
真正性の検証
物品識別方法は、物品からのシグネチャを前記物品の本質的特性に基づいて特定するステップと、前記特定されたシグネチャを格納されたシグネチャと比較するステップとを含む。また、前記方法は、特定されたシグネチャを隣接するデータブロックに分割するステップと、各ブロックと格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するステップと、各ブロック比較からの比較結果の属性をそのブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するステップとを含む。また、前記方法は、特定されたシグネチャと格納されたシグネチャとの間の類似性結果を、補償値を使用して、特定されたシグネチャを調整して、判定するステップも含む。このため、延伸または収縮による損傷を受けた物品が、識別されることに成功する。また、識別精度を落とすことなしに、非線形のシグネチャ特定に対応がなされる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、真正性の検証に関し、詳細には、ただし、排他的にではなく、とりわけ、ID(個人識別)カード、販売可能な製品、重要な文書、またはその他のアイテムなどの、物品の真正性の検証に関する。
【背景技術】
【0002】
多くの従来の認証セキュリティシステムは、製造業者以外は誰であれ、実行するのが困難であるプロセスに依拠し、その困難は、資本設備の費用、技術的ノウハウの複雑さ、またはその両方によって課せられることが可能である。例は、銀行券における透かし、およびクレジットカード上、またはパスポート上のホログラムの備えである。残念ながら、犯罪者は、ますます巧妙になっており、元の製造業者が行うことができることは、実質的に何でも再現することができる。
【0003】
このため、各セキュリティトークンが、一意であること、ならびに、より重要なことには、測定可能であり、そのため、後の検証のための基礎として使用されることが可能な一意の特性を有することをもたらす、自然法則によって支配される何らかのプロセスを使用して、トークンを作成することに依拠する認証セキュリティシステムの知られているアプローチが、存在する。このアプローチによれば、トークンは、決められた仕方で製造され、測定されて、一意の特性が得られる。次に、その特性が、コンピュータデータベースの中に格納される、または、それ以外で、保持されることが可能である。このタイプのトークンは、担体物品、例えば、銀行券、パスポート、IDカード、重要な文書に埋め込まれることが可能である。その後、担体物品が、再び測定されることが可能であり、測定された特性が、データベースの中に格納された特性と比較されて、合致が存在するかどうかが確かめられることが可能である。
【0004】
セキュリティトークンは、情報にアクセスするのに、トランザクションを許可するのに、または他の多くの目的で使用されることが可能である。しかし、損傷したトークン、および不完全なトークン識別装置は、トークンが可能にすべき活動を実行する際の困難につながる可能性がある。
【0005】
本発明は、少なくとも部分的に、従来のシステムの問題および欠点を考慮されて作成された。
【0006】
本発明は、少なくとも部分的に、一意性が、トークンの磁気応答に影響を与える磁気材料の再現不能な欠陥によって提供される、磁気材料で作られたトークンを使用する認証技術を適用することに関する本発明人の研究からもたらされた(Cowburn、PCT/GB03/03917で詳細に説明される)。この研究の一環として、磁気材料が、バーコードフォーマットで、すなわち、いくつかの平行なストリップとして作られた。磁気リーダで磁界を掃引することによって、それらのストリップの一意の磁気応答を読み取ることとともに、バーコード上をレーザ光線で走査し、バーコードストリップ、ならびに、それらのストリップが表面に形成されている物品の様々な反射率を使用することにより、バーコードを読み取る光学スキャナが、組み込まれた。この情報は、バーコードが、例えば、銀行券に関してやはり前述したとおり(例えば、Kravolec、「Plastic tag makes foolproof ID」、Technology research news、2002年10月2日参照)、あるタイプのよく知られた自己認証スキームにおける一意の磁気応答のデジタルシグネチャを符号化するのに使用されたので、磁気特性に対して補足的であった。
【0007】
本発明人が驚いたことには、この光学スキャナを使用していた際、磁気チップが支持されていた紙の背景材料が、スキャナに一意の光応答を与えることが発見された。さらなる調査の後、様々なタイプのボール紙やプラスチックの表面などの、他の多くの未加工の表面が、同一の効果を示すことが確かめられた。さらに、この一意の特性が、少なくともある程度、スペックルから生じるが、非スペックルの寄与も含むことが、本発明人によって確かめられた。
【0008】
このように、特別に加工されたトークンを使用する必要なしに、または他の何らかの仕方で物品を特別に加工する必要なしに、スペックルベースの技術のすべての利点を得ることが可能であることが、見出されている。特に、多くのタイプの紙、ボール紙、およびプラスチックが、コヒーレントな光線から一意特性の散乱信号を与え、したがって、一意のデジタルシグネチャを、ほとんどあらゆる紙の文書、またはボール紙の梱包アイテムから得ることができることが、見出されている。
【0009】
セキュリティデバイスのために使用される前述の知られているスペックルリーダは、トークンの全体にレーザ光線を当て、もたらされるスペックルパターンの有意な立体角部分を、CCDを使用してイメージングして(例えば、英国特許第2 221 870号および米国特許第6584214号を参照)、多くの様々なデータポイントで構成されるトークンのスペックルパターンイメージを得ることに基づくように思われる。
【0010】
本発明人によって使用されるリーダは、このようには動作しない。リーダは、散乱されたレーザ光線から4つだけの信号成分を収集するように、角度が離隔された4つの単一チャネル検出器(4つの単純なフォトトランジスタ)を使用する。レーザ光線は、表面の非常に小さい部分のみにわたるスポットに集束させられる。そのスポットが表面上を走査させられるにつれ、信号が、表面上の様々な局所的な領域から、4つの単一チャネル検出器によって収集される。このため、物品からの特性応答は、物品表面上の多数(通常、数百または数千)の様々な局所的な領域からの独立した測定値で構成される。4つのフォトトランジスタが、使用されるものの、それらのフォトトランジスタの単独の1つからのデータだけを使用する解析は、一意の特性応答を、この単一のチャネルだけからも引き出すことができることを示す。しかし、それら4つのチャネルのさらなるチャネルが、応答に含められる場合、より高いセキュリティレベルが、得られる。
【特許文献1】国際公開第GB03/03917号パンフレット
【特許文献2】英国特許第2 221 870号明細書
【特許文献3】米国特許第6584214号号明細書
【非特許文献1】Kravolec、「Plastic tag makes foolproof ID」、Technology research news、2002年10月2日
【発明の開示】
【課題を解決するための手段】
【0011】
第1の態様から見ると、本発明は、物品識別方法を提供する。前記方法は、物品からのシグネチャを、その物品の本質的特性に基づいて特定するステップと、その特定されたシグネチャを、格納されたシグネチャと比較するステップとを含むことが可能である。また、前記方法は、特定されたシグネチャを、隣接するデータブロックに分割するステップと、各ブロックと格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するステップとを含むことが可能である。このため、物品を検証する際に、より高いレベルの細分性が、実現されることが可能である。
【0012】
一部の実施形態では、前記方法は、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するステップも含むことが可能である。また、前記方法は、前記特定されたシグネチャを調整するように前記補償値を使用して、特定されたシグネチャと格納されたシグネチャとの間の類似性結果を判定するステップも含むことが可能である。このため、延伸または収縮による損傷を受けた物品が、識別されることに成功することが可能である。また、識別精度を落とすことなしに、非線形のシグネチャ特定に対応がなされることも可能である。このため、シグネチャ生成ステップ中の様々な物理的位置合わせ偏差が補償されて、正しい比較結果が達せられることが可能にされる。
【0013】
一部の実施形態では、シグネチャを特定するステップは、価値権利トークンをコヒーレントな放射にさらすステップと、価値権利トークンの本質的構造からのコヒーレントな放射の散乱を測定するデータポイントセットを収集するステップと、そのデータポイントセットから価値権利トークンのシグネチャを特定するステップとを含む。このため、本質的特性は、物品が作られている材料の表面パターンであることが可能である。
【0014】
一部の実施形態では、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較するステップは、特定されたシグネチャのブロックと格納されたシグネチャの対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための補償値を算出するステップを含む。このため、予期される結果を使用して、走査中の物品の物理的位置合わせ偏差が取り除かれることが可能である。
【0015】
一部の実施形態では、補償値を算出するステップは、ブロック比較のそれぞれに関する相互相関ピークロケーションに対する最良適合の関数を推定するステップを含み、最良適合の関数は、予期される相互相関ピークロケーションからの平均偏差を表す。このため、予期される位置からの平均偏差が、補償のために使用されることが可能である。この平均偏差は、多くの仕方で測定されることが可能であり、直線関数、指数関数、三角関数、およびx2関数を含むことが可能な、様々な関数の1つである最良適合の関数をもたらすことが可能である。
【0016】
一部の実施形態では、前記方法は、特定されたシグネチャを複数の格納されたシグネチャと比較するステップをさらに含む。特定されたシグネチャとそれら複数の格納されたシグネチャとの間の最も近い合致結果が、見出されることが可能である。また、特定されたシグネチャが、格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定した場合、合致なしの結果が、見出されることも可能である。このため、アイテムは、アイテムシグネチャのデータベースと比較されて、そのアイテムが、そのデータベースのメンバであるかどうかが判定されることが可能である。これを使用して、製品、価値移転トークン、価値移転許可トークン、権利トークン、およびアクセストークンなどの、様々な物品の真正性が判定されることが可能である。
【0017】
一部の実施形態では、前記方法は、比較される各ブロックに関する類似性結果を計算することも含むことが可能である。一部の実施形態では、前記方法は、少なくとも1つの所定のブロックに関する類似性結果を、所定の類似性閾値と比較し、その少なくとも1つの所定のブロックに関する類似性結果が、所定の類似性閾値を下回っていた場合、それらのシグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すことも含むことが可能である。このため、物品のクリティカルな部分が、識別されることが可能であり、そのクリティカルな部分、およびシグネチャ全体に関して、明確な合致が、物品の真正性検証のために要求されることが可能である。
【0018】
第2の態様から見ると、本発明は、物品を識別するためのシステムを提供する。前記システムは、物品からのシグネチャを、その物品の本質的特性に基づいて特定するように動作可能なシグネチャ特定ユニットと、特定されたシグネチャを格納されたシグネチャと比較するように動作可能な比較ユニットとを含むことが可能である。前記比較ユニットは、特定されたシグネチャを、隣接するデータブロックに分割し、各ブロックと、格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するように動作可能である。このため、物品の高い細分性の解析が、実行されることが可能である。
【0019】
一部の実施形態では、前記比較ユニットは、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するようにさらに動作可能である。前記比較ユニットは、特定されたシグネチャを調整するように補償値を使用して、特定されたシグネチャと格納されたシグネチャとの間の類似性結果を、判定するようにさらに動作可能である。このため、延伸または収縮による損傷を受けた物品が、識別されることに成功することが可能である。また、識別精度を落とすことなしに、非線形のシグネチャ特定に対応がなされることも可能である。このため、シグネチャ生成ステップ中の様々な物理的位置合わせ偏差が補償されて、正しい比較結果が達せられることが可能にされる。
【0020】
一部の実施形態では、前記比較ユニットは、比較される各ブロックに関して類似性結果を計算するように動作可能である。また、前記比較ユニットは、少なくとも1つの所定のブロックに関する類似性結果を、所定の類似性閾値と比較し、その少なくとも1つの所定のブロックに関する類似性結果が、所定の類似性閾値を下回っていた場合、それらのシグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すようにも動作可能である。このため、物品のクリティカルな部分が、識別されて、物品の他の領域と比べて、より高いレベルの精査を受けることが可能である。
【0021】
一部の実施形態では、物品の本来的な特性に関して収集されるデータの異なるデータが、物品に対するコヒーレント光線の動きを提供することにより、物品の異なる部分からの散乱と関係することが確実にされる。この動きは、固定されて保持される物品上で光線を動かすモータによってもたらされることが可能である。このモータは、サーボモータ、自走モータ、ステップモータ、または任意の適切なモータタイプであることが可能である。代替として、駆動は、低価格のリーダにおいて、手動であることも可能である。例えば、操作者は、物品がのせられたキャリッジを、静止した光線を横切るように動かすことにより、物品上を光線に走査させることもできる。コヒーレント光線による断面は、物品の投影よりも、通常、少なくとも1(好ましくは、少なくとも2)オーダ小さく、したがって、相当な数の独立したデータポイントが、収集されることが可能である。コヒーレント光線を物品において集束させる集束構成が、提供されることが可能である。集束構成は、コヒーレント光線を細長い焦点にもたらすように構成されてもよく、その場合、ドライブは、好ましくは、細長い焦点の長軸と交差する方向で、物品上でコヒーレント光線を動かすように構成される。細長い焦点は、好都合には、円柱レンズ、または均等のミラー構成を使用して提供されることが可能である。
【0022】
他の実施形態では、検出器構成が、物品のそれぞれの異なる部分からの散乱を感知するように配置され、構成された複数の検出器チャネルを含むという点で、データポイントの異なるデータポイントが、物品の異なる部分からの散乱と関係することが、確実にされることが可能である。これは、方向性検出器、光ファイバを使用した信号の局所的収集、またはその他の手段で達せられることが可能である。方向性検出器、または信号の他の局所的収集を使用すると、コヒーレント光線は、集束させられなくてもよい。実際、コヒーレント光線は、静止していて、サンプリングボリューム全体を照らすことも可能である。方向性検出器は、検出器要素に融合させられた、または検出器要素に対して、それ以外で固定された集束レンズによって実施されることが可能である。光ファイバが、マイクロレンズと併せて使用されてもよい。
【0023】
検出器構成が単一の検出器チャネルだけからなる場合に、実用的なリーダを作成することは、可能である。他の実施形態は、角度をなして配置され、読み取りボリュームのそれぞれの異なる部分に関するデータポイントグループを収集するように動作可能な検出器要素のグループ、好ましくは、いくつかの検出器要素の小さいグループを含む検出器構成を使用する。シグネチャが、同一のグループのデータポイント間の比較からの寄与を組み込む場合に、セキュリティ強化が提供される。この比較には、好都合には、相互相関がかかわることが可能である。
【0024】
1つだけの検出器チャネルを使用して、機能するリーダが作成されることが可能であるものの、好ましくは、少なくとも2つのチャネルが、存在する。これにより、検出器信号の間で相互相関が行われることが可能になり、そうすることは、シグネチャを特定することに関連する信号処理のために役立つ。2つから10までの検出器チャネルが、ほとんどのアプリケーションに適することものと想定され、2つから4つまでが、現在、装置の単純さとセキュリティとの間の最適なバランスと考えられている。
【0025】
検出器要素は、有利には、読み取りボリュームと交差する平面に位置するように配置され、ペアの各メンバは、コヒーレント光線の軸に対して、その平面において角度をなして配置され、好ましくは、1つまたは複数の検出器要素が、光線の軸のいずれの側にも存在する。しかし、非平面の検出器配置も、許容できる。
【0026】
異なる検出器から得られた信号の相互相関の使用は、セキュリティレベルを高めるため、さらに、時を経て、シグネチャをより確実に再現できることを可能にするためにも、貴重なデータを与えることが分かっている。スペックルパターンが本質的に互いに関係していない(パターンの対向するポイントからの信号を例外として)ので、相互相関の有用性は、科学的に見て、幾分、意外である。つまり、スペックルパターンに関して、励起ロケーションと交差する共通の平面において、異なる検出器が励起ロケーションに対して等しい大きさの角度をなして配置されているのでない限り、異なる検出器からの信号間の相互相関は、定義により、まったく存在しない。したがって、相互相関寄与を使用することの価値は、散乱信号のかなりの部分が、スペックルではないことを示す。非スペックルの寄与は、紙の繊維のよじれなどの、複雑な表面からの直接散乱、または散漫散乱の寄与の結果と見なされることが可能である。現在、スペックル散乱信号寄与と非スペックル散乱信号寄与の相対的重要度は、明らかではない。しかし、今日まで実行された実験から、検出器は、純粋なスペックルパターンを測定しているのではなく、スペックル成分と非スペックル成分の合成信号を測定していることが、明らかである。
【0027】
シグネチャに相互相関成分を組み込むことは、セキュリティを向上させるためにも有益である可能性がある。この理由は、高解像度の印刷を使用して、真性の物品の表面にわたるコントラスト変化を再現する物品を作成することが可能だとしても、真性の物品を走査することによって得られる相互相関係数と合致させることはできないからである。
【0028】
一実施形態では、検出器チャネルは、単純なフォトトランジスタの形態における個々の検出器構成要素で構成される。PINダイオードまたはフォトダイオードなどの、他の単純な個々の構成要素が、使用されることも可能である。また、検出器アレイなどの集積された検出器構成要素が、使用されることも可能であるが、そうすることは、デバイスの費用および複雑さを増大させる。
【0029】
また、走査されるべき物品に当たるレーザ光線の照射角度を変更する初期の実験から、実際には、物品が、測定の合間に劣化した場合でさえ、ほとんど変化なしに、同一の表面から繰り返し測定されることが可能な特性を得るために、レーザ光線が、走査される表面にほぼ垂直に入射することが好ましいように思われる。少なくとも一部の知られているリーダは、斜め入射を使用する(英国特許第2 221 870号を参照)。ひとたび理解されると、この効果は、明白であるように思われるが、この効果は、英国特許第2 221 870号のスペックルリーダ、および、実のところ、本発明人によって構築された最初の試作品のリーダを含め、一部の先行技術のスペックルリーダの設計によって証明されるとおり、明らかに、直ちに明白ではない。斜め入射を有する、本発明人の最初の試作品のリーダは、実験室条件において、それなりにうまく機能したが、物品として使用された紙の劣化に極めて影響されやすかった。例えば、その紙を指でこすることで、再測定時に相当な違いが現れるようにするのに十分だった。第2試作品のリーダは、垂直入射を使用し、定常的な扱いによる紙の劣化に対して、さらに、レーザプリンタを含め、様々なタイプのプリンタの中を通ること、写真複写機の中を通ること、書くこと、印刷すること、オーブンの中で意図的に焦がすこと、およびくしゃくしゃにして、再び平らにすることなどの、より深刻な事象に対しても、堅牢であることが分かっている。
【0030】
したがって、コヒーレント光線が、物品に、ほぼ垂直な入射で当たるように、読み取りボリューム上にコヒーレント光線を向けるよう、ソースを装着することが、有利である可能性がある。ほぼ垂直な入射とは、±5度、±10度、または±20度という意味である。代替として、光線は、物品に対して斜め入射を有するように向けられることが可能である。そうすることは、前記光線が、物品上で走査させられる場合、通常、悪影響を有する。
【0031】
また、詳細な説明において説明されるリーダにおいて、検出器構成は、読み取りボリュームから後方散乱される放射を検出するように反射配置されることにも留意されたい。しかし、物品が、透明である場合、検出器は、透過配置されることが可能である。
【0032】
シグネチャジェネレータは、あらかじめ記録されたシグネチャのデータベースにアクセスし、データベースが、読み取りボリュームの中に置かれた物品のシグネチャに対する合致を含むかどうかを確かめる比較を実行するように動作可能である。データベースは、リーダ装置の一部をなす大容量ストレージデバイスの一部であっても、遠隔ロケーションにあって、遠隔通信リンクを介してリーダによってアクセスされてもよい。遠隔通信リンクは、無線リンクおよび固定リンクを含め、任意の従来の形態をとることが可能であり、さらに、インターネットを介して利用可能であってもよい。データ獲得―処理モジュールは、少なくとも一部の動作モードにおいて、合致がまったく見出されない場合、シグネチャがデータベースに追加されることを可能にするように動作可能である。
【0033】
データベースを使用する際、シグネチャを格納することに加えて、データベースの中の、前記シグネチャを、文書の走査されたコピー、パスポート保持者の写真、製品の製造の場所および時刻に関する詳細、または販売可能な商品の意図される販売目的地に関する詳細(例えば、灰色の輸入を追跡するために)などの、物品についての他の情報に関連付けることも有用である可能性がある。
【0034】
本発明は、紙、ボール紙、およびプラスチックなどの、様々な異なる種類の材料で作られた物品の識別を可能にする。
【0035】
本来的な構造で意味するのは、前記物品が、前記物品の製造によって有する構造であり、物品に組み込まれたトークンまたは人工繊維によって与えられる構造などの、セキュリティ目的で特別に提供される構造とは区別される。
【0036】
紙またはボール紙で意味するのは、木材パルプまたは均等の繊維加工でできている任意の物品である。紙またはボール紙は、コーティングを施されること、またはセロハンなどの、透明な材料を含浸させられること、またはそのような材料で覆われることが可能である。表面の長期の安定が、特に懸念される場合、紙は、例えば、アクリル樹脂吹き付けの透明コーティングを施されてもよい。
【0037】
このため、データポイントは、コヒーレント光線によって照らされる位置に応じて収集されることが可能である。これは、物品上に局所的なコヒーレント光線を走査させること、または方向性検出器を使用して、物品の様々な部分からの散乱光を収集すること、またはその両方の組合せによって達せられることが可能である。
【0038】
シグネチャは、ほとんどのアプリケーションにおいてデジタルシグネチャであるものと想定される。現行の技術を使用したデジタルシグネチャの通常のサイズは、200ビットから8キロビットまでの範囲内にあり、ただし、現行では、高いセキュリティのために約2キロビットのデジタルシグネチャサイズを有することが好ましい。
【0039】
本発明のさらなる実施形態は、デジタルシグネチャをデータベースの中に格納するのではなく、権利トークンに、シグネチャから導き出されたラベルを付けることによって実行される。ただし、ラベルは、マシン可読符号化プロトコルに準拠する。
【0040】
次に、本発明の特定の実施形態を、単に例として、添付の図面を参照して説明する。
【発明を実施するための最良の形態】
【0041】
本発明は、様々な変形形態および代替の形態が可能であるが、特定の実施形態を、例として、図面に示し、本明細書で詳細に説明する。しかし、図面、および図面の詳細な説明は、本発明を、開示される特定の形態に限定することを意図するものではなく、それどころか、本発明は、添付の特許請求の範囲によって規定される本発明の範囲に含まれるすべての変形形態、均等形態、および代替形態に及ぶものとされることを理解されたい。
【0042】
電子商取引環境などの環境においてセキュリティサービスおよび許可サービスを提供するため、物理的アイテムを一意に識別するためのシステムが、詐欺の可能性を低減し、プロバイダとエンドユーザの両方のために、電子商取引システムの実際の信頼性と感じられる信頼性の両方を高めるのに使用されることが可能である。
【0043】
次に、そのようなアイテム識別を実行するのに適したシステムの実施例を、図1ないし図11を参照して説明する。
【0044】
図1は、リーダ装置1の第1実施例の概略側面図を示す。光学リーダ装置1は、装置の読み取りボリューム内に配置された物品(図示せず)からシグネチャを測定することを目的とする。読み取りボリュームは、筐体12におけるスリットである読み取りアパーチャ10によって形成される。筐体12は、装置の主な光学構成要素を含む。スリットは、x方向でより大きい長さを有する(図面における挿入軸を参照)。主要な光学構成要素は、コヒーレントレーザ光線15を生成するためのレーザソース14、および、16a、16b、16c、および16dというラベルが付けられた、この実施例では、k=4である、複数のk個の光検出器要素からなる検出器構成16である。レーザ光線15は、y方向(図面の平面に垂直な)に広がり、読み取りアパーチャの平面に位置する細長い焦点に、円柱レンズ18によって集束させられる。1つの例示的なリーダにおいて、細長い焦点は、約2mmの長軸寸法と、約40マイクロメートルの短軸寸法とを有する。これらの光学構成要素は、サブアセンブリ20内に含まれる。この実施例では、4つの検出器要素16a〜16dは、光線軸に対して様々な角度をなして交互配置で光線軸のいずれの側にも配置されて、読み取りボリューム内に存在する物品から反射散乱させられた光を収集する。この実施例では、オフセット角は、-70度、-20度、+30度、および+50度である。光線軸のいずれの側でも、これらの角度は、光学構成要素が収集するデータポイントが、可能な限り独立であるように、等しくならないように選択される。4つすべての検出器要素は、共通の平面に配置される。光検出器要素16a〜16dは、コヒーレントな光線が、読み取りボリュームから散乱される際に、筐体上に置かれている物品から散乱された光を検出する。図示されるとおり、源は、レーザ光線15の光線軸が、z方向にあり、したがって、レーザ光線16が、垂直入射で読み取りアパーチャ内の物品に当たるように、レーザ光線15を向けるように取り付けられる。
【0045】
一般に、焦点深度は、z方向における物品位置付けの違いが、読み取りアパーチャの平面における光線のサイズの大きな変化をもたらさないように、大きいことが望ましい。この実施例では、焦点深度は、スキャナに対する物品の位置が、ある程度、制御されることが可能な、良好な結果をもたらすのに十分なだけ大きい、約0.5mmである。焦点深度、開口数、および作動距離というパラメータは、互いに依存し、スポットサイズと焦点深度との間の、よく知られたトレードオフをもたらす。
【0046】
駆動モータ22が、矢印26で示されるとおり、適切なベアリング24、またはその他の手段を介して、光学サブアセンブリ20の直線の動きをもたらすために、筐体12内に配置される。このため、駆動モータ22は、読み取りアパーチャ10にわたるx軸方向でコヒーレント光線を直線的に動かす役割をして、光線15が、細長い焦点の長軸と交差する方向で走査させられるようにする。コヒーレント光線15は、光線15の焦点において、前記コヒーレント光線と垂直な平面、すなわち、読み取りアパーチャが設けられている筐体の壁の平面における読み取りボリュームの投影よりはるかに小さい、xz平面(図面の平面)における断面を有するようなサイズにされるので、駆動モータ22の走査は、コヒーレント光線15に、駆動モータ22の作用の下で、読み取りボリュームの多数の異なる部分をサンプリングさせる。
【0047】
図2は、このサンプリングを例示するように含められ、読み取り領域が、その領域にわたって細長い光線を走査させることにより、どのようにn回、サンプリングされるかを示す概略透視図である。集束させられたレーザ光線が、駆動の作用の下で、読み取りアパーチャに沿って走査させられるにつれての、レーザ光線のサンプリング位置が、長さ「l」、幅「w」の領域をサンプリングする、1からnまで番号が付けられた隣接する長方形によって表される。データ収集は、ドライブが、スリットに沿って走査させられるにつれ、n個の位置の各位置において信号を収集するように行われる。したがって、読み取りボリュームの、図示されるn個の異なる部分からの散乱と関係するk×n個のデータポイントのシーケンスが、収集される。
【0048】
概略で示されるのもまた、x方向、すなわち、走査方向に沿って、スリット10に隣接して、筐体12の下面に形成されたオプションの距離マーク28である。x方向における、これらのマーク間の例示的な間隔は、300マイクロメートルである。これらのマークは、細長い焦点の末端によってサンプリングされ、後段でさらに詳細に説明するとおり、x方向におけるデータの線形化を、そのような線形化が要求される場合に、提供する。測定は、スリットに隣接したマーク28の領域から光を収集するように構成された方向性検出器である、さらなるフォトトランジスタ19によって実行される。
【0049】
代替の実施例において、マーク28は、光学サブアセンブリ20の一部である専用の符号器エミッタ/検出器モジュール19によって読み取られることが可能である。符号器エミッタ/検出器モジュールは、バーコードリーダにおいて使用される。一実施例では、集束LED(発光ダイオード)および光検出器に基づくAgilent HEDS-1500モジュールが、使用されることが可能である。モジュール信号は、追加の検出器チャネルとしてPIC ADCに送り込まれる(後段の図3の説明を参照)。
【0050】
40マイクロメートルという焦点の例示的な小さい方のサイズ、および2cmというx方向における走査長で、n=500であり、k=4で2000のデータポイントが与えられる。k×nに関する値の通常の範囲は、所望されるセキュリティレベル、物品タイプ、検出器チャネルの数「k」、およびその他の要因に依存して、100<k×n<10000であるものと見込まれる。また、検出器kの数を増やすことにより、扱い、印刷などを介した物品の表面劣化に対する、測定値の影響されにくさを向上させることも分かっている。実際、今日まで使用された試作品で、経験則は、多種多様な表面に関して、まずまず高いセキュリティレベルをもたらすのに、独立したデータポイントの合計数、すなわち、k×nが、500以上でなければならないことである。スキャナが、1つの特定の表面タイプ、または1つの表面タイプグループだけに対して使用されることが意図される場合、他の最小値(より高い、またはより低い)が、適用されることも可能である。
【0051】
図3は、リーダ装置の機能構成要素の概略ブロック図である。モータ22が、電気的リンク23を介してPIC(プログラマブル割り込みコントローラ)30に接続される。検出器モジュール16の検出器16a〜16dが、それぞれの電気接続線17a〜17dを介して、PIC30の一部であるADC(アナログ―デジタル変換器)に接続される。同様の電気接続線21が、マーカ読み取り検出器19をPIC30に接続する。光リンクまたは無線リンクが、電気的リンクの代わりに、または電気的リンクと組合せで使用されてもよいことを理解されたい。PIC30は、データ接続32を介してPC(パーソナルコンピュータ)34とインターフェースをとる。PC34は、デスクトップであっても、ラップトップであってもよい。PCの代替として、他のインテリジェントデバイス、例えば、PDA(パーソナルデジタルアシスタント)または専用の電子ユニットが使用されてもよい。PIC30とPC34は、検出器16a〜16dによって収集されたデータポイントセットから、物品のシグネチャを特定するためのデータ獲得―処理モジュール36を共同で形成する。
【0052】
一部の実施例において、PC34は、インターフェース接続38を介して、dB(データベース)40へのアクセスを有することが可能である。データベース40は、PC34上でメモリの中に存在しても、PC34のドライブ上に格納されてもよい。代替として、データベース40は、PC34から遠隔であり、例えば、移動電話サービス、またはインターネットと組合せで無線LAN(ローカルエリアネットワーク)を使用して、無線通信によってアクセスされてもよい。さらに、データベース40は、PC34上にローカルで格納されるが、遠隔のソースから定期的にダウンロードされてもよい。データベースは、遠隔のエンティティによって管理されてもよく、このエンティティは、全体的なデータベースの一部分に限ってのアクセスを特定のPC34に与えてもよく、かつ/またはセキュリティポリシーに基づいて、データベースへのアクセスを制限してもよい。
【0053】
データベース40は、あらかじめ記録されたシグネチャのライブラリを含むことが可能である。PC34は、使用中、データベース40にアクセスして、データベース40が、読み取りボリューム内に置かれた物品のシグネチャとの合致を含むかどうかを確かめる比較を実行することができるように、プログラミングされることが可能である。また、PC34は、合致がまったく見出されない場合、シグネチャがデータベースに追加されることを可能にするようにプログラミングされることも可能である。
【0054】
PCとデータベースの間のデータフローの扱われ方は、PCのロケーション、ならびにPCの操作者と、データベースの操作者との間の関係に依存することが可能である。例えば、PCおよびリーダが、物品の真正性を確認するのに使用されている場合、PCは、新たな物品をデータベースに追加することができなくてもよく、実際、データベースに直接にアクセスせず、代わりに、比較のためにシグネチャをデータベースに供給してもよい。この構成では、データベースは、物品が真性であるかどうかを示す真正性結果をPCに提供することができる。他方、PCおよびリーダが、データベース内のアイテムを記録する、または検証するのに使用されている場合、データベースの中に格納するように、シグネチャが、データベースに提供されることが可能であり、比較は、まったく必要とされない可能性がある。しかし、この状況において、比較が実行されて、単一のアイテムが、データベースに2回、入力されるのを回避することも可能である。
【0055】
図4は、リーダ装置1の透視図であり、リーダ装置の外形を示す。筐体12、およびスリット形状の読み取りアパーチャ10が、見て取れる。また、物理的ロケーション補助42もはっきり見え、所与の形状の物品を、読み取りアパーチャ10に対するある固定位置に位置付けるために提供される。この実施例では、物理的ロケーション補助42は、文書または梱包ボックスの隅が位置付けられることが可能な直角ブラケットの形状である。補助42は、物品が、走査される必要がある場合にはいつでも、物品の同一の部分が、読み取りアパーチャ10内に位置付けられることが可能であることを確実にする。単純な角ブラケット、または均等物で、紙、パスポート、IDカード、および梱包ボックスなどの、明確な隅を有する物品には、十分である。他の形状の位置ガイドが、提供されて、CDおよびDVDを含む円形のアイテム、または円筒形の梱包容器などの、曲面を有するアイテムなどの、様々な形状のアイテムを受け入れることも可能である。1つのサイズおよび形状だけのアイテムが、走査されるべき場合、前記アイテムを受けるスロットが、設けられることが可能である。
【0056】
このように、以上、物品真正性の遠隔検証のためにセキュリティ機構において使用するのに適した走査―シグネチャ生成装置の実施例を説明してきた。そのようなシステムが、展開されて、ある物品が、複数のロケーションにおいて走査されることを可能にし、前記物品が、両方の事例において同一の物品であることを確実にするチェックが実行されることを可能にし、オプションとして、前記物品が、最初の走査と後の走査の間に不正操作されていないことを確実にするチェックが実行されることを可能にすることが可能である。
【0057】
図5は、物品位置付けが一貫していることを確実にする文書フィーダが提供される、リーダのための代替の物理的構成の実施例を示す。この実施例では、物品供給トレー61を取り付けた筐体60が、提供される。トレー61は、リーダによる走査のために1つまたは複数の物品62を保持することができる。前述したとおり、モータが供給ローラ64を駆動して、デバイスの中を通り、光学サブアセンブリ20の走査アパーチャの横断するように物品62を運ぶことができる。このため、物品62は、光学サブアセンブリと物品との間の相対的な動きが物品の動きによってもたられるような仕方で、前述したように光学サブアセンブリ20によって走査されることが可能である。そのようなシステムを使用して、走査されるアイテムの動きは、十分な線形性を有するモータを使用して制御されることが可能であり、したがって、距離マークおよび線形化処理の使用は、不必要である可能性がある。装置は、文書スキャナ、写真複写機、または文書管理システムのための任意の従来のフォーマットに従うことが可能である。そのようなスキャナは、単独シートを扱うことともに、またはそうする代わりに、ラインフィードシート(例えば、ミシン目の継ぎ目で複数のシートが一緒につなげられている)を扱うように構成されてもよい。
【0058】
このように、以上、自動化されたフィーダタイプのデバイスにおいて物品を走査するのに適した装置を説明してきた。供給構成の物理的構成に依存して、スキャナは、材料の1つまたは複数の単独シート、つながったシートもしくは材料、あるいは梱包ボール箱などの3次元アイテムを走査することができることが可能である。
【0059】
図6は、リーダに関するさらなる代替の物理的構成の実施例を示す。この実施例では、物品は、ユーザによってリーダを通るように動かされる。図6Aに示されるとおり、リーダ筐体70が、走査のために物品を挿入するためのスロット71を備えることが可能である。光学サブアセンブリ20が、前記スロットを通過させられる物品62を走査することができるように、スロット71内に向けられた走査アパーチャを備えることが可能である。さらに、ガイド要素72が、スロット71内に備えられて、光学サブアセンブリ20から正しい焦点距離に物品を導くのを助け、かつ/またはスロットの中を物品が一定の速度で通過することをもたらすことが可能である。
【0060】
図6Bに示されるとおり、リーダは、矢印によって示されるとおり、物品が、筐体70の中を長軸方向のスロットに沿って動かされる際に、物品を走査するように構成されることが可能である。代替として、図6Cに示されるとおり、リーダは、矢印によって示されるとおり、物品が、リーダ筐体70内に入り込むスロットの中に挿入される、またはそこから出される際に、物品を走査するように構成されてもよい。このタイプのスキャナは、カード、プラスチックシート、または金属シートなどの、少なくとも部分的に剛性である物品を走査するのに特に適していることが可能である。そのようなシートは、例えば、クレジットカード、または他の銀行カードなどのプラスチックアイテムであることが可能である。
【0061】
このように、以上、物品の手動で開始される走査のための構成を説明してきた。この構成は、銀行カードおよび/またはクレジットカードを走査するために使用されることが可能である。そのため、カードが、前記カードが、使用のために提示される端末装置において走査されることが可能であり、前記カードから取り込まれたシグネチャが、前記カードに関する格納されたシグネチャと比較されて、前記カードの真正性、および不正操作されていない性質が、確認されることが可能である。また、そのようなデバイスは、例えば、軍隊スタイルの金属IDタグ(これらのタグは、アレルギー患者によって、患者のアレルギーについて他の人々に知らせるために、多くの場合、携帯される)を読み取るコンテキストにおいて使用されることも可能である。これにより、患者を治療する医療スタッフが、治療されている患者が、実際に、タグの正しい所持者であることを確実にすることが可能になる。同様に、犠牲者状況において、回収されたタグが、真正性に関して走査されて、家族および/または同僚に知らせる前に、犠牲者が正しく身元確認されていることが確実にされることが可能である。
【0062】
前述の実施例は、小さい断面のコヒーレント光線を使用した局所的励起を、励起の局所領域を含むはるかに大きい領域にわたって散乱する光信号を受け入れる検出器と組み合わせることに基づく。はるかに大きい領域の励起との組合せで、局所的領域からだけの光を収集する方向性検出器に代わりに基づく、機能的に均等の光学系を設計することも可能である。
【0063】
図7Aは、方向性光収集と、コヒーレント光線を使用した全面的照明とに基づくリーダのための、そのようなイメージング構成を概略で示す側面図である。アレイ検出器48が、円柱マイクロレンズアレイ46と組合せで配置され、したがって、検出器アレイ48の隣接するストリップは、読み取りボリュームにおける、対応する隣接するストリップからの光だけを収集する。図2を参照すると、各円柱マイクロレンズが、n個のサンプリングストリップの1つから光信号を収集するように配置される。すると、コヒーレント照明は、読み取りボリューム(図示せず)全体の全面的な照明で行われることが可能である。
【0064】
また、局所的励起と局所的検出の組合せを有する混成システムも、一部のケースにおいて有用である可能性がある。
【0065】
図7Bは、方向性検出器が、細長い光線を使用した局所的照明と組合せで使用されるリーダに関する、そのような混成イメージング構成の光学フットプリントを概略で示す平面図である。この実施例は、方向性検出器が提供される図1の実施例の発展形態と考えることができる。この実施例では、方向性検出器の3つのバンクが、提供され、各バンクは、「l×w」励起ストリップに沿った異なる部分からの光を収集することを目標にする。読み取りボリュームの平面からの収集領域が、点線の円で示されており、したがって、第1検出器バンク、例えば、2は、励起ストリップの上側部分からの光信号を収集し、第2検出器バンクは、励起ストリップの中央部分からの光を収集し、第3検出器バンクは、励起ストリップの下側部分からの光信号を収集する。各検出器バンクは、約l/mの直径の円形収集領域を有するように示される。ただし、mは、励起ストリップの下位区分の数であり、この実施例において、m=3である。このようにして、独立したデータポイントの数が、所与の走査長lに関して、m倍に増加されることが可能である。後段でさらに説明するとおり、異なる方向性検出器バンクの1つまたは複数が、スペックルパターンをサンプリングする光信号を収集すること以外の目的で使用されることが可能である。例えば、バンクの1つを使用して、バーコード走査のために最適化された仕方で光信号が収集されてもよい。これが該当する場合、コントラストだけに関して走査している際、相互相関を得ることに利点はまったく存在しないので、前記バンクは、1つだけの検出器を含むことで、一般に、十分である。
【0066】
以上、様々なリーダ装置の主要な構造的構成要素、および機能的構成要素を説明したので、次に、シグネチャを特定するのに使用される数値処理について説明する。この数値処理は、大部分、PIC30に従属させられた、いくつかの要素を有するPC34上で実行されるコンピュータプログラムにおいて実施されることが可能であることが理解されよう。代替の実施例では、数値処理は、ハードウェアまたはファームウェアの専用の数値処理デバイスまたは数値処理デバイス群によって実行されることが可能である。
【0067】
図8Aは、約0.5×0.2mmの領域に及ぶイメージを有する紙表面の顕微鏡イメージである。この図は、紙などからの、巨視的に平坦な表面が、微視的なスケールにおいて、多くの場合に、非常に構造化されていることを例示するために、含められている。紙の場合、表面は、紙を構成する木繊維または他の繊維の互いに絡み合う網目の結果、微視的に非常に構造化されている。また、この図は、およそ10ミクロンである木繊維に関する特徴的な長さスケールも例示する。この寸法は、回折を生じさせ、したがって、スペックルを生じさせ、さらに、繊維の向きに依存するプロファイルを有する散漫散乱も生じさせる、この実施例のコヒーレントな光線の光波長に対する正しい関係を有する。このため、リーダが、特定のクラスの商品のために設計されるべき場合、レーザの波長は、走査されるべきクラスの商品の構造特徴サイズに合わせられることが可能であることが、認識されよう。また、この図から、各紙の局所表面構造は、個々の木繊維がどのように並んでいるかに、その構造が依存するという点で、一意であることが明白である。このため、紙は、自然の法則によって支配されるプロセスによって作られている結果、一意である構造を有するという点で、先行技術の特殊樹脂トークンまたは磁気材料堆積物などの、特別に作成されたトークンとまったく異ならない。同じことは、他の多くのタイプの物品にも当てはまる。
【0068】
図8Bは、プラスチック表面に関する均等のイメージを示す。この原子間力顕微鏡イメージは、巨視的には平滑なプラスチック表面の不均一な表面を明確に示す。この図から推測することができるとおり、この表面は、図8Aに示される紙表面より平滑であるが、このレベルの表面起伏でさえ、この実施例のシグネチャ生成スキームを使用して一意に識別されることが可能である。
【0069】
つまり、様々な日常的な物品から、一意の特性が、単純明快な仕方で測定可能である時に、特別に加工されたトークンを作成する労力および費用を引き受けるのは、基本的に無意味である。次に、物品の表面(または、透過の場合、内部)の自然な構造を利用する散乱信号のデータ収集および数値処理を説明する。
【0070】
図9Aは、図1のリーダの光検出器16a〜16dの単一の光検出器からの生のデータを示す。グラフは、ポイント数n(図2参照)に対する信号強度Iをa.u.(任意の単位)でプロットする。I=0〜250の間で変動する高い方のトレースは、光検出器16aからの生の信号データである。低い方のトレースは、およそI=50における、マーカ28(図2参照)からピックアップされた符号器信号である。
【0071】
図9Bは、符号器信号で線形化された後の図10Aの光検出器データを示す(x軸は、図10Aとは異なるスケール上にあるものの、このことは重要ではないことに注意されたい)。前述したとおり、スキャナに対する物品の動きが、十分に線形である場合、アラインメントマークに対する線形化を利用する必要はまったくない可能性がある。さらに、強度の平均が、計算され、強度値から引かれている。このため、処理されたデータ値は、0を挟んで上下に変動する。
【0072】
図9Cは、デジタル化の後の図9Bのデータを示す。採用されるデジタル化スキームは、あらゆる正の強度値が、値1に設定され、あらゆる負の強度値が、0に設定される単純なバイナリスキームである。代わりに、多状態デジタル化、または他の多くのデジタル化アプローチの任意のアプローチが使用されることも可能であることが、認識されよう。デジタル化の最も重要な特徴は、単に、同一のデジタル化スキームが、一貫して適用されることである。
【0073】
図10は、物品のシグネチャが、走査からどのように生成されるかを示す流れ図である。
【0074】
ステップS1は、光検出器のそれぞれにおける光強度が、走査の全時間中、およそ1ミリ秒ごとに獲得される、データ獲得ステップである。同時に、符号器信号が、時間に応じて獲得される。走査モータが、高い度合いの線形化精度を有する場合(ステップモータの場合のように)、データの線形化は、要求されない可能性があることに留意されたい。データは、ADC31からのデータを取り込んで、PIC30によって獲得される。データポイントは、PIC30からPC34にリアルタイムで転送される。代替として、データポイントは、PIC30内部のメモリの中に格納され、その後、走査の終了時にPC34に送られることも可能である。各回の走査において収集される検出器チャネル当たりのデータポイントの数nは、以下においてNと定義される。さらに、値ak(i)が、光検出器kからの格納された第i番の強度値と定義され、ただし、iは、1からNまでに及ぶ。そのような走査から得られた2つの生のデータセットの例が、図9Aに示される。
【0075】
ステップS2は、数値補間を使用して、ak(i)の拡大および縮小を局所的に行って、符号器遷移が、時間的に均等に離隔しているようにする。これにより、モータ速度の局所的変動が補正される。このステップは、PC34においてコンピュータプログラムによって実行されることが可能である。
【0076】
ステップS3は、オプションのステップである。実行された場合、このステップは、時間に関してデータを数値的に差別化する。また、弱い平滑化関数をデータに適用することも望ましい可能性がある。差別化は、信号からの互いに関係していない寄与を、互いに関係する(スペックル)寄与に比べて、弱める役割をするので、非常に構造化された表面に関して役立つ可能性がある。
【0077】
ステップS4は、各光検出器に関して、N個のデータポイントにわたる記録された信号の平均値がとられるステップである。各光検出器に関して、この平均値が、データポイントのすべてから引かれて、データが、0の強度を中心に分布しているようにする。線形化が行われ、計算された平均値が引かれた後の走査データセットの例を示す、図9Bを参照する。
【0078】
ステップS5は、アナログの光検出器データをデジタル化して、走査を表すデジタルシグネチャを計算する。デジタルシグネチャは、次の規則を適用することによって得られる。すなわち、ak(i)>0は、バイナリ「1」にマップされ、ak(i)<=0は、バイナリ「0」にマップされる。デジタル化されたデータセットは、dk(i)と定義され、ただし、iは、1からNまでに及ぶ。物品のシグネチャは、説明したばかりの強度データのデジタル化されたシグネチャに加えて、さらなる成分を組み込むことが可能である。次に、これらのさらなるオプションのシグネチャ成分を説明する。
【0079】
ステップS6は、より小さい「サムネイル」デジタルシグネチャが作成されるオプションのステップである。このステップは、m個の読み取り値の隣接するグループを一緒に平均することにより、または、より好ましくは、第c番ごとのデータポイントを選ぶことによって行われ、ただし、cは、サムネイルの圧縮係数である。平均することは、ノイズを不釣合いに増幅するので、第c番ごとのデータポイントを選ぶことの方が好ましい。次に、ステップS5で使用されるのと同一のデジタル化則が、縮小されたデータセットに適用される。サムネイルデジタル化は、tk(i)と定義され、ただし、iは、1からN/cまでに及び、cは、圧縮係数である。
【0080】
ステップS7は、複数の検出器チャネルが存在する場合に適用可能な、オプションのステップである。追加の成分は、異なる光検出器から得られた強度データ間で計算される相互相関成分である。2つのチャネルでは、可能な1つの相互相関係数が存在し、3つのチャネルでは、3つまでの相互相関係数が存在し、4つのチャネルでは、6つまでの相互相関係数が存在するといった具合である。相互相関係数は、材料タイプの良好な標識であることが分かっているので、有用である。例えば、所与のタイプのパスポート、またはレーザプリンタ用紙などの、ある特定のタイプの文書に関して、相互相関係数は、常に、予測可能な範囲内に入るように見受けられる。正規化された相互相関が、ak(i)とal(i)の間で計算されることが可能であり、ただし、k≠lであり、かつk、lは、光検出器チャネル数のすべてにわたって変化する。正規化された相互相関関数Γは、以下のとおり定義される。すなわち、
【0081】
【数1】
【0082】
後の検証において使用するために格納されることが可能な相互相関関数の別の態様は、相互相関関数におけるピークの幅、例えば、FWHM(半値全幅)である。検証処理における相互相関係数の使用については、後段でさらに説明する。
【0083】
ステップS8は、信号強度分布を示す単純な強度平均値を計算することである別のオプションのステップである。この計算は、異なる検出器に関する平均値の各値の全体的な平均であっても、ak(i)のrms(自乗平均)値などの、各検出器に関する平均であってもよい。検出器が、前述したリーダの場合のように、ペアで、垂直入射のいずれの側にも配置される場合、各検出器ペアに関する平均が、使用されてもよい。強度値は、サンプルの全体的な反射率および粗さの単純な示度であるので、材料タイプに関する良好な粗いフィルタとなることが分かっている。例えば、強度値として、平均値、すなわち、DCバックグラウンドを除去した後の、正規化されていないrms値を使用することができる。
【0084】
物品を走査することから得られたシグネチャデータは、検証目的で、シグネチャデータベースの中に保持されるレコードと比較され、かつ/またはデータベースに書き込まれて、シグネチャの新たなレコードが追加されて、既存のデータベースが拡張されることが可能である。
【0085】
新たなデータベースレコードは、ステップS5で獲得されたデジタルシグネチャを含む。このレコードは、オプションとして、各光検出器チャネルに関してステップS6で獲得される、より小さいサムネイルバージョン、ステップS7で獲得される相互相関係数、およびステップS8で獲得される平均値の1つまたは複数によって補足されることが可能である。代替として、サムネイルは、高速検索のために最適化されたサムネイル独自の別個のデータベースに格納され、残りのデータ(サムネイルを含む)が、メインデータベース上に格納されてもよい。
【0086】
図11は、走査から得られた物品のシグネチャが、シグネチャデータベースに照らして、どのように検証されることが可能であるかを示す流れ図である。
【0087】
単純な実施形態では、データベースは、シグネチャデータの完全なセットに基づいて、単に検索されて、合致が見出されることが可能である。しかし、検証プロセスをスピードアップするのに、プロセスは、前述したとおりの、計算された平均値および相互相関係数に基づく、より小さいサムネイル、および事前スクリーニングを使用することができる。
【0088】
検証ステップV1は、検証プロセスの最初のステップであり、このステップは、前述したプロセスに従って物品を走査する。すなわち、走査ステップS1からS8までを実行することである。
【0089】
検証ステップV2は、サムネイルエントリのそれぞれを取り上げ、前記エントリとtk(i+j)との間の合致するビットの数を評価し、ただし、jは、走査される領域の位置付けの誤差を補償するように変えられるビットオフセットである。jの値が、特定され、次に、最大数の合致するビットをもたらすサムネイルエントリが、特定される。このエントリが、さらなる処理のために使用される「ヒット」である。
【0090】
検証ステップV3は、走査されたデジタルシグネチャに照らして、記録のために格納された完全なデジタルシグネチャを解析する前に実行される、オプションの事前スクリーニング試験である。この事前スクリーニングにおいて、走査ステップS8で得られたrms値が、ヒットのデータベースレコードの中の対応する格納された値と比較される。それぞれの平均値が事前定義された範囲内に適合しない場合、この「ヒット」は、さらなる処理から棄却される。すると、前記物品は、検証されないものとして棄却される(すなわち、検証ステップV6にジャンプして、不合格結果を発行する)。
【0091】
検証ステップV4は、完全なデジタルシグネチャを解析する前に実行される、さらなるオプションの事前スクリーニング試験である。この事前スクリーニングにおいて、走査ステップS7で獲得された相互相関係数が、ヒットのデータベースレコードの中の対応する格納された値と比較される。それぞれの相互相関係数が、事前定義された範囲内に適合しない場合、この「ヒット」は、さらなる処理から棄却される。すると、前記物品は、検証されないものとして棄却される(すなわち、検証ステップV6にジャンプして、不合格結果を発行する)。
【0092】
検証ステップV4において実行されることが可能な相互相関係数を使用する別の検査は、相互相関関数におけるピークの幅を検査することであり、ただし、相互相関関数は、以下のとおり、前述の走査ステップS7における最初の走査から格納された値と、再走査された値とを比較することによって評価される。すなわち、
【0093】
【数2】
【0094】
再走査されたピークの幅が、最初の走査の幅より相当に高い場合、そのことは、再走査された物品が、不正操作されている、または、それ以外で疑わしいことを示すものとして解釈されることが可能である。例えば、このチェックは、走査される表面から光検出器によって予期されるのと同一の強度変化を有するバーコード、またはその他のパターンを印刷することにより、システムを騙そうと試みる詐欺師を打ち負かさなければならない。
【0095】
検証ステップV5は、走査ステップS5で獲得された、走査されたデジタルシグネチャと、ヒットのデータベースレコードの中の対応する格納された値との間の主な比較である。格納されたデジタル化された完全なシグネチャ、dkdb(i)が、k個の検出器チャネル上のq個の隣接するビットのn個のブロックに分割され、すなわち、ブロック当たりqk個のビットが、存在する。qの通常の値は、4であり、kの通常の値は、4であり、通常、ブロック当たり16ビットとなる。次に、そのqk個のビットが、格納されたデジタルシグネチャdkdb(i+j)の中の対応するqk個のビットと照合される。前記ブロック内の合致するビットの数が、何らかの事前定義された閾値zthresh以上である場合、合致するブロックの数が、インクリメントされる。zthreshの通常の値は、13である。以上が、n個すべてのブロックに関して繰り返される。このプロセス全体が、jの異なるオフセット値に関して繰り返されて、最大数の合致するブロックが見出されるまで、走査される領域の位置付けの誤差が補償される。Mを、合致するブロックの最大数と定義すると、偶然の合致の確率は、以下を評価することによって計算される。すなわち、
【0096】
【数3】
【0097】
ただし、sは、任意の2つのブロック間の偶然の合致の確率(この確率は、zthreshの選択された値に依存する)であり、Mは、合致するブロックの数であり、p(M)は、M個以上のブロックが偶然に合致する確率である。sの値は、類似した材料の異なる物体の走査、例えば、紙の文書の数回の走査からのデータベース内のブロックを比較することによって決定される。q=4、k=4、およびzthreshold=13の場合、sの通常の値は、0.1である。qk個のビットが、完全に独立である場合、確率理論は、zthreshold=13に関してs=0.01を与える。経験的には、より高い値が見出されるという事実は、k個の検出器チャネルの相互関係のため、および有限のレーザスポット幅に起因するブロック内の隣接するビット間の相互関係のためでもある。紙の通常の走査は、その紙に関するデータベースエントリに照らして比較されると、総数510ブロックのうち約314個の合致するブロックをもたらす。前述の数式に関してM=314、n=510、s=0.1に設定することにより、10-177という偶然の合致の確率がもたらされる。
【0098】
検証ステップV6が、検証プロセスの結果を発行する。検証ステップV5で得られた確率結果が、ベンチマークが事前定義された確率閾値である合格/不合格試験において使用されることが可能である。このケースでは、確率閾値は、システムによってあるレベルに設定されても、ユーザによって選択されたレベルに設定される可変パラメータであってもよい。代替として、確率結果は、確率自体として生の形態で、または相対的な用語(例えば、合致なし/不良な合致/良好な合致/非常によい合致)もしくは他の分類を使用する、変形された形態で、信頼度レベルとしてユーザに出力されることが可能である。
【0099】
多くの変種が可能であることが、認識されよう。例えば、相互相関係数を事前スクリーニング成分として扱う代わりに、相互相関係数が、メインシグネチャの一部として、デジタル化された強度データと一緒に扱われることも可能である。例えば、相互相関係数は、デジタル化されて、デジタル化された強度データに加えられることも可能である。また、相互相関係数は、独自にデジタル化されて、ビットストリングなどを生成するのに使用されることも可能であり、次に、それらのビットストリングなどが、ヒットを見出すためにデジタル化された強度データのサムネイルに関して前述したのと同じ仕方で検索されることも可能である。
【0100】
このように、以上、物品を走査して、その物品の本質的特性に基づくシグネチャを得るための、いくつかの例示的な構成を説明してきた。また、そのシグネチャが、走査中に収集されたデータからどのように生成されることが可能であるか、およびそのシグネチャが、どのように同一の物品、または異なる物品からの後の走査と比較されて、同一の物品が、その後の走査において走査されたもっともらしさはどれぐらいかという測度が提供されることが可能であるかの実施例も説明してきた。
【0101】
そのようなシステムは、多くの応用先を有し、それらの応用先の中には、詐欺防止およびアイテムトレーサビリティのためのアイテムのセキュリティスクリーニングおよび信頼度スクリーニングが含まれる。
【0102】
一部の実施例では、走査された物品からシグネチャを抽出するための方法は、例えば、延伸または収縮によって引き起こされた物品の変形にかかわらず、前記物品の確実な認識を提供するように最適化されることが可能である。物品のそのような延伸および収縮は、例えば、紙ベースの、またはボール紙ベースの物品に対する水害によって引き起こされる可能性がある。
【0103】
また、物品は、スキャナ内部のセンサに対する物品の相対速度が、非線形である場合、スキャナには、延伸されて、または収縮して見える可能性がある。これは、例えば、物品が、コンベアシステムに沿って動かされている場合、または物品が、前記物品を把持する人間によってスキャナを通るように動かされている場合、生じる可能性がある。これが生じる可能性の高いシナリオの例は、人間が、例えば、前述の図6A、図6B、および図6Cに関連して説明したようなスキャナを使用して、銀行カードを走査する場合である。
【0104】
前述したとおり、スキャナが、スキャナユニット内部で、スキャナに対して、またはスキャナ内で静止状態に保たれている物品に対して動くスキャンヘッドに基づく場合、線形化誘導が、オプションの距離マーク28によって提供されて、スキャンヘッドの動きの非線形性に対処することが可能である。物品が、人間によって動かされる場合、これらの非線形性は、大幅に大きくなる可能性がある。
【0105】
これらの非線形効果によって引き起こされる可能性がある認識問題に対処するのに、物品の走査の解析段階を調整することが可能である。このため、次に、変形された検証手続きを、図12を参照して説明する。この実施例において実施されるプロセスは、データのブロックに関する解析を使用して、非線形性に対処する。
【0106】
図12に従って実行されるプロセスは、図10に関連して説明したが、この図の内容を分かりにくくしないように、図12には示されていない、データを平滑化し、差別化するステップ、平均値を計算し、引くステップと、シグネチャおよびサムネイルを獲得するためのデジタル化のステップとのいくつか、またはすべてを含むことが可能である。
【0107】
図12に示されるとおり、ブロックに関する解析を使用する検証走査のための走査プロセスは、物品の走査を実行して、物品の本質的な特性を記述するデータを獲得することにより、ステップS21で始まる。この走査されたデータが、次に、ステップS22で、隣接するブロックに分割される(この分割は、デジタル化、および平滑化/差別化などの前、または後に実行されることが可能である)。一実施例では、64mmという走査長が、8つの等しい長さのブロックに分割される。したがって、各ブロックは、走査された物品の走査された領域のサブセクションを表す。
【0108】
ブロックのそれぞれに関して、ステップS23で、物品が比較されることが意図される格納された各シグネチャに関する均等のブロックに照らして、相互相関が、実行される。この相互相関は、各ブロックに関して1つのサムネイルを用いるサムネイルアプローチを使用して実行されることが可能である。次に、これらの相互相関計算の結果が、解析されて、相互相関ピークのロケーションが識別される。次に、ステップS24で、相互相関ピークの、前記ロケーションが、完全に線形の関係が、物品の最初の走査と後の走査との間で存在するとした場合の、ピークの予期されるロケーションと比較される。
【0109】
この関係は、図13A、図13B、および図13Cで示されるとおり、グラフで表現されることが可能である。図13Aの実施例では、相互相関ピークは、まさに予期されるとおりの場所にあり、したがって、物品に対するスキャンヘッドの動きは、完全に線形であり、物品は、延伸または収縮を経験していない。このため、予期されるピークに対する実際のピーク位置のプロットは、原点を通り、1という勾配を有する直線をもたらす。
【0110】
図13Bの実施例では、相互相関ピークは、予期されるよりも近寄っており、したがって、最良適合の線の勾配は、1より小さい。このため、物品は、最初の走査時の物品の物理的特性と比べて、収縮している。また、最良適合線は、プロットの原点を通らない。このため、物品は、最初の走査時の物品の位置と比べて、スキャンヘッドに対して偏移している。
【0111】
図13Cの実施例では、相互相関ピークは、直線を形成しない。この実施例では、相互相関ピークは、y2関数を表す曲線に近似的に合う。このため、スキャンヘッドに対する物品の動きは、走査中に遅くなっている。また、最良適合曲線は、原点を通らないので、物品は、最初の走査時の物品の位置と比べて偏移していることが明らかである。
【0112】
様々な関数が、相互相関ピークの点のプロットに試験的に合わせられて、最もよく適合する関数が見出されることが可能である。このため、延伸、収縮、位置合わせ不良、加速、減速、および以上の組合せを考慮に入れる曲線が、使用されることが可能である。適切な関数の例には、直線関数、指数関数、三角関数、x2関数、およびx3関数が含まれることが可能である。
【0113】
ステップS25で、最良適合の関数が識別されると、ステップS26で、各相互相関ピークが、前記ピークの予期される位置からどれだけ偏移しているかを表す変化パラメータセットが、算出されることが可能である。次に、ステップS27で、これらの補償パラメータが、走査からのデータに対する収縮、延伸、位置合わせ不良、加速、または減速の効果を実質的に逆にするために、ステップS21で取り込まれた走査からのデータに適用されることが可能である。認識されるとおり、ステップS25で獲得される最良適合関数が、走査データによく合うほど、補償効果は、良好になる。
【0114】
次に、ステップS28で、ステップS22の場合と同様に、補償された走査データが、隣接するブロックに細分される。次に、ステップS29で、これらのブロックが、格納されたシグネチャからのデータのそれぞれのブロックと個々に相互相関させられて、相互相関係数が得られる。今回は、相互相関ピークの大きさが、解析されて、ステップS29において一意性ファクタが算出される。このため、走査された物品が、格納されたシグネチャが作成された際に走査された物品と同一であるかどうかが判定されることが可能である。
【0115】
したがって、以上、走査される物品の物理的変形、およびスキャナに対する物品の動きの非線形性を補償するための方法の実施例を説明してきた。この方法を使用すると、走査される物品は、前記物品の、より早期の走査から得られた、前記物品に関する格納されたシグネチャと照らして検査されて、高い確度レベルで、その後の走査において同一の物品が存在するか否かが判定されることが可能である。その結果、容易に歪められる材料で作られた物品が、確実に認識されることが可能である。また、物品に対するスキャナの動きが、非線形であることが可能なスキャナが、使用されて、動き制御要素を有さない低価格のスキャナの使用が可能にされることも可能である。
【0116】
物品の本質的な特性に基づいて生成されたシグネチャのブロックに関する解析を使用して検出されることが可能な物品の別の特徴が、物品の局所的損傷の特徴である。例えば、そのような技術は、最初の記録走査の後に物品に行われた変更を検出するのに使用されることが可能である。
【0117】
例えば、パスポート、IDカード、および運転免許証などの多くの文書が、保持者の写真を含む。そのような物品の真正性走査が、前記写真の一部分を含む場合、前記写真に行われた改変は、検出される。シグネチャを10のブロックに分割する恣意的な例をとると、それらのブロックの3つが文書上の写真を範囲に含み、残りの7つが背景材料などの、前記文書の別の部分を範囲に含むことが可能である。写真が置き換えられた場合、その文書の後の再走査は、変更がまったく生じていない7つのブロックに関して良好な合致をもたらすものと予期されることが可能であるが、置き換えられた写真は、非常に不良な合致をもたらす。それら3つのブロックが、写真に対応することを知っていることにより、3つすべてが非常に不良な合致をもたらすという事実は、シグネチャ全体にわたる平均スコアにかかわらず、前記文書の検証を自動的に不合格にするのに使用されることが可能である。
【0118】
また、多くの文書は、1名または複数名の個人の書かれた指示、例えば、パスポート、運転免許証、またはIDカードによって身元確認される個人の名前、または銀行口座保持者の名前を含む。また、多くの文書は、保持者または証明者の書かれた署名が加えられる箇所も含む。検証のために、そこから得られたシグネチャのブロックに関する解析を使用することにより、文書上に印刷された、または書かれた名前、または他の重要な語もしくは番号を改変する変更が、検出されることが可能である。改変された印刷または書き込みの位置に対応するブロックは、変更がまったく生じていないブロックよりも、はるかに低い品質の合致をもたらすものと予期されることが可能である。このため、変更された名前もしくは書かれた署名が、検出されることが可能であり、前記文書の全体的な合致が、合格結果を得るだけ十分に高い場合でも、前記文書が、検証試験において不合格にされることが可能である。
【0119】
IDカード300の例が、図300に示される。IDカード300は、印刷された保持者名302、保持者の写真304、保持者の署名306(この署名は、カード上に書かれても、書かれた署名の走査から印刷されても、あるいは電子的にキャプチャされた署名であってもよい)、および印刷されたカード番号308を含む。IDカードの詐欺的な改変から保護するため、カードの本質的な特性に基づいてシグネチャを生成するための走査領域は、それらの要素の1つまたは複数を含むことが可能である。様々な例示的な走査領域に、図15においてマークが付けられて、それらの可能性を例示している。例示的な走査領域321は、印刷された名前302の一部、および写真304の一部を含む。例示的な走査領域322は、印刷された名前の一部を含む。例示的な走査領域323は、署名306の一部を含む。例示的な走査領域324は、カード番号308の一部を含む。
【0120】
走査領域のために選択される領域および要素は、詐欺師が改変しようと試みる可能性が最も高い文書の要素を含め、いくつかの要因に依存することが可能である。例えば、写真を含むいずれの文書に関しても、最も可能性の高い改変標的は、前記写真が保持者を視覚的に特定するので、通常、その写真である。このため、そのような文書に関する走査領域は、有利には、前記写真の一部分を含むように選択されることが可能である。詐欺的な変更を受ける可能性がある別の要素は、ある個人が自身の名前以外の名前を有するふりをすることは容易であるが、別の個人の署名を複製することは、より難しいので、保持者の署名である。したがって、署名された文書に関して、特に、写真を含まない、そのような文書に関して、走査領域は、有利には、文書上の署名の一部分を含むことが可能である。
【0121】
したがって、一般的なケースにおいて、物品の真正性に関する試験は、シグネチャの全体に関する、検証シグネチャとレコードシグネチャとの間の十分に高い品質の合致、およびシグネチャの少なくとも選択されたブロックにわたる十分に高い一致を含むことが可能であることを見て取ることができる。このため、物品の真正性を評価することに重要な領域が、決定的な真正性結果に達するのにクリティカルなものとして選択されることが可能である。
【0122】
一部の実施例では、クリティカルなブロックとして選択されたブロック以外のブロックが、不良な合致結果を示すことが許されてもよい。このため、文書は、クリティカルなブロックが、良好な合致をもたらし、シグネチャが全体として、良好な合致をもたらす限り、いくつかの部分で破れている、またはそれ以外で損傷を受けているにもかかわらず、真性であるとして受け入れられてもよい。
【0123】
このように、以上、物品の局所的損傷を識別するための、および物品の所定の領域に局所的損傷または改変を有する物品を真性ではないとして棄却するためのシステム、方法、および装置の、いくつかの実施例を説明してきた。他の領域における損傷または改変は、無視されて、文書が真性として認識されることを可能にしてもよい。
【0124】
一部のスキャナ装置において、走査される領域がどこで始まり、どこで終わるかを特定することが困難である可能性があることも可能である。前述した実施例のうち、このことは、走査されるべき物品が、スロットの中を通過し、したがって、スキャンヘッドが、意図される走査領域よりも多く、物品を「見る」ことが可能な図6Bの実施例に関して、最も問題である。この困難に対処する1つのアプローチは、走査領域を、物品の端部で始まるものとして定義することである。スキャンヘッドにおいて受け取られるデータは、物品が、それまで自由空間であったところを通過させられると、明確なステップ変化を受けるので、スキャンヘッドにおいて取得されたデータを使用して、スキャンがどこで始まるかが特定されることが可能である。
【0125】
この実施例では、スキャンヘッドは、スキャナへの物品の適用に先立って機能可能である。このため、最初に、スキャンヘッドは、スキャンヘッドの前方の占有されていない空間に対応するデータを受け取る。物品が、スキャンヘッドの前方を通過させられるにつれ、スキャンヘッドによって受け取られるデータは、物品を記述するデータに即時に変化する。このため、このデータを監視して、物品がどこで始まるかが特定されることが可能であり、それに先立つすべてのデータは、破棄されることが可能である。物品最先端を基準とする走査領域の位置および長さが、いくつかの仕方で特定されることが可能である。最も簡単なのは、物品の全長を走査領域として、スキャンヘッドが、自由空間に対応するデータを再び拾い上げることにより、終端が検出されることが可能であるようにすることである。別の方法は、最先端から所定の回数の走査読み取り値で、記録されるデータを開始すること、および/または停止することである。物品が、常に、ほぼ同一の速度でスキャンヘッドを通り過ぎるものと想定すると、これにより、一貫した走査領域がもたらされる。別の代替は、物品上の実際のマークを使用して、走査領域を開始し、停止することであるが、そうすることは、キャプチャされたいずれのデータが、走査領域に対応し、いずれのデータが、破棄されることが可能であるかを特定する、さらなる作業を、データ処理の点で、要求する可能性がある。
【0126】
このように、以上、アイテムを走査して、前記物品の本質的な特性に基づくデータを収集するため、必要な場合、前記物品の損傷、または走査プロセスにおける非線形性を補償するため、および前記物品を、物品の以前の走査に基づく格納されたシグネチャと比較して、両方の走査に関して同一の物品が存在するかどうかを判定するための、いくつかの技術を説明してきた。
【0127】
物品の真正性または素性の検証のために、前述の図1から図14までを参照して説明した識別技術などのバイオメトリック技術を使用する際、バイオメトリック特性に基づくシグネチャの再現性に関して、困難が生じる可能性がある。詳細には、物品が、異なるシグネチャ生成装置、および異なる時刻においてシグネチャ生成プロセスを受ける場合、バイオメトリックシグネチャ生成システムが物品から生成される各シグネチャにおいて、わずかに異なる結果を返す持ち前の傾向と並んで、物品のわずかに異なる部分が、各回に提示されて、確実な検証をより困難にする可能性が、存在する。
【0128】
次に、これらの困難に対処するためのシステム、方法、および装置の実施例を説明する。最初に、図15を参照して、データベース作成のためのマルチスキャンヘッドシグネチャ生成装置について説明する。
【0129】
図15に示されるとおり、リーダユニット100が、リーダユニットの読み取りボリューム102内に提示される物品に関するシグネチャを作成するようにそれぞれ動作可能な2つの光学サブアセンブリ20を含むことが可能である。このため、アイテムが後に照合されて検証されることが可能なアイテムデータベースの中で、アイテムの記録のためのシグネチャを作成するように、走査のために提示されるアイテムは、2回走査されて、もっともらしい位置合わせ誤差の量だけ互いに空間的にオフセットされた2つのシグネチャが作成されることが可能である。このため、識別または真正性検証のためのアイテムの後の走査は、格納された両方のシグネチャと照合されることが可能である。一部の実施例では、前記格納された2つシグネチャのいずれかとの合致を、合致の成功と考えられることが可能である。
【0130】
一部の実施例では、さらなる読み取りヘッドが、使用されることが可能であり、したがって、3つ、4つ、またはそれより多くのシグネチャが、各アイテムに関して作成される。各スキャンヘッドは、意図される走査ロケーションに隣接する位置からのシグネチャをもたらすために、前記他のスキャンヘッドからオフセットされていることが可能である。このため、検証走査上の物品位置合わせ不良に対するより高い堅牢性を、提供することが可能である。
【0131】
スキャンヘッド間のオフセットは、物品の走査される部分の幅、物品全体サイズに対する、走査される領域のサイズ、検証走査中のもっともらしい位置合わせ不良の量、および物品材料などの要因に依存して、選択されることが可能である。
【0132】
このように、以上、物品が照合されて調べられて、前記物品の素性および/または真正性が検証されることが可能なシグネチャデータベースを作成するように、物品を走査するためのシステムを説明してきた。
【0133】
次に、物品データベースの中の複数のシグネチャを提供するための別のシステムの実施例を、図16を参照して説明する。
【0134】
図16に示されるとおり、リーダユニット100'が、単一の光学サブアセンブリ20と、位置合わせ調整ユニット104とを有することができる。使用の際、位置合わせ調整ユニット104は、リーダユニットの読み取りボリューム102に対する光学サブアセンブリ20の位置合わせを変更することができる。このため、読み取りボリュームの中に入れられた物品は、物品に関する複数のシグネチャを作成するように、異なる位置において光学サブアセンブリ20によって複数回、走査されることが可能である。この実施例では、位置合わせ調整ユニット104は、2つの異なるロケーションから読み取るように光学サブアセンブリを調整することができる。このため、識別または真正性検証のためのアイテムの後の走査は、格納された両方のシグネチャと照合されることが可能である。一部の実施例では、その格納された2つシグネチャのいずれかとの合致が、合致の成功と考えられることが可能である。
【0135】
一部の実施例では、さらなる読み取りヘッド位置が、使用されることが可能であり、したがって、3つ、4つ、またはそれより多くのシグネチャが、各アイテムに関して作成される。各走査ヘッド位置は、意図される走査ロケーションに隣接する位置からのシグネチャを提供するために、その他の位置からオフセットされることが可能である。このため、検証走査上の物品位置合わせ不良に対する、より高い堅牢性が、提供されることが可能である。
【0136】
走査ヘッド位置間のオフセットは、物品の走査される部分の幅、物品全体サイズに対する、走査される領域のサイズ、検証走査中のもっともらしい位置合わせ不良の量、および物品材料などの要因に依存して、選択されることが可能である。
【0137】
このように、以上、物品が照合されて調べられて、前記物品の素性および/または真正性が検証されることが可能なシグネチャデータベースを作成するように、物品を走査するためのシステムの別の実施例を説明してきた。
【0138】
記録走査(すなわち、物品が後に照合されて、検証されることが可能な参照シグネチャを作成する物品の走査)のために使用されるスキャナが、複数のスキャンヘッドおよび/または複数のスキャンヘッド位置を使用して、物品に関する複数のシグネチャを作成することができることを説明してきたが、後の検証走査のために同様のシステムを使用することも可能である。
【0139】
例えば、検証において使用するためのスキャナは、複数の検証走査シグネチャが生成されることを可能にする複数の読み取りヘッドを有することが可能である。これらの複数のシグネチャのそれぞれが、記録されたシグネチャのデータベースと比較されることが可能であり、このデータベース自体、記録された各アイテムに関して複数のシグネチャを含むことが可能である。各アイテムに関する、これらの異なるシグネチャは、様々である可能性があるが、これらのシグネチャはすべて、それでも、他のいずれのアイテムに関するいずれのシグネチャとも極めて異なるという事実のため、任意の1つの記録走査シグネチャと、任意の1つの検証走査シグネチャとの間の合致は、アイテムの素性および/または真正性に対する十分な信頼度をもたらすはずである。
【0140】
複数の読み取りヘッド検証スキャナは、前述の図15に関連して説明したのとほぼ同様に構成されることが可能である。同様に、複数の読み取りヘッド位置検証スキャナは、前述の図16に関連して説明したのとほぼ同様に構成されることが可能である。また、記録スキャナと検証スキャナの両方に関して、複合の複数スキャンヘッドのシステムと、スキャンヘッド当たり複数のスキャンヘッド位置を組み合わせて、単一のデバイスにすることができる。
【0141】
前述の実施形態を相当に詳細に説明してきたが、前述の開示を完全に理解すると、多数の変更形態および変形形態が、当業者には明白となろう。添付の特許請求の範囲は、すべてのそのような変更形態および変形形態、ならびに、それらの形態の均等物を包含するものと解釈されることを意図している。
【図面の簡単な説明】
【0142】
【図1】リーダ装置の実施例の概略側面図である。
【図2】図1のリーダ装置の読み取りボリュームが、どのようにサンプリングされるかを示す概略透視図である。
【図3】図1のリーダ装置の機能構成要素の概略ブロック図である。
【図4】図1のリーダ装置の外形を示す透視図である。
【図5】図1のリーダに関する外形の別の例を示す透視図である。
【図6A】代替のリーダ構成の概略断面図である。
【図6B】別の代替のリーダ構成の透視図である。
【図6C】別の代替のリーダ構成の透視図である。
【図7A】方向性光収集および全面的照明に基づくリーダのための代替のイメージング構成を概略で示す側面図である。
【図7B】方向性検出器が、細長い光線を使用した局所的照明と組み合わせて使用されるリーダのためのさらなる代替のイメージング構成の光学フットプリントを概略で示す平面図である。
【図8A】約0.5mm×0.2mmの面積を覆うイメージを有する紙表面の顕微鏡イメージを示す図である。
【図8B】約0.02mm×0.02mmの面積を覆うイメージを有するプラスチック表面の顕微鏡イメージを示す図である。
【図9A】光検出器信号および符号器信号からなる、図1のリーダを使用する単一の光検出器からの生のデータを示す図である。
【図9B】符号器信号で線形化し、振幅を平均した後の図9Aの光検出器データを示す図である。
【図9C】平均レベルに応じたデジタル化の後の図9Bのデータを示す図である。
【図10】物品のシグネチャが、走査からどのように生成されるかを示す流れ図である。
【図11】走査から得られた物品のシグネチャが、シグネチャデータベースに照らして、どのように検証されることが可能であるかを示す流れ図である。
【図12】図11の検証プロセスが、どのように改変されて、走査における理想的でない性質を見込むことが可能かを示す流れ図である。
【図13A】走査から収集された相互相関データの例を示す図である。
【図13B】走査される物品が歪んでいる走査から収集された相互相関データの例を示す図である。
【図13C】走査される物品が、非線形の速度で走査される走査から収集された相互相関データの例を示す図である。
【図14】真正性検証のための物品の概略図である。
【図15】マルチスキャンヘッドスキャナを概略で示す破断透視図である。
【図16】マルチスキャンヘッド位置スキャナを概略で示す破断透視図である。
【符号の説明】
【0143】
1 リーダ装置
10 読み取りアパーチャ
12 筐体
14 レーザ光ソース
15 レーザ光線
16a、16b、16c、16d 検出器
18 レンズ
19 フォトトランジスタ
20 光学サブアセンブリ
22 駆動モータ
300 IDカード
302 保持者名
304 保持者の写真
308 カード番号
322、323、324 走査領域
【技術分野】
【0001】
本発明は、真正性の検証に関し、詳細には、ただし、排他的にではなく、とりわけ、ID(個人識別)カード、販売可能な製品、重要な文書、またはその他のアイテムなどの、物品の真正性の検証に関する。
【背景技術】
【0002】
多くの従来の認証セキュリティシステムは、製造業者以外は誰であれ、実行するのが困難であるプロセスに依拠し、その困難は、資本設備の費用、技術的ノウハウの複雑さ、またはその両方によって課せられることが可能である。例は、銀行券における透かし、およびクレジットカード上、またはパスポート上のホログラムの備えである。残念ながら、犯罪者は、ますます巧妙になっており、元の製造業者が行うことができることは、実質的に何でも再現することができる。
【0003】
このため、各セキュリティトークンが、一意であること、ならびに、より重要なことには、測定可能であり、そのため、後の検証のための基礎として使用されることが可能な一意の特性を有することをもたらす、自然法則によって支配される何らかのプロセスを使用して、トークンを作成することに依拠する認証セキュリティシステムの知られているアプローチが、存在する。このアプローチによれば、トークンは、決められた仕方で製造され、測定されて、一意の特性が得られる。次に、その特性が、コンピュータデータベースの中に格納される、または、それ以外で、保持されることが可能である。このタイプのトークンは、担体物品、例えば、銀行券、パスポート、IDカード、重要な文書に埋め込まれることが可能である。その後、担体物品が、再び測定されることが可能であり、測定された特性が、データベースの中に格納された特性と比較されて、合致が存在するかどうかが確かめられることが可能である。
【0004】
セキュリティトークンは、情報にアクセスするのに、トランザクションを許可するのに、または他の多くの目的で使用されることが可能である。しかし、損傷したトークン、および不完全なトークン識別装置は、トークンが可能にすべき活動を実行する際の困難につながる可能性がある。
【0005】
本発明は、少なくとも部分的に、従来のシステムの問題および欠点を考慮されて作成された。
【0006】
本発明は、少なくとも部分的に、一意性が、トークンの磁気応答に影響を与える磁気材料の再現不能な欠陥によって提供される、磁気材料で作られたトークンを使用する認証技術を適用することに関する本発明人の研究からもたらされた(Cowburn、PCT/GB03/03917で詳細に説明される)。この研究の一環として、磁気材料が、バーコードフォーマットで、すなわち、いくつかの平行なストリップとして作られた。磁気リーダで磁界を掃引することによって、それらのストリップの一意の磁気応答を読み取ることとともに、バーコード上をレーザ光線で走査し、バーコードストリップ、ならびに、それらのストリップが表面に形成されている物品の様々な反射率を使用することにより、バーコードを読み取る光学スキャナが、組み込まれた。この情報は、バーコードが、例えば、銀行券に関してやはり前述したとおり(例えば、Kravolec、「Plastic tag makes foolproof ID」、Technology research news、2002年10月2日参照)、あるタイプのよく知られた自己認証スキームにおける一意の磁気応答のデジタルシグネチャを符号化するのに使用されたので、磁気特性に対して補足的であった。
【0007】
本発明人が驚いたことには、この光学スキャナを使用していた際、磁気チップが支持されていた紙の背景材料が、スキャナに一意の光応答を与えることが発見された。さらなる調査の後、様々なタイプのボール紙やプラスチックの表面などの、他の多くの未加工の表面が、同一の効果を示すことが確かめられた。さらに、この一意の特性が、少なくともある程度、スペックルから生じるが、非スペックルの寄与も含むことが、本発明人によって確かめられた。
【0008】
このように、特別に加工されたトークンを使用する必要なしに、または他の何らかの仕方で物品を特別に加工する必要なしに、スペックルベースの技術のすべての利点を得ることが可能であることが、見出されている。特に、多くのタイプの紙、ボール紙、およびプラスチックが、コヒーレントな光線から一意特性の散乱信号を与え、したがって、一意のデジタルシグネチャを、ほとんどあらゆる紙の文書、またはボール紙の梱包アイテムから得ることができることが、見出されている。
【0009】
セキュリティデバイスのために使用される前述の知られているスペックルリーダは、トークンの全体にレーザ光線を当て、もたらされるスペックルパターンの有意な立体角部分を、CCDを使用してイメージングして(例えば、英国特許第2 221 870号および米国特許第6584214号を参照)、多くの様々なデータポイントで構成されるトークンのスペックルパターンイメージを得ることに基づくように思われる。
【0010】
本発明人によって使用されるリーダは、このようには動作しない。リーダは、散乱されたレーザ光線から4つだけの信号成分を収集するように、角度が離隔された4つの単一チャネル検出器(4つの単純なフォトトランジスタ)を使用する。レーザ光線は、表面の非常に小さい部分のみにわたるスポットに集束させられる。そのスポットが表面上を走査させられるにつれ、信号が、表面上の様々な局所的な領域から、4つの単一チャネル検出器によって収集される。このため、物品からの特性応答は、物品表面上の多数(通常、数百または数千)の様々な局所的な領域からの独立した測定値で構成される。4つのフォトトランジスタが、使用されるものの、それらのフォトトランジスタの単独の1つからのデータだけを使用する解析は、一意の特性応答を、この単一のチャネルだけからも引き出すことができることを示す。しかし、それら4つのチャネルのさらなるチャネルが、応答に含められる場合、より高いセキュリティレベルが、得られる。
【特許文献1】国際公開第GB03/03917号パンフレット
【特許文献2】英国特許第2 221 870号明細書
【特許文献3】米国特許第6584214号号明細書
【非特許文献1】Kravolec、「Plastic tag makes foolproof ID」、Technology research news、2002年10月2日
【発明の開示】
【課題を解決するための手段】
【0011】
第1の態様から見ると、本発明は、物品識別方法を提供する。前記方法は、物品からのシグネチャを、その物品の本質的特性に基づいて特定するステップと、その特定されたシグネチャを、格納されたシグネチャと比較するステップとを含むことが可能である。また、前記方法は、特定されたシグネチャを、隣接するデータブロックに分割するステップと、各ブロックと格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するステップとを含むことが可能である。このため、物品を検証する際に、より高いレベルの細分性が、実現されることが可能である。
【0012】
一部の実施形態では、前記方法は、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するステップも含むことが可能である。また、前記方法は、前記特定されたシグネチャを調整するように前記補償値を使用して、特定されたシグネチャと格納されたシグネチャとの間の類似性結果を判定するステップも含むことが可能である。このため、延伸または収縮による損傷を受けた物品が、識別されることに成功することが可能である。また、識別精度を落とすことなしに、非線形のシグネチャ特定に対応がなされることも可能である。このため、シグネチャ生成ステップ中の様々な物理的位置合わせ偏差が補償されて、正しい比較結果が達せられることが可能にされる。
【0013】
一部の実施形態では、シグネチャを特定するステップは、価値権利トークンをコヒーレントな放射にさらすステップと、価値権利トークンの本質的構造からのコヒーレントな放射の散乱を測定するデータポイントセットを収集するステップと、そのデータポイントセットから価値権利トークンのシグネチャを特定するステップとを含む。このため、本質的特性は、物品が作られている材料の表面パターンであることが可能である。
【0014】
一部の実施形態では、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較するステップは、特定されたシグネチャのブロックと格納されたシグネチャの対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための補償値を算出するステップを含む。このため、予期される結果を使用して、走査中の物品の物理的位置合わせ偏差が取り除かれることが可能である。
【0015】
一部の実施形態では、補償値を算出するステップは、ブロック比較のそれぞれに関する相互相関ピークロケーションに対する最良適合の関数を推定するステップを含み、最良適合の関数は、予期される相互相関ピークロケーションからの平均偏差を表す。このため、予期される位置からの平均偏差が、補償のために使用されることが可能である。この平均偏差は、多くの仕方で測定されることが可能であり、直線関数、指数関数、三角関数、およびx2関数を含むことが可能な、様々な関数の1つである最良適合の関数をもたらすことが可能である。
【0016】
一部の実施形態では、前記方法は、特定されたシグネチャを複数の格納されたシグネチャと比較するステップをさらに含む。特定されたシグネチャとそれら複数の格納されたシグネチャとの間の最も近い合致結果が、見出されることが可能である。また、特定されたシグネチャが、格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定した場合、合致なしの結果が、見出されることも可能である。このため、アイテムは、アイテムシグネチャのデータベースと比較されて、そのアイテムが、そのデータベースのメンバであるかどうかが判定されることが可能である。これを使用して、製品、価値移転トークン、価値移転許可トークン、権利トークン、およびアクセストークンなどの、様々な物品の真正性が判定されることが可能である。
【0017】
一部の実施形態では、前記方法は、比較される各ブロックに関する類似性結果を計算することも含むことが可能である。一部の実施形態では、前記方法は、少なくとも1つの所定のブロックに関する類似性結果を、所定の類似性閾値と比較し、その少なくとも1つの所定のブロックに関する類似性結果が、所定の類似性閾値を下回っていた場合、それらのシグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すことも含むことが可能である。このため、物品のクリティカルな部分が、識別されることが可能であり、そのクリティカルな部分、およびシグネチャ全体に関して、明確な合致が、物品の真正性検証のために要求されることが可能である。
【0018】
第2の態様から見ると、本発明は、物品を識別するためのシステムを提供する。前記システムは、物品からのシグネチャを、その物品の本質的特性に基づいて特定するように動作可能なシグネチャ特定ユニットと、特定されたシグネチャを格納されたシグネチャと比較するように動作可能な比較ユニットとを含むことが可能である。前記比較ユニットは、特定されたシグネチャを、隣接するデータブロックに分割し、各ブロックと、格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するように動作可能である。このため、物品の高い細分性の解析が、実行されることが可能である。
【0019】
一部の実施形態では、前記比較ユニットは、各ブロック比較からの比較結果の属性を、そのブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するようにさらに動作可能である。前記比較ユニットは、特定されたシグネチャを調整するように補償値を使用して、特定されたシグネチャと格納されたシグネチャとの間の類似性結果を、判定するようにさらに動作可能である。このため、延伸または収縮による損傷を受けた物品が、識別されることに成功することが可能である。また、識別精度を落とすことなしに、非線形のシグネチャ特定に対応がなされることも可能である。このため、シグネチャ生成ステップ中の様々な物理的位置合わせ偏差が補償されて、正しい比較結果が達せられることが可能にされる。
【0020】
一部の実施形態では、前記比較ユニットは、比較される各ブロックに関して類似性結果を計算するように動作可能である。また、前記比較ユニットは、少なくとも1つの所定のブロックに関する類似性結果を、所定の類似性閾値と比較し、その少なくとも1つの所定のブロックに関する類似性結果が、所定の類似性閾値を下回っていた場合、それらのシグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すようにも動作可能である。このため、物品のクリティカルな部分が、識別されて、物品の他の領域と比べて、より高いレベルの精査を受けることが可能である。
【0021】
一部の実施形態では、物品の本来的な特性に関して収集されるデータの異なるデータが、物品に対するコヒーレント光線の動きを提供することにより、物品の異なる部分からの散乱と関係することが確実にされる。この動きは、固定されて保持される物品上で光線を動かすモータによってもたらされることが可能である。このモータは、サーボモータ、自走モータ、ステップモータ、または任意の適切なモータタイプであることが可能である。代替として、駆動は、低価格のリーダにおいて、手動であることも可能である。例えば、操作者は、物品がのせられたキャリッジを、静止した光線を横切るように動かすことにより、物品上を光線に走査させることもできる。コヒーレント光線による断面は、物品の投影よりも、通常、少なくとも1(好ましくは、少なくとも2)オーダ小さく、したがって、相当な数の独立したデータポイントが、収集されることが可能である。コヒーレント光線を物品において集束させる集束構成が、提供されることが可能である。集束構成は、コヒーレント光線を細長い焦点にもたらすように構成されてもよく、その場合、ドライブは、好ましくは、細長い焦点の長軸と交差する方向で、物品上でコヒーレント光線を動かすように構成される。細長い焦点は、好都合には、円柱レンズ、または均等のミラー構成を使用して提供されることが可能である。
【0022】
他の実施形態では、検出器構成が、物品のそれぞれの異なる部分からの散乱を感知するように配置され、構成された複数の検出器チャネルを含むという点で、データポイントの異なるデータポイントが、物品の異なる部分からの散乱と関係することが、確実にされることが可能である。これは、方向性検出器、光ファイバを使用した信号の局所的収集、またはその他の手段で達せられることが可能である。方向性検出器、または信号の他の局所的収集を使用すると、コヒーレント光線は、集束させられなくてもよい。実際、コヒーレント光線は、静止していて、サンプリングボリューム全体を照らすことも可能である。方向性検出器は、検出器要素に融合させられた、または検出器要素に対して、それ以外で固定された集束レンズによって実施されることが可能である。光ファイバが、マイクロレンズと併せて使用されてもよい。
【0023】
検出器構成が単一の検出器チャネルだけからなる場合に、実用的なリーダを作成することは、可能である。他の実施形態は、角度をなして配置され、読み取りボリュームのそれぞれの異なる部分に関するデータポイントグループを収集するように動作可能な検出器要素のグループ、好ましくは、いくつかの検出器要素の小さいグループを含む検出器構成を使用する。シグネチャが、同一のグループのデータポイント間の比較からの寄与を組み込む場合に、セキュリティ強化が提供される。この比較には、好都合には、相互相関がかかわることが可能である。
【0024】
1つだけの検出器チャネルを使用して、機能するリーダが作成されることが可能であるものの、好ましくは、少なくとも2つのチャネルが、存在する。これにより、検出器信号の間で相互相関が行われることが可能になり、そうすることは、シグネチャを特定することに関連する信号処理のために役立つ。2つから10までの検出器チャネルが、ほとんどのアプリケーションに適することものと想定され、2つから4つまでが、現在、装置の単純さとセキュリティとの間の最適なバランスと考えられている。
【0025】
検出器要素は、有利には、読み取りボリュームと交差する平面に位置するように配置され、ペアの各メンバは、コヒーレント光線の軸に対して、その平面において角度をなして配置され、好ましくは、1つまたは複数の検出器要素が、光線の軸のいずれの側にも存在する。しかし、非平面の検出器配置も、許容できる。
【0026】
異なる検出器から得られた信号の相互相関の使用は、セキュリティレベルを高めるため、さらに、時を経て、シグネチャをより確実に再現できることを可能にするためにも、貴重なデータを与えることが分かっている。スペックルパターンが本質的に互いに関係していない(パターンの対向するポイントからの信号を例外として)ので、相互相関の有用性は、科学的に見て、幾分、意外である。つまり、スペックルパターンに関して、励起ロケーションと交差する共通の平面において、異なる検出器が励起ロケーションに対して等しい大きさの角度をなして配置されているのでない限り、異なる検出器からの信号間の相互相関は、定義により、まったく存在しない。したがって、相互相関寄与を使用することの価値は、散乱信号のかなりの部分が、スペックルではないことを示す。非スペックルの寄与は、紙の繊維のよじれなどの、複雑な表面からの直接散乱、または散漫散乱の寄与の結果と見なされることが可能である。現在、スペックル散乱信号寄与と非スペックル散乱信号寄与の相対的重要度は、明らかではない。しかし、今日まで実行された実験から、検出器は、純粋なスペックルパターンを測定しているのではなく、スペックル成分と非スペックル成分の合成信号を測定していることが、明らかである。
【0027】
シグネチャに相互相関成分を組み込むことは、セキュリティを向上させるためにも有益である可能性がある。この理由は、高解像度の印刷を使用して、真性の物品の表面にわたるコントラスト変化を再現する物品を作成することが可能だとしても、真性の物品を走査することによって得られる相互相関係数と合致させることはできないからである。
【0028】
一実施形態では、検出器チャネルは、単純なフォトトランジスタの形態における個々の検出器構成要素で構成される。PINダイオードまたはフォトダイオードなどの、他の単純な個々の構成要素が、使用されることも可能である。また、検出器アレイなどの集積された検出器構成要素が、使用されることも可能であるが、そうすることは、デバイスの費用および複雑さを増大させる。
【0029】
また、走査されるべき物品に当たるレーザ光線の照射角度を変更する初期の実験から、実際には、物品が、測定の合間に劣化した場合でさえ、ほとんど変化なしに、同一の表面から繰り返し測定されることが可能な特性を得るために、レーザ光線が、走査される表面にほぼ垂直に入射することが好ましいように思われる。少なくとも一部の知られているリーダは、斜め入射を使用する(英国特許第2 221 870号を参照)。ひとたび理解されると、この効果は、明白であるように思われるが、この効果は、英国特許第2 221 870号のスペックルリーダ、および、実のところ、本発明人によって構築された最初の試作品のリーダを含め、一部の先行技術のスペックルリーダの設計によって証明されるとおり、明らかに、直ちに明白ではない。斜め入射を有する、本発明人の最初の試作品のリーダは、実験室条件において、それなりにうまく機能したが、物品として使用された紙の劣化に極めて影響されやすかった。例えば、その紙を指でこすることで、再測定時に相当な違いが現れるようにするのに十分だった。第2試作品のリーダは、垂直入射を使用し、定常的な扱いによる紙の劣化に対して、さらに、レーザプリンタを含め、様々なタイプのプリンタの中を通ること、写真複写機の中を通ること、書くこと、印刷すること、オーブンの中で意図的に焦がすこと、およびくしゃくしゃにして、再び平らにすることなどの、より深刻な事象に対しても、堅牢であることが分かっている。
【0030】
したがって、コヒーレント光線が、物品に、ほぼ垂直な入射で当たるように、読み取りボリューム上にコヒーレント光線を向けるよう、ソースを装着することが、有利である可能性がある。ほぼ垂直な入射とは、±5度、±10度、または±20度という意味である。代替として、光線は、物品に対して斜め入射を有するように向けられることが可能である。そうすることは、前記光線が、物品上で走査させられる場合、通常、悪影響を有する。
【0031】
また、詳細な説明において説明されるリーダにおいて、検出器構成は、読み取りボリュームから後方散乱される放射を検出するように反射配置されることにも留意されたい。しかし、物品が、透明である場合、検出器は、透過配置されることが可能である。
【0032】
シグネチャジェネレータは、あらかじめ記録されたシグネチャのデータベースにアクセスし、データベースが、読み取りボリュームの中に置かれた物品のシグネチャに対する合致を含むかどうかを確かめる比較を実行するように動作可能である。データベースは、リーダ装置の一部をなす大容量ストレージデバイスの一部であっても、遠隔ロケーションにあって、遠隔通信リンクを介してリーダによってアクセスされてもよい。遠隔通信リンクは、無線リンクおよび固定リンクを含め、任意の従来の形態をとることが可能であり、さらに、インターネットを介して利用可能であってもよい。データ獲得―処理モジュールは、少なくとも一部の動作モードにおいて、合致がまったく見出されない場合、シグネチャがデータベースに追加されることを可能にするように動作可能である。
【0033】
データベースを使用する際、シグネチャを格納することに加えて、データベースの中の、前記シグネチャを、文書の走査されたコピー、パスポート保持者の写真、製品の製造の場所および時刻に関する詳細、または販売可能な商品の意図される販売目的地に関する詳細(例えば、灰色の輸入を追跡するために)などの、物品についての他の情報に関連付けることも有用である可能性がある。
【0034】
本発明は、紙、ボール紙、およびプラスチックなどの、様々な異なる種類の材料で作られた物品の識別を可能にする。
【0035】
本来的な構造で意味するのは、前記物品が、前記物品の製造によって有する構造であり、物品に組み込まれたトークンまたは人工繊維によって与えられる構造などの、セキュリティ目的で特別に提供される構造とは区別される。
【0036】
紙またはボール紙で意味するのは、木材パルプまたは均等の繊維加工でできている任意の物品である。紙またはボール紙は、コーティングを施されること、またはセロハンなどの、透明な材料を含浸させられること、またはそのような材料で覆われることが可能である。表面の長期の安定が、特に懸念される場合、紙は、例えば、アクリル樹脂吹き付けの透明コーティングを施されてもよい。
【0037】
このため、データポイントは、コヒーレント光線によって照らされる位置に応じて収集されることが可能である。これは、物品上に局所的なコヒーレント光線を走査させること、または方向性検出器を使用して、物品の様々な部分からの散乱光を収集すること、またはその両方の組合せによって達せられることが可能である。
【0038】
シグネチャは、ほとんどのアプリケーションにおいてデジタルシグネチャであるものと想定される。現行の技術を使用したデジタルシグネチャの通常のサイズは、200ビットから8キロビットまでの範囲内にあり、ただし、現行では、高いセキュリティのために約2キロビットのデジタルシグネチャサイズを有することが好ましい。
【0039】
本発明のさらなる実施形態は、デジタルシグネチャをデータベースの中に格納するのではなく、権利トークンに、シグネチャから導き出されたラベルを付けることによって実行される。ただし、ラベルは、マシン可読符号化プロトコルに準拠する。
【0040】
次に、本発明の特定の実施形態を、単に例として、添付の図面を参照して説明する。
【発明を実施するための最良の形態】
【0041】
本発明は、様々な変形形態および代替の形態が可能であるが、特定の実施形態を、例として、図面に示し、本明細書で詳細に説明する。しかし、図面、および図面の詳細な説明は、本発明を、開示される特定の形態に限定することを意図するものではなく、それどころか、本発明は、添付の特許請求の範囲によって規定される本発明の範囲に含まれるすべての変形形態、均等形態、および代替形態に及ぶものとされることを理解されたい。
【0042】
電子商取引環境などの環境においてセキュリティサービスおよび許可サービスを提供するため、物理的アイテムを一意に識別するためのシステムが、詐欺の可能性を低減し、プロバイダとエンドユーザの両方のために、電子商取引システムの実際の信頼性と感じられる信頼性の両方を高めるのに使用されることが可能である。
【0043】
次に、そのようなアイテム識別を実行するのに適したシステムの実施例を、図1ないし図11を参照して説明する。
【0044】
図1は、リーダ装置1の第1実施例の概略側面図を示す。光学リーダ装置1は、装置の読み取りボリューム内に配置された物品(図示せず)からシグネチャを測定することを目的とする。読み取りボリュームは、筐体12におけるスリットである読み取りアパーチャ10によって形成される。筐体12は、装置の主な光学構成要素を含む。スリットは、x方向でより大きい長さを有する(図面における挿入軸を参照)。主要な光学構成要素は、コヒーレントレーザ光線15を生成するためのレーザソース14、および、16a、16b、16c、および16dというラベルが付けられた、この実施例では、k=4である、複数のk個の光検出器要素からなる検出器構成16である。レーザ光線15は、y方向(図面の平面に垂直な)に広がり、読み取りアパーチャの平面に位置する細長い焦点に、円柱レンズ18によって集束させられる。1つの例示的なリーダにおいて、細長い焦点は、約2mmの長軸寸法と、約40マイクロメートルの短軸寸法とを有する。これらの光学構成要素は、サブアセンブリ20内に含まれる。この実施例では、4つの検出器要素16a〜16dは、光線軸に対して様々な角度をなして交互配置で光線軸のいずれの側にも配置されて、読み取りボリューム内に存在する物品から反射散乱させられた光を収集する。この実施例では、オフセット角は、-70度、-20度、+30度、および+50度である。光線軸のいずれの側でも、これらの角度は、光学構成要素が収集するデータポイントが、可能な限り独立であるように、等しくならないように選択される。4つすべての検出器要素は、共通の平面に配置される。光検出器要素16a〜16dは、コヒーレントな光線が、読み取りボリュームから散乱される際に、筐体上に置かれている物品から散乱された光を検出する。図示されるとおり、源は、レーザ光線15の光線軸が、z方向にあり、したがって、レーザ光線16が、垂直入射で読み取りアパーチャ内の物品に当たるように、レーザ光線15を向けるように取り付けられる。
【0045】
一般に、焦点深度は、z方向における物品位置付けの違いが、読み取りアパーチャの平面における光線のサイズの大きな変化をもたらさないように、大きいことが望ましい。この実施例では、焦点深度は、スキャナに対する物品の位置が、ある程度、制御されることが可能な、良好な結果をもたらすのに十分なだけ大きい、約0.5mmである。焦点深度、開口数、および作動距離というパラメータは、互いに依存し、スポットサイズと焦点深度との間の、よく知られたトレードオフをもたらす。
【0046】
駆動モータ22が、矢印26で示されるとおり、適切なベアリング24、またはその他の手段を介して、光学サブアセンブリ20の直線の動きをもたらすために、筐体12内に配置される。このため、駆動モータ22は、読み取りアパーチャ10にわたるx軸方向でコヒーレント光線を直線的に動かす役割をして、光線15が、細長い焦点の長軸と交差する方向で走査させられるようにする。コヒーレント光線15は、光線15の焦点において、前記コヒーレント光線と垂直な平面、すなわち、読み取りアパーチャが設けられている筐体の壁の平面における読み取りボリュームの投影よりはるかに小さい、xz平面(図面の平面)における断面を有するようなサイズにされるので、駆動モータ22の走査は、コヒーレント光線15に、駆動モータ22の作用の下で、読み取りボリュームの多数の異なる部分をサンプリングさせる。
【0047】
図2は、このサンプリングを例示するように含められ、読み取り領域が、その領域にわたって細長い光線を走査させることにより、どのようにn回、サンプリングされるかを示す概略透視図である。集束させられたレーザ光線が、駆動の作用の下で、読み取りアパーチャに沿って走査させられるにつれての、レーザ光線のサンプリング位置が、長さ「l」、幅「w」の領域をサンプリングする、1からnまで番号が付けられた隣接する長方形によって表される。データ収集は、ドライブが、スリットに沿って走査させられるにつれ、n個の位置の各位置において信号を収集するように行われる。したがって、読み取りボリュームの、図示されるn個の異なる部分からの散乱と関係するk×n個のデータポイントのシーケンスが、収集される。
【0048】
概略で示されるのもまた、x方向、すなわち、走査方向に沿って、スリット10に隣接して、筐体12の下面に形成されたオプションの距離マーク28である。x方向における、これらのマーク間の例示的な間隔は、300マイクロメートルである。これらのマークは、細長い焦点の末端によってサンプリングされ、後段でさらに詳細に説明するとおり、x方向におけるデータの線形化を、そのような線形化が要求される場合に、提供する。測定は、スリットに隣接したマーク28の領域から光を収集するように構成された方向性検出器である、さらなるフォトトランジスタ19によって実行される。
【0049】
代替の実施例において、マーク28は、光学サブアセンブリ20の一部である専用の符号器エミッタ/検出器モジュール19によって読み取られることが可能である。符号器エミッタ/検出器モジュールは、バーコードリーダにおいて使用される。一実施例では、集束LED(発光ダイオード)および光検出器に基づくAgilent HEDS-1500モジュールが、使用されることが可能である。モジュール信号は、追加の検出器チャネルとしてPIC ADCに送り込まれる(後段の図3の説明を参照)。
【0050】
40マイクロメートルという焦点の例示的な小さい方のサイズ、および2cmというx方向における走査長で、n=500であり、k=4で2000のデータポイントが与えられる。k×nに関する値の通常の範囲は、所望されるセキュリティレベル、物品タイプ、検出器チャネルの数「k」、およびその他の要因に依存して、100<k×n<10000であるものと見込まれる。また、検出器kの数を増やすことにより、扱い、印刷などを介した物品の表面劣化に対する、測定値の影響されにくさを向上させることも分かっている。実際、今日まで使用された試作品で、経験則は、多種多様な表面に関して、まずまず高いセキュリティレベルをもたらすのに、独立したデータポイントの合計数、すなわち、k×nが、500以上でなければならないことである。スキャナが、1つの特定の表面タイプ、または1つの表面タイプグループだけに対して使用されることが意図される場合、他の最小値(より高い、またはより低い)が、適用されることも可能である。
【0051】
図3は、リーダ装置の機能構成要素の概略ブロック図である。モータ22が、電気的リンク23を介してPIC(プログラマブル割り込みコントローラ)30に接続される。検出器モジュール16の検出器16a〜16dが、それぞれの電気接続線17a〜17dを介して、PIC30の一部であるADC(アナログ―デジタル変換器)に接続される。同様の電気接続線21が、マーカ読み取り検出器19をPIC30に接続する。光リンクまたは無線リンクが、電気的リンクの代わりに、または電気的リンクと組合せで使用されてもよいことを理解されたい。PIC30は、データ接続32を介してPC(パーソナルコンピュータ)34とインターフェースをとる。PC34は、デスクトップであっても、ラップトップであってもよい。PCの代替として、他のインテリジェントデバイス、例えば、PDA(パーソナルデジタルアシスタント)または専用の電子ユニットが使用されてもよい。PIC30とPC34は、検出器16a〜16dによって収集されたデータポイントセットから、物品のシグネチャを特定するためのデータ獲得―処理モジュール36を共同で形成する。
【0052】
一部の実施例において、PC34は、インターフェース接続38を介して、dB(データベース)40へのアクセスを有することが可能である。データベース40は、PC34上でメモリの中に存在しても、PC34のドライブ上に格納されてもよい。代替として、データベース40は、PC34から遠隔であり、例えば、移動電話サービス、またはインターネットと組合せで無線LAN(ローカルエリアネットワーク)を使用して、無線通信によってアクセスされてもよい。さらに、データベース40は、PC34上にローカルで格納されるが、遠隔のソースから定期的にダウンロードされてもよい。データベースは、遠隔のエンティティによって管理されてもよく、このエンティティは、全体的なデータベースの一部分に限ってのアクセスを特定のPC34に与えてもよく、かつ/またはセキュリティポリシーに基づいて、データベースへのアクセスを制限してもよい。
【0053】
データベース40は、あらかじめ記録されたシグネチャのライブラリを含むことが可能である。PC34は、使用中、データベース40にアクセスして、データベース40が、読み取りボリューム内に置かれた物品のシグネチャとの合致を含むかどうかを確かめる比較を実行することができるように、プログラミングされることが可能である。また、PC34は、合致がまったく見出されない場合、シグネチャがデータベースに追加されることを可能にするようにプログラミングされることも可能である。
【0054】
PCとデータベースの間のデータフローの扱われ方は、PCのロケーション、ならびにPCの操作者と、データベースの操作者との間の関係に依存することが可能である。例えば、PCおよびリーダが、物品の真正性を確認するのに使用されている場合、PCは、新たな物品をデータベースに追加することができなくてもよく、実際、データベースに直接にアクセスせず、代わりに、比較のためにシグネチャをデータベースに供給してもよい。この構成では、データベースは、物品が真性であるかどうかを示す真正性結果をPCに提供することができる。他方、PCおよびリーダが、データベース内のアイテムを記録する、または検証するのに使用されている場合、データベースの中に格納するように、シグネチャが、データベースに提供されることが可能であり、比較は、まったく必要とされない可能性がある。しかし、この状況において、比較が実行されて、単一のアイテムが、データベースに2回、入力されるのを回避することも可能である。
【0055】
図4は、リーダ装置1の透視図であり、リーダ装置の外形を示す。筐体12、およびスリット形状の読み取りアパーチャ10が、見て取れる。また、物理的ロケーション補助42もはっきり見え、所与の形状の物品を、読み取りアパーチャ10に対するある固定位置に位置付けるために提供される。この実施例では、物理的ロケーション補助42は、文書または梱包ボックスの隅が位置付けられることが可能な直角ブラケットの形状である。補助42は、物品が、走査される必要がある場合にはいつでも、物品の同一の部分が、読み取りアパーチャ10内に位置付けられることが可能であることを確実にする。単純な角ブラケット、または均等物で、紙、パスポート、IDカード、および梱包ボックスなどの、明確な隅を有する物品には、十分である。他の形状の位置ガイドが、提供されて、CDおよびDVDを含む円形のアイテム、または円筒形の梱包容器などの、曲面を有するアイテムなどの、様々な形状のアイテムを受け入れることも可能である。1つのサイズおよび形状だけのアイテムが、走査されるべき場合、前記アイテムを受けるスロットが、設けられることが可能である。
【0056】
このように、以上、物品真正性の遠隔検証のためにセキュリティ機構において使用するのに適した走査―シグネチャ生成装置の実施例を説明してきた。そのようなシステムが、展開されて、ある物品が、複数のロケーションにおいて走査されることを可能にし、前記物品が、両方の事例において同一の物品であることを確実にするチェックが実行されることを可能にし、オプションとして、前記物品が、最初の走査と後の走査の間に不正操作されていないことを確実にするチェックが実行されることを可能にすることが可能である。
【0057】
図5は、物品位置付けが一貫していることを確実にする文書フィーダが提供される、リーダのための代替の物理的構成の実施例を示す。この実施例では、物品供給トレー61を取り付けた筐体60が、提供される。トレー61は、リーダによる走査のために1つまたは複数の物品62を保持することができる。前述したとおり、モータが供給ローラ64を駆動して、デバイスの中を通り、光学サブアセンブリ20の走査アパーチャの横断するように物品62を運ぶことができる。このため、物品62は、光学サブアセンブリと物品との間の相対的な動きが物品の動きによってもたられるような仕方で、前述したように光学サブアセンブリ20によって走査されることが可能である。そのようなシステムを使用して、走査されるアイテムの動きは、十分な線形性を有するモータを使用して制御されることが可能であり、したがって、距離マークおよび線形化処理の使用は、不必要である可能性がある。装置は、文書スキャナ、写真複写機、または文書管理システムのための任意の従来のフォーマットに従うことが可能である。そのようなスキャナは、単独シートを扱うことともに、またはそうする代わりに、ラインフィードシート(例えば、ミシン目の継ぎ目で複数のシートが一緒につなげられている)を扱うように構成されてもよい。
【0058】
このように、以上、自動化されたフィーダタイプのデバイスにおいて物品を走査するのに適した装置を説明してきた。供給構成の物理的構成に依存して、スキャナは、材料の1つまたは複数の単独シート、つながったシートもしくは材料、あるいは梱包ボール箱などの3次元アイテムを走査することができることが可能である。
【0059】
図6は、リーダに関するさらなる代替の物理的構成の実施例を示す。この実施例では、物品は、ユーザによってリーダを通るように動かされる。図6Aに示されるとおり、リーダ筐体70が、走査のために物品を挿入するためのスロット71を備えることが可能である。光学サブアセンブリ20が、前記スロットを通過させられる物品62を走査することができるように、スロット71内に向けられた走査アパーチャを備えることが可能である。さらに、ガイド要素72が、スロット71内に備えられて、光学サブアセンブリ20から正しい焦点距離に物品を導くのを助け、かつ/またはスロットの中を物品が一定の速度で通過することをもたらすことが可能である。
【0060】
図6Bに示されるとおり、リーダは、矢印によって示されるとおり、物品が、筐体70の中を長軸方向のスロットに沿って動かされる際に、物品を走査するように構成されることが可能である。代替として、図6Cに示されるとおり、リーダは、矢印によって示されるとおり、物品が、リーダ筐体70内に入り込むスロットの中に挿入される、またはそこから出される際に、物品を走査するように構成されてもよい。このタイプのスキャナは、カード、プラスチックシート、または金属シートなどの、少なくとも部分的に剛性である物品を走査するのに特に適していることが可能である。そのようなシートは、例えば、クレジットカード、または他の銀行カードなどのプラスチックアイテムであることが可能である。
【0061】
このように、以上、物品の手動で開始される走査のための構成を説明してきた。この構成は、銀行カードおよび/またはクレジットカードを走査するために使用されることが可能である。そのため、カードが、前記カードが、使用のために提示される端末装置において走査されることが可能であり、前記カードから取り込まれたシグネチャが、前記カードに関する格納されたシグネチャと比較されて、前記カードの真正性、および不正操作されていない性質が、確認されることが可能である。また、そのようなデバイスは、例えば、軍隊スタイルの金属IDタグ(これらのタグは、アレルギー患者によって、患者のアレルギーについて他の人々に知らせるために、多くの場合、携帯される)を読み取るコンテキストにおいて使用されることも可能である。これにより、患者を治療する医療スタッフが、治療されている患者が、実際に、タグの正しい所持者であることを確実にすることが可能になる。同様に、犠牲者状況において、回収されたタグが、真正性に関して走査されて、家族および/または同僚に知らせる前に、犠牲者が正しく身元確認されていることが確実にされることが可能である。
【0062】
前述の実施例は、小さい断面のコヒーレント光線を使用した局所的励起を、励起の局所領域を含むはるかに大きい領域にわたって散乱する光信号を受け入れる検出器と組み合わせることに基づく。はるかに大きい領域の励起との組合せで、局所的領域からだけの光を収集する方向性検出器に代わりに基づく、機能的に均等の光学系を設計することも可能である。
【0063】
図7Aは、方向性光収集と、コヒーレント光線を使用した全面的照明とに基づくリーダのための、そのようなイメージング構成を概略で示す側面図である。アレイ検出器48が、円柱マイクロレンズアレイ46と組合せで配置され、したがって、検出器アレイ48の隣接するストリップは、読み取りボリュームにおける、対応する隣接するストリップからの光だけを収集する。図2を参照すると、各円柱マイクロレンズが、n個のサンプリングストリップの1つから光信号を収集するように配置される。すると、コヒーレント照明は、読み取りボリューム(図示せず)全体の全面的な照明で行われることが可能である。
【0064】
また、局所的励起と局所的検出の組合せを有する混成システムも、一部のケースにおいて有用である可能性がある。
【0065】
図7Bは、方向性検出器が、細長い光線を使用した局所的照明と組合せで使用されるリーダに関する、そのような混成イメージング構成の光学フットプリントを概略で示す平面図である。この実施例は、方向性検出器が提供される図1の実施例の発展形態と考えることができる。この実施例では、方向性検出器の3つのバンクが、提供され、各バンクは、「l×w」励起ストリップに沿った異なる部分からの光を収集することを目標にする。読み取りボリュームの平面からの収集領域が、点線の円で示されており、したがって、第1検出器バンク、例えば、2は、励起ストリップの上側部分からの光信号を収集し、第2検出器バンクは、励起ストリップの中央部分からの光を収集し、第3検出器バンクは、励起ストリップの下側部分からの光信号を収集する。各検出器バンクは、約l/mの直径の円形収集領域を有するように示される。ただし、mは、励起ストリップの下位区分の数であり、この実施例において、m=3である。このようにして、独立したデータポイントの数が、所与の走査長lに関して、m倍に増加されることが可能である。後段でさらに説明するとおり、異なる方向性検出器バンクの1つまたは複数が、スペックルパターンをサンプリングする光信号を収集すること以外の目的で使用されることが可能である。例えば、バンクの1つを使用して、バーコード走査のために最適化された仕方で光信号が収集されてもよい。これが該当する場合、コントラストだけに関して走査している際、相互相関を得ることに利点はまったく存在しないので、前記バンクは、1つだけの検出器を含むことで、一般に、十分である。
【0066】
以上、様々なリーダ装置の主要な構造的構成要素、および機能的構成要素を説明したので、次に、シグネチャを特定するのに使用される数値処理について説明する。この数値処理は、大部分、PIC30に従属させられた、いくつかの要素を有するPC34上で実行されるコンピュータプログラムにおいて実施されることが可能であることが理解されよう。代替の実施例では、数値処理は、ハードウェアまたはファームウェアの専用の数値処理デバイスまたは数値処理デバイス群によって実行されることが可能である。
【0067】
図8Aは、約0.5×0.2mmの領域に及ぶイメージを有する紙表面の顕微鏡イメージである。この図は、紙などからの、巨視的に平坦な表面が、微視的なスケールにおいて、多くの場合に、非常に構造化されていることを例示するために、含められている。紙の場合、表面は、紙を構成する木繊維または他の繊維の互いに絡み合う網目の結果、微視的に非常に構造化されている。また、この図は、およそ10ミクロンである木繊維に関する特徴的な長さスケールも例示する。この寸法は、回折を生じさせ、したがって、スペックルを生じさせ、さらに、繊維の向きに依存するプロファイルを有する散漫散乱も生じさせる、この実施例のコヒーレントな光線の光波長に対する正しい関係を有する。このため、リーダが、特定のクラスの商品のために設計されるべき場合、レーザの波長は、走査されるべきクラスの商品の構造特徴サイズに合わせられることが可能であることが、認識されよう。また、この図から、各紙の局所表面構造は、個々の木繊維がどのように並んでいるかに、その構造が依存するという点で、一意であることが明白である。このため、紙は、自然の法則によって支配されるプロセスによって作られている結果、一意である構造を有するという点で、先行技術の特殊樹脂トークンまたは磁気材料堆積物などの、特別に作成されたトークンとまったく異ならない。同じことは、他の多くのタイプの物品にも当てはまる。
【0068】
図8Bは、プラスチック表面に関する均等のイメージを示す。この原子間力顕微鏡イメージは、巨視的には平滑なプラスチック表面の不均一な表面を明確に示す。この図から推測することができるとおり、この表面は、図8Aに示される紙表面より平滑であるが、このレベルの表面起伏でさえ、この実施例のシグネチャ生成スキームを使用して一意に識別されることが可能である。
【0069】
つまり、様々な日常的な物品から、一意の特性が、単純明快な仕方で測定可能である時に、特別に加工されたトークンを作成する労力および費用を引き受けるのは、基本的に無意味である。次に、物品の表面(または、透過の場合、内部)の自然な構造を利用する散乱信号のデータ収集および数値処理を説明する。
【0070】
図9Aは、図1のリーダの光検出器16a〜16dの単一の光検出器からの生のデータを示す。グラフは、ポイント数n(図2参照)に対する信号強度Iをa.u.(任意の単位)でプロットする。I=0〜250の間で変動する高い方のトレースは、光検出器16aからの生の信号データである。低い方のトレースは、およそI=50における、マーカ28(図2参照)からピックアップされた符号器信号である。
【0071】
図9Bは、符号器信号で線形化された後の図10Aの光検出器データを示す(x軸は、図10Aとは異なるスケール上にあるものの、このことは重要ではないことに注意されたい)。前述したとおり、スキャナに対する物品の動きが、十分に線形である場合、アラインメントマークに対する線形化を利用する必要はまったくない可能性がある。さらに、強度の平均が、計算され、強度値から引かれている。このため、処理されたデータ値は、0を挟んで上下に変動する。
【0072】
図9Cは、デジタル化の後の図9Bのデータを示す。採用されるデジタル化スキームは、あらゆる正の強度値が、値1に設定され、あらゆる負の強度値が、0に設定される単純なバイナリスキームである。代わりに、多状態デジタル化、または他の多くのデジタル化アプローチの任意のアプローチが使用されることも可能であることが、認識されよう。デジタル化の最も重要な特徴は、単に、同一のデジタル化スキームが、一貫して適用されることである。
【0073】
図10は、物品のシグネチャが、走査からどのように生成されるかを示す流れ図である。
【0074】
ステップS1は、光検出器のそれぞれにおける光強度が、走査の全時間中、およそ1ミリ秒ごとに獲得される、データ獲得ステップである。同時に、符号器信号が、時間に応じて獲得される。走査モータが、高い度合いの線形化精度を有する場合(ステップモータの場合のように)、データの線形化は、要求されない可能性があることに留意されたい。データは、ADC31からのデータを取り込んで、PIC30によって獲得される。データポイントは、PIC30からPC34にリアルタイムで転送される。代替として、データポイントは、PIC30内部のメモリの中に格納され、その後、走査の終了時にPC34に送られることも可能である。各回の走査において収集される検出器チャネル当たりのデータポイントの数nは、以下においてNと定義される。さらに、値ak(i)が、光検出器kからの格納された第i番の強度値と定義され、ただし、iは、1からNまでに及ぶ。そのような走査から得られた2つの生のデータセットの例が、図9Aに示される。
【0075】
ステップS2は、数値補間を使用して、ak(i)の拡大および縮小を局所的に行って、符号器遷移が、時間的に均等に離隔しているようにする。これにより、モータ速度の局所的変動が補正される。このステップは、PC34においてコンピュータプログラムによって実行されることが可能である。
【0076】
ステップS3は、オプションのステップである。実行された場合、このステップは、時間に関してデータを数値的に差別化する。また、弱い平滑化関数をデータに適用することも望ましい可能性がある。差別化は、信号からの互いに関係していない寄与を、互いに関係する(スペックル)寄与に比べて、弱める役割をするので、非常に構造化された表面に関して役立つ可能性がある。
【0077】
ステップS4は、各光検出器に関して、N個のデータポイントにわたる記録された信号の平均値がとられるステップである。各光検出器に関して、この平均値が、データポイントのすべてから引かれて、データが、0の強度を中心に分布しているようにする。線形化が行われ、計算された平均値が引かれた後の走査データセットの例を示す、図9Bを参照する。
【0078】
ステップS5は、アナログの光検出器データをデジタル化して、走査を表すデジタルシグネチャを計算する。デジタルシグネチャは、次の規則を適用することによって得られる。すなわち、ak(i)>0は、バイナリ「1」にマップされ、ak(i)<=0は、バイナリ「0」にマップされる。デジタル化されたデータセットは、dk(i)と定義され、ただし、iは、1からNまでに及ぶ。物品のシグネチャは、説明したばかりの強度データのデジタル化されたシグネチャに加えて、さらなる成分を組み込むことが可能である。次に、これらのさらなるオプションのシグネチャ成分を説明する。
【0079】
ステップS6は、より小さい「サムネイル」デジタルシグネチャが作成されるオプションのステップである。このステップは、m個の読み取り値の隣接するグループを一緒に平均することにより、または、より好ましくは、第c番ごとのデータポイントを選ぶことによって行われ、ただし、cは、サムネイルの圧縮係数である。平均することは、ノイズを不釣合いに増幅するので、第c番ごとのデータポイントを選ぶことの方が好ましい。次に、ステップS5で使用されるのと同一のデジタル化則が、縮小されたデータセットに適用される。サムネイルデジタル化は、tk(i)と定義され、ただし、iは、1からN/cまでに及び、cは、圧縮係数である。
【0080】
ステップS7は、複数の検出器チャネルが存在する場合に適用可能な、オプションのステップである。追加の成分は、異なる光検出器から得られた強度データ間で計算される相互相関成分である。2つのチャネルでは、可能な1つの相互相関係数が存在し、3つのチャネルでは、3つまでの相互相関係数が存在し、4つのチャネルでは、6つまでの相互相関係数が存在するといった具合である。相互相関係数は、材料タイプの良好な標識であることが分かっているので、有用である。例えば、所与のタイプのパスポート、またはレーザプリンタ用紙などの、ある特定のタイプの文書に関して、相互相関係数は、常に、予測可能な範囲内に入るように見受けられる。正規化された相互相関が、ak(i)とal(i)の間で計算されることが可能であり、ただし、k≠lであり、かつk、lは、光検出器チャネル数のすべてにわたって変化する。正規化された相互相関関数Γは、以下のとおり定義される。すなわち、
【0081】
【数1】
【0082】
後の検証において使用するために格納されることが可能な相互相関関数の別の態様は、相互相関関数におけるピークの幅、例えば、FWHM(半値全幅)である。検証処理における相互相関係数の使用については、後段でさらに説明する。
【0083】
ステップS8は、信号強度分布を示す単純な強度平均値を計算することである別のオプションのステップである。この計算は、異なる検出器に関する平均値の各値の全体的な平均であっても、ak(i)のrms(自乗平均)値などの、各検出器に関する平均であってもよい。検出器が、前述したリーダの場合のように、ペアで、垂直入射のいずれの側にも配置される場合、各検出器ペアに関する平均が、使用されてもよい。強度値は、サンプルの全体的な反射率および粗さの単純な示度であるので、材料タイプに関する良好な粗いフィルタとなることが分かっている。例えば、強度値として、平均値、すなわち、DCバックグラウンドを除去した後の、正規化されていないrms値を使用することができる。
【0084】
物品を走査することから得られたシグネチャデータは、検証目的で、シグネチャデータベースの中に保持されるレコードと比較され、かつ/またはデータベースに書き込まれて、シグネチャの新たなレコードが追加されて、既存のデータベースが拡張されることが可能である。
【0085】
新たなデータベースレコードは、ステップS5で獲得されたデジタルシグネチャを含む。このレコードは、オプションとして、各光検出器チャネルに関してステップS6で獲得される、より小さいサムネイルバージョン、ステップS7で獲得される相互相関係数、およびステップS8で獲得される平均値の1つまたは複数によって補足されることが可能である。代替として、サムネイルは、高速検索のために最適化されたサムネイル独自の別個のデータベースに格納され、残りのデータ(サムネイルを含む)が、メインデータベース上に格納されてもよい。
【0086】
図11は、走査から得られた物品のシグネチャが、シグネチャデータベースに照らして、どのように検証されることが可能であるかを示す流れ図である。
【0087】
単純な実施形態では、データベースは、シグネチャデータの完全なセットに基づいて、単に検索されて、合致が見出されることが可能である。しかし、検証プロセスをスピードアップするのに、プロセスは、前述したとおりの、計算された平均値および相互相関係数に基づく、より小さいサムネイル、および事前スクリーニングを使用することができる。
【0088】
検証ステップV1は、検証プロセスの最初のステップであり、このステップは、前述したプロセスに従って物品を走査する。すなわち、走査ステップS1からS8までを実行することである。
【0089】
検証ステップV2は、サムネイルエントリのそれぞれを取り上げ、前記エントリとtk(i+j)との間の合致するビットの数を評価し、ただし、jは、走査される領域の位置付けの誤差を補償するように変えられるビットオフセットである。jの値が、特定され、次に、最大数の合致するビットをもたらすサムネイルエントリが、特定される。このエントリが、さらなる処理のために使用される「ヒット」である。
【0090】
検証ステップV3は、走査されたデジタルシグネチャに照らして、記録のために格納された完全なデジタルシグネチャを解析する前に実行される、オプションの事前スクリーニング試験である。この事前スクリーニングにおいて、走査ステップS8で得られたrms値が、ヒットのデータベースレコードの中の対応する格納された値と比較される。それぞれの平均値が事前定義された範囲内に適合しない場合、この「ヒット」は、さらなる処理から棄却される。すると、前記物品は、検証されないものとして棄却される(すなわち、検証ステップV6にジャンプして、不合格結果を発行する)。
【0091】
検証ステップV4は、完全なデジタルシグネチャを解析する前に実行される、さらなるオプションの事前スクリーニング試験である。この事前スクリーニングにおいて、走査ステップS7で獲得された相互相関係数が、ヒットのデータベースレコードの中の対応する格納された値と比較される。それぞれの相互相関係数が、事前定義された範囲内に適合しない場合、この「ヒット」は、さらなる処理から棄却される。すると、前記物品は、検証されないものとして棄却される(すなわち、検証ステップV6にジャンプして、不合格結果を発行する)。
【0092】
検証ステップV4において実行されることが可能な相互相関係数を使用する別の検査は、相互相関関数におけるピークの幅を検査することであり、ただし、相互相関関数は、以下のとおり、前述の走査ステップS7における最初の走査から格納された値と、再走査された値とを比較することによって評価される。すなわち、
【0093】
【数2】
【0094】
再走査されたピークの幅が、最初の走査の幅より相当に高い場合、そのことは、再走査された物品が、不正操作されている、または、それ以外で疑わしいことを示すものとして解釈されることが可能である。例えば、このチェックは、走査される表面から光検出器によって予期されるのと同一の強度変化を有するバーコード、またはその他のパターンを印刷することにより、システムを騙そうと試みる詐欺師を打ち負かさなければならない。
【0095】
検証ステップV5は、走査ステップS5で獲得された、走査されたデジタルシグネチャと、ヒットのデータベースレコードの中の対応する格納された値との間の主な比較である。格納されたデジタル化された完全なシグネチャ、dkdb(i)が、k個の検出器チャネル上のq個の隣接するビットのn個のブロックに分割され、すなわち、ブロック当たりqk個のビットが、存在する。qの通常の値は、4であり、kの通常の値は、4であり、通常、ブロック当たり16ビットとなる。次に、そのqk個のビットが、格納されたデジタルシグネチャdkdb(i+j)の中の対応するqk個のビットと照合される。前記ブロック内の合致するビットの数が、何らかの事前定義された閾値zthresh以上である場合、合致するブロックの数が、インクリメントされる。zthreshの通常の値は、13である。以上が、n個すべてのブロックに関して繰り返される。このプロセス全体が、jの異なるオフセット値に関して繰り返されて、最大数の合致するブロックが見出されるまで、走査される領域の位置付けの誤差が補償される。Mを、合致するブロックの最大数と定義すると、偶然の合致の確率は、以下を評価することによって計算される。すなわち、
【0096】
【数3】
【0097】
ただし、sは、任意の2つのブロック間の偶然の合致の確率(この確率は、zthreshの選択された値に依存する)であり、Mは、合致するブロックの数であり、p(M)は、M個以上のブロックが偶然に合致する確率である。sの値は、類似した材料の異なる物体の走査、例えば、紙の文書の数回の走査からのデータベース内のブロックを比較することによって決定される。q=4、k=4、およびzthreshold=13の場合、sの通常の値は、0.1である。qk個のビットが、完全に独立である場合、確率理論は、zthreshold=13に関してs=0.01を与える。経験的には、より高い値が見出されるという事実は、k個の検出器チャネルの相互関係のため、および有限のレーザスポット幅に起因するブロック内の隣接するビット間の相互関係のためでもある。紙の通常の走査は、その紙に関するデータベースエントリに照らして比較されると、総数510ブロックのうち約314個の合致するブロックをもたらす。前述の数式に関してM=314、n=510、s=0.1に設定することにより、10-177という偶然の合致の確率がもたらされる。
【0098】
検証ステップV6が、検証プロセスの結果を発行する。検証ステップV5で得られた確率結果が、ベンチマークが事前定義された確率閾値である合格/不合格試験において使用されることが可能である。このケースでは、確率閾値は、システムによってあるレベルに設定されても、ユーザによって選択されたレベルに設定される可変パラメータであってもよい。代替として、確率結果は、確率自体として生の形態で、または相対的な用語(例えば、合致なし/不良な合致/良好な合致/非常によい合致)もしくは他の分類を使用する、変形された形態で、信頼度レベルとしてユーザに出力されることが可能である。
【0099】
多くの変種が可能であることが、認識されよう。例えば、相互相関係数を事前スクリーニング成分として扱う代わりに、相互相関係数が、メインシグネチャの一部として、デジタル化された強度データと一緒に扱われることも可能である。例えば、相互相関係数は、デジタル化されて、デジタル化された強度データに加えられることも可能である。また、相互相関係数は、独自にデジタル化されて、ビットストリングなどを生成するのに使用されることも可能であり、次に、それらのビットストリングなどが、ヒットを見出すためにデジタル化された強度データのサムネイルに関して前述したのと同じ仕方で検索されることも可能である。
【0100】
このように、以上、物品を走査して、その物品の本質的特性に基づくシグネチャを得るための、いくつかの例示的な構成を説明してきた。また、そのシグネチャが、走査中に収集されたデータからどのように生成されることが可能であるか、およびそのシグネチャが、どのように同一の物品、または異なる物品からの後の走査と比較されて、同一の物品が、その後の走査において走査されたもっともらしさはどれぐらいかという測度が提供されることが可能であるかの実施例も説明してきた。
【0101】
そのようなシステムは、多くの応用先を有し、それらの応用先の中には、詐欺防止およびアイテムトレーサビリティのためのアイテムのセキュリティスクリーニングおよび信頼度スクリーニングが含まれる。
【0102】
一部の実施例では、走査された物品からシグネチャを抽出するための方法は、例えば、延伸または収縮によって引き起こされた物品の変形にかかわらず、前記物品の確実な認識を提供するように最適化されることが可能である。物品のそのような延伸および収縮は、例えば、紙ベースの、またはボール紙ベースの物品に対する水害によって引き起こされる可能性がある。
【0103】
また、物品は、スキャナ内部のセンサに対する物品の相対速度が、非線形である場合、スキャナには、延伸されて、または収縮して見える可能性がある。これは、例えば、物品が、コンベアシステムに沿って動かされている場合、または物品が、前記物品を把持する人間によってスキャナを通るように動かされている場合、生じる可能性がある。これが生じる可能性の高いシナリオの例は、人間が、例えば、前述の図6A、図6B、および図6Cに関連して説明したようなスキャナを使用して、銀行カードを走査する場合である。
【0104】
前述したとおり、スキャナが、スキャナユニット内部で、スキャナに対して、またはスキャナ内で静止状態に保たれている物品に対して動くスキャンヘッドに基づく場合、線形化誘導が、オプションの距離マーク28によって提供されて、スキャンヘッドの動きの非線形性に対処することが可能である。物品が、人間によって動かされる場合、これらの非線形性は、大幅に大きくなる可能性がある。
【0105】
これらの非線形効果によって引き起こされる可能性がある認識問題に対処するのに、物品の走査の解析段階を調整することが可能である。このため、次に、変形された検証手続きを、図12を参照して説明する。この実施例において実施されるプロセスは、データのブロックに関する解析を使用して、非線形性に対処する。
【0106】
図12に従って実行されるプロセスは、図10に関連して説明したが、この図の内容を分かりにくくしないように、図12には示されていない、データを平滑化し、差別化するステップ、平均値を計算し、引くステップと、シグネチャおよびサムネイルを獲得するためのデジタル化のステップとのいくつか、またはすべてを含むことが可能である。
【0107】
図12に示されるとおり、ブロックに関する解析を使用する検証走査のための走査プロセスは、物品の走査を実行して、物品の本質的な特性を記述するデータを獲得することにより、ステップS21で始まる。この走査されたデータが、次に、ステップS22で、隣接するブロックに分割される(この分割は、デジタル化、および平滑化/差別化などの前、または後に実行されることが可能である)。一実施例では、64mmという走査長が、8つの等しい長さのブロックに分割される。したがって、各ブロックは、走査された物品の走査された領域のサブセクションを表す。
【0108】
ブロックのそれぞれに関して、ステップS23で、物品が比較されることが意図される格納された各シグネチャに関する均等のブロックに照らして、相互相関が、実行される。この相互相関は、各ブロックに関して1つのサムネイルを用いるサムネイルアプローチを使用して実行されることが可能である。次に、これらの相互相関計算の結果が、解析されて、相互相関ピークのロケーションが識別される。次に、ステップS24で、相互相関ピークの、前記ロケーションが、完全に線形の関係が、物品の最初の走査と後の走査との間で存在するとした場合の、ピークの予期されるロケーションと比較される。
【0109】
この関係は、図13A、図13B、および図13Cで示されるとおり、グラフで表現されることが可能である。図13Aの実施例では、相互相関ピークは、まさに予期されるとおりの場所にあり、したがって、物品に対するスキャンヘッドの動きは、完全に線形であり、物品は、延伸または収縮を経験していない。このため、予期されるピークに対する実際のピーク位置のプロットは、原点を通り、1という勾配を有する直線をもたらす。
【0110】
図13Bの実施例では、相互相関ピークは、予期されるよりも近寄っており、したがって、最良適合の線の勾配は、1より小さい。このため、物品は、最初の走査時の物品の物理的特性と比べて、収縮している。また、最良適合線は、プロットの原点を通らない。このため、物品は、最初の走査時の物品の位置と比べて、スキャンヘッドに対して偏移している。
【0111】
図13Cの実施例では、相互相関ピークは、直線を形成しない。この実施例では、相互相関ピークは、y2関数を表す曲線に近似的に合う。このため、スキャンヘッドに対する物品の動きは、走査中に遅くなっている。また、最良適合曲線は、原点を通らないので、物品は、最初の走査時の物品の位置と比べて偏移していることが明らかである。
【0112】
様々な関数が、相互相関ピークの点のプロットに試験的に合わせられて、最もよく適合する関数が見出されることが可能である。このため、延伸、収縮、位置合わせ不良、加速、減速、および以上の組合せを考慮に入れる曲線が、使用されることが可能である。適切な関数の例には、直線関数、指数関数、三角関数、x2関数、およびx3関数が含まれることが可能である。
【0113】
ステップS25で、最良適合の関数が識別されると、ステップS26で、各相互相関ピークが、前記ピークの予期される位置からどれだけ偏移しているかを表す変化パラメータセットが、算出されることが可能である。次に、ステップS27で、これらの補償パラメータが、走査からのデータに対する収縮、延伸、位置合わせ不良、加速、または減速の効果を実質的に逆にするために、ステップS21で取り込まれた走査からのデータに適用されることが可能である。認識されるとおり、ステップS25で獲得される最良適合関数が、走査データによく合うほど、補償効果は、良好になる。
【0114】
次に、ステップS28で、ステップS22の場合と同様に、補償された走査データが、隣接するブロックに細分される。次に、ステップS29で、これらのブロックが、格納されたシグネチャからのデータのそれぞれのブロックと個々に相互相関させられて、相互相関係数が得られる。今回は、相互相関ピークの大きさが、解析されて、ステップS29において一意性ファクタが算出される。このため、走査された物品が、格納されたシグネチャが作成された際に走査された物品と同一であるかどうかが判定されることが可能である。
【0115】
したがって、以上、走査される物品の物理的変形、およびスキャナに対する物品の動きの非線形性を補償するための方法の実施例を説明してきた。この方法を使用すると、走査される物品は、前記物品の、より早期の走査から得られた、前記物品に関する格納されたシグネチャと照らして検査されて、高い確度レベルで、その後の走査において同一の物品が存在するか否かが判定されることが可能である。その結果、容易に歪められる材料で作られた物品が、確実に認識されることが可能である。また、物品に対するスキャナの動きが、非線形であることが可能なスキャナが、使用されて、動き制御要素を有さない低価格のスキャナの使用が可能にされることも可能である。
【0116】
物品の本質的な特性に基づいて生成されたシグネチャのブロックに関する解析を使用して検出されることが可能な物品の別の特徴が、物品の局所的損傷の特徴である。例えば、そのような技術は、最初の記録走査の後に物品に行われた変更を検出するのに使用されることが可能である。
【0117】
例えば、パスポート、IDカード、および運転免許証などの多くの文書が、保持者の写真を含む。そのような物品の真正性走査が、前記写真の一部分を含む場合、前記写真に行われた改変は、検出される。シグネチャを10のブロックに分割する恣意的な例をとると、それらのブロックの3つが文書上の写真を範囲に含み、残りの7つが背景材料などの、前記文書の別の部分を範囲に含むことが可能である。写真が置き換えられた場合、その文書の後の再走査は、変更がまったく生じていない7つのブロックに関して良好な合致をもたらすものと予期されることが可能であるが、置き換えられた写真は、非常に不良な合致をもたらす。それら3つのブロックが、写真に対応することを知っていることにより、3つすべてが非常に不良な合致をもたらすという事実は、シグネチャ全体にわたる平均スコアにかかわらず、前記文書の検証を自動的に不合格にするのに使用されることが可能である。
【0118】
また、多くの文書は、1名または複数名の個人の書かれた指示、例えば、パスポート、運転免許証、またはIDカードによって身元確認される個人の名前、または銀行口座保持者の名前を含む。また、多くの文書は、保持者または証明者の書かれた署名が加えられる箇所も含む。検証のために、そこから得られたシグネチャのブロックに関する解析を使用することにより、文書上に印刷された、または書かれた名前、または他の重要な語もしくは番号を改変する変更が、検出されることが可能である。改変された印刷または書き込みの位置に対応するブロックは、変更がまったく生じていないブロックよりも、はるかに低い品質の合致をもたらすものと予期されることが可能である。このため、変更された名前もしくは書かれた署名が、検出されることが可能であり、前記文書の全体的な合致が、合格結果を得るだけ十分に高い場合でも、前記文書が、検証試験において不合格にされることが可能である。
【0119】
IDカード300の例が、図300に示される。IDカード300は、印刷された保持者名302、保持者の写真304、保持者の署名306(この署名は、カード上に書かれても、書かれた署名の走査から印刷されても、あるいは電子的にキャプチャされた署名であってもよい)、および印刷されたカード番号308を含む。IDカードの詐欺的な改変から保護するため、カードの本質的な特性に基づいてシグネチャを生成するための走査領域は、それらの要素の1つまたは複数を含むことが可能である。様々な例示的な走査領域に、図15においてマークが付けられて、それらの可能性を例示している。例示的な走査領域321は、印刷された名前302の一部、および写真304の一部を含む。例示的な走査領域322は、印刷された名前の一部を含む。例示的な走査領域323は、署名306の一部を含む。例示的な走査領域324は、カード番号308の一部を含む。
【0120】
走査領域のために選択される領域および要素は、詐欺師が改変しようと試みる可能性が最も高い文書の要素を含め、いくつかの要因に依存することが可能である。例えば、写真を含むいずれの文書に関しても、最も可能性の高い改変標的は、前記写真が保持者を視覚的に特定するので、通常、その写真である。このため、そのような文書に関する走査領域は、有利には、前記写真の一部分を含むように選択されることが可能である。詐欺的な変更を受ける可能性がある別の要素は、ある個人が自身の名前以外の名前を有するふりをすることは容易であるが、別の個人の署名を複製することは、より難しいので、保持者の署名である。したがって、署名された文書に関して、特に、写真を含まない、そのような文書に関して、走査領域は、有利には、文書上の署名の一部分を含むことが可能である。
【0121】
したがって、一般的なケースにおいて、物品の真正性に関する試験は、シグネチャの全体に関する、検証シグネチャとレコードシグネチャとの間の十分に高い品質の合致、およびシグネチャの少なくとも選択されたブロックにわたる十分に高い一致を含むことが可能であることを見て取ることができる。このため、物品の真正性を評価することに重要な領域が、決定的な真正性結果に達するのにクリティカルなものとして選択されることが可能である。
【0122】
一部の実施例では、クリティカルなブロックとして選択されたブロック以外のブロックが、不良な合致結果を示すことが許されてもよい。このため、文書は、クリティカルなブロックが、良好な合致をもたらし、シグネチャが全体として、良好な合致をもたらす限り、いくつかの部分で破れている、またはそれ以外で損傷を受けているにもかかわらず、真性であるとして受け入れられてもよい。
【0123】
このように、以上、物品の局所的損傷を識別するための、および物品の所定の領域に局所的損傷または改変を有する物品を真性ではないとして棄却するためのシステム、方法、および装置の、いくつかの実施例を説明してきた。他の領域における損傷または改変は、無視されて、文書が真性として認識されることを可能にしてもよい。
【0124】
一部のスキャナ装置において、走査される領域がどこで始まり、どこで終わるかを特定することが困難である可能性があることも可能である。前述した実施例のうち、このことは、走査されるべき物品が、スロットの中を通過し、したがって、スキャンヘッドが、意図される走査領域よりも多く、物品を「見る」ことが可能な図6Bの実施例に関して、最も問題である。この困難に対処する1つのアプローチは、走査領域を、物品の端部で始まるものとして定義することである。スキャンヘッドにおいて受け取られるデータは、物品が、それまで自由空間であったところを通過させられると、明確なステップ変化を受けるので、スキャンヘッドにおいて取得されたデータを使用して、スキャンがどこで始まるかが特定されることが可能である。
【0125】
この実施例では、スキャンヘッドは、スキャナへの物品の適用に先立って機能可能である。このため、最初に、スキャンヘッドは、スキャンヘッドの前方の占有されていない空間に対応するデータを受け取る。物品が、スキャンヘッドの前方を通過させられるにつれ、スキャンヘッドによって受け取られるデータは、物品を記述するデータに即時に変化する。このため、このデータを監視して、物品がどこで始まるかが特定されることが可能であり、それに先立つすべてのデータは、破棄されることが可能である。物品最先端を基準とする走査領域の位置および長さが、いくつかの仕方で特定されることが可能である。最も簡単なのは、物品の全長を走査領域として、スキャンヘッドが、自由空間に対応するデータを再び拾い上げることにより、終端が検出されることが可能であるようにすることである。別の方法は、最先端から所定の回数の走査読み取り値で、記録されるデータを開始すること、および/または停止することである。物品が、常に、ほぼ同一の速度でスキャンヘッドを通り過ぎるものと想定すると、これにより、一貫した走査領域がもたらされる。別の代替は、物品上の実際のマークを使用して、走査領域を開始し、停止することであるが、そうすることは、キャプチャされたいずれのデータが、走査領域に対応し、いずれのデータが、破棄されることが可能であるかを特定する、さらなる作業を、データ処理の点で、要求する可能性がある。
【0126】
このように、以上、アイテムを走査して、前記物品の本質的な特性に基づくデータを収集するため、必要な場合、前記物品の損傷、または走査プロセスにおける非線形性を補償するため、および前記物品を、物品の以前の走査に基づく格納されたシグネチャと比較して、両方の走査に関して同一の物品が存在するかどうかを判定するための、いくつかの技術を説明してきた。
【0127】
物品の真正性または素性の検証のために、前述の図1から図14までを参照して説明した識別技術などのバイオメトリック技術を使用する際、バイオメトリック特性に基づくシグネチャの再現性に関して、困難が生じる可能性がある。詳細には、物品が、異なるシグネチャ生成装置、および異なる時刻においてシグネチャ生成プロセスを受ける場合、バイオメトリックシグネチャ生成システムが物品から生成される各シグネチャにおいて、わずかに異なる結果を返す持ち前の傾向と並んで、物品のわずかに異なる部分が、各回に提示されて、確実な検証をより困難にする可能性が、存在する。
【0128】
次に、これらの困難に対処するためのシステム、方法、および装置の実施例を説明する。最初に、図15を参照して、データベース作成のためのマルチスキャンヘッドシグネチャ生成装置について説明する。
【0129】
図15に示されるとおり、リーダユニット100が、リーダユニットの読み取りボリューム102内に提示される物品に関するシグネチャを作成するようにそれぞれ動作可能な2つの光学サブアセンブリ20を含むことが可能である。このため、アイテムが後に照合されて検証されることが可能なアイテムデータベースの中で、アイテムの記録のためのシグネチャを作成するように、走査のために提示されるアイテムは、2回走査されて、もっともらしい位置合わせ誤差の量だけ互いに空間的にオフセットされた2つのシグネチャが作成されることが可能である。このため、識別または真正性検証のためのアイテムの後の走査は、格納された両方のシグネチャと照合されることが可能である。一部の実施例では、前記格納された2つシグネチャのいずれかとの合致を、合致の成功と考えられることが可能である。
【0130】
一部の実施例では、さらなる読み取りヘッドが、使用されることが可能であり、したがって、3つ、4つ、またはそれより多くのシグネチャが、各アイテムに関して作成される。各スキャンヘッドは、意図される走査ロケーションに隣接する位置からのシグネチャをもたらすために、前記他のスキャンヘッドからオフセットされていることが可能である。このため、検証走査上の物品位置合わせ不良に対するより高い堅牢性を、提供することが可能である。
【0131】
スキャンヘッド間のオフセットは、物品の走査される部分の幅、物品全体サイズに対する、走査される領域のサイズ、検証走査中のもっともらしい位置合わせ不良の量、および物品材料などの要因に依存して、選択されることが可能である。
【0132】
このように、以上、物品が照合されて調べられて、前記物品の素性および/または真正性が検証されることが可能なシグネチャデータベースを作成するように、物品を走査するためのシステムを説明してきた。
【0133】
次に、物品データベースの中の複数のシグネチャを提供するための別のシステムの実施例を、図16を参照して説明する。
【0134】
図16に示されるとおり、リーダユニット100'が、単一の光学サブアセンブリ20と、位置合わせ調整ユニット104とを有することができる。使用の際、位置合わせ調整ユニット104は、リーダユニットの読み取りボリューム102に対する光学サブアセンブリ20の位置合わせを変更することができる。このため、読み取りボリュームの中に入れられた物品は、物品に関する複数のシグネチャを作成するように、異なる位置において光学サブアセンブリ20によって複数回、走査されることが可能である。この実施例では、位置合わせ調整ユニット104は、2つの異なるロケーションから読み取るように光学サブアセンブリを調整することができる。このため、識別または真正性検証のためのアイテムの後の走査は、格納された両方のシグネチャと照合されることが可能である。一部の実施例では、その格納された2つシグネチャのいずれかとの合致が、合致の成功と考えられることが可能である。
【0135】
一部の実施例では、さらなる読み取りヘッド位置が、使用されることが可能であり、したがって、3つ、4つ、またはそれより多くのシグネチャが、各アイテムに関して作成される。各走査ヘッド位置は、意図される走査ロケーションに隣接する位置からのシグネチャを提供するために、その他の位置からオフセットされることが可能である。このため、検証走査上の物品位置合わせ不良に対する、より高い堅牢性が、提供されることが可能である。
【0136】
走査ヘッド位置間のオフセットは、物品の走査される部分の幅、物品全体サイズに対する、走査される領域のサイズ、検証走査中のもっともらしい位置合わせ不良の量、および物品材料などの要因に依存して、選択されることが可能である。
【0137】
このように、以上、物品が照合されて調べられて、前記物品の素性および/または真正性が検証されることが可能なシグネチャデータベースを作成するように、物品を走査するためのシステムの別の実施例を説明してきた。
【0138】
記録走査(すなわち、物品が後に照合されて、検証されることが可能な参照シグネチャを作成する物品の走査)のために使用されるスキャナが、複数のスキャンヘッドおよび/または複数のスキャンヘッド位置を使用して、物品に関する複数のシグネチャを作成することができることを説明してきたが、後の検証走査のために同様のシステムを使用することも可能である。
【0139】
例えば、検証において使用するためのスキャナは、複数の検証走査シグネチャが生成されることを可能にする複数の読み取りヘッドを有することが可能である。これらの複数のシグネチャのそれぞれが、記録されたシグネチャのデータベースと比較されることが可能であり、このデータベース自体、記録された各アイテムに関して複数のシグネチャを含むことが可能である。各アイテムに関する、これらの異なるシグネチャは、様々である可能性があるが、これらのシグネチャはすべて、それでも、他のいずれのアイテムに関するいずれのシグネチャとも極めて異なるという事実のため、任意の1つの記録走査シグネチャと、任意の1つの検証走査シグネチャとの間の合致は、アイテムの素性および/または真正性に対する十分な信頼度をもたらすはずである。
【0140】
複数の読み取りヘッド検証スキャナは、前述の図15に関連して説明したのとほぼ同様に構成されることが可能である。同様に、複数の読み取りヘッド位置検証スキャナは、前述の図16に関連して説明したのとほぼ同様に構成されることが可能である。また、記録スキャナと検証スキャナの両方に関して、複合の複数スキャンヘッドのシステムと、スキャンヘッド当たり複数のスキャンヘッド位置を組み合わせて、単一のデバイスにすることができる。
【0141】
前述の実施形態を相当に詳細に説明してきたが、前述の開示を完全に理解すると、多数の変更形態および変形形態が、当業者には明白となろう。添付の特許請求の範囲は、すべてのそのような変更形態および変形形態、ならびに、それらの形態の均等物を包含するものと解釈されることを意図している。
【図面の簡単な説明】
【0142】
【図1】リーダ装置の実施例の概略側面図である。
【図2】図1のリーダ装置の読み取りボリュームが、どのようにサンプリングされるかを示す概略透視図である。
【図3】図1のリーダ装置の機能構成要素の概略ブロック図である。
【図4】図1のリーダ装置の外形を示す透視図である。
【図5】図1のリーダに関する外形の別の例を示す透視図である。
【図6A】代替のリーダ構成の概略断面図である。
【図6B】別の代替のリーダ構成の透視図である。
【図6C】別の代替のリーダ構成の透視図である。
【図7A】方向性光収集および全面的照明に基づくリーダのための代替のイメージング構成を概略で示す側面図である。
【図7B】方向性検出器が、細長い光線を使用した局所的照明と組み合わせて使用されるリーダのためのさらなる代替のイメージング構成の光学フットプリントを概略で示す平面図である。
【図8A】約0.5mm×0.2mmの面積を覆うイメージを有する紙表面の顕微鏡イメージを示す図である。
【図8B】約0.02mm×0.02mmの面積を覆うイメージを有するプラスチック表面の顕微鏡イメージを示す図である。
【図9A】光検出器信号および符号器信号からなる、図1のリーダを使用する単一の光検出器からの生のデータを示す図である。
【図9B】符号器信号で線形化し、振幅を平均した後の図9Aの光検出器データを示す図である。
【図9C】平均レベルに応じたデジタル化の後の図9Bのデータを示す図である。
【図10】物品のシグネチャが、走査からどのように生成されるかを示す流れ図である。
【図11】走査から得られた物品のシグネチャが、シグネチャデータベースに照らして、どのように検証されることが可能であるかを示す流れ図である。
【図12】図11の検証プロセスが、どのように改変されて、走査における理想的でない性質を見込むことが可能かを示す流れ図である。
【図13A】走査から収集された相互相関データの例を示す図である。
【図13B】走査される物品が歪んでいる走査から収集された相互相関データの例を示す図である。
【図13C】走査される物品が、非線形の速度で走査される走査から収集された相互相関データの例を示す図である。
【図14】真正性検証のための物品の概略図である。
【図15】マルチスキャンヘッドスキャナを概略で示す破断透視図である。
【図16】マルチスキャンヘッド位置スキャナを概略で示す破断透視図である。
【符号の説明】
【0143】
1 リーダ装置
10 読み取りアパーチャ
12 筐体
14 レーザ光ソース
15 レーザ光線
16a、16b、16c、16d 検出器
18 レンズ
19 フォトトランジスタ
20 光学サブアセンブリ
22 駆動モータ
300 IDカード
302 保持者名
304 保持者の写真
308 カード番号
322、323、324 走査領域
【特許請求の範囲】
【請求項1】
物品を識別するためのシステムであって、
前記システムは、
物品からのシグネチャを特定するように動作可能なシグネチャ特定ユニットと、
前記特定されたシグネチャを格納されたシグネチャと比較するように動作可能な比較ユニットとを含み、
前記シグネチャ特定ユニットは、
物品を受けるための読み取りボリュームと、
コヒーレント光線を生じさせ、且つ前記読み取りボリューム内の物品の表面の複数の領域上に順次に前記コヒーレント光線を向けるためのソースと、
前記読み取りボリューム内の物品の異なる領域から前記コヒーレントな光線が散乱する際に得られる信号から、異なるデータポイントグループが、前記物品のそれぞれの異なる領域からの散乱と関係する、前記データポイントグループを含むセットを収集するための検出器構成と、
データポイントグループの前記セットから前記物品のシグネチャを特定するためのデータ獲得―処理ユニットとを含み、
前記比較ユニットは、前記特定されたシグネチャを、隣接するデータブロックに分割し、各ブロックと、前記格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するように動作可能であるシステム。
【請求項2】
前記比較ユニットは、各ブロック比較からの比較結果の属性を、前記ブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するようにさらに動作可能であるとともに、前記比較ユニットは、前記特定されたシグネチャを調整するように前記補償値を使用して、前記特定されたシグネチャと前記格納されたシグネチャとの間の類似性結果を判定するようにさらに動作可能である請求項1に記載のシステム。
【請求項3】
前記比較ユニットは、前記補償値を適用して、前記特定されたシグネチャを調整して、前記アクセストークンの損傷、および/または前記特定されたシグネチャの前記特定の際の非線形性を補償するように動作可能である請求項2に記載のシステム。
【請求項4】
前記比較ユニットは、前記補償値を適用して、前記特定されたシグネチャを調整して、前記読み取りボリュームの異なる部分間の関係の非線形性を補償するように動作可能である請求項2に従属する請求項3に記載のシステム。
【請求項5】
前記物品が前記検出器構成に対して移動されることが可能であるように、前記読み取りボリュームが、構成される請求項1から4のいずれか一項に記載のシステム。
【請求項6】
前記検出器構成は、前記読み取りボリュームに対して移動されるように動作可能である請求項1から5のいずれか一項に記載のシステム。
【請求項7】
前記比較ユニットは、前記特定されたシグネチャのブロックと、前記格納されたシグネチャの対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための前記補償値を算出するように動作可能である請求項2から6のいずれか一項に記載のシステム。
【請求項8】
前記比較ユニットは、前記ブロック比較のそれぞれに関する前記相互相関ピークロケーションに対する最良適合の関数を推定することによって、前記補償値を算出するように動作可能であり、最良適合の前記関数は、前記予期される相互相関ピークロケーションからの平均偏差を表す請求項7に記載のシステム。
【請求項9】
最良適合の前記関数は、直線関数、指数関数、三角関数、およびx2関数のいずれかである請求項8に記載のシステム。
【請求項10】
前記特定されたシグネチャを、複数の格納されたシグネチャと比較するように動作可能である請求項1から9のいずれか一項に記載のシステム。
【請求項11】
前記特定されたシグネチャと、前記複数の格納されたシグネチャとの間の最も近い合致結果を見出すように動作可能である請求項10に記載のシステム。
【請求項12】
前記特定されたシグネチャが、前記格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定した場合、合致なしの結果を返すように動作可能である請求項9または10に記載のシステム。
【請求項13】
前記比較ユニットは、比較される各ブロックに関する類似性結果を計算するように動作可能である請求項1から12のいずれか一項に記載のシステム。
【請求項14】
前記比較ユニットは、少なくとも1つの所定のブロックに関する前記類似性結果を、所定の類似性閾値と比較するように動作可能である請求項13に記載のシステム。
【請求項15】
前記少なくとも1つの所定のブロックに関する前記類似性結果が、所定の類似性閾値を下回っていた場合、比較ユニットは、前記シグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すように動作可能である請求項14に記載のシステム。
【請求項16】
物品識別方法であって、
物品からのシグネチャを特定するステップと、
前記特定されたシグネチャを格納されたシグネチャと比較するステップと、
前記特定されたシグネチャを、隣接するデータブロックに分割するステップと、
各ブロックと、前記格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するステップとを含み、
前記シグネチャを特定するステップは、
読み取りボリューム内の物品の表面の複数の領域上に順次にコヒーレント光線を向けるステップと、
前記物品の本質的構造から前記コヒーレントな光線が散乱する際に得られる信号から、異なるデータポイントグループが、前記物品のそれぞれの異なる領域からの散乱と関係する、データポイントグループを含むデータポイントセットを収集するステップと、
前記データポイントセットから前記物品のシグネチャを特定するステップとを含む物品識別方法。
【請求項17】
各ブロック比較からの比較結果の属性を、前記ブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するステップと、
前記特定されたシグネチャを調整するように前記補償値を使用して、前記特定されたシグネチャと前記格納されたシグネチャとの間の類似性結果を判定するステップとをさらに含む請求項16に記載の方法。
【請求項18】
前記補償値を適用して、前記特定されたシグネチャを調整して、前記物品の損傷、および/または前記特定されたシグネチャの前記特定の際の非線形性を補償するステップをさらに含む請求項17に記載の方法。
【請求項19】
前記補償値を適用して、前記特定されたシグネチャを調整して、前記物品の異なる部分間の関係の非線形性を補償するステップを含む請求項18に記載の方法。
【請求項20】
前記データポイントセットを収集するステップは、前記物品を検出器に対して動かすステップを含む請求項16から19のいずれか一項に記載の方法。
【請求項21】
前記データポイントセットを収集するステップは、検出器構成を前記物品に対して動かすステップを含む請求項16から19のいずれか一項に記載の方法。
【請求項22】
各ブロック比較からの比較結果の属性を前記ブロック比較の予期される属性と前記比較するステップは、前記特定されたシグネチャのブロックと前記格納されたシグネチャの前記対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための前記補償値を算出するステップを含む請求項17から21のいずれか一項に記載の方法。
【請求項23】
前記補償値を前記算出するステップは、前記ブロック比較のそれぞれに関する前記相互相関ピークロケーションに対する最良適合の関数を推定するステップを含み、最良適合の前記関数は、前記予期される相互相関ピークロケーションからの平均偏差を表す請求項22に記載の方法。
【請求項24】
最良適合の前記関数は、直線関数、指数関数、三角関数、およびx2関数のいずれかである請求項23に記載の方法。
【請求項25】
前記特定されたシグネチャを、複数の格納されたシグネチャと比較するステップを含む請求項16から24のいずれか一項に記載の方法。
【請求項26】
前記特定されたシグネチャと、前記複数の格納されたシグネチャとの間の最も近い合致を見出すステップをさらに含む請求項25に記載の方法。
【請求項27】
前記特定されたシグネチャが、前記格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定された場合、合致なしの結果を返すステップをさらに含む請求項25または26に記載の方法。
【請求項28】
比較される各ブロックに関する類似性結果を計算するステップをさらに含む請求項16から27のいずれか一項に記載の方法。
【請求項29】
少なくとも1つの所定のブロックに関する前記類似性結果を、所定の類似性閾値と比較するステップをさらに含む請求項28に記載の方法。
【請求項30】
前記少なくとも1つの所定のブロックに関する前記類似性結果が、所定の類似性閾値を下回っていた場合、前記シグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すステップをさらに含む請求項29に記載の方法。
【請求項31】
実質的に本明細書で説明したとおりの物品識別システム。
【請求項32】
実質的に本明細書で説明したとおりの物品識別の方法。
【請求項1】
物品を識別するためのシステムであって、
前記システムは、
物品からのシグネチャを特定するように動作可能なシグネチャ特定ユニットと、
前記特定されたシグネチャを格納されたシグネチャと比較するように動作可能な比較ユニットとを含み、
前記シグネチャ特定ユニットは、
物品を受けるための読み取りボリュームと、
コヒーレント光線を生じさせ、且つ前記読み取りボリューム内の物品の表面の複数の領域上に順次に前記コヒーレント光線を向けるためのソースと、
前記読み取りボリューム内の物品の異なる領域から前記コヒーレントな光線が散乱する際に得られる信号から、異なるデータポイントグループが、前記物品のそれぞれの異なる領域からの散乱と関係する、前記データポイントグループを含むセットを収集するための検出器構成と、
データポイントグループの前記セットから前記物品のシグネチャを特定するためのデータ獲得―処理ユニットとを含み、
前記比較ユニットは、前記特定されたシグネチャを、隣接するデータブロックに分割し、各ブロックと、前記格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するように動作可能であるシステム。
【請求項2】
前記比較ユニットは、各ブロック比較からの比較結果の属性を、前記ブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するようにさらに動作可能であるとともに、前記比較ユニットは、前記特定されたシグネチャを調整するように前記補償値を使用して、前記特定されたシグネチャと前記格納されたシグネチャとの間の類似性結果を判定するようにさらに動作可能である請求項1に記載のシステム。
【請求項3】
前記比較ユニットは、前記補償値を適用して、前記特定されたシグネチャを調整して、前記アクセストークンの損傷、および/または前記特定されたシグネチャの前記特定の際の非線形性を補償するように動作可能である請求項2に記載のシステム。
【請求項4】
前記比較ユニットは、前記補償値を適用して、前記特定されたシグネチャを調整して、前記読み取りボリュームの異なる部分間の関係の非線形性を補償するように動作可能である請求項2に従属する請求項3に記載のシステム。
【請求項5】
前記物品が前記検出器構成に対して移動されることが可能であるように、前記読み取りボリュームが、構成される請求項1から4のいずれか一項に記載のシステム。
【請求項6】
前記検出器構成は、前記読み取りボリュームに対して移動されるように動作可能である請求項1から5のいずれか一項に記載のシステム。
【請求項7】
前記比較ユニットは、前記特定されたシグネチャのブロックと、前記格納されたシグネチャの対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための前記補償値を算出するように動作可能である請求項2から6のいずれか一項に記載のシステム。
【請求項8】
前記比較ユニットは、前記ブロック比較のそれぞれに関する前記相互相関ピークロケーションに対する最良適合の関数を推定することによって、前記補償値を算出するように動作可能であり、最良適合の前記関数は、前記予期される相互相関ピークロケーションからの平均偏差を表す請求項7に記載のシステム。
【請求項9】
最良適合の前記関数は、直線関数、指数関数、三角関数、およびx2関数のいずれかである請求項8に記載のシステム。
【請求項10】
前記特定されたシグネチャを、複数の格納されたシグネチャと比較するように動作可能である請求項1から9のいずれか一項に記載のシステム。
【請求項11】
前記特定されたシグネチャと、前記複数の格納されたシグネチャとの間の最も近い合致結果を見出すように動作可能である請求項10に記載のシステム。
【請求項12】
前記特定されたシグネチャが、前記格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定した場合、合致なしの結果を返すように動作可能である請求項9または10に記載のシステム。
【請求項13】
前記比較ユニットは、比較される各ブロックに関する類似性結果を計算するように動作可能である請求項1から12のいずれか一項に記載のシステム。
【請求項14】
前記比較ユニットは、少なくとも1つの所定のブロックに関する前記類似性結果を、所定の類似性閾値と比較するように動作可能である請求項13に記載のシステム。
【請求項15】
前記少なくとも1つの所定のブロックに関する前記類似性結果が、所定の類似性閾値を下回っていた場合、比較ユニットは、前記シグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すように動作可能である請求項14に記載のシステム。
【請求項16】
物品識別方法であって、
物品からのシグネチャを特定するステップと、
前記特定されたシグネチャを格納されたシグネチャと比較するステップと、
前記特定されたシグネチャを、隣接するデータブロックに分割するステップと、
各ブロックと、前記格納されたシグネチャのそれぞれのブロックとの間で比較動作を実行するステップとを含み、
前記シグネチャを特定するステップは、
読み取りボリューム内の物品の表面の複数の領域上に順次にコヒーレント光線を向けるステップと、
前記物品の本質的構造から前記コヒーレントな光線が散乱する際に得られる信号から、異なるデータポイントグループが、前記物品のそれぞれの異なる領域からの散乱と関係する、データポイントグループを含むデータポイントセットを収集するステップと、
前記データポイントセットから前記物品のシグネチャを特定するステップとを含む物品識別方法。
【請求項17】
各ブロック比較からの比較結果の属性を、前記ブロック比較の予期される属性と比較して、比較結果を判定する際に使用するための補償値を算出するステップと、
前記特定されたシグネチャを調整するように前記補償値を使用して、前記特定されたシグネチャと前記格納されたシグネチャとの間の類似性結果を判定するステップとをさらに含む請求項16に記載の方法。
【請求項18】
前記補償値を適用して、前記特定されたシグネチャを調整して、前記物品の損傷、および/または前記特定されたシグネチャの前記特定の際の非線形性を補償するステップをさらに含む請求項17に記載の方法。
【請求項19】
前記補償値を適用して、前記特定されたシグネチャを調整して、前記物品の異なる部分間の関係の非線形性を補償するステップを含む請求項18に記載の方法。
【請求項20】
前記データポイントセットを収集するステップは、前記物品を検出器に対して動かすステップを含む請求項16から19のいずれか一項に記載の方法。
【請求項21】
前記データポイントセットを収集するステップは、検出器構成を前記物品に対して動かすステップを含む請求項16から19のいずれか一項に記載の方法。
【請求項22】
各ブロック比較からの比較結果の属性を前記ブロック比較の予期される属性と前記比較するステップは、前記特定されたシグネチャのブロックと前記格納されたシグネチャの前記対応するブロックとの間の比較結果の実際の相互相関ピークロケーションを、予期される相互相関ピークロケーションと比較して、比較結果を判定する際に使用するための前記補償値を算出するステップを含む請求項17から21のいずれか一項に記載の方法。
【請求項23】
前記補償値を前記算出するステップは、前記ブロック比較のそれぞれに関する前記相互相関ピークロケーションに対する最良適合の関数を推定するステップを含み、最良適合の前記関数は、前記予期される相互相関ピークロケーションからの平均偏差を表す請求項22に記載の方法。
【請求項24】
最良適合の前記関数は、直線関数、指数関数、三角関数、およびx2関数のいずれかである請求項23に記載の方法。
【請求項25】
前記特定されたシグネチャを、複数の格納されたシグネチャと比較するステップを含む請求項16から24のいずれか一項に記載の方法。
【請求項26】
前記特定されたシグネチャと、前記複数の格納されたシグネチャとの間の最も近い合致を見出すステップをさらに含む請求項25に記載の方法。
【請求項27】
前記特定されたシグネチャが、前記格納されたシグネチャのそれぞれに関して、所定の閾値より低い類似性結果を判定された場合、合致なしの結果を返すステップをさらに含む請求項25または26に記載の方法。
【請求項28】
比較される各ブロックに関する類似性結果を計算するステップをさらに含む請求項16から27のいずれか一項に記載の方法。
【請求項29】
少なくとも1つの所定のブロックに関する前記類似性結果を、所定の類似性閾値と比較するステップをさらに含む請求項28に記載の方法。
【請求項30】
前記少なくとも1つの所定のブロックに関する前記類似性結果が、所定の類似性閾値を下回っていた場合、前記シグネチャ全体に関する類似性結果にかかわらず、否定的比較結果を返すステップをさらに含む請求項29に記載の方法。
【請求項31】
実質的に本明細書で説明したとおりの物品識別システム。
【請求項32】
実質的に本明細書で説明したとおりの物品識別の方法。
【図1】

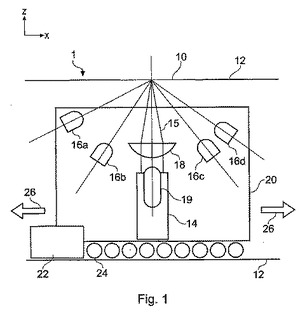
【図2】
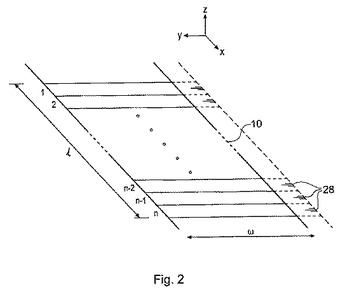
【図3】
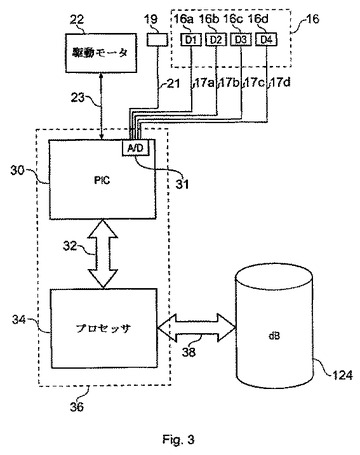
【図4】
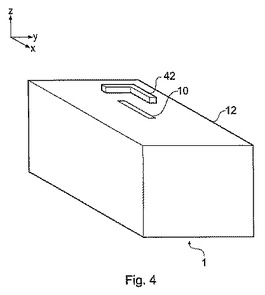
【図5】
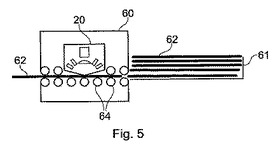
【図6A】
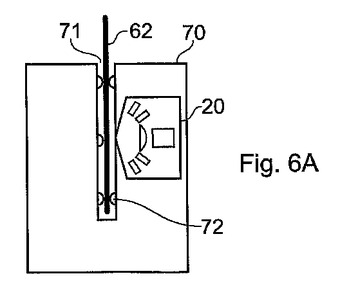
【図6B】
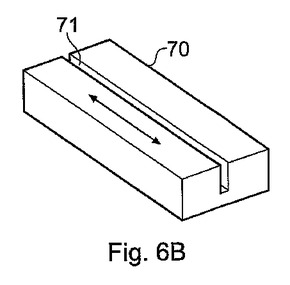
【図6C】
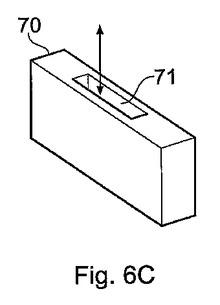
【図7A】
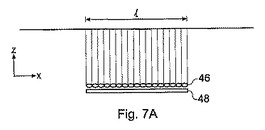
【図7B】
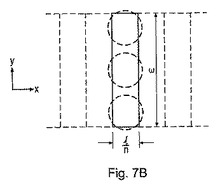
【図8A】
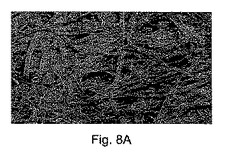
【図8B】
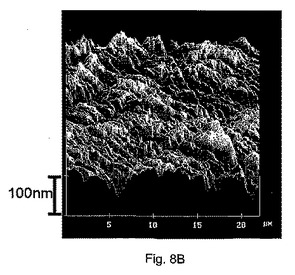
【図9A】
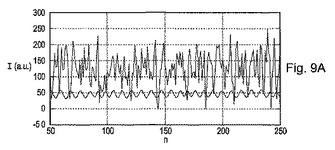
【図9B】
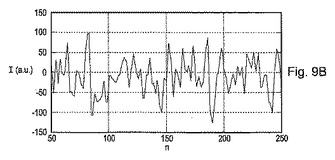
【図9C】
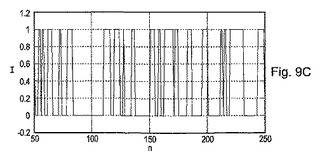
【図10】
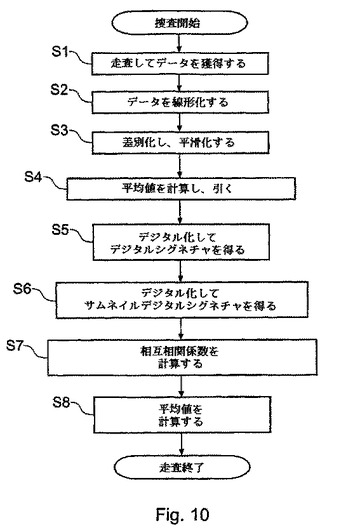
【図11】
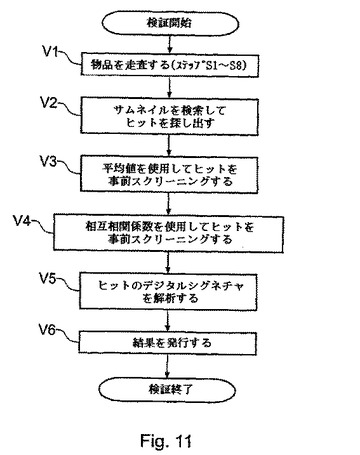
【図12】
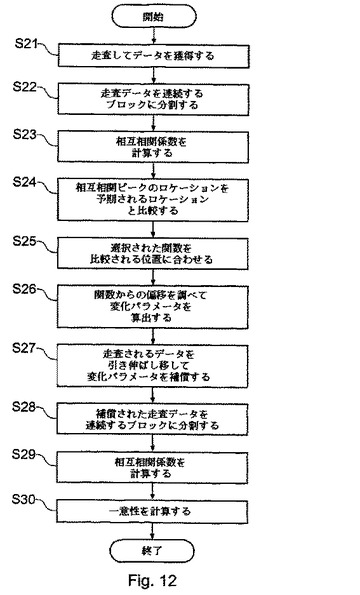
【図13A】
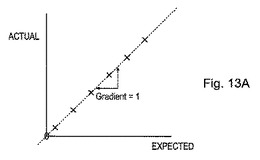
【図13B】
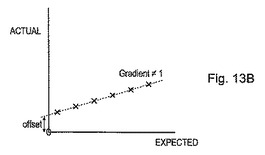
【図13C】
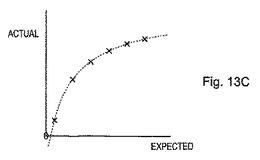
【図14】
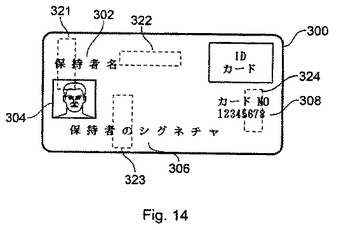
【図15】
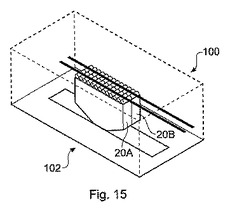
【図16】
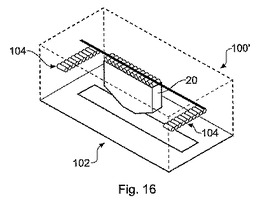
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図9C】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図14】
【図15】
【図16】
【公表番号】特表2009−503671(P2009−503671A)
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願番号】特願2008−523436(P2008−523436)
【出願日】平成18年7月19日(2006.7.19)
【国際出願番号】PCT/GB2006/002689
【国際公開番号】WO2007/012816
【国際公開日】平成19年2月1日(2007.2.1)
【出願人】(505086679)インゲニア・テクノロジー・リミテッド (16)
【Fターム(参考)】
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願日】平成18年7月19日(2006.7.19)
【国際出願番号】PCT/GB2006/002689
【国際公開番号】WO2007/012816
【国際公開日】平成19年2月1日(2007.2.1)
【出願人】(505086679)インゲニア・テクノロジー・リミテッド (16)
【Fターム(参考)】
[ Back to top ]