、個々の矢印に対応する条件付確率が設定されている。
【0065】
このように構成されたベイジアンネットワークモデル20に、ユーザ情報(年齢及び職業)と、状況情報(時間帯、曜日、及び同乗者の有無)とを与えると、目的地ノード50の各目的地候補の確率(尤度)が得られる。
【0066】
図2に戻って、学習データ記憶部9bは、ベイジアンネットワークモデル20を学習する(修正する)ための学習データを記憶する領域である。この学習データは、目的地推定時に実際にベイジアンネットワークモデル20に入力された年齢、職業、時間帯、曜日、同乗者の有無と、実際に目的地とされた場所と、日付とを一組とするデータである。このように、学習データ記憶部9bは、目的地とされた場所の履歴を記憶するものであり、本発明の履歴記憶部に該当する。
【0067】
コスト評価関数記憶部9cは、車両の現在位置から目的地までの経路探索に使用する下式(1)に示すコスト評価関数Ciを記憶している領域である。
Ci=α・l(i)+β・t(i)+γ・w(i)+δ・n(i) ・・・(1)
式(1)において、l(i)は距離のコスト、t(i)は平均通行時間のコスト、w(i)は道幅のコスト、n(i)は右左折回数のコストである。また、係数α、β、γ、δは重み係数であり、予め設定されている。なお、式(1)に示すコスト評価関数Ciは、一例であり、コスト評価関数Ciに、距離、平均通行時間、道幅、右左折回数以外のパラメータ(例えば、制限速度や信号機の数など)が含まれていてもよい。
【0068】
ユーザ情報記憶部9dは、複数のユーザについて、ユーザ情報である年齢を決定するためのユーザの生年月日、及びユーザ情報である職業を、ユーザ名と関連付けて記憶している領域である。なお、年齢それ自体は一年に一度変化するが、年齢は、現在の日付が定まれば、不変情報である生年月日から定まるので、ユーザの不変的情報すなわちユーザ情報として用いることができる。このように、ユーザ情報には、ユーザにとって不変の情報だけでなく、その不変の情報に基づいて定めることができる情報が含まれてよく、従って、さらに、ユーザにとって1年程度不変の情報(例えば年収)も含まれてよい。
【0069】
制御装置8は、ユーザ情報取得部81と、同乗者判定部82と、目的地推定部83と、候補排除部84と、経路探索部85と、ナビゲーション部86と、学習部87とを備えている。
【0070】
ユーザ情報取得部81は、運転者が誰であるかを判定して、ユーザ情報記憶部9dから、その判定した運転者の生年月日及び職業を取得するとともに、その生年月日及び現在の日付からユーザの年齢を決定する。なお、運転者が誰であるかを判定する方法としては、ここでは、予め登録された複数のユーザのリストを表示装置10に表示し、その表示装置10に表示されたリストから、操作スイッチ群7又はリモコン17の操作により、運転者がどのユーザを選択したかによって判定する。ユーザ情報は、ベイジアンネットワークモデル20における観測変数であるので、ユーザ情報取得部81は、観測変数取得部に該当する。
【0071】
同乗者判定部82は、着座センサ18から供給される信号に基づいて、同乗者の有無を判定する。なお、同乗者の有無はベイジアンネットワークモデル20における観測変数であるので、この同乗者判定部82は観測変数取得部に該当する。目的地推定部83は、ユーザによって目的地が設定されていないときに目的地の推定を実行するが、ユーザによって目的地が設定されているときにも、その目的地までの中間的な目的地である立ち寄り地を推定するために、実行することもできる。
【0072】
目的地推定部83は、ユーザ情報取得部81において取得した年齢及び職業と、車両内部に設けられた図示しない時計からの信号に基づいて決定される時間帯と、送受信機11を介して得られる曜日情報と、同乗者判定部82によって判定された同乗者の有無とを、ベイジアンネットワーク20の年齢ノード32、職業ノード34、時間帯ノード42、曜日ノード44、同乗者ノード46にそれぞれ入力して、目的地ノード50の各目的地候補の尤度を求める。なお、送受信機11を介して得られる曜日情報は、ベイジアンネットワークモデル20における観測変数であるので、送受信機11は観測変数取得部に該当する。
【0073】
候補排除部84は、目的地推定部83にて目的地として推定される目的地候補から、確信度が所定の閾値より低いと判断される目的地候補を排除する。目的地推定部83は、候補排除部84によって一部の目的地候補が排除されて残った目的地候補のうちの、尤度の最も高い目的地候補を目的地として推定する。
【0074】
上記の確信度とは、当該目的地候補が日常的に行く場所であると確信できる度合いである。即ち、目的地推定部83は、日常的に行かない目的地候補を除いて、尤度の最も高い目的地候補を目的地として推定する。確信度が所定の閾値より高いか低いかは、学習データ記憶部9bに記憶された学習データ、即ち過去の履歴に基づいて求められる。確信度が高い目的地候補には、実際に日常的に行っている場所及び日常的に行く可能性がある場所が含まれる。
【0075】
候補排除部84は、単に、履歴に基づいて、当該目的地候補に過去に何回目的地とされたかという観点だけでなく、履歴に含まれる目的地とされた日時(単に日付のみでもよい)に基づいて、確信度、即ち当該目的地候補が日常的に行く場所であると確信できる度合いを求める。具体的には、本実施の形態では、具体的には、本実施の形態では、確信度は、(a)直近の一定回数の行動において目的地とされた割合、(b)最後に目的地とされた日以後の行動回数、(a’)直近の一定期間において目的地とされた割合、又は(b’)最後に目的地とされた日までの期間に基づいて求められてよい。
【0076】
確信度は、連続的な値であってもよいし、離散的な値であってもよい。例えば、(a)について、直近の一定回数の行動において目的地とされた割合をそのまま確信度としてもよいし、直近の一定回数の行動において目的地とされた割合が0%、0〜50%、50〜100%のそれぞれの場合について、確信度を0、1、2としてもよい。
【0077】
上記の(a)は、実際に日常的に行っている場所を判断するための条件である。例えば、毎年1回習慣的に行く場所は、数年にわたって通行履歴を学習していくことで、その場所に行った回数が増加し、全通行履歴におけるその場所に行った割合が増加していくことがあるが、このような場所を日常的に行く場所とするのは適切でない。
【0078】
そこで、(a)では、直近の一定回数の行動においてその目的地候補が目的地とされた割合に基づいて確信度を求めている。例えば、毎日1往復の通行(毎日2回の行動)を行なうことを想定して、直近の1ヶ月(行動回数は60回)において、2週間に1回以上の割合で行っている場所を、日常的に行っている場所(確信度:1)とし、2日に1回以上の割合で言っている場所を、日常的かつ頻繁に行っている場所とする場合(確信度:2)とする場合には、直近の60回の行動において目的地とされた割合が、0%以上4%未満の場合は確信度を0とし、4%以上25%未満の場合は確信度を1とし、25%以上の場合は確信度を2とすることができる。
【0079】
また、上記の(b)は、日常的に行く可能性がある場所を判断するための条件である。即ち、これまでに1回しか行ったことがない場所であっても、それがごく最近行った場所であれば、今現在、再び行く(即ち日常的に行くことになる)可能性が高いといえるが、逆に、例えば数年前には頻繁に通っていたが最近はまったく行っていないといった場所は、全通行履歴におけるその場所に行った割合が高い場合があるが、今現在では再び行く可能性は低い(即ち、日常的に行かなくなっている)といえる。
【0080】
そこで、(b)では、その目的地が最後に目的地とされた日から現在までの間の行動回数に基づいて確信度を求めている。例えば、上記のように毎日1往復の行動(毎日2回の行動)を行なうことを想定した場合に、最後に目的地とされた日から現在までの間の行動回数が、3回未満の場合は確信度を2とし、3回以上14回未満の場合は確信度を1とし、14回以上の場合は確信度を0とすることができる。
【0081】
上記の(a’)及び(b’)は、それぞれ(a)及び(b)における行動回数を期間で置き換えたものである。確信度は(a)又は(a’)及び(b)又は(b’)を適宜に組み合わせて求めてもよい。例えば、(a)と(b’)を組み合わせることで、直近の一定回数の行動において目的地とされた割合(a)が比較的小さい場合でも、最後に目的地とされた日までの期間(b’)が短ければ、ユーザは今現在再び行く可能性が高いとすることができ、また、直近の一定回数の行動において目的地とされた割合(a)が大きければ、最後に目的地とされた日までの期間(b’)が比較的長くても、目的地とされる可能性は低くないとするという柔軟な対応が可能になる。
【0082】
なお、上記の(a)における一定回数や(a’)における一定期間は、ユーザの行動頻度に応じて調整してもよい。即ち、ユーザの行動頻度が高い場合には、(a)における一定回数を大きくし、又は(a’)における一定期間を短く、ユーザの行動頻度が低い場合には、(a)における一定回数を小さくし、又は(a’)における一定期間を長くしてよい。
【0083】
候補排除部84は、目的地推定部83において目的地として推定され得る目的地候補のうちの、その確信が所定の閾値より小さい目的地候補を排除する。上述のように学習データ記憶部9bには、学習データとして、日付を含む履歴が記憶されているので、候補排除部84は、その学習データを参照することで、上記の(a)、(b)、(a’)、(b’)を取得することができる。目的地推定部83は、候補排除部84によって一部の目的地候補が排除された後に残った目的地候補の中で尤度の最も高い目的地候補を目的地として推定する。目的地推定部83は、推定した目的地を経路探索部85に出力する。
【0084】
経路探索部85は、地図データ入力器6から入力される地図データに基づいて、位置検出器1によって検出された車両の現在位置から目的地推定部83で推定した目的地までの経路を探索する。この経路探索には、コスト評価関数記憶部9cに記憶された式(1)に示すコスト評価関数Ciを用い、例えば、ダイクストラ法などの公知の手法によって、式(1)に示すコスト評価関数Ciの値が最小となるような経路を探索する。
【0085】
経路探索部85は、送受信機11から交通渋滞情報及び交通規制情報を含む道路交通情報を取得して、交通渋滞情報や交通規制情報がある場合には、それらを考慮して最適な経路を探索する。具体的には、交通渋や交通規制があればそれらを避けるように、最適な経路を探索する。そして、探索された経路に関する関連情報がある場合は、表示装置10によって表示し、又はスピーカ13によって音声で出力する。例えば、経路の途中にある施設のイベント情報等があれば、適宜のタイミングでこの情報をユーザに提供する。このとき、表示装置10やスピーカ13は、関連情報提示部に該当する。
【0086】
ナビゲーション部86は、経路探索部85によって探索された経路、位置検出器1によって逐次検出される車両の現在位置、及び、地図データ入力器6からの地図データに基づいて、経路案内を実行する。
【0087】
学習部86は、学習データ記憶部9bに記憶された学習データに基づいて、ベイジアンネットワークモデル20の学習を実行する。学習部86は、新たな学習データが追加されたときに学習を実行してもよいし、所定の学習周期で定期的に学習を実行してもよい。上述のように、学習データ記憶部9bに記憶される学習データは、年齢、職業、時間帯、曜日、同乗者の有無、実際に目的地とされた場所、及び日付が一組になったデータである。この学習データは、目的地が確定するごとに学習データ記憶部9bに追加される。なお、学習データ中の日付の情報は、ベイジアンネットワークモデル20の学習には用いられないが、上述のように、目的地候補の中から確信度が所定の閾値より低い目的地候補を排除する際に、候補排除部84によって用いられる。
【0088】
目的地の確定は以下のようにして行なう。まず、目的地を推定した場合において、通行の後に駐車を判定したときは、その駐車位置を目的地として確定する。また、ユーザによって目的地が設定された場合は、その設定された目的地をそのまま目的地として確定する。学習データとして記憶するための年齢及び職業は、ユーザ情報取得部81から得られ、同乗者の有無は同乗者判定部82から得られ、日付及び曜日は送受信機11から得られる。
【0089】
図4は、ユーザ情報を外部メモリ9のユーザ情報記憶部9dに記憶する処理のフローチャートである。まず、ユーザ名と、ユーザ情報及びユーザ情報を決定するための情報(すなわち生年月日及び職業)とを入力してもらうための所定の入力画面を表示装置10に表示する(ステップS41)。
【0090】
続いて、ユーザ操作によって、それらユーザ名、生年月日、職業が入力されたか否かを判断する(ステップS42)。そして、ユーザ名、生年月日、職業が入力された場合には(ステップS42にてYES)、入力されたユーザ名、ユーザ情報及びユーザ情報を決定するための情報を、外部メモリ9のユーザ情報記憶部9dに記憶する(ステップS43)。
【0091】
図5は、目的地推定及び経路探索を行う処理のフローチャートである。まず、同乗者判定部82及び送受信機11が状況情報を取得して、それを学習データ記憶部9bに記憶し、目的地推定部83に出力する(ステップS51)。このために、同乗者判定部82は、着座センサ18からの信号に基づいて同乗者の有無を決定する。また、送受信機11は、曜日情報を取得し、さらに、車両内部に設けられた時計から信号を取得して時間帯を決定する。なお、この際に送受信機11は日付情報も取得して、これを学習データ記憶部9bに記憶する。
【0092】
続いて、ユーザ情報取得部81が、ユーザ情報を取得して、それを学習データ記憶部9bに記憶し、目的地推定部83に出力する(ステップS52)。このために、ユーザ情報取得部81は、外部メモリ9のユーザ情報記憶部9dにユーザ情報が記憶されているユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから操作スイッチ群7又はリモコン17の操作によって選択されたユーザに関する生年月日及び職業を、ユーザ情報記憶部9dから読み出す。そして、読み出した生年月日と上記ステップS51で取得した時計からの信号に基づいて、運転者の年齢を決定する。
【0093】
続いて、目的地推定部83が、外部メモリ9のユーザモデル記憶部9aに記憶されたベイジアンネットワークモデル20に、上記ステップS51で取得した状況情報(時間帯、曜日、同乗者)及びステップS52で取得したユーザ情報(年齢、職業)を入力して、目的地ノード50の各目的地候補の尤度を算出する(ステップS53)。そして、候補排除部84は、確信度が所定の閾値より小さい目的地候補を排除する(ステップS54)。
【0094】
次に、目的地推定部83は、ステップS54にて確信度が所定の閾値より小さい目的地候補が排除された後に残った目的地候補の中から、最も尤度の高い目的地候補を目的地として推定する(ステップS55)。そして、推定された目的地を経路探索部85及び表示装置10に出力する(ステップS56)。
【0095】
続いて、経路探索部85が、位置検出器1によって検出された車両の現在位置からステップS55で推定した目的地まで、式(1)に示す評価関数Ciの総コストが最小となるような経路を、ダイクストラ法等によって探索する(ステップS57)。このとき、交通渋滞情報や交通規制情報等の関連情報があれば、それを考慮して経路を探索する。そして、ナビゲーション部86は、ステップS57で探索された経路、位置検出器1によって逐次検出される車両の現在位置、及び地図データ入力器6からの地図データに基づいて、経路案内を実行する(ステップS58)。
【0096】
図6は、実際の行動に基づいて学習を行なう処理のフローチャートである。まず、駐車を判定したか否かを判断する(ステップS61)。駐車の判定は、ここでは、位置検出器1によって逐次検出される車両位置が所定時間同一場所であったことに基づいて行うこととするが、イグニッションキーのオン・オフに基づいて判定することも可能である。
【0097】
駐車が判定されていないときは(ステップS61にてNO)、本ルーチンを一旦終了するが、駐車が判定されたときは(ステップS61にてYES)、位置検出器1によって検出される現在の車両位置を駐車位置として決定し、その駐車位置を学習データ記憶部9bに記憶する(ステップS62)。
【0098】
次に、ベイジアンネットワークモデル20を学習するための学習データを作成する(ステップS63)。この学習データは、ベイジアンネットワークモデル20の各ノード32、34、42、44、46、50についての状態をそれぞれ1つずつ有する一組のデータであり、年齢ノード32と職業ノード34については、図5のステップS52で、時間帯ノード42、曜日ノード44、同乗者ノード46については、図5のステップS51で、それぞれ学習データ記憶部9bに記憶されている。また、目的地ノード50は、図6のステップS62で記憶した駐車位置である。
【0099】
そして、ステップS63で作成した学習データを用いて、ユーザモデル記憶部9aに記憶されているベイジアンネットワークモデル20の親ノードと子ノードとの間の依存性確率を修正する(学習する)(ステップS64)。この学習を繰り返すことにより、目的及び目的地の推定精度が次第に向上する。
【0100】
以上のように、本実施の形態のナビゲーションシステム100では、目的地推定部83が、入力されたユーザ情報及び状況情報をベイジアンネットワークモデル20に入力することにより、各目的地候補の尤度を求めるが、このとき、確信度が所定の閾値より小さい目的地候補を除外して、尤度の最も高い目的地候補を目的地として推定するので、ベイジアンネットワークモデル20を用いたベイズ推論の不完全性を補完して、日常的に行く場所ではない目的地候補を目的地として推定してしまうことを回避できる。
【0101】
なお、上記の実施の形態では、学習部87は、すべての過去の通行履歴を学習データとして用いて学習を行ない、ベイジアンネットワークモデル20を修正し、そのように修正されたベイジアンネットワークモデル20にユーザ情報及び状況情報を与えることで、各目的地候補の尤度を求めた。そして、この目的地候補には、確信度が所定の閾値よりも小さいものも含まれているため、それらを除いて、最も尤度の高いものを目的地として推定した。本発明はこのような実施形態に限られない。
【0102】
変形例のナビゲーションシステムにおいて、学習部87は、学習データ記憶部9bに記憶されているデータ(年齢、職業、時間帯、曜日、同乗者の有無、実際に目的地とされた場所、日付が一組になっている)に対して、確信度を所定の閾値と比較して、閾値より高いもののみを学習データとして採用して、ベイジアンネットワークモデル20を修正して(学習して)もよい。この場合には、目的地推定部83は、ベイジアンネットワークモデル20にユーザ情報及び状況情報を与えて得られた各目的地候補のうちの尤度が最も高いものをそのまま推定結果とする。
【0103】
図7は、変形例のナビゲーションシステムの要部構成を示すブロック図である。変形例のナビゲーションシステム101では、候補排除部84’が、学習データ記憶部9bと学習部87との間に設けられている。候補排除部84’は、上述のいずれかの確定条件を採用して、学習データ記憶部9bに過去の履歴として記憶された学習データのうち、確定条件を満たさない学習データを排除して学習部9bに出力する。
【0104】
また、上記の実施の形態では、尤度が最も高い目的地候補を目的地として推定して(ステップS55)、自動的にその目的地への経路探索(ステップS57)及び経路案内(ステップS58)を行なったが、尤度が高い順に複数の目的地候補を表示装置10に表示して、ユーザに目的地を選択させてもよい。ユーザが目的地を選択すると、ユーザが自ら目的地を設定したのと同様に、その時点で目的地が確定する。
【0105】
また、上記の実施の形態では、目的地を推定した後に、自動で経路案内を行なったが(ステップS58)、ユーザが積極的に目的地を設定しないのは、その目的地までの経路を熟知しているからであると考えられるため、経路案内はしないようにして、経路探索(ステップS57)で探索された経路に関連する関連情報がある場合にのみ、それを提示するようにしてもよい。あるいは、経路探索(ステップS57)を行なった結果、その経路に関連する関連情報に基づいて、迂回ルートを提案する場合にのみ、迂回ルートを探索した上で経路案内をするようにしてもよい。これにより、熟知している経路について、自動で案内が開始されることによる煩わしさを回避できるとともに、有用な情報があればその情報を得ることができる。
【0106】
また、上記の実施の形態では、ユーザ情報取得部81は、予め登録された複数のユーザのリストを表示装置10に表示して運転者にそのリストから選択してもらうことで、運転者が誰であるかを判定したが、座席が電動であって、その座席位置を記憶するメモリ機能があり、ユーザごとに座席位置が記憶されている場合は、そのメモリ機能の利用と連動して運転者が誰であるかを判定してもよい。
【0107】
また、上記の実施の形態では、各目的地候補の確率を求めるのに、ベイジアンネットワークモデル20を用いたが、ニューラルネットワークモデル等の他の確率モデルを用いてもよい。また、ベイジアンネットワークモデル20の観測変数を適宜変更できることはいうまでもない。また、上記の実施の形態では、観測変数として、ユーザ情報と状況情報を用いた確率モデルを説明したが、観測変数は、状況情報のみ、又はユーザ情報のみであってよい。
【0108】
また、上記の実施の形態では、複数の確信度を例示したが、確信度は上記に例示したものに限られない。確信度は、過去の履歴に基づいて、日常的に行く場所ではないと判断されるものを排除できるものであればよい。例えば、確信度は、過去の履歴において、当該目的地候補が目的地とされた割合に基づいて求められてよく、当該目的地候補が目的地とされた回数に基づいて求められてもよい。例えば、過去の履歴において、目的地とされた割合が10%に満たない目的地候補を排除するようにしてよく、また、過去の履歴において、目的地とされた回数が3回未満(1回又は2回)である目的地候補を排除することとしてもよい。
【0109】
また、上記の実施の形態では、学習データは、目的地が確定するごとに学習データ記憶部9bに履歴として追加されるが、このとき、種々の条件に従って重みをつけて履歴を記憶してもよい。
【0110】
過去に目的地とされた場所の履歴は、履歴のレコードごとに重みのデータを有する。即ち、上記の実施の形態では、履歴のすべてのレコードが同じ重みを持っていたが、この変形例では、種々の状況に応じて、例えば、1.5回目的地とされた、0.5回目的地とされた、・・・というように、異なる重みを持つ。重みは、例えば、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否か、出発地から当該場所までの距離、及び当該場所がランドマークであるか否かに応じて付与される。以下、具体例を説明する。
【0111】
ある場所が目的地とされたときに、それがユーザによって目的地として設定されたことにより目的地として確定したものである場合は、重みを小さくとし、ユーザ自身が目的地を設定することなくその場所に着いたことでその場所が目的地として確定した場合には、重みを大きくとしてよい。例えば、ユーザがナビゲーションシステムにおいて目的地として設定することで目的地とされた場所については、その場所に1回行ったものとしてカウントし、ユーザがナビゲーションシステムにその場所を目的地として設定することなく(当該場所が目的地として推定された場合を含む)、当該場所に着いた場合には、その場所に2回行ったものとしてカウントする。これは、ユーザが目的地として設定した場所はユーザが行き慣れていない場所である可能性が比較的高いと考えられ、一方、ユーザが目的地として設定することなく到達した場所であれば、その場所はユーザが行き慣れている場所である可能性が比較的高いと考えられるからである。
【0112】
また、ある場所が目的地とされた場合に、出発地から当該場所までの距離に応じた重みを付与してもよい。例えば、出発地から目的地とされた場所までの距離が1km未満であれば、重みを0.5とし、1km以上10km未満であれば、重みを1とし、10km以上であれば、重みを1.5とする。なお、距離は直線距離であってもよいし、経路に沿った走行距離であってもよい。このように、出発地から目的地とされた場所までの距離が長いほど大きな重みを付与するのは、出発地から目的地とされた場所までの距離が長い場合には、より確実な目的をもってそこに行った可能性が比較的高いと考えられ、逆に出発地から目的地とされた場所までの距離が短い場合には、たまたまそこで停車した等の理由によりそこが目的地とされた場合が比較的高いと考えられるからである。
【0113】
また、ある場所が目的地とされた場合に、その場所が多くの人が集まる場所(例えば、有名な商業施設(百貨店等)、娯楽施設(遊園地、公園等)、観光地等)であるか否かに応じた重みを付与してもよい。多くの人が集まる場所であるか否かは、例えば、駐車場の収容台数に応じて決定してよく、ユーザの主観で決定してもよい。また、複数のユーザにおいて目的地とされた場所の履歴を集計して、実際にどのくらいの人がその場所を目的地としているかを調べて、その場所が多くの人が集まる場所であるかを決定してもよい。そして、例えば、目的地とされた場所が、多くの人が多く集まる場所である場合には、重みを3とし、多くの人が集まる場所でない場合には重みを1とする。このように、一般的に多くの人が集まる場所に大きな重みを付与するのは、多くの人が集まる場所であれば、そこが目的地とされる可能性は比較的高いと考えられるからである。
【0114】
候補排除部84は、上記の実施の形態と同様にして目的地である確信度を求めるが、このとき、例えば、当該場所が目的地とされた割合を求める際には、重みに基づいて割合を求める。例えば、10回の行動において、ある場所の履歴として、重み2の履歴と重み1の履歴があるとすると、その10回の行動において当該場所が目的地とされた割合は、(2+1)/10=30%となる。
【0115】
なお、候補排除部84は、この変形例のように履歴に重みが付与されている場合に、上記の実施の形態のように日時を考慮して確信度を求めるのではなく、日時を考慮せずに確信度を求めてよい。即ち、この変形例によれば、履歴における日時を考慮しなくても、目的地とされる確信度を求めて、その確信度が低い目的地候補を排除することができる。
【0116】
なお、重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否か、出発地から当該場所までの距離、及び当該場所が、多くの人が集まる場所であるか否かのうちの一部のみに基づいて付与されてもよく、また、他の要因に応じて付与されてもよい。
【0117】
また、ナビゲーションシステム100は、車両に搭載されるものであってもよいし、持ち歩ける形式のものであってもよい。
【産業上の利用可能性】
【0118】
本発明は、目的地の推定精度が向上するという効果を有し、過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置等として有用である。
【符号の説明】
【0119】
1 位置検出器
2 地磁気センサ
3 ジャイロスコープ
4 距離センサ
5 GPS受信機
6 地図データ入力器
7 操作スイッチ群
8 制御装置
81 ユーザ情報取得部
82 同乗者判定部
83 目的地推定部
84 候補排除部
84’ 候補排除部
85 経路探索部
86 ナビゲーション部
87 学習部
9 外部メモリ
9a ユーザモデル記憶部
9b 学習データ記憶
9c コスト評価関数記憶部
9d ユーザ情報記憶部
10 表示装置
11 送受信機
12 音声コントローラ
13 スピーカ
14 音声認識装置
15 マイク
16 リモコンセンサ
17 リモコン
18 着座センサ
【特許請求の範囲】
【請求項1】
過去に目的地とされた場所の履歴を記憶する履歴記憶部と、
前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、
前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、
観測変数を取得する観測変数取得部と、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、
を備え、
前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、
前記候補排除部は、前記目的地推定部にて確率が求められた前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、前記確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする目的地推定装置。
【請求項2】
過去に目的地とされた場所の履歴を記憶する履歴記憶部と、
前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、
前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、
観測変数を取得する観測変数取得部と、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、
前記履歴における前記目的地とされた場所を前記目的地候補として、前記モデル記憶部に記憶される前記確率モデルを学習する学習部と、
を備え、
前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、
前記候補排除部は、前記学習部にて学習に用いられる前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする目的地推定装置。
【請求項3】
前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、日付の情報が含まれており、
前記候補排除部は、前記日付の情報に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項4】
前記確信度は、直近の一定回数の行動において当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項5】
前記確信度は、当該目的地候補が最後に目的地とされた日以後の行動回数に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項6】
前記確信度は、直近の一定期間の行動において当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項7】
前記確信度は、当該目的地候補が最後に目的地とされた日までの期間に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項8】
前記確信度は、直近の一定回数の行動において当該目的地候補が目的地とされた割合又は直近の一定期間の行動において当該目的地候補が目的地とされた割合、及び当該目的地候補が最後に目的地とされた日以後の行動回数又は当該目的地候補が最後に目的地とされた日までの期間に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項9】
前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項10】
前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた回数に基づいて求められることを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項11】
前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、重みが付与されており、
前記確信度は、前記重みを考慮して求められる
ことを特徴とする請求項1ないし10のいずれか一項に記載の目的地推定装置。
【請求項12】
前記重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否かに応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項13】
前記重みは、出発地から当該場所までの距離に応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項14】
前記重みは、当該場所が、多くの人が集まる場所であるか否かに応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項15】
請求項1ないし14のいずれか一項に記載の目的地推定装置と、
前記目的地推定部にて推定された目的地までの経路を探索する経路探索部と、
を備えたことを特徴とするナビゲーションシステム。
【請求項16】
前記経路探索部にて探索された経路に関連する関連情報を提示する関連情報提示部をさらに備えたことを特徴とする請求項15に記載のナビゲーションシステム。
【請求項17】
前記経路探索部は、交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索することを特徴とする請求項15に記載のナビゲーションシステム。
【請求項18】
過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップと、
を含み、
前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定方法。
【請求項19】
過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップと、
を含み、
前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定方法。
【請求項20】
目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップと、
をコンピュータに実行させるための目的地推定プログラムであって、
前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定プログラム。
【請求項21】
目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップと、
をコンピュータに実行させるための目的地推定プログラムであって、
前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定プログラム。
【請求項1】
過去に目的地とされた場所の履歴を記憶する履歴記憶部と、
前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、
前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、
観測変数を取得する観測変数取得部と、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、
を備え、
前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、
前記候補排除部は、前記目的地推定部にて確率が求められた前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、前記確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする目的地推定装置。
【請求項2】
過去に目的地とされた場所の履歴を記憶する履歴記憶部と、
前記履歴記憶部に記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部と、
前記目的地推定部にて目的地として推定される目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部と、
観測変数を取得する観測変数取得部と、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを記憶するモデル記憶部と、
前記履歴における前記目的地とされた場所を前記目的地候補として、前記モデル記憶部に記憶される前記確率モデルを学習する学習部と、
を備え、
前記目的地推定部は、前記モデル記憶部に記憶された確率モデルに基づいて、前記観測変数取得部にて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定し、
前記候補排除部は、前記学習部にて学習に用いられる前記目的地候補から、前記履歴記憶部に記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする目的地推定装置。
【請求項3】
前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、日付の情報が含まれており、
前記候補排除部は、前記日付の情報に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する
ことを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項4】
前記確信度は、直近の一定回数の行動において当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項5】
前記確信度は、当該目的地候補が最後に目的地とされた日以後の行動回数に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項6】
前記確信度は、直近の一定期間の行動において当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項7】
前記確信度は、当該目的地候補が最後に目的地とされた日までの期間に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項8】
前記確信度は、直近の一定回数の行動において当該目的地候補が目的地とされた割合又は直近の一定期間の行動において当該目的地候補が目的地とされた割合、及び当該目的地候補が最後に目的地とされた日以後の行動回数又は当該目的地候補が最後に目的地とされた日までの期間に基づいて求められることを特徴とする請求項3に記載の目的地推定装置。
【請求項9】
前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた割合に基づいて求められることを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項10】
前記確信度は、前記履歴記憶部に記憶されたすべての履歴における、当該目的地候補が目的地とされた回数に基づいて求められることを特徴とする請求項1又は2に記載の目的地推定装置。
【請求項11】
前記通行履歴記憶部に記憶される過去に目的地とされた場所の履歴には、重みが付与されており、
前記確信度は、前記重みを考慮して求められる
ことを特徴とする請求項1ないし10のいずれか一項に記載の目的地推定装置。
【請求項12】
前記重みは、当該場所が、ユーザが目的地して設定したことにより目的地とされたか否かに応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項13】
前記重みは、出発地から当該場所までの距離に応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項14】
前記重みは、当該場所が、多くの人が集まる場所であるか否かに応じて、付与されていることを特徴とする請求項11に記載の目的地推定装置。
【請求項15】
請求項1ないし14のいずれか一項に記載の目的地推定装置と、
前記目的地推定部にて推定された目的地までの経路を探索する経路探索部と、
を備えたことを特徴とするナビゲーションシステム。
【請求項16】
前記経路探索部にて探索された経路に関連する関連情報を提示する関連情報提示部をさらに備えたことを特徴とする請求項15に記載のナビゲーションシステム。
【請求項17】
前記経路探索部は、交通渋滞情報及び交通規制情報を含む関連情報に基づいて経路を探索することを特徴とする請求項15に記載のナビゲーションシステム。
【請求項18】
過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップと、
を含み、
前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定方法。
【請求項19】
過去に目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップと、
を含み、
前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定方法。
【請求項20】
目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求める確率取得ステップと、
をコンピュータに実行させるための目的地推定プログラムであって、
前記候補排除ステップは、前記確率取得ステップにて確率が求められた前記目的地候補から、前記確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的推定ステップは、前記候補排除ステップにて前記目的地候補が排除された後に、残った前記目的地候補のうちの、前記確率取得ステップにて求めた確率が高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定プログラム。
【請求項21】
目的地とされた場所の履歴を記憶する履歴記憶ステップと、
前記履歴記憶ステップにて記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定ステップと、
前記目的地推定ステップにて目的地として推定される目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除ステップと、
観測変数を取得する観測変数取得ステップと、
前記履歴における前記目的地を前記目的地候補として、前記観測変数に対する前記複数の目的地候補の確率を求めるための確率モデルを学習する学習ステップと、
をコンピュータに実行させるための目的地推定プログラムであって、
前記候補排除ステップは、前記学習ステップにて学習に用いられる前記目的地候補から、前記履歴記憶ステップにて記憶された前記履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除し、
前記目的地推定ステップは、前記学習ステップによって学習された前記確率モデルに基づいて、前記観測変数取得ステップにて取得された前記観測変数に対する前記複数の目的地候補の確率を求めて、確率の高い目的地候補を前記目的地として推定する
ことを特徴とする目的地推定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−251954(P2012−251954A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−126774(P2011−126774)
【出願日】平成23年6月6日(2011.6.6)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月6日(2011.6.6)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]