
直動回転アクチュエータ
【課題】直動方向の位置および回転方向の角度を精度良く検出すること。
【解決手段】モータ部の界磁部へ取り付けられた出力軸と、出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する検出器部と、出力軸を直動方向および回転方向にそれぞれ支持する軸受部とを備えるように直動回転アクチュエータを構成する。そして、モータ部は、出力軸の反負荷側に、検出器部は、出力軸の負荷側に、それぞれ配置されるように直動回転アクチュエータを構成する。
【解決手段】モータ部の界磁部へ取り付けられた出力軸と、出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する検出器部と、出力軸を直動方向および回転方向にそれぞれ支持する軸受部とを備えるように直動回転アクチュエータを構成する。そして、モータ部は、出力軸の反負荷側に、検出器部は、出力軸の負荷側に、それぞれ配置されるように直動回転アクチュエータを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転動作および直動動作を兼ねる直動回転アクチュエータに関する。
【背景技術】
【0002】
従来、回転動作および直動動作を兼ねるアクチュエータである直動回転アクチュエータが知られている。
【0003】
たとえば、かかる直動回転アクチュエータは、回転モータ用およびリニアモータ用の電機子巻線を同心円上に重ね合わせた固定子と、永久磁石などの界磁部を出力軸まわりに取り付けた可動子とを備えており、可動子に対して直接、トルクおよび推力を発生させる。なお、このように、トルクおよび推力を発生する部位は、「モータ部」と呼ばれる。
【0004】
また、上記した直動回転アクチュエータは、固定子に設けられた直動回転検出器と、可動子の出力軸まわりに設けられた直動回転スケールとで、可動子の回転や移動を検出する「検出器部」を備える。
【0005】
そして、上記した「モータ部」を負荷側に、上記した「検出器部」を反負荷側に設けた直動回転アクチュエータが提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−143385号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した直動回転アクチュエータには、直動方向の位置や回転方向の角度の検出精度に向上の余地があるという問題があった。
【0008】
たとえば、上記した直動回転アクチュエータは、「検出器部」と負荷との間に「モータ部」が配置されているので、「検出器部」と負荷との距離が長くなる傾向にある。このため、「モータ部」から発生する熱による出力軸の歪みの影響が、「検出器部」の検出誤差として生じやすくなる。
【0009】
開示の技術は、上記に鑑みてなされたものであって、直動方向の位置および回転方向の角度を精度良く検出することができる直動回転アクチュエータを提供することを目的とする。
【課題を解決するための手段】
【0010】
本願の開示する直動回転アクチュエータは、永久磁石または鉄心歯を有する界磁部、回転方向に回転磁界を発生する第1の電機子巻線および直動方向に進行磁界を発生する第2の電機子巻線を含むモータ部と、前記モータ部の前記界磁部へ取り付けられた出力軸と、前記出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する直動検出器および回転検出器を含む検出器部と、前記出力軸を直動方向および回転方向にそれぞれ支持する直動軸受および回転軸受を含む軸受部とを備え、前記モータ部は、前記出力軸の反負荷側に、前記検出器部は、前記出力軸の負荷側に、それぞれ配置される。
【発明の効果】
【0011】
本願の開示する直動回転アクチュエータの一つの態様によれば、直動方向の位置および回転方向の角度を精度良く検出することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施例1に係る直動回転アクチュエータを側面から見た断面図である。
【図2A】図2Aは、実施例1に係る界磁部の断面図(その1)である。
【図2B】図2Bは、実施例1に係る界磁部の断面図(その2)である。
【図2C】図2Cは、実施例1に係る界磁部の断面図(その3)である。
【図3】図3は、実施例1に係る電機子巻線および永久磁石の配置関係を示す展開図である。
【図4】図4は、実施例2に係る直動回転アクチュエータを側面から見た断面図である。
【図5】図5は、実施例2に係るモータ部を側面から見た断面図である。
【図6A】図6Aは、実施例3に係る界磁部の断面図(その1)である。
【図6B】図6Bは、実施例3に係る界磁部の断面図(その2)である。
【図6C】図6Cは、実施例3に係る界磁部の断面図(その3)である。
【図6D】図6Dは、実施例3に係る界磁部の展開図である。
【図7A】図7Aは、実施例4に係る界磁部の断面図(その1)である。
【図7B】図7Bは、実施例4に係る界磁部の断面図(その2)である。
【図7C】図7Cは、実施例4に係る界磁部の断面図(その3)である。
【図7D】図7Dは、実施例4に係る界磁部の展開図である。
【図8A】図8Aは、実施例5に係る界磁部の断面図(その1)である。
【図8B】図8Bは、実施例5に係る界磁部の断面図(その2)である。
【図8C】図8Cは、実施例5に係る界磁部の断面図(その3)である。
【図8D】図8Dは、実施例5に係る界磁部の展開図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本願の開示する直動回転アクチュエータの実施例を詳細に説明する。なお、以下に示す実施例における例示で本発明が限定されるものではない。
【実施例1】
【0014】
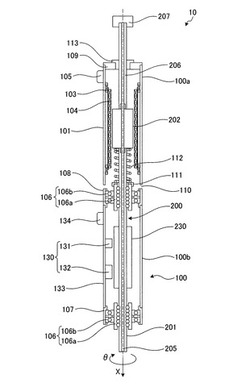
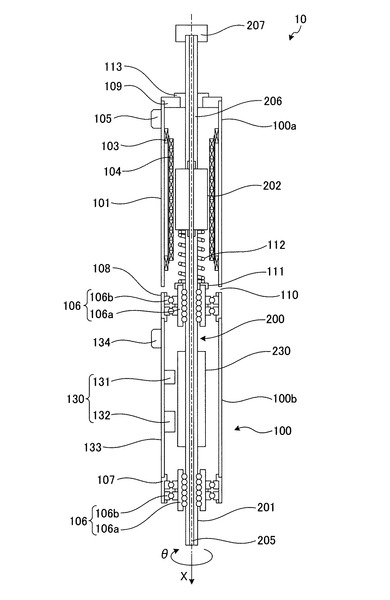
まず、実施例1に係る直動回転アクチュエータについて説明する。図1は、実施例1に係る直動回転アクチュエータ10を側面から見た断面図である。なお、直動回転アクチュエータ10は、図1に示すX軸の正側が鉛直方向の下向きとなるように設置される。以下では、まず、固定子100の構成について説明する。
【0015】
図1に示すように、固定子100のモータ部100aは反負荷側に、固定子100の検出器部100bは負荷側に、それぞれ配置される。なお、図1に示した場合、負荷側は、図1に示すX方向(図1の直線矢印参照)の正方向であり、反負荷側は、X方向の負方向である。なお、以下、単に「X方向」と記載する場合には、正方向および負方向を含むものとする。また、「X方向」は、直動回転アクチュエータ10の「直動方向」に対応する。
【0016】
反負荷側に設けられるモータ部100aは、電機子コアを兼ねた円筒状のモータフレーム101と、θ電機子巻線103と、X電機子巻線104とを同心円上に備える。また、モータフレーム101は、θ電機子巻線103およびX電機子巻線104に対して外部から電力を供給するモータ端子105を備える。
【0017】
モータフレーム101は、反負荷側にエンドブラケット109を備える。そして、エンドブラケット109は、すべり軸受であるエンドブッシュ113を備える。
【0018】
負荷側に設けられる検出器部100bは、検出器フレーム133と、直動回転検出器130とを備える。そして、直動回転検出器130は、回転検出器131と、直動検出器132とを備える。また、検出器フレーム133は、直動回転検出器130に対して外部から電力を供給するとともに、角度θおよび位置Xに関する検出信号を出力する検出器端子134を備える。
【0019】
検出器フレーム133は、負荷側に負荷側ブラケット107を、反負荷側に反負荷側ブラケット108を備える。また、負荷側ブラケット107および反負荷側ブラケット108は、1個のボールスプライン106aと2個のベアリング106bとを含んだθX軸受部106を、それぞれ備える。
【0020】
なお、モータ部100aと、検出器部100bの反負荷側ブラケット108との間には、空隙110が設けられており、モータ部100aおよび反負荷側ブラケット108は、固定ベース(図示せず)にそれぞれ支持される。
【0021】
次に、可動子200の構成について説明する。可動子200は、出力軸201と、界磁部202と、反負荷側軸206とを備える。出力軸201は、非磁性体(たとえば、ステンレス鋼製)で構成される。
【0022】
ここで、出力軸201は、負荷側および反負荷側の2箇所に設けられたボールスプライン106aによって、X方向に移動可能に支持される。また、出力軸201およびボールスプライン106aは、ベアリング106bによって、θ方向(図1の弧状矢印参照)の正方向および負方向に回転可能に支持される。なお、以下、単に「θ方向」と記載する場合には、正方向および負方向を含むものとする。そして、「θ方向」は、直動回転アクチュエータ10の「回転方向」に対応する。
【0023】
このように、出力軸201は、固定子100に対し、θ方向およびX方向へ移動可能である。ここで、出力軸201の先端には負荷(図示せず)が存在するので、出力軸201は、かかる負荷をθ方向およびX方向に自在に移動させることができる。そして、出力軸201は、円筒状に形成された直動回転スケール230を備える。
【0024】
ここで、出力軸201、界磁部202および反負荷側軸206には、負荷側から反負荷側まで貫通した中空穴205が設けられる。なお、出力軸201と界磁部202との密着面、界磁部202と反負荷側軸206との密着面には、それぞれ、密封部品であるOリング(図示せず)が、設けられる。
【0025】
また、可動子200の反負荷側には、継ぎ手207が可動子200と回転自在に設けられる。そして、反負荷側ブラケット108のボールスプライン106aにはプレート111が設けられ、このプレート111は、可動子200とともに回転動作を行う。
【0026】
なお、プレート111と界磁部202との間には、可動子200の質量および負荷の質量の和と釣り合うバネ張力を有する弾性バネ112が設けられる。
【0027】
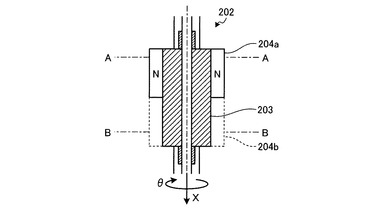
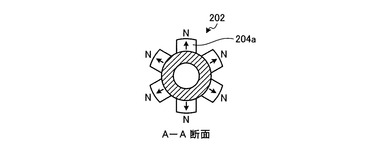
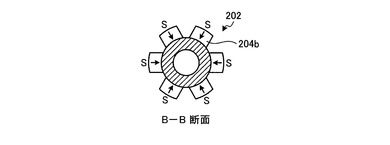
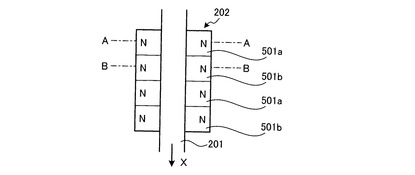
次に、界磁部202の構成について図2A、図2Bおよび図2Cを用いて説明する。図2A〜Cは、それぞれ、実施例1に係る界磁部202の断面図(その1〜その3)である。なお、図2Aには界磁部202を側面から見た断面図を、図2Bには図2Aに示したA−A線における断面図を、図2Cには図2Aに示したB−B線における断面図を、それぞれ示す。
【0028】
また、図2B〜図2Cに示す矢印(→)は、永久磁石の磁化方向をあらわしており、極性は、「S→N」である。
【0029】
図2Aに示すように、界磁部202は、円筒状の界磁ヨーク203の外周に、複数のブロック状の永久磁石(以下、「ブロック磁石」と記載する)である、ブロック磁石204aおよびブロック磁石204bを備える。
【0030】
また、図2Bに示すように、ブロック磁石204aは、外周側がN極に、内周側がS極に、それぞれ磁化される。また、図2Cに示すように、ブロック磁石204bは、ブロック磁石204aとは逆向きに磁化される。
【0031】
そして、ブロック磁石204aと、ブロック磁石204bとは、外周部の凸部が互い違いになるように(図2B〜図2Cに示した場合には、出力軸201(図1参照)まわりに30度ずらした状態)で配置される。なお、ブロック磁石204aおよびブロック磁石204bは、所定の空隙を介してX電機子104(図1参照)と対向する。
【0032】
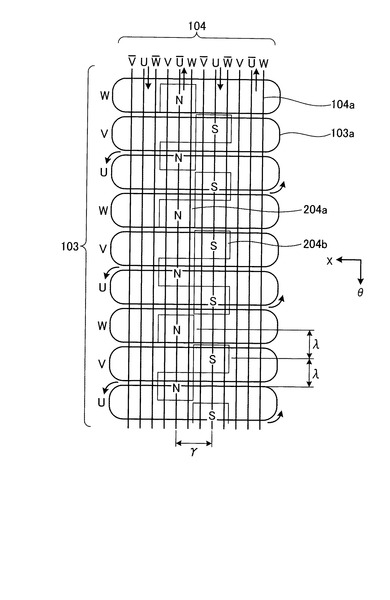
次に、X電機子巻線104および永久磁石(ブロック磁石204aおよびブロック磁石204b)の配置関係について、図3を用いて説明する。図3は、実施例1に係るX電機子巻線104および永久磁石の配置関係を示す展開図である。
【0033】
ブロック磁石204aおよびブロック磁石204bは、それぞれ6個で1つのグループをなす。ブロック磁石204aは、θ方向に2λ(λはθ方向極ピッチ=電気角180度)ごとに配置され、同じくブロック磁石204bもθ方向に2λごとに配置される。
【0034】
さらに、ブロック磁石204aおよびブロック磁石204bは、θ方向にλ、X方向にγ(γはX方向極ピッチ=電気角180度)ずらして配置される。したがって、界磁の磁極数は、θ方向が12極、X方向が2極となる。
【0035】
θ電機子巻線103およびX電機子巻線104は、ブロック磁石204aおよびブロック磁石204bと所定の空隙を介して、図3に模式的に示した配置をとる。θ電機子巻線103は、コイルエンド部が円弧状の形をした集中巻きのコイル(以下、「俵形コイル103a」と記載する)を、U相、V相およびW相についてそれぞれ3個ずつ、計12個含む。
【0036】
ここで、俵形コイル103aがθ方向に配置される間隔は、λ×4/3(電気角240度)である。そして、同相同士の俵形コイル103aの間隔は、電気角720度であるので、3個の同相の俵形コイル103aは、電流の向きが3個とも同じ向きとなるように結線される。
【0037】
一方、X電機子巻線104は、円筒状に集中巻きされたリング形コイル104aを、U相、V相およびW相についてそれぞれ4個ずつ、計12個含む。リング形コイル104aがX方向に配置される間隔は、γ/3(電気角60度)であり、X電機子巻線104のX方向全体の長さは4γ(=γ/3×12個)である。
【0038】
同相同士のリング形コイル104aの間隔はγ(電気角180度)であるので、4個の同相のリング形コイル104aは、電流の向きが、正、逆、正、逆となるように結線される。
【0039】
このように構成された直動回転アクチュエータ10は、θ電機子巻線103へ電流を流すことによって、ブロック磁石204aおよびブロック磁石204bが作る磁界との作用で可動子200にトルクを発生させる。また、X電機子巻線104へ電流を流すことによって、ブロック磁石204aおよびブロック磁石204bが作る磁界との作用で可動子200に推力を発生させる。
【0040】
なお、図3には、θ電機子巻線103およびX電機子巻線104にそれぞれU相が最大となる位相で電流を流した場合を示しており、この場合、図示した矢印方向に電流が流れることによってローレンツ力が発生する。そして、可動子200には、θ+方向(θ方向の正方向)にトルクが、X+方向(X方向の正方向)に推力が、それぞれ発生する。
【0041】
このように、直動回転アクチュエータ10は、直接、可動子200に対してトルクおよび推力を発生させ、回転動作および直動動作を行う。
【0042】
ところで、検出器部100b(図1参照)は、直動方向に凸凹形状を有する磁性体と、回転方向に凸凹形状を有する磁性体とを含んだ直動回転スケール230を、可動子200側に備える。また、検出器部100bは、直動方向および回転方向それぞれの励磁巻線および検出巻線が対向するように含んだ直動回転検出器130を、固定子100側に備える。
【0043】
すなわち、検出器部100bは、上記した直動回転スケール230および直動回転検出器130の組み合わせからなる直動回転レゾルバによって、直動方向の位置および回転方向の角度を検出する。
【0044】
なお、複数個の検出用磁石を可動子200に設けるとともに、3個のホール素子を可動子200と対向する側の固定子100に設けた検出機部100bを構成し、直動方向の位置および回転方向の角度を検出することとしてもよい。
【0045】
このように、実施例1に係る直動回転アクチュエータ10は、負荷側に検出器部100bを配置し、反負荷側にモータ部100aを配置するとともに、モータ部100aの反負荷側にエンドブッシュ113を配置する。
【0046】
すなわち、負荷側に検出器部100bを設けたので、負荷と検出器部100bとの距離を短くすることができる。したがって、負荷に関する直動方向の位置および回転方向の位置を、負荷の近くで検出することができる。
【0047】
ここで、θ電機子巻線103やX電機子巻線104にそれぞれ電流を流すと、モータ部100aには熱が発生し、発生した熱によって出力軸201は熱膨張する。しかしながら、上記したように、負荷と検出器部100bとの距離を短くすると、検出器部100bは、出力軸201における直動方向および回転方向の熱変形の影響を受けにくい。
【0048】
したがって、出力軸201における直動方向の位置誤差および回転方向の位置誤差を低減することができるので、検出器部100bは、直動方向の位置および回転方向の位置を、精密に検出することが可能となる。
【0049】
また、実施例1に係る直動回転アクチュエータ10は、θX軸受部106を各1個のボールスプライン106aと、各2個のベアリング106bとで構成するとともに、θX軸受部106を検出器部100bの両側に配置する。
【0050】
このように、θX軸受部106を検出器部100bの両側に配置すると、検出器部100bにおける、出力軸201のがたや偏心を低減することができ、出力軸201の真直度と回転振れの精度を向上することができる。
【0051】
そして、出力軸201の真直度と回転振れの精度の向上によって、出力軸201に配置された直動回転スケール230の真直度と回転振れの精度を向上することができるので、検出器部100bは、直動方向の位置と回転方向の角度を精度良く検出することができる。
【0052】
また、直動回転アクチュエータ10は、モータ部100aの反負荷側にエンドブッシュ113を配置したので、界磁部202のがたや偏心を低減することができ、ひいては、出力軸201のがたや偏心を低減することができる。したがって、出力軸201の真直度および回転振れの精度を向上することができる。
【0053】
また、直動回転アクチュエータ10は、モータ部100aと検出器部100bとの間に空隙110を設ける。このように、モータ部100aと、反負荷側ブラケット108が配置された検出器部100bとの間に空隙110を設けると、モータ部100aから発生した熱を、検出器部100bへ伝導しにくくすることができる。したがって、温度上昇による検出器部100bの検出誤差を低減することができる。
【0054】
また、直動回転アクチュエータ10は、直動回転スケール230が配置された出力軸201と界磁部202とを分割した可動子200を備える。このようにすることで、出力軸201の長さを短くすることができ、出力軸201の真直度と回転振れの精度を向上することができる。ここで、出力軸201は精密に加工されたボールスプライン軸にて構成されるので、出力軸201の長さを短くすると、出力軸201を安価にすることができる。
【0055】
また、界磁部202の組立では、ブロック磁石204a、204bは磁化されているので取り扱いに注意を要し、出力軸201の組立では、直動回転の検出精度に影響するので直動回転スケール230の取り付けには注意を要する。そこで、上記したように出力軸201と界磁部202とを分割すると、界磁部202の組立と出力軸201の組立とを別工程にて行うことができ、組立作業が容易になる。
【0056】
また、直動回転アクチュエータ10は、非磁性体(たとえば、ステンレス鋼製)の出力軸201を備える。このように、出力軸201を非磁性体で構成すると、出力軸201は磁束を通さない。ここで、仮に、出力軸201を磁性体で構成すると、界磁部202の漏れ磁束による磁力線のなかには、出力軸201を通って検出器部100bへ続く磁力線が存在してしまう。
【0057】
そこで、上記したように、出力軸201を非磁性体で構成すると、出力軸201は磁束を通さないので、検出器部100bへの漏れ磁束を低減することができる。これにより、界磁部202の漏れ磁束に起因する検出器部100bの検出誤差を低減することができる。
【0058】
また、直動回転アクチュエータ10は、中空穴205が設けられた出力軸201を備える。このように、出力軸201に中空穴205を設けると、継ぎ手207を介して中空穴205へ空気(冷媒)を通すことができ、出力軸201を冷却することができる。
【0059】
上記したように、出力軸201は、モータ部100aから発生した熱によって熱膨張するので、このように出力軸201を冷却すると、出力軸201の直動方向の熱変形を減少することができ、特に、出力軸201の直動方向の位置誤差を低減することができる。
【0060】
そして、継ぎ手207を介して中空穴205を真空にすることができるので、出力軸201の負荷側の先端に部品を吸着することができる。また、継ぎ手207を介して中空穴205を圧空にすることもできるので、出力軸201の負荷側の先端から部品を脱着することもできる。
【0061】
また、直動回転アクチュエータ10は、プレート111と界磁部202との間に弾性バネ112を備える。このようにすることで、θ電機子巻線103およびX電機子巻線104に通電していない期間や停電時には、可動子200を、可動子200および負荷の質量と弾性バネ112のバネ張力が釣り合った位置にて停止させることができる。
【0062】
また、可動子200の落下を防ぐことができるので、負荷やその他の外部の物体との衝突による出力軸201の部品精度あるいは位置決め精度の悪化を防ぐことができる。
【0063】
また、ボールスプライン106aにプレート111を配置したことで、界磁部202に合わせてプレート111も回転することができ、界磁部202に合わせて弾性バネ112も回転することができる。
【0064】
ここで、仮に、弾性バネ112が界磁部202に合わせて回転できない構成をとった場合、弾性バネ112がねじられ、ねじれによるトルクがプレート111と界磁部202の間に発生して出力軸201へ伝わるので、回転動作を精密に行うことが容易ではない。
【0065】
そこで、界磁部202に合わせて弾性バネ112も回転するようにすれば、弾性バネ112のねじれによるトルクを出力軸201に伝えないようにすることができる。また、プレート111と界磁部202との間に弾性バネ112を配置したことで、固定子100の内部の空間を利用することができ、アクチュエータを小型化することができる。
【0066】
上述したように、実施例1に係る直動回転アクチュエータは、モータ部を出力軸の反負荷側に、検出器部を出力軸の負荷側に、それぞれ備える。このように、負荷と検出器部との距離を短くすると、出力軸における直動方向および回転方向の熱変形を減少することができ、出力軸における直動方向および回転方向の位置誤差を低減することが可能となる。したがって、直動方向の位置および回転方向の角度を精度良く検出することができる。
【実施例2】
【0067】
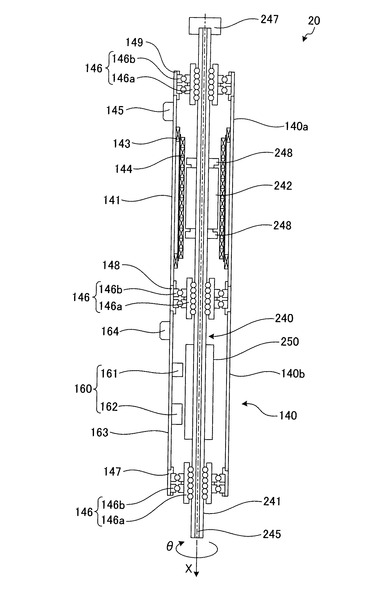
次に、実施例2に係る直動回転アクチュエータについて説明する。図4は、実施例2に係る直動回転アクチュエータ20を側面から見た断面図である。なお、直動回転アクチュエータ20は、図4に示すX軸の正側が鉛直方向の下向きとなるように設置される。以下では、まず、固定子140の構成について説明する。
【0068】
ここで、固定子140のモータ部140aは反負荷側に、固定子140の検出器部140bは負荷側に、それぞれ配置される。なお、図4に示した場合、負荷側は、図4に示すX方向(図4の直線矢印参照)の正方向であり、反負荷側は、X方向の負方向である。また、以下、単に「X方向」と記載する場合には、正方向および負方向を含むものとする。
【0069】
反負荷側に設けられるモータ部140aは、電機子コアを兼ねた円筒状のモータフレーム141と、θ電機子巻線143と、X電機子巻線144とを同心円上に備える。また、モータフレーム141は、θ電機子巻線143およびX電機子巻線144に対して外部から電力を供給するモータ端子145を備える。さらに、モータフレーム141は、反負荷側にエンドブラケット149を備える。
【0070】
負荷側に設けられる検出器部140bは、検出器フレーム163と、直動回転検出器160とを備える。そして、直動回転検出器160は、回転検出器161と、直動検出器162とを備える。また、検出器フレーム163は、直動回転検出器160に対して外部から電力を供給するとともに、角度θおよび位置Xに関する検出信号を出力する検出器端子164を備える。
【0071】
検出器フレーム163は、負荷側に負荷側ブラケット147を、反負荷側に反負荷側ブラケット148を備える。また、負荷側ブラケット147、反負荷側ブラケット148およびエンドブラケット149は、1個のボールスプライン146aと2個のベアリング146bとを含んだθX軸受部146を、それぞれ備える。
【0072】
なお、モータフレーム141は、モータ部140aと検出器部140bとが一体となるように、反負荷側ブラケット148によって支持される。
【0073】
次に、可動子240の構成について説明する。可動子240は、出力軸241と、界磁部242とを備える。また、界磁部242と、出力軸241とは一体化される。
【0074】
ここで、出力軸241は、3箇所に設けられたボールスプライン146aによってX方向に支持される。また、出力軸241およびボールスプライン146aは、ベアリング146bによって、θ方向(図4の弧状矢印参照)の正方向および負方向に回転可能に支持される。なお、以下、単に「θ方向」と記載する場合には、正方向および負方向を含むものとする。
【0075】
このように、出力軸241は、固定子140に対し、θ方向およびX方向へ移動可能である。ここで、出力軸241の先端には負荷(図示せず)が存在するので、出力軸241は、かかる負荷をθ方向およびX方向に自在に移動させることができる。なお、出力軸241は、円筒状に形成された直動回転スケール250を備える。
【0076】
ここで、出力軸241には、負荷側から反負荷側まで貫通した中空穴245が設けられる。また、可動子240の反負荷側には、継ぎ手247が可動子240と回転自在に設けられる。そして、界磁部242の両側には、リング状の磁性体で構成された補極ヨーク248が設けられる。
【0077】
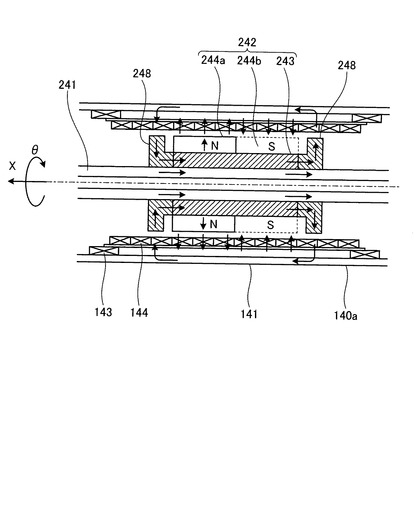
次に、モータ部140aについて図5を用いてさらに詳細に説明する。図5は、実施例2に係るモータ部140aを側面から見た断面図である。ここで、上記したように、モータ部140aは、電機子コアを兼ねた円筒状のモータフレーム141と、θ電機子巻線143と、X電機子巻線144とを同心円上に備える。なお、図5に示す矢印(→)は、磁力線の方向をあらわしており、極性は、「S→N」である。
【0078】
図5に示すように、界磁部242は、円筒状の界磁ヨーク243の外周にブロック磁石244aおよびブロック磁石244bを備える。なお、ブロック磁石244aは、外周側がN極に、内周側がS極に、それぞれ磁化されており、ブロック磁石204bは、ブロック磁石204aとは逆向きに磁化される。また、界磁部242の両側には、リング状の磁性体で構成された補極ヨーク248が設けられる。
【0079】
このように、実施例2に係る直動回転アクチュエータ20は、モータ部140aの反負荷側にθX軸受部146を備える点、および、補極ヨーク248を備える点で、実施例1に係る直動回転アクチュエータ10とは異なる。
【0080】
すなわち、実施例2に係る直動回転アクチュエータ20は、モータ部140aの反負荷側にθX軸受部146を備えるので、実施例1に係る直動回転アクチュエータ10よりも、さらに、界磁部242のがたや偏心を低減することができ、ひいては、出力軸241のがたや偏心をさらに低減することができる。したがって、出力軸241の真直度と回転振れの精度をさらに向上することができる。
【0081】
ここで、仮に、補極ヨーク248を設けない場合、界磁部202の漏れ磁束による磁力線のなかには、モータフレーム141を通って検出器部140bへ続く磁力線や、出力軸201を通って検出器部140bへ続く磁力線が存在してしまう。
【0082】
そこで、上記したように、界磁部242の両側にリング状の補極ヨーク248を設けると、界磁部242の漏れ磁束による磁力線は、モータフレーム141を通り、さらに補極ヨーク248を通って出力軸241を通る磁力線となる。したがって、検出器部140bへの漏れ磁束を低減することができ、界磁部242の漏れ磁束に起因する検出器部140bの検出誤差を低減することができる。
【0083】
なお、補極ヨーク248を、回転方向に凸凹形状を有する花びら状の構成(図示せず)としてもよい。また、補極ヨーク248を、界磁部242の両側に設けるのは、界磁部242の両側の漏れ磁束を負荷側と反負荷側で同じとするためであるが、補極ヨーク248を、界磁部242の片側、たとえば、負荷側のみに設けることとしてもよい。
【0084】
ところで、上述した実施例1および実施例2では、モータ部の可動子側に設けられる界磁部の構成を例示したが(たとえば、図2Aあるいは図5参照)、界磁部の構成は、かかる例示に限られない。そこで、以下では、界磁部の他の構成例である実施例3、実施例4および実施例5について、それぞれ説明する。なお、以下では、実施例1と同様に、界磁部を界磁部202と記載する。
【実施例3】
【0085】
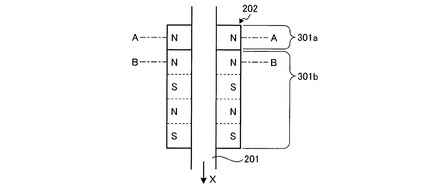
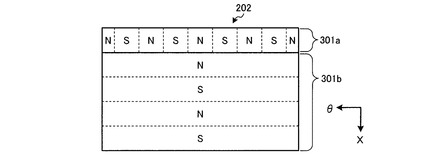
実施例3に係る界磁部202の構成について図6A、図6B、図6Cおよび図6Dを用いて説明する。図6A〜Cは、それぞれ、実施例3に係る界磁部202の断面図(その1〜その3)であり、図6Dは、実施例3に係る界磁部202の展開図である。なお、図6Dには、外周側から見た展開図を示す。
【0086】
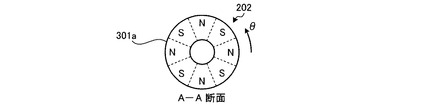
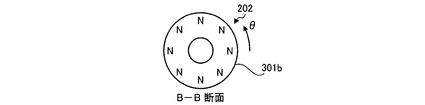
また、図6Aには界磁部202を側面から見た断面図を、図6Bには図6Aに示したA−A線における断面図を、図6Cには図6Aに示したB−B線における断面図を、それぞれ示す。
【0087】
図6Aおよび図6Bに示すように、実施例3に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを交互に繰り返すリング状の永久磁石であるリング磁石301aを備える。また、図6Aおよび図6Cに示すように、実施例3に係る界磁部202は、直動方向(X方向)の外周側について、N極とS極とを交互に繰り返すリング磁石301bを備える。
【0088】
そして、図6Aに示すように、リング磁石301aおよびリング磁石301bは、出力軸201に沿って、同軸上に設けられる。なお、リング磁石301aおよびリング磁石301bは、接着などによってお互いに固定される。
【0089】
なお、リング磁石301aおよびリング磁石301bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石301aおよびリング磁石301bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0090】
図6Bに示すように、リング磁石301aは、図6Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について等間隔で交互に備える。
【0091】
なお、図6Bには、N極数とS極数との合計が8つの場合を例示したが、他の個数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とをθ方向(回転方向)について不等間隔としてもよい。
【0092】
このように、リング磁石301aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石301aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0093】
また、図6Cに示すように、リング磁石301bは、図6Aに示したB−B線における断面(B−B断面)において、外周側がN極に磁化される。そして、図6Dに示すように、リング磁石301bは、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、X方向(直動方向)について等間隔で交互に繰り返す。
【0094】
したがって、X電機子巻線104(図1参照)へ電流を流すと、リング磁石301bが作る磁界との作用で可動子200(図1参照)に推力が発生する。
【0095】
なお、図6Dには、リング磁石301bにおけるN極およびS極の繰り返し数が4つの場合を例示したが、他の数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とが、X方向(直動方向)について不等間隔となるようにリング磁石301bを構成してもよい。
【0096】
このように、実施例3に係る界磁部202によれば、リング磁石301aと、リング磁石301bとを同軸上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【実施例4】
【0097】
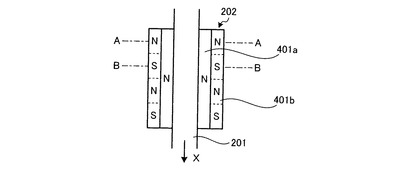
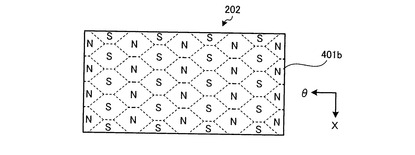
実施例4に係る界磁部202の構成について図7A、図7B、図7Cおよび図7Dを用いて説明する。図7A〜Cは、それぞれ、実施例4に係る界磁部202の断面図(その1〜その3)であり、図7Dは、実施例4に係る界磁部202の展開図である。なお、図7Dには、外周側から見た展開図を示す。
【0098】
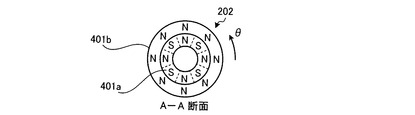
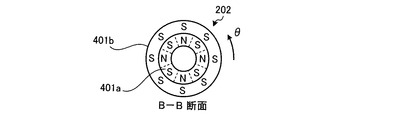
また、図7Aには界磁部202を側面から見た断面図を、図7Bには図7Aに示したA−A線における断面図を、図7Cには図7Aに示したB−B線における断面図を、それぞれ示す。
【0099】
図7Aおよび図7Bに示すように、実施例4に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを交互に繰り返すリング磁石401aを備える。また、図7Aおよび図7Cに示すように、実施例4に係る界磁部202は、直動方向(X方向)の外周側について、N極とS極とを交互に繰り返すリング磁石401bを備える。
【0100】
そして、図7A〜図7Cに示すように、リング磁石401aおよびリング磁石401bは、出力軸201に沿って、同心円上に設けられる。なお、リング磁石401aおよびリング磁石401bは、接着などによってお互いに固定される。また、図7A〜図7Cでは、リング磁石401aを内側に、リング磁石401bを外側に設けた場合を例示したが、両者の位置関係を逆にしてもよい。
【0101】
なお、リング磁石401aおよびリング磁石401bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石401aおよびリング磁石401bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0102】
図7Bに示すように、リング磁石401aは、図7Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について等間隔で交互に備える。
【0103】
また、図7Cに示すように、リング磁石401aのB−B断面は、A−A断面と同様である。すなわち、リング磁石401aは、X方向(直動方向)にわたって、A−A断面と同様に着磁される。
【0104】
なお、図7Bおよび図7Cには、リング磁石401aにおけるN極数とS極数との合計が8つの場合を例示したが、他の個数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とをθ方向(回転方向)について不等間隔としてもよい。
【0105】
このように、リング磁石401aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石401aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。なお、リング磁石401aが作る磁界は、リング磁石401bが作る磁界と合成されるが、この点については、図7Dを用いて後述する。
【0106】
また、図7Bに示すように、リング磁石401bは、図7Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化される。また、図7Cに示すように、リング磁石401bは、図7Aに示したB−B線における断面(B−B断面)において、外周側がS極に磁化される。
【0107】
そして、図7A〜図7Cに示すように、リング磁石401bは、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、X方向(直動方向)について等間隔で交互に繰り返す。
【0108】
したがって、X電機子巻線104へ(図1参照)電流を流すと、リング磁石401bが作る磁界との作用で可動子200(図1参照)に推力が発生する。なお、リング磁石401bが作る磁界は、リング磁石401aが作る磁界と合成されるが、この点については、図7Dを用いて後述する。
【0109】
図7Dに示すように、リング磁石401aが作る磁界と、リング磁石401bが作る磁界とは、ハニカム状に合成される。たとえば、リング磁石401aの外周側がN極、リング磁石401bの外周側がN極の部位は、N極となる。また、リング磁石401aの外周側がS極、リング磁石401bの外周側がS極の部位は、S極となる。
【0110】
そして、リング磁石401aの外周側あるいはリング磁石401bの外周側の一方がN極で他方がS極の部位は、お互いの磁束が弱め合うことで極性が弱くなる(図7Dに示す破線参照)。
【0111】
なお、図7Aおよび図7Dには、リング磁石401bにおけるN極およびS極の繰り返し数が4つの場合を例示したが、他の数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とが、X方向(直動方向)について不等間隔となるようにリング磁石401bを構成してもよい。
【0112】
このように、実施例4に係る界磁部202によれば、リング磁石401aと、リング磁石401bとを同心円上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【実施例5】
【0113】
実施例5に係る界磁部202の構成について図8A、図8B、図8Cおよび図8Dを用いて説明する。図8A〜Cは、それぞれ、実施例5に係る界磁部202の断面図(その1〜その3)であり、図8Dは、実施例5に係る界磁部202の展開図である。なお、図8Dには、外周側から見た展開図を示す。
【0114】
なお、図8Aには界磁部202を側面から見た断面図を、図8Bには図8Aに示したA−A線における断面図を、図8Cには図8Aに示したB−B線における断面図を、それぞれ示す。
【0115】
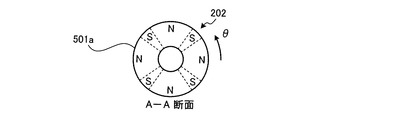
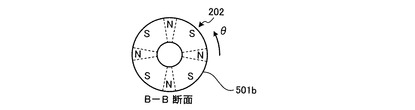
図8Aおよび図8Bに示すように、実施例5に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを不等間隔で交互に繰り返すリング磁石501aを備える。また、図8Aおよび図8Cに示すように、実施例5に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを不等間隔で交互に繰り返すリング磁石501bを備える。
【0116】
そして、回転方向(θ方向)の外周側においてリング磁石501aのN極の中央部と、リング磁石501bのN極の中央部とが一致するように、リング磁石501aおよびリング磁石501bは、出力軸201に沿って、同軸上に設けられる。なお、図8Aには、界磁部202が、それぞれ同数のリング磁石501aおよびリング磁石501bを備える場合を例示したが、両者を異なる個数としてもよい。
【0117】
また、図8Aには、リング磁石501aのX方向(直動方向)の幅と、リング磁石501bのX方向(直動方向)の幅とが等しい場合を例示したが、両者を異なる幅としてもよい。なお、リング磁石501aおよびリング磁石501bは、接着などによってお互いに固定される。
【0118】
なお、リング磁石501aおよびリング磁石501bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石501aおよびリング磁石501bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0119】
図8Bに示すように、リング磁石501aは、図8Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について不等間隔で交互に備える。なお、θ方向(回転方向)におけるN極の幅は、S極の幅よりも広い。
【0120】
このように、リング磁石501aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石501aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0121】
また、図8Cに示すように、リング磁石501bは、図8Aに示したB−B線における断面(B−B断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について不等間隔で交互に備える。なお、θ方向(回転方向)におけるS極の幅は、N極の幅よりも広い。
【0122】
このように、リング磁石501bは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石501aおよびリング磁石501bが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0123】
なお、図8Bおよび図8Cには、リング磁石501aにおけるN極の幅とS極の幅との比が、リング磁石501bにおけるS極の幅とN極の幅との比と等しい場合を例示したが、両者の比を異ならせてもよい。
【0124】
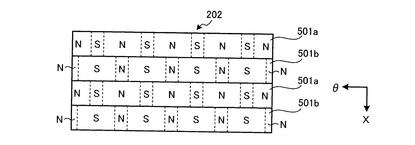
また、図8Dに示すように、リング磁石501aおよびリング磁石501bは、X方向(直動方向)に沿ってN極およびS極を繰り返す部位を有する。したがって、X電機子巻線104(図1参照)へ電流を流すと、リング磁石501aおよびリング磁石501bが作る磁界との作用で可動子200(図1参照)に推力が発生する。
【0125】
なお、可動子200(図1参照)に発生する推力とトルクとの配分は、リング磁石501aおよびリング磁石501bにおけるN極の幅とS極の幅との比を調整することで変更することができる。
【0126】
また、リング磁石501aおよびリング磁石501bにおける各極の幅の比や、θ方向(回転方向)についての相対角は、X方向(直動方向)に沿ってN極およびS極を繰り返す部位を有するものであれば足りる。
【0127】
このように、実施例5に係る界磁部202によれば、リング磁石501aと、リング磁石501bとを同軸上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【0128】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施例に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0129】
10、20 直動回転アクチュエータ
100、140 固定子
100a、140a モータ部
100b、140b 検出器部
101、141 モータフレーム
103、143 θ電機子巻線
103a 俵形コイル
104、144 X電機子巻線
104a リング形コイル
105、145 モータ端子
106、146 θX軸受部
106a、146a ボールスプライン
106b、146b ベアリング
107、147 負荷側ブラケット
108、148 反負荷側ブラケット
109、149 エンドブラケット
110 空隙
111 プレート
112 弾性バネ
113 エンドブッシュ
130、160 直動回転検出器
131、161 回転検出器
132、162 直動検出器
133、163 検出器フレーム
134、164 検出器端子
200、240 可動子
201、241 出力軸
202、242 界磁部
203、243 界磁ヨーク
204a、204b、244a、244b ブロック磁石
205、245 中空穴
206 反負荷側軸
207、247 継ぎ手
230、250 直動回転スケール
248 補極ヨーク
301a、301b、401a、401b、501a、501b リング磁石
【技術分野】
【0001】
本発明は、回転動作および直動動作を兼ねる直動回転アクチュエータに関する。
【背景技術】
【0002】
従来、回転動作および直動動作を兼ねるアクチュエータである直動回転アクチュエータが知られている。
【0003】
たとえば、かかる直動回転アクチュエータは、回転モータ用およびリニアモータ用の電機子巻線を同心円上に重ね合わせた固定子と、永久磁石などの界磁部を出力軸まわりに取り付けた可動子とを備えており、可動子に対して直接、トルクおよび推力を発生させる。なお、このように、トルクおよび推力を発生する部位は、「モータ部」と呼ばれる。
【0004】
また、上記した直動回転アクチュエータは、固定子に設けられた直動回転検出器と、可動子の出力軸まわりに設けられた直動回転スケールとで、可動子の回転や移動を検出する「検出器部」を備える。
【0005】
そして、上記した「モータ部」を負荷側に、上記した「検出器部」を反負荷側に設けた直動回転アクチュエータが提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−143385号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した直動回転アクチュエータには、直動方向の位置や回転方向の角度の検出精度に向上の余地があるという問題があった。
【0008】
たとえば、上記した直動回転アクチュエータは、「検出器部」と負荷との間に「モータ部」が配置されているので、「検出器部」と負荷との距離が長くなる傾向にある。このため、「モータ部」から発生する熱による出力軸の歪みの影響が、「検出器部」の検出誤差として生じやすくなる。
【0009】
開示の技術は、上記に鑑みてなされたものであって、直動方向の位置および回転方向の角度を精度良く検出することができる直動回転アクチュエータを提供することを目的とする。
【課題を解決するための手段】
【0010】
本願の開示する直動回転アクチュエータは、永久磁石または鉄心歯を有する界磁部、回転方向に回転磁界を発生する第1の電機子巻線および直動方向に進行磁界を発生する第2の電機子巻線を含むモータ部と、前記モータ部の前記界磁部へ取り付けられた出力軸と、前記出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する直動検出器および回転検出器を含む検出器部と、前記出力軸を直動方向および回転方向にそれぞれ支持する直動軸受および回転軸受を含む軸受部とを備え、前記モータ部は、前記出力軸の反負荷側に、前記検出器部は、前記出力軸の負荷側に、それぞれ配置される。
【発明の効果】
【0011】
本願の開示する直動回転アクチュエータの一つの態様によれば、直動方向の位置および回転方向の角度を精度良く検出することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施例1に係る直動回転アクチュエータを側面から見た断面図である。
【図2A】図2Aは、実施例1に係る界磁部の断面図(その1)である。
【図2B】図2Bは、実施例1に係る界磁部の断面図(その2)である。
【図2C】図2Cは、実施例1に係る界磁部の断面図(その3)である。
【図3】図3は、実施例1に係る電機子巻線および永久磁石の配置関係を示す展開図である。
【図4】図4は、実施例2に係る直動回転アクチュエータを側面から見た断面図である。
【図5】図5は、実施例2に係るモータ部を側面から見た断面図である。
【図6A】図6Aは、実施例3に係る界磁部の断面図(その1)である。
【図6B】図6Bは、実施例3に係る界磁部の断面図(その2)である。
【図6C】図6Cは、実施例3に係る界磁部の断面図(その3)である。
【図6D】図6Dは、実施例3に係る界磁部の展開図である。
【図7A】図7Aは、実施例4に係る界磁部の断面図(その1)である。
【図7B】図7Bは、実施例4に係る界磁部の断面図(その2)である。
【図7C】図7Cは、実施例4に係る界磁部の断面図(その3)である。
【図7D】図7Dは、実施例4に係る界磁部の展開図である。
【図8A】図8Aは、実施例5に係る界磁部の断面図(その1)である。
【図8B】図8Bは、実施例5に係る界磁部の断面図(その2)である。
【図8C】図8Cは、実施例5に係る界磁部の断面図(その3)である。
【図8D】図8Dは、実施例5に係る界磁部の展開図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本願の開示する直動回転アクチュエータの実施例を詳細に説明する。なお、以下に示す実施例における例示で本発明が限定されるものではない。
【実施例1】
【0014】
まず、実施例1に係る直動回転アクチュエータについて説明する。図1は、実施例1に係る直動回転アクチュエータ10を側面から見た断面図である。なお、直動回転アクチュエータ10は、図1に示すX軸の正側が鉛直方向の下向きとなるように設置される。以下では、まず、固定子100の構成について説明する。
【0015】
図1に示すように、固定子100のモータ部100aは反負荷側に、固定子100の検出器部100bは負荷側に、それぞれ配置される。なお、図1に示した場合、負荷側は、図1に示すX方向(図1の直線矢印参照)の正方向であり、反負荷側は、X方向の負方向である。なお、以下、単に「X方向」と記載する場合には、正方向および負方向を含むものとする。また、「X方向」は、直動回転アクチュエータ10の「直動方向」に対応する。
【0016】
反負荷側に設けられるモータ部100aは、電機子コアを兼ねた円筒状のモータフレーム101と、θ電機子巻線103と、X電機子巻線104とを同心円上に備える。また、モータフレーム101は、θ電機子巻線103およびX電機子巻線104に対して外部から電力を供給するモータ端子105を備える。
【0017】
モータフレーム101は、反負荷側にエンドブラケット109を備える。そして、エンドブラケット109は、すべり軸受であるエンドブッシュ113を備える。
【0018】
負荷側に設けられる検出器部100bは、検出器フレーム133と、直動回転検出器130とを備える。そして、直動回転検出器130は、回転検出器131と、直動検出器132とを備える。また、検出器フレーム133は、直動回転検出器130に対して外部から電力を供給するとともに、角度θおよび位置Xに関する検出信号を出力する検出器端子134を備える。
【0019】
検出器フレーム133は、負荷側に負荷側ブラケット107を、反負荷側に反負荷側ブラケット108を備える。また、負荷側ブラケット107および反負荷側ブラケット108は、1個のボールスプライン106aと2個のベアリング106bとを含んだθX軸受部106を、それぞれ備える。
【0020】
なお、モータ部100aと、検出器部100bの反負荷側ブラケット108との間には、空隙110が設けられており、モータ部100aおよび反負荷側ブラケット108は、固定ベース(図示せず)にそれぞれ支持される。
【0021】
次に、可動子200の構成について説明する。可動子200は、出力軸201と、界磁部202と、反負荷側軸206とを備える。出力軸201は、非磁性体(たとえば、ステンレス鋼製)で構成される。
【0022】
ここで、出力軸201は、負荷側および反負荷側の2箇所に設けられたボールスプライン106aによって、X方向に移動可能に支持される。また、出力軸201およびボールスプライン106aは、ベアリング106bによって、θ方向(図1の弧状矢印参照)の正方向および負方向に回転可能に支持される。なお、以下、単に「θ方向」と記載する場合には、正方向および負方向を含むものとする。そして、「θ方向」は、直動回転アクチュエータ10の「回転方向」に対応する。
【0023】
このように、出力軸201は、固定子100に対し、θ方向およびX方向へ移動可能である。ここで、出力軸201の先端には負荷(図示せず)が存在するので、出力軸201は、かかる負荷をθ方向およびX方向に自在に移動させることができる。そして、出力軸201は、円筒状に形成された直動回転スケール230を備える。
【0024】
ここで、出力軸201、界磁部202および反負荷側軸206には、負荷側から反負荷側まで貫通した中空穴205が設けられる。なお、出力軸201と界磁部202との密着面、界磁部202と反負荷側軸206との密着面には、それぞれ、密封部品であるOリング(図示せず)が、設けられる。
【0025】
また、可動子200の反負荷側には、継ぎ手207が可動子200と回転自在に設けられる。そして、反負荷側ブラケット108のボールスプライン106aにはプレート111が設けられ、このプレート111は、可動子200とともに回転動作を行う。
【0026】
なお、プレート111と界磁部202との間には、可動子200の質量および負荷の質量の和と釣り合うバネ張力を有する弾性バネ112が設けられる。
【0027】
次に、界磁部202の構成について図2A、図2Bおよび図2Cを用いて説明する。図2A〜Cは、それぞれ、実施例1に係る界磁部202の断面図(その1〜その3)である。なお、図2Aには界磁部202を側面から見た断面図を、図2Bには図2Aに示したA−A線における断面図を、図2Cには図2Aに示したB−B線における断面図を、それぞれ示す。
【0028】
また、図2B〜図2Cに示す矢印(→)は、永久磁石の磁化方向をあらわしており、極性は、「S→N」である。
【0029】
図2Aに示すように、界磁部202は、円筒状の界磁ヨーク203の外周に、複数のブロック状の永久磁石(以下、「ブロック磁石」と記載する)である、ブロック磁石204aおよびブロック磁石204bを備える。
【0030】
また、図2Bに示すように、ブロック磁石204aは、外周側がN極に、内周側がS極に、それぞれ磁化される。また、図2Cに示すように、ブロック磁石204bは、ブロック磁石204aとは逆向きに磁化される。
【0031】
そして、ブロック磁石204aと、ブロック磁石204bとは、外周部の凸部が互い違いになるように(図2B〜図2Cに示した場合には、出力軸201(図1参照)まわりに30度ずらした状態)で配置される。なお、ブロック磁石204aおよびブロック磁石204bは、所定の空隙を介してX電機子104(図1参照)と対向する。
【0032】
次に、X電機子巻線104および永久磁石(ブロック磁石204aおよびブロック磁石204b)の配置関係について、図3を用いて説明する。図3は、実施例1に係るX電機子巻線104および永久磁石の配置関係を示す展開図である。
【0033】
ブロック磁石204aおよびブロック磁石204bは、それぞれ6個で1つのグループをなす。ブロック磁石204aは、θ方向に2λ(λはθ方向極ピッチ=電気角180度)ごとに配置され、同じくブロック磁石204bもθ方向に2λごとに配置される。
【0034】
さらに、ブロック磁石204aおよびブロック磁石204bは、θ方向にλ、X方向にγ(γはX方向極ピッチ=電気角180度)ずらして配置される。したがって、界磁の磁極数は、θ方向が12極、X方向が2極となる。
【0035】
θ電機子巻線103およびX電機子巻線104は、ブロック磁石204aおよびブロック磁石204bと所定の空隙を介して、図3に模式的に示した配置をとる。θ電機子巻線103は、コイルエンド部が円弧状の形をした集中巻きのコイル(以下、「俵形コイル103a」と記載する)を、U相、V相およびW相についてそれぞれ3個ずつ、計12個含む。
【0036】
ここで、俵形コイル103aがθ方向に配置される間隔は、λ×4/3(電気角240度)である。そして、同相同士の俵形コイル103aの間隔は、電気角720度であるので、3個の同相の俵形コイル103aは、電流の向きが3個とも同じ向きとなるように結線される。
【0037】
一方、X電機子巻線104は、円筒状に集中巻きされたリング形コイル104aを、U相、V相およびW相についてそれぞれ4個ずつ、計12個含む。リング形コイル104aがX方向に配置される間隔は、γ/3(電気角60度)であり、X電機子巻線104のX方向全体の長さは4γ(=γ/3×12個)である。
【0038】
同相同士のリング形コイル104aの間隔はγ(電気角180度)であるので、4個の同相のリング形コイル104aは、電流の向きが、正、逆、正、逆となるように結線される。
【0039】
このように構成された直動回転アクチュエータ10は、θ電機子巻線103へ電流を流すことによって、ブロック磁石204aおよびブロック磁石204bが作る磁界との作用で可動子200にトルクを発生させる。また、X電機子巻線104へ電流を流すことによって、ブロック磁石204aおよびブロック磁石204bが作る磁界との作用で可動子200に推力を発生させる。
【0040】
なお、図3には、θ電機子巻線103およびX電機子巻線104にそれぞれU相が最大となる位相で電流を流した場合を示しており、この場合、図示した矢印方向に電流が流れることによってローレンツ力が発生する。そして、可動子200には、θ+方向(θ方向の正方向)にトルクが、X+方向(X方向の正方向)に推力が、それぞれ発生する。
【0041】
このように、直動回転アクチュエータ10は、直接、可動子200に対してトルクおよび推力を発生させ、回転動作および直動動作を行う。
【0042】
ところで、検出器部100b(図1参照)は、直動方向に凸凹形状を有する磁性体と、回転方向に凸凹形状を有する磁性体とを含んだ直動回転スケール230を、可動子200側に備える。また、検出器部100bは、直動方向および回転方向それぞれの励磁巻線および検出巻線が対向するように含んだ直動回転検出器130を、固定子100側に備える。
【0043】
すなわち、検出器部100bは、上記した直動回転スケール230および直動回転検出器130の組み合わせからなる直動回転レゾルバによって、直動方向の位置および回転方向の角度を検出する。
【0044】
なお、複数個の検出用磁石を可動子200に設けるとともに、3個のホール素子を可動子200と対向する側の固定子100に設けた検出機部100bを構成し、直動方向の位置および回転方向の角度を検出することとしてもよい。
【0045】
このように、実施例1に係る直動回転アクチュエータ10は、負荷側に検出器部100bを配置し、反負荷側にモータ部100aを配置するとともに、モータ部100aの反負荷側にエンドブッシュ113を配置する。
【0046】
すなわち、負荷側に検出器部100bを設けたので、負荷と検出器部100bとの距離を短くすることができる。したがって、負荷に関する直動方向の位置および回転方向の位置を、負荷の近くで検出することができる。
【0047】
ここで、θ電機子巻線103やX電機子巻線104にそれぞれ電流を流すと、モータ部100aには熱が発生し、発生した熱によって出力軸201は熱膨張する。しかしながら、上記したように、負荷と検出器部100bとの距離を短くすると、検出器部100bは、出力軸201における直動方向および回転方向の熱変形の影響を受けにくい。
【0048】
したがって、出力軸201における直動方向の位置誤差および回転方向の位置誤差を低減することができるので、検出器部100bは、直動方向の位置および回転方向の位置を、精密に検出することが可能となる。
【0049】
また、実施例1に係る直動回転アクチュエータ10は、θX軸受部106を各1個のボールスプライン106aと、各2個のベアリング106bとで構成するとともに、θX軸受部106を検出器部100bの両側に配置する。
【0050】
このように、θX軸受部106を検出器部100bの両側に配置すると、検出器部100bにおける、出力軸201のがたや偏心を低減することができ、出力軸201の真直度と回転振れの精度を向上することができる。
【0051】
そして、出力軸201の真直度と回転振れの精度の向上によって、出力軸201に配置された直動回転スケール230の真直度と回転振れの精度を向上することができるので、検出器部100bは、直動方向の位置と回転方向の角度を精度良く検出することができる。
【0052】
また、直動回転アクチュエータ10は、モータ部100aの反負荷側にエンドブッシュ113を配置したので、界磁部202のがたや偏心を低減することができ、ひいては、出力軸201のがたや偏心を低減することができる。したがって、出力軸201の真直度および回転振れの精度を向上することができる。
【0053】
また、直動回転アクチュエータ10は、モータ部100aと検出器部100bとの間に空隙110を設ける。このように、モータ部100aと、反負荷側ブラケット108が配置された検出器部100bとの間に空隙110を設けると、モータ部100aから発生した熱を、検出器部100bへ伝導しにくくすることができる。したがって、温度上昇による検出器部100bの検出誤差を低減することができる。
【0054】
また、直動回転アクチュエータ10は、直動回転スケール230が配置された出力軸201と界磁部202とを分割した可動子200を備える。このようにすることで、出力軸201の長さを短くすることができ、出力軸201の真直度と回転振れの精度を向上することができる。ここで、出力軸201は精密に加工されたボールスプライン軸にて構成されるので、出力軸201の長さを短くすると、出力軸201を安価にすることができる。
【0055】
また、界磁部202の組立では、ブロック磁石204a、204bは磁化されているので取り扱いに注意を要し、出力軸201の組立では、直動回転の検出精度に影響するので直動回転スケール230の取り付けには注意を要する。そこで、上記したように出力軸201と界磁部202とを分割すると、界磁部202の組立と出力軸201の組立とを別工程にて行うことができ、組立作業が容易になる。
【0056】
また、直動回転アクチュエータ10は、非磁性体(たとえば、ステンレス鋼製)の出力軸201を備える。このように、出力軸201を非磁性体で構成すると、出力軸201は磁束を通さない。ここで、仮に、出力軸201を磁性体で構成すると、界磁部202の漏れ磁束による磁力線のなかには、出力軸201を通って検出器部100bへ続く磁力線が存在してしまう。
【0057】
そこで、上記したように、出力軸201を非磁性体で構成すると、出力軸201は磁束を通さないので、検出器部100bへの漏れ磁束を低減することができる。これにより、界磁部202の漏れ磁束に起因する検出器部100bの検出誤差を低減することができる。
【0058】
また、直動回転アクチュエータ10は、中空穴205が設けられた出力軸201を備える。このように、出力軸201に中空穴205を設けると、継ぎ手207を介して中空穴205へ空気(冷媒)を通すことができ、出力軸201を冷却することができる。
【0059】
上記したように、出力軸201は、モータ部100aから発生した熱によって熱膨張するので、このように出力軸201を冷却すると、出力軸201の直動方向の熱変形を減少することができ、特に、出力軸201の直動方向の位置誤差を低減することができる。
【0060】
そして、継ぎ手207を介して中空穴205を真空にすることができるので、出力軸201の負荷側の先端に部品を吸着することができる。また、継ぎ手207を介して中空穴205を圧空にすることもできるので、出力軸201の負荷側の先端から部品を脱着することもできる。
【0061】
また、直動回転アクチュエータ10は、プレート111と界磁部202との間に弾性バネ112を備える。このようにすることで、θ電機子巻線103およびX電機子巻線104に通電していない期間や停電時には、可動子200を、可動子200および負荷の質量と弾性バネ112のバネ張力が釣り合った位置にて停止させることができる。
【0062】
また、可動子200の落下を防ぐことができるので、負荷やその他の外部の物体との衝突による出力軸201の部品精度あるいは位置決め精度の悪化を防ぐことができる。
【0063】
また、ボールスプライン106aにプレート111を配置したことで、界磁部202に合わせてプレート111も回転することができ、界磁部202に合わせて弾性バネ112も回転することができる。
【0064】
ここで、仮に、弾性バネ112が界磁部202に合わせて回転できない構成をとった場合、弾性バネ112がねじられ、ねじれによるトルクがプレート111と界磁部202の間に発生して出力軸201へ伝わるので、回転動作を精密に行うことが容易ではない。
【0065】
そこで、界磁部202に合わせて弾性バネ112も回転するようにすれば、弾性バネ112のねじれによるトルクを出力軸201に伝えないようにすることができる。また、プレート111と界磁部202との間に弾性バネ112を配置したことで、固定子100の内部の空間を利用することができ、アクチュエータを小型化することができる。
【0066】
上述したように、実施例1に係る直動回転アクチュエータは、モータ部を出力軸の反負荷側に、検出器部を出力軸の負荷側に、それぞれ備える。このように、負荷と検出器部との距離を短くすると、出力軸における直動方向および回転方向の熱変形を減少することができ、出力軸における直動方向および回転方向の位置誤差を低減することが可能となる。したがって、直動方向の位置および回転方向の角度を精度良く検出することができる。
【実施例2】
【0067】
次に、実施例2に係る直動回転アクチュエータについて説明する。図4は、実施例2に係る直動回転アクチュエータ20を側面から見た断面図である。なお、直動回転アクチュエータ20は、図4に示すX軸の正側が鉛直方向の下向きとなるように設置される。以下では、まず、固定子140の構成について説明する。
【0068】
ここで、固定子140のモータ部140aは反負荷側に、固定子140の検出器部140bは負荷側に、それぞれ配置される。なお、図4に示した場合、負荷側は、図4に示すX方向(図4の直線矢印参照)の正方向であり、反負荷側は、X方向の負方向である。また、以下、単に「X方向」と記載する場合には、正方向および負方向を含むものとする。
【0069】
反負荷側に設けられるモータ部140aは、電機子コアを兼ねた円筒状のモータフレーム141と、θ電機子巻線143と、X電機子巻線144とを同心円上に備える。また、モータフレーム141は、θ電機子巻線143およびX電機子巻線144に対して外部から電力を供給するモータ端子145を備える。さらに、モータフレーム141は、反負荷側にエンドブラケット149を備える。
【0070】
負荷側に設けられる検出器部140bは、検出器フレーム163と、直動回転検出器160とを備える。そして、直動回転検出器160は、回転検出器161と、直動検出器162とを備える。また、検出器フレーム163は、直動回転検出器160に対して外部から電力を供給するとともに、角度θおよび位置Xに関する検出信号を出力する検出器端子164を備える。
【0071】
検出器フレーム163は、負荷側に負荷側ブラケット147を、反負荷側に反負荷側ブラケット148を備える。また、負荷側ブラケット147、反負荷側ブラケット148およびエンドブラケット149は、1個のボールスプライン146aと2個のベアリング146bとを含んだθX軸受部146を、それぞれ備える。
【0072】
なお、モータフレーム141は、モータ部140aと検出器部140bとが一体となるように、反負荷側ブラケット148によって支持される。
【0073】
次に、可動子240の構成について説明する。可動子240は、出力軸241と、界磁部242とを備える。また、界磁部242と、出力軸241とは一体化される。
【0074】
ここで、出力軸241は、3箇所に設けられたボールスプライン146aによってX方向に支持される。また、出力軸241およびボールスプライン146aは、ベアリング146bによって、θ方向(図4の弧状矢印参照)の正方向および負方向に回転可能に支持される。なお、以下、単に「θ方向」と記載する場合には、正方向および負方向を含むものとする。
【0075】
このように、出力軸241は、固定子140に対し、θ方向およびX方向へ移動可能である。ここで、出力軸241の先端には負荷(図示せず)が存在するので、出力軸241は、かかる負荷をθ方向およびX方向に自在に移動させることができる。なお、出力軸241は、円筒状に形成された直動回転スケール250を備える。
【0076】
ここで、出力軸241には、負荷側から反負荷側まで貫通した中空穴245が設けられる。また、可動子240の反負荷側には、継ぎ手247が可動子240と回転自在に設けられる。そして、界磁部242の両側には、リング状の磁性体で構成された補極ヨーク248が設けられる。
【0077】
次に、モータ部140aについて図5を用いてさらに詳細に説明する。図5は、実施例2に係るモータ部140aを側面から見た断面図である。ここで、上記したように、モータ部140aは、電機子コアを兼ねた円筒状のモータフレーム141と、θ電機子巻線143と、X電機子巻線144とを同心円上に備える。なお、図5に示す矢印(→)は、磁力線の方向をあらわしており、極性は、「S→N」である。
【0078】
図5に示すように、界磁部242は、円筒状の界磁ヨーク243の外周にブロック磁石244aおよびブロック磁石244bを備える。なお、ブロック磁石244aは、外周側がN極に、内周側がS極に、それぞれ磁化されており、ブロック磁石204bは、ブロック磁石204aとは逆向きに磁化される。また、界磁部242の両側には、リング状の磁性体で構成された補極ヨーク248が設けられる。
【0079】
このように、実施例2に係る直動回転アクチュエータ20は、モータ部140aの反負荷側にθX軸受部146を備える点、および、補極ヨーク248を備える点で、実施例1に係る直動回転アクチュエータ10とは異なる。
【0080】
すなわち、実施例2に係る直動回転アクチュエータ20は、モータ部140aの反負荷側にθX軸受部146を備えるので、実施例1に係る直動回転アクチュエータ10よりも、さらに、界磁部242のがたや偏心を低減することができ、ひいては、出力軸241のがたや偏心をさらに低減することができる。したがって、出力軸241の真直度と回転振れの精度をさらに向上することができる。
【0081】
ここで、仮に、補極ヨーク248を設けない場合、界磁部202の漏れ磁束による磁力線のなかには、モータフレーム141を通って検出器部140bへ続く磁力線や、出力軸201を通って検出器部140bへ続く磁力線が存在してしまう。
【0082】
そこで、上記したように、界磁部242の両側にリング状の補極ヨーク248を設けると、界磁部242の漏れ磁束による磁力線は、モータフレーム141を通り、さらに補極ヨーク248を通って出力軸241を通る磁力線となる。したがって、検出器部140bへの漏れ磁束を低減することができ、界磁部242の漏れ磁束に起因する検出器部140bの検出誤差を低減することができる。
【0083】
なお、補極ヨーク248を、回転方向に凸凹形状を有する花びら状の構成(図示せず)としてもよい。また、補極ヨーク248を、界磁部242の両側に設けるのは、界磁部242の両側の漏れ磁束を負荷側と反負荷側で同じとするためであるが、補極ヨーク248を、界磁部242の片側、たとえば、負荷側のみに設けることとしてもよい。
【0084】
ところで、上述した実施例1および実施例2では、モータ部の可動子側に設けられる界磁部の構成を例示したが(たとえば、図2Aあるいは図5参照)、界磁部の構成は、かかる例示に限られない。そこで、以下では、界磁部の他の構成例である実施例3、実施例4および実施例5について、それぞれ説明する。なお、以下では、実施例1と同様に、界磁部を界磁部202と記載する。
【実施例3】
【0085】
実施例3に係る界磁部202の構成について図6A、図6B、図6Cおよび図6Dを用いて説明する。図6A〜Cは、それぞれ、実施例3に係る界磁部202の断面図(その1〜その3)であり、図6Dは、実施例3に係る界磁部202の展開図である。なお、図6Dには、外周側から見た展開図を示す。
【0086】
また、図6Aには界磁部202を側面から見た断面図を、図6Bには図6Aに示したA−A線における断面図を、図6Cには図6Aに示したB−B線における断面図を、それぞれ示す。
【0087】
図6Aおよび図6Bに示すように、実施例3に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを交互に繰り返すリング状の永久磁石であるリング磁石301aを備える。また、図6Aおよび図6Cに示すように、実施例3に係る界磁部202は、直動方向(X方向)の外周側について、N極とS極とを交互に繰り返すリング磁石301bを備える。
【0088】
そして、図6Aに示すように、リング磁石301aおよびリング磁石301bは、出力軸201に沿って、同軸上に設けられる。なお、リング磁石301aおよびリング磁石301bは、接着などによってお互いに固定される。
【0089】
なお、リング磁石301aおよびリング磁石301bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石301aおよびリング磁石301bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0090】
図6Bに示すように、リング磁石301aは、図6Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について等間隔で交互に備える。
【0091】
なお、図6Bには、N極数とS極数との合計が8つの場合を例示したが、他の個数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とをθ方向(回転方向)について不等間隔としてもよい。
【0092】
このように、リング磁石301aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石301aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0093】
また、図6Cに示すように、リング磁石301bは、図6Aに示したB−B線における断面(B−B断面)において、外周側がN極に磁化される。そして、図6Dに示すように、リング磁石301bは、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、X方向(直動方向)について等間隔で交互に繰り返す。
【0094】
したがって、X電機子巻線104(図1参照)へ電流を流すと、リング磁石301bが作る磁界との作用で可動子200(図1参照)に推力が発生する。
【0095】
なお、図6Dには、リング磁石301bにおけるN極およびS極の繰り返し数が4つの場合を例示したが、他の数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とが、X方向(直動方向)について不等間隔となるようにリング磁石301bを構成してもよい。
【0096】
このように、実施例3に係る界磁部202によれば、リング磁石301aと、リング磁石301bとを同軸上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【実施例4】
【0097】
実施例4に係る界磁部202の構成について図7A、図7B、図7Cおよび図7Dを用いて説明する。図7A〜Cは、それぞれ、実施例4に係る界磁部202の断面図(その1〜その3)であり、図7Dは、実施例4に係る界磁部202の展開図である。なお、図7Dには、外周側から見た展開図を示す。
【0098】
また、図7Aには界磁部202を側面から見た断面図を、図7Bには図7Aに示したA−A線における断面図を、図7Cには図7Aに示したB−B線における断面図を、それぞれ示す。
【0099】
図7Aおよび図7Bに示すように、実施例4に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを交互に繰り返すリング磁石401aを備える。また、図7Aおよび図7Cに示すように、実施例4に係る界磁部202は、直動方向(X方向)の外周側について、N極とS極とを交互に繰り返すリング磁石401bを備える。
【0100】
そして、図7A〜図7Cに示すように、リング磁石401aおよびリング磁石401bは、出力軸201に沿って、同心円上に設けられる。なお、リング磁石401aおよびリング磁石401bは、接着などによってお互いに固定される。また、図7A〜図7Cでは、リング磁石401aを内側に、リング磁石401bを外側に設けた場合を例示したが、両者の位置関係を逆にしてもよい。
【0101】
なお、リング磁石401aおよびリング磁石401bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石401aおよびリング磁石401bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0102】
図7Bに示すように、リング磁石401aは、図7Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について等間隔で交互に備える。
【0103】
また、図7Cに示すように、リング磁石401aのB−B断面は、A−A断面と同様である。すなわち、リング磁石401aは、X方向(直動方向)にわたって、A−A断面と同様に着磁される。
【0104】
なお、図7Bおよび図7Cには、リング磁石401aにおけるN極数とS極数との合計が8つの場合を例示したが、他の個数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とをθ方向(回転方向)について不等間隔としてもよい。
【0105】
このように、リング磁石401aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石401aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。なお、リング磁石401aが作る磁界は、リング磁石401bが作る磁界と合成されるが、この点については、図7Dを用いて後述する。
【0106】
また、図7Bに示すように、リング磁石401bは、図7Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化される。また、図7Cに示すように、リング磁石401bは、図7Aに示したB−B線における断面(B−B断面)において、外周側がS極に磁化される。
【0107】
そして、図7A〜図7Cに示すように、リング磁石401bは、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、X方向(直動方向)について等間隔で交互に繰り返す。
【0108】
したがって、X電機子巻線104へ(図1参照)電流を流すと、リング磁石401bが作る磁界との作用で可動子200(図1参照)に推力が発生する。なお、リング磁石401bが作る磁界は、リング磁石401aが作る磁界と合成されるが、この点については、図7Dを用いて後述する。
【0109】
図7Dに示すように、リング磁石401aが作る磁界と、リング磁石401bが作る磁界とは、ハニカム状に合成される。たとえば、リング磁石401aの外周側がN極、リング磁石401bの外周側がN極の部位は、N極となる。また、リング磁石401aの外周側がS極、リング磁石401bの外周側がS極の部位は、S極となる。
【0110】
そして、リング磁石401aの外周側あるいはリング磁石401bの外周側の一方がN極で他方がS極の部位は、お互いの磁束が弱め合うことで極性が弱くなる(図7Dに示す破線参照)。
【0111】
なお、図7Aおよび図7Dには、リング磁石401bにおけるN極およびS極の繰り返し数が4つの場合を例示したが、他の数としてもよい。また、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とが、X方向(直動方向)について不等間隔となるようにリング磁石401bを構成してもよい。
【0112】
このように、実施例4に係る界磁部202によれば、リング磁石401aと、リング磁石401bとを同心円上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【実施例5】
【0113】
実施例5に係る界磁部202の構成について図8A、図8B、図8Cおよび図8Dを用いて説明する。図8A〜Cは、それぞれ、実施例5に係る界磁部202の断面図(その1〜その3)であり、図8Dは、実施例5に係る界磁部202の展開図である。なお、図8Dには、外周側から見た展開図を示す。
【0114】
なお、図8Aには界磁部202を側面から見た断面図を、図8Bには図8Aに示したA−A線における断面図を、図8Cには図8Aに示したB−B線における断面図を、それぞれ示す。
【0115】
図8Aおよび図8Bに示すように、実施例5に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを不等間隔で交互に繰り返すリング磁石501aを備える。また、図8Aおよび図8Cに示すように、実施例5に係る界磁部202は、回転方向(θ方向)の外周側について、N極とS極とを不等間隔で交互に繰り返すリング磁石501bを備える。
【0116】
そして、回転方向(θ方向)の外周側においてリング磁石501aのN極の中央部と、リング磁石501bのN極の中央部とが一致するように、リング磁石501aおよびリング磁石501bは、出力軸201に沿って、同軸上に設けられる。なお、図8Aには、界磁部202が、それぞれ同数のリング磁石501aおよびリング磁石501bを備える場合を例示したが、両者を異なる個数としてもよい。
【0117】
また、図8Aには、リング磁石501aのX方向(直動方向)の幅と、リング磁石501bのX方向(直動方向)の幅とが等しい場合を例示したが、両者を異なる幅としてもよい。なお、リング磁石501aおよびリング磁石501bは、接着などによってお互いに固定される。
【0118】
なお、リング磁石501aおよびリング磁石501bを、1つの部材として形成し、形成後に着磁することとしてもよい。このように、リング磁石501aおよびリング磁石501bを一体化すれば、組み立て工数の削減や、部品精度の向上をさらに図ることができる。
【0119】
図8Bに示すように、リング磁石501aは、図8Aに示したA−A線における断面(A−A断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について不等間隔で交互に備える。なお、θ方向(回転方向)におけるN極の幅は、S極の幅よりも広い。
【0120】
このように、リング磁石501aは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石501aが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0121】
また、図8Cに示すように、リング磁石501bは、図8Aに示したB−B線における断面(B−B断面)において、外周側がN極に磁化された部位と、外周側がS極に磁化された部位とを、θ方向(回転方向)について不等間隔で交互に備える。なお、θ方向(回転方向)におけるS極の幅は、N極の幅よりも広い。
【0122】
このように、リング磁石501bは、回転方向にN極とS極とを交互に繰り返す。したがって、θ電機子巻線103(図1参照)へ電流を流すと、リング磁石501aおよびリング磁石501bが作る磁界との作用で可動子200(図1参照)にトルクが発生する。
【0123】
なお、図8Bおよび図8Cには、リング磁石501aにおけるN極の幅とS極の幅との比が、リング磁石501bにおけるS極の幅とN極の幅との比と等しい場合を例示したが、両者の比を異ならせてもよい。
【0124】
また、図8Dに示すように、リング磁石501aおよびリング磁石501bは、X方向(直動方向)に沿ってN極およびS極を繰り返す部位を有する。したがって、X電機子巻線104(図1参照)へ電流を流すと、リング磁石501aおよびリング磁石501bが作る磁界との作用で可動子200(図1参照)に推力が発生する。
【0125】
なお、可動子200(図1参照)に発生する推力とトルクとの配分は、リング磁石501aおよびリング磁石501bにおけるN極の幅とS極の幅との比を調整することで変更することができる。
【0126】
また、リング磁石501aおよびリング磁石501bにおける各極の幅の比や、θ方向(回転方向)についての相対角は、X方向(直動方向)に沿ってN極およびS極を繰り返す部位を有するものであれば足りる。
【0127】
このように、実施例5に係る界磁部202によれば、リング磁石501aと、リング磁石501bとを同軸上に配置することで、界磁部202の構造を簡略化することができるとともに、界磁部202の精度を向上させることができる。
【0128】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施例に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0129】
10、20 直動回転アクチュエータ
100、140 固定子
100a、140a モータ部
100b、140b 検出器部
101、141 モータフレーム
103、143 θ電機子巻線
103a 俵形コイル
104、144 X電機子巻線
104a リング形コイル
105、145 モータ端子
106、146 θX軸受部
106a、146a ボールスプライン
106b、146b ベアリング
107、147 負荷側ブラケット
108、148 反負荷側ブラケット
109、149 エンドブラケット
110 空隙
111 プレート
112 弾性バネ
113 エンドブッシュ
130、160 直動回転検出器
131、161 回転検出器
132、162 直動検出器
133、163 検出器フレーム
134、164 検出器端子
200、240 可動子
201、241 出力軸
202、242 界磁部
203、243 界磁ヨーク
204a、204b、244a、244b ブロック磁石
205、245 中空穴
206 反負荷側軸
207、247 継ぎ手
230、250 直動回転スケール
248 補極ヨーク
301a、301b、401a、401b、501a、501b リング磁石
【特許請求の範囲】
【請求項1】
永久磁石または鉄心歯を有する界磁部、回転方向に回転磁界を発生する第1の電機子巻線および直動方向に進行磁界を発生する第2の電機子巻線を含むモータ部と、
前記モータ部の前記界磁部へ取り付けられた出力軸と、
前記出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する直動検出器および回転検出器を含む検出器部と、
前記出力軸を直動方向および回転方向にそれぞれ支持する直動軸受および回転軸受を含む軸受部と
を備え、
前記モータ部は、前記出力軸の反負荷側に、前記検出器部は、前記出力軸の負荷側に、それぞれ配置されること
を特徴とする直動回転アクチュエータ。
【請求項2】
前記検出器部の両側に前記軸受部が配置されることを特徴とする請求項1に記載の直動回転アクチュエータ。
【請求項3】
前記モータ部と前記検出器部との間に空隙が設けられることを特徴とする請求項1または2に記載の直動回転アクチュエータ。
【請求項4】
前記出力軸は、
前記検出器部と前記界磁部とで分割して構成されることを特徴とする請求項1、2また3に記載の直動回転アクチュエータ。
【請求項5】
前記出力軸は、
非磁性材料で構成されることを特徴とする請求項1〜4のいずれか一つに記載の直動回転アクチュエータ。
【請求項6】
前記出力軸は、
中空穴が設けられることを特徴とする請求項1〜5のいずれか一つに記載の直動回転アクチュエータ。
【請求項7】
前記界磁部は、
回転方向にN極とS極とを交互に多極着磁した第1のリング磁石と、
直動方向にN極とS極とを交互に多極着磁した第2のリング磁石と
を備えることを特徴とする請求項1〜6のいずれか一つに記載の直動回転アクチュエータ。
【請求項8】
前記第1のリング磁石および前記第2のリング磁石が同軸上に配置されることを特徴とする請求項7に記載の直動回転アクチュエータ。
【請求項9】
前記第1のリング磁石および前記第2のリング磁石が同心円上に配置されることを特徴とする請求項7に記載の直動回転アクチュエータ。
【請求項10】
前記第1のリング磁石および前記第2のリング磁石は、一体として形成されることを特徴とする請求項7、8または9に記載の直動回転アクチュエータ。
【請求項11】
前記界磁部は、
回転方向におけるN極の幅がS極の幅よりも広いように該N極と該S極とを交互に多極着磁した第3のリング磁石と、
回転方向におけるN極の幅がS極の幅よりも狭いように該N極と該S極とを交互に多極着磁した第4のリング磁石と
を備えることを特徴とする請求項1〜6のいずれか一つに記載の直動回転アクチュエータ。
【請求項12】
前記界磁部は、
前記第3のリング磁石と前記第4のリング磁石とが直動方向に交互に配置されることを特徴とする請求項11に記載の直動回転アクチュエータ。
【請求項13】
前記第3のリング磁石および前記第4のリング磁石は、一体として形成されることを特徴とする請求項11または12に記載の直動回転アクチュエータ。
【請求項14】
前記界磁部と前記直動軸受との間に設けられ、前記界磁部の回転に合わせて回転する弾性バネ
を備えることを特徴とする請求項1〜13のいずれか一つに記載の直動回転アクチュエータ。
【請求項15】
前記界磁部は、
直動方向の両端にリング状の補極ヨークを備えることを特徴とする請求項1〜14のいずれか一つに記載の直動回転アクチュエータ。
【請求項16】
前記モータ部の反負荷側に前記軸受部が配置されることを特徴とする請求項2〜15のいずれか一つに記載の直動回転アクチュエータ。
【請求項1】
永久磁石または鉄心歯を有する界磁部、回転方向に回転磁界を発生する第1の電機子巻線および直動方向に進行磁界を発生する第2の電機子巻線を含むモータ部と、
前記モータ部の前記界磁部へ取り付けられた出力軸と、
前記出力軸について直動方向の位置および回転方向の角度をそれぞれ検出する直動検出器および回転検出器を含む検出器部と、
前記出力軸を直動方向および回転方向にそれぞれ支持する直動軸受および回転軸受を含む軸受部と
を備え、
前記モータ部は、前記出力軸の反負荷側に、前記検出器部は、前記出力軸の負荷側に、それぞれ配置されること
を特徴とする直動回転アクチュエータ。
【請求項2】
前記検出器部の両側に前記軸受部が配置されることを特徴とする請求項1に記載の直動回転アクチュエータ。
【請求項3】
前記モータ部と前記検出器部との間に空隙が設けられることを特徴とする請求項1または2に記載の直動回転アクチュエータ。
【請求項4】
前記出力軸は、
前記検出器部と前記界磁部とで分割して構成されることを特徴とする請求項1、2また3に記載の直動回転アクチュエータ。
【請求項5】
前記出力軸は、
非磁性材料で構成されることを特徴とする請求項1〜4のいずれか一つに記載の直動回転アクチュエータ。
【請求項6】
前記出力軸は、
中空穴が設けられることを特徴とする請求項1〜5のいずれか一つに記載の直動回転アクチュエータ。
【請求項7】
前記界磁部は、
回転方向にN極とS極とを交互に多極着磁した第1のリング磁石と、
直動方向にN極とS極とを交互に多極着磁した第2のリング磁石と
を備えることを特徴とする請求項1〜6のいずれか一つに記載の直動回転アクチュエータ。
【請求項8】
前記第1のリング磁石および前記第2のリング磁石が同軸上に配置されることを特徴とする請求項7に記載の直動回転アクチュエータ。
【請求項9】
前記第1のリング磁石および前記第2のリング磁石が同心円上に配置されることを特徴とする請求項7に記載の直動回転アクチュエータ。
【請求項10】
前記第1のリング磁石および前記第2のリング磁石は、一体として形成されることを特徴とする請求項7、8または9に記載の直動回転アクチュエータ。
【請求項11】
前記界磁部は、
回転方向におけるN極の幅がS極の幅よりも広いように該N極と該S極とを交互に多極着磁した第3のリング磁石と、
回転方向におけるN極の幅がS極の幅よりも狭いように該N極と該S極とを交互に多極着磁した第4のリング磁石と
を備えることを特徴とする請求項1〜6のいずれか一つに記載の直動回転アクチュエータ。
【請求項12】
前記界磁部は、
前記第3のリング磁石と前記第4のリング磁石とが直動方向に交互に配置されることを特徴とする請求項11に記載の直動回転アクチュエータ。
【請求項13】
前記第3のリング磁石および前記第4のリング磁石は、一体として形成されることを特徴とする請求項11または12に記載の直動回転アクチュエータ。
【請求項14】
前記界磁部と前記直動軸受との間に設けられ、前記界磁部の回転に合わせて回転する弾性バネ
を備えることを特徴とする請求項1〜13のいずれか一つに記載の直動回転アクチュエータ。
【請求項15】
前記界磁部は、
直動方向の両端にリング状の補極ヨークを備えることを特徴とする請求項1〜14のいずれか一つに記載の直動回転アクチュエータ。
【請求項16】
前記モータ部の反負荷側に前記軸受部が配置されることを特徴とする請求項2〜15のいずれか一つに記載の直動回転アクチュエータ。
【図1】


【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図7C】
【図7D】
【図8A】
【図8B】
【図8C】
【図8D】
【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図7C】
【図7D】
【図8A】
【図8B】
【図8C】
【図8D】
【公開番号】特開2011−239661(P2011−239661A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2011−4368(P2011−4368)
【出願日】平成23年1月12日(2011.1.12)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成23年1月12日(2011.1.12)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]