
相対位置を地中で確認可能なシールドマシン、及び、シールドマシンの相対位置検出方法
【課題】相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高める。
【解決手段】前側スキンプレート19Fにおけるカッター14よりも後方の位置に隔壁20が設けられたシールドマシン1Bであって、隔壁20には、相手方のシールドマシンからシールドマシンの掘進方向に繰り出された小径ボーリング部を内側空間に受け入れ可能な筒状体27が設けられ、この筒状体27には、小径ボーリング部の内側空間における底面方向の位置を計測するためのセンサ板21が設けられている。
【解決手段】前側スキンプレート19Fにおけるカッター14よりも後方の位置に隔壁20が設けられたシールドマシン1Bであって、隔壁20には、相手方のシールドマシンからシールドマシンの掘進方向に繰り出された小径ボーリング部を内側空間に受け入れ可能な筒状体27が設けられ、この筒状体27には、小径ボーリング部の内側空間における底面方向の位置を計測するためのセンサ板21が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシン、及び、シールドマシンの相対位置検出方法に関する。
【背景技術】
【0002】
一対の立抗のそれぞれからシールドマシンを発進させ、構築したセグメント同士を地中で接合する場合には、両シールドマシンの相対位置ずれを許容範囲内に収める必要がある。このため、シールドマシン同士が所定距離まで近づいた際に、シールドマシン同士の相対位置が検出されている。
【0003】
例えば、特許文献1に記載のシールドマシンでは、一方のシールドマシンのカッターフェイスに複数の無線IDタグ(RFID,相対位置検出用のスケール部材)を取り付けておく。そして、ボーリング孔を通じて他方のシールドマシンから繰り出されたアンテナを用いて、無線IDタグに記憶された識別情報を読み出している。
【0004】
また、特許文献2に記載のシールドマシンでは、一方のシールドマシンの隔壁(バルクヘッド)に凹部を形成しておき、ボーリングパイプを通じて他方のシールドマシンから凹部まで計測管を繰り出し、この計測管の側面から超音波を照射させることで、計測管の凹部における位置を計測している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3221320号公報
【特許文献2】特開平4−60095号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載のシールドマシンの場合、回転駆動されるカッターフェイスに無線IDタグが取り付けられているので、地山との摩擦から無線IDタグを保護するための対策を講じる必要がある。また、特許文献2に記載のシールドマシンの場合、凹部に充填された掘削土砂で超音波が反射してしまう虞があり、検出精度を高めることが難しいという問題がある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、その目的は、相対位置検出用のスケール部材の破損を防止しつつも検出精度を高めることにある。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、筒状のスキンプレートと、前記スキンプレートの前端部に配置されたカッターと、前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁とを有するシールドマシンであって、前記隔壁には、相手方のシールドマシンから当該シールドマシンの掘進方向に繰り出されたロッド状部を内側空間に受け入れ可能な有底の筒状凹部が設けられ、前記筒状凹部には、前記ロッド状部の前記内側空間における底面方向の位置を計測するためのスケール部材が設けられていることを特徴とする。
【0009】
本発明によれば、ロッド状部が筒状凹部の内側空間に受け入れられた後、スケール部材によって、ロッド状部の内側空間における底面方向の位置が計測される。筒状凹部の内側空間には土砂や充填材が充填されるので、カッターが回転して地山が掘削されても、内側空間に充填された土砂や充填材は流動せずに安定している。このため、スケール部材の破損を防止することができる。そして、土砂や充填材で保護されたスケール部材によって、ロッド状部の内側空間における位置を計測するので、ロッド状部に対する位置検出精度を高めることができる。
【0010】
上記シールドマシンにおいて、前記スケール部材は、前記筒状凹部の底面に配置された基板と、位置を異ならせた状態で前記基板に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグとを含み、前記ロッド状部の先端部分には、前記無線IDタグに記憶された前記識別情報を読み取るリーダーが設けられていることが好ましい。この構成によれば、リーダーが読み取った無線IDタグの識別情報に基づき、土砂や充填材が内側空間に充填されていても、ロッド状部の位置を計測できる。
【0011】
上記シールドマシンにおいて、前記無線IDタグは、前記リーダーの検出可能範囲よりも狭い間隔となるように、前記基板に対してマトリクス状に取り付けられていることが好ましい。この構成によれば、構成を簡素化しつつもロッド状部の位置を計測できる。
【0012】
上記シールドマシンにおいて、前記筒状凹部は、円筒状部材によって構成され、前記基板は、前記筒状凹部の中心軸を中心に周方向へ回転可能に取り付けられており、前記無線IDタグは、前記基板が回転された際に前記リーダーの検出可能範囲よりも狭い間隔の同心円の軌跡を描くように、前記基板の回転中心から半径方向に位置をずらして取り付けられていることが好ましい。この構成によれば、無線IDタグの配設数を抑えつつもロッド状部の位置を計測できる。
【0013】
上記シールドマシンにおいて、前記スケール部材は、前記筒状凹部の外周部に設けられた挿入孔を通じて、周方向の異なる位置から前記内側空間へ挿入される少なくとも3本の棒状スケールを有していることが好ましい。この構成によれば、それぞれの棒状スケールの深度に基づいてロッド状部の位置を計測できる。
【0014】
上記シールドマシンにおいて、前記ロッド状部は、地山を掘削する小径ボーリング部によって構成され、前記筒状凹部の前記内部空間には、前記小径ボーリング部で掘削可能な充填材が充填されていることが好ましい。この構成によれば、内部空間に充填材が充填されていることから、切削された土砂の内部空間への侵入を抑制できる。これにより、スケール部材を確実に保護できる。
【0015】
また本発明は、第1シールドマシンと第2シールドマシンの相対位置を地中で検出する相対位置検出方法であって、前記第1シールドマシンは、筒状のスキンプレートと、前記スキンプレートの前端部に配置されたカッターと、前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁と、前記隔壁に設けられる有底の筒状凹部と、前記筒状凹部に設けられるスケール部材とを有し、前記第2シールドマシンは、当該第2シールドマシンの掘進方向に繰り出されるロッド状部を有し、前記第2シールドマシンの掘進方向に繰り出された前記ロッド状部を前記筒状凹部の内側空間に受け入れ、前記スケール部材によって前記ロッド状部の前記内側空間における底面方向の位置を計測することで、前記第1シールドマシンと前記第2シールドマシンの相対位置を検出することを特徴とする。
【発明の効果】
【0016】
相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高めることができる。
【図面の簡単な説明】
【0017】
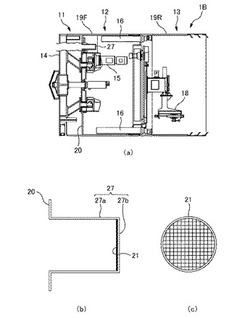
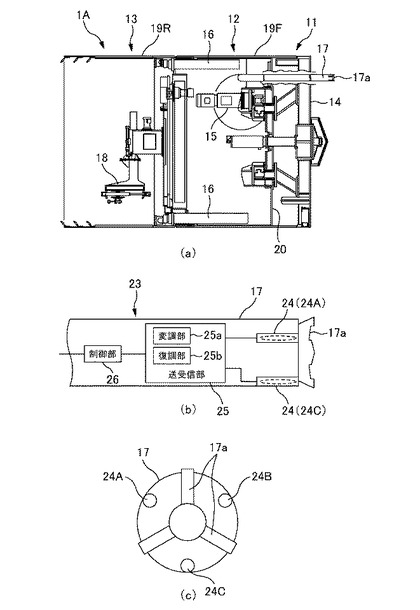
【図1】(a)は、先行シールドマシンの断面図である。(b)は、小径ボーリング部における先端部分の構成を説明するブロック図である。(c)は、小径ボーリング部を先端面側から見た図である。
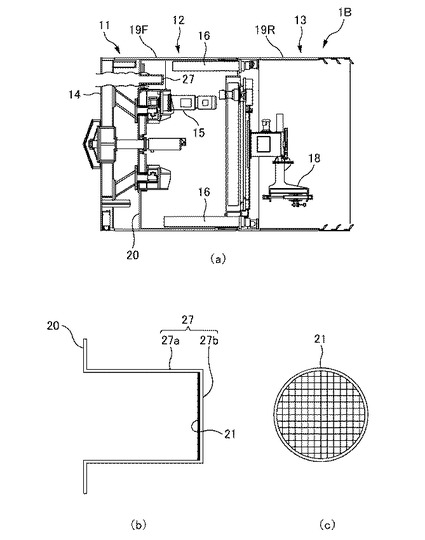
【図2】(a)は、後行シールドマシンの断面図である。(b)は、筒状体の拡大断面図である。(c)は、筒状体底面に設けられたセンサ基板を開口側から見た図である。
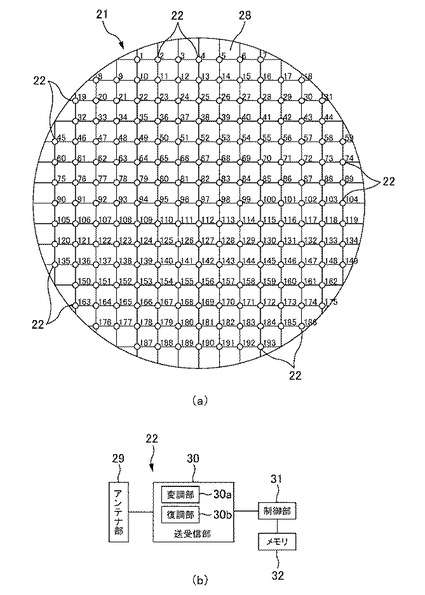
【図3】(a)は、センサ板における無線IDタグの配置を説明する図である。(b)は、無線IDタグの構成を説明するブロック図である。
【図4】シールド工法を説明する図であり、先行シールドマシンが所定位置まで掘進した状態を説明する図である。
【図5】先行シールドマシンから小径ボーリング部を繰り出して地山をボーリングしている状態を説明する図である。
【図6】先行シールドマシンから繰り出した小径ボーリング部の先端部分が筒状体に受け入れられた状態を説明する図である。
【図7】(a)は、筒状体に受け入れられた小径ボーリング部を説明する断面図である。(b)は、筒状体に受け入れられた小径ボーリング部を、筒状体の底面側から見た図である。
【図8】小径ボーリング部に設けた3つのリーダーによる、無線IDタグの検出範囲を説明する概念図である。
【図9】第2実施形態のセンサ基板を説明する図である。
【図10】第2実施形態において、筒状体に受け入れられた小径ボーリング部を説明する断面図である。
【図11】(a)〜(c)は、第3実施形態を説明する図である。
【図12】筒状凹部の変形例を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施形態について図面を用いて詳細に説明する。本実施形態では、一方の立坑から所定方向に掘進する先行シールドマシン1A(図1参照)で設けられたセグメントと、他方の立坑から反対方向に掘進する後行シールドマシン1B(図2参照)で設けられたセグメントとを、地中で接合する場合について説明する。
【0019】
この場合、先行シールドマシン1Aで設けられたセグメントと後行シールドマシン1Bで設けられたセグメントとの間で相対位置ずれを生じる虞がある。このため、後行シールドマシン1Bと先行シールドマシン1Aとが所定距離離れている段階で、相対位置ずれの有無及びずれ量を確認する。
【0020】
まず、先行シールドマシン1Aの構成について説明する。図1(a)に示すように、先行シールドマシン1Aは、フード部11と、ガーダ部12と、テール部13とを有する。フード部11は、地中を掘削するためのカッター14が回転可能な状態で取り付けられる部分である。ガーダ部12は、カッター14の駆動装置15、カッター14により掘削された土砂を排出するための排土機構(図示せず)、先行シールドマシン1Aを前進させるための複数のシールドジャッキ16、及び後行シールドマシン1Bとの相対位置を計測するための小径ボーリング部17が取り付けられた部分である。テール部13はガーダ部12の後方に連結された部分であり、内部にはセグメントを組み立てるためのエレクター18が設置されている。
【0021】
フード部11及びガーダ部12の外周面は、筒状の前側スキンプレート19Fによって区画され、テール部13の外周面は、筒状の後側スキンプレート19Rによって区画されている。そして、後側スキンプレート19Rの前端部は、前側スキンプレート19Fの後端部に嵌め合わされており、両スキンプレート19F,19Rが屈曲可能な状態で取り付けられている。
【0022】
カッター14は、前側スキンプレート19Fの前端部に配置されている。前側スキンプレート19Fにおけるカッター14よりも後方側であってフード部11とガーダ部12の境界には、隔壁20(バルクヘッド)が設けられている。ガーダ部12に配置された小径ボーリング部17はロッド状部に相当し、先行シールドマシン1Aの掘進予定方向に向けて地盤を直線状に掘削する。本実施形態における小径ボーリング部17は、直径が300mm〜350mm程度の円筒状をしており、その先端には回転カッター17aが設けられている。そして、隔壁20に設けられた孔を通じて先行シールドマシン1Aの掘進方向の前方に繰り出される。この小径ボーリング部17の位置ずれを計測することで、先行シールドマシン1Aと後行シールドマシン1Bの位置ずれを事前に認識することができる。
【0023】
この小径ボーリング部17による掘進距離は30m〜50m程度である。この距離は、相対位置ずれが確認された場合に、確認後の掘進で位置ずれを修正可能な距離として定められている。この距離を直線状に掘削するべく、小径ボーリング部17には、レーザー発信器や掘進方向の調整機構が設けられている。すなわち、レーザー発信器から照射されたレーザー光線に沿うように掘進方向を調節しつつ地盤を掘削することで、掘進予定方向に沿って直線状に掘削を進めることができる。
【0024】
本実施形態では、小径ボーリング部17の位置ずれを、後行シールドマシン1Bの所定位置に設けたセンサ板21によって計測している。図3(a)に示すように、このセンサ板21には多数の無線IDタグ22(RFID)が備えられている。これに対応して、小径ボーリング部17の先端部分には、図1(b)に示すように、無線IDタグ22に記憶された識別情報を読み取るためのリーダー23が設けられている。
【0025】
図1(b)に示すように、このリーダー23は、アンテナ部24、送受信部25、及び制御部26を有している。
【0026】
アンテナ部24は、無線IDタグ22に向けて電波を送信するとともに、無線IDタグ22から送信された電波を受信する。図1(c)に示すように、アンテナ部24を構成するアンテナ24A〜24Cは、小径ボーリング部17の外周側付近に、120度間隔で3個設けられている。このため、無線IDタグ22を3箇所で検出することができる。
【0027】
図1(b)に示すように、送受信部25は、アンテナ部24と制御部26の間に介在し、アンテナ部24へ供給する電気信号を生成し、かつ、アンテナ部24が電波を受信することで得られたアナログ信号をデジタル信号に変換する。例示した送受信部25は、デジタル信号を搬送波に重畳することで送信用のアナログ信号を生成する変調部25aと、受信電波に基づくアナログ信号からデジタル信号を取り出す復調部25bとを有している。
【0028】
制御部26は、送受信部25や先行シールドマシン1Aの制御盤(図示せず)と通信する。そして、アンテナ部24からの電波の送信を制御し、受信した電波に含まれる情報(無線IDタグ22の識別情報)を制御盤(図示せず)に送信する。
【0029】
次に、後行シールドマシン1Bの構成について説明する。図2(a)に示すように、後行シールドマシン1Bもまた、先行シールドマシン1Aと同様に構成されている。ここで、先行シールドマシン1Aと同じ構成については同じ符号を付して示し、説明は省略することにする。
【0030】
後行シールドマシン1Bは、隔壁20に筒状体27が設けられている点で、先行シールドマシン1Aと相違している。筒状体27は、隔壁20の表面から後方側(掘進方向と反対側)に窪ませた有底の筒状部分によって構成されている。筒状体27は、先行シールドマシン1Aから繰り出された小径ボーリング部17の先端部分を内側空間に受け入れる部分であり、筒状凹部に相当する。そして、先行シールドマシン1Aの小径ボーリング部17に対応する位置(詳しくは先行シールドマシン1Aのカッター14と後行シールドマシン1Bのカッター14とを向かい合わせた際において、小径ボーリング部17が面対称となる位置)に、隔壁20と一体に設けられている。
【0031】
図2(b)に示すように、筒状体27は、円筒状の側壁部27aと、円板状の底部27bとを有している。側壁部27aの直径は、小径ボーリング部17と筒状体27の相対位置ずれを考慮して小径ボーリング部17の直径よりも大きく定められている。本実施形態では、小径ボーリング部17の直径よりも2倍以上大きな直径800mmに定められている。また、側壁部27aの長さは、小径ボーリング部17の先端部分に設けたリーダー23が収納できる長さに定められている。本実施形態では、1000mm〜1200mm程度の長さに定められている。
【0032】
図2(c)に示すように、底部27bの内側表面には、円形状のセンサ板21が取り付けられている。このセンサ板21は、小径ボーリング部17の内側空間における底面方向の位置を計測するための板状部材であり、スケール部材に相当する。図3(a)に拡大して示すように、センサ板21は、円板状の基板28に、固有の識別情報が記憶された複数の無線IDタグ22をマトリクス状(行列状)に取り付けたものである。
【0033】
図3(b)に示すように、無線IDタグ22は、アンテナ部29と、送受信部30と、制御部31と、メモリ32とを有している。この無線IDタグ22は、いわゆるパッシブタイプであり、リーダー23から送信された電波によって電力を得て動作する。
【0034】
アンテナ部29は、リーダー23から送信された電波を受信し、リーダー23へ向けて電波を送信する。送受信部30は、アンテナ部29と制御部31の間に介在し、アンテナ部29へ供給する電気信号を生成し、アンテナ部29が電波を受信することで得られたアナログ信号をデジタル信号に変換する。例示した送受信部30は、リーダー23と同様に、変調部30aと復調部30bとを有している。
【0035】
制御部31は、送受信部30やメモリ32と通信し、アンテナ部29からの電波の送信を制御し、メモリ32から読み出した無線IDタグ22の識別情報を、送受信部30に出力する。
【0036】
このような構成の無線IDタグ22では、リーダー23から送信された電波を受信すると電力を得て動作を開始する。そして、メモリ32に記憶された識別情報が制御部31で読み出され、送受信部30に出力される。送受信部30では、識別情報を搬送波に重畳することでアナログ信号が生成される。このアナログ信号をアンテナ部29に供給することで電波が送信される。送信された電波は、リーダー23によって読み取られる。すなわち、検出可能範囲に存在する無線IDタグ22の識別情報が認識される。
【0037】
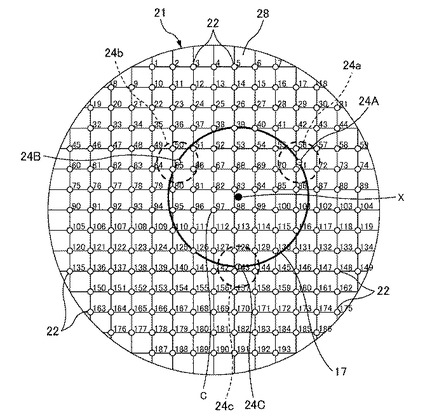
図3(a)に示すように、この例では、識別情報として「1」から「193」までの数字が用いられている。例えば、識別情報「4」を記憶した無線IDタグ22は、図3(a)の配置における最上部の左右中央に配置されており、識別情報「90」を記憶した無線IDタグ22は、同じく上下中央の左端に配置されている。そして、隣り合う無線IDタグ22同士は、リーダー23が有する各アンテナ24A〜24Cの1つで検出可能な範囲よりも狭い間隔に配置されている。
【0038】
このため、小径ボーリング部17の先端面をセンサ板21の表面に近付けてリーダー23を動作させると、各アンテナ24A〜24Cの検出可能範囲に無線IDタグ22が必ず存在することとなり、この検出可能範囲に位置する無線IDタグ22から識別情報を含んだ電波が返信される。この電波をリーダー23の各アンテナ24A〜24Cで受信することで、各アンテナ24A〜24Cの検出可能範囲に存在する無線IDタグ22を識別でき、筒状体27の底面方向における小径ボーリング部17の位置を測定することができる。なお、動作の詳細については後述する。
【0039】
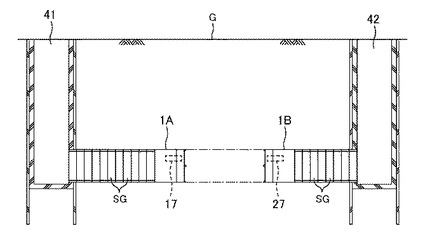
次に、先行シールドマシン1Aと後行シールドマシン1Bを用いたシールド工法について説明する。図4に示すように、このシールド工法では、一方の立坑41から先行シールドマシン1Aを発進させ、地盤Gを掘削するとともにセグメントSGを組み立てる。同様に、他方の立坑42から後行シールドマシン1Bを発進させて地盤Gの掘削等を行う。そして、この例では、後行シールドマシン1Bが筒状凹部やスケール部材等を有する第1シールドマシンに相当し、先行シールドマシン1Aがロッド状部を有する第2シールドマシンに相当する。
【0040】
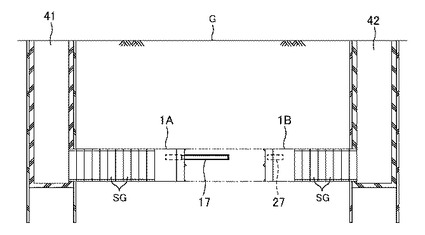
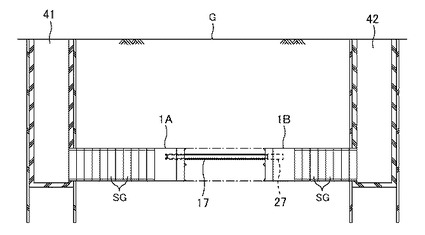
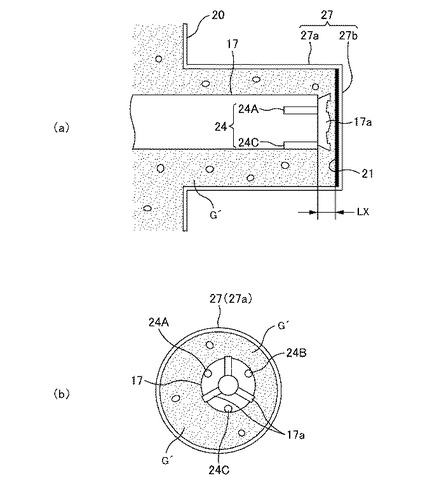
図5に示すように、先行シールドマシン1Aが所定位置まで掘削を完了したならば、小径ボーリング部17による掘削を行う。この掘削は、先行シールドマシン1Aの掘進方向と並行な直線に沿って直線状に行われる。図6に示すように、小径ボーリング部17による掘削は、小径ボーリング部17の先端部分が後行シールドマシン1Bの筒状体27に収まるまで行われる。詳しくは、図7(a)に示すように、小径ボーリング部17の先端からセンサ板21までの距離LXが、リーダー23から送信される電波の到達距離よりも短くなるまで行われる。
【0041】
ここで、図7(a),(b)に示すように、筒状体27には地盤Gの掘削で生じた土砂G´が充填されている。充填された土砂G´は、カッター14が回転しても流動せずに筒状体27の内部空間に留まる。このため、筒状体内の土砂G´は、地盤Gの掘削時においてカッター14で流動する土砂からセンサ板21を保護する充填物として機能する。そして、小径ボーリング部17は、その前端に設けられた回転カッター17aにより、充填された土砂G´を掻き分けて前進する。
【0042】
図7に示す状態でリーダー23の各アンテナ24A〜24Cから電波を発信すると、この電波は各アンテナ24A〜24Cの検出可能範囲内に位置する無線IDタグ22によって受信される。そして、電波を受信した無線IDタグ22は、前述したように識別情報を含んだ電波を返信する。
【0043】
図8に示す例では、識別情報「56」,「71」,「72」の3つの無線IDタグ22がアンテナ24Aの検出可能範囲24aに属し、検出されている。同様に、識別情報「50」,「65」,「66」の3つの無線IDタグ22がアンテナ24Bの検出可能範囲24bに属しており、識別情報「128」,「143」,「144」の3つの無線IDタグ22がアンテナ24Cの検出可能範囲24cに属しており、それぞれ検出されている。
【0044】
各アンテナ24A〜24Cが検出した識別情報は、制御部26を通じて制御盤に送信される。各アンテナ24A〜24Cが設けられている位置は既知であるため、制御盤では、受信した識別情報から、内側空間の底面方向における小径ボーリング部17の位置を求める。
【0045】
例えば、制御盤は、各アンテナ24A〜24Cが検出した識別情報から、対応する無線IDタグ22の位置を認識し、認識した位置をそのアンテナ24A〜24Cの位置とする。このとき、複数の無線IDタグ22の識別情報を受信した場合には、平均位置をそのアンテナ24A〜24Cの位置とする。そして、各アンテナ24A〜24Cの位置を取得したならば、これらの位置から小径ボーリング部17の中心位置を求める。前述したように、本実施形態では、120度間隔で3つのアンテナ24A〜24Cを設けているので、3つのアンテナ24A〜24Cの重心位置を、小径ボーリング部17の中心位置とする。
【0046】
なお、各アンテナ24A〜24Cの位置及び小径ボーリング部17の中心位置は、その都度演算で求めることもできるが、各アンテナ24A〜24Cで検出された識別情報と小径ボーリング部17の中心位置との組み合わせパターンを予め取得しておき、制御盤の記憶装置に記憶させておいてもよい。このようにすると、制御盤では、今回検出された各アンテナ24A〜24Cの識別情報を、記憶装置に記憶されている組み合わせパターンに照合することで、小径ボーリング部17の位置を容易に求めることができる。
【0047】
図8の例では、符号Xで示す小径ボーリング部17の中心軸の位置が求められ、筒状体27の中心軸からのずれ量、すなわち先行シールドマシン1Aと後行シールドマシン1Bとの相対位置ずれ量が算出される。なお、この例では、符号Cで示す無線IDタグ22の配置されている位置が筒状体27の中心軸に相当する。このため、符号Xと符号Cとの差が相対位置ずれ量として算出される。
【0048】
このようにして、先行シールドマシン1Aと後行シールドマシン1Bとの相対位置ずれ量を計測したならば、小径ボーリング部17を先行シールドマシン1Aに格納し、後行シールドマシン1Bによる地盤Gの掘進を再開する。その際、計測した相対位置ずれ量が修正されるように、後行シールドマシン1Bの掘進方向を調整する。
【0049】
以上説明したように、本実施形態のシールド工法によれば、小径ボーリング部17(ロッド状部)が筒状体27の内側空間に受け入れられた際に、リーダー23とセンサ板21によって、内側空間の底面方向における小径ボーリング部17の位置が計測される。その際、筒状体27の内側空間には土砂G´が充填されるので、カッター14が回転して地山が掘削されても、内側空間に充填された土砂G´は流動せずに安定している。このため、センサ板21の破損を防止することができる。そして、無線IDタグ22の検出に際して土砂は影響しないので、超音波によって検出する場合よりも小径ボーリング部17に対する位置検出精度を高めることができる。
【0050】
本実施形態のセンサ板21は、筒状体27の底面に配置された基板28と、位置を異ならせた状態で基板28に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグ22とを含んでいる。そして、小径ボーリング部17の先端部分には、無線IDタグ22に記憶された識別情報を読み取るリーダー23が設けられている。このため、リーダー23が読み取った無線IDタグ22の識別情報に基づき、土砂G´が筒状体27の内側空間に充填されていても、小径ボーリング部17の位置を計測できる。
【0051】
本実施形態の無線IDタグ22は、リーダー23の検出可能範囲24a〜24cよりも狭い間隔となるように、基板28に対してマトリクス状に取り付けられているので、構成を簡素化しつつも小径ボーリング部17の位置を計測できる。
【0052】
次に、本発明の第2実施形態について説明する。この実施形態では、筒状体の底部の構成とセンサ板の構成が第1実施形態と相違する。その他の構成は第1実施形態と同じであるので相違点を中心に説明する。
【0053】
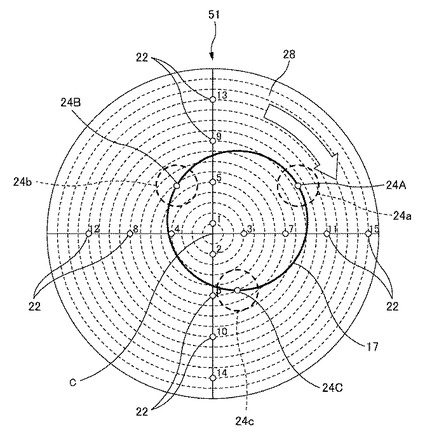
図9は、第2実施形態のセンサ板51を説明する図である。このセンサ板51は、円板状の基板28と、複数の無線IDタグ22とを有している。複数の無線IDタグ22は、符号Cで示す基板28の中心からの距離(すなわち半径方向の距離)が異なるように配置されている。
【0054】
具体的には、識別情報「1」を記憶した無線IDタグ22と基板中心Cとの距離を1ピッチとしたとき、識別情報「2」を記憶した無線IDタグ22は、基板中心Cからの距離が2ピッチに相当する位置に配置されている。同様に、識別情報「3」を記憶した無線IDタグ22は、基板中心Cからの距離が3ピッチとなる位置に配置されている。なお、1ピッチは、リーダー23が有するアンテナ24A〜24Cの検出可能範囲24a〜24cよりも狭い間隔となるように定められている。そして、このセンサ板51は15個の無線IDタグ22を有しているので、識別情報「15」を記憶した無線IDタグ22は、基板中心Cからの距離が15ピッチとなる位置に配置されている。
【0055】
また、各無線IDタグ22は、基板中心Cから90度間隔で周方向に分散された状態で配置されている。具体的には、図9における時計の12時の方向には、識別情報「1」,「5」,「9」,「13」を記憶した無線IDタグ22が配置されている。そして、3時の方向には、識別情報「3」,「7」,「11」,「15」を記憶した無線IDタグ22が配置されている。同様に、6時の方向には、識別情報「2」,「6」,「10」,「14」を記憶した無線IDタグ22が配置され、9時の方向には、識別情報「4」,「8」,「12」を記憶した無線IDタグ22が配置されている。
【0056】
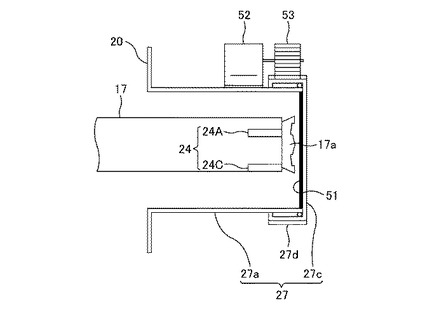
このセンサ板51は、筒状体27の中心軸を中心に周方向へ回転可能な状態で、筒状体27に取り付けられている。例えば、図10に示すように、筒状体27は、円筒状の側壁部27aと、有底筒状の回転蓋体27cとを有している。センサ板51は、基板中心Cが筒状体27の中心軸と重なる位置で、回転蓋体27cの内側表面に貼り付けられている。そして、筒状体27の側壁部27aには駆動モータ52が取り付けられており、駆動モータ52の回転軸には駆動ギア53が取り付けられている。この駆動ギア53は、回転蓋体27cの外周面に形成されたギア27dと噛み合っている。
【0057】
この構成では、駆動モータ52を動作させると、その回転力が駆動ギア53を介して回転蓋体27cに伝達される。これにより、回転蓋体27cが筒状体27の中心軸を中心に周方向へ回転し、回転蓋体27cに設けられたセンサ板51も回転する。なお、駆動モータ52は、センサ板51の回転速度が一定になるように動作が制御される。
【0058】
前述したように、各無線IDタグ22は、基板中心Cからの距離が異なるように配置されている。このため、図9に点線で示すように、基板28の回転に伴って同心円の軌跡を描くように移動する。また、各無線IDタグ22の配設ピッチ(半径方向の間隔)は、リーダー23が有するアンテナ24A〜24Cの検出可能範囲24a〜24cよりも狭いので、少なくとも1つの軌跡が検出可能範囲24a〜24cを通過する。
【0059】
ここで、アンテナ24A〜24Cの検出可能範囲24a〜24cは、複数の無線IDタグ22を検出可能な大きさに定められている。本実施形態では、図9に示すアンテナ24Cの検出可能範囲24cから判るように、最大で5個の無線IDタグ22を検出可能な大きさに定められている。
【0060】
このため、小径ボーリング部17の先端面をセンサ板51の表面に近付けた状態で、リーダー23を動作させつつセンサ板51を1周以上回すと、各アンテナ24A〜24Cの検出可能範囲に無線IDタグ22が必ず存在することとなり、この検出可能範囲に位置する無線IDタグ22から識別情報を含んだ電波が返信される。
【0061】
従って、各アンテナ24A〜24Cがどの無線IDタグ22を検出したかに応じて、小径ボーリング部17の位置を求めることができる。すなわち、各無線IDタグ22は、基板中心Cからの距離が異なるように配置されているので、各アンテナ24A〜24Cで検出された無線IDタグ22の識別情報によって、各アンテナ24A〜24Cの半径方向の位置を認識できる。そして、各アンテナ24A〜24Cにおける半径方向の位置の組み合わせは、小径ボーリング部17の位置に応じて一義にきまる。このため、位置の組み合わせから小径ボーリング部17の位置を求めることができる。
【0062】
なお、この実施形態においても、各アンテナ24A〜24Cで検出された識別情報と小径ボーリング部17の中心位置との組み合わせパターンを予め取得しておき、制御盤の記憶装置に記憶させておくと、処理の簡素化が図れる。
【0063】
なお、本実施形態では、速度が一定となるようにセンサ板51が回転され、検出可能範囲24a〜24cの形状は既知である。このため、検出可能範囲24a〜24cを通過する時間を考慮することで、無線IDタグ22が検出可能範囲24a〜24cの中央を通過したか、端を通過したかが判る。その結果、より精度の高い位置検出が行える。
【0064】
このように、本実施形態では、センサ板51(基板28)が回転された際にリーダー23の検出可能範囲24a〜24cよりも狭い間隔の同心円の軌跡を描くように、各無線IDタグ22が、基板28の回転中心から半径方向に位置をずらして取り付けられているので、第1実施形態よりも少ない数の無線IDタグ22を用いて小径ボーリング部17の位置を計測できる。
【0065】
次に、本発明の第3実施形態について説明する。この実施形態では、棒状スケール61を追加した点が第1実施形態と相違する。その他の構成は第1実施形態と同じであるので相違点を中心に説明する。
【0066】
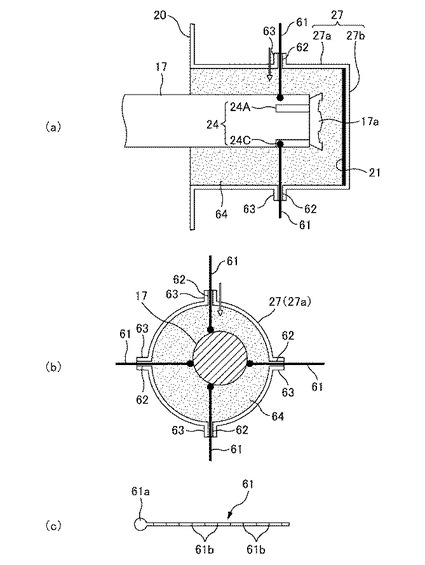
図11(a),(b)に示すように、第3実施形態では、棒状スケール61を挿入するための挿入孔62を、筒状体27の側壁部27aに設けている。図示の例では、周方向に90度間隔で4本の棒状スケール61が挿入されている。棒状スケール61は、スケール部材の一種であり、図11(c)に示すように、先端に当接用の球形部61aが設けられた棒状部材であり、側面には挿入深さを示す目盛り61bが刻印されている。
【0067】
各棒状スケール61は、筒状体27の中心軸に向かって移動可能な向きに支持されている。このため、側壁部27aの外周面には円筒状のガイドリブ63を突設し、挿入孔62を半径方向に延長している。また、球形部61aは、挿入孔62の直径よりも大きな直径に設けられている。なお、棒状スケール61と挿入孔62の間には止水ゴム等の止水材が設けられており、挿入孔62を通じた泥土の噴出が生じないように構成されている。
【0068】
また、本実施形態では、筒状体27の内部空間に充填材64を充填している。この充填材64は、カッター14で掘削された土砂の筒状体27への流入を防ぎ、センサ板21や棒状スケール61を保護するためのクッション材として機能する。なお、充填材64は、土砂の流入は防ぐが、小径ボーリング部17の侵入は許容することが求められる。このため、充填材64としては、止水性を有するとともに小径ボーリング部17で掘削可能な、発泡樹脂が好適に用いられる。
【0069】
この第3実施形態では、第1実施形態と同様に、小径ボーリング部17の先端に設けたリーダー23によって、センサ板21に設けられたマトリクス状の無線IDタグ22が検出され、小径ボーリング部17の位置が計測される。そして、棒状スケール61を筒状体27の中心軸側に、小径ボーリング部17に当接するまで押し込むことで、小径ボーリング部17の位置を計測することができる。すなわち、各棒状スケール61の押し込み量(球形部61aの当接位置)は、小径ボーリング部17の位置に応じて定まる。このため、各棒状スケール61の押し込み量に基づいて小径ボーリング部17の位置を計測できる。
【0070】
本実施形態では、スケール部材が、筒状体27の外周部に設けられた挿入孔62を通じて、周方向の異なる位置から内側空間へ挿入される4本の棒状スケール61によって構成されているので、それぞれの棒状スケール61の深度に基づいて小径ボーリング部17の位置を計測できる。
【0071】
また、本実施形態では、2種類のスケール部材、すなわちセンサ板21と棒状スケール61を設けているので、センサ板21による計測結果を棒状スケール61によって確認することができる。さらに、センサ板21やリーダー23が万一故障してしまったとしても、棒状スケール61を代用して計測することができる。
【0072】
なお、本実施形態では、90度間隔で配置された4本の棒状スケール61を用いたが、この構成に限定されない。棒状スケール61は少なくとも3本用いればよく、配設間隔も等間隔でなくてもよい。
【0073】
以上の実施形態の説明は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得ると共に本発明にはその等価物が含まれる。例えば、次のように構成してもよい。
【0074】
前述した各実施形態の技術要素は、組み合わせて適用することができる。例えば、第3実施形態の棒状スケール61を第2実施形態に適用してもよい。また、充填材64を第1実施形態や第2実施形態に適用してもよい。さらに、第3実施形態の棒状スケール61のみでスケール部材を構成してもよい。
【0075】
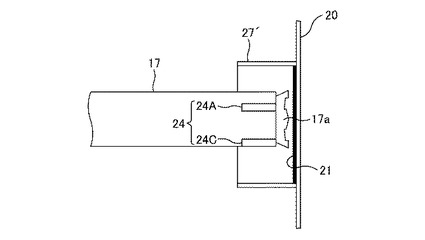
また、第1実施形態の筒状体27に関し、隔壁20から窪ませたものを例示したが、この構成に限定されるものではない。例えば、図12に示すように、底面にセンサ板21を取り付けた筒状体27´を、隔壁20の表面に取り付けてもよい。この筒状体27´も筒状凹部に相当する。
【0076】
さらに、筒状凹部に相当する筒状体27,27´に関し、円筒状のものを例示したが、この構成に限定されるものではない。例えば、断面形状が四角形や六角形の角筒によって構成してもよい。
【0077】
前述の各実施形態では、先行シールドマシン1Aに小径ボーリング部17(ロッド状部)を設け、後行シールドマシン1Bに筒状体27や無線IDタグ22(スケール部材)等を設けた構成を例示したが、この構成に限定されるものではない。すなわち、一対のシールドマシン1A,1Bの一方に小径ボーリング部17が設けられ、他方に筒状体27(筒状凹部)が設けられていればよい。従って、先行シールドマシン1Aに筒状体27等を設け、後行シールドマシン1Bに小径ボーリング部17を設けてもよい。この場合、先行シールドマシン1Aが筒状凹部やスケール部材等を有する第1シールドマシンに相当し、後行シールドマシン1Bがロッド状部を有する第2シールドマシンに相当する。
【0078】
前述の各実施形態では、小径ボーリング部17の先端に無線IDタグ22のリーダー23を取り付けた構成を例示したが、この構成に限定されない。例えば、リーダー23を計測管の先端に設けてもよい。この場合、計測管がロッド状部に相当する。そして、計測に際しては、各シールドマシン1A,1Bの間を連通する連通管を予め地中に形成した後、この連通管の内部空間を通じて計測管を繰り出すようにすればよい。
【0079】
第1実施形態の無線IDタグ22に関し、基板28にマトリクス状に配置したものを例示したが、この構成に限定されない。例えば、ハニカム形状の各頂部に無線IDタグ22を配置してもよい。要するに、固有の識別情報が記憶された無線IDタグ22を、基板28の異なる位置に配置すればよい。
【符号の説明】
【0080】
1A…先行シールドマシン,1B…後行シールドマシン,11…フード部,12…ガーダ部,13…テール部,14…カッター,15…カッターの駆動装置,16…シールドジャッキ,17…小径ボーリング部(17a…回転カッター),18…エレクター,19F…前側スキンプレート,19R…後側スキンプレート,20…隔壁,21…センサ板,22…無線IDタグ,23…リーダー,24…リーダーのアンテナ部(24A〜24C…アンテナ),25…リーダーの送受信部(25a…変調部,25b…復調部),26…リーダーの制御部,27…筒状体(27a…側壁部,27b…底部,27c…回転蓋体,27d…ギア),28…センサ板の基板,29…無線IDタグのアンテナ部,30…無線IDタグの送受信部,31…無線IDタグの制御部,32…無線IDタグのメモリ,41…一方の立坑,42…他方の立坑,51…センサ板,52…駆動モータ,53…駆動ギア,61…棒状スケール(61a…球形部,61b…目盛り),62…挿入孔,63…ガイドリブ,64…充填材,G…地盤,G´…土砂,SG…セグメント
【技術分野】
【0001】
本発明は、相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシン、及び、シールドマシンの相対位置検出方法に関する。
【背景技術】
【0002】
一対の立抗のそれぞれからシールドマシンを発進させ、構築したセグメント同士を地中で接合する場合には、両シールドマシンの相対位置ずれを許容範囲内に収める必要がある。このため、シールドマシン同士が所定距離まで近づいた際に、シールドマシン同士の相対位置が検出されている。
【0003】
例えば、特許文献1に記載のシールドマシンでは、一方のシールドマシンのカッターフェイスに複数の無線IDタグ(RFID,相対位置検出用のスケール部材)を取り付けておく。そして、ボーリング孔を通じて他方のシールドマシンから繰り出されたアンテナを用いて、無線IDタグに記憶された識別情報を読み出している。
【0004】
また、特許文献2に記載のシールドマシンでは、一方のシールドマシンの隔壁(バルクヘッド)に凹部を形成しておき、ボーリングパイプを通じて他方のシールドマシンから凹部まで計測管を繰り出し、この計測管の側面から超音波を照射させることで、計測管の凹部における位置を計測している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3221320号公報
【特許文献2】特開平4−60095号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載のシールドマシンの場合、回転駆動されるカッターフェイスに無線IDタグが取り付けられているので、地山との摩擦から無線IDタグを保護するための対策を講じる必要がある。また、特許文献2に記載のシールドマシンの場合、凹部に充填された掘削土砂で超音波が反射してしまう虞があり、検出精度を高めることが難しいという問題がある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、その目的は、相対位置検出用のスケール部材の破損を防止しつつも検出精度を高めることにある。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、筒状のスキンプレートと、前記スキンプレートの前端部に配置されたカッターと、前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁とを有するシールドマシンであって、前記隔壁には、相手方のシールドマシンから当該シールドマシンの掘進方向に繰り出されたロッド状部を内側空間に受け入れ可能な有底の筒状凹部が設けられ、前記筒状凹部には、前記ロッド状部の前記内側空間における底面方向の位置を計測するためのスケール部材が設けられていることを特徴とする。
【0009】
本発明によれば、ロッド状部が筒状凹部の内側空間に受け入れられた後、スケール部材によって、ロッド状部の内側空間における底面方向の位置が計測される。筒状凹部の内側空間には土砂や充填材が充填されるので、カッターが回転して地山が掘削されても、内側空間に充填された土砂や充填材は流動せずに安定している。このため、スケール部材の破損を防止することができる。そして、土砂や充填材で保護されたスケール部材によって、ロッド状部の内側空間における位置を計測するので、ロッド状部に対する位置検出精度を高めることができる。
【0010】
上記シールドマシンにおいて、前記スケール部材は、前記筒状凹部の底面に配置された基板と、位置を異ならせた状態で前記基板に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグとを含み、前記ロッド状部の先端部分には、前記無線IDタグに記憶された前記識別情報を読み取るリーダーが設けられていることが好ましい。この構成によれば、リーダーが読み取った無線IDタグの識別情報に基づき、土砂や充填材が内側空間に充填されていても、ロッド状部の位置を計測できる。
【0011】
上記シールドマシンにおいて、前記無線IDタグは、前記リーダーの検出可能範囲よりも狭い間隔となるように、前記基板に対してマトリクス状に取り付けられていることが好ましい。この構成によれば、構成を簡素化しつつもロッド状部の位置を計測できる。
【0012】
上記シールドマシンにおいて、前記筒状凹部は、円筒状部材によって構成され、前記基板は、前記筒状凹部の中心軸を中心に周方向へ回転可能に取り付けられており、前記無線IDタグは、前記基板が回転された際に前記リーダーの検出可能範囲よりも狭い間隔の同心円の軌跡を描くように、前記基板の回転中心から半径方向に位置をずらして取り付けられていることが好ましい。この構成によれば、無線IDタグの配設数を抑えつつもロッド状部の位置を計測できる。
【0013】
上記シールドマシンにおいて、前記スケール部材は、前記筒状凹部の外周部に設けられた挿入孔を通じて、周方向の異なる位置から前記内側空間へ挿入される少なくとも3本の棒状スケールを有していることが好ましい。この構成によれば、それぞれの棒状スケールの深度に基づいてロッド状部の位置を計測できる。
【0014】
上記シールドマシンにおいて、前記ロッド状部は、地山を掘削する小径ボーリング部によって構成され、前記筒状凹部の前記内部空間には、前記小径ボーリング部で掘削可能な充填材が充填されていることが好ましい。この構成によれば、内部空間に充填材が充填されていることから、切削された土砂の内部空間への侵入を抑制できる。これにより、スケール部材を確実に保護できる。
【0015】
また本発明は、第1シールドマシンと第2シールドマシンの相対位置を地中で検出する相対位置検出方法であって、前記第1シールドマシンは、筒状のスキンプレートと、前記スキンプレートの前端部に配置されたカッターと、前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁と、前記隔壁に設けられる有底の筒状凹部と、前記筒状凹部に設けられるスケール部材とを有し、前記第2シールドマシンは、当該第2シールドマシンの掘進方向に繰り出されるロッド状部を有し、前記第2シールドマシンの掘進方向に繰り出された前記ロッド状部を前記筒状凹部の内側空間に受け入れ、前記スケール部材によって前記ロッド状部の前記内側空間における底面方向の位置を計測することで、前記第1シールドマシンと前記第2シールドマシンの相対位置を検出することを特徴とする。
【発明の効果】
【0016】
相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高めることができる。
【図面の簡単な説明】
【0017】
【図1】(a)は、先行シールドマシンの断面図である。(b)は、小径ボーリング部における先端部分の構成を説明するブロック図である。(c)は、小径ボーリング部を先端面側から見た図である。
【図2】(a)は、後行シールドマシンの断面図である。(b)は、筒状体の拡大断面図である。(c)は、筒状体底面に設けられたセンサ基板を開口側から見た図である。
【図3】(a)は、センサ板における無線IDタグの配置を説明する図である。(b)は、無線IDタグの構成を説明するブロック図である。
【図4】シールド工法を説明する図であり、先行シールドマシンが所定位置まで掘進した状態を説明する図である。
【図5】先行シールドマシンから小径ボーリング部を繰り出して地山をボーリングしている状態を説明する図である。
【図6】先行シールドマシンから繰り出した小径ボーリング部の先端部分が筒状体に受け入れられた状態を説明する図である。
【図7】(a)は、筒状体に受け入れられた小径ボーリング部を説明する断面図である。(b)は、筒状体に受け入れられた小径ボーリング部を、筒状体の底面側から見た図である。
【図8】小径ボーリング部に設けた3つのリーダーによる、無線IDタグの検出範囲を説明する概念図である。
【図9】第2実施形態のセンサ基板を説明する図である。
【図10】第2実施形態において、筒状体に受け入れられた小径ボーリング部を説明する断面図である。
【図11】(a)〜(c)は、第3実施形態を説明する図である。
【図12】筒状凹部の変形例を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施形態について図面を用いて詳細に説明する。本実施形態では、一方の立坑から所定方向に掘進する先行シールドマシン1A(図1参照)で設けられたセグメントと、他方の立坑から反対方向に掘進する後行シールドマシン1B(図2参照)で設けられたセグメントとを、地中で接合する場合について説明する。
【0019】
この場合、先行シールドマシン1Aで設けられたセグメントと後行シールドマシン1Bで設けられたセグメントとの間で相対位置ずれを生じる虞がある。このため、後行シールドマシン1Bと先行シールドマシン1Aとが所定距離離れている段階で、相対位置ずれの有無及びずれ量を確認する。
【0020】
まず、先行シールドマシン1Aの構成について説明する。図1(a)に示すように、先行シールドマシン1Aは、フード部11と、ガーダ部12と、テール部13とを有する。フード部11は、地中を掘削するためのカッター14が回転可能な状態で取り付けられる部分である。ガーダ部12は、カッター14の駆動装置15、カッター14により掘削された土砂を排出するための排土機構(図示せず)、先行シールドマシン1Aを前進させるための複数のシールドジャッキ16、及び後行シールドマシン1Bとの相対位置を計測するための小径ボーリング部17が取り付けられた部分である。テール部13はガーダ部12の後方に連結された部分であり、内部にはセグメントを組み立てるためのエレクター18が設置されている。
【0021】
フード部11及びガーダ部12の外周面は、筒状の前側スキンプレート19Fによって区画され、テール部13の外周面は、筒状の後側スキンプレート19Rによって区画されている。そして、後側スキンプレート19Rの前端部は、前側スキンプレート19Fの後端部に嵌め合わされており、両スキンプレート19F,19Rが屈曲可能な状態で取り付けられている。
【0022】
カッター14は、前側スキンプレート19Fの前端部に配置されている。前側スキンプレート19Fにおけるカッター14よりも後方側であってフード部11とガーダ部12の境界には、隔壁20(バルクヘッド)が設けられている。ガーダ部12に配置された小径ボーリング部17はロッド状部に相当し、先行シールドマシン1Aの掘進予定方向に向けて地盤を直線状に掘削する。本実施形態における小径ボーリング部17は、直径が300mm〜350mm程度の円筒状をしており、その先端には回転カッター17aが設けられている。そして、隔壁20に設けられた孔を通じて先行シールドマシン1Aの掘進方向の前方に繰り出される。この小径ボーリング部17の位置ずれを計測することで、先行シールドマシン1Aと後行シールドマシン1Bの位置ずれを事前に認識することができる。
【0023】
この小径ボーリング部17による掘進距離は30m〜50m程度である。この距離は、相対位置ずれが確認された場合に、確認後の掘進で位置ずれを修正可能な距離として定められている。この距離を直線状に掘削するべく、小径ボーリング部17には、レーザー発信器や掘進方向の調整機構が設けられている。すなわち、レーザー発信器から照射されたレーザー光線に沿うように掘進方向を調節しつつ地盤を掘削することで、掘進予定方向に沿って直線状に掘削を進めることができる。
【0024】
本実施形態では、小径ボーリング部17の位置ずれを、後行シールドマシン1Bの所定位置に設けたセンサ板21によって計測している。図3(a)に示すように、このセンサ板21には多数の無線IDタグ22(RFID)が備えられている。これに対応して、小径ボーリング部17の先端部分には、図1(b)に示すように、無線IDタグ22に記憶された識別情報を読み取るためのリーダー23が設けられている。
【0025】
図1(b)に示すように、このリーダー23は、アンテナ部24、送受信部25、及び制御部26を有している。
【0026】
アンテナ部24は、無線IDタグ22に向けて電波を送信するとともに、無線IDタグ22から送信された電波を受信する。図1(c)に示すように、アンテナ部24を構成するアンテナ24A〜24Cは、小径ボーリング部17の外周側付近に、120度間隔で3個設けられている。このため、無線IDタグ22を3箇所で検出することができる。
【0027】
図1(b)に示すように、送受信部25は、アンテナ部24と制御部26の間に介在し、アンテナ部24へ供給する電気信号を生成し、かつ、アンテナ部24が電波を受信することで得られたアナログ信号をデジタル信号に変換する。例示した送受信部25は、デジタル信号を搬送波に重畳することで送信用のアナログ信号を生成する変調部25aと、受信電波に基づくアナログ信号からデジタル信号を取り出す復調部25bとを有している。
【0028】
制御部26は、送受信部25や先行シールドマシン1Aの制御盤(図示せず)と通信する。そして、アンテナ部24からの電波の送信を制御し、受信した電波に含まれる情報(無線IDタグ22の識別情報)を制御盤(図示せず)に送信する。
【0029】
次に、後行シールドマシン1Bの構成について説明する。図2(a)に示すように、後行シールドマシン1Bもまた、先行シールドマシン1Aと同様に構成されている。ここで、先行シールドマシン1Aと同じ構成については同じ符号を付して示し、説明は省略することにする。
【0030】
後行シールドマシン1Bは、隔壁20に筒状体27が設けられている点で、先行シールドマシン1Aと相違している。筒状体27は、隔壁20の表面から後方側(掘進方向と反対側)に窪ませた有底の筒状部分によって構成されている。筒状体27は、先行シールドマシン1Aから繰り出された小径ボーリング部17の先端部分を内側空間に受け入れる部分であり、筒状凹部に相当する。そして、先行シールドマシン1Aの小径ボーリング部17に対応する位置(詳しくは先行シールドマシン1Aのカッター14と後行シールドマシン1Bのカッター14とを向かい合わせた際において、小径ボーリング部17が面対称となる位置)に、隔壁20と一体に設けられている。
【0031】
図2(b)に示すように、筒状体27は、円筒状の側壁部27aと、円板状の底部27bとを有している。側壁部27aの直径は、小径ボーリング部17と筒状体27の相対位置ずれを考慮して小径ボーリング部17の直径よりも大きく定められている。本実施形態では、小径ボーリング部17の直径よりも2倍以上大きな直径800mmに定められている。また、側壁部27aの長さは、小径ボーリング部17の先端部分に設けたリーダー23が収納できる長さに定められている。本実施形態では、1000mm〜1200mm程度の長さに定められている。
【0032】
図2(c)に示すように、底部27bの内側表面には、円形状のセンサ板21が取り付けられている。このセンサ板21は、小径ボーリング部17の内側空間における底面方向の位置を計測するための板状部材であり、スケール部材に相当する。図3(a)に拡大して示すように、センサ板21は、円板状の基板28に、固有の識別情報が記憶された複数の無線IDタグ22をマトリクス状(行列状)に取り付けたものである。
【0033】
図3(b)に示すように、無線IDタグ22は、アンテナ部29と、送受信部30と、制御部31と、メモリ32とを有している。この無線IDタグ22は、いわゆるパッシブタイプであり、リーダー23から送信された電波によって電力を得て動作する。
【0034】
アンテナ部29は、リーダー23から送信された電波を受信し、リーダー23へ向けて電波を送信する。送受信部30は、アンテナ部29と制御部31の間に介在し、アンテナ部29へ供給する電気信号を生成し、アンテナ部29が電波を受信することで得られたアナログ信号をデジタル信号に変換する。例示した送受信部30は、リーダー23と同様に、変調部30aと復調部30bとを有している。
【0035】
制御部31は、送受信部30やメモリ32と通信し、アンテナ部29からの電波の送信を制御し、メモリ32から読み出した無線IDタグ22の識別情報を、送受信部30に出力する。
【0036】
このような構成の無線IDタグ22では、リーダー23から送信された電波を受信すると電力を得て動作を開始する。そして、メモリ32に記憶された識別情報が制御部31で読み出され、送受信部30に出力される。送受信部30では、識別情報を搬送波に重畳することでアナログ信号が生成される。このアナログ信号をアンテナ部29に供給することで電波が送信される。送信された電波は、リーダー23によって読み取られる。すなわち、検出可能範囲に存在する無線IDタグ22の識別情報が認識される。
【0037】
図3(a)に示すように、この例では、識別情報として「1」から「193」までの数字が用いられている。例えば、識別情報「4」を記憶した無線IDタグ22は、図3(a)の配置における最上部の左右中央に配置されており、識別情報「90」を記憶した無線IDタグ22は、同じく上下中央の左端に配置されている。そして、隣り合う無線IDタグ22同士は、リーダー23が有する各アンテナ24A〜24Cの1つで検出可能な範囲よりも狭い間隔に配置されている。
【0038】
このため、小径ボーリング部17の先端面をセンサ板21の表面に近付けてリーダー23を動作させると、各アンテナ24A〜24Cの検出可能範囲に無線IDタグ22が必ず存在することとなり、この検出可能範囲に位置する無線IDタグ22から識別情報を含んだ電波が返信される。この電波をリーダー23の各アンテナ24A〜24Cで受信することで、各アンテナ24A〜24Cの検出可能範囲に存在する無線IDタグ22を識別でき、筒状体27の底面方向における小径ボーリング部17の位置を測定することができる。なお、動作の詳細については後述する。
【0039】
次に、先行シールドマシン1Aと後行シールドマシン1Bを用いたシールド工法について説明する。図4に示すように、このシールド工法では、一方の立坑41から先行シールドマシン1Aを発進させ、地盤Gを掘削するとともにセグメントSGを組み立てる。同様に、他方の立坑42から後行シールドマシン1Bを発進させて地盤Gの掘削等を行う。そして、この例では、後行シールドマシン1Bが筒状凹部やスケール部材等を有する第1シールドマシンに相当し、先行シールドマシン1Aがロッド状部を有する第2シールドマシンに相当する。
【0040】
図5に示すように、先行シールドマシン1Aが所定位置まで掘削を完了したならば、小径ボーリング部17による掘削を行う。この掘削は、先行シールドマシン1Aの掘進方向と並行な直線に沿って直線状に行われる。図6に示すように、小径ボーリング部17による掘削は、小径ボーリング部17の先端部分が後行シールドマシン1Bの筒状体27に収まるまで行われる。詳しくは、図7(a)に示すように、小径ボーリング部17の先端からセンサ板21までの距離LXが、リーダー23から送信される電波の到達距離よりも短くなるまで行われる。
【0041】
ここで、図7(a),(b)に示すように、筒状体27には地盤Gの掘削で生じた土砂G´が充填されている。充填された土砂G´は、カッター14が回転しても流動せずに筒状体27の内部空間に留まる。このため、筒状体内の土砂G´は、地盤Gの掘削時においてカッター14で流動する土砂からセンサ板21を保護する充填物として機能する。そして、小径ボーリング部17は、その前端に設けられた回転カッター17aにより、充填された土砂G´を掻き分けて前進する。
【0042】
図7に示す状態でリーダー23の各アンテナ24A〜24Cから電波を発信すると、この電波は各アンテナ24A〜24Cの検出可能範囲内に位置する無線IDタグ22によって受信される。そして、電波を受信した無線IDタグ22は、前述したように識別情報を含んだ電波を返信する。
【0043】
図8に示す例では、識別情報「56」,「71」,「72」の3つの無線IDタグ22がアンテナ24Aの検出可能範囲24aに属し、検出されている。同様に、識別情報「50」,「65」,「66」の3つの無線IDタグ22がアンテナ24Bの検出可能範囲24bに属しており、識別情報「128」,「143」,「144」の3つの無線IDタグ22がアンテナ24Cの検出可能範囲24cに属しており、それぞれ検出されている。
【0044】
各アンテナ24A〜24Cが検出した識別情報は、制御部26を通じて制御盤に送信される。各アンテナ24A〜24Cが設けられている位置は既知であるため、制御盤では、受信した識別情報から、内側空間の底面方向における小径ボーリング部17の位置を求める。
【0045】
例えば、制御盤は、各アンテナ24A〜24Cが検出した識別情報から、対応する無線IDタグ22の位置を認識し、認識した位置をそのアンテナ24A〜24Cの位置とする。このとき、複数の無線IDタグ22の識別情報を受信した場合には、平均位置をそのアンテナ24A〜24Cの位置とする。そして、各アンテナ24A〜24Cの位置を取得したならば、これらの位置から小径ボーリング部17の中心位置を求める。前述したように、本実施形態では、120度間隔で3つのアンテナ24A〜24Cを設けているので、3つのアンテナ24A〜24Cの重心位置を、小径ボーリング部17の中心位置とする。
【0046】
なお、各アンテナ24A〜24Cの位置及び小径ボーリング部17の中心位置は、その都度演算で求めることもできるが、各アンテナ24A〜24Cで検出された識別情報と小径ボーリング部17の中心位置との組み合わせパターンを予め取得しておき、制御盤の記憶装置に記憶させておいてもよい。このようにすると、制御盤では、今回検出された各アンテナ24A〜24Cの識別情報を、記憶装置に記憶されている組み合わせパターンに照合することで、小径ボーリング部17の位置を容易に求めることができる。
【0047】
図8の例では、符号Xで示す小径ボーリング部17の中心軸の位置が求められ、筒状体27の中心軸からのずれ量、すなわち先行シールドマシン1Aと後行シールドマシン1Bとの相対位置ずれ量が算出される。なお、この例では、符号Cで示す無線IDタグ22の配置されている位置が筒状体27の中心軸に相当する。このため、符号Xと符号Cとの差が相対位置ずれ量として算出される。
【0048】
このようにして、先行シールドマシン1Aと後行シールドマシン1Bとの相対位置ずれ量を計測したならば、小径ボーリング部17を先行シールドマシン1Aに格納し、後行シールドマシン1Bによる地盤Gの掘進を再開する。その際、計測した相対位置ずれ量が修正されるように、後行シールドマシン1Bの掘進方向を調整する。
【0049】
以上説明したように、本実施形態のシールド工法によれば、小径ボーリング部17(ロッド状部)が筒状体27の内側空間に受け入れられた際に、リーダー23とセンサ板21によって、内側空間の底面方向における小径ボーリング部17の位置が計測される。その際、筒状体27の内側空間には土砂G´が充填されるので、カッター14が回転して地山が掘削されても、内側空間に充填された土砂G´は流動せずに安定している。このため、センサ板21の破損を防止することができる。そして、無線IDタグ22の検出に際して土砂は影響しないので、超音波によって検出する場合よりも小径ボーリング部17に対する位置検出精度を高めることができる。
【0050】
本実施形態のセンサ板21は、筒状体27の底面に配置された基板28と、位置を異ならせた状態で基板28に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグ22とを含んでいる。そして、小径ボーリング部17の先端部分には、無線IDタグ22に記憶された識別情報を読み取るリーダー23が設けられている。このため、リーダー23が読み取った無線IDタグ22の識別情報に基づき、土砂G´が筒状体27の内側空間に充填されていても、小径ボーリング部17の位置を計測できる。
【0051】
本実施形態の無線IDタグ22は、リーダー23の検出可能範囲24a〜24cよりも狭い間隔となるように、基板28に対してマトリクス状に取り付けられているので、構成を簡素化しつつも小径ボーリング部17の位置を計測できる。
【0052】
次に、本発明の第2実施形態について説明する。この実施形態では、筒状体の底部の構成とセンサ板の構成が第1実施形態と相違する。その他の構成は第1実施形態と同じであるので相違点を中心に説明する。
【0053】
図9は、第2実施形態のセンサ板51を説明する図である。このセンサ板51は、円板状の基板28と、複数の無線IDタグ22とを有している。複数の無線IDタグ22は、符号Cで示す基板28の中心からの距離(すなわち半径方向の距離)が異なるように配置されている。
【0054】
具体的には、識別情報「1」を記憶した無線IDタグ22と基板中心Cとの距離を1ピッチとしたとき、識別情報「2」を記憶した無線IDタグ22は、基板中心Cからの距離が2ピッチに相当する位置に配置されている。同様に、識別情報「3」を記憶した無線IDタグ22は、基板中心Cからの距離が3ピッチとなる位置に配置されている。なお、1ピッチは、リーダー23が有するアンテナ24A〜24Cの検出可能範囲24a〜24cよりも狭い間隔となるように定められている。そして、このセンサ板51は15個の無線IDタグ22を有しているので、識別情報「15」を記憶した無線IDタグ22は、基板中心Cからの距離が15ピッチとなる位置に配置されている。
【0055】
また、各無線IDタグ22は、基板中心Cから90度間隔で周方向に分散された状態で配置されている。具体的には、図9における時計の12時の方向には、識別情報「1」,「5」,「9」,「13」を記憶した無線IDタグ22が配置されている。そして、3時の方向には、識別情報「3」,「7」,「11」,「15」を記憶した無線IDタグ22が配置されている。同様に、6時の方向には、識別情報「2」,「6」,「10」,「14」を記憶した無線IDタグ22が配置され、9時の方向には、識別情報「4」,「8」,「12」を記憶した無線IDタグ22が配置されている。
【0056】
このセンサ板51は、筒状体27の中心軸を中心に周方向へ回転可能な状態で、筒状体27に取り付けられている。例えば、図10に示すように、筒状体27は、円筒状の側壁部27aと、有底筒状の回転蓋体27cとを有している。センサ板51は、基板中心Cが筒状体27の中心軸と重なる位置で、回転蓋体27cの内側表面に貼り付けられている。そして、筒状体27の側壁部27aには駆動モータ52が取り付けられており、駆動モータ52の回転軸には駆動ギア53が取り付けられている。この駆動ギア53は、回転蓋体27cの外周面に形成されたギア27dと噛み合っている。
【0057】
この構成では、駆動モータ52を動作させると、その回転力が駆動ギア53を介して回転蓋体27cに伝達される。これにより、回転蓋体27cが筒状体27の中心軸を中心に周方向へ回転し、回転蓋体27cに設けられたセンサ板51も回転する。なお、駆動モータ52は、センサ板51の回転速度が一定になるように動作が制御される。
【0058】
前述したように、各無線IDタグ22は、基板中心Cからの距離が異なるように配置されている。このため、図9に点線で示すように、基板28の回転に伴って同心円の軌跡を描くように移動する。また、各無線IDタグ22の配設ピッチ(半径方向の間隔)は、リーダー23が有するアンテナ24A〜24Cの検出可能範囲24a〜24cよりも狭いので、少なくとも1つの軌跡が検出可能範囲24a〜24cを通過する。
【0059】
ここで、アンテナ24A〜24Cの検出可能範囲24a〜24cは、複数の無線IDタグ22を検出可能な大きさに定められている。本実施形態では、図9に示すアンテナ24Cの検出可能範囲24cから判るように、最大で5個の無線IDタグ22を検出可能な大きさに定められている。
【0060】
このため、小径ボーリング部17の先端面をセンサ板51の表面に近付けた状態で、リーダー23を動作させつつセンサ板51を1周以上回すと、各アンテナ24A〜24Cの検出可能範囲に無線IDタグ22が必ず存在することとなり、この検出可能範囲に位置する無線IDタグ22から識別情報を含んだ電波が返信される。
【0061】
従って、各アンテナ24A〜24Cがどの無線IDタグ22を検出したかに応じて、小径ボーリング部17の位置を求めることができる。すなわち、各無線IDタグ22は、基板中心Cからの距離が異なるように配置されているので、各アンテナ24A〜24Cで検出された無線IDタグ22の識別情報によって、各アンテナ24A〜24Cの半径方向の位置を認識できる。そして、各アンテナ24A〜24Cにおける半径方向の位置の組み合わせは、小径ボーリング部17の位置に応じて一義にきまる。このため、位置の組み合わせから小径ボーリング部17の位置を求めることができる。
【0062】
なお、この実施形態においても、各アンテナ24A〜24Cで検出された識別情報と小径ボーリング部17の中心位置との組み合わせパターンを予め取得しておき、制御盤の記憶装置に記憶させておくと、処理の簡素化が図れる。
【0063】
なお、本実施形態では、速度が一定となるようにセンサ板51が回転され、検出可能範囲24a〜24cの形状は既知である。このため、検出可能範囲24a〜24cを通過する時間を考慮することで、無線IDタグ22が検出可能範囲24a〜24cの中央を通過したか、端を通過したかが判る。その結果、より精度の高い位置検出が行える。
【0064】
このように、本実施形態では、センサ板51(基板28)が回転された際にリーダー23の検出可能範囲24a〜24cよりも狭い間隔の同心円の軌跡を描くように、各無線IDタグ22が、基板28の回転中心から半径方向に位置をずらして取り付けられているので、第1実施形態よりも少ない数の無線IDタグ22を用いて小径ボーリング部17の位置を計測できる。
【0065】
次に、本発明の第3実施形態について説明する。この実施形態では、棒状スケール61を追加した点が第1実施形態と相違する。その他の構成は第1実施形態と同じであるので相違点を中心に説明する。
【0066】
図11(a),(b)に示すように、第3実施形態では、棒状スケール61を挿入するための挿入孔62を、筒状体27の側壁部27aに設けている。図示の例では、周方向に90度間隔で4本の棒状スケール61が挿入されている。棒状スケール61は、スケール部材の一種であり、図11(c)に示すように、先端に当接用の球形部61aが設けられた棒状部材であり、側面には挿入深さを示す目盛り61bが刻印されている。
【0067】
各棒状スケール61は、筒状体27の中心軸に向かって移動可能な向きに支持されている。このため、側壁部27aの外周面には円筒状のガイドリブ63を突設し、挿入孔62を半径方向に延長している。また、球形部61aは、挿入孔62の直径よりも大きな直径に設けられている。なお、棒状スケール61と挿入孔62の間には止水ゴム等の止水材が設けられており、挿入孔62を通じた泥土の噴出が生じないように構成されている。
【0068】
また、本実施形態では、筒状体27の内部空間に充填材64を充填している。この充填材64は、カッター14で掘削された土砂の筒状体27への流入を防ぎ、センサ板21や棒状スケール61を保護するためのクッション材として機能する。なお、充填材64は、土砂の流入は防ぐが、小径ボーリング部17の侵入は許容することが求められる。このため、充填材64としては、止水性を有するとともに小径ボーリング部17で掘削可能な、発泡樹脂が好適に用いられる。
【0069】
この第3実施形態では、第1実施形態と同様に、小径ボーリング部17の先端に設けたリーダー23によって、センサ板21に設けられたマトリクス状の無線IDタグ22が検出され、小径ボーリング部17の位置が計測される。そして、棒状スケール61を筒状体27の中心軸側に、小径ボーリング部17に当接するまで押し込むことで、小径ボーリング部17の位置を計測することができる。すなわち、各棒状スケール61の押し込み量(球形部61aの当接位置)は、小径ボーリング部17の位置に応じて定まる。このため、各棒状スケール61の押し込み量に基づいて小径ボーリング部17の位置を計測できる。
【0070】
本実施形態では、スケール部材が、筒状体27の外周部に設けられた挿入孔62を通じて、周方向の異なる位置から内側空間へ挿入される4本の棒状スケール61によって構成されているので、それぞれの棒状スケール61の深度に基づいて小径ボーリング部17の位置を計測できる。
【0071】
また、本実施形態では、2種類のスケール部材、すなわちセンサ板21と棒状スケール61を設けているので、センサ板21による計測結果を棒状スケール61によって確認することができる。さらに、センサ板21やリーダー23が万一故障してしまったとしても、棒状スケール61を代用して計測することができる。
【0072】
なお、本実施形態では、90度間隔で配置された4本の棒状スケール61を用いたが、この構成に限定されない。棒状スケール61は少なくとも3本用いればよく、配設間隔も等間隔でなくてもよい。
【0073】
以上の実施形態の説明は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得ると共に本発明にはその等価物が含まれる。例えば、次のように構成してもよい。
【0074】
前述した各実施形態の技術要素は、組み合わせて適用することができる。例えば、第3実施形態の棒状スケール61を第2実施形態に適用してもよい。また、充填材64を第1実施形態や第2実施形態に適用してもよい。さらに、第3実施形態の棒状スケール61のみでスケール部材を構成してもよい。
【0075】
また、第1実施形態の筒状体27に関し、隔壁20から窪ませたものを例示したが、この構成に限定されるものではない。例えば、図12に示すように、底面にセンサ板21を取り付けた筒状体27´を、隔壁20の表面に取り付けてもよい。この筒状体27´も筒状凹部に相当する。
【0076】
さらに、筒状凹部に相当する筒状体27,27´に関し、円筒状のものを例示したが、この構成に限定されるものではない。例えば、断面形状が四角形や六角形の角筒によって構成してもよい。
【0077】
前述の各実施形態では、先行シールドマシン1Aに小径ボーリング部17(ロッド状部)を設け、後行シールドマシン1Bに筒状体27や無線IDタグ22(スケール部材)等を設けた構成を例示したが、この構成に限定されるものではない。すなわち、一対のシールドマシン1A,1Bの一方に小径ボーリング部17が設けられ、他方に筒状体27(筒状凹部)が設けられていればよい。従って、先行シールドマシン1Aに筒状体27等を設け、後行シールドマシン1Bに小径ボーリング部17を設けてもよい。この場合、先行シールドマシン1Aが筒状凹部やスケール部材等を有する第1シールドマシンに相当し、後行シールドマシン1Bがロッド状部を有する第2シールドマシンに相当する。
【0078】
前述の各実施形態では、小径ボーリング部17の先端に無線IDタグ22のリーダー23を取り付けた構成を例示したが、この構成に限定されない。例えば、リーダー23を計測管の先端に設けてもよい。この場合、計測管がロッド状部に相当する。そして、計測に際しては、各シールドマシン1A,1Bの間を連通する連通管を予め地中に形成した後、この連通管の内部空間を通じて計測管を繰り出すようにすればよい。
【0079】
第1実施形態の無線IDタグ22に関し、基板28にマトリクス状に配置したものを例示したが、この構成に限定されない。例えば、ハニカム形状の各頂部に無線IDタグ22を配置してもよい。要するに、固有の識別情報が記憶された無線IDタグ22を、基板28の異なる位置に配置すればよい。
【符号の説明】
【0080】
1A…先行シールドマシン,1B…後行シールドマシン,11…フード部,12…ガーダ部,13…テール部,14…カッター,15…カッターの駆動装置,16…シールドジャッキ,17…小径ボーリング部(17a…回転カッター),18…エレクター,19F…前側スキンプレート,19R…後側スキンプレート,20…隔壁,21…センサ板,22…無線IDタグ,23…リーダー,24…リーダーのアンテナ部(24A〜24C…アンテナ),25…リーダーの送受信部(25a…変調部,25b…復調部),26…リーダーの制御部,27…筒状体(27a…側壁部,27b…底部,27c…回転蓋体,27d…ギア),28…センサ板の基板,29…無線IDタグのアンテナ部,30…無線IDタグの送受信部,31…無線IDタグの制御部,32…無線IDタグのメモリ,41…一方の立坑,42…他方の立坑,51…センサ板,52…駆動モータ,53…駆動ギア,61…棒状スケール(61a…球形部,61b…目盛り),62…挿入孔,63…ガイドリブ,64…充填材,G…地盤,G´…土砂,SG…セグメント
【特許請求の範囲】
【請求項1】
筒状のスキンプレートと、
前記スキンプレートの前端部に配置されたカッターと、
前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁とを有するシールドマシンであって、
前記隔壁には、相手方のシールドマシンから当該シールドマシンの掘進方向に繰り出されたロッド状部を内側空間に受け入れ可能な有底の筒状凹部が設けられ、
前記筒状凹部には、前記ロッド状部の前記内側空間における底面方向の位置を計測するためのスケール部材が設けられていることを特徴とするシールドマシン。
【請求項2】
前記スケール部材は、
前記筒状凹部の底面に配置された基板と、
位置を異ならせた状態で前記基板に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグとを含み、
前記ロッド状部の先端部分には、前記無線IDタグに記憶された前記識別情報を読み取るリーダーが設けられていることを特徴とする請求項1に記載のシールドマシン。
【請求項3】
前記無線IDタグは、前記リーダーの検出可能範囲よりも狭い間隔となるように、前記基板に対してマトリクス状に取り付けられていることを特徴とする請求項2に記載のシールドマシン。
【請求項4】
前記筒状凹部は、円筒状部材によって構成され、
前記基板は、前記筒状凹部の中心軸を中心に周方向へ回転可能に取り付けられており、
前記無線IDタグは、前記基板が回転された際に前記リーダーの検出可能範囲よりも狭い間隔の同心円の軌跡を描くように、前記基板の回転中心から半径方向に位置をずらして取り付けられていることを特徴とする請求項2に記載のシールドマシン。
【請求項5】
前記スケール部材は、前記筒状凹部の外周部に設けられた挿入孔を通じて、周方向の異なる位置から前記内側空間へ挿入される少なくとも3本の棒状スケールを有していることを特徴とする請求項1から4の何れか1項に記載のシールドマシン。
【請求項6】
前記ロッド状部は、地山を掘削する小径ボーリング部によって構成され、
前記筒状凹部の前記内部空間には、前記小径ボーリング部で掘削可能な充填材が充填されていることを特徴とする請求項1から5の何れか1項に記載のシールドマシン。
【請求項7】
第1シールドマシンと第2シールドマシンの相対位置を地中で検出する相対位置検出方法であって、
前記第1シールドマシンは、
筒状のスキンプレートと、
前記スキンプレートの前端部に配置されたカッターと、
前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁と、
前記隔壁に設けられる有底の筒状凹部と、
前記筒状凹部に設けられるスケール部材とを有し、
前記第2シールドマシンは、
当該第2シールドマシンの掘進方向に繰り出されるロッド状部を有し、
前記第2シールドマシンの掘進方向に繰り出された前記ロッド状部を前記筒状凹部の内側空間に受け入れ、前記スケール部材によって前記ロッド状部の前記内側空間における底面方向の位置を計測することで、前記第1シールドマシンと前記第2シールドマシンの相対位置を検出することを特徴とするシールドマシンの相対位置検出方法。
【請求項1】
筒状のスキンプレートと、
前記スキンプレートの前端部に配置されたカッターと、
前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁とを有するシールドマシンであって、
前記隔壁には、相手方のシールドマシンから当該シールドマシンの掘進方向に繰り出されたロッド状部を内側空間に受け入れ可能な有底の筒状凹部が設けられ、
前記筒状凹部には、前記ロッド状部の前記内側空間における底面方向の位置を計測するためのスケール部材が設けられていることを特徴とするシールドマシン。
【請求項2】
前記スケール部材は、
前記筒状凹部の底面に配置された基板と、
位置を異ならせた状態で前記基板に取り付けられるとともに、それぞれに固有の識別情報が記憶された複数の無線IDタグとを含み、
前記ロッド状部の先端部分には、前記無線IDタグに記憶された前記識別情報を読み取るリーダーが設けられていることを特徴とする請求項1に記載のシールドマシン。
【請求項3】
前記無線IDタグは、前記リーダーの検出可能範囲よりも狭い間隔となるように、前記基板に対してマトリクス状に取り付けられていることを特徴とする請求項2に記載のシールドマシン。
【請求項4】
前記筒状凹部は、円筒状部材によって構成され、
前記基板は、前記筒状凹部の中心軸を中心に周方向へ回転可能に取り付けられており、
前記無線IDタグは、前記基板が回転された際に前記リーダーの検出可能範囲よりも狭い間隔の同心円の軌跡を描くように、前記基板の回転中心から半径方向に位置をずらして取り付けられていることを特徴とする請求項2に記載のシールドマシン。
【請求項5】
前記スケール部材は、前記筒状凹部の外周部に設けられた挿入孔を通じて、周方向の異なる位置から前記内側空間へ挿入される少なくとも3本の棒状スケールを有していることを特徴とする請求項1から4の何れか1項に記載のシールドマシン。
【請求項6】
前記ロッド状部は、地山を掘削する小径ボーリング部によって構成され、
前記筒状凹部の前記内部空間には、前記小径ボーリング部で掘削可能な充填材が充填されていることを特徴とする請求項1から5の何れか1項に記載のシールドマシン。
【請求項7】
第1シールドマシンと第2シールドマシンの相対位置を地中で検出する相対位置検出方法であって、
前記第1シールドマシンは、
筒状のスキンプレートと、
前記スキンプレートの前端部に配置されたカッターと、
前記スキンプレートにおける前記カッターよりも後方の位置に設けられた隔壁と、
前記隔壁に設けられる有底の筒状凹部と、
前記筒状凹部に設けられるスケール部材とを有し、
前記第2シールドマシンは、
当該第2シールドマシンの掘進方向に繰り出されるロッド状部を有し、
前記第2シールドマシンの掘進方向に繰り出された前記ロッド状部を前記筒状凹部の内側空間に受け入れ、前記スケール部材によって前記ロッド状部の前記内側空間における底面方向の位置を計測することで、前記第1シールドマシンと前記第2シールドマシンの相対位置を検出することを特徴とするシールドマシンの相対位置検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−44134(P2013−44134A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181901(P2011−181901)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
[ Back to top ]