
眼内レンズ度数決定装置及びプログラム
【課題】 精度の高いIOL度数の決定をすることができる。
【解決手段】 被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、を備える。
【解決手段】 被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、白内障手術によって眼内に挿入される眼内レンズの度数を決定する眼内レンズ度数決定するための装置及びプログラムに関する。
【背景技術】
【0002】
白内障手術において、水晶体核の除去後に被検眼の眼内に挿入される眼内レンズ(以下、IOL)のパワー(以下、度数)を決定(算出)するために、被検眼を測定して角膜屈折力と眼軸長等の被検者特有の眼特性データを得る。これを基礎とし、経験もしくは論理によって作成されたIOL計算式に従って、IOLの度数を算出する。IOL計算式は、SRK式、SRK/T式、等が周知である(特許文献1参照)。
【0003】
各IOL計算式では、予め定められたレンズ定数(例えば、A定数)が使用される。レンズ定数は、IOLメーカーによってIOLのモデル(型番)毎に設計的に定められている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2007−505716号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、IOL計算式のうち予測前房深度を求める部分は臨床データに基づいており、算出されるIOL度数は、標準的な眼球形状から外れる眼に対して、精度が悪くなることがある。
【0006】
SRK/T式を例にとると、予測術後前房深度の値は、多くの臨床データに基づいて導出された計算式によって算出される。また、SRK/T式では、予想術後前房深度を算出する際、A定数、角膜曲率半径、眼軸長を用いて算出を行うが、眼球形状から理論的に求める項と、臨床データに基づいて経験的に求める項の足し合わせによって算出される。しかしながら、上記のような従来の手法では、予想術後前房深度に関して誤差が大きくなる場合があり、IOL度数に誤差が生じる要因となっている。
【0007】
本発明は、上記問題点を鑑み、精度の高いIOL度数の決定をすることができる装置及びプログラムを提供することを技術課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は以下のような構成を備えることを特徴とする。
【0009】
(1) 被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、前記前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、該予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、を備えることを特徴とする。
(2) 前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいて前記オフセット距離を算出することを特徴とする(1)の眼内レンズ度数決定装置。
(3) 前記度数計算ユニットは、被検眼水晶体の形態情報として水晶体前面情報、水晶体後面情報、水晶体厚情報の少なくともいずれかを含む形態情報を得て、取得された該形態情報に基づいて前記オフセット距離を算出することを(2)の眼内レンズ度数決定装置。
(4) 前記前眼部撮像デバイスは、チン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における前記接点部分を処理して前記オフセット距離を求める(1)の眼内レンズ度数決定装置。
(5) 前記前眼部撮像デバイスは、毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における毛様体の位置情報に基づいて、前記オフセット距離を求める(1)の眼内レンズ度数決定装置。
(6) 前記前眼部撮像デバイスは、前眼部の3次元断面像を取得する前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までの前記オフセット距離を3次元的に求める(1)〜(5)のいずれかの眼内レンズ度数決定装置。
(7) 前記度数計算ユニットは、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する(1)〜(6)のいずれかの眼内レンズ度数決定装置。
(8) 前記前眼部撮像デバイスは、光コヒーレンストモグラフィーデバイス又はシャインプルークカメラ又は超音波プローブのいずれかである(1)〜(7)のいずれかの眼内レンズ度数決定装置。
(9) 前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求める第1ステップと、眼の前房深度に、第1ステップで求められた前記オフセット距離を加えることにより予測術後前房深度を算出する第2ステップと、第2ステップで算出された前記予測術後前房深度を用いて眼内レンズの度数計算を行う第3ステップと、をコンピュータに実行させる。
【発明の効果】
【0010】
本発明によれば、精度の高いIOL度数の決定をすることができる。
【発明を実施するための形態】
【0011】
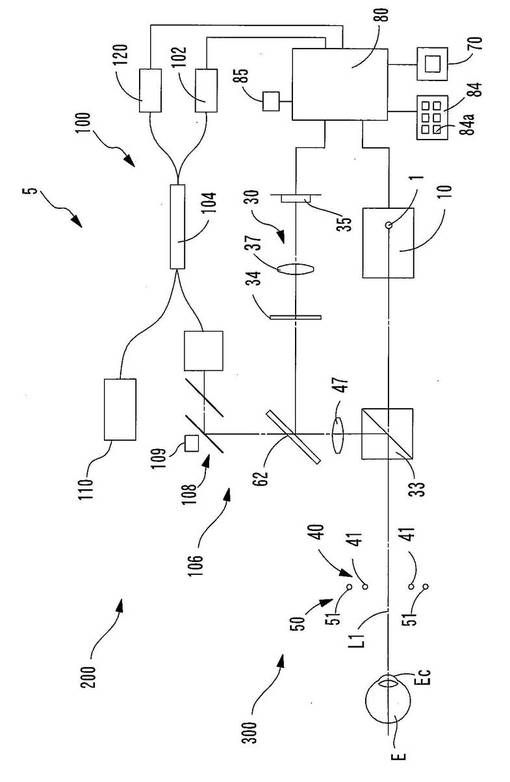
以下、本発明に係る実施形態を図面に基づいて説明する。図1は本実施形態に係る眼内レンズ度数決定システム200の光学系について示す概略構成図である。なお、以下の光学系は、図示無き筐体に内蔵されている。また、その筐体は、周知のアライメント移動機構の駆動により、操作部材(例えば、ジョイスティック)を介して被検眼Eに対して3次元的に移動される。なお、以下の説明においては、なお、本実施形態においては、被検者眼(眼E)の軸方向をZ方向、水平方向をX方向、鉛直方向をY方向として説明する。眼底の表面方向をXY方向として考えても良い。
【0012】
以下の説明においては、光コヒーレンストモグラフィーデバイス(OCTデバイス)5と、眼軸長測定デバイス10と、角膜形状測定デバイス300と、を備えた眼内レンズ度数決定システム200を例に挙げて説明する。
【0013】
OCTデバイス5は、被検眼Eの断面像を撮影するための前眼部撮像デバイスとして用いられる。眼軸長測定デバイス10は、眼Eの眼軸長測定を測定するために用いられる。角膜形状測定デバイス300は、角膜形状を測定するために用いられる。なお、OCTデバイス5は、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスを例にとって説明する。
【0014】
OCTデバイス5は、干渉光学系(OCT光学系)100を備えている。OCT光学系100は、眼Eに測定光を照射する。OCT光学系100は、前眼部上(例えば、水晶体)から反射された測定光と,参照光との干渉状態を受光素子(検出器120)によって検出する。OCT光学系100は、前眼部上の撮像位置を変更するため、前眼部上における測定光の照射位置を変更する照射位置変更ユニット(例えば、光スキャナ108)を備える。制御部80は、設定された撮像位置情報に基づいて照射位置変更ユニットの動作を制御し、検出器120からの受光信号に基づいて断層画像を取得する。
【0015】
OCT光学系100は、いわゆる眼科用光断層干渉計(OCT:Optical coherence tomography)の装置構成を持つ。OCT光学系100は、測定光源102から出射された光をカップラー(光分割器)104によって測定光(試料光)と参照光に分割する。そして、OCT光学系100は、測定光学系106によって測定光を前眼部に導き,また、参照光を参照光学系110に導く。その後、前眼部によって反射された測定光と,参照光との合成による干渉光を検出器(受光素子)120に受光させる。
【0016】
光源102から出射された光は、カップラー104によって測定光束と参照光束に分割される。そして、測定光束は、光ファイバーを通過した後、空気中へ出射される。その光束は、光スキャナ108、及び測定光学系106の他の光学部材を介して前眼部に集光される。そして、前眼部で反射された光は、同様の光路を経て光ファイバーに戻される。
【0017】
光スキャナ108は、眼E上でXY方向(横断方向)に測定光を走査させる。光スキャナ108は、例えば、2つのガルバノミラーであり、その反射角度が駆動機構109によって任意に調整される。
【0018】
これにより、光源102から出射された光束はその反射(進行)方向が変化され、眼E上で任意の方向に走査される。これにより、前眼部上における撮像位置が変更される。光スキャナ108としては、光を偏向させる構成であればよい。例えば、反射ミラー(ガルバノミラー、ポリゴンミラー、レゾナントスキャナ)の他、光の進行(偏向)方向を変化させる音響光学素子(AOM)等が用いられる。
【0019】
参照光学系110は、眼Eでの測定光の反射によって取得される反射光と合成される参照光を生成する。参照光学系110は、マイケルソンタイプであってもよいし、マッハツェンダタイプであっても良い。参照光学系110は、例えば、反射光学系(例えば、参照ミラー)によって形成され、カップラー104からの光を反射光学系により反射することにより再度カップラー104に戻し、検出器120に導く。他の例としては、参照光学系110は、透過光学系(例えば、光ファイバー)によって形成され、カップラー104からの光を戻さず透過させることにより検出器120へと導く。
【0020】
参照光学系110は、参照光路中の光学部材を移動させることにより、測定光と参照光との光路長差を変更する構成を有する。例えば、参照ミラーが光軸方向に移動される。光路長差を変更するための構成は、測定光学系106の測定光路中に配置されてもよい。
【0021】
検出器120は、測定光と参照光との干渉状態を検出する。フーリエドメインOCTの場合では、干渉光のスペクトル強度が検出器120によって検出され、スペクトル強度データに対するフーリエ変換によって所定範囲における深さプロファイル(Aスキャン信号)が取得される。ここで、制御部80は、光スキャナ108により測定光を前眼部上で所定の横断方向に走査することにより断層像を取得できる。すなわち、被検眼の前眼部断層像を撮像する。例えば、X方向もしくはY方向に走査することにより、被検眼前眼部のXZ面もしくはYZ面における断層像(前眼部断層像)を取得できる(なお、本実施形態においては、このように測定光を前眼部に対して一次元走査し、断層像を得る方式をBスキャンとする)。なお、取得された前眼部断層像は、制御部80に接続されたメモリ85に記憶される。さらに、測定光をXY方向に二次元的に走査することにより、被検眼前眼部の三次元画像を取得することも可能である。
【0022】
例えば、フーリエドメインOCTとしては、Spectral-domain OCT(SD−OCT)、Swept-source OCT(SS−OCT)が挙げられる。また、Time-domain OCT(TD−OCT)であってもよい。
【0023】
SD−OCTの場合、光源102として低コヒーレント光源(広帯域光源)が用いられ、検出器120には、干渉光を各周波数成分(各波長成分)に分光する分光光学系(スペクトルメータ)が設けられる。スペクトルメータは、例えば、回折格子とラインセンサからなる。
【0024】
SS−OCTの場合、光源102として出射波長を時間的に高速で変化させる波長走査型光源(波長可変光源)が用いられ、検出器120として、例えば、単一の受光素子が設けられる。光源102は、例えば、光源、ファイバーリング共振器、及び波長選択フィルタによって構成される。そして、波長選択フィルタとして、例えば、回折格子とポリゴンミラーの組み合わせ、ファブリー・ペローエタロンを用いたものが挙げられる。
【0025】
角膜形状測定デバイス300は、ケラト投影光学系50、アライメント投影光学系40、前眼部正面撮像光学系30、に大別される。
【0026】
ケラト投影光学系50は、測定光軸L1を中心に配置されたリング状の光源51を有し、被検眼角膜にリング指標を投影して角膜形状(曲率、乱視軸角度、等)を測定するために用いられる。なお、光源51には、例えば、赤外光または可視光を発するLEDが使用される。なお、投影光学系50について、光軸L1を中心とする同一円周上に少なくとも3つ以上の点光源が配置されていればよく、間欠的なリング光源であってもよい。さらに、複数のリング指標を投影するプラチド指標投影光学系であってもよい。
【0027】
アライメント投影光学系40は、光源51の内側に配置され、赤外光を発する投影光源41(例えば、λ=970nm)を有し、被検眼角膜Ecにアライメント指標を投影するために用いられる。そして、角膜Ecに投影されたアライメント指標は、被検眼に対する位置合わせ(例えば、自動アライメント、アライメント検出、手動アライメント、等)に用いられる。本実施形態において、投影光学系50は、被検者眼角膜Ecに対してリング指標を投影する光学系であって、リング指標は、マイヤーリングも兼用する。また、投影光学系40の光源41は、前眼部を斜め方向から赤外光にて照明する前眼部照明を兼用する。なお、投影光学系40において、さらに、角膜Ecに平行光を投影する光学系を設け、投影光学系40による有限光との組合せにより前後のアライメントを行うようにしてもよい。
【0028】
前眼部正面撮像光学系30は、前眼部正面像を撮像(取得)するために用いられる。前眼部正面撮像光学系30は、ダイクロイックミラー33、対物レンズ47、ダイクロイックミラー62、フィルタ34、撮像レンズ37、二次元撮像素子35、を含み、被検眼の前眼部正面像を撮像するために用いられる。二次元撮像素子35は、被検眼前眼部と略共役な位置に配置されている。
【0029】
前述の投影光学系40、投影光学系50による前眼部反射光は、ダイクロイックミラー33、対物レンズ47、ダイクロイックミラー62、フィルタ34、及び撮像レンズ37を介して二次元撮像素子35に結像される。
【0030】
眼軸長測定デバイス10は、投光光学系と受光光学系が備えられており、投光光学系には、低コヒーレント光を出射する測定光源1が備えられている。そして、光源1から出射された光を測定光と参照光に分割し、少なくとも測定光を被検眼に照射すると共に、被検眼からの反射光と参照光を合成させ、受光素子に入射させる。そして、受光素子から出力される受光信号に基づいて、受光素子によって干渉光が検出されたタイミングを元に、眼軸長が算出される。なお、本実施例では、眼軸長測定光学系10の測定光源は、固視灯を兼ねている。
【0031】
また、例えば、光源1から発せられた光の眼底での反射により取得される眼底反射光の大部分は、ダイクロイックミラー33を透過し、眼軸長測定光学系10の受光素子によって受光される。また、眼底反射光の一部は、ダイクロイックミラー33で反射され、前眼部正面撮像光学系30で結像される。
【0032】
次に、制御系について説明する。制御部80は、装置全体の制御及び測定結果の算出を行う。制御部80は、OCTデバイス5の各部材、眼軸長測定デバイス10の各部材、角膜形状測定デバイス300の各部材、モニタ70、操作部84、メモリ85、等と接続されている。
【0033】
また、本実施形態では、眼軸長測定する眼軸長測定モードと前眼部断面像より前眼部(例えば、角膜形状等)を測定する前眼部測定モードとが用意されている。各モードは、自動又は手動にて切り換えが行われる。
【0034】
また、操作部84には、操作入力部として、マウス等の汎用インターフェースが用いられてもよいし、その他、タッチパネルが用いられてもよい。そして、操作部84には、例えば、眼軸長測定する眼軸長測定モードと前眼部断面像より前眼部(例えば、角膜形状等)を測定する前眼部測定モードを切り換えるためのモード切換スイッチ84aが設けられている。
【0035】
なお、メモリ85には、各種制御プログラムの他、制御部80が眼軸長/角膜形状等を算出するためのソフトウェアプログラム、制御部80がIOL度数を算出するためのソフトウェアプログラム等が記憶されている。
【0036】
<前眼部測定モード>
以上のような構成を備える装置において、その動作について説明する。なお、以下の説明においては、前眼部測定モードについて説明する。検者は、モニタ70に表示される被検眼のアライメント状態を見ながら、図示なきジョイスティック等の操作手段を用いて、装置を上下左右及び前後方向に移動させ、装置を被検眼Eに対して所定の位置関係に置く。この場合、検者は、固視標を被検眼に固視させる。
【0037】
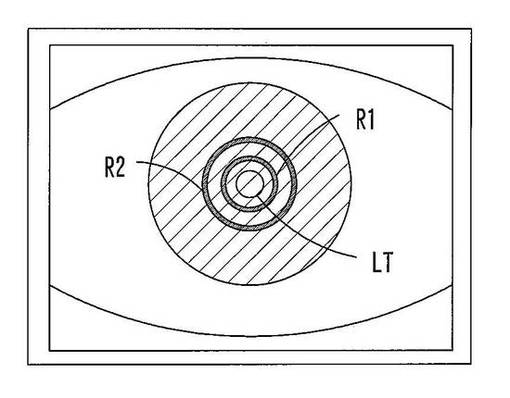
図2は撮像素子35によって撮像された前眼部像が表示された前眼部観察画面を示す図である。アライメントの際には、光源41及び光源51が点灯される。また、OCTデバイス5の光源102が点灯される。ここで、検者は、図2に示すように、電子的に表示されたレチクルLTと、光源41によるリング指標R1と、が同心円状になるように上下左右のアライメントを行う。また、検者は、リング指標R1のピントが合うように、前後のアライメントを行う。なお、リング指標R1の外側には、光源51によるリング指標R2が表示されている。
【0038】
前眼部に対するアライメントが完了されると、制御部80によって、予め設定された走査パターンに基づきOCT光学系100によって、断層像が取得され、取得された断層像がモニタ75上に動画表示される。
【0039】
初めに、角膜形状測定が行われる。なお、本実施形態においては、角膜形状測定デバイス300を用いて、角膜前面における角膜曲率半径が算出され、OCTデバイス5を用いて、角膜後面における角膜曲率半径が算出される。上記のようにしてアライメントが行われ、所定のトリガ信号が発せられると、制御部80は、前眼部像を撮影する。そして、制御部80は、メモリ85に記憶された前眼部画像におけるリング指標像R1及びR2に基づいて被検眼の角膜形状(例えば、強主経線方向及び弱主経線方向における角膜前面の角膜曲率半径、角膜の乱視軸角度、等)をそれぞれ算出し、測定結果をメモリ85に記憶する。
【0040】
次いで、前眼部断面像の撮影を行われる。制御部80は、前眼部断層像を取得し、取得された画像データ(例えば、静止画として)をメモリ85に記憶する。なお、OCT光学系100によって取得される前眼部断層像は、水晶体後面までの範囲の断層像を撮影することができる。このため、制御部80は、取得された前眼部断層像を処理(解析)して、前眼部(本実施形態においては、角膜後面の角膜曲率半径、前房深度、角膜厚、水晶体前面曲率、水晶体後面曲率、水晶体厚)を測定することができる。
【0041】
なお、本実施形態においては、角膜頂点位置と装置の光軸(L1)が一致する位置がアライメントの基準位置として設定され、アライメントが行われる。すなわち、前眼部断層像を取得する際の走査位置について、走査位置が角膜頂点位置を通るようにアライメントされる。
【0042】
<眼軸長測定>
次いで、眼軸長測定モードについて説明する。検者は、モニタ70に表示される被検眼のアライメント状態を見ながら、図示なきジョイスティック等の操作手段を用いて、装置を上下左右及び前後方向に移動させ、装置を被検眼Eに対して所定の位置関係に置く。
【0043】
アライメント完了後、測定開始のトリガ信号が自動又は手動にて出力され、制御部80によって測定光源1が点灯されると、眼軸長測定デバイス10によって測定光が被検眼に照射されると共に、測定光による被検眼からの反射光が眼軸長測定デバイス10の受光素子に入射される。そして、受光素子から出力される受光信号に基づいて、受光素子によって干渉光が検出されたタイミングを元に、眼軸長が算出される。
【0044】
<IOL度数算出>
上記に説明したように、眼軸長測定モードと前眼部測定モードにおける測定が終了すると、制御部80は、取得された測定データに基づいてIOL度数を算出する。
【0045】
IOL度数の算出方法としては、既知であるSRK/T式、Binkhors式等を一部流用する。例えば、SRK/T式を流用する場合、角膜曲率半径、眼軸長、レンズ定数(SRK/T式を用いる場合はA定数と呼ばれる)、のパラメータを用いてIOL度数計算が行われる。
【0046】
制御部80は、OCTデバイス5によって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度にオフセット距離を加えることにより予測術後前房深度を算出し、予測術後前房深度を用いて眼内レンズの度数計算を行う。
【0047】
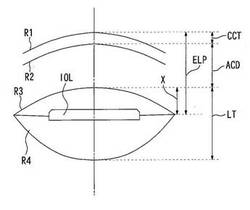
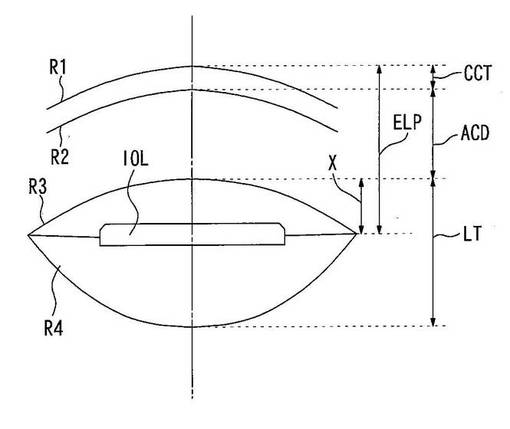
図3を用いて具体的に説明すると、初めに、角膜厚CCTと前房深度ACDから角膜前面から水晶体前面までの角膜高さが算出され、その角膜高さに対し、オフセット量(オフセット距離)X、IOLの種類によって異なる補正量α(A定数の関数)とが足し合わせられることによって、予想術後前房深度ELPが算出される。そして、予想術後前房深度ELP、眼軸長測定結果AL、角膜曲率半径、を用いてIOL度数が算出される。
【0048】
オフセット量Xは、IOLが挿入された後の水晶体前面の位置からIOL支持部の位置(おおよそ、IOLの光学部の位置)までの距離を示している。なお、オフセット量Xは、IOLが水晶体嚢から圧力を受けることによって生じる水晶体後嚢側へのIOLの移動量(上記で示す補正量α)が考慮されておらず、除かれている(詳細は後述する)。IOL支持部の位置は、チン小帯と水晶体との接点部分(例えば、水晶体前面と水晶体後面との交差部分)の位置と同様となる。
【0049】
ここで、角膜厚CCTと前房深度ACDは測定結果であるため誤差は生じにくいが、オフセット量Xは、多くの臨床データに基づくパラメータであるA定数を主として、決定する場合には、誤差が生じやすい。
【0050】
以下に、オフセット量Xをより精度良く算出する方法について説明する。本実施形態において、制御部80は、被検眼水晶体の形態情報として、水晶体前面情報(水晶体前面曲率半径)R3、水晶体後面情報(水晶体後面曲率半径)R4、水晶体厚情報(水晶体厚)LT、の少なくともいずれかを含む形態情報を得て、取得された形態情報に基づいてオフセット距離を算出する。すなわち、オフセット量Xを精度良く算出するためには、被検眼に応じて水晶体のプロファイルを取得する必要がある。
【0051】
初めに、水晶体前面曲率半径R3、水晶体後面曲率半径R4、水晶体厚LTを用いて、チン小帯と水晶体との接点部分の位置を算出する。チン小帯と水晶体との接点部分の位置は、IOLを挿入した際のIOLの支持部が位置する部位となるため、チン小帯と水晶体との接点部分の位置を算出することによって、術後のIOL支持部の位置を算出できる。そして、術後のIOL支持部の位置は、おおよそIOLの位置と同様と扱われるため、術後のIOL支持部の位置を算出することによって、IOLの位置を算出できる。これによって、オフセット量Xが算出できる。
【0052】
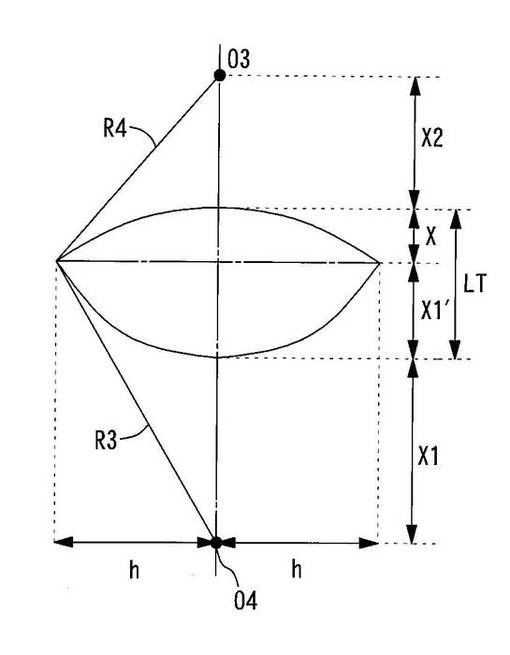
具体的には、オフセット量Xは、以下のようにして求めることができる。図4は、オフセット量Xの算出方法を説明する図である。hは、光軸L1から水晶体のチン小帯と水晶体との接点部分までの距離を示している。X1は、光軸L1における水晶体前面曲率中心O4から水晶体後面までの距離を示している。X1'は、水晶体のチン小帯と水晶体との接点位置から水晶体後面までの距離を示している。X2は、光軸L1における水晶体後面曲率中心O3から水晶体前面までの距離を示している。Xは、水晶体のチン小帯と水晶体との接点位置から水晶体前面までの距離を示しており、オフセット量である。
【0053】
初めに、ピタゴラスの定理により以下の式が成り立つ。
【0054】
【数1】

そして、上記の式において、hが同様であるため、これらの式を展開すると以下の式が成り立つ。
【0055】
【数2】
すなわち、オフセット量Xが実際に測定された測定値を用いて算出されることになるため、より誤差の少ないオフセット量Xを算出することができる。
【0056】
次いで、算出したオフセット量Xより、予想術後前房深度ELPを算出する。予想術後前房深度ELPは、オフセット量X、前房深度ACD、角膜厚CCT、補正量α、に基づいて算出される。
【0057】
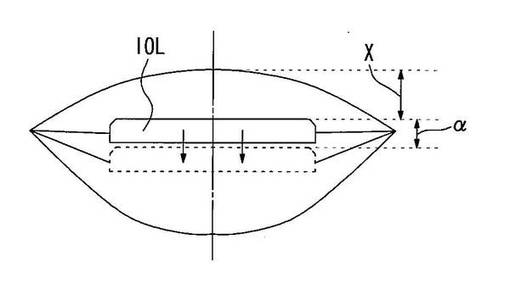
補正量αは、図5に示すように、IOL挿入後に水晶体の嚢の圧力によって、IOLが後嚢側に押し下げられた際に、IOLが移動した量を補正するためのパラメータである。IOLが後嚢側に押し下げられると、IOLは若干、後嚢側に移動する。すなわち、IOLの後嚢側への移動量を補正して、予想術後前房深度ELPを算出することによって、より精度良く予想術後前房深度ELPを算出できる。なお、補正量αは、IOLの構造、材料等によって移動量が異なるため、IOLの種類によって設定されているA定数を用いた周知の関数によって算出される。すなわち、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する。A定数は、予め設定され、メモリ85に記憶されている。
【0058】
予想術後前房深度ELPは、以下のようにして求めることができる。
【0059】
【数3】
以上のように、水晶体の形態情報のような実測値を新たに加えて、オフセット量Xが算出されることにより、精度の高い予想術後前房深度ELPが算出される。そして、予想術後前房深度ELPと眼軸長測定結果ALを用いて、IOL度数を精度良く算出することができる。
【0060】
また、本発明は、角膜前後面の角膜曲率、角膜厚をそれぞれ算出し、実測値にてIOL度数を算出しているため、角膜形状に変化や異常のある被検眼に対しても、精度良くIOL度数を算出することができる。例えば、レーシック術後眼のような角膜形状が変化している被検眼に対して、角膜形状(角膜曲率、角膜厚)の変化が考慮された状態でIOL度数の算出が行われているため、特に有用となる。
【0061】
なお、本発明は、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスにおいて、複数の走査位置にて前眼部断層像を取得することにより3次元形状画像を取得する場合においても適用可能である。OCTデバイス5は、前眼部の3次元断面像(3次元前眼部データ)を取得する前眼部撮像デバイスであって、制御部80は、前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を3次元的に求める。この場合、3次元前眼部データにおける各経線方向毎の角膜前面曲率と角膜後面曲率の平均を算出し、これに基づいてELPを算出する。そして、3次元形状画像より測定値を取得することによって、取得される測定値の精度が良くなる。
【0062】
なお、本実施形態においては、前眼部断面像を撮像する前眼部撮像デバイスとして、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスを例に挙げたがこれに限定されない。光源からの出射光を被検眼前眼部に向けて投光し、前眼部上に光切断面を形成させる投光光学系と、光切断面の前眼部での散乱により取得される前眼部散乱光を含む光を受光する検出器を有する受光光学系と、を有し、検出器からの検出信号に基づいて前眼部断面画像を形成する構成であればよい。すなわち、検眼の前眼部にスリット光を投影し、シャインプルークカメラにより前眼部断面画像を得る装置等にも適用可能である。
【0063】
さらに、シャインプルークカメラを回転させることにより前眼部の3次元形状画像を取得する装置にも適用可能である。この場合、所定の回転角度毎にずれ補正を行うことによって、精度よく前眼部の3次元形状画像を取得することが可能となり、3次元形状画像より取得される測定値の精度が良くなる。この場合、撮像面(スリット断面)に対して垂直な方向の位置ずれが検出され、その検出結果に基づいてずれ補正処理が行われる。
【0064】
また、上記構成においては、光学的に前眼部断面像を取得したが、これに限定されない。被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスであればよい。例えば、Bスキャン用の超音波プローブを用いて前眼部からの反射情報を検出することによって前眼部断面像を取得する構成であればよい。
【0065】
なお、本実施形態においては、IOL度数の算出方法として、既知であるSRK/T式、Binkhors式等のIOL計算式を用いたがこれに限定されない。例えば、光線を用いて、光の反射や屈折の様子を幾何学的に追いかけて、光の振る舞いをシミュレーションする光線追跡法によって、IOL度数を算出することもできる。この場合、予想術後前房深度ELP、角膜厚CCT、眼軸長測定結果AL、角膜前面の角膜曲率半径、角膜後面の角膜曲率半径、を用いて光線追跡法によって、IOL度数を算出する。光線追跡法は、光の反射や屈折をシミュレーションによってIOL度数を算出したものであるため、理論式であるIOL計算式によりも精度良くIOL度数を算出することができる。
【0066】
なお、本実施形態においては、角膜形状測定デバイス300を用いて、角膜前面における角膜曲率半径が算出され、OCTデバイス5を用いて、角膜後面における角膜曲率半径が算出される構成としたがこれに限定されない。OCTデバイス5によって、角膜前後面における角膜曲率半径を算出してもよい。また、角膜前後面の角膜曲率半径を同様の測定値で扱ってもよい。すなわち、角膜形状測定デバイス300で算出した角膜前面における角膜曲率半径が角膜前後面における角膜曲率半径として用いられる。
【0067】
なお、本実施形態において、角膜形状測定デバイス300として、角膜トポグラフィーを用いることもできる。この場合、角膜前面の曲率半径を算出する際に、角膜の全体の形状から角膜前面の曲率半径が算出されるため、角膜前面の曲率半径が精度良く算出される。このため、IOL度数を算出する際に、IOL度数算出の精度向上に繋がる。
【0068】
なお、本実施形態においては、制御部80は、OCTデバイス5によって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいてオフセット距離Xを算出する構成としたが、これに限定されない。
【0069】
OCTデバイス5が毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイス(例えば、超音波Bプローブ、前眼部OCT)である場合、制御部80は、OCTデバイス5によって取得された前眼部断面像における毛様体の位置情報に基づいて、オフセット距離Xを求める。例えば、取得された前眼部断層像(前眼部断面像)より、毛様体(毛様体先端部)を検出し、検出した毛様体位置からチン小帯位置を予測する。そして、予測したチン小帯位置からチン小帯と水晶体との接点部分の位置を検出すればよい。
【0070】
また、OCTデバイス5がチン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイス(例えば、超音波Bプローブ、前眼部OCT)である場合、制御部80は、OCTデバイス5によって取得された前眼部断面像における接点部分を処理してオフセット距離Xを求める。例えば、前眼部断層像(断面像)にチン小帯が撮影されていた場合には、取得された前眼部断層像より、チン小帯と水晶体との接点部分の位置を検出すればよい。
【0071】
なお、本発明においては、本実施形態に記載した装置に限定されない。例えば、上記実施形態の機能を行うIOL度数計算ソフトウェア(プログラム)をネットワークや各種記憶媒体を介して、システムあるいは装置に供給する。そして、システムあるいは装置のコンピュータ(例えば、CPU等)がプログラムを読み出し、実行することも可能である。
【図面の簡単な説明】
【0072】
【図1】本実施形態に係る眼内レンズ度数決定装置の構成について説明する概略構成図である。
【図2】撮像された前眼部像が表示された前眼部観察画面を示す図である。
【図3】IOL度数の算出について説明するための図である。
【図4】オフセット量Xの算出方法を説明する図である。
【図5】補正量αについて説明する図である。
【符号の説明】
【0073】
5 光コヒーレンストモグラフィーデバイス
10 眼軸長測定デバイス
30 前眼部正面撮像光学系
40 アライメント投影光学系
50 ケラト投影光学系
70 モニタ
80 制御部
85 メモリ
84 操作部
【技術分野】
【0001】
本発明は、白内障手術によって眼内に挿入される眼内レンズの度数を決定する眼内レンズ度数決定するための装置及びプログラムに関する。
【背景技術】
【0002】
白内障手術において、水晶体核の除去後に被検眼の眼内に挿入される眼内レンズ(以下、IOL)のパワー(以下、度数)を決定(算出)するために、被検眼を測定して角膜屈折力と眼軸長等の被検者特有の眼特性データを得る。これを基礎とし、経験もしくは論理によって作成されたIOL計算式に従って、IOLの度数を算出する。IOL計算式は、SRK式、SRK/T式、等が周知である(特許文献1参照)。
【0003】
各IOL計算式では、予め定められたレンズ定数(例えば、A定数)が使用される。レンズ定数は、IOLメーカーによってIOLのモデル(型番)毎に設計的に定められている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2007−505716号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、IOL計算式のうち予測前房深度を求める部分は臨床データに基づいており、算出されるIOL度数は、標準的な眼球形状から外れる眼に対して、精度が悪くなることがある。
【0006】
SRK/T式を例にとると、予測術後前房深度の値は、多くの臨床データに基づいて導出された計算式によって算出される。また、SRK/T式では、予想術後前房深度を算出する際、A定数、角膜曲率半径、眼軸長を用いて算出を行うが、眼球形状から理論的に求める項と、臨床データに基づいて経験的に求める項の足し合わせによって算出される。しかしながら、上記のような従来の手法では、予想術後前房深度に関して誤差が大きくなる場合があり、IOL度数に誤差が生じる要因となっている。
【0007】
本発明は、上記問題点を鑑み、精度の高いIOL度数の決定をすることができる装置及びプログラムを提供することを技術課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は以下のような構成を備えることを特徴とする。
【0009】
(1) 被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、前記前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、該予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、を備えることを特徴とする。
(2) 前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいて前記オフセット距離を算出することを特徴とする(1)の眼内レンズ度数決定装置。
(3) 前記度数計算ユニットは、被検眼水晶体の形態情報として水晶体前面情報、水晶体後面情報、水晶体厚情報の少なくともいずれかを含む形態情報を得て、取得された該形態情報に基づいて前記オフセット距離を算出することを(2)の眼内レンズ度数決定装置。
(4) 前記前眼部撮像デバイスは、チン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における前記接点部分を処理して前記オフセット距離を求める(1)の眼内レンズ度数決定装置。
(5) 前記前眼部撮像デバイスは、毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における毛様体の位置情報に基づいて、前記オフセット距離を求める(1)の眼内レンズ度数決定装置。
(6) 前記前眼部撮像デバイスは、前眼部の3次元断面像を取得する前眼部撮像デバイスであって、前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までの前記オフセット距離を3次元的に求める(1)〜(5)のいずれかの眼内レンズ度数決定装置。
(7) 前記度数計算ユニットは、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する(1)〜(6)のいずれかの眼内レンズ度数決定装置。
(8) 前記前眼部撮像デバイスは、光コヒーレンストモグラフィーデバイス又はシャインプルークカメラ又は超音波プローブのいずれかである(1)〜(7)のいずれかの眼内レンズ度数決定装置。
(9) 前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求める第1ステップと、眼の前房深度に、第1ステップで求められた前記オフセット距離を加えることにより予測術後前房深度を算出する第2ステップと、第2ステップで算出された前記予測術後前房深度を用いて眼内レンズの度数計算を行う第3ステップと、をコンピュータに実行させる。
【発明の効果】
【0010】
本発明によれば、精度の高いIOL度数の決定をすることができる。
【発明を実施するための形態】
【0011】
以下、本発明に係る実施形態を図面に基づいて説明する。図1は本実施形態に係る眼内レンズ度数決定システム200の光学系について示す概略構成図である。なお、以下の光学系は、図示無き筐体に内蔵されている。また、その筐体は、周知のアライメント移動機構の駆動により、操作部材(例えば、ジョイスティック)を介して被検眼Eに対して3次元的に移動される。なお、以下の説明においては、なお、本実施形態においては、被検者眼(眼E)の軸方向をZ方向、水平方向をX方向、鉛直方向をY方向として説明する。眼底の表面方向をXY方向として考えても良い。
【0012】
以下の説明においては、光コヒーレンストモグラフィーデバイス(OCTデバイス)5と、眼軸長測定デバイス10と、角膜形状測定デバイス300と、を備えた眼内レンズ度数決定システム200を例に挙げて説明する。
【0013】
OCTデバイス5は、被検眼Eの断面像を撮影するための前眼部撮像デバイスとして用いられる。眼軸長測定デバイス10は、眼Eの眼軸長測定を測定するために用いられる。角膜形状測定デバイス300は、角膜形状を測定するために用いられる。なお、OCTデバイス5は、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスを例にとって説明する。
【0014】
OCTデバイス5は、干渉光学系(OCT光学系)100を備えている。OCT光学系100は、眼Eに測定光を照射する。OCT光学系100は、前眼部上(例えば、水晶体)から反射された測定光と,参照光との干渉状態を受光素子(検出器120)によって検出する。OCT光学系100は、前眼部上の撮像位置を変更するため、前眼部上における測定光の照射位置を変更する照射位置変更ユニット(例えば、光スキャナ108)を備える。制御部80は、設定された撮像位置情報に基づいて照射位置変更ユニットの動作を制御し、検出器120からの受光信号に基づいて断層画像を取得する。
【0015】
OCT光学系100は、いわゆる眼科用光断層干渉計(OCT:Optical coherence tomography)の装置構成を持つ。OCT光学系100は、測定光源102から出射された光をカップラー(光分割器)104によって測定光(試料光)と参照光に分割する。そして、OCT光学系100は、測定光学系106によって測定光を前眼部に導き,また、参照光を参照光学系110に導く。その後、前眼部によって反射された測定光と,参照光との合成による干渉光を検出器(受光素子)120に受光させる。
【0016】
光源102から出射された光は、カップラー104によって測定光束と参照光束に分割される。そして、測定光束は、光ファイバーを通過した後、空気中へ出射される。その光束は、光スキャナ108、及び測定光学系106の他の光学部材を介して前眼部に集光される。そして、前眼部で反射された光は、同様の光路を経て光ファイバーに戻される。
【0017】
光スキャナ108は、眼E上でXY方向(横断方向)に測定光を走査させる。光スキャナ108は、例えば、2つのガルバノミラーであり、その反射角度が駆動機構109によって任意に調整される。
【0018】
これにより、光源102から出射された光束はその反射(進行)方向が変化され、眼E上で任意の方向に走査される。これにより、前眼部上における撮像位置が変更される。光スキャナ108としては、光を偏向させる構成であればよい。例えば、反射ミラー(ガルバノミラー、ポリゴンミラー、レゾナントスキャナ)の他、光の進行(偏向)方向を変化させる音響光学素子(AOM)等が用いられる。
【0019】
参照光学系110は、眼Eでの測定光の反射によって取得される反射光と合成される参照光を生成する。参照光学系110は、マイケルソンタイプであってもよいし、マッハツェンダタイプであっても良い。参照光学系110は、例えば、反射光学系(例えば、参照ミラー)によって形成され、カップラー104からの光を反射光学系により反射することにより再度カップラー104に戻し、検出器120に導く。他の例としては、参照光学系110は、透過光学系(例えば、光ファイバー)によって形成され、カップラー104からの光を戻さず透過させることにより検出器120へと導く。
【0020】
参照光学系110は、参照光路中の光学部材を移動させることにより、測定光と参照光との光路長差を変更する構成を有する。例えば、参照ミラーが光軸方向に移動される。光路長差を変更するための構成は、測定光学系106の測定光路中に配置されてもよい。
【0021】
検出器120は、測定光と参照光との干渉状態を検出する。フーリエドメインOCTの場合では、干渉光のスペクトル強度が検出器120によって検出され、スペクトル強度データに対するフーリエ変換によって所定範囲における深さプロファイル(Aスキャン信号)が取得される。ここで、制御部80は、光スキャナ108により測定光を前眼部上で所定の横断方向に走査することにより断層像を取得できる。すなわち、被検眼の前眼部断層像を撮像する。例えば、X方向もしくはY方向に走査することにより、被検眼前眼部のXZ面もしくはYZ面における断層像(前眼部断層像)を取得できる(なお、本実施形態においては、このように測定光を前眼部に対して一次元走査し、断層像を得る方式をBスキャンとする)。なお、取得された前眼部断層像は、制御部80に接続されたメモリ85に記憶される。さらに、測定光をXY方向に二次元的に走査することにより、被検眼前眼部の三次元画像を取得することも可能である。
【0022】
例えば、フーリエドメインOCTとしては、Spectral-domain OCT(SD−OCT)、Swept-source OCT(SS−OCT)が挙げられる。また、Time-domain OCT(TD−OCT)であってもよい。
【0023】
SD−OCTの場合、光源102として低コヒーレント光源(広帯域光源)が用いられ、検出器120には、干渉光を各周波数成分(各波長成分)に分光する分光光学系(スペクトルメータ)が設けられる。スペクトルメータは、例えば、回折格子とラインセンサからなる。
【0024】
SS−OCTの場合、光源102として出射波長を時間的に高速で変化させる波長走査型光源(波長可変光源)が用いられ、検出器120として、例えば、単一の受光素子が設けられる。光源102は、例えば、光源、ファイバーリング共振器、及び波長選択フィルタによって構成される。そして、波長選択フィルタとして、例えば、回折格子とポリゴンミラーの組み合わせ、ファブリー・ペローエタロンを用いたものが挙げられる。
【0025】
角膜形状測定デバイス300は、ケラト投影光学系50、アライメント投影光学系40、前眼部正面撮像光学系30、に大別される。
【0026】
ケラト投影光学系50は、測定光軸L1を中心に配置されたリング状の光源51を有し、被検眼角膜にリング指標を投影して角膜形状(曲率、乱視軸角度、等)を測定するために用いられる。なお、光源51には、例えば、赤外光または可視光を発するLEDが使用される。なお、投影光学系50について、光軸L1を中心とする同一円周上に少なくとも3つ以上の点光源が配置されていればよく、間欠的なリング光源であってもよい。さらに、複数のリング指標を投影するプラチド指標投影光学系であってもよい。
【0027】
アライメント投影光学系40は、光源51の内側に配置され、赤外光を発する投影光源41(例えば、λ=970nm)を有し、被検眼角膜Ecにアライメント指標を投影するために用いられる。そして、角膜Ecに投影されたアライメント指標は、被検眼に対する位置合わせ(例えば、自動アライメント、アライメント検出、手動アライメント、等)に用いられる。本実施形態において、投影光学系50は、被検者眼角膜Ecに対してリング指標を投影する光学系であって、リング指標は、マイヤーリングも兼用する。また、投影光学系40の光源41は、前眼部を斜め方向から赤外光にて照明する前眼部照明を兼用する。なお、投影光学系40において、さらに、角膜Ecに平行光を投影する光学系を設け、投影光学系40による有限光との組合せにより前後のアライメントを行うようにしてもよい。
【0028】
前眼部正面撮像光学系30は、前眼部正面像を撮像(取得)するために用いられる。前眼部正面撮像光学系30は、ダイクロイックミラー33、対物レンズ47、ダイクロイックミラー62、フィルタ34、撮像レンズ37、二次元撮像素子35、を含み、被検眼の前眼部正面像を撮像するために用いられる。二次元撮像素子35は、被検眼前眼部と略共役な位置に配置されている。
【0029】
前述の投影光学系40、投影光学系50による前眼部反射光は、ダイクロイックミラー33、対物レンズ47、ダイクロイックミラー62、フィルタ34、及び撮像レンズ37を介して二次元撮像素子35に結像される。
【0030】
眼軸長測定デバイス10は、投光光学系と受光光学系が備えられており、投光光学系には、低コヒーレント光を出射する測定光源1が備えられている。そして、光源1から出射された光を測定光と参照光に分割し、少なくとも測定光を被検眼に照射すると共に、被検眼からの反射光と参照光を合成させ、受光素子に入射させる。そして、受光素子から出力される受光信号に基づいて、受光素子によって干渉光が検出されたタイミングを元に、眼軸長が算出される。なお、本実施例では、眼軸長測定光学系10の測定光源は、固視灯を兼ねている。
【0031】
また、例えば、光源1から発せられた光の眼底での反射により取得される眼底反射光の大部分は、ダイクロイックミラー33を透過し、眼軸長測定光学系10の受光素子によって受光される。また、眼底反射光の一部は、ダイクロイックミラー33で反射され、前眼部正面撮像光学系30で結像される。
【0032】
次に、制御系について説明する。制御部80は、装置全体の制御及び測定結果の算出を行う。制御部80は、OCTデバイス5の各部材、眼軸長測定デバイス10の各部材、角膜形状測定デバイス300の各部材、モニタ70、操作部84、メモリ85、等と接続されている。
【0033】
また、本実施形態では、眼軸長測定する眼軸長測定モードと前眼部断面像より前眼部(例えば、角膜形状等)を測定する前眼部測定モードとが用意されている。各モードは、自動又は手動にて切り換えが行われる。
【0034】
また、操作部84には、操作入力部として、マウス等の汎用インターフェースが用いられてもよいし、その他、タッチパネルが用いられてもよい。そして、操作部84には、例えば、眼軸長測定する眼軸長測定モードと前眼部断面像より前眼部(例えば、角膜形状等)を測定する前眼部測定モードを切り換えるためのモード切換スイッチ84aが設けられている。
【0035】
なお、メモリ85には、各種制御プログラムの他、制御部80が眼軸長/角膜形状等を算出するためのソフトウェアプログラム、制御部80がIOL度数を算出するためのソフトウェアプログラム等が記憶されている。
【0036】
<前眼部測定モード>
以上のような構成を備える装置において、その動作について説明する。なお、以下の説明においては、前眼部測定モードについて説明する。検者は、モニタ70に表示される被検眼のアライメント状態を見ながら、図示なきジョイスティック等の操作手段を用いて、装置を上下左右及び前後方向に移動させ、装置を被検眼Eに対して所定の位置関係に置く。この場合、検者は、固視標を被検眼に固視させる。
【0037】
図2は撮像素子35によって撮像された前眼部像が表示された前眼部観察画面を示す図である。アライメントの際には、光源41及び光源51が点灯される。また、OCTデバイス5の光源102が点灯される。ここで、検者は、図2に示すように、電子的に表示されたレチクルLTと、光源41によるリング指標R1と、が同心円状になるように上下左右のアライメントを行う。また、検者は、リング指標R1のピントが合うように、前後のアライメントを行う。なお、リング指標R1の外側には、光源51によるリング指標R2が表示されている。
【0038】
前眼部に対するアライメントが完了されると、制御部80によって、予め設定された走査パターンに基づきOCT光学系100によって、断層像が取得され、取得された断層像がモニタ75上に動画表示される。
【0039】
初めに、角膜形状測定が行われる。なお、本実施形態においては、角膜形状測定デバイス300を用いて、角膜前面における角膜曲率半径が算出され、OCTデバイス5を用いて、角膜後面における角膜曲率半径が算出される。上記のようにしてアライメントが行われ、所定のトリガ信号が発せられると、制御部80は、前眼部像を撮影する。そして、制御部80は、メモリ85に記憶された前眼部画像におけるリング指標像R1及びR2に基づいて被検眼の角膜形状(例えば、強主経線方向及び弱主経線方向における角膜前面の角膜曲率半径、角膜の乱視軸角度、等)をそれぞれ算出し、測定結果をメモリ85に記憶する。
【0040】
次いで、前眼部断面像の撮影を行われる。制御部80は、前眼部断層像を取得し、取得された画像データ(例えば、静止画として)をメモリ85に記憶する。なお、OCT光学系100によって取得される前眼部断層像は、水晶体後面までの範囲の断層像を撮影することができる。このため、制御部80は、取得された前眼部断層像を処理(解析)して、前眼部(本実施形態においては、角膜後面の角膜曲率半径、前房深度、角膜厚、水晶体前面曲率、水晶体後面曲率、水晶体厚)を測定することができる。
【0041】
なお、本実施形態においては、角膜頂点位置と装置の光軸(L1)が一致する位置がアライメントの基準位置として設定され、アライメントが行われる。すなわち、前眼部断層像を取得する際の走査位置について、走査位置が角膜頂点位置を通るようにアライメントされる。
【0042】
<眼軸長測定>
次いで、眼軸長測定モードについて説明する。検者は、モニタ70に表示される被検眼のアライメント状態を見ながら、図示なきジョイスティック等の操作手段を用いて、装置を上下左右及び前後方向に移動させ、装置を被検眼Eに対して所定の位置関係に置く。
【0043】
アライメント完了後、測定開始のトリガ信号が自動又は手動にて出力され、制御部80によって測定光源1が点灯されると、眼軸長測定デバイス10によって測定光が被検眼に照射されると共に、測定光による被検眼からの反射光が眼軸長測定デバイス10の受光素子に入射される。そして、受光素子から出力される受光信号に基づいて、受光素子によって干渉光が検出されたタイミングを元に、眼軸長が算出される。
【0044】
<IOL度数算出>
上記に説明したように、眼軸長測定モードと前眼部測定モードにおける測定が終了すると、制御部80は、取得された測定データに基づいてIOL度数を算出する。
【0045】
IOL度数の算出方法としては、既知であるSRK/T式、Binkhors式等を一部流用する。例えば、SRK/T式を流用する場合、角膜曲率半径、眼軸長、レンズ定数(SRK/T式を用いる場合はA定数と呼ばれる)、のパラメータを用いてIOL度数計算が行われる。
【0046】
制御部80は、OCTデバイス5によって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度にオフセット距離を加えることにより予測術後前房深度を算出し、予測術後前房深度を用いて眼内レンズの度数計算を行う。
【0047】
図3を用いて具体的に説明すると、初めに、角膜厚CCTと前房深度ACDから角膜前面から水晶体前面までの角膜高さが算出され、その角膜高さに対し、オフセット量(オフセット距離)X、IOLの種類によって異なる補正量α(A定数の関数)とが足し合わせられることによって、予想術後前房深度ELPが算出される。そして、予想術後前房深度ELP、眼軸長測定結果AL、角膜曲率半径、を用いてIOL度数が算出される。
【0048】
オフセット量Xは、IOLが挿入された後の水晶体前面の位置からIOL支持部の位置(おおよそ、IOLの光学部の位置)までの距離を示している。なお、オフセット量Xは、IOLが水晶体嚢から圧力を受けることによって生じる水晶体後嚢側へのIOLの移動量(上記で示す補正量α)が考慮されておらず、除かれている(詳細は後述する)。IOL支持部の位置は、チン小帯と水晶体との接点部分(例えば、水晶体前面と水晶体後面との交差部分)の位置と同様となる。
【0049】
ここで、角膜厚CCTと前房深度ACDは測定結果であるため誤差は生じにくいが、オフセット量Xは、多くの臨床データに基づくパラメータであるA定数を主として、決定する場合には、誤差が生じやすい。
【0050】
以下に、オフセット量Xをより精度良く算出する方法について説明する。本実施形態において、制御部80は、被検眼水晶体の形態情報として、水晶体前面情報(水晶体前面曲率半径)R3、水晶体後面情報(水晶体後面曲率半径)R4、水晶体厚情報(水晶体厚)LT、の少なくともいずれかを含む形態情報を得て、取得された形態情報に基づいてオフセット距離を算出する。すなわち、オフセット量Xを精度良く算出するためには、被検眼に応じて水晶体のプロファイルを取得する必要がある。
【0051】
初めに、水晶体前面曲率半径R3、水晶体後面曲率半径R4、水晶体厚LTを用いて、チン小帯と水晶体との接点部分の位置を算出する。チン小帯と水晶体との接点部分の位置は、IOLを挿入した際のIOLの支持部が位置する部位となるため、チン小帯と水晶体との接点部分の位置を算出することによって、術後のIOL支持部の位置を算出できる。そして、術後のIOL支持部の位置は、おおよそIOLの位置と同様と扱われるため、術後のIOL支持部の位置を算出することによって、IOLの位置を算出できる。これによって、オフセット量Xが算出できる。
【0052】
具体的には、オフセット量Xは、以下のようにして求めることができる。図4は、オフセット量Xの算出方法を説明する図である。hは、光軸L1から水晶体のチン小帯と水晶体との接点部分までの距離を示している。X1は、光軸L1における水晶体前面曲率中心O4から水晶体後面までの距離を示している。X1'は、水晶体のチン小帯と水晶体との接点位置から水晶体後面までの距離を示している。X2は、光軸L1における水晶体後面曲率中心O3から水晶体前面までの距離を示している。Xは、水晶体のチン小帯と水晶体との接点位置から水晶体前面までの距離を示しており、オフセット量である。
【0053】
初めに、ピタゴラスの定理により以下の式が成り立つ。
【0054】
【数1】
そして、上記の式において、hが同様であるため、これらの式を展開すると以下の式が成り立つ。
【0055】
【数2】
すなわち、オフセット量Xが実際に測定された測定値を用いて算出されることになるため、より誤差の少ないオフセット量Xを算出することができる。
【0056】
次いで、算出したオフセット量Xより、予想術後前房深度ELPを算出する。予想術後前房深度ELPは、オフセット量X、前房深度ACD、角膜厚CCT、補正量α、に基づいて算出される。
【0057】
補正量αは、図5に示すように、IOL挿入後に水晶体の嚢の圧力によって、IOLが後嚢側に押し下げられた際に、IOLが移動した量を補正するためのパラメータである。IOLが後嚢側に押し下げられると、IOLは若干、後嚢側に移動する。すなわち、IOLの後嚢側への移動量を補正して、予想術後前房深度ELPを算出することによって、より精度良く予想術後前房深度ELPを算出できる。なお、補正量αは、IOLの構造、材料等によって移動量が異なるため、IOLの種類によって設定されているA定数を用いた周知の関数によって算出される。すなわち、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する。A定数は、予め設定され、メモリ85に記憶されている。
【0058】
予想術後前房深度ELPは、以下のようにして求めることができる。
【0059】
【数3】
以上のように、水晶体の形態情報のような実測値を新たに加えて、オフセット量Xが算出されることにより、精度の高い予想術後前房深度ELPが算出される。そして、予想術後前房深度ELPと眼軸長測定結果ALを用いて、IOL度数を精度良く算出することができる。
【0060】
また、本発明は、角膜前後面の角膜曲率、角膜厚をそれぞれ算出し、実測値にてIOL度数を算出しているため、角膜形状に変化や異常のある被検眼に対しても、精度良くIOL度数を算出することができる。例えば、レーシック術後眼のような角膜形状が変化している被検眼に対して、角膜形状(角膜曲率、角膜厚)の変化が考慮された状態でIOL度数の算出が行われているため、特に有用となる。
【0061】
なお、本発明は、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスにおいて、複数の走査位置にて前眼部断層像を取得することにより3次元形状画像を取得する場合においても適用可能である。OCTデバイス5は、前眼部の3次元断面像(3次元前眼部データ)を取得する前眼部撮像デバイスであって、制御部80は、前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を3次元的に求める。この場合、3次元前眼部データにおける各経線方向毎の角膜前面曲率と角膜後面曲率の平均を算出し、これに基づいてELPを算出する。そして、3次元形状画像より測定値を取得することによって、取得される測定値の精度が良くなる。
【0062】
なお、本実施形態においては、前眼部断面像を撮像する前眼部撮像デバイスとして、前眼部断層像(断面像)撮影用の光コヒーレンストモグラフィーデバイスを例に挙げたがこれに限定されない。光源からの出射光を被検眼前眼部に向けて投光し、前眼部上に光切断面を形成させる投光光学系と、光切断面の前眼部での散乱により取得される前眼部散乱光を含む光を受光する検出器を有する受光光学系と、を有し、検出器からの検出信号に基づいて前眼部断面画像を形成する構成であればよい。すなわち、検眼の前眼部にスリット光を投影し、シャインプルークカメラにより前眼部断面画像を得る装置等にも適用可能である。
【0063】
さらに、シャインプルークカメラを回転させることにより前眼部の3次元形状画像を取得する装置にも適用可能である。この場合、所定の回転角度毎にずれ補正を行うことによって、精度よく前眼部の3次元形状画像を取得することが可能となり、3次元形状画像より取得される測定値の精度が良くなる。この場合、撮像面(スリット断面)に対して垂直な方向の位置ずれが検出され、その検出結果に基づいてずれ補正処理が行われる。
【0064】
また、上記構成においては、光学的に前眼部断面像を取得したが、これに限定されない。被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスであればよい。例えば、Bスキャン用の超音波プローブを用いて前眼部からの反射情報を検出することによって前眼部断面像を取得する構成であればよい。
【0065】
なお、本実施形態においては、IOL度数の算出方法として、既知であるSRK/T式、Binkhors式等のIOL計算式を用いたがこれに限定されない。例えば、光線を用いて、光の反射や屈折の様子を幾何学的に追いかけて、光の振る舞いをシミュレーションする光線追跡法によって、IOL度数を算出することもできる。この場合、予想術後前房深度ELP、角膜厚CCT、眼軸長測定結果AL、角膜前面の角膜曲率半径、角膜後面の角膜曲率半径、を用いて光線追跡法によって、IOL度数を算出する。光線追跡法は、光の反射や屈折をシミュレーションによってIOL度数を算出したものであるため、理論式であるIOL計算式によりも精度良くIOL度数を算出することができる。
【0066】
なお、本実施形態においては、角膜形状測定デバイス300を用いて、角膜前面における角膜曲率半径が算出され、OCTデバイス5を用いて、角膜後面における角膜曲率半径が算出される構成としたがこれに限定されない。OCTデバイス5によって、角膜前後面における角膜曲率半径を算出してもよい。また、角膜前後面の角膜曲率半径を同様の測定値で扱ってもよい。すなわち、角膜形状測定デバイス300で算出した角膜前面における角膜曲率半径が角膜前後面における角膜曲率半径として用いられる。
【0067】
なお、本実施形態において、角膜形状測定デバイス300として、角膜トポグラフィーを用いることもできる。この場合、角膜前面の曲率半径を算出する際に、角膜の全体の形状から角膜前面の曲率半径が算出されるため、角膜前面の曲率半径が精度良く算出される。このため、IOL度数を算出する際に、IOL度数算出の精度向上に繋がる。
【0068】
なお、本実施形態においては、制御部80は、OCTデバイス5によって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいてオフセット距離Xを算出する構成としたが、これに限定されない。
【0069】
OCTデバイス5が毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイス(例えば、超音波Bプローブ、前眼部OCT)である場合、制御部80は、OCTデバイス5によって取得された前眼部断面像における毛様体の位置情報に基づいて、オフセット距離Xを求める。例えば、取得された前眼部断層像(前眼部断面像)より、毛様体(毛様体先端部)を検出し、検出した毛様体位置からチン小帯位置を予測する。そして、予測したチン小帯位置からチン小帯と水晶体との接点部分の位置を検出すればよい。
【0070】
また、OCTデバイス5がチン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイス(例えば、超音波Bプローブ、前眼部OCT)である場合、制御部80は、OCTデバイス5によって取得された前眼部断面像における接点部分を処理してオフセット距離Xを求める。例えば、前眼部断層像(断面像)にチン小帯が撮影されていた場合には、取得された前眼部断層像より、チン小帯と水晶体との接点部分の位置を検出すればよい。
【0071】
なお、本発明においては、本実施形態に記載した装置に限定されない。例えば、上記実施形態の機能を行うIOL度数計算ソフトウェア(プログラム)をネットワークや各種記憶媒体を介して、システムあるいは装置に供給する。そして、システムあるいは装置のコンピュータ(例えば、CPU等)がプログラムを読み出し、実行することも可能である。
【図面の簡単な説明】
【0072】
【図1】本実施形態に係る眼内レンズ度数決定装置の構成について説明する概略構成図である。
【図2】撮像された前眼部像が表示された前眼部観察画面を示す図である。
【図3】IOL度数の算出について説明するための図である。
【図4】オフセット量Xの算出方法を説明する図である。
【図5】補正量αについて説明する図である。
【符号の説明】
【0073】
5 光コヒーレンストモグラフィーデバイス
10 眼軸長測定デバイス
30 前眼部正面撮像光学系
40 アライメント投影光学系
50 ケラト投影光学系
70 モニタ
80 制御部
85 メモリ
84 操作部
【特許請求の範囲】
【請求項1】
被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、
前記前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、該予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、
を備えることを特徴とする眼内レンズ度数決定装置。
【請求項2】
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいて前記オフセット距離を算出することを特徴とする請求項1の眼内レンズ度数決定装置。
【請求項3】
前記度数計算ユニットは、被検眼水晶体の形態情報として水晶体前面情報、水晶体後面情報、水晶体厚情報の少なくともいずれかを含む形態情報を得て、取得された該形態情報に基づいて前記オフセット距離を算出することを請求項2の眼内レンズ度数決定装置。
【請求項4】
前記前眼部撮像デバイスは、チン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における前記接点部分を処理して前記オフセット距離を求める請求項1の眼内レンズ度数決定装置。
【請求項5】
前記前眼部撮像デバイスは、毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における毛様体の位置情報に基づいて、前記オフセット距離を求める請求項1の眼内レンズ度数決定装置。
【請求項6】
前記前眼部撮像デバイスは、前眼部の3次元断面像を取得する前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までの前記オフセット距離を3次元的に求める請求項1〜5のいずれかの眼内レンズ度数決定装置。
【請求項7】
前記度数計算ユニットは、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する請求項1〜6のいずれかの眼内レンズ度数決定装置。
【請求項8】
前記前眼部撮像デバイスは、光コヒーレンストモグラフィーデバイス又はシャインプルークカメラ又は超音波プローブのいずれかである請求項1〜7のいずれかの眼内レンズ度数決定装置。
【請求項9】
前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求める第1ステップと、
眼の前房深度に、第1ステップで求められた前記オフセット距離を加えることにより予測術後前房深度を算出する第2ステップと、
第2ステップで算出された前記予測術後前房深度を用いて眼内レンズの度数計算を行う第3ステップと、
をコンピュータに実行させる眼内レンズ度数決定プログラム。
【請求項1】
被検眼前眼部からの反射を検出して前眼部断面画像を得る前眼部撮像デバイスと、
前記前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求め、眼の前房深度に前記オフセット距離を加えることにより予測術後前房深度を算出し、該予測術後前房深度を用いて眼内レンズの度数計算を行う度数計算ユニットと、
を備えることを特徴とする眼内レンズ度数決定装置。
【請求項2】
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面画像を処理して被検眼水晶体の形態情報を得て、得られた形態情報に基づいて前記オフセット距離を算出することを特徴とする請求項1の眼内レンズ度数決定装置。
【請求項3】
前記度数計算ユニットは、被検眼水晶体の形態情報として水晶体前面情報、水晶体後面情報、水晶体厚情報の少なくともいずれかを含む形態情報を得て、取得された該形態情報に基づいて前記オフセット距離を算出することを請求項2の眼内レンズ度数決定装置。
【請求項4】
前記前眼部撮像デバイスは、チン小帯と水晶体の接点部分を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における前記接点部分を処理して前記オフセット距離を求める請求項1の眼内レンズ度数決定装置。
【請求項5】
前記前眼部撮像デバイスは、毛様体を含む前眼部断面像の画像化が可能な前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された前眼部断面像における毛様体の位置情報に基づいて、前記オフセット距離を求める請求項1の眼内レンズ度数決定装置。
【請求項6】
前記前眼部撮像デバイスは、前眼部の3次元断面像を取得する前眼部撮像デバイスであって、
前記度数計算ユニットは、前記前眼部撮像デバイスによって取得された3次元断面像に基づいて水晶体前面からチン小帯と水晶体の接点までの前記オフセット距離を3次元的に求める請求項1〜5のいずれかの眼内レンズ度数決定装置。
【請求項7】
前記度数計算ユニットは、前記予測術後前房深度を、各眼内レンズ固有のA定数によって補正する請求項1〜6のいずれかの眼内レンズ度数決定装置。
【請求項8】
前記前眼部撮像デバイスは、光コヒーレンストモグラフィーデバイス又はシャインプルークカメラ又は超音波プローブのいずれかである請求項1〜7のいずれかの眼内レンズ度数決定装置。
【請求項9】
前眼部撮像デバイスによって取得された前眼部断面画像に基づいて水晶体前面からチン小帯と水晶体の接点までのオフセット距離を求める第1ステップと、
眼の前房深度に、第1ステップで求められた前記オフセット距離を加えることにより予測術後前房深度を算出する第2ステップと、
第2ステップで算出された前記予測術後前房深度を用いて眼内レンズの度数計算を行う第3ステップと、
をコンピュータに実行させる眼内レンズ度数決定プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−94410(P2013−94410A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239736(P2011−239736)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000135184)株式会社ニデック (745)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000135184)株式会社ニデック (745)
【Fターム(参考)】
[ Back to top ]