
眼科装置横位置合わせシステム及びその方法
眼科装置に対して眼の最適位置を決定するシステム及び方法が開示される。方法の一実施例は、眼の表面の画像を有するデータを受信することを含む。眼の瞳孔に対して既知の関係にあるエッジ特徴は、画像の中で位置特定される。瞳孔を横方向に既定するために、エッジ特徴から画像のマップが作成され、瞳孔既定を用いて、瞳孔の中心が決定される。瞳孔の中心は、画像装置に対する眼の横位置を獲得するための位置を含んでいる。システムの実施例は、プロセッサと、プロセッサによって実行可能なソフトウェアパッケージを有し、ソフトウェアパッケージは、上記ステップを実行するように構成される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角膜(cornel)の波面測定及びレーザ補助角膜手術(laser-assisted cornel surgery)を実施するためのシステム及び方法に関し、特に、手術を受ける目の横方向の位置決めを最適化するためのシステム及び方法に関する。
【背景技術】
【0002】
波面導入屈折性のレーザ手術によって、角膜切除を行う技術は知られている。波面センサは、収差(aberration)マップ生成するために眼の収差を測定し、及び、固有のもの又は外的に適用される特徴になり得る身体構造上(anatomical)の目印に対してその位置を決定する。あるときは幾何学上の登録情報と共に、収差データは、切除を実行するために通常使用される処置エキシマレーザに直接転送される。
【0003】
眼科装置(ophthalmic device)において、測定又は削除装置を、治療上(therapeutically)有効にするように、眼から所定の距離に、そして、眼を正確に調整して位置合わせることは、極めて重要である。あるシステムでは、眼は、必ず中心にあり、オペレータと画像とのインタラクションのために焦点が明確に合っていなければならない。レーザビームが眼に対して既定の平面に焦点を合わせること、又は、例えばエキシマレーザシステムでは、眼の効果的なその後の計測、例えば波面測定のために、眼を位置合わせることも重要である。
【発明の開示】
【発明が解決しようとする課題】
【0004】
位置付けを支援する既知の技術では、角膜頂点(cornel apex)によって、赤外線ビーム光のような多数のビーム光の方向を変えるもの、及び、多数のビーム光の角膜上の投影であって、自動で又はオペレータにより眼の位置定めの精度を評価するようなものがある。眼が、治療上効果的な位置に無いと判断されるなら、そのとき、装置、及び/又は、頭/眼は、眼が最適に、又は、既定の許容範囲内に再配置するために動かされ得る。
【0005】
位置合わせ問題を解決するための最新の既知アプローチは、典型的には誤差を条件としたものであり、オペレータ及び/又は付加的なハードウェアによる介入を要求するものである。それゆえ、人間のオペレータ又は付加的なハードウェアを必要とせずに、眼の位置合わせにおける精度を改善し且つ自動化するシステム及び方法を提供することが有効である。
【課題を解決するための手段】
【0006】
本発明は、眼科装置に対して眼の横位置を決定するシステム及び方法に向けられる。最適な横位置は、眼科装置が目的として望まれる状態で治療上有効になるように、眼を配置する位置である。最適な横位置は、治療上有効な範囲のために望まれる眼科装置においていかなる場所であることはもちろん、その設計許容値の制限に対して眼科装置が実行できるように、眼を位置合わせることも含む。
本発明の方法の実施例は、眼の表面の画像を有するデータを受信するステップを含む。眼の瞳孔に対して既知の関係にあるエッジ特徴は、画像の中で位置特定される。瞳孔を横方向に既定するために、エッジ特徴から画像のマップが作成され、瞳孔既定を用いて、瞳孔の中心が決定される。瞳孔の中心は、画像装置に対する眼の横位置を獲得するための位置を含んでいる。
【0007】
本発明に係るシステムの実施例は、プロセッサと、プロセッサによって実行可能なソフトウェアパッケージを有する。ソフトウェアパッケージは、上記ステップを実行するように構成される。
【0008】
本発明のシステム及び方法の実施例は、眼科装置が既に眼の表面を撮像し且つ画像を捕捉する手段を有するなら、付加的なハードウェアを必要としないという利点がある。付加的エレメントは、最適なセンタリング及び焦点位置を計算し、且つ、自動位置合わせ機能の存在に従って、眼科装置位置を動かすか又は必要となる眼科装置の動きを示すかのどちらかのためのソフトウェアパッケージを有することができる。
【0009】
本発明を特徴付ける特性は、機構及び操作方法の両方、さらなる目的及びその効果と共に、添付図と共に使用される次の記述からより良く理解されるだろう。図面は、説明及び記述の目的のためであり、本発明を制限する定義として意図されてはいないことが明確に理解されるだろう。本発明によって達成されるこれら及び他の目的、提示される効果は、次の記述を添付図と共に読むことで十分に明確になるだろう。
【発明を実施するための最良の形態】
【0010】
本発明のより完全な理解及び本発明の効果は、同種の特徴を示す同種の参照符号を含む添付図を併用して、次の記述を参照することによって獲得し得る。
【0011】
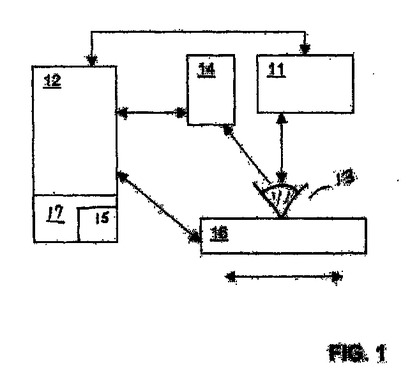
本発明の好ましい実施例の記述は、これから、図1〜4を参照して表される。眼の位置定めシステム10の典型的な実施例は、図1において概略的に描かれ、図2A及び2Bにおいて典型的な方法100が描かれる。
【0012】
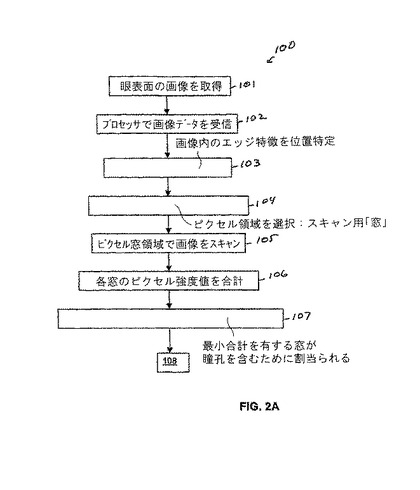
眼科装置11に対して眼13の最適な位置を決定する方法の実施例100は、プロセッサ12の中でデータを受信するステップ(ブロック102)を有する。データは、例えば、ビデオカメラ、デジタルカメラ、スチールカメラ、又は、プロセッサ12と通信するフレーム取得手段14で収集された眼13の表面の画像を含む(ブロック101)。その画像は、眼科装置11に対して第1位置にある眼で収集され(ブロック101)、典型的には、各々がそれに関係する強度値を有する多数のピクセルを有する。眼科装置11は、例えば、制限無く、フェムト秒レーザ・マイクロケラトーム、エキシマレーザのような処置レーザ、誤差測定器(aberrometer)、眼の正確な横方向の位置合わせに当業者によって知られる既知の他の眼科装置である。
【0013】
(ここではプロセッサ12の一部として表される)メモリ17の中に在住され得るソフトウェアパッケージ15は、画像の中のエッジ特徴(edge feature)を位置特定するためのコードセグメントを含む(ブロック103)。メモリ17は、プロセッサ12に操作的に連結された別個のメモリでも良く、又は、プロセッサ12と一体部分であり得る。エッジ特徴は、制限する意図は無いが、瞳孔の特徴又は虹彩(iris)の特徴を含む。
【0014】
プロセッサ12(制御回路)は、単一の処理装置又は複数の処理装置であっても良い。そのような処理装置は、マイクロプロセッサ、マイクロコントローラ、デジタルシグナルプロセッサ、マイクロコンピュータ、中央処理ユニット、フィールドプログラマブルゲートウェイ、プログラマブルロジックデバイス、状態機械、論理回路、アナログ回路、デジタル回路、及び/又は操作指令に基づく(アナログ及び/又はデジタル)信号を操作するいかなる装置であっても良い。プロセッサ12に連結されたメモリ17、又は、制御回路は、単一の記憶装置又は複数の記憶装置であっても良い。そのような記憶装置は、リードオンリーメモリ、ランダムアクセスメモリ、揮発性メモリ、非揮発性メモリ、スタティックメモリ、ダイナミックメモリ、フラッシュメモリ、キャッシュメモリ、及び/又はデジタル情報を記憶するいかなる装置であっても良い。マイクロプロセッサ又は制御回路が、状態機械、アナログ回路、デジタル回路、及び/又は論理回路を介して1つ以上の機能を実装するとき、対応する操作指令を記憶するメモリは、状態機械、アナログ回路、デジタル回路、及び/又は論理回路を含む回路の中、又は、外部に組み込まれることに留意すべきである。メモリは、図2A及び2Bに関係して説明及び記述されるステップ及び/又は機能の少なくとも幾らかに対応する操作指令(例えば、ソフトウェアパッケージ15)を記憶し、マイクロプロセッサ又は制御回路は、その操作指令を実行する。
【0015】
画像は、例えば、画像の中の最暗領域を位置特定するためにエッジ特徴からスキャンすることによって、瞳孔を横方向に既定するために、エッジ特徴から画像のマップを作成する。これは、矩形エリア、又は、画像のサイズより十分に小さいが、複数のピクセルを含むために十分に大きい既定サイズを有する「窓」を設定することによって典型的な方法で達成される(ブロック104)。この矩形エリアは、画像全体が十分にスキャンされるまで、全ての列をスキャンしながら、画像を横断する「スライド(slid)」である(ブロック105)。矩形エリアの各々のために、そのエリア内の各ピクセルの強度は合計され(ブロック106)、画像内の複数の領域の各々のための強度値が得られる。最も小さな強度値を有する領域は、最暗領域を含み、瞳孔の少なくとも部分を含むように割り当てられる(ブロック107)。
【0016】
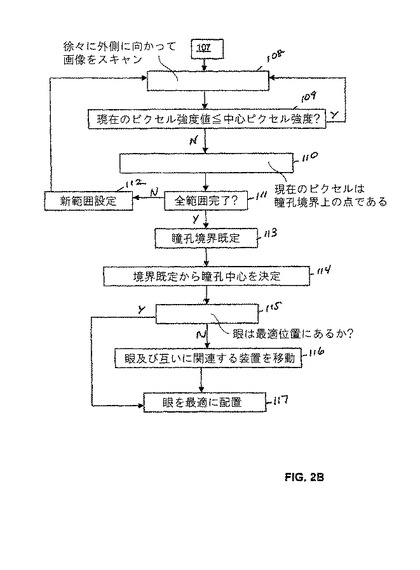
次に、画像は、最暗領域の中心ピクセルから放射状に外側にスキャンされる(ブロック108)。各々の次のピクセルの強度値は、中心ピクセルの強度値と比較される(ブロック109)。現状の検査されたピクセルの強度値が、中心ピクセルの強度値と同じかそれより小さくなる場合、プログラムは次の放射状の放射状外側のピクセルに続く(ブロック108)。現状の検査されたピクセルの強度値が、中心ピクセルの強度値より大きくなる場合、現状のピクセルは瞳孔境界上の点を既定すると見なされる(ブロック110)。
【0017】
この手続きは、瞳孔境界を集団で既定する瞳孔境界点(ブロック113)とともに、異なる放射線に沿って(ブロック112)既定回数繰り返される(ブロック111)。図3に説明されるように、それから、瞳孔の中心は、境界点から決定される(ブロック114)。瞳孔中心は、眼科装置11に対する眼の最適な横位置を得るための位置を含む。最適な横位置は、眼科装置11が目的のために望まれる状態で治療上有効になるように、眼を配置する位置であり得る。最適な横方向の位置合わせは、治療上有効な範囲のために望まれる眼科装置においていかなる場所であることはもちろん、その設計許容値の制限に対して眼科装置11が実行できるように、眼を位置合わせることも含み得る。最適な横位置は、眼科装置に対する眼の望ましい横位置になり得る。
【0018】
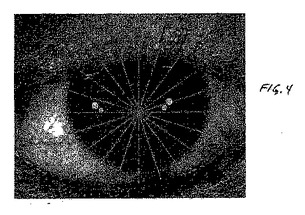
眼が最適な横位置以外の位置にある場合(ブロック115)、決定された眼の中央及び対象とする眼科装置11の運転状況から決定されるように、眼及び眼科装置11は、眼を最適な横位置に配置するために(ブロック117)、図4で図解されるように、相対的に再配置される(ブロック116)。そのような再配置は、ソフトウェア15及びプロセッサ12の制御下で、位置合わせ装置16のような、本発明の範囲内で意図され且つ当業者によって知られた手段によって、手動又は自動でもたらされる。例えば、制限するものではないが、患者は手動で位置合わせられ、眼科装置11は手動で位置合わせられ、及び/又は、眼科装置11又は患者が支えられる机/椅子(例えば、位置合わせ装置16)は、機械的及び電気的制御システム、及びこれら方法の組合せによって自動で位置合わせられ得る。いったん眼が所望の位置にあると、必要な処置が眼科装置11を用いて眼13に対して実行される。このように、この発明の実施例は、瞳孔中心参照点を提供し、そこから、眼及び処置眼科装置11の最適位置が決定される。
【0019】
上述においては、ある特定の用語が簡潔さ、明確さ、及び理解のために使用されたが、そのような言葉はここでは記述目的のために使用され、広く解釈されることを意図したのであるので、不必要な制限が、従来技術の要求を超えてそれらから意味されることは無い。さらに、ここで説明され記述された装置の実施例は、例示の目的であり、実際の詳細な構成を抽出するために、本発明の範囲を制限するものではない。
【図面の簡単な説明】
【0020】
【図1】図1は、本発明に係る眼の横位置合わせシステムの一実施例の概念図である。
【図2A】図2Aは、本発明に係る方法の典型的実施例のフローチャートである。
【図2B】図2Bは、本発明に係る方法の典型的実施例のフローチャートである。
【図3】図3は、中心から外れた瞳孔を有する眼の画像を示す図である。
【図4】図4は、本発明に係る中心に寄せられた瞳孔を有する眼の画像を示す図である。
【技術分野】
【0001】
本発明は、角膜(cornel)の波面測定及びレーザ補助角膜手術(laser-assisted cornel surgery)を実施するためのシステム及び方法に関し、特に、手術を受ける目の横方向の位置決めを最適化するためのシステム及び方法に関する。
【背景技術】
【0002】
波面導入屈折性のレーザ手術によって、角膜切除を行う技術は知られている。波面センサは、収差(aberration)マップ生成するために眼の収差を測定し、及び、固有のもの又は外的に適用される特徴になり得る身体構造上(anatomical)の目印に対してその位置を決定する。あるときは幾何学上の登録情報と共に、収差データは、切除を実行するために通常使用される処置エキシマレーザに直接転送される。
【0003】
眼科装置(ophthalmic device)において、測定又は削除装置を、治療上(therapeutically)有効にするように、眼から所定の距離に、そして、眼を正確に調整して位置合わせることは、極めて重要である。あるシステムでは、眼は、必ず中心にあり、オペレータと画像とのインタラクションのために焦点が明確に合っていなければならない。レーザビームが眼に対して既定の平面に焦点を合わせること、又は、例えばエキシマレーザシステムでは、眼の効果的なその後の計測、例えば波面測定のために、眼を位置合わせることも重要である。
【発明の開示】
【発明が解決しようとする課題】
【0004】
位置付けを支援する既知の技術では、角膜頂点(cornel apex)によって、赤外線ビーム光のような多数のビーム光の方向を変えるもの、及び、多数のビーム光の角膜上の投影であって、自動で又はオペレータにより眼の位置定めの精度を評価するようなものがある。眼が、治療上効果的な位置に無いと判断されるなら、そのとき、装置、及び/又は、頭/眼は、眼が最適に、又は、既定の許容範囲内に再配置するために動かされ得る。
【0005】
位置合わせ問題を解決するための最新の既知アプローチは、典型的には誤差を条件としたものであり、オペレータ及び/又は付加的なハードウェアによる介入を要求するものである。それゆえ、人間のオペレータ又は付加的なハードウェアを必要とせずに、眼の位置合わせにおける精度を改善し且つ自動化するシステム及び方法を提供することが有効である。
【課題を解決するための手段】
【0006】
本発明は、眼科装置に対して眼の横位置を決定するシステム及び方法に向けられる。最適な横位置は、眼科装置が目的として望まれる状態で治療上有効になるように、眼を配置する位置である。最適な横位置は、治療上有効な範囲のために望まれる眼科装置においていかなる場所であることはもちろん、その設計許容値の制限に対して眼科装置が実行できるように、眼を位置合わせることも含む。
本発明の方法の実施例は、眼の表面の画像を有するデータを受信するステップを含む。眼の瞳孔に対して既知の関係にあるエッジ特徴は、画像の中で位置特定される。瞳孔を横方向に既定するために、エッジ特徴から画像のマップが作成され、瞳孔既定を用いて、瞳孔の中心が決定される。瞳孔の中心は、画像装置に対する眼の横位置を獲得するための位置を含んでいる。
【0007】
本発明に係るシステムの実施例は、プロセッサと、プロセッサによって実行可能なソフトウェアパッケージを有する。ソフトウェアパッケージは、上記ステップを実行するように構成される。
【0008】
本発明のシステム及び方法の実施例は、眼科装置が既に眼の表面を撮像し且つ画像を捕捉する手段を有するなら、付加的なハードウェアを必要としないという利点がある。付加的エレメントは、最適なセンタリング及び焦点位置を計算し、且つ、自動位置合わせ機能の存在に従って、眼科装置位置を動かすか又は必要となる眼科装置の動きを示すかのどちらかのためのソフトウェアパッケージを有することができる。
【0009】
本発明を特徴付ける特性は、機構及び操作方法の両方、さらなる目的及びその効果と共に、添付図と共に使用される次の記述からより良く理解されるだろう。図面は、説明及び記述の目的のためであり、本発明を制限する定義として意図されてはいないことが明確に理解されるだろう。本発明によって達成されるこれら及び他の目的、提示される効果は、次の記述を添付図と共に読むことで十分に明確になるだろう。
【発明を実施するための最良の形態】
【0010】
本発明のより完全な理解及び本発明の効果は、同種の特徴を示す同種の参照符号を含む添付図を併用して、次の記述を参照することによって獲得し得る。
【0011】
本発明の好ましい実施例の記述は、これから、図1〜4を参照して表される。眼の位置定めシステム10の典型的な実施例は、図1において概略的に描かれ、図2A及び2Bにおいて典型的な方法100が描かれる。
【0012】
眼科装置11に対して眼13の最適な位置を決定する方法の実施例100は、プロセッサ12の中でデータを受信するステップ(ブロック102)を有する。データは、例えば、ビデオカメラ、デジタルカメラ、スチールカメラ、又は、プロセッサ12と通信するフレーム取得手段14で収集された眼13の表面の画像を含む(ブロック101)。その画像は、眼科装置11に対して第1位置にある眼で収集され(ブロック101)、典型的には、各々がそれに関係する強度値を有する多数のピクセルを有する。眼科装置11は、例えば、制限無く、フェムト秒レーザ・マイクロケラトーム、エキシマレーザのような処置レーザ、誤差測定器(aberrometer)、眼の正確な横方向の位置合わせに当業者によって知られる既知の他の眼科装置である。
【0013】
(ここではプロセッサ12の一部として表される)メモリ17の中に在住され得るソフトウェアパッケージ15は、画像の中のエッジ特徴(edge feature)を位置特定するためのコードセグメントを含む(ブロック103)。メモリ17は、プロセッサ12に操作的に連結された別個のメモリでも良く、又は、プロセッサ12と一体部分であり得る。エッジ特徴は、制限する意図は無いが、瞳孔の特徴又は虹彩(iris)の特徴を含む。
【0014】
プロセッサ12(制御回路)は、単一の処理装置又は複数の処理装置であっても良い。そのような処理装置は、マイクロプロセッサ、マイクロコントローラ、デジタルシグナルプロセッサ、マイクロコンピュータ、中央処理ユニット、フィールドプログラマブルゲートウェイ、プログラマブルロジックデバイス、状態機械、論理回路、アナログ回路、デジタル回路、及び/又は操作指令に基づく(アナログ及び/又はデジタル)信号を操作するいかなる装置であっても良い。プロセッサ12に連結されたメモリ17、又は、制御回路は、単一の記憶装置又は複数の記憶装置であっても良い。そのような記憶装置は、リードオンリーメモリ、ランダムアクセスメモリ、揮発性メモリ、非揮発性メモリ、スタティックメモリ、ダイナミックメモリ、フラッシュメモリ、キャッシュメモリ、及び/又はデジタル情報を記憶するいかなる装置であっても良い。マイクロプロセッサ又は制御回路が、状態機械、アナログ回路、デジタル回路、及び/又は論理回路を介して1つ以上の機能を実装するとき、対応する操作指令を記憶するメモリは、状態機械、アナログ回路、デジタル回路、及び/又は論理回路を含む回路の中、又は、外部に組み込まれることに留意すべきである。メモリは、図2A及び2Bに関係して説明及び記述されるステップ及び/又は機能の少なくとも幾らかに対応する操作指令(例えば、ソフトウェアパッケージ15)を記憶し、マイクロプロセッサ又は制御回路は、その操作指令を実行する。
【0015】
画像は、例えば、画像の中の最暗領域を位置特定するためにエッジ特徴からスキャンすることによって、瞳孔を横方向に既定するために、エッジ特徴から画像のマップを作成する。これは、矩形エリア、又は、画像のサイズより十分に小さいが、複数のピクセルを含むために十分に大きい既定サイズを有する「窓」を設定することによって典型的な方法で達成される(ブロック104)。この矩形エリアは、画像全体が十分にスキャンされるまで、全ての列をスキャンしながら、画像を横断する「スライド(slid)」である(ブロック105)。矩形エリアの各々のために、そのエリア内の各ピクセルの強度は合計され(ブロック106)、画像内の複数の領域の各々のための強度値が得られる。最も小さな強度値を有する領域は、最暗領域を含み、瞳孔の少なくとも部分を含むように割り当てられる(ブロック107)。
【0016】
次に、画像は、最暗領域の中心ピクセルから放射状に外側にスキャンされる(ブロック108)。各々の次のピクセルの強度値は、中心ピクセルの強度値と比較される(ブロック109)。現状の検査されたピクセルの強度値が、中心ピクセルの強度値と同じかそれより小さくなる場合、プログラムは次の放射状の放射状外側のピクセルに続く(ブロック108)。現状の検査されたピクセルの強度値が、中心ピクセルの強度値より大きくなる場合、現状のピクセルは瞳孔境界上の点を既定すると見なされる(ブロック110)。
【0017】
この手続きは、瞳孔境界を集団で既定する瞳孔境界点(ブロック113)とともに、異なる放射線に沿って(ブロック112)既定回数繰り返される(ブロック111)。図3に説明されるように、それから、瞳孔の中心は、境界点から決定される(ブロック114)。瞳孔中心は、眼科装置11に対する眼の最適な横位置を得るための位置を含む。最適な横位置は、眼科装置11が目的のために望まれる状態で治療上有効になるように、眼を配置する位置であり得る。最適な横方向の位置合わせは、治療上有効な範囲のために望まれる眼科装置においていかなる場所であることはもちろん、その設計許容値の制限に対して眼科装置11が実行できるように、眼を位置合わせることも含み得る。最適な横位置は、眼科装置に対する眼の望ましい横位置になり得る。
【0018】
眼が最適な横位置以外の位置にある場合(ブロック115)、決定された眼の中央及び対象とする眼科装置11の運転状況から決定されるように、眼及び眼科装置11は、眼を最適な横位置に配置するために(ブロック117)、図4で図解されるように、相対的に再配置される(ブロック116)。そのような再配置は、ソフトウェア15及びプロセッサ12の制御下で、位置合わせ装置16のような、本発明の範囲内で意図され且つ当業者によって知られた手段によって、手動又は自動でもたらされる。例えば、制限するものではないが、患者は手動で位置合わせられ、眼科装置11は手動で位置合わせられ、及び/又は、眼科装置11又は患者が支えられる机/椅子(例えば、位置合わせ装置16)は、機械的及び電気的制御システム、及びこれら方法の組合せによって自動で位置合わせられ得る。いったん眼が所望の位置にあると、必要な処置が眼科装置11を用いて眼13に対して実行される。このように、この発明の実施例は、瞳孔中心参照点を提供し、そこから、眼及び処置眼科装置11の最適位置が決定される。
【0019】
上述においては、ある特定の用語が簡潔さ、明確さ、及び理解のために使用されたが、そのような言葉はここでは記述目的のために使用され、広く解釈されることを意図したのであるので、不必要な制限が、従来技術の要求を超えてそれらから意味されることは無い。さらに、ここで説明され記述された装置の実施例は、例示の目的であり、実際の詳細な構成を抽出するために、本発明の範囲を制限するものではない。
【図面の簡単な説明】
【0020】
【図1】図1は、本発明に係る眼の横位置合わせシステムの一実施例の概念図である。
【図2A】図2Aは、本発明に係る方法の典型的実施例のフローチャートである。
【図2B】図2Bは、本発明に係る方法の典型的実施例のフローチャートである。
【図3】図3は、中心から外れた瞳孔を有する眼の画像を示す図である。
【図4】図4は、本発明に係る中心に寄せられた瞳孔を有する眼の画像を示す図である。
【特許請求の範囲】
【請求項1】
眼科装置に対する眼の好適な横位置を決定する方法であって、
眼の表面の画像を有するデータを受信するステップと、
前記眼の瞳孔に対して既知の関係にあるエッジ特徴を、前記画像の中で位置特定するステップと、
前記瞳孔を横方向に既定するために、前記エッジ特徴から前記画像のマップを作成するステップと、
前記既定した瞳孔のマップを用いて、画像装置に対する眼の好適な横位置を獲得するための位置を含む前記瞳孔の中心を決定するステップと、
を有する方法。
【請求項2】
前記エッジ特徴は、強膜血管及び虹彩からなるグループから選択される請求項1に記載の方法。
【請求項3】
前記マップ作成ステップは、前記画像の中の最暗領域を位置特定するために前記エッジ特徴からスキャンし、且つ、前記最暗領域の境界を既定することを含み、
前記瞳孔中心決定ステップは、前記最暗領域の幾何学的中心を計算することを含む請求項1に記載の方法。
【請求項4】
前記スキャンステップは、前記画像内の多数の領域の各々のために強度値を計算することを含み、前記各領域は、前記画像のサイズより著しく小さい既定のサイズを有し、最小強度値を有する領域は、最暗領域を含み且つ前記瞳孔の少なくとも部分を含むように割り当てられる請求項3に記載の方法。
【請求項5】
前記画像は、複数のピクセルを有し、前記領域サイズは複数のピクセルを含むために著しく大きい請求項4に記載の方法。
【請求項6】
第1強度を有し且つ前記最暗領域にある中心のピクセルから放射状に外側に前記画像をスキャンするステップ、及び、前記第1強度より大きい第2強度を有する外側スキャンにおける前記中心ピクセルに最も近いピクセルを決定するステップをさらに有する請求項5に記載の方法。
【請求項7】
瞳孔境界を既定するために、多数の異なる放射状範囲に沿って前記放射状スキャンステップ及び前記ピクセル決定ステップを繰り返す請求項6に記載の方法。
【請求項8】
前記眼が前記好適な横位置と異なる位置にある場合、前記好適な横位置に前記眼を配置するために前記眼及び前記眼科装置を相対的に再度位置合わせするステップをさらに有する請求項1に記載の方法。
【請求項9】
眼科装置に対する眼の好適な横位置を決定するシステムであって、
プロセッサと、
前記プロセッサにインストール可能なソフトウェアパッケージであって、
眼科装置に対して第1位置にある眼の表面の画像を有するデータを、前記プロセッサを介して受信し、
前記眼の瞳孔に対して既知の関係にあるエッジ特徴を、前記画像の中で位置特定し、
前記瞳孔を横方向に既定するために、前記エッジ特徴から前記画像のマップを作成し、
前記既定した瞳孔のマップを用いて、画像装置に対する眼の好適な横位置を獲得するための位置を含む前記瞳孔の中心を決定するように構成されるソフトウェアパッケージと、
を有するシステム。
【請求項10】
前記エッジ特徴は、強膜血管及び虹彩からなるグループから選択される請求項1に記載のシステム。
【請求項11】
前記ソフトウェアパッケージは、前記画像の中の最暗領域を位置特定するために前記エッジ特徴からスキャンすることによって画像のマップ作成を達成し、且つ、前記最暗領域の幾何学的中心を計算することによって前記瞳孔中心の決定を達成するように構成される請求項9に記載のシステム。
【請求項12】
前記ソフトウェアパッケージは、前記画像内の多数の領域の各々のために強度値を計算するように構成され、前記各領域は、前記画像のサイズより著しく小さい既定のサイズを有し、最小強度値を有する領域は、最暗領域を含み且つ前記瞳孔の少なくとも部分を含むように割り当てられる請求項11に記載のシステム。
【請求項13】
前記画像は、複数のピクセルを有し、前記領域サイズは複数のピクセルを含むために著しく大きい請求項12に記載のシステム。
【請求項14】
前記ソフトウェアパッケージは、第1強度を有し且つ前記最暗領域にある中心のピクセルから放射状に外側に前記画像をスキャンし、且つ、前記第1強度より大きい第2強度を有する外側スキャンにおける前記中心ピクセルに最も近いピクセルを決定するステップをように構成される請求項14に記載のシステム。
【請求項15】
前記ソフトウェアパッケージは、瞳孔境界を既定するために、多数の異なる放射状範囲に沿って前記放射状スキャン及び前記ピクセル決定を繰り返すようにさらに構成される請求項14に記載のシステム。
【請求項16】
前記眼が前記好適な横位置と異なる位置にある場合、前記好適な横位置に前記眼を配置するために前記眼及び前記眼科装置を相対的に再度位置合わせする手段をさらに有する請求項15に記載のシステム。
【請求項1】
眼科装置に対する眼の好適な横位置を決定する方法であって、
眼の表面の画像を有するデータを受信するステップと、
前記眼の瞳孔に対して既知の関係にあるエッジ特徴を、前記画像の中で位置特定するステップと、
前記瞳孔を横方向に既定するために、前記エッジ特徴から前記画像のマップを作成するステップと、
前記既定した瞳孔のマップを用いて、画像装置に対する眼の好適な横位置を獲得するための位置を含む前記瞳孔の中心を決定するステップと、
を有する方法。
【請求項2】
前記エッジ特徴は、強膜血管及び虹彩からなるグループから選択される請求項1に記載の方法。
【請求項3】
前記マップ作成ステップは、前記画像の中の最暗領域を位置特定するために前記エッジ特徴からスキャンし、且つ、前記最暗領域の境界を既定することを含み、
前記瞳孔中心決定ステップは、前記最暗領域の幾何学的中心を計算することを含む請求項1に記載の方法。
【請求項4】
前記スキャンステップは、前記画像内の多数の領域の各々のために強度値を計算することを含み、前記各領域は、前記画像のサイズより著しく小さい既定のサイズを有し、最小強度値を有する領域は、最暗領域を含み且つ前記瞳孔の少なくとも部分を含むように割り当てられる請求項3に記載の方法。
【請求項5】
前記画像は、複数のピクセルを有し、前記領域サイズは複数のピクセルを含むために著しく大きい請求項4に記載の方法。
【請求項6】
第1強度を有し且つ前記最暗領域にある中心のピクセルから放射状に外側に前記画像をスキャンするステップ、及び、前記第1強度より大きい第2強度を有する外側スキャンにおける前記中心ピクセルに最も近いピクセルを決定するステップをさらに有する請求項5に記載の方法。
【請求項7】
瞳孔境界を既定するために、多数の異なる放射状範囲に沿って前記放射状スキャンステップ及び前記ピクセル決定ステップを繰り返す請求項6に記載の方法。
【請求項8】
前記眼が前記好適な横位置と異なる位置にある場合、前記好適な横位置に前記眼を配置するために前記眼及び前記眼科装置を相対的に再度位置合わせするステップをさらに有する請求項1に記載の方法。
【請求項9】
眼科装置に対する眼の好適な横位置を決定するシステムであって、
プロセッサと、
前記プロセッサにインストール可能なソフトウェアパッケージであって、
眼科装置に対して第1位置にある眼の表面の画像を有するデータを、前記プロセッサを介して受信し、
前記眼の瞳孔に対して既知の関係にあるエッジ特徴を、前記画像の中で位置特定し、
前記瞳孔を横方向に既定するために、前記エッジ特徴から前記画像のマップを作成し、
前記既定した瞳孔のマップを用いて、画像装置に対する眼の好適な横位置を獲得するための位置を含む前記瞳孔の中心を決定するように構成されるソフトウェアパッケージと、
を有するシステム。
【請求項10】
前記エッジ特徴は、強膜血管及び虹彩からなるグループから選択される請求項1に記載のシステム。
【請求項11】
前記ソフトウェアパッケージは、前記画像の中の最暗領域を位置特定するために前記エッジ特徴からスキャンすることによって画像のマップ作成を達成し、且つ、前記最暗領域の幾何学的中心を計算することによって前記瞳孔中心の決定を達成するように構成される請求項9に記載のシステム。
【請求項12】
前記ソフトウェアパッケージは、前記画像内の多数の領域の各々のために強度値を計算するように構成され、前記各領域は、前記画像のサイズより著しく小さい既定のサイズを有し、最小強度値を有する領域は、最暗領域を含み且つ前記瞳孔の少なくとも部分を含むように割り当てられる請求項11に記載のシステム。
【請求項13】
前記画像は、複数のピクセルを有し、前記領域サイズは複数のピクセルを含むために著しく大きい請求項12に記載のシステム。
【請求項14】
前記ソフトウェアパッケージは、第1強度を有し且つ前記最暗領域にある中心のピクセルから放射状に外側に前記画像をスキャンし、且つ、前記第1強度より大きい第2強度を有する外側スキャンにおける前記中心ピクセルに最も近いピクセルを決定するステップをように構成される請求項14に記載のシステム。
【請求項15】
前記ソフトウェアパッケージは、瞳孔境界を既定するために、多数の異なる放射状範囲に沿って前記放射状スキャン及び前記ピクセル決定を繰り返すようにさらに構成される請求項14に記載のシステム。
【請求項16】
前記眼が前記好適な横位置と異なる位置にある場合、前記好適な横位置に前記眼を配置するために前記眼及び前記眼科装置を相対的に再度位置合わせする手段をさらに有する請求項15に記載のシステム。
【図1】

【図2A】
【図2B】
【図3】
【図4】
【図2A】
【図2B】
【図3】
【図4】
【公表番号】特表2009−502341(P2009−502341A)
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願番号】特願2008−524088(P2008−524088)
【出願日】平成18年7月26日(2006.7.26)
【国際出願番号】PCT/US2006/028936
【国際公開番号】WO2007/016132
【国際公開日】平成19年2月8日(2007.2.8)
【出願人】(504230051)アルコン リフラクティブホライズンズ,インコーポレイティド (12)
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願日】平成18年7月26日(2006.7.26)
【国際出願番号】PCT/US2006/028936
【国際公開番号】WO2007/016132
【国際公開日】平成19年2月8日(2007.2.8)
【出願人】(504230051)アルコン リフラクティブホライズンズ,インコーポレイティド (12)
[ Back to top ]