
砂糖きび管理作業機
【課題】砂糖きびの根切り、培土作業を行う管理作業機を4連式のものにするについて、根切り作業又は培土作業の作業性を考慮して、4連のディスクユニットのアタッチメントフレームへの配置及びアタッチメントフレームに対する支持機構を工夫する。
【解決手段】アタッチメントフレームF前方の支持棒F2に他の左右1対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取り付けられており、当該1対のディスクユニットU3,U4がディスクユニットU1,U2よりも左右方向外側にあり、当該ディスクユニットU3,U4は、上記ディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、上記ディスクユニットU1,U2によって根切りされ又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取り付けられていること。
【解決手段】アタッチメントフレームF前方の支持棒F2に他の左右1対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取り付けられており、当該1対のディスクユニットU3,U4がディスクユニットU1,U2よりも左右方向外側にあり、当該ディスクユニットU3,U4は、上記ディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、上記ディスクユニットU1,U2によって根切りされ又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取り付けられていること。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、砂糖きび管理作業機、すなわち、根切り作業(畝の側部を掘削して排土する作業)及び培土作業(一旦排土された土を元の畝の側部に戻す作業)を行う作業機に関するものである。さらに具体的には、この管理作業を極めて能率的に行うことのできる4連式のトラクタアタッチメントに関するものであり、根切り作業と培土作業を4つのディスクユニットで一度に2畝分づつ処理するものである。
そして、根切り作業又は培土作業で同じ溝(畝の間の溝)をトラクタの車輪が繰り返し通過すると、このことによって上記溝底が踏み固められ、また荒らされるが、この発明はこのことを回避でき、また、4つのディスクユニットの掘削深さ(ディスクユニットのディスクが地面に食い込む深さ)の変動をなくして、根切りの深さ、培土の深さを安定させることができるものである。
【背景技術】
【0002】
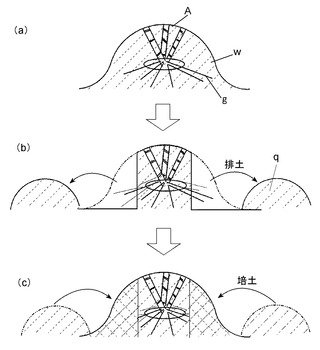
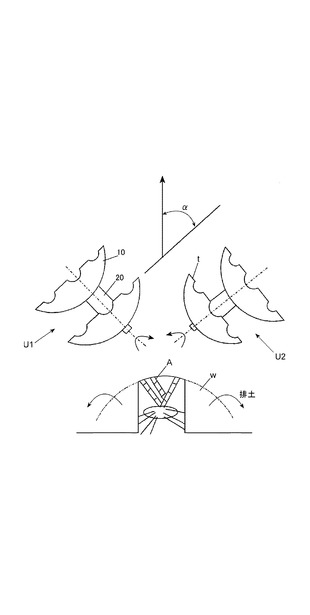
砂糖きび管理作業に根切り作業と培土作業がある。この根切り作業は、図5(b)に示すように、中央に古株Aがある畝wの両側を掘削して畝の外側(畝と畝の間の溝の中央)に排土する作業である。また、培土作業は、図5(c)に示すように、根切りのために一旦排土した土を元の畝wの側部に戻す作業である。
以上の根切り作業及び培土作業は、砂糖きびの古株Aの毛根g(図5−1参照)を切除して新根を発育させ、古株Aを活性化させるために、収穫後の早い時期に行われる作業であって、砂糖きび栽培において従来から行われている管理作業である。
上記根切り作業を行うための作業具をハンドトラクタ(歩行式耕耘機)に装着したものが実開昭63−9808号公報に記載されているが、しかし、砂糖きびの根切り作業機を乗用トラクタのアタッチメントにした例が記載されている特許文献は見当たらない。また、ディスクユニットが左右一対の2つのディスクを備えていて、根切り作業だけでなく、培土作業も行えるようにした例(2連式のもの)が記載されている特許文献も見当たらない。
【0003】
他方、砂糖きびの根切り作業を行うものではないが、農業用トラクタ(乗用トラクタ)にアタッチメントを装着した根切り作業機が公知である。これは直刀爪によって根切りを行い、なた爪によって耕耘し、耕耘した土を排土ディスクで排土する一般的な根切り作業機である(特開2001−169603号公報)。この作業機はどのような農作物の管理作業に用いられるものかは記載されていないが、一例として、お茶の木等の多年作物が推測され、また、直刀爪で根切りし、なた爪で耕耘し、ディスクで排土するものであるから、これを用いて砂糖きびの根切り作業を行うこともできないではないものと推測することができる。
なお、このものは、なた爪で耕耘した土を「覆土ディスクで覆土」して畝を形成することができる旨記載されている(段落「0038」)が、なた爪で耕耘した土をディスクで外側に排出するものであるから、根切り作業で一旦外側に排出された土を再び畝に寄せる(培土する)ことはできず、またそのような使い方は想定されていない。
【0004】
砂糖きびの根切り及び培土が農業用トラクタの3点ヒッチに連結された根切り作業機(トラクタアタッチメント)で行われるようになっており、この根切り作業機(本発明の前提となる従来技術)は、図5−1に記載されているようなものであり、前後の支持棒(ツールバー)を有する四角なフレームの後方の支持棒F1に左右一対のディスクユニットU1,U2が装着されているものである(図5−1)。
また、このディスクユニットU1,U2の支持棒F1への配置は、本願の図6〜図8に記載されているようなものである(ただし、この従来技術が記載されている刊行物は見当たらない)。
図6〜図8に示されている従来技術は、2枚一組のディスクを備えたディスクユニットU1,U2がフレームFの支持棒F1の左右にそれぞれ装着された2連式のものである(図8)。
【0005】
後方の支持棒F1に取付けられた左右のディスクユニットU1,U2が図6に示すように進行方向に対してハの字状に配置されていて、農業用トラクタに牽引されて畝wの両側を掘削しながら左右に排土する。このときの畝wに対する左右方向の掘削幅は支持棒F1に対するディスクユニットU1,U2の取付位置で決められるものであり、左右のディスクユニットU1,U2間の間隔B(図8参照)を加減することでその広さが調節される。そして、畝幅の違いに対する調整もディスクユニットU1,U2間の間隔Bを調節することによってなされる。上下方向の掘削深さは、フレームFの棚Hに載せるウエイトの重さによって加減される。
【0006】
トラクタで牽引されると、左右のディスクユニットU1,U2の各ディスク10,10が前進方向に対してハの字状に開いた状態で回転しながら前進するので、畝の両側部の土が掘削され、外側(畝の左右両外側)に押しやられる。このとき、各ディスク10,10で砂糖きびの古株Aの近くまで掘削され、古株Aの毛根gがディスク10,10の外周の切り刃tで切除される(なお、ディスク10は、左右のディスク10a、10bの総称)。
【0007】
根切り作業で左右外側に押しやられた土(排土)は、その後、培土作業で畝wに戻される。この培土作業は、別途の農機具(土寄せ専用作業機)で行われていたが、最近、ディスク10による管理作業機を利用して行われることがある。培土作業にディスク10による管理作業機を利用できれば、培土専用機が不要であるから極めて便利である。
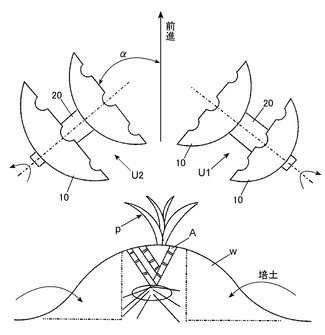
ディスク10による管理作業機で培土(又は土寄せ)作業を行うときは、ディスクユニットU1,U2は前方に向けて開いた逆ハの字状に取付けられ、ディスク10が回転しながら前進することにより、両側の土(排土)qが畝wの方に押しやられる(図7)。
【0008】
上記の根切り作業(以下、「排土作業」ともいう)及び培土作業(以下、「土寄せ作業」ともいう)で使用されるディスクユニットU1,U2のディスク10は、ほぼ半球状のディスクであり、その外周に切り刃tがある。他方、根切り作業と培土作業とで左右のディスクの前進方向に対する向きが反対であり、また、左右のディスクユニットU1,U2間の間隔B(図8参照)が全く違う。このために、上記両作業に応じて支持棒F1に対して左右のディスクユニットU1,U2を交互に付け替える必要がある。したがって、左右のディスクユニットU1,U2を交互に入れ替え、さらに、支持棒F1に対する取付け角度及び取付け位置を変更する必要がある。
【0009】
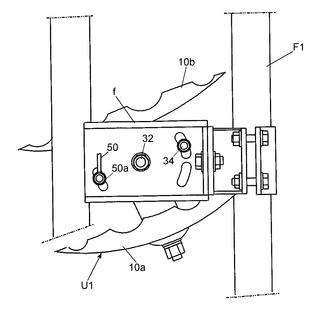
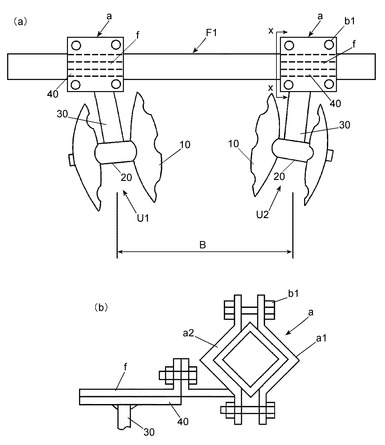
ディスクユニットUの構造は種々であるが、図示の例では中空の横軸(横方向軸状ハウジング)20に縦軸(縦方向の支持軸)30が固着されており、横軸20に回転軸が回転自在に支承されており、この回転軸の両端にディスク10がそれぞれ着脱自在に取付けられている(図4参照)。ディスクユニットUの支持棒F1への取付機構は次のとおりである。すなわち、縦軸30の上端の取付ブラケット33が支持ブラケットfに着脱自在に取付けられており、当該支持ブラケットfが支持棒F1にクランプaで着脱自在に取付けられている。支持棒F1は中空角材である。クランプa(図2におけるクランプaと同じ)は把持板a1,a2、ボルトb1によるものであり、把持板a1,a2で支持棒F1を鋏み、ボルトb1で締め付けて支持棒F1に固定されている。そしてクランプaに支持ブラケットfが取付けられており、縦軸30の上端に取付ブラケット33が溶接されている。支持ブラケットfに上記取付ブラケット33を取付ける機構は、固定ボルト34と取付ブラケット33のボルト孔と支持ブラケットfの長孔(円弧状の長孔)によるものであって、左右のディスクユニットU1,U2の前進方向に対する角度を上記長孔を利用して調整することができる。
【0010】
そして、縦軸30の取付ブラケット33が支持ブラケットf、クランプaを介して支持棒F1に着脱自在に固着されていることで、左右のディスクユニットU1,U2の前進方向に対する向きを変更し、またこれら間の間隔Bを変更することができる。 排土作業と培土作業の変更に伴ってディスクユニットU1,U2の付替えを行うには、縦軸30を支持棒F1の支持ブラケットfから外し、左右のディスクユニットU1,U2をその向きを変えないで交互に入替え、これらの取付け位置を変更し、前進方向に対する角度αを微調整することが必要である。
【0011】
他方、一対のディスク10,10、回転軸21、横軸20、縦軸30等からなるディスクユニットUは極めて重く(例えば50kg)、このためその取外し作業、取付け作業が困難で、かつ危険であり、また、支持棒F1から外されて地面に置かれると転がり易くて安定性が悪いので、支持棒F1から一旦外して付替える作業を一人で行うのは困難であり、また安全上の問題が大きい。このために、排土作業と培土作業が変更されるとき、これに伴うディスクユニットU1,U2を付替える作業を簡単容易に行えるようにすることが求められる。
【0012】
左右のディスクユニットU1,U2を支持棒F1から取外さないで、これらを支持棒に対して付替えられれば、この付替え作業を一人で容易に行えるので便利であり、また安全である。そしてそのためには、左右のディスクユニットUを支持ブラケットfに支持させたままで前進方向に対する向きを反対方向に容易に変更することができ、また、左右方向の位置を容易に変更できるようにすることが必要である。
従来の2連式のものでは2個のディスクユニットUの付替えであるが、作業能力を高めるために4連式にすればその場合のディスクユニットの上記付替えは4個であるから、この付替え作業が極めて困難になるので、上記問題がなお一層重大な問題になる。
【0013】
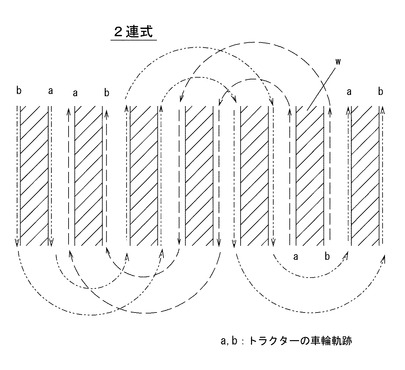
ところで、砂糖きびの管理作業機(あるいは根切り作業機)では、トラクタのホイールベースが約1.8m、トラクタとアタッチメントによる作業機全長が4mであり、これに対して砂糖きびの畝の間隔は1.1〜1.2mであってトラクタのホイールベースに比して比較的狭い。2連のディスクユニットによって一つの畝の両側を根切りし、又は培土することになるので、根切り作業、培土作業は、管理作業機の操向性から、一畝おきになされるのが一般的なやり方である。これを模式的に示せば図9のようになる。このような作業の運びでは、トラクタの車輪が根切り作業で畝間の溝を2回通過し、また、培土作業で2回通過するので、合計4回通過することになる。このようにトラクタの車輪が畝間の溝を繰り返し通過すると、通過する回数が多いほど溝底が踏み固められ、また、荒らされることになる。このことは、砂糖きびのその後の生育にとっては好ましくないことであるが、ディスクユニットが2連のもの、すなわち2連式の従来の管理作業機では避けられない問題である。
【0014】
したがって、砂糖きびの管理作業機について、当該作業機の車輪で畝間の溝底が踏み固められ、荒らされることを可及的に軽減することが求められる。
他方、根切り作業、培土作業の能力を向上させるために、ディスクユニットを4個のもの、すなわち4連のものにすることが望まれる。畝の長さが1km以上にも及ぶ外国では特にこのことが望まれる。
農作業機において作業能力を高めるために、横一列に配置した作業具を左右対称に増やして4連式、6連式のものにすることは、他の作業機(例えば、稲の植付け機、刈取り機など)で周知であるが、砂糖きび管理作業機では、横一列のディスクユニットを増設して4連にすることには重大な問題がある。このため、4連式にするに当たっては、アタッチメントフレームFに4つのディスクユニットをどのように配置するかについて、作業性を考慮した(フレームにかかる力の左右のバランスが保持され、また、畝幅に合わせるためのディスクユニットの位置調整に支障がないことなど)特別の配置を工夫する必要があり、また、根切り作業と培土作業の切り換えに伴うディスクユニットの付替えに支障がなく、かつ簡便に行えることが必要である。もしそうでなければ、実際問題として一般農家の手に余るので、4連のものが一般農家に普及するのは難しいものと思われる。
そしてまた、4連のディスクユニットの掘削深さを従来の方式(ウエイトの重さの調整と3点ヒッチの昇降操作で掘削深さを調節する方式)で一様に安定させることは極めて困難であり、その結果、掘削深さが大きく変動する。したがって、上記掘削深さを一様に安定させるために、フレームFの高さ位置を安定させるようにフレーム支持機構を工夫する必要がある。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】実開昭63−9808号公報
【特許文献2】特開2001−169603号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
この発明の課題は、砂糖きびの根切り、培土作業を行う管理作業機を4連式のもの(ディスクユニットを4つを備えているもの)にするについて、(i)根切り作業又は培土作業の作業性を考慮して、4連のディスクユニットのアタッチメントフレームへの配置及びアタッチメントフレームに対する支持機構を工夫し、また、(ii)4連のディスクユニットについてアタッチメントフレームから取り外さないで、前後方向の向きを反対向きに変更し、また前後方向に対する角度を微調整することができ、かつ左右のディスクユニット間の間隔Bを変更し、微調整することができるように、ディスクユニットの上記支持棒F1への取付け機構を工夫することであり、そしてまた、(iii)4連のディスクユニットによる掘削深さを一様に安定させるためのフレーム支持機構を工夫することである。
【課題を解決するための手段】
【0017】
〔解決手段1〕
上記課題を解決するための手段は、上記の課題(i)を解決するための手段であり、農業用トラクタに連結されるアタッチメントであり、アタッチメントフレームF後方の支持棒F1に左右一対のディスクユニットU1,U2が固定されていて、前進することで畝の両側部を根切りし、又は、培土する砂糖きび管理作業機であって、上記ディスクユニットU1,U2が横軸20及び縦軸30を有し、横軸20に回転自在に支承された回転軸21を有し、当該回転軸21の両端にディスク10,10がそれぞれ固定されており、上記支持棒F1にクランプによって支持ブラケットfが固定されており、上記縦軸30の取付ブラケット33が上記支持ブラケットfに取付けられている砂糖きびの管理作業機について、次の(a)(b)(c)によるものである。
(a)上記アタッチメントフレーム前方の支持棒F2に他の左右一対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取付けられており、当該一対のディスクユニットU3,U4が後方の支持棒F1の左右のディスクユニットU1,U2よりも左右方向外側にあり、
(b)前方の支持棒F2の左右のディスクユニットU3,U4は、後方の支持棒F1の左右のディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、
(c)後方の支持棒F1の左右のディスクユニットF1,U2によって根切りされ、又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取付けられていること。
【0018】
ディスクユニットの数を4,6,8と増加させれば、一度に2つ,3つ,4つの畝を処理(根切り処理、培土処理)することになり、作業能力が高くなるのは自明のことであるが、ディスク間の間隔は、畝の幅、畝間の間隔によって決まることであり、同時に処理される畝の数が増加するほど、左右両端のディスクユニット間の間隔が大きくなる。
他方、ディスクユニットのディスクは地面に押し込まれた状態でトラクタに牽引されて回転し、地面を掘削し、左右に排出しながら前進するものである。そして、このディスクの前進に対しては大きな抵抗がかかり、この抵抗の大きさは上記ディスクの食い込み深さの変動によって大きく変動する。そして、この抵抗の左右のアンバランスによってトラクタが左右に振られて直進性が阻害され、左右両端のディスクユニット間の間隔が広いほど上記抵抗の変動の直進性に対する影響が大きく、これが一定の限界を超えると、運転操作で直進走行させることは不可能になる。
【0019】
ところで、解決手段1による砂糖きびの管理作業機では、右側、左側のそれぞれ2つのディスクユニット(U1とU3、U2とU4)が配置されており、U3とU4間の間隔は従来のもののディスクユニットU1とU2間の間隔のほぼ2倍程度であり、この程度であれば、運転操作によってトラクタを直進させることができる。
また、ディスクユニットU3,U4の前方の支持棒F2に対する前後方向の位置関係、ディスクユニットU1,U2の後方の支持棒F1に対する前後方向の位置関係は、前方のディスクユニットU3,U4と後方のディスクユニットU1,U2が互いに干渉しなければ、適宜選択できることであるが、共に各支持棒の前方に位置しているのが基本である。なぜなら、3点ヒッチJにかかる負荷が最も小さく、したがって、構造設計の都合、また3点ヒッチによる昇降操作の都合から最も有利であるからである。他方、この他の配置には格別の利点がない。
また、ディスクユニットU3,U4がディスクユニットU1,U2に対して向かい合わせ、背中合わせにするのは、ディスクユニットU1,U2によって掘削され又は培土される畝の隣の畝の内側を掘削し、又は培土することとの関連から必要不可欠の事項である。なぜなら、ディスクユニットU1,U2と同じ方向に向けると、ディスクユニットU1,U2とともに根切り作業、培土作業を行うことはできないからである。
【0020】
さらに、フレームFの後方の支持棒F1に4つのディスユニットが装着されると、隣接するディスクユニットが、互いに干渉するのでこのような配置はできないが、解決手段1による場合は、隣接するディスクユニットが前後方向にずれているのでこれらが互いに干渉するとはなく、この配置によって、4連のディスクユニットを集約的に配置することができる。
【0021】
〔解決手段1の実施態様〕
解決手段1の実施態様は、上記の課題(iii)の解決手段であり、解決手段1による砂糖きびの管理作業機について、(d)後方の横方向支持棒F1の中央部に尾輪支持枠Faが固定されており、この尾輪支持枠Faに尾輪支持部があり、当該尾輪支持部に左右一対の尾輪kが取付けられていることである。
【0022】
〔解決手段2〕
解決手段2は、上記の課題(ii)の解決手段であり、上記解決手段1又は上記実施態様による砂糖きびの管理作業機について、次の(イ)(ロ)(ハ)によるものである。
(イ)上記ディスクユニットU1乃至U4の縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
(ロ)上記縦軸30の旋回軸31による旋回中心が上記横軸20の長手方向中心から所定偏心量Eだけ長手方向にずれており、
(ハ)上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記取付ブラケット33のボルト孔及び上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が支持ブラケットfに固定され、縦軸30が固定されるようになっていること。
なお、上記の旋回中心のずれは、一対のディスクのうち、縦軸30に背面を向けているディスクの方向への偏心である。
【0023】
固定ボルトを外すと、ディスクユニットの縦軸30は支持ブラケットfに吊り下げられたままで旋回できるようになる。ディスクユニットUを旋回させると、ディスクユニットの前進方向に対する向き(角度)が反対向きに変わる。そして、横軸20の長手方向においてずれた位置に縦軸30が固定されているので、旋回することによって上記支持棒F1に対するディスクユニットUの横方向位置が上記偏心量Eの2倍だけ外方又は内方に変化し、その結果、左右のディスクユニットU間の間隔Bが拡大又は縮小される。その後、固定ボルトを取付ブラケットのボルト孔及び支持ブラケットの長孔に挿入し、これにナットを螺合させて締め付けると、ディスクユニットが調整された横方向位置及び旋回方向位置において固定される。
【0024】
なお、支持ブラケットfの長孔は、縦軸30の旋回方向位置の調整を可能にするものであるから、これを複数の孔によるものに変更することもできる。
また、上記要件(ロ)によって、縦軸30の旋回軸31を中心にして旋回するときに左右のディスクユニットの間隔が排土状態から培土状態へ、又は培土状態から排土状態へその向きと間隔とが機械的に変更されるが、当該要件(ロ)がなければこの機能を奏することはできない。しかし、当該要件(ロ)がなくても、ディスクユニットの前進方向に対する向きの反対向きへの変更を簡単容易に行うことはできる。この場合は、クランプaを緩めて左右のディスクユニットの間隔をその後の管理作業に適した間隔に変更する必要がある。
【発明の効果】
【0025】
〔解決手段1による発明〕
解決手段1による発明の砂糖きびの管理作業機による場合は、根切り作業(又は培土作業)が例えば図9−1に示す運びで行われるのが一般的である。これは、一つおきの畝kをまたいで往復され、この往復で圃場の一方から他方に向かって作業が順次進められる。したがって、例えば根切り作業で同じ溝が2度踏み固められることはなく、一つおきの溝は踏み固められずに済むことになる。そして、従来のもの(図9)のように、圃場の一方から他方に向かって順次進められ、他方から一方に向かって同作業が繰り返されることはないので、作業性に優れ、作業能率が大幅に向上する。
また、この発明によるディスクユニットの取付け構造特有の次の(A)(B)(C)の作用を奏する。
(A)フレームの前方の支持棒F2には、3点ヒッチとの連結手段、ウエイト棚など種々の部材が設けられるが、ウエイト棚の支持構造を工夫することにより、前方の支持棒F2の左右外側部の前方にディスクユニットU3,U4を装着し、かつ左右方向の位置を調整自在にすることが可能であるので、フレームの左右方向幅の増分を可及的に抑制しながら、これに左右一対のディスクユニットU3,U4を支持させることができる。
(B)アタッチメントの左右方向幅の増分は小さいので、作業機の圃場での旋回に格別の支障を来すことはなく、したがって、実用性が阻害されることはない。
(C)左右のディスクユニット間の最大間隔が、2連の従来例のものの最大間隔のほぼ1.8〜1.9倍程度であり、ディスクユニットにかかる抵抗の変動によってトラクタの直進性が著しく阻害されることはなく、したがって、トラクタを畝にそって直進走行させることができる。
【0026】
〔解決手段1の実施態様〕
解決手段1の上記実施態様によれば、作業機の重量の一部を尾輪kで支持し、この尾輪kの高さでディスクユニットによる掘削深さ(ディスクの地面への食い込み深さ)を確実に規制することができる。すなわち、作業機にかけるウエイトを十分に重くし、その一部を尾輪kに分担させることにより、ディスクを下から押し上げる力の変動による4つのディスクユニットU1〜U4の浮き上がりを防止して、その地面への食い込み深さ(掘削深さへ)の影響を低減し、これらを尾輪kによる支持高さに一様に安定にさせることができる。
【0027】
〔解決手段2による発明〕
解決手段2による発明は、上記「解決手段1による発明」の効果に加えて、次の効果を奏する。
ディスクユニットU(U1〜U4)の縦軸30が上端に旋回軸31を有し、アタッチメントフレームの支持棒F1,F2に固定された支持ブラケットfに旋回自在に支持されているので、ディスクユニットUを支持ブラケットfに吊り下げた状態で旋回させて、その向きを反対向きに簡単容易に変えることができる。また、縦軸30をその上端の旋回軸を中心にして旋回させると、前進方向に対するディスクユニットUの向きが変更されるとともに、またその横方向位置が変更されて左右のディスクユニットU1とU2,U3とU4の間隔が拡大又は縮小される。
そして、上記の旋回操作はディスクユニットUを支持ブラケットfに吊り下げた状態で行なわれるのでその操作は極めて簡単容易であり、また、固定ボルトを締め付けることによって縦軸30が支持ブラケットfに固定される。
したがって、ディスクユニットUの前進方向に対する向きの反対向きへの変更及びその角度の微調整、横方向間隔Bの変更及びその微調整が簡単容易である。
【0028】
なお、縦軸30を旋回させることによる左右のディスクユニットU1,U2間、又はU3,U4間の間隔Bの変化量(拡大又は縮小)は横軸20の長手方向中心に対する縦軸30の旋回軸31のずれ量(偏心量E)の4倍である。このようにして変更されたディスクユニット間の上記間隔Bが個々の圃場における畝幅等に対して適当でないときは、クランプaを緩めて支持棒F1に対する固定位置を左右方向において変更して適当に調整される。この場合も、ディスクユニットUはクランプaを介して支持棒F1に支持されているので、クランプaを緩めてその位置をずらすだけであるから、この調整操作も簡単容易である。
【0029】
以上のように、左右のディスクユニットU1,U2及びU3,U4を交互に入替える必要はなく、吊り下げたままで旋回させ、前進方向に対する向きを反対向きにし、その角度の微調整を行って固定するだけであるから、一人で簡単容易に付替えることができる。
【図面の簡単な説明】
【0030】
【図1】(a)は実施例の一部の側面図、(b)は支持ブラケットの平面図、(c)は縦軸取付け機構の断面図
【図2】はディスクユニットの排土状態の平面図
【図2−1】(a)はタイボルトの配置を模式的に示す平面図、(b)はタイボルトの配置を模式的に示す正面図
【図3】はディスクユニットの培土状態を示す平面図
【図4】はディスクユニットの構造を示す断面図
【図5】は中央に古株がある畝に対する排土作業及び培土作業の説明図
【図5−1】は、従来例による砂糖きびの根切り、培土作業機による根切り作業と畝との関係を模式的に示す平面図
【図6】は従来のディスクユニットによる排土作業の説明図
【図7】は従来のディスクユニットによる培土作業の説明図
【図8】(a)は培土作業状態にある従来のアタッチメントの背面図、(b)は図(a)におけるx−x断面図
【図9】は、2連式の従来例による根切り作業又は培土作業の作業手順を模式的に示す説明図
【図9−1】は、4連式の本発明による根切り作業又は培土作業の作業手順を模式的に示す説明図
【図10】は、実施例の平面図
【図11】は、実施例の側面図
【図12】は、実施例による砂糖きびの根切り、培土作業機による根切り作業と畝との関係を模式的に示す平面図
【発明を実施するための最良の形態】
【0031】
この発明の実施例の全体構造は、図10,図11,図12に示すとおりである。
3点ヒッチJ(図10)でトラクタに連結されて牽引されるアタッチメントのフレームFの基本構造は前後の支持棒F1,F2を有するものであり、その左右方向幅は2.2mで、図5−1の従来のもののほぼ1.5倍である。そしてその前後方向幅は620mmであり、上記従来のもののほぼ1.5倍である。
後方の支持棒F1に左右のディスクユニットU1,U2が取付けられており、前方の支持棒F2にディスクユニットU3,U4が取付けられている。そして、これらのディスクユニットU3,U4は内側のディスクユニットU1,U2よりも左右方向外側にあり、そのディスクが内側のものに対して反対向き(向かい合わせ状態又は背中合わせ状態)に向けられている。
【0032】
なお、前後の支持棒F1,F2間の間隔は従来例(図5−1)よりも広く、後方のディスクユニットU1,U2と前方のU3,U4が干渉することがないように、前後の支持棒F1,F2の間隔が決められており(図12)、この実施例では従来例のほぼ1.5倍程度である。
フレームFには,従来のものと同様にディスクユニットを押さえて地面に食い込ませるためのウエイトが搭載される。このウエイトの重さは150〜200kgで、従来のもののほぼ2.5倍である。この重さは、圃場の土質等の条件に応じて調整されるものであり、4連のディスクユニットによってその大部分が支持され、残りの一部が常に尾輪kで支持される重量である。
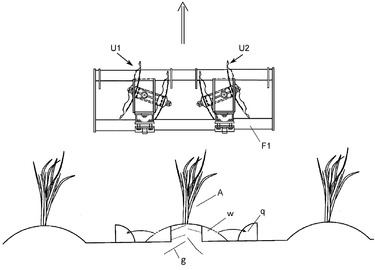
図10、図12は根切り作業の態様であり、後方の支持棒F1に支持され、その前方に配置されたディスクユニットU1,U2は左右方向の内側に向いており、前方の支持棒F2に支持され、その前方に配置されたディスクユニットU3,U4はその左右方向の外側に向いている。トラクタは一つの畝k1をまたいで走行し、この畝k1の左右両側を中央の一対のディスクユニットU1,U2のディスクで根切りし排土する。この点は従来のものと同じである。これに加えて、畝k1の左右両隣のk2、k3の内側(畝1に面した側)を根切りして、合計2畝分を一度に掘削して根切りすることになる。これらのディスクユニットU1、乃至U4の支持棒F1又はF2に対する取付け位置を容易に調整できるようになっており、この点は従来のものと違いがない。
【0033】
以上が実施例の作業機のフレームF及び当該フレームFに対する4連のディスクユニットU1乃至U4の配置の特徴的な点であるが、この実施例では、後方の支持棒F1の中央部に左右一対の尾輪k,kがあり、この尾輪を支持する支持枠Faが上記支持棒F1に固定されている。この尾輪支持枠Faに左右の尾輪支持部Fb,Fbが固定されており、これらに尾輪k、kがそれぞれ取付けられている。尾輪支持枠Faは、左右のアームと支持棒F3による平面視コ形のものであり、左右のアーム先端にクランプaがあり、当該クランプaでフレームFの上記支持棒F1に固定されている。そして、上記アームは斜め下方に傾斜しており、これによって、上記支持棒F3の位置を低くして、尾輪kに対する支持の安定性を高くしている。
【0034】
なお、この尾輪kはディスクユニットU1〜U4による掘削深さ(ディスクの食い込み深さと同じ)を規定するものであり、その支持棒F3に対する上下方向位置を調整することで上記掘削深さが加減される。従来のものは、ディスクユニットが2連であったので、ウエイトの重さの加減でディスクユニットの掘削深さを加減し、3点ヒッチJで昇降操作することによって掘削深さをほぼ一定にするようになっている。しかし、前後の支持棒F1,F2にそれぞれ2連のディスクユニットを配置した4連のものでは、前方又は後方のディスクユニットのいずれか一方(例えばU1又はU2)が地面の反力の変化で上下に変動すると、この上下変動によって他方のディスクユニット(U3及びU4)も上下に変動されるので、その掘削深さが大きく変動する。このように,4連のものでは,4連のディスクユニットの上下動が互いに影響し合って一緒に上下動するので、重量の加減と3点ヒッチによる昇降操作でこれらのディスクユニットによる掘削深さを一様に安定させることは実際上できない。この発明は、重量の加減によって4つのディスクによる掘削深さを一様に安定させることを目的として、ウエイトの総重量を重くして、ウエイトによる押し下げ力を十分に大きくし、ウエイトの重量の一部を尾輪に支持させたものである。このようにしたことによって、上記尾輪によってフレームFに対する支持高さが一定になり、4つのディスクユニットU1〜U4のディスクによる掘削深さが一様に規制される。これにより、ディスクユニットU1〜U4のディスクを下から上に押し上げる力の変動(地面の局部的な硬さの変化などによるもの)による高さ位置の変動が解消され、4連のディスクユニットの掘削深さが一様に安定する。
【0035】
この実施例のディスクユニットU1〜U4は、直径508mmのディスク10によるものであり、ディスクユニットU1とU2が後方の支持棒F1の中央部前方に配置され、また、ディスクアタッチメントU3,U4が前方の支持棒F2の左右両側部の前方に配置されている。また、上記支持棒F2の外側部後方にウエイトを載せる棚Hがある。これらの支持ブラケットfが支持棒F1、F2に取付けられている。支持棒F1,F2は角材(四角)であり、支持ブラケットfがクランプaによって支持棒F1,F2に固定されている。なお、クランプaは図8(b)のものと同じ構造によるものである。この実施例の各ディスクユニットU1乃至U4は図8の従来技術におけるものと同様に、2つのディスク10a,10b及び横軸20、回転軸21、縦軸30によって構成されている。
横軸20の両端に軸受を介して回転軸21が支承されており(図4)、当該回転軸21の両端は角軸21a,21aになっており、この角軸21a,21aにディスク10a,10bの角孔が嵌められ、ナット21bで固定されている。
【0036】
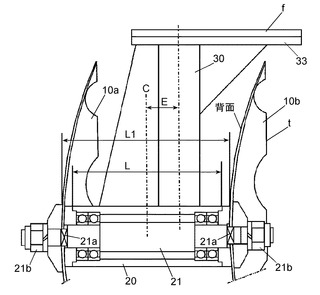
横軸20の全長Lは220mmであり(ディスク10a,10bの間隔L1は250mm)、この横軸20に縦軸(この実施例では中空軸)30の下端が固定されている。図4の状態(排土状態での右側のディスクユニット)において縦軸30が横軸20の長手方向中心Cから、背面を縦軸30に向けているディスク10の方向に偏心量Eだけずれた位置にある。この偏心量Eは、横軸20の長さ、排土作業における左右のディスクユニットU間(例えばU1,U2)の間隔Bと培土作業における左右のディスクユニットU間の間隔Bの差等を勘案して選定されるが、この実施例では50mmである。なお、縦軸30と当該縦軸30に前面(切り刃tがある面)を向けているディスク10aとの間は、ディスク10aで掘削された土が後方に通過する通路であるが、この間隔が上記偏心量Eだけ大きくなっているので、上記土の後方への通過がスムーズになり、土の連れ廻りによるディスク10aに対する回転抵抗が低減されるという利点がある。
縦軸30の上端に取付ブラケット33が溶接されており、その上方に旋回軸31が突設されている。旋回軸31の上端がネジ部32になっていて、これにナット32aが螺合されている(一部側面を示す図1参照)。
【0037】
支持ブラケットfに軸孔41があり(図1(b))、この軸孔41を中心とする円周上に2つの円弧孔42aがあり、これらの反対側に他の円弧孔(円弧状の長孔)42bがある。他方、縦軸30上端の取付ブラケット33に多数のボルト孔33aがある。旋回軸31を支持ブラケットfの軸孔41に嵌合させ、ネジ部32にナット32aを螺合させると、縦軸30が支持ブラケットfに旋回可能に吊り下げられる。そして、取付ブラケット33の多数のボルト孔33aの一つに固定ボルト34を挿入し、当該固定ボルト34を上記円弧孔42aに挿入してナット34a(図1(b))を螺合させる。他方、他のボルト孔33aに他の固定ボルト34が挿入されており、当該固定ボルトにタイボルト50のリング50aが挿入されており、当該固定ボルト34にナット34aが螺合されている。縦軸が横軸の長手方向において偏心して固着されている関係上、前進動作に対する土の抵抗によって、ディスクユニットU(例えばU1)に対して大きな旋回方向負荷がかかる。タイボルト50は取付ブラケット33を上記旋回方向負荷に対して固定するものであり、先端がロックナット51,51で支持ブラケットfのリブf1に固定されている。
【0038】
縦軸30上端の旋回軸31のネジ部32に螺合させたナット32aを締め付け、固定ボルト34に螺合させたナット34aを締め付けることによって取付ブラケット33が支持ブラケットfにリジッドに固定され、ディスクユニットUが所定の方向に向けられて固定されることになる。そして、作業時にはディスクユニットUに大きな旋回方向負荷、すなわち、縦軸を中心にしてこれを旋回させようとする大きな力がかかるが、この旋回方向負荷はタイボルト50で支持されるので、上記負荷に関わらずディスクユニットUの前進方向に対する向きが変わることはない。
なお、ディスクユニットの前進方向に対する角度を調整するに際しては、タイボルト50のロックナット51,51(図2参照)を利用することにより、当該調整を容易に行うことができる。
【0039】
固定ボルト34,34を外し、ナット32aを緩め、タイボルト50を外すと縦軸30が旋回可能になるので、ディスクユニットUが支持ブラケットfに吊り下げられた状態で、旋回軸31を中心にして旋回することができるようになる。この状態でディスクユニットUを排土状態(図6)から培土状態(図7)へ、又は培土状態から排土状態へ旋回させてその取付け状態を変更し(前進方向に対する向きがこれで反対方向に向けられる)、固定ボルト34,34をボルト孔33aおよび円弧孔42aに挿入し、タイボルト50を連結し、固定ボルトにナット34aを螺合させて締め付ける。なお、固定ボルト34が円弧孔42a,42bに挿入されているので、この範囲でディスクユニットUの前進方向に対する向き(角度)が微調整され、調整された位置で固定される。
【0040】
そして、縦軸30の位置が横軸20に対してその長手方向に偏心量E(50mm)だけずれているので、縦軸30を中心にしてディスクユニットU(例えばU1)を吊り下げたままでほぼ160度程度旋回させてほぼ反対向きに向けると、排土状態から培土状態になる。このとき、左右のディスクユニット間の間隔がほぼ200mmだけ拡開され、これによりディスクユニットU,U間の間隔Bが培土作業用の広い間隔に変更される。ディスクユニットを縦軸上端の旋回軸を中心にして旋回させて培土状態に変更されたき、そのときのディスクユニットU,U(例えばU1,U2)間の間隔Bが培土作業の条件に合わないときは、クランプaを緩めて左右に少し移動させてディスクユニット間の間隔B(図8参照)を調整すればよい。
【0041】
〔尾輪支持部〕
尾輪kは尾輪支持枠Faに高さ調整自在に取付けられていて、この高さ調整でディスクの地面への食い込み深さが調整され、その深さに規制される。
次いで、尾輪kを尾輪支持枠Faに高さ調節自在に取付け構造について説明する。
尾輪kが、尾輪支持枠Faに高さ調整可能に取付けられられている。この実施例では一つの平面視でコ形の尾輪支持枠Faの支持棒F3に左右の尾輪支持部を取付けた構造であるが、例えばY形の尾輪支持枠を左右に設け、これに尾輪支持部を設けるなどの他の構造にすることもでき、その具体的取付け構造については特別なものである必要はない。しかし、2つの尾輪がアタッチメントフレームに左右対称に配置されていることが重要である。
【0042】
この実施例では、後方の支持棒F1に尾輪支持枠Faが着脱自在に取付けられており、尾輪支持枠Faの角形の支持棒F3にブラケットFbが着脱自在に取付けられている。上記ブラケットFbは角形の中空支持部Fcを備えており、この中空支持部Fcに尾輪kの角形部材Fdが挿入されてピンで固定されている。上記中空支持部Fcと上記角形部材Fdにはピン孔Feが多数あり、これにピンが挿入されていている。上記ピンを引き抜くことによって尾輪kの高さを調節することができる。
【符号の説明】
【0043】
10:ディスク
20:横軸
21:回転軸
21b:ナット
30:縦軸
31:旋回軸
32:ネジ部
32a:ナット
33:取付ブラケット
34:固定ボルト
34a:ナット
41:軸孔
42a,42b:円弧孔
50:タイボルト
51:ロックナット
A:古株
a:クランプ
B:左右のディスクユニットの間隔
C:横軸の長手方向中心
E:偏心量
F:フレーム(アタッチメントフレーム)
F1:後方の支持棒
F2:前方の支持棒
H:ウエイトを載せる棚
J:3点ヒッチ
U1,U2,U3,U4:ディスクユニット
f:支持ブラケット
g:毛根
k:尾輪
p:砂糖きび
q:排土
t:切り刃
w、w1,w2:畝
【技術分野】
【0001】
この発明は、砂糖きび管理作業機、すなわち、根切り作業(畝の側部を掘削して排土する作業)及び培土作業(一旦排土された土を元の畝の側部に戻す作業)を行う作業機に関するものである。さらに具体的には、この管理作業を極めて能率的に行うことのできる4連式のトラクタアタッチメントに関するものであり、根切り作業と培土作業を4つのディスクユニットで一度に2畝分づつ処理するものである。
そして、根切り作業又は培土作業で同じ溝(畝の間の溝)をトラクタの車輪が繰り返し通過すると、このことによって上記溝底が踏み固められ、また荒らされるが、この発明はこのことを回避でき、また、4つのディスクユニットの掘削深さ(ディスクユニットのディスクが地面に食い込む深さ)の変動をなくして、根切りの深さ、培土の深さを安定させることができるものである。
【背景技術】
【0002】
砂糖きび管理作業に根切り作業と培土作業がある。この根切り作業は、図5(b)に示すように、中央に古株Aがある畝wの両側を掘削して畝の外側(畝と畝の間の溝の中央)に排土する作業である。また、培土作業は、図5(c)に示すように、根切りのために一旦排土した土を元の畝wの側部に戻す作業である。
以上の根切り作業及び培土作業は、砂糖きびの古株Aの毛根g(図5−1参照)を切除して新根を発育させ、古株Aを活性化させるために、収穫後の早い時期に行われる作業であって、砂糖きび栽培において従来から行われている管理作業である。
上記根切り作業を行うための作業具をハンドトラクタ(歩行式耕耘機)に装着したものが実開昭63−9808号公報に記載されているが、しかし、砂糖きびの根切り作業機を乗用トラクタのアタッチメントにした例が記載されている特許文献は見当たらない。また、ディスクユニットが左右一対の2つのディスクを備えていて、根切り作業だけでなく、培土作業も行えるようにした例(2連式のもの)が記載されている特許文献も見当たらない。
【0003】
他方、砂糖きびの根切り作業を行うものではないが、農業用トラクタ(乗用トラクタ)にアタッチメントを装着した根切り作業機が公知である。これは直刀爪によって根切りを行い、なた爪によって耕耘し、耕耘した土を排土ディスクで排土する一般的な根切り作業機である(特開2001−169603号公報)。この作業機はどのような農作物の管理作業に用いられるものかは記載されていないが、一例として、お茶の木等の多年作物が推測され、また、直刀爪で根切りし、なた爪で耕耘し、ディスクで排土するものであるから、これを用いて砂糖きびの根切り作業を行うこともできないではないものと推測することができる。
なお、このものは、なた爪で耕耘した土を「覆土ディスクで覆土」して畝を形成することができる旨記載されている(段落「0038」)が、なた爪で耕耘した土をディスクで外側に排出するものであるから、根切り作業で一旦外側に排出された土を再び畝に寄せる(培土する)ことはできず、またそのような使い方は想定されていない。
【0004】
砂糖きびの根切り及び培土が農業用トラクタの3点ヒッチに連結された根切り作業機(トラクタアタッチメント)で行われるようになっており、この根切り作業機(本発明の前提となる従来技術)は、図5−1に記載されているようなものであり、前後の支持棒(ツールバー)を有する四角なフレームの後方の支持棒F1に左右一対のディスクユニットU1,U2が装着されているものである(図5−1)。
また、このディスクユニットU1,U2の支持棒F1への配置は、本願の図6〜図8に記載されているようなものである(ただし、この従来技術が記載されている刊行物は見当たらない)。
図6〜図8に示されている従来技術は、2枚一組のディスクを備えたディスクユニットU1,U2がフレームFの支持棒F1の左右にそれぞれ装着された2連式のものである(図8)。
【0005】
後方の支持棒F1に取付けられた左右のディスクユニットU1,U2が図6に示すように進行方向に対してハの字状に配置されていて、農業用トラクタに牽引されて畝wの両側を掘削しながら左右に排土する。このときの畝wに対する左右方向の掘削幅は支持棒F1に対するディスクユニットU1,U2の取付位置で決められるものであり、左右のディスクユニットU1,U2間の間隔B(図8参照)を加減することでその広さが調節される。そして、畝幅の違いに対する調整もディスクユニットU1,U2間の間隔Bを調節することによってなされる。上下方向の掘削深さは、フレームFの棚Hに載せるウエイトの重さによって加減される。
【0006】
トラクタで牽引されると、左右のディスクユニットU1,U2の各ディスク10,10が前進方向に対してハの字状に開いた状態で回転しながら前進するので、畝の両側部の土が掘削され、外側(畝の左右両外側)に押しやられる。このとき、各ディスク10,10で砂糖きびの古株Aの近くまで掘削され、古株Aの毛根gがディスク10,10の外周の切り刃tで切除される(なお、ディスク10は、左右のディスク10a、10bの総称)。
【0007】
根切り作業で左右外側に押しやられた土(排土)は、その後、培土作業で畝wに戻される。この培土作業は、別途の農機具(土寄せ専用作業機)で行われていたが、最近、ディスク10による管理作業機を利用して行われることがある。培土作業にディスク10による管理作業機を利用できれば、培土専用機が不要であるから極めて便利である。
ディスク10による管理作業機で培土(又は土寄せ)作業を行うときは、ディスクユニットU1,U2は前方に向けて開いた逆ハの字状に取付けられ、ディスク10が回転しながら前進することにより、両側の土(排土)qが畝wの方に押しやられる(図7)。
【0008】
上記の根切り作業(以下、「排土作業」ともいう)及び培土作業(以下、「土寄せ作業」ともいう)で使用されるディスクユニットU1,U2のディスク10は、ほぼ半球状のディスクであり、その外周に切り刃tがある。他方、根切り作業と培土作業とで左右のディスクの前進方向に対する向きが反対であり、また、左右のディスクユニットU1,U2間の間隔B(図8参照)が全く違う。このために、上記両作業に応じて支持棒F1に対して左右のディスクユニットU1,U2を交互に付け替える必要がある。したがって、左右のディスクユニットU1,U2を交互に入れ替え、さらに、支持棒F1に対する取付け角度及び取付け位置を変更する必要がある。
【0009】
ディスクユニットUの構造は種々であるが、図示の例では中空の横軸(横方向軸状ハウジング)20に縦軸(縦方向の支持軸)30が固着されており、横軸20に回転軸が回転自在に支承されており、この回転軸の両端にディスク10がそれぞれ着脱自在に取付けられている(図4参照)。ディスクユニットUの支持棒F1への取付機構は次のとおりである。すなわち、縦軸30の上端の取付ブラケット33が支持ブラケットfに着脱自在に取付けられており、当該支持ブラケットfが支持棒F1にクランプaで着脱自在に取付けられている。支持棒F1は中空角材である。クランプa(図2におけるクランプaと同じ)は把持板a1,a2、ボルトb1によるものであり、把持板a1,a2で支持棒F1を鋏み、ボルトb1で締め付けて支持棒F1に固定されている。そしてクランプaに支持ブラケットfが取付けられており、縦軸30の上端に取付ブラケット33が溶接されている。支持ブラケットfに上記取付ブラケット33を取付ける機構は、固定ボルト34と取付ブラケット33のボルト孔と支持ブラケットfの長孔(円弧状の長孔)によるものであって、左右のディスクユニットU1,U2の前進方向に対する角度を上記長孔を利用して調整することができる。
【0010】
そして、縦軸30の取付ブラケット33が支持ブラケットf、クランプaを介して支持棒F1に着脱自在に固着されていることで、左右のディスクユニットU1,U2の前進方向に対する向きを変更し、またこれら間の間隔Bを変更することができる。 排土作業と培土作業の変更に伴ってディスクユニットU1,U2の付替えを行うには、縦軸30を支持棒F1の支持ブラケットfから外し、左右のディスクユニットU1,U2をその向きを変えないで交互に入替え、これらの取付け位置を変更し、前進方向に対する角度αを微調整することが必要である。
【0011】
他方、一対のディスク10,10、回転軸21、横軸20、縦軸30等からなるディスクユニットUは極めて重く(例えば50kg)、このためその取外し作業、取付け作業が困難で、かつ危険であり、また、支持棒F1から外されて地面に置かれると転がり易くて安定性が悪いので、支持棒F1から一旦外して付替える作業を一人で行うのは困難であり、また安全上の問題が大きい。このために、排土作業と培土作業が変更されるとき、これに伴うディスクユニットU1,U2を付替える作業を簡単容易に行えるようにすることが求められる。
【0012】
左右のディスクユニットU1,U2を支持棒F1から取外さないで、これらを支持棒に対して付替えられれば、この付替え作業を一人で容易に行えるので便利であり、また安全である。そしてそのためには、左右のディスクユニットUを支持ブラケットfに支持させたままで前進方向に対する向きを反対方向に容易に変更することができ、また、左右方向の位置を容易に変更できるようにすることが必要である。
従来の2連式のものでは2個のディスクユニットUの付替えであるが、作業能力を高めるために4連式にすればその場合のディスクユニットの上記付替えは4個であるから、この付替え作業が極めて困難になるので、上記問題がなお一層重大な問題になる。
【0013】
ところで、砂糖きびの管理作業機(あるいは根切り作業機)では、トラクタのホイールベースが約1.8m、トラクタとアタッチメントによる作業機全長が4mであり、これに対して砂糖きびの畝の間隔は1.1〜1.2mであってトラクタのホイールベースに比して比較的狭い。2連のディスクユニットによって一つの畝の両側を根切りし、又は培土することになるので、根切り作業、培土作業は、管理作業機の操向性から、一畝おきになされるのが一般的なやり方である。これを模式的に示せば図9のようになる。このような作業の運びでは、トラクタの車輪が根切り作業で畝間の溝を2回通過し、また、培土作業で2回通過するので、合計4回通過することになる。このようにトラクタの車輪が畝間の溝を繰り返し通過すると、通過する回数が多いほど溝底が踏み固められ、また、荒らされることになる。このことは、砂糖きびのその後の生育にとっては好ましくないことであるが、ディスクユニットが2連のもの、すなわち2連式の従来の管理作業機では避けられない問題である。
【0014】
したがって、砂糖きびの管理作業機について、当該作業機の車輪で畝間の溝底が踏み固められ、荒らされることを可及的に軽減することが求められる。
他方、根切り作業、培土作業の能力を向上させるために、ディスクユニットを4個のもの、すなわち4連のものにすることが望まれる。畝の長さが1km以上にも及ぶ外国では特にこのことが望まれる。
農作業機において作業能力を高めるために、横一列に配置した作業具を左右対称に増やして4連式、6連式のものにすることは、他の作業機(例えば、稲の植付け機、刈取り機など)で周知であるが、砂糖きび管理作業機では、横一列のディスクユニットを増設して4連にすることには重大な問題がある。このため、4連式にするに当たっては、アタッチメントフレームFに4つのディスクユニットをどのように配置するかについて、作業性を考慮した(フレームにかかる力の左右のバランスが保持され、また、畝幅に合わせるためのディスクユニットの位置調整に支障がないことなど)特別の配置を工夫する必要があり、また、根切り作業と培土作業の切り換えに伴うディスクユニットの付替えに支障がなく、かつ簡便に行えることが必要である。もしそうでなければ、実際問題として一般農家の手に余るので、4連のものが一般農家に普及するのは難しいものと思われる。
そしてまた、4連のディスクユニットの掘削深さを従来の方式(ウエイトの重さの調整と3点ヒッチの昇降操作で掘削深さを調節する方式)で一様に安定させることは極めて困難であり、その結果、掘削深さが大きく変動する。したがって、上記掘削深さを一様に安定させるために、フレームFの高さ位置を安定させるようにフレーム支持機構を工夫する必要がある。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】実開昭63−9808号公報
【特許文献2】特開2001−169603号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
この発明の課題は、砂糖きびの根切り、培土作業を行う管理作業機を4連式のもの(ディスクユニットを4つを備えているもの)にするについて、(i)根切り作業又は培土作業の作業性を考慮して、4連のディスクユニットのアタッチメントフレームへの配置及びアタッチメントフレームに対する支持機構を工夫し、また、(ii)4連のディスクユニットについてアタッチメントフレームから取り外さないで、前後方向の向きを反対向きに変更し、また前後方向に対する角度を微調整することができ、かつ左右のディスクユニット間の間隔Bを変更し、微調整することができるように、ディスクユニットの上記支持棒F1への取付け機構を工夫することであり、そしてまた、(iii)4連のディスクユニットによる掘削深さを一様に安定させるためのフレーム支持機構を工夫することである。
【課題を解決するための手段】
【0017】
〔解決手段1〕
上記課題を解決するための手段は、上記の課題(i)を解決するための手段であり、農業用トラクタに連結されるアタッチメントであり、アタッチメントフレームF後方の支持棒F1に左右一対のディスクユニットU1,U2が固定されていて、前進することで畝の両側部を根切りし、又は、培土する砂糖きび管理作業機であって、上記ディスクユニットU1,U2が横軸20及び縦軸30を有し、横軸20に回転自在に支承された回転軸21を有し、当該回転軸21の両端にディスク10,10がそれぞれ固定されており、上記支持棒F1にクランプによって支持ブラケットfが固定されており、上記縦軸30の取付ブラケット33が上記支持ブラケットfに取付けられている砂糖きびの管理作業機について、次の(a)(b)(c)によるものである。
(a)上記アタッチメントフレーム前方の支持棒F2に他の左右一対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取付けられており、当該一対のディスクユニットU3,U4が後方の支持棒F1の左右のディスクユニットU1,U2よりも左右方向外側にあり、
(b)前方の支持棒F2の左右のディスクユニットU3,U4は、後方の支持棒F1の左右のディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、
(c)後方の支持棒F1の左右のディスクユニットF1,U2によって根切りされ、又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取付けられていること。
【0018】
ディスクユニットの数を4,6,8と増加させれば、一度に2つ,3つ,4つの畝を処理(根切り処理、培土処理)することになり、作業能力が高くなるのは自明のことであるが、ディスク間の間隔は、畝の幅、畝間の間隔によって決まることであり、同時に処理される畝の数が増加するほど、左右両端のディスクユニット間の間隔が大きくなる。
他方、ディスクユニットのディスクは地面に押し込まれた状態でトラクタに牽引されて回転し、地面を掘削し、左右に排出しながら前進するものである。そして、このディスクの前進に対しては大きな抵抗がかかり、この抵抗の大きさは上記ディスクの食い込み深さの変動によって大きく変動する。そして、この抵抗の左右のアンバランスによってトラクタが左右に振られて直進性が阻害され、左右両端のディスクユニット間の間隔が広いほど上記抵抗の変動の直進性に対する影響が大きく、これが一定の限界を超えると、運転操作で直進走行させることは不可能になる。
【0019】
ところで、解決手段1による砂糖きびの管理作業機では、右側、左側のそれぞれ2つのディスクユニット(U1とU3、U2とU4)が配置されており、U3とU4間の間隔は従来のもののディスクユニットU1とU2間の間隔のほぼ2倍程度であり、この程度であれば、運転操作によってトラクタを直進させることができる。
また、ディスクユニットU3,U4の前方の支持棒F2に対する前後方向の位置関係、ディスクユニットU1,U2の後方の支持棒F1に対する前後方向の位置関係は、前方のディスクユニットU3,U4と後方のディスクユニットU1,U2が互いに干渉しなければ、適宜選択できることであるが、共に各支持棒の前方に位置しているのが基本である。なぜなら、3点ヒッチJにかかる負荷が最も小さく、したがって、構造設計の都合、また3点ヒッチによる昇降操作の都合から最も有利であるからである。他方、この他の配置には格別の利点がない。
また、ディスクユニットU3,U4がディスクユニットU1,U2に対して向かい合わせ、背中合わせにするのは、ディスクユニットU1,U2によって掘削され又は培土される畝の隣の畝の内側を掘削し、又は培土することとの関連から必要不可欠の事項である。なぜなら、ディスクユニットU1,U2と同じ方向に向けると、ディスクユニットU1,U2とともに根切り作業、培土作業を行うことはできないからである。
【0020】
さらに、フレームFの後方の支持棒F1に4つのディスユニットが装着されると、隣接するディスクユニットが、互いに干渉するのでこのような配置はできないが、解決手段1による場合は、隣接するディスクユニットが前後方向にずれているのでこれらが互いに干渉するとはなく、この配置によって、4連のディスクユニットを集約的に配置することができる。
【0021】
〔解決手段1の実施態様〕
解決手段1の実施態様は、上記の課題(iii)の解決手段であり、解決手段1による砂糖きびの管理作業機について、(d)後方の横方向支持棒F1の中央部に尾輪支持枠Faが固定されており、この尾輪支持枠Faに尾輪支持部があり、当該尾輪支持部に左右一対の尾輪kが取付けられていることである。
【0022】
〔解決手段2〕
解決手段2は、上記の課題(ii)の解決手段であり、上記解決手段1又は上記実施態様による砂糖きびの管理作業機について、次の(イ)(ロ)(ハ)によるものである。
(イ)上記ディスクユニットU1乃至U4の縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
(ロ)上記縦軸30の旋回軸31による旋回中心が上記横軸20の長手方向中心から所定偏心量Eだけ長手方向にずれており、
(ハ)上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記取付ブラケット33のボルト孔及び上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が支持ブラケットfに固定され、縦軸30が固定されるようになっていること。
なお、上記の旋回中心のずれは、一対のディスクのうち、縦軸30に背面を向けているディスクの方向への偏心である。
【0023】
固定ボルトを外すと、ディスクユニットの縦軸30は支持ブラケットfに吊り下げられたままで旋回できるようになる。ディスクユニットUを旋回させると、ディスクユニットの前進方向に対する向き(角度)が反対向きに変わる。そして、横軸20の長手方向においてずれた位置に縦軸30が固定されているので、旋回することによって上記支持棒F1に対するディスクユニットUの横方向位置が上記偏心量Eの2倍だけ外方又は内方に変化し、その結果、左右のディスクユニットU間の間隔Bが拡大又は縮小される。その後、固定ボルトを取付ブラケットのボルト孔及び支持ブラケットの長孔に挿入し、これにナットを螺合させて締め付けると、ディスクユニットが調整された横方向位置及び旋回方向位置において固定される。
【0024】
なお、支持ブラケットfの長孔は、縦軸30の旋回方向位置の調整を可能にするものであるから、これを複数の孔によるものに変更することもできる。
また、上記要件(ロ)によって、縦軸30の旋回軸31を中心にして旋回するときに左右のディスクユニットの間隔が排土状態から培土状態へ、又は培土状態から排土状態へその向きと間隔とが機械的に変更されるが、当該要件(ロ)がなければこの機能を奏することはできない。しかし、当該要件(ロ)がなくても、ディスクユニットの前進方向に対する向きの反対向きへの変更を簡単容易に行うことはできる。この場合は、クランプaを緩めて左右のディスクユニットの間隔をその後の管理作業に適した間隔に変更する必要がある。
【発明の効果】
【0025】
〔解決手段1による発明〕
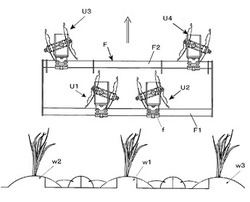
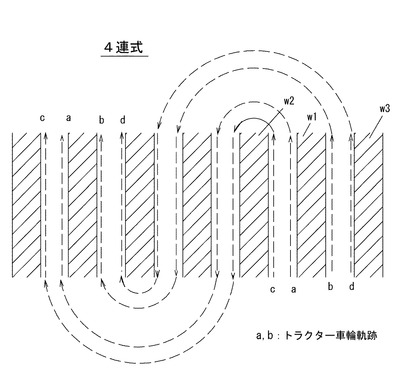
解決手段1による発明の砂糖きびの管理作業機による場合は、根切り作業(又は培土作業)が例えば図9−1に示す運びで行われるのが一般的である。これは、一つおきの畝kをまたいで往復され、この往復で圃場の一方から他方に向かって作業が順次進められる。したがって、例えば根切り作業で同じ溝が2度踏み固められることはなく、一つおきの溝は踏み固められずに済むことになる。そして、従来のもの(図9)のように、圃場の一方から他方に向かって順次進められ、他方から一方に向かって同作業が繰り返されることはないので、作業性に優れ、作業能率が大幅に向上する。
また、この発明によるディスクユニットの取付け構造特有の次の(A)(B)(C)の作用を奏する。
(A)フレームの前方の支持棒F2には、3点ヒッチとの連結手段、ウエイト棚など種々の部材が設けられるが、ウエイト棚の支持構造を工夫することにより、前方の支持棒F2の左右外側部の前方にディスクユニットU3,U4を装着し、かつ左右方向の位置を調整自在にすることが可能であるので、フレームの左右方向幅の増分を可及的に抑制しながら、これに左右一対のディスクユニットU3,U4を支持させることができる。
(B)アタッチメントの左右方向幅の増分は小さいので、作業機の圃場での旋回に格別の支障を来すことはなく、したがって、実用性が阻害されることはない。
(C)左右のディスクユニット間の最大間隔が、2連の従来例のものの最大間隔のほぼ1.8〜1.9倍程度であり、ディスクユニットにかかる抵抗の変動によってトラクタの直進性が著しく阻害されることはなく、したがって、トラクタを畝にそって直進走行させることができる。
【0026】
〔解決手段1の実施態様〕
解決手段1の上記実施態様によれば、作業機の重量の一部を尾輪kで支持し、この尾輪kの高さでディスクユニットによる掘削深さ(ディスクの地面への食い込み深さ)を確実に規制することができる。すなわち、作業機にかけるウエイトを十分に重くし、その一部を尾輪kに分担させることにより、ディスクを下から押し上げる力の変動による4つのディスクユニットU1〜U4の浮き上がりを防止して、その地面への食い込み深さ(掘削深さへ)の影響を低減し、これらを尾輪kによる支持高さに一様に安定にさせることができる。
【0027】
〔解決手段2による発明〕
解決手段2による発明は、上記「解決手段1による発明」の効果に加えて、次の効果を奏する。
ディスクユニットU(U1〜U4)の縦軸30が上端に旋回軸31を有し、アタッチメントフレームの支持棒F1,F2に固定された支持ブラケットfに旋回自在に支持されているので、ディスクユニットUを支持ブラケットfに吊り下げた状態で旋回させて、その向きを反対向きに簡単容易に変えることができる。また、縦軸30をその上端の旋回軸を中心にして旋回させると、前進方向に対するディスクユニットUの向きが変更されるとともに、またその横方向位置が変更されて左右のディスクユニットU1とU2,U3とU4の間隔が拡大又は縮小される。
そして、上記の旋回操作はディスクユニットUを支持ブラケットfに吊り下げた状態で行なわれるのでその操作は極めて簡単容易であり、また、固定ボルトを締め付けることによって縦軸30が支持ブラケットfに固定される。
したがって、ディスクユニットUの前進方向に対する向きの反対向きへの変更及びその角度の微調整、横方向間隔Bの変更及びその微調整が簡単容易である。
【0028】
なお、縦軸30を旋回させることによる左右のディスクユニットU1,U2間、又はU3,U4間の間隔Bの変化量(拡大又は縮小)は横軸20の長手方向中心に対する縦軸30の旋回軸31のずれ量(偏心量E)の4倍である。このようにして変更されたディスクユニット間の上記間隔Bが個々の圃場における畝幅等に対して適当でないときは、クランプaを緩めて支持棒F1に対する固定位置を左右方向において変更して適当に調整される。この場合も、ディスクユニットUはクランプaを介して支持棒F1に支持されているので、クランプaを緩めてその位置をずらすだけであるから、この調整操作も簡単容易である。
【0029】
以上のように、左右のディスクユニットU1,U2及びU3,U4を交互に入替える必要はなく、吊り下げたままで旋回させ、前進方向に対する向きを反対向きにし、その角度の微調整を行って固定するだけであるから、一人で簡単容易に付替えることができる。
【図面の簡単な説明】
【0030】
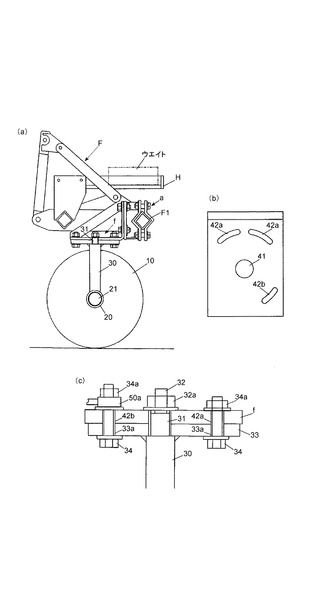
【図1】(a)は実施例の一部の側面図、(b)は支持ブラケットの平面図、(c)は縦軸取付け機構の断面図
【図2】はディスクユニットの排土状態の平面図
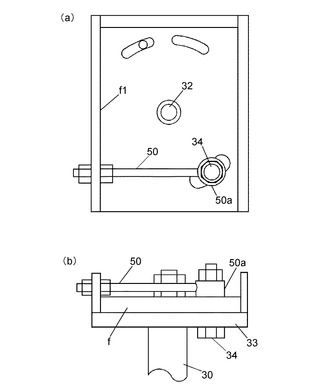
【図2−1】(a)はタイボルトの配置を模式的に示す平面図、(b)はタイボルトの配置を模式的に示す正面図
【図3】はディスクユニットの培土状態を示す平面図
【図4】はディスクユニットの構造を示す断面図
【図5】は中央に古株がある畝に対する排土作業及び培土作業の説明図
【図5−1】は、従来例による砂糖きびの根切り、培土作業機による根切り作業と畝との関係を模式的に示す平面図
【図6】は従来のディスクユニットによる排土作業の説明図
【図7】は従来のディスクユニットによる培土作業の説明図
【図8】(a)は培土作業状態にある従来のアタッチメントの背面図、(b)は図(a)におけるx−x断面図
【図9】は、2連式の従来例による根切り作業又は培土作業の作業手順を模式的に示す説明図
【図9−1】は、4連式の本発明による根切り作業又は培土作業の作業手順を模式的に示す説明図
【図10】は、実施例の平面図
【図11】は、実施例の側面図
【図12】は、実施例による砂糖きびの根切り、培土作業機による根切り作業と畝との関係を模式的に示す平面図
【発明を実施するための最良の形態】
【0031】
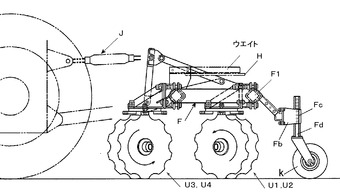
この発明の実施例の全体構造は、図10,図11,図12に示すとおりである。
3点ヒッチJ(図10)でトラクタに連結されて牽引されるアタッチメントのフレームFの基本構造は前後の支持棒F1,F2を有するものであり、その左右方向幅は2.2mで、図5−1の従来のもののほぼ1.5倍である。そしてその前後方向幅は620mmであり、上記従来のもののほぼ1.5倍である。
後方の支持棒F1に左右のディスクユニットU1,U2が取付けられており、前方の支持棒F2にディスクユニットU3,U4が取付けられている。そして、これらのディスクユニットU3,U4は内側のディスクユニットU1,U2よりも左右方向外側にあり、そのディスクが内側のものに対して反対向き(向かい合わせ状態又は背中合わせ状態)に向けられている。
【0032】
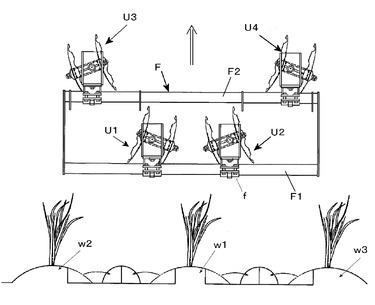
なお、前後の支持棒F1,F2間の間隔は従来例(図5−1)よりも広く、後方のディスクユニットU1,U2と前方のU3,U4が干渉することがないように、前後の支持棒F1,F2の間隔が決められており(図12)、この実施例では従来例のほぼ1.5倍程度である。
フレームFには,従来のものと同様にディスクユニットを押さえて地面に食い込ませるためのウエイトが搭載される。このウエイトの重さは150〜200kgで、従来のもののほぼ2.5倍である。この重さは、圃場の土質等の条件に応じて調整されるものであり、4連のディスクユニットによってその大部分が支持され、残りの一部が常に尾輪kで支持される重量である。
図10、図12は根切り作業の態様であり、後方の支持棒F1に支持され、その前方に配置されたディスクユニットU1,U2は左右方向の内側に向いており、前方の支持棒F2に支持され、その前方に配置されたディスクユニットU3,U4はその左右方向の外側に向いている。トラクタは一つの畝k1をまたいで走行し、この畝k1の左右両側を中央の一対のディスクユニットU1,U2のディスクで根切りし排土する。この点は従来のものと同じである。これに加えて、畝k1の左右両隣のk2、k3の内側(畝1に面した側)を根切りして、合計2畝分を一度に掘削して根切りすることになる。これらのディスクユニットU1、乃至U4の支持棒F1又はF2に対する取付け位置を容易に調整できるようになっており、この点は従来のものと違いがない。
【0033】
以上が実施例の作業機のフレームF及び当該フレームFに対する4連のディスクユニットU1乃至U4の配置の特徴的な点であるが、この実施例では、後方の支持棒F1の中央部に左右一対の尾輪k,kがあり、この尾輪を支持する支持枠Faが上記支持棒F1に固定されている。この尾輪支持枠Faに左右の尾輪支持部Fb,Fbが固定されており、これらに尾輪k、kがそれぞれ取付けられている。尾輪支持枠Faは、左右のアームと支持棒F3による平面視コ形のものであり、左右のアーム先端にクランプaがあり、当該クランプaでフレームFの上記支持棒F1に固定されている。そして、上記アームは斜め下方に傾斜しており、これによって、上記支持棒F3の位置を低くして、尾輪kに対する支持の安定性を高くしている。
【0034】
なお、この尾輪kはディスクユニットU1〜U4による掘削深さ(ディスクの食い込み深さと同じ)を規定するものであり、その支持棒F3に対する上下方向位置を調整することで上記掘削深さが加減される。従来のものは、ディスクユニットが2連であったので、ウエイトの重さの加減でディスクユニットの掘削深さを加減し、3点ヒッチJで昇降操作することによって掘削深さをほぼ一定にするようになっている。しかし、前後の支持棒F1,F2にそれぞれ2連のディスクユニットを配置した4連のものでは、前方又は後方のディスクユニットのいずれか一方(例えばU1又はU2)が地面の反力の変化で上下に変動すると、この上下変動によって他方のディスクユニット(U3及びU4)も上下に変動されるので、その掘削深さが大きく変動する。このように,4連のものでは,4連のディスクユニットの上下動が互いに影響し合って一緒に上下動するので、重量の加減と3点ヒッチによる昇降操作でこれらのディスクユニットによる掘削深さを一様に安定させることは実際上できない。この発明は、重量の加減によって4つのディスクによる掘削深さを一様に安定させることを目的として、ウエイトの総重量を重くして、ウエイトによる押し下げ力を十分に大きくし、ウエイトの重量の一部を尾輪に支持させたものである。このようにしたことによって、上記尾輪によってフレームFに対する支持高さが一定になり、4つのディスクユニットU1〜U4のディスクによる掘削深さが一様に規制される。これにより、ディスクユニットU1〜U4のディスクを下から上に押し上げる力の変動(地面の局部的な硬さの変化などによるもの)による高さ位置の変動が解消され、4連のディスクユニットの掘削深さが一様に安定する。
【0035】
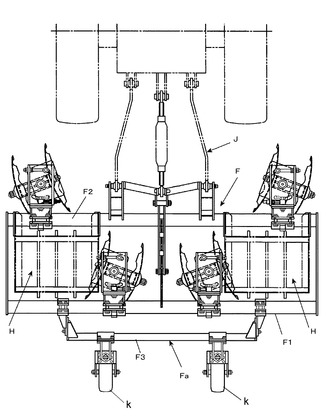
この実施例のディスクユニットU1〜U4は、直径508mmのディスク10によるものであり、ディスクユニットU1とU2が後方の支持棒F1の中央部前方に配置され、また、ディスクアタッチメントU3,U4が前方の支持棒F2の左右両側部の前方に配置されている。また、上記支持棒F2の外側部後方にウエイトを載せる棚Hがある。これらの支持ブラケットfが支持棒F1、F2に取付けられている。支持棒F1,F2は角材(四角)であり、支持ブラケットfがクランプaによって支持棒F1,F2に固定されている。なお、クランプaは図8(b)のものと同じ構造によるものである。この実施例の各ディスクユニットU1乃至U4は図8の従来技術におけるものと同様に、2つのディスク10a,10b及び横軸20、回転軸21、縦軸30によって構成されている。
横軸20の両端に軸受を介して回転軸21が支承されており(図4)、当該回転軸21の両端は角軸21a,21aになっており、この角軸21a,21aにディスク10a,10bの角孔が嵌められ、ナット21bで固定されている。
【0036】
横軸20の全長Lは220mmであり(ディスク10a,10bの間隔L1は250mm)、この横軸20に縦軸(この実施例では中空軸)30の下端が固定されている。図4の状態(排土状態での右側のディスクユニット)において縦軸30が横軸20の長手方向中心Cから、背面を縦軸30に向けているディスク10の方向に偏心量Eだけずれた位置にある。この偏心量Eは、横軸20の長さ、排土作業における左右のディスクユニットU間(例えばU1,U2)の間隔Bと培土作業における左右のディスクユニットU間の間隔Bの差等を勘案して選定されるが、この実施例では50mmである。なお、縦軸30と当該縦軸30に前面(切り刃tがある面)を向けているディスク10aとの間は、ディスク10aで掘削された土が後方に通過する通路であるが、この間隔が上記偏心量Eだけ大きくなっているので、上記土の後方への通過がスムーズになり、土の連れ廻りによるディスク10aに対する回転抵抗が低減されるという利点がある。
縦軸30の上端に取付ブラケット33が溶接されており、その上方に旋回軸31が突設されている。旋回軸31の上端がネジ部32になっていて、これにナット32aが螺合されている(一部側面を示す図1参照)。
【0037】
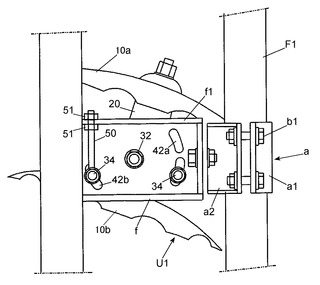
支持ブラケットfに軸孔41があり(図1(b))、この軸孔41を中心とする円周上に2つの円弧孔42aがあり、これらの反対側に他の円弧孔(円弧状の長孔)42bがある。他方、縦軸30上端の取付ブラケット33に多数のボルト孔33aがある。旋回軸31を支持ブラケットfの軸孔41に嵌合させ、ネジ部32にナット32aを螺合させると、縦軸30が支持ブラケットfに旋回可能に吊り下げられる。そして、取付ブラケット33の多数のボルト孔33aの一つに固定ボルト34を挿入し、当該固定ボルト34を上記円弧孔42aに挿入してナット34a(図1(b))を螺合させる。他方、他のボルト孔33aに他の固定ボルト34が挿入されており、当該固定ボルトにタイボルト50のリング50aが挿入されており、当該固定ボルト34にナット34aが螺合されている。縦軸が横軸の長手方向において偏心して固着されている関係上、前進動作に対する土の抵抗によって、ディスクユニットU(例えばU1)に対して大きな旋回方向負荷がかかる。タイボルト50は取付ブラケット33を上記旋回方向負荷に対して固定するものであり、先端がロックナット51,51で支持ブラケットfのリブf1に固定されている。
【0038】
縦軸30上端の旋回軸31のネジ部32に螺合させたナット32aを締め付け、固定ボルト34に螺合させたナット34aを締め付けることによって取付ブラケット33が支持ブラケットfにリジッドに固定され、ディスクユニットUが所定の方向に向けられて固定されることになる。そして、作業時にはディスクユニットUに大きな旋回方向負荷、すなわち、縦軸を中心にしてこれを旋回させようとする大きな力がかかるが、この旋回方向負荷はタイボルト50で支持されるので、上記負荷に関わらずディスクユニットUの前進方向に対する向きが変わることはない。
なお、ディスクユニットの前進方向に対する角度を調整するに際しては、タイボルト50のロックナット51,51(図2参照)を利用することにより、当該調整を容易に行うことができる。
【0039】
固定ボルト34,34を外し、ナット32aを緩め、タイボルト50を外すと縦軸30が旋回可能になるので、ディスクユニットUが支持ブラケットfに吊り下げられた状態で、旋回軸31を中心にして旋回することができるようになる。この状態でディスクユニットUを排土状態(図6)から培土状態(図7)へ、又は培土状態から排土状態へ旋回させてその取付け状態を変更し(前進方向に対する向きがこれで反対方向に向けられる)、固定ボルト34,34をボルト孔33aおよび円弧孔42aに挿入し、タイボルト50を連結し、固定ボルトにナット34aを螺合させて締め付ける。なお、固定ボルト34が円弧孔42a,42bに挿入されているので、この範囲でディスクユニットUの前進方向に対する向き(角度)が微調整され、調整された位置で固定される。
【0040】
そして、縦軸30の位置が横軸20に対してその長手方向に偏心量E(50mm)だけずれているので、縦軸30を中心にしてディスクユニットU(例えばU1)を吊り下げたままでほぼ160度程度旋回させてほぼ反対向きに向けると、排土状態から培土状態になる。このとき、左右のディスクユニット間の間隔がほぼ200mmだけ拡開され、これによりディスクユニットU,U間の間隔Bが培土作業用の広い間隔に変更される。ディスクユニットを縦軸上端の旋回軸を中心にして旋回させて培土状態に変更されたき、そのときのディスクユニットU,U(例えばU1,U2)間の間隔Bが培土作業の条件に合わないときは、クランプaを緩めて左右に少し移動させてディスクユニット間の間隔B(図8参照)を調整すればよい。
【0041】
〔尾輪支持部〕
尾輪kは尾輪支持枠Faに高さ調整自在に取付けられていて、この高さ調整でディスクの地面への食い込み深さが調整され、その深さに規制される。
次いで、尾輪kを尾輪支持枠Faに高さ調節自在に取付け構造について説明する。
尾輪kが、尾輪支持枠Faに高さ調整可能に取付けられられている。この実施例では一つの平面視でコ形の尾輪支持枠Faの支持棒F3に左右の尾輪支持部を取付けた構造であるが、例えばY形の尾輪支持枠を左右に設け、これに尾輪支持部を設けるなどの他の構造にすることもでき、その具体的取付け構造については特別なものである必要はない。しかし、2つの尾輪がアタッチメントフレームに左右対称に配置されていることが重要である。
【0042】
この実施例では、後方の支持棒F1に尾輪支持枠Faが着脱自在に取付けられており、尾輪支持枠Faの角形の支持棒F3にブラケットFbが着脱自在に取付けられている。上記ブラケットFbは角形の中空支持部Fcを備えており、この中空支持部Fcに尾輪kの角形部材Fdが挿入されてピンで固定されている。上記中空支持部Fcと上記角形部材Fdにはピン孔Feが多数あり、これにピンが挿入されていている。上記ピンを引き抜くことによって尾輪kの高さを調節することができる。
【符号の説明】
【0043】
10:ディスク
20:横軸
21:回転軸
21b:ナット
30:縦軸
31:旋回軸
32:ネジ部
32a:ナット
33:取付ブラケット
34:固定ボルト
34a:ナット
41:軸孔
42a,42b:円弧孔
50:タイボルト
51:ロックナット
A:古株
a:クランプ
B:左右のディスクユニットの間隔
C:横軸の長手方向中心
E:偏心量
F:フレーム(アタッチメントフレーム)
F1:後方の支持棒
F2:前方の支持棒
H:ウエイトを載せる棚
J:3点ヒッチ
U1,U2,U3,U4:ディスクユニット
f:支持ブラケット
g:毛根
k:尾輪
p:砂糖きび
q:排土
t:切り刃
w、w1,w2:畝
【特許請求の範囲】
【請求項1】
農業用トラクタに連結されるアタッチメントであり、アタッチメントフレームF後方の支持棒F1に左右一対のディスクユニットU1,U2が固定されていて、前進することで畝の両側部を根切りし、又は、培土する砂糖きび管理作業機であって、上記ディスクユニットU1,U2が横軸20及び縦軸30を有し、横軸20に回転自在に支承された回転軸21を有し、当該回転軸21の両端にディスク10,10がそれぞれ固定されており、上記支持棒F1にクランプによって支持ブラケットfが固定されており、上記縦軸30の取付ブラケット33が上記支持ブラケットfに取付けられている砂糖きびの管理作業機において、
上記アタッチメントフレーム前方の支持棒F2に他の左右一対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取付けられており、当該一対のディスクユニットU3,U4が後方の支持棒F1の左右のディスクユニットU1,U2よりも左右方向外側にあり、
上記ディスクユニットU3,U4は、上記ディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、上記ディスクユニットU1,U2によって根切りされ又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取付けられていることを特徴とする砂糖きび管理作業機。
【請求項2】
請求項1の砂糖きびの管理作業機において、後方の支持棒F1の中央部に尾輪支持枠が固定されており、この尾輪支持枠に尾輪支持部があり、当該尾輪支持部に高さ調整自在に尾輪kがそれぞれ取付けられていることを特徴とする砂糖きび管理作業機。
【請求項3】
上記ディスクユニットU1,U2の上記縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が上記支持ブラケットfに固定され、上記縦軸30が固定されるようになっている請求項1又は請求項2の砂糖きび管理作業機。
【請求項4】
上記ディスクユニットU1,U2の上記縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
上記縦軸30の旋回軸31による旋回中心が上記横軸20の長手方向中心から長手方向にずれており、
上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が支持ブラケットfに固定され、縦軸30が固定されるようになっている請求項1又は請求項2の砂糖きび管理作業機。
【請求項1】
農業用トラクタに連結されるアタッチメントであり、アタッチメントフレームF後方の支持棒F1に左右一対のディスクユニットU1,U2が固定されていて、前進することで畝の両側部を根切りし、又は、培土する砂糖きび管理作業機であって、上記ディスクユニットU1,U2が横軸20及び縦軸30を有し、横軸20に回転自在に支承された回転軸21を有し、当該回転軸21の両端にディスク10,10がそれぞれ固定されており、上記支持棒F1にクランプによって支持ブラケットfが固定されており、上記縦軸30の取付ブラケット33が上記支持ブラケットfに取付けられている砂糖きびの管理作業機において、
上記アタッチメントフレーム前方の支持棒F2に他の左右一対のディスクユニットU3,U4が同様にして配置され、上記支持ブラケットfに取付けられており、当該一対のディスクユニットU3,U4が後方の支持棒F1の左右のディスクユニットU1,U2よりも左右方向外側にあり、
上記ディスクユニットU3,U4は、上記ディスクユニットU1,U2に対して向かい合わせ又は背中合わせになっていて、上記ディスクユニットU1,U2によって根切りされ又は培土される畝の隣の畝の内側を根切りし、又は培土する位置に取付けられていることを特徴とする砂糖きび管理作業機。
【請求項2】
請求項1の砂糖きびの管理作業機において、後方の支持棒F1の中央部に尾輪支持枠が固定されており、この尾輪支持枠に尾輪支持部があり、当該尾輪支持部に高さ調整自在に尾輪kがそれぞれ取付けられていることを特徴とする砂糖きび管理作業機。
【請求項3】
上記ディスクユニットU1,U2の上記縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が上記支持ブラケットfに固定され、上記縦軸30が固定されるようになっている請求項1又は請求項2の砂糖きび管理作業機。
【請求項4】
上記ディスクユニットU1,U2の上記縦軸30の上端に旋回軸31があり、縦軸30が上記支持ブラケットfに対して旋回可能に支持されており、
上記縦軸30の旋回軸31による旋回中心が上記横軸20の長手方向中心から長手方向にずれており、
上記縦軸30の取付ブラケット33を上記支持ブラケットfに固定する固定ボルト34が上記支持ブラケットfの長孔に挿入されており、当該固定ボルト34で取付ブラケット33が支持ブラケットfに固定され、縦軸30が固定されるようになっている請求項1又は請求項2の砂糖きび管理作業機。
【図1】


【図2】
【図2−1】
【図3】
【図4】
【図5】
【図5−1】
【図6】
【図7】
【図8】
【図9】
【図9−1】
【図10】
【図11】
【図12】
【図2】
【図2−1】
【図3】
【図4】
【図5】
【図5−1】
【図6】
【図7】
【図8】
【図9】
【図9−1】
【図10】
【図11】
【図12】
【公開番号】特開2011−45304(P2011−45304A)
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願番号】特願2009−197220(P2009−197220)
【出願日】平成21年8月27日(2009.8.27)
【出願人】(000239725)文明農機株式会社 (19)
【Fターム(参考)】
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願日】平成21年8月27日(2009.8.27)
【出願人】(000239725)文明農機株式会社 (19)
【Fターム(参考)】
[ Back to top ]