
直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置

【課題】複数のスライダを有する直動駆動装置であっても、一の検出点から得られた振動信号だけで、何れかのスライダにおける損傷等の異常を検知する。
【解決手段】この異常検知方法は、直動駆動装置1の作動時の振動を測定可能に一の振動センサ10を取り付け、この一の振動センサ10の出力から、移動テーブル5を質量とするとともに複数のスライダ4をばねとする、ばね−質量系の固有振動数以上の周波数成分を除去して得られた振動信号の大きさに基づいて、何れかのスライダ4における損傷等の異常を検知する。
【解決手段】この異常検知方法は、直動駆動装置1の作動時の振動を測定可能に一の振動センサ10を取り付け、この一の振動センサ10の出力から、移動テーブル5を質量とするとともに複数のスライダ4をばねとする、ばね−質量系の固有振動数以上の周波数成分を除去して得られた振動信号の大きさに基づいて、何れかのスライダ4における損傷等の異常を検知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置に係り、特に、この種の直動駆動装置に装備する直動案内装置の複数のスライダにおける損傷等の異常を検知する方法、並びに異常検知装置およびこれを備える直動駆動装置に関する。
【背景技術】
【0002】
この種の直動駆動装置のスライダにおける損傷等の異常を検知する方法としては、例えば特許文献1に記載の技術が開示されている。同文献に記載の技術では、直動案内装置のスライダに振動センサを直接設置し、そのスライダにおける損傷等の異常を、高周波を対象として検知している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平05−281094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、同文献に記載の技術では、直動案内装置のスライダに振動センサを直接設置する必要がある。これは、測定周波数が高周波のため、振動が遠くまで届かないからである。そのため、直動案内装置に複数のスライダがある場合、各スライダ毎に振動センサが必要となる。したがって、振動センサのコストや配線の取り回しが煩雑になるなどの問題がある。
【0005】
そこで、本発明は、このような問題点に着目してなされたものであって、複数のスライダを有する直動駆動装置であっても、一の検出点から得られた振動信号だけで、何れかのスライダにおける損傷等の異常を検知し得る直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願発明者は、複数のスライダを有する直動駆動装置であっても、各スライダからの低周波の振動成分は、その振動が離れた場所までも伝わる点に着目した。そして、後述する実施形態で詳述するように、本願発明者が実験を重ねて鋭意検討したところ、複数のスライダを有する直動案内装置と、これらスライダに支持されている移動テーブルとを備えて構成されている直動駆動装置のどの場所に検出点を設定した場合であっても、その設定した一の検出点から得られた振動信号を解析するだけで、全てのスライダの振動を捉えることができ、これにより、全てのスライダの振動測定が可能となり、その結果、直動案内装置の損傷状況を把握できるという知見を得るに至った。
【0007】
すなわち、本発明のうち第一の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する方法であって、前記直動駆動装置の作動時の振動を一の検出点から測定する振動測定工程と、その振動測定工程で測定した一の検出点からの振動信号を濾波する濾波工程と、その濾波工程を経た前記一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知工程とを含み、前記濾波工程は、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、前記異常検知工程は、前記濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知することを特徴としている。
【0008】
第一の発明に係る直動駆動装置の異常検知方法によれば、濾波工程において、一の検出点から測定して得られた振動信号を、移動テーブルを質量とするとともに複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、異常検知工程において、濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダの異常を検知するので、直動駆動装置に複数のスライダがある場合であっても、直動駆動装置の一の検出点からの振動信号を測定するだけで、何れかのスライダにおける損傷等の異常を検知することができる。
【0009】
ここで、第一の発明に係る直動駆動装置の異常検知方法において、前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。このような構成であれば、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上で好適である。
【0010】
また、本発明のうち第二の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する異常検知装置であって、前記直動駆動装置の作動時の振動を一の検出点から測定する振動センサと、その一の振動センサで測定した振動信号を濾波するフィルタと、そのフィルタから出力された一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知部とを有し、前記フィルタは、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去するようになっており、前記異常検知部は、前記フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっていることを特徴としている。
【0011】
第二の発明に係る直動駆動装置の異常検知装置によれば、フィルタによって、一の検出点から測定して得られた振動信号を、移動テーブルを質量とするとともに複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、異常検知部において、フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダの異常を検知するので、直動駆動装置に複数のスライダがある場合であっても、一の振動センサを直動駆動装置に取り付けるだけで、何れかのスライダにおける損傷等の異常を検知することができる。
【0012】
ここで、第二の発明に係る直動駆動装置の異常検知装置において、前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。このような構成であれば、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上で好適である。
また、本発明のうち第三の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルと、前記直動案内装置の異常を検知する異常検知装置とを備える直動駆動装置であって、前記異常検知装置として、第二の発明に係る異常検知装置を備えていることを特徴としている。
【0013】
第三の発明に係る直動駆動装置によれば、異常検知装置として、上記第二の発明に係る異常検知装置を備えているので、一の振動センサを取り付けるだけで、何れかのスライダの異常を検知することができる。
【発明の効果】
【0014】
上述のように、本発明によれば、複数のスライダを有する直動駆動装置であっても、一の検出点から得られた振動信号だけで、何れかのスライダにおける損傷等の異常を検知することができる。すなわち、複数のスライダを有する直動駆動装置において、振動センサの必要数を一とすることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明に係る異常検知方法を適用する直動駆動装置の一実施形態の平面図である。
【図2】図1に示す直動案内装置の複数のスライダをばねとするとともに移動テーブルを質量とする、ばね−質量系の固有振動数をインパクト加振によって求めた結果を示すグラフである。
【図3】スライダ(MR)の軌道面に損傷がある場合と無い場合とで、振動加速度のレベルを比較した結果を示すグラフである。
【図4】各スライダでの周波数分布を測定したそれぞれの結果を示すグラフ((a)〜(d))である。
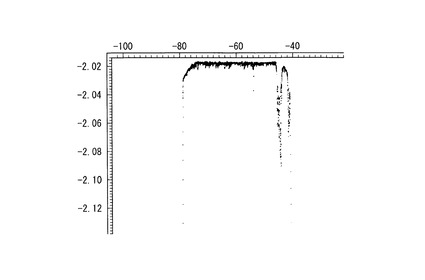
【図5】剥離した軌道面の形状測定の結果を示す図である。
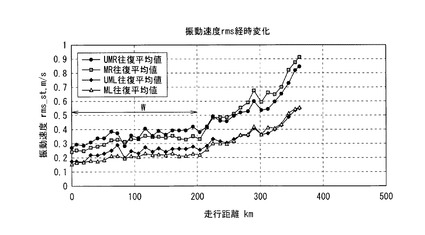
【図6】各スライダの振動速度rms値の、経時変化のグラフである。
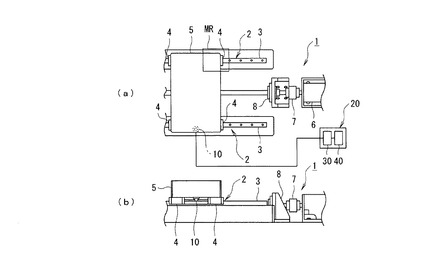
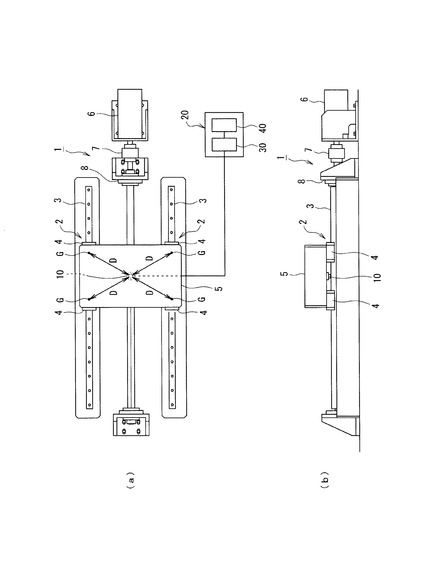
【図7】本発明に係る直動駆動装置の一実施例(実施例1)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
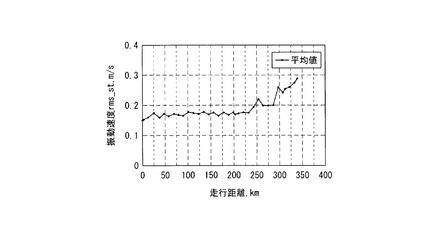
【図8】スライダの軌道面が無傷の状態から損傷が発生するまでの、振動速度の実効値の平均値の変化を示すグラフである。
【図9】直動案内装置の軌道面を確認した結果を示すグラフである。
【図10】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
【図11】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
【図12】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
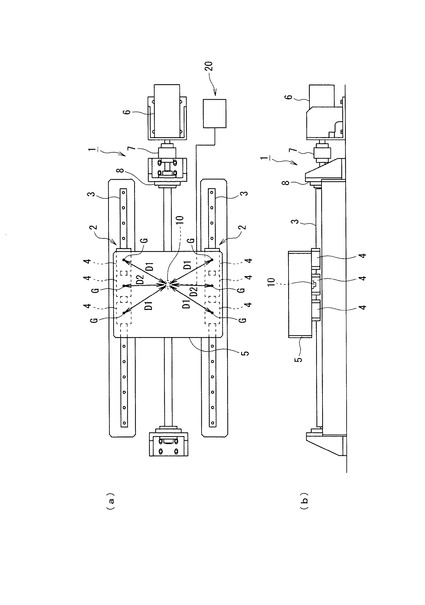
【図13】本発明に係る直動駆動装置の一実施例(実施例2)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
【図14】本発明に係る直動駆動装置の一実施例(実施例2の変形例)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
【発明を実施するための形態】
【0016】
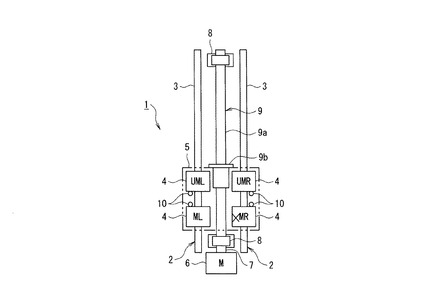
まず、本発明に係る異常検知装置およびこれを備えた直動駆動装置を開発するにあたって実施した試験およびこれに基づく知見について説明する。図1は、実施した試験に用いた直動駆動装置の概略を示す平面図である。
同図に示すように、この直動駆動装置1は、二組の直動案内装置2と、その直動案内装置2の複数のスライダ4に支持される移動テーブル5とを有して構成されている。
【0017】
詳しくは、各直動案内装置2は、一本の案内レール3に2個のスライダ4がスライド移動可能に跨設されており、この二組の直動案内装置2の計4個のスライダ4(同図に示す、UML,ML,UMR,MR)で移動テーブル5を支持している。そして、二組の直動案内装置2は、その案内レール3相互が並設されており、これら案内レール3同士の間にボールねじ9が並行に設けられている。このボールねじ9は、ねじ軸9aと、このねじ軸9aに対して複数の転動体(不図示)を介してスライド移動可能に外嵌するナット9bとを有し、このナット9bのフランジが上記移動テーブル5の一端に締結されている。そして、ねじ軸9aの両端は、軸支部8によって回転自在にそれぞれ支持され、さらに、ねじ軸9aの一端側(同図下側)は、カップリング7を介して駆動用のモータ6の出力軸に連結されている。これにより、この直動駆動装置1は、モータ6の駆動に応じたボールねじ9の駆動によって移動テーブル5が案内レール3に沿ってスライド移動するようになっている。
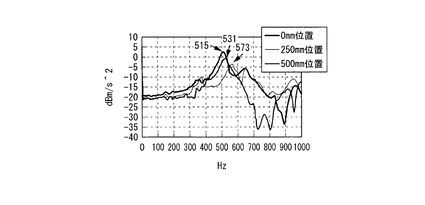
【0018】
そして、本試験においては、同図に示すように、各スライダ4近傍(この例では移動テーブル5の下面)に、振動センサ10のピックアップをそれぞれ取り付けた。そして、この状態で、移動テーブル5をインパクト加振して、移動テーブル5を質量とするとともに、計4個のスライダ4をばねとする、ばね−質量系の固有振動数を求めた。図2は、図1に示す直動案内装置2の計4個のスライダ4をばねとするとともに、移動テーブル5を質量とする、ばね−質量系の固有振動数をインパクト加振によって求めた結果を示す図である。同図に示す結果からわかるように、当該ばね−質量系においては、400Hz〜600Hz(移動テーブル5の位置により異なる)の間に固有振動数があることがわかる。
【0019】
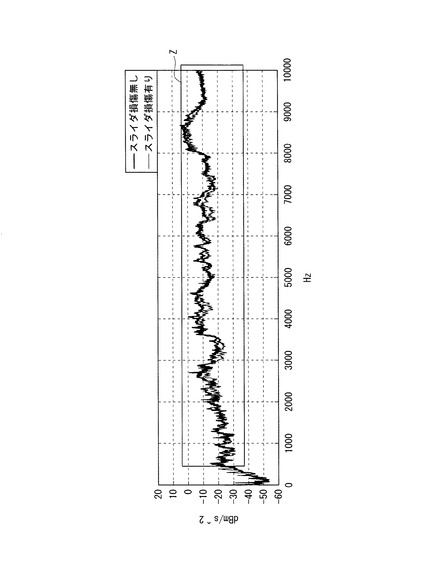
そして、4個のスライダ4のうち、図1に「×印」を付したスライダ4(MR)の軌道面に人工的に損傷を設け、損傷がある場合と無い場合とで、振動加速度のレベルを比較した。その結果を示すグラフを図3に示す。同図からわかるように、損傷の有無で振動加速度の大きさを比較すると、同図の枠Zで囲んだ、当該ばね−質量系の固有振動数以上の振動数は、枠Z以外の低周波の範囲よりも振動値のレベルは大きい。しかしながら、枠Zで囲んだ振動数の範囲からは、スライダ4(MR)の「損傷有り」が「損傷無し」よりも振動加速度が大きいということは確認できず、スライダの損傷の有無と振動加速度のレベルの大きさとには相関性が見られない。
【0020】
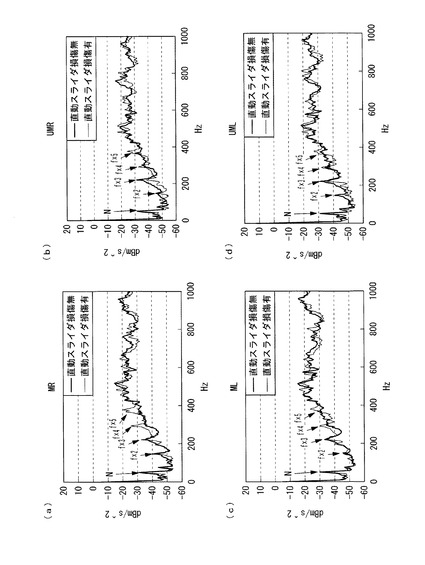
これに対し、図4(a)〜(d)に、上記図3での1kHz以下の振動成分において、「損傷有り」と「損傷無し」とで振動加速度のレベルを比較した結果を示す。なお、図4(a)〜(d)それぞれは、上記4個のスライダ4(UML,ML,UMR,MR)それぞれの近傍に付設した振動センサ10のピックアップに対応している。
図4(a)に示すように、「スライダ−移動テーブル」の固有振動数未満(400Hz未満)の低周波では、振動加速度のレベルは1kHz以上の高周波よりも小さい。しかし、「損傷有り」の振動加速度のレベルは、「損傷無し」の振動加速度のレベルに比べて、幾何学的に計算される傷起因周波数(速度600mm/玉径3.968mm/2=75.6Hz)のN倍波において、振動値レベルが大きいことが確認できる。また、図4(b)〜図4(d)に示すように、上記スライダ4(MR)以外の場所となるスライダ4(UMR,ML,UML)に対応した位置に付設した振動センサであっても、図4(a)と同様に、幾何学的に計算される傷起因周波数のN倍波が観測されている。このことから、振動センサ10から離れたスライダ4であってもその離れたスライダ4の損傷を起因とする振動の検知が可能となることがわかる。
【0021】
次に、上述した、図1に示す直動駆動装置1(新規に用意したもの)を用いて、いずれかのスライダ4の軌道面が剥離するまで走行させ、各スライダ4の振動速度rms値(振動値)の経時変化を調べた。
この試験では、364kmの走行をさせた時点で、図1の符号UMLのスライダ4の軌道面に剥離が生じた。生じた剥離の大きさは、幅2.2mm、深さ70μmであった(剥離した軌道面の形状測定の結果を図5に示す)。一方、その他のスライダ4((ML,UMR,MR)は無傷であることを確認して走行試験を終了した。各スライダの振動速度rms値の、経時変化のグラフを図6に示す。
【0022】
同図に示すように、走行距離が200kmまで(矢印Wに示す範囲)は、振動速度rms値は、概ね横ばいで推移している。しかし、走行距離が200km以降は、全てのスライダ4の振動速度rms値が大きくなっていることがわかる。そこで、振動速度rms値がどれ程大きくなったのかを数値で確認するために、軌道面の損傷による各スライダ4の振動速度rms値の変化率を以下のようにして調べた。
【0023】
まず、軌道面が損傷していないであろうと考えられる0〜200kmまでの振動速度rms値の平均を基準値とした。そして、走行距離が364kmでの振動速度rms値を基準値からの変化率で比較した。その結果、符号UMRのスライダ4は、基準値の2.4倍、MRは2.3倍、UMLは2.9倍、MLは2.4倍であり、軌道面が損傷したUMLのスライダ4の変化率が一番大きかった。このことから、振動センサ1は、軌道面が損傷したスライダ4(UML)に近いほど、損傷の進行状況を検知する感度が高く、軌道面が損傷したスライダ4(UML)から遠いほど、損傷の進行状況を検知する感度が鈍くなることがわかった。
【0024】
以上の結果から、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にするためには、後述する実施例2(およびその変形例)に示すように、各スライダ4に対して同一距離、または前記同一距離よりも短い距離に位置するように、単一の振動センサ1を設置することが望ましいことがわかった。
このように、本発明の直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置は、上述の知見に基づいてなされたものであり、「スライダ−移動テーブル」の固有振動数以上の周波数成分をフィルタで除去して得られた振動加速度のレベルの変化に基づいて、単体の振動センサであっても、全てのスライダの軌道面の損傷状況を知ることを可能とするものである。
【0025】
[実施例]
以下、実施例について説明する。なお、上記試験に用いた直動駆動装置1と同様の構成については同一の符号を付し、その説明については適宜省略する。
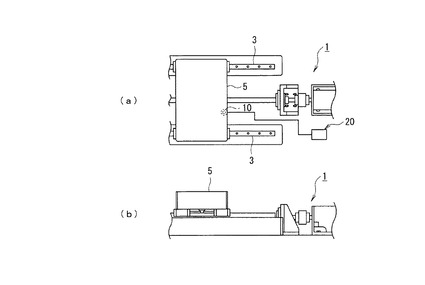
図7に実施例1を示す。
図7に示すように、本実施例では、2本の案内レール3および4つのスライダ4をもつ直動案内装置2と、移動テーブル5と、異常検知装置20とを備えて構成される直動案内装置1を用意した。
【0026】
ここで、この異常検知装置20は、振動センサ10、電子フィルタ30および異常検知部40を有して構成され、直動駆動装置1の振動を一の振動センサ10によって測定し、その振動センサ10で測定した振動信号を電子フィルタ30に通した後に異常検知部40に送る。そして、異常検知部40は、電子フィルタ30を経て得られた振動信号の大きさに基づいて直動案内装置2のスライダ4の異常を検知するようになっている。
【0027】
詳しくは、振動センサ10は、直動駆動装置1の作動時の振動を測定可能であり、本実施例では、移動テーブル5の一端の側の下面に、単一の振動センサ10が設置されている。
電子フィルタ30は、振動センサ10で測定した振動信号に対し、スライダ−移動テーブルの固有振動数以上の周波数成分を除去するフィルタである。なお、この電子フィルタ30の遮断周波数の設定は、予め、この直動駆動装置1において、移動テーブル5をインパクト加振して、移動テーブル5を質量とするとともに複数のスライダ4をばねとする、ばね−質量系の固有振動数を求めた。そして、この求めたスライダ−移動テーブルの固有振動数以上の周波数成分を電子フィルタ30で除去するように設定している。
【0028】
異常検知部40は、直動駆動装置1全体を制御する制御部を含み、所定のプログラムにより一連の異常検知処理を実行する。すなわち、この異常検知部40は、電子フィルタ30による濾波後の振動信号に対し、その周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっている。
より具体的には、本実施例においては、電子フィルタ30による濾波後の振動信号に対して所定の演算処理を行って実効値を算出し、さらに、その実効値の平均値を求め、この求めた平均値に基づいて、何れかのスライダにおける損傷等の異常の有無を検知する。また、この異常検知部40は、例えば、必要に応じてその異常検知の結果に基づいて上記モータ6の駆動を制御し、例えば直動駆動装置1を緊急停止させるなどの処理を実行する。
【0029】
次に、上記直動駆動装置1の動作、およびその作用・効果について説明する。
この直動駆動装置1は、直動駆動装置1が稼働されると、その作動時の振動を、上記単一の振動センサ10によって随時に測定する(振動測定工程)。そして、その単一の振動センサ10で測定した一の検出点からの振動信号は電子フィルタ30で濾波される(濾波工程)。ここで、この濾波工程では、先に求めた固有振動数に基づき、移動テーブル5−スライダ4の固有振動数以上の振動を除去している。なお、本実施例では、移動テーブル5−スライダ4の固有振動数以上の振動を除去した周波数範囲で、直動駆動装置1の振動速度を7往復分測定している。そして、異常検知部40は、濾波後の振動信号に対して実効値を算出し、さらに、その実効値の平均値を算出し、この求めた平均値に基づいて何れかのスライダにおける損傷等の異常の有無を検知する(異常検知工程)。
【0030】
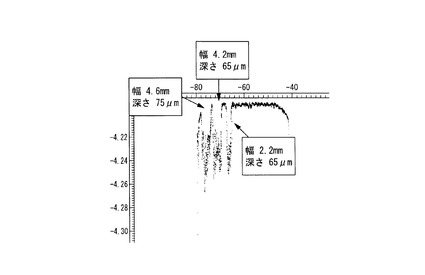
図8は、上記異常検知部40の出力結果であって、スライダ4の軌道面が、無傷の状態から損傷が発生するまでの、振動速度の実効値の平均値の変化を示すグラフであり、横軸が走行距離、縦軸が振動速度である。
同図からわかるように、本実施例の直動駆動装置1においては、振動速度の平均が0.18m/sの安定した状態で230kmまで走行した後、再び上昇し始めている。そこで、340km走行した時点で、直動案内装置の軌道面を確認したところ、図7での四角で囲んだスライダ4(MR)において、図9に示すように、深さ65〜75μm、幅2.2〜4.6mmの剥離が確認された。これにより、スライダ4(MR)から離れた位置に付設した一の振動センサ10であっても、振動速度の実効値の増加に基づいて、スライダ4(MR)の損傷状況を確認できることが検証された。
【0031】
なお、本発明に係る直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置は、上記実施形態ないし実施例に限定されるものではなく、本発明の趣旨を逸脱しなければ種々の変形が可能なことは勿論である。
例えば、本発明に用いられる一の振動センサの付設位置は、図7に示す実施例1に示す位置だけに限定されない。
【0032】
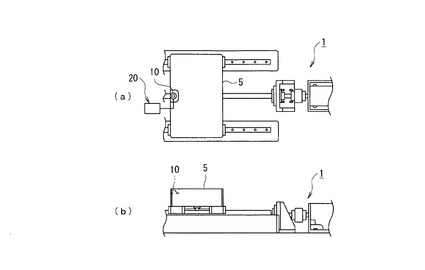
例えば図10〜図12に実施例1の変形例を示す。つまり、図10に示すように、移動テーブル5の、案内レール3と案内レール3との間の位置であってもよいし、また、図11に示すように、移動テーブルの一部をフライス等で加工して、その加工面上に振動センサ10を載せてもよい。また、図12に示すように、移動テーブル5の側面に振動センサ10を貼り付けても良く、このように、振動センサを設置する方向や場所は、直動駆動装置の作動時の振動を測定可能であればどこでもよい。また、振動測定は、振動加速度、振動速度、振動位置のいずれであってもよい。
【0033】
しかし、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上では、上述した一の検出点が、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。以下、一の検出点の、このような設置例について実施例に基づき説明する。
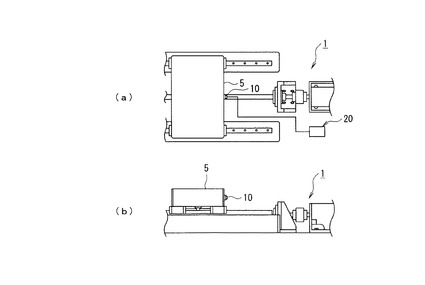
図13に実施例2を示す。
【0034】
同図に示すように、この実施例2では、上記実施例1に対し、上記単一の振動センサ10が、前記一の検出点として、各スライダ4に対して同一距離Dに位置する箇所に付設されている点が異なっている。ここで、同図において符号Gは、各スライダ4の重心の位置を表わしている。なお、一の検出点の設置位置以外の構成については、上記実施例1の構成と同様であるため、その説明を省略する。
【0035】
すなわち、上述した実施例1では、振動センサ10の設置位置を、移動テーブル5の一端の側の下面とした例であったが、この実施例2では、移動テーブル5の中心の下面に設置している。
一の振動センサ10をこのように設置すれば、各スライダ4からの距離をほぼ同一距離に且つほぼ最短距離にすることができるため、上述したように、各スライダ4の振動測定条件を、最良かつ均一にすることができる。そのため、各スライダ4の損傷の進行状況から異常を検知する感度をより高く且つ均一にすることができる。
【0036】
ここで、上記実施例2に示すように、一の振動センサ10を、各スライダ4から同一距離に且つ最短距離に設置できれば、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にする上で好適であるが、複数のスライダの数や、スライダ4と移動テーブル5との相対位置によっては、各スライダ4から同一距離に且つ最短距離に設置することが難しい場合がある。
【0037】
すなわち、例えば図14に示すように、各直動案内装置2に対し、スライダ4がそれぞれ3個ずつ跨設されており、また、スライダ4のスライド方向に対し、移動テーブル5が偏倚して固定されているような場合が想定できる。
そこで、このような場合であれば、同図に示すように、対角線方向の4つのスライダ4については、上記実施例1同様に同一距離D1に位置させ、間に挟まれた上下二つのスライダ4については、同一距離D1よりも短い最短距離D2に位置するように単一の振動センサ1を付設すれば、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にする上で好適である。
【符号の説明】
【0038】
1 直動駆動装置
2 直動案内装置
3 案内レール
4 スライダ
5 移動テーブル
6 モータ
7 カップリング
8 軸支部
9 ボールねじ
10 振動センサ
20 異常検知装置
30 電子フィルタ
40 異常検知部
【技術分野】
【0001】
本発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置に係り、特に、この種の直動駆動装置に装備する直動案内装置の複数のスライダにおける損傷等の異常を検知する方法、並びに異常検知装置およびこれを備える直動駆動装置に関する。
【背景技術】
【0002】
この種の直動駆動装置のスライダにおける損傷等の異常を検知する方法としては、例えば特許文献1に記載の技術が開示されている。同文献に記載の技術では、直動案内装置のスライダに振動センサを直接設置し、そのスライダにおける損傷等の異常を、高周波を対象として検知している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平05−281094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、同文献に記載の技術では、直動案内装置のスライダに振動センサを直接設置する必要がある。これは、測定周波数が高周波のため、振動が遠くまで届かないからである。そのため、直動案内装置に複数のスライダがある場合、各スライダ毎に振動センサが必要となる。したがって、振動センサのコストや配線の取り回しが煩雑になるなどの問題がある。
【0005】
そこで、本発明は、このような問題点に着目してなされたものであって、複数のスライダを有する直動駆動装置であっても、一の検出点から得られた振動信号だけで、何れかのスライダにおける損傷等の異常を検知し得る直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願発明者は、複数のスライダを有する直動駆動装置であっても、各スライダからの低周波の振動成分は、その振動が離れた場所までも伝わる点に着目した。そして、後述する実施形態で詳述するように、本願発明者が実験を重ねて鋭意検討したところ、複数のスライダを有する直動案内装置と、これらスライダに支持されている移動テーブルとを備えて構成されている直動駆動装置のどの場所に検出点を設定した場合であっても、その設定した一の検出点から得られた振動信号を解析するだけで、全てのスライダの振動を捉えることができ、これにより、全てのスライダの振動測定が可能となり、その結果、直動案内装置の損傷状況を把握できるという知見を得るに至った。
【0007】
すなわち、本発明のうち第一の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する方法であって、前記直動駆動装置の作動時の振動を一の検出点から測定する振動測定工程と、その振動測定工程で測定した一の検出点からの振動信号を濾波する濾波工程と、その濾波工程を経た前記一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知工程とを含み、前記濾波工程は、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、前記異常検知工程は、前記濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知することを特徴としている。
【0008】
第一の発明に係る直動駆動装置の異常検知方法によれば、濾波工程において、一の検出点から測定して得られた振動信号を、移動テーブルを質量とするとともに複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、異常検知工程において、濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダの異常を検知するので、直動駆動装置に複数のスライダがある場合であっても、直動駆動装置の一の検出点からの振動信号を測定するだけで、何れかのスライダにおける損傷等の異常を検知することができる。
【0009】
ここで、第一の発明に係る直動駆動装置の異常検知方法において、前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。このような構成であれば、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上で好適である。
【0010】
また、本発明のうち第二の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する異常検知装置であって、前記直動駆動装置の作動時の振動を一の検出点から測定する振動センサと、その一の振動センサで測定した振動信号を濾波するフィルタと、そのフィルタから出力された一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知部とを有し、前記フィルタは、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去するようになっており、前記異常検知部は、前記フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっていることを特徴としている。
【0011】
第二の発明に係る直動駆動装置の異常検知装置によれば、フィルタによって、一の検出点から測定して得られた振動信号を、移動テーブルを質量とするとともに複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、異常検知部において、フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダの異常を検知するので、直動駆動装置に複数のスライダがある場合であっても、一の振動センサを直動駆動装置に取り付けるだけで、何れかのスライダにおける損傷等の異常を検知することができる。
【0012】
ここで、第二の発明に係る直動駆動装置の異常検知装置において、前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。このような構成であれば、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上で好適である。
また、本発明のうち第三の発明は、案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルと、前記直動案内装置の異常を検知する異常検知装置とを備える直動駆動装置であって、前記異常検知装置として、第二の発明に係る異常検知装置を備えていることを特徴としている。
【0013】
第三の発明に係る直動駆動装置によれば、異常検知装置として、上記第二の発明に係る異常検知装置を備えているので、一の振動センサを取り付けるだけで、何れかのスライダの異常を検知することができる。
【発明の効果】
【0014】
上述のように、本発明によれば、複数のスライダを有する直動駆動装置であっても、一の検出点から得られた振動信号だけで、何れかのスライダにおける損傷等の異常を検知することができる。すなわち、複数のスライダを有する直動駆動装置において、振動センサの必要数を一とすることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明に係る異常検知方法を適用する直動駆動装置の一実施形態の平面図である。
【図2】図1に示す直動案内装置の複数のスライダをばねとするとともに移動テーブルを質量とする、ばね−質量系の固有振動数をインパクト加振によって求めた結果を示すグラフである。
【図3】スライダ(MR)の軌道面に損傷がある場合と無い場合とで、振動加速度のレベルを比較した結果を示すグラフである。
【図4】各スライダでの周波数分布を測定したそれぞれの結果を示すグラフ((a)〜(d))である。
【図5】剥離した軌道面の形状測定の結果を示す図である。
【図6】各スライダの振動速度rms値の、経時変化のグラフである。
【図7】本発明に係る直動駆動装置の一実施例(実施例1)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
【図8】スライダの軌道面が無傷の状態から損傷が発生するまでの、振動速度の実効値の平均値の変化を示すグラフである。
【図9】直動案内装置の軌道面を確認した結果を示すグラフである。
【図10】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
【図11】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
【図12】振動センサの付設位置の他の例(実施例1の変形例)を説明する図である。
【図13】本発明に係る直動駆動装置の一実施例(実施例2)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
【図14】本発明に係る直動駆動装置の一実施例(実施例2の変形例)を説明する図であり、同図(a)はその平面図、同図(b)は正面図である。
【発明を実施するための形態】
【0016】
まず、本発明に係る異常検知装置およびこれを備えた直動駆動装置を開発するにあたって実施した試験およびこれに基づく知見について説明する。図1は、実施した試験に用いた直動駆動装置の概略を示す平面図である。
同図に示すように、この直動駆動装置1は、二組の直動案内装置2と、その直動案内装置2の複数のスライダ4に支持される移動テーブル5とを有して構成されている。
【0017】
詳しくは、各直動案内装置2は、一本の案内レール3に2個のスライダ4がスライド移動可能に跨設されており、この二組の直動案内装置2の計4個のスライダ4(同図に示す、UML,ML,UMR,MR)で移動テーブル5を支持している。そして、二組の直動案内装置2は、その案内レール3相互が並設されており、これら案内レール3同士の間にボールねじ9が並行に設けられている。このボールねじ9は、ねじ軸9aと、このねじ軸9aに対して複数の転動体(不図示)を介してスライド移動可能に外嵌するナット9bとを有し、このナット9bのフランジが上記移動テーブル5の一端に締結されている。そして、ねじ軸9aの両端は、軸支部8によって回転自在にそれぞれ支持され、さらに、ねじ軸9aの一端側(同図下側)は、カップリング7を介して駆動用のモータ6の出力軸に連結されている。これにより、この直動駆動装置1は、モータ6の駆動に応じたボールねじ9の駆動によって移動テーブル5が案内レール3に沿ってスライド移動するようになっている。
【0018】
そして、本試験においては、同図に示すように、各スライダ4近傍(この例では移動テーブル5の下面)に、振動センサ10のピックアップをそれぞれ取り付けた。そして、この状態で、移動テーブル5をインパクト加振して、移動テーブル5を質量とするとともに、計4個のスライダ4をばねとする、ばね−質量系の固有振動数を求めた。図2は、図1に示す直動案内装置2の計4個のスライダ4をばねとするとともに、移動テーブル5を質量とする、ばね−質量系の固有振動数をインパクト加振によって求めた結果を示す図である。同図に示す結果からわかるように、当該ばね−質量系においては、400Hz〜600Hz(移動テーブル5の位置により異なる)の間に固有振動数があることがわかる。
【0019】
そして、4個のスライダ4のうち、図1に「×印」を付したスライダ4(MR)の軌道面に人工的に損傷を設け、損傷がある場合と無い場合とで、振動加速度のレベルを比較した。その結果を示すグラフを図3に示す。同図からわかるように、損傷の有無で振動加速度の大きさを比較すると、同図の枠Zで囲んだ、当該ばね−質量系の固有振動数以上の振動数は、枠Z以外の低周波の範囲よりも振動値のレベルは大きい。しかしながら、枠Zで囲んだ振動数の範囲からは、スライダ4(MR)の「損傷有り」が「損傷無し」よりも振動加速度が大きいということは確認できず、スライダの損傷の有無と振動加速度のレベルの大きさとには相関性が見られない。
【0020】
これに対し、図4(a)〜(d)に、上記図3での1kHz以下の振動成分において、「損傷有り」と「損傷無し」とで振動加速度のレベルを比較した結果を示す。なお、図4(a)〜(d)それぞれは、上記4個のスライダ4(UML,ML,UMR,MR)それぞれの近傍に付設した振動センサ10のピックアップに対応している。
図4(a)に示すように、「スライダ−移動テーブル」の固有振動数未満(400Hz未満)の低周波では、振動加速度のレベルは1kHz以上の高周波よりも小さい。しかし、「損傷有り」の振動加速度のレベルは、「損傷無し」の振動加速度のレベルに比べて、幾何学的に計算される傷起因周波数(速度600mm/玉径3.968mm/2=75.6Hz)のN倍波において、振動値レベルが大きいことが確認できる。また、図4(b)〜図4(d)に示すように、上記スライダ4(MR)以外の場所となるスライダ4(UMR,ML,UML)に対応した位置に付設した振動センサであっても、図4(a)と同様に、幾何学的に計算される傷起因周波数のN倍波が観測されている。このことから、振動センサ10から離れたスライダ4であってもその離れたスライダ4の損傷を起因とする振動の検知が可能となることがわかる。
【0021】
次に、上述した、図1に示す直動駆動装置1(新規に用意したもの)を用いて、いずれかのスライダ4の軌道面が剥離するまで走行させ、各スライダ4の振動速度rms値(振動値)の経時変化を調べた。
この試験では、364kmの走行をさせた時点で、図1の符号UMLのスライダ4の軌道面に剥離が生じた。生じた剥離の大きさは、幅2.2mm、深さ70μmであった(剥離した軌道面の形状測定の結果を図5に示す)。一方、その他のスライダ4((ML,UMR,MR)は無傷であることを確認して走行試験を終了した。各スライダの振動速度rms値の、経時変化のグラフを図6に示す。
【0022】
同図に示すように、走行距離が200kmまで(矢印Wに示す範囲)は、振動速度rms値は、概ね横ばいで推移している。しかし、走行距離が200km以降は、全てのスライダ4の振動速度rms値が大きくなっていることがわかる。そこで、振動速度rms値がどれ程大きくなったのかを数値で確認するために、軌道面の損傷による各スライダ4の振動速度rms値の変化率を以下のようにして調べた。
【0023】
まず、軌道面が損傷していないであろうと考えられる0〜200kmまでの振動速度rms値の平均を基準値とした。そして、走行距離が364kmでの振動速度rms値を基準値からの変化率で比較した。その結果、符号UMRのスライダ4は、基準値の2.4倍、MRは2.3倍、UMLは2.9倍、MLは2.4倍であり、軌道面が損傷したUMLのスライダ4の変化率が一番大きかった。このことから、振動センサ1は、軌道面が損傷したスライダ4(UML)に近いほど、損傷の進行状況を検知する感度が高く、軌道面が損傷したスライダ4(UML)から遠いほど、損傷の進行状況を検知する感度が鈍くなることがわかった。
【0024】
以上の結果から、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にするためには、後述する実施例2(およびその変形例)に示すように、各スライダ4に対して同一距離、または前記同一距離よりも短い距離に位置するように、単一の振動センサ1を設置することが望ましいことがわかった。
このように、本発明の直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置は、上述の知見に基づいてなされたものであり、「スライダ−移動テーブル」の固有振動数以上の周波数成分をフィルタで除去して得られた振動加速度のレベルの変化に基づいて、単体の振動センサであっても、全てのスライダの軌道面の損傷状況を知ることを可能とするものである。
【0025】
[実施例]
以下、実施例について説明する。なお、上記試験に用いた直動駆動装置1と同様の構成については同一の符号を付し、その説明については適宜省略する。
図7に実施例1を示す。
図7に示すように、本実施例では、2本の案内レール3および4つのスライダ4をもつ直動案内装置2と、移動テーブル5と、異常検知装置20とを備えて構成される直動案内装置1を用意した。
【0026】
ここで、この異常検知装置20は、振動センサ10、電子フィルタ30および異常検知部40を有して構成され、直動駆動装置1の振動を一の振動センサ10によって測定し、その振動センサ10で測定した振動信号を電子フィルタ30に通した後に異常検知部40に送る。そして、異常検知部40は、電子フィルタ30を経て得られた振動信号の大きさに基づいて直動案内装置2のスライダ4の異常を検知するようになっている。
【0027】
詳しくは、振動センサ10は、直動駆動装置1の作動時の振動を測定可能であり、本実施例では、移動テーブル5の一端の側の下面に、単一の振動センサ10が設置されている。
電子フィルタ30は、振動センサ10で測定した振動信号に対し、スライダ−移動テーブルの固有振動数以上の周波数成分を除去するフィルタである。なお、この電子フィルタ30の遮断周波数の設定は、予め、この直動駆動装置1において、移動テーブル5をインパクト加振して、移動テーブル5を質量とするとともに複数のスライダ4をばねとする、ばね−質量系の固有振動数を求めた。そして、この求めたスライダ−移動テーブルの固有振動数以上の周波数成分を電子フィルタ30で除去するように設定している。
【0028】
異常検知部40は、直動駆動装置1全体を制御する制御部を含み、所定のプログラムにより一連の異常検知処理を実行する。すなわち、この異常検知部40は、電子フィルタ30による濾波後の振動信号に対し、その周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっている。
より具体的には、本実施例においては、電子フィルタ30による濾波後の振動信号に対して所定の演算処理を行って実効値を算出し、さらに、その実効値の平均値を求め、この求めた平均値に基づいて、何れかのスライダにおける損傷等の異常の有無を検知する。また、この異常検知部40は、例えば、必要に応じてその異常検知の結果に基づいて上記モータ6の駆動を制御し、例えば直動駆動装置1を緊急停止させるなどの処理を実行する。
【0029】
次に、上記直動駆動装置1の動作、およびその作用・効果について説明する。
この直動駆動装置1は、直動駆動装置1が稼働されると、その作動時の振動を、上記単一の振動センサ10によって随時に測定する(振動測定工程)。そして、その単一の振動センサ10で測定した一の検出点からの振動信号は電子フィルタ30で濾波される(濾波工程)。ここで、この濾波工程では、先に求めた固有振動数に基づき、移動テーブル5−スライダ4の固有振動数以上の振動を除去している。なお、本実施例では、移動テーブル5−スライダ4の固有振動数以上の振動を除去した周波数範囲で、直動駆動装置1の振動速度を7往復分測定している。そして、異常検知部40は、濾波後の振動信号に対して実効値を算出し、さらに、その実効値の平均値を算出し、この求めた平均値に基づいて何れかのスライダにおける損傷等の異常の有無を検知する(異常検知工程)。
【0030】
図8は、上記異常検知部40の出力結果であって、スライダ4の軌道面が、無傷の状態から損傷が発生するまでの、振動速度の実効値の平均値の変化を示すグラフであり、横軸が走行距離、縦軸が振動速度である。
同図からわかるように、本実施例の直動駆動装置1においては、振動速度の平均が0.18m/sの安定した状態で230kmまで走行した後、再び上昇し始めている。そこで、340km走行した時点で、直動案内装置の軌道面を確認したところ、図7での四角で囲んだスライダ4(MR)において、図9に示すように、深さ65〜75μm、幅2.2〜4.6mmの剥離が確認された。これにより、スライダ4(MR)から離れた位置に付設した一の振動センサ10であっても、振動速度の実効値の増加に基づいて、スライダ4(MR)の損傷状況を確認できることが検証された。
【0031】
なお、本発明に係る直動駆動装置の異常検知方法、並びに異常検知装置およびこれを備える直動駆動装置は、上記実施形態ないし実施例に限定されるものではなく、本発明の趣旨を逸脱しなければ種々の変形が可能なことは勿論である。
例えば、本発明に用いられる一の振動センサの付設位置は、図7に示す実施例1に示す位置だけに限定されない。
【0032】
例えば図10〜図12に実施例1の変形例を示す。つまり、図10に示すように、移動テーブル5の、案内レール3と案内レール3との間の位置であってもよいし、また、図11に示すように、移動テーブルの一部をフライス等で加工して、その加工面上に振動センサ10を載せてもよい。また、図12に示すように、移動テーブル5の側面に振動センサ10を貼り付けても良く、このように、振動センサを設置する方向や場所は、直動駆動装置の作動時の振動を測定可能であればどこでもよい。また、振動測定は、振動加速度、振動速度、振動位置のいずれであってもよい。
【0033】
しかし、何れかのスライダにおける損傷等の異常を検知する感度をより高く且つ均一にする上では、上述した一の検出点が、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることは好ましい。以下、一の検出点の、このような設置例について実施例に基づき説明する。
図13に実施例2を示す。
【0034】
同図に示すように、この実施例2では、上記実施例1に対し、上記単一の振動センサ10が、前記一の検出点として、各スライダ4に対して同一距離Dに位置する箇所に付設されている点が異なっている。ここで、同図において符号Gは、各スライダ4の重心の位置を表わしている。なお、一の検出点の設置位置以外の構成については、上記実施例1の構成と同様であるため、その説明を省略する。
【0035】
すなわち、上述した実施例1では、振動センサ10の設置位置を、移動テーブル5の一端の側の下面とした例であったが、この実施例2では、移動テーブル5の中心の下面に設置している。
一の振動センサ10をこのように設置すれば、各スライダ4からの距離をほぼ同一距離に且つほぼ最短距離にすることができるため、上述したように、各スライダ4の振動測定条件を、最良かつ均一にすることができる。そのため、各スライダ4の損傷の進行状況から異常を検知する感度をより高く且つ均一にすることができる。
【0036】
ここで、上記実施例2に示すように、一の振動センサ10を、各スライダ4から同一距離に且つ最短距離に設置できれば、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にする上で好適であるが、複数のスライダの数や、スライダ4と移動テーブル5との相対位置によっては、各スライダ4から同一距離に且つ最短距離に設置することが難しい場合がある。
【0037】
すなわち、例えば図14に示すように、各直動案内装置2に対し、スライダ4がそれぞれ3個ずつ跨設されており、また、スライダ4のスライド方向に対し、移動テーブル5が偏倚して固定されているような場合が想定できる。
そこで、このような場合であれば、同図に示すように、対角線方向の4つのスライダ4については、上記実施例1同様に同一距離D1に位置させ、間に挟まれた上下二つのスライダ4については、同一距離D1よりも短い最短距離D2に位置するように単一の振動センサ1を付設すれば、単一の振動センサ1で複数のスライダ4の軌道面の損傷の進行状況を検知する感度をより高く且つより均等にする上で好適である。
【符号の説明】
【0038】
1 直動駆動装置
2 直動案内装置
3 案内レール
4 スライダ
5 移動テーブル
6 モータ
7 カップリング
8 軸支部
9 ボールねじ
10 振動センサ
20 異常検知装置
30 電子フィルタ
40 異常検知部
【特許請求の範囲】
【請求項1】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する方法であって、
前記直動駆動装置の作動時の振動を一の検出点から測定する振動測定工程と、その振動測定工程で測定した一の検出点からの振動信号を濾波する濾波工程と、その濾波工程を経た前記一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知工程とを含み、
前記濾波工程は、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、前記異常検知工程は、前記濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知することを特徴とする直動駆動装置の異常検知方法。
【請求項2】
前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることを特徴とする請求項1に記載の直動駆動装置の異常検知方法。
【請求項3】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する異常検知装置であって、
前記直動駆動装置の作動時の振動を一の検出点から測定する振動センサと、その一の振動センサで測定した振動信号を濾波するフィルタと、そのフィルタから出力された一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知部とを有し、
前記フィルタは、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去するようになっており、前記異常検知部は、前記フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっていることを特徴とする直動駆動装置の異常検知装置。
【請求項4】
前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることを特徴とする請求項3に記載の直動駆動装置の異常検知装置。
【請求項5】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルと、前記直動案内装置の異常を検知する異常検知装置とを備える直動駆動装置であって、
前記異常検知装置として、請求項3または4に記載の異常検知装置を備えていることを特徴とする直動駆動装置。
【請求項1】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する方法であって、
前記直動駆動装置の作動時の振動を一の検出点から測定する振動測定工程と、その振動測定工程で測定した一の検出点からの振動信号を濾波する濾波工程と、その濾波工程を経た前記一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知工程とを含み、
前記濾波工程は、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去し、前記異常検知工程は、前記濾波工程を経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知することを特徴とする直動駆動装置の異常検知方法。
【請求項2】
前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることを特徴とする請求項1に記載の直動駆動装置の異常検知方法。
【請求項3】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルとを有する直動駆動装置の異常を検知する異常検知装置であって、
前記直動駆動装置の作動時の振動を一の検出点から測定する振動センサと、その一の振動センサで測定した振動信号を濾波するフィルタと、そのフィルタから出力された一の検出点からの振動信号の大きさに基づいて前記複数のスライダの異常を検知する異常検知部とを有し、
前記フィルタは、前記一の検出点からの振動信号のうち、前記移動テーブルを質量とするとともに前記複数のスライダをばねとする、ばね−質量系の固有振動数以上の周波数成分を限って除去するようになっており、前記異常検知部は、前記フィルタを経て得られた振動信号の周波数成分の大きさに基づいて、何れかのスライダにおける損傷等の異常を検知するようになっていることを特徴とする直動駆動装置の異常検知装置。
【請求項4】
前記一の検出点は、各スライダに対して同一距離、または前記同一距離よりも短い距離に位置していることを特徴とする請求項3に記載の直動駆動装置の異常検知装置。
【請求項5】
案内レール上をスライド移動する複数のスライダを有する直動案内装置と、その直動案内装置の複数のスライダに支持される移動テーブルと、前記直動案内装置の異常を検知する異常検知装置とを備える直動駆動装置であって、
前記異常検知装置として、請求項3または4に記載の異常検知装置を備えていることを特徴とする直動駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−60551(P2010−60551A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2009−40365(P2009−40365)
【出願日】平成21年2月24日(2009.2.24)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成21年2月24日(2009.2.24)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]