
省燃費運転評価システム及び省燃費運転評価システム用プログラム
【課題】 登り坂と下り坂とが波状的に繰り返す道路であっても、省燃費運転に適した運転であるか否かを適切に評価可能とする。
【解決手段】 車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータΔEを検出し、このパラメータΔEと予めROMに記憶され得いる評価用パラメータとを比較して評価を決定する。
【解決手段】 車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータΔEを検出し、このパラメータΔEと予めROMに記憶され得いる評価用パラメータとを比較して評価を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システム及び省燃費運転評価システム用プログラムに関するものである。
【背景技術】
【0002】
加減速を波状的に繰り返す、いわゆる波状運転は、車両燃費(=走行距離/消費燃料)の悪化を招くことから、例えば、特許文献1に記載の発明では、波状運転を検出したときに、運転者に対してその旨のアドバイスを行うことにより、省燃費運転を運転者に促している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−032522号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、波状運転であるか否かのみに基づいて運転を評価しているので、適切な評価をすることができない場合がある。
例えば、登り坂と下り坂とが波状的に繰り返す道路では、アクセルペダルの踏み込み量を一定に保っても、車両の速度は、道路の勾配変化とともに波状的に変化する。このため、省燃費運転評価システムから見ると、恰も波状運転がされたように判断されてしまうので、適切な評価をすることができない。
本発明は、上記点に鑑み、省燃費運転に適した運転であるか否かを適切に評価可能とすることを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上記目的を達成するために、請求項1に記載の発明では、省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システムであって、駆動源が車両を走行させるための駆動力を発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段と、運転を評価するための評価用パラメータが記憶されている記憶手段と、評価用パラメータとパラメータとを比較して評価を決定する評価決定手段とを備えることを特徴とする。
【0006】
これにより、請求項1に記載の発明では、重力による車両の運動エネルギー増加率を減じたパラメータを用いて運転を評価するので、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
【0007】
請求項2に記載の発明では、パラメータは、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に、車両の走行に伴って発生する損失の変化率を加算した値に応じて変化する値であることを特徴とする。
【0008】
これにより、請求項2に記載の発明では、より適切な運転評価をすることが可能となる。
なお、請求項3に記載の発明では、車両の走行に伴って発生する損失には、少なくとも走行用タイヤにて発生する転がり抵抗が含まれることを特徴とする。
【0009】
請求項4に記載の発明では、コンピュータを省燃費運転に適した減速運転であるか否かを評価するための省燃費運転評価システムとして作動させるためのプログラムであって、車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段、運転を評価するための評価用パラメータが記憶されている記憶手段、並びに評価用パラメータとパラメータとを比較して評価を決定する評価決定手段として機能させることを特徴とする。
【0010】
これにより、請求項4に記載の発明では、請求項1に記載の発明と同様に、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
因みに、上記各手段等の括弧内の符号は、後述する実施形態に記載の具体的手段等との対応関係を示す一例であり、本発明は上記各手段等の括弧内の符号に示された具体的手段等に限定されるものではない。
【図面の簡単な説明】
【0011】
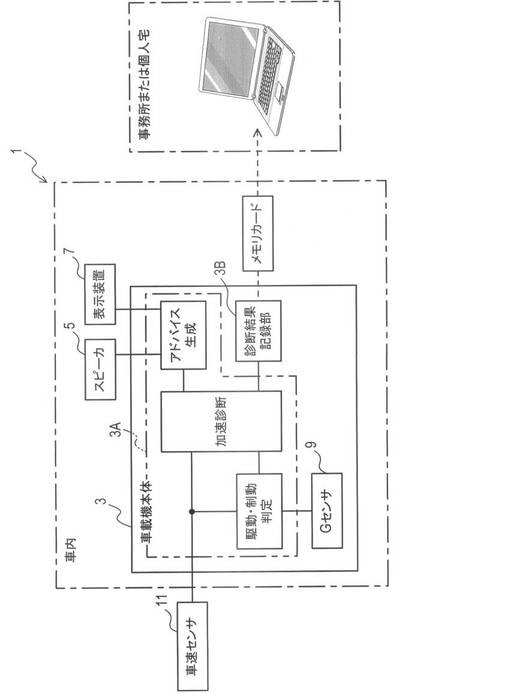
【図1】本発明の第1実施形態に係る省燃費運転評価システムを示す図である。
【図2】評価手法の概念を説明するための図である。
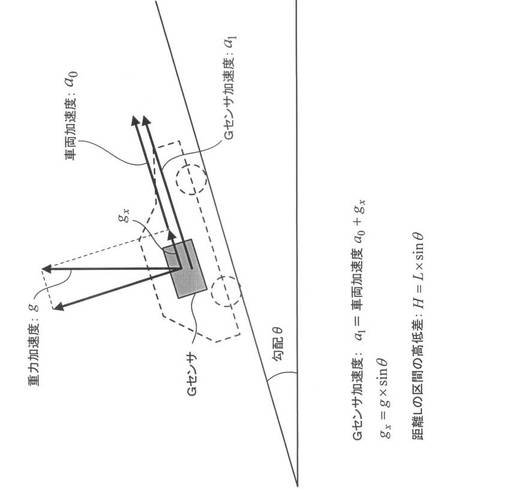
【図3】勾配(sinθ)を算出方法の説明図である。
【図4】ΔEの算出制御フローチャートである。
【図5】評価マップである。
【図6】一定時間内における単位距離当たりのエネルギー増加量パラメータE算出制御フローチャートである。
【図7】駆動状態及び制動状態の判定手法の概念を説明するための図である。
【図8】駆動・制動状態判定制御フローチャートである。
【図9】走行状態の判定手法の概念を説明するための図である。
【図10】発進・定常走行状態の判定制御フローチャートである。
【図11】省燃費運転評価システムの全体作動を示すフローチャートである。
【図12】本発明の第2実施形態に係る省燃費運転評価システムを示す図である。
【図13】駆動状態及び制動状態の判定手法の概念を説明するための図である。
【図14】本発明の第3実施形態に係る省燃費運転評価システムを示す図である。
【発明を実施するための形態】
【0012】
本実施形態は、本発明に係る省燃費運転評価システム及び当該システム用のプログラムを普通乗用車に適用したものである。この省燃費運転評価システムは、省燃費運転に適した運転であるか否かを評価し、その評価結果を運転者等に音声又は画像にて通知するものである。以下に本発明の実施形態を図面と共に説明する。
【0013】
(第1実施形態)
1.省燃費評価システムの構成
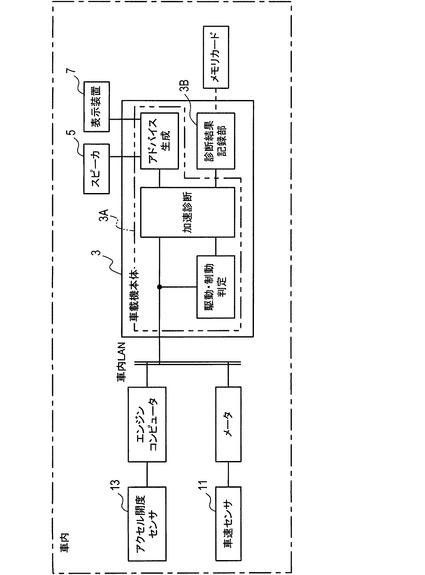
省燃費評価システム1は、図1に示すように、車載機本体3、音声出力用のスピーカ5、画像情報を表示する表示装置7、及び車両進行方向の加速度を検出する加速度センサ(以下、Gセンサと記す。)9等から構成されており、車載機本体3には、制御部3A及びカードスロット部(診断結果記録部)3Bが設けられている。
【0014】
制御部3Aは、CPU、RAM及びROM等からなるマイクロコンピュータにて構成されたものであり、この制御部3Aには、Gセンサ9からの出力信号及び車両に搭載された車速を検出する車速センサ11からの出力信号等が入力されている。
【0015】
なお、制御部3Aの主な機能は、「駆動・制動判定」、「加速診断」及び「評価結果(アドバイス)の生成」等である。そして、本実施形態では、これらの機能をROM等の不揮発性記憶手段(以下、ROMという。)に予め記憶されているプログラムに従ってソフトウェアにて実現しているが、専用のハードウェア(カスタムLSI)にて実現してもよい。
【0016】
そして、制御部3Aは、Gセンサ9及び車速センサ11からの信号、並びにROMに予め記憶されているプログラムに従って運転を評価し、その結果をスピーカ5又は表示装置7を介して運転者等に通知するとともに、カードスロット部3Bに装着されたメモリカード等の診断結果記録部に書き込む。
【0017】
なお、メモリカードとは、車載機本体3に対して着脱可能な記憶手段であり、通常、フラッシュメモリ等の半導体からなる不揮発性記憶手段が内蔵されたものである。一方、カードスロット部3Bは、少なくともメモリカードに情報(評価結果等)を書き込む機能を有する書き込み手段である。このため、運転者等は、メモリカードを介して自宅等に設置されているコンピュータに評価情報等を取り込むことができる。
【0018】
2.運転の評価手法
2.1.評価手法の概略
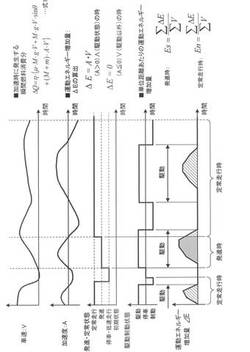
質量Moの物体が速度Voで運動していときの運動エネルギーKoは、周知のごとく、Ko=(Mo・Vo2)/2 である。そして、運動エネルギーKoの変化率、つまり運動エネルギーKoを時間Tで微分した値は、ΔKo/ΔVo=Mo・Vo・ΔVo/ΔTとなる。このとき、ΔVo/ΔTは車両の加速度Aを示すので、運動エネルギーKoの変化率は、以下の式0となる。
【0019】
ΔKo/ΔVo=Mo・A・Vo 式0
ここで、車両の質量をMとし、車両を加速させる際に動かす必要のある駆動部分、例えば、エンジン内のフライホイール、クランクシャフト、変速機内のギア及び車輪等を動かす際に要する見掛けの重量増加分をmとし、車速をVとし、走行用タイヤにて発生する転がり抵抗係数をμとし、重力加速度をgとし、燃料消費効率をηとすると、車両加速時に発生する瞬間の燃料消費量ΔQは、以下の数式により表すことができることが試験的・経験的に知られている(図2参照)。因みに、mは一般に回転部相当重量と呼ばれる。
【0020】
ΔQ=η・{μ・M・g・V+M・g・V・sinθ+(M+m)・A・V} 式1
但し、θは、道路の勾配を示し、上り勾配を正(+)とし、下り勾配を負(−)とする。
【0021】
アクセルペダルの踏み込み量を一定に保っても、勾配のある区間を走行している場合の車両の速度は、道路の勾配変化とともに変化する。そして、下り勾配の区間を走行している場合には、アクセルペダルの踏み込み量に対して車速が大きくなる。そこで、式1では、重力による車両の運動エネルギー増加率を減じている。
【0022】
一方、上り勾配の区間を走行している場合には、アクセルペダルの踏み込み量に対して車速が小さくなり、車両加速時に発生する瞬間の燃料消費量ΔQは、車速V及び加速度Aにより決定される。そこで、以下の式2にて定義されるパラメータΔEでは、少なくとも上り勾配の区間においては、車速V及び加速度AのみでパラメータΔEを決定している。
【0023】
ところで、式0と式1とから明らかなように、運動エネルギーKoの変化率は、車両加速時に発生する瞬間の燃料消費量ΔQと相関関係を有する物理量であることが解る。
ここで、車両の質量Mは定数であり、回転部相当重量mはギア段毎に決まる定数であることから、本実施形態では、車両の運動エネルギー変化率に応じて変化するパラメータΔEとして、以下の式2を定義する。
【0024】
ΔE=δ・(μ+sinθ)・V・g+A・V 式2
但し、(μ+sinθ)<0のときδ=1、(μ+sinθ)≧0のときδ=0とする。
【0025】
なお、(μ+sinθ)の大きさが0以上であるか否かに基づいて、重力による車両の運動エネルギー増加率を減じるか否かを決定する理由は、以下の通りである。
すなわち、下り勾配を走行している場合において、走行用タイヤにて発生する転がり抵抗(以下、単に転がり抵抗という。)による運動エネルギーの減少率の絶対値と重力による車両の運動エネルギー増加率の絶対値とが同一であるときには、重力による車両の運動エネルギー増加が転がり抵抗により相殺される。
【0026】
そこで、本実施形態では、(μ+sinθ)<0のときにはδ=1として、運動エネルギーKoの変化率を質量Mで除した値から重力による車両の運動エネルギー増加率を減じた値をパラメータΔEとしている。一方、(μ+sinθ)≧0のときにはδ=0として、運動エネルギーKoの変化率を質量Mで除した値パラメータΔEとしている。
【0027】
因みに、sinθは以下の手法にて算出する。すなわち、Gセンサ9が検出する加速度a1は、図3に示すように、車両進行方向の加速度aoと重力加速度に対する慣性力のうち車両進行方向と平行な方向成分gxとの合わせたものである。したがって、a1=ao+gxとなり、gx=g・sinθとなる。そこで、これらの式からsinθを算出する。
【0028】
また、式2は瞬間の燃料消費量と相関関係を有する物理量であることから、以下の式3により、単位距離当たりの燃料消費量、つまり車両燃費の逆数を運動エネルギー増加量パラメータEとして定義することができる。
【0029】
E=ΣΔE/ΣV 式3
ところで、燃料は車両が駆動状態にあるとき、つまり車両を走行させるための駆動力をエンジンが発生している状態にあるときに消費されるが、式3又は式2では、下り坂を走行している場合のように車両が駆動状態でない場合、つまり燃料を消費していない場合であっても、加速に伴って運動エネルギーの増加し、燃料が消費されているものとみなされてしまう。
【0030】
そこで、車両が駆動状態であって、かつ、車両の加速度Aが0より大きい場合には、ΔEを式2から算出し、一方、車両が非駆動状態であるとき、又は車両の加速度Aが0以下である場合には、ΔE=0とする。
【0031】
具体的には、図4に示すように、車両が駆動状態であって、かつ、車両の加速度Aが0より大きい状態である条件を満たすか否かが判定され(S1)、当該条件を満たすと判定された場合には(S1:YES)、ΔE=A・Vとされる(S3)。
【0032】
一方、当該条件を満たさないと判定された場合には(S1:NO)、ΔE=0とされる(S5)。そして、S3又はS5にて決定されたパラメータΔE、その時の車速、及び走行状態がRAMに一時的に記憶された後(S7)、本制御が終了する。
【0033】
因みに、図4に示す制御(ΔEの算出制御)を実行するためのプログラムはROMに記憶されており、この制御は制御部3Aにて実行される。
なお、本実施形態に係る省燃費運転評価システムは、省燃費運転に適した運転であるか否かを評価するシステムであるので、アイドリング運転により消費される燃料は、評価の対象としていない。
【0034】
したがって、アクセルペダルの踏み込み量が0又は0より大きい所定踏み込み量(以下、0又は0より大きい所定踏み込み量を総称して駆動判定閾値という。)未満となり、エンジンがアイドリング運転となったときには、車両が非駆動状態になったものとみなしている。
【0035】
ところで、発進時は、走行道路毎に適した速度まで加速する必要があり、当該速度まで加速せざるを得ない。また、燃料消費を下げるべく、定常走行時はできる限り一定速度での走行が望ましい。そこで、図5に示すように、「発進走行状態」と「定常走行状態」とに分けて最終的な評価結果を決定する。
【0036】
なお、本実形態では、アイドリング運転により消費される燃料は、評価の対象としていないことから、「停車又は低速走行状態」は評価の対象としない。
つまり、パラメータΔEを算出するとともに、その算出したパラメータΔEを発進走行状態時と定常走行状態とに区別しながら積算することにより、「発進走行状態」の運動エネルギー増加量パラメータEsと「定常走行状態」の運動エネルギー増加量パラメータEnとを個々に算出し、発進走行状態及び定常走行状態毎にROMに記憶されている評価用パラメータとパラメータEs、Enとを比較して最終的な評価結果を決定する。
【0037】
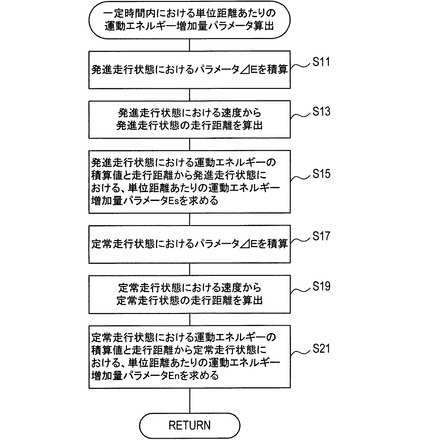
なお、運動エネルギー増加量パラメータEs、Enの算出は、具体的には図6に示すように、発進走行状態のパラメータΔEが積算され(S11)、かつ、発進走行状態の速度が積算(積分)されて発進走行状態の走行距離が算出された後(S13)、式3に従って発進走行状態のエネルギー増加量パラメータEsが算出される(S15)。
【0038】
また、定常走行状態のパラメータΔEが積算され(S17)、かつ、定常走行状態の速度が積算(積分)されて定常走行状態の走行距離が算出された後(S19)、式3に従って定常走行状態のエネルギー増加量パラメータEnが算出される(S21)。
【0039】
因みに、図6に示す「一定時間内における単位距離当たりのエネルギー増加量パラメータEの算出」制御を実行するためのプログラムはROMに記憶されており、本制御は制御部3Aにて実行される。
【0040】
2.2.走行状態等の定義及び判定
<駆動状態及び制動状態(非駆動状態)>
駆動状態であるか否かは、原則として、アクセルペダルの踏み込み量が駆動判定閾値以上の場合は駆動状態として判定され、一方、踏み込み量が駆動判定閾値未満の場合は制動状態(非駆動状態)として判定される。
【0041】
しかし、本実施形態では、制御部3Aに踏み込み量に関する信号が入力されていないので、Gセンサ9の出力信号を用いて駆動状態であるか否か判定している。
すなわち、図7に示すように、Gセンサ9により検出された加速度がプラス方向(前進向き)に上昇変化している場合にあっては、加速度が0以上の所定値(駆動判定閾値)を超えた時以降が駆動状態と判定され、加速度がマイナス方向(後退向き)に下降変化している場合にあっては、加速度が0以下の所定値(制動判定閾値)未満となった時以前が駆動状態と判定される。
【0042】
一方、加速度がマイナス方向に下降変化している場合にあっては、加速度が制動判定閾値を未満となった時以降が制動状態(非駆動状態)として判定され、加速度がプラス方向に上昇変化している場合にあっては、加速度が駆動判定閾値以上となった時以前が制動状態(非駆動状態)として判定される。
【0043】
具体的には、図8に示す駆動・制動状態判定制御に従って判定される。なお、判定制御を実行するためのプログラムはROMに格納されている。すなわち、本制御が起動されると、先ず、車速センサ11からの信号に基づく車速が検出された後(S31)、Gセンサ9から信号に基づいて加速度が検出される(S33)。
【0044】
次に、車速が予め設定された「停車・低速走行判定速度VL」より低いか否かが判定され(S35)、車速が「停車・低速走行判定速度VL」より低いと判定された場合には(S35:YES)、車両の走行状態が「停車又は低速走行状態」である旨を示すフラグがRAMに設定された後(S37)、本制御が終了する。
【0045】
一方、車速が「停車・低速走行判定速度VL」以上であると判定された場合には(S35:NO)、加速度が制動判定閾値未満となったか否かが判定され(S39)、加速度が制動判定閾値未満となったと判定された場合には(S39:YES)、車両の走行状態が「制動状態」である旨を示すフラグがRAMに設定された後(S41)、本制御が終了する。
【0046】
また、加速度が制動判定閾値以上であると判定された場合には(S39:NO)、加速度が駆動判定閾値を超えたか否かが判定され(S43)、加速度が駆動判定閾値を超えたと判定された場合には(S43:YES)、車両の走行状態が「駆動状態」である旨を示すフラグがRAMに設定された後(S45)、本制御が終了する。
【0047】
一方、加速度が駆動判定閾値以下であると判定された場合には(S43:NO)、走行状態を示すフラグが再設定されることなく(S47)、現在の状態が維持されたまま本制御が終了する。因みに、走行状態を示すフラグが設定されていない場合には、その設定されていない状態が維持される。
【0048】
なお、Gセンサ9は、車両に発生する加速度に伴った自身に作用する力(慣性力)に基づいて加速度を検出するので、例えば、急な上り勾配を車両が登坂していた場合には、アクセルが踏み込まれて燃料が消費されているにも拘わらず重力の影響で少しずつ減速するときがあるが、このような場合であっても、Gセンサ9は、加速時と同様にプラス方向の値を出力する。
【0049】
また、アクセルを踏み込まず燃料を消費していない状態で下り勾配を走行した場合には、車両が重力の影響により加速するときがあるが、このような場合、Gセンサ9は、ゼロまたはマイナス方向の値を出力する。したがって、Gセンサ9にて駆動状態であるか否か判定した場合であっても、アクセルペダルの踏み込み量に基づいて駆動状態であるか否か判定した場合と同じ結果を得ることができる。
【0050】
<走行状態の判定>
走行状態は、以下の定義に従って制御部3Aにて判定される。
すなわち、図9に示すように、車速センサ11により検出された車速が予め設定された「停車・低速走行判定速度VL」より低いときには車両の走行状態が「停車又は低速走行状態」であると判定され、「停車又は低速走行状態」が判定された後、「駆動状態」となったときに走行状態が「発進走行状態」であると判定される。
【0051】
また、車速が予め設定された「定常走行判定速度VH」(≧VL)より大きく、かつ、車両の加速度が予め設定された所定加速度Ao以上の状態から当該所定加速度Ao未満となった時以降の走行状態が「定常走行状態」として判定される。
【0052】
具体的には、図10に示す発進・定常走行状態判定制御に従って判定され、この判定制御を実行するためのプログラムはROMに格納されている。
すなわち、本制御が起動されると、先ず、車速センサ11により検出された車速の時間変化率が演算されて車両の加速度Aが算出された後(S51)、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となった否かが判定される(S53)。
【0053】
なお、「停車又は低速走行状態」であるか否かの判定は、RAMに「停車又は低速走行状態」を示すフラグが設定されているか否かに基づいて判定され、走行状態の判定が未だ一度も実行されていなく走行状態が未定である場合、つまり走行状態を示すフラグがRAMに設定されていない場合には、「停車又は低速走行状態」でないと判定される。
【0054】
そして、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となったと判定された場合には(S53:YES)、走行状態が「発進走行状態」であることを示すフラグがRAMに設定された後(S55)、本制御が終了する。
【0055】
一方、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となった状態でないと判定された場合には(S53:NO)、車速が「停車・低速走行判定速度VL」より低いか否かが判定され(S57)、車速が「停車・低速走行判定速度VL」より低いと判定された場合には(S57:YES)、「停車又は低速走行状態」を示すフラグがRAMに設定された後(S59)、本制御が終了する。
【0056】
また、車速が「停車・低速走行判定速度VL」以上であると判定された場合には(S57:NO)、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となったか否かが判定され(S61)、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となったと判定された場合には(S61:YES)、「定常走行状態」を示すフラグがRAMに設定された後(S63)、本制御が終了する。
【0057】
一方、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となった状態ではないと判定された場合には(S61:NO)、現在の走行状態を示すフラグが維持されたまま、本制御が終了する。
【0058】
2.3.運転評価の詳細(図11参照)
図11は、省燃費運転評価システムの全体作動を示す制御フローであり、この制御フローを実行するためのプログラムはRAMに記憶されている。そして、車両スイッチが投入されると、本制御を実行するプログラムが読み込まれて制御部3Aにて実行される。
【0059】
本制御が起動されると、先ず、「エネルギー増加量パラメータEの算出(図6)」のための「一定時間」を確定するためにタイマーカウンタの計数値が再設定(初期化)される(S71)。その後、駆動・制動状態判定(図8)がされた後(S73)、発進・定常走行状態判定(図10)されて(S75)、パラメータΔE算出(図4)される(S77)。
【0060】
次に、一定時間(本実施形態では、約1秒)が経過したか否かが判定され(S79)、一定時間が経過していないと判定された場合には(S79:NO)、再び、S73が実行され、一方、一定時間が経過したと判定された場合には(S79:YES)、一定時間内における単位距離当たりのエネルギー増加量パラメータEの算出(図6)が実行された後(S81)、その算出されたエネルギー増加量パラメータEs、En及び図5に示すマップに従って具体的な評価が決定され(S83)、その評価が運転者に音声又は文字等の画像にて報知される(S85)。
【0061】
評価結果とは、例えば、発進評価が1であれば「発進時が急加速ぎみです。ゆっくりとアクセルを踏みましょう」、定常走行評価が5であれば「定常走行時の走行が安定しています。この調子で運転を続けましょう」というような文言が音声や文字(画像)で報知される。
【0062】
なお、この際、評価結果は1回の運行で平均し、1回の運行毎に運転操作を評価したり、メモリカードに記憶された評価結果を事務所又は個人宅に持ち帰ることで、運転後に運転操作や運転レベルの推移を見ることもできる。
【0063】
3.本実施形態に係る省燃費運転評価システムの特徴
本実施形態では、車両の走行状態を、少なくとも(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態のうちいずれの状態であるかを判定し、発進走行状態及び定常走行状態毎に設定された評価判断基準に基づいて運転を評価するので、適切な評価をすることが可能となる。
【0064】
また、重力による車両の運動エネルギー増加率を減じたパラメータΔEを用いて運転を評価するので、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
【0065】
また、転がり抵抗も考慮して運転を評価するので、より適切な評価をすることが可能となる。
(第2実施形態)
第1実施形態では、Gセンサ9により検出された加速度を用いて駆動状態又は制動状態を判定したが、本実形態では、図12に示すように、アクセルペダルの踏み込み量又はスロットルバルブの開度等のエンジンへの吸気量を調節する駆動力調整手段の操作量を検出する手段(アクセル開度センサ13)を設けるとともに、図13に示すように、アクセル開度センサ13により検出されたアクセル開度が予め設定された駆動判定閾値を超えた場合に駆動状態と判定し、アクセル開度が判定閾値以下の場合に制動状態と判定するものである。
【0066】
(第3実施形態)
本実施形態は、図14に示すように、GPSを用いたカーナビゲーションシステムを備える車両に本発明を適用したものである。これにより、評価結果と併せて位置情報もメモリカードに記憶することができる。
【0067】
(その他の実施形態)
本願発明は、車両の走行状態を(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態のうちいずれの状態であるかを判定し、発進走行状態及び定常走行状態毎に設定された評価判断基準に基づいて運転を評価することを特徴とするので、(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態の具体的な定義・判定手法は、上述の実施形態に限定されるものではない。
【0068】
また、上述の実施形態では、式1に示されるように、車両の走行に伴って発生する損失として、転がり抵抗のみを考慮したが、本発明はこれに限定されるものではなく、例えば転がり抵抗に加えて空気抵抗も考慮してもよい。なお、空気抵抗は、車速の略3乗に比例して大きくなるので、車速が、例えば70km/h以上の場合には、運転の評価に大きな影響が生じる。
【0069】
また、上述の実施形態では、転がり抵抗を考慮したが、本発明はこれに限定されるものではなく、車両の走行に伴って発生する損失を考慮せずにパラメータΔEを決定してもよい。
【0070】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0071】
1…省燃費評価システム、3…車載機本体、3A…制御部、
3B…カードスロット部、5…スピーカ、7…表示装置、9…Gセンサ、
11…車速センサ。
【技術分野】
【0001】
本発明は、省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システム及び省燃費運転評価システム用プログラムに関するものである。
【背景技術】
【0002】
加減速を波状的に繰り返す、いわゆる波状運転は、車両燃費(=走行距離/消費燃料)の悪化を招くことから、例えば、特許文献1に記載の発明では、波状運転を検出したときに、運転者に対してその旨のアドバイスを行うことにより、省燃費運転を運転者に促している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−032522号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、波状運転であるか否かのみに基づいて運転を評価しているので、適切な評価をすることができない場合がある。
例えば、登り坂と下り坂とが波状的に繰り返す道路では、アクセルペダルの踏み込み量を一定に保っても、車両の速度は、道路の勾配変化とともに波状的に変化する。このため、省燃費運転評価システムから見ると、恰も波状運転がされたように判断されてしまうので、適切な評価をすることができない。
本発明は、上記点に鑑み、省燃費運転に適した運転であるか否かを適切に評価可能とすることを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上記目的を達成するために、請求項1に記載の発明では、省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システムであって、駆動源が車両を走行させるための駆動力を発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段と、運転を評価するための評価用パラメータが記憶されている記憶手段と、評価用パラメータとパラメータとを比較して評価を決定する評価決定手段とを備えることを特徴とする。
【0006】
これにより、請求項1に記載の発明では、重力による車両の運動エネルギー増加率を減じたパラメータを用いて運転を評価するので、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
【0007】
請求項2に記載の発明では、パラメータは、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に、車両の走行に伴って発生する損失の変化率を加算した値に応じて変化する値であることを特徴とする。
【0008】
これにより、請求項2に記載の発明では、より適切な運転評価をすることが可能となる。
なお、請求項3に記載の発明では、車両の走行に伴って発生する損失には、少なくとも走行用タイヤにて発生する転がり抵抗が含まれることを特徴とする。
【0009】
請求項4に記載の発明では、コンピュータを省燃費運転に適した減速運転であるか否かを評価するための省燃費運転評価システムとして作動させるためのプログラムであって、車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段、運転を評価するための評価用パラメータが記憶されている記憶手段、並びに評価用パラメータとパラメータとを比較して評価を決定する評価決定手段として機能させることを特徴とする。
【0010】
これにより、請求項4に記載の発明では、請求項1に記載の発明と同様に、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
因みに、上記各手段等の括弧内の符号は、後述する実施形態に記載の具体的手段等との対応関係を示す一例であり、本発明は上記各手段等の括弧内の符号に示された具体的手段等に限定されるものではない。
【図面の簡単な説明】
【0011】
【図1】本発明の第1実施形態に係る省燃費運転評価システムを示す図である。
【図2】評価手法の概念を説明するための図である。
【図3】勾配(sinθ)を算出方法の説明図である。
【図4】ΔEの算出制御フローチャートである。
【図5】評価マップである。
【図6】一定時間内における単位距離当たりのエネルギー増加量パラメータE算出制御フローチャートである。
【図7】駆動状態及び制動状態の判定手法の概念を説明するための図である。
【図8】駆動・制動状態判定制御フローチャートである。
【図9】走行状態の判定手法の概念を説明するための図である。
【図10】発進・定常走行状態の判定制御フローチャートである。
【図11】省燃費運転評価システムの全体作動を示すフローチャートである。
【図12】本発明の第2実施形態に係る省燃費運転評価システムを示す図である。
【図13】駆動状態及び制動状態の判定手法の概念を説明するための図である。
【図14】本発明の第3実施形態に係る省燃費運転評価システムを示す図である。
【発明を実施するための形態】
【0012】
本実施形態は、本発明に係る省燃費運転評価システム及び当該システム用のプログラムを普通乗用車に適用したものである。この省燃費運転評価システムは、省燃費運転に適した運転であるか否かを評価し、その評価結果を運転者等に音声又は画像にて通知するものである。以下に本発明の実施形態を図面と共に説明する。
【0013】
(第1実施形態)
1.省燃費評価システムの構成
省燃費評価システム1は、図1に示すように、車載機本体3、音声出力用のスピーカ5、画像情報を表示する表示装置7、及び車両進行方向の加速度を検出する加速度センサ(以下、Gセンサと記す。)9等から構成されており、車載機本体3には、制御部3A及びカードスロット部(診断結果記録部)3Bが設けられている。
【0014】
制御部3Aは、CPU、RAM及びROM等からなるマイクロコンピュータにて構成されたものであり、この制御部3Aには、Gセンサ9からの出力信号及び車両に搭載された車速を検出する車速センサ11からの出力信号等が入力されている。
【0015】
なお、制御部3Aの主な機能は、「駆動・制動判定」、「加速診断」及び「評価結果(アドバイス)の生成」等である。そして、本実施形態では、これらの機能をROM等の不揮発性記憶手段(以下、ROMという。)に予め記憶されているプログラムに従ってソフトウェアにて実現しているが、専用のハードウェア(カスタムLSI)にて実現してもよい。
【0016】
そして、制御部3Aは、Gセンサ9及び車速センサ11からの信号、並びにROMに予め記憶されているプログラムに従って運転を評価し、その結果をスピーカ5又は表示装置7を介して運転者等に通知するとともに、カードスロット部3Bに装着されたメモリカード等の診断結果記録部に書き込む。
【0017】
なお、メモリカードとは、車載機本体3に対して着脱可能な記憶手段であり、通常、フラッシュメモリ等の半導体からなる不揮発性記憶手段が内蔵されたものである。一方、カードスロット部3Bは、少なくともメモリカードに情報(評価結果等)を書き込む機能を有する書き込み手段である。このため、運転者等は、メモリカードを介して自宅等に設置されているコンピュータに評価情報等を取り込むことができる。
【0018】
2.運転の評価手法
2.1.評価手法の概略
質量Moの物体が速度Voで運動していときの運動エネルギーKoは、周知のごとく、Ko=(Mo・Vo2)/2 である。そして、運動エネルギーKoの変化率、つまり運動エネルギーKoを時間Tで微分した値は、ΔKo/ΔVo=Mo・Vo・ΔVo/ΔTとなる。このとき、ΔVo/ΔTは車両の加速度Aを示すので、運動エネルギーKoの変化率は、以下の式0となる。
【0019】
ΔKo/ΔVo=Mo・A・Vo 式0
ここで、車両の質量をMとし、車両を加速させる際に動かす必要のある駆動部分、例えば、エンジン内のフライホイール、クランクシャフト、変速機内のギア及び車輪等を動かす際に要する見掛けの重量増加分をmとし、車速をVとし、走行用タイヤにて発生する転がり抵抗係数をμとし、重力加速度をgとし、燃料消費効率をηとすると、車両加速時に発生する瞬間の燃料消費量ΔQは、以下の数式により表すことができることが試験的・経験的に知られている(図2参照)。因みに、mは一般に回転部相当重量と呼ばれる。
【0020】
ΔQ=η・{μ・M・g・V+M・g・V・sinθ+(M+m)・A・V} 式1
但し、θは、道路の勾配を示し、上り勾配を正(+)とし、下り勾配を負(−)とする。
【0021】
アクセルペダルの踏み込み量を一定に保っても、勾配のある区間を走行している場合の車両の速度は、道路の勾配変化とともに変化する。そして、下り勾配の区間を走行している場合には、アクセルペダルの踏み込み量に対して車速が大きくなる。そこで、式1では、重力による車両の運動エネルギー増加率を減じている。
【0022】
一方、上り勾配の区間を走行している場合には、アクセルペダルの踏み込み量に対して車速が小さくなり、車両加速時に発生する瞬間の燃料消費量ΔQは、車速V及び加速度Aにより決定される。そこで、以下の式2にて定義されるパラメータΔEでは、少なくとも上り勾配の区間においては、車速V及び加速度AのみでパラメータΔEを決定している。
【0023】
ところで、式0と式1とから明らかなように、運動エネルギーKoの変化率は、車両加速時に発生する瞬間の燃料消費量ΔQと相関関係を有する物理量であることが解る。
ここで、車両の質量Mは定数であり、回転部相当重量mはギア段毎に決まる定数であることから、本実施形態では、車両の運動エネルギー変化率に応じて変化するパラメータΔEとして、以下の式2を定義する。
【0024】
ΔE=δ・(μ+sinθ)・V・g+A・V 式2
但し、(μ+sinθ)<0のときδ=1、(μ+sinθ)≧0のときδ=0とする。
【0025】
なお、(μ+sinθ)の大きさが0以上であるか否かに基づいて、重力による車両の運動エネルギー増加率を減じるか否かを決定する理由は、以下の通りである。
すなわち、下り勾配を走行している場合において、走行用タイヤにて発生する転がり抵抗(以下、単に転がり抵抗という。)による運動エネルギーの減少率の絶対値と重力による車両の運動エネルギー増加率の絶対値とが同一であるときには、重力による車両の運動エネルギー増加が転がり抵抗により相殺される。
【0026】
そこで、本実施形態では、(μ+sinθ)<0のときにはδ=1として、運動エネルギーKoの変化率を質量Mで除した値から重力による車両の運動エネルギー増加率を減じた値をパラメータΔEとしている。一方、(μ+sinθ)≧0のときにはδ=0として、運動エネルギーKoの変化率を質量Mで除した値パラメータΔEとしている。
【0027】
因みに、sinθは以下の手法にて算出する。すなわち、Gセンサ9が検出する加速度a1は、図3に示すように、車両進行方向の加速度aoと重力加速度に対する慣性力のうち車両進行方向と平行な方向成分gxとの合わせたものである。したがって、a1=ao+gxとなり、gx=g・sinθとなる。そこで、これらの式からsinθを算出する。
【0028】
また、式2は瞬間の燃料消費量と相関関係を有する物理量であることから、以下の式3により、単位距離当たりの燃料消費量、つまり車両燃費の逆数を運動エネルギー増加量パラメータEとして定義することができる。
【0029】
E=ΣΔE/ΣV 式3
ところで、燃料は車両が駆動状態にあるとき、つまり車両を走行させるための駆動力をエンジンが発生している状態にあるときに消費されるが、式3又は式2では、下り坂を走行している場合のように車両が駆動状態でない場合、つまり燃料を消費していない場合であっても、加速に伴って運動エネルギーの増加し、燃料が消費されているものとみなされてしまう。
【0030】
そこで、車両が駆動状態であって、かつ、車両の加速度Aが0より大きい場合には、ΔEを式2から算出し、一方、車両が非駆動状態であるとき、又は車両の加速度Aが0以下である場合には、ΔE=0とする。
【0031】
具体的には、図4に示すように、車両が駆動状態であって、かつ、車両の加速度Aが0より大きい状態である条件を満たすか否かが判定され(S1)、当該条件を満たすと判定された場合には(S1:YES)、ΔE=A・Vとされる(S3)。
【0032】
一方、当該条件を満たさないと判定された場合には(S1:NO)、ΔE=0とされる(S5)。そして、S3又はS5にて決定されたパラメータΔE、その時の車速、及び走行状態がRAMに一時的に記憶された後(S7)、本制御が終了する。
【0033】
因みに、図4に示す制御(ΔEの算出制御)を実行するためのプログラムはROMに記憶されており、この制御は制御部3Aにて実行される。
なお、本実施形態に係る省燃費運転評価システムは、省燃費運転に適した運転であるか否かを評価するシステムであるので、アイドリング運転により消費される燃料は、評価の対象としていない。
【0034】
したがって、アクセルペダルの踏み込み量が0又は0より大きい所定踏み込み量(以下、0又は0より大きい所定踏み込み量を総称して駆動判定閾値という。)未満となり、エンジンがアイドリング運転となったときには、車両が非駆動状態になったものとみなしている。
【0035】
ところで、発進時は、走行道路毎に適した速度まで加速する必要があり、当該速度まで加速せざるを得ない。また、燃料消費を下げるべく、定常走行時はできる限り一定速度での走行が望ましい。そこで、図5に示すように、「発進走行状態」と「定常走行状態」とに分けて最終的な評価結果を決定する。
【0036】
なお、本実形態では、アイドリング運転により消費される燃料は、評価の対象としていないことから、「停車又は低速走行状態」は評価の対象としない。
つまり、パラメータΔEを算出するとともに、その算出したパラメータΔEを発進走行状態時と定常走行状態とに区別しながら積算することにより、「発進走行状態」の運動エネルギー増加量パラメータEsと「定常走行状態」の運動エネルギー増加量パラメータEnとを個々に算出し、発進走行状態及び定常走行状態毎にROMに記憶されている評価用パラメータとパラメータEs、Enとを比較して最終的な評価結果を決定する。
【0037】
なお、運動エネルギー増加量パラメータEs、Enの算出は、具体的には図6に示すように、発進走行状態のパラメータΔEが積算され(S11)、かつ、発進走行状態の速度が積算(積分)されて発進走行状態の走行距離が算出された後(S13)、式3に従って発進走行状態のエネルギー増加量パラメータEsが算出される(S15)。
【0038】
また、定常走行状態のパラメータΔEが積算され(S17)、かつ、定常走行状態の速度が積算(積分)されて定常走行状態の走行距離が算出された後(S19)、式3に従って定常走行状態のエネルギー増加量パラメータEnが算出される(S21)。
【0039】
因みに、図6に示す「一定時間内における単位距離当たりのエネルギー増加量パラメータEの算出」制御を実行するためのプログラムはROMに記憶されており、本制御は制御部3Aにて実行される。
【0040】
2.2.走行状態等の定義及び判定
<駆動状態及び制動状態(非駆動状態)>
駆動状態であるか否かは、原則として、アクセルペダルの踏み込み量が駆動判定閾値以上の場合は駆動状態として判定され、一方、踏み込み量が駆動判定閾値未満の場合は制動状態(非駆動状態)として判定される。
【0041】
しかし、本実施形態では、制御部3Aに踏み込み量に関する信号が入力されていないので、Gセンサ9の出力信号を用いて駆動状態であるか否か判定している。
すなわち、図7に示すように、Gセンサ9により検出された加速度がプラス方向(前進向き)に上昇変化している場合にあっては、加速度が0以上の所定値(駆動判定閾値)を超えた時以降が駆動状態と判定され、加速度がマイナス方向(後退向き)に下降変化している場合にあっては、加速度が0以下の所定値(制動判定閾値)未満となった時以前が駆動状態と判定される。
【0042】
一方、加速度がマイナス方向に下降変化している場合にあっては、加速度が制動判定閾値を未満となった時以降が制動状態(非駆動状態)として判定され、加速度がプラス方向に上昇変化している場合にあっては、加速度が駆動判定閾値以上となった時以前が制動状態(非駆動状態)として判定される。
【0043】
具体的には、図8に示す駆動・制動状態判定制御に従って判定される。なお、判定制御を実行するためのプログラムはROMに格納されている。すなわち、本制御が起動されると、先ず、車速センサ11からの信号に基づく車速が検出された後(S31)、Gセンサ9から信号に基づいて加速度が検出される(S33)。
【0044】
次に、車速が予め設定された「停車・低速走行判定速度VL」より低いか否かが判定され(S35)、車速が「停車・低速走行判定速度VL」より低いと判定された場合には(S35:YES)、車両の走行状態が「停車又は低速走行状態」である旨を示すフラグがRAMに設定された後(S37)、本制御が終了する。
【0045】
一方、車速が「停車・低速走行判定速度VL」以上であると判定された場合には(S35:NO)、加速度が制動判定閾値未満となったか否かが判定され(S39)、加速度が制動判定閾値未満となったと判定された場合には(S39:YES)、車両の走行状態が「制動状態」である旨を示すフラグがRAMに設定された後(S41)、本制御が終了する。
【0046】
また、加速度が制動判定閾値以上であると判定された場合には(S39:NO)、加速度が駆動判定閾値を超えたか否かが判定され(S43)、加速度が駆動判定閾値を超えたと判定された場合には(S43:YES)、車両の走行状態が「駆動状態」である旨を示すフラグがRAMに設定された後(S45)、本制御が終了する。
【0047】
一方、加速度が駆動判定閾値以下であると判定された場合には(S43:NO)、走行状態を示すフラグが再設定されることなく(S47)、現在の状態が維持されたまま本制御が終了する。因みに、走行状態を示すフラグが設定されていない場合には、その設定されていない状態が維持される。
【0048】
なお、Gセンサ9は、車両に発生する加速度に伴った自身に作用する力(慣性力)に基づいて加速度を検出するので、例えば、急な上り勾配を車両が登坂していた場合には、アクセルが踏み込まれて燃料が消費されているにも拘わらず重力の影響で少しずつ減速するときがあるが、このような場合であっても、Gセンサ9は、加速時と同様にプラス方向の値を出力する。
【0049】
また、アクセルを踏み込まず燃料を消費していない状態で下り勾配を走行した場合には、車両が重力の影響により加速するときがあるが、このような場合、Gセンサ9は、ゼロまたはマイナス方向の値を出力する。したがって、Gセンサ9にて駆動状態であるか否か判定した場合であっても、アクセルペダルの踏み込み量に基づいて駆動状態であるか否か判定した場合と同じ結果を得ることができる。
【0050】
<走行状態の判定>
走行状態は、以下の定義に従って制御部3Aにて判定される。
すなわち、図9に示すように、車速センサ11により検出された車速が予め設定された「停車・低速走行判定速度VL」より低いときには車両の走行状態が「停車又は低速走行状態」であると判定され、「停車又は低速走行状態」が判定された後、「駆動状態」となったときに走行状態が「発進走行状態」であると判定される。
【0051】
また、車速が予め設定された「定常走行判定速度VH」(≧VL)より大きく、かつ、車両の加速度が予め設定された所定加速度Ao以上の状態から当該所定加速度Ao未満となった時以降の走行状態が「定常走行状態」として判定される。
【0052】
具体的には、図10に示す発進・定常走行状態判定制御に従って判定され、この判定制御を実行するためのプログラムはROMに格納されている。
すなわち、本制御が起動されると、先ず、車速センサ11により検出された車速の時間変化率が演算されて車両の加速度Aが算出された後(S51)、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となった否かが判定される(S53)。
【0053】
なお、「停車又は低速走行状態」であるか否かの判定は、RAMに「停車又は低速走行状態」を示すフラグが設定されているか否かに基づいて判定され、走行状態の判定が未だ一度も実行されていなく走行状態が未定である場合、つまり走行状態を示すフラグがRAMに設定されていない場合には、「停車又は低速走行状態」でないと判定される。
【0054】
そして、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となったと判定された場合には(S53:YES)、走行状態が「発進走行状態」であることを示すフラグがRAMに設定された後(S55)、本制御が終了する。
【0055】
一方、現在の走行状態が「停車又は低速走行状態」であって、かつ、車両が「駆動状態」となった状態でないと判定された場合には(S53:NO)、車速が「停車・低速走行判定速度VL」より低いか否かが判定され(S57)、車速が「停車・低速走行判定速度VL」より低いと判定された場合には(S57:YES)、「停車又は低速走行状態」を示すフラグがRAMに設定された後(S59)、本制御が終了する。
【0056】
また、車速が「停車・低速走行判定速度VL」以上であると判定された場合には(S57:NO)、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となったか否かが判定され(S61)、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となったと判定された場合には(S61:YES)、「定常走行状態」を示すフラグがRAMに設定された後(S63)、本制御が終了する。
【0057】
一方、車速が「定常走行判定速度VH」より大きく、かつ、車両の加速度が加速度Ao未満となった状態ではないと判定された場合には(S61:NO)、現在の走行状態を示すフラグが維持されたまま、本制御が終了する。
【0058】
2.3.運転評価の詳細(図11参照)
図11は、省燃費運転評価システムの全体作動を示す制御フローであり、この制御フローを実行するためのプログラムはRAMに記憶されている。そして、車両スイッチが投入されると、本制御を実行するプログラムが読み込まれて制御部3Aにて実行される。
【0059】
本制御が起動されると、先ず、「エネルギー増加量パラメータEの算出(図6)」のための「一定時間」を確定するためにタイマーカウンタの計数値が再設定(初期化)される(S71)。その後、駆動・制動状態判定(図8)がされた後(S73)、発進・定常走行状態判定(図10)されて(S75)、パラメータΔE算出(図4)される(S77)。
【0060】
次に、一定時間(本実施形態では、約1秒)が経過したか否かが判定され(S79)、一定時間が経過していないと判定された場合には(S79:NO)、再び、S73が実行され、一方、一定時間が経過したと判定された場合には(S79:YES)、一定時間内における単位距離当たりのエネルギー増加量パラメータEの算出(図6)が実行された後(S81)、その算出されたエネルギー増加量パラメータEs、En及び図5に示すマップに従って具体的な評価が決定され(S83)、その評価が運転者に音声又は文字等の画像にて報知される(S85)。
【0061】
評価結果とは、例えば、発進評価が1であれば「発進時が急加速ぎみです。ゆっくりとアクセルを踏みましょう」、定常走行評価が5であれば「定常走行時の走行が安定しています。この調子で運転を続けましょう」というような文言が音声や文字(画像)で報知される。
【0062】
なお、この際、評価結果は1回の運行で平均し、1回の運行毎に運転操作を評価したり、メモリカードに記憶された評価結果を事務所又は個人宅に持ち帰ることで、運転後に運転操作や運転レベルの推移を見ることもできる。
【0063】
3.本実施形態に係る省燃費運転評価システムの特徴
本実施形態では、車両の走行状態を、少なくとも(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態のうちいずれの状態であるかを判定し、発進走行状態及び定常走行状態毎に設定された評価判断基準に基づいて運転を評価するので、適切な評価をすることが可能となる。
【0064】
また、重力による車両の運動エネルギー増加率を減じたパラメータΔEを用いて運転を評価するので、登り坂と下り坂とが波状的に繰り返す道路であっても、適切な評価をすることが可能となる。
【0065】
また、転がり抵抗も考慮して運転を評価するので、より適切な評価をすることが可能となる。
(第2実施形態)
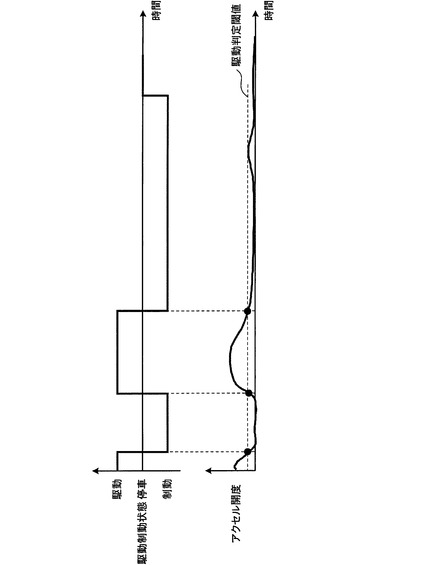
第1実施形態では、Gセンサ9により検出された加速度を用いて駆動状態又は制動状態を判定したが、本実形態では、図12に示すように、アクセルペダルの踏み込み量又はスロットルバルブの開度等のエンジンへの吸気量を調節する駆動力調整手段の操作量を検出する手段(アクセル開度センサ13)を設けるとともに、図13に示すように、アクセル開度センサ13により検出されたアクセル開度が予め設定された駆動判定閾値を超えた場合に駆動状態と判定し、アクセル開度が判定閾値以下の場合に制動状態と判定するものである。
【0066】
(第3実施形態)
本実施形態は、図14に示すように、GPSを用いたカーナビゲーションシステムを備える車両に本発明を適用したものである。これにより、評価結果と併せて位置情報もメモリカードに記憶することができる。
【0067】
(その他の実施形態)
本願発明は、車両の走行状態を(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態のうちいずれの状態であるかを判定し、発進走行状態及び定常走行状態毎に設定された評価判断基準に基づいて運転を評価することを特徴とするので、(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態の具体的な定義・判定手法は、上述の実施形態に限定されるものではない。
【0068】
また、上述の実施形態では、式1に示されるように、車両の走行に伴って発生する損失として、転がり抵抗のみを考慮したが、本発明はこれに限定されるものではなく、例えば転がり抵抗に加えて空気抵抗も考慮してもよい。なお、空気抵抗は、車速の略3乗に比例して大きくなるので、車速が、例えば70km/h以上の場合には、運転の評価に大きな影響が生じる。
【0069】
また、上述の実施形態では、転がり抵抗を考慮したが、本発明はこれに限定されるものではなく、車両の走行に伴って発生する損失を考慮せずにパラメータΔEを決定してもよい。
【0070】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0071】
1…省燃費評価システム、3…車載機本体、3A…制御部、
3B…カードスロット部、5…スピーカ、7…表示装置、9…Gセンサ、
11…車速センサ。
【特許請求の範囲】
【請求項1】
省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システムであって、
駆動源が車両を走行させるための駆動力を発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段と、
運転を評価するための評価用パラメータが記憶されている記憶手段と、
前記評価用パラメータと前記パラメータとを比較して評価を決定する評価決定手段と
を備えることを特徴とする省燃費運転評価システム。
【請求項2】
前記パラメータは、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に、車両の走行に伴って発生する損失の変化率を加算した値に応じて変化する値であることを特徴とする請求項1に記載の省燃費運転評価システム。
【請求項3】
前記車両の走行に伴って発生する損失には、少なくとも走行用タイヤにて発生する転がり抵抗が含まれることを特徴とする請求項2に記載の省燃費運転評価システム。
【請求項4】
コンピュータを省燃費運転に適した減速運転であるか否かを評価するための省燃費運転評価システムとして作動させるためのプログラムであって、
車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段、
運転を評価するための評価用パラメータが記憶されている記憶手段、並びに
前記評価用パラメータと前記パラメータとを比較して評価を決定する評価決定手段
として機能させることを特徴とする省燃費運転評価システム用プログラム。
【請求項1】
省燃費運転に適した運転であるか否かを評価するための省燃費運転評価システムであって、
駆動源が車両を走行させるための駆動力を発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段と、
運転を評価するための評価用パラメータが記憶されている記憶手段と、
前記評価用パラメータと前記パラメータとを比較して評価を決定する評価決定手段と
を備えることを特徴とする省燃費運転評価システム。
【請求項2】
前記パラメータは、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に、車両の走行に伴って発生する損失の変化率を加算した値に応じて変化する値であることを特徴とする請求項1に記載の省燃費運転評価システム。
【請求項3】
前記車両の走行に伴って発生する損失には、少なくとも走行用タイヤにて発生する転がり抵抗が含まれることを特徴とする請求項2に記載の省燃費運転評価システム。
【請求項4】
コンピュータを省燃費運転に適した減速運転であるか否かを評価するための省燃費運転評価システムとして作動させるためのプログラムであって、
車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータを検出するパラメータ検出手段、
運転を評価するための評価用パラメータが記憶されている記憶手段、並びに
前記評価用パラメータと前記パラメータとを比較して評価を決定する評価決定手段
として機能させることを特徴とする省燃費運転評価システム用プログラム。
【図4】



【図6】
【図7】

【図8】

【図9】

【図10】

【図11】

【図12】
【図13】
【図14】

【図1】
【図2】

【図3】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図1】
【図2】
【図3】
【図5】
【公開番号】特開2013−40575(P2013−40575A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−176842(P2011−176842)
【出願日】平成23年8月12日(2011.8.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月12日(2011.8.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]