
目的走行位置設定装置及び操舵制御システム
【課題】走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定し、設定した目標走行位置で車両を走行させる。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的走行位置設定装置及び操舵制御システムに関する。
【背景技術】
【0002】
特開2003−26026号公報には、車線内に目標車線内位置を設定し、設定した目標車線内位置を車両が走行するように操舵アクチュエータを制御して、車両の車線内走行を維持する自動操舵装置が記載されている。目標車線内位置は、自動操舵制御の開始時の車両の車線の幅方向の位置に設定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−26026号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の装置では、目標走行位置は、操舵制御が終了するまで開始当初の設定位置に維持される。しかし、操舵制御の開始時に目標走行位置を車線内の好適な位置に設定した場合であっても、隣接車線を他車両が並走する場合などのように走行中に周囲の状況が変化すると、当初の設定位置が必ずしも好適な目標走行位置とはならない可能性が生じる。
【0005】
そこで、本発明は、走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく、本発明の第1の態様の目的走行位置設定装置は、車線認識手段と目標走行位置設定手段と左側接近車両検出手段と右側接近車両検出手段とを備える。車線認識手段は、自車両が走行する前方の車線を認識する。目標走行位置設定手段は、自車両の目標走行位置を車線認識手段が認識した車線内に設定する。左側接近車両検出手段は、自車両の左側を自車両と同方向に走行する他車両のうち自車両の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する。右側接近車両検出手段は、自車両の右側を自車両と同方向に走行する他車両のうち自車両の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する。この場合、目標走行位置設定手段は、左側接近車両検出手段と右側接近車両検出手段とがともに接近車両を検出しない場合、車線の幅方向における所定の標準位置に目標走行位置を設定し、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出しない場合、標準位置よりも右側の右偏向位置に目標走行位置を設定し、右側接近車両検出手段が右側の接近車両を検出し、且つ左側接近車両検出手段が左側の接近車両を検出しない場合、標準位置よりも左側の左偏向位置に目標走行位置を設定する。
【0007】
上記構成では、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向における所定の標準位置に目標走行位置が設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側に目標走行位置が設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側に目標走行位置が設定される。左側の接近車両とは、自車両の左側を自車両と同方向に走行する他車両のうち所定の左範囲内に進入する車両であり、右側の接近車両とは、自車両の右側を自車両と同方向に走行する他車両のうち所定の右範囲内に進入する車両である。
【0008】
このため、他車両が自車両からある程度離間して走行している場合には、所定の標準位置を適切に設定することによって、車線の幅方向の中央のように自車両及び他車両が安全に走行することができる位置に目標走行位置を設定することができる。また、自車両が走行する車線の左側の隣接車線を自車両と並行して走行する左側方車両が自車両の前方に進路を変更するために自車両の左側に接近してくるときのように、他車両が自車両の左側又は右側に接近してくる場合や、左側方車両が隣接車線の右端を走行しているときのように、他車両が自車両の左側又は右側に接近する位置で走行している場合には、標準位置よりも右側又は左側の他車両の接近を回避する位置に目標走行位置を設定することができる。従って、走行中の周囲の状況の変化に応じて、他車両との接触の回避が容易であり安全性の高い位置に目標走行位置を設定することができる。
【0009】
また、本発明の第2の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、左側接近車両検出手段は、自車両から左側の接近車両までの車線の幅方向に沿った左側距離を検出し、右側接近車両検出手段は、自車両から右側の接近車両までの車線の幅方向に沿った右側距離を検出し、目標走行位置設定手段は、左側接近車両検出手段が検出した左側距離に基づいて右偏向位置を設定し、右側接近車両検出手段が検出した右側距離に基づいて左偏向位置を設定する。
【0010】
上記構成では、左側の接近車両のみが検出された場合には、自車両から左側の接近車両までの車線の幅方向に沿った左側距離に基づいて目標走行位置が設定され、右側の接近車両のみが検出された場合には、自車両から右側の接近車両までの車線の幅方向に沿った右側距離に基づいて目標走行位置が設定される。このため、左側距離又は右側距離を確実に保持することができる位置に目標走行位置を設定することができる。
【0011】
また、本発明の第3の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、目標走行位置設定手段は、標準位置から車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に右偏向位置を設定し、標準位置から車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に左偏向位置を設定する。
【0012】
上記構成では、目標走行位置は、左側の接近車両のみが検出された場合には、標準位置から車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に設定され、右側の接近車両のみが検出された場合には、標準位置から車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に設定される。第1の所定距離及び第2の所定距離は、車幅等に基づいて予め設定された一定の値であってもよく、予め設定された一定の割合と車線幅等とに基づいて設定されるような変動する値であってもよい。このため、自車両から接近車両までの距離の検出や各種演算など目標走行位置を設定するための準備処理を簡素化して、周囲の状況に応じた好適な位置に目標走行位置を設定することができる。
【0013】
また、本発明の第4の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、左側接近車両検出手段は、自車両から左側の接近車両までの車線の幅方向に沿った左側距離を検出し、右側接近車両検出手段は、自車両から右側の接近車両までの車線の幅方向に沿った右側距離を検出し、目標走行位置設定手段は、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出した場合、左側接近車両検出手段が検出した左側距離と右側接近車両検出手段が検出した右側距離とに基づいて目標走行位置を設定する。
【0014】
上記構成では、左側の接近車両及び右側の接近車両がともに検出された場合には、左側距離と右側距離とに基づいて目標走行位置が設定される。このため、例えば左側の接近車両と右側の接近車両との中間位置のように、左側距離及び右側距離を可能な限り保持することができる位置に目標走行位置を設定することができる。
【0015】
また、本発明の第5の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、目標走行位置設定手段は、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出した場合、標準位置に目標走行位置を設定する。
【0016】
上記構成では、左側の接近車両及び右側の接近車両がともに検出された場合には、標準位置に目標走行位置が設定される。このため、目標走行位置を設定するための準備処理を簡素化して、周囲の状況に応じた好適な位置に目標走行位置を設定することができる。
【0017】
また、本発明の第6の態様の目的走行位置設定装置は、上記第1〜第5の態様の何れかの目的走行位置設定装置であって、目標走行位置設定手段が設定した目標走行位置を運転者に報知する報知手段を備える。
【0018】
上記構成では、設定された目標走行位置が運転者に報知される。このため、運転者が目標走行位置を確実に認識することができる。
【0019】
また、本発明の操舵制御システムは、上記第1〜第6の態様の何れかの目標走行位置設定装置と現走行位置検出手段とトルク発生手段と操舵角検出手段と制御手段とを備える。現走行位置検出手段は、車線認識手段が認識した車線の幅方向における自車両の現在の走行位置を検出する。トルク発生手段は、自車両の操舵軸にトルクを付与する。操舵角検出手段は、自車両の操舵角を逐次検出する。制御手段は、目標走行位置設定手段が設定した目標走行位置と現走行位置検出手段が検出した現在の走行位置と操舵角検出手段が検出した操舵角とを用いて、現在の走行位置から目標走行位置へ自車両を走行させるために必要な操舵トルク算出し、算出した操舵トルクをトルク発生手段に発生させる。
【0020】
上記構成では、自車両が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクが自車両の操舵軸に付与される。このため、走行中の周囲の状況に応じた好適な位置で自車両を走行させることができ、他車両との接触の回避を容易にし、走行の安全性を向上させることができる。
【発明の効果】
【0021】
本発明によれば、走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定することができる。
【図面の簡単な説明】
【0022】
【図1】一実施形態の操舵制御システムの構成図である。
【図2】コントローラが実行する処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、本発明の一実施形態の操舵制御システム1について、図面を参照して説明する。図1は、一実施形態の操舵制御システムの構成図である。図2は、コントローラが実行する処理を示すフローチャートである。なお、以下の説明において、左右方向は、車両2の進行方向に対する各方向を示す。
【0024】
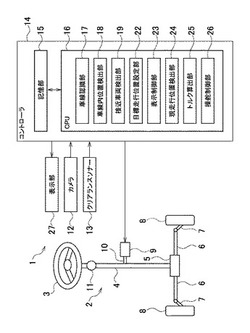
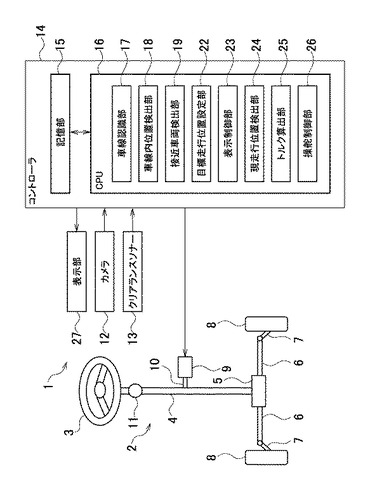
図1に示すように、本実施形態の操舵制御システム1は、車両に設けられ、目標走行位置を設定し、設定した目標操舵位置を車両が走行するように操舵を制御して、車両の車線内走行を維持するものであり、モータ9と操舵角センサ11とカメラ12とクリアランスソナー13とコントローラ14と表示部27とを備える。本実施形態の操舵制御システム1が設けられる車両(自車両)2は、ステアリングホイール3と操舵輪8とが、ステアリングシャフト4、ステアリングギアボックス5、ラック軸6及びタイロッド7を介して機械的に連結されている。
【0025】
モータ9は、回転軸10を有し、回転軸10の一端がステアリングシャフト4にギア(図示省略)を介して連結されている。モータ9は、コントローラ14によって動作を制御され、所望のトルクを出力してステアリングシャフト4に付与する。すなわち、モータ9は、車両2のステアリングシャフト4にトルクを付与するトルク発生手段として機能する。
【0026】
操舵角センサ11は、ステアリングシャフト4に設けられ、所定時間毎にステアリングシャフト4の操舵角を逐次検出し、検出した操舵角をコントローラ14へ出力する。すなわち、操舵角センサ11は、車両2の操舵角を逐次検出する操舵角検出手段として機能する。
【0027】
カメラ12は、CCD(Charge Coupled Device)センサやCMOS(Complementary Metal Oxide Semiconductor)センサ等の撮像素子を有し、車両2のフロントウインドウパネル(図示省略)の上部の幅方向の略中心に配置されるルームミラー(図示省略)の裏面に設けられる。カメラ12は、車両2の前方の動画像を撮像し、撮像した動画像を構成する静止画像をデジタル変換してコントローラ14に順次出力する。
【0028】
クリアランスソナー13は、車両2の左側部及び右側部にそれぞれ複数設けられる。クリアランスソナー13は、所定時間毎に、車両2の左方、左前方及び左後方、並びに右方、右前方及び右後方に向かって超音波を発信し、他車両等の物体に反射した超音波を受信することによって物体を検知し、検知した検知信号をコントローラ14に出力する。
【0029】
コントローラ14は、記憶部15とCPU(Central Processing Unit)16とを有する。
【0030】
記憶部15は、例えばRAM(Random Access Memory)などの記録媒体によって構成され、CPU16が各種処理を実行するための各種プログラムや各種データが記憶されている。各種プログラムには、CPU16が目標走行位置設定処理を実行するための目標走行位置設定処理プログラムや操舵制御処理を実行するための操舵制御処理実行プログラムが含まれる。各種データには、車両2の車幅等を含む車両情報が含まれる。また、記憶部15は、各種画像や各種情報などが読み書き自在に記憶される記憶領域を有する。
【0031】
CPU16は、目標走行位置設定プログラム及び操舵制御処理実行プログラムを実行することによって、車線認識部17、車線内位置検出部18、現走行位置検出部19、接近車両検出部20、目標走行位置設定部23、表示制御部24、トルク算出部25及び操舵制御部26として機能する。
【0032】
車線認識部17は、カメラ12から入力された静止画像をエッジ処理することによって、道路に表示された区画線を検出し、車両2が走行する車線を認識する。すなわち、カメラ12と車線認識部17とは、車両2が走行する前方の車線を認識する車線認識手段として機能する。
【0033】
車線内位置検出部18は、車線認識部17が認識した車線において、車線の幅方向の中央(標準位置)、右偏向位置及び左偏向位置を検出する。右偏向位置は、標準位置から車線の幅方向に沿って車線幅の所定の割合の長さだけ右側に離間した位置であり、左偏向位置は、標準位置から車線の幅方向に沿って車線幅の所定の割合の長さだけ左側に離間した位置である。所定の割合は、車両が右偏向位置又は左偏向位置を走行した場合に、車両2の右側部又は左側部から区画線までの距離が、隣接する車線を走行する他車両の運転者に危機感を与えない程度に保持可能な値に設定される。
【0034】
接近車両検出部19は、左側接近車両検出部20と右側接近車両検出部21とを有する。左側接近車両検出部20は、車両2の左側部に設けられたクリアランスソナー13から入力された検知信号を用いて、車両2の左側の接近車両を検出する。具体的には、左側接近車両検出部20は、左側部のクリアランスソナー13が検知した物体のうち、所定時間以上継続して検知された物体を検出し、車両2から当該物体までの車線の幅方向に沿った距離(左側距離)を算出する。左側距離を算出した左側接近車両検出部20は、算出した左側距離が閾値以下であるか否かを判定し、閾値以下であると判定したときに、当該物体を左側の接近車両として検出する。すなわち、クリアランスソナー13と左側接近車両検出部20とは、車両2の左側を車両2と同方向に走行する他車両のうち車両2の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する左側接近車両検出手段として機能する。
【0035】
右側接近車両検出部21は、車両2の右側部に設けられたクリアランスソナー13から入力された検知信号を用いて、車両2の右側の接近車両を検出する。具体的には、右側接近車両検出部21は、右側部のクリアランスソナー13が検知した物体のうち、所定時間以上継続して検知された物体を検出し、車両2から当該物体までの車線の幅方向に沿った距離(右側距離)を算出する。右側距離を算出した右側接近車両検出部21は、算出した右側距離が閾値以下であるか否かを判定し、閾値以下であると判定したときに、当該物体を右側の接近車両として検出する。すなわち、クリアランスソナー13と右側接近車両検出部21とは、車両2の右側を車両2と同方向に走行する他車両のうち車両2の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する右側接近車両検出手段として機能する。
【0036】
目標走行位置設定部22は、接近車両検出部19の検出結果に基づいて目標走行位置を設定する。目標走行位置設定部22は、左側接近車両検出部20と右側接近車両検出部21とがともに接近車両を検出しない場合、車線内位置検出部18が検出した標準位置に目標走行位置を設定する。左側接近車両検出部20が左側の接近車両を検出し、且つ右側接近車両検出部21が右側の接近車両を検出しない場合、目標走行位置設定部22は、車線内位置検出部18が検出した右偏向位置に目標走行位置を設定する。右側接近車両検出部21が右側の接近車両を検出し、且つ左側接近車両検出部20が左側の接近車両を検出しない場合、目標走行位置設定部22は、車線内位置検出部18が検出した左偏向位置に目標走行位置を設定する。
【0037】
また、目標走行位置設定部22は、左側接近車両検出部20が左側の接近車両を検出し、且つ右側接近車両検出部21が右側の接近車両を検出した場合、左側接近車両検出部20が算出した左側距離と右側接近車両検出部21が算出した右側距離とを用いて、左側の接近車両と右側の接近車両との中間位置を算出し、算出した中間位置に目標走行位置を設定する。すなわち、車線内位置検出部18と目標走行位置設定部22とは、車両2の目標走行位置を車線認識部17が認識した車線内に設定する目標走行位置設定手段として機能する。
【0038】
表示制御部23は、目標走行位置設定部22が設定した目標走行位置を表示部27に出力する。
【0039】
現走行位置検出部24は、車線認識部17が認識した車線の幅方向における車両2の現在の走行位置を検出する。すなわち、カメラ12と現走行位置検出部24とは、車線の幅方向における車両2の現在の走行位置を検出する現走行位置検出手段として機能する。
【0040】
トルク算出部25は、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部24が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、モータ9に発生させる操舵トルクを算出する。具体的には、トルク算出部25は、現在の走行位置と目標走行位置とを用いて、現在の走行位置から目標走行位置へ車両2を走行させるために必要な必要操舵角を算出する。必要操舵角を算出したトルク算出部25は、操舵角センサ11が所定時間毎に検出した操舵角を用いて、操舵角の変化量を算出し、算出した必要操舵角及び操舵角の変化量と最新の操舵角とを用いて、最新の操舵角から必要操舵角へステアリングシャフト4を回転させるために必要な操舵トルクを算出する。
【0041】
操舵制御部26は、トルク算出部25が算出した操舵トルクをモータ9に発生させる。すなわち、トルク算出部25と操舵制御部26とは、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部19が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、現在の走行位置から目標走行位置へ車両2を走行させるために必要な操舵トルクを算出し、算出した操舵トルクをモータ9に発生させる制御手段として機能する。
【0042】
表示部27は、車両2のインストルメントパネル(図示省略)に設けられ、表示制御部24から入力された目標走行位置を表示する。すなわち、表示制御部23と表示部27とは、目標走行位置設定部23が設定した目標走行位置を運転者に報知する報知手段として機能する。
【0043】
次に、図2を用いて、コントローラ14が実行する処理について説明する。本処理は、操舵制御システム1が作動しているとき、所定時間毎に繰り返して実行される。
【0044】
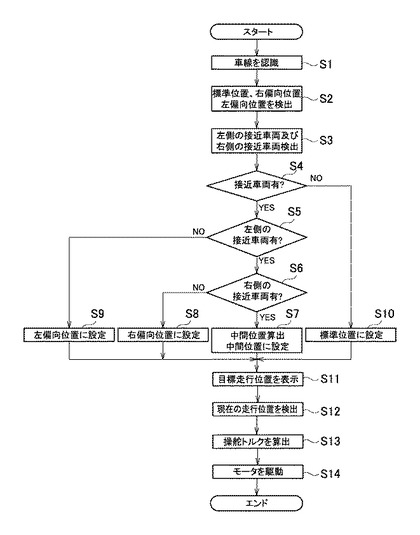
本処理が開始されると、車線認識部17は、道路に表示された区画線を検出し、車両2が走行する車線を認識する(ステップS1)。
【0045】
次に、車線内位置検出部18は、車線認識部17が認識した車線において、標準位置、右偏向位置及び左偏向位置を検出する(ステップS2)。
【0046】
接近車両検出部19は、左側の接近車両及び右側の接近車両を検出する(ステップS3)。
【0047】
次に、目標走行位置設定部22は、接近車両が検出されたか否かを判定する(ステップS4)。
【0048】
接近車両が検出されたと判定したとき(ステップS4:YES)、目標走行位置設定部22は、左側の接近車両が検出されたか否かを判定する(ステップS5)。
【0049】
左側の接近車両が検出されたと判定したとき(ステップS5:YES)、目標走行位置設定部23は、右側の接近車両が検出されたか否かを判定する(ステップS6)。
【0050】
右側の接近車両が検出されたと判定したとき(ステップS6:YES)、目標走行位置設定部22は、左側の接近車両と右側の接近車両との中間位置を算出し、算出した中間位置に目標走行位置を設定する(ステップS7)。
【0051】
右側の接近車両が検出されないと判定したとき(ステップS6:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した右偏向位置に目標走行位置を設定する(ステップS8)。
【0052】
左側の接近車両が検出されないと判定したとき(ステップS5:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した左偏向位置に目標走行位置を設定する(ステップS9)。
【0053】
接近車両が検出されないと判定したとき(ステップS4:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した標準位置に目標走行位置を設定する(ステップS10)。
【0054】
目標走行位置が設定されると、表示制御部23は、目標走行位置設定部22が設定した目標走行位置を表示部27に出力して表示させる(ステップS11)。
【0055】
現走行位置検出部24は、車両2の現在の走行位置を検出する(ステップS12)。
【0056】
トルク算出部25は、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部24が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、モータ9に発生させる操舵トルクを算出する(ステップS13)。
【0057】
操舵制御部26は、トルク算出部25が算出した操舵トルクをモータ9に発生させて(ステップS14)、本処理を終了する。
【0058】
上記のように構成された操舵制御システム1では、接近車両の有無に応じて目標走行位置が設定され、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9が駆動される。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
【0059】
このように、本実施形態の操舵制御システム1によれば、車両2から接近車両までの車線の幅方向に沿った距離を可能な限り保持する位置で車両2を走行させることができる。従って、走行中の周囲の状況に応じた好適な位置で車両2を走行させることができ、他車両との接触の回避を容易にし、走行の安全性を向上させることができる。
【0060】
また、接近車両が車両2の一方の側方のみに検出された場合に目標走行位置として設定される右偏向位置及び左偏向位置は車線幅に応じて設定されるので、目標走行位置を設定するための演算等の準備処理を簡素化することができる。
【0061】
また、接近車両が車両2の両方の側方に検出された場合に目標走行位置として設定される位置は両側の接近車両の中間位置であるので、両側の接近車両との間の距離を可能な限り保持することができる位置で車両2を走行させることができる。
【0062】
なお、CPU16が実行する目標走行位置設定処理は、例えば、目標走行位置を設定して運転者に報知するのみの目標走行位置設定装置など、目標走行位置を設定する処理を実行する他のシステムや装置に適用してもよい。
【0063】
また、本実施形態の操舵制御システムは、ステアリングホイールと操舵輪とが機械的に分離された操舵機構を有する車両に搭載されてもよい。この場合、ステアリングホイールに連結された駆動軸にトルクを付与するモータと、操舵輪に連結された駆動軸にトルクを付与するモータとに発生させるトルクをそれぞれ算出し、算出された各トルクを各モータに発生させる。
【0064】
また、ステアリングシャフト4に操舵トルクを付与する手段は、電気エネルギーによって駆動されるアクチュエータであれば、モータに限定されない。
【0065】
また、カメラ12の設置場所は、車両2の前方の動画像を撮像できる場所であれば、上記に限定されない。
【0066】
また、車線の認識方法や車両2の現在の走行位置の検出方法は、上記に限定されず、レーダを用いるような他の方法であってもよい。
【0067】
また、接近車両の検出方法は、上記に限定されず、カメラによって動画像を撮像し、撮像画像によって検出するような他の方法であってもよい。
【0068】
また、目標走行位置の設定方法は、上記に限定されない。例えば、左側の接近車両及び右側の接近車両がともに検出された場合に標準位置に設定してもよく、左側の接近車両及び右側の接近車両の一方が検出された場合に左側距離及び右側距離に基づいて偏向位置を算出し、算出した偏向位置に設定してもよい。
【0069】
また、運転者に目標走行位置を報知する手段は、上記に限定されず、音声等他の手段であってもよい。
【0070】
上記実施形態は、本発明の一例であり、本発明を逸脱しない範囲において変更可能である。
【産業上の利用可能性】
【0071】
本発明は、目的走行位置を設定する装置に有効である。
【符号の説明】
【0072】
1:操舵制御システム
2:車両(自車両)
4:ステアリングシャフト(操舵軸)
9:モータ(トルク発生手段)
11:操舵角センサ(操舵角検出手段)
12:カメラ(車線認識手段、現走行位置検出手段)
13:クリアランスソナー(左側接近車両検出手段、右側接近車両検出手段)
14:コントローラ
15:記憶部
16:CPU
17:車線認識部(車線認識手段)
18:車線内位置検出部(目標走行位置設定手段)
19:接近車両検出部(左側接近車両検出手段、右側接近車両検出手段)
22:目標走行位置設定部(目標走行位置設定手段)
23:表示制御部(報知手段)
24:現走行位置検出部(現走行位置検出手段)
25:トルク算出部(制御手段)
26:操舵制御部(制御手段)
27:表示部(報知手段)
【技術分野】
【0001】
本発明は、目的走行位置設定装置及び操舵制御システムに関する。
【背景技術】
【0002】
特開2003−26026号公報には、車線内に目標車線内位置を設定し、設定した目標車線内位置を車両が走行するように操舵アクチュエータを制御して、車両の車線内走行を維持する自動操舵装置が記載されている。目標車線内位置は、自動操舵制御の開始時の車両の車線の幅方向の位置に設定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−26026号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の装置では、目標走行位置は、操舵制御が終了するまで開始当初の設定位置に維持される。しかし、操舵制御の開始時に目標走行位置を車線内の好適な位置に設定した場合であっても、隣接車線を他車両が並走する場合などのように走行中に周囲の状況が変化すると、当初の設定位置が必ずしも好適な目標走行位置とはならない可能性が生じる。
【0005】
そこで、本発明は、走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく、本発明の第1の態様の目的走行位置設定装置は、車線認識手段と目標走行位置設定手段と左側接近車両検出手段と右側接近車両検出手段とを備える。車線認識手段は、自車両が走行する前方の車線を認識する。目標走行位置設定手段は、自車両の目標走行位置を車線認識手段が認識した車線内に設定する。左側接近車両検出手段は、自車両の左側を自車両と同方向に走行する他車両のうち自車両の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する。右側接近車両検出手段は、自車両の右側を自車両と同方向に走行する他車両のうち自車両の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する。この場合、目標走行位置設定手段は、左側接近車両検出手段と右側接近車両検出手段とがともに接近車両を検出しない場合、車線の幅方向における所定の標準位置に目標走行位置を設定し、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出しない場合、標準位置よりも右側の右偏向位置に目標走行位置を設定し、右側接近車両検出手段が右側の接近車両を検出し、且つ左側接近車両検出手段が左側の接近車両を検出しない場合、標準位置よりも左側の左偏向位置に目標走行位置を設定する。
【0007】
上記構成では、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向における所定の標準位置に目標走行位置が設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側に目標走行位置が設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側に目標走行位置が設定される。左側の接近車両とは、自車両の左側を自車両と同方向に走行する他車両のうち所定の左範囲内に進入する車両であり、右側の接近車両とは、自車両の右側を自車両と同方向に走行する他車両のうち所定の右範囲内に進入する車両である。
【0008】
このため、他車両が自車両からある程度離間して走行している場合には、所定の標準位置を適切に設定することによって、車線の幅方向の中央のように自車両及び他車両が安全に走行することができる位置に目標走行位置を設定することができる。また、自車両が走行する車線の左側の隣接車線を自車両と並行して走行する左側方車両が自車両の前方に進路を変更するために自車両の左側に接近してくるときのように、他車両が自車両の左側又は右側に接近してくる場合や、左側方車両が隣接車線の右端を走行しているときのように、他車両が自車両の左側又は右側に接近する位置で走行している場合には、標準位置よりも右側又は左側の他車両の接近を回避する位置に目標走行位置を設定することができる。従って、走行中の周囲の状況の変化に応じて、他車両との接触の回避が容易であり安全性の高い位置に目標走行位置を設定することができる。
【0009】
また、本発明の第2の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、左側接近車両検出手段は、自車両から左側の接近車両までの車線の幅方向に沿った左側距離を検出し、右側接近車両検出手段は、自車両から右側の接近車両までの車線の幅方向に沿った右側距離を検出し、目標走行位置設定手段は、左側接近車両検出手段が検出した左側距離に基づいて右偏向位置を設定し、右側接近車両検出手段が検出した右側距離に基づいて左偏向位置を設定する。
【0010】
上記構成では、左側の接近車両のみが検出された場合には、自車両から左側の接近車両までの車線の幅方向に沿った左側距離に基づいて目標走行位置が設定され、右側の接近車両のみが検出された場合には、自車両から右側の接近車両までの車線の幅方向に沿った右側距離に基づいて目標走行位置が設定される。このため、左側距離又は右側距離を確実に保持することができる位置に目標走行位置を設定することができる。
【0011】
また、本発明の第3の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、目標走行位置設定手段は、標準位置から車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に右偏向位置を設定し、標準位置から車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に左偏向位置を設定する。
【0012】
上記構成では、目標走行位置は、左側の接近車両のみが検出された場合には、標準位置から車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に設定され、右側の接近車両のみが検出された場合には、標準位置から車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に設定される。第1の所定距離及び第2の所定距離は、車幅等に基づいて予め設定された一定の値であってもよく、予め設定された一定の割合と車線幅等とに基づいて設定されるような変動する値であってもよい。このため、自車両から接近車両までの距離の検出や各種演算など目標走行位置を設定するための準備処理を簡素化して、周囲の状況に応じた好適な位置に目標走行位置を設定することができる。
【0013】
また、本発明の第4の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、左側接近車両検出手段は、自車両から左側の接近車両までの車線の幅方向に沿った左側距離を検出し、右側接近車両検出手段は、自車両から右側の接近車両までの車線の幅方向に沿った右側距離を検出し、目標走行位置設定手段は、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出した場合、左側接近車両検出手段が検出した左側距離と右側接近車両検出手段が検出した右側距離とに基づいて目標走行位置を設定する。
【0014】
上記構成では、左側の接近車両及び右側の接近車両がともに検出された場合には、左側距離と右側距離とに基づいて目標走行位置が設定される。このため、例えば左側の接近車両と右側の接近車両との中間位置のように、左側距離及び右側距離を可能な限り保持することができる位置に目標走行位置を設定することができる。
【0015】
また、本発明の第5の態様の目的走行位置設定装置は、上記第1の態様の目的走行位置設定装置であって、目標走行位置設定手段は、左側接近車両検出手段が左側の接近車両を検出し、且つ右側接近車両検出手段が右側の接近車両を検出した場合、標準位置に目標走行位置を設定する。
【0016】
上記構成では、左側の接近車両及び右側の接近車両がともに検出された場合には、標準位置に目標走行位置が設定される。このため、目標走行位置を設定するための準備処理を簡素化して、周囲の状況に応じた好適な位置に目標走行位置を設定することができる。
【0017】
また、本発明の第6の態様の目的走行位置設定装置は、上記第1〜第5の態様の何れかの目的走行位置設定装置であって、目標走行位置設定手段が設定した目標走行位置を運転者に報知する報知手段を備える。
【0018】
上記構成では、設定された目標走行位置が運転者に報知される。このため、運転者が目標走行位置を確実に認識することができる。
【0019】
また、本発明の操舵制御システムは、上記第1〜第6の態様の何れかの目標走行位置設定装置と現走行位置検出手段とトルク発生手段と操舵角検出手段と制御手段とを備える。現走行位置検出手段は、車線認識手段が認識した車線の幅方向における自車両の現在の走行位置を検出する。トルク発生手段は、自車両の操舵軸にトルクを付与する。操舵角検出手段は、自車両の操舵角を逐次検出する。制御手段は、目標走行位置設定手段が設定した目標走行位置と現走行位置検出手段が検出した現在の走行位置と操舵角検出手段が検出した操舵角とを用いて、現在の走行位置から目標走行位置へ自車両を走行させるために必要な操舵トルク算出し、算出した操舵トルクをトルク発生手段に発生させる。
【0020】
上記構成では、自車両が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクが自車両の操舵軸に付与される。このため、走行中の周囲の状況に応じた好適な位置で自車両を走行させることができ、他車両との接触の回避を容易にし、走行の安全性を向上させることができる。
【発明の効果】
【0021】
本発明によれば、走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定することができる。
【図面の簡単な説明】
【0022】
【図1】一実施形態の操舵制御システムの構成図である。
【図2】コントローラが実行する処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、本発明の一実施形態の操舵制御システム1について、図面を参照して説明する。図1は、一実施形態の操舵制御システムの構成図である。図2は、コントローラが実行する処理を示すフローチャートである。なお、以下の説明において、左右方向は、車両2の進行方向に対する各方向を示す。
【0024】
図1に示すように、本実施形態の操舵制御システム1は、車両に設けられ、目標走行位置を設定し、設定した目標操舵位置を車両が走行するように操舵を制御して、車両の車線内走行を維持するものであり、モータ9と操舵角センサ11とカメラ12とクリアランスソナー13とコントローラ14と表示部27とを備える。本実施形態の操舵制御システム1が設けられる車両(自車両)2は、ステアリングホイール3と操舵輪8とが、ステアリングシャフト4、ステアリングギアボックス5、ラック軸6及びタイロッド7を介して機械的に連結されている。
【0025】
モータ9は、回転軸10を有し、回転軸10の一端がステアリングシャフト4にギア(図示省略)を介して連結されている。モータ9は、コントローラ14によって動作を制御され、所望のトルクを出力してステアリングシャフト4に付与する。すなわち、モータ9は、車両2のステアリングシャフト4にトルクを付与するトルク発生手段として機能する。
【0026】
操舵角センサ11は、ステアリングシャフト4に設けられ、所定時間毎にステアリングシャフト4の操舵角を逐次検出し、検出した操舵角をコントローラ14へ出力する。すなわち、操舵角センサ11は、車両2の操舵角を逐次検出する操舵角検出手段として機能する。
【0027】
カメラ12は、CCD(Charge Coupled Device)センサやCMOS(Complementary Metal Oxide Semiconductor)センサ等の撮像素子を有し、車両2のフロントウインドウパネル(図示省略)の上部の幅方向の略中心に配置されるルームミラー(図示省略)の裏面に設けられる。カメラ12は、車両2の前方の動画像を撮像し、撮像した動画像を構成する静止画像をデジタル変換してコントローラ14に順次出力する。
【0028】
クリアランスソナー13は、車両2の左側部及び右側部にそれぞれ複数設けられる。クリアランスソナー13は、所定時間毎に、車両2の左方、左前方及び左後方、並びに右方、右前方及び右後方に向かって超音波を発信し、他車両等の物体に反射した超音波を受信することによって物体を検知し、検知した検知信号をコントローラ14に出力する。
【0029】
コントローラ14は、記憶部15とCPU(Central Processing Unit)16とを有する。
【0030】
記憶部15は、例えばRAM(Random Access Memory)などの記録媒体によって構成され、CPU16が各種処理を実行するための各種プログラムや各種データが記憶されている。各種プログラムには、CPU16が目標走行位置設定処理を実行するための目標走行位置設定処理プログラムや操舵制御処理を実行するための操舵制御処理実行プログラムが含まれる。各種データには、車両2の車幅等を含む車両情報が含まれる。また、記憶部15は、各種画像や各種情報などが読み書き自在に記憶される記憶領域を有する。
【0031】
CPU16は、目標走行位置設定プログラム及び操舵制御処理実行プログラムを実行することによって、車線認識部17、車線内位置検出部18、現走行位置検出部19、接近車両検出部20、目標走行位置設定部23、表示制御部24、トルク算出部25及び操舵制御部26として機能する。
【0032】
車線認識部17は、カメラ12から入力された静止画像をエッジ処理することによって、道路に表示された区画線を検出し、車両2が走行する車線を認識する。すなわち、カメラ12と車線認識部17とは、車両2が走行する前方の車線を認識する車線認識手段として機能する。
【0033】
車線内位置検出部18は、車線認識部17が認識した車線において、車線の幅方向の中央(標準位置)、右偏向位置及び左偏向位置を検出する。右偏向位置は、標準位置から車線の幅方向に沿って車線幅の所定の割合の長さだけ右側に離間した位置であり、左偏向位置は、標準位置から車線の幅方向に沿って車線幅の所定の割合の長さだけ左側に離間した位置である。所定の割合は、車両が右偏向位置又は左偏向位置を走行した場合に、車両2の右側部又は左側部から区画線までの距離が、隣接する車線を走行する他車両の運転者に危機感を与えない程度に保持可能な値に設定される。
【0034】
接近車両検出部19は、左側接近車両検出部20と右側接近車両検出部21とを有する。左側接近車両検出部20は、車両2の左側部に設けられたクリアランスソナー13から入力された検知信号を用いて、車両2の左側の接近車両を検出する。具体的には、左側接近車両検出部20は、左側部のクリアランスソナー13が検知した物体のうち、所定時間以上継続して検知された物体を検出し、車両2から当該物体までの車線の幅方向に沿った距離(左側距離)を算出する。左側距離を算出した左側接近車両検出部20は、算出した左側距離が閾値以下であるか否かを判定し、閾値以下であると判定したときに、当該物体を左側の接近車両として検出する。すなわち、クリアランスソナー13と左側接近車両検出部20とは、車両2の左側を車両2と同方向に走行する他車両のうち車両2の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する左側接近車両検出手段として機能する。
【0035】
右側接近車両検出部21は、車両2の右側部に設けられたクリアランスソナー13から入力された検知信号を用いて、車両2の右側の接近車両を検出する。具体的には、右側接近車両検出部21は、右側部のクリアランスソナー13が検知した物体のうち、所定時間以上継続して検知された物体を検出し、車両2から当該物体までの車線の幅方向に沿った距離(右側距離)を算出する。右側距離を算出した右側接近車両検出部21は、算出した右側距離が閾値以下であるか否かを判定し、閾値以下であると判定したときに、当該物体を右側の接近車両として検出する。すなわち、クリアランスソナー13と右側接近車両検出部21とは、車両2の右側を車両2と同方向に走行する他車両のうち車両2の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する右側接近車両検出手段として機能する。
【0036】
目標走行位置設定部22は、接近車両検出部19の検出結果に基づいて目標走行位置を設定する。目標走行位置設定部22は、左側接近車両検出部20と右側接近車両検出部21とがともに接近車両を検出しない場合、車線内位置検出部18が検出した標準位置に目標走行位置を設定する。左側接近車両検出部20が左側の接近車両を検出し、且つ右側接近車両検出部21が右側の接近車両を検出しない場合、目標走行位置設定部22は、車線内位置検出部18が検出した右偏向位置に目標走行位置を設定する。右側接近車両検出部21が右側の接近車両を検出し、且つ左側接近車両検出部20が左側の接近車両を検出しない場合、目標走行位置設定部22は、車線内位置検出部18が検出した左偏向位置に目標走行位置を設定する。
【0037】
また、目標走行位置設定部22は、左側接近車両検出部20が左側の接近車両を検出し、且つ右側接近車両検出部21が右側の接近車両を検出した場合、左側接近車両検出部20が算出した左側距離と右側接近車両検出部21が算出した右側距離とを用いて、左側の接近車両と右側の接近車両との中間位置を算出し、算出した中間位置に目標走行位置を設定する。すなわち、車線内位置検出部18と目標走行位置設定部22とは、車両2の目標走行位置を車線認識部17が認識した車線内に設定する目標走行位置設定手段として機能する。
【0038】
表示制御部23は、目標走行位置設定部22が設定した目標走行位置を表示部27に出力する。
【0039】
現走行位置検出部24は、車線認識部17が認識した車線の幅方向における車両2の現在の走行位置を検出する。すなわち、カメラ12と現走行位置検出部24とは、車線の幅方向における車両2の現在の走行位置を検出する現走行位置検出手段として機能する。
【0040】
トルク算出部25は、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部24が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、モータ9に発生させる操舵トルクを算出する。具体的には、トルク算出部25は、現在の走行位置と目標走行位置とを用いて、現在の走行位置から目標走行位置へ車両2を走行させるために必要な必要操舵角を算出する。必要操舵角を算出したトルク算出部25は、操舵角センサ11が所定時間毎に検出した操舵角を用いて、操舵角の変化量を算出し、算出した必要操舵角及び操舵角の変化量と最新の操舵角とを用いて、最新の操舵角から必要操舵角へステアリングシャフト4を回転させるために必要な操舵トルクを算出する。
【0041】
操舵制御部26は、トルク算出部25が算出した操舵トルクをモータ9に発生させる。すなわち、トルク算出部25と操舵制御部26とは、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部19が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、現在の走行位置から目標走行位置へ車両2を走行させるために必要な操舵トルクを算出し、算出した操舵トルクをモータ9に発生させる制御手段として機能する。
【0042】
表示部27は、車両2のインストルメントパネル(図示省略)に設けられ、表示制御部24から入力された目標走行位置を表示する。すなわち、表示制御部23と表示部27とは、目標走行位置設定部23が設定した目標走行位置を運転者に報知する報知手段として機能する。
【0043】
次に、図2を用いて、コントローラ14が実行する処理について説明する。本処理は、操舵制御システム1が作動しているとき、所定時間毎に繰り返して実行される。
【0044】
本処理が開始されると、車線認識部17は、道路に表示された区画線を検出し、車両2が走行する車線を認識する(ステップS1)。
【0045】
次に、車線内位置検出部18は、車線認識部17が認識した車線において、標準位置、右偏向位置及び左偏向位置を検出する(ステップS2)。
【0046】
接近車両検出部19は、左側の接近車両及び右側の接近車両を検出する(ステップS3)。
【0047】
次に、目標走行位置設定部22は、接近車両が検出されたか否かを判定する(ステップS4)。
【0048】
接近車両が検出されたと判定したとき(ステップS4:YES)、目標走行位置設定部22は、左側の接近車両が検出されたか否かを判定する(ステップS5)。
【0049】
左側の接近車両が検出されたと判定したとき(ステップS5:YES)、目標走行位置設定部23は、右側の接近車両が検出されたか否かを判定する(ステップS6)。
【0050】
右側の接近車両が検出されたと判定したとき(ステップS6:YES)、目標走行位置設定部22は、左側の接近車両と右側の接近車両との中間位置を算出し、算出した中間位置に目標走行位置を設定する(ステップS7)。
【0051】
右側の接近車両が検出されないと判定したとき(ステップS6:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した右偏向位置に目標走行位置を設定する(ステップS8)。
【0052】
左側の接近車両が検出されないと判定したとき(ステップS5:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した左偏向位置に目標走行位置を設定する(ステップS9)。
【0053】
接近車両が検出されないと判定したとき(ステップS4:NO)、目標走行位置設定部22は、車線内位置検出部18が検出した標準位置に目標走行位置を設定する(ステップS10)。
【0054】
目標走行位置が設定されると、表示制御部23は、目標走行位置設定部22が設定した目標走行位置を表示部27に出力して表示させる(ステップS11)。
【0055】
現走行位置検出部24は、車両2の現在の走行位置を検出する(ステップS12)。
【0056】
トルク算出部25は、目標走行位置設定部22が設定した目標走行位置と現走行位置検出部24が検出した現在の走行位置と操舵角センサ11が検出した操舵角とを用いて、モータ9に発生させる操舵トルクを算出する(ステップS13)。
【0057】
操舵制御部26は、トルク算出部25が算出した操舵トルクをモータ9に発生させて(ステップS14)、本処理を終了する。
【0058】
上記のように構成された操舵制御システム1では、接近車両の有無に応じて目標走行位置が設定され、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9が駆動される。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
【0059】
このように、本実施形態の操舵制御システム1によれば、車両2から接近車両までの車線の幅方向に沿った距離を可能な限り保持する位置で車両2を走行させることができる。従って、走行中の周囲の状況に応じた好適な位置で車両2を走行させることができ、他車両との接触の回避を容易にし、走行の安全性を向上させることができる。
【0060】
また、接近車両が車両2の一方の側方のみに検出された場合に目標走行位置として設定される右偏向位置及び左偏向位置は車線幅に応じて設定されるので、目標走行位置を設定するための演算等の準備処理を簡素化することができる。
【0061】
また、接近車両が車両2の両方の側方に検出された場合に目標走行位置として設定される位置は両側の接近車両の中間位置であるので、両側の接近車両との間の距離を可能な限り保持することができる位置で車両2を走行させることができる。
【0062】
なお、CPU16が実行する目標走行位置設定処理は、例えば、目標走行位置を設定して運転者に報知するのみの目標走行位置設定装置など、目標走行位置を設定する処理を実行する他のシステムや装置に適用してもよい。
【0063】
また、本実施形態の操舵制御システムは、ステアリングホイールと操舵輪とが機械的に分離された操舵機構を有する車両に搭載されてもよい。この場合、ステアリングホイールに連結された駆動軸にトルクを付与するモータと、操舵輪に連結された駆動軸にトルクを付与するモータとに発生させるトルクをそれぞれ算出し、算出された各トルクを各モータに発生させる。
【0064】
また、ステアリングシャフト4に操舵トルクを付与する手段は、電気エネルギーによって駆動されるアクチュエータであれば、モータに限定されない。
【0065】
また、カメラ12の設置場所は、車両2の前方の動画像を撮像できる場所であれば、上記に限定されない。
【0066】
また、車線の認識方法や車両2の現在の走行位置の検出方法は、上記に限定されず、レーダを用いるような他の方法であってもよい。
【0067】
また、接近車両の検出方法は、上記に限定されず、カメラによって動画像を撮像し、撮像画像によって検出するような他の方法であってもよい。
【0068】
また、目標走行位置の設定方法は、上記に限定されない。例えば、左側の接近車両及び右側の接近車両がともに検出された場合に標準位置に設定してもよく、左側の接近車両及び右側の接近車両の一方が検出された場合に左側距離及び右側距離に基づいて偏向位置を算出し、算出した偏向位置に設定してもよい。
【0069】
また、運転者に目標走行位置を報知する手段は、上記に限定されず、音声等他の手段であってもよい。
【0070】
上記実施形態は、本発明の一例であり、本発明を逸脱しない範囲において変更可能である。
【産業上の利用可能性】
【0071】
本発明は、目的走行位置を設定する装置に有効である。
【符号の説明】
【0072】
1:操舵制御システム
2:車両(自車両)
4:ステアリングシャフト(操舵軸)
9:モータ(トルク発生手段)
11:操舵角センサ(操舵角検出手段)
12:カメラ(車線認識手段、現走行位置検出手段)
13:クリアランスソナー(左側接近車両検出手段、右側接近車両検出手段)
14:コントローラ
15:記憶部
16:CPU
17:車線認識部(車線認識手段)
18:車線内位置検出部(目標走行位置設定手段)
19:接近車両検出部(左側接近車両検出手段、右側接近車両検出手段)
22:目標走行位置設定部(目標走行位置設定手段)
23:表示制御部(報知手段)
24:現走行位置検出部(現走行位置検出手段)
25:トルク算出部(制御手段)
26:操舵制御部(制御手段)
27:表示部(報知手段)
【特許請求の範囲】
【請求項1】
自車両が走行する前方の車線を認識する車線認識手段と、
前記自車両の目標走行位置を前記車線認識手段が認識した車線内に設定する目標走行位置設定手段と、
前記自車両の左側を前記自車両と同方向に走行する他車両のうち前記自車両の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する左側接近車両検出手段と、
前記自車両の右側を前記自車両と同方向に走行する他車両のうち前記自車両の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する右側接近車両検出手段と、を備え、
前記目標走行位置設定手段は、前記左側接近車両検出手段と前記右側接近車両検出手段とがともに前記接近車両を検出しない場合、前記車線の幅方向における所定の標準位置に前記目標走行位置を設定し、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出しない場合、前記標準位置よりも右側の右偏向位置に前記目標走行位置を設定し、前記右側接近車両検出手段が前記右側の接近車両を検出し、且つ前記左側接近車両検出手段が前記左側の接近車両を検出しない場合、前記標準位置よりも左側の左偏向位置に前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項2】
請求項1に記載の目標走行位置設定装置であって、
前記左側接近車両検出手段は、前記自車両から前記左側の接近車両までの前記車線の幅方向に沿った左側距離を検出し、
前記右側接近車両検出手段は、前記自車両から前記右側の接近車両までの前記車線の幅方向に沿った右側距離を検出し、
前記目標走行位置設定手段は、前記左側接近車両検出手段が検出した左側距離に基づいて前記右偏向位置を設定し、前記右側接近車両検出手段が検出した右側距離に基づいて前記左偏向位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項3】
請求項1に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段は、前記標準位置から前記車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に前記右偏向位置を設定し、前記標準位置から前記車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に前記左偏向位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項4】
請求項1に記載の目標走行位置設定装置であって、
前記左側接近車両検出手段は、前記自車両から前記左側の接近車両までの前記車線の幅方向に沿った左側距離を検出し、
前記右側接近車両検出手段は、前記自車両から前記右側の接近車両までの前記車線の幅方向に沿った右側距離を検出し、
前記目標走行位置設定手段は、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出した場合、前記左側接近車両検出手段が検出した左側距離と前記右側接近車両検出手段が検出した右側距離とに基づいて前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項5】
請求項1に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段は、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出した場合、前記標準位置に前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項6】
請求項1〜請求項5の何れか1項に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段が設定した目標走行位置を運転者に報知する報知手段を備える
ことを特徴とする目標走行位置設定装置。
【請求項7】
請求項1〜請求項6の何れか1項に記載の目標走行位置設定装置を備えた操舵制御システムであって、
前記車線認識手段が認識した車線の幅方向における前記自車両の現在の走行位置を検出する現走行位置検出手段と、
前記自車両の操舵軸にトルクを付与するトルク発生手段と、
前記自車両の操舵角を逐次検出する操舵角検出手段と、
前記目標走行位置設定手段が設定した目標走行位置と前記現走行位置検出手段が検出した現在の走行位置と前記操舵角検出手段が検出した操舵角とを用いて、前記現在の走行位置から前記目標走行位置へ前記自車両を走行させるために必要な操舵トルクを算出し、算出した操舵トルクを前記トルク発生手段に発生させる制御手段と、を備えた
ことを特徴とする操舵制御システム。
【請求項1】
自車両が走行する前方の車線を認識する車線認識手段と、
前記自車両の目標走行位置を前記車線認識手段が認識した車線内に設定する目標走行位置設定手段と、
前記自車両の左側を前記自車両と同方向に走行する他車両のうち前記自車両の左側に予め設定された所定の左範囲内に進入する左側の接近車両を検出する左側接近車両検出手段と、
前記自車両の右側を前記自車両と同方向に走行する他車両のうち前記自車両の右側に予め設定された所定の右範囲内に進入する右側の接近車両を検出する右側接近車両検出手段と、を備え、
前記目標走行位置設定手段は、前記左側接近車両検出手段と前記右側接近車両検出手段とがともに前記接近車両を検出しない場合、前記車線の幅方向における所定の標準位置に前記目標走行位置を設定し、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出しない場合、前記標準位置よりも右側の右偏向位置に前記目標走行位置を設定し、前記右側接近車両検出手段が前記右側の接近車両を検出し、且つ前記左側接近車両検出手段が前記左側の接近車両を検出しない場合、前記標準位置よりも左側の左偏向位置に前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項2】
請求項1に記載の目標走行位置設定装置であって、
前記左側接近車両検出手段は、前記自車両から前記左側の接近車両までの前記車線の幅方向に沿った左側距離を検出し、
前記右側接近車両検出手段は、前記自車両から前記右側の接近車両までの前記車線の幅方向に沿った右側距離を検出し、
前記目標走行位置設定手段は、前記左側接近車両検出手段が検出した左側距離に基づいて前記右偏向位置を設定し、前記右側接近車両検出手段が検出した右側距離に基づいて前記左偏向位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項3】
請求項1に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段は、前記標準位置から前記車線の幅方向に沿って第1の所定距離だけ右側に離間した位置に前記右偏向位置を設定し、前記標準位置から前記車線の幅方向に沿って第2の所定距離だけ左側に離間した位置に前記左偏向位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項4】
請求項1に記載の目標走行位置設定装置であって、
前記左側接近車両検出手段は、前記自車両から前記左側の接近車両までの前記車線の幅方向に沿った左側距離を検出し、
前記右側接近車両検出手段は、前記自車両から前記右側の接近車両までの前記車線の幅方向に沿った右側距離を検出し、
前記目標走行位置設定手段は、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出した場合、前記左側接近車両検出手段が検出した左側距離と前記右側接近車両検出手段が検出した右側距離とに基づいて前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項5】
請求項1に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段は、前記左側接近車両検出手段が前記左側の接近車両を検出し、且つ前記右側接近車両検出手段が前記右側の接近車両を検出した場合、前記標準位置に前記目標走行位置を設定する
ことを特徴とする目標走行位置設定装置。
【請求項6】
請求項1〜請求項5の何れか1項に記載の目標走行位置設定装置であって、
前記目標走行位置設定手段が設定した目標走行位置を運転者に報知する報知手段を備える
ことを特徴とする目標走行位置設定装置。
【請求項7】
請求項1〜請求項6の何れか1項に記載の目標走行位置設定装置を備えた操舵制御システムであって、
前記車線認識手段が認識した車線の幅方向における前記自車両の現在の走行位置を検出する現走行位置検出手段と、
前記自車両の操舵軸にトルクを付与するトルク発生手段と、
前記自車両の操舵角を逐次検出する操舵角検出手段と、
前記目標走行位置設定手段が設定した目標走行位置と前記現走行位置検出手段が検出した現在の走行位置と前記操舵角検出手段が検出した操舵角とを用いて、前記現在の走行位置から前記目標走行位置へ前記自車両を走行させるために必要な操舵トルクを算出し、算出した操舵トルクを前記トルク発生手段に発生させる制御手段と、を備えた
ことを特徴とする操舵制御システム。
【図1】


【図2】
【図2】
【公開番号】特開2013−91401(P2013−91401A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234293(P2011−234293)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000000170)いすゞ自動車株式会社 (1,721)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000000170)いすゞ自動車株式会社 (1,721)
【Fターム(参考)】
[ Back to top ]