
真空内処理装置
【課題】トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置を実現する。
【解決手段】測長に使用する一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち上記一対の干渉計および反射体によって測長が行われる方向とは交差する移動軸と平行な方向に対して、上記一対の干渉計および反射体が互いに対向する状態を保ったまま移動できるようにステージを構成する。
【解決手段】測長に使用する一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち上記一対の干渉計および反射体によって測長が行われる方向とは交差する移動軸と平行な方向に対して、上記一対の干渉計および反射体が互いに対向する状態を保ったまま移動できるようにステージを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、真空内処理装置、特に試料の観察を行う走査電子顕微鏡、およびイオンビーム加工を行う荷電粒子線装置に関するものである。
【背景技術】
【0002】
近年、半導体製品の集積度は益々の向上が求められており、その回路パターンは更に高精細化してきている。精細なパターンの製造、及び検査を行うためには、ウエハを正確に所望な位置に移動する必要がある。ウェハが所望な位置に移動したかを確認する手段として、一般的にレーザ測長器が採用されている。
【0003】
レーザ測長器は、レーザヘッドより照射された直交する2種類の偏向されたレーザ光を干渉計内にて分離し、一方を基準光として干渉計内に反射させて、もう一方を測定光として被測定物となる反射鏡に反射させた後、再び干渉計内に取り込み、基準光と重ねて干渉光を発生させる。干渉光はフォトディテクター(以下、レシーバと呼ぶ)により電気信号に変換され、レーザ基板にて位置情報へ変換される。反射鏡と干渉計との相対変化により干渉光は変化するため、その変化をレーザ基板内のカウンタにて加算・減算することで位置管理がなされる。
【0004】
レーザ測長器を使用する検査装置は、荷電粒子線を照射しウエハ上の回路パターンの寸法精度を測定する走査型電子顕微鏡(以下、測長SEMと呼ぶ)、荷電粒子線を照射しウエハ上の回路パターンの欠陥、或いは付着異物を評価する走査型電子顕微鏡(以下、レビューSEMと呼ぶ)などが挙げられる。
【0005】
近年のレビューSEMは、多機能化が進み、本来の荷電粒子線による異物の観察機構だけでなく、光学顕微鏡による異物の検出・観察機構、表面電位計によるウエハの帯電状況計測機構なども付加されてきている。試料となるウエハを移動するトップテーブルは、これら各機構を中心としてウエハ直径分の距離を確保できる範囲を移動する必要がある。つまり、多機能化によりステージの移動範囲(ステージストローク)は広がる傾向にある。これに加えて、量産コストの低下を図るべく、従来まで主流だったΦ300mmウエハに代えて、Φ450mmウエハの導入も検討されており、更なるステージストロークの増加が要求されている。
【0006】
ステージストロークが増大すると、試料室が大型化するため、コストが増加する。また、ステージ移動時間も増加するため、半導体製品のスループットが低下し、やはりコストが増加する。ステージ移動時間を減少させるためには、ステージ移動速度や加速度を上げる必要があり、そのためには試料を載せるトップテーブル質量は出来る限り軽減させなければならない。
【0007】
図11は、光学顕微鏡を搭載したレビューSEM装置の従来例を示す図である。レーザヘッド40からのレーザ光は、ビームスプリッタ41により分離され、干渉計23Xと23Yに入射した後、反射鏡の役目となるバーミラー22で反射され、再度干渉計23Xと23Yに入射する。この状態でトップテーブルが移動すると、ドップラー効果による干渉光が発生する。この干渉光をレシーバ42で検出し、レーザユニット75で電気信号に変換することで、トップテーブル21Aの位置管理を行う。図11のように、一般的には、長く重いバーミラー22がトップテーブル21Aに設置されるため、トップテーブル21Aは重量化する。また、トップテーブル21Aはバーミラーにより実質的に大型化し、これによりトップテーブル21Aの移動範囲を包含する試料室2も大型化する。
【0008】
特許文献1では、重いバーミラーをトップテーブルから除去するかわりに軽い干渉計を配置し、逆に試料室内のベース上にバーミラーを固定配置する構造が提案されている。これにより、トップテーブル質量を軽量化でき、加速度を上げつつ、振動等のステージ特性劣化要因を抑える効果が得られる。また、トップテーブルを小型化できるので、試料室を小型化できる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平4−351905
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、特許文献1に開示されるステージでは、バーミラー自体はやはり真空試料室内に配置されるものであり、かつトップテーブルの移動ストローク程度の長さを確保する必要がある。従って、トップテーブルの小型化という点では効果があるが、真空試料室自体の小型化に対しては余り効果がない。
【0011】
本発明は、このような状況に鑑みてなされたものであり、トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ、バーミラーのような長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置を実現することを目的とする。
【課題を解決するための手段】
【0012】
真空内処理装置内に配置されるステージは、移動方向に応じた移動軸を有する。例えば、XYステージの場合は、互いに直交するX軸およびY軸2つの移動軸を持ち、試料台や試料固着装置など各種の構造物が載置されるトップテーブルは、2つの移動軸各々に沿って移動可能である。XYステージの場合、原理的には、2つの移動軸が交差さえしていれば、XY面内方向での任意位置へのステージ移動が可能である。
【0013】
さて、従来技術の問題は、干渉計と当該干渉計に光を反射させる反射体の一方または両者が固定であるという点に起因する。例えば、特許文献1に開示される構造のステージでは、X方向またはY方向の移動軸に沿った方向に干渉計および反射体が一対ずつ配置された構成を有している。ステージは一方の移動軸と交差する方向に対しても移動できるように構成されているが、反射体は固定されている。そのため、反射体には上記交差方向に対する移動ストローク分の長さが必要となる。
【0014】
そこで本発明は、測長に使用される一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち、測長が行われる干渉計および反射体の組がなす方向(あるいは当該方向と平行な方向)とは交差する移動軸(あるいは当該移動軸に平行な方向)に沿って、上記干渉計および反射体の組が互いに対向する位置関係を保ったまま移動できるようにステージを構成することにより、上記課題を解決する。
【発明の効果】
【0015】
本発明によれば、トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置が実現される。荷電粒子線装置においては、装置容積のうち真空試料室がかなりの部分を占めるので、真空試料室が小型化されることにより、設置スペースが少ない荷電粒子線装置を実現することができる。ひいては、真空排気に要する時間も少なく、荷電粒子光学カラムや真空試料室内を高真空に維持可能で、試料汚染や放電の少ない荷電粒子線装置を実現することができる。
【図面の簡単な説明】
【0016】
【図1】本発明のレビューSEMを示す説明図
【図2】本発明のステージ、及びレーザ測長器構成を示す平面図
【図3】本発明のステージ、及びレーザ測長器構成を示す側面図
【図4】本発明のステージ、及びレーザ測長器の各寸法を示す平面図
【図5】本発明のステージ、及びレーザ測長器構成を示す平面図
【図6】本発明のステージ、及びレーザ測長器構成を示す側面図
【図7】試料室へのバーミラーの固定方法を示す断面図
【図8】ステージ移動時のSEM中心と干渉計測定軸とのずれを示す平面図
【図9】本発明のステージ、及びレーザ測長器構成を示す平面図
【図10】本発明のステージ、及びレーザ測長器構成を示す平面図
【図11】従来のステージ、及びレーザ測長器構成を示す平面図
【図12】従来のステージ、及びレーザ測長器構成を示す平面図
【発明を実施するための形態】
【0017】
本発明は、真空内処理装置、特に試料の観察を行う走査電子顕微鏡、およびイオンビーム加工を行う荷電粒子線装置に関するものである。
【0018】
以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は本発明を実現するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成については同一の参照番号が付されている。
【0019】
本実施形態では、真空内処理装置のうちレビューSEMなどの荷電粒子線装置を例に説明するが、レビューSEMに限ることなく、真空中でレーザ測長器を使用する装置であれば同様の効果が期待できる。
【0020】
<第1の実施形態>
はじめに、本発明の第1の実施形態について、図1ないし図4を参照しつつ説明する。
【0021】
(レビューSEMの装置構成)
図1は、本実施形態のレビューSEMの概略構成図である。床に設置される架台6には、床振動を除振するマウント4が取付けられており、更にマウント4は試料室2を支持している。試料室2には、電子線を生成・制御する光学カラム1、試料を搬送する搬送ロボット31が内包されるロードロック3が取付けられている。試料室2は真空ポンプ5により常時真空排気されており、光学カラム1内も図示しない真空ポンプにより高真空度に保たれている。一方、ロードロック3には、大気との隔離を行う大気側ゲートバルブ33、試料室2との隔離を行う真空側ゲートバルブ32が取付けられている。
【0022】
ステージ21には、ウエハ10を静電吸着する静電チャック24、ステージ21の相対的な距離変化をレーザ測長によって把握するための干渉計23及び反射鏡26、が取り付けられている。ステージ21の位置管理は、ステージの位置情報を生成する位置制御部71、ステージ駆動を行うステージ制御部72、により行う。ステージ制御部72では現在の位置情報と目的座標との偏差が無くなるようにフィードバック制御を行っている。フィードバック制御には単純な位置フィードバックのみで行う制御や、ステージの速度情報、ステージ位置偏差の積分情報を加えて応答速度と位置決め精度を向上させるPID制御などが考えられる。
【0023】
光学カラム1には、電子銃11により発生した電子線12を収束させる電子レンズ13、及び電子レンズ16、所望の軌道に偏向させる偏向器14、電子線の照射により試料10から発生する反射電子、或いは2次電子を検出する検出器15、が取り付けられている。ウエハ10の画像は、偏向器14の制御情報と得られた検出器15からの情報を基に画像制御部73により生成され、モニタ74により表示される。
【0024】
試料室2の上方には、試料の高さ検出を行う光学式のZセンサ25が取付けられており、常時ウエハの高さをモニタ可能であり、Zセンサ25から得られた信号は位置制御部71で位置変換された後、カラム制御部に伝達される。この信号によりカラム制御部は電子レンズの光学条件を変更し、試料の高さが変化してもフォーカスがずれないよう処理している。
【0025】
前述したステージ位置情報は光学カラム1の制御を行うカラム制御部70にも伝達され、偏向器14が生成する電子線の偏向制御信号を補正する。偏向器14は、ウエハ位置に電子線の偏向中心を位置決めする位置偏向器14A、撮像するために荷電粒子線を高速で目的視野内を走査する走査偏向器14B、に分かれており、これらの偏向器の制御は偏向制御部17によって各々制御される。例えば、ステージの現在位置が目標座標より偏向範囲内(例えば10μm以内)にずれていた場合、その偏差を位置制御部71からカラム制御部70に伝達し、偏差が無い状態の偏向指令値に偏差分を補正量として加える。上記一連の動作により、ウエハが正確に画像中心となるように位置決めすることができる。
【0026】
(レーザ測長器の構成および動作)
次に、本実施形態のレーザ測長器構成および動作について、図2、及び図3を参照しつつ詳細に説明する。
【0027】
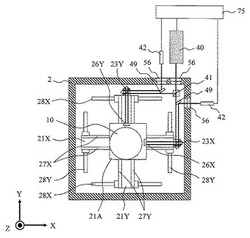
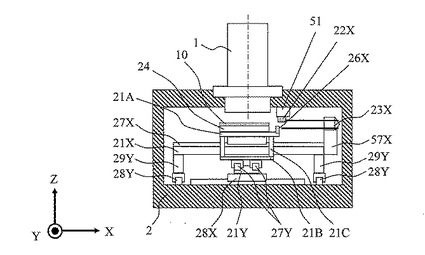
図2は、本実施形態のステージ、及びレーザ測長器構成を示す平面図であり、図3は、本実施形態のステージ、及びレーザ測長器構成を示す側面図である。
【0028】
本実施形態では、トップテーブル21Aには、X反射鏡26XとY反射鏡26Yが実装され、Xスライダ21XとYスライダ21Yには、それぞれX干渉計23XとY干渉計23Yが実装されていることを特徴とする。以下、詳細に説明する。
【0029】
X干渉計23XとY干渉計23Yは、X取付け台57Xと、図示しないY取付け台を介して、Xスライダ21X及びYスライダ21Yの一方の端部に取付けられている。Xスライダ21XおよびYスライダ21Yは、各々、X方向の移動軸およびY方向の移動軸に沿ってX方向ないしY方向に移動することが可能である。この移動軸は、仮想的なものである場合もあれば、スライダの移動のために使用される何らかの物理的な軸部材である場合もある。よって、X干渉計23Xは、Xスライダ21Xと共にY方向に移動し、Y干渉計23Yは、Yスライダ21Yと共にX方向に移動することとなる。
【0030】
Xスライダ21Xは、両端に連結されるY取付けスペーサ29YによってYガイド28Yに取り付けられ、Yガイド28YによってY方向に案内される。ここで、案内とは、特定の方向のみに移動を可能として、その他の方向には移動しない動作を意味する。一方、Yスライダ21Yは、両端に連結されるX取付けスペーサ29XによってXガイド28Xに取り付けられ、Xガイド28XによってX方向に案内される。前述のように、X干渉計23XとY干渉計23Yは、Xスライダ21XまたはYスライダ21Yの一方の端部に取付けられている。従って、Xスライダ21XまたはYスライダ21Yが、Yガイド28YまたはXガイド28Xに沿って、それぞれY方向ないしX方向に移動すれば、X干渉計23XまたはY干渉計23Yも、Yガイド28YまたはXガイド28Xに沿って、Y方向ないしX方向に移動することになる。Xガイド28XまたはYガイド28Yの移動軸が、Xスライダ21XまたはYスライダ21Yの移動軸と平行であることは図から明らかである。
【0031】
更にまた、トップテーブル21Aは、Xスライダ21X上のXスライダガイド27Xと連結され、トップテーブル21Aは、Yスライダ21Y上のYスライダガイド27Yと、連結ベース21B及び連結柱21Cによって連結される。よって、トップテーブル21Aもまた、Xスライダ21Xの移動軸またはYスライダ21Yの移動軸に沿って、XY水平面内を移動可能となる。
【0032】
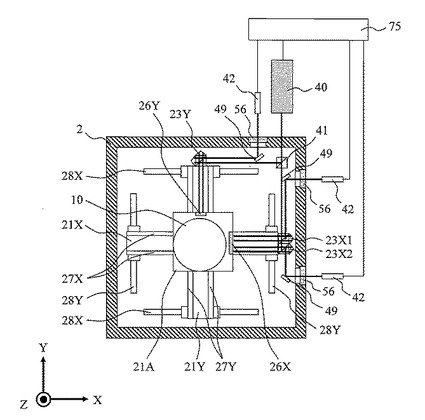
以上の構成を採用した場合の光学経路について説明する。まず、図2において、レーザヘッド40から照射されるレーザ光は、透過窓56を通過し、試料室2に導入される。その後、ビームスプリッタ41にて2経路に分割され、各々X干渉計23XとY干渉計23Yに導入される。X干渉計23XとY干渉計23Yに導入されたレーザ光は、トップテーブル21Aに実装されたX反射鏡26XとY反射鏡26Yにより反射され、再びX干渉計23XとY干渉計23Yに導入される。X干渉計23XとY干渉計23Yで干渉したレーザ光は、ミラー49により曲げられ、各々透過窓56を通過して、レシーバ42に入射する。ここで、干渉光が電気信号に変換された後、レーザユニット75へと伝達されて、位置情報と変換される。なお、本実施形態では、ダブルパス方式を想定しているため、干渉計と反射鏡間は2本のレーザ光が記載されているが、反射鏡をコーナキューブに変更し、干渉計をシングルパス用に変更することでも、シングルパスレーザ測長系として問題なく動作可能となる。
【0033】
さて、図2に示される通り、X干渉計23XとX反射鏡26XおよびY干渉計23YとY反射鏡26Yとは、各々光学経路を構成しており、これらの光学経路はいずれもXスライダ21XおよびYスライダ21Y上に存在する。前述の通り、反射体はトップテーブル上に取付けられており、かつ干渉計はXスライダ21XまたはYスライダ21Yの一方の端部に固定されている。Xスライダ21XまたはYスライダ21Yは、Yガイド28YまたはXガイド28X沿ってそれぞれ移動可能である。
【0034】
このような構成を採用することで、X、Yそれぞれの干渉計と反射体の組は、互いに対向する位置関係を保ったまま、スライダまたはガイドの移動軸に沿って移動することが可能となる。従って、トップテーブルがどのように動いても、光学経路は干渉計と反射体との間から外れることがない。よって、従来必要だった長尺のバーミラーは不要で真空試料室のサイズを小型化でき、かつ従来と変わらない測長機能を実現することができる。すなわち、トップテーブル21AがX方向へ移動すれば、X反射鏡26XとX干渉計23Xによって干渉光が検出される。Y方向へ移動すればY反射鏡26YとY干渉計23Yによって干渉光が検出される。干渉光は電気信号に変換され、ステージ21の位置管理が行われる。
【0035】
加えて、以上説明した真空内処理装置では、トップテーブル側に光反射手段を設け、スライダ端部側に干渉計を設けている。従って、反射鏡、ビームスプリッタ等の光学部品をトップテーブル上に配置する必要がなく、トップテーブルの小型化、更にはトップテーブル質量の軽量化を実現することができる。これにより、試料室を小型化させ、コストを削減できる。また、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。
【0036】
なお、本実施形態では、トップテーブルの小型化を重視するために、トップテーブルに反射鏡を、スライダに干渉計を設置する構成を示したが、トップテーブルに干渉計を、スライダに反射鏡を設置しても、ステージの位置管理ができることは言うまでもない。
【0037】
トップテーブルに干渉計を、スライダに反射鏡を設置する構成の場合は、特許文献1と比較して、トップテーブルの小型化は期待できない。しかし、特許文献1のように、試料室内壁にバーミラーを設置する必要がないため、熱膨張により試料室2の外周が伸縮しても、スライダに設置された反射鏡への影響はない。よって、熱膨張による位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0038】
<従来技術と本実施形態との比較>
従来技術と第1の実施形態とを比較し、本実施形態の真空内処理装置の効果を検証する。
【0039】
(従来技術の試料室内寸、およびトップテーブル質量)
ここでは、従来技術である、トップテーブルにバーミラーを設置した光学顕微鏡機構を有するレビューSEM装置(図11)の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0040】
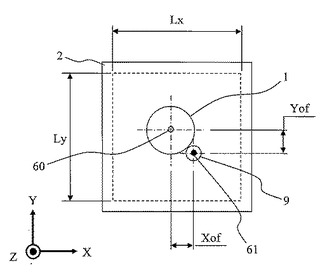
まず、試料室内寸を計算するため、バーミラーに必要な長さを求める。レビューSEM装置に加えて、光学顕微鏡(以下、OMと呼ぶ)を有する場合、ステージは、両機構の中心位置に対してΦ300mmウエハを全面移動させる必要がある(図11の点線部)。図12に示すようなSEM中心60とOM中心61のオフセット量(Xof、Yof)を有する場合、バーミラーに必要な長さLbは以下のように表せる。
【0041】
Lb=ウエハ直径+SEM中心とOM中心のオフセット量+レーザ光直径+レーザ光軸距離
=300+150+6+12.7=468.7mm
【0042】
なお、以下の数値を用いてLbを計算した。
ウエハ直径:Φ300mm
SEM中心とOM中心のオフセット量(Xof、Yof):150mm
レーザ光直径:6mm
レーザ光軸距離(バーミラーへのダブルパス光軸間距離):12.7mm
【0043】
実際は、バーミラーの反射面精度を保証する領域は、バーミラー外形より1〜2mm程度内側になるため、バーミラーの長さLbは最低470mm以上となる。
【0044】
バーミラーの長さが求まれば、試料室の内寸は、以下のように表せる。
【0045】
Lx(Ly)=バーミラー長さ(Lb)+ステージストローク
=470mm+450mm=920mm
【0046】
なお、以下の数値を用いてLx(Ly)を計算した。
Lb:470mm
ステージストローク:ウエハ直径+SEM中心とOM中心のオフセット量=450mm
【0047】
実際には、バーミラーと試料室内壁に隙間が必要である。したがって、試料室内寸は930mm程度になる。
【0048】
次に、トップテーブル質量に加算されるバーミラー質量を計算する。バーミラー形状をΦ30mm×470mm、材質を一般的な石英ガラスと仮定すると、1本当り約0.9kg程度となる。したがって、1.8kg程度がトップテーブル質量に加算される。
【0049】
(特許文献1の試料室内寸、およびトップテーブル質量)
ここでは、トップテーブルに干渉計を設置した光学顕微鏡機構を有するレビューSEM装置(特許文献1)の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0050】
まず、試料室内寸を計算するため、トップテーブルサイズを求める。干渉計は通常80mm程度の大きさで構成できるため、トップテーブルに必要な干渉計搭載スペースを80mmとすると、トップテーブルサイズ(Ltx、Lty)は以下のように表せる。
【0051】
Ltx(Lty)=ウエハ直径+干渉計搭載スペース
=300mm+80mm=380mm
【0052】
トップテーブルサイズが求まれば、試料室内寸は以下のように表せる。
【0053】
Lx(Ly)=トップテーブルサイズ(Ltx、Lty)+ステージストローク+バーミラー取付けスペース(Lbt)
=380mm+450mm+50mm=880mm
【0054】
実際には、干渉計とバーミラー、及びトップテーブルと試料室に各々隙間が必要であるため、試料室内寸は890mm程度となる。
【0055】
次に、トップテーブル質量に加算される干渉計質量を計算する。干渉計は1個当り約0.3kgであるため、0.6kg程度がトップテーブル質量に加算される。
【0056】
(本実施形態での試料室内寸、およびトップテーブル質量)
最後に、トップテーブルに反射鏡を設置した光学顕微鏡機構を有するレビューSEM装置の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0057】
まず、試料室内寸を計算するため、トップテーブルサイズを求める。トップテーブルに設置するダブルパスの反射に必要な反射鏡長さは、以下のように表せる。
【0058】
光軸距離12.7mm+レーザ光径6mm+裕度5mm=23.6mm
つまり、通常のダブルパス光学系では30mm程度で十分の長さとなる。よって、反射鏡の長さに適した厚みは、加工、及びミラー単体の剛性保持を考慮して5mm程度で十分である。角度の調整機構などを考慮して反射鏡の取付けに必要なスペースを20mmとすると、トップテーブルサイズ(Ltx、Lty)は以下のように表せる。
【0059】
Ltx(Lty)=ウエハ直径+反射鏡搭載スペース
=300mm+20mm=320mm
【0060】
トップテーブルサイズが求まれば、試料室内寸は図4に示すように、以下のように表せる。
【0061】
Lx(Ly)=トップテーブルサイズ(Ltx/Lty)+ステージストローク+干渉計サイズ(Lit)
=320mm+450mm+80mm=850mm
【0062】
実際には、干渉計、トップテーブルと試料室に各々隙間が必要であるため、試料室内寸は860mm程度になる。
【0063】
次に、トップテーブル質量に加算される反射鏡質量を計算する。反射鏡形状をΦ30mm×5mm、材質を一般的な石英ガラスと仮定すると、1個当り0.01kg程度となる。したがって、0.02kg程度がトップテーブル質量に加算される。
【0064】
(従来技術と比較した本実施形態の効果)
従来技術と比較した本実施形態の効果について検証する。まず、本実施形態による試料室内寸は、図11に表す従来技術と比較して930mm−860mm=70mmの小型化、特許文献1と比較して890mm−860mm=30mmの小型化、が実現可能となる。
【0065】
次に、トップテーブル質量は、図11に表す従来技術と比較して1.8kg−0.02kg=1.78kgの軽量化、特許文献1と比較して0.6kg−0.02kg=0.58kgの軽量化、が実現可能となる。
【0066】
以上より、本実施形態の真空内処理装置によれば、トップテーブルの小型化、軽量化を実現することで、ステージ移動速度、加速度を向上させることができる。これにより、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。また、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0067】
<第2の実施形態>
次に、本発明の第2の実施形態について、図5、図6を参照しつつ説明する。第1の実施形態では、トップテーブルに設置された反射鏡を参照鏡として、この参照鏡へ参照光を入射させることで基準光としていた。ここでは、カラム近傍の試料室内壁上部に取り付けたバーミラーを参照鏡とする構成について説明する。
【0068】
(レーザ測長器の構成)
本実施形態で用いる干渉計は、干渉計以外に反射鏡を配置して参照鏡とし、この参照鏡へ参照光を入射させることで基準光とするタイプである。すなわち、干渉計に構成される参照鏡に参照光を入射させることで基準光とするタイプ(図11)ではない。本実施形態で用いる干渉計は、レーザ測長器メーカより一般に市販されており、多くのユーザに使用されている。
【0069】
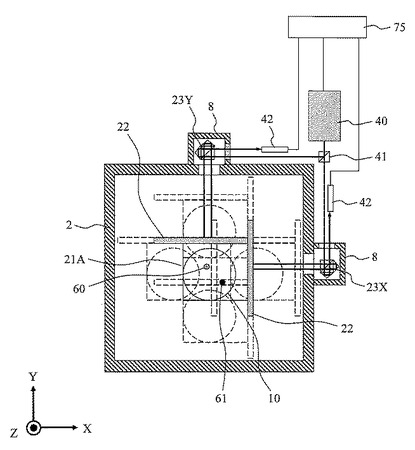
本実施形態では、参照鏡をXバーミラー22Xと、Yバーミラー22Yとして配置している。各々のバーミラーは、バーミラー取付け台51により、試料室2の光学カラム1近傍に位置する真空内壁上部に取付けられており、このバーミラーへ参照光を入射させることで基準光とする。
【0070】
このように、光学カラム1の近傍に参照鏡であるバーミラーを実装することで、温度傾斜により試料室2の外周壁に光学カラム1との温度差が生じても、カラム近傍の温度でステージ位置を測定できる。また、熱膨張により試料室2の外周が伸縮しても、バーミラーの歪み等の影響を減少させることができる。
【0071】
また、基準光を生成するためのバーミラーは試料室2の真空内壁上部(天井板の壁面)に固定されているため、干渉計が実装されるXスライダ21X、及びYスライダ21Yに、移動方向と直交方向に歪みが生じても、測長誤差は生じない。同時に、干渉計の動きが制約される場合、すなわちXガイド28X、及びYガイド28Yのガイド剛性が小さく、歪みが大きい場合でも、干渉計の位置変動を測長誤差に含まない。よって、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0072】
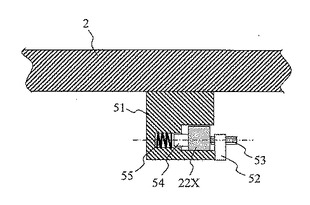
次に、本実施形態のバーミラーの固定方法について説明する。図7は、試料室へのバーミラー22Xの固定方法を示す断面図である。バーミラー22Xは試料室2の内壁に取付けられているミラー台51上に配置され、調整ネジ53に押しバネ55、及び押付けピン54によって生ずるバネ力によって押し付けられて、動かないよう固定されている。X軸、Y軸のバーミラーの直角度はこの調整ネジ53によって調整できる。なお、Yバーミラ22Yも同様の構成である。
【0073】
<第3の実施形態>
次に、本発明の第3の実施形態について、図8、図9を参照しつつ説明する。第1の実施形態では、X方向およびY方向の測長軸は1軸ずつであった。ここでは、X方向の測長軸をもう1軸追加してヨーイングを計測可能とするため、X1干渉計23X1に加えて23X2がXスライダ21Xに取付けられていることを特徴とする。
【0074】
(レーザ測長器の構成)
図8は、第1の実施形態において、ステージが移動した時のSEM中心60と干渉計のずれ量(ΔX、ΔY)を示したものである。通常、ステージの姿勢精度に起因する位置決め誤差は、基準ウエハを用いた測定誤差を予め計測して、それを補正値として実際のステージ移動座標に合わせて補正することで、殆どが除去できる。しかしながら、ステージのガイドや、テーブル剛性などの要因で、若干の不再現(ばらつき)が発生し、位置決め誤差が生じてしまう。
【0075】
ヨーイングの不再現をΔθとしたときに発生するアッベ誤差ΔDx、ΔDyは以下のように表せる。
【0076】
ΔDx≒ΔY・Δθ
ΔDy≒ΔX・Δθ
【0077】
Φ300mmウエハ外周を例にとり、Δθ=5μradと仮定すると、
ΔDx≒150mm・5μrad=750nm
となる。上記位置決め誤差を許容できる装置ならば問題無いが、本実施形態では、上記誤差が許容できない場合に、位置決め精度を向上させたレビューSEMについて説明する。
【0078】
図9は、本実施形態のステージ、及びレーザ測長器構成を示す平面図である。
【0079】
X1干渉計23X1によりX方向のステージ位置を、X1干渉計23X1とX2干渉計23X2の差分によりヨーイングを、各々測定する構成である。第1の実施形態との違いは、3軸測長になったことでミラ−49、透過窓56、レシーバ42が各々3軸に増えたこと、X反射鏡26Xがヨーイング軸に対応できるよう長くなったこと、である。
【0080】
ここで、X反射鏡26Xが必要な長さLXyawは以下のように表せる。
【0081】
LXyaw=光軸距離12.7mm+レーザ光径6mm+裕度5mm+(ヨーイング測定光軸とX距離測定光軸距離26mm)
=49.6mm
【0082】
一般的なウエハ外形はΦ200mm、或いはΦ300mmであるため、それらを保持するトップテーブルの大きさは少なくとも同程度の大きさが必要となる。これに加えて、従来は、トップテーブルに、トップテーブルの大きさ以上の長さを持つバーミラーを設置するか、ある程度の幅・大きさを持つ干渉計を2つ設置するのが一般的である。
【0083】
上記計算からわかるように、本実施形態では、X反射鏡26Xをトップテーブル外形よりも遥かに短く、薄く、かつ小さく構成できる。つまり、X反射鏡26Xを搭載するトップテーブルを小さく構成することができる。
【0084】
このような構成により、試料室内寸を小さくでき、装置コスト、ならびにフットプリントの低減が可能となる。
【0085】
また、トップテーブル21Aのヨーイングを常に測定できるため、ステージ位置とヨーイング不再現量を元に位置補正が可能となる。
【0086】
予め基準ウエハにて測定した時の、各測定座標(Xn、Ym)と位置決め誤差(ΔXn、ΔYm)とその時のヨーイング(θn)をセットで記憶しておき(例えばテーブルとして)、実際に位置決めした時の座標(X1'、Y1')と、ヨーイング(θ1')により、以下のような補正量の操作が可能となる。
【0087】
ΔX1'=ΔX1+X1'・(θ1−θ1')
ΔY1'=ΔY1+Y1'・(θ1−θ1')
【0088】
なお、本実施形態では、トップテーブルが単純なテーブル形式である場合について説明したが、各テーブル間の座標を1次補完する方式や、多項式を用いた曲面補正式などでも同じ効果が得られる。いずれの方式を採用しても、第一の実施形態に比べると飛躍的に位置決め精度が向上できるため、比較的位置決め精度の高い要求がある装置に対しても十分対応可能となる。また、観察点(SEM中心とウエハの交点)からのレーザ光軸距離が最も離れることで、アッベ誤差が大きくなるヨーイングに焦点を絞って測長軸を追加しているが、この他にピッチング、ローリングについても応用でき、これらについても一定の改善効果を得ることができる。
【0089】
<第4の実施形態>
次に、本発明の第4の実施形態について、図10を参照しつつ説明する。ここでは、第1〜第3の実施形態で用いた試料室内のミラー49に代えて、光ファイバによって干渉計にレーザ光を導入することを特徴とする。
【0090】
(レーザ測長器の構成および動作)
レーザヘッド40から照射されるレ−ザ光を2経路に分割する分光ユニット43は、ビームスプリッタ41、ミラー49、集光レンズ43A、光ファイバ接続部43Bにより構成される。なお、本実施形態では2軸に分光しているが、同様の構成により、更に多くの軸数でも対応可能である。
【0091】
分光ユニット43には光ファイバ48が接続され、試料室2に設けられた照射側フィードスルー44の大気側に接続される。その後、照射側フィードスルー44の真空側から再度光ファイバが接続され、X取付け台57X、及びY取付け台57Yまで引回され、照射ユニット46へ接続される。
【0092】
照射ユニット46は、図示しないコリメートレンズと、光ファイバ接続部品により形成できるが、特許文献1で示されるような2周波レーザを別個の光ファイバにて導入し、照射ユニット内にて偏光スプリッタにより2周波レーザとして合成した後、干渉計へ照射することも可能である。
【0093】
X干渉計23X、及びY干渉計23Yは、ウエハ10の軸中心に一致するよう配置されており、照射ユニット46と各々の干渉計の位置関係はアライメントされて、ファイバを接続するだけで干渉計への適切な入射角と位置が確保できる。
【0094】
トップテーブル21Aに配置されるX反射鏡26X、及びY反射鏡26Yに入反射したレーザ光を受光する受光ピックアップ47は、光ファイバにて受光側フィードスルーの真空側に接続される。なお、受光ピックアップには、図示しない集光レンズが入口に実装されており、レーザ光を光ファイバーに導入する機能を有している。その後、照射側フィードスルー44の大気側から再度光ファイバ48が接続され、レシーバ42に接続され、電気信号に変換され、レーザユニット75へと伝達されて、位置情報へと変換される。
【0095】
本実施形態では、照明ユニット、受光ピックアップ、干渉計を分離して表記しているが、これらを1ユニットとして構成することも可能であり、このような一体型の構成にすることで、コンパクト化と取付け容易性向上が実現できる。ここで、真空側の光ファイバについては、放出ガスによる汚染を低減するために、被覆は四フッ化エキレン樹脂のような低アウトガス材料が好ましい。また、光ファイバにダメージが出ない程度の温度(例えば80℃)にて真空脱ガスを実施してから実装すると更に放出ガスの発生量を低減させることができる。また、光ファイバのフィードスルーを照射側と受光側に分けているが、装置レイアウトによっては、測長軸毎に、照射用の光ファイバと受光用の光ファイバを接続できるフィードスルーに分けても良い。または、全ての照射用の光ファイバと受光用の光ファイバを接続できる一個のフィードスルーでも良い。
【0096】
従来、特許文献1のようなトップテーブル上の干渉計へ光ファイバを導入したとしても、2次元平面を移動するトップテーブルへ光ファイバを引回す必要があるため、光学経路が煩雑化する。また、光ファイバの長さが長くなると、光ファイバの被覆に用いられる樹脂が揮発することで発生する放出ガスも増加し、真空内処理装置の真空度への影響も問題となる。
【0097】
しかしながら、本実施形態では上記構成により、真空中で可動する光ファイバをトップテーブルまで引回すことなく、短い長さで実装することができる。これにより、光ファイバの被覆に使用される樹脂の量を少なくすることができるため、放出ガスの発生量を低減させることができる。
【0098】
また、本実施形態の光ファイバは、X方向またはY方向どちらか1次元方向へ可動すれば足りるため、引回しが容易である。これにより、折れ、擦れなどの光ファイバへのダメージも低減できる。
【0099】
<まとめ>
本実施形態では、従来トップテーブル21Aに設置していたバーミラーまたは干渉計を除去し、トップテーブル21AにX反射鏡26XとY反射鏡26Yを設置する。また、X干渉計23XとY干渉計23Yは、Xスライダ21XとYスライダ21Yに設置する。
【0100】
このような構成により、トップテーブルの小型化、軽量化を実現でき、ステージ移動速度、加速度を向上させることができる。これにより、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。また、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0101】
また、本実施形態では、カラム近傍の試料室内壁上部に、参照鏡としてバーミラーを取り付ける。
【0102】
このような構成により、温度傾斜により試料室2の外周壁に光学カラム1との温度差が生じても、カラム近傍の温度でステージ位置を測定できる。別の言い方をすれば、熱膨張により試料室2の外周が伸縮しても、バーミラーの歪み等の影響を減少させることができる。
【0103】
また、干渉計が実装されるXスライダ21X、及びYスライダ21Yに、移動方向と直交方向に歪みが生じる場合、またはXガイド28X、及びYガイド28Yのガイド剛性が小さく、歪みが大きい場合でも、干渉計の位置変動が測長誤差に含まれない。よって、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0104】
また、本実施形態では、X1干渉計23X1に加えて、23X2をXスライダ21Xに取り付ける。
【0105】
このような構成により、X反射鏡26Xを搭載するトップテーブルを小さく構成しながらも、X方向の測長軸をもう1軸追加することができ、ヨーイング計測が可能となる。これにより、試料室内寸を小さくでき、装置コスト、ならびにフットプリントの低減が可能となる。また、トップテーブルのヨーイングを常に測定できるため、ステージ位置とヨーイング不再現量を元に位置補正が可能となる。
【0106】
また、本実施形態では、スライダに取り付けられた干渉計に、光ファイバを用いてレーザ光を導入する。
【0107】
このような構成により、光ファイバをトップテーブルまで引回すことなく、短い長さで実装することができる。これにより、光ファイバの被覆に使用される樹脂の量を少なくすることができるため、放出ガスの発生量を低減させることができる。また、本実施形態の光ファイバは、X方向またはY方向どちらか1次元方向へ可動すれば足りるため、引回しが容易である。これにより、折れ、擦れなどの光ファイバへのダメージも低減できる。
【0108】
この場合、光ファイバの被覆は四フッ化エキレン樹脂であれば、さらに放出ガスの発生量を低減させることができる。
【符号の説明】
【0109】
1・・・カラム、2・・・試料室、3・・・ロードロック、4・・・マウント、5・・・真空ポンプ、6・・・架台、7・・・干渉計容器、10・・・ウエハ、11・・・電子銃、12・・・電子線、13・・・電子レンズ、14・・・偏向器、14A・・・位置偏向器、14B・・・走査偏向器、15・・・検出器、16・・・電子レンズ、17・・・偏向制御部、21・・・ステージ、21A・・・トップテーブル、21B・・・連結ベース、21C・・・連結柱、21X・・・Xスライダ、21Y・・・Yスライダ、22・・・バーミラー、22X・・・Xバーミラー、22Y・・・Yバーミラー、23・・・干渉計、23X・・・X干渉計、23X1・・・X1干渉計、23X2・・・X2干渉計、23Y・・・Y干渉計、24・・・静電チャック、25・・・Zセンサ、26・・・反射鏡、26X・・・X反射鏡、26Y・・・Y反射鏡、27X・・・Xスライダガイド、27Y・・・Yスライダガイド、28X・・・Xガイド、28Y・・・Yガイド、29X・・・X取付けスペーサ、29Y・・・Y取付けスペーサ、31・・・搬送ロボット、32・・・真空側ゲートバルブ、33・・・大気側ゲートバルブ、40・・・レーザヘッド、41・・・ビームスプリッタ、42・・・レシーバ、43・・・分光ユニット、43A・・・集光レンズ、43B・・・光ファイバ接続部、44・・・照射側フィードスルー、45・・・受光側フィードスルー、46・・・照射ユニット、47・・・受光ピックアップ、48・・・光ファイバ、49・・・ミラー、51・・・ミラー台、52・・・ネジ受け、53・・・調整ネジ、54・・・押付けピン、55・・・押しバネ、56・・・透過窓、57X・・・X取付け台、57Y・・・Y取付け台、60・・・SEM中心、61・・・OM中心、70・・・カラム制御部、71・・・位置制御部、72・・・ステージ制御部、73・・・画像制御部、74・・・モニタ、75・・・レーザユニット
【技術分野】
【0001】
本発明は、真空内処理装置、特に試料の観察を行う走査電子顕微鏡、およびイオンビーム加工を行う荷電粒子線装置に関するものである。
【背景技術】
【0002】
近年、半導体製品の集積度は益々の向上が求められており、その回路パターンは更に高精細化してきている。精細なパターンの製造、及び検査を行うためには、ウエハを正確に所望な位置に移動する必要がある。ウェハが所望な位置に移動したかを確認する手段として、一般的にレーザ測長器が採用されている。
【0003】
レーザ測長器は、レーザヘッドより照射された直交する2種類の偏向されたレーザ光を干渉計内にて分離し、一方を基準光として干渉計内に反射させて、もう一方を測定光として被測定物となる反射鏡に反射させた後、再び干渉計内に取り込み、基準光と重ねて干渉光を発生させる。干渉光はフォトディテクター(以下、レシーバと呼ぶ)により電気信号に変換され、レーザ基板にて位置情報へ変換される。反射鏡と干渉計との相対変化により干渉光は変化するため、その変化をレーザ基板内のカウンタにて加算・減算することで位置管理がなされる。
【0004】
レーザ測長器を使用する検査装置は、荷電粒子線を照射しウエハ上の回路パターンの寸法精度を測定する走査型電子顕微鏡(以下、測長SEMと呼ぶ)、荷電粒子線を照射しウエハ上の回路パターンの欠陥、或いは付着異物を評価する走査型電子顕微鏡(以下、レビューSEMと呼ぶ)などが挙げられる。
【0005】
近年のレビューSEMは、多機能化が進み、本来の荷電粒子線による異物の観察機構だけでなく、光学顕微鏡による異物の検出・観察機構、表面電位計によるウエハの帯電状況計測機構なども付加されてきている。試料となるウエハを移動するトップテーブルは、これら各機構を中心としてウエハ直径分の距離を確保できる範囲を移動する必要がある。つまり、多機能化によりステージの移動範囲(ステージストローク)は広がる傾向にある。これに加えて、量産コストの低下を図るべく、従来まで主流だったΦ300mmウエハに代えて、Φ450mmウエハの導入も検討されており、更なるステージストロークの増加が要求されている。
【0006】
ステージストロークが増大すると、試料室が大型化するため、コストが増加する。また、ステージ移動時間も増加するため、半導体製品のスループットが低下し、やはりコストが増加する。ステージ移動時間を減少させるためには、ステージ移動速度や加速度を上げる必要があり、そのためには試料を載せるトップテーブル質量は出来る限り軽減させなければならない。
【0007】
図11は、光学顕微鏡を搭載したレビューSEM装置の従来例を示す図である。レーザヘッド40からのレーザ光は、ビームスプリッタ41により分離され、干渉計23Xと23Yに入射した後、反射鏡の役目となるバーミラー22で反射され、再度干渉計23Xと23Yに入射する。この状態でトップテーブルが移動すると、ドップラー効果による干渉光が発生する。この干渉光をレシーバ42で検出し、レーザユニット75で電気信号に変換することで、トップテーブル21Aの位置管理を行う。図11のように、一般的には、長く重いバーミラー22がトップテーブル21Aに設置されるため、トップテーブル21Aは重量化する。また、トップテーブル21Aはバーミラーにより実質的に大型化し、これによりトップテーブル21Aの移動範囲を包含する試料室2も大型化する。
【0008】
特許文献1では、重いバーミラーをトップテーブルから除去するかわりに軽い干渉計を配置し、逆に試料室内のベース上にバーミラーを固定配置する構造が提案されている。これにより、トップテーブル質量を軽量化でき、加速度を上げつつ、振動等のステージ特性劣化要因を抑える効果が得られる。また、トップテーブルを小型化できるので、試料室を小型化できる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平4−351905
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、特許文献1に開示されるステージでは、バーミラー自体はやはり真空試料室内に配置されるものであり、かつトップテーブルの移動ストローク程度の長さを確保する必要がある。従って、トップテーブルの小型化という点では効果があるが、真空試料室自体の小型化に対しては余り効果がない。
【0011】
本発明は、このような状況に鑑みてなされたものであり、トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ、バーミラーのような長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置を実現することを目的とする。
【課題を解決するための手段】
【0012】
真空内処理装置内に配置されるステージは、移動方向に応じた移動軸を有する。例えば、XYステージの場合は、互いに直交するX軸およびY軸2つの移動軸を持ち、試料台や試料固着装置など各種の構造物が載置されるトップテーブルは、2つの移動軸各々に沿って移動可能である。XYステージの場合、原理的には、2つの移動軸が交差さえしていれば、XY面内方向での任意位置へのステージ移動が可能である。
【0013】
さて、従来技術の問題は、干渉計と当該干渉計に光を反射させる反射体の一方または両者が固定であるという点に起因する。例えば、特許文献1に開示される構造のステージでは、X方向またはY方向の移動軸に沿った方向に干渉計および反射体が一対ずつ配置された構成を有している。ステージは一方の移動軸と交差する方向に対しても移動できるように構成されているが、反射体は固定されている。そのため、反射体には上記交差方向に対する移動ストローク分の長さが必要となる。
【0014】
そこで本発明は、測長に使用される一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち、測長が行われる干渉計および反射体の組がなす方向(あるいは当該方向と平行な方向)とは交差する移動軸(あるいは当該移動軸に平行な方向)に沿って、上記干渉計および反射体の組が互いに対向する位置関係を保ったまま移動できるようにステージを構成することにより、上記課題を解決する。
【発明の効果】
【0015】
本発明によれば、トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置が実現される。荷電粒子線装置においては、装置容積のうち真空試料室がかなりの部分を占めるので、真空試料室が小型化されることにより、設置スペースが少ない荷電粒子線装置を実現することができる。ひいては、真空排気に要する時間も少なく、荷電粒子光学カラムや真空試料室内を高真空に維持可能で、試料汚染や放電の少ない荷電粒子線装置を実現することができる。
【図面の簡単な説明】
【0016】
【図1】本発明のレビューSEMを示す説明図
【図2】本発明のステージ、及びレーザ測長器構成を示す平面図
【図3】本発明のステージ、及びレーザ測長器構成を示す側面図
【図4】本発明のステージ、及びレーザ測長器の各寸法を示す平面図
【図5】本発明のステージ、及びレーザ測長器構成を示す平面図
【図6】本発明のステージ、及びレーザ測長器構成を示す側面図
【図7】試料室へのバーミラーの固定方法を示す断面図
【図8】ステージ移動時のSEM中心と干渉計測定軸とのずれを示す平面図
【図9】本発明のステージ、及びレーザ測長器構成を示す平面図
【図10】本発明のステージ、及びレーザ測長器構成を示す平面図
【図11】従来のステージ、及びレーザ測長器構成を示す平面図
【図12】従来のステージ、及びレーザ測長器構成を示す平面図
【発明を実施するための形態】
【0017】
本発明は、真空内処理装置、特に試料の観察を行う走査電子顕微鏡、およびイオンビーム加工を行う荷電粒子線装置に関するものである。
【0018】
以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は本発明を実現するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成については同一の参照番号が付されている。
【0019】
本実施形態では、真空内処理装置のうちレビューSEMなどの荷電粒子線装置を例に説明するが、レビューSEMに限ることなく、真空中でレーザ測長器を使用する装置であれば同様の効果が期待できる。
【0020】
<第1の実施形態>
はじめに、本発明の第1の実施形態について、図1ないし図4を参照しつつ説明する。
【0021】
(レビューSEMの装置構成)
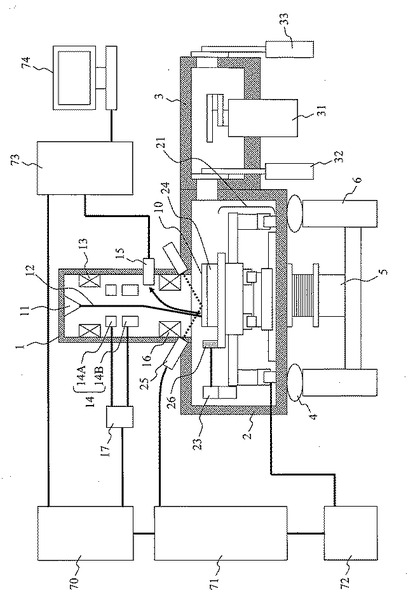
図1は、本実施形態のレビューSEMの概略構成図である。床に設置される架台6には、床振動を除振するマウント4が取付けられており、更にマウント4は試料室2を支持している。試料室2には、電子線を生成・制御する光学カラム1、試料を搬送する搬送ロボット31が内包されるロードロック3が取付けられている。試料室2は真空ポンプ5により常時真空排気されており、光学カラム1内も図示しない真空ポンプにより高真空度に保たれている。一方、ロードロック3には、大気との隔離を行う大気側ゲートバルブ33、試料室2との隔離を行う真空側ゲートバルブ32が取付けられている。
【0022】
ステージ21には、ウエハ10を静電吸着する静電チャック24、ステージ21の相対的な距離変化をレーザ測長によって把握するための干渉計23及び反射鏡26、が取り付けられている。ステージ21の位置管理は、ステージの位置情報を生成する位置制御部71、ステージ駆動を行うステージ制御部72、により行う。ステージ制御部72では現在の位置情報と目的座標との偏差が無くなるようにフィードバック制御を行っている。フィードバック制御には単純な位置フィードバックのみで行う制御や、ステージの速度情報、ステージ位置偏差の積分情報を加えて応答速度と位置決め精度を向上させるPID制御などが考えられる。
【0023】
光学カラム1には、電子銃11により発生した電子線12を収束させる電子レンズ13、及び電子レンズ16、所望の軌道に偏向させる偏向器14、電子線の照射により試料10から発生する反射電子、或いは2次電子を検出する検出器15、が取り付けられている。ウエハ10の画像は、偏向器14の制御情報と得られた検出器15からの情報を基に画像制御部73により生成され、モニタ74により表示される。
【0024】
試料室2の上方には、試料の高さ検出を行う光学式のZセンサ25が取付けられており、常時ウエハの高さをモニタ可能であり、Zセンサ25から得られた信号は位置制御部71で位置変換された後、カラム制御部に伝達される。この信号によりカラム制御部は電子レンズの光学条件を変更し、試料の高さが変化してもフォーカスがずれないよう処理している。
【0025】
前述したステージ位置情報は光学カラム1の制御を行うカラム制御部70にも伝達され、偏向器14が生成する電子線の偏向制御信号を補正する。偏向器14は、ウエハ位置に電子線の偏向中心を位置決めする位置偏向器14A、撮像するために荷電粒子線を高速で目的視野内を走査する走査偏向器14B、に分かれており、これらの偏向器の制御は偏向制御部17によって各々制御される。例えば、ステージの現在位置が目標座標より偏向範囲内(例えば10μm以内)にずれていた場合、その偏差を位置制御部71からカラム制御部70に伝達し、偏差が無い状態の偏向指令値に偏差分を補正量として加える。上記一連の動作により、ウエハが正確に画像中心となるように位置決めすることができる。
【0026】
(レーザ測長器の構成および動作)
次に、本実施形態のレーザ測長器構成および動作について、図2、及び図3を参照しつつ詳細に説明する。
【0027】
図2は、本実施形態のステージ、及びレーザ測長器構成を示す平面図であり、図3は、本実施形態のステージ、及びレーザ測長器構成を示す側面図である。
【0028】
本実施形態では、トップテーブル21Aには、X反射鏡26XとY反射鏡26Yが実装され、Xスライダ21XとYスライダ21Yには、それぞれX干渉計23XとY干渉計23Yが実装されていることを特徴とする。以下、詳細に説明する。
【0029】
X干渉計23XとY干渉計23Yは、X取付け台57Xと、図示しないY取付け台を介して、Xスライダ21X及びYスライダ21Yの一方の端部に取付けられている。Xスライダ21XおよびYスライダ21Yは、各々、X方向の移動軸およびY方向の移動軸に沿ってX方向ないしY方向に移動することが可能である。この移動軸は、仮想的なものである場合もあれば、スライダの移動のために使用される何らかの物理的な軸部材である場合もある。よって、X干渉計23Xは、Xスライダ21Xと共にY方向に移動し、Y干渉計23Yは、Yスライダ21Yと共にX方向に移動することとなる。
【0030】
Xスライダ21Xは、両端に連結されるY取付けスペーサ29YによってYガイド28Yに取り付けられ、Yガイド28YによってY方向に案内される。ここで、案内とは、特定の方向のみに移動を可能として、その他の方向には移動しない動作を意味する。一方、Yスライダ21Yは、両端に連結されるX取付けスペーサ29XによってXガイド28Xに取り付けられ、Xガイド28XによってX方向に案内される。前述のように、X干渉計23XとY干渉計23Yは、Xスライダ21XまたはYスライダ21Yの一方の端部に取付けられている。従って、Xスライダ21XまたはYスライダ21Yが、Yガイド28YまたはXガイド28Xに沿って、それぞれY方向ないしX方向に移動すれば、X干渉計23XまたはY干渉計23Yも、Yガイド28YまたはXガイド28Xに沿って、Y方向ないしX方向に移動することになる。Xガイド28XまたはYガイド28Yの移動軸が、Xスライダ21XまたはYスライダ21Yの移動軸と平行であることは図から明らかである。
【0031】
更にまた、トップテーブル21Aは、Xスライダ21X上のXスライダガイド27Xと連結され、トップテーブル21Aは、Yスライダ21Y上のYスライダガイド27Yと、連結ベース21B及び連結柱21Cによって連結される。よって、トップテーブル21Aもまた、Xスライダ21Xの移動軸またはYスライダ21Yの移動軸に沿って、XY水平面内を移動可能となる。
【0032】
以上の構成を採用した場合の光学経路について説明する。まず、図2において、レーザヘッド40から照射されるレーザ光は、透過窓56を通過し、試料室2に導入される。その後、ビームスプリッタ41にて2経路に分割され、各々X干渉計23XとY干渉計23Yに導入される。X干渉計23XとY干渉計23Yに導入されたレーザ光は、トップテーブル21Aに実装されたX反射鏡26XとY反射鏡26Yにより反射され、再びX干渉計23XとY干渉計23Yに導入される。X干渉計23XとY干渉計23Yで干渉したレーザ光は、ミラー49により曲げられ、各々透過窓56を通過して、レシーバ42に入射する。ここで、干渉光が電気信号に変換された後、レーザユニット75へと伝達されて、位置情報と変換される。なお、本実施形態では、ダブルパス方式を想定しているため、干渉計と反射鏡間は2本のレーザ光が記載されているが、反射鏡をコーナキューブに変更し、干渉計をシングルパス用に変更することでも、シングルパスレーザ測長系として問題なく動作可能となる。
【0033】
さて、図2に示される通り、X干渉計23XとX反射鏡26XおよびY干渉計23YとY反射鏡26Yとは、各々光学経路を構成しており、これらの光学経路はいずれもXスライダ21XおよびYスライダ21Y上に存在する。前述の通り、反射体はトップテーブル上に取付けられており、かつ干渉計はXスライダ21XまたはYスライダ21Yの一方の端部に固定されている。Xスライダ21XまたはYスライダ21Yは、Yガイド28YまたはXガイド28X沿ってそれぞれ移動可能である。
【0034】
このような構成を採用することで、X、Yそれぞれの干渉計と反射体の組は、互いに対向する位置関係を保ったまま、スライダまたはガイドの移動軸に沿って移動することが可能となる。従って、トップテーブルがどのように動いても、光学経路は干渉計と反射体との間から外れることがない。よって、従来必要だった長尺のバーミラーは不要で真空試料室のサイズを小型化でき、かつ従来と変わらない測長機能を実現することができる。すなわち、トップテーブル21AがX方向へ移動すれば、X反射鏡26XとX干渉計23Xによって干渉光が検出される。Y方向へ移動すればY反射鏡26YとY干渉計23Yによって干渉光が検出される。干渉光は電気信号に変換され、ステージ21の位置管理が行われる。
【0035】
加えて、以上説明した真空内処理装置では、トップテーブル側に光反射手段を設け、スライダ端部側に干渉計を設けている。従って、反射鏡、ビームスプリッタ等の光学部品をトップテーブル上に配置する必要がなく、トップテーブルの小型化、更にはトップテーブル質量の軽量化を実現することができる。これにより、試料室を小型化させ、コストを削減できる。また、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。
【0036】
なお、本実施形態では、トップテーブルの小型化を重視するために、トップテーブルに反射鏡を、スライダに干渉計を設置する構成を示したが、トップテーブルに干渉計を、スライダに反射鏡を設置しても、ステージの位置管理ができることは言うまでもない。
【0037】
トップテーブルに干渉計を、スライダに反射鏡を設置する構成の場合は、特許文献1と比較して、トップテーブルの小型化は期待できない。しかし、特許文献1のように、試料室内壁にバーミラーを設置する必要がないため、熱膨張により試料室2の外周が伸縮しても、スライダに設置された反射鏡への影響はない。よって、熱膨張による位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0038】
<従来技術と本実施形態との比較>
従来技術と第1の実施形態とを比較し、本実施形態の真空内処理装置の効果を検証する。
【0039】
(従来技術の試料室内寸、およびトップテーブル質量)
ここでは、従来技術である、トップテーブルにバーミラーを設置した光学顕微鏡機構を有するレビューSEM装置(図11)の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0040】
まず、試料室内寸を計算するため、バーミラーに必要な長さを求める。レビューSEM装置に加えて、光学顕微鏡(以下、OMと呼ぶ)を有する場合、ステージは、両機構の中心位置に対してΦ300mmウエハを全面移動させる必要がある(図11の点線部)。図12に示すようなSEM中心60とOM中心61のオフセット量(Xof、Yof)を有する場合、バーミラーに必要な長さLbは以下のように表せる。
【0041】
Lb=ウエハ直径+SEM中心とOM中心のオフセット量+レーザ光直径+レーザ光軸距離
=300+150+6+12.7=468.7mm
【0042】
なお、以下の数値を用いてLbを計算した。
ウエハ直径:Φ300mm
SEM中心とOM中心のオフセット量(Xof、Yof):150mm
レーザ光直径:6mm
レーザ光軸距離(バーミラーへのダブルパス光軸間距離):12.7mm
【0043】
実際は、バーミラーの反射面精度を保証する領域は、バーミラー外形より1〜2mm程度内側になるため、バーミラーの長さLbは最低470mm以上となる。
【0044】
バーミラーの長さが求まれば、試料室の内寸は、以下のように表せる。
【0045】
Lx(Ly)=バーミラー長さ(Lb)+ステージストローク
=470mm+450mm=920mm
【0046】
なお、以下の数値を用いてLx(Ly)を計算した。
Lb:470mm
ステージストローク:ウエハ直径+SEM中心とOM中心のオフセット量=450mm
【0047】
実際には、バーミラーと試料室内壁に隙間が必要である。したがって、試料室内寸は930mm程度になる。
【0048】
次に、トップテーブル質量に加算されるバーミラー質量を計算する。バーミラー形状をΦ30mm×470mm、材質を一般的な石英ガラスと仮定すると、1本当り約0.9kg程度となる。したがって、1.8kg程度がトップテーブル質量に加算される。
【0049】
(特許文献1の試料室内寸、およびトップテーブル質量)
ここでは、トップテーブルに干渉計を設置した光学顕微鏡機構を有するレビューSEM装置(特許文献1)の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0050】
まず、試料室内寸を計算するため、トップテーブルサイズを求める。干渉計は通常80mm程度の大きさで構成できるため、トップテーブルに必要な干渉計搭載スペースを80mmとすると、トップテーブルサイズ(Ltx、Lty)は以下のように表せる。
【0051】
Ltx(Lty)=ウエハ直径+干渉計搭載スペース
=300mm+80mm=380mm
【0052】
トップテーブルサイズが求まれば、試料室内寸は以下のように表せる。
【0053】
Lx(Ly)=トップテーブルサイズ(Ltx、Lty)+ステージストローク+バーミラー取付けスペース(Lbt)
=380mm+450mm+50mm=880mm
【0054】
実際には、干渉計とバーミラー、及びトップテーブルと試料室に各々隙間が必要であるため、試料室内寸は890mm程度となる。
【0055】
次に、トップテーブル質量に加算される干渉計質量を計算する。干渉計は1個当り約0.3kgであるため、0.6kg程度がトップテーブル質量に加算される。
【0056】
(本実施形態での試料室内寸、およびトップテーブル質量)
最後に、トップテーブルに反射鏡を設置した光学顕微鏡機構を有するレビューSEM装置の場合の、試料室内寸、およびトップテーブル質量を計算する。
【0057】
まず、試料室内寸を計算するため、トップテーブルサイズを求める。トップテーブルに設置するダブルパスの反射に必要な反射鏡長さは、以下のように表せる。
【0058】
光軸距離12.7mm+レーザ光径6mm+裕度5mm=23.6mm
つまり、通常のダブルパス光学系では30mm程度で十分の長さとなる。よって、反射鏡の長さに適した厚みは、加工、及びミラー単体の剛性保持を考慮して5mm程度で十分である。角度の調整機構などを考慮して反射鏡の取付けに必要なスペースを20mmとすると、トップテーブルサイズ(Ltx、Lty)は以下のように表せる。
【0059】
Ltx(Lty)=ウエハ直径+反射鏡搭載スペース
=300mm+20mm=320mm
【0060】
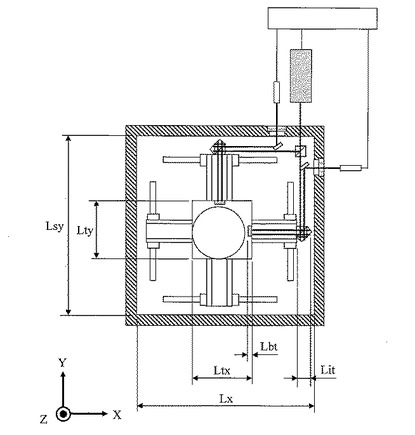
トップテーブルサイズが求まれば、試料室内寸は図4に示すように、以下のように表せる。
【0061】
Lx(Ly)=トップテーブルサイズ(Ltx/Lty)+ステージストローク+干渉計サイズ(Lit)
=320mm+450mm+80mm=850mm
【0062】
実際には、干渉計、トップテーブルと試料室に各々隙間が必要であるため、試料室内寸は860mm程度になる。
【0063】
次に、トップテーブル質量に加算される反射鏡質量を計算する。反射鏡形状をΦ30mm×5mm、材質を一般的な石英ガラスと仮定すると、1個当り0.01kg程度となる。したがって、0.02kg程度がトップテーブル質量に加算される。
【0064】
(従来技術と比較した本実施形態の効果)
従来技術と比較した本実施形態の効果について検証する。まず、本実施形態による試料室内寸は、図11に表す従来技術と比較して930mm−860mm=70mmの小型化、特許文献1と比較して890mm−860mm=30mmの小型化、が実現可能となる。
【0065】
次に、トップテーブル質量は、図11に表す従来技術と比較して1.8kg−0.02kg=1.78kgの軽量化、特許文献1と比較して0.6kg−0.02kg=0.58kgの軽量化、が実現可能となる。
【0066】
以上より、本実施形態の真空内処理装置によれば、トップテーブルの小型化、軽量化を実現することで、ステージ移動速度、加速度を向上させることができる。これにより、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。また、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0067】
<第2の実施形態>
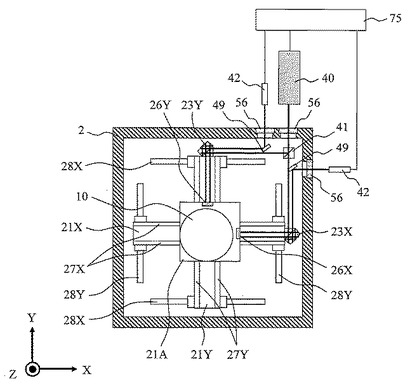
次に、本発明の第2の実施形態について、図5、図6を参照しつつ説明する。第1の実施形態では、トップテーブルに設置された反射鏡を参照鏡として、この参照鏡へ参照光を入射させることで基準光としていた。ここでは、カラム近傍の試料室内壁上部に取り付けたバーミラーを参照鏡とする構成について説明する。
【0068】
(レーザ測長器の構成)
本実施形態で用いる干渉計は、干渉計以外に反射鏡を配置して参照鏡とし、この参照鏡へ参照光を入射させることで基準光とするタイプである。すなわち、干渉計に構成される参照鏡に参照光を入射させることで基準光とするタイプ(図11)ではない。本実施形態で用いる干渉計は、レーザ測長器メーカより一般に市販されており、多くのユーザに使用されている。
【0069】
本実施形態では、参照鏡をXバーミラー22Xと、Yバーミラー22Yとして配置している。各々のバーミラーは、バーミラー取付け台51により、試料室2の光学カラム1近傍に位置する真空内壁上部に取付けられており、このバーミラーへ参照光を入射させることで基準光とする。
【0070】
このように、光学カラム1の近傍に参照鏡であるバーミラーを実装することで、温度傾斜により試料室2の外周壁に光学カラム1との温度差が生じても、カラム近傍の温度でステージ位置を測定できる。また、熱膨張により試料室2の外周が伸縮しても、バーミラーの歪み等の影響を減少させることができる。
【0071】
また、基準光を生成するためのバーミラーは試料室2の真空内壁上部(天井板の壁面)に固定されているため、干渉計が実装されるXスライダ21X、及びYスライダ21Yに、移動方向と直交方向に歪みが生じても、測長誤差は生じない。同時に、干渉計の動きが制約される場合、すなわちXガイド28X、及びYガイド28Yのガイド剛性が小さく、歪みが大きい場合でも、干渉計の位置変動を測長誤差に含まない。よって、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0072】
次に、本実施形態のバーミラーの固定方法について説明する。図7は、試料室へのバーミラー22Xの固定方法を示す断面図である。バーミラー22Xは試料室2の内壁に取付けられているミラー台51上に配置され、調整ネジ53に押しバネ55、及び押付けピン54によって生ずるバネ力によって押し付けられて、動かないよう固定されている。X軸、Y軸のバーミラーの直角度はこの調整ネジ53によって調整できる。なお、Yバーミラ22Yも同様の構成である。
【0073】
<第3の実施形態>
次に、本発明の第3の実施形態について、図8、図9を参照しつつ説明する。第1の実施形態では、X方向およびY方向の測長軸は1軸ずつであった。ここでは、X方向の測長軸をもう1軸追加してヨーイングを計測可能とするため、X1干渉計23X1に加えて23X2がXスライダ21Xに取付けられていることを特徴とする。
【0074】
(レーザ測長器の構成)
図8は、第1の実施形態において、ステージが移動した時のSEM中心60と干渉計のずれ量(ΔX、ΔY)を示したものである。通常、ステージの姿勢精度に起因する位置決め誤差は、基準ウエハを用いた測定誤差を予め計測して、それを補正値として実際のステージ移動座標に合わせて補正することで、殆どが除去できる。しかしながら、ステージのガイドや、テーブル剛性などの要因で、若干の不再現(ばらつき)が発生し、位置決め誤差が生じてしまう。
【0075】
ヨーイングの不再現をΔθとしたときに発生するアッベ誤差ΔDx、ΔDyは以下のように表せる。
【0076】
ΔDx≒ΔY・Δθ
ΔDy≒ΔX・Δθ
【0077】
Φ300mmウエハ外周を例にとり、Δθ=5μradと仮定すると、
ΔDx≒150mm・5μrad=750nm
となる。上記位置決め誤差を許容できる装置ならば問題無いが、本実施形態では、上記誤差が許容できない場合に、位置決め精度を向上させたレビューSEMについて説明する。
【0078】
図9は、本実施形態のステージ、及びレーザ測長器構成を示す平面図である。
【0079】
X1干渉計23X1によりX方向のステージ位置を、X1干渉計23X1とX2干渉計23X2の差分によりヨーイングを、各々測定する構成である。第1の実施形態との違いは、3軸測長になったことでミラ−49、透過窓56、レシーバ42が各々3軸に増えたこと、X反射鏡26Xがヨーイング軸に対応できるよう長くなったこと、である。
【0080】
ここで、X反射鏡26Xが必要な長さLXyawは以下のように表せる。
【0081】
LXyaw=光軸距離12.7mm+レーザ光径6mm+裕度5mm+(ヨーイング測定光軸とX距離測定光軸距離26mm)
=49.6mm
【0082】
一般的なウエハ外形はΦ200mm、或いはΦ300mmであるため、それらを保持するトップテーブルの大きさは少なくとも同程度の大きさが必要となる。これに加えて、従来は、トップテーブルに、トップテーブルの大きさ以上の長さを持つバーミラーを設置するか、ある程度の幅・大きさを持つ干渉計を2つ設置するのが一般的である。
【0083】
上記計算からわかるように、本実施形態では、X反射鏡26Xをトップテーブル外形よりも遥かに短く、薄く、かつ小さく構成できる。つまり、X反射鏡26Xを搭載するトップテーブルを小さく構成することができる。
【0084】
このような構成により、試料室内寸を小さくでき、装置コスト、ならびにフットプリントの低減が可能となる。
【0085】
また、トップテーブル21Aのヨーイングを常に測定できるため、ステージ位置とヨーイング不再現量を元に位置補正が可能となる。
【0086】
予め基準ウエハにて測定した時の、各測定座標(Xn、Ym)と位置決め誤差(ΔXn、ΔYm)とその時のヨーイング(θn)をセットで記憶しておき(例えばテーブルとして)、実際に位置決めした時の座標(X1'、Y1')と、ヨーイング(θ1')により、以下のような補正量の操作が可能となる。
【0087】
ΔX1'=ΔX1+X1'・(θ1−θ1')
ΔY1'=ΔY1+Y1'・(θ1−θ1')
【0088】
なお、本実施形態では、トップテーブルが単純なテーブル形式である場合について説明したが、各テーブル間の座標を1次補完する方式や、多項式を用いた曲面補正式などでも同じ効果が得られる。いずれの方式を採用しても、第一の実施形態に比べると飛躍的に位置決め精度が向上できるため、比較的位置決め精度の高い要求がある装置に対しても十分対応可能となる。また、観察点(SEM中心とウエハの交点)からのレーザ光軸距離が最も離れることで、アッベ誤差が大きくなるヨーイングに焦点を絞って測長軸を追加しているが、この他にピッチング、ローリングについても応用でき、これらについても一定の改善効果を得ることができる。
【0089】
<第4の実施形態>
次に、本発明の第4の実施形態について、図10を参照しつつ説明する。ここでは、第1〜第3の実施形態で用いた試料室内のミラー49に代えて、光ファイバによって干渉計にレーザ光を導入することを特徴とする。
【0090】
(レーザ測長器の構成および動作)
レーザヘッド40から照射されるレ−ザ光を2経路に分割する分光ユニット43は、ビームスプリッタ41、ミラー49、集光レンズ43A、光ファイバ接続部43Bにより構成される。なお、本実施形態では2軸に分光しているが、同様の構成により、更に多くの軸数でも対応可能である。
【0091】
分光ユニット43には光ファイバ48が接続され、試料室2に設けられた照射側フィードスルー44の大気側に接続される。その後、照射側フィードスルー44の真空側から再度光ファイバが接続され、X取付け台57X、及びY取付け台57Yまで引回され、照射ユニット46へ接続される。
【0092】
照射ユニット46は、図示しないコリメートレンズと、光ファイバ接続部品により形成できるが、特許文献1で示されるような2周波レーザを別個の光ファイバにて導入し、照射ユニット内にて偏光スプリッタにより2周波レーザとして合成した後、干渉計へ照射することも可能である。
【0093】
X干渉計23X、及びY干渉計23Yは、ウエハ10の軸中心に一致するよう配置されており、照射ユニット46と各々の干渉計の位置関係はアライメントされて、ファイバを接続するだけで干渉計への適切な入射角と位置が確保できる。
【0094】
トップテーブル21Aに配置されるX反射鏡26X、及びY反射鏡26Yに入反射したレーザ光を受光する受光ピックアップ47は、光ファイバにて受光側フィードスルーの真空側に接続される。なお、受光ピックアップには、図示しない集光レンズが入口に実装されており、レーザ光を光ファイバーに導入する機能を有している。その後、照射側フィードスルー44の大気側から再度光ファイバ48が接続され、レシーバ42に接続され、電気信号に変換され、レーザユニット75へと伝達されて、位置情報へと変換される。
【0095】
本実施形態では、照明ユニット、受光ピックアップ、干渉計を分離して表記しているが、これらを1ユニットとして構成することも可能であり、このような一体型の構成にすることで、コンパクト化と取付け容易性向上が実現できる。ここで、真空側の光ファイバについては、放出ガスによる汚染を低減するために、被覆は四フッ化エキレン樹脂のような低アウトガス材料が好ましい。また、光ファイバにダメージが出ない程度の温度(例えば80℃)にて真空脱ガスを実施してから実装すると更に放出ガスの発生量を低減させることができる。また、光ファイバのフィードスルーを照射側と受光側に分けているが、装置レイアウトによっては、測長軸毎に、照射用の光ファイバと受光用の光ファイバを接続できるフィードスルーに分けても良い。または、全ての照射用の光ファイバと受光用の光ファイバを接続できる一個のフィードスルーでも良い。
【0096】
従来、特許文献1のようなトップテーブル上の干渉計へ光ファイバを導入したとしても、2次元平面を移動するトップテーブルへ光ファイバを引回す必要があるため、光学経路が煩雑化する。また、光ファイバの長さが長くなると、光ファイバの被覆に用いられる樹脂が揮発することで発生する放出ガスも増加し、真空内処理装置の真空度への影響も問題となる。
【0097】
しかしながら、本実施形態では上記構成により、真空中で可動する光ファイバをトップテーブルまで引回すことなく、短い長さで実装することができる。これにより、光ファイバの被覆に使用される樹脂の量を少なくすることができるため、放出ガスの発生量を低減させることができる。
【0098】
また、本実施形態の光ファイバは、X方向またはY方向どちらか1次元方向へ可動すれば足りるため、引回しが容易である。これにより、折れ、擦れなどの光ファイバへのダメージも低減できる。
【0099】
<まとめ>
本実施形態では、従来トップテーブル21Aに設置していたバーミラーまたは干渉計を除去し、トップテーブル21AにX反射鏡26XとY反射鏡26Yを設置する。また、X干渉計23XとY干渉計23Yは、Xスライダ21XとYスライダ21Yに設置する。
【0100】
このような構成により、トップテーブルの小型化、軽量化を実現でき、ステージ移動速度、加速度を向上させることができる。これにより、ステージ移動時間を減少させ、半導体製品のスループットを向上させることができる。また、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0101】
また、本実施形態では、カラム近傍の試料室内壁上部に、参照鏡としてバーミラーを取り付ける。
【0102】
このような構成により、温度傾斜により試料室2の外周壁に光学カラム1との温度差が生じても、カラム近傍の温度でステージ位置を測定できる。別の言い方をすれば、熱膨張により試料室2の外周が伸縮しても、バーミラーの歪み等の影響を減少させることができる。
【0103】
また、干渉計が実装されるXスライダ21X、及びYスライダ21Yに、移動方向と直交方向に歪みが生じる場合、またはXガイド28X、及びYガイド28Yのガイド剛性が小さく、歪みが大きい場合でも、干渉計の位置変動が測長誤差に含まれない。よって、ステージ振動、位置決め精度への影響を軽減でき、優れた動特性が得られることになる。
【0104】
また、本実施形態では、X1干渉計23X1に加えて、23X2をXスライダ21Xに取り付ける。
【0105】
このような構成により、X反射鏡26Xを搭載するトップテーブルを小さく構成しながらも、X方向の測長軸をもう1軸追加することができ、ヨーイング計測が可能となる。これにより、試料室内寸を小さくでき、装置コスト、ならびにフットプリントの低減が可能となる。また、トップテーブルのヨーイングを常に測定できるため、ステージ位置とヨーイング不再現量を元に位置補正が可能となる。
【0106】
また、本実施形態では、スライダに取り付けられた干渉計に、光ファイバを用いてレーザ光を導入する。
【0107】
このような構成により、光ファイバをトップテーブルまで引回すことなく、短い長さで実装することができる。これにより、光ファイバの被覆に使用される樹脂の量を少なくすることができるため、放出ガスの発生量を低減させることができる。また、本実施形態の光ファイバは、X方向またはY方向どちらか1次元方向へ可動すれば足りるため、引回しが容易である。これにより、折れ、擦れなどの光ファイバへのダメージも低減できる。
【0108】
この場合、光ファイバの被覆は四フッ化エキレン樹脂であれば、さらに放出ガスの発生量を低減させることができる。
【符号の説明】
【0109】
1・・・カラム、2・・・試料室、3・・・ロードロック、4・・・マウント、5・・・真空ポンプ、6・・・架台、7・・・干渉計容器、10・・・ウエハ、11・・・電子銃、12・・・電子線、13・・・電子レンズ、14・・・偏向器、14A・・・位置偏向器、14B・・・走査偏向器、15・・・検出器、16・・・電子レンズ、17・・・偏向制御部、21・・・ステージ、21A・・・トップテーブル、21B・・・連結ベース、21C・・・連結柱、21X・・・Xスライダ、21Y・・・Yスライダ、22・・・バーミラー、22X・・・Xバーミラー、22Y・・・Yバーミラー、23・・・干渉計、23X・・・X干渉計、23X1・・・X1干渉計、23X2・・・X2干渉計、23Y・・・Y干渉計、24・・・静電チャック、25・・・Zセンサ、26・・・反射鏡、26X・・・X反射鏡、26Y・・・Y反射鏡、27X・・・Xスライダガイド、27Y・・・Yスライダガイド、28X・・・Xガイド、28Y・・・Yガイド、29X・・・X取付けスペーサ、29Y・・・Y取付けスペーサ、31・・・搬送ロボット、32・・・真空側ゲートバルブ、33・・・大気側ゲートバルブ、40・・・レーザヘッド、41・・・ビームスプリッタ、42・・・レシーバ、43・・・分光ユニット、43A・・・集光レンズ、43B・・・光ファイバ接続部、44・・・照射側フィードスルー、45・・・受光側フィードスルー、46・・・照射ユニット、47・・・受光ピックアップ、48・・・光ファイバ、49・・・ミラー、51・・・ミラー台、52・・・ネジ受け、53・・・調整ネジ、54・・・押付けピン、55・・・押しバネ、56・・・透過窓、57X・・・X取付け台、57Y・・・Y取付け台、60・・・SEM中心、61・・・OM中心、70・・・カラム制御部、71・・・位置制御部、72・・・ステージ制御部、73・・・画像制御部、74・・・モニタ、75・・・レーザユニット
【特許請求の範囲】
【請求項1】
真空試料室と、当該真空試料室内に格納された試料ステージとを有する真空内処理装置であって、
前記試料ステージに設けられ、互いに交差する第1の移動軸および第2の移動軸に沿って移動できるよう配置されたトップテーブルと、
一方が前記トップテーブル上に配置され、かつ他方が前記トップテーブルとは離間されて配置された一対の光反射手段および第1の干渉計と、
前記第1の干渉計に対して光を導入する手段と、
前記第1の干渉計の出力光を検出するレシーバとを備え、
前記一対の光反射手段および第1の干渉計は、前記第1の移動軸に対して平行に配置され、かつ、当該一対の光反射手段および第1の干渉計が、互いに対向する位置関係を保ったまま前記第2の移動軸に沿って移動可能であることを特徴とする真空内処理装置。
【請求項2】
請求項1に記載の真空内処理装置において、
前記一対の光反射手段および第1の干渉計が、前記第1の移動軸と平行な方向に少なくとも一つ、かつ前記第2の移動軸と平行な方向に少なくとも一つ備えられたことを特徴とする真空内処理装置。
【請求項3】
請求項1に記載の真空内処理装置において、
前記光反射手段と対向する位置に配置された第2の干渉計を有し、
前記光反射手段、前記第1の干渉計および第2の干渉計からなる組が、前記第2の移動軸と平行な軸方向に移動可能であることを特徴とする真空内処理装置。
【請求項4】
請求項1に記載の真空内処理装置において、
前記光を前記干渉計に導入、導出する光ファイバと、
該光ファイバを大気中から真空中へ導入するフィードスルーとを備えることを特徴とする真空内処理装置。
【請求項5】
請求項4に記載の真空内処理装置において、
前記光ファイバは、四フッ化エキレン樹脂を含む被覆を備えることを特徴とする真空内処理装置。
【請求項6】
請求項1に記載の真空内処理装置において、
前記真空試料室の天井壁面に取り付けられたバーミラーを有し、
当該バーミラーの長手方向が前記第2の移動軸と平行であることを特徴とする真空内処理装置。
【請求項7】
真空室内で、XY水平面を移動するトップテーブルの位置をレーザ光により測長する真空内処理装置において、
前記トップテーブルに取り付けられ、前記トップテーブルをY軸方向にスライドさせるX軸スライダと、
前記トップテーブルに取り付けられ、前記トップテーブルをX軸方向にスライドさせるY軸スライダと、
前記X軸スライダおよびY軸スライダを駆動して前記トップテーブルを所望の位置に移動するステージ制御部と、
前記X軸スライダに取り付けられ、前記X軸スライダと連動してY軸を平行移動し、前記レーザ光を受光して干渉光を生成するX干渉計と、
前記Y軸スライダに取り付けられ、前記Y軸スライダと連動してX軸を平行移動し、前記レーザ光を受光して干渉光を生成するY干渉計と、
前記トップテーブルに設置され、前記X干渉計と同じY軸上に位置し、前記干渉光を反射するX反射鏡と、
前記トップテーブルに設置され、前記Y干渉計と同じX軸上に位置し、前記干渉光を反射するY反射鏡と、
を有することを特徴とする真空内処理装置。
【請求項1】
真空試料室と、当該真空試料室内に格納された試料ステージとを有する真空内処理装置であって、
前記試料ステージに設けられ、互いに交差する第1の移動軸および第2の移動軸に沿って移動できるよう配置されたトップテーブルと、
一方が前記トップテーブル上に配置され、かつ他方が前記トップテーブルとは離間されて配置された一対の光反射手段および第1の干渉計と、
前記第1の干渉計に対して光を導入する手段と、
前記第1の干渉計の出力光を検出するレシーバとを備え、
前記一対の光反射手段および第1の干渉計は、前記第1の移動軸に対して平行に配置され、かつ、当該一対の光反射手段および第1の干渉計が、互いに対向する位置関係を保ったまま前記第2の移動軸に沿って移動可能であることを特徴とする真空内処理装置。
【請求項2】
請求項1に記載の真空内処理装置において、
前記一対の光反射手段および第1の干渉計が、前記第1の移動軸と平行な方向に少なくとも一つ、かつ前記第2の移動軸と平行な方向に少なくとも一つ備えられたことを特徴とする真空内処理装置。
【請求項3】
請求項1に記載の真空内処理装置において、
前記光反射手段と対向する位置に配置された第2の干渉計を有し、
前記光反射手段、前記第1の干渉計および第2の干渉計からなる組が、前記第2の移動軸と平行な軸方向に移動可能であることを特徴とする真空内処理装置。
【請求項4】
請求項1に記載の真空内処理装置において、
前記光を前記干渉計に導入、導出する光ファイバと、
該光ファイバを大気中から真空中へ導入するフィードスルーとを備えることを特徴とする真空内処理装置。
【請求項5】
請求項4に記載の真空内処理装置において、
前記光ファイバは、四フッ化エキレン樹脂を含む被覆を備えることを特徴とする真空内処理装置。
【請求項6】
請求項1に記載の真空内処理装置において、
前記真空試料室の天井壁面に取り付けられたバーミラーを有し、
当該バーミラーの長手方向が前記第2の移動軸と平行であることを特徴とする真空内処理装置。
【請求項7】
真空室内で、XY水平面を移動するトップテーブルの位置をレーザ光により測長する真空内処理装置において、
前記トップテーブルに取り付けられ、前記トップテーブルをY軸方向にスライドさせるX軸スライダと、
前記トップテーブルに取り付けられ、前記トップテーブルをX軸方向にスライドさせるY軸スライダと、
前記X軸スライダおよびY軸スライダを駆動して前記トップテーブルを所望の位置に移動するステージ制御部と、
前記X軸スライダに取り付けられ、前記X軸スライダと連動してY軸を平行移動し、前記レーザ光を受光して干渉光を生成するX干渉計と、
前記Y軸スライダに取り付けられ、前記Y軸スライダと連動してX軸を平行移動し、前記レーザ光を受光して干渉光を生成するY干渉計と、
前記トップテーブルに設置され、前記X干渉計と同じY軸上に位置し、前記干渉光を反射するX反射鏡と、
前記トップテーブルに設置され、前記Y干渉計と同じX軸上に位置し、前記干渉光を反射するY反射鏡と、
を有することを特徴とする真空内処理装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−154958(P2011−154958A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−16971(P2010−16971)
【出願日】平成22年1月28日(2010.1.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月28日(2010.1.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]