
眼底解析装置及びプログラム
【課題】 本発明によれば、診断に有用な情報を提供する。
【解決手段】 光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、光コヒーレンストモグラフィーデバイスによって取得された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、を備えることを特徴とする。
【解決手段】 光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、光コヒーレンストモグラフィーデバイスによって取得された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
被検眼眼底の断層像を解析する眼底解析装置及びプログラムに関する。
【背景技術】
【0002】
従来、光干渉技術を用いて眼底の断層画像を取得し、得られた眼底の断層画像(網膜断層画像)から被検眼の状態を評価するための眼底解析装置が知られている(特許文献1参照)。
【0003】
このような眼底解析装置では、赤外光により得られる眼底正面画像がモニタに表示され、眼底画像のある領域(部位)が選択される。そして、選択した領域の眼底断層画像が光干渉技術を用いて取得され、パーソナル・コンピュータの記憶部(例えば、ハードディスク)などに一旦保存される。その後、取得された眼底断層画像は、パーソナル・コンピュータ(PC)等によって解析され、PCのモニタ上に解析結果が表示される。検者はこのようにして得られた眼底断層画像の解析結果を見て被検眼の異常の有無等を判断している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−29467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来は、断層像を取得し、その後、断層像を解析する場合、各層の厚み(層厚)等を計測し、疾患部等の診断情報として利用されていた。
【0006】
ところで、視細胞から信号伝達系のすべてが存在しないと、視力が確保できない可能性がある。なぜなら、視機能に関連する網膜層(例えば、IS/OS、COST、ELM)で検出された信号は、信号伝達系に関連する網膜層(例えば、NFL、GCL、IPL)を介して脳に伝達される。ともすれば、これらにいずれかに異常があることで、人眼の視力に影響を及ぼす可能性がある。
【0007】
これらの事情を考慮した場合、層厚の計測結果等の情報だけでは、眼底の診断において十分とはいえないと考える。
【0008】
上記従来技術の問題点に鑑み、診断に有用な情報を提供できる眼底撮影装置を提供することを技術課題とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明は以下のような構成を備えることを特徴とする。
【0010】
(1) 光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、前記光コヒーレンストモグラフィーデバイスによって取得された前記断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、を備えることを特徴とする。
(2) 前記解析手段は、判定結果に基づいて、網膜層の残存領域と欠損領域の分布状態を示す解析マップを作成する(1)の眼底解析装置。
(3) 前記解析手段は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する(1)〜(2)のいずれかの眼底解析装置。
(4) 前記解析手段は、前記断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する(1)〜(3)のいずれかの眼底解析装置。
(5) 前記解析手段は、前記判定結果に基づく解析パラメータを作成する(1)〜(4)のいずれかの眼底解析装置。
(6) 前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づくパラメータである(1)〜(5)のいずれかの眼底解析装置。
(7) 前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域の寸法情報、面積情報、体積情報の少なくともいずれか、又は所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づくパラメータである(1)〜(6)のいずれかの眼底解析装置。
(8) 前記解析手段による解析情報を出力する出力手段を備える(1)〜(7)のいずれかの眼底解析装置。
(9) 視機能に関連する網膜層は、ELM、IS/OS、COST、RPEのいずれかである(1)〜(8)のいずれかの眼底解析装置。
(10) 前記解析手段は、前記連続性の判定結果に基づく解析マップを作成し、該解析マップは、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップである(4)の眼底解析装置。
(11) 前記解析手段は、前記連続性の判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づくパラメータである(4)の眼底解析装置。
(12) 前記解析手段は、前記断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、前記視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成する(1)〜(11)のいずれかの眼底解析装置。
(13) 前記解析手段は、視機能に関連する網膜層の有無を二次元的に判定する(1)〜(12)のいずれかの眼底解析装置。
(14) 記憶手段に記憶された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析工程と、前記解析工程による解析情報をモニタに出力する出力工程と、をコンピュータに実行させる眼底解析プログラム。
【発明の効果】
【0011】
本発明によれば、診断に有用な情報を提供できる。
【発明を実施するための形態】
【0012】
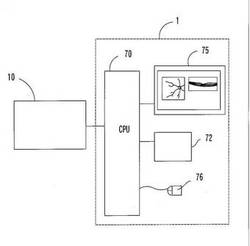
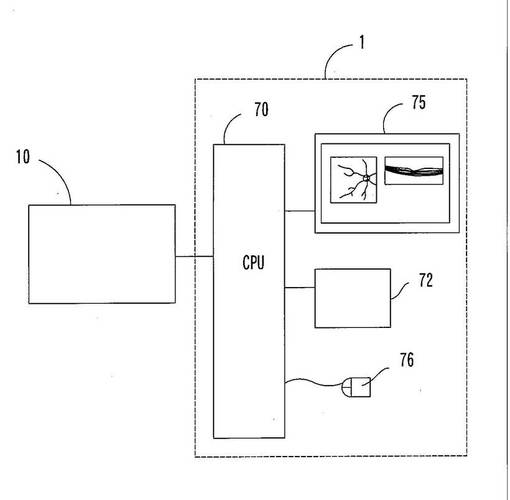
以下、本発明の実施形態を図面に基づいて説明する。図1は本実施形態に係る眼底解析装置の構成について説明するブロック図である。
【0013】
眼底撮影装置10によって撮影された眼底画像をモニタ上で観察するための眼底解析装置1は、CPU(演算制御部)70と、マウス(操作部)76と、メモリ(記憶部)72と、モニタ75と、から構成され、各部はバス等を介してCPU70と電気的に接続されている。
【0014】
制御部70は、メモリ72に記憶されている眼科解析プログラム及び各種制御プログラムに基づいて各部の動作を制御する。この眼科解析プログラムをコンピュータ上で実行させることによって眼底解析装置1を使用することが可能となる。なお、制御部70、操作部76、メモリ72、モニタ75として、市販のPC(パーソナルコンピュータ)が持つ演算処理部、入力部、記憶部、表示部を用い、市販のPCに眼科解析プログラムをインストールするようにしてもよい。
【0015】
なお、眼底解析装置1には、被検眼の所定部位における画像を撮影するための眼底撮影装置10が接続されている。本実施形態においては、眼底撮影装置10として、被検者眼Eの眼底Efの断層像を撮影するための光コヒーレンストモグラフィーデバイス(OCTデバイス)を例に挙げて説明する。なお、本実施形態においては、眼底解析装置1に眼底撮影装置10が接続されている構成を例としているがこれに限定されない。眼底解析装置1に眼底撮影装置10が一体となった装置であってもよい。
【0016】
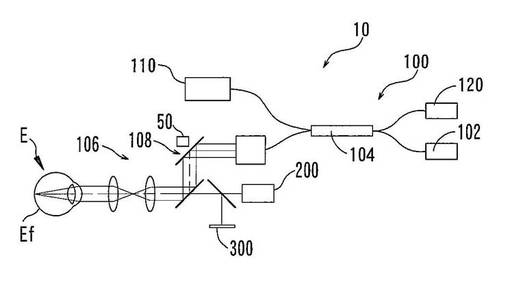
図2は本実施形態に係る眼底撮影装置の構成について説明する概略構成図である。なお、本実施形態においては、被検者眼(眼E)の軸方向をZ方向、水平方向をX方向、鉛直方向をY方向として説明する。眼底の表面方向をXY方向として考えても良い。
【0017】
以下、図1と図2を用いて装置構成の概略を説明する。本眼底撮影装置は、被検者眼Eの眼底Efの断層像を撮影するための光コヒーレンストモグラフィーデバイス(OCTデバイス)10である。OCTデバイス10は、干渉光学系(OCT光学系)100と、正面観察光学系200と、固視標投影ユニット300と、を含む。そして、OCTデバイス10は、制御部70と接続されている。すなわち、眼底解析装置1とOCTデバイス10が接続されている。
【0018】
OCT光学系100は、眼底に測定光を照射する。OCT光学系100は、眼底から反射された測定光と,参照光との干渉状態を受光素子(検出器120)によって検出する。OCT光学系100は、眼底Ef上の撮像位置を変更するため、眼底Ef上における測定光の照射位置を変更する照射位置変更ユニット(例えば、光スキャナ108、固視標投影ユニット300)を備える。制御部70は、設定された撮像位置情報に基づいて照射位置変更ユニットの動作を制御し、検出器120からの受光信号に基づいて断層像を取得する。
【0019】
<OCT光学系>
OCT光学系100は、いわゆる眼科用光断層干渉計(OCT:Optical coherence tomography)の装置構成を持ち、眼Eの断層像を撮像する。OCT光学系100は、測定光源102から出射された光をカップラー(光分割器)104によって測定光(試料光)と参照光に分割する。そして、OCT光学系100は、測定光学系106によって測定光を眼Eの眼底Efに導き,また、参照光を参照光学系110に導く。その後、眼底Efによって反射された測定光と,参照光との合成による干渉光を検出器(受光素子)120に受光させる。
【0020】
検出器120は、測定光と参照光との干渉状態を検出する。フーリエドメインOCTの場合では、干渉光のスペクトル強度が検出器120によって検出され、スペクトル強度データに対するフーリエ変換によって所定範囲における深さプロファイル(Aスキャン信号)が取得される。例えば、Spectral-domain OCT(SD−OCT)、Swept-source OCT(SS−OCT)が挙げられる。また、Time-domain OCT(TD−OCT)であってもよい。
【0021】
SD−OCTの場合、光源102として低コヒーレント光源(広帯域光源)が用いられ、検出器120には、干渉光を各周波数成分(各波長成分)に分光する分光光学系(スペクトルメータ)が設けられる。スペクトルメータは、例えば、回折格子とラインセンサからなる。
【0022】
SS−OCTの場合、光源102として出射波長を時間的に高速で変化させる波長走査型光源(波長可変光源)が用いられ、検出器120として、例えば、単一の受光素子が設けられる。光源102は、例えば、光源、ファイバーリング共振器、及び波長選択フィルタによって構成される。そして、波長選択フィルタとして、例えば、回折格子とポリゴンミラーの組み合わせ、ファブリー・ペローエタロンを用いたものが挙げられる。
【0023】
光源102から出射された光は、カップラー104によって測定光束と参照光束に分割される。そして、測定光束は、光ファイバーを通過した後、空気中へ出射される。その光束は、光スキャナ108、及び測定光学系106の他の光学部材を介して眼底Efに集光される。そして、眼底Efで反射された光は、同様の光路を経て光ファイバーに戻される。
【0024】
光スキャナ108は、眼底上で二次元的に(XY方向(横断方向))に測定光を走査させる。光スキャナ108は、瞳孔と略共役な位置に配置される。光スキャナ108は、例えば、2つのガルバノミラーであり、その反射角度が駆動機構50によって任意に調整される。
【0025】
これにより、光源102から出射された光束はその反射(進行)方向が変化され、眼底上で任意の方向に走査される。これにより、眼底Ef上における撮像位置が変更される。光スキャナ108としては、光を偏向させる構成であればよい。例えば、反射ミラー(ガルバノミラー、ポリゴンミラー、レゾナントスキャナ)の他、光の進行(偏向)方向を変化させる音響光学素子(AOM)等が用いられる。
【0026】
参照光学系110は、眼底Efでの測定光の反射によって取得される反射光と合成される参照光を生成する。参照光学系110は、マイケルソンタイプであってもよいし、マッハツェンダタイプであっても良い。参照光学系110は、例えば、反射光学系(例えば、参照ミラー)によって形成され、カップラー104からの光を反射光学系により反射することにより再度カップラー104に戻し、検出器120に導く。他の例としては、参照光学系110は、透過光学系(例えば、光ファイバー)によって形成され、カップラー104からの光を戻さず透過させることにより検出器120へと導く。
【0027】
参照光学系110は、参照光路中の光学部材を移動させることにより、測定光と参照光との光路長差を変更する構成を有する。例えば、参照ミラーが光軸方向に移動される。光路長差を変更するための構成は、測定光学系106の測定光路中に配置されてもよい。
【0028】
<正面観察光学系>
正面観察光学系200は、眼底Efの正面画像を得るために設けられている。観察光学系200は、例えば、光源から発せられた測定光(例えば、赤外光)を眼底上で二次元的に走査させる光スキャナと、眼底と略共役位置に配置された共焦点開口を介して眼底反射光を受光する第2の受光素子と、を備え、いわゆる眼科用走査型レーザ検眼鏡(SLO)の装置構成を持つ。
【0029】
なお、観察光学系200の構成としては、いわゆる眼底カメラタイプの構成であってもよい。また、OCT光学系100は、観察光学系200を兼用してもよい。すなわち、正面画像は、二次元的に得られた断層像を形成するデータを用いて取得されるようにしてもよい(例えば、三次元断層像の深さ方向への積算画像、XY各位置でのスペクトルデータの積算値、ある一定の深さ方向におけるXY各位置での輝度データ、網膜表層画像、等)。
【0030】
<固視標投影ユニット>
固視標投影ユニット300は、眼Eの視線方向を誘導するための光学系を有する。投影ユニット300は、眼Eに呈示する固視標を有し、複数の方向に眼Eを誘導できる。
【0031】
例えば、固視標投影ユニット300は、可視光を発する可視光源を有し、視標の呈示位置を二次元的に変更させる。これにより、視線方向が変更され、結果的に撮像部位が変更される。例えば、撮影光軸と同方向から固視標が呈示されると、眼底の中心部が撮像部位として設定される。また、撮影光軸に対して固視標が上方に呈示されると、眼底の上部が撮像部位として設定される。すなわち、撮影光軸に対する視標の位置に応じて撮影部位が変更される。
【0032】
固視標投影ユニット300としては、例えば、マトリクス状に配列されたLEDの点灯位置により固視位置を調整する構成、光源からの光を光スキャナを用いて走査させ、光源の点灯制御により固視位置を調整する構成、等、種々の構成が考えられる。また、投影ユニット300は、内部固視灯タイプであってもよいし、外部固視灯タイプであってもよい。
【0033】
<制御部>
制御部70は、各構成100〜300の各部材など、装置全体を制御する。また、制御部70は、取得された画像を処理する画像処理部、取得された画像を解析する画像解析部、などを兼用する。制御部70は、一般的なCPU(Central Processing Unit)等で実現される。制御部70は、以下に示すように、断層像に基づいて眼底Efを解析する。
【0034】
制御部70は、OCT光学系100の検出器120から出力される受光信号に基づいて画像処理により断層像(OCT画像)を取得すると共に、正面観察光学系200の受光素子から出力される受光信号に基づいて正面画像(SLO画像)を取得する。また、制御部70は、固視標投影ユニット300を制御して固視位置を変更する。
【0035】
メモリ(記憶部)72、モニタ(表示部)75、操作部76は、それぞれ制御部70と電気的に接続されている。制御部70は、モニタ75の表示画面を制御する。取得された眼底像は、モニタ75に静止画又は動画として出力される他、メモリ72に記憶される。メモリ72は、例えば、撮影された断層像、正面画像、各断層像の撮影位置情報等の撮影に係る各種情報を記録する。また、メモリ72には、断層画像を解析して、眼底部位の各層の有無を判定する解析モードが設けられている。
【0036】
制御部70は、操作部76から出力される操作信号に基づいて、OCT光学系100、正面観察光学系200、固視標投影ユニット300の各部材を制御する。また、モニタ75としては、例えば、タッチパネルが使用され、走査位置、固視位置の設定など各種操作に利用される。なお、上記OCTデバイス10の詳しい構成については、例えば、特開2008−29467号公報を参考にされたい。
【0037】
<断層像の取得>
図3に示すように、制御部70は、OCT光学系100を制御し、設定された領域に対応する三次元断層像を取得すると共に、観察光学系200を制御し、眼底正面像を取得する。そして、制御部70は、OCT光学系100によって三次元断層像、観察光学系200によって眼底正面像を随時取得する。なお、三次元断層像には、XY方向に関して二次元的にAスキャン信号を並べた画像データ、三次元グラフィック画像、などが含まれる。
【0038】
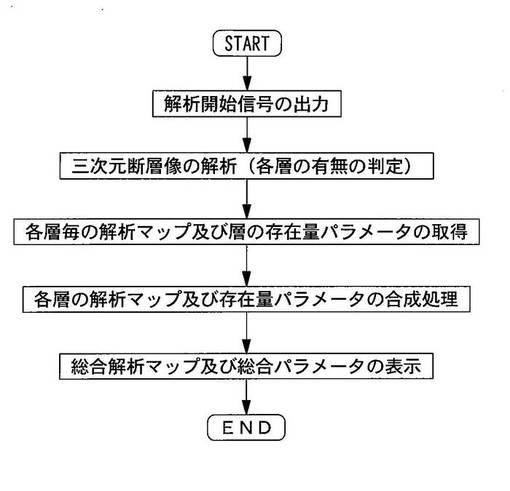
三次元断層像を得るとき、観察光学系200の眼底正面像を用いて、走査位置を設定する。そして、操作部76から解析開始の信号が出力されると、制御部70は、光スキャナ108の動作を制御し、撮像領域に対応する走査範囲において測定光をXY方向に二次元的に走査させることにより三次元断層像を取得する。なお、走査パターンとして、例えば、ラスタースキャン、複数のラインスキャンが考えられる。
【0039】
<解析モード>
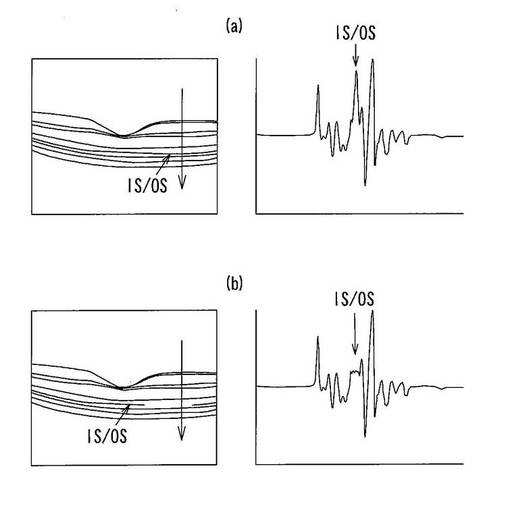
図4はOCT光学系100によって得られた断層像とその輝度分布の例を示す図である。制御部70は、画像解析部を有し、取得された断層像を処理して視機能に関連する網膜層の有無を二次元的に判定し、判定結果に基づいて解析情報を作成する。
【0040】
制御部70は、取得された断層像(例えば、三次元断層像)における眼底の層情報を画像処理により検出すると共に、所定の判定条件(判定基準)を基に各層の存在の有無を判定する。そして、制御部70は、判定結果に基づいて断層像に対する解析結果を得る。そして、その解析結果が断層画像と共にモニタ75上に表示される。なお、本実施形態においては、OCT光学系100によって取得される三次元断層像に基づいて解析が行われる。
【0041】
なお、断層像を処理して有無を判定する場合、制御部70は、断層像を形成する各Aスキャン信号を処理して有無を判定してもよいし、断層像全体を処理して各走査位置での有無を判定してもよい。
【0042】
<層の有無の判定>
各層を検出し、層の有無を判定する場合、例えば、断層画像の輝度レベルが検出され、所定の網膜層(例えば、外境界膜(ELM)、視細胞内節/外節(IS/OS)、Cone Outer Segment Tips(COST)等)に相当する層が画像処理(例えば、エッジ検出)により抽出される。
【0043】
図5は、解析モードの動作について説明するフローチャートを示している。以下の説明においては、網膜層の一例として、視細胞内節/外節(以下、IS/OSと記載する)を例に挙げて、説明をする。断層画像より各層の有無の判定する場合、例えば、制御部70は、各Aスキャン信号の輝度分布を検出し、IS/OSに対応する輝度の上昇が検出されたか否かに応じて、IS/OSの有無を判定する。
【0044】
図4(a)はIS/OSが残存している状態の輝度分布と、図4(b)はIS/OSが消失している状態の輝度分布を示す例である。すなわち、IS/OSが残存している場合、IS/OSに対応するピークが見られるが、IS/OSが消失している場合、IS/OSに対応するピークはなく、RPE(網膜色素上皮層)に対応するピークが現れる。なお、IS/OSの有無を特定する場合、解剖学的に知られている各層の順序、網膜表面からの距離、IS/OSに対応する強い輝度の立ち上がり、などが利用される。
【0045】
なお、上記各層の有無に関する判定処理において、例えば、制御部70は、眼底上の複数の走査位置に関して判定処理を行う。第1の例として、ほぼ全てのAスキャンライン毎に判定処理が行われる。第2の例として、一定間隔で離間したAスキャンライン毎に判定処理が行われる。第3の例として、断層画像上における判定位置が検者によって任意に決定され、そして、決定された位置に関して判定処理が行われる。
【0046】
以上のようにして、制御部70は、被検眼眼底における二次元的なIS/OSの有無に関する判定を行うことにより、IS/OSの有無に関する眼底の二次元的な情報を得る。
【0047】
<解析マップの作成>
本実施例において、制御部70は、前述のように取得された判定結果に基づいて、網膜層が有と判定された網膜層の残存領域(層残存領域)と網膜層が無と判定された網膜層の欠損領域(層欠損領域)の分布状態(二次元分布)を示す解析マップを作成する(図6参照)。
【0048】
また、制御部70は、前述のように取得された層判定の結果に基づく解析パラメータを作成(算出)する(図6参照)。
【0049】
制御部70は、判定結果に基づいて、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づく解析パラメータを算出する。例えば、所定の撮影領域における層残存領域と層欠損領域の割合をパラメータとして算出する。これにより、所定のエリアにおける層の存在量が確認される。
【0050】
より具体的には、パラメータは、層残存領域の面積,と判定領域の総面積との面積比(層残存領域の面積/判定領域の総面積)を用いて表わされる。
【0051】
例えば、制御部70は、IS/OSの判定を行った領域の面積に対して、IS/OSが有ると判定された領域の面積の面積比を算出する。なお、面積比としては、層の有無の割合が確認できるようなパラメータであればよい。例えば、IS/OSの判定を行った領域の面積に対して、IS/OSが無いと判定された領域の面積比を算出してもよい。
【0052】
制御部70は、IS/OS以外のその他の各層についても上記処理と同様にして解析マップ及び解析パラメータを取得する。なお、本実施形態では、ELM、IS/OS、COST、の層の解析結果が用いられる。
【0053】
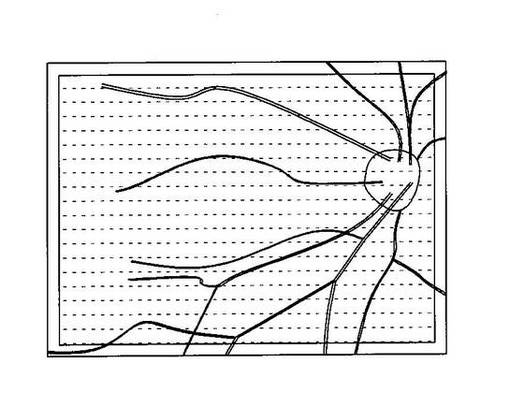
<解析マップ、解析パラメータの表示>
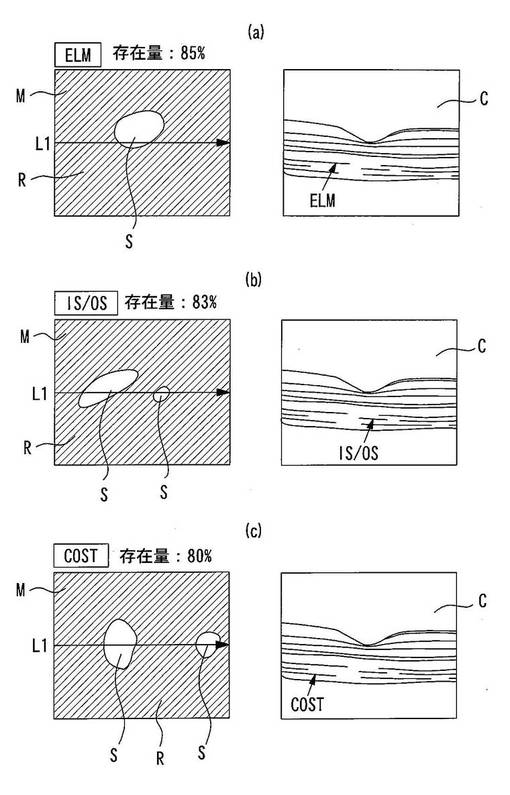
図6は、三次元断層像(マップ画像)Cの解析によって取得されたELM、IS/OS、COSTそれぞれの解析マップと解析パラメータを示す図である。右の断層像は、三次元断層像Cの走査線L1の位置に対応する断層像を示している。
【0054】
図6(a)は、ELMの解析マップを示しており、眼底上の各位置におけるELMの有無を二次元的に示すマップの一例である。図6(b)は、IS/OSの解析マップを示しており、眼底上の各位置におけるIS/OSの有無を二次元的に示すマップの一例である。図6(c)は、COSTの解析マップを示しており、眼底上の各位置におけるCOSTの有無を二次元的に示すマップの一例である。
【0055】
図6に示すように、解析マップは、層の残存領域(存在部位)を示すグラフィック(ハッチングR参照)と、層の欠損領域(非存在部位)を示すグラフィック(非ハッチング領域S参照)と、が判別可能に表示される。また、それぞれの解析にマップには、解析パラメータが対応付けされて記憶されている。
【0056】
<解析マップの合成処理>
制御部70は、取得した各層の解析マップデータを統合させた統合マップを作成すると共に、統合マップに基づく統合解析パラメータを算出する。
【0057】
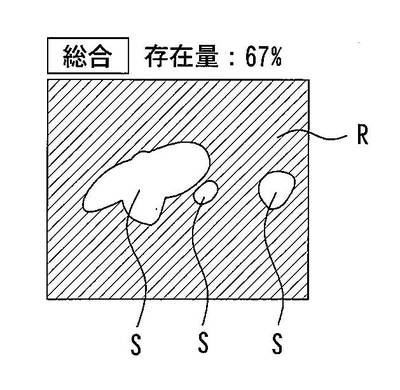
図7は、メモリ72に記憶されたELM、IS/OS、COSTの解析マップを合成処理し作成した統合解析マップの一例を示す図である。制御部70は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する。すなわち、制御部70は、複数の層の解析マップを合成処理し統合解析マップを作成するとともに、判定結果に基づく、解析パラメータ(統合(合成)パラメータ)を取得する。
【0058】
制御部70は、例えば、各層の有無に関するマップデータを統合する場合、深さ方向における各層間の連続性を考慮したマップを作成する。制御部70は、眼底上の各位置において、以下のような処理を行う。制御部70は、断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する。
【0059】
ELM、IS/OS、COSTの中で少なくとも1つの層に欠損領域があった場合、その眼底位置は、非連続領域として判定される。逆にいえば、ELM、IS/OS、COSTの全ての層に欠損領域が無かった場合、その眼底位置は、連続領域として判定される。このようにして、制御部70は、連続性の判定結果に基づいて、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップ(統合解析マップ)を作成する。
【0060】
制御部70は、連続性の判定結果に基づいて、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づく解析パラメータを作成する。例えば、制御部70は、上記連続性に関する判定結果を用いて、所定の撮影領域における連続領域と非連続領域の割合を算出し、算出結果を統合解析パラメータとして算出する。なお、統合パラメータを算出する場合、各層での解析パラメータの値を統合演算(例えば、合成領域の面積比の算出など)するようにしてもよい。
【0061】
以上のようにして、統合解析マップと層の存在量のパラメータ取得すると、制御部70はモニタ75上に統合解析マップと層の存在量のパラメータを表示(出力)する。
【0062】
例えば、統合解析マップは、上記連続領域を示すグラフィック(ハッチングR参照)と、非連続領域を示すグラフィック(非ハッチング領域S参照)と、判別可能に表示される(図6参照)。もちろん、連続性領域と非連続性領域の境界がマーカーで識別可能に分けられた表示形態であってもよい。なお、上記統合解析マップは、欠損領域が優先して、残存領域を塗りつぶすような状態で、各層の解析マップの画像を重畳することによっても、連続性に関する総合解析マップが作成できる。
【0063】
制御部70は、各層の解析マップデータに基づいて各層間の連続性を判定し、その判定に基づく解析マップ及び解析パラメータを作成することにより、複数の層の連続性を確認することができる。これは、例えば、視機能(視力)の診断をサポートすることに用いることができる。視機能は、視細胞から信号伝達系のすべてが存在しないと、視力が確保できない。このため、ELM、IS/OS、COSTの層の有無を判定することによって、視機能が機能しているか否か、又、視機能に異常が生じる可能性があるか否かを確認することができる。すなわち、ELM、IS/OS、COSTの層の内、1つでも欠損が確認できる領域においては、視機能に影響がでる可能性があることが確認できる。
【0064】
なお、上記処理においては、各層毎の解析マップデータに基づいて各層間の連続性を判定するものとしては、これに限定されない。制御部70は、ELM、IS/OS、COSTの有無を一連の処理によって判定することにより、連続性を判定するようにしてもよい。例えば、ELM、IS/OS、COSTから成る複合層の有無の判定を一括して行うようにしてもよい。
【0065】
なお、統合解析を行う場合、上記判定処理に限定されない。第1の例として、制御部70は、所定の組み合わせの層(例えば、ELM、IS/OS、)が無い場合を欠損領域とし、所定の組み合わせの層(例えば、ELM、IS/OS、)がある場合を残存領域として判定する。そして、判定結果に基づいて統合解析マップを作成する。
【0066】
第2の例として、制御部70は、少なくとも3つ以上の層に関し、すべての層が無い場合を欠損領域とし、すべての層がある場合を残存領域として判定する。そして、判定結果に基づいて統合解析マップを作成する。
【0067】
<変容例>
なお、本実施形態においては、解析モードとして、ELM、IS/OS、COSTの層の有無を判定し、合成した結果を表示する構成としたがこれに限定されない。解析モードで表示する結果としては、複数の層の結果を統合した結果を表示すればよい。例えば、制御部70は、複数の層の結果を合成した解析マップとして、ELM、IS/OS、COSTだけではなく、その他の層(例えば、ILM(内境界膜)、NFL(視神経繊維層)、GCL(網膜神経節細胞層)、IPL(内網状層)、OPL(外網状層)、RPE(網膜色素上皮層)等)の解析マップと統合させる。
【0068】
例えば、制御部70は、断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成するようにしてもよい。この場合、制御部70は、視機能に関連する第1の網膜層グループ(例えば、ELM、IS/OS、COST)に関して、上記のような層の有無に関する判定を行い、信号伝達系に関連する第2の網膜層グループ(例えば、ILM、NFL、GCL)に関して、層厚に関する判定を行い、これらを統合させる。層厚に関する判定の例としては、正常眼の層厚範囲から外れた層厚結果を異常部位、層眼の層厚範囲内の層厚結果を正常部位として判定される。なお、視機能に関連する層として、RPEを含む構成としてもよい。
【0069】
例えば、制御部70は、視機能に関する層において少なくとも1つの層がなく、信号伝達系に関する層において異常と判定された位置を、視機能と信号伝達系の両方が異常であると判定する。また、制御部70は、視機能に関する層において少なくとも1つの層がない位置を、視機能が異常である(信号伝達系は正常)と判定し、一方、信号伝達系において異常と判定された位置を、信号伝達系が異常である(視機能系は正常)と判定する。制御部70は、視機能に関する層において少なくとも1つの層がなく、信号伝達系に関する層において正常と判定された位置を、視機能と信号伝達系の両方が正常であると判定する。制御部70は、これらの判定結果が識別可能な解析マップを表示する。制御部70は、異常領域と正常領域との割合を示す解析パラメータを表示する。
【0070】
また、層の有無に関する判定結果と層の膜厚に関する判定結果の両方が表示されるようにしてもよい。例えば、層厚の計測結果又は層厚の計測結果と正常眼データベースと比較結果から、層の異常部位を特定する解析が行われる。この場合、例えば、信号伝達系の層であるNFL、GCL、IPLを単層での解析マップ又は複数の層の合成処理による解析マップにて表示することによって、緑内障の診断をサポートすることができる。なお、層に応じて、解析方法を設定又は変更する構成としてもよい。例えば、信号伝達系の層(NFL、GCL、IPL)を解析する場合においては、層厚による解析を行い、視機能に関する層(ELM、IS/OS、COST)を解析する場合においては、面積比で解析を行う。もちろん、同一層に関して層の有無判定と層厚判定の両方が行われても良い。
【0071】
また、少なくとも2つ以上(例えば、ELMとIS/OS等)の結果を合成処理するものであればよく、検者によって、組み合わせが任意に設定できる構成とすればよい。また、複数の層の結果を合成することなく、複数の解析結果を表示する構成としてもよい。
【0072】
なお、解析モードにて、解析を行う層の設定は、撮影位置(固視灯位置)等の撮影条件に応じて、解析される層等が変更される構成としてもよい。例えば、黄斑部を撮影する場合には、ELM、IS/OS、COSTが解析され解析結果が表示され、乳頭部を撮影する場合には、NFL、GCL、IPLが解析され解析結果が表示されるようにしてもよい。また、疾患名や視機能名等を指定することによって、疾患名や視機能名に関係する適切な撮影パターン(サークルスキャン、ラジアルスキャン等)にて撮影と、適切な層の解析を行う構成としてもよい。
【0073】
なお、本実施形態においては、解析モードとして、複数の層の有無を判定し、合成した結果を表示する構成としたがこれに限定されない。解析モードで表示する結果としては、単層のみの結果であってもよい。例えば、ELMの解析結果のみを合成処理することなく表示するようにしてもよい。
【0074】
なお、本実施形態においては、解析パラメータとして、面積比を用いて表したがこれに限定されない。解析パラメータは、判定結果に基づいて、所定の眼底領域における網膜層の残存領域の寸法情報(長さ情報)、面積情報、体積情報(実際に算出した体積、体積比等)の少なくともいずれかであってもよい。また、所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づく解析パラメータであってもよい。例えば、面積情報として、実際に算出した面積を表示するようにしてもよい。層が存在した画素の数がパラメータとして算出されてもよい。また、体積情報は、面積を算出した領域に対応する深さ方向における情報(例えば、層厚)が三次元断層像より取得され、面積と深さ方向の情報を用いて算出される。そして、各層の体積情報を用いて、三次元解析マップ(カラー三次元マップ)を作成して、表示することができる。また、寸法情報は、解析マップの縦方向及び横方向の情報を用いて算出される。もちろん、面積情報と体積情報と寸法情報のすべてを表示するようにしてもよい。
【0075】
なお、本実施形態においては、層の存在量を示すパラメータとして、面積比の数値を表示する構成としたがこれに限定されない。数値で表示するだけでなく、棒グラフ、レーダチャート等にて表示する方法がある。例えば、レーダチャートや棒グラフにて表示をする場合、脳への信号伝達系に関係する層(NFL、GCL、IPL)等を含めて表示される。この場合、それぞれの層(NFL、GCL、IPL、ELM、IS/OS、COST)の存在率がそれぞれ表示される。
【0076】
なお、本実施形態において、各層の連続性をパラメータ表示する構成としてもよい。例えば、各層の有無に基づいて、連続性がある部位の割合(複数の層の内で所定の層がすべて存在する)、非連続性(複数の層の内で所定の層が一部存在しない)の部位の割合、全層欠損性(複数の層の内で所定の層が全て存在しない)の部位の割合を表示する。この割合に基づくパラメータ表示を行うようにしてもよい。もちろん、連続性、非連続性、欠損性、を段階的に表示する構成としてもよい。
【0077】
なお、本実施形態においては、眼底上の走査位置毎に判定処理を行う構成としたがこれに限定されない。三次元断層像を取得後に、断層像全体に対して判定処理を行う構成としてもよい。例えば、三次元断層像を取得後に、Voxel単位で画像解析を行い、各層面を検出し、判定処理を行ってもよい。
【0078】
なお、本実施形態において、所定領域において、解析が行われる構成としてもよい。例えば、中心窩を中心とするφ6mm領域において、解析マップが作成される構成としてもよい。これによって、解析領域が少なくてよいため、解析時間の短縮につながる。また、φ1mmやφ3mmの領域としてもよく、検者が任意に設定できる構成としてもよい。このとき、複数の領域にて解析結果を算出し、各解析結果と視力値と比較することによって、視力と解析領域との相関関係を確認することができる。さらに、視力との相関関係が現われやすい解析領域の解析結果と視力を同時に表示することで、層と視機能との関係を確認することができる。
【0079】
また、上記記載と同様にして、各解析結果と視機能(例えば、視感度、分解能、動体視力、QOV(Quality of vision)等)と比較することによって、視機能と解析領域との相関関係を確認することができる。そして、視機能との相関関係が現われやすい解析領域の解析結果と視機能を同時に表示することで、層と視機能との関係を確認することができる。視機能の表示方法としては、レーダチャートや棒グラフ表示等が挙げられる。
【0080】
なお、本実施形態においては、眼底撮影装置10としてOCTデバイスを用いる構成としたがこれに限定されない。本発明は、眼底画像を撮影可能な光学系を備えた装置に対して、適用可能である。例えば、所定の眼底撮影装置にて眼底画像を取得し、取得した眼底画像に解析結果を重畳処理し、表示する。眼底撮影装置は、レーザ光を眼底上で走査させる光スキャナを持ち、眼底の正面像を得るために被検眼眼底で反射した光束を受光する走査型眼底撮影光学系を備えたSLOが挙げられる。また、眼底カメラ等によって取得される眼底画像に対しても適用される。
【0081】
なお、本実施形態において、所定の層の統合処理を行う際に、各層の評価機能毎に重み付けをしてから統合処理を行ってもよい。例えば、視機能に大きく関係しているとされる層については、その層の解析パラメータの影響を大きく(割合を大きく)して、その他の層との合成処理を行う。
【0082】
なお、本実施形態において、特徴的な部位に関する各層の欠損状態を解析パラメータとして含めてもよい。例えば、中心窩部分に対応する層が欠損している場合には、視機能が機能しない可能性があることを表示するようにする。
【0083】
なお、本実施形態においては、三次元画像を解析する構成としたがこれに限定されない。例えば、所定のスキャン位置における断層像の加算平均画像を取得する。そして、ある横断方向に関する加算平均断層像(Bスキャン画像)において、層の有無を判定することによって、所定のスキャンラインにおける層の解析を行うことができる。
【0084】
なお、本発明は経過観察に適用することもできる。例えば、異なる日時で撮影した同一の被検眼の画像において、解析処理をそれぞれ行い、それらの解析処理結果を表示するようにしてもよい。表示方法としては、比較できる表示方法であればよい。例えば、撮影日時の異なる解析マップを並べて表示してもよいし、撮影日時の異なる解析パラメータをグラフにて表示するようにしてもよい。
【0085】
なお、本発明は、他装置の測定結果と比較するようにしてもよい。例えば、視野計のよる測定結果(視野データ)と比較することが挙げられる。この場合、取得した解析マップと視野計による測定結果の位置合わせを行い、重畳表示するようにする。これによって、層の存在と視力との関係を確認することができる。
【0086】
なお、本実施形態において、観察光学系200によって取得された眼底正面像に解析マップを重畳処理させる構成としてもよい。例えば、制御部70は、統合解析マップと層の存在量のパラメータを観察光学系200で取得された眼底正面像上に表示させる。この場合、制御部70は、眼底正面像に対し、統合解析マップを画像処理により重畳させ、統合解析マップと眼底正面像とを関連付ける。そして、制御部70は、統合解析マップと眼底正面像との重畳画像をモニタ75に表示する。このとき、制御部70は、眼底正面像と統合解析マップとを分離した状態で表示してもよい。なお、制御部70は、解析に用いた三次元断層像からOCT正面像を生成し、生成されたOCT正面像と解析マップとを関連付けさせることによって、pixel-to-pixelの関係で両データを対応付けできる。
【0087】
なお、本発明においては、本実施形態に記載した装置に限定されない。例えば、上記実施形態の機能を行う眼底解析ソフトウェア(プログラム)をネットワークや各種記憶媒体を介して、システムあるいは装置に供給する。そして、システムあるいは装置のコンピュータ(例えば、CPU等)がプログラムを読み出し、実行することも可能である。
【図面の簡単な説明】
【0088】
【図1】本実施形態に係る眼底解析装置の構成について説明するブロック図である。
【図2】本実施形態に係る眼底撮影装置の構成について説明する概略構成図である。
【図3】観察光学系によって取得された眼底正面像の例を示す図である。
【図4】OCT光学系によって得られた断層像とその輝度分布の例を示す図である。
【図5】解析モードの動作について説明するフローチャートを示している。
【図6】三次元断層像の解析によって取得されたELM、IS/OS、COSTそれぞれの解析マップと解析パラメータを示す図である。
【図7】ELM、IS/OS、COSTの解析マップを合成処理し作成した統合解析マップの一例を示す図である。
【符号の説明】
【0089】
1 眼底解析装置
10 眼底撮影装置(光コヒーレンストモグラフィーデバイス)
70 制御部
72 メモリ
75 モニタ
76 操作部
100 干渉光学系(OCT光学系)
108 光スキャナ
120 検出器
200 正面観察光学系
300 固視標投影ユニット
【技術分野】
【0001】
被検眼眼底の断層像を解析する眼底解析装置及びプログラムに関する。
【背景技術】
【0002】
従来、光干渉技術を用いて眼底の断層画像を取得し、得られた眼底の断層画像(網膜断層画像)から被検眼の状態を評価するための眼底解析装置が知られている(特許文献1参照)。
【0003】
このような眼底解析装置では、赤外光により得られる眼底正面画像がモニタに表示され、眼底画像のある領域(部位)が選択される。そして、選択した領域の眼底断層画像が光干渉技術を用いて取得され、パーソナル・コンピュータの記憶部(例えば、ハードディスク)などに一旦保存される。その後、取得された眼底断層画像は、パーソナル・コンピュータ(PC)等によって解析され、PCのモニタ上に解析結果が表示される。検者はこのようにして得られた眼底断層画像の解析結果を見て被検眼の異常の有無等を判断している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−29467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来は、断層像を取得し、その後、断層像を解析する場合、各層の厚み(層厚)等を計測し、疾患部等の診断情報として利用されていた。
【0006】
ところで、視細胞から信号伝達系のすべてが存在しないと、視力が確保できない可能性がある。なぜなら、視機能に関連する網膜層(例えば、IS/OS、COST、ELM)で検出された信号は、信号伝達系に関連する網膜層(例えば、NFL、GCL、IPL)を介して脳に伝達される。ともすれば、これらにいずれかに異常があることで、人眼の視力に影響を及ぼす可能性がある。
【0007】
これらの事情を考慮した場合、層厚の計測結果等の情報だけでは、眼底の診断において十分とはいえないと考える。
【0008】
上記従来技術の問題点に鑑み、診断に有用な情報を提供できる眼底撮影装置を提供することを技術課題とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明は以下のような構成を備えることを特徴とする。
【0010】
(1) 光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、前記光コヒーレンストモグラフィーデバイスによって取得された前記断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、を備えることを特徴とする。
(2) 前記解析手段は、判定結果に基づいて、網膜層の残存領域と欠損領域の分布状態を示す解析マップを作成する(1)の眼底解析装置。
(3) 前記解析手段は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する(1)〜(2)のいずれかの眼底解析装置。
(4) 前記解析手段は、前記断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する(1)〜(3)のいずれかの眼底解析装置。
(5) 前記解析手段は、前記判定結果に基づく解析パラメータを作成する(1)〜(4)のいずれかの眼底解析装置。
(6) 前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づくパラメータである(1)〜(5)のいずれかの眼底解析装置。
(7) 前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域の寸法情報、面積情報、体積情報の少なくともいずれか、又は所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づくパラメータである(1)〜(6)のいずれかの眼底解析装置。
(8) 前記解析手段による解析情報を出力する出力手段を備える(1)〜(7)のいずれかの眼底解析装置。
(9) 視機能に関連する網膜層は、ELM、IS/OS、COST、RPEのいずれかである(1)〜(8)のいずれかの眼底解析装置。
(10) 前記解析手段は、前記連続性の判定結果に基づく解析マップを作成し、該解析マップは、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップである(4)の眼底解析装置。
(11) 前記解析手段は、前記連続性の判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づくパラメータである(4)の眼底解析装置。
(12) 前記解析手段は、前記断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、前記視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成する(1)〜(11)のいずれかの眼底解析装置。
(13) 前記解析手段は、視機能に関連する網膜層の有無を二次元的に判定する(1)〜(12)のいずれかの眼底解析装置。
(14) 記憶手段に記憶された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析工程と、前記解析工程による解析情報をモニタに出力する出力工程と、をコンピュータに実行させる眼底解析プログラム。
【発明の効果】
【0011】
本発明によれば、診断に有用な情報を提供できる。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を図面に基づいて説明する。図1は本実施形態に係る眼底解析装置の構成について説明するブロック図である。
【0013】
眼底撮影装置10によって撮影された眼底画像をモニタ上で観察するための眼底解析装置1は、CPU(演算制御部)70と、マウス(操作部)76と、メモリ(記憶部)72と、モニタ75と、から構成され、各部はバス等を介してCPU70と電気的に接続されている。
【0014】
制御部70は、メモリ72に記憶されている眼科解析プログラム及び各種制御プログラムに基づいて各部の動作を制御する。この眼科解析プログラムをコンピュータ上で実行させることによって眼底解析装置1を使用することが可能となる。なお、制御部70、操作部76、メモリ72、モニタ75として、市販のPC(パーソナルコンピュータ)が持つ演算処理部、入力部、記憶部、表示部を用い、市販のPCに眼科解析プログラムをインストールするようにしてもよい。
【0015】
なお、眼底解析装置1には、被検眼の所定部位における画像を撮影するための眼底撮影装置10が接続されている。本実施形態においては、眼底撮影装置10として、被検者眼Eの眼底Efの断層像を撮影するための光コヒーレンストモグラフィーデバイス(OCTデバイス)を例に挙げて説明する。なお、本実施形態においては、眼底解析装置1に眼底撮影装置10が接続されている構成を例としているがこれに限定されない。眼底解析装置1に眼底撮影装置10が一体となった装置であってもよい。
【0016】
図2は本実施形態に係る眼底撮影装置の構成について説明する概略構成図である。なお、本実施形態においては、被検者眼(眼E)の軸方向をZ方向、水平方向をX方向、鉛直方向をY方向として説明する。眼底の表面方向をXY方向として考えても良い。
【0017】
以下、図1と図2を用いて装置構成の概略を説明する。本眼底撮影装置は、被検者眼Eの眼底Efの断層像を撮影するための光コヒーレンストモグラフィーデバイス(OCTデバイス)10である。OCTデバイス10は、干渉光学系(OCT光学系)100と、正面観察光学系200と、固視標投影ユニット300と、を含む。そして、OCTデバイス10は、制御部70と接続されている。すなわち、眼底解析装置1とOCTデバイス10が接続されている。
【0018】
OCT光学系100は、眼底に測定光を照射する。OCT光学系100は、眼底から反射された測定光と,参照光との干渉状態を受光素子(検出器120)によって検出する。OCT光学系100は、眼底Ef上の撮像位置を変更するため、眼底Ef上における測定光の照射位置を変更する照射位置変更ユニット(例えば、光スキャナ108、固視標投影ユニット300)を備える。制御部70は、設定された撮像位置情報に基づいて照射位置変更ユニットの動作を制御し、検出器120からの受光信号に基づいて断層像を取得する。
【0019】
<OCT光学系>
OCT光学系100は、いわゆる眼科用光断層干渉計(OCT:Optical coherence tomography)の装置構成を持ち、眼Eの断層像を撮像する。OCT光学系100は、測定光源102から出射された光をカップラー(光分割器)104によって測定光(試料光)と参照光に分割する。そして、OCT光学系100は、測定光学系106によって測定光を眼Eの眼底Efに導き,また、参照光を参照光学系110に導く。その後、眼底Efによって反射された測定光と,参照光との合成による干渉光を検出器(受光素子)120に受光させる。
【0020】
検出器120は、測定光と参照光との干渉状態を検出する。フーリエドメインOCTの場合では、干渉光のスペクトル強度が検出器120によって検出され、スペクトル強度データに対するフーリエ変換によって所定範囲における深さプロファイル(Aスキャン信号)が取得される。例えば、Spectral-domain OCT(SD−OCT)、Swept-source OCT(SS−OCT)が挙げられる。また、Time-domain OCT(TD−OCT)であってもよい。
【0021】
SD−OCTの場合、光源102として低コヒーレント光源(広帯域光源)が用いられ、検出器120には、干渉光を各周波数成分(各波長成分)に分光する分光光学系(スペクトルメータ)が設けられる。スペクトルメータは、例えば、回折格子とラインセンサからなる。
【0022】
SS−OCTの場合、光源102として出射波長を時間的に高速で変化させる波長走査型光源(波長可変光源)が用いられ、検出器120として、例えば、単一の受光素子が設けられる。光源102は、例えば、光源、ファイバーリング共振器、及び波長選択フィルタによって構成される。そして、波長選択フィルタとして、例えば、回折格子とポリゴンミラーの組み合わせ、ファブリー・ペローエタロンを用いたものが挙げられる。
【0023】
光源102から出射された光は、カップラー104によって測定光束と参照光束に分割される。そして、測定光束は、光ファイバーを通過した後、空気中へ出射される。その光束は、光スキャナ108、及び測定光学系106の他の光学部材を介して眼底Efに集光される。そして、眼底Efで反射された光は、同様の光路を経て光ファイバーに戻される。
【0024】
光スキャナ108は、眼底上で二次元的に(XY方向(横断方向))に測定光を走査させる。光スキャナ108は、瞳孔と略共役な位置に配置される。光スキャナ108は、例えば、2つのガルバノミラーであり、その反射角度が駆動機構50によって任意に調整される。
【0025】
これにより、光源102から出射された光束はその反射(進行)方向が変化され、眼底上で任意の方向に走査される。これにより、眼底Ef上における撮像位置が変更される。光スキャナ108としては、光を偏向させる構成であればよい。例えば、反射ミラー(ガルバノミラー、ポリゴンミラー、レゾナントスキャナ)の他、光の進行(偏向)方向を変化させる音響光学素子(AOM)等が用いられる。
【0026】
参照光学系110は、眼底Efでの測定光の反射によって取得される反射光と合成される参照光を生成する。参照光学系110は、マイケルソンタイプであってもよいし、マッハツェンダタイプであっても良い。参照光学系110は、例えば、反射光学系(例えば、参照ミラー)によって形成され、カップラー104からの光を反射光学系により反射することにより再度カップラー104に戻し、検出器120に導く。他の例としては、参照光学系110は、透過光学系(例えば、光ファイバー)によって形成され、カップラー104からの光を戻さず透過させることにより検出器120へと導く。
【0027】
参照光学系110は、参照光路中の光学部材を移動させることにより、測定光と参照光との光路長差を変更する構成を有する。例えば、参照ミラーが光軸方向に移動される。光路長差を変更するための構成は、測定光学系106の測定光路中に配置されてもよい。
【0028】
<正面観察光学系>
正面観察光学系200は、眼底Efの正面画像を得るために設けられている。観察光学系200は、例えば、光源から発せられた測定光(例えば、赤外光)を眼底上で二次元的に走査させる光スキャナと、眼底と略共役位置に配置された共焦点開口を介して眼底反射光を受光する第2の受光素子と、を備え、いわゆる眼科用走査型レーザ検眼鏡(SLO)の装置構成を持つ。
【0029】
なお、観察光学系200の構成としては、いわゆる眼底カメラタイプの構成であってもよい。また、OCT光学系100は、観察光学系200を兼用してもよい。すなわち、正面画像は、二次元的に得られた断層像を形成するデータを用いて取得されるようにしてもよい(例えば、三次元断層像の深さ方向への積算画像、XY各位置でのスペクトルデータの積算値、ある一定の深さ方向におけるXY各位置での輝度データ、網膜表層画像、等)。
【0030】
<固視標投影ユニット>
固視標投影ユニット300は、眼Eの視線方向を誘導するための光学系を有する。投影ユニット300は、眼Eに呈示する固視標を有し、複数の方向に眼Eを誘導できる。
【0031】
例えば、固視標投影ユニット300は、可視光を発する可視光源を有し、視標の呈示位置を二次元的に変更させる。これにより、視線方向が変更され、結果的に撮像部位が変更される。例えば、撮影光軸と同方向から固視標が呈示されると、眼底の中心部が撮像部位として設定される。また、撮影光軸に対して固視標が上方に呈示されると、眼底の上部が撮像部位として設定される。すなわち、撮影光軸に対する視標の位置に応じて撮影部位が変更される。
【0032】
固視標投影ユニット300としては、例えば、マトリクス状に配列されたLEDの点灯位置により固視位置を調整する構成、光源からの光を光スキャナを用いて走査させ、光源の点灯制御により固視位置を調整する構成、等、種々の構成が考えられる。また、投影ユニット300は、内部固視灯タイプであってもよいし、外部固視灯タイプであってもよい。
【0033】
<制御部>
制御部70は、各構成100〜300の各部材など、装置全体を制御する。また、制御部70は、取得された画像を処理する画像処理部、取得された画像を解析する画像解析部、などを兼用する。制御部70は、一般的なCPU(Central Processing Unit)等で実現される。制御部70は、以下に示すように、断層像に基づいて眼底Efを解析する。
【0034】
制御部70は、OCT光学系100の検出器120から出力される受光信号に基づいて画像処理により断層像(OCT画像)を取得すると共に、正面観察光学系200の受光素子から出力される受光信号に基づいて正面画像(SLO画像)を取得する。また、制御部70は、固視標投影ユニット300を制御して固視位置を変更する。
【0035】
メモリ(記憶部)72、モニタ(表示部)75、操作部76は、それぞれ制御部70と電気的に接続されている。制御部70は、モニタ75の表示画面を制御する。取得された眼底像は、モニタ75に静止画又は動画として出力される他、メモリ72に記憶される。メモリ72は、例えば、撮影された断層像、正面画像、各断層像の撮影位置情報等の撮影に係る各種情報を記録する。また、メモリ72には、断層画像を解析して、眼底部位の各層の有無を判定する解析モードが設けられている。
【0036】
制御部70は、操作部76から出力される操作信号に基づいて、OCT光学系100、正面観察光学系200、固視標投影ユニット300の各部材を制御する。また、モニタ75としては、例えば、タッチパネルが使用され、走査位置、固視位置の設定など各種操作に利用される。なお、上記OCTデバイス10の詳しい構成については、例えば、特開2008−29467号公報を参考にされたい。
【0037】
<断層像の取得>
図3に示すように、制御部70は、OCT光学系100を制御し、設定された領域に対応する三次元断層像を取得すると共に、観察光学系200を制御し、眼底正面像を取得する。そして、制御部70は、OCT光学系100によって三次元断層像、観察光学系200によって眼底正面像を随時取得する。なお、三次元断層像には、XY方向に関して二次元的にAスキャン信号を並べた画像データ、三次元グラフィック画像、などが含まれる。
【0038】
三次元断層像を得るとき、観察光学系200の眼底正面像を用いて、走査位置を設定する。そして、操作部76から解析開始の信号が出力されると、制御部70は、光スキャナ108の動作を制御し、撮像領域に対応する走査範囲において測定光をXY方向に二次元的に走査させることにより三次元断層像を取得する。なお、走査パターンとして、例えば、ラスタースキャン、複数のラインスキャンが考えられる。
【0039】
<解析モード>
図4はOCT光学系100によって得られた断層像とその輝度分布の例を示す図である。制御部70は、画像解析部を有し、取得された断層像を処理して視機能に関連する網膜層の有無を二次元的に判定し、判定結果に基づいて解析情報を作成する。
【0040】
制御部70は、取得された断層像(例えば、三次元断層像)における眼底の層情報を画像処理により検出すると共に、所定の判定条件(判定基準)を基に各層の存在の有無を判定する。そして、制御部70は、判定結果に基づいて断層像に対する解析結果を得る。そして、その解析結果が断層画像と共にモニタ75上に表示される。なお、本実施形態においては、OCT光学系100によって取得される三次元断層像に基づいて解析が行われる。
【0041】
なお、断層像を処理して有無を判定する場合、制御部70は、断層像を形成する各Aスキャン信号を処理して有無を判定してもよいし、断層像全体を処理して各走査位置での有無を判定してもよい。
【0042】
<層の有無の判定>
各層を検出し、層の有無を判定する場合、例えば、断層画像の輝度レベルが検出され、所定の網膜層(例えば、外境界膜(ELM)、視細胞内節/外節(IS/OS)、Cone Outer Segment Tips(COST)等)に相当する層が画像処理(例えば、エッジ検出)により抽出される。
【0043】
図5は、解析モードの動作について説明するフローチャートを示している。以下の説明においては、網膜層の一例として、視細胞内節/外節(以下、IS/OSと記載する)を例に挙げて、説明をする。断層画像より各層の有無の判定する場合、例えば、制御部70は、各Aスキャン信号の輝度分布を検出し、IS/OSに対応する輝度の上昇が検出されたか否かに応じて、IS/OSの有無を判定する。
【0044】
図4(a)はIS/OSが残存している状態の輝度分布と、図4(b)はIS/OSが消失している状態の輝度分布を示す例である。すなわち、IS/OSが残存している場合、IS/OSに対応するピークが見られるが、IS/OSが消失している場合、IS/OSに対応するピークはなく、RPE(網膜色素上皮層)に対応するピークが現れる。なお、IS/OSの有無を特定する場合、解剖学的に知られている各層の順序、網膜表面からの距離、IS/OSに対応する強い輝度の立ち上がり、などが利用される。
【0045】
なお、上記各層の有無に関する判定処理において、例えば、制御部70は、眼底上の複数の走査位置に関して判定処理を行う。第1の例として、ほぼ全てのAスキャンライン毎に判定処理が行われる。第2の例として、一定間隔で離間したAスキャンライン毎に判定処理が行われる。第3の例として、断層画像上における判定位置が検者によって任意に決定され、そして、決定された位置に関して判定処理が行われる。
【0046】
以上のようにして、制御部70は、被検眼眼底における二次元的なIS/OSの有無に関する判定を行うことにより、IS/OSの有無に関する眼底の二次元的な情報を得る。
【0047】
<解析マップの作成>
本実施例において、制御部70は、前述のように取得された判定結果に基づいて、網膜層が有と判定された網膜層の残存領域(層残存領域)と網膜層が無と判定された網膜層の欠損領域(層欠損領域)の分布状態(二次元分布)を示す解析マップを作成する(図6参照)。
【0048】
また、制御部70は、前述のように取得された層判定の結果に基づく解析パラメータを作成(算出)する(図6参照)。
【0049】
制御部70は、判定結果に基づいて、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づく解析パラメータを算出する。例えば、所定の撮影領域における層残存領域と層欠損領域の割合をパラメータとして算出する。これにより、所定のエリアにおける層の存在量が確認される。
【0050】
より具体的には、パラメータは、層残存領域の面積,と判定領域の総面積との面積比(層残存領域の面積/判定領域の総面積)を用いて表わされる。
【0051】
例えば、制御部70は、IS/OSの判定を行った領域の面積に対して、IS/OSが有ると判定された領域の面積の面積比を算出する。なお、面積比としては、層の有無の割合が確認できるようなパラメータであればよい。例えば、IS/OSの判定を行った領域の面積に対して、IS/OSが無いと判定された領域の面積比を算出してもよい。
【0052】
制御部70は、IS/OS以外のその他の各層についても上記処理と同様にして解析マップ及び解析パラメータを取得する。なお、本実施形態では、ELM、IS/OS、COST、の層の解析結果が用いられる。
【0053】
<解析マップ、解析パラメータの表示>
図6は、三次元断層像(マップ画像)Cの解析によって取得されたELM、IS/OS、COSTそれぞれの解析マップと解析パラメータを示す図である。右の断層像は、三次元断層像Cの走査線L1の位置に対応する断層像を示している。
【0054】
図6(a)は、ELMの解析マップを示しており、眼底上の各位置におけるELMの有無を二次元的に示すマップの一例である。図6(b)は、IS/OSの解析マップを示しており、眼底上の各位置におけるIS/OSの有無を二次元的に示すマップの一例である。図6(c)は、COSTの解析マップを示しており、眼底上の各位置におけるCOSTの有無を二次元的に示すマップの一例である。
【0055】
図6に示すように、解析マップは、層の残存領域(存在部位)を示すグラフィック(ハッチングR参照)と、層の欠損領域(非存在部位)を示すグラフィック(非ハッチング領域S参照)と、が判別可能に表示される。また、それぞれの解析にマップには、解析パラメータが対応付けされて記憶されている。
【0056】
<解析マップの合成処理>
制御部70は、取得した各層の解析マップデータを統合させた統合マップを作成すると共に、統合マップに基づく統合解析パラメータを算出する。
【0057】
図7は、メモリ72に記憶されたELM、IS/OS、COSTの解析マップを合成処理し作成した統合解析マップの一例を示す図である。制御部70は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する。すなわち、制御部70は、複数の層の解析マップを合成処理し統合解析マップを作成するとともに、判定結果に基づく、解析パラメータ(統合(合成)パラメータ)を取得する。
【0058】
制御部70は、例えば、各層の有無に関するマップデータを統合する場合、深さ方向における各層間の連続性を考慮したマップを作成する。制御部70は、眼底上の各位置において、以下のような処理を行う。制御部70は、断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する。
【0059】
ELM、IS/OS、COSTの中で少なくとも1つの層に欠損領域があった場合、その眼底位置は、非連続領域として判定される。逆にいえば、ELM、IS/OS、COSTの全ての層に欠損領域が無かった場合、その眼底位置は、連続領域として判定される。このようにして、制御部70は、連続性の判定結果に基づいて、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップ(統合解析マップ)を作成する。
【0060】
制御部70は、連続性の判定結果に基づいて、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づく解析パラメータを作成する。例えば、制御部70は、上記連続性に関する判定結果を用いて、所定の撮影領域における連続領域と非連続領域の割合を算出し、算出結果を統合解析パラメータとして算出する。なお、統合パラメータを算出する場合、各層での解析パラメータの値を統合演算(例えば、合成領域の面積比の算出など)するようにしてもよい。
【0061】
以上のようにして、統合解析マップと層の存在量のパラメータ取得すると、制御部70はモニタ75上に統合解析マップと層の存在量のパラメータを表示(出力)する。
【0062】
例えば、統合解析マップは、上記連続領域を示すグラフィック(ハッチングR参照)と、非連続領域を示すグラフィック(非ハッチング領域S参照)と、判別可能に表示される(図6参照)。もちろん、連続性領域と非連続性領域の境界がマーカーで識別可能に分けられた表示形態であってもよい。なお、上記統合解析マップは、欠損領域が優先して、残存領域を塗りつぶすような状態で、各層の解析マップの画像を重畳することによっても、連続性に関する総合解析マップが作成できる。
【0063】
制御部70は、各層の解析マップデータに基づいて各層間の連続性を判定し、その判定に基づく解析マップ及び解析パラメータを作成することにより、複数の層の連続性を確認することができる。これは、例えば、視機能(視力)の診断をサポートすることに用いることができる。視機能は、視細胞から信号伝達系のすべてが存在しないと、視力が確保できない。このため、ELM、IS/OS、COSTの層の有無を判定することによって、視機能が機能しているか否か、又、視機能に異常が生じる可能性があるか否かを確認することができる。すなわち、ELM、IS/OS、COSTの層の内、1つでも欠損が確認できる領域においては、視機能に影響がでる可能性があることが確認できる。
【0064】
なお、上記処理においては、各層毎の解析マップデータに基づいて各層間の連続性を判定するものとしては、これに限定されない。制御部70は、ELM、IS/OS、COSTの有無を一連の処理によって判定することにより、連続性を判定するようにしてもよい。例えば、ELM、IS/OS、COSTから成る複合層の有無の判定を一括して行うようにしてもよい。
【0065】
なお、統合解析を行う場合、上記判定処理に限定されない。第1の例として、制御部70は、所定の組み合わせの層(例えば、ELM、IS/OS、)が無い場合を欠損領域とし、所定の組み合わせの層(例えば、ELM、IS/OS、)がある場合を残存領域として判定する。そして、判定結果に基づいて統合解析マップを作成する。
【0066】
第2の例として、制御部70は、少なくとも3つ以上の層に関し、すべての層が無い場合を欠損領域とし、すべての層がある場合を残存領域として判定する。そして、判定結果に基づいて統合解析マップを作成する。
【0067】
<変容例>
なお、本実施形態においては、解析モードとして、ELM、IS/OS、COSTの層の有無を判定し、合成した結果を表示する構成としたがこれに限定されない。解析モードで表示する結果としては、複数の層の結果を統合した結果を表示すればよい。例えば、制御部70は、複数の層の結果を合成した解析マップとして、ELM、IS/OS、COSTだけではなく、その他の層(例えば、ILM(内境界膜)、NFL(視神経繊維層)、GCL(網膜神経節細胞層)、IPL(内網状層)、OPL(外網状層)、RPE(網膜色素上皮層)等)の解析マップと統合させる。
【0068】
例えば、制御部70は、断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成するようにしてもよい。この場合、制御部70は、視機能に関連する第1の網膜層グループ(例えば、ELM、IS/OS、COST)に関して、上記のような層の有無に関する判定を行い、信号伝達系に関連する第2の網膜層グループ(例えば、ILM、NFL、GCL)に関して、層厚に関する判定を行い、これらを統合させる。層厚に関する判定の例としては、正常眼の層厚範囲から外れた層厚結果を異常部位、層眼の層厚範囲内の層厚結果を正常部位として判定される。なお、視機能に関連する層として、RPEを含む構成としてもよい。
【0069】
例えば、制御部70は、視機能に関する層において少なくとも1つの層がなく、信号伝達系に関する層において異常と判定された位置を、視機能と信号伝達系の両方が異常であると判定する。また、制御部70は、視機能に関する層において少なくとも1つの層がない位置を、視機能が異常である(信号伝達系は正常)と判定し、一方、信号伝達系において異常と判定された位置を、信号伝達系が異常である(視機能系は正常)と判定する。制御部70は、視機能に関する層において少なくとも1つの層がなく、信号伝達系に関する層において正常と判定された位置を、視機能と信号伝達系の両方が正常であると判定する。制御部70は、これらの判定結果が識別可能な解析マップを表示する。制御部70は、異常領域と正常領域との割合を示す解析パラメータを表示する。
【0070】
また、層の有無に関する判定結果と層の膜厚に関する判定結果の両方が表示されるようにしてもよい。例えば、層厚の計測結果又は層厚の計測結果と正常眼データベースと比較結果から、層の異常部位を特定する解析が行われる。この場合、例えば、信号伝達系の層であるNFL、GCL、IPLを単層での解析マップ又は複数の層の合成処理による解析マップにて表示することによって、緑内障の診断をサポートすることができる。なお、層に応じて、解析方法を設定又は変更する構成としてもよい。例えば、信号伝達系の層(NFL、GCL、IPL)を解析する場合においては、層厚による解析を行い、視機能に関する層(ELM、IS/OS、COST)を解析する場合においては、面積比で解析を行う。もちろん、同一層に関して層の有無判定と層厚判定の両方が行われても良い。
【0071】
また、少なくとも2つ以上(例えば、ELMとIS/OS等)の結果を合成処理するものであればよく、検者によって、組み合わせが任意に設定できる構成とすればよい。また、複数の層の結果を合成することなく、複数の解析結果を表示する構成としてもよい。
【0072】
なお、解析モードにて、解析を行う層の設定は、撮影位置(固視灯位置)等の撮影条件に応じて、解析される層等が変更される構成としてもよい。例えば、黄斑部を撮影する場合には、ELM、IS/OS、COSTが解析され解析結果が表示され、乳頭部を撮影する場合には、NFL、GCL、IPLが解析され解析結果が表示されるようにしてもよい。また、疾患名や視機能名等を指定することによって、疾患名や視機能名に関係する適切な撮影パターン(サークルスキャン、ラジアルスキャン等)にて撮影と、適切な層の解析を行う構成としてもよい。
【0073】
なお、本実施形態においては、解析モードとして、複数の層の有無を判定し、合成した結果を表示する構成としたがこれに限定されない。解析モードで表示する結果としては、単層のみの結果であってもよい。例えば、ELMの解析結果のみを合成処理することなく表示するようにしてもよい。
【0074】
なお、本実施形態においては、解析パラメータとして、面積比を用いて表したがこれに限定されない。解析パラメータは、判定結果に基づいて、所定の眼底領域における網膜層の残存領域の寸法情報(長さ情報)、面積情報、体積情報(実際に算出した体積、体積比等)の少なくともいずれかであってもよい。また、所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づく解析パラメータであってもよい。例えば、面積情報として、実際に算出した面積を表示するようにしてもよい。層が存在した画素の数がパラメータとして算出されてもよい。また、体積情報は、面積を算出した領域に対応する深さ方向における情報(例えば、層厚)が三次元断層像より取得され、面積と深さ方向の情報を用いて算出される。そして、各層の体積情報を用いて、三次元解析マップ(カラー三次元マップ)を作成して、表示することができる。また、寸法情報は、解析マップの縦方向及び横方向の情報を用いて算出される。もちろん、面積情報と体積情報と寸法情報のすべてを表示するようにしてもよい。
【0075】
なお、本実施形態においては、層の存在量を示すパラメータとして、面積比の数値を表示する構成としたがこれに限定されない。数値で表示するだけでなく、棒グラフ、レーダチャート等にて表示する方法がある。例えば、レーダチャートや棒グラフにて表示をする場合、脳への信号伝達系に関係する層(NFL、GCL、IPL)等を含めて表示される。この場合、それぞれの層(NFL、GCL、IPL、ELM、IS/OS、COST)の存在率がそれぞれ表示される。
【0076】
なお、本実施形態において、各層の連続性をパラメータ表示する構成としてもよい。例えば、各層の有無に基づいて、連続性がある部位の割合(複数の層の内で所定の層がすべて存在する)、非連続性(複数の層の内で所定の層が一部存在しない)の部位の割合、全層欠損性(複数の層の内で所定の層が全て存在しない)の部位の割合を表示する。この割合に基づくパラメータ表示を行うようにしてもよい。もちろん、連続性、非連続性、欠損性、を段階的に表示する構成としてもよい。
【0077】
なお、本実施形態においては、眼底上の走査位置毎に判定処理を行う構成としたがこれに限定されない。三次元断層像を取得後に、断層像全体に対して判定処理を行う構成としてもよい。例えば、三次元断層像を取得後に、Voxel単位で画像解析を行い、各層面を検出し、判定処理を行ってもよい。
【0078】
なお、本実施形態において、所定領域において、解析が行われる構成としてもよい。例えば、中心窩を中心とするφ6mm領域において、解析マップが作成される構成としてもよい。これによって、解析領域が少なくてよいため、解析時間の短縮につながる。また、φ1mmやφ3mmの領域としてもよく、検者が任意に設定できる構成としてもよい。このとき、複数の領域にて解析結果を算出し、各解析結果と視力値と比較することによって、視力と解析領域との相関関係を確認することができる。さらに、視力との相関関係が現われやすい解析領域の解析結果と視力を同時に表示することで、層と視機能との関係を確認することができる。
【0079】
また、上記記載と同様にして、各解析結果と視機能(例えば、視感度、分解能、動体視力、QOV(Quality of vision)等)と比較することによって、視機能と解析領域との相関関係を確認することができる。そして、視機能との相関関係が現われやすい解析領域の解析結果と視機能を同時に表示することで、層と視機能との関係を確認することができる。視機能の表示方法としては、レーダチャートや棒グラフ表示等が挙げられる。
【0080】
なお、本実施形態においては、眼底撮影装置10としてOCTデバイスを用いる構成としたがこれに限定されない。本発明は、眼底画像を撮影可能な光学系を備えた装置に対して、適用可能である。例えば、所定の眼底撮影装置にて眼底画像を取得し、取得した眼底画像に解析結果を重畳処理し、表示する。眼底撮影装置は、レーザ光を眼底上で走査させる光スキャナを持ち、眼底の正面像を得るために被検眼眼底で反射した光束を受光する走査型眼底撮影光学系を備えたSLOが挙げられる。また、眼底カメラ等によって取得される眼底画像に対しても適用される。
【0081】
なお、本実施形態において、所定の層の統合処理を行う際に、各層の評価機能毎に重み付けをしてから統合処理を行ってもよい。例えば、視機能に大きく関係しているとされる層については、その層の解析パラメータの影響を大きく(割合を大きく)して、その他の層との合成処理を行う。
【0082】
なお、本実施形態において、特徴的な部位に関する各層の欠損状態を解析パラメータとして含めてもよい。例えば、中心窩部分に対応する層が欠損している場合には、視機能が機能しない可能性があることを表示するようにする。
【0083】
なお、本実施形態においては、三次元画像を解析する構成としたがこれに限定されない。例えば、所定のスキャン位置における断層像の加算平均画像を取得する。そして、ある横断方向に関する加算平均断層像(Bスキャン画像)において、層の有無を判定することによって、所定のスキャンラインにおける層の解析を行うことができる。
【0084】
なお、本発明は経過観察に適用することもできる。例えば、異なる日時で撮影した同一の被検眼の画像において、解析処理をそれぞれ行い、それらの解析処理結果を表示するようにしてもよい。表示方法としては、比較できる表示方法であればよい。例えば、撮影日時の異なる解析マップを並べて表示してもよいし、撮影日時の異なる解析パラメータをグラフにて表示するようにしてもよい。
【0085】
なお、本発明は、他装置の測定結果と比較するようにしてもよい。例えば、視野計のよる測定結果(視野データ)と比較することが挙げられる。この場合、取得した解析マップと視野計による測定結果の位置合わせを行い、重畳表示するようにする。これによって、層の存在と視力との関係を確認することができる。
【0086】
なお、本実施形態において、観察光学系200によって取得された眼底正面像に解析マップを重畳処理させる構成としてもよい。例えば、制御部70は、統合解析マップと層の存在量のパラメータを観察光学系200で取得された眼底正面像上に表示させる。この場合、制御部70は、眼底正面像に対し、統合解析マップを画像処理により重畳させ、統合解析マップと眼底正面像とを関連付ける。そして、制御部70は、統合解析マップと眼底正面像との重畳画像をモニタ75に表示する。このとき、制御部70は、眼底正面像と統合解析マップとを分離した状態で表示してもよい。なお、制御部70は、解析に用いた三次元断層像からOCT正面像を生成し、生成されたOCT正面像と解析マップとを関連付けさせることによって、pixel-to-pixelの関係で両データを対応付けできる。
【0087】
なお、本発明においては、本実施形態に記載した装置に限定されない。例えば、上記実施形態の機能を行う眼底解析ソフトウェア(プログラム)をネットワークや各種記憶媒体を介して、システムあるいは装置に供給する。そして、システムあるいは装置のコンピュータ(例えば、CPU等)がプログラムを読み出し、実行することも可能である。
【図面の簡単な説明】
【0088】
【図1】本実施形態に係る眼底解析装置の構成について説明するブロック図である。
【図2】本実施形態に係る眼底撮影装置の構成について説明する概略構成図である。
【図3】観察光学系によって取得された眼底正面像の例を示す図である。
【図4】OCT光学系によって得られた断層像とその輝度分布の例を示す図である。
【図5】解析モードの動作について説明するフローチャートを示している。
【図6】三次元断層像の解析によって取得されたELM、IS/OS、COSTそれぞれの解析マップと解析パラメータを示す図である。
【図7】ELM、IS/OS、COSTの解析マップを合成処理し作成した統合解析マップの一例を示す図である。
【符号の説明】
【0089】
1 眼底解析装置
10 眼底撮影装置(光コヒーレンストモグラフィーデバイス)
70 制御部
72 メモリ
75 モニタ
76 操作部
100 干渉光学系(OCT光学系)
108 光スキャナ
120 検出器
200 正面観察光学系
300 固視標投影ユニット
【特許請求の範囲】
【請求項1】
光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、
前記光コヒーレンストモグラフィーデバイスによって取得された前記断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、
を備えることを特徴とする眼底解析装置。
【請求項2】
前記解析手段は、判定結果に基づいて、網膜層の残存領域と欠損領域の分布状態を示す解析マップを作成する請求項1の眼底解析装置。
【請求項3】
前記解析手段は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する請求項1〜2のいずれかの眼底解析装置。
【請求項4】
前記解析手段は、前記断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する請求項1〜3のいずれかの眼底解析装置。
【請求項5】
前記解析手段は、前記判定結果に基づく解析パラメータを作成する請求項1〜4のいずれかの眼底解析装置。
【請求項6】
前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づくパラメータである請求項1〜5のいずれかの眼底解析装置。
【請求項7】
前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域の寸法情報、面積情報、体積情報の少なくともいずれか、又は所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づくパラメータである請求項1〜6のいずれかの眼底解析装置。
【請求項8】
前記解析手段による解析情報を出力する出力手段を備える請求項1〜7のいずれかの眼底解析装置。
【請求項9】
視機能に関連する網膜層は、ELM、IS/OS、COST、RPEのいずれかである請求項1〜8のいずれかの眼底解析装置。
【請求項10】
前記解析手段は、前記連続性の判定結果に基づく解析マップを作成し、該解析マップは、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップである請求項4の眼底解析装置。
【請求項11】
前記解析手段は、前記連続性の判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づくパラメータである請求項4の眼底解析装置。
【請求項12】
前記解析手段は、前記断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、前記視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成する請求項1〜11のいずれかの眼底解析装置。
【請求項13】
前記解析手段は、視機能に関連する網膜層の有無を二次元的に判定する請求項1〜12のいずれかの眼底解析装置。
【請求項14】
記憶手段に記憶された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析工程と、
前記解析工程による解析情報をモニタに出力する出力工程と、
をコンピュータに実行させる眼底解析プログラム。
【請求項1】
光源から発せられた光を眼底上で二次元的に走査する光スキャナと、光源から発せられた測定光と参照光との干渉状態を検出する検出器と、を有し、被検者眼眼底の断層像を得るための光コヒーレンストモグラフィーデバイスと、
前記光コヒーレンストモグラフィーデバイスによって取得された前記断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析手段と、
を備えることを特徴とする眼底解析装置。
【請求項2】
前記解析手段は、判定結果に基づいて、網膜層の残存領域と欠損領域の分布状態を示す解析マップを作成する請求項1の眼底解析装置。
【請求項3】
前記解析手段は、視機能に関連する複数の網膜層の有無を判定し、各網膜層の判定結果に基づく統合解析を行うことにより統合解析情報を作成する請求項1〜2のいずれかの眼底解析装置。
【請求項4】
前記解析手段は、前記断層像を処理して、視機能に関連する複数の網膜層間の連続性を判定し、その判定結果に基づいて解析情報を作成する請求項1〜3のいずれかの眼底解析装置。
【請求項5】
前記解析手段は、前記判定結果に基づく解析パラメータを作成する請求項1〜4のいずれかの眼底解析装置。
【請求項6】
前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域と欠損領域の少なくともいずれかの存在量に基づくパラメータである請求項1〜5のいずれかの眼底解析装置。
【請求項7】
前記解析手段は、前記判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における網膜層の残存領域の寸法情報、面積情報、体積情報の少なくともいずれか、又は所定の眼底領域における網膜層の欠損領域の寸法情報、面積情報、体積情報の少なくともいずれかに基づくパラメータである請求項1〜6のいずれかの眼底解析装置。
【請求項8】
前記解析手段による解析情報を出力する出力手段を備える請求項1〜7のいずれかの眼底解析装置。
【請求項9】
視機能に関連する網膜層は、ELM、IS/OS、COST、RPEのいずれかである請求項1〜8のいずれかの眼底解析装置。
【請求項10】
前記解析手段は、前記連続性の判定結果に基づく解析マップを作成し、該解析マップは、連続性を有する領域と連続性を有しない領域との分布状態を示す解析マップである請求項4の眼底解析装置。
【請求項11】
前記解析手段は、前記連続性の判定結果に基づく解析パラメータを作成し、該解析パラメータは、所定の眼底領域における連続性を有する領域と連続性を有しない領域のいずれかの存在量に基づくパラメータである請求項4の眼底解析装置。
【請求項12】
前記解析手段は、前記断層像を処理して信号伝達系に関連する網膜層の層厚を判定し、前記視機能に関連する網膜層の有無の判定結果と、信号伝達系に関連する網膜層の層厚の判定結果とを統合して、統合解析情報を作成する請求項1〜11のいずれかの眼底解析装置。
【請求項13】
前記解析手段は、視機能に関連する網膜層の有無を二次元的に判定する請求項1〜12のいずれかの眼底解析装置。
【請求項14】
記憶手段に記憶された断層像を処理して視機能に関連する網膜層の有無を判定し、判定結果に基づいて解析情報を作成する解析工程と、
前記解析工程による解析情報をモニタに出力する出力工程と、
をコンピュータに実行させる眼底解析プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−111421(P2013−111421A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263097(P2011−263097)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000135184)株式会社ニデック (745)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000135184)株式会社ニデック (745)
[ Back to top ]