
眼鏡用補正レンズの向きを決定する装置若しくは方法及び補正レンズを製造する光学的方法
本発明は、装着状態において、将来眼鏡をかける人の頭に対する眼鏡補正レンズの向きの少なくとも1つの成分を決定する装置と方法に関する。少なくとも1つの既知の幾何学的特性を有する少なくとも1つの同定要素(60、70、80)を具備する、位置同定システム(20)をフレーム(10)上に又はフレームに嵌め込んだレンズ上に取付け、垂直顔面平面内で同定要素の2次元像を撮影し、この撮影画像を処理して、同定要素の既知の幾何学的特性に依存するこの像の同定要素の幾何学的特性を計測し、そして、既知の幾何学的特性と撮影された幾何学的特性とを比較して、レンズの向きの少なくとも1つの成分を計算するものである。本発明は、補正レンズを光学的に設計製造する方法にも関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、将来眼鏡をかける人が選択したフレームに装着する個人用の補正レンズの光学的製造を目的にして、将来眼鏡をかける人の幾何学的形態学的(geometrico-morphological)に計測に関し、より具体的には、眼鏡をかけた状態において眼鏡用の補正レンズの将来眼鏡をかける人の頭に対する少なくともひとつの向きの成分を決定する装置及び方法にも関する。
【背景技術】
【0002】
眼鏡補正レンズの光学的な設計製造において、選択したフレームで眼鏡をかける人に合った個人専用の光学設計をするに際して使用される個々専用の幾何学的形態学的パラメータを可能な限り最適な計測することが現在望まれている。このようなパラメータは、具体的には、眼鏡装着時に眼鏡をかける人の頭に対するレンズの3次元な配置情報を含んでいる。このような3次元な配置情報は、(1)眼鏡をかける人の対応する眼に対するレンズの向き、及び、(2)レンズと眼鏡をかける人(眼鏡装着者)の対応する眼の間の距離、によって決定されている。
【0003】
補正レンズの装着時の三次元的な向きを決定するために、フレームのフレームを包み込む曲がりに全体として対応する水平面内の第一角を計測して、レンズが垂直面と共に形成する所謂“装用時前傾角(pantoscopic angle)”にほぼ対応する、垂直面内の第二角を計測することが知られている。
【0004】
そのような計測を行うために、フレームが選択された後、眼鏡技師は眼鏡をかける人の鼻に眼鏡をかける。眼鏡は眼鏡をかける人によって選択されたフレームとフレームのリムに装着された補正していないレンズからなっている。
【0005】
各々のレンズと眼鏡をかける人のレンズに対応する眼との間の距離を計測するために、眼鏡技師は、眼鏡をかける人のプロファイルを観察して、計測値を透けて見える物差しを使用して手動で評価する。同様に、装用時前傾角を計測するために、眼鏡技師は、目盛が振られた分度器を使用して手動で計測値を評価して、レンズの主面と垂直面との間の角度を決定できる。
【0006】
フレームの各々のリムの内側の輪郭から読み取れるように特別に製造された装置を使用して、フレームのフレームを包み込む曲がり角は計測することができる。しかしながら、このようなフレームを計測する装置は高価であり、また、使用が複雑である。この角(角度)をより簡便に計測するために、フレームのアームとリムを分度器のように目盛りを付されたプレートの上に置く方法が知られている。この目盛りによって近似的に水平面内に形成される、ノーズブリッジにほぼ接する(結果的に、フレームの垂直対称面に垂直な)レファレンスの水平線にレンズをトレースすることによって角度を計測して評価することができる。
【0007】
眼鏡技師は、眼鏡をかける人の形態に関係する、この他に2つのパラメータ、すなわち、2つの瞳孔間距離(pupillary distance)あるいは2つの瞳孔間の半分の距離(瞳孔間半距離(two pupillary halfdistance))、及び、フレームに対する高さ、も計測する。2つの瞳孔間の距離、あるいは、2つの瞳孔間の半分の距離を計測するため、定規(物差)を使用することが最も普通に行われている。瞳孔計として知られている特別な装置を使用することもできる。フレームに対する瞳孔の高さを計測するために、眼鏡技師は、通常、レンズの前面に配置された物差を使用してフレーム上のレファレンス点で瞳孔の位置の間の距離を計測する。
【0008】
このように、上述の幾何学的形態学的なパラメータの計測では多くの異なる道具を使用する必要がある。そのため、眼鏡技師は、眼鏡技師にも眼鏡をかける人にも厄介であって費用が掛かることとなる多くの操作をする必要がある。多くの操作は誤操作の原因となり、少なくとも、計測精度を低めることとなる。フレームの上に置く定規あるいは分度器を使用して計測値を手動でかつ近似的に読み取ることによって、しばしば計測精度を低めることとなる。
【0009】
曲がり角あるいは装用時前傾角から各々の補正レンズの向きを決定することは信頼性にかけることも知られている。特に、これら2つの角度にしたがった回転を組合せてレンズの向きを決定すると、この組合せの程度によってレンズの向きに影響することとなる。
【発明の概要】
【0010】
本発明の目的は、フレームに装着される個人専用の眼鏡用補正レンズを製造するために個々の幾何学的形態学的パラメータを決定する操作を、簡便化し、迅速性、正確性、利便性を向上し、かつ、受け入れられる程度のものとする。
【0011】
この目的のために、本発明は、眼鏡を装着した状態で、将来眼鏡をかけることになる人の頭に対する眼鏡用補正レンズの少なくともひとつの向きの成分を決定する方法を提供する。その方法は、
・フレーム又はフレームに装着したレンズに位置同定システム(位置同定システムは、少なくともひとつの既知の幾何学的特性を有する、少なくともひとつの同定要素を具備する)を取付ける工程と、
・画像撮影装置によって同定要素を顔の垂直面内の2次元で撮影する撮影工程と、
・同定要素の撮影された画像を加工して同定要素の既知の幾何学的特性に依存する幾何学的特性を計測する工程と、及び、
・同定要素の撮影された画像の幾何学的特性の計測値を既知の同定要素の幾何学的特性と比較して、レンズの向きの少なくともひとつの成分を計算する工程とを
を含む。
【0012】
位置同定システムは、少なくとも1つの水平同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段を具備し、水平同定要素は、眼鏡をかける人の頭に対するフレームのリムあるいはレンズの(ほぼ垂直な軸の回りの)向きの、撮影された画像(撮影画像)の計測された幾何学的特性が水平成分に依存するように配置されている。少なくとも1つの眼鏡をかける人の頭に対する補正レンズの向きの水平成分は上述の比較にしたがった関数として計算される。
【0013】
本発明は、また、この方法を実装する装置も提供する。
【0014】
設計製造される補正レンズの向きは、画像処理によって装着した状態で決定されるので、眼鏡を装着する人あるいは装着された視覚装置に接触せず、眼鏡技師による最低限の操作で、計測を可能にする。眼鏡技師は、単に、位置同定システムをフレーム上に置いて眼鏡をかける人に装着されたアセンブリの像を撮影するだけでよい。
【0015】
さらに、装置は、限られた数の道具を使用し、ただひとつの撮影された画像に基づいて、様々な幾何学的形態学的パラメータを計測することができる。これにより、幾何学的形態学的パラメータをより迅速、より信頼性高く、そして、より再現性の高い計測することができる。
【0016】
計測された同定要素の撮影された画像の幾何学的特性を既知の同定要素の撮影された画像の幾何学的特性との比較値が所望のレンズの向きの成分を表しており、計算することができる。
【0017】
補正レンズの向きの水平成分は、フレームのリムあるいは(すなわち)レンズの向きの水平成分に依存する。フレーム上の水平同定要素を配置することにより、補正レンズの向きの水平成分を決定することができる。
【0018】
本発明の別の側面として、
・フレームの2つのリムの一方あるいは2つのフレームに嵌め込まれた補正レンズの一方に直接的あるいは間接的に取付けられる第一の水平同定要素、フレームのもう一方のリムの1つあるいはフレームに嵌め込まれたもう一方の補正レンズに直接的あるいは間接的に取付けられる第二の水平同定要素の、少なくとも2つの水平同定要素を具備する、位置同定システム、
・顔面平面(facial plane)内の水平同定要素の2次元画像を撮影する工程を含む、撮影工程、
・撮影した画像を処理してその画像から各々の同定要素の(対応する同定要素の既知の幾何学的特性に依存する)幾何学的特性を計測する、処理工程、及び、
水平同定要素を撮影した画像の幾何学的特性の計測値と、対応する水平同定要素の既知の幾何学的特性とを比較して、各々補正レンズの将来眼鏡をかける人の頭に対する向きの少なくとも1つの水平成分を比較の関数として計算する、比較工程、
を提供するものであり、有利な効果が得られる。
【0019】
2つの水平同定要素を使用することによって、2つの補正レンズあるいはフレームの2つのリムの向きの水平成分を決定することが可能になり、補正レンズの向きの水平成分を正確に決定する。
【0020】
本発明の別の有利な効果によれば、撮影装置に対する両眼の二等分線の向きの水平成分に対応する姿勢角度は、計測された水平同定要素の撮影された画像の幾何学的特性を既知の幾何学的特性との比較の関数として計算できる。
【0021】
このように、計測された水平同定要素の撮影された画像の幾何学的特性間の差に基づいて、垂直軸からの頭のピボット回転角が決定される。姿勢角として知られているピボット回転角を決定することにより、計測値を較正できる。
【0022】
本発明の別の有利な特徴によれば、位置同定システムは、少なくとも1つの垂直同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段(取付手段)を具備し、垂直同定要素は、眼鏡をかける人の頭に対するフレームのリムあるいはレンズの(眼鏡をかける人を前後に貫きほぼ水平の矢状面に垂直な軸の回りの)向きの、撮影された画像の計測された幾何学的特性が垂直成分に依存するように配置されている。少なくとも1つの眼鏡をかける人の頭に対する補正レンズの向きの垂直成分は上述の比較にしたがった関数として計算される。
【0023】
本発明の別の特徴によれば、位置同定システムは、少なくとも1つの垂直同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段を具備し、垂直同定要素は、比較値が矢状面(sagittal plane)内のフレームの向きの垂直成分になるように配置されており、求めるべき向きの成分は補正レンズの向きの垂直成分を含んでいる。
【0024】
本発明の別の有利な特徴によれば、フレームに嵌め込まれた各々のレンズと対応する眼との間の距離が計測され、眼鏡を装着する人の頭に対する配置を表す少なくとも1つのパラメータがこの距離の関数として計算される。
【0025】
本発明の別の有利な特徴によれば、画像撮影手段と位置同定システムとの間の距離が計測される。この距離によって撮影された画像のスケール因子と無限遠での2つの眼の瞳孔間距離を計算することが可能となる。
【0026】
本発明の別の有利な特徴によれば、スケール因子を使用して、瞳孔間距離、瞳孔間半距離、各々の補正レンズの幅と高さ、及び、各々の瞳孔の高さのうち、少なくとも1つの個人専用の特性が撮影された画像から計測される。
【0027】
これらのパラメータは、幾何学的形態学的パラメータであって、補正レンズを設計製造する際、レンズに正確に(たとえば、屈折率などの)インデックスの傾斜をつけることを可能にする。
【0028】
本発明の別の有利な特徴によれば、瞳孔間距離、瞳孔間半距離、及び、各々の補正レンズの幅と高さの撮影された画像から得られる計測値は姿勢角の計測値の関数として補正され、各々のレンズの高さ用及び各々の瞳孔の高さ用の値は向きの計算値の垂直成分の関数として補正される。
【0029】
本発明の別の有利な特徴によれば、眼鏡装着者が無限遠方を見ている状態の瞳孔間距離又は瞳孔間半距離が計算される。
【0030】
本発明の別の有利な特徴によれば、瞳孔間距離又は瞳孔間半距離は、画像撮影手段と位置同定システムとの距離の関数として計算される。
【0031】
本発明の別の有利な特徴によれば、眼鏡装着者の2つの眼のうちの1つと関連する少なくとも1つのプリズム効果を有する光学部材、そのプリズム効果の方向に平行な端部を有して、位置同定システムに対してほぼ垂直に移動するように取り付けられて、対面して見るとその端部が瞳孔部分の像をオフセットするように眼の瞳孔を交差する、計測位置にい位置することができる部材を具備し、プロセッサ手段がプリズム効果を有する光学部材によって瞳孔のオフセット部分の像に応じてフレームに嵌め込んだレンズと対応する眼との間の距離を導出するように設計されている。着目している眼に対して、この装置は、ただ1つのプリズム効果を有する光学部材を有している。
【0032】
本発明の別の有利な特徴によれば、弾性戻りあるいは重力によってレンズに対してプリズム効果を有する光学部材を押し付ける手段(押付手段)を具備している。
【0033】
本発明の別の有利な特徴によれば、フレームあるいはレンズの向きを表す、少なくとも1つの既知の幾何学的特性を持った同定要素のために、締付手段によってシステムはフレーム上をほぼ垂直でありフレームあるいはレンズの中間面内に含まれる軸の周りに傾斜することができる。位置同定システムがフレーム上で水平軸の周りに傾斜するように製造されているとき、フレームあるいはレンズの向きの垂直成分を同定することが可能となり、眼鏡補正レンズの向きの垂直成分が製造される。
【0034】
位置同定システムをレンズあるいはフレームに対して傾け戻す弾性手段あるいは重力返り手段が有効に具備されている。これらの戻り手段(返り手段)によって位置同定システムは傾斜して設計製造すべき眼鏡補正レンズの向きの垂直成分を正確に決定することができる配置をとることができる。
【図面の簡単な説明】
【0035】
下記の限定ではなく例示としての実施態様の図を参照した以下の記載にて、発明がどこに存在しどのように実施されるかを明確に理解することが可能になる。
【0036】
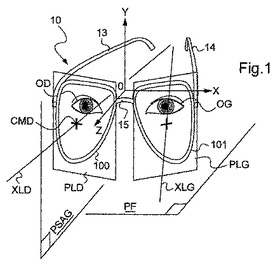
【図1】図1は、本実施態様の眼鏡の斜視図である。
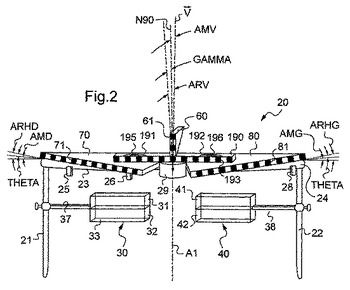
【図2】図2は、位置同定システムの斜視図である。
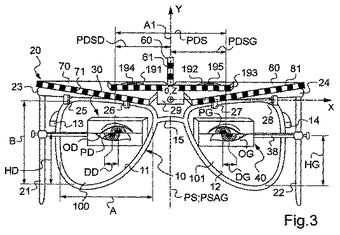
【図3】図3は、本実施態様の眼鏡、及び、位置同定システムの前面概略図である。
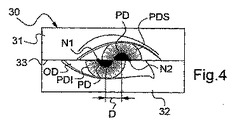
【図4】図4は、レンズと対応する眼との間の距離決定手段の図である。
【図5】図5は、本実施態様の眼鏡上に固定された位置を同定する図2のシステム、及び、プロセッサ及び計算システムと通信する画像撮影手段の斜視図である。
【図6】図6は、本実施態様の眼鏡を装着した眼鏡装着者の頭がまっすぐ前を向いているときの図である。
【図7】図7は、本実施態様の眼鏡を装着した眼鏡装着者の頭がまっすぐ前の方向からある角度をなしているときの平面図である。
【図8】図8は、レンズを装着した本実施態様の眼鏡のフレームの平面図である。
【図9】図9は、位置同定システムと画像撮影手段の原理を示す図である。
【図10】図10は、ひとつの変形態様における、レンズと対応する眼との間の距離決定手段の図である。
【図11】図11は、図10の距離決定手段及び眼鏡装着者の対応する眼の前面図である。
【図12】図12は、ひとつの変形態様における、位置同定システムの概略平面図である。
【図13】図13は、ひとつの変形態様における、図12の位置同定システムに取付けられたアンテナの図である。
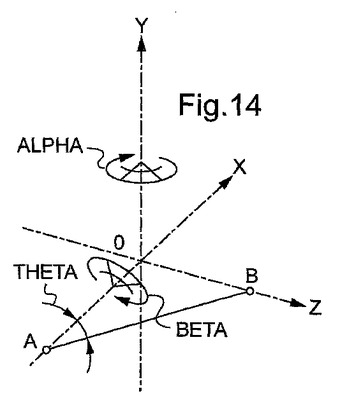
【図14】図14は、眼鏡装着者に関連するレファレンスフレームの概略図であり、フレーム上に固定する前の、システムの位置同定要素の部位を示している。
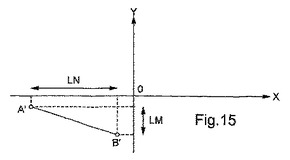
【図15】図15は、フレーム上に固定した後の、図14のシステムの位置同定要素の部位の前面投影概略図である。
【発明を実施するための形態】
【0037】
以下の記載において、眼鏡のフレーム10に取付けられることになる眼鏡レンズ(図示しない)の各々を補正するためのレファレンスのフレームの配置は、眼鏡が装着された状態において、眼鏡装着者に関連してかつ眼鏡装着者の眼に対するレファレンスのあるフレーム内にて決定される。眼鏡装着者のレファレンスのあるフレームに対する、眼鏡レンズの各々を補正するためのレファレンスのフレームの配置は、眼鏡装着者のレファレンスのフレームに対するレンズのレファレンスのフレームの関数として、レンズの一方若しくはもう一方の光学的に有用な面を形状計測する、又は、レンズの屈折率の傾斜を計測することによる補正レンズの個人用の設計製造方法を実行することで使用に供するように決定される。
【0038】
レファレンスの地球フレーム、たとえば、眼鏡技師の事務所の地球フレームが使用される。レファレンスの地球フレームは、2つの互いに垂直な軸H1、H2構成される水平面PH、及び、垂直方向Vによって決定される。第一垂直面PV1は軸Vと軸H1によって定義される。第二垂直面PV2は軸Vと軸H2によって定義される。
【0039】
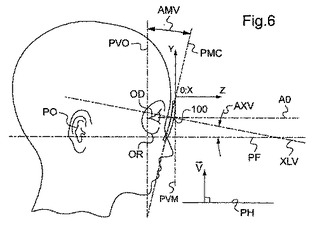
眼鏡装着者は頭をまっすぐ前に向けて立ってあるいは座っている、すなわち、装着者の頭に対応するフランクフォルト面(Frankfort plane)PFは、ほぼ水平である。図6に示すように、フランクフォルト面PFは、底の軌道点ORと装着者の左側の部位POを通過する平面として定義される。装着者の左側の部位POは、耳点(tragion)に対応する耳道の頭蓋骨の最も高い箇所である。眼鏡装着者の凝視軸は、主凝視軸、すなわち、装着者がまっすぐ前の水平線を見ているときのものであり、別の言い方では、装着者は最も楽な直立姿勢をとっているときのものであるとも言える。
【0040】
矢状面PSAGは、2つの眼OGとODとの間の眼と眼の間の二等分面AOを含む垂直面として定義される。眼と眼の間の二等分面AOは、2つの眼の回転CROGと回転CRODの中心によって定義される部位の中間を通過し、フランクフォルト面PFに平行な軸である。垂直眼面PVOもまた2つの眼の回転CROGと回転CROD中心間をつなぐ垂直面として定義される。
【0041】
各々の補正レンズのレファレンスの配置は、以下によって決定される。
・ フレームに取付けるための、対応する装着者の眼に対する、各々の補正レンズの向き(方向)
・ 装着した状態で、矢状面PSAGの水平方向(以下に定義される軸Zの方向)に沿ってのレンズとレンズに対応する装着者の眼との間の距離
【0042】
レンズの向きは、取付交差点でのレンズに接する平面に垂直なベクトルの成分によって与えられる。この取付交差点は、レンズは正確に光学的補正として機能するレンズが設計製造されるように、眼の瞳孔に位置を合わせて配置されるべきレンズ上の点に対応する。レンズの向きの垂直成分は、矢状面への投影された顔面平面に対して、軸あるいはレンズの面に垂直なベクトルによって形成される角度に一致する。レンズの向きの水平成分もまた、フランクフォルト面への射影として、顔面平面に対して、軸あるいはレンズの面に垂直なベクトルによって形成される角度に一致するものと定義される。
【0043】
各々の対応するレンズのレファレンスのフレームは、装着者とフレームに関する幾何学的形態学的パラメータを決定する一方で、設計製造される補正レンズの位置を占め、かつ、販売目的あるいは計測目的のフレームに装着されたレンズ100、101の各々に対してレファレンスのフレームの配置を決定することによって得ることができる。
【0044】
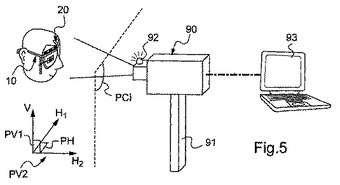
図5に、眼鏡をかけている人(眼鏡装着者)の個別の幾何学的形態学的パラメータを決定する装置を示している。個別の幾何学的形態学的パラメータは、特に、眼鏡装着者のレファレンスのフレームに対して設計製造される各々の補正レンズのレファレンスのフレームの配置、及び、以下に具体的に説明する幾何学的形態学的パラメータを含んでいる。
【0045】
この装置は、フレーム10に取付ける位置同定システム20、および、装着状態でフレーム10に取付けられた位置同定システム20の画像を撮影する撮影手段90を備えており、画像は画像撮影面PCI内で撮影される。撮影手段90は、その画像に処理を施すプロセッサと計測計算システム93に接続されている。
【0046】
眼鏡は、(補正されていない)レンズ100、101と共に、装着者が選択したフレーム10を備えている。図示した例においては、眼鏡はリムを有している、すなわち、レンズはフレーム10のリム11、12に装着されている。変形態様では、ピアスタイプの眼鏡、すなわち、レンズが貫通されたものでもよく、各々のレンズはレンズに付属するノーズブリッジのひとつの端およびレンズに付属するアームのひとつの端で保持されている。ブリッジとアームは貫通孔でつなげられている。
【0047】
図1および図2に示されているように、位置同定システム20は、実質的に一直線上にあって同じ平面内にあって、かつ、眼鏡を装着した状態で実質的に垂直なヒンジ軸A1を有するヒンジ29でつながれた2つのクロスバー23、24を持つ、ヒンジ付のフレームを備えている。
【0048】
各々のクロスバー23、24は、ここではクランプとして示されている締付部材25、26、27、28を備えている。これらのクランプは、各々のクロスバー23、24をフレーム(図3)のリム11、12に対応する、眼鏡がピアスタイプの場合には、対応するレンズに対応する、ほぼ水平上部でピボット回転できる状態で締付けることができる。
【0049】
各々のクロスバー23、24は、所定の厚さを持ち、かつ、前方の画像撮影面PCIに向かって突出するとき、幾何学パターン71、81の幾何学的配置が同定要素70、80の向きの水平成分(水平方向成分)を表すように設計製造された幾何学パターン71、81を表している端を持った三角形板の同定要素70、80によって覆い被されている。本発明の向きの水平成分(水平方向成分)は、同定要素の長手方向とフランクフォルト面PFに投影された顔面平面PVOとの間の角度によって定義される。同様に、同定要素の向きの垂直成分(垂直方向成分)は、同定要素の長手方向が矢状面PSAGに投影された顔面平面PVOに対してなす角度によって定義される。
【0050】
この例では、幾何学的なパターンは、交互の濃い色のストライプと薄い色のストライプによって構成されて所定の間隔を持った繰返しモチーフからなっており、十分なコントラストを提供している。幾何学パターン71、81のモチーフは、水平同定要素70、80に対応する端の長手方向に伸延している。その結果、この例では、装着状態において、各々の濃い色のストライプは実質的に垂直である。
【0051】
最初は、幾何学パターン71、81を有する端が前から見え、次に、幾何学パターンが伸延する方向(すなわち、対応する端の長手方向)は水平面PH内でクロスバー23、24の長手方向(すなわち、締付けクランプを貫通する直線)に対してほぼ30°の角度THETAをなすように、各々の水平同定要素70、80は、対応するクロスバー23、24に締付けられている。
【0052】
2つの水平同定要素70、80は、2つの水平同定要素70、80と機械的に関連している中間同定部材190によって相互に連結して、2つの水平同定要素70、80の間にある垂直対称面に対して固定されて、かつ、フレームの対称面PSに実質的に一致する(フレーム自身は装着者の矢状面PSAGに実質的に一致する)位置を定常的に保持している。以下で詳細に説明するように、この中間の同定要素は、画像撮影面PCIへ射影された画像撮影手段90から見て、画像を表す既知の幾何学パターンを有しているので、同定要素70、80と組み合わせることによって同定システム20の3次元で向きと位置を同定することが可能となる。
【0053】
具体的には、この中間同定部材190は、対称面PSに実質的に垂直(結果として、矢状面PSAGに垂直)の長手方向にあるホルダーバーによって構成されている。ホルダーバー190に細長い形状の2つのスロット191、192が形成されて、バーの長手方向に向いている。これら2つのスロット191、192は、同定要素70、80の上面に取付けられている2つの案内スタッド195、196を受ける。そして、各々の同定要素70、80は、ホルダーバー190に対してバーの長手方向に横滑りできるようになる。スタッド195、196は、スロットに沿った同定要素70、80の動きを案内する。
【0054】
同定要素70、80のホルダーバー190に対するこの横滑り動作は、ピボット回転軸A1の周りのピボット回転動作と組み合わされて、クロスバー23、24でリム11、12又はフレーム10のレンズを水平方向に力をかけずに押して、リム11、12に力をかけることなく水平同定要素70、80を締付けることができる。
【0055】
ホルダーバー190は、画像撮影手段90に面する端で、互いに所定の間隔を置いている濃い色のストライプから構成される幾何学的パターン193も備えている。いかに説明するように、これらの濃い色のストライプは位置同定システム20と画像撮影手段90との間の距離を計測計算するのに使用することができるので、撮影画像のスケール因子を決定することができる。
【0056】
位置同定システム20をフレームの対称面PS上でセンタリングして、ノーズブリッジ15を軸A1上でセンタリングする、センタリング手段も備えている。
【0057】
位置同定システム20は、所定の厚さを持った三角板から構成され、かつ、レンズ100、101に関連する2つの水平同定要素70、80の平均面に実質的に垂直な面内に伸びる、垂直同定要素60も備えている。垂直同定要素60は、画像撮影手段90に向かって面している、幾何学的パターン61をそのひとつの端に備えている。この幾何学的パターン61は、上述したように、互いに所定の間隔を置いている濃い色のストライプからなり、垂直同定要素60の対応する端の長手方向に伸びる幾何学的なモチーフによって構成されている。この例では、結果として、各々の濃い入りのストライプは実質的に装着した状態に配置され、幾何学的パターン61は実質的に垂直方向に伸びる。
【0058】
垂直同定要素60は、のホルダーバー190の上面に中心で締付けられる。幾何学的パターン61を持つ垂直同定要素60の端は、眼の回転中心CROG、CRODを相互に接続して、かつ、矢状面PSAG内でホルダーバー190の上面に対して法線N90に一定の角度GAMMA(30°)を形成する線に実質的に平行な面内に伸びる(図2)。
【0059】
クロスバー23、24の自由端近傍に、クロスバー23、24に垂直な、2つの互いに平行な支柱21、22を備えている。支柱21、22は、装着時には実質的に垂直である。位置同定システム20がフレームに固定されたとき、支柱21、22は、フレーム10のアーム13、14の近傍で、装着者の左右のこめかみの脇に位置している(図3参照)。
【0060】
2つの水平ロッド37、38は、支柱21、22に沿って横滑りするように取付けられている。もう一方のロッドに向かっている一方のロッドの端で、各々のロッドはプリズムのペア30、40を備えている。プリズムのペア30、40は、それぞれ、互いに対面する傾斜を持つ、プリズムのペア31と32、プリズムのペア41と42から構成されている。図4に示すように、分離線33は、各々のペアの2つのプリズムの間にある。2つのプリズムは光線を水平方向H1あるいは軸OXに沿って同じ量だけ反対方向に屈折する。プリズムのペア30、40は、以下に説明するように、各々のレンズ100、101と対応する眼OD、OGとの間の距離を計測するようにされている。位置同定システム20の構造は、位置同定システム20が眼鏡装着者の鼻に装着されたフレーム10に固定されたとき、プリズム31、32、41、42は重力の下でレンズ100、101の方へ持って行かれるように設計製造されている。この重力によって持って行かれること(重力による移動)は、位置同定システムを重力中心が前方、すなわち、幾何学的パターンと同じ側に向かう配置するように設計製造することで得ることができる。三角板の前面に重さをかけるあるいは重くすることも可能になる。変形態様においては、プリズムをレンズに押し付けるために、プリズムを備えた支柱21、22に作用する弾性返り手段を備えることもできる。
【0061】
プリズムのペア30、40を支持しているロッド37、38は、位置同定システム20の支柱21、22に対して水平方向に静止している。このように、プリズムは、眼鏡装着者の瞳孔間距離の大きさにかかわらず、眼鏡装着者の瞳孔PG、PDを越えて覆うことができる程度に水平方向に伸延するように設計製造されている。
【0062】
画像撮影手段90は、典型的には、ポータブルデジタルカメラ、または、支柱あるいはスタンドに取り付けられたカメラを備えている。図示された例では、画像撮影手段90は、フレーム10と眼鏡装着者によって装着された位置同定システム20の全体の画像を容易に撮影できるにように高さが調整可能なスタンド91を備えている。
【0063】
画像撮影手段90は、眼鏡装着者が座っている間に画像が撮影できるように設計製造されている。このように、画像撮影手段90は、相対的に小さく、眼鏡装着者が座っている座席に面しているテーブルの上に置くことができる。変形態様では、画像撮影手段90は、眼鏡装着者が立っている間に画像が撮影できるように設計製造されることができる。
【0064】
画像撮影手段90は、好適には、第一に撮影画像から容易に同定できるように角膜反射が得られるようにされ、第二に、発光ダイオードLEDに対して装着者が注意を惹かれるようにされた、既知の位置にある発光ダイオード(LED)92を備える。これによって、撮影画像の処理が容易になる。
【0065】
撮影された画像に作用する、プロセッサ及び計測システム93は、マイクロコンピュータを備えている。マイクロコンピュータには、撮影された画像を処理する処理計測ソフトウェアがインストールされている。変形態様では、プロセッサ及び計測システム93は、第一に、結果を表示するディスプレイ、第二に、その結果を他の装置へ通信する接続手段を備えた、独立のシステムとしてマイクロコンピュータを備えることもできる。独立処理システムと画像撮影手段90を一体とする選択肢もある。
【0066】
上述の決定装置は、装着者のレファレンスのフレームに対する フレームに取り付けられることになる各々の補正レンズ用のレファレンスのフレームの配置を決定するために実装された以下の処理を実行することができる。
【0067】
以下に記載する右目ODに対する方法は、左目OGに対しても有効である。
【0068】
図5に示すように、眼鏡技師は、位置同定システム20が備わった眼鏡のペアを眼鏡装着者の鼻にかける。装着者は頭をまっすぐに向けて座ることも立つこともでき、このとき、フランクフォルト面PFはほぼ水平である。
【0069】
図3に示したように、クロスバー23の2つの固定クランプ25、26は、フレーム10の右側のリム11の上部に取付けられている。同様に、クロスバー24の2つの固定クランプ27、28は、フレーム10の左側のリム12の上部に取付けられている。好適には、固定クランプのペア25と26、27と28は、対応するクロスバー23、24がこれらに固定されているリム11、12の水平方向成分を追跡できるように、お互いにできる限り空間的に離してある。各々のリムの水平方向成分(向きの水平成分)は全体としてフランクフォルト面に射影された矢状面に対するレンズの傾斜に対応する。
【0070】
ホルダーバー190は、2つの水平同定要素70、80が実質的に同一面内に確実に留まるように機能するようにされている。結果として、位置同定システム20がフレーム10に取り付けられたとき、垂直同定要素60は、実際、フレームの対称面内に伸びている(図3、5参照)。
【0071】
適当な高さに調整されたロッド37、38によって支持されているプリズムのペア30、40の各々は、眼鏡技師によって、対応する眼の瞳孔PG、PDに揃えて置かれている。より正確には、眼鏡装着者を前から見て、眼鏡技師は、プリズムのペア30、40の各々の分離線33が対応する瞳孔PG、PDの中心を通過するようにする(図4)。
【0072】
位置同定システム20は、関連する眼の瞳孔PG、PDに揃えて置かれた各々のプリズムのペア30、40が、重力の下で対応するレンズ100、101の前面に対面するように持って行かれるように設計製造されている。プリズムのペア30、40は、2つの瞳孔の中心を貫通する軸に実質的に平行な軸の周りに傾斜している(その結果、矢状面PSAGに実質的に垂直であり、以下に定義される軸Xに平行である)クロスバー23、24によって、重力の下で対応するレンズ100、101に対面するように持って行かれる。このように、固定クランプは、位置同定システム20を傾斜軸の周りに傾斜させることができるヒンジとして機能する。
【0073】
その結果、ホルダーバー190の上面に対する法線N90は、フレーム10の向きの垂直成分を追従する。垂直面PVOに対して、フレームの複数のリムの平均面である矢状面PSAG内の傾斜角に全体として対応する(図6)。
【0074】
固定クランプ25、26がフレーム10のリム11を支持する2つの点、および、プリズムのペア30がレンズ100を支持する点(すなわち、取付交差に対応する点)は、装着時に補正レンズの平均面となるレンズ100の平均面PLDを定義する(図1、3)。同様に、レンズ101の面PLGは、フレーム10のリム12上の固定クランプ27、28の2つの支持点、および、プリズムのペア40がレンズ101を支持する点を貫通する面として定義される。
【0075】
図1に示すように、レファレンスのフレームは、フレームに(結果として、間接的には装着者の頭に)関連して定義され、互いに直交する軸(O,X,Y、Z)と参照番号20として参照されるものを表す。たとえば、レファレンスのフレームの中心Oは、固定クランプ26、27を相互接続する部位の真中である。X軸は水平であり、固定クランプ26、27を通過している。Y軸はフランクフォルト面に垂直であって、この例では垂直である。そして、OYZ平面は垂直であり、矢状面PSAGに、また、対称面PSにも対応している。軸OZは眼の二等分線AOに平行である。OXZ面はフランクフォルト面PSに平行であり、この例では水平である。OXY面は、フレーム垂直面PVMとして参照され、画像撮影面PCIに実質的に平行である。
【0076】
各々のレンズの向きは、レファレンスのフレーム(O,X,Y、Z)において、取付交差点CMG,CMDでレンズに接する面に垂直のベクトルの成分として与えられる。取付交差点は、設計製造されるべきレンズが正確に光学補正関数として機能するように、装着者の目の瞳孔に揃えて置いたレンズの点に対応する。レンズの向きの垂直成分は、矢状面に投影されて、顔面平面に対するレンズの面に垂直な軸あるいはベクトルによって形成される角度に対応する。レンズの向きの水平成分もまた、フランクフォルト面に投影されて顔面平面に対するレンズのフレームに垂直な軸あるいはベクトルによって形成される角度に対応するものとして定義される。
【0077】
面PLG,PLDの向きは、製造されるべき補正レンズの各々の装着者のレファレンスのフレームに対する向きがわかるように決定される必要がある。面PLG,PLDの各々の向きを決定するために、プリズム30、40がレンズ100、101を支持する複数の点を貫通して、かつ、面PLG,PLDに垂直な、軸XLD,XLGの向きは決定される。
【0078】
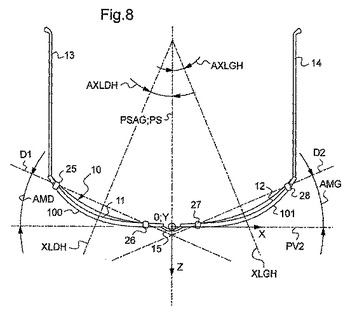
図8に示すように、軸XLGH、XLDHは、軸XLG、XLDのフランクフォルト面あるいは水平面への射影として定義される。同様に、軸XLVは、軸XLG、XLDの矢状面への射影として定義される(図6)。ここで、軸XLG、XLDの矢状面への双方の射影は、同一の射影軸XLVを与えるものと前提している。変形態様では、2つの軸XLG,XLDの矢状面への射影を区別することが可能である。
【0079】
このように、各々のレンズ100、101の向きの水平成分は、軸XLGH、XLDHと装着者の矢状面PSAGとによって形成される角度AXLGH、AXLDHに対応している。同様に、各々のレンズ100、101の向きの垂直成分は、軸XLVとフランクフォルト面とによって形成される角度AXVに対応している。そして、装着者に対する各々のレンズの向きを決定するためには、さらに、角度AXLGH、AXLDH、AXVを決定する必要がある。
【0080】
軸XLGHと矢状面PSAGとの間に形成される角度AXLDHは、第一に、それぞれ、ノーズブリッジ15、右側のリム13近傍にある、右側のリム11を支持する固定クランプ25、26を通過する直線D1間に水平面PH内に、第二に、フレーム垂直面PVMに形成される角度AMDに実質的に対応している。同様に、角度AXLGHは、第一に、それぞれ、ノーズブリッジ15、左側のリム14近傍にある、左側のリム12を支持する固定クランプ27、29を通過する直線D2間に水平面PH内に、第二に、フレーム垂直面PVM形成される角度AMGに実質的に対応する。このように、各々の角度AXLGH、AXLDHを決定するためには、角度AMG、AMDを決定すれば十分である。
【0081】
同様に、図6に示されているように、角度AXVは、矢状面PSAGへの射影内で第一に、眼OG,ODを通過してレンズの矢状面PSAGに垂直な垂直面PVOの間に、第二に、2つのレンズ100、101(あるいは、フレーム10の2つのリム11、12)の平均面PMCに形成される角度AMVに実質的に等しい。角度AXVを決定するためには、角度AMVを決定すれば十分である。
【0082】
眼鏡技師は、ポータブル画像撮影装置90を装着者の頭に対面するように置いて、画像撮影手段90のスタンド91を調整して、撮影面PCI内で位置同定装置20で覆われた眼鏡を装着している装着者の頭の画像を撮影する。得られた画像は図3の画像に対応する。画像の撮影は典型的には装着者から50cmから120cmの範囲の距離で撮影面PCI内にてなされる。撮影面PCIは、対面している、すなわち、面PVO、PVMに平行である(図5、6)。
【0083】
図2に示すように、角度ARHDは、水平面PHあるいはフランクフォルト面PF内に、第一に、フレーム垂直面PVM、および、第二に、幾何学的パターン71の長手方向の間に形成される角度として定義される。この角度ARHDが変化するとき、黒色のストライプと黒色のストライプの間の空間的間隙も面PVMに平行な画像撮影面PCIへの射影内で変化する。この角度ARHGは、角度AMGと30°である一定の角度THETAの和に等しい。このように、この角度ARHDは、角度AMDと同じように変化する。角度ARHGが角度AMGと30°である一定の角度THETAの和として定義される水平同定要素80に対しても同様のことが成り立つ。
【0084】
プロセッサ計測システム93は、装着された状態で撮影された画像の中の水平同定要素70の幾何学的パタ−ン71の濃い色のストライプ間の空間的間隙を計測する。撮影画像のピクセル(画素)に起因する撮影された画像の測定誤差を制限するために、プロセッサ計測システム93は、ペアのストライプ間の空間的間隙を計測してその空間的間隙の平均値を計算する。その後、角度ARHD及びストライプ間の空間的間隙が知られた幾何学的パタ−ン71用のレファレンスの配置と比較して、システムは装着状態とレファレンス配置との間でのストライプ間の空間的間隙のズレ(差)を決定する。その後、プロセッサ計測システム93は、空間的間隙のズレ(差)の関数として角度ARHDを決定する。そして、角度ARHDに基づいて角度AMDが決定される。
【0085】
ストリップ間の空間的間隙の正確な比較を行うために、プロセッサ計測システムは、撮影画像のスケール因子を考慮する必要がある。スケール因子を知ることによって、ストライプの空間的間隙を比較できるように、撮影画像内の計測されるストライプの空間的間隙と共通因子に対するレファレンスのストライプの空間的間隙の値を減らすことができる。スケール因子は位置同定システムと画像撮影手段との間の距離から決定される。
【0086】
分離距離、レファレンスDは、以下に説明する計算方法によって得ることができる。
【0087】
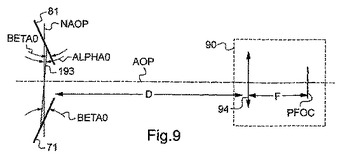
図9に概略的に示したように、決定装置が上から見られるとき、ホルダーバー190の幾何学的パターン193の長手方向は、光学軸AOPに対する法線NAOPとともに角度ALPHA0を形成する。同様にして、同定要素70、80に対応する幾何学的パターン71、81の各々は、ホルダーバー190の幾何学的パターン193の長手方向とともに角度BETA0を形成する。幾何学的パターン71、81は既知の同一の長さHを持ち、同様に、幾何学的パターン193は既知の長さLを持つことが仮定されている。
【0088】
濃い色のストライプ間の空間的間隙を使用する際、ホルダーバー190の幾何学的パターン193の見かけ上の長さTはレンズ94の焦点面PFOC内で計測される。以下の関係式が成り立つ。
L×COS(ALPHA0)×F/D=T
ここで、Fは、レンズ94の焦点距離、Dは、画像撮影装置90と位置同定システム20に関連するレファレンスのフレームの原点Oとの間の距離である。
【0089】
幾何学的パターン71、81の焦点面PFOC内における見かけ上の長さT1、T2も計測される。以下の関係式が成り立つ。
H×COS(BETA0−ALPHA0)×F/D=T1
および、
H×COS(BETA0+ALPHA0)×F/D=T2
【0090】
次に、2つの見かけ上の長さT1、T2の和をとることによってBETA0の近似値が計算される。すなわち、
T1+T2=2×COS(BETA0)×COS(ALPHA0)×F/D
ここで、ALPHA0がほぼ1であると仮定すると、次式が得られる。
T1+T2=2×COS(BETA0)×H×T/L
この式からBETA0の近似値を導出することができる。
【0091】
次に、これら2つの長さの比KがH×F/Dを削除することで計算される。
K=(COS(BETA0)COS(ALPHA0)+SIN(BETA0)SIN(ALPHA0))/(COS(BETA0)COS(ALPHA0)−SIN(BETA0)SIN(ALPHA0))
KおよびBETA0は既知であるので、以下の関係式を用いてALPHA0は計算することができる。
TAN(ALPHA0)=[(K−1)×COS(BETA0)]/[(K+1)×SIN(BETA0)]
【0092】
このように、F,Lの値が既知であるとし、Tの測定値を用いて距離Dは導出される。
D=L×COS(ALPHA0)×F/T
【0093】
分離距離を直接決定するためにレーザダイオードテレメータを使用することもできる。
【0094】
プロセッサ計測システム93は、装着した状態で撮影画像の中の水平同定要素80の幾何学的パターン81の濃い色のストライプ間の空間的間隙も計測できる。上述のように、撮影画像のピクセルに起因する撮影画像の中の測定誤差を制限するために、プロセッサ計測システム93は、ストライプ間の空間的間隙をペアで計測してその平均値をとる。その後、角度ARHGとストライプ間の空間的間隙が既知である幾何学的パターン81のレファレンス配置と比較して、装着状態のストライプとレファレンス状態のストライプ間の空間的間隙のズレを決定する。ストライプ間の空間的間隙は撮影画像のスケール因子を考慮して比較される。その後、プロセッサ計測システム93は、角度ARHGを上記空間的間隙のズレの関数として決定する。そして、角度AMGは角度ARHGから決定される。
【0095】
図2に示すように、角度ARVは矢状面PSAGへの射影の中に第一にフレーム垂直面PVMと第二に幾何学的パターン61の長手方向との間に形成される角度として決定される。角度ARVが変化するとき、画像撮影面PCIへの射影と同様に、濃い色のストライプ間の空間的間隙も変化する。この角度ARVは、角度AMVと法線N90に対して幾何学的パターン61がなす一定角GAMMA(30°)の和に等しい。このように、角度AMVと同じように、角度ARVは変化する。
【0096】
次に、プロセッサ計測システム93は、撮影画像上で幾何学的パターン61のストライプ間の空間的間隙を計測する。前と同じように、既知の角度ARVと既知のストライプ間の空間的間隙とから構成されるデータペア幾何学的パターン61のレファレンス配置が提供される。撮影画像上でのストライプ間の空間的間隙の計測値とストライプ間の空間的間隙のレファレンスの値を比較して、プロセッサ計測システム93は、空間的間隙のズレを導出する。前と同じように、ストライプ間の空間的間隙は撮影画像のスケール因子を考慮して比較される。その後、プロセッサ計測システムは、空間的間隙のズレの関数として角度ARVを決定する。このように、角度AMVは角度ARVから決定される。
【0097】
このように、プロセッサ計測システムは、フランクフォルト面および矢状面PSAGに対する左右のレンズの軸XLG,XLDの向きを決定する。その結果、装着者のレファレンスのフレームにおける左右のレンズの各々に関連する複数の面の向きが知られる。このようにして、対応する眼に対するフレームに取付ける各々の補正レンズの向きが知られる。
【0098】
レンズ100と眼ODとの間の距離を計測するために、プロセッサ計測システム93は、第一プリズム31によって屈折された瞳孔PDの画像の上部PDSの中心と第二プリズム32によって屈折された瞳孔PDの画像の底部PDIの中心との間の水平方向のオフセットDDを計算する(図4)。
【0099】
このように、プロセッサ計測システム93は、矢状面PSAGからの水平方向の距離を決定する。すなわち、オフセットDDに基づき比例関係を使ってZ軸に沿ってレンズ100と眼ODとの間の距離を決定する。同様に、レンズ101と眼OGとの間の距離は、プリズムペア40を通して見た眼OGの画像の上部と底部との間を計測した水平方向のオフセットDGから決定される。
【0100】
このように、各々のレンズ100、101と対応する眼OD,OGとの間の距離、および、各々のレンズの向きから、装着者の眼に合わせて製造される各々の補正レンズのレファレンスのフレームの配置が導き出される。
【0101】
眼鏡装着者がまっすぐ前を向いている装着状態、すなわち、矢状面PSAGが画像撮影面PCIに垂直である状態において、角度AMGは角度AMDに等しい。
【0102】
角度AMG、AMDが異なる値のとき、装着者の頭は垂直軸の周りに姿勢角APIVだけ回転している。
【0103】
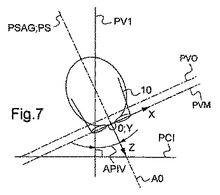
図7に示すように、姿勢角APIVは、2つの眼の間の二等分線AOと画像撮影面PCIに垂直な軸との間に水平面PH内に形成される角度である。
【0104】
角度AMGと角度AMDとの値の差は、姿勢角APIVの値に比例する。そこで、プロセッサ計測システム93は、測定された角度AMGと角度AMDとの値の差の関数として姿勢角APIVの値を計算する。この姿勢角APIVの値は、角度AMGと角度AMDの値を補正する役目を果たす。
【0105】
さらに、改良して光学的に設計製造する個人用のデータとしてより良く機能できるようにするために、レンズを設計製造する際に屈折率の傾斜を改良するのに使用される幾何学的形態学的パラメータが決定される。
【0106】
プロセッサ計測システム93は、スケール因子を考慮して、レンズを覆うリム11、12の幅Bと長さAの寸法を決定するために画像認識を行う。プロセッサ計測システム93は、スケール因子を考慮して、瞳孔PD,PGの中心に位置する分離線34とレンズの最も低い点としてのレファレンス点(参照点)との間の撮影画像の中での距離を計測することによって、対応する眼OG,ODの高さHG、HDを決定するためにも画像認識を用いる。
【0107】
瞳孔間距離PDSを計測するために、プロセッサ計測システム93は、画像認識を使用して各々の眼に対する点N1と点N2との間で画定される部位の中心を決定する(図4)。点N1と点N2は分離線34と屈折した瞳孔の上部と底部の輪郭の画像との間の最も離れた交差する点によって定義される。各々のプリズムペアのプリズムによる屈折は向きは反対で大きさは同じであり、上述したように定義される、点N1と点N2との間で画定される部位の中心は、実際、屈折していない瞳孔の中心に対応する。このようにして得られる、2つの瞳孔PG,PDの中心によって定義される部位によって、瞳孔間距離PDSを得ることができる。ノーズブリッジ15の中心に対する各々の瞳孔PG,PDの中心の水平位置を計測して、瞳孔間半距離PDS1、PDS2を計測することも可能である。
【0108】
この例では、レファレンス収束配置(reference convergence configuration)での、瞳孔間距離PDS、あるいは、瞳孔間半距離PDS1、PDS2が計測される。このレファレンス収束配置では、装着者の眼がしっかりと画像撮影手段、すなわち、LED92のライトを凝視している。そして、プロセッサ計測システムは撮影距離および対応する瞳孔間距離PDS(あるいは、瞳孔間半距離)の計測値の関数として機能して、無限遠を見ているときの瞳孔間距離の値を決定する。
【0109】
当然に、すべての計測はスケール因子を考慮して実行される。
【0110】
以前に計測計算した角度AMD,AMGの関数として、姿勢角APIVの関数として、あるいは、眼OD,OGと対応するレンズ100、101との間の距離の差の関数として計測値を補正することによって、瞳孔間距離、瞳孔間半距離、および、幅の寸法Aの計算値の精度を改善することも可能である。同様に、角度AMVを考慮することによって、高さの寸法H、および、各々の眼の瞳孔の高さHG,HDも改善することができる。
【0111】
クロスバー23、24の長手方向に対する幾何学パターン71、81の長手方向の傾斜は、角度AMG,AMDが変化したとき、ストライプ間の空間間隙の変化を増加するのに使用される。このように、既知のレファレンス配置に対して角度AMG,AMDが変化した結果生じた2つのストライプ間の空間間隙は、より容易に同定することができる。このように、空間間隙の比較は、フレームの各々のリム11、12の、つまり、各々のレンズの向きの水平成分をあらわしており、測定誤差を制限している。
【0112】
法線N90に対する幾何学パターン61の長手方向の傾斜に関しても同様のことがいえる。この傾斜は、角度AMVが変化するときのストリップ間の空間間隙の変化の値を増加する。
【0113】
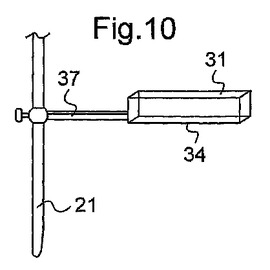
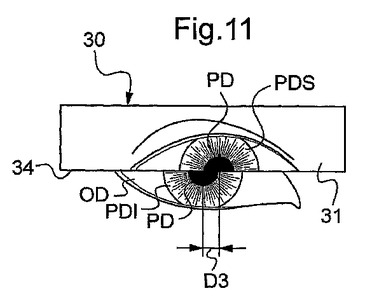
図10に示したように、変形態様では、1つの眼に対して1つのプリズム31のみを使用することもできる。このとき、その底の端34が分離線として機能する。図11に示したように、底の端34で定義される分離線は、装着者の瞳孔PDの中心を越えた位置にある。瞳孔の上部の画像は距離D3だけ水平方向に屈折され、これに対して、瞳孔の底部の画像は屈折することなく画像撮影手段90によって直接見える。上述したように、距離D3はレンズ100と眼ODとの間の距離を導出するのに使用される。レンズ101と眼OGとの間の距離も同様に導出される。
【0114】
さらに、画像撮影手段90は、眼の底部を直接みることができるので、プロセッサ計測システム93は、スケール因子を考慮して、瞳孔間距離PDSあるいは瞳孔間半距離PDS1、PDS2を撮影画像から直接計測することができる。各々の眼から1つのプリズムを取り除くことで使用される部品数を低減することができ、軽量化が図れる。
【0115】
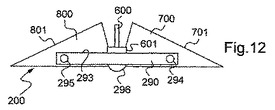
第二実施態様では、いくつかの第一実施態様の要素(部材)と同じ部材、特に、図2、3に示されている部材を利用する。図12にみられるように、位置同定システム200は、装着者の左眼OGあるいは左レンズに関連する同定要素700、および、装着者の右眼ODあるいは右レンズに関連する同定要素800を備えている。前と同じように、各々の同定要素700、800は、端の長手方向に伸びる幾何学的パターン710,810となる端を有している。前と同じように、同定要素700、800は、各々の幾何学的パターン710,810がほぼ30°である対応するクロスバーの長手方向に対する角度THETAを形成するようにクロスバーに取付けられている。
【0116】
装着状態で2つの同定要素700、800を垂直軸の周りにピボット回転させるための同じようなピボット手段296も備えられている。
【0117】
細長い開口を有する同じようなホルダーバー290も備えられ、同定要素700、800に取付けられている案内スタッド294,295は、ホルダーバー290に沿って動くことができる。この第二実施態様では、第一実施態様にはあった同定要素60は省略されている。
【0118】
第一実施態様においてそうであったように、対応するレンズの縁に配置されたクロスバーは固定手段を備えている。
【0119】
図2,10において第一実施態様で記載したようにプリズム(図示しない)は、同じように各々の眼と対応するレンズとの間の距離を計測するのに使用されている。これらのプリズムは、前と同じように、取付け交差点でレンズに接する面PLG,PLD(図1)を定義できるように取付け交差点でレンズに接触する。これらの面PLG,PLDは、前と同じように、設計製造されるべき補正レンズに取付け交差点で接している面と考えられる。そし故、対応する面PLG,PLDに垂直なベクトルを決定して、設計製造されるべき補正レンズの向きを決定することができる。
【0120】
2の同定要素700、800は、第一実施態様の2つの同定要素70、80と同じ構造をなしているが、その使用のされ方が異なる。第一実施態様では、設計製造されるべき各々の補正レンズの向きは、対応する水平同定要素70、80の画像撮影面内の向きだけからではなく、垂直同定要素60からも決定される。これに対して、第二実施態様では、概略的にいえば、設計製造されるべき各々の補正レンズの向きは、対応する同定要素700、800の画像撮影面内の向きから決定される。
【0121】
第二実施態様では、設計製造されるべき各々の補正レンズの向きの決定方法は、左レンズに関して以下に記載されるが、同様な議論は当然に右レンズにも適用できる。
【0122】
レファレンスのフレームOXYZは第一実施例とまったく同じように定義される。
【0123】
装着時の撮影画像内の面PLGの向きは当初面OXY(すなわち、顔面平面)に平行であった面内での垂直あるいは垂直軸OY周りの角度ALPHAだけの回転、つまり、水平軸OXの周りの角度BETAだけの回転の結果とみなされる。
【0124】
図14に示すように、面PLGは当初垂直面OXYに平行であると仮定して、レンズの縁(リム)に固定されているクロスバーは軸OXに沿った向きを向いている。幾何学的パターン701を有している同定要素700の端は、その端A,Bによって同定される。幾何学的パターン701はその端に沿ってその端全体に渡ってに沿って伸びているので、このような幾何学的パターン701の端(ends edge)の端(ends)を考慮することで同じ結果を得ることができる。端(ends)の長手方向が対応するクロスバーの長手方向に対して30°の角度THETAを形成することを想起させる。
【0125】
そこで、装着状態で、面PLGと同じように、端が端A,Bの部位によって表されている端が垂直軸OYの周りを角度ALPHAだけ回転して、水平軸OXの周りを角度BETAだけ回転するとみなされる。
【0126】
図3に示した第一の実施態様のように、画像撮影手段は、装着者の頭に装着されたフレームに固定された位置同定システム200の画像を撮影する。この画像撮影は、ここでは面OXYに平行であると考えられる画像撮影面PCI内で実行される。
【0127】
角度ALPHA,BETAは、撮影画像を使用して以下のように計測される。プロセッサ計測システム93は、スケール因子を考慮して、撮影画像内で、水平軸OX上の部位ABの射影の長さLNを計測し、垂直軸OY上の部位ABの射影の長さLMを計測する(図15)。第一の実施態様のように、ホルダーバーは撮影距離および撮影手段のレンズの焦点の長さに関連したスケール因子を計測するのに使用される。
【0128】
射影の長さLN,LMから角度ALPHA,BATAを決定することができる、方程式を含む詳細な計算を以下に記載する。
【0129】
上述したように、撮影意画像は、OXY面への部位ABの射影を与える。計算を簡単にするために、当初、すなわち、ALPHA、BETAだけの如何なる回転をもする前、端Aは軸OX上にあり、端Bは軸OZ上にあると仮定する。すると、点A,Bの座標は次のようになる。
A(L×COS(THETA),0,0)
および、
B(0,0,L×SIN(THETA))
【0130】
レファレンスのOXYフレームにおいて、軸OXの周りを角度BETAだけの回転に続いて、軸OYの周りを角度ALPHAだけの回転を可能とする回転マトリックスMABは以下のように与えられる。
COS(ALPHA) 0 -SIN(ALPHA)
-SIN(ALPHA)×SIN(BETA) COS(BETA) -SIN(BETA)×COS(ALPHA)
-SIN(ALPHA) COS(BETA) COS(ALPHA)×COS(BETA)
【0131】
この行列を部位ABの点A,Bの座標に作用させると、装着状態の部位ABの点A’,B’の座標が得られる
A’=(L×COS(THETA)×COS(ALPHA)),
−L×COS(THETA)×SIN(ALPHA)×SIN(BETA),
−L×COS(THETA)×COS(BETA)×SIN(ALPHA)
および、
B’=( −L×SIN(THETA)×SIN(ALPHA)),
−L×SIN(THETA)×SIN(BETA)×COS(ALPHA),
L×SIN(THETA)×COS(ALPHA)×COS(BETA)
最初の点A’,B’に対する2つの座標をとって、射影の長さLM、LNおよび角度ALPHA、BETA間に以下の関係式を導出できる。
LN=L×COS(THETA−ALPHA)
および、
LM=L×SIN(BETA)×SIN(THETA−ALPHA)
故に、以下の関係式を使って、ALPHAおよびBETAを導出することができる。
ALPHA=ARCCOS(NL/L)+THETA
および
BETA=ARCSIN(ML/L/SIN(THETA−ALPHA))
【0132】
プロセッサシステムは、レファレンスのOXYZフレームにおける座標(0,0,1)を持つベクトルOZに回転行列MABを、当初すなわち如何なる回転にも先立ってと考えられるとき、すなわち、面OXYに平行とき、取付交差点で面PLGに垂直なベクトルに作用させる。これにより、面PLGに垂直な求めるベクトルVABを得られる。ここで面PLGは角度ALPHAだけBETAだけ2回転する、OXYZレファレンスフレームにおいて、このベクトルVABは以下の成分を有している。
VAB=(−SIN(−THETA)),
−SIN(BETA)×COS(ALPHA),
COS(ALPHA)×COS(BETA)
【0133】
左補正レンズの向きは、装着時に面PLGに垂直な上記の計算されたベクトルVABからこのように決定される。
【0134】
右補正レンズの向きは、同様に、装着時に取付交差点で面PLGに垂直なベクトルからこのように決定される。
【0135】
第一実施態様のように、1つあるいは2つのプリズムによって瞳孔の画像の屈折を計測することで、各々の眼と対応するレンズとの間の距離は決定される。
【0136】
設計製造されるべき各々の補正レンズの向きと対応する眼からの距離が一旦決定されると、各々のレンズの装着者の、特に、対応する眼のレファレンスのフレームに対するレファレンスのフレームの配置がわかる。
【0137】
プロセッサシステムは、また、瞳孔間距離、瞳孔間半距離、各々の瞳孔の高さ、および、フレームのリムの幅と長さなどの屈折率傾斜分布パラメータとして既知である幾何学的形態学的パラメータを決定を行う。
【0138】
さらに、第一の実施態様に関しては、面PLGに関連する角度ALPHAの決定された値が面PLDに関連する角度ALPHAの決定された値と異なるとき、フレームが対称的であると仮定すれば、装着者の頭は軸OYの周りに所定の姿勢角APIVだけ回転していると導出される。上述のように、この姿勢角は、これら2つの角度ALPHAの計測値の差に比例するとして決定され、撮影画像上で計測された長さは決定された姿勢角の関数として再計測される。より正確な角度ALPHA、および、角度BETAの値を得るために、撮影画像に対して行われる計測をより正確にするために、1回あるいはそれ以上の繰返し計算を実行することも可能である。
【0139】
図12,13に示されるように、円形のベース601にしっかりと固定されて、このベースに対して垂直方向を向いているアンテナ600あるいはスティックを備えることもできる。ベースは、ホルダーバー290の撮影手段90に面して幾何学的パターン293を有している端の中心に配置されている。この結果、アンテナは実質的に水平面PH内にある。
【0140】
画像撮影が顔面平面OXYに対して正確に平行な面内で行われ、かつ、フレームが対称であると仮定して、アンテナの端は、画像の中で(すなわち、射影の中に)ベースの円形面の中心に位置している。画像撮影が顔面平面OXYに対して平行ではない面内で行われ、又は、フレームが非対称であると仮定して、アンテナの端は、ベースの円形面の中心に対して水平方向にオフセットしている。次に、プロセッサシステムは、アンテナの端の計測されたオフセット距離として作用して頭の姿勢角APIV、又は、フレームの左右の非対称性を決定する。プロセッサシステムは、適当に、レンズの回転角ALPHAの計測値を考慮して姿勢角および2つのレンズの非対称度の値を正確に決定することもできる。レンズの回転角ALPHAおよび装着者の頭の姿勢角の正確な値を得るためにするために繰返し計算の関数を多くすることもできる。
【0141】
画像に施された計測は、こうして、上記のように決定された角度の値の関数として補正される。
【0142】
対称なフレームの場合には、顔面平面上への射影においてアンテナの端とベースの中心との間にオフセットがないことを確認して頭の姿勢角をゼロにすることで、画像を撮影する前に、アンテナは装着者の頭の位置を正確に決定するのに使用できる。
【0143】
ホルダーバー290は、軸OXが正確に水平面に収まるように撮影画像を方向付けることにも使用できる。撮影画像の水平方向に対して、軸OXの向きであるホルダーバー290の長手方向の計測した角度がゼロでない角度であった場合、プロッセサシステムは、軸OXを水平方向に再び向けるために、反対方向に同じ角度だけ回転させる。
【0144】
本発明は、記載あるいは図示された実施態様への限定ではなく、当業者であれば、本発明の思想に従った変形態様を考え得るものである。
【0145】
ひとつの変形態様において、地球のレファレンスのフレームである水平面PHと平行でないフランクフォルト面の向きを操作する装置を設計製造することができる。そうすると、垂直方向が地球のレファレンスのフレームにではなく装着者に対して決定されると仮定すれば、同じ方法を実行することで上述の第一、第二の実施態様で可能となる。換言すれば、このとき、垂直方向は矢状面PSAGに含まれ装着者の主凝視軸に垂直方向として定義される。垂直方向に垂直な水平面は、フランクフォルト面に一致する面として定義される。
【0146】
上述の第一、第二の実施態様、および、変形態様で使用される方法は、ピアスタイプの眼鏡にも適用することができる。このような状況下では、各々のクロスバーは対応するレンズに直接固定されている。上述したリム(形状、向き)に関して実行される計測の計算は、ピアスタイプのフレームに取付けられたレンズに関して実行される。変形態様では、リムのあるタイプのフレームでは、レンズのないフレームを使用してそれらの方法を実行することが可能である。このような状況下では、プリズムロッドはフレームのリムを支えている各々のリムが取付交差点を貫通する全体的な平均面を定義することも可能である。第一、第二の実施例に上述の方法を実行して面の向きを決定することができる。
【0147】
もう一方のレンズ用のレファレンスのフレームの構成が フレームのそれに対して対称となる平面(フレームの対称面)に対して系統的に導出できると仮定すれば、縁のあるタイプのフレームの場合、右あるいは左のひとつのプレゼンレンズで足りる。このような状況においては、可能な姿勢角を決定するために、2つの眼に関連する2つの同定要素を保持することが可能である。頭が本当にまっすぐであってフレームの対称面が矢状面と一致すると仮定すれば、ただ1つの眼に関連するただ1つの同定要素とすることも可能である。
【0148】
ひとつの変形態様では、レンズとこれに対応する眼の間の距離を計算するためにただ1つのプリズムを使用し、プリズムの底の端に現れるグラジュエーションを使用して眼で、あるいは、物指しで手動で計測して、オフセット距離を計測することができる。
【技術分野】
【0001】
本発明は、将来眼鏡をかける人が選択したフレームに装着する個人用の補正レンズの光学的製造を目的にして、将来眼鏡をかける人の幾何学的形態学的(geometrico-morphological)に計測に関し、より具体的には、眼鏡をかけた状態において眼鏡用の補正レンズの将来眼鏡をかける人の頭に対する少なくともひとつの向きの成分を決定する装置及び方法にも関する。
【背景技術】
【0002】
眼鏡補正レンズの光学的な設計製造において、選択したフレームで眼鏡をかける人に合った個人専用の光学設計をするに際して使用される個々専用の幾何学的形態学的パラメータを可能な限り最適な計測することが現在望まれている。このようなパラメータは、具体的には、眼鏡装着時に眼鏡をかける人の頭に対するレンズの3次元な配置情報を含んでいる。このような3次元な配置情報は、(1)眼鏡をかける人の対応する眼に対するレンズの向き、及び、(2)レンズと眼鏡をかける人(眼鏡装着者)の対応する眼の間の距離、によって決定されている。
【0003】
補正レンズの装着時の三次元的な向きを決定するために、フレームのフレームを包み込む曲がりに全体として対応する水平面内の第一角を計測して、レンズが垂直面と共に形成する所謂“装用時前傾角(pantoscopic angle)”にほぼ対応する、垂直面内の第二角を計測することが知られている。
【0004】
そのような計測を行うために、フレームが選択された後、眼鏡技師は眼鏡をかける人の鼻に眼鏡をかける。眼鏡は眼鏡をかける人によって選択されたフレームとフレームのリムに装着された補正していないレンズからなっている。
【0005】
各々のレンズと眼鏡をかける人のレンズに対応する眼との間の距離を計測するために、眼鏡技師は、眼鏡をかける人のプロファイルを観察して、計測値を透けて見える物差しを使用して手動で評価する。同様に、装用時前傾角を計測するために、眼鏡技師は、目盛が振られた分度器を使用して手動で計測値を評価して、レンズの主面と垂直面との間の角度を決定できる。
【0006】
フレームの各々のリムの内側の輪郭から読み取れるように特別に製造された装置を使用して、フレームのフレームを包み込む曲がり角は計測することができる。しかしながら、このようなフレームを計測する装置は高価であり、また、使用が複雑である。この角(角度)をより簡便に計測するために、フレームのアームとリムを分度器のように目盛りを付されたプレートの上に置く方法が知られている。この目盛りによって近似的に水平面内に形成される、ノーズブリッジにほぼ接する(結果的に、フレームの垂直対称面に垂直な)レファレンスの水平線にレンズをトレースすることによって角度を計測して評価することができる。
【0007】
眼鏡技師は、眼鏡をかける人の形態に関係する、この他に2つのパラメータ、すなわち、2つの瞳孔間距離(pupillary distance)あるいは2つの瞳孔間の半分の距離(瞳孔間半距離(two pupillary halfdistance))、及び、フレームに対する高さ、も計測する。2つの瞳孔間の距離、あるいは、2つの瞳孔間の半分の距離を計測するため、定規(物差)を使用することが最も普通に行われている。瞳孔計として知られている特別な装置を使用することもできる。フレームに対する瞳孔の高さを計測するために、眼鏡技師は、通常、レンズの前面に配置された物差を使用してフレーム上のレファレンス点で瞳孔の位置の間の距離を計測する。
【0008】
このように、上述の幾何学的形態学的なパラメータの計測では多くの異なる道具を使用する必要がある。そのため、眼鏡技師は、眼鏡技師にも眼鏡をかける人にも厄介であって費用が掛かることとなる多くの操作をする必要がある。多くの操作は誤操作の原因となり、少なくとも、計測精度を低めることとなる。フレームの上に置く定規あるいは分度器を使用して計測値を手動でかつ近似的に読み取ることによって、しばしば計測精度を低めることとなる。
【0009】
曲がり角あるいは装用時前傾角から各々の補正レンズの向きを決定することは信頼性にかけることも知られている。特に、これら2つの角度にしたがった回転を組合せてレンズの向きを決定すると、この組合せの程度によってレンズの向きに影響することとなる。
【発明の概要】
【0010】
本発明の目的は、フレームに装着される個人専用の眼鏡用補正レンズを製造するために個々の幾何学的形態学的パラメータを決定する操作を、簡便化し、迅速性、正確性、利便性を向上し、かつ、受け入れられる程度のものとする。
【0011】
この目的のために、本発明は、眼鏡を装着した状態で、将来眼鏡をかけることになる人の頭に対する眼鏡用補正レンズの少なくともひとつの向きの成分を決定する方法を提供する。その方法は、
・フレーム又はフレームに装着したレンズに位置同定システム(位置同定システムは、少なくともひとつの既知の幾何学的特性を有する、少なくともひとつの同定要素を具備する)を取付ける工程と、
・画像撮影装置によって同定要素を顔の垂直面内の2次元で撮影する撮影工程と、
・同定要素の撮影された画像を加工して同定要素の既知の幾何学的特性に依存する幾何学的特性を計測する工程と、及び、
・同定要素の撮影された画像の幾何学的特性の計測値を既知の同定要素の幾何学的特性と比較して、レンズの向きの少なくともひとつの成分を計算する工程とを
を含む。
【0012】
位置同定システムは、少なくとも1つの水平同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段を具備し、水平同定要素は、眼鏡をかける人の頭に対するフレームのリムあるいはレンズの(ほぼ垂直な軸の回りの)向きの、撮影された画像(撮影画像)の計測された幾何学的特性が水平成分に依存するように配置されている。少なくとも1つの眼鏡をかける人の頭に対する補正レンズの向きの水平成分は上述の比較にしたがった関数として計算される。
【0013】
本発明は、また、この方法を実装する装置も提供する。
【0014】
設計製造される補正レンズの向きは、画像処理によって装着した状態で決定されるので、眼鏡を装着する人あるいは装着された視覚装置に接触せず、眼鏡技師による最低限の操作で、計測を可能にする。眼鏡技師は、単に、位置同定システムをフレーム上に置いて眼鏡をかける人に装着されたアセンブリの像を撮影するだけでよい。
【0015】
さらに、装置は、限られた数の道具を使用し、ただひとつの撮影された画像に基づいて、様々な幾何学的形態学的パラメータを計測することができる。これにより、幾何学的形態学的パラメータをより迅速、より信頼性高く、そして、より再現性の高い計測することができる。
【0016】
計測された同定要素の撮影された画像の幾何学的特性を既知の同定要素の撮影された画像の幾何学的特性との比較値が所望のレンズの向きの成分を表しており、計算することができる。
【0017】
補正レンズの向きの水平成分は、フレームのリムあるいは(すなわち)レンズの向きの水平成分に依存する。フレーム上の水平同定要素を配置することにより、補正レンズの向きの水平成分を決定することができる。
【0018】
本発明の別の側面として、
・フレームの2つのリムの一方あるいは2つのフレームに嵌め込まれた補正レンズの一方に直接的あるいは間接的に取付けられる第一の水平同定要素、フレームのもう一方のリムの1つあるいはフレームに嵌め込まれたもう一方の補正レンズに直接的あるいは間接的に取付けられる第二の水平同定要素の、少なくとも2つの水平同定要素を具備する、位置同定システム、
・顔面平面(facial plane)内の水平同定要素の2次元画像を撮影する工程を含む、撮影工程、
・撮影した画像を処理してその画像から各々の同定要素の(対応する同定要素の既知の幾何学的特性に依存する)幾何学的特性を計測する、処理工程、及び、
水平同定要素を撮影した画像の幾何学的特性の計測値と、対応する水平同定要素の既知の幾何学的特性とを比較して、各々補正レンズの将来眼鏡をかける人の頭に対する向きの少なくとも1つの水平成分を比較の関数として計算する、比較工程、
を提供するものであり、有利な効果が得られる。
【0019】
2つの水平同定要素を使用することによって、2つの補正レンズあるいはフレームの2つのリムの向きの水平成分を決定することが可能になり、補正レンズの向きの水平成分を正確に決定する。
【0020】
本発明の別の有利な効果によれば、撮影装置に対する両眼の二等分線の向きの水平成分に対応する姿勢角度は、計測された水平同定要素の撮影された画像の幾何学的特性を既知の幾何学的特性との比較の関数として計算できる。
【0021】
このように、計測された水平同定要素の撮影された画像の幾何学的特性間の差に基づいて、垂直軸からの頭のピボット回転角が決定される。姿勢角として知られているピボット回転角を決定することにより、計測値を較正できる。
【0022】
本発明の別の有利な特徴によれば、位置同定システムは、少なくとも1つの垂直同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段(取付手段)を具備し、垂直同定要素は、眼鏡をかける人の頭に対するフレームのリムあるいはレンズの(眼鏡をかける人を前後に貫きほぼ水平の矢状面に垂直な軸の回りの)向きの、撮影された画像の計測された幾何学的特性が垂直成分に依存するように配置されている。少なくとも1つの眼鏡をかける人の頭に対する補正レンズの向きの垂直成分は上述の比較にしたがった関数として計算される。
【0023】
本発明の別の特徴によれば、位置同定システムは、少なくとも1つの垂直同定要素と当該要素を直接的あるいは間接的にリムあるいはフレームに嵌め込まれたレンズに取付ける手段を具備し、垂直同定要素は、比較値が矢状面(sagittal plane)内のフレームの向きの垂直成分になるように配置されており、求めるべき向きの成分は補正レンズの向きの垂直成分を含んでいる。
【0024】
本発明の別の有利な特徴によれば、フレームに嵌め込まれた各々のレンズと対応する眼との間の距離が計測され、眼鏡を装着する人の頭に対する配置を表す少なくとも1つのパラメータがこの距離の関数として計算される。
【0025】
本発明の別の有利な特徴によれば、画像撮影手段と位置同定システムとの間の距離が計測される。この距離によって撮影された画像のスケール因子と無限遠での2つの眼の瞳孔間距離を計算することが可能となる。
【0026】
本発明の別の有利な特徴によれば、スケール因子を使用して、瞳孔間距離、瞳孔間半距離、各々の補正レンズの幅と高さ、及び、各々の瞳孔の高さのうち、少なくとも1つの個人専用の特性が撮影された画像から計測される。
【0027】
これらのパラメータは、幾何学的形態学的パラメータであって、補正レンズを設計製造する際、レンズに正確に(たとえば、屈折率などの)インデックスの傾斜をつけることを可能にする。
【0028】
本発明の別の有利な特徴によれば、瞳孔間距離、瞳孔間半距離、及び、各々の補正レンズの幅と高さの撮影された画像から得られる計測値は姿勢角の計測値の関数として補正され、各々のレンズの高さ用及び各々の瞳孔の高さ用の値は向きの計算値の垂直成分の関数として補正される。
【0029】
本発明の別の有利な特徴によれば、眼鏡装着者が無限遠方を見ている状態の瞳孔間距離又は瞳孔間半距離が計算される。
【0030】
本発明の別の有利な特徴によれば、瞳孔間距離又は瞳孔間半距離は、画像撮影手段と位置同定システムとの距離の関数として計算される。
【0031】
本発明の別の有利な特徴によれば、眼鏡装着者の2つの眼のうちの1つと関連する少なくとも1つのプリズム効果を有する光学部材、そのプリズム効果の方向に平行な端部を有して、位置同定システムに対してほぼ垂直に移動するように取り付けられて、対面して見るとその端部が瞳孔部分の像をオフセットするように眼の瞳孔を交差する、計測位置にい位置することができる部材を具備し、プロセッサ手段がプリズム効果を有する光学部材によって瞳孔のオフセット部分の像に応じてフレームに嵌め込んだレンズと対応する眼との間の距離を導出するように設計されている。着目している眼に対して、この装置は、ただ1つのプリズム効果を有する光学部材を有している。
【0032】
本発明の別の有利な特徴によれば、弾性戻りあるいは重力によってレンズに対してプリズム効果を有する光学部材を押し付ける手段(押付手段)を具備している。
【0033】
本発明の別の有利な特徴によれば、フレームあるいはレンズの向きを表す、少なくとも1つの既知の幾何学的特性を持った同定要素のために、締付手段によってシステムはフレーム上をほぼ垂直でありフレームあるいはレンズの中間面内に含まれる軸の周りに傾斜することができる。位置同定システムがフレーム上で水平軸の周りに傾斜するように製造されているとき、フレームあるいはレンズの向きの垂直成分を同定することが可能となり、眼鏡補正レンズの向きの垂直成分が製造される。
【0034】
位置同定システムをレンズあるいはフレームに対して傾け戻す弾性手段あるいは重力返り手段が有効に具備されている。これらの戻り手段(返り手段)によって位置同定システムは傾斜して設計製造すべき眼鏡補正レンズの向きの垂直成分を正確に決定することができる配置をとることができる。
【図面の簡単な説明】
【0035】
下記の限定ではなく例示としての実施態様の図を参照した以下の記載にて、発明がどこに存在しどのように実施されるかを明確に理解することが可能になる。
【0036】
【図1】図1は、本実施態様の眼鏡の斜視図である。
【図2】図2は、位置同定システムの斜視図である。
【図3】図3は、本実施態様の眼鏡、及び、位置同定システムの前面概略図である。
【図4】図4は、レンズと対応する眼との間の距離決定手段の図である。
【図5】図5は、本実施態様の眼鏡上に固定された位置を同定する図2のシステム、及び、プロセッサ及び計算システムと通信する画像撮影手段の斜視図である。
【図6】図6は、本実施態様の眼鏡を装着した眼鏡装着者の頭がまっすぐ前を向いているときの図である。
【図7】図7は、本実施態様の眼鏡を装着した眼鏡装着者の頭がまっすぐ前の方向からある角度をなしているときの平面図である。
【図8】図8は、レンズを装着した本実施態様の眼鏡のフレームの平面図である。
【図9】図9は、位置同定システムと画像撮影手段の原理を示す図である。
【図10】図10は、ひとつの変形態様における、レンズと対応する眼との間の距離決定手段の図である。
【図11】図11は、図10の距離決定手段及び眼鏡装着者の対応する眼の前面図である。
【図12】図12は、ひとつの変形態様における、位置同定システムの概略平面図である。
【図13】図13は、ひとつの変形態様における、図12の位置同定システムに取付けられたアンテナの図である。
【図14】図14は、眼鏡装着者に関連するレファレンスフレームの概略図であり、フレーム上に固定する前の、システムの位置同定要素の部位を示している。
【図15】図15は、フレーム上に固定した後の、図14のシステムの位置同定要素の部位の前面投影概略図である。
【発明を実施するための形態】
【0037】
以下の記載において、眼鏡のフレーム10に取付けられることになる眼鏡レンズ(図示しない)の各々を補正するためのレファレンスのフレームの配置は、眼鏡が装着された状態において、眼鏡装着者に関連してかつ眼鏡装着者の眼に対するレファレンスのあるフレーム内にて決定される。眼鏡装着者のレファレンスのあるフレームに対する、眼鏡レンズの各々を補正するためのレファレンスのフレームの配置は、眼鏡装着者のレファレンスのフレームに対するレンズのレファレンスのフレームの関数として、レンズの一方若しくはもう一方の光学的に有用な面を形状計測する、又は、レンズの屈折率の傾斜を計測することによる補正レンズの個人用の設計製造方法を実行することで使用に供するように決定される。
【0038】
レファレンスの地球フレーム、たとえば、眼鏡技師の事務所の地球フレームが使用される。レファレンスの地球フレームは、2つの互いに垂直な軸H1、H2構成される水平面PH、及び、垂直方向Vによって決定される。第一垂直面PV1は軸Vと軸H1によって定義される。第二垂直面PV2は軸Vと軸H2によって定義される。
【0039】
眼鏡装着者は頭をまっすぐ前に向けて立ってあるいは座っている、すなわち、装着者の頭に対応するフランクフォルト面(Frankfort plane)PFは、ほぼ水平である。図6に示すように、フランクフォルト面PFは、底の軌道点ORと装着者の左側の部位POを通過する平面として定義される。装着者の左側の部位POは、耳点(tragion)に対応する耳道の頭蓋骨の最も高い箇所である。眼鏡装着者の凝視軸は、主凝視軸、すなわち、装着者がまっすぐ前の水平線を見ているときのものであり、別の言い方では、装着者は最も楽な直立姿勢をとっているときのものであるとも言える。
【0040】
矢状面PSAGは、2つの眼OGとODとの間の眼と眼の間の二等分面AOを含む垂直面として定義される。眼と眼の間の二等分面AOは、2つの眼の回転CROGと回転CRODの中心によって定義される部位の中間を通過し、フランクフォルト面PFに平行な軸である。垂直眼面PVOもまた2つの眼の回転CROGと回転CROD中心間をつなぐ垂直面として定義される。
【0041】
各々の補正レンズのレファレンスの配置は、以下によって決定される。
・ フレームに取付けるための、対応する装着者の眼に対する、各々の補正レンズの向き(方向)
・ 装着した状態で、矢状面PSAGの水平方向(以下に定義される軸Zの方向)に沿ってのレンズとレンズに対応する装着者の眼との間の距離
【0042】
レンズの向きは、取付交差点でのレンズに接する平面に垂直なベクトルの成分によって与えられる。この取付交差点は、レンズは正確に光学的補正として機能するレンズが設計製造されるように、眼の瞳孔に位置を合わせて配置されるべきレンズ上の点に対応する。レンズの向きの垂直成分は、矢状面への投影された顔面平面に対して、軸あるいはレンズの面に垂直なベクトルによって形成される角度に一致する。レンズの向きの水平成分もまた、フランクフォルト面への射影として、顔面平面に対して、軸あるいはレンズの面に垂直なベクトルによって形成される角度に一致するものと定義される。
【0043】
各々の対応するレンズのレファレンスのフレームは、装着者とフレームに関する幾何学的形態学的パラメータを決定する一方で、設計製造される補正レンズの位置を占め、かつ、販売目的あるいは計測目的のフレームに装着されたレンズ100、101の各々に対してレファレンスのフレームの配置を決定することによって得ることができる。
【0044】
図5に、眼鏡をかけている人(眼鏡装着者)の個別の幾何学的形態学的パラメータを決定する装置を示している。個別の幾何学的形態学的パラメータは、特に、眼鏡装着者のレファレンスのフレームに対して設計製造される各々の補正レンズのレファレンスのフレームの配置、及び、以下に具体的に説明する幾何学的形態学的パラメータを含んでいる。
【0045】
この装置は、フレーム10に取付ける位置同定システム20、および、装着状態でフレーム10に取付けられた位置同定システム20の画像を撮影する撮影手段90を備えており、画像は画像撮影面PCI内で撮影される。撮影手段90は、その画像に処理を施すプロセッサと計測計算システム93に接続されている。
【0046】
眼鏡は、(補正されていない)レンズ100、101と共に、装着者が選択したフレーム10を備えている。図示した例においては、眼鏡はリムを有している、すなわち、レンズはフレーム10のリム11、12に装着されている。変形態様では、ピアスタイプの眼鏡、すなわち、レンズが貫通されたものでもよく、各々のレンズはレンズに付属するノーズブリッジのひとつの端およびレンズに付属するアームのひとつの端で保持されている。ブリッジとアームは貫通孔でつなげられている。
【0047】
図1および図2に示されているように、位置同定システム20は、実質的に一直線上にあって同じ平面内にあって、かつ、眼鏡を装着した状態で実質的に垂直なヒンジ軸A1を有するヒンジ29でつながれた2つのクロスバー23、24を持つ、ヒンジ付のフレームを備えている。
【0048】
各々のクロスバー23、24は、ここではクランプとして示されている締付部材25、26、27、28を備えている。これらのクランプは、各々のクロスバー23、24をフレーム(図3)のリム11、12に対応する、眼鏡がピアスタイプの場合には、対応するレンズに対応する、ほぼ水平上部でピボット回転できる状態で締付けることができる。
【0049】
各々のクロスバー23、24は、所定の厚さを持ち、かつ、前方の画像撮影面PCIに向かって突出するとき、幾何学パターン71、81の幾何学的配置が同定要素70、80の向きの水平成分(水平方向成分)を表すように設計製造された幾何学パターン71、81を表している端を持った三角形板の同定要素70、80によって覆い被されている。本発明の向きの水平成分(水平方向成分)は、同定要素の長手方向とフランクフォルト面PFに投影された顔面平面PVOとの間の角度によって定義される。同様に、同定要素の向きの垂直成分(垂直方向成分)は、同定要素の長手方向が矢状面PSAGに投影された顔面平面PVOに対してなす角度によって定義される。
【0050】
この例では、幾何学的なパターンは、交互の濃い色のストライプと薄い色のストライプによって構成されて所定の間隔を持った繰返しモチーフからなっており、十分なコントラストを提供している。幾何学パターン71、81のモチーフは、水平同定要素70、80に対応する端の長手方向に伸延している。その結果、この例では、装着状態において、各々の濃い色のストライプは実質的に垂直である。
【0051】
最初は、幾何学パターン71、81を有する端が前から見え、次に、幾何学パターンが伸延する方向(すなわち、対応する端の長手方向)は水平面PH内でクロスバー23、24の長手方向(すなわち、締付けクランプを貫通する直線)に対してほぼ30°の角度THETAをなすように、各々の水平同定要素70、80は、対応するクロスバー23、24に締付けられている。
【0052】
2つの水平同定要素70、80は、2つの水平同定要素70、80と機械的に関連している中間同定部材190によって相互に連結して、2つの水平同定要素70、80の間にある垂直対称面に対して固定されて、かつ、フレームの対称面PSに実質的に一致する(フレーム自身は装着者の矢状面PSAGに実質的に一致する)位置を定常的に保持している。以下で詳細に説明するように、この中間の同定要素は、画像撮影面PCIへ射影された画像撮影手段90から見て、画像を表す既知の幾何学パターンを有しているので、同定要素70、80と組み合わせることによって同定システム20の3次元で向きと位置を同定することが可能となる。
【0053】
具体的には、この中間同定部材190は、対称面PSに実質的に垂直(結果として、矢状面PSAGに垂直)の長手方向にあるホルダーバーによって構成されている。ホルダーバー190に細長い形状の2つのスロット191、192が形成されて、バーの長手方向に向いている。これら2つのスロット191、192は、同定要素70、80の上面に取付けられている2つの案内スタッド195、196を受ける。そして、各々の同定要素70、80は、ホルダーバー190に対してバーの長手方向に横滑りできるようになる。スタッド195、196は、スロットに沿った同定要素70、80の動きを案内する。
【0054】
同定要素70、80のホルダーバー190に対するこの横滑り動作は、ピボット回転軸A1の周りのピボット回転動作と組み合わされて、クロスバー23、24でリム11、12又はフレーム10のレンズを水平方向に力をかけずに押して、リム11、12に力をかけることなく水平同定要素70、80を締付けることができる。
【0055】
ホルダーバー190は、画像撮影手段90に面する端で、互いに所定の間隔を置いている濃い色のストライプから構成される幾何学的パターン193も備えている。いかに説明するように、これらの濃い色のストライプは位置同定システム20と画像撮影手段90との間の距離を計測計算するのに使用することができるので、撮影画像のスケール因子を決定することができる。
【0056】
位置同定システム20をフレームの対称面PS上でセンタリングして、ノーズブリッジ15を軸A1上でセンタリングする、センタリング手段も備えている。
【0057】
位置同定システム20は、所定の厚さを持った三角板から構成され、かつ、レンズ100、101に関連する2つの水平同定要素70、80の平均面に実質的に垂直な面内に伸びる、垂直同定要素60も備えている。垂直同定要素60は、画像撮影手段90に向かって面している、幾何学的パターン61をそのひとつの端に備えている。この幾何学的パターン61は、上述したように、互いに所定の間隔を置いている濃い色のストライプからなり、垂直同定要素60の対応する端の長手方向に伸びる幾何学的なモチーフによって構成されている。この例では、結果として、各々の濃い入りのストライプは実質的に装着した状態に配置され、幾何学的パターン61は実質的に垂直方向に伸びる。
【0058】
垂直同定要素60は、のホルダーバー190の上面に中心で締付けられる。幾何学的パターン61を持つ垂直同定要素60の端は、眼の回転中心CROG、CRODを相互に接続して、かつ、矢状面PSAG内でホルダーバー190の上面に対して法線N90に一定の角度GAMMA(30°)を形成する線に実質的に平行な面内に伸びる(図2)。
【0059】
クロスバー23、24の自由端近傍に、クロスバー23、24に垂直な、2つの互いに平行な支柱21、22を備えている。支柱21、22は、装着時には実質的に垂直である。位置同定システム20がフレームに固定されたとき、支柱21、22は、フレーム10のアーム13、14の近傍で、装着者の左右のこめかみの脇に位置している(図3参照)。
【0060】
2つの水平ロッド37、38は、支柱21、22に沿って横滑りするように取付けられている。もう一方のロッドに向かっている一方のロッドの端で、各々のロッドはプリズムのペア30、40を備えている。プリズムのペア30、40は、それぞれ、互いに対面する傾斜を持つ、プリズムのペア31と32、プリズムのペア41と42から構成されている。図4に示すように、分離線33は、各々のペアの2つのプリズムの間にある。2つのプリズムは光線を水平方向H1あるいは軸OXに沿って同じ量だけ反対方向に屈折する。プリズムのペア30、40は、以下に説明するように、各々のレンズ100、101と対応する眼OD、OGとの間の距離を計測するようにされている。位置同定システム20の構造は、位置同定システム20が眼鏡装着者の鼻に装着されたフレーム10に固定されたとき、プリズム31、32、41、42は重力の下でレンズ100、101の方へ持って行かれるように設計製造されている。この重力によって持って行かれること(重力による移動)は、位置同定システムを重力中心が前方、すなわち、幾何学的パターンと同じ側に向かう配置するように設計製造することで得ることができる。三角板の前面に重さをかけるあるいは重くすることも可能になる。変形態様においては、プリズムをレンズに押し付けるために、プリズムを備えた支柱21、22に作用する弾性返り手段を備えることもできる。
【0061】
プリズムのペア30、40を支持しているロッド37、38は、位置同定システム20の支柱21、22に対して水平方向に静止している。このように、プリズムは、眼鏡装着者の瞳孔間距離の大きさにかかわらず、眼鏡装着者の瞳孔PG、PDを越えて覆うことができる程度に水平方向に伸延するように設計製造されている。
【0062】
画像撮影手段90は、典型的には、ポータブルデジタルカメラ、または、支柱あるいはスタンドに取り付けられたカメラを備えている。図示された例では、画像撮影手段90は、フレーム10と眼鏡装着者によって装着された位置同定システム20の全体の画像を容易に撮影できるにように高さが調整可能なスタンド91を備えている。
【0063】
画像撮影手段90は、眼鏡装着者が座っている間に画像が撮影できるように設計製造されている。このように、画像撮影手段90は、相対的に小さく、眼鏡装着者が座っている座席に面しているテーブルの上に置くことができる。変形態様では、画像撮影手段90は、眼鏡装着者が立っている間に画像が撮影できるように設計製造されることができる。
【0064】
画像撮影手段90は、好適には、第一に撮影画像から容易に同定できるように角膜反射が得られるようにされ、第二に、発光ダイオードLEDに対して装着者が注意を惹かれるようにされた、既知の位置にある発光ダイオード(LED)92を備える。これによって、撮影画像の処理が容易になる。
【0065】
撮影された画像に作用する、プロセッサ及び計測システム93は、マイクロコンピュータを備えている。マイクロコンピュータには、撮影された画像を処理する処理計測ソフトウェアがインストールされている。変形態様では、プロセッサ及び計測システム93は、第一に、結果を表示するディスプレイ、第二に、その結果を他の装置へ通信する接続手段を備えた、独立のシステムとしてマイクロコンピュータを備えることもできる。独立処理システムと画像撮影手段90を一体とする選択肢もある。
【0066】
上述の決定装置は、装着者のレファレンスのフレームに対する フレームに取り付けられることになる各々の補正レンズ用のレファレンスのフレームの配置を決定するために実装された以下の処理を実行することができる。
【0067】
以下に記載する右目ODに対する方法は、左目OGに対しても有効である。
【0068】
図5に示すように、眼鏡技師は、位置同定システム20が備わった眼鏡のペアを眼鏡装着者の鼻にかける。装着者は頭をまっすぐに向けて座ることも立つこともでき、このとき、フランクフォルト面PFはほぼ水平である。
【0069】
図3に示したように、クロスバー23の2つの固定クランプ25、26は、フレーム10の右側のリム11の上部に取付けられている。同様に、クロスバー24の2つの固定クランプ27、28は、フレーム10の左側のリム12の上部に取付けられている。好適には、固定クランプのペア25と26、27と28は、対応するクロスバー23、24がこれらに固定されているリム11、12の水平方向成分を追跡できるように、お互いにできる限り空間的に離してある。各々のリムの水平方向成分(向きの水平成分)は全体としてフランクフォルト面に射影された矢状面に対するレンズの傾斜に対応する。
【0070】
ホルダーバー190は、2つの水平同定要素70、80が実質的に同一面内に確実に留まるように機能するようにされている。結果として、位置同定システム20がフレーム10に取り付けられたとき、垂直同定要素60は、実際、フレームの対称面内に伸びている(図3、5参照)。
【0071】
適当な高さに調整されたロッド37、38によって支持されているプリズムのペア30、40の各々は、眼鏡技師によって、対応する眼の瞳孔PG、PDに揃えて置かれている。より正確には、眼鏡装着者を前から見て、眼鏡技師は、プリズムのペア30、40の各々の分離線33が対応する瞳孔PG、PDの中心を通過するようにする(図4)。
【0072】
位置同定システム20は、関連する眼の瞳孔PG、PDに揃えて置かれた各々のプリズムのペア30、40が、重力の下で対応するレンズ100、101の前面に対面するように持って行かれるように設計製造されている。プリズムのペア30、40は、2つの瞳孔の中心を貫通する軸に実質的に平行な軸の周りに傾斜している(その結果、矢状面PSAGに実質的に垂直であり、以下に定義される軸Xに平行である)クロスバー23、24によって、重力の下で対応するレンズ100、101に対面するように持って行かれる。このように、固定クランプは、位置同定システム20を傾斜軸の周りに傾斜させることができるヒンジとして機能する。
【0073】
その結果、ホルダーバー190の上面に対する法線N90は、フレーム10の向きの垂直成分を追従する。垂直面PVOに対して、フレームの複数のリムの平均面である矢状面PSAG内の傾斜角に全体として対応する(図6)。
【0074】
固定クランプ25、26がフレーム10のリム11を支持する2つの点、および、プリズムのペア30がレンズ100を支持する点(すなわち、取付交差に対応する点)は、装着時に補正レンズの平均面となるレンズ100の平均面PLDを定義する(図1、3)。同様に、レンズ101の面PLGは、フレーム10のリム12上の固定クランプ27、28の2つの支持点、および、プリズムのペア40がレンズ101を支持する点を貫通する面として定義される。
【0075】
図1に示すように、レファレンスのフレームは、フレームに(結果として、間接的には装着者の頭に)関連して定義され、互いに直交する軸(O,X,Y、Z)と参照番号20として参照されるものを表す。たとえば、レファレンスのフレームの中心Oは、固定クランプ26、27を相互接続する部位の真中である。X軸は水平であり、固定クランプ26、27を通過している。Y軸はフランクフォルト面に垂直であって、この例では垂直である。そして、OYZ平面は垂直であり、矢状面PSAGに、また、対称面PSにも対応している。軸OZは眼の二等分線AOに平行である。OXZ面はフランクフォルト面PSに平行であり、この例では水平である。OXY面は、フレーム垂直面PVMとして参照され、画像撮影面PCIに実質的に平行である。
【0076】
各々のレンズの向きは、レファレンスのフレーム(O,X,Y、Z)において、取付交差点CMG,CMDでレンズに接する面に垂直のベクトルの成分として与えられる。取付交差点は、設計製造されるべきレンズが正確に光学補正関数として機能するように、装着者の目の瞳孔に揃えて置いたレンズの点に対応する。レンズの向きの垂直成分は、矢状面に投影されて、顔面平面に対するレンズの面に垂直な軸あるいはベクトルによって形成される角度に対応する。レンズの向きの水平成分もまた、フランクフォルト面に投影されて顔面平面に対するレンズのフレームに垂直な軸あるいはベクトルによって形成される角度に対応するものとして定義される。
【0077】
面PLG,PLDの向きは、製造されるべき補正レンズの各々の装着者のレファレンスのフレームに対する向きがわかるように決定される必要がある。面PLG,PLDの各々の向きを決定するために、プリズム30、40がレンズ100、101を支持する複数の点を貫通して、かつ、面PLG,PLDに垂直な、軸XLD,XLGの向きは決定される。
【0078】
図8に示すように、軸XLGH、XLDHは、軸XLG、XLDのフランクフォルト面あるいは水平面への射影として定義される。同様に、軸XLVは、軸XLG、XLDの矢状面への射影として定義される(図6)。ここで、軸XLG、XLDの矢状面への双方の射影は、同一の射影軸XLVを与えるものと前提している。変形態様では、2つの軸XLG,XLDの矢状面への射影を区別することが可能である。
【0079】
このように、各々のレンズ100、101の向きの水平成分は、軸XLGH、XLDHと装着者の矢状面PSAGとによって形成される角度AXLGH、AXLDHに対応している。同様に、各々のレンズ100、101の向きの垂直成分は、軸XLVとフランクフォルト面とによって形成される角度AXVに対応している。そして、装着者に対する各々のレンズの向きを決定するためには、さらに、角度AXLGH、AXLDH、AXVを決定する必要がある。
【0080】
軸XLGHと矢状面PSAGとの間に形成される角度AXLDHは、第一に、それぞれ、ノーズブリッジ15、右側のリム13近傍にある、右側のリム11を支持する固定クランプ25、26を通過する直線D1間に水平面PH内に、第二に、フレーム垂直面PVMに形成される角度AMDに実質的に対応している。同様に、角度AXLGHは、第一に、それぞれ、ノーズブリッジ15、左側のリム14近傍にある、左側のリム12を支持する固定クランプ27、29を通過する直線D2間に水平面PH内に、第二に、フレーム垂直面PVM形成される角度AMGに実質的に対応する。このように、各々の角度AXLGH、AXLDHを決定するためには、角度AMG、AMDを決定すれば十分である。
【0081】
同様に、図6に示されているように、角度AXVは、矢状面PSAGへの射影内で第一に、眼OG,ODを通過してレンズの矢状面PSAGに垂直な垂直面PVOの間に、第二に、2つのレンズ100、101(あるいは、フレーム10の2つのリム11、12)の平均面PMCに形成される角度AMVに実質的に等しい。角度AXVを決定するためには、角度AMVを決定すれば十分である。
【0082】
眼鏡技師は、ポータブル画像撮影装置90を装着者の頭に対面するように置いて、画像撮影手段90のスタンド91を調整して、撮影面PCI内で位置同定装置20で覆われた眼鏡を装着している装着者の頭の画像を撮影する。得られた画像は図3の画像に対応する。画像の撮影は典型的には装着者から50cmから120cmの範囲の距離で撮影面PCI内にてなされる。撮影面PCIは、対面している、すなわち、面PVO、PVMに平行である(図5、6)。
【0083】
図2に示すように、角度ARHDは、水平面PHあるいはフランクフォルト面PF内に、第一に、フレーム垂直面PVM、および、第二に、幾何学的パターン71の長手方向の間に形成される角度として定義される。この角度ARHDが変化するとき、黒色のストライプと黒色のストライプの間の空間的間隙も面PVMに平行な画像撮影面PCIへの射影内で変化する。この角度ARHGは、角度AMGと30°である一定の角度THETAの和に等しい。このように、この角度ARHDは、角度AMDと同じように変化する。角度ARHGが角度AMGと30°である一定の角度THETAの和として定義される水平同定要素80に対しても同様のことが成り立つ。
【0084】
プロセッサ計測システム93は、装着された状態で撮影された画像の中の水平同定要素70の幾何学的パタ−ン71の濃い色のストライプ間の空間的間隙を計測する。撮影画像のピクセル(画素)に起因する撮影された画像の測定誤差を制限するために、プロセッサ計測システム93は、ペアのストライプ間の空間的間隙を計測してその空間的間隙の平均値を計算する。その後、角度ARHD及びストライプ間の空間的間隙が知られた幾何学的パタ−ン71用のレファレンスの配置と比較して、システムは装着状態とレファレンス配置との間でのストライプ間の空間的間隙のズレ(差)を決定する。その後、プロセッサ計測システム93は、空間的間隙のズレ(差)の関数として角度ARHDを決定する。そして、角度ARHDに基づいて角度AMDが決定される。
【0085】
ストリップ間の空間的間隙の正確な比較を行うために、プロセッサ計測システムは、撮影画像のスケール因子を考慮する必要がある。スケール因子を知ることによって、ストライプの空間的間隙を比較できるように、撮影画像内の計測されるストライプの空間的間隙と共通因子に対するレファレンスのストライプの空間的間隙の値を減らすことができる。スケール因子は位置同定システムと画像撮影手段との間の距離から決定される。
【0086】
分離距離、レファレンスDは、以下に説明する計算方法によって得ることができる。
【0087】
図9に概略的に示したように、決定装置が上から見られるとき、ホルダーバー190の幾何学的パターン193の長手方向は、光学軸AOPに対する法線NAOPとともに角度ALPHA0を形成する。同様にして、同定要素70、80に対応する幾何学的パターン71、81の各々は、ホルダーバー190の幾何学的パターン193の長手方向とともに角度BETA0を形成する。幾何学的パターン71、81は既知の同一の長さHを持ち、同様に、幾何学的パターン193は既知の長さLを持つことが仮定されている。
【0088】
濃い色のストライプ間の空間的間隙を使用する際、ホルダーバー190の幾何学的パターン193の見かけ上の長さTはレンズ94の焦点面PFOC内で計測される。以下の関係式が成り立つ。
L×COS(ALPHA0)×F/D=T
ここで、Fは、レンズ94の焦点距離、Dは、画像撮影装置90と位置同定システム20に関連するレファレンスのフレームの原点Oとの間の距離である。
【0089】
幾何学的パターン71、81の焦点面PFOC内における見かけ上の長さT1、T2も計測される。以下の関係式が成り立つ。
H×COS(BETA0−ALPHA0)×F/D=T1
および、
H×COS(BETA0+ALPHA0)×F/D=T2
【0090】
次に、2つの見かけ上の長さT1、T2の和をとることによってBETA0の近似値が計算される。すなわち、
T1+T2=2×COS(BETA0)×COS(ALPHA0)×F/D
ここで、ALPHA0がほぼ1であると仮定すると、次式が得られる。
T1+T2=2×COS(BETA0)×H×T/L
この式からBETA0の近似値を導出することができる。
【0091】
次に、これら2つの長さの比KがH×F/Dを削除することで計算される。
K=(COS(BETA0)COS(ALPHA0)+SIN(BETA0)SIN(ALPHA0))/(COS(BETA0)COS(ALPHA0)−SIN(BETA0)SIN(ALPHA0))
KおよびBETA0は既知であるので、以下の関係式を用いてALPHA0は計算することができる。
TAN(ALPHA0)=[(K−1)×COS(BETA0)]/[(K+1)×SIN(BETA0)]
【0092】
このように、F,Lの値が既知であるとし、Tの測定値を用いて距離Dは導出される。
D=L×COS(ALPHA0)×F/T
【0093】
分離距離を直接決定するためにレーザダイオードテレメータを使用することもできる。
【0094】
プロセッサ計測システム93は、装着した状態で撮影画像の中の水平同定要素80の幾何学的パターン81の濃い色のストライプ間の空間的間隙も計測できる。上述のように、撮影画像のピクセルに起因する撮影画像の中の測定誤差を制限するために、プロセッサ計測システム93は、ストライプ間の空間的間隙をペアで計測してその平均値をとる。その後、角度ARHGとストライプ間の空間的間隙が既知である幾何学的パターン81のレファレンス配置と比較して、装着状態のストライプとレファレンス状態のストライプ間の空間的間隙のズレを決定する。ストライプ間の空間的間隙は撮影画像のスケール因子を考慮して比較される。その後、プロセッサ計測システム93は、角度ARHGを上記空間的間隙のズレの関数として決定する。そして、角度AMGは角度ARHGから決定される。
【0095】
図2に示すように、角度ARVは矢状面PSAGへの射影の中に第一にフレーム垂直面PVMと第二に幾何学的パターン61の長手方向との間に形成される角度として決定される。角度ARVが変化するとき、画像撮影面PCIへの射影と同様に、濃い色のストライプ間の空間的間隙も変化する。この角度ARVは、角度AMVと法線N90に対して幾何学的パターン61がなす一定角GAMMA(30°)の和に等しい。このように、角度AMVと同じように、角度ARVは変化する。
【0096】
次に、プロセッサ計測システム93は、撮影画像上で幾何学的パターン61のストライプ間の空間的間隙を計測する。前と同じように、既知の角度ARVと既知のストライプ間の空間的間隙とから構成されるデータペア幾何学的パターン61のレファレンス配置が提供される。撮影画像上でのストライプ間の空間的間隙の計測値とストライプ間の空間的間隙のレファレンスの値を比較して、プロセッサ計測システム93は、空間的間隙のズレを導出する。前と同じように、ストライプ間の空間的間隙は撮影画像のスケール因子を考慮して比較される。その後、プロセッサ計測システムは、空間的間隙のズレの関数として角度ARVを決定する。このように、角度AMVは角度ARVから決定される。
【0097】
このように、プロセッサ計測システムは、フランクフォルト面および矢状面PSAGに対する左右のレンズの軸XLG,XLDの向きを決定する。その結果、装着者のレファレンスのフレームにおける左右のレンズの各々に関連する複数の面の向きが知られる。このようにして、対応する眼に対するフレームに取付ける各々の補正レンズの向きが知られる。
【0098】
レンズ100と眼ODとの間の距離を計測するために、プロセッサ計測システム93は、第一プリズム31によって屈折された瞳孔PDの画像の上部PDSの中心と第二プリズム32によって屈折された瞳孔PDの画像の底部PDIの中心との間の水平方向のオフセットDDを計算する(図4)。
【0099】
このように、プロセッサ計測システム93は、矢状面PSAGからの水平方向の距離を決定する。すなわち、オフセットDDに基づき比例関係を使ってZ軸に沿ってレンズ100と眼ODとの間の距離を決定する。同様に、レンズ101と眼OGとの間の距離は、プリズムペア40を通して見た眼OGの画像の上部と底部との間を計測した水平方向のオフセットDGから決定される。
【0100】
このように、各々のレンズ100、101と対応する眼OD,OGとの間の距離、および、各々のレンズの向きから、装着者の眼に合わせて製造される各々の補正レンズのレファレンスのフレームの配置が導き出される。
【0101】
眼鏡装着者がまっすぐ前を向いている装着状態、すなわち、矢状面PSAGが画像撮影面PCIに垂直である状態において、角度AMGは角度AMDに等しい。
【0102】
角度AMG、AMDが異なる値のとき、装着者の頭は垂直軸の周りに姿勢角APIVだけ回転している。
【0103】
図7に示すように、姿勢角APIVは、2つの眼の間の二等分線AOと画像撮影面PCIに垂直な軸との間に水平面PH内に形成される角度である。
【0104】
角度AMGと角度AMDとの値の差は、姿勢角APIVの値に比例する。そこで、プロセッサ計測システム93は、測定された角度AMGと角度AMDとの値の差の関数として姿勢角APIVの値を計算する。この姿勢角APIVの値は、角度AMGと角度AMDの値を補正する役目を果たす。
【0105】
さらに、改良して光学的に設計製造する個人用のデータとしてより良く機能できるようにするために、レンズを設計製造する際に屈折率の傾斜を改良するのに使用される幾何学的形態学的パラメータが決定される。
【0106】
プロセッサ計測システム93は、スケール因子を考慮して、レンズを覆うリム11、12の幅Bと長さAの寸法を決定するために画像認識を行う。プロセッサ計測システム93は、スケール因子を考慮して、瞳孔PD,PGの中心に位置する分離線34とレンズの最も低い点としてのレファレンス点(参照点)との間の撮影画像の中での距離を計測することによって、対応する眼OG,ODの高さHG、HDを決定するためにも画像認識を用いる。
【0107】
瞳孔間距離PDSを計測するために、プロセッサ計測システム93は、画像認識を使用して各々の眼に対する点N1と点N2との間で画定される部位の中心を決定する(図4)。点N1と点N2は分離線34と屈折した瞳孔の上部と底部の輪郭の画像との間の最も離れた交差する点によって定義される。各々のプリズムペアのプリズムによる屈折は向きは反対で大きさは同じであり、上述したように定義される、点N1と点N2との間で画定される部位の中心は、実際、屈折していない瞳孔の中心に対応する。このようにして得られる、2つの瞳孔PG,PDの中心によって定義される部位によって、瞳孔間距離PDSを得ることができる。ノーズブリッジ15の中心に対する各々の瞳孔PG,PDの中心の水平位置を計測して、瞳孔間半距離PDS1、PDS2を計測することも可能である。
【0108】
この例では、レファレンス収束配置(reference convergence configuration)での、瞳孔間距離PDS、あるいは、瞳孔間半距離PDS1、PDS2が計測される。このレファレンス収束配置では、装着者の眼がしっかりと画像撮影手段、すなわち、LED92のライトを凝視している。そして、プロセッサ計測システムは撮影距離および対応する瞳孔間距離PDS(あるいは、瞳孔間半距離)の計測値の関数として機能して、無限遠を見ているときの瞳孔間距離の値を決定する。
【0109】
当然に、すべての計測はスケール因子を考慮して実行される。
【0110】
以前に計測計算した角度AMD,AMGの関数として、姿勢角APIVの関数として、あるいは、眼OD,OGと対応するレンズ100、101との間の距離の差の関数として計測値を補正することによって、瞳孔間距離、瞳孔間半距離、および、幅の寸法Aの計算値の精度を改善することも可能である。同様に、角度AMVを考慮することによって、高さの寸法H、および、各々の眼の瞳孔の高さHG,HDも改善することができる。
【0111】
クロスバー23、24の長手方向に対する幾何学パターン71、81の長手方向の傾斜は、角度AMG,AMDが変化したとき、ストライプ間の空間間隙の変化を増加するのに使用される。このように、既知のレファレンス配置に対して角度AMG,AMDが変化した結果生じた2つのストライプ間の空間間隙は、より容易に同定することができる。このように、空間間隙の比較は、フレームの各々のリム11、12の、つまり、各々のレンズの向きの水平成分をあらわしており、測定誤差を制限している。
【0112】
法線N90に対する幾何学パターン61の長手方向の傾斜に関しても同様のことがいえる。この傾斜は、角度AMVが変化するときのストリップ間の空間間隙の変化の値を増加する。
【0113】
図10に示したように、変形態様では、1つの眼に対して1つのプリズム31のみを使用することもできる。このとき、その底の端34が分離線として機能する。図11に示したように、底の端34で定義される分離線は、装着者の瞳孔PDの中心を越えた位置にある。瞳孔の上部の画像は距離D3だけ水平方向に屈折され、これに対して、瞳孔の底部の画像は屈折することなく画像撮影手段90によって直接見える。上述したように、距離D3はレンズ100と眼ODとの間の距離を導出するのに使用される。レンズ101と眼OGとの間の距離も同様に導出される。
【0114】
さらに、画像撮影手段90は、眼の底部を直接みることができるので、プロセッサ計測システム93は、スケール因子を考慮して、瞳孔間距離PDSあるいは瞳孔間半距離PDS1、PDS2を撮影画像から直接計測することができる。各々の眼から1つのプリズムを取り除くことで使用される部品数を低減することができ、軽量化が図れる。
【0115】
第二実施態様では、いくつかの第一実施態様の要素(部材)と同じ部材、特に、図2、3に示されている部材を利用する。図12にみられるように、位置同定システム200は、装着者の左眼OGあるいは左レンズに関連する同定要素700、および、装着者の右眼ODあるいは右レンズに関連する同定要素800を備えている。前と同じように、各々の同定要素700、800は、端の長手方向に伸びる幾何学的パターン710,810となる端を有している。前と同じように、同定要素700、800は、各々の幾何学的パターン710,810がほぼ30°である対応するクロスバーの長手方向に対する角度THETAを形成するようにクロスバーに取付けられている。
【0116】
装着状態で2つの同定要素700、800を垂直軸の周りにピボット回転させるための同じようなピボット手段296も備えられている。
【0117】
細長い開口を有する同じようなホルダーバー290も備えられ、同定要素700、800に取付けられている案内スタッド294,295は、ホルダーバー290に沿って動くことができる。この第二実施態様では、第一実施態様にはあった同定要素60は省略されている。
【0118】
第一実施態様においてそうであったように、対応するレンズの縁に配置されたクロスバーは固定手段を備えている。
【0119】
図2,10において第一実施態様で記載したようにプリズム(図示しない)は、同じように各々の眼と対応するレンズとの間の距離を計測するのに使用されている。これらのプリズムは、前と同じように、取付け交差点でレンズに接する面PLG,PLD(図1)を定義できるように取付け交差点でレンズに接触する。これらの面PLG,PLDは、前と同じように、設計製造されるべき補正レンズに取付け交差点で接している面と考えられる。そし故、対応する面PLG,PLDに垂直なベクトルを決定して、設計製造されるべき補正レンズの向きを決定することができる。
【0120】
2の同定要素700、800は、第一実施態様の2つの同定要素70、80と同じ構造をなしているが、その使用のされ方が異なる。第一実施態様では、設計製造されるべき各々の補正レンズの向きは、対応する水平同定要素70、80の画像撮影面内の向きだけからではなく、垂直同定要素60からも決定される。これに対して、第二実施態様では、概略的にいえば、設計製造されるべき各々の補正レンズの向きは、対応する同定要素700、800の画像撮影面内の向きから決定される。
【0121】
第二実施態様では、設計製造されるべき各々の補正レンズの向きの決定方法は、左レンズに関して以下に記載されるが、同様な議論は当然に右レンズにも適用できる。
【0122】
レファレンスのフレームOXYZは第一実施例とまったく同じように定義される。
【0123】
装着時の撮影画像内の面PLGの向きは当初面OXY(すなわち、顔面平面)に平行であった面内での垂直あるいは垂直軸OY周りの角度ALPHAだけの回転、つまり、水平軸OXの周りの角度BETAだけの回転の結果とみなされる。
【0124】
図14に示すように、面PLGは当初垂直面OXYに平行であると仮定して、レンズの縁(リム)に固定されているクロスバーは軸OXに沿った向きを向いている。幾何学的パターン701を有している同定要素700の端は、その端A,Bによって同定される。幾何学的パターン701はその端に沿ってその端全体に渡ってに沿って伸びているので、このような幾何学的パターン701の端(ends edge)の端(ends)を考慮することで同じ結果を得ることができる。端(ends)の長手方向が対応するクロスバーの長手方向に対して30°の角度THETAを形成することを想起させる。
【0125】
そこで、装着状態で、面PLGと同じように、端が端A,Bの部位によって表されている端が垂直軸OYの周りを角度ALPHAだけ回転して、水平軸OXの周りを角度BETAだけ回転するとみなされる。
【0126】
図3に示した第一の実施態様のように、画像撮影手段は、装着者の頭に装着されたフレームに固定された位置同定システム200の画像を撮影する。この画像撮影は、ここでは面OXYに平行であると考えられる画像撮影面PCI内で実行される。
【0127】
角度ALPHA,BETAは、撮影画像を使用して以下のように計測される。プロセッサ計測システム93は、スケール因子を考慮して、撮影画像内で、水平軸OX上の部位ABの射影の長さLNを計測し、垂直軸OY上の部位ABの射影の長さLMを計測する(図15)。第一の実施態様のように、ホルダーバーは撮影距離および撮影手段のレンズの焦点の長さに関連したスケール因子を計測するのに使用される。
【0128】
射影の長さLN,LMから角度ALPHA,BATAを決定することができる、方程式を含む詳細な計算を以下に記載する。
【0129】
上述したように、撮影意画像は、OXY面への部位ABの射影を与える。計算を簡単にするために、当初、すなわち、ALPHA、BETAだけの如何なる回転をもする前、端Aは軸OX上にあり、端Bは軸OZ上にあると仮定する。すると、点A,Bの座標は次のようになる。
A(L×COS(THETA),0,0)
および、
B(0,0,L×SIN(THETA))
【0130】
レファレンスのOXYフレームにおいて、軸OXの周りを角度BETAだけの回転に続いて、軸OYの周りを角度ALPHAだけの回転を可能とする回転マトリックスMABは以下のように与えられる。
COS(ALPHA) 0 -SIN(ALPHA)
-SIN(ALPHA)×SIN(BETA) COS(BETA) -SIN(BETA)×COS(ALPHA)
-SIN(ALPHA) COS(BETA) COS(ALPHA)×COS(BETA)
【0131】
この行列を部位ABの点A,Bの座標に作用させると、装着状態の部位ABの点A’,B’の座標が得られる
A’=(L×COS(THETA)×COS(ALPHA)),
−L×COS(THETA)×SIN(ALPHA)×SIN(BETA),
−L×COS(THETA)×COS(BETA)×SIN(ALPHA)
および、
B’=( −L×SIN(THETA)×SIN(ALPHA)),
−L×SIN(THETA)×SIN(BETA)×COS(ALPHA),
L×SIN(THETA)×COS(ALPHA)×COS(BETA)
最初の点A’,B’に対する2つの座標をとって、射影の長さLM、LNおよび角度ALPHA、BETA間に以下の関係式を導出できる。
LN=L×COS(THETA−ALPHA)
および、
LM=L×SIN(BETA)×SIN(THETA−ALPHA)
故に、以下の関係式を使って、ALPHAおよびBETAを導出することができる。
ALPHA=ARCCOS(NL/L)+THETA
および
BETA=ARCSIN(ML/L/SIN(THETA−ALPHA))
【0132】
プロセッサシステムは、レファレンスのOXYZフレームにおける座標(0,0,1)を持つベクトルOZに回転行列MABを、当初すなわち如何なる回転にも先立ってと考えられるとき、すなわち、面OXYに平行とき、取付交差点で面PLGに垂直なベクトルに作用させる。これにより、面PLGに垂直な求めるベクトルVABを得られる。ここで面PLGは角度ALPHAだけBETAだけ2回転する、OXYZレファレンスフレームにおいて、このベクトルVABは以下の成分を有している。
VAB=(−SIN(−THETA)),
−SIN(BETA)×COS(ALPHA),
COS(ALPHA)×COS(BETA)
【0133】
左補正レンズの向きは、装着時に面PLGに垂直な上記の計算されたベクトルVABからこのように決定される。
【0134】
右補正レンズの向きは、同様に、装着時に取付交差点で面PLGに垂直なベクトルからこのように決定される。
【0135】
第一実施態様のように、1つあるいは2つのプリズムによって瞳孔の画像の屈折を計測することで、各々の眼と対応するレンズとの間の距離は決定される。
【0136】
設計製造されるべき各々の補正レンズの向きと対応する眼からの距離が一旦決定されると、各々のレンズの装着者の、特に、対応する眼のレファレンスのフレームに対するレファレンスのフレームの配置がわかる。
【0137】
プロセッサシステムは、また、瞳孔間距離、瞳孔間半距離、各々の瞳孔の高さ、および、フレームのリムの幅と長さなどの屈折率傾斜分布パラメータとして既知である幾何学的形態学的パラメータを決定を行う。
【0138】
さらに、第一の実施態様に関しては、面PLGに関連する角度ALPHAの決定された値が面PLDに関連する角度ALPHAの決定された値と異なるとき、フレームが対称的であると仮定すれば、装着者の頭は軸OYの周りに所定の姿勢角APIVだけ回転していると導出される。上述のように、この姿勢角は、これら2つの角度ALPHAの計測値の差に比例するとして決定され、撮影画像上で計測された長さは決定された姿勢角の関数として再計測される。より正確な角度ALPHA、および、角度BETAの値を得るために、撮影画像に対して行われる計測をより正確にするために、1回あるいはそれ以上の繰返し計算を実行することも可能である。
【0139】
図12,13に示されるように、円形のベース601にしっかりと固定されて、このベースに対して垂直方向を向いているアンテナ600あるいはスティックを備えることもできる。ベースは、ホルダーバー290の撮影手段90に面して幾何学的パターン293を有している端の中心に配置されている。この結果、アンテナは実質的に水平面PH内にある。
【0140】
画像撮影が顔面平面OXYに対して正確に平行な面内で行われ、かつ、フレームが対称であると仮定して、アンテナの端は、画像の中で(すなわち、射影の中に)ベースの円形面の中心に位置している。画像撮影が顔面平面OXYに対して平行ではない面内で行われ、又は、フレームが非対称であると仮定して、アンテナの端は、ベースの円形面の中心に対して水平方向にオフセットしている。次に、プロセッサシステムは、アンテナの端の計測されたオフセット距離として作用して頭の姿勢角APIV、又は、フレームの左右の非対称性を決定する。プロセッサシステムは、適当に、レンズの回転角ALPHAの計測値を考慮して姿勢角および2つのレンズの非対称度の値を正確に決定することもできる。レンズの回転角ALPHAおよび装着者の頭の姿勢角の正確な値を得るためにするために繰返し計算の関数を多くすることもできる。
【0141】
画像に施された計測は、こうして、上記のように決定された角度の値の関数として補正される。
【0142】
対称なフレームの場合には、顔面平面上への射影においてアンテナの端とベースの中心との間にオフセットがないことを確認して頭の姿勢角をゼロにすることで、画像を撮影する前に、アンテナは装着者の頭の位置を正確に決定するのに使用できる。
【0143】
ホルダーバー290は、軸OXが正確に水平面に収まるように撮影画像を方向付けることにも使用できる。撮影画像の水平方向に対して、軸OXの向きであるホルダーバー290の長手方向の計測した角度がゼロでない角度であった場合、プロッセサシステムは、軸OXを水平方向に再び向けるために、反対方向に同じ角度だけ回転させる。
【0144】
本発明は、記載あるいは図示された実施態様への限定ではなく、当業者であれば、本発明の思想に従った変形態様を考え得るものである。
【0145】
ひとつの変形態様において、地球のレファレンスのフレームである水平面PHと平行でないフランクフォルト面の向きを操作する装置を設計製造することができる。そうすると、垂直方向が地球のレファレンスのフレームにではなく装着者に対して決定されると仮定すれば、同じ方法を実行することで上述の第一、第二の実施態様で可能となる。換言すれば、このとき、垂直方向は矢状面PSAGに含まれ装着者の主凝視軸に垂直方向として定義される。垂直方向に垂直な水平面は、フランクフォルト面に一致する面として定義される。
【0146】
上述の第一、第二の実施態様、および、変形態様で使用される方法は、ピアスタイプの眼鏡にも適用することができる。このような状況下では、各々のクロスバーは対応するレンズに直接固定されている。上述したリム(形状、向き)に関して実行される計測の計算は、ピアスタイプのフレームに取付けられたレンズに関して実行される。変形態様では、リムのあるタイプのフレームでは、レンズのないフレームを使用してそれらの方法を実行することが可能である。このような状況下では、プリズムロッドはフレームのリムを支えている各々のリムが取付交差点を貫通する全体的な平均面を定義することも可能である。第一、第二の実施例に上述の方法を実行して面の向きを決定することができる。
【0147】
もう一方のレンズ用のレファレンスのフレームの構成が フレームのそれに対して対称となる平面(フレームの対称面)に対して系統的に導出できると仮定すれば、縁のあるタイプのフレームの場合、右あるいは左のひとつのプレゼンレンズで足りる。このような状況においては、可能な姿勢角を決定するために、2つの眼に関連する2つの同定要素を保持することが可能である。頭が本当にまっすぐであってフレームの対称面が矢状面と一致すると仮定すれば、ただ1つの眼に関連するただ1つの同定要素とすることも可能である。
【0148】
ひとつの変形態様では、レンズとこれに対応する眼の間の距離を計算するためにただ1つのプリズムを使用し、プリズムの底の端に現れるグラジュエーションを使用して眼で、あるいは、物指しで手動で計測して、オフセット距離を計測することができる。
【特許請求の範囲】
【請求項1】
将来眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの方向成分を、眼鏡を装着した状態で、決定する方法であって、
少なくとも1つの既知の幾何学的特性を有する、少なくとも1つの同定要素(60、70、80;700、800)を備えた、位置同定システム(20;200)を、フレーム(10)又はフレームに装着したレンズ(100;101)に取付ける、取付工程と、
画像撮影装置によって、垂直顔面平面(PCI)内で、前記同定要素(60、70、80;700、800)の2次元画像を撮影する、撮影工程と、
前記同定要素の前記撮影された画像を処理して、前記同定要素の前記既知の幾何学的特性に依存する、その幾何学的特性を計測する、計測処理工程、及び、
計測された前記同定要素の撮影された画像の幾何学的特性を前記既知の同定要素の幾何学的特性と比較して、前記レンズの向きの少なくとも1つの成分を計算する、比較計算工程と、を含む方法において、
前記方法は、前記位置同定システム(20)は、少なくとも1つの水平同定要素(70)、及び、前記要素を前記フレーム(10)のリム(11)にあるいは前記フレーム(10)に装着されたレンズ(100)に直接的あるいは間接的に取付ける、取付手段(25、26)を具備し、前記水平同定要素(70)は、前記計測された前記同定要素の撮影された画像の幾何学的特性が、垂直軸の周りの、装着者の頭に対する、前記フレーム(10)あるいは前記レンズ(100)の水平成分に依存するように配置されて、眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を、前記比較の関数として計算すること、を特徴とする方法。
【請求項2】
前記位置同定システム(20)は、前記フレーム(10)の2つのうち一方の前記リム(11)にあるいは前記フレーム(10)に装着された2つのうち一方の前記レンズ(100)に直接的あるいは間接的に取付けられた第一の水平同定要素(70)、及び、前記フレーム(10)のもう一方の前記リム(12)にあるいは前記フレーム(10)に装着されたもう一方の前記レンズ(101)に直接的あるいは間接的に取付けられた第二の水平同定要素(80)の、少なくとも2つの水平同定要素(70、80)を備え、
前記撮影工程は、前記水平同定要素(70、80)の2次元画像を顔面平面(PCI)内で撮影する工程を含み、
前記計測処理工程は、前記撮影画像を処理して、各々の同定要素に対応する前記既知の同定要素の幾何学的特性に基づいて、各々の同定要素の幾何学的特性を計測する工程を含み、
前記比較計算工程は、前記の測定された各々の同定要素の撮影画像の幾何学的特性と前記水平同定要素(70、80)に対応する前記既知の同定要素の幾何学的特性とを比較して、将来眼鏡を装着する人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を前記比較の関数として計算する工程を含む
、請求項1に記載の方法。
【請求項3】
前記眼(A0)の前記二等分線の向きの水平成分に対応する、前記撮影装置に対する姿勢角(APIV)は、前記の測定された各々の同定要素の撮影画像の幾何学的特性と前記水平同定要素(70、80)に対応する前記既知の同定要素の幾何学的特性とを比較する関数として計算される、請求項1、あるいは、請求項2のいずれか1つに記載の方法。
【請求項4】
前記位置同定システム(20)は、少なくとも1つの垂直同定要素(60)、及び、前記フレーム(10)の前記リム(11)にあるいは前記フレーム(10)に装着された前記レンズ(100)に直接的あるいは間接的に取付ける手段(25、26)を備え、
前記垂直同定要素(60)は、前記の測定された各々の同定要素の撮影画像の幾何学的特性が、ほぼ水平であって矢状面(PSAG)対して垂直な軸の周りで、眼鏡装着者の頭に対する、眼鏡用補正レンズ(100)のあるいはフレーム(10)のリム(11)の向きの垂直成分に依存するように配置されて、眼鏡装着者の頭に対する補正レンズの少なくとも1つの垂直方向成分を前記比較の関数として計算する、
請求項1、請求項2、あるいは、請求項3のいずれか1つに記載の方法。
【請求項5】
前記画像撮影手段(90)と前記位置同定システム(20)との間の距離(X)を測定する、請求項1、請求項2、請求項3、あるいは、請求項4のいずれか1つに記載の方法。
【請求項6】
前記瞳孔間距離(PDS)、前記瞳孔間半距離(PDS1,PDS2)、各々の前記レンズ(100,101)の前記幅と高さ(A及びB)、及び、各々のレンズの高さ(HG,HD)のうちの少なくとも1つの個人用パラメータを前記撮影画像からスケール因子を考慮して測定する、請求項1、請求項2、請求項3、請求項4、あるいは、請求項5のいずれか1つに記載の方法。
【請求項7】
前記瞳孔間距離(PDS)、前記瞳孔間半距離(PDS1,PDS2)、及び、各々の前記レンズ(100,101)の前記幅(A)の撮影画像から測定された値は前記測定された姿勢角(APIV)の関数として校正され、前記各々のレンズの高さ(B)の値と前記各々の瞳孔の高さ(HG,HD)の値は前記計算された方向の垂直成分の関数として校正される、請求項3、あるいは、請求項6のいずれか1つに記載の方法。
【請求項8】
前記瞳孔間距離(PDS)、又は、前記瞳孔間半距離(PDS1,PDS2)は、無限遠を見ている装着者に対して、前記画像撮影手段(90)と前記位置同定システム(20)との間の前記距離(D)の関数として計算される、請求項5に従属する請求項6、あるいは、請求項5に従属する請求項7のいずれか1つに記載の方法。
【請求項9】
補正レンズの向きの将来の眼鏡装着者の頭に対する少なくとも1つの成分を決定する方法を実行する、請求項1から請求項8のいずれか1つに記載された工程と、前記レンズの光学的に有効な面の一方若しくはもう一方の形状、又は、前記レンズの屈折率の傾斜分布を前記補正レンズの向きの前記決定された成分の関数として計算する工程の双方を含む、個人用眼鏡補正レンズの光学設計製造方法。
【請求項10】
眼鏡を装着した状態で、将来眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの方向成分を決定する装置であって、
第一に、フレーム(10)又はフレームに装着したレンズ(100;101)に取付けることができるようにした手段(25、26)、第二に、少なくとも1つの既知の幾何学的特性を有する、少なくとも1つの同定要素(60、70、80;700、800)を備えた、位置同定システム(20;200)と、
前記装着者によって前記位置同定システム(20;200)が前記フレーム(10)に取付けられたとき、垂直顔面平面(PCI)内で前記同定要素(60、70、80;700、800)の2次元画像(90)を撮影するようにされた画像撮影装置と、
第一に、前記撮影された画像を処理して、前記同定要素の前記既知の幾何学的特性に依存するその幾何学的特性を計測する、第二に、計測処理装置、及び、
前記既知の同定要素の幾何学的特性と前記計測された同定要素の撮影された画像の幾何学的特性の関数として、前記レンズの向きの少なくとも1つの成分を計算する、 計測処理手段を具備する装置において、
前記装置は、前記位置同定システム(20)は、少なくとも1つの水平同定要素(70;700)、及び、前記要素を前記フレーム(10)のリム(11)にあるいは前記フレーム(10)に装着されたレンズ(100)に直接的あるいは間接的に取付ける、取付手段(25、26)を具備し、前記水平同定要素(70;700)は、前記計測された前記同定要素の撮影された画像の幾何学的特性が、垂直軸の周りの、装着者の頭に対する、前記フレーム(10)あるいは前記レンズ(100)の水平成分に依存するように配置されて、前記計測手段は、眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を前記比較の関数として計測すること、を特徴とする装置。
【請求項11】
前記位置同定システム(20)は、少なくとも第一及び第二の水平同定要素(70、80;700、800)、及び、前記第一の水平同定要素(70;700)を前記フレーム(10)の2つのうち一方の前記リム(11)にあるいは前記フレーム(10)に装着された2つのうち一方の前記レンズ(100)に直接的あるいは間接的に取付け、前記第二の水平同定要素(80;800)を前記フレーム(10)のもう一方の前記リム(12)にあるいは前記フレーム(10)に装着されたもう一方の前記レンズ(101)に直接的あるいは間接的に取付ける取付手段(25、26、27、28)を備えた、請求項10に記載の装置。
【請求項12】
前記第一及び第二の水平同定要素(70、80;700、800)は、両方ともほぼ垂直なピボット軸(A1)の周りにヒンジで取付けられている、請求項10、及び、請求項11のいずれか1つに記載の装置。
【請求項13】
前記画像撮影手段(90)と前記位置同定システム(20)との間の距離(X)を計測する手段を含む、請求項10から請求項12のいずれか1つに記載の装置。
【請求項14】
前記同定要素(60、70、80;700、800)の既知の幾何学的特性は、幾何学的なパターン(61、71、81、701、801)を有し、前記幾何学的なパターン(61、71、81、701、801)は、前記前方撮影面(PCI)上に突出する前記幾何学的なパターン(61、71、81、701、801)の幾何学的配置が前記同定要素(60、70、80;700、800)の少なくとも1つの方向成分を表すように作られている、請求項10から請求項13のいずれか1つに記載の装置。
【請求項15】
前記装着者の2つの眼(OG,OD)うちの1つに関連する少なくとも1つのプリズム効果を有する光学部材(31)、前記プリズム効果の方向に平行でありかつ前記位置同定システム(20;200)に対してほぼ垂直に移動して測定位置につくことができるように取付けられている端(33;34)を具備し、前記端(33;34)は、前方から見て、眼(OG)の瞳孔(PG)と交差して瞳孔(PG)の部位(PGS)の画像をオフセットするようにされており、プロッセサ手段(93)は、前記プリズム効果を有する光学部材(31)によってオフセットされた、前記瞳孔(PG)の部位(PGS)の画像に応じて前記フレームに装着されたレンズ(100)と対応する眼(OG)との間の距離を導出するように製造されている、請求項10から請求項14のいずれか1つに記載の装置。
【請求項16】
計測中の眼に対してプリズム効果を有する唯一の光学部財(31)、請求項10から請求項15のいずれか1つに記載の装置。
【請求項17】
前記同定要素(60、70、80;700、800)は、前記フレーム(10)あるいは前記レンズの向きを表す少なくとも1つの既知の幾何学的特性を有し、前記取付手段によって前記システムはフレーム上で、ほぼ水平で前記フレームあるいは前記レンズの中間面内に含まれる軸の周りに傾斜することができる、請求項10から請求項16のいずれか1つに記載の装置。
【請求項18】
前記位置同定システムを前記レンズ(100、101)あるいはフレーム(10)に対して傾斜させる、弾性あるいは重力を使用した返り手段が設けられている、請求項10から請求項17のいずれか1つに記載の装置。
【請求項19】
眼鏡用補正レンズを個人用に光学的に設計製造する、請求項9に記載の方法を実行する命令を含む、コンピュータプログラム。
【請求項20】
補正レンズの将来の装着者の頭に対する少なくとも1つの方向成分を決定する、請求項1から8に記載のいずれか1つの方法を実行する命令を含む、コンピュータプログラム。
【請求項1】
将来眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの方向成分を、眼鏡を装着した状態で、決定する方法であって、
少なくとも1つの既知の幾何学的特性を有する、少なくとも1つの同定要素(60、70、80;700、800)を備えた、位置同定システム(20;200)を、フレーム(10)又はフレームに装着したレンズ(100;101)に取付ける、取付工程と、
画像撮影装置によって、垂直顔面平面(PCI)内で、前記同定要素(60、70、80;700、800)の2次元画像を撮影する、撮影工程と、
前記同定要素の前記撮影された画像を処理して、前記同定要素の前記既知の幾何学的特性に依存する、その幾何学的特性を計測する、計測処理工程、及び、
計測された前記同定要素の撮影された画像の幾何学的特性を前記既知の同定要素の幾何学的特性と比較して、前記レンズの向きの少なくとも1つの成分を計算する、比較計算工程と、を含む方法において、
前記方法は、前記位置同定システム(20)は、少なくとも1つの水平同定要素(70)、及び、前記要素を前記フレーム(10)のリム(11)にあるいは前記フレーム(10)に装着されたレンズ(100)に直接的あるいは間接的に取付ける、取付手段(25、26)を具備し、前記水平同定要素(70)は、前記計測された前記同定要素の撮影された画像の幾何学的特性が、垂直軸の周りの、装着者の頭に対する、前記フレーム(10)あるいは前記レンズ(100)の水平成分に依存するように配置されて、眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を、前記比較の関数として計算すること、を特徴とする方法。
【請求項2】
前記位置同定システム(20)は、前記フレーム(10)の2つのうち一方の前記リム(11)にあるいは前記フレーム(10)に装着された2つのうち一方の前記レンズ(100)に直接的あるいは間接的に取付けられた第一の水平同定要素(70)、及び、前記フレーム(10)のもう一方の前記リム(12)にあるいは前記フレーム(10)に装着されたもう一方の前記レンズ(101)に直接的あるいは間接的に取付けられた第二の水平同定要素(80)の、少なくとも2つの水平同定要素(70、80)を備え、
前記撮影工程は、前記水平同定要素(70、80)の2次元画像を顔面平面(PCI)内で撮影する工程を含み、
前記計測処理工程は、前記撮影画像を処理して、各々の同定要素に対応する前記既知の同定要素の幾何学的特性に基づいて、各々の同定要素の幾何学的特性を計測する工程を含み、
前記比較計算工程は、前記の測定された各々の同定要素の撮影画像の幾何学的特性と前記水平同定要素(70、80)に対応する前記既知の同定要素の幾何学的特性とを比較して、将来眼鏡を装着する人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を前記比較の関数として計算する工程を含む
、請求項1に記載の方法。
【請求項3】
前記眼(A0)の前記二等分線の向きの水平成分に対応する、前記撮影装置に対する姿勢角(APIV)は、前記の測定された各々の同定要素の撮影画像の幾何学的特性と前記水平同定要素(70、80)に対応する前記既知の同定要素の幾何学的特性とを比較する関数として計算される、請求項1、あるいは、請求項2のいずれか1つに記載の方法。
【請求項4】
前記位置同定システム(20)は、少なくとも1つの垂直同定要素(60)、及び、前記フレーム(10)の前記リム(11)にあるいは前記フレーム(10)に装着された前記レンズ(100)に直接的あるいは間接的に取付ける手段(25、26)を備え、
前記垂直同定要素(60)は、前記の測定された各々の同定要素の撮影画像の幾何学的特性が、ほぼ水平であって矢状面(PSAG)対して垂直な軸の周りで、眼鏡装着者の頭に対する、眼鏡用補正レンズ(100)のあるいはフレーム(10)のリム(11)の向きの垂直成分に依存するように配置されて、眼鏡装着者の頭に対する補正レンズの少なくとも1つの垂直方向成分を前記比較の関数として計算する、
請求項1、請求項2、あるいは、請求項3のいずれか1つに記載の方法。
【請求項5】
前記画像撮影手段(90)と前記位置同定システム(20)との間の距離(X)を測定する、請求項1、請求項2、請求項3、あるいは、請求項4のいずれか1つに記載の方法。
【請求項6】
前記瞳孔間距離(PDS)、前記瞳孔間半距離(PDS1,PDS2)、各々の前記レンズ(100,101)の前記幅と高さ(A及びB)、及び、各々のレンズの高さ(HG,HD)のうちの少なくとも1つの個人用パラメータを前記撮影画像からスケール因子を考慮して測定する、請求項1、請求項2、請求項3、請求項4、あるいは、請求項5のいずれか1つに記載の方法。
【請求項7】
前記瞳孔間距離(PDS)、前記瞳孔間半距離(PDS1,PDS2)、及び、各々の前記レンズ(100,101)の前記幅(A)の撮影画像から測定された値は前記測定された姿勢角(APIV)の関数として校正され、前記各々のレンズの高さ(B)の値と前記各々の瞳孔の高さ(HG,HD)の値は前記計算された方向の垂直成分の関数として校正される、請求項3、あるいは、請求項6のいずれか1つに記載の方法。
【請求項8】
前記瞳孔間距離(PDS)、又は、前記瞳孔間半距離(PDS1,PDS2)は、無限遠を見ている装着者に対して、前記画像撮影手段(90)と前記位置同定システム(20)との間の前記距離(D)の関数として計算される、請求項5に従属する請求項6、あるいは、請求項5に従属する請求項7のいずれか1つに記載の方法。
【請求項9】
補正レンズの向きの将来の眼鏡装着者の頭に対する少なくとも1つの成分を決定する方法を実行する、請求項1から請求項8のいずれか1つに記載された工程と、前記レンズの光学的に有効な面の一方若しくはもう一方の形状、又は、前記レンズの屈折率の傾斜分布を前記補正レンズの向きの前記決定された成分の関数として計算する工程の双方を含む、個人用眼鏡補正レンズの光学設計製造方法。
【請求項10】
眼鏡を装着した状態で、将来眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの方向成分を決定する装置であって、
第一に、フレーム(10)又はフレームに装着したレンズ(100;101)に取付けることができるようにした手段(25、26)、第二に、少なくとも1つの既知の幾何学的特性を有する、少なくとも1つの同定要素(60、70、80;700、800)を備えた、位置同定システム(20;200)と、
前記装着者によって前記位置同定システム(20;200)が前記フレーム(10)に取付けられたとき、垂直顔面平面(PCI)内で前記同定要素(60、70、80;700、800)の2次元画像(90)を撮影するようにされた画像撮影装置と、
第一に、前記撮影された画像を処理して、前記同定要素の前記既知の幾何学的特性に依存するその幾何学的特性を計測する、第二に、計測処理装置、及び、
前記既知の同定要素の幾何学的特性と前記計測された同定要素の撮影された画像の幾何学的特性の関数として、前記レンズの向きの少なくとも1つの成分を計算する、 計測処理手段を具備する装置において、
前記装置は、前記位置同定システム(20)は、少なくとも1つの水平同定要素(70;700)、及び、前記要素を前記フレーム(10)のリム(11)にあるいは前記フレーム(10)に装着されたレンズ(100)に直接的あるいは間接的に取付ける、取付手段(25、26)を具備し、前記水平同定要素(70;700)は、前記計測された前記同定要素の撮影された画像の幾何学的特性が、垂直軸の周りの、装着者の頭に対する、前記フレーム(10)あるいは前記レンズ(100)の水平成分に依存するように配置されて、前記計測手段は、眼鏡を装着することになる人の頭に対する眼鏡用補正レンズの少なくともひとつの水平方向成分を前記比較の関数として計測すること、を特徴とする装置。
【請求項11】
前記位置同定システム(20)は、少なくとも第一及び第二の水平同定要素(70、80;700、800)、及び、前記第一の水平同定要素(70;700)を前記フレーム(10)の2つのうち一方の前記リム(11)にあるいは前記フレーム(10)に装着された2つのうち一方の前記レンズ(100)に直接的あるいは間接的に取付け、前記第二の水平同定要素(80;800)を前記フレーム(10)のもう一方の前記リム(12)にあるいは前記フレーム(10)に装着されたもう一方の前記レンズ(101)に直接的あるいは間接的に取付ける取付手段(25、26、27、28)を備えた、請求項10に記載の装置。
【請求項12】
前記第一及び第二の水平同定要素(70、80;700、800)は、両方ともほぼ垂直なピボット軸(A1)の周りにヒンジで取付けられている、請求項10、及び、請求項11のいずれか1つに記載の装置。
【請求項13】
前記画像撮影手段(90)と前記位置同定システム(20)との間の距離(X)を計測する手段を含む、請求項10から請求項12のいずれか1つに記載の装置。
【請求項14】
前記同定要素(60、70、80;700、800)の既知の幾何学的特性は、幾何学的なパターン(61、71、81、701、801)を有し、前記幾何学的なパターン(61、71、81、701、801)は、前記前方撮影面(PCI)上に突出する前記幾何学的なパターン(61、71、81、701、801)の幾何学的配置が前記同定要素(60、70、80;700、800)の少なくとも1つの方向成分を表すように作られている、請求項10から請求項13のいずれか1つに記載の装置。
【請求項15】
前記装着者の2つの眼(OG,OD)うちの1つに関連する少なくとも1つのプリズム効果を有する光学部材(31)、前記プリズム効果の方向に平行でありかつ前記位置同定システム(20;200)に対してほぼ垂直に移動して測定位置につくことができるように取付けられている端(33;34)を具備し、前記端(33;34)は、前方から見て、眼(OG)の瞳孔(PG)と交差して瞳孔(PG)の部位(PGS)の画像をオフセットするようにされており、プロッセサ手段(93)は、前記プリズム効果を有する光学部材(31)によってオフセットされた、前記瞳孔(PG)の部位(PGS)の画像に応じて前記フレームに装着されたレンズ(100)と対応する眼(OG)との間の距離を導出するように製造されている、請求項10から請求項14のいずれか1つに記載の装置。
【請求項16】
計測中の眼に対してプリズム効果を有する唯一の光学部財(31)、請求項10から請求項15のいずれか1つに記載の装置。
【請求項17】
前記同定要素(60、70、80;700、800)は、前記フレーム(10)あるいは前記レンズの向きを表す少なくとも1つの既知の幾何学的特性を有し、前記取付手段によって前記システムはフレーム上で、ほぼ水平で前記フレームあるいは前記レンズの中間面内に含まれる軸の周りに傾斜することができる、請求項10から請求項16のいずれか1つに記載の装置。
【請求項18】
前記位置同定システムを前記レンズ(100、101)あるいはフレーム(10)に対して傾斜させる、弾性あるいは重力を使用した返り手段が設けられている、請求項10から請求項17のいずれか1つに記載の装置。
【請求項19】
眼鏡用補正レンズを個人用に光学的に設計製造する、請求項9に記載の方法を実行する命令を含む、コンピュータプログラム。
【請求項20】
補正レンズの将来の装着者の頭に対する少なくとも1つの方向成分を決定する、請求項1から8に記載のいずれか1つの方法を実行する命令を含む、コンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公表番号】特表2010−503885(P2010−503885A)
【公表日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2009−527911(P2009−527911)
【出願日】平成19年9月10日(2007.9.10)
【国際出願番号】PCT/IB2007/002598
【国際公開番号】WO2008/032173
【国際公開日】平成20年3月20日(2008.3.20)
【出願人】(504268065)エシロル アンテルナショナル(コンパーニュ ジェネラル ドプテーク) (16)
【Fターム(参考)】
【公表日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成19年9月10日(2007.9.10)
【国際出願番号】PCT/IB2007/002598
【国際公開番号】WO2008/032173
【国際公開日】平成20年3月20日(2008.3.20)
【出願人】(504268065)エシロル アンテルナショナル(コンパーニュ ジェネラル ドプテーク) (16)
【Fターム(参考)】
[ Back to top ]