
真空処理システム用圧力制御
圧力制御システムは、圧力センサと圧力コントローラとの間に、ディジタル通信ネットワークを含む。ディジタル通信ネットワークは、圧力センサと圧力コントローラとの間で信号を伝達するように構成されている。圧力センサは、処理ツールの中にある圧力チャンバ内部の圧力を測定するように構成されている。圧力コントローラは、圧力センサによって取り込まれディジタル通信ネットワークを通じて圧力コントローラに伝達される圧力測定値に応答して、真空チャンバ内の圧力を、ツールから受信した圧力設定点に維持するように、真空チャンバ内部の圧力を制御する。
【発明の詳細な説明】
【背景技術】
【0001】
半導体処理ツールのような処理ツール用の圧力コントローラは、通例、実際の圧力の測定値に応答して、そのようなツールの中にある1つ以上の真空チャンバにおける圧力制御を行う。現在、これらの圧力コントローラと、圧力測定を実際に行う圧力センサとの間において圧力信号を伝達するために、アナログ通信リンクが用いられている。
【0002】
アナログ通信リンクを用いて圧力信号を送信する場合、アナログ信号の受信端においてフィルタ処理が必要となる。このために、システムの帯域幅が減少し、特に時定数が速い真空システムにおいて、圧力制御性能が制限される可能性がある。また、理想的でない接地によるノイズも、圧力制御システムにおいてアナログ信号を圧力センサと圧力コントローラとの間で交換する際に問題となる可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これらの悪影響を回避することができる圧力制御システムおよび方法が求められている。
【課題を解決するための手段】
【0004】
ツール用圧力制御システムは、圧力センサと圧力コントローラとの間にディジタル通信ネットワークを含む。ディジタル通信ネットワークは、圧力センサと圧力コントローラとの間において信号を伝達するように構成されている。圧力センサは、ツールの中にある真空チャンバ内部の圧力を測定するように構成されている。圧力コントローラは、圧力センサが取り込みディジタル通信ネットワークを通じて圧力コントローラに伝達される圧力測定値に応答して、真空チャンバ内の圧力を、ツールから受信した圧力設定点に維持するように、真空チャンバ内部の圧力を制御する。
【0005】
ツールの中にある真空チャンバ内の圧力を制御する方法は、真空チャンバ内の圧力を測定するステップと、ツールから真空チャンバに対する圧力設定点を受信するステップと、圧力測定値および圧力設定点をディジタル通信ネットワークを通じて圧力コントローラに伝達するステップとを含む。更に、本方法は、受信した圧力測定値および圧力設定点に応答して、真空チャンバ内の圧力を圧力設定点に維持するように、真空チャンバ内の圧力を制御するステップも含む。
【図面の簡単な説明】
【0006】
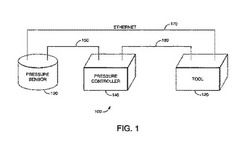
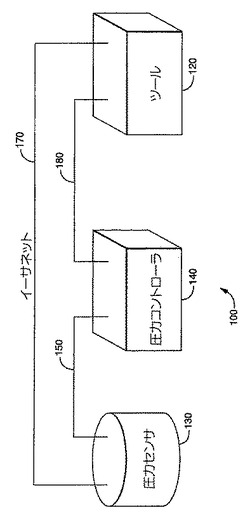
【図1】図1は、本開示の一実施形態にしたがって、ディジタル・ネットワークを用いて圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、真空処理チャンバにおける圧力を制御する圧力制御システムを示す。
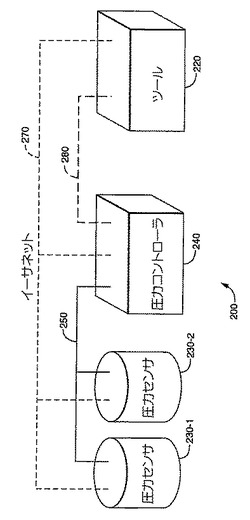
【図2】図2は、本開示の別の実施形態にしたがって、ディジタル・ネットワークを用いて1対の圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、真空処理チャンバにおける圧力を制御する圧力制御システムを示す。
【発明を実施するための形態】
【0007】
圧力の測定を行う圧力センサと、これらの圧力測定値に応答して圧力を所望の設定点に制御する圧力コントローラとの間にディジタル通信リンクを設ける真空圧力制御システムおよび方法を開示する。ディジタル通信リンクを用いて圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、半導体処理ツールのようなシステムに現れることが多く圧力制御に悪影響を及ぼす接地ノイズに対する耐性を得ることができる。更に、圧力測定および制御の有効ダイナミック・レンジも拡大することができる。
【0008】
図1は、本開示の一実施形態にしたがって、ディジタル・ネットワーク150を用いて圧力センサ130と圧力コントローラ140との間で圧力信号を伝達することによって、ツール120における圧力を制御する圧力制御システム100を示す。ツール120は、一例として、半導体処理ツールとすることができるが、他の種類の処理ツールも、本開示の範囲に該当する。
【0009】
ディジタル通信ネットワーク150は、双方向(即ち、二方向)ネットワークとするとよく、圧力センサ130と圧力コントローラ140との間における圧力関係信号およびメッセージの二方向伝達が可能になる。あるいは、通信ネットワーク150は一方向ネットワークでもよく、その場合圧力関係通信は1方向のみで行うことができ、別の方向に沿った送信は、ゼロ点調節(zeroing)およびエラー・ステータスのような、管理維持機能のためだけに逆方向に行われる。
【0010】
圧力センサ130は、ツール120の中にある1つ以上の真空チャンバ内部における圧力を測定する。圧力センサ130は、本開示の一実施形態では、容量系圧力変換器とすることができるが、他の形式の圧力変換器も本開示の範囲に該当する。例えば、圧力センサ130は、MSK Instruments, Inc.が製造するbaratron(バラトロン)とするとよい。
【0011】
圧力コントローラ140は、ディジタル通信ネットワーク150を通じて、圧力センサ130から、圧力センサ130による圧力測定値を収容した信号を受信する。また、圧力コントローラ140は、ツール120からの所望の圧力設定点も受信する。所望の圧力設定点は、通例、ツール120内部にあるツール・コントローラ(図示せず)によって送られる。受信した圧力測定信号および圧力設定点に応答して、圧力コントローラ140は、ツール120から受信した所望の圧力設定点に圧力を維持するように、真空チャンバ(群)内における圧力を制御する。通例、圧力コントローラ140は、真空チャンバに流入または流出する流体の流量を制御することによって、真空チャンバ内の圧力を制御するように開弁および閉弁する弁を含む。
【0012】
ディジタル通信ネットワーク150は、システム100による圧力制御のための閉ループ・センサ・フィードバックを可能にする。ディジタル通信ネットワーク150は、一例として、CAN(制御エリア・ネットワーク)のような、プライベートネットワークでもよい。一般に、システムディジタル・ネットワークは、規則的、周期的な間隔で、非常に信頼性の高いパケット送信に対処する。尚、CANネットワークが約10msec以上の更新率で信号伝達を可能にすることが望ましい。
【0013】
圧力制御システム100の目的上、ディジタル通信ネットワーク150が分離ネットワークであり、他のいずれのネットワーク、およびこれらのネットワークにおいて行われている他のいずれのプロセスからの干渉も実質的に受けずに、信号を伝達できることが望ましい。このようにすれば、ディジタル通信ネットワーク150は、実質的にノイズのない信号を決定論的に送信することができる。
【0014】
CANのような、分離したプライベートディジタル通信ネットワーク150が望ましい場合もあるが、実施形態によっては、ディジタル通信ネットワーク150が以下の内1つ以上を含んでもよい。イーサネット(登録商標)TCP(送信制御プロトコル)/IP(インターネット・プロトコル)、DeviceNet、CAN(コントローラ・エリア・ネットワーク)、UDP/IP(ユーザ・データグラム・プロトコル/インターネット・プロトコル)、RS(推奨規格)−232、およびRS(推奨規格)−485。
【0015】
圧力コントローラ140は、ツール・レベル通信リンク180を通じて、ツール120から制御信号(圧力設定点のような)を受信することができる。このリンク180は、限定ではなく、Dnet、RS232、およびイーサネット(登録商標)を含むことができるシステムを用いて、実現することができる。
【0016】
圧力センサ130とツール120との間における通信は、別個のツール・レベル通信リンク170を通じても行うことができる。図1はこのネットワーク170をイーサネット(登録商標)として図示するが、イーサネット(登録商標)以外の通信ネットワークもツール・レベル通信リンク170を実現するために用いることができる。通例、システム診断情報に関係する信号は、ツール・レベル・リンク170を通じて伝達するとよい。
【0017】
これらの信号は、限定ではないが、以下のもの、即ち、圧力センサ130の較正および/またはゼロ点調節、圧力センサ130のダイナミック・レンジ、ならびに圧力制御システム100の診断情報を含む情報および/またはコマンドを収容することができる。診断情報は、限定ではないが、圧力センサのヒータ温度、圧力センサ130におけるダイアフラムの短絡(shorting)、圧力センサ130の内部障害、圧力センサ130の累積ドリフト、圧力センサのゼロ点調節範囲、および圧力センサ130による最大目盛り範囲の超過を含む係数に関するものとすればよい。
【0018】
前述の閉ループ・センサ・フィードバック・システムは、圧力センサ130からの入力をサポートすること以外にも、追加のセンサ入力をサポートするように構成することができる。例えば、圧力制御システム100は、圧力コントローラ140に流量変化フィードフォーワード信号を供給するFRC(流量率(flow ratio)コントローラ)からの出力を受信するように構成することもできる。
【0019】
圧力測定信号以外の信号、例えば、前述の診断情報も、本開示の一実施形態では、ディジタル通信ネットワーク170を通じて圧力センサ130と圧力コントローラ140との間で伝達することができる。
【0020】
図2は、本開示の別の実施形態にしたがって、ツール200内にある1つ以上の真空処理チャンバにおける圧力を制御する圧力制御システム200を示す。図2に示す実施形態は、図1に示した実施形態と比較して、同様に動作するが、システム200では、1対の圧力センサ(230−1および230−2として示す)と圧力コントローラ240との間において圧力信号を伝達するためにディジタル・ネットワーク250を用いることを除く。図2に示すセンサは2つだけであるが、一般に、ディジタル・ネットワーク250に接続することができる圧力センサの数Nは可変とすることができる。即ち、ユーザは所望数の圧力センサ230−1、230−2、...、230−iをディジタル・ネットワーク250に対して追加/除去する柔軟性を得ることができる。
【0021】
ディジタル通信ネットワークがCANネットワークである一実施形態では、圧力測定値、診断、およびその他の情報を収容する信号のためのパケット送信は、以下に説明するように、1つ以上の方法で行うことができる。
【0022】
一例では、圧力センサ(群)はメッセージを圧力コントローラに送出することができる。プロトコルの一例は、技術的に、圧力センサから10ms毎にブロードキャストされるCANグループ1メッセージID0で構成することができる。メッセージ識別子は、サイズが大きな符号なし整数型(unsigned long)で、最下位の6ビットが送出側圧力センサ(230−1および230−2として図示する)のMacIDとすることができる。用いられない他のビットは、全て0にセットしておけばよい。これによって、生成されるグループ1メッセージには、通常(グループ2)デバイスネット通信が存在しても、そのいずれよりも高い優先順位を与えるとよい。また、これによって、追加の作業を必要とせず、圧力センサのメッセージ同士間における調停も、下位レベルのドライバによって確実に扱うことができる。
【0023】
この例では、メッセージの中にある1つのパケットは、メッセージID、データ長である9、それに続くデータ自体を収容することができる。Torr単位の読み取り値は、4バイト浮動小数点数値として表すことができる。Torr単位の最大メモリは、4バイト浮動小数点値として表すことができる。ステータスは、8ビット符号なし整数として表すことができる。
【0024】
ステータス指示ビットは、限定ではなく、以下を含むことができる。
【0025】
0) 制御温度におけるヒータ
【0026】
1) ゼロ点調節範囲内の圧力
【0027】
2)ダイアフラムの短絡
【0028】
3) 最大目盛り範囲の110%を超えているe-Baratron
【0029】
4) 20%以上のゼロ点調節(これ以上のゼロ点調節は許容されない)
【0030】
5) e-Baratronの内部障害(ヒータ回路損傷、仕様を外れた電源というような理由のため)
【0031】
6)範囲を超えた累積ドリフト
【0032】
7)この時点では未使用
【0033】
0および1ビットがゼロ点調整に必要となる場合もある。
【0034】
圧力制御弁におけるDeviceNetドライバは、通常のMacIDフィルタ処理を不能にするように修正することができる。弁のMacIDを有していないメッセージは、通常、受信時に欠落させることができる。この例では、他のMacIDを有するメッセージは、Baratronからの読み取り値である。MacIDは、どの圧力センサが高範囲チャネルであり、どれが低範囲チャネルであるか判断するために用いられる。未使用のMacIDを有するメッセージは、欠落させる。例えば、弁におけるデフォルトでは、低チャネルに対してMacID1、高チャネルに対してMacID2とすればよい。これらの値は、弁においてそして圧力センサ上で変更することができる。
【0035】
データは、圧力制御弁上で読み取り、ADC(アナログ/ディジタル変換器)が読み取る代わりに用いることができる。ADC較正データを用いて、Torr圧力/範囲読み取り値を、シミュレーションによるADC生カウントに変換することができる。
【0036】
最大目盛り範囲は、変換器に対する弁の範囲がパケットの内容と一致しない場合、自動的に更新することができる。また、交差点(crossover point)もしかるべく調節することができる。
【0037】
別の状況では、メッセージは、例えば、圧力センサの1つ以上のゼロ点調節を起動するために、圧力コントローラ140において弁によって発生することもできる。メッセージ識別子は、サイズが大きな符号なし整数型で、最下位の6ビットが命令されたbaratronのMacIDとなるようにするとよい。ビット6は、1にセットすることができるが、他の全ての(未使用)ビットは、0にセットすればよい。これによって、グループ1メッセージID1が得られる。圧力センサのMacIDがメッセージと一致するときに、ゼロ点調節を行うことができる。従前からの0(0%を想定)が必要とされる場合でも、0%のデフォルト目標値を供給することができる。
【0038】
この例では、メッセージ・パケットは、メッセージID、データ長である4、次いでデータ自体を収容することができる。ゼロ目標は、4ビット浮動小数点数値として、最大目盛りの割合で表すことができる。
【0039】
上の例では、Baratronのインターフェースに追加するコマンドは、限定ではなく、以下を含むことができる。
【0040】
ディジタルBaratronモード入力
【0041】
baratronのMacID取得/設定
【0042】
制御弁のシリアル・インターフェースに追加するコマンドは、限定ではなく、以下を含むことができる。
【0043】
ディジタルbaratronモード入力
【0044】
高または低チャネル圧力センサのMacIC取得/設定
【0045】
高または低チャネル圧力センサのステータス報告
【0046】
目標値を用いたまたは用いない、高または低チャネル圧力センサ上におけるゼロ点調節実行
【0047】
要約すれば、1つ以上の圧力センサと圧力コントローラとの間にディジタル通信リンクを設け、10msec以上の更新率で、圧力センサと圧力コントローラとの間でノイズがなく、ダイナミック・レンジが高い信号を供給するシステムおよび方法について説明した。ディジタル通信リンクによって、圧力制御の安定性を高め、ダイナミック・レンジを広げることが可能になる。
【0048】
以上、真空処理システムにおいて圧力を制御するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示する概念は、他の実施形態でも同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみによって限定されるものとする。
【0049】
これらの特許請求の範囲において、単数である要素に言及する場合、具体的にそのように述べていない限り、「1つだけ」を意味するのではなく「1つ以上」を意味することを意図している。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる全ての構造的および機能的同等物は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれも、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。特許請求の範囲の要素は、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、そのいずれも35U.S.C.§112、第6節の規定にしたがって解釈しないこととする。
【背景技術】
【0001】
半導体処理ツールのような処理ツール用の圧力コントローラは、通例、実際の圧力の測定値に応答して、そのようなツールの中にある1つ以上の真空チャンバにおける圧力制御を行う。現在、これらの圧力コントローラと、圧力測定を実際に行う圧力センサとの間において圧力信号を伝達するために、アナログ通信リンクが用いられている。
【0002】
アナログ通信リンクを用いて圧力信号を送信する場合、アナログ信号の受信端においてフィルタ処理が必要となる。このために、システムの帯域幅が減少し、特に時定数が速い真空システムにおいて、圧力制御性能が制限される可能性がある。また、理想的でない接地によるノイズも、圧力制御システムにおいてアナログ信号を圧力センサと圧力コントローラとの間で交換する際に問題となる可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これらの悪影響を回避することができる圧力制御システムおよび方法が求められている。
【課題を解決するための手段】
【0004】
ツール用圧力制御システムは、圧力センサと圧力コントローラとの間にディジタル通信ネットワークを含む。ディジタル通信ネットワークは、圧力センサと圧力コントローラとの間において信号を伝達するように構成されている。圧力センサは、ツールの中にある真空チャンバ内部の圧力を測定するように構成されている。圧力コントローラは、圧力センサが取り込みディジタル通信ネットワークを通じて圧力コントローラに伝達される圧力測定値に応答して、真空チャンバ内の圧力を、ツールから受信した圧力設定点に維持するように、真空チャンバ内部の圧力を制御する。
【0005】
ツールの中にある真空チャンバ内の圧力を制御する方法は、真空チャンバ内の圧力を測定するステップと、ツールから真空チャンバに対する圧力設定点を受信するステップと、圧力測定値および圧力設定点をディジタル通信ネットワークを通じて圧力コントローラに伝達するステップとを含む。更に、本方法は、受信した圧力測定値および圧力設定点に応答して、真空チャンバ内の圧力を圧力設定点に維持するように、真空チャンバ内の圧力を制御するステップも含む。
【図面の簡単な説明】
【0006】
【図1】図1は、本開示の一実施形態にしたがって、ディジタル・ネットワークを用いて圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、真空処理チャンバにおける圧力を制御する圧力制御システムを示す。
【図2】図2は、本開示の別の実施形態にしたがって、ディジタル・ネットワークを用いて1対の圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、真空処理チャンバにおける圧力を制御する圧力制御システムを示す。
【発明を実施するための形態】
【0007】
圧力の測定を行う圧力センサと、これらの圧力測定値に応答して圧力を所望の設定点に制御する圧力コントローラとの間にディジタル通信リンクを設ける真空圧力制御システムおよび方法を開示する。ディジタル通信リンクを用いて圧力センサと圧力コントローラとの間で圧力信号を伝達することによって、半導体処理ツールのようなシステムに現れることが多く圧力制御に悪影響を及ぼす接地ノイズに対する耐性を得ることができる。更に、圧力測定および制御の有効ダイナミック・レンジも拡大することができる。
【0008】
図1は、本開示の一実施形態にしたがって、ディジタル・ネットワーク150を用いて圧力センサ130と圧力コントローラ140との間で圧力信号を伝達することによって、ツール120における圧力を制御する圧力制御システム100を示す。ツール120は、一例として、半導体処理ツールとすることができるが、他の種類の処理ツールも、本開示の範囲に該当する。
【0009】
ディジタル通信ネットワーク150は、双方向(即ち、二方向)ネットワークとするとよく、圧力センサ130と圧力コントローラ140との間における圧力関係信号およびメッセージの二方向伝達が可能になる。あるいは、通信ネットワーク150は一方向ネットワークでもよく、その場合圧力関係通信は1方向のみで行うことができ、別の方向に沿った送信は、ゼロ点調節(zeroing)およびエラー・ステータスのような、管理維持機能のためだけに逆方向に行われる。
【0010】
圧力センサ130は、ツール120の中にある1つ以上の真空チャンバ内部における圧力を測定する。圧力センサ130は、本開示の一実施形態では、容量系圧力変換器とすることができるが、他の形式の圧力変換器も本開示の範囲に該当する。例えば、圧力センサ130は、MSK Instruments, Inc.が製造するbaratron(バラトロン)とするとよい。
【0011】
圧力コントローラ140は、ディジタル通信ネットワーク150を通じて、圧力センサ130から、圧力センサ130による圧力測定値を収容した信号を受信する。また、圧力コントローラ140は、ツール120からの所望の圧力設定点も受信する。所望の圧力設定点は、通例、ツール120内部にあるツール・コントローラ(図示せず)によって送られる。受信した圧力測定信号および圧力設定点に応答して、圧力コントローラ140は、ツール120から受信した所望の圧力設定点に圧力を維持するように、真空チャンバ(群)内における圧力を制御する。通例、圧力コントローラ140は、真空チャンバに流入または流出する流体の流量を制御することによって、真空チャンバ内の圧力を制御するように開弁および閉弁する弁を含む。
【0012】
ディジタル通信ネットワーク150は、システム100による圧力制御のための閉ループ・センサ・フィードバックを可能にする。ディジタル通信ネットワーク150は、一例として、CAN(制御エリア・ネットワーク)のような、プライベートネットワークでもよい。一般に、システムディジタル・ネットワークは、規則的、周期的な間隔で、非常に信頼性の高いパケット送信に対処する。尚、CANネットワークが約10msec以上の更新率で信号伝達を可能にすることが望ましい。
【0013】
圧力制御システム100の目的上、ディジタル通信ネットワーク150が分離ネットワークであり、他のいずれのネットワーク、およびこれらのネットワークにおいて行われている他のいずれのプロセスからの干渉も実質的に受けずに、信号を伝達できることが望ましい。このようにすれば、ディジタル通信ネットワーク150は、実質的にノイズのない信号を決定論的に送信することができる。
【0014】
CANのような、分離したプライベートディジタル通信ネットワーク150が望ましい場合もあるが、実施形態によっては、ディジタル通信ネットワーク150が以下の内1つ以上を含んでもよい。イーサネット(登録商標)TCP(送信制御プロトコル)/IP(インターネット・プロトコル)、DeviceNet、CAN(コントローラ・エリア・ネットワーク)、UDP/IP(ユーザ・データグラム・プロトコル/インターネット・プロトコル)、RS(推奨規格)−232、およびRS(推奨規格)−485。
【0015】
圧力コントローラ140は、ツール・レベル通信リンク180を通じて、ツール120から制御信号(圧力設定点のような)を受信することができる。このリンク180は、限定ではなく、Dnet、RS232、およびイーサネット(登録商標)を含むことができるシステムを用いて、実現することができる。
【0016】
圧力センサ130とツール120との間における通信は、別個のツール・レベル通信リンク170を通じても行うことができる。図1はこのネットワーク170をイーサネット(登録商標)として図示するが、イーサネット(登録商標)以外の通信ネットワークもツール・レベル通信リンク170を実現するために用いることができる。通例、システム診断情報に関係する信号は、ツール・レベル・リンク170を通じて伝達するとよい。
【0017】
これらの信号は、限定ではないが、以下のもの、即ち、圧力センサ130の較正および/またはゼロ点調節、圧力センサ130のダイナミック・レンジ、ならびに圧力制御システム100の診断情報を含む情報および/またはコマンドを収容することができる。診断情報は、限定ではないが、圧力センサのヒータ温度、圧力センサ130におけるダイアフラムの短絡(shorting)、圧力センサ130の内部障害、圧力センサ130の累積ドリフト、圧力センサのゼロ点調節範囲、および圧力センサ130による最大目盛り範囲の超過を含む係数に関するものとすればよい。
【0018】
前述の閉ループ・センサ・フィードバック・システムは、圧力センサ130からの入力をサポートすること以外にも、追加のセンサ入力をサポートするように構成することができる。例えば、圧力制御システム100は、圧力コントローラ140に流量変化フィードフォーワード信号を供給するFRC(流量率(flow ratio)コントローラ)からの出力を受信するように構成することもできる。
【0019】
圧力測定信号以外の信号、例えば、前述の診断情報も、本開示の一実施形態では、ディジタル通信ネットワーク170を通じて圧力センサ130と圧力コントローラ140との間で伝達することができる。
【0020】
図2は、本開示の別の実施形態にしたがって、ツール200内にある1つ以上の真空処理チャンバにおける圧力を制御する圧力制御システム200を示す。図2に示す実施形態は、図1に示した実施形態と比較して、同様に動作するが、システム200では、1対の圧力センサ(230−1および230−2として示す)と圧力コントローラ240との間において圧力信号を伝達するためにディジタル・ネットワーク250を用いることを除く。図2に示すセンサは2つだけであるが、一般に、ディジタル・ネットワーク250に接続することができる圧力センサの数Nは可変とすることができる。即ち、ユーザは所望数の圧力センサ230−1、230−2、...、230−iをディジタル・ネットワーク250に対して追加/除去する柔軟性を得ることができる。
【0021】
ディジタル通信ネットワークがCANネットワークである一実施形態では、圧力測定値、診断、およびその他の情報を収容する信号のためのパケット送信は、以下に説明するように、1つ以上の方法で行うことができる。
【0022】
一例では、圧力センサ(群)はメッセージを圧力コントローラに送出することができる。プロトコルの一例は、技術的に、圧力センサから10ms毎にブロードキャストされるCANグループ1メッセージID0で構成することができる。メッセージ識別子は、サイズが大きな符号なし整数型(unsigned long)で、最下位の6ビットが送出側圧力センサ(230−1および230−2として図示する)のMacIDとすることができる。用いられない他のビットは、全て0にセットしておけばよい。これによって、生成されるグループ1メッセージには、通常(グループ2)デバイスネット通信が存在しても、そのいずれよりも高い優先順位を与えるとよい。また、これによって、追加の作業を必要とせず、圧力センサのメッセージ同士間における調停も、下位レベルのドライバによって確実に扱うことができる。
【0023】
この例では、メッセージの中にある1つのパケットは、メッセージID、データ長である9、それに続くデータ自体を収容することができる。Torr単位の読み取り値は、4バイト浮動小数点数値として表すことができる。Torr単位の最大メモリは、4バイト浮動小数点値として表すことができる。ステータスは、8ビット符号なし整数として表すことができる。
【0024】
ステータス指示ビットは、限定ではなく、以下を含むことができる。
【0025】
0) 制御温度におけるヒータ
【0026】
1) ゼロ点調節範囲内の圧力
【0027】
2)ダイアフラムの短絡
【0028】
3) 最大目盛り範囲の110%を超えているe-Baratron
【0029】
4) 20%以上のゼロ点調節(これ以上のゼロ点調節は許容されない)
【0030】
5) e-Baratronの内部障害(ヒータ回路損傷、仕様を外れた電源というような理由のため)
【0031】
6)範囲を超えた累積ドリフト
【0032】
7)この時点では未使用
【0033】
0および1ビットがゼロ点調整に必要となる場合もある。
【0034】
圧力制御弁におけるDeviceNetドライバは、通常のMacIDフィルタ処理を不能にするように修正することができる。弁のMacIDを有していないメッセージは、通常、受信時に欠落させることができる。この例では、他のMacIDを有するメッセージは、Baratronからの読み取り値である。MacIDは、どの圧力センサが高範囲チャネルであり、どれが低範囲チャネルであるか判断するために用いられる。未使用のMacIDを有するメッセージは、欠落させる。例えば、弁におけるデフォルトでは、低チャネルに対してMacID1、高チャネルに対してMacID2とすればよい。これらの値は、弁においてそして圧力センサ上で変更することができる。
【0035】
データは、圧力制御弁上で読み取り、ADC(アナログ/ディジタル変換器)が読み取る代わりに用いることができる。ADC較正データを用いて、Torr圧力/範囲読み取り値を、シミュレーションによるADC生カウントに変換することができる。
【0036】
最大目盛り範囲は、変換器に対する弁の範囲がパケットの内容と一致しない場合、自動的に更新することができる。また、交差点(crossover point)もしかるべく調節することができる。
【0037】
別の状況では、メッセージは、例えば、圧力センサの1つ以上のゼロ点調節を起動するために、圧力コントローラ140において弁によって発生することもできる。メッセージ識別子は、サイズが大きな符号なし整数型で、最下位の6ビットが命令されたbaratronのMacIDとなるようにするとよい。ビット6は、1にセットすることができるが、他の全ての(未使用)ビットは、0にセットすればよい。これによって、グループ1メッセージID1が得られる。圧力センサのMacIDがメッセージと一致するときに、ゼロ点調節を行うことができる。従前からの0(0%を想定)が必要とされる場合でも、0%のデフォルト目標値を供給することができる。
【0038】
この例では、メッセージ・パケットは、メッセージID、データ長である4、次いでデータ自体を収容することができる。ゼロ目標は、4ビット浮動小数点数値として、最大目盛りの割合で表すことができる。
【0039】
上の例では、Baratronのインターフェースに追加するコマンドは、限定ではなく、以下を含むことができる。
【0040】
ディジタルBaratronモード入力
【0041】
baratronのMacID取得/設定
【0042】
制御弁のシリアル・インターフェースに追加するコマンドは、限定ではなく、以下を含むことができる。
【0043】
ディジタルbaratronモード入力
【0044】
高または低チャネル圧力センサのMacIC取得/設定
【0045】
高または低チャネル圧力センサのステータス報告
【0046】
目標値を用いたまたは用いない、高または低チャネル圧力センサ上におけるゼロ点調節実行
【0047】
要約すれば、1つ以上の圧力センサと圧力コントローラとの間にディジタル通信リンクを設け、10msec以上の更新率で、圧力センサと圧力コントローラとの間でノイズがなく、ダイナミック・レンジが高い信号を供給するシステムおよび方法について説明した。ディジタル通信リンクによって、圧力制御の安定性を高め、ダイナミック・レンジを広げることが可能になる。
【0048】
以上、真空処理システムにおいて圧力を制御するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示する概念は、他の実施形態でも同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみによって限定されるものとする。
【0049】
これらの特許請求の範囲において、単数である要素に言及する場合、具体的にそのように述べていない限り、「1つだけ」を意味するのではなく「1つ以上」を意味することを意図している。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる全ての構造的および機能的同等物は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれも、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。特許請求の範囲の要素は、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、そのいずれも35U.S.C.§112、第6節の規定にしたがって解釈しないこととする。
【特許請求の範囲】
【請求項1】
圧力制御システムであって、
処理ツールの中にある真空チャンバ内部の圧力を測定するように構成されている圧力センサと、
前記真空チャンバ内部の圧力を制御するように構成されている圧力コントローラと、
前記圧力センサと前記圧力コントローラとの間にあるディジタル通信ネットワークであって、前記圧力センサと前記圧力コントローラとの間において信号を伝達するように構成されている、ディジタル通信ネットワークと、
を備えており、
前記圧力コントローラは、前記圧力センサが取り込み前記圧力コントローラに前記ディジタル通信ネットワークを通じて伝達された圧力測定値に応答して、前記真空チャンバ内の圧力を、前記処理ツールから受信した圧力設定点に維持するように、前記真空チャンバ内部の圧力を制御する、圧力制御システム。
【請求項2】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、プライベートディジタル通信ネットワークを備えている、圧力制御システム。
【請求項3】
請求項2記載の圧力制御システムにおいて、前記プライベートディジタル通信ネットワークは、周期的な時間間隔で行われるパケット通信を通じて信号を伝達するように構成されている、圧力制御システム。
【請求項4】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、他のいずれのネットワークからの干渉も実質的に受けずに、信号を送信するように構成されている、分離ディジタル通信ネットワークを備えている、圧力制御システム。
【請求項5】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、実質的にノイズがない信号を決定論的に送信するように構成されている、圧力制御システム。
【請求項6】
請求項1記載の圧力制御システムにおいて、前記処理ツールは、半導体処理ツールを備えている、圧力制御システム。
【請求項7】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、更に、前記圧力センサと前記圧力コントローラとの間において、前記圧力制御システムについての診断情報、前記圧力センサの較正およびゼロ点調節、ならびに前記圧力センサのダイナミック・レンジの内少なくとも1つに関する信号を伝達するように構成されている、圧力制御システム。
【請求項8】
請求項1記載の圧力制御システムにおいて、前記診断情報は、前記圧力センサのヒータ温度、前記圧力センサにおけるダイアフラムの短絡、前記圧力センサの内部障害、前記圧力センサの累積ドリフト、前記圧力センサのゼロ点調節範囲、および前記圧力センサにおける最大目盛り範囲の超過の内少なくとも1つに関係する、圧力制御システム。
【請求項9】
請求項1記載の圧力制御システムにいおて、前記ディジタル通信ネットワークは、約10msec以上の信号更新速度で、信号を伝達するように構成されている、圧力制御システム。
【請求項10】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、イーサネットTCP(送信制御プロトコル)/IP(インターネット・プロトコル)、DeviceNet、CAN(コントローラ・エリア・ネットワーク)、UDP/IP(ユーザ・データグラム・プロトコル/インターネット・プロトコル)、RS(推奨規格)−232、およびRS(推奨規格)−485の内少なくとも1つを備えている、圧力制御システム。
【請求項11】
請求項1記載の圧力制御システムにおいて、前記圧力センサは、容量系圧力変換器を備えている、圧力制御システム。
【請求項12】
請求項1記載の圧力制御システムであって、更に、前記ディジタル通信ネットワークに結合されている質量流量計を備えており、該質量流量コントローラは、前記真空チャンバに流入および流出する流体の流量を測定し、前記測定した流量を表す信号を前記圧力コントローラに送信するように構成されている、圧力制御システム。
【請求項13】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、
一方向に沿って圧力関係信号を伝達するように構成されている一方向通信ネットワークと、
2つの対向する方向に沿って圧力関係信号を伝達するように構成されている双方向通信ネットワークと、
の内少なくとも1つを備えている、圧力制御システム。
【請求項14】
圧力制御システムであって、
結合されているデバイスに信号を伝達するように構成されているディジタル通信ネットワークと、
前記ディジタル通信ネットワークに結合されている複数Nの圧力センサであって、各々、処理ツールの中にある真空チャンバ内部の圧力を測定するように構成されている、複数の圧力センサと、
前記ディジタル通信ネットワークに結合されている圧力コントローラであって、前記ツールから圧力設定点を受信し、前記受信した設定点と、各圧力センサが取り込み各圧力センサから前記圧力コントローラに前記ディジタル通信ネットワークを通じて伝達される圧力測定値とに応答して、前記真空チャンバ内部の圧力を制御することによって、前記真空チャンバ内の圧力を前記設定点に維持するように構成されている、圧力コントローラと、
を備えている、圧力制御システム。
【請求項15】
請求項14記載の圧力制御システムにおいて、前記圧力センサの数Nは可変である、圧力制御システム。
【請求項16】
請求項14記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、周期的な時間間隔で行われるパケット送信によって、前記信号を伝達するように構成されている、圧力制御システム。
【請求項17】
真空処理チャンバと、該真空処理チャンバに対する圧力設定点を供給する少なくとも1つの信号を含むツール制御信号を発生するように構成されているツール・コントローラとを含むツールと、
前記真空処理チャンバ内部の圧力を測定するように構成されている圧力センサと、
ディジタル通信ネットワークを通じて前記圧力センサに結合されている圧力コントローラであって、前記ディジタル・ネットワークを通じて前記圧力センサから受信した圧力測定値に応答して、更に前記ツール・コントローラによって供給される圧力設定点に応答して、前記真空チャンバ内部の圧力を制御することにより、前記真空チャンバ内の圧力を前記設定点に維持するように構成されている、圧力コントローラと、
を備えており、前記ディジタル通信ネットワークは、前記圧力センサと前記圧力コントローラとの間において圧力信号を伝達するように構成されている、システム。
【請求項18】
請求項17記載のシステムであって、更に、前記ツール・コントローラと前記圧力コントローラとの間にあるツール・レベル通信リンクを備えており、前記ツール・コントローラは、前記ツール・レベル通信リンクを通じて、前記圧力コントローラに前記圧力設定点を伝達するように構成されている、システム。
【請求項19】
ツールの中にある真空チャンバ内の圧力を制御する方法であって、
前記真空チャンバ内の圧力を測定するステップと、
前記ツールから、前記真空チャンバに対する圧力設定点を受信するステップと、
ディジタル通信チャネルを通じて、前記圧力測定値および前記圧力設定点を圧力コントローラに伝達するステップと、
前記圧力コントローラが、前記真空チャンバ内の圧力を前記設定点に維持するように、前記受信した圧力測定値および圧力設定点に応答して、前記圧力チャンバ内の圧力を制御するステップと、
を備えている、方法。
【請求項1】
圧力制御システムであって、
処理ツールの中にある真空チャンバ内部の圧力を測定するように構成されている圧力センサと、
前記真空チャンバ内部の圧力を制御するように構成されている圧力コントローラと、
前記圧力センサと前記圧力コントローラとの間にあるディジタル通信ネットワークであって、前記圧力センサと前記圧力コントローラとの間において信号を伝達するように構成されている、ディジタル通信ネットワークと、
を備えており、
前記圧力コントローラは、前記圧力センサが取り込み前記圧力コントローラに前記ディジタル通信ネットワークを通じて伝達された圧力測定値に応答して、前記真空チャンバ内の圧力を、前記処理ツールから受信した圧力設定点に維持するように、前記真空チャンバ内部の圧力を制御する、圧力制御システム。
【請求項2】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、プライベートディジタル通信ネットワークを備えている、圧力制御システム。
【請求項3】
請求項2記載の圧力制御システムにおいて、前記プライベートディジタル通信ネットワークは、周期的な時間間隔で行われるパケット通信を通じて信号を伝達するように構成されている、圧力制御システム。
【請求項4】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、他のいずれのネットワークからの干渉も実質的に受けずに、信号を送信するように構成されている、分離ディジタル通信ネットワークを備えている、圧力制御システム。
【請求項5】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、実質的にノイズがない信号を決定論的に送信するように構成されている、圧力制御システム。
【請求項6】
請求項1記載の圧力制御システムにおいて、前記処理ツールは、半導体処理ツールを備えている、圧力制御システム。
【請求項7】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、更に、前記圧力センサと前記圧力コントローラとの間において、前記圧力制御システムについての診断情報、前記圧力センサの較正およびゼロ点調節、ならびに前記圧力センサのダイナミック・レンジの内少なくとも1つに関する信号を伝達するように構成されている、圧力制御システム。
【請求項8】
請求項1記載の圧力制御システムにおいて、前記診断情報は、前記圧力センサのヒータ温度、前記圧力センサにおけるダイアフラムの短絡、前記圧力センサの内部障害、前記圧力センサの累積ドリフト、前記圧力センサのゼロ点調節範囲、および前記圧力センサにおける最大目盛り範囲の超過の内少なくとも1つに関係する、圧力制御システム。
【請求項9】
請求項1記載の圧力制御システムにいおて、前記ディジタル通信ネットワークは、約10msec以上の信号更新速度で、信号を伝達するように構成されている、圧力制御システム。
【請求項10】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、イーサネットTCP(送信制御プロトコル)/IP(インターネット・プロトコル)、DeviceNet、CAN(コントローラ・エリア・ネットワーク)、UDP/IP(ユーザ・データグラム・プロトコル/インターネット・プロトコル)、RS(推奨規格)−232、およびRS(推奨規格)−485の内少なくとも1つを備えている、圧力制御システム。
【請求項11】
請求項1記載の圧力制御システムにおいて、前記圧力センサは、容量系圧力変換器を備えている、圧力制御システム。
【請求項12】
請求項1記載の圧力制御システムであって、更に、前記ディジタル通信ネットワークに結合されている質量流量計を備えており、該質量流量コントローラは、前記真空チャンバに流入および流出する流体の流量を測定し、前記測定した流量を表す信号を前記圧力コントローラに送信するように構成されている、圧力制御システム。
【請求項13】
請求項1記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、
一方向に沿って圧力関係信号を伝達するように構成されている一方向通信ネットワークと、
2つの対向する方向に沿って圧力関係信号を伝達するように構成されている双方向通信ネットワークと、
の内少なくとも1つを備えている、圧力制御システム。
【請求項14】
圧力制御システムであって、
結合されているデバイスに信号を伝達するように構成されているディジタル通信ネットワークと、
前記ディジタル通信ネットワークに結合されている複数Nの圧力センサであって、各々、処理ツールの中にある真空チャンバ内部の圧力を測定するように構成されている、複数の圧力センサと、
前記ディジタル通信ネットワークに結合されている圧力コントローラであって、前記ツールから圧力設定点を受信し、前記受信した設定点と、各圧力センサが取り込み各圧力センサから前記圧力コントローラに前記ディジタル通信ネットワークを通じて伝達される圧力測定値とに応答して、前記真空チャンバ内部の圧力を制御することによって、前記真空チャンバ内の圧力を前記設定点に維持するように構成されている、圧力コントローラと、
を備えている、圧力制御システム。
【請求項15】
請求項14記載の圧力制御システムにおいて、前記圧力センサの数Nは可変である、圧力制御システム。
【請求項16】
請求項14記載の圧力制御システムにおいて、前記ディジタル通信ネットワークは、周期的な時間間隔で行われるパケット送信によって、前記信号を伝達するように構成されている、圧力制御システム。
【請求項17】
真空処理チャンバと、該真空処理チャンバに対する圧力設定点を供給する少なくとも1つの信号を含むツール制御信号を発生するように構成されているツール・コントローラとを含むツールと、
前記真空処理チャンバ内部の圧力を測定するように構成されている圧力センサと、
ディジタル通信ネットワークを通じて前記圧力センサに結合されている圧力コントローラであって、前記ディジタル・ネットワークを通じて前記圧力センサから受信した圧力測定値に応答して、更に前記ツール・コントローラによって供給される圧力設定点に応答して、前記真空チャンバ内部の圧力を制御することにより、前記真空チャンバ内の圧力を前記設定点に維持するように構成されている、圧力コントローラと、
を備えており、前記ディジタル通信ネットワークは、前記圧力センサと前記圧力コントローラとの間において圧力信号を伝達するように構成されている、システム。
【請求項18】
請求項17記載のシステムであって、更に、前記ツール・コントローラと前記圧力コントローラとの間にあるツール・レベル通信リンクを備えており、前記ツール・コントローラは、前記ツール・レベル通信リンクを通じて、前記圧力コントローラに前記圧力設定点を伝達するように構成されている、システム。
【請求項19】
ツールの中にある真空チャンバ内の圧力を制御する方法であって、
前記真空チャンバ内の圧力を測定するステップと、
前記ツールから、前記真空チャンバに対する圧力設定点を受信するステップと、
ディジタル通信チャネルを通じて、前記圧力測定値および前記圧力設定点を圧力コントローラに伝達するステップと、
前記圧力コントローラが、前記真空チャンバ内の圧力を前記設定点に維持するように、前記受信した圧力測定値および圧力設定点に応答して、前記圧力チャンバ内の圧力を制御するステップと、
を備えている、方法。
【図1】


【図2】
【図2】
【公表番号】特表2010−520563(P2010−520563A)
【公表日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願番号】特願2009−552816(P2009−552816)
【出願日】平成20年3月3日(2008.3.3)
【国際出願番号】PCT/US2008/055610
【国際公開番号】WO2008/109496
【国際公開日】平成20年9月12日(2008.9.12)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願日】平成20年3月3日(2008.3.3)
【国際出願番号】PCT/US2008/055610
【国際公開番号】WO2008/109496
【国際公開日】平成20年9月12日(2008.9.12)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]