
省エネ走行機能付き自動車
【課題】走行駆動の動力源として電動モータを備えた自動車であって、走行時のエネルギー効率を低コストで向上させることができる省エネ走行機能付き自動車を提供する。
【解決手段】電動モータ3に電力を供給する電力供給装置10と、車輪4への動力を変動させる動力変動手段を備え、アクセル操作量によって電動モータ3への駆動電流の指令値が定まるように電力供給装置10を構成し、車両及び電動モータ3の特性に基づき走行時のパワー損失を求めるモデル式を予め求め、車速及び駆動電流の検出値によって、車輪4に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該制御値に基づいて動力変動手段を制御する省エネ走行制御を制御部に設け、該制御部は、電動モータ3の動力のみで車輪4が駆動されている間、省エネ走行制御を実行する。
【解決手段】電動モータ3に電力を供給する電力供給装置10と、車輪4への動力を変動させる動力変動手段を備え、アクセル操作量によって電動モータ3への駆動電流の指令値が定まるように電力供給装置10を構成し、車両及び電動モータ3の特性に基づき走行時のパワー損失を求めるモデル式を予め求め、車速及び駆動電流の検出値によって、車輪4に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該制御値に基づいて動力変動手段を制御する省エネ走行制御を制御部に設け、該制御部は、電動モータ3の動力のみで車輪4が駆動されている間、省エネ走行制御を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、動力源として電動モータを備えた省エネ走行機能付き自動車に関する。
【背景技術】
【0002】
近年の環境問題への関心の高まりにより、排気ガスを出す内燃機関に代えて、電動モータを動力源として用いた自動車の開発が急速に進められている。このような自動車はバッテリからの電力供給によって電動モータを駆動するのが一般的であるが、バッテリ1回の充電で走行できる距離がガソリンエンジン等の内燃機関を用いた場合に比べて短く、走行時のエネルギー効率を如何に向上させるかが重要になる。
【0003】
例えば、電動モータに電力を供給する電力供給装置と、電動モータからの動力を車輪に伝動する伝動装置と、電力供給装置から電動モータに供給される駆動電流の値を検出する電流値検出手段とを備え、車輪に伝動される動力を変化させる動力変動手段を前記電動モータ又は前記伝動装置に設け、動力変動手段を介して車輪の駆動を制御する制御部を設けた特許文献1に示す自動車が公知になっている。
【0004】
具体的には、ステータと、該ステータに対して同一軸で且つ回転自在なロータとを備え、駆動電流が供給されるコイル巻線をスタータに設けるとともに該コイル巻線と対向する永久磁石をロータに設けた電動モータであって、該電動モータは、ステータをロータに対して軸方向に移動させ、これによって有効磁束を変化させ、動力を変動させる。
【0005】
そして、制御部は駆動電流をPWM制御し、駆動電流のデューティ比が最大になったことが検出された場合には、動力変動手段を介して有効磁束を減少させることにより、走行効率を向上させている。
【0006】
しかし、PWM制御時の駆動電流のデューティ比が最大か否かという2段階の大雑把な制御であり、エネルギー効率を向上させるという観点で、不十分なものである。そして、これは、動力変動手段として、電動モータから車輪に伝動される動力の回転数を変速する変速装置を用いた場合でも同様である。
【0007】
ところで、内燃機関であるエンジンを動力源として備え、エンジンから車輪に伝動される動力の回転数を変速する変速装置と、変速装置の変速制御を行うマイコン(制御部)と、エンジン回転数検出手段と、車速を検出する車速検出手段と、エンジンへの燃料供給量を定めるスロットル開度を検出するスロットル開度検出手段と備え、スロットル開度及び車速から燃費が良好になるエンジン回転数が導出される3次元の高燃費用変速マップを予め作成してマイコンの記憶部に記憶し、マイコンが、検出されるエンジン回転数、車速及びスロットル開度から、高燃費用変速マップに基づいて、変速装置の変速制御を行い、燃費効率を向上させた特許文献2に示す自動車が公知になっている。
【0008】
この高燃費用変速マップは、スロット開度に代えて駆動電流を変数にすることにより、電動モータを動力源として用いる場合にも作成可能であり、これによって、動力変動手段(変速装置)の動力変動制御を細かく行い、走行効率を向上させることが可能である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2008−220108号公報(第2図)
【特許文献2】特開2008−164028号公報(第3−5図)
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、高燃費用変速マップは、実機を用いた膨大な実験データに基づいて作成されるものであり、しかも、動力源と動力変動手段との組合せ等で変化するため、その作成には時間と手間が掛かり、コストが高くなる。
【0011】
本発明は、走行駆動の動力源として電動モータを備えた自動車であって、走行時のエネルギー効率を低コストで向上させることができる省エネ走行機能付き自動車を提供することを課題としている。
【課題を解決するための手段】
【0012】
上記課題を解決するため、第1に、電動モータ3に電力を供給する電力供給装置10と、電動モータ3からの動力を車輪4に伝動する伝動装置9と、電力供給装置10から電動モータ3に供給される駆動電流の値を検出する電流値検出手段23と、車速を検出する車速検出手段26とを備え、車輪4に伝動される動力を変化させる動力変動手段を前記電動モータ3又は前記伝動装置9に設け、動力変動手段を介して車輪4の駆動を制御する制御部22を設けた自動車において、アクセル操作検出手段12で検出されるアクセル操作量によって駆動電流の指令値が定まるように電力供給装置10を構成し、車両及び電動モータ3の特性に基づき、走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪4に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御する省エネ走行制御を前記制御部22に設け、該制御部22は、電動モータ3からの動力のみによって車輪4が駆動されている間のみ、省エネ走行制御を実行することを特徴としている。
【0013】
第2に、電動モータ3から車輪4に伝動される動力を変速する変速機構17を伝動装置9に設けることにより動力変動手段を構成し、制御値が電動モータ3から車輪4に動力を伝動する場合における変速比の値になることを特徴としている。
【0014】
第3に、励磁電流の変更より電動モータ3内の磁界を変動させる電磁石39によって前記動力変動手段を構成し、制御値が上記励磁電流の値になることを特徴としている。
【0015】
第4に、電動モータ3内での変位により電動モータ3内の磁界を変動させる永久磁石42によって前記動力変動手段を構成し、制御値が永久磁石42の変位量になることを特徴としている。
【0016】
第5に、電動モータ3の温度を検出する温度検出手段32を設け、制御部22は、省エネ走行モードの実行中、温度検出手段32により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させることを特徴としている。
【0017】
第6に、電流値検出手段23は、フィルタ20を介して、上記駆動電流の値を検出することを特徴としている。
【発明の効果】
【0018】
走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御するため、作成に時間や手間が掛かりコスト高になる変速マップを用いる場合と比較して、走行時のエネルギー効率を低コストで向上させることが可能になる。
【0019】
これに加えて、アクセル操作検出手段で検出されるアクセル操作量によって駆動電流の指令値を定めるように電力供給装置を構成することにより、アクセル操作量に応じて電動モータが直接的に制御されるため、アクセル操作に応じて応答良く車速が増減されるとともに、このアクセル操作が反映された駆動電流に応じて、動力変動手段が制御されるため、アクセル操作の応答性と走行時のエネルギー効率の向上を高次元で両立できる。
【0020】
また、電動モータの温度を検出する温度検出手段を設け、制御部は、省エネ走行モードの実行中、温度検出手段により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させることにより、温度情報が加味され、走行時のエネルギー効率がさらに向上する。
【0021】
さらに、電流値検出手段は、フィルタを介しているので、より正確に駆動電流値と位相情報を検出できる。
【図面の簡単な説明】
【0022】
【図1】本発明を適用した自動車の構成を示す概念図である。
【図2】本自動車に搭載された制御部のブロック図である。
【図3】制御部が行う走行制御の処理フロー図である。
【発明を実施するための形態】
【0023】
本願発明者らは、走行時のエネルギー効率を向上させるべく、走行時における仕事率(パワー)の損失を算出するモデル式(パワー損失式)を求める。ここで、上記パワー損失式を求める難易度は、電動モータを動力源として用いる場合の方が、内燃機関であるエンジンを動力源として用いる場合よりも易しいことを発見し、本発明はこれを利用したものである。
【0024】
以下図示する例に基づき本発明の実施形態を説明する。
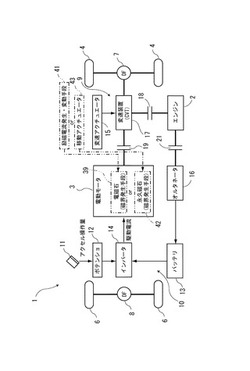
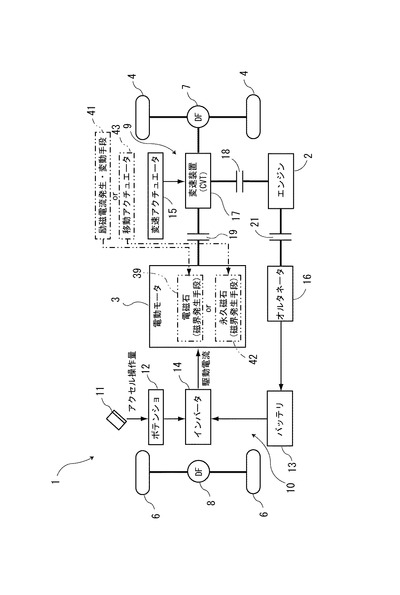
図1は、本発明を適用した自動車の構成を示す概念図である。自動車1は、動力源として、内燃機関であるエンジン2及び電動モータ3を備えたハイブリット型の四輪自動車であり、駆動方式はFF駆動方式を採用している。なお、電動モータ3のみで走行駆動するモードを有する自動車であれば本発明を適用可能であり、二輪車でもよく、このため、動力源として電動モータ3のみを備えた電気自動車でもよく、駆動方式もFF駆動方式に限定されずにFR駆動方式やMR駆動方式等でもよい。
【0025】
この他、図示する自動車は、前側の左右の車輪(前輪)4,4と、後側の左右の車輪(後輪)6,6と、旋回時等における左右の車輪4,4,6,6の回転数差を吸収する差動歯車装置(デフ)7,8と、エンジン2及び電動モータ3の動力を車輪4,4に伝動する伝動装置9と、アクセルペダル(アクセル操作具)11と、アクセルペダル11を介したアクセル操作及びその操作量を検出するアクセル操作検出手段であるアクセルポテンショメータ12と、バッテリ13と、アクセルポテンショメータ12によって検出されたアクセル操作量に応じた電力を上記バッテリ13から電動モータ3に供給する電力供給回路であるインバータ14と、エンジン2の動力によって発電駆動されるとともに該発電した電力をバッテリ13に供給するオルタネータ16とを備えている。ちなみに、このバッテリ13及びインバータ14によって電力供給装置10が構成されている。
【0026】
上記伝動装置9は、車輪4,4に伝動する動力の回転数を無段階で変速するCVT(変速機構,動力変動手段)17と、エンジン2からCVT17への動力伝動を断続させる油圧式のエンジン側クラッチ18と、電動モータ3からCVT17への動力伝動を断続させる油圧式の電動モータ側クラッチ19と、エンジン2からオルタネータ16への動力伝動を断続させる油圧式の発電側クラッチ21とから構成されており、上記CVT17は、動力源2,3からの動力が伝動されるプーリ(図示しない)と、車輪4,4側に動力を伝動するプーリ(図示しなに)と、該一対のプーリに掛け回されるVベルト(図示しない)とを備え、この一対のプーリ及びVベルトは、変速アクチュエータ(図示する例では電動モータ)15によって、無段階で変速駆動される。なお、変速機構17として、複数の変速段を有するトランスミッション等を採用してもよい。
【0027】
また、この自動車1は、減速時や下り坂の走行時に電動モータ3を発電機として利用し、この発電した電力を、インバータ14等を介して、或いは直接的に、バッテリ13に戻す回生充電機能を備えている。
【0028】
該構成の自動車1は、モータ側クラッチ19を接続作動させ且つエンジン側クラッチ18を切断作動させて電動モータ3のみの動力で走行駆動されるモータ走行モードと、モータ側クラッチ19を切断作動させ且つエンジン側クラッチ18を接続作動させてエンジン2の動力のみで走行駆動されるエンジン走行モードとの2つの走行モードを有する。
【0029】
また、この自動車1には、エンジン2の駆動時に発電側クラッチ21を接続作動させ、オルタネータ16を発電駆動させ、この発電した電力をバッテリに蓄える充電モードと、発電側クラッチ21を切断作動させてオルタネータ16を停止状態とする非充電モードとを有している。
【0030】
さらに、本自動車1によれば、運転手がアクセル操作を行うと、該アクセル操作及びその操作量がアクセルポテンショメータ12によって検出され、この検出されたアクセル操作量に応じて、インバータ14から電動モータ3に供給される電力の電流(駆動電流)の指令値が定まり、実際に検出される駆動電流がこの指令値に近づくようにインバータ14がダイレクトに作動し、これによって、バッテリ13から電動モータ3に供給される駆動電流の値が直接的に変化するため、運転手が違和感無く、走行速度の増減速操作を行うことが可能になる。ちなみに、指令値と、その指令の直後に検出される駆動電流とが異なるのは、該駆動電流の値が、走行している道路の傾斜角度や、風速(空気摩擦)や、車輪4,6の摩擦等によっても変動するためである。言換えると、駆動電流の値には、そのような走行状態に関する情報が反映されている。本願発明では、この駆動電流の値に含まれている情報に着目し、これを利用する。
【0031】
そして、変速アクチュエータ15を介してCVT17により走行変速を行う(動力変動手段により動力変動制御を行う)走行制御と、モータ側クラッチ19及びエンジン側クラッチ18を介した走行モードの切換制御と、発電側クラッチ21を介した充填モードと非充電モードとの切換制御を、マイコン等からなる制御部22(図2参照)によって行う。
【0032】
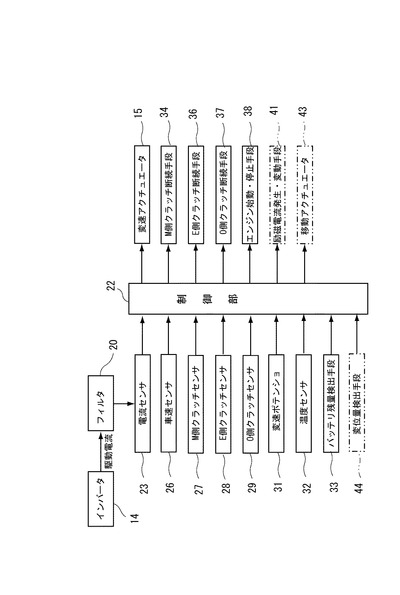
図2は、本自動車に搭載された制御部のブロック図である。
制御部22の入力側には、インバータ14からの上記駆動電流の値をフィルタ20を介して検出する電流センサ(電流値検出手段)23と、デフ7、8の伝動上流側に設置されて走行速度(車速)を検出する車速センサ(検出手段)26と、モータ側クラッチ19の断続を検出するモータ側クラッチセンサ27と、エンジン側クラッチ18の断続を検出するエンジン側クラッチセンサ28と、発電側クラッチ21の断続を検出する発電側クラッチセンサ29と、CVT17のその時点での変速比を検出する変速ポテンショメータ31と、電動モータ3の温度を検出する温度センサ(温度検出手段)32と、バッテリ13の残量を検出するバッテリ残量検出手段33とが、接続されている。
【0033】
ちなみに、インバータ14は、電動モータ3が直流モータの場合にはPWM制御の直流電圧を生成し、電動モータ3が交流モータ3の場合には三相交流電圧を生成する。また、フィルタ20は、インバータ14から出力される駆動電流から、所定の物理量(例えば、PWM制御された駆動電流の平均値、三相交流の駆動電流のd軸成分とq軸成分)を抽出し、この物理量を電流センサ23によって検出する。これによって検出精度や制御性能が向上する。
【0034】
制御部22の出力側には、変速アクチュエータ15と、作動油の供給・排出によってモータ側クラッチ19を断続作動させる油圧等バルブからなるモータ側クラッチ断続手段34と、作動油の供給・排出によってエンジン側クラッチ18を断続作動させる油圧バルブ等からなるエンジン側クラッチ断続手段36と、作動油の供給・排出によって発電側クラッチ21を断続作動させる油圧バルブ等からなる発電側クラッチ断続手段37と、エンジン2を始動・停止させるエンジン始動・停止手段38とが接続されている。
【0035】
制御部22は、走行状態によって走行モードの切換を行うとともに、バッテリ13の残量によって充電モードと非充電モードとの切換を行う。例えば、バッテリ13の残量が少なくなった場合にはエンジン走行モード、バッテリ13の残量が多い場合にはモータ走行モードへの切換を行ってもよいし、車速が低速の場合には、モータ走行モード、車速が高速の場合にはエンジン走行モードへの切換を行う等の切換制御を行う。また、バッテリ13の残量が少なくなった場合には充電モード、バッテリ13の残量が多い場合には非充電モードへの切換を行ってもよい。
【0036】
この他、この制御部22は、モータ走行モードでの走行時におけるエネルギー効率を向上(具体的には、走行時におけるバッテリ13の電力消費量を低下)させるために、前記走行制御を行う。
【0037】
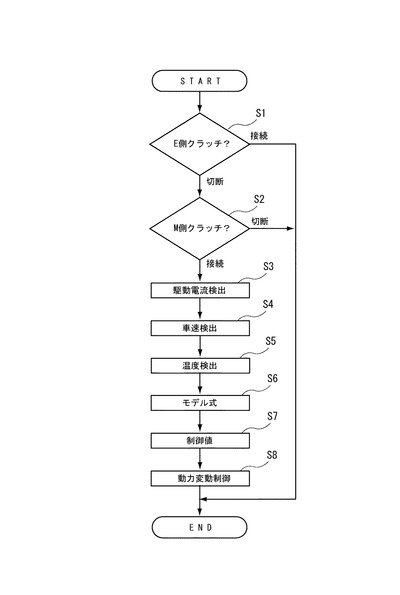
図3は、制御部が行う走行制御の処理フロー図である。
制御部22は、所定時間毎(具体的には、0.001〜0.5秒間隔)に、この制御を実行する。処理が開始されると、ステップS1に進む。ステップS1では、エンジン側クラッチセンサ28によって、エンジン側クラッチ18の断続検出を行い、エンジン側クラッチ18が接続状態であれば、モータ走行モードに切換えられている状態ではないため、処理を終了させる一方で、エンジン側クラッチ18が切断状態であれば、ステップS2に進む。
【0038】
ステップS2では、モータ側クラッチセンサ27によって、モータ側クラッチ19の断続検出を行い、モータ側クラッチ19が切断状態であれば、モータ走行モードに切換えられている状態ではないため、処理を終了させる一方で、モータ側クラッチ19が接続状態であれば、モータ走行モードに切換えられている状態であるため、ステップS3に進む。
【0039】
このようにステップS1→ステップS2→ステップS3と処理が進むと、該ステップS3→・・・以降の処理で、省エネ走行制御が実行される。すなわち、走行モードがモータ走行モードになっている場合のみ、制御部22に設けられた省エネ走行制御が実行される。
【0040】
ステップS3では、電流センサ23によって駆動電流の値を検出し、ステップS4に進む。ステップS4では、車速センサ26によって車速を検出し、ステップS5に進む。ステップS5では、温度センサ32によって電動モータ3の温度を検出し、ステップS6に進む。ステップS6では、自動車1の車両の特性及び電動モータ3の特性が各種パラメータとして含まれるようにして前もって求められたパワー損失式に、検出された駆動電流及び車速の値を代入し、ステップS7に進む。
【0041】
ちなみに、パワー損失式は、制御対象であるCVTに基づいて定まる車輪4,4への変速比(制御値)を変数としており、検出された駆動電流及び車速の値が代入されることにより、制御値のみを変数とするパワー損失式が求まる。この他、上記パラメータのうち、少なくとも電動モータ3に関するパラメータであって、温度に左右されるものは、前記検出された温度によって、その値を変化させる。このパワー損失式の詳細は後述する。
【0042】
ステップS7では、パワー損失式に基づき、走行時の損失パワーを最小にする(小さくする)方程式を導出し、この方程式を解くことによって制御値を求め、ステップS8に進む。ステップS8では、上記求められた制御値が、実際の制御値(具体的には、変速ポテンショメータ31によって検出される制御値)と同一又は最も近い値になるように、変速アクチュエータ15によってCVT17の変速制御を行い、処理を終了させる。
【0043】
該構成によれば、その時点での、アクセル操作量と、車速と、駆動電流の値に反映された道路の傾斜や車輪3,4の摩擦や風速等とに応じて、パワー損失を最小又は小さくする制御値が適宜算出され、これによってCVT17が適宜、動力変動制御されるため、走行時におけるエネルギー効率を向上させることができる。
【0044】
なお、上述した例では、電動モータ3から車輪4,4に伝動される動力の回転数を、CVT17によって変動させ、この場合における回転数の変速比を制御値としたが、他の手段によって動力を変動させる動力変動手段を構成してもよい。
【0045】
上述の例では、ステータと、該ステータに対して同一軸で且つ回転自在なロータとを備え、駆動電流が供給されるコイル巻線をスタータに設けるとともに該コイル巻線と対向する永久磁石をロータに設けた電動モータ3等を用いたが、図2に仮想線で示すように、永久磁石の代わりに電磁石39を用いた可変磁界モータを用いてもよい。
【0046】
そして、図2及び図3に仮想線で示す通り、電磁石39に供給する励磁電流の値を変更させることにより、動力発生時に有効に作用する磁界の磁束である有効磁束を変化させ、これによって発生する動力を変動させるものであり、この電磁石39に供給される励磁電流を変化させる励磁電流発生・変動手段41が制御部の出力側に接続されている。
【0047】
この電磁石39によって上記動力変動手段が構成され、この場合の制御値は励磁電流値になり、該構成によれば、変速機構17を省略することも可能であるし、該電磁石39と変速機構17を組合せて用いてもよい。ちなみに、この制御値は、制御部22からの出力値であるため、この値を検出するために別途センサ等の検出手段を制御部22の入力側に設ける必要はない。
【0048】
また、電動モータ3でも、上記磁石として可動式の永久磁石42を用い、この永久磁石42を動力変動手段としてもよい。すなわち、この永久磁石42のコイル巻線に対する相対位置を変位させることにより、有効磁束を変化させる。
【0049】
該構成としては、例えば、上述した特許文献1に示すものであり、具体的には、図2及び図3に仮想線で示す通り、ステータをロータに対して軸方向に移動させる移動アクチュエータ43を制御部22の出力側に接続する一方で、制御部22の入力側に、永久磁石42のコイル巻線に対する変位量を検出する変位量検出手段44を接続し、この変位量を制御値とする。
【0050】
この可動式の永久磁石42によって、変速機構17を省略することも可能であるし、この可動式の永久磁石42と変速機構17を組合せてもよい。
【0051】
次に、パワー損失式について説明する。
まず、動力変動手段としてCVT17のみを用いた場合のパワー損失式について、説明する。駆動電流をibとし、駆動モータ3のトルク定数をKとし、電動モータ3の回転数に対する車速の比である変速比をnとすると、自動車1の駆動力Fpは以下の式で表される。
【0052】
【数1】

【0053】
また、車速をv、車体の質量をMb、電動モータ3の慣性モーメントをHm、走行時の加速度をa、空気圧力抵抗係数をFa、転がり抵抗力をFr、走行面の水平面に対する傾斜をΦ、傾斜Φ時における重力をG(Φ)とすると、運動方程式は以下の式で表される。ちなみに、以下の式におけるMb+n2Hmは車体の等価質量を意味している。
【0054】
【数2】
【0055】
ここで、減速時における運動エネルギーの減少分や、下り坂走行時における位置エネルギーの減少分は、上述した回生充電機能により、電気エネルギーに変換され、バッテリ13に蓄えられるものとする。そして、パワー損失をpとし、電動モータ3の電気抵抗をRとし、電動モータ3のヒステリシス損係数をHyとし、電動モータ3の過電流損係数をEdとし、インバータ14の順方向電圧降下をVdとすると、このパワー損失pは、ここでは、熱損失と同義であるため、この熱損失を求めるパワー損失式は以下のように表される。
【0056】
【数3】
【0057】
すなわち、パワー損失を、電動モータ3の抵抗熱及びヒステリシス損と、インバータ14の順方向電圧降下による損失と、車両の空気抵抗よる損失と、車輪4の転がり抵抗による損失とで、モデル化する。ここで、駆動電流ibが変速比nに線形的に依存することに注意すると、このパワー損失式において、変速比nを変数とした場合、パワー損失pを最小するには、以下の方程式を解く必要がある。
【0058】
【数4】
【0059】
具体的には、以下の2次方程式になる。
【0060】
【数5】
【0061】
この変速比nについての2次元方程式を解くことにより、パワー損失pを最小とする変速比nが求まり、実際の変速比が、この求められた該変速比nと同一又は近くなるように、CVT17の変速制御が制御部22を介して行われる。
【0062】
続いて、動力変動手段として電磁石39を用いた場合のパワー損失式について、説明する。励磁電流をifとし、駆動モータ3のトルク定数をkとし、変速比をnとすると、自動車1の駆動力Fpは以下の式で表される。ちなみに、CVT17はここでは制御対象としないため、変速比nは固定値になる。
【0063】
【数6】
【0064】
そして、運動方程式は上述した例と同一になり、電磁石39の抵抗をRfとすると、パワー損失式は以下の通り表される。
【0065】
【数7】
【0066】
すなわち、前記の例に、電磁石の抵抗熱の損失を加えて、パワー損失式がモデル化される。また、このモデル式において、励磁電流ifを変数とした場合、パワー損失pを最小するには、以下の方程式を解く必要がある。
【0067】
【数8】
【0068】
具体的には、以下の2次方程式になる。
【0069】
【数9】
【0070】
この励磁電流ifについての2次元方程式を解くことにより、パワー損失pを最小とする励磁電流ifが導出され、実際の励磁電流が、前記導出された該励磁電流ifと同一又は近くなるように、制御部22を介して励磁電流の制御が行われる。
【0071】
続いて、動力変動手段として可動する永久磁石42のみを用いた場合のパワー損失式について、説明する。永久磁石42の変位量をθとした場合、運動方程式は、以下の式により算出される。
【0072】
【数10】
【0073】
さらに、パワー損失式は、以下のようになる。
【0074】
【数11】
【0075】
そして、駆動電流ibは変位量θによって変動することに留意して、このパワー損失pを最小とするθを求める式は、以下の通りになる。
【0076】
【数12】
【0077】
この方程式も、変位量θのみを変数とする代数方程式であるため、制御部22によって容易に数値解又はこの数値解に近い値を求めることができる。
【0078】
また、この可動式の永久磁石42を用いた動力変動手段に、CVT17を組合せる場合にも、以下の運動方程式及びパワー損失式が求められる。
【0079】
【数13】
【0080】
このパワー損失pを最小とする変位量θ及び変速比nを求める式は、以下の通りになる。
【0081】
【数14】
【0082】
この連立方程式を解いて数値解を求めれば、パワー損失pを最小とする変位量θ及び変速比nが求まる。
【0083】
さらに、この電磁石39を用いた動力変動手段に、CVT17を組合せる場合にも、同様の手法によって、このパワー損失pを最小とする励磁電流if及び変速比nの値を求めることが可能である。
【符号の説明】
【0084】
3 電動モータ(動力源)
4 前輪(車輪)
9 伝動装置
10 電力供給装置
12 アクセルポテンショメータ(アクセル操作検出手段)
17 CVT(動力電動手段,変速機構)
22 制御部(マイコン)
23 電流センサ(電流値検出手段)
26 車速センサ(車速検出手段)
32 温度センサ(温度検出手段)
39 電磁石(動力変動手段)
42 永久磁石(動力変動手段)
【技術分野】
【0001】
この発明は、動力源として電動モータを備えた省エネ走行機能付き自動車に関する。
【背景技術】
【0002】
近年の環境問題への関心の高まりにより、排気ガスを出す内燃機関に代えて、電動モータを動力源として用いた自動車の開発が急速に進められている。このような自動車はバッテリからの電力供給によって電動モータを駆動するのが一般的であるが、バッテリ1回の充電で走行できる距離がガソリンエンジン等の内燃機関を用いた場合に比べて短く、走行時のエネルギー効率を如何に向上させるかが重要になる。
【0003】
例えば、電動モータに電力を供給する電力供給装置と、電動モータからの動力を車輪に伝動する伝動装置と、電力供給装置から電動モータに供給される駆動電流の値を検出する電流値検出手段とを備え、車輪に伝動される動力を変化させる動力変動手段を前記電動モータ又は前記伝動装置に設け、動力変動手段を介して車輪の駆動を制御する制御部を設けた特許文献1に示す自動車が公知になっている。
【0004】
具体的には、ステータと、該ステータに対して同一軸で且つ回転自在なロータとを備え、駆動電流が供給されるコイル巻線をスタータに設けるとともに該コイル巻線と対向する永久磁石をロータに設けた電動モータであって、該電動モータは、ステータをロータに対して軸方向に移動させ、これによって有効磁束を変化させ、動力を変動させる。
【0005】
そして、制御部は駆動電流をPWM制御し、駆動電流のデューティ比が最大になったことが検出された場合には、動力変動手段を介して有効磁束を減少させることにより、走行効率を向上させている。
【0006】
しかし、PWM制御時の駆動電流のデューティ比が最大か否かという2段階の大雑把な制御であり、エネルギー効率を向上させるという観点で、不十分なものである。そして、これは、動力変動手段として、電動モータから車輪に伝動される動力の回転数を変速する変速装置を用いた場合でも同様である。
【0007】
ところで、内燃機関であるエンジンを動力源として備え、エンジンから車輪に伝動される動力の回転数を変速する変速装置と、変速装置の変速制御を行うマイコン(制御部)と、エンジン回転数検出手段と、車速を検出する車速検出手段と、エンジンへの燃料供給量を定めるスロットル開度を検出するスロットル開度検出手段と備え、スロットル開度及び車速から燃費が良好になるエンジン回転数が導出される3次元の高燃費用変速マップを予め作成してマイコンの記憶部に記憶し、マイコンが、検出されるエンジン回転数、車速及びスロットル開度から、高燃費用変速マップに基づいて、変速装置の変速制御を行い、燃費効率を向上させた特許文献2に示す自動車が公知になっている。
【0008】
この高燃費用変速マップは、スロット開度に代えて駆動電流を変数にすることにより、電動モータを動力源として用いる場合にも作成可能であり、これによって、動力変動手段(変速装置)の動力変動制御を細かく行い、走行効率を向上させることが可能である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2008−220108号公報(第2図)
【特許文献2】特開2008−164028号公報(第3−5図)
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、高燃費用変速マップは、実機を用いた膨大な実験データに基づいて作成されるものであり、しかも、動力源と動力変動手段との組合せ等で変化するため、その作成には時間と手間が掛かり、コストが高くなる。
【0011】
本発明は、走行駆動の動力源として電動モータを備えた自動車であって、走行時のエネルギー効率を低コストで向上させることができる省エネ走行機能付き自動車を提供することを課題としている。
【課題を解決するための手段】
【0012】
上記課題を解決するため、第1に、電動モータ3に電力を供給する電力供給装置10と、電動モータ3からの動力を車輪4に伝動する伝動装置9と、電力供給装置10から電動モータ3に供給される駆動電流の値を検出する電流値検出手段23と、車速を検出する車速検出手段26とを備え、車輪4に伝動される動力を変化させる動力変動手段を前記電動モータ3又は前記伝動装置9に設け、動力変動手段を介して車輪4の駆動を制御する制御部22を設けた自動車において、アクセル操作検出手段12で検出されるアクセル操作量によって駆動電流の指令値が定まるように電力供給装置10を構成し、車両及び電動モータ3の特性に基づき、走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪4に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御する省エネ走行制御を前記制御部22に設け、該制御部22は、電動モータ3からの動力のみによって車輪4が駆動されている間のみ、省エネ走行制御を実行することを特徴としている。
【0013】
第2に、電動モータ3から車輪4に伝動される動力を変速する変速機構17を伝動装置9に設けることにより動力変動手段を構成し、制御値が電動モータ3から車輪4に動力を伝動する場合における変速比の値になることを特徴としている。
【0014】
第3に、励磁電流の変更より電動モータ3内の磁界を変動させる電磁石39によって前記動力変動手段を構成し、制御値が上記励磁電流の値になることを特徴としている。
【0015】
第4に、電動モータ3内での変位により電動モータ3内の磁界を変動させる永久磁石42によって前記動力変動手段を構成し、制御値が永久磁石42の変位量になることを特徴としている。
【0016】
第5に、電動モータ3の温度を検出する温度検出手段32を設け、制御部22は、省エネ走行モードの実行中、温度検出手段32により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させることを特徴としている。
【0017】
第6に、電流値検出手段23は、フィルタ20を介して、上記駆動電流の値を検出することを特徴としている。
【発明の効果】
【0018】
走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御するため、作成に時間や手間が掛かりコスト高になる変速マップを用いる場合と比較して、走行時のエネルギー効率を低コストで向上させることが可能になる。
【0019】
これに加えて、アクセル操作検出手段で検出されるアクセル操作量によって駆動電流の指令値を定めるように電力供給装置を構成することにより、アクセル操作量に応じて電動モータが直接的に制御されるため、アクセル操作に応じて応答良く車速が増減されるとともに、このアクセル操作が反映された駆動電流に応じて、動力変動手段が制御されるため、アクセル操作の応答性と走行時のエネルギー効率の向上を高次元で両立できる。
【0020】
また、電動モータの温度を検出する温度検出手段を設け、制御部は、省エネ走行モードの実行中、温度検出手段により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させることにより、温度情報が加味され、走行時のエネルギー効率がさらに向上する。
【0021】
さらに、電流値検出手段は、フィルタを介しているので、より正確に駆動電流値と位相情報を検出できる。
【図面の簡単な説明】
【0022】
【図1】本発明を適用した自動車の構成を示す概念図である。
【図2】本自動車に搭載された制御部のブロック図である。
【図3】制御部が行う走行制御の処理フロー図である。
【発明を実施するための形態】
【0023】
本願発明者らは、走行時のエネルギー効率を向上させるべく、走行時における仕事率(パワー)の損失を算出するモデル式(パワー損失式)を求める。ここで、上記パワー損失式を求める難易度は、電動モータを動力源として用いる場合の方が、内燃機関であるエンジンを動力源として用いる場合よりも易しいことを発見し、本発明はこれを利用したものである。
【0024】
以下図示する例に基づき本発明の実施形態を説明する。
図1は、本発明を適用した自動車の構成を示す概念図である。自動車1は、動力源として、内燃機関であるエンジン2及び電動モータ3を備えたハイブリット型の四輪自動車であり、駆動方式はFF駆動方式を採用している。なお、電動モータ3のみで走行駆動するモードを有する自動車であれば本発明を適用可能であり、二輪車でもよく、このため、動力源として電動モータ3のみを備えた電気自動車でもよく、駆動方式もFF駆動方式に限定されずにFR駆動方式やMR駆動方式等でもよい。
【0025】
この他、図示する自動車は、前側の左右の車輪(前輪)4,4と、後側の左右の車輪(後輪)6,6と、旋回時等における左右の車輪4,4,6,6の回転数差を吸収する差動歯車装置(デフ)7,8と、エンジン2及び電動モータ3の動力を車輪4,4に伝動する伝動装置9と、アクセルペダル(アクセル操作具)11と、アクセルペダル11を介したアクセル操作及びその操作量を検出するアクセル操作検出手段であるアクセルポテンショメータ12と、バッテリ13と、アクセルポテンショメータ12によって検出されたアクセル操作量に応じた電力を上記バッテリ13から電動モータ3に供給する電力供給回路であるインバータ14と、エンジン2の動力によって発電駆動されるとともに該発電した電力をバッテリ13に供給するオルタネータ16とを備えている。ちなみに、このバッテリ13及びインバータ14によって電力供給装置10が構成されている。
【0026】
上記伝動装置9は、車輪4,4に伝動する動力の回転数を無段階で変速するCVT(変速機構,動力変動手段)17と、エンジン2からCVT17への動力伝動を断続させる油圧式のエンジン側クラッチ18と、電動モータ3からCVT17への動力伝動を断続させる油圧式の電動モータ側クラッチ19と、エンジン2からオルタネータ16への動力伝動を断続させる油圧式の発電側クラッチ21とから構成されており、上記CVT17は、動力源2,3からの動力が伝動されるプーリ(図示しない)と、車輪4,4側に動力を伝動するプーリ(図示しなに)と、該一対のプーリに掛け回されるVベルト(図示しない)とを備え、この一対のプーリ及びVベルトは、変速アクチュエータ(図示する例では電動モータ)15によって、無段階で変速駆動される。なお、変速機構17として、複数の変速段を有するトランスミッション等を採用してもよい。
【0027】
また、この自動車1は、減速時や下り坂の走行時に電動モータ3を発電機として利用し、この発電した電力を、インバータ14等を介して、或いは直接的に、バッテリ13に戻す回生充電機能を備えている。
【0028】
該構成の自動車1は、モータ側クラッチ19を接続作動させ且つエンジン側クラッチ18を切断作動させて電動モータ3のみの動力で走行駆動されるモータ走行モードと、モータ側クラッチ19を切断作動させ且つエンジン側クラッチ18を接続作動させてエンジン2の動力のみで走行駆動されるエンジン走行モードとの2つの走行モードを有する。
【0029】
また、この自動車1には、エンジン2の駆動時に発電側クラッチ21を接続作動させ、オルタネータ16を発電駆動させ、この発電した電力をバッテリに蓄える充電モードと、発電側クラッチ21を切断作動させてオルタネータ16を停止状態とする非充電モードとを有している。
【0030】
さらに、本自動車1によれば、運転手がアクセル操作を行うと、該アクセル操作及びその操作量がアクセルポテンショメータ12によって検出され、この検出されたアクセル操作量に応じて、インバータ14から電動モータ3に供給される電力の電流(駆動電流)の指令値が定まり、実際に検出される駆動電流がこの指令値に近づくようにインバータ14がダイレクトに作動し、これによって、バッテリ13から電動モータ3に供給される駆動電流の値が直接的に変化するため、運転手が違和感無く、走行速度の増減速操作を行うことが可能になる。ちなみに、指令値と、その指令の直後に検出される駆動電流とが異なるのは、該駆動電流の値が、走行している道路の傾斜角度や、風速(空気摩擦)や、車輪4,6の摩擦等によっても変動するためである。言換えると、駆動電流の値には、そのような走行状態に関する情報が反映されている。本願発明では、この駆動電流の値に含まれている情報に着目し、これを利用する。
【0031】
そして、変速アクチュエータ15を介してCVT17により走行変速を行う(動力変動手段により動力変動制御を行う)走行制御と、モータ側クラッチ19及びエンジン側クラッチ18を介した走行モードの切換制御と、発電側クラッチ21を介した充填モードと非充電モードとの切換制御を、マイコン等からなる制御部22(図2参照)によって行う。
【0032】
図2は、本自動車に搭載された制御部のブロック図である。
制御部22の入力側には、インバータ14からの上記駆動電流の値をフィルタ20を介して検出する電流センサ(電流値検出手段)23と、デフ7、8の伝動上流側に設置されて走行速度(車速)を検出する車速センサ(検出手段)26と、モータ側クラッチ19の断続を検出するモータ側クラッチセンサ27と、エンジン側クラッチ18の断続を検出するエンジン側クラッチセンサ28と、発電側クラッチ21の断続を検出する発電側クラッチセンサ29と、CVT17のその時点での変速比を検出する変速ポテンショメータ31と、電動モータ3の温度を検出する温度センサ(温度検出手段)32と、バッテリ13の残量を検出するバッテリ残量検出手段33とが、接続されている。
【0033】
ちなみに、インバータ14は、電動モータ3が直流モータの場合にはPWM制御の直流電圧を生成し、電動モータ3が交流モータ3の場合には三相交流電圧を生成する。また、フィルタ20は、インバータ14から出力される駆動電流から、所定の物理量(例えば、PWM制御された駆動電流の平均値、三相交流の駆動電流のd軸成分とq軸成分)を抽出し、この物理量を電流センサ23によって検出する。これによって検出精度や制御性能が向上する。
【0034】
制御部22の出力側には、変速アクチュエータ15と、作動油の供給・排出によってモータ側クラッチ19を断続作動させる油圧等バルブからなるモータ側クラッチ断続手段34と、作動油の供給・排出によってエンジン側クラッチ18を断続作動させる油圧バルブ等からなるエンジン側クラッチ断続手段36と、作動油の供給・排出によって発電側クラッチ21を断続作動させる油圧バルブ等からなる発電側クラッチ断続手段37と、エンジン2を始動・停止させるエンジン始動・停止手段38とが接続されている。
【0035】
制御部22は、走行状態によって走行モードの切換を行うとともに、バッテリ13の残量によって充電モードと非充電モードとの切換を行う。例えば、バッテリ13の残量が少なくなった場合にはエンジン走行モード、バッテリ13の残量が多い場合にはモータ走行モードへの切換を行ってもよいし、車速が低速の場合には、モータ走行モード、車速が高速の場合にはエンジン走行モードへの切換を行う等の切換制御を行う。また、バッテリ13の残量が少なくなった場合には充電モード、バッテリ13の残量が多い場合には非充電モードへの切換を行ってもよい。
【0036】
この他、この制御部22は、モータ走行モードでの走行時におけるエネルギー効率を向上(具体的には、走行時におけるバッテリ13の電力消費量を低下)させるために、前記走行制御を行う。
【0037】
図3は、制御部が行う走行制御の処理フロー図である。
制御部22は、所定時間毎(具体的には、0.001〜0.5秒間隔)に、この制御を実行する。処理が開始されると、ステップS1に進む。ステップS1では、エンジン側クラッチセンサ28によって、エンジン側クラッチ18の断続検出を行い、エンジン側クラッチ18が接続状態であれば、モータ走行モードに切換えられている状態ではないため、処理を終了させる一方で、エンジン側クラッチ18が切断状態であれば、ステップS2に進む。
【0038】
ステップS2では、モータ側クラッチセンサ27によって、モータ側クラッチ19の断続検出を行い、モータ側クラッチ19が切断状態であれば、モータ走行モードに切換えられている状態ではないため、処理を終了させる一方で、モータ側クラッチ19が接続状態であれば、モータ走行モードに切換えられている状態であるため、ステップS3に進む。
【0039】
このようにステップS1→ステップS2→ステップS3と処理が進むと、該ステップS3→・・・以降の処理で、省エネ走行制御が実行される。すなわち、走行モードがモータ走行モードになっている場合のみ、制御部22に設けられた省エネ走行制御が実行される。
【0040】
ステップS3では、電流センサ23によって駆動電流の値を検出し、ステップS4に進む。ステップS4では、車速センサ26によって車速を検出し、ステップS5に進む。ステップS5では、温度センサ32によって電動モータ3の温度を検出し、ステップS6に進む。ステップS6では、自動車1の車両の特性及び電動モータ3の特性が各種パラメータとして含まれるようにして前もって求められたパワー損失式に、検出された駆動電流及び車速の値を代入し、ステップS7に進む。
【0041】
ちなみに、パワー損失式は、制御対象であるCVTに基づいて定まる車輪4,4への変速比(制御値)を変数としており、検出された駆動電流及び車速の値が代入されることにより、制御値のみを変数とするパワー損失式が求まる。この他、上記パラメータのうち、少なくとも電動モータ3に関するパラメータであって、温度に左右されるものは、前記検出された温度によって、その値を変化させる。このパワー損失式の詳細は後述する。
【0042】
ステップS7では、パワー損失式に基づき、走行時の損失パワーを最小にする(小さくする)方程式を導出し、この方程式を解くことによって制御値を求め、ステップS8に進む。ステップS8では、上記求められた制御値が、実際の制御値(具体的には、変速ポテンショメータ31によって検出される制御値)と同一又は最も近い値になるように、変速アクチュエータ15によってCVT17の変速制御を行い、処理を終了させる。
【0043】
該構成によれば、その時点での、アクセル操作量と、車速と、駆動電流の値に反映された道路の傾斜や車輪3,4の摩擦や風速等とに応じて、パワー損失を最小又は小さくする制御値が適宜算出され、これによってCVT17が適宜、動力変動制御されるため、走行時におけるエネルギー効率を向上させることができる。
【0044】
なお、上述した例では、電動モータ3から車輪4,4に伝動される動力の回転数を、CVT17によって変動させ、この場合における回転数の変速比を制御値としたが、他の手段によって動力を変動させる動力変動手段を構成してもよい。
【0045】
上述の例では、ステータと、該ステータに対して同一軸で且つ回転自在なロータとを備え、駆動電流が供給されるコイル巻線をスタータに設けるとともに該コイル巻線と対向する永久磁石をロータに設けた電動モータ3等を用いたが、図2に仮想線で示すように、永久磁石の代わりに電磁石39を用いた可変磁界モータを用いてもよい。
【0046】
そして、図2及び図3に仮想線で示す通り、電磁石39に供給する励磁電流の値を変更させることにより、動力発生時に有効に作用する磁界の磁束である有効磁束を変化させ、これによって発生する動力を変動させるものであり、この電磁石39に供給される励磁電流を変化させる励磁電流発生・変動手段41が制御部の出力側に接続されている。
【0047】
この電磁石39によって上記動力変動手段が構成され、この場合の制御値は励磁電流値になり、該構成によれば、変速機構17を省略することも可能であるし、該電磁石39と変速機構17を組合せて用いてもよい。ちなみに、この制御値は、制御部22からの出力値であるため、この値を検出するために別途センサ等の検出手段を制御部22の入力側に設ける必要はない。
【0048】
また、電動モータ3でも、上記磁石として可動式の永久磁石42を用い、この永久磁石42を動力変動手段としてもよい。すなわち、この永久磁石42のコイル巻線に対する相対位置を変位させることにより、有効磁束を変化させる。
【0049】
該構成としては、例えば、上述した特許文献1に示すものであり、具体的には、図2及び図3に仮想線で示す通り、ステータをロータに対して軸方向に移動させる移動アクチュエータ43を制御部22の出力側に接続する一方で、制御部22の入力側に、永久磁石42のコイル巻線に対する変位量を検出する変位量検出手段44を接続し、この変位量を制御値とする。
【0050】
この可動式の永久磁石42によって、変速機構17を省略することも可能であるし、この可動式の永久磁石42と変速機構17を組合せてもよい。
【0051】
次に、パワー損失式について説明する。
まず、動力変動手段としてCVT17のみを用いた場合のパワー損失式について、説明する。駆動電流をibとし、駆動モータ3のトルク定数をKとし、電動モータ3の回転数に対する車速の比である変速比をnとすると、自動車1の駆動力Fpは以下の式で表される。
【0052】
【数1】
【0053】
また、車速をv、車体の質量をMb、電動モータ3の慣性モーメントをHm、走行時の加速度をa、空気圧力抵抗係数をFa、転がり抵抗力をFr、走行面の水平面に対する傾斜をΦ、傾斜Φ時における重力をG(Φ)とすると、運動方程式は以下の式で表される。ちなみに、以下の式におけるMb+n2Hmは車体の等価質量を意味している。
【0054】
【数2】
【0055】
ここで、減速時における運動エネルギーの減少分や、下り坂走行時における位置エネルギーの減少分は、上述した回生充電機能により、電気エネルギーに変換され、バッテリ13に蓄えられるものとする。そして、パワー損失をpとし、電動モータ3の電気抵抗をRとし、電動モータ3のヒステリシス損係数をHyとし、電動モータ3の過電流損係数をEdとし、インバータ14の順方向電圧降下をVdとすると、このパワー損失pは、ここでは、熱損失と同義であるため、この熱損失を求めるパワー損失式は以下のように表される。
【0056】
【数3】
【0057】
すなわち、パワー損失を、電動モータ3の抵抗熱及びヒステリシス損と、インバータ14の順方向電圧降下による損失と、車両の空気抵抗よる損失と、車輪4の転がり抵抗による損失とで、モデル化する。ここで、駆動電流ibが変速比nに線形的に依存することに注意すると、このパワー損失式において、変速比nを変数とした場合、パワー損失pを最小するには、以下の方程式を解く必要がある。
【0058】
【数4】
【0059】
具体的には、以下の2次方程式になる。
【0060】
【数5】
【0061】
この変速比nについての2次元方程式を解くことにより、パワー損失pを最小とする変速比nが求まり、実際の変速比が、この求められた該変速比nと同一又は近くなるように、CVT17の変速制御が制御部22を介して行われる。
【0062】
続いて、動力変動手段として電磁石39を用いた場合のパワー損失式について、説明する。励磁電流をifとし、駆動モータ3のトルク定数をkとし、変速比をnとすると、自動車1の駆動力Fpは以下の式で表される。ちなみに、CVT17はここでは制御対象としないため、変速比nは固定値になる。
【0063】
【数6】
【0064】
そして、運動方程式は上述した例と同一になり、電磁石39の抵抗をRfとすると、パワー損失式は以下の通り表される。
【0065】
【数7】
【0066】
すなわち、前記の例に、電磁石の抵抗熱の損失を加えて、パワー損失式がモデル化される。また、このモデル式において、励磁電流ifを変数とした場合、パワー損失pを最小するには、以下の方程式を解く必要がある。
【0067】
【数8】
【0068】
具体的には、以下の2次方程式になる。
【0069】
【数9】
【0070】
この励磁電流ifについての2次元方程式を解くことにより、パワー損失pを最小とする励磁電流ifが導出され、実際の励磁電流が、前記導出された該励磁電流ifと同一又は近くなるように、制御部22を介して励磁電流の制御が行われる。
【0071】
続いて、動力変動手段として可動する永久磁石42のみを用いた場合のパワー損失式について、説明する。永久磁石42の変位量をθとした場合、運動方程式は、以下の式により算出される。
【0072】
【数10】
【0073】
さらに、パワー損失式は、以下のようになる。
【0074】
【数11】
【0075】
そして、駆動電流ibは変位量θによって変動することに留意して、このパワー損失pを最小とするθを求める式は、以下の通りになる。
【0076】
【数12】
【0077】
この方程式も、変位量θのみを変数とする代数方程式であるため、制御部22によって容易に数値解又はこの数値解に近い値を求めることができる。
【0078】
また、この可動式の永久磁石42を用いた動力変動手段に、CVT17を組合せる場合にも、以下の運動方程式及びパワー損失式が求められる。
【0079】
【数13】
【0080】
このパワー損失pを最小とする変位量θ及び変速比nを求める式は、以下の通りになる。
【0081】
【数14】
【0082】
この連立方程式を解いて数値解を求めれば、パワー損失pを最小とする変位量θ及び変速比nが求まる。
【0083】
さらに、この電磁石39を用いた動力変動手段に、CVT17を組合せる場合にも、同様の手法によって、このパワー損失pを最小とする励磁電流if及び変速比nの値を求めることが可能である。
【符号の説明】
【0084】
3 電動モータ(動力源)
4 前輪(車輪)
9 伝動装置
10 電力供給装置
12 アクセルポテンショメータ(アクセル操作検出手段)
17 CVT(動力電動手段,変速機構)
22 制御部(マイコン)
23 電流センサ(電流値検出手段)
26 車速センサ(車速検出手段)
32 温度センサ(温度検出手段)
39 電磁石(動力変動手段)
42 永久磁石(動力変動手段)
【特許請求の範囲】
【請求項1】
電動モータ(3)に電力を供給する電力供給装置(10)と、電動モータ(3)からの動力を車輪(4)に伝動する伝動装置(9)と、電力供給装置(10)から電動モータ(3)に供給される駆動電流の値を検出する電流値検出手段(23)と、車速を検出する車速検出手段(26)とを備え、車輪(4)に伝動される動力を変化させる動力変動手段を前記電動モータ(3)又は前記伝動装置(9)に設け、動力変動手段を介して車輪(4)の駆動を制御する制御部(22)を設けた自動車において、アクセル操作検出手段(12)で検出されるアクセル操作量によって駆動電流の指令値が定まるように電力供給装置(10)を構成し、車両及び電動モータ(3)の特性に基づき、走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪(4)に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御する省エネ走行制御を前記制御部(22)に設け、該制御部(22)は、電動モータ(3)からの動力のみによって車輪(4)が駆動されている間のみ、省エネ走行制御を実行する省エネ走行機能付き自動車。
【請求項2】
電動モータ(3)から車輪(4)に伝動される動力を変速する変速機構(17)を伝動装置(9)に設けることにより動力変動手段を構成し、制御値が電動モータ(3)から車輪(4)に動力を伝動する場合における変速比の値になる請求項1記載の省エネ走行機能付き自動車。
【請求項3】
励磁電流の変更より電動モータ(3)内の磁界を変動させる電磁石(39)によって前記動力変動手段を構成し、制御値が上記励磁電流の値になる請求項1又は2の何れかに記載の省エネ走行機能付き自動車。
【請求項4】
電動モータ(3)内での変位により電動モータ(3)内の磁界を変動させる永久磁石(42)によって前記動力変動手段を構成し、制御値が永久磁石(42)の変位量になる請求項1又は2の何れかに記載の省エネ走行機能付き自動車。
【請求項5】
電動モータ(3)の温度を検出する温度検出手段(32)を設け、制御部(22)は、省エネ走行モードの実行中、温度検出手段(32)により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させる請求項1乃至4の何れかに記載の省エネ走行機能付き自動車。
【請求項6】
電流値検出手段(23)は、フィルタ(20)を介して、上記駆動電流の値を検出する請求項1乃至5の何れかに記載の省エネ走行機能付き自動車。
【請求項1】
電動モータ(3)に電力を供給する電力供給装置(10)と、電動モータ(3)からの動力を車輪(4)に伝動する伝動装置(9)と、電力供給装置(10)から電動モータ(3)に供給される駆動電流の値を検出する電流値検出手段(23)と、車速を検出する車速検出手段(26)とを備え、車輪(4)に伝動される動力を変化させる動力変動手段を前記電動モータ(3)又は前記伝動装置(9)に設け、動力変動手段を介して車輪(4)の駆動を制御する制御部(22)を設けた自動車において、アクセル操作検出手段(12)で検出されるアクセル操作量によって駆動電流の指令値が定まるように電力供給装置(10)を構成し、車両及び電動モータ(3)の特性に基づき、走行時のパワー損失を求めるモデル式を前もって求め、検出される車速及び駆動電流の値によって、車輪(4)に伝動する動力を変化させるための制御値のみが変数となるモデル式を導出し、該モデル式からパワー損失を小さくする制御値を求め、該求められた制御値に基づいて、パワー損失が小さくなるように動力変動手段を制御する省エネ走行制御を前記制御部(22)に設け、該制御部(22)は、電動モータ(3)からの動力のみによって車輪(4)が駆動されている間のみ、省エネ走行制御を実行する省エネ走行機能付き自動車。
【請求項2】
電動モータ(3)から車輪(4)に伝動される動力を変速する変速機構(17)を伝動装置(9)に設けることにより動力変動手段を構成し、制御値が電動モータ(3)から車輪(4)に動力を伝動する場合における変速比の値になる請求項1記載の省エネ走行機能付き自動車。
【請求項3】
励磁電流の変更より電動モータ(3)内の磁界を変動させる電磁石(39)によって前記動力変動手段を構成し、制御値が上記励磁電流の値になる請求項1又は2の何れかに記載の省エネ走行機能付き自動車。
【請求項4】
電動モータ(3)内での変位により電動モータ(3)内の磁界を変動させる永久磁石(42)によって前記動力変動手段を構成し、制御値が永久磁石(42)の変位量になる請求項1又は2の何れかに記載の省エネ走行機能付き自動車。
【請求項5】
電動モータ(3)の温度を検出する温度検出手段(32)を設け、制御部(22)は、省エネ走行モードの実行中、温度検出手段(32)により検出される温度によって、上記モデル式に含まれるパラメータの少なくとも一部を変動させる請求項1乃至4の何れかに記載の省エネ走行機能付き自動車。
【請求項6】
電流値検出手段(23)は、フィルタ(20)を介して、上記駆動電流の値を検出する請求項1乃至5の何れかに記載の省エネ走行機能付き自動車。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−85373(P2013−85373A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223548(P2011−223548)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(504155293)国立大学法人島根大学 (113)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(504155293)国立大学法人島根大学 (113)
【Fターム(参考)】
[ Back to top ]