
真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラム
【課題】真贋の高精度な判定に寄与する真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラムを提供する。
【解決手段】ステップ110では、読み出した特徴画像から圧縮対象画像を切り出す。次のステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元FT又はFFTを行って得られた結果を解析することにより圧縮対象画像の圧縮方向及び圧縮率を決定する。ステップ116では、上記ステップ114の処理で圧縮されて得られた圧縮済みの画像から真贋判定用の基準画像を切り出した後、ステップ118に移行する。ステップ118では、上記ステップ112の処理で決定された圧縮方向及び圧縮率並びに上記ステップ116の処理で切り出された基準画像を関連付けた情報をマスターデータとして二次記憶部に個々の予め定められた領域毎に記憶することにより登録する。
【解決手段】ステップ110では、読み出した特徴画像から圧縮対象画像を切り出す。次のステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元FT又はFFTを行って得られた結果を解析することにより圧縮対象画像の圧縮方向及び圧縮率を決定する。ステップ116では、上記ステップ114の処理で圧縮されて得られた圧縮済みの画像から真贋判定用の基準画像を切り出した後、ステップ118に移行する。ステップ118では、上記ステップ112の処理で決定された圧縮方向及び圧縮率並びに上記ステップ116の処理で切り出された基準画像を関連付けた情報をマスターデータとして二次記憶部に個々の予め定められた領域毎に記憶することにより登録する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラムに関する。
【背景技術】
【0002】
特許文献1には、真贋判定対象の印刷物の読取画像を取得する画像取得部と、読取画像にQRコードから基準データを取得するコードデータ復元部と、読取画像から抽出された比較画像を画素の数列に変換した後ランダムに並び替え、その並び替えた後の数列を予め設定された圧縮度N毎にグループ分割し、グループ毎に、そのグループに含まれる画素値の総和を求めることで比較データを生成する比較データ生成部と、基準データと比較データとの相関値を求め、その相関値の値によって印刷物の真贋判定を行う判定部と、を有する画像処理装置が開示されている。
【0003】
特許文献2には、紙を形成する繊維質材料の絡み具体が製造時に制御できないランダム性を有していることを利用し、紙上の基準領域を光学的に読み取り、基準データとして登録しておき、真贋判定時に、基準領域を含み基準領域よりも大サイズの照合領域をスキャナで読み取り、読み取りによって得られた照合データから基準領域と同サイズの部分領域のデータを抽出し、基準データとの相関値を正規化相関法により演算することを、照合領域内での部分領域の位置をずらしながら繰り返し、相関値の最大値及びその最大値のノーマライズド・スコアを各々閾値と比較することで真贋判定を行う真贋判定方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−246034号公報
【特許文献2】特開2005−38389号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、真贋の高精度な判定に寄与する、真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラムを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の真贋判定支援装置を、無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段と、前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段と、を含んで構成した。
【0007】
請求項1に記載の真贋判定支援装置を、請求項2に記載の発明のように、前記取得手段が、前記特徴の陰影が生じるように前記領域に光を照射する照射手段、及び前記照射手段によって光が照射された状態で前記領域を撮影する撮影手段を有し、前記特徴情報の連続性を、前記撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性としたものとしても良い。
【0008】
請求項1又は請求項2に記載の真贋判定支援装置を、請求項3に記載の発明のように、前記圧縮手段が、前記取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有し、前記記憶手段に記憶されている連続性情報により示される連続性が高い方向の特徴情報を圧縮するものとしても良い。
【0009】
請求項3に記載の真贋判定支援装置を、請求項4に記載の発明のように、前記圧縮手段が、前記複数の方向毎の特徴情報に対して周波数分析を行う分析手段を更に有し、前記連続性情報を前記分析手段での分析結果としたものとしても良い。
【0010】
請求項1〜請求項4の何れか1項に記載の真贋判定装置を、請求項5に記載の発明のように、前記領域内での前記特徴の位置を二次元座標系で規定したものとしても良い。
【0011】
請求項1〜請求項4の何れか1項に記載の真贋判定装置を、請求項6に記載の発明のように、前記領域内での前記特徴の位置を極座標系で規定したものとしても良い。
【0012】
請求項1〜請求項6の何れか1項に記載の真贋判定装置を、請求項7に記載の発明のように、前記固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて記憶した圧縮率記憶手段と、前記特定情報に対応する情報を受け付ける受付手段と、を更に含み、前記圧縮手段が、前記受付手段によって前記特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を前記圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた前記特徴情報を圧縮するものとしても良い。
【0013】
請求項8に記載の真贋判定装置を、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、前記取得手段が、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得し、前記圧縮手段が、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮し、前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段を含んで構成した。
【0014】
請求項9に記載の真贋判定支援プログラムを、無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段、及び前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段としてコンピュータを機能させるためのものとした。
【0015】
請求項10に記載の真贋判定プログラムを、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含んで構成された真贋判定装置を制御するコンピュータを、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得する前記取得手段、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮する前記圧縮手段、及び前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段として機能させるためのものとした。
【発明の効果】
【0016】
請求項1及び請求項8〜請求項10に係る発明によれば、取得手段によって取得された特徴情報の連続性が高い方向について特徴情報を圧縮しない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【0017】
請求項2に係る発明によれば、取得手段によって取得された特徴情報の連続性を、撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性としない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【0018】
請求項3に係る発明によれば、取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有しない場合に比べ、真贋の判定が容易かつ高精度に実行される、という効果が得られる。
【0019】
請求項4に係る発明によれば、複数の方向毎の特徴情報に対して周波数分析を行う分析手段を有しない場合に比べ、特徴情報の連続性の高い方向が容易かつ高精度に特定される、という効果が得られる。
【0020】
請求項5に係る発明によれば、領域内での特徴の位置を二次元座標系で規定しない場合に比べ、固体の表面の定められた領域において縦又は横方向に特徴情報の連続性を有する固体が真贋の判定対象とされた場合であっても、真贋の高精度な判定に寄与する、という効果が得られる。
【0021】
請求項6に係る発明によれば、領域内での特徴の位置を極座標系で規定しない場合に比べ、固体の表面の定められた領域において同心円方向に特徴情報の連続性を有する固体が真贋の判定対象とされた場合であっても、真贋の高精度な判定に寄与する、という効果が得られる。
【0022】
請求項7に係る発明によれば、固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて圧縮率記憶手段に記憶し、受付手段によって特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた特徴情報を圧縮する構成を有しない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【図面の簡単な説明】
【0023】
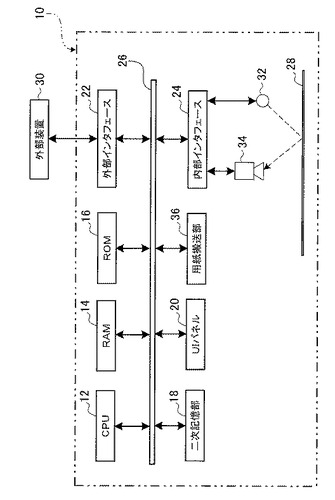
【図1】実施の形態に係る真贋判定装置の構成の一例を示す概略構成図である。
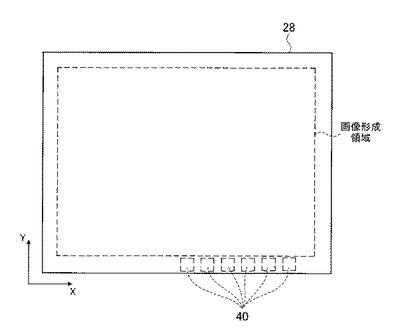
【図2】実施の形態に係る真贋判定装置を用いた真贋の判定対象とされる用紙の構成の一例を示す概略構成図である。
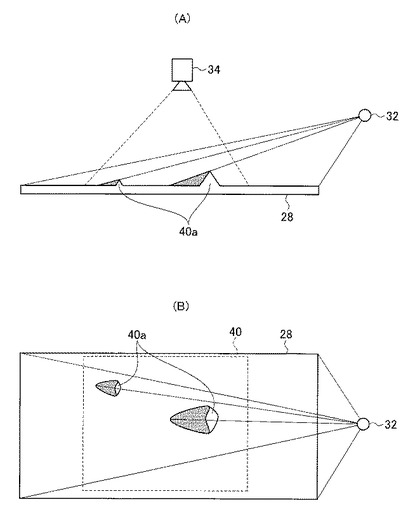
【図3】光源によって用紙の表面の予め定められた領域に光が照射された状態でカメラにより1つの予め定められた領域を撮影している状態の一例を示す模式図であり、(A)は予め定められた領域を側方から見た状態を示し、(B)は予め定められた領域を上方から見た状態を示す。
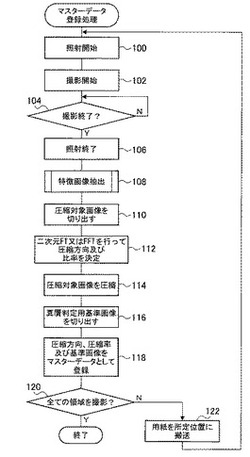
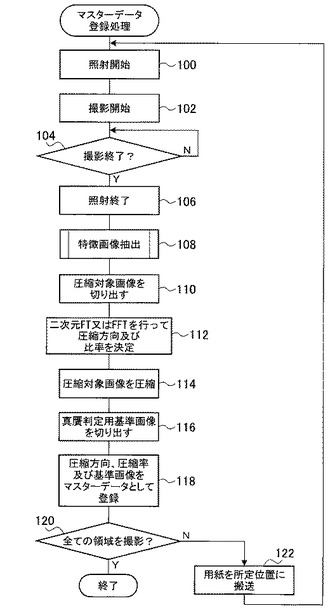
【図4】実施の形態に係るマスターデータ登録処理プログラムの処理の流れの一例を示すフローチャートである。
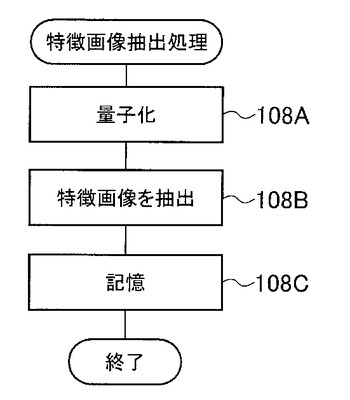
【図5】実施の形態に係る特徴画像抽出処理プログラムの処理の流れの一例を示すフローチャートである。
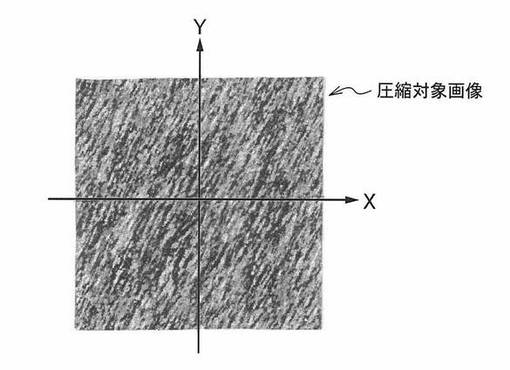
【図6】圧縮対象画像の一例を示す図である。
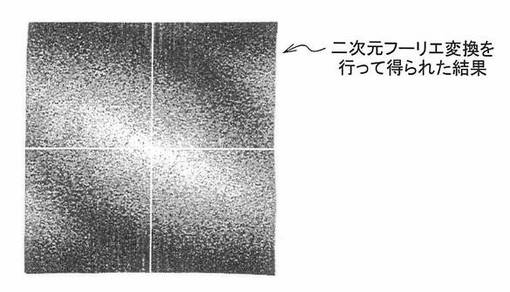
【図7】図6に示す圧縮対象画像に対して二次元フーリエ変換を行って得た結果を示す図である。
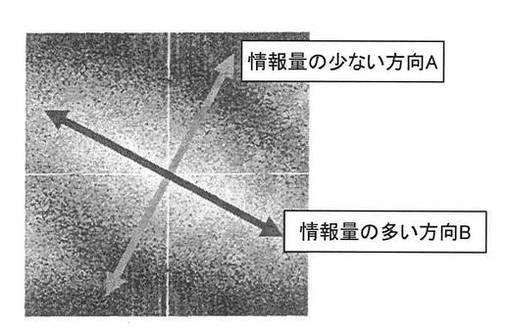
【図8】情報量の異方性を示す図である。
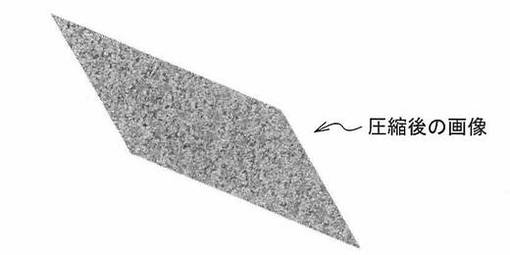
【図9】圧縮対象画像を圧縮して得た画像(圧縮済みの画像)の一例を示す図である。
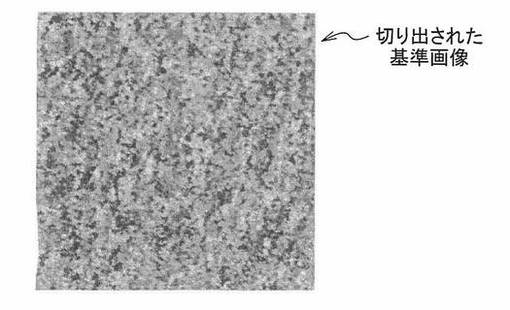
【図10】真贋判定に用いられる基準画像の一例を示す図である。
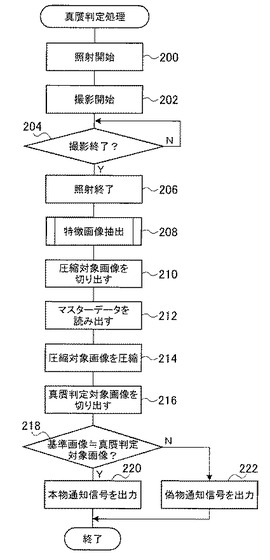
【図11】実施の形態に係る真贋判定処理プログラムの処理の流れの一例を示すフローチャートである。
【図12】他の圧縮対象画像の一例を示す図である。
【発明を実施するための形態】
【0024】
以下、図面を参照して、本発明を実施するための実施の形態の一例について詳細に説明する。
【0025】
[ランダムパターン]
まず、本実施の形態を説明するのに先立ち、固体の物品自体が元来有している無作為性を有する特徴、すなわち、再現不能な微細な凹凸の特徴(以下、ランダムパターンと称す)について説明する。
【0026】
例えば、不織布では、繊維が複雑に絡み合ってできたものであり、この繊維によるパターンは二つとない固有の存在である。すなわち、不織布から繊維によるランダムパターンが観測される。また、紙も植物繊維が複雑に絡み合って作られるため、不織布のように紙からも紙毎に固有のランダムパターンが観測される。
【0027】
また、カーボン充填した黒色のゴム表面、ICパッケージ用のセラミック表面、金属微粒子分散のUV硬化型塗料の塗膜(所謂ラメ塗装)表面からも、表面の微小なクラックや材料の微粒子等によってランダムパターンが観測される。また、ステンレス鋼材表面からもヘアライン処理やサンドブラスト処理等、表面仕上げ時に作られたランダムパターンが観測される。また、皮革も自然の状態でその表面にランダムな皺が形成されているため、この皺がランダムパターンとして観測される。
【0028】
このように、ランダムパターンは各種の物品から観測される。このランダムパターンは、意図的に作ったものではなく、物品そのものの成り立ち、製造工程、或いは製造後などで不作為にできたものであり、そのパターンが全く同じである物品が複数存在するとは考え難い。また、同一のものを故意に作り出すことは困難と思われる。すなわち、同一の工程を経て製造・物流された物品であっても、微視的には、物品ごとにランダムパターンが異なる。特に、上述したようなランダムパターンは、顕微鏡レベルの微細なパターンであり、これを偽造することは容易ではない。また、ゴム表面や皮革表面、或いは不織布といった形状が変化し易い軟らかい素材のランダムパターンも、外力が加わらない状態では安定である。
【0029】
本実施の形態は、上記のような物品が元来有するランダムなパターンを、各物品の真贋を判定するための情報として利用するものである。このような微細なランダムパターンの読み取りには、触針法、電子顕微鏡観察法等幾つかの方法が考えられるが、物品保護の観点から未処理、非破壊であることが望ましい。光を利用する方法はこの点で優れている。以下、光を利用してランダムパターンを読み取って、物品の真贋を判定する真贋判定装置について説明する。
【0030】
[全体構成]
図1は、本実施の形態に係る真贋判定装置10の概略構成図である。図1に示すように、真贋判定装置10は、CPU12、RAM14、ROM16、二次記憶部18、UI(ユーザ・インタフェース)パネル20、外部I/F(インタフェース)22、内部I/F24、光源32、カメラ34、及び用紙搬送部36を備えている。
【0031】
CPU12は、ROM16に記憶されたプログラムを実行し、真贋判定装置10全体の動作を制御する。なお、ROM16に記憶されたプログラムには、登録対象の物品表面のランダムパターンを含む予め定められた領域を被写体として撮影し、撮影して得た画像から物品表面のランダムパターンの特徴を示す特徴情報としての特徴画像を抽出して、この特徴画像を真贋の判定に供する基準対象物品に関するマスターデータの一部として登録するマスターデータ登録処理プログラムや、真贋の判定対象の物品の表面を撮影し、撮影して得た画像から物品表面のランダムパターンの特徴を示す特徴情報としての特徴画像を抽出して、この特徴画像をサンプルデータとして、このサンプルデータを予め登録されているマスターデータに含まれる特徴画像と比較することにより物品の真贋を判定する真贋判定処理プログラムが含まれている。
【0032】
なお、ここで言う物品表面のランダムパターンとは、外部から撮影される物品の再現不能な微細な特徴をいう。例えば、外側が下層の微細な特徴が撮影される程度に透明な保護膜で覆われている物品の場合には、透明な保護膜自体に現れている再現不能な微細な特徴と、透明な保護膜の下層に現れている再現不能な微細な特徴の双方の特徴を含む。具体的に例示すると、現在金融機関等で広く使用されているキャッシュカードやクレジットカード等のカードが挙げられる。このカードには、例えばラメ状の微細な地紋が現れた塗装の上に、ハードコート等の透明層が固着されているタイプのものがある。従って、このような物品の場合には、保護膜自体に現れた凹凸等の微細なランダムパターンと、保護膜の下層の微細な地紋(ランダムパターン)との双方が含まれる。
【0033】
本実施の形態では、真贋判定対象の物品として、用紙28を例に挙げて説明するが、これに限らず、例えばプラスチックカードにテープ状(ストライプ)の磁気記録媒体を貼り付けたキャッシュカードやクレジットカード等の磁気カード(以下、カード)などの物品として流通する固体であれば如何なるものであっても良い。
【0034】
RAM14は、ワークメモリであって、撮影された画像やこの画像から抽出した特徴画像等を一時的に記憶する領域を含む。二次記憶部18は、装置の電源スイッチが切られても保持しなければならない各種情報を記憶するものであり、例えばハードディクス装置及びフラッシュメモリなどが適用される。UIパネル20は、ディスプレイ上に透過型のタッチパネルが重ねられたタッチパネルディスプレイ等から構成され、各種情報がディスプレイの表示面に表示されると共に、ユーザによってタッチパネルが触れられることにより各種情報や指示を受け付ける。
【0035】
CPU12、RAM14、ROM16、二次記憶部18及びUIパネル20は互いにシステムバス26を介して接続されている。従って、CPU12は、RAM14、ROM16、及び二次記憶部18へのアクセスと、UIパネル20への各種情報の表示と、UIパネル20に対するユーザの操作指示内容の把握と、を各々行う。
【0036】
外部I/F22は、外部装置30に接続されており、外部装置30とデータの授受を行うためのインタフェースである。外部I/F22もまたシステムバス26に接続されている。従って、CPU12は、外部I/F22を介して外部装置30に用紙28の特徴画像を登録させるために、用紙28の特徴画像を送信したり、外部I/F22を介して外部装置30から登録済の用紙28の特徴画像を真贋判定装置10で使用するために受信したりする。
【0037】
内部I/F24は、光源32及びカメラ34に接続されており、光源32及びカメラ34とデータの授受を行うためのインタフェースである。光源32は、予め定められた波長域の光を照射するものであり、予め定められた位置に配置された用紙28の表面に対して斜め方向から光を照射して用紙28の表面を照明するように配置されている。光源32としては、例えば、LED、ハロゲンランプ、蛍光灯、又はキセノン放電管などが適用される。カメラ34は、光源32から照射された光によって照明された用紙28の表面の予め定められた領域を被写体として撮影して画像を取得する。なお、真贋判定装置10におけるカメラ34の位置及び向きは固定されている。
【0038】
内部I/F24もまたシステムバス26に接続されている。従って、CPU12は、内部I/F24を介した光源32の点灯タイミング(光の照射タイミング)の制御と、光源32の点灯状態の把握と、内部I/F24を介したカメラ34の撮影タイミングの制御と、カメラ34によって撮影されて得られた画像の取得と、を各々行う。
【0039】
用紙搬送部36は、用紙28の予め定められた領域が予め定められた向きでカメラ34によって撮影されるように用紙28を予め定められた位置(以下、「撮影位置」という。)に搬送するものである。用紙搬送部36もまたシステムバス26に接続されている。従って、CPU12は、用紙搬送部36の制御及び用紙搬送部36の動作状態の把握を行う。
【0040】
図2には、本実施の形態に係る真贋判定装置10による真贋判定の対象とされる用紙28の形態例が示されている。図2に示すように、用紙28は、長方形状であり、その中央部には用紙28の外輪郭から予め定められた距離(例えば5mm)だけ内側にオフセットされることで形成された領域であって、プリンタなどによって画像が形成される長方形状の画像形成領域が設けられている。また、用紙28において、長手方向をX方向とし、短手方向をY方向とした場合、用紙28の長手方向の一辺とその一辺に隣接する画像形成領域の一辺とで挟まれる余白領域には、各々カメラ34によって撮影される複数(ここでは、一例として6個)の予め定められた領域40がX方向に沿って設けられている。なお、図2に示す例では説明の便宜上、破線を用いて画像形成領域及び予め定められた領域40を描いたが、実際の用紙28には破線が描かれているわけではない。
【0041】
図3には、光源32によって用紙28の表面の予め定められた領域40に光が照射された状態でカメラ34により1つの予め定められた領域40を撮影している状態の一例が示されている。図3に示す例では、カメラ34が、撮影位置に配置された用紙28の予め定められた領域40が被写体とされるように予め定められた領域40の上方に配置されている。また、光源32は、用紙28の表面の予め定められた領域40の平面領域に対して予め定められた傾斜角度から予め定められた領域40を照明するように配置され、光源32からは予め定められた波長域の光が発せられる。光源32から発せられた光が予め定められた領域40に含まれるランダムパターンを構成している微細な凸凹のパターンの凸部40aに当たると、凸部40aの陰影が形成される。カメラ34は凸部40aの陰影を含むランダムパターンを有する予め定められた領域40を撮影する。なお、本実施の形態では、凸部40aの陰影が形成されるように予め定められた領域40の平面領域に対して30度斜め上方から光を照射する場合の形態例を挙げて説明しているが、これに限らず、凸部40aの陰影が形成されるように光を照射する位置であれば如何なる位置に光源32を配置しても良い。
【0042】
[真贋判定装置の動作]
次に、真贋判定装置10の動作を説明する。用紙28の真贋を判定するためには、本物とされる用紙28が有するランダムパターンの特徴を予め登録しておく必要がある。そこで、先ず、図4〜図9を参照して、真贋判定装置10において実行されるマスターデータ登録処理について説明する。なお、このマスターデータ登録処理は、ROM16に記憶されているマスターデータ登録処理プログラムがCPU12によって実行されることで実現される。
【0043】
図4は、本実施の形態に係るマスターデータ登録処理プログラムの処理の流れの一例を示すフローチャートである。なお、以下の説明では、錯綜を回避するために、真贋の判定対象とされる用紙28と比較される用紙28(真贋の判定の基準となる用紙28)が撮影位置に配置されている場合について説明する。
【0044】
図4のステップ100では、予め定められた領域40に対する光の照射開始を光源32に指示した後、ステップ102に移行する。上記ステップ100の処理に応じて、光源32は、予め定められた領域40に対して光の照射を開始する。ステップ102では、カメラ34に対して撮影開始を指示した後、ステップ104に移行する。上記ステップ102の処理に応じて、カメラ34は、予め定められた領域40を被写体として撮影を開始する。なお、ここでは、一例として、画像が400dpiの解像度で撮影されるものとする。ステップ104では、予め定められた領域40の撮影が終了するまで待機する。カメラ34が予め定められた領域40を撮影して画像を取得すると、ステップ104は肯定判定となってステップ106に移行する。ステップ106では、光源32に対して予め定められた領域40に対する光の照射終了を指示した後、ステップ108に移行する。上記ステップ106の処理に応じて、光源32は、予め定められた領域40に対して光の照射を終了する。
【0045】
ステップ108では、特徴画像抽出処理を実行する。ここで、図5を参照して、特徴画像抽出処理を実行しているときの真贋判定装置10の作用を説明する。なお、図5は、CPU12により実行される特徴画像抽出処理プログラムの処理の流れの一例を示すフローチャートであり、この特徴画像抽出処理プログラムはROM16に予め記憶されている。
【0046】
図5のステップ108Aでは、上記ステップ102,104の処理によってカメラ34に取得させた画像に対して量子化を実施する。つまり、撮影によって得られた画像を予め定められた個数のピクセルとしてのメッシュ(例えばメッシュ数d=縦M×横N)に区切ることによって量子化を実施する。そして、ステップ108Bでは、各メッシュをある濃度値(濃度レベルq)で代表させることで標本化を実施することにより特徴画像を抽出する。
【0047】
なお、本実施の形態では、上記ステップ108Bにおいて、標本化して得られた特徴画像を行列で記述しているが、これに限らず、j番目のメッシュの濃度をXjとして、特徴画像のランダムパターンを、X=(X1,X2,・・・・・Xd)t(tは転置を表す)なる特徴ベクトルで記述しても良い。この場合、この特徴ベクトルを特徴画像を表す情報として用いる。この特徴ベクトルの各要素は対応するピクセル毎に濃度を与える。従って、特徴画像のランダムパターンは特徴ベクトルによって張られた特徴空間上の1点として表されることになる。前述したように、用紙28は、微視的には異なるランダムパターンを有するため、特徴ベクトルも用紙28毎に固有の特徴を表すものとなる。すなわち、各用紙28のランダムパターンの特徴が特徴ベクトルによって表現されることになる。
【0048】
次のステップ108Cでは、上記ステップ108Bの処理によって得られた特徴画像をRAM14の予め定められた記憶領域αに記憶した後、本特徴画像抽出処理プログラムを終了してマスターデータ登録処理プログラムのステップ110に移行する。
【0049】
ステップ110では、RAM14の予め定められた記憶領域αから特徴画像を読み出し、読み出した特徴画像から圧縮対象画像を切り出す。次のステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元フーリエ変換(FT:Fourier Transform)又は二次元高速フーリエ変換(FFT:Fast Fourier Transform)を行って得られた結果を解析することにより圧縮対象画像の圧縮方向及び圧縮率を決定する。つまり、ステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元FT又はFFTを行って得られた結果を解析することにより情報の連続性の高い方向と情報の連続性の低い方向とを特定し、連続性の低い方向を特徴画像の圧縮方向とし、連続性を高い方向に近付けるように圧縮率を決定する。例えば、上記ステップ110の処理で切り出された圧縮対象画像が図6に示すように矩形状であって二次元座標系で定められた場合、圧縮対象画像に対して二次元FT又はFFTを行うと、一例として図7に示すように表される。この場合、一例として図8に示すように情報の連続性が低い方向(情報量の少ない方向A)と情報の連続性が高い方向(情報量の多い方向B)とが特定され、連続性の低い方向Aが特徴画像の圧縮方向とされる。圧縮率は、情報量の少ない方向Aの情報の連続性が情報量の多い方向Bの情報の連続性に近付くように決定される。なお、本実施の形態では、情報量の少ない方向Aの情報の連続性が情報量の多い方向Bの情報の連続性に最も近似する圧縮率(予め定められた誤差内で一致する圧縮率)を採用しているが、これに限らず、圧縮対象画像に対して行った二次元FT又はFFTの結果における情報量の連続性に係る異方性を少なくとも現時点よりも弱める圧縮率を採用すれば良い。
【0050】
次のステップ114では、上記ステップ110の処理で切り出した圧縮対象画像を、上記ステップ112の処理で決定された圧縮方向に、上記ステップ112の処理で決定された圧縮率で圧縮(予め定められた固定値の変換マトリクスを用いて1次変換)した後、ステップ116に移行する。上記ステップ114の処理によって例えば図6に示す圧縮対象画像が図8に示す情報量の少ない方向Aに圧縮されると、一例として図9に示す画像が得られる。
【0051】
ステップ116では、上記ステップ114の処理で圧縮されて得られた圧縮済みの画像から真贋判定用の基準画像を切り出した後、ステップ118に移行する。上記ステップ116の処理で切り出された基準画像の一例が図10に示されている。図10に示すように上記ステップ114の処理で圧縮対象画像が圧縮されることにより、情報量の連続性に係る方向の異方性(情報密度の不均一性)が軽減したことが判る。つまり、図6に示す圧縮対象画像(圧縮前の画像)では、用紙28の繊維形状が左下から右上へと流れる流線形の模様が現れているのに対し、図10に示す基準画像では、そのような特定方向へ流れる流線形の模様が見え難くなっていることが判る。
【0052】
ステップ118では、上記ステップ112の処理で決定された圧縮方向及び圧縮率並びに上記ステップ116の処理で切り出された基準画像を関連付けた情報をマスターデータとして二次記憶部128に個々の予め定められた領域40毎に記憶することにより登録した後、ステップ120に移行する。
【0053】
ステップ120では、全ての予め定められた領域40(本実施の形態では6個の予め定められた領域40)を撮影したか否かを判定し、否定判定となった場合にはステップ122に移行し、未撮影の1つの予め定められた領域40が撮影される撮影位置に用紙28を搬送するように用紙搬送部36を制御した後、ステップ100に戻る。ステップ120において肯定判定となった場合には本マスターデータ登録処理を終了する。
【0054】
次に、図11を参照しながら用紙28の真贋を判定する動作について説明する。本実施の形態に係る真贋判定装置10では、用紙28の真贋を判定する場合にCPU12によって真贋判定処理プログラムが実行される。図11は、本実施の形態に係る真贋判定処理プログラムの処理の流れの一例を示すフローチャートである。なお、以下の説明では、錯綜を回避するために、真贋の判定対象とされる用紙28が撮影位置に配置されている場合について説明する。
【0055】
図11のステップ200では、上記ステップ100の処理に相当する処理を実行した後、ステップ202に移行する。ステップ202では、上記ステップ102の処理に相当する処理を実行した後、ステップ204に移行する。ステップ204では、上記ステップ104の処理に相当する処理を実行した後、ステップ206に移行する。ステップ206では、上記ステップ106の処理に相当する処理を実行した後、ステップ208に移行する。ステップ208では、上記ステップ108の処理に相当する処理を実行した後、ステップ210に移行する。なお、上記ステップ208では、図5に示すフローチャートの処理を実行することになるが、この場合、ステップ108Bでは、真贋の判定対象とされる用紙28の予め定められた領域40の特徴画像をサンプルデータとして抽出する。
【0056】
ステップ210では、RAM14の予め定められた記憶領域αからサンプルデータを読み出し、読み出したサンプルデータから圧縮対象画像を切り出した後、ステップ212に移行する。ステップ212では、二次記憶部18からマスターデータを読み出した後、ステップ214に移行する。ステップ214では、上記ステップ210の処理で切り出された圧縮対象画像を、上記ステップ212の処理によって読み出されたマスターデータに含まれる圧縮方向に、上記ステップ212の処理によって読み出されたマスターデータに含まれる圧縮率で圧縮した後、ステップ216に移行する。ステップ216では、上記ステップ214の処理で圧縮されて得られた圧縮済みの画像から真贋判定対象画像を切り出した後、ステップ218に移行する。なお、切り出し形状及び大きさは、上記ステップ116の処理で切り出された基準画像の外輪郭の形状及び大きさとする。
【0057】
ステップ218では、“上記ステップ212の処理によって読み出されたマスターデータに含まれる基準画像”≒“上記ステップ216の処理で切り出された真贋判定対象画像”という関係が成立しているか否かを判定し、肯定判定となった場合にはステップ220に移行する一方、否定判定となった場合にはステップ222に移行する。
【0058】
ステップ220では、真贋の判定対象とされた用紙28が本物であることを示す本物通知信号を出力した後、本真贋判定処理プログラムを終了する。ステップ222では、真贋の判定対象とされた用紙28が偽物であることを示す偽物通知信号を出力した後、本真贋判定処理プログラムを終了する。
【0059】
本実施の形態では、上記ステップ220の処理によって出力された本物通知信号の出力先及び上記ステップ222の処理によって出力された偽物通知信号の出力先を共にUIパネル20としている。本実施の形態に係るUIパネル20では、上記ステップ220の処理によって出力された本物通知信号を受けて、例えば用紙28が本物であることを示すメッセージ(例えば「用紙は本物です。」)を表示し、上記ステップ222の処理によって出力された偽物通知信号を受けて、例えば用紙28が偽物であることを示すメッセージ(例えば「用紙は偽物です。」)を表示する。なお、この表示形態は一例であり、この他の表示形態であっても良い。例えば、スピーカによって音声で真贋の判定結果を可聴表示したり、プリンタによって用紙に印字することで真贋の判定結果を永久可視表示したりしても良い。また、UIパネル20による可視表示、スピーカによる可聴表示、及びプリンタによる永久可視表示の少なくとも2表示形態を組み合わせても良い。また、真贋の判定結果を可読性を有する文字情報として表示する形態に限らず、真贋の判定結果を暗号化した上でバーコードやQRコードなどに画像化して出力するようにしても良い。また、上記ステップ220の処理によって出力された本物通知信号の出力先及び上記ステップ222の処理によって出力された偽物通知信号の出力先を外部装置30とし、外部装置30の記憶領域に本物通知信号及び偽物通知信号を記憶させても良い。
【0060】
以上のように、本実施の形態に係る真贋判定装置10によれば、例えば圧縮しない1枚の特徴画像を記憶するために要する記憶領域の容量で、複数の異なる予め定められた領域40に関する特徴画像(複数枚の特徴画像)が記憶されるので、本実施の形態に係る真贋判定装置10を用いない場合に比べ、用紙28の真贋が高精度に判定される。
【0061】
なお、上記実施の形態では、二次元FT又はFFTを行う際に特徴画像に対して二次元座標系を適用した場合の形態例を挙げて説明したが、例えば図12に示すように表面に樹木の年輪のような連続的な同心円状の模様を有する物品、表面に連続的な放射状の模様を有する物品、又は表面に渦巻状の流線形の模様を有する物品に対しては、極座標系を適用することが好ましい。これにより、少なくとも二次元座標系を適用した場合に比べ、連続性の有無(又は高低)が高精度に判定されることになる。
【0062】
また、上記実施の形態では、真贋の判定対象とされる用紙28が共通の製造方法及び製造ラインで製造されたことを前提として、真贋の判定対象とされる用紙28(サンプルデータの取得用の用紙28)とこの用紙28の真贋を判定するための基準として用いられる用紙28(マスターデータの取得用の用紙28)とを異なる用紙とし、真贋の判定対象とされる個々の用紙28に対して、真贋を判定するための基準の用紙28として共通の用紙28を適用した場合の形態例を挙げて説明したが、真贋の判定対象とされる個々の用紙28が互いに異なる製造方法や異なる製造ラインで製造された用紙である場合、上記実施の形態で説明したようにサンプルデータの取得用の用紙28の各々に対して、真贋を判定するための基準の用紙28として共通の用紙28を用いるよりも、サンプルデータの取得用の用紙28をマスターデータの取得用の用紙28として用いる方が真贋の判定精度が高められる。つまり、真贋の判定対象毎にその判定対象そのもの自体を基準の用紙28として扱うことである。そこで、この場合、図4に示すフローチャートの上記ステップ130の処理において、マスターデータを、マスターデータの抽出対象とされている用紙28を特定する特定情報と対応付けて二次記憶部18に記憶することにより登録する。そして、判定対象とされる用紙28の真贋を判定する際に実行される真贋判定処理プログラムにおいて、上記ステップ200の前段階に、特定情報に対応する情報(ID)を受け付けるステップを挿入し、上記ステップ212において、上記ステップ200の前段階のステップで受け付けられた特定情報に対応する情報を用いて対応するマスターデータを二次記憶部18から読み出すようにすれば良い。
【0063】
また、上記実施の形態では、特徴画像における情報の連続性を解析するために二次元FT又はFFTを適用したが、これに限らず、ウェーブレット解析を適用しても良い。
【0064】
また、上記実施の形態では、特徴画像における情報の連続性の高い方向を二次元FT又はFFTを実施することで特定する形態例を挙げて説明したが、これに限らず、方向によって情報の連続性が異なっており、事前に連続性の高い方向が判っている場合は、例えば事前にUIパネル20を介して連続性の高い方向を指定しておき、その方向について情報を圧縮するようにしても良い。この場合、二次記憶部18に圧縮方向(連続性の高い方向として指定された方向)を示す情報を予め記憶しておき、その情報により示される圧縮方向に圧縮を実施すれば良い。
【0065】
また、上記実施の形態では、複数個の予め定められた領域40を撮影することによって得られた複数の画像の各々から特徴画像を抽出し、抽出した特徴画像を用いて真贋の判定を行う場合の形態例を挙げて説明したが、これに限らず、1つの予め定められた領域40を撮影することによって得られた1つの画像から特徴画像を抽出し、抽出した特徴画像を用いて真贋の判定を行うようにしても良い。この場合、上記実施の形態に比べ、特徴画像を記憶するために要する記憶領域の容量が削減される。
【0066】
また、上記実施の形態では、用紙28をX軸方向に搬送して撮影位置に配置することによって撮影対象である予め定められた領域40をカメラ34の撮影領域に含まれるようにしたが、これに限らず、用紙28を搬送せずに固定し、カメラ34をX軸方向に移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにしても良い。また、用紙28及びカメラ28をX軸方向に沿って互いに反対の向きに移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにしても良い。このように用紙28及びカメラ34の少なくとも一方を相対移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにすれば良い。
【0067】
また、上記実施の形態では、CPU12によってマスターデータ登録処理プログラム及び真贋判定処理プログラムが実行されることによりマスターデータ登録処理プログラム及び真贋判定処理プログラムの各ステップの処理を実現するソフトウェア的な形態を例示したが、これに限らず、各種回路(一例として、ASIC(Application Specific Integrated Circuit))を接続して構成されるハードウェア的な形態や、ソフトウェア的な形態とハードウェア的な形態とを組み合わせた形態が挙げられる。
【0068】
また、上記実施の形態では、マスターデータ登録処理プログラム及び真贋判定処理プログラムがROM16に予め記憶されている場合の形態例を挙げて説明したが、これに限らず、これらのプログラムをCD−ROMやDVD−ROM、USBメモリなどのコンピュータによって読み取られる記録媒体に格納した状態で提供する形態を適用しても良いし、有線又は無線による通信手段を介して配信する形態を適用しても良い。
【符号の説明】
【0069】
10 真贋判定装置
12 CPU
18 二次記憶部
32 光源
34 カメラ
【技術分野】
【0001】
本発明は、真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラムに関する。
【背景技術】
【0002】
特許文献1には、真贋判定対象の印刷物の読取画像を取得する画像取得部と、読取画像にQRコードから基準データを取得するコードデータ復元部と、読取画像から抽出された比較画像を画素の数列に変換した後ランダムに並び替え、その並び替えた後の数列を予め設定された圧縮度N毎にグループ分割し、グループ毎に、そのグループに含まれる画素値の総和を求めることで比較データを生成する比較データ生成部と、基準データと比較データとの相関値を求め、その相関値の値によって印刷物の真贋判定を行う判定部と、を有する画像処理装置が開示されている。
【0003】
特許文献2には、紙を形成する繊維質材料の絡み具体が製造時に制御できないランダム性を有していることを利用し、紙上の基準領域を光学的に読み取り、基準データとして登録しておき、真贋判定時に、基準領域を含み基準領域よりも大サイズの照合領域をスキャナで読み取り、読み取りによって得られた照合データから基準領域と同サイズの部分領域のデータを抽出し、基準データとの相関値を正規化相関法により演算することを、照合領域内での部分領域の位置をずらしながら繰り返し、相関値の最大値及びその最大値のノーマライズド・スコアを各々閾値と比較することで真贋判定を行う真贋判定方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−246034号公報
【特許文献2】特開2005−38389号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、真贋の高精度な判定に寄与する、真贋判定支援装置、真贋判定装置、真贋判定支援プログラム、及び真贋判定プログラムを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の真贋判定支援装置を、無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段と、前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段と、を含んで構成した。
【0007】
請求項1に記載の真贋判定支援装置を、請求項2に記載の発明のように、前記取得手段が、前記特徴の陰影が生じるように前記領域に光を照射する照射手段、及び前記照射手段によって光が照射された状態で前記領域を撮影する撮影手段を有し、前記特徴情報の連続性を、前記撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性としたものとしても良い。
【0008】
請求項1又は請求項2に記載の真贋判定支援装置を、請求項3に記載の発明のように、前記圧縮手段が、前記取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有し、前記記憶手段に記憶されている連続性情報により示される連続性が高い方向の特徴情報を圧縮するものとしても良い。
【0009】
請求項3に記載の真贋判定支援装置を、請求項4に記載の発明のように、前記圧縮手段が、前記複数の方向毎の特徴情報に対して周波数分析を行う分析手段を更に有し、前記連続性情報を前記分析手段での分析結果としたものとしても良い。
【0010】
請求項1〜請求項4の何れか1項に記載の真贋判定装置を、請求項5に記載の発明のように、前記領域内での前記特徴の位置を二次元座標系で規定したものとしても良い。
【0011】
請求項1〜請求項4の何れか1項に記載の真贋判定装置を、請求項6に記載の発明のように、前記領域内での前記特徴の位置を極座標系で規定したものとしても良い。
【0012】
請求項1〜請求項6の何れか1項に記載の真贋判定装置を、請求項7に記載の発明のように、前記固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて記憶した圧縮率記憶手段と、前記特定情報に対応する情報を受け付ける受付手段と、を更に含み、前記圧縮手段が、前記受付手段によって前記特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を前記圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた前記特徴情報を圧縮するものとしても良い。
【0013】
請求項8に記載の真贋判定装置を、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、前記取得手段が、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得し、前記圧縮手段が、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮し、前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段を含んで構成した。
【0014】
請求項9に記載の真贋判定支援プログラムを、無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段、及び前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段としてコンピュータを機能させるためのものとした。
【0015】
請求項10に記載の真贋判定プログラムを、請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含んで構成された真贋判定装置を制御するコンピュータを、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得する前記取得手段、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮する前記圧縮手段、及び前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段として機能させるためのものとした。
【発明の効果】
【0016】
請求項1及び請求項8〜請求項10に係る発明によれば、取得手段によって取得された特徴情報の連続性が高い方向について特徴情報を圧縮しない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【0017】
請求項2に係る発明によれば、取得手段によって取得された特徴情報の連続性を、撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性としない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【0018】
請求項3に係る発明によれば、取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有しない場合に比べ、真贋の判定が容易かつ高精度に実行される、という効果が得られる。
【0019】
請求項4に係る発明によれば、複数の方向毎の特徴情報に対して周波数分析を行う分析手段を有しない場合に比べ、特徴情報の連続性の高い方向が容易かつ高精度に特定される、という効果が得られる。
【0020】
請求項5に係る発明によれば、領域内での特徴の位置を二次元座標系で規定しない場合に比べ、固体の表面の定められた領域において縦又は横方向に特徴情報の連続性を有する固体が真贋の判定対象とされた場合であっても、真贋の高精度な判定に寄与する、という効果が得られる。
【0021】
請求項6に係る発明によれば、領域内での特徴の位置を極座標系で規定しない場合に比べ、固体の表面の定められた領域において同心円方向に特徴情報の連続性を有する固体が真贋の判定対象とされた場合であっても、真贋の高精度な判定に寄与する、という効果が得られる。
【0022】
請求項7に係る発明によれば、固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて圧縮率記憶手段に記憶し、受付手段によって特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた特徴情報を圧縮する構成を有しない場合に比べ、真贋の高精度な判定に寄与する、という効果が得られる。
【図面の簡単な説明】
【0023】
【図1】実施の形態に係る真贋判定装置の構成の一例を示す概略構成図である。
【図2】実施の形態に係る真贋判定装置を用いた真贋の判定対象とされる用紙の構成の一例を示す概略構成図である。
【図3】光源によって用紙の表面の予め定められた領域に光が照射された状態でカメラにより1つの予め定められた領域を撮影している状態の一例を示す模式図であり、(A)は予め定められた領域を側方から見た状態を示し、(B)は予め定められた領域を上方から見た状態を示す。
【図4】実施の形態に係るマスターデータ登録処理プログラムの処理の流れの一例を示すフローチャートである。
【図5】実施の形態に係る特徴画像抽出処理プログラムの処理の流れの一例を示すフローチャートである。
【図6】圧縮対象画像の一例を示す図である。
【図7】図6に示す圧縮対象画像に対して二次元フーリエ変換を行って得た結果を示す図である。
【図8】情報量の異方性を示す図である。
【図9】圧縮対象画像を圧縮して得た画像(圧縮済みの画像)の一例を示す図である。
【図10】真贋判定に用いられる基準画像の一例を示す図である。
【図11】実施の形態に係る真贋判定処理プログラムの処理の流れの一例を示すフローチャートである。
【図12】他の圧縮対象画像の一例を示す図である。
【発明を実施するための形態】
【0024】
以下、図面を参照して、本発明を実施するための実施の形態の一例について詳細に説明する。
【0025】
[ランダムパターン]
まず、本実施の形態を説明するのに先立ち、固体の物品自体が元来有している無作為性を有する特徴、すなわち、再現不能な微細な凹凸の特徴(以下、ランダムパターンと称す)について説明する。
【0026】
例えば、不織布では、繊維が複雑に絡み合ってできたものであり、この繊維によるパターンは二つとない固有の存在である。すなわち、不織布から繊維によるランダムパターンが観測される。また、紙も植物繊維が複雑に絡み合って作られるため、不織布のように紙からも紙毎に固有のランダムパターンが観測される。
【0027】
また、カーボン充填した黒色のゴム表面、ICパッケージ用のセラミック表面、金属微粒子分散のUV硬化型塗料の塗膜(所謂ラメ塗装)表面からも、表面の微小なクラックや材料の微粒子等によってランダムパターンが観測される。また、ステンレス鋼材表面からもヘアライン処理やサンドブラスト処理等、表面仕上げ時に作られたランダムパターンが観測される。また、皮革も自然の状態でその表面にランダムな皺が形成されているため、この皺がランダムパターンとして観測される。
【0028】
このように、ランダムパターンは各種の物品から観測される。このランダムパターンは、意図的に作ったものではなく、物品そのものの成り立ち、製造工程、或いは製造後などで不作為にできたものであり、そのパターンが全く同じである物品が複数存在するとは考え難い。また、同一のものを故意に作り出すことは困難と思われる。すなわち、同一の工程を経て製造・物流された物品であっても、微視的には、物品ごとにランダムパターンが異なる。特に、上述したようなランダムパターンは、顕微鏡レベルの微細なパターンであり、これを偽造することは容易ではない。また、ゴム表面や皮革表面、或いは不織布といった形状が変化し易い軟らかい素材のランダムパターンも、外力が加わらない状態では安定である。
【0029】
本実施の形態は、上記のような物品が元来有するランダムなパターンを、各物品の真贋を判定するための情報として利用するものである。このような微細なランダムパターンの読み取りには、触針法、電子顕微鏡観察法等幾つかの方法が考えられるが、物品保護の観点から未処理、非破壊であることが望ましい。光を利用する方法はこの点で優れている。以下、光を利用してランダムパターンを読み取って、物品の真贋を判定する真贋判定装置について説明する。
【0030】
[全体構成]
図1は、本実施の形態に係る真贋判定装置10の概略構成図である。図1に示すように、真贋判定装置10は、CPU12、RAM14、ROM16、二次記憶部18、UI(ユーザ・インタフェース)パネル20、外部I/F(インタフェース)22、内部I/F24、光源32、カメラ34、及び用紙搬送部36を備えている。
【0031】
CPU12は、ROM16に記憶されたプログラムを実行し、真贋判定装置10全体の動作を制御する。なお、ROM16に記憶されたプログラムには、登録対象の物品表面のランダムパターンを含む予め定められた領域を被写体として撮影し、撮影して得た画像から物品表面のランダムパターンの特徴を示す特徴情報としての特徴画像を抽出して、この特徴画像を真贋の判定に供する基準対象物品に関するマスターデータの一部として登録するマスターデータ登録処理プログラムや、真贋の判定対象の物品の表面を撮影し、撮影して得た画像から物品表面のランダムパターンの特徴を示す特徴情報としての特徴画像を抽出して、この特徴画像をサンプルデータとして、このサンプルデータを予め登録されているマスターデータに含まれる特徴画像と比較することにより物品の真贋を判定する真贋判定処理プログラムが含まれている。
【0032】
なお、ここで言う物品表面のランダムパターンとは、外部から撮影される物品の再現不能な微細な特徴をいう。例えば、外側が下層の微細な特徴が撮影される程度に透明な保護膜で覆われている物品の場合には、透明な保護膜自体に現れている再現不能な微細な特徴と、透明な保護膜の下層に現れている再現不能な微細な特徴の双方の特徴を含む。具体的に例示すると、現在金融機関等で広く使用されているキャッシュカードやクレジットカード等のカードが挙げられる。このカードには、例えばラメ状の微細な地紋が現れた塗装の上に、ハードコート等の透明層が固着されているタイプのものがある。従って、このような物品の場合には、保護膜自体に現れた凹凸等の微細なランダムパターンと、保護膜の下層の微細な地紋(ランダムパターン)との双方が含まれる。
【0033】
本実施の形態では、真贋判定対象の物品として、用紙28を例に挙げて説明するが、これに限らず、例えばプラスチックカードにテープ状(ストライプ)の磁気記録媒体を貼り付けたキャッシュカードやクレジットカード等の磁気カード(以下、カード)などの物品として流通する固体であれば如何なるものであっても良い。
【0034】
RAM14は、ワークメモリであって、撮影された画像やこの画像から抽出した特徴画像等を一時的に記憶する領域を含む。二次記憶部18は、装置の電源スイッチが切られても保持しなければならない各種情報を記憶するものであり、例えばハードディクス装置及びフラッシュメモリなどが適用される。UIパネル20は、ディスプレイ上に透過型のタッチパネルが重ねられたタッチパネルディスプレイ等から構成され、各種情報がディスプレイの表示面に表示されると共に、ユーザによってタッチパネルが触れられることにより各種情報や指示を受け付ける。
【0035】
CPU12、RAM14、ROM16、二次記憶部18及びUIパネル20は互いにシステムバス26を介して接続されている。従って、CPU12は、RAM14、ROM16、及び二次記憶部18へのアクセスと、UIパネル20への各種情報の表示と、UIパネル20に対するユーザの操作指示内容の把握と、を各々行う。
【0036】
外部I/F22は、外部装置30に接続されており、外部装置30とデータの授受を行うためのインタフェースである。外部I/F22もまたシステムバス26に接続されている。従って、CPU12は、外部I/F22を介して外部装置30に用紙28の特徴画像を登録させるために、用紙28の特徴画像を送信したり、外部I/F22を介して外部装置30から登録済の用紙28の特徴画像を真贋判定装置10で使用するために受信したりする。
【0037】
内部I/F24は、光源32及びカメラ34に接続されており、光源32及びカメラ34とデータの授受を行うためのインタフェースである。光源32は、予め定められた波長域の光を照射するものであり、予め定められた位置に配置された用紙28の表面に対して斜め方向から光を照射して用紙28の表面を照明するように配置されている。光源32としては、例えば、LED、ハロゲンランプ、蛍光灯、又はキセノン放電管などが適用される。カメラ34は、光源32から照射された光によって照明された用紙28の表面の予め定められた領域を被写体として撮影して画像を取得する。なお、真贋判定装置10におけるカメラ34の位置及び向きは固定されている。
【0038】
内部I/F24もまたシステムバス26に接続されている。従って、CPU12は、内部I/F24を介した光源32の点灯タイミング(光の照射タイミング)の制御と、光源32の点灯状態の把握と、内部I/F24を介したカメラ34の撮影タイミングの制御と、カメラ34によって撮影されて得られた画像の取得と、を各々行う。
【0039】
用紙搬送部36は、用紙28の予め定められた領域が予め定められた向きでカメラ34によって撮影されるように用紙28を予め定められた位置(以下、「撮影位置」という。)に搬送するものである。用紙搬送部36もまたシステムバス26に接続されている。従って、CPU12は、用紙搬送部36の制御及び用紙搬送部36の動作状態の把握を行う。
【0040】
図2には、本実施の形態に係る真贋判定装置10による真贋判定の対象とされる用紙28の形態例が示されている。図2に示すように、用紙28は、長方形状であり、その中央部には用紙28の外輪郭から予め定められた距離(例えば5mm)だけ内側にオフセットされることで形成された領域であって、プリンタなどによって画像が形成される長方形状の画像形成領域が設けられている。また、用紙28において、長手方向をX方向とし、短手方向をY方向とした場合、用紙28の長手方向の一辺とその一辺に隣接する画像形成領域の一辺とで挟まれる余白領域には、各々カメラ34によって撮影される複数(ここでは、一例として6個)の予め定められた領域40がX方向に沿って設けられている。なお、図2に示す例では説明の便宜上、破線を用いて画像形成領域及び予め定められた領域40を描いたが、実際の用紙28には破線が描かれているわけではない。
【0041】
図3には、光源32によって用紙28の表面の予め定められた領域40に光が照射された状態でカメラ34により1つの予め定められた領域40を撮影している状態の一例が示されている。図3に示す例では、カメラ34が、撮影位置に配置された用紙28の予め定められた領域40が被写体とされるように予め定められた領域40の上方に配置されている。また、光源32は、用紙28の表面の予め定められた領域40の平面領域に対して予め定められた傾斜角度から予め定められた領域40を照明するように配置され、光源32からは予め定められた波長域の光が発せられる。光源32から発せられた光が予め定められた領域40に含まれるランダムパターンを構成している微細な凸凹のパターンの凸部40aに当たると、凸部40aの陰影が形成される。カメラ34は凸部40aの陰影を含むランダムパターンを有する予め定められた領域40を撮影する。なお、本実施の形態では、凸部40aの陰影が形成されるように予め定められた領域40の平面領域に対して30度斜め上方から光を照射する場合の形態例を挙げて説明しているが、これに限らず、凸部40aの陰影が形成されるように光を照射する位置であれば如何なる位置に光源32を配置しても良い。
【0042】
[真贋判定装置の動作]
次に、真贋判定装置10の動作を説明する。用紙28の真贋を判定するためには、本物とされる用紙28が有するランダムパターンの特徴を予め登録しておく必要がある。そこで、先ず、図4〜図9を参照して、真贋判定装置10において実行されるマスターデータ登録処理について説明する。なお、このマスターデータ登録処理は、ROM16に記憶されているマスターデータ登録処理プログラムがCPU12によって実行されることで実現される。
【0043】
図4は、本実施の形態に係るマスターデータ登録処理プログラムの処理の流れの一例を示すフローチャートである。なお、以下の説明では、錯綜を回避するために、真贋の判定対象とされる用紙28と比較される用紙28(真贋の判定の基準となる用紙28)が撮影位置に配置されている場合について説明する。
【0044】
図4のステップ100では、予め定められた領域40に対する光の照射開始を光源32に指示した後、ステップ102に移行する。上記ステップ100の処理に応じて、光源32は、予め定められた領域40に対して光の照射を開始する。ステップ102では、カメラ34に対して撮影開始を指示した後、ステップ104に移行する。上記ステップ102の処理に応じて、カメラ34は、予め定められた領域40を被写体として撮影を開始する。なお、ここでは、一例として、画像が400dpiの解像度で撮影されるものとする。ステップ104では、予め定められた領域40の撮影が終了するまで待機する。カメラ34が予め定められた領域40を撮影して画像を取得すると、ステップ104は肯定判定となってステップ106に移行する。ステップ106では、光源32に対して予め定められた領域40に対する光の照射終了を指示した後、ステップ108に移行する。上記ステップ106の処理に応じて、光源32は、予め定められた領域40に対して光の照射を終了する。
【0045】
ステップ108では、特徴画像抽出処理を実行する。ここで、図5を参照して、特徴画像抽出処理を実行しているときの真贋判定装置10の作用を説明する。なお、図5は、CPU12により実行される特徴画像抽出処理プログラムの処理の流れの一例を示すフローチャートであり、この特徴画像抽出処理プログラムはROM16に予め記憶されている。
【0046】
図5のステップ108Aでは、上記ステップ102,104の処理によってカメラ34に取得させた画像に対して量子化を実施する。つまり、撮影によって得られた画像を予め定められた個数のピクセルとしてのメッシュ(例えばメッシュ数d=縦M×横N)に区切ることによって量子化を実施する。そして、ステップ108Bでは、各メッシュをある濃度値(濃度レベルq)で代表させることで標本化を実施することにより特徴画像を抽出する。
【0047】
なお、本実施の形態では、上記ステップ108Bにおいて、標本化して得られた特徴画像を行列で記述しているが、これに限らず、j番目のメッシュの濃度をXjとして、特徴画像のランダムパターンを、X=(X1,X2,・・・・・Xd)t(tは転置を表す)なる特徴ベクトルで記述しても良い。この場合、この特徴ベクトルを特徴画像を表す情報として用いる。この特徴ベクトルの各要素は対応するピクセル毎に濃度を与える。従って、特徴画像のランダムパターンは特徴ベクトルによって張られた特徴空間上の1点として表されることになる。前述したように、用紙28は、微視的には異なるランダムパターンを有するため、特徴ベクトルも用紙28毎に固有の特徴を表すものとなる。すなわち、各用紙28のランダムパターンの特徴が特徴ベクトルによって表現されることになる。
【0048】
次のステップ108Cでは、上記ステップ108Bの処理によって得られた特徴画像をRAM14の予め定められた記憶領域αに記憶した後、本特徴画像抽出処理プログラムを終了してマスターデータ登録処理プログラムのステップ110に移行する。
【0049】
ステップ110では、RAM14の予め定められた記憶領域αから特徴画像を読み出し、読み出した特徴画像から圧縮対象画像を切り出す。次のステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元フーリエ変換(FT:Fourier Transform)又は二次元高速フーリエ変換(FFT:Fast Fourier Transform)を行って得られた結果を解析することにより圧縮対象画像の圧縮方向及び圧縮率を決定する。つまり、ステップ112では、上記ステップ110の処理で切り出された圧縮対象画像に対して二次元FT又はFFTを行って得られた結果を解析することにより情報の連続性の高い方向と情報の連続性の低い方向とを特定し、連続性の低い方向を特徴画像の圧縮方向とし、連続性を高い方向に近付けるように圧縮率を決定する。例えば、上記ステップ110の処理で切り出された圧縮対象画像が図6に示すように矩形状であって二次元座標系で定められた場合、圧縮対象画像に対して二次元FT又はFFTを行うと、一例として図7に示すように表される。この場合、一例として図8に示すように情報の連続性が低い方向(情報量の少ない方向A)と情報の連続性が高い方向(情報量の多い方向B)とが特定され、連続性の低い方向Aが特徴画像の圧縮方向とされる。圧縮率は、情報量の少ない方向Aの情報の連続性が情報量の多い方向Bの情報の連続性に近付くように決定される。なお、本実施の形態では、情報量の少ない方向Aの情報の連続性が情報量の多い方向Bの情報の連続性に最も近似する圧縮率(予め定められた誤差内で一致する圧縮率)を採用しているが、これに限らず、圧縮対象画像に対して行った二次元FT又はFFTの結果における情報量の連続性に係る異方性を少なくとも現時点よりも弱める圧縮率を採用すれば良い。
【0050】
次のステップ114では、上記ステップ110の処理で切り出した圧縮対象画像を、上記ステップ112の処理で決定された圧縮方向に、上記ステップ112の処理で決定された圧縮率で圧縮(予め定められた固定値の変換マトリクスを用いて1次変換)した後、ステップ116に移行する。上記ステップ114の処理によって例えば図6に示す圧縮対象画像が図8に示す情報量の少ない方向Aに圧縮されると、一例として図9に示す画像が得られる。
【0051】
ステップ116では、上記ステップ114の処理で圧縮されて得られた圧縮済みの画像から真贋判定用の基準画像を切り出した後、ステップ118に移行する。上記ステップ116の処理で切り出された基準画像の一例が図10に示されている。図10に示すように上記ステップ114の処理で圧縮対象画像が圧縮されることにより、情報量の連続性に係る方向の異方性(情報密度の不均一性)が軽減したことが判る。つまり、図6に示す圧縮対象画像(圧縮前の画像)では、用紙28の繊維形状が左下から右上へと流れる流線形の模様が現れているのに対し、図10に示す基準画像では、そのような特定方向へ流れる流線形の模様が見え難くなっていることが判る。
【0052】
ステップ118では、上記ステップ112の処理で決定された圧縮方向及び圧縮率並びに上記ステップ116の処理で切り出された基準画像を関連付けた情報をマスターデータとして二次記憶部128に個々の予め定められた領域40毎に記憶することにより登録した後、ステップ120に移行する。
【0053】
ステップ120では、全ての予め定められた領域40(本実施の形態では6個の予め定められた領域40)を撮影したか否かを判定し、否定判定となった場合にはステップ122に移行し、未撮影の1つの予め定められた領域40が撮影される撮影位置に用紙28を搬送するように用紙搬送部36を制御した後、ステップ100に戻る。ステップ120において肯定判定となった場合には本マスターデータ登録処理を終了する。
【0054】
次に、図11を参照しながら用紙28の真贋を判定する動作について説明する。本実施の形態に係る真贋判定装置10では、用紙28の真贋を判定する場合にCPU12によって真贋判定処理プログラムが実行される。図11は、本実施の形態に係る真贋判定処理プログラムの処理の流れの一例を示すフローチャートである。なお、以下の説明では、錯綜を回避するために、真贋の判定対象とされる用紙28が撮影位置に配置されている場合について説明する。
【0055】
図11のステップ200では、上記ステップ100の処理に相当する処理を実行した後、ステップ202に移行する。ステップ202では、上記ステップ102の処理に相当する処理を実行した後、ステップ204に移行する。ステップ204では、上記ステップ104の処理に相当する処理を実行した後、ステップ206に移行する。ステップ206では、上記ステップ106の処理に相当する処理を実行した後、ステップ208に移行する。ステップ208では、上記ステップ108の処理に相当する処理を実行した後、ステップ210に移行する。なお、上記ステップ208では、図5に示すフローチャートの処理を実行することになるが、この場合、ステップ108Bでは、真贋の判定対象とされる用紙28の予め定められた領域40の特徴画像をサンプルデータとして抽出する。
【0056】
ステップ210では、RAM14の予め定められた記憶領域αからサンプルデータを読み出し、読み出したサンプルデータから圧縮対象画像を切り出した後、ステップ212に移行する。ステップ212では、二次記憶部18からマスターデータを読み出した後、ステップ214に移行する。ステップ214では、上記ステップ210の処理で切り出された圧縮対象画像を、上記ステップ212の処理によって読み出されたマスターデータに含まれる圧縮方向に、上記ステップ212の処理によって読み出されたマスターデータに含まれる圧縮率で圧縮した後、ステップ216に移行する。ステップ216では、上記ステップ214の処理で圧縮されて得られた圧縮済みの画像から真贋判定対象画像を切り出した後、ステップ218に移行する。なお、切り出し形状及び大きさは、上記ステップ116の処理で切り出された基準画像の外輪郭の形状及び大きさとする。
【0057】
ステップ218では、“上記ステップ212の処理によって読み出されたマスターデータに含まれる基準画像”≒“上記ステップ216の処理で切り出された真贋判定対象画像”という関係が成立しているか否かを判定し、肯定判定となった場合にはステップ220に移行する一方、否定判定となった場合にはステップ222に移行する。
【0058】
ステップ220では、真贋の判定対象とされた用紙28が本物であることを示す本物通知信号を出力した後、本真贋判定処理プログラムを終了する。ステップ222では、真贋の判定対象とされた用紙28が偽物であることを示す偽物通知信号を出力した後、本真贋判定処理プログラムを終了する。
【0059】
本実施の形態では、上記ステップ220の処理によって出力された本物通知信号の出力先及び上記ステップ222の処理によって出力された偽物通知信号の出力先を共にUIパネル20としている。本実施の形態に係るUIパネル20では、上記ステップ220の処理によって出力された本物通知信号を受けて、例えば用紙28が本物であることを示すメッセージ(例えば「用紙は本物です。」)を表示し、上記ステップ222の処理によって出力された偽物通知信号を受けて、例えば用紙28が偽物であることを示すメッセージ(例えば「用紙は偽物です。」)を表示する。なお、この表示形態は一例であり、この他の表示形態であっても良い。例えば、スピーカによって音声で真贋の判定結果を可聴表示したり、プリンタによって用紙に印字することで真贋の判定結果を永久可視表示したりしても良い。また、UIパネル20による可視表示、スピーカによる可聴表示、及びプリンタによる永久可視表示の少なくとも2表示形態を組み合わせても良い。また、真贋の判定結果を可読性を有する文字情報として表示する形態に限らず、真贋の判定結果を暗号化した上でバーコードやQRコードなどに画像化して出力するようにしても良い。また、上記ステップ220の処理によって出力された本物通知信号の出力先及び上記ステップ222の処理によって出力された偽物通知信号の出力先を外部装置30とし、外部装置30の記憶領域に本物通知信号及び偽物通知信号を記憶させても良い。
【0060】
以上のように、本実施の形態に係る真贋判定装置10によれば、例えば圧縮しない1枚の特徴画像を記憶するために要する記憶領域の容量で、複数の異なる予め定められた領域40に関する特徴画像(複数枚の特徴画像)が記憶されるので、本実施の形態に係る真贋判定装置10を用いない場合に比べ、用紙28の真贋が高精度に判定される。
【0061】
なお、上記実施の形態では、二次元FT又はFFTを行う際に特徴画像に対して二次元座標系を適用した場合の形態例を挙げて説明したが、例えば図12に示すように表面に樹木の年輪のような連続的な同心円状の模様を有する物品、表面に連続的な放射状の模様を有する物品、又は表面に渦巻状の流線形の模様を有する物品に対しては、極座標系を適用することが好ましい。これにより、少なくとも二次元座標系を適用した場合に比べ、連続性の有無(又は高低)が高精度に判定されることになる。
【0062】
また、上記実施の形態では、真贋の判定対象とされる用紙28が共通の製造方法及び製造ラインで製造されたことを前提として、真贋の判定対象とされる用紙28(サンプルデータの取得用の用紙28)とこの用紙28の真贋を判定するための基準として用いられる用紙28(マスターデータの取得用の用紙28)とを異なる用紙とし、真贋の判定対象とされる個々の用紙28に対して、真贋を判定するための基準の用紙28として共通の用紙28を適用した場合の形態例を挙げて説明したが、真贋の判定対象とされる個々の用紙28が互いに異なる製造方法や異なる製造ラインで製造された用紙である場合、上記実施の形態で説明したようにサンプルデータの取得用の用紙28の各々に対して、真贋を判定するための基準の用紙28として共通の用紙28を用いるよりも、サンプルデータの取得用の用紙28をマスターデータの取得用の用紙28として用いる方が真贋の判定精度が高められる。つまり、真贋の判定対象毎にその判定対象そのもの自体を基準の用紙28として扱うことである。そこで、この場合、図4に示すフローチャートの上記ステップ130の処理において、マスターデータを、マスターデータの抽出対象とされている用紙28を特定する特定情報と対応付けて二次記憶部18に記憶することにより登録する。そして、判定対象とされる用紙28の真贋を判定する際に実行される真贋判定処理プログラムにおいて、上記ステップ200の前段階に、特定情報に対応する情報(ID)を受け付けるステップを挿入し、上記ステップ212において、上記ステップ200の前段階のステップで受け付けられた特定情報に対応する情報を用いて対応するマスターデータを二次記憶部18から読み出すようにすれば良い。
【0063】
また、上記実施の形態では、特徴画像における情報の連続性を解析するために二次元FT又はFFTを適用したが、これに限らず、ウェーブレット解析を適用しても良い。
【0064】
また、上記実施の形態では、特徴画像における情報の連続性の高い方向を二次元FT又はFFTを実施することで特定する形態例を挙げて説明したが、これに限らず、方向によって情報の連続性が異なっており、事前に連続性の高い方向が判っている場合は、例えば事前にUIパネル20を介して連続性の高い方向を指定しておき、その方向について情報を圧縮するようにしても良い。この場合、二次記憶部18に圧縮方向(連続性の高い方向として指定された方向)を示す情報を予め記憶しておき、その情報により示される圧縮方向に圧縮を実施すれば良い。
【0065】
また、上記実施の形態では、複数個の予め定められた領域40を撮影することによって得られた複数の画像の各々から特徴画像を抽出し、抽出した特徴画像を用いて真贋の判定を行う場合の形態例を挙げて説明したが、これに限らず、1つの予め定められた領域40を撮影することによって得られた1つの画像から特徴画像を抽出し、抽出した特徴画像を用いて真贋の判定を行うようにしても良い。この場合、上記実施の形態に比べ、特徴画像を記憶するために要する記憶領域の容量が削減される。
【0066】
また、上記実施の形態では、用紙28をX軸方向に搬送して撮影位置に配置することによって撮影対象である予め定められた領域40をカメラ34の撮影領域に含まれるようにしたが、これに限らず、用紙28を搬送せずに固定し、カメラ34をX軸方向に移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにしても良い。また、用紙28及びカメラ28をX軸方向に沿って互いに反対の向きに移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにしても良い。このように用紙28及びカメラ34の少なくとも一方を相対移動させることによって予め定められた領域40をカメラ34の撮影領域に含まれるようにすれば良い。
【0067】
また、上記実施の形態では、CPU12によってマスターデータ登録処理プログラム及び真贋判定処理プログラムが実行されることによりマスターデータ登録処理プログラム及び真贋判定処理プログラムの各ステップの処理を実現するソフトウェア的な形態を例示したが、これに限らず、各種回路(一例として、ASIC(Application Specific Integrated Circuit))を接続して構成されるハードウェア的な形態や、ソフトウェア的な形態とハードウェア的な形態とを組み合わせた形態が挙げられる。
【0068】
また、上記実施の形態では、マスターデータ登録処理プログラム及び真贋判定処理プログラムがROM16に予め記憶されている場合の形態例を挙げて説明したが、これに限らず、これらのプログラムをCD−ROMやDVD−ROM、USBメモリなどのコンピュータによって読み取られる記録媒体に格納した状態で提供する形態を適用しても良いし、有線又は無線による通信手段を介して配信する形態を適用しても良い。
【符号の説明】
【0069】
10 真贋判定装置
12 CPU
18 二次記憶部
32 光源
34 カメラ
【特許請求の範囲】
【請求項1】
無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段と、
前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段と、
を含む真贋判定支援装置。
【請求項2】
前記取得手段は、前記特徴の陰影が生じるように前記領域に光を照射する照射手段、及び前記照射手段によって光が照射された状態で前記領域を撮影する撮影手段を有し、
前記特徴情報の連続性を、前記撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性とした請求項1に記載の真贋判定支援装置。
【請求項3】
前記圧縮手段は、前記取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有し、前記記憶手段に記憶されている連続性情報により示される連続性が高い方向の特徴情報を圧縮する請求項1又は請求項2に記載の真贋判定支援装置。
【請求項4】
前記圧縮手段は、前記複数の方向毎の特徴情報に対して周波数分析を行う分析手段を更に有し、
前記連続性情報を前記分析手段での分析結果とした請求項3に記載の真贋判定支援装置。
【請求項5】
前記領域内での前記特徴の位置を二次元座標系で規定した請求項1〜請求項4の何れか1項に記載の真贋判定支援装置。
【請求項6】
前記領域内での前記特徴の位置を極座標系で規定した請求項1〜請求項4の何れか1項に記載の真贋判定支援装置。
【請求項7】
前記固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて記憶した圧縮率記憶手段と、
前記特定情報に対応する情報を受け付ける受付手段と、を更に含み、
前記圧縮手段は、前記受付手段によって前記特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を前記圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた前記特徴情報を圧縮する請求項1〜請求項6の何れか1項に記載の真贋判定支援装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、
前記取得手段は、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得し、
前記圧縮手段は、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮し、
前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段を含む真贋判定装置。
【請求項9】
コンピュータを、
無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段、及び
前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段として機能させるための真贋判定支援プログラム。
【請求項10】
請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含んで構成された真贋判定装置を制御するコンピュータを、
真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得する前記取得手段、
前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮する前記圧縮手段、及び
前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段として機能させるための真贋判定プログラム。
【請求項1】
無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段と、
前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段と、
を含む真贋判定支援装置。
【請求項2】
前記取得手段は、前記特徴の陰影が生じるように前記領域に光を照射する照射手段、及び前記照射手段によって光が照射された状態で前記領域を撮影する撮影手段を有し、
前記特徴情報の連続性を、前記撮影手段によって撮影されて得られた画像から特定される明暗の連続性を含む連続性とした請求項1に記載の真贋判定支援装置。
【請求項3】
前記圧縮手段は、前記取得手段によって取得された特徴情報の複数の方向毎の連続性を示す連続性情報を記憶する記憶手段を有し、前記記憶手段に記憶されている連続性情報により示される連続性が高い方向の特徴情報を圧縮する請求項1又は請求項2に記載の真贋判定支援装置。
【請求項4】
前記圧縮手段は、前記複数の方向毎の特徴情報に対して周波数分析を行う分析手段を更に有し、
前記連続性情報を前記分析手段での分析結果とした請求項3に記載の真贋判定支援装置。
【請求項5】
前記領域内での前記特徴の位置を二次元座標系で規定した請求項1〜請求項4の何れか1項に記載の真贋判定支援装置。
【請求項6】
前記領域内での前記特徴の位置を極座標系で規定した請求項1〜請求項4の何れか1項に記載の真贋判定支援装置。
【請求項7】
前記固体を特定する特定情報と該固体に対して一意に定められた圧縮率とを対応付けて記憶した圧縮率記憶手段と、
前記特定情報に対応する情報を受け付ける受付手段と、を更に含み、
前記圧縮手段は、前記受付手段によって前記特定情報に対応する情報が受け付けられ、受け付けられた情報に対応する特定情報に対応付けられた圧縮率を前記圧縮率記憶手段から取得し、取得した圧縮率で、圧縮対象とされた前記特徴情報を圧縮する請求項1〜請求項6の何れか1項に記載の真贋判定支援装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含み、
前記取得手段は、真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得し、
前記圧縮手段は、前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮し、
前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段を含む真贋判定装置。
【請求項9】
コンピュータを、
無作為性を有する固有の特徴を表面に備えた固体の該表面の定められた領域を前記特徴の連続性が所定方向に生じるように撮影することによって該領域に含まれる前記特徴を示す特徴情報を取得する取得手段、及び
前記取得手段によって取得された特徴情報の連続性が高い方向について該特徴情報を圧縮する圧縮手段として機能させるための真贋判定支援プログラム。
【請求項10】
請求項1〜請求項7の何れか1項に記載の真贋判定支援装置を含んで構成された真贋判定装置を制御するコンピュータを、
真贋の判定基準とされる固体である基準対象固体及び真贋の判定対象とされる固体である判定対象固体の各々について前記特徴情報を取得する前記取得手段、
前記取得手段によって取得された前記基準対象固体及び前記判定対象固体の各々の特徴情報を、前記連続性が高い方向について圧縮する前記圧縮手段、及び
前記取得手段によって取得された前記判定対象固体の前記圧縮手段によって圧縮された特徴情報が、前記取得手段によって取得された前記基準対象固体の前記圧縮手段によって圧縮された特徴情報に相当する場合に前記判定対象固体が偽物でないことを示す信号を出力し、相当しない場合に前記判定対象固体が偽物であることを示す信号を出力する出力手段として機能させるための真贋判定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図11】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図2】
【図3】
【図4】
【図5】
【図11】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【公開番号】特開2013−15898(P2013−15898A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−146408(P2011−146408)
【出願日】平成23年6月30日(2011.6.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.QRコード
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年6月30日(2011.6.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.QRコード
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
[ Back to top ]