
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。

【発明の詳細な説明】
【技術分野】
【0001】
本願は、研磨された原石における3Dモデルの生成およびインクルージョンの検出に関する。特に、本発明は、これに限られるものではないが、ダイヤモンド原石におけるインクルージョンの検出に関する。
【背景技術】
【0002】
研磨ダイヤモンドの市場価値は、その色、カット特性、内部透明度、および重量(カラット)に依存し、これらは、「4C」として知られている。研磨ダイヤモンドの色、カット、および重量の決定は、比較的単純であるが、透明度については、通常、客観的に定めることが難しい。ダイヤモンドの透明度は、ダイヤモンドの内部のインクルージョンのサイズ、数、および分布によって定められる。一般に、「インクルージョン」と言う用語は、本願およびダイヤモンド産業の分野において、広い意味で使用され、これは、クラックおよび他のマクロ欠陥を含み、さらには所与の倍率、例えば10倍で視認できる非ダイヤモンド材料または他のダイヤモンド結晶のインクルージョンを含む。
【0003】
現在の方法では、材料の内部透明度は、外観からは正確に評価することは難しい場合がある。これは、ダイヤモンドを観察する機器が、ダイヤモンドの形状(カット)によって生じる光の屈折および散乱の影響を受けるためである。
【0004】
ダイヤモンドの外部形状を定めるための技術は、古くから構築されている。そのような技術には、通常、多くの異なる方向から得られるダイヤモンドの一連の画像または輪郭(silhouette)を作製することが含まれる。その後、画像が組み合わされ、表面の3次元マップが形成される。そのような技術の例は、米国特許第4529305号、米国特許第5544254号、および米国特許第6567156号に記載されている。しかしながら、これらの文献では、ダイヤモンドの内部透明度を決定するための情報が得られない。
【0005】
原理上、屈折率整合技術によって、これらのいくつかの制約は克服され得る。この技術では、被検査対象は、検査材料と同様の屈折率の液体を含むセル内に浸漬される。しかしながら、ダイヤモンドの場合、その高い屈折率(n=2.42)に整合する適当な液体が存在しない。また、これは、複雑で、作業者にとって骨の折れるプロセスであり、利用可能なそのような液体は、毒性がある。
【0006】
X線ミクロ断層撮影法では、ダイヤモンドの外部形状と内部特性の両方に関する情報が提供され得る。これらの波長でのダイヤモンドの屈折率は、極めて1に近く、これにより、内部微細構造の調査が容易となる。この一例は、SkyScan(www.skyscan.be/next/appication0601.htm)によって記載されている。しかしながら、この技術は、多くの用途において、実践するには極めて遅い。
【0007】
国際公開第02/46725号には、ダイヤモンドのインクルージョンの位置を検出する、別の方法および機器が記載されている。各インクルージョンは、最初にオペレータにより同定される必要がある。次に、ダイヤモンドが移動、回転され、多くの異なる方向から、インクルージョンが視認される。移動および回転が実施される各時間において、オペレータは、インクルージョンを再度同定する必要がある。そのため、この技術もあまり迅速ではなく、自動化が困難である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4529305号明細書
【特許文献2】国際公開第02/46725号
【発明の概要】
【発明が解決しようとする課題】
【0009】
また、一般に前述の技術は、粗(未研磨)ストーンにおけるインクルージョンの検出に利用される。研磨ストーン内の光の挙動は、より複雑であり、正確なモデル化が難しい。そのようなストーンのファセットでは、多くの内部反射が存在するからである。
【0010】
研磨原石においてインクルージョンを同定し、それらを自動で(すなわちオペレータによる同定を行わずに)位置付けることができる技術を提供することが要望されている。また、原石の3Dモデルを形成するための改良された技術を提供することが要望されている。
【課題を解決するための手段】
【0011】
本発明のある態様では、原石の3Dモデルを得る方法が提供される。この方法は、一連の個別の増分で、原石を回転するステップを有する。原石の各回転位置において、原石に平行光が照射され、輪郭画像が記録される。また、各回転位置において、原石には(さらなる回転の前に)、拡散光が照射され、拡散画像が記録される。輪郭画像と拡散画像を組み合わせた情報を利用することにより、原石の表面の3Dモデルが取得される。
【0012】
初期の3Dモデルは、輪郭画像の解析により得ることができる。次に、この初期のモデルは、拡散画像に含まれる情報を用いて改良(refine)される。この改良は、拡散画像における端部に、モデルのファセット端部を整列させるステップを含む。これは、初期のモデル端部に対して垂直な方向において、各拡散画像における領域をサンプリングするステップと、その領域の中心バーにおいて、最大勾配の位置を検出するステップとを有する。
【0013】
本方法は、インクルージョンの同定に利用するように、拡張しても良い。拡散画像において、特徴物が同定され、後続の拡散画像同士の間で、これが追跡(トラック)される。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。次に、配置された特徴物のいくつかまたは全部が、インクルージョンとして同定される。実際、この方法では、拡散画像に含まれる情報を用いて改良を行わない場合でも、初期の3Dモデル(輪郭画像から取得される)のみを使用することができる。
【0014】
輪郭画像および拡散画像は、ダイヤモンドの同じ回転位置において取得されるため(同じ結像手段によって観察されることが好ましい)、3Dモデルは、特徴物のトラッキングに使用される拡散画像に極めて好適に整合する。
【0015】
原石は、原石のテーブルファセットに略垂直な軸の周りを回転する。画像は、1または2以上のカメラによって記録されても良い。ある実施例では、原石の回転軸に対して異なる配置で、2台のカメラが使用される。
【0016】
輪郭画像は、略原石のガードルに向かって配向されたガードルカメラによって記録されても良い。拡散画像は、略原石のパビリオンに向かって配向されたガードルカメラ、およびパビリオンカメラによって記録されても良い。
【0017】
正投影図が提供される結像システムが有意である。すなわち結像システムは、物体空間にテレセントリックであっても良い。この場合、視点が無限大となる効果が得られる。
【0018】
本発明の別の態様では、原石の表面の3Dモデルを取得する方法が提供される。この方法は、原石の一連の増分回転位置において得られた平行光が照射された、原石の一組の輪郭画像を解析するステップを有する。輪郭画像の一部は、「キーフレーム」と称される。キーフレームは、原石のファセット面がカメラの軸と略平行になる際の輪郭画像であり、前記ファセットは、輪郭画像においてファセットラインとして認められるようになる。各キーフレームにおいて、ファセットラインに対する法線が計算される。ファセットラインに対する法線は、画像の面内にあり、3Dモデルにおけるファセットの法線に対応する。
【0019】
各輪郭画像に対して、原石の輪郭に対応する画素を境界化するため、凸包を同定しても良い。各凸包において、ファセット界面位置は、原石のファセット同士の間の界面と対応するように同定される。各ファセット界面位置での角度における後続の画像間において、変化がモニターされる。ファセット界面位置での角度が、最大または最少の場合、画像は、キーフレームとしてラベル化されても良い。キーフレームの凸包における最大または最少ファセット界面点の各側のラインは、画像のファセットラインに対応する。
【0020】
ファセット法線は、最初、原石のクラウンファセットおよびパビリオンファセットに対して定められる。原石のテーブルファセットに対する法線は、原石の回転軸を定めることにより計算される。その後、他のファセットが定められても良い。
【0021】
原石の一連の回転増分位置において得られた、拡散光が照射された原石の拡散画像を解析することにより、3Dモデルが改良される。
【0022】
3Dモデルを取得する方法は、前述のインクルージョンの決定に用いられても良い。
【0023】
本発明の別の態様では、原石のインクルージョンを同定する方法が提供される。原石の表面の3Dモデルが生成される。原石の一連の増分回転位置において取得された、拡散光が照射された原石の一連の拡散画像が解析される。画像内の候補特徴物が同定され、隣接する画像の間で、これがトラッキングされる。各トラック化特徴物に対して、3Dモデルに対する、想定される自由空間位置および屈折位置が評価される。自由空間位置の計算では、特徴物は、原石のニア表面上にあると仮定され、画像を取得するカメラからの光線は、原石を通過しない。屈折位置の計算では、特徴物は、ダイヤモンドの内部または背面にあると仮定され、カメラからの光線は、原石を通過する。原石による光線の反射および屈折を考慮して、計算が行われる。偽特徴物がフィルター除去され、特徴物の屈折位置に対応するインクルージョンが同定される。自由空間位置を用いて、候補特徴物が原石の前表面上または前表面の外側にあるかどうかの判断(従って、偽像の判断)が行われる。
【0024】
各トラック化特徴物は、閉塞特徴物、表面特徴物、屈折特徴物、またはエラー特徴物に分類され、屈折特徴物のみが、インクルージョンの同定に使用される。他のまたは追加の分類を使用しても良い。
【0025】
内部画像によって生じた偽特徴物は、以下のように同定される。ある画像において、概念上、原石の3Dモデルを介して、カメラから放射され、フロントファセットを介して屈折される光線の方向に、フロントファセットが配向される。モデルを介して概念上配向された、フロントファセットによって衝突する、3Dモデルのバックファセットのセグメントが、ポリゴンクリッピングアルゴリズムを用いて同定される。フロントファセットにおいて、これらのセグメント、およびこれらの間の境界が同定される。次に、フロントファセットにおいて認められるセグメントおよび境界は、偽特徴物として分類される。
【0026】
次に、セグメントは、概念上、バックファセットを反射し、原石のモデルを介して、反射光線の方向に沿って配向される。衝突する別のファセット、およびフロントファセットにおいて視認できるこれらのファセットのセグメントは、ポリゴンクリッピングアルゴリズム用いて同定される。次に、このプロセスは、予め定められた反射の最大数まで繰り返され、セグメントおよびこれらの間の境界の全体が、偽特徴物として同定される。
【0027】
次に、特徴物が相互にクラスター化され、欠陥が形成される。各欠陥に対して、3Dモデル内の境界体積が定められても良い。各境界体積は、視認できるフロントファセットの全てに、背面投影される。各拡散画像において、各欠陥の背面投射を形成する画素のグレーレベルが解析され、各欠陥の内容に関する統計指標が取得される。画素のグレーレベルは、原石のバックファセットの背面投射によって形成されたマップに対して、定められても良い。統計的指標から、インクルージョンのパラメータが決定される。
【0028】
前述の方法は、組み合わされても良い。これらのいずれかの方法は、さらに、インクルージョンのタイプ、形状、寸法、および/または密度を特定するステップと、特定されたインクルージョンのタイプ、形状、寸法、および/または密度に基づいて、原石に対して透明度値を与えるステップと、を有しても良い。
【0029】
原石は、研磨されたダイヤモンドであっても良い。
【0030】
また、本発明では、前述の方法を実施する機器、および示された解析を実行するコンピュータプログラムが提供される。
【0031】
本発明のさらなる態様では、原石の3Dモデルを生成する機器が提供される。この機器は、原石を取り付けるための取り付けステージを有し、取り付けステージは、一連の個別の増分で、回転可能である。各回転増分位置において原石の画像を記録するため、少なくとも一つのカメラが取り付けステージに向かって配向される。平行光でダイヤモンドを照射するため、平行光源が提供されるとともに、拡散光でダイヤモンドを照射するため、少なくとも一つの拡散光源が提供される。制御システムは、取り付けステージの回転、両光源の動作、および少なくとも一つのカメラの動作と協働し、原石の各回転位置において、以下のステップが実施される:
(a)平行光が照射された原石の輪郭画像がカメラで記録される;
(b)拡散光が照射された原石の拡散画像がカメラで記録される。輪郭画像および拡散画像を解析し、原石の表面の3Dモデルを取得するように、処理システムが配置される。処理システムは、さらに、輪郭画像から初期3Dモデルを生成するように配置され、このモデルは、拡散画像を用いて改良される。
【0032】
また、機器は、原石におけるインクルージョンの同定に使用されても良い。従って、処理システムは、さらに、拡散画像における特徴物を同定し、後続の拡散画像同士の間で、特徴物をトラッキングし、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して特徴物を配置し、配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定するように配置される。処理システムは、インクルージョンの同定の際に、(輪郭画像のみから生成された)初期3Dモデルを用いるように配置されても良い。
【0033】
機器は、さらに、取り付けステージを回転するステッパモータを有しても良い。2または3以上のカメラを、取り付けステージの回転軸に対して異なる配置で提供しても良い。カメラは、取り付けステージに取り付けられた原石のガードルに向かって配向されたガードルカメラであって、輪郭画像が記録されるガードルカメラと、取り付けステージに取り付けられた原石のパビリオンに向かって配向されたパビリオンカメラと、を有しても良い。
【0034】
従って、少なくとも好適実施例において、本発明の機器は、いくつかの注意深く制御された照射条件の下、高安定回転軸の周囲で研磨ダイヤモンドを回転させ、正確に定められた角度増分で、規則的に画像を撮影するように構成される。画像は、2つのカメラを用いて、ストーンの回転軸に対して異なる姿勢で撮影される。撮影された画像シーケンスは、処理され、ダイヤモンドの正確な立体モデルが得られ、必要な場合、ダイヤモンド内の欠陥がトラッキングされる。次に、トラックおよび立体モデルを相互に用いて、ストーンモデルの本体内に、3次元配置で欠陥が位置決めされる。さらに、特定の同定された欠陥を分類するため、これらの位置を用いて、ストーンの品質グレードに及ぼす影響および厳格性に関しての、画像のより厳密な評価が行われる。
【図面の簡単な説明】
【0035】
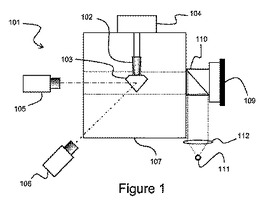
【図1】回転位置の範囲内でダイヤモンドに照射し、画像を得る機器の概略上面図である
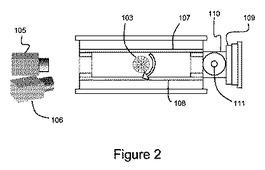
【図2】図1の機器の概略的な側面図である。
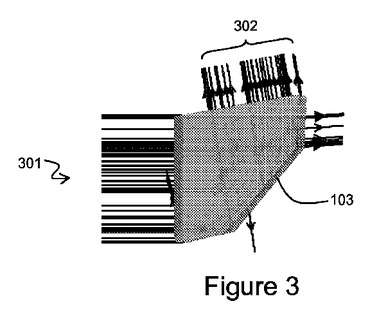
【図3】パビリオンを介して照射された際の、ブリリアントカット原石の光路を示した図である。
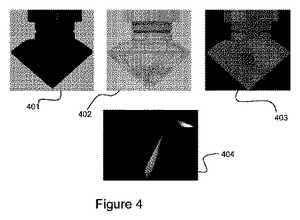
【図4】異なる方式で照射されたダイヤモンドの一連の写真である。
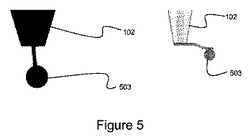
【図5】較正ターゲットを示した図である。
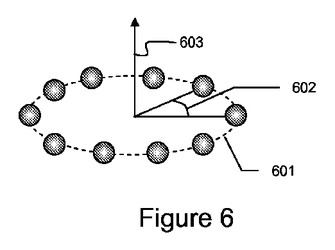
【図6】機械的な較正の原理を示した図である。
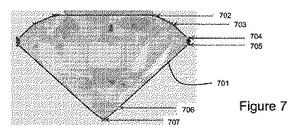
【図7】凸包を示したダイヤモンドの写真である。
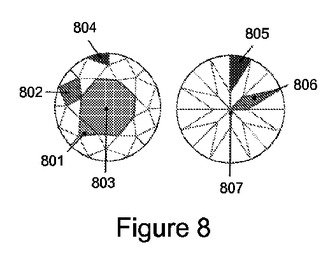
【図8】ブリリアントカットダイヤモンドの主要ファセットを示した図である。
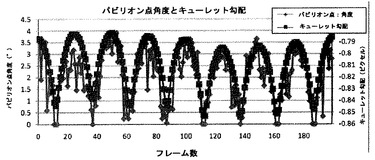
【図9】キューレット勾配およびパビリオン位置角度が回転位置によってどのように変化するかを示した図である。
【図10】拡散画像における端部を示した図である。
【図11】制御点と比較して測定点の補正を行うことを示した図である。
【図12】ダイヤモンドの写真における抽出されたコーナー特徴物、およびコーナー特徴物のトラックを示した図である。
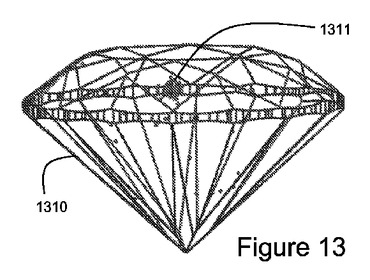
【図13】ダイヤモンドの3Dモデルにおけるトラック化特徴物の評価位置を示した図である。
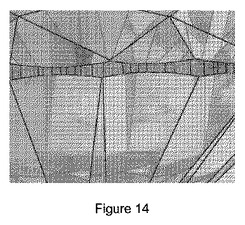
【図14】ダイヤモンドの背面投射ファセット端部を示した図である。
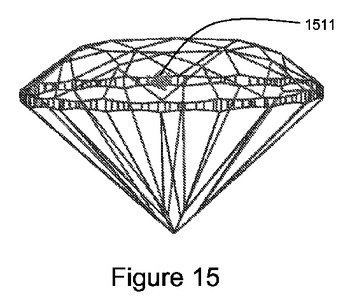
【図15】ダイヤモンドの3Dモデルにおけるクラスター化トラックを示した図である。
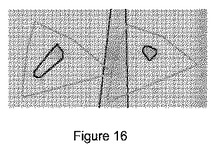
【図16】ダイヤモンドの画像における欠陥の境界体積の投影を示した図である。
【発明を実施するための形態】
【0036】
以下、一例としての添付図面を参照して、本発明のいくつかの好適実施例について説明する。
【0037】
図1および2には、それぞれ、ダイヤモンドのような研磨原石の透明度を定める機器101の上面図および側面図を示す。機器は、真空ノズル102を有し、この上には、ダイヤモンド103、または他の対象物が配置される。ダイヤモンド103は、ステッパモータ104を用いて、いかなる特定の角度にも正確に回転される。
【0038】
2つのカメラ105、106を用いて、各角度インターバルでダイヤモンド103の画像が撮影される。両カメラは、例えばシングル1/2”(8mm対角線)CCD、IEEE1394インターフェースデジタルカメラで、1280×960画素の解像度を有する。両カメラは、一方(「ガードルカメラ」105)がダイヤモンド103のガードル(すなわち「サイドオン」)に配向され、他方のカメラ(「パビリオンカメラ」106)が通常のカットダイヤモンドのパビリオンファセットと直接向き合うように配置される。ダイヤモンドが光に作用する態様により、カメラに到達する光線は、ストーンの体積の大部分を通過する。この視点は、カメラで記録される画像に存在し得る欠陥またはインクルージョンの最大の確率を提供する。これは、図3を参照することにより理解される。図3には、光301がダイヤモンド103を通過し、カメラの方に向かって反射する(302)態様が示されている。使用されるカメラ光学系は、テレセントリックであり、すなわちこれらは、開口数によって定められた角度の範囲内で、光学軸に平行に入射する光のみを集光する。カメラからの画像は、処理システムに転送され、記憶装置に保管される(図1には示されていない)。これらは、以降の画像の解析に使用される。
【0039】
ダイヤモンドは、拡散光、平行光、または両者によって照射される。拡散照射は、3つの平坦拡散光源107、108、109によって提供され、この場合、これはLEDパネルである。2つの大きなパネル107、108は、十分な間隔を開けて、相互に対向して配置され、両者の間に配置されたノズルに、ダイヤモンドが吊される。第3の小さなパネル109は、大きなパネルの2倍の強度を有する。これは、ビームスプリッタ110の後ろにあり、図1に示すように、このビームスプリッタを用いて、平行光または拡散光のいずれかが導入される。平行光は、別のLED111および関連の光学系112によって提供される。
【0040】
本機器は、4つの異なる照射方式を形成するように構成される。異なる光源の光学的および機械的配置により、他の条件に左右されずに、各照射条件を作り出すことができる。4つの照射タイプは、平行化、拡散性、半拡散性、および反射性であり、これらの4つの方式を使用したダイヤモンドの画像は、図4に示されている。平行照射(LED111および光学系112によって得られる)によって、ダイヤモンドは、完全に輪郭が視認され(画像401)、拡散照射(白色光の4πステラジアンに近づく)によって、ダイヤモンド内および表面の欠陥が可視化される(画像402)。半拡散照射では、ダイヤモンドは、後方および一側面から、または片側のみから照射され、これにより、ダイヤモンドのファセット構造が強調される(画像403)。第4の照射条件は、反射性照射であり、これによりフロントファセットが個々に強調される(画像404)。また、この条件は、ダイヤモンドのファセット構造を強調し、これは、ダイヤモンドモデルの改良用の半拡散照射の代わりに使用することができる。
【0041】
画像からの正確な測定を行うため、相互に対するカメラの位置、および対象(ダイヤモンド)の回転軸に対する位置を把握することは極めて重要である。また、ノズルの回転に使用されるいかなるモータも正確な角度精度を有さないため、各画像撮影の間の、軸の周囲の正確な回転角度を把握することも重要である。
【0042】
回転軸の特徴付けは、ダイヤモンドの代わりに、対象物をノズルに取り付けることにより行われる。取り付けは、回転軸から偏心して行われる。これは、図5に示されている。この例では、対象は、ボールベアリング503である。対象の輪郭画像は、何回かの完全な回転の下、2台のカメラを用いて取得される。これらは、回転軸の周囲で約90゜異なる、少なくとも2つの開始位置において、ボールを用いて繰り返される。
【0043】
ボールベアリングの中心位置は、輪郭画像から、極めて正確に定められる。ボールベアリングの中心によって得られる経路を観察することにより、カメラに対する回転軸が定められる。図6に示すように、画像間の測定中心の間隔を用いて、マップ化されたモータの角度増分がマップ化される。図6には、回転軸603の周囲の規則的角度増分602におけるボール503の軌跡601が示されている。
【0044】
一旦機器が機械的に較正されると、真空ノズルにダイヤモンドまたは他の原石が取り付けられ、測定が実施される。測定は、いくつかの段階を有する:
1 画像撮影シーケンス、
2 輪郭画像を用いた正確な形状測定およびストーンモデルの生成、反射性および/または拡散性/半拡散性画像を用いたさらなる改良、
3 欠陥の検出およびトラッキング、
4 ストーンを通る光路の背面投射、これによる内端部の位置の決定、
5 欠陥クラスタ化、
6 拡散画像における欠陥の境界領域の同定、およびこれらの領域内の欠陥の統計的指標の同定、
7 欠陥の分類によるストーンに対する厳格性評価、およびグレードの付与
以下、これらの段階について、より詳しく説明する。
【0045】
1. 画像シーケンス撮影
ダイヤモンドが取り付けられる真空ノズルは、ステッパモータによって、個別の増分で回転される。各増分での回転の後、両方のカメラにより、全ての照射条件の下で画像が撮影される。理想的には、ダイヤモンドは、単一の完全な回転のみを受ける。各回転位置において、順次異なる照射が行われ、複数の回転の間に生じる動きによって発生し得る、いかなるエラーも回避される。換言すれば、各増分の回転に従って、次の増分の回転が行われる前に、両カメラにより、全ての照射条件(輪郭、拡散、部分拡散、および反射)の下、必要な全ての画像が記録される。
【0046】
このプロセスの結果、全ての回転位置において、ダイヤモンドの完全な一組の画像が取得される。次に、これらの画像の解析が行われる。
【0047】
2. 形状測定
後のプロセスにおいて生じる内端部の光線トレースおよびモデル化のため、対象物の極めて正確なモデルが必要となる。これは、ガードルカメラ(すなわち、ダイヤモンドが平行光のみのよって照射された際の取得画像)によって得られた輪郭画像の解析により取得され、これは、一連のフレームとして検討される。この解析は、ダイヤモンドのファセットからの法線ベクトルの決定から始まる。測定された法線は、アルゴリズムに入力され、これに一致する最小の3D凸状形状が出力される。
【0048】
(凸包の検出)
ファセット法線ベクトルを検出するための最初のステップは、各ガードル輪郭フレームに対して、ダイヤモンドの輪郭の周囲の凸包を定めることである(凸包は、凸状ポリゴンであり、この頂点は、入力組におけるいくつかの点である)。凸包は、フレームにおける左側の最大輪郭点を取り、次に、凸包上の次の点が、最大角度を形成する輪郭点となるように動かされことにより同定される。図7には、この方法により定められた凸包701を示す。凸包は、一連の点を含み(テーブル点702、クラウン点703、上側ガードル点704、下側ガードル点705、パビリオン点706、およびキューレット点707)、これらは、ファセットの間の界面を形成する。
【0049】
(ファセット法線の測定)
ファセット法線は、最初に、主要ファセットに対して取得される。次に、必要に応じて、余剰なファセットが追加される。図8には、典型的なダイヤモンドの上部および下部に認められる主要ファセットを示す。スターファセット801、カイトファセット802、テーブルファセット803、上側ガードルファセット804、下側ガードルファセット805、パビリオン主要ファセット806、およびキューレット807がある。一旦主要ファセットの法線が得られると、凸状対象物形成アルゴリズムは、ダイヤモンドの形状の初期決定を行う上で、十分な情報を取得する。これは、その後、改良される。
【0050】
主要クラウンファセット(図8におけるスターおよびカイトファセット801、802)およびパビリオンファセット(図8におけるパビリオン主要ファセット803)のファセット法線は、「キーフレーム」における輪郭画像の測定により、見出される。ダイヤモンドが回転すると、ファセット間(図7に示すクラウン点703、パビリオン点706等)の凸包の見かけの角度が変化する。キーフレームは、パビリオンまたはクラウン点での凸包における角度の変化が最小(すなわち平坦)または最大となるフレームとして定義される。これらのキーフレームには、クラウンおよびパビリオンの2組が存在し、ストーンの2つの部分の不均衡が許容される。クラウンキーフレームは、凸包のクラウン点のいずれかの側の2つの直線端部により形成される角度を考慮することにより見出される。「最小クラウンキーフレーム」は、この角度が極小値となる箇所に見出される。同様に、「最大クラウンキーフレーム」は、ピーク角度を決定することにより見出される。キーフレームは、これらのピークに最近接なフレームである。カイトファセットおよびスターファセットに対する法線は、キーフレームにおける、測定されたカイトファセットおよびスターファセットの、凸包に対して垂直な直線である。
【0051】
同様の方法は、パビリオンキーフレームの検出にも使用される。ただし、パビリオン点の一方の側の角度の測定は、ノイズが極めて多く、良好な信頼性で補間することはできないため、代わりに、キューレット点でのパビリオンファセット同士の間の角度が使用される。図9には、フレーム同士の間のパビリオン点およびキューレット点の挙動を示す。
【0052】
ダイヤモンドのガードルは、必ずしもファセット化されていないが、これは、生成モデルにおける一連のファセットとして近似される。これらのファセットの法線は、2つのガードル点間の最も垂直な区画に対する法線を測定することにより検出される。
【0053】
上側および下側ガードルファセットは、いかなるキーフレームにおいても垂直方向には視認されない。その代わり、これらのフレームにおいて、これらの端部の一つが視認される。従って、点に基づく方法では、これらのファセットが使用される。最小クラウンキーフレームの凸包における上側ガードル点とクラウン点の間の観測端部の測定を用いて、2点が定められる。隣接する最大クラウンキーフレームにおける上側ガードル凸包点の測定を用いて、上側ガードルファセットプランにおける第3の点が定められ、これらの3つの測定から、ファセット法線が決定される。同様の方法を用いて、最小および最大パビリオンキーフレームから、下側ガードルファセットが決定される。
【0054】
テーブルファセット法線は、これが、ダイヤモンドが吊り下げられたノズルの軸と同じ配向にあると仮定することにより決定される。
【0055】
一旦主要ファセット法線が測定されると、凸形状生成アルゴリズムを用いて、3Dモデルが生成される。次に、この生成モデルは、以下により詳しく説明するように、画像内で、モデルのファセット端部がダイヤモンド端部と最も整列するように改良される。しかしながら、ダイヤモンドが追加のファセット(非主要なファセット)を有する場合、余剰のファセットが存在する領域では、モデルのアウトラインは、まだ凸包に整合しない。
【0056】
生成モデル投影内の各画素は、関連する距離を有し、この距離は、近似的に、モデルのアウトラインからの画素の垂直距離である。画素までの凸包の垂直距離が閾値距離よりも大きくなると、余剰のファセットが計算され、これがモデルに組み込まれる。
【0057】
(モデルの改良)
モデルの生成には、キーフレームのみが使用されるため、ファセット法線は、ある程度の誤差を含む。これらの誤差は、ファセット端部が拡散または部分拡散画像(ダイヤモンドが拡散光で照射された際に得られる画像)における端部と整列するように、モデルを改良することにより低減される。モデル改良アルゴリズムは、モデル端部が、対応する反射、拡散、または半拡散画像における端部に整列するように、ファセット法線を調節する。
【0058】
測定は、各フレーム内のダイヤモンドの前面にある各端部に沿った制御点において実施される。各制御点に対して、モデル端部に対して垂直な方向において、画素の領域をサンプリングし、中心バーの最大傾斜位置を検出することにより、画像の測定位置が検出される。
【0059】
拡散画像における測定端部は、反射画像よりも複雑である。これは、拡散画像は、ダイヤモンドを介して反射および屈折する、前面端部および端部セグメントの両方を含むためである。従って、特定の制御点の測定が、誤った端部により行われ得る。この場合、改良が最小限に抑制される。この問題のため、いくつかの方法が使用される:
・モデルおよび測定端部の配向が考慮される。もし配向が大きく異なる場合、測定が拒否される。
・第2の端部が存在し、このコントラストが最大強度の端部の特定の割合よりも大きい場合、およびこの端部から特定の画素距離内にある場合、測定が拒否される。
・モデル端部からの閾値距離よりも大きないかなる測定も、最小化から除去される。この除去に使用される閾値は、各繰り返し毎に減少し、モデル端部が測定値に近づくにつれて、制約が厳しくなる。
【0060】
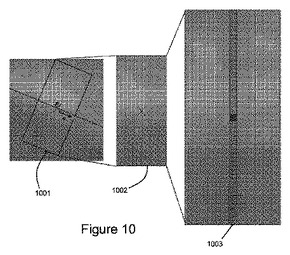
画像上のモデル化点p、およびモデル化端部方向eを与えたとき、以下のアルゴリズム(図10に示されている)を用いて、拡散または部分拡散画像における端部の対応する測定mが見出される:
1.eに対して垂直な方向におけるpからの1/2画素インターバルで、±y画素のバー1001をサンプリングする。e方向における1/2画素インターバルにおいて、±x画素で、そのようなサンプルを採取する。これにより、4y+1のサンプル1002の配列4x+1バーが得られる(図10に示されている)。モデル化端部が測定端部と平行な場合、測定端部は、このバー配列において水平である。
2.バー配列の水平方向での平坦化(すなわち端部に平行)
3.各バー1003に対して、
A 各サンプルでのバー勾配量の検出
B 最大および2番目に大きな勾配量の検出による、最大および2番目に大きなピークの検出
C 2番目に大きな勾配量が、最大勾配量の少なくとも75%である場合、および最大の閾値数画素内にある場合、次に、第2の候補端部が記録される
4.管の前面を測定する場合、
A 全てのバーにわたるメジアンピーク位置となる中間ピーク位置の設定
5.モデル端部を測定する場合、
A ピーク位置に対する直線フィッティング。この直線の勾配が、<0.1の場合、または勾配が>0.1の場合(すなわち、水平からの角度が〜5.7゜よりも大きい場合)、次に測定が拒絶される
B 第2の候補端部が記録された場合、次に、測定が拒絶される
C その他の場合、中間バーにおいて最大ピークとなる中間ピーク位置が設定される
6.中間ピークの周囲のサンプルの直線内挿による、端部位置のサブサンプル位置の取得。
【0061】
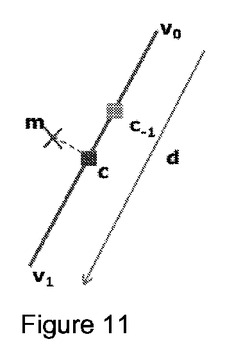
測定画素位置および投射モデル端部を提供することにより、端部に存在する制御点の検出が有効となり、測定は、この制御点から端部に対して垂直に伸びるようになる(図11参照)。
【0062】
端部の、V0’およびV1’の2頂点を考える。これらは、カメラ座標に変換され、画像に投射され、画素位置v0およびv1が与えられる。
【0063】
投射端部の方向dは、
【0064】
【数1】
である。画素測定mが端部からどの程度離れているかを定めることができる。線
【0065】
【数2】
に沿ったこの割合は、λであり、これは、
【0066】
【数3】
で計算される。
【0067】
次に、新たな制御点の画素位置cは、
【0068】
【数4】
となる。従って、新たな制御点のモデル座標Cを、以下のように求めることが可能となる:
【0069】
【数5】
ここで、c-1は、前の制御点画素位置である。
【0070】
3. 欠陥検出、トラッキング、および3Dプロット
欠陥のトラッキングは、ガードルカメラおよびパビリオンカメラの両方によって得られた拡散画像の解析により行われる。2つのカメラの相互に対する位置は、既知であるため、両カメラによって取得された画像を、事前に取得された3Dモデルに直接関連付けることが可能となる。
【0071】
拡散画像を使用し、ハリスコーナー検出器(C. Harris and M. J. Stephens, “A combined corner and edge detector”, Alvey Vision Conference, pages 147-152, 1988に 記載)を用いて、画像内の欠陥である可能性のある候補特徴物が同定される。次に、2Dトラッキングアルゴリズムを用いて、画像シーケンスの隣接フレームにおいて、整合するコーナー部の検出が試みられる。これは、その後、「トラック」に成長する。一旦多くのフレームに特徴物がトラック化されると、次に、カメラおよびモデル形状を用いて、ダイヤモンド体積内での特徴物の3D位置を予測することが可能となる。2つの3D位置が予測される。一つは、特徴物がダイヤモンドのニア表面にあると仮定され、これは、自由空間(自由空間位置)を介してのみ視認される。他方では、特徴物は、ダイヤモンドを介して視認されると仮定される(屈折位置)。屈折位置を予測するため、カメラから観測物までの光線は、これらがダイヤモンドを介して屈折し、反射しているものとして処理される。
【0072】
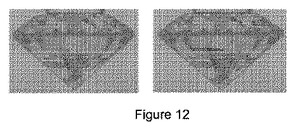
図12には、ダイヤモンドの2枚の写真を示す。図12には、抽出されたコーナーの特徴物と、コーナーの特徴物のトラックが示されている。図13には、ダイヤモンド1310の3Dモデルを示す。図には、モデル内のトラック化特徴物1311の予測位置が示されている。
【0073】
トラック化されるのは、欠陥の特徴物に限られない、しばしば、2つの面の相互に対するスライドによって生じるような、他の偽特徴物が存在する。これらの特徴物は、クラスター化を進める前に、分類しフィルタ除去する必要がある。これは、内端部の位置を定めることにより、容易化される(次の章において説明する)。
【0074】
トラックは、4つの可能性のあるタイプに分類される:
・閉鎖トラック−別のものの前でスライドした一つの表面によって形成される
・表面トラック(ダイヤモンドの前表面)
・屈折トラック(ダイヤモンド内で反射されるものを含む)
・非許容トラック(すなわち、エラー)
カメラに近い側のダイヤモンドの表面または表面近傍の特徴物は、ダイヤモンドを介して視認される特徴物と区別する必要がある。これは、表面特徴物の実際の位置は、自由空間位置であるためである。一方、特徴物がダイヤモンドを介して視認される場合、その実際の位置は、その屈折位置である。表面特徴物が、丁度ニア表面の前の位置を有する場合、その屈折位置は、ダイヤモンド表面から遠く離れている。
【0075】
以下の全ての指標を満たす場合、特徴物は、表面特徴物として分類される:
・閉鎖特徴物ではない
・閾値よりも長い
・その自由空間RMSエラーは、閾値未満である
・ニア表面の前にあるか、ニア表面に極めて接近している。
【0076】
ほとんどのトラック化特徴物は、ダイヤモンドを介して視認され、屈折特徴物として分類する必要がある。屈折特徴物は、以下の全ての指標を満たす:
・これらは、閉鎖特徴物または表面特徴物として、まだ分類されていない
・ある閾値よりも長い
・第2の閾値よりも小さな屈折RMSエラーを有する。
【0077】
最後に、残りの全てのトラック化特徴物(すなわち、閉鎖、表面、または屈折特徴物として分類できない特徴物)は、誤差であり、許容できないと言える。
【0078】
4. 内端部の位置の決定
輪郭解析により決定されたダイヤモンドモデルは、図14に示すように、ファセット端部の光線トレースに使用される。これらの端部は、後続のプロセスに使用され、観測欠陥が、ダイヤモンドファセットによって生成された散乱の偽像であるかどうかが判断される。この判断は、クラスタ化が実施された後に行われる。
【0079】
特定のフレームでは、各フロントファセットは、概念上、ダイヤモンドを介して、カメラからの光線の方向に向けられ、その後、光線は、フロントファセットを介して屈折される。このファセットは、多くのバックファセットに当たる。フロントファセットを介して視認されるこれらのバックファセットのセグメントは、ポリゴンクリッピングアルゴリズムを用いて決定される。
【0080】
次に、これらのファセットセグメントは、関連するバックファセットで反射し、ダイヤモンドを介して、反射光線の方向に向けられる。次に、衝突するファセット、およびこれらの可視ファセットのセグメントが、再度、ポリゴンクリッピング(Weiler Atherton)アルゴリズムを用いて定められる。このプロセスは、予め定められた最大数の反射まで継続される。
【0081】
その結果、フレームのフロントファセットを介して、一組のポリゴンが視認される。図14には、一例が示されている。これらのポリゴンは、欠陥解析のプロセスに使用され、特定の領域において、バックグラウンドのグレーレベルが決定される。
【0082】
5. 欠陥のクラスタ化
欠陥は、多くの形状およびサイズを取り得る。従って、コーナー検出器は、単一の大きな欠陥に、多くのトラッキング可能な特徴物を検出することができる。その結果、大きな欠陥によって、大群のトラック化特徴物が形成される(図13参照)。図15に示すように、欠陥当たり単一の存在物1511を生成するため、これらの大群の特徴物を関連付けることは有益である。次に、これらのクラスタ、およびそれに含まれる特徴物は、解析され、欠陥の特徴(寸法、形状、および密度)が算定される。
【0083】
異なる指標に基づき、3つのクラスタ化技術が開発されている。ユークリディアン(Euclidian)、マハラノビス(Mahalanobis)、およびグレーレベルである。ユークリディアンクラスタ化技術は、相互に閾値距離未満の距離だけ離れた、全てのトラックを関連付ける(デカルト空間)。マハラノビスクラスタ化技術は、マハラノビス距離が閾値よりも短いクラスタを合併する。グレーレベルクラスタ化技術では、同じフレームの同じファセットを介して観察される観測組を探し、2つのトラックが同じ欠陥上にあると判断した場合、対応するクラスタを合併する。この決定は、画像の画素が2つの観察の間、暗いままであるかどうかに基づき行われる。
【0084】
6. 拡散画像の再評価/欠陥解析
欠陥の内容を解析するため、拡散画像におけるグレーレベルが考慮される。欠陥の部分を含むフレームの領域を定めるため、観測された全てのフロントファセットに、欠陥クラスタの境界体積が背面投射される。次に、これらのフロントファセット内の画素のグレーレベルが検討され、欠陥の内容に関する統計的指標が取得される。
【0085】
(クラスタ境界体積の背面投射)
クラスタ内の各トラック化特徴物は、ファセットによりラベル化される。クラスタは、ファセットを介して視認され、ファセットを介して反射される。これは、トラックの経路である。クラスタからのトラック経路の組み合わせを用いて、クラスタが観測されるファセットが定められる。
【0086】
図16に示すように、組み合わせ経路の各々またはクラスタ観察に対して、関連する画像フレームに、3Dトラック位置が投射され、それらの周囲に凸包が描かれる結果、これらのフレームに、クラスタの境界体積の投射が生じる。
【0087】
各フレームは、クラスタ観察のリスト、およびこれらの関連する投射境界体積を有する。クラスタ観察を有する各フレームに対して、クラスタが観測されるフロントファセットが検討され、これらのフロントファセット内で、画素に基づいた密度が定められる。
【0088】
(個々の欠陥画素密度の決定)
画素が暗くなる量は、欠陥が存在しない場合の画素の強度に関係する。この強度は、適当なパッチにおける局部的なメジアン画素グレーレベルを検出することにより、近似される。画素のバックグラウンドのこの局部的な評価は、画素グレーレベルから差し引かれ、バックグラウンド予測によって得られた結果から、画素の密度値の近似が得られる。
【0089】
バックグラウンドの一定強度領域は、前述のような内端部の背面投射によって定められる。このプロセスのアウトプットは、フレームにおいて、フロントファセットを介して視認される一組のポリゴンである。背面投射ポリゴンは、ポリゴンラベル画像に描かれ、画素が位置するポリゴンを、直接参照することができる。
【0090】
次に、フロントファセットの投射体積内の画素のグレーレベルが検討され、欠陥の内容についての統計的指標が取得される。
【0091】
(投射境界体積の改良)
所与のクラスタの境界体積は、フレーム内の視認できる欠陥の部分よりも有意に小さい(または有意に大きい)。これは、トラック観測の不正確性と、欠陥のある部分のみがトラック化されることによるものである。一旦、ファセット内の各画素に対する画素密度の予測が計算されると、画像とより良く整合するように、この境界領域の形状を改良することが可能となる。
【0092】
密度が調整可能な閾値よりも低く、投射境界体積に含まれる画素は、高知能フラッド充填アルゴリズムを用いてフラッド充填される。アルゴリズムは、内端部および投射境界体積によって、誘導される。フラッド充填領域は、クラスタ観測よりも短い経路を有するファセット端部によって、縮小される必要がある。従って、ファセットポリゴンがクラスタ観察と同じ経路を有する場合、画素は、フラッド充填される。
【0093】
凸包は、クラスタ観察用の全てのフラッド充填領域に描かれ、改良された境界領域が得られる。この領域内の画素を使用して、欠陥の統計的証拠が蓄積される。
【0094】
(境界領域内の画素を用いた欠陥解析)
クラスタ観察境界領域内の画素は、欠陥のいくつかの統計を生成するため、検討され解析される。これらの統計には、以下が含まれる:
・欠陥の平均画素サイズ
・欠陥の平均密度
・単一の緻密な塊か、いくつかの小さな密度「小塊」かに関する、欠陥の形状。
【0095】
画素密度値のメジアン頻度ヒストグラムが計算される。加重数の画素密度を含む各容器(bin)の代わりに、このヒストグラムは、メジアン加重数の画素密度を含む。メジアンを用いることにより、偽クラスタ境界領域がフィルタ除去される。
【0096】
(ヒストグラムの解析)
一旦ヒストグラムが蓄積されると、以下の表に示された統計値が取得される。これらの統計を用いて、別の指標が求められる。例えば、欠陥内の緻密な材料の全量は、メジアン密度をメジアンサイズと掛け合わせることにより、検出される。欠陥が小塊である度合いは、暗さと隙間性(gappiness)の指標を比較することにより判断される。
【0097】
【表1】
追加のまたは他の指標を使用しても良い。
【0098】
7. 欠陥分類
次に、ダイヤモンド内の欠陥配置とともに、得られた統計的指標を用いることにより、検出欠陥の重要度を測定し、これらをストーンの品質グレードに関連付ける分類を形成することが可能となる。
【0099】
前述の実施例の変形は、依然として本発明の範囲に含まれることは明らかである。例えば、ダイヤモンドの測定および解析について説明したが、システムを使用して、他の原石の透明度を定めても良いことは明らかである。
【0100】
また、前述のシステムは、画像撮影のため、規則的な角度インターバルで、ダイヤモンドの回転を停止するステップを有する。別の方法では、ストーンは、既知の角速度で回転され、パルス照射され、カメラは、等しい角度間隔で画像が撮影されるように、規則的なインターバルで作動されても良い。照射は、パルス的に逐次的に行われ(平行、拡散、半拡散、等)、ストーンの単一の回転のみが要求されても良い。その他の方式も、当業者には明らかである。
【技術分野】
【0001】
本願は、研磨された原石における3Dモデルの生成およびインクルージョンの検出に関する。特に、本発明は、これに限られるものではないが、ダイヤモンド原石におけるインクルージョンの検出に関する。
【背景技術】
【0002】
研磨ダイヤモンドの市場価値は、その色、カット特性、内部透明度、および重量(カラット)に依存し、これらは、「4C」として知られている。研磨ダイヤモンドの色、カット、および重量の決定は、比較的単純であるが、透明度については、通常、客観的に定めることが難しい。ダイヤモンドの透明度は、ダイヤモンドの内部のインクルージョンのサイズ、数、および分布によって定められる。一般に、「インクルージョン」と言う用語は、本願およびダイヤモンド産業の分野において、広い意味で使用され、これは、クラックおよび他のマクロ欠陥を含み、さらには所与の倍率、例えば10倍で視認できる非ダイヤモンド材料または他のダイヤモンド結晶のインクルージョンを含む。
【0003】
現在の方法では、材料の内部透明度は、外観からは正確に評価することは難しい場合がある。これは、ダイヤモンドを観察する機器が、ダイヤモンドの形状(カット)によって生じる光の屈折および散乱の影響を受けるためである。
【0004】
ダイヤモンドの外部形状を定めるための技術は、古くから構築されている。そのような技術には、通常、多くの異なる方向から得られるダイヤモンドの一連の画像または輪郭(silhouette)を作製することが含まれる。その後、画像が組み合わされ、表面の3次元マップが形成される。そのような技術の例は、米国特許第4529305号、米国特許第5544254号、および米国特許第6567156号に記載されている。しかしながら、これらの文献では、ダイヤモンドの内部透明度を決定するための情報が得られない。
【0005】
原理上、屈折率整合技術によって、これらのいくつかの制約は克服され得る。この技術では、被検査対象は、検査材料と同様の屈折率の液体を含むセル内に浸漬される。しかしながら、ダイヤモンドの場合、その高い屈折率(n=2.42)に整合する適当な液体が存在しない。また、これは、複雑で、作業者にとって骨の折れるプロセスであり、利用可能なそのような液体は、毒性がある。
【0006】
X線ミクロ断層撮影法では、ダイヤモンドの外部形状と内部特性の両方に関する情報が提供され得る。これらの波長でのダイヤモンドの屈折率は、極めて1に近く、これにより、内部微細構造の調査が容易となる。この一例は、SkyScan(www.skyscan.be/next/appication0601.htm)によって記載されている。しかしながら、この技術は、多くの用途において、実践するには極めて遅い。
【0007】
国際公開第02/46725号には、ダイヤモンドのインクルージョンの位置を検出する、別の方法および機器が記載されている。各インクルージョンは、最初にオペレータにより同定される必要がある。次に、ダイヤモンドが移動、回転され、多くの異なる方向から、インクルージョンが視認される。移動および回転が実施される各時間において、オペレータは、インクルージョンを再度同定する必要がある。そのため、この技術もあまり迅速ではなく、自動化が困難である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4529305号明細書
【特許文献2】国際公開第02/46725号
【発明の概要】
【発明が解決しようとする課題】
【0009】
また、一般に前述の技術は、粗(未研磨)ストーンにおけるインクルージョンの検出に利用される。研磨ストーン内の光の挙動は、より複雑であり、正確なモデル化が難しい。そのようなストーンのファセットでは、多くの内部反射が存在するからである。
【0010】
研磨原石においてインクルージョンを同定し、それらを自動で(すなわちオペレータによる同定を行わずに)位置付けることができる技術を提供することが要望されている。また、原石の3Dモデルを形成するための改良された技術を提供することが要望されている。
【課題を解決するための手段】
【0011】
本発明のある態様では、原石の3Dモデルを得る方法が提供される。この方法は、一連の個別の増分で、原石を回転するステップを有する。原石の各回転位置において、原石に平行光が照射され、輪郭画像が記録される。また、各回転位置において、原石には(さらなる回転の前に)、拡散光が照射され、拡散画像が記録される。輪郭画像と拡散画像を組み合わせた情報を利用することにより、原石の表面の3Dモデルが取得される。
【0012】
初期の3Dモデルは、輪郭画像の解析により得ることができる。次に、この初期のモデルは、拡散画像に含まれる情報を用いて改良(refine)される。この改良は、拡散画像における端部に、モデルのファセット端部を整列させるステップを含む。これは、初期のモデル端部に対して垂直な方向において、各拡散画像における領域をサンプリングするステップと、その領域の中心バーにおいて、最大勾配の位置を検出するステップとを有する。
【0013】
本方法は、インクルージョンの同定に利用するように、拡張しても良い。拡散画像において、特徴物が同定され、後続の拡散画像同士の間で、これが追跡(トラック)される。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。次に、配置された特徴物のいくつかまたは全部が、インクルージョンとして同定される。実際、この方法では、拡散画像に含まれる情報を用いて改良を行わない場合でも、初期の3Dモデル(輪郭画像から取得される)のみを使用することができる。
【0014】
輪郭画像および拡散画像は、ダイヤモンドの同じ回転位置において取得されるため(同じ結像手段によって観察されることが好ましい)、3Dモデルは、特徴物のトラッキングに使用される拡散画像に極めて好適に整合する。
【0015】
原石は、原石のテーブルファセットに略垂直な軸の周りを回転する。画像は、1または2以上のカメラによって記録されても良い。ある実施例では、原石の回転軸に対して異なる配置で、2台のカメラが使用される。
【0016】
輪郭画像は、略原石のガードルに向かって配向されたガードルカメラによって記録されても良い。拡散画像は、略原石のパビリオンに向かって配向されたガードルカメラ、およびパビリオンカメラによって記録されても良い。
【0017】
正投影図が提供される結像システムが有意である。すなわち結像システムは、物体空間にテレセントリックであっても良い。この場合、視点が無限大となる効果が得られる。
【0018】
本発明の別の態様では、原石の表面の3Dモデルを取得する方法が提供される。この方法は、原石の一連の増分回転位置において得られた平行光が照射された、原石の一組の輪郭画像を解析するステップを有する。輪郭画像の一部は、「キーフレーム」と称される。キーフレームは、原石のファセット面がカメラの軸と略平行になる際の輪郭画像であり、前記ファセットは、輪郭画像においてファセットラインとして認められるようになる。各キーフレームにおいて、ファセットラインに対する法線が計算される。ファセットラインに対する法線は、画像の面内にあり、3Dモデルにおけるファセットの法線に対応する。
【0019】
各輪郭画像に対して、原石の輪郭に対応する画素を境界化するため、凸包を同定しても良い。各凸包において、ファセット界面位置は、原石のファセット同士の間の界面と対応するように同定される。各ファセット界面位置での角度における後続の画像間において、変化がモニターされる。ファセット界面位置での角度が、最大または最少の場合、画像は、キーフレームとしてラベル化されても良い。キーフレームの凸包における最大または最少ファセット界面点の各側のラインは、画像のファセットラインに対応する。
【0020】
ファセット法線は、最初、原石のクラウンファセットおよびパビリオンファセットに対して定められる。原石のテーブルファセットに対する法線は、原石の回転軸を定めることにより計算される。その後、他のファセットが定められても良い。
【0021】
原石の一連の回転増分位置において得られた、拡散光が照射された原石の拡散画像を解析することにより、3Dモデルが改良される。
【0022】
3Dモデルを取得する方法は、前述のインクルージョンの決定に用いられても良い。
【0023】
本発明の別の態様では、原石のインクルージョンを同定する方法が提供される。原石の表面の3Dモデルが生成される。原石の一連の増分回転位置において取得された、拡散光が照射された原石の一連の拡散画像が解析される。画像内の候補特徴物が同定され、隣接する画像の間で、これがトラッキングされる。各トラック化特徴物に対して、3Dモデルに対する、想定される自由空間位置および屈折位置が評価される。自由空間位置の計算では、特徴物は、原石のニア表面上にあると仮定され、画像を取得するカメラからの光線は、原石を通過しない。屈折位置の計算では、特徴物は、ダイヤモンドの内部または背面にあると仮定され、カメラからの光線は、原石を通過する。原石による光線の反射および屈折を考慮して、計算が行われる。偽特徴物がフィルター除去され、特徴物の屈折位置に対応するインクルージョンが同定される。自由空間位置を用いて、候補特徴物が原石の前表面上または前表面の外側にあるかどうかの判断(従って、偽像の判断)が行われる。
【0024】
各トラック化特徴物は、閉塞特徴物、表面特徴物、屈折特徴物、またはエラー特徴物に分類され、屈折特徴物のみが、インクルージョンの同定に使用される。他のまたは追加の分類を使用しても良い。
【0025】
内部画像によって生じた偽特徴物は、以下のように同定される。ある画像において、概念上、原石の3Dモデルを介して、カメラから放射され、フロントファセットを介して屈折される光線の方向に、フロントファセットが配向される。モデルを介して概念上配向された、フロントファセットによって衝突する、3Dモデルのバックファセットのセグメントが、ポリゴンクリッピングアルゴリズムを用いて同定される。フロントファセットにおいて、これらのセグメント、およびこれらの間の境界が同定される。次に、フロントファセットにおいて認められるセグメントおよび境界は、偽特徴物として分類される。
【0026】
次に、セグメントは、概念上、バックファセットを反射し、原石のモデルを介して、反射光線の方向に沿って配向される。衝突する別のファセット、およびフロントファセットにおいて視認できるこれらのファセットのセグメントは、ポリゴンクリッピングアルゴリズム用いて同定される。次に、このプロセスは、予め定められた反射の最大数まで繰り返され、セグメントおよびこれらの間の境界の全体が、偽特徴物として同定される。
【0027】
次に、特徴物が相互にクラスター化され、欠陥が形成される。各欠陥に対して、3Dモデル内の境界体積が定められても良い。各境界体積は、視認できるフロントファセットの全てに、背面投影される。各拡散画像において、各欠陥の背面投射を形成する画素のグレーレベルが解析され、各欠陥の内容に関する統計指標が取得される。画素のグレーレベルは、原石のバックファセットの背面投射によって形成されたマップに対して、定められても良い。統計的指標から、インクルージョンのパラメータが決定される。
【0028】
前述の方法は、組み合わされても良い。これらのいずれかの方法は、さらに、インクルージョンのタイプ、形状、寸法、および/または密度を特定するステップと、特定されたインクルージョンのタイプ、形状、寸法、および/または密度に基づいて、原石に対して透明度値を与えるステップと、を有しても良い。
【0029】
原石は、研磨されたダイヤモンドであっても良い。
【0030】
また、本発明では、前述の方法を実施する機器、および示された解析を実行するコンピュータプログラムが提供される。
【0031】
本発明のさらなる態様では、原石の3Dモデルを生成する機器が提供される。この機器は、原石を取り付けるための取り付けステージを有し、取り付けステージは、一連の個別の増分で、回転可能である。各回転増分位置において原石の画像を記録するため、少なくとも一つのカメラが取り付けステージに向かって配向される。平行光でダイヤモンドを照射するため、平行光源が提供されるとともに、拡散光でダイヤモンドを照射するため、少なくとも一つの拡散光源が提供される。制御システムは、取り付けステージの回転、両光源の動作、および少なくとも一つのカメラの動作と協働し、原石の各回転位置において、以下のステップが実施される:
(a)平行光が照射された原石の輪郭画像がカメラで記録される;
(b)拡散光が照射された原石の拡散画像がカメラで記録される。輪郭画像および拡散画像を解析し、原石の表面の3Dモデルを取得するように、処理システムが配置される。処理システムは、さらに、輪郭画像から初期3Dモデルを生成するように配置され、このモデルは、拡散画像を用いて改良される。
【0032】
また、機器は、原石におけるインクルージョンの同定に使用されても良い。従って、処理システムは、さらに、拡散画像における特徴物を同定し、後続の拡散画像同士の間で、特徴物をトラッキングし、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して特徴物を配置し、配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定するように配置される。処理システムは、インクルージョンの同定の際に、(輪郭画像のみから生成された)初期3Dモデルを用いるように配置されても良い。
【0033】
機器は、さらに、取り付けステージを回転するステッパモータを有しても良い。2または3以上のカメラを、取り付けステージの回転軸に対して異なる配置で提供しても良い。カメラは、取り付けステージに取り付けられた原石のガードルに向かって配向されたガードルカメラであって、輪郭画像が記録されるガードルカメラと、取り付けステージに取り付けられた原石のパビリオンに向かって配向されたパビリオンカメラと、を有しても良い。
【0034】
従って、少なくとも好適実施例において、本発明の機器は、いくつかの注意深く制御された照射条件の下、高安定回転軸の周囲で研磨ダイヤモンドを回転させ、正確に定められた角度増分で、規則的に画像を撮影するように構成される。画像は、2つのカメラを用いて、ストーンの回転軸に対して異なる姿勢で撮影される。撮影された画像シーケンスは、処理され、ダイヤモンドの正確な立体モデルが得られ、必要な場合、ダイヤモンド内の欠陥がトラッキングされる。次に、トラックおよび立体モデルを相互に用いて、ストーンモデルの本体内に、3次元配置で欠陥が位置決めされる。さらに、特定の同定された欠陥を分類するため、これらの位置を用いて、ストーンの品質グレードに及ぼす影響および厳格性に関しての、画像のより厳密な評価が行われる。
【図面の簡単な説明】
【0035】
【図1】回転位置の範囲内でダイヤモンドに照射し、画像を得る機器の概略上面図である
【図2】図1の機器の概略的な側面図である。
【図3】パビリオンを介して照射された際の、ブリリアントカット原石の光路を示した図である。
【図4】異なる方式で照射されたダイヤモンドの一連の写真である。
【図5】較正ターゲットを示した図である。
【図6】機械的な較正の原理を示した図である。
【図7】凸包を示したダイヤモンドの写真である。
【図8】ブリリアントカットダイヤモンドの主要ファセットを示した図である。
【図9】キューレット勾配およびパビリオン位置角度が回転位置によってどのように変化するかを示した図である。
【図10】拡散画像における端部を示した図である。
【図11】制御点と比較して測定点の補正を行うことを示した図である。
【図12】ダイヤモンドの写真における抽出されたコーナー特徴物、およびコーナー特徴物のトラックを示した図である。
【図13】ダイヤモンドの3Dモデルにおけるトラック化特徴物の評価位置を示した図である。
【図14】ダイヤモンドの背面投射ファセット端部を示した図である。
【図15】ダイヤモンドの3Dモデルにおけるクラスター化トラックを示した図である。
【図16】ダイヤモンドの画像における欠陥の境界体積の投影を示した図である。
【発明を実施するための形態】
【0036】
以下、一例としての添付図面を参照して、本発明のいくつかの好適実施例について説明する。
【0037】
図1および2には、それぞれ、ダイヤモンドのような研磨原石の透明度を定める機器101の上面図および側面図を示す。機器は、真空ノズル102を有し、この上には、ダイヤモンド103、または他の対象物が配置される。ダイヤモンド103は、ステッパモータ104を用いて、いかなる特定の角度にも正確に回転される。
【0038】
2つのカメラ105、106を用いて、各角度インターバルでダイヤモンド103の画像が撮影される。両カメラは、例えばシングル1/2”(8mm対角線)CCD、IEEE1394インターフェースデジタルカメラで、1280×960画素の解像度を有する。両カメラは、一方(「ガードルカメラ」105)がダイヤモンド103のガードル(すなわち「サイドオン」)に配向され、他方のカメラ(「パビリオンカメラ」106)が通常のカットダイヤモンドのパビリオンファセットと直接向き合うように配置される。ダイヤモンドが光に作用する態様により、カメラに到達する光線は、ストーンの体積の大部分を通過する。この視点は、カメラで記録される画像に存在し得る欠陥またはインクルージョンの最大の確率を提供する。これは、図3を参照することにより理解される。図3には、光301がダイヤモンド103を通過し、カメラの方に向かって反射する(302)態様が示されている。使用されるカメラ光学系は、テレセントリックであり、すなわちこれらは、開口数によって定められた角度の範囲内で、光学軸に平行に入射する光のみを集光する。カメラからの画像は、処理システムに転送され、記憶装置に保管される(図1には示されていない)。これらは、以降の画像の解析に使用される。
【0039】
ダイヤモンドは、拡散光、平行光、または両者によって照射される。拡散照射は、3つの平坦拡散光源107、108、109によって提供され、この場合、これはLEDパネルである。2つの大きなパネル107、108は、十分な間隔を開けて、相互に対向して配置され、両者の間に配置されたノズルに、ダイヤモンドが吊される。第3の小さなパネル109は、大きなパネルの2倍の強度を有する。これは、ビームスプリッタ110の後ろにあり、図1に示すように、このビームスプリッタを用いて、平行光または拡散光のいずれかが導入される。平行光は、別のLED111および関連の光学系112によって提供される。
【0040】
本機器は、4つの異なる照射方式を形成するように構成される。異なる光源の光学的および機械的配置により、他の条件に左右されずに、各照射条件を作り出すことができる。4つの照射タイプは、平行化、拡散性、半拡散性、および反射性であり、これらの4つの方式を使用したダイヤモンドの画像は、図4に示されている。平行照射(LED111および光学系112によって得られる)によって、ダイヤモンドは、完全に輪郭が視認され(画像401)、拡散照射(白色光の4πステラジアンに近づく)によって、ダイヤモンド内および表面の欠陥が可視化される(画像402)。半拡散照射では、ダイヤモンドは、後方および一側面から、または片側のみから照射され、これにより、ダイヤモンドのファセット構造が強調される(画像403)。第4の照射条件は、反射性照射であり、これによりフロントファセットが個々に強調される(画像404)。また、この条件は、ダイヤモンドのファセット構造を強調し、これは、ダイヤモンドモデルの改良用の半拡散照射の代わりに使用することができる。
【0041】
画像からの正確な測定を行うため、相互に対するカメラの位置、および対象(ダイヤモンド)の回転軸に対する位置を把握することは極めて重要である。また、ノズルの回転に使用されるいかなるモータも正確な角度精度を有さないため、各画像撮影の間の、軸の周囲の正確な回転角度を把握することも重要である。
【0042】
回転軸の特徴付けは、ダイヤモンドの代わりに、対象物をノズルに取り付けることにより行われる。取り付けは、回転軸から偏心して行われる。これは、図5に示されている。この例では、対象は、ボールベアリング503である。対象の輪郭画像は、何回かの完全な回転の下、2台のカメラを用いて取得される。これらは、回転軸の周囲で約90゜異なる、少なくとも2つの開始位置において、ボールを用いて繰り返される。
【0043】
ボールベアリングの中心位置は、輪郭画像から、極めて正確に定められる。ボールベアリングの中心によって得られる経路を観察することにより、カメラに対する回転軸が定められる。図6に示すように、画像間の測定中心の間隔を用いて、マップ化されたモータの角度増分がマップ化される。図6には、回転軸603の周囲の規則的角度増分602におけるボール503の軌跡601が示されている。
【0044】
一旦機器が機械的に較正されると、真空ノズルにダイヤモンドまたは他の原石が取り付けられ、測定が実施される。測定は、いくつかの段階を有する:
1 画像撮影シーケンス、
2 輪郭画像を用いた正確な形状測定およびストーンモデルの生成、反射性および/または拡散性/半拡散性画像を用いたさらなる改良、
3 欠陥の検出およびトラッキング、
4 ストーンを通る光路の背面投射、これによる内端部の位置の決定、
5 欠陥クラスタ化、
6 拡散画像における欠陥の境界領域の同定、およびこれらの領域内の欠陥の統計的指標の同定、
7 欠陥の分類によるストーンに対する厳格性評価、およびグレードの付与
以下、これらの段階について、より詳しく説明する。
【0045】
1. 画像シーケンス撮影
ダイヤモンドが取り付けられる真空ノズルは、ステッパモータによって、個別の増分で回転される。各増分での回転の後、両方のカメラにより、全ての照射条件の下で画像が撮影される。理想的には、ダイヤモンドは、単一の完全な回転のみを受ける。各回転位置において、順次異なる照射が行われ、複数の回転の間に生じる動きによって発生し得る、いかなるエラーも回避される。換言すれば、各増分の回転に従って、次の増分の回転が行われる前に、両カメラにより、全ての照射条件(輪郭、拡散、部分拡散、および反射)の下、必要な全ての画像が記録される。
【0046】
このプロセスの結果、全ての回転位置において、ダイヤモンドの完全な一組の画像が取得される。次に、これらの画像の解析が行われる。
【0047】
2. 形状測定
後のプロセスにおいて生じる内端部の光線トレースおよびモデル化のため、対象物の極めて正確なモデルが必要となる。これは、ガードルカメラ(すなわち、ダイヤモンドが平行光のみのよって照射された際の取得画像)によって得られた輪郭画像の解析により取得され、これは、一連のフレームとして検討される。この解析は、ダイヤモンドのファセットからの法線ベクトルの決定から始まる。測定された法線は、アルゴリズムに入力され、これに一致する最小の3D凸状形状が出力される。
【0048】
(凸包の検出)
ファセット法線ベクトルを検出するための最初のステップは、各ガードル輪郭フレームに対して、ダイヤモンドの輪郭の周囲の凸包を定めることである(凸包は、凸状ポリゴンであり、この頂点は、入力組におけるいくつかの点である)。凸包は、フレームにおける左側の最大輪郭点を取り、次に、凸包上の次の点が、最大角度を形成する輪郭点となるように動かされことにより同定される。図7には、この方法により定められた凸包701を示す。凸包は、一連の点を含み(テーブル点702、クラウン点703、上側ガードル点704、下側ガードル点705、パビリオン点706、およびキューレット点707)、これらは、ファセットの間の界面を形成する。
【0049】
(ファセット法線の測定)
ファセット法線は、最初に、主要ファセットに対して取得される。次に、必要に応じて、余剰なファセットが追加される。図8には、典型的なダイヤモンドの上部および下部に認められる主要ファセットを示す。スターファセット801、カイトファセット802、テーブルファセット803、上側ガードルファセット804、下側ガードルファセット805、パビリオン主要ファセット806、およびキューレット807がある。一旦主要ファセットの法線が得られると、凸状対象物形成アルゴリズムは、ダイヤモンドの形状の初期決定を行う上で、十分な情報を取得する。これは、その後、改良される。
【0050】
主要クラウンファセット(図8におけるスターおよびカイトファセット801、802)およびパビリオンファセット(図8におけるパビリオン主要ファセット803)のファセット法線は、「キーフレーム」における輪郭画像の測定により、見出される。ダイヤモンドが回転すると、ファセット間(図7に示すクラウン点703、パビリオン点706等)の凸包の見かけの角度が変化する。キーフレームは、パビリオンまたはクラウン点での凸包における角度の変化が最小(すなわち平坦)または最大となるフレームとして定義される。これらのキーフレームには、クラウンおよびパビリオンの2組が存在し、ストーンの2つの部分の不均衡が許容される。クラウンキーフレームは、凸包のクラウン点のいずれかの側の2つの直線端部により形成される角度を考慮することにより見出される。「最小クラウンキーフレーム」は、この角度が極小値となる箇所に見出される。同様に、「最大クラウンキーフレーム」は、ピーク角度を決定することにより見出される。キーフレームは、これらのピークに最近接なフレームである。カイトファセットおよびスターファセットに対する法線は、キーフレームにおける、測定されたカイトファセットおよびスターファセットの、凸包に対して垂直な直線である。
【0051】
同様の方法は、パビリオンキーフレームの検出にも使用される。ただし、パビリオン点の一方の側の角度の測定は、ノイズが極めて多く、良好な信頼性で補間することはできないため、代わりに、キューレット点でのパビリオンファセット同士の間の角度が使用される。図9には、フレーム同士の間のパビリオン点およびキューレット点の挙動を示す。
【0052】
ダイヤモンドのガードルは、必ずしもファセット化されていないが、これは、生成モデルにおける一連のファセットとして近似される。これらのファセットの法線は、2つのガードル点間の最も垂直な区画に対する法線を測定することにより検出される。
【0053】
上側および下側ガードルファセットは、いかなるキーフレームにおいても垂直方向には視認されない。その代わり、これらのフレームにおいて、これらの端部の一つが視認される。従って、点に基づく方法では、これらのファセットが使用される。最小クラウンキーフレームの凸包における上側ガードル点とクラウン点の間の観測端部の測定を用いて、2点が定められる。隣接する最大クラウンキーフレームにおける上側ガードル凸包点の測定を用いて、上側ガードルファセットプランにおける第3の点が定められ、これらの3つの測定から、ファセット法線が決定される。同様の方法を用いて、最小および最大パビリオンキーフレームから、下側ガードルファセットが決定される。
【0054】
テーブルファセット法線は、これが、ダイヤモンドが吊り下げられたノズルの軸と同じ配向にあると仮定することにより決定される。
【0055】
一旦主要ファセット法線が測定されると、凸形状生成アルゴリズムを用いて、3Dモデルが生成される。次に、この生成モデルは、以下により詳しく説明するように、画像内で、モデルのファセット端部がダイヤモンド端部と最も整列するように改良される。しかしながら、ダイヤモンドが追加のファセット(非主要なファセット)を有する場合、余剰のファセットが存在する領域では、モデルのアウトラインは、まだ凸包に整合しない。
【0056】
生成モデル投影内の各画素は、関連する距離を有し、この距離は、近似的に、モデルのアウトラインからの画素の垂直距離である。画素までの凸包の垂直距離が閾値距離よりも大きくなると、余剰のファセットが計算され、これがモデルに組み込まれる。
【0057】
(モデルの改良)
モデルの生成には、キーフレームのみが使用されるため、ファセット法線は、ある程度の誤差を含む。これらの誤差は、ファセット端部が拡散または部分拡散画像(ダイヤモンドが拡散光で照射された際に得られる画像)における端部と整列するように、モデルを改良することにより低減される。モデル改良アルゴリズムは、モデル端部が、対応する反射、拡散、または半拡散画像における端部に整列するように、ファセット法線を調節する。
【0058】
測定は、各フレーム内のダイヤモンドの前面にある各端部に沿った制御点において実施される。各制御点に対して、モデル端部に対して垂直な方向において、画素の領域をサンプリングし、中心バーの最大傾斜位置を検出することにより、画像の測定位置が検出される。
【0059】
拡散画像における測定端部は、反射画像よりも複雑である。これは、拡散画像は、ダイヤモンドを介して反射および屈折する、前面端部および端部セグメントの両方を含むためである。従って、特定の制御点の測定が、誤った端部により行われ得る。この場合、改良が最小限に抑制される。この問題のため、いくつかの方法が使用される:
・モデルおよび測定端部の配向が考慮される。もし配向が大きく異なる場合、測定が拒否される。
・第2の端部が存在し、このコントラストが最大強度の端部の特定の割合よりも大きい場合、およびこの端部から特定の画素距離内にある場合、測定が拒否される。
・モデル端部からの閾値距離よりも大きないかなる測定も、最小化から除去される。この除去に使用される閾値は、各繰り返し毎に減少し、モデル端部が測定値に近づくにつれて、制約が厳しくなる。
【0060】
画像上のモデル化点p、およびモデル化端部方向eを与えたとき、以下のアルゴリズム(図10に示されている)を用いて、拡散または部分拡散画像における端部の対応する測定mが見出される:
1.eに対して垂直な方向におけるpからの1/2画素インターバルで、±y画素のバー1001をサンプリングする。e方向における1/2画素インターバルにおいて、±x画素で、そのようなサンプルを採取する。これにより、4y+1のサンプル1002の配列4x+1バーが得られる(図10に示されている)。モデル化端部が測定端部と平行な場合、測定端部は、このバー配列において水平である。
2.バー配列の水平方向での平坦化(すなわち端部に平行)
3.各バー1003に対して、
A 各サンプルでのバー勾配量の検出
B 最大および2番目に大きな勾配量の検出による、最大および2番目に大きなピークの検出
C 2番目に大きな勾配量が、最大勾配量の少なくとも75%である場合、および最大の閾値数画素内にある場合、次に、第2の候補端部が記録される
4.管の前面を測定する場合、
A 全てのバーにわたるメジアンピーク位置となる中間ピーク位置の設定
5.モデル端部を測定する場合、
A ピーク位置に対する直線フィッティング。この直線の勾配が、<0.1の場合、または勾配が>0.1の場合(すなわち、水平からの角度が〜5.7゜よりも大きい場合)、次に測定が拒絶される
B 第2の候補端部が記録された場合、次に、測定が拒絶される
C その他の場合、中間バーにおいて最大ピークとなる中間ピーク位置が設定される
6.中間ピークの周囲のサンプルの直線内挿による、端部位置のサブサンプル位置の取得。
【0061】
測定画素位置および投射モデル端部を提供することにより、端部に存在する制御点の検出が有効となり、測定は、この制御点から端部に対して垂直に伸びるようになる(図11参照)。
【0062】
端部の、V0’およびV1’の2頂点を考える。これらは、カメラ座標に変換され、画像に投射され、画素位置v0およびv1が与えられる。
【0063】
投射端部の方向dは、
【0064】
【数1】
である。画素測定mが端部からどの程度離れているかを定めることができる。線
【0065】
【数2】
に沿ったこの割合は、λであり、これは、
【0066】
【数3】
で計算される。
【0067】
次に、新たな制御点の画素位置cは、
【0068】
【数4】
となる。従って、新たな制御点のモデル座標Cを、以下のように求めることが可能となる:
【0069】
【数5】
ここで、c-1は、前の制御点画素位置である。
【0070】
3. 欠陥検出、トラッキング、および3Dプロット
欠陥のトラッキングは、ガードルカメラおよびパビリオンカメラの両方によって得られた拡散画像の解析により行われる。2つのカメラの相互に対する位置は、既知であるため、両カメラによって取得された画像を、事前に取得された3Dモデルに直接関連付けることが可能となる。
【0071】
拡散画像を使用し、ハリスコーナー検出器(C. Harris and M. J. Stephens, “A combined corner and edge detector”, Alvey Vision Conference, pages 147-152, 1988に 記載)を用いて、画像内の欠陥である可能性のある候補特徴物が同定される。次に、2Dトラッキングアルゴリズムを用いて、画像シーケンスの隣接フレームにおいて、整合するコーナー部の検出が試みられる。これは、その後、「トラック」に成長する。一旦多くのフレームに特徴物がトラック化されると、次に、カメラおよびモデル形状を用いて、ダイヤモンド体積内での特徴物の3D位置を予測することが可能となる。2つの3D位置が予測される。一つは、特徴物がダイヤモンドのニア表面にあると仮定され、これは、自由空間(自由空間位置)を介してのみ視認される。他方では、特徴物は、ダイヤモンドを介して視認されると仮定される(屈折位置)。屈折位置を予測するため、カメラから観測物までの光線は、これらがダイヤモンドを介して屈折し、反射しているものとして処理される。
【0072】
図12には、ダイヤモンドの2枚の写真を示す。図12には、抽出されたコーナーの特徴物と、コーナーの特徴物のトラックが示されている。図13には、ダイヤモンド1310の3Dモデルを示す。図には、モデル内のトラック化特徴物1311の予測位置が示されている。
【0073】
トラック化されるのは、欠陥の特徴物に限られない、しばしば、2つの面の相互に対するスライドによって生じるような、他の偽特徴物が存在する。これらの特徴物は、クラスター化を進める前に、分類しフィルタ除去する必要がある。これは、内端部の位置を定めることにより、容易化される(次の章において説明する)。
【0074】
トラックは、4つの可能性のあるタイプに分類される:
・閉鎖トラック−別のものの前でスライドした一つの表面によって形成される
・表面トラック(ダイヤモンドの前表面)
・屈折トラック(ダイヤモンド内で反射されるものを含む)
・非許容トラック(すなわち、エラー)
カメラに近い側のダイヤモンドの表面または表面近傍の特徴物は、ダイヤモンドを介して視認される特徴物と区別する必要がある。これは、表面特徴物の実際の位置は、自由空間位置であるためである。一方、特徴物がダイヤモンドを介して視認される場合、その実際の位置は、その屈折位置である。表面特徴物が、丁度ニア表面の前の位置を有する場合、その屈折位置は、ダイヤモンド表面から遠く離れている。
【0075】
以下の全ての指標を満たす場合、特徴物は、表面特徴物として分類される:
・閉鎖特徴物ではない
・閾値よりも長い
・その自由空間RMSエラーは、閾値未満である
・ニア表面の前にあるか、ニア表面に極めて接近している。
【0076】
ほとんどのトラック化特徴物は、ダイヤモンドを介して視認され、屈折特徴物として分類する必要がある。屈折特徴物は、以下の全ての指標を満たす:
・これらは、閉鎖特徴物または表面特徴物として、まだ分類されていない
・ある閾値よりも長い
・第2の閾値よりも小さな屈折RMSエラーを有する。
【0077】
最後に、残りの全てのトラック化特徴物(すなわち、閉鎖、表面、または屈折特徴物として分類できない特徴物)は、誤差であり、許容できないと言える。
【0078】
4. 内端部の位置の決定
輪郭解析により決定されたダイヤモンドモデルは、図14に示すように、ファセット端部の光線トレースに使用される。これらの端部は、後続のプロセスに使用され、観測欠陥が、ダイヤモンドファセットによって生成された散乱の偽像であるかどうかが判断される。この判断は、クラスタ化が実施された後に行われる。
【0079】
特定のフレームでは、各フロントファセットは、概念上、ダイヤモンドを介して、カメラからの光線の方向に向けられ、その後、光線は、フロントファセットを介して屈折される。このファセットは、多くのバックファセットに当たる。フロントファセットを介して視認されるこれらのバックファセットのセグメントは、ポリゴンクリッピングアルゴリズムを用いて決定される。
【0080】
次に、これらのファセットセグメントは、関連するバックファセットで反射し、ダイヤモンドを介して、反射光線の方向に向けられる。次に、衝突するファセット、およびこれらの可視ファセットのセグメントが、再度、ポリゴンクリッピング(Weiler Atherton)アルゴリズムを用いて定められる。このプロセスは、予め定められた最大数の反射まで継続される。
【0081】
その結果、フレームのフロントファセットを介して、一組のポリゴンが視認される。図14には、一例が示されている。これらのポリゴンは、欠陥解析のプロセスに使用され、特定の領域において、バックグラウンドのグレーレベルが決定される。
【0082】
5. 欠陥のクラスタ化
欠陥は、多くの形状およびサイズを取り得る。従って、コーナー検出器は、単一の大きな欠陥に、多くのトラッキング可能な特徴物を検出することができる。その結果、大きな欠陥によって、大群のトラック化特徴物が形成される(図13参照)。図15に示すように、欠陥当たり単一の存在物1511を生成するため、これらの大群の特徴物を関連付けることは有益である。次に、これらのクラスタ、およびそれに含まれる特徴物は、解析され、欠陥の特徴(寸法、形状、および密度)が算定される。
【0083】
異なる指標に基づき、3つのクラスタ化技術が開発されている。ユークリディアン(Euclidian)、マハラノビス(Mahalanobis)、およびグレーレベルである。ユークリディアンクラスタ化技術は、相互に閾値距離未満の距離だけ離れた、全てのトラックを関連付ける(デカルト空間)。マハラノビスクラスタ化技術は、マハラノビス距離が閾値よりも短いクラスタを合併する。グレーレベルクラスタ化技術では、同じフレームの同じファセットを介して観察される観測組を探し、2つのトラックが同じ欠陥上にあると判断した場合、対応するクラスタを合併する。この決定は、画像の画素が2つの観察の間、暗いままであるかどうかに基づき行われる。
【0084】
6. 拡散画像の再評価/欠陥解析
欠陥の内容を解析するため、拡散画像におけるグレーレベルが考慮される。欠陥の部分を含むフレームの領域を定めるため、観測された全てのフロントファセットに、欠陥クラスタの境界体積が背面投射される。次に、これらのフロントファセット内の画素のグレーレベルが検討され、欠陥の内容に関する統計的指標が取得される。
【0085】
(クラスタ境界体積の背面投射)
クラスタ内の各トラック化特徴物は、ファセットによりラベル化される。クラスタは、ファセットを介して視認され、ファセットを介して反射される。これは、トラックの経路である。クラスタからのトラック経路の組み合わせを用いて、クラスタが観測されるファセットが定められる。
【0086】
図16に示すように、組み合わせ経路の各々またはクラスタ観察に対して、関連する画像フレームに、3Dトラック位置が投射され、それらの周囲に凸包が描かれる結果、これらのフレームに、クラスタの境界体積の投射が生じる。
【0087】
各フレームは、クラスタ観察のリスト、およびこれらの関連する投射境界体積を有する。クラスタ観察を有する各フレームに対して、クラスタが観測されるフロントファセットが検討され、これらのフロントファセット内で、画素に基づいた密度が定められる。
【0088】
(個々の欠陥画素密度の決定)
画素が暗くなる量は、欠陥が存在しない場合の画素の強度に関係する。この強度は、適当なパッチにおける局部的なメジアン画素グレーレベルを検出することにより、近似される。画素のバックグラウンドのこの局部的な評価は、画素グレーレベルから差し引かれ、バックグラウンド予測によって得られた結果から、画素の密度値の近似が得られる。
【0089】
バックグラウンドの一定強度領域は、前述のような内端部の背面投射によって定められる。このプロセスのアウトプットは、フレームにおいて、フロントファセットを介して視認される一組のポリゴンである。背面投射ポリゴンは、ポリゴンラベル画像に描かれ、画素が位置するポリゴンを、直接参照することができる。
【0090】
次に、フロントファセットの投射体積内の画素のグレーレベルが検討され、欠陥の内容についての統計的指標が取得される。
【0091】
(投射境界体積の改良)
所与のクラスタの境界体積は、フレーム内の視認できる欠陥の部分よりも有意に小さい(または有意に大きい)。これは、トラック観測の不正確性と、欠陥のある部分のみがトラック化されることによるものである。一旦、ファセット内の各画素に対する画素密度の予測が計算されると、画像とより良く整合するように、この境界領域の形状を改良することが可能となる。
【0092】
密度が調整可能な閾値よりも低く、投射境界体積に含まれる画素は、高知能フラッド充填アルゴリズムを用いてフラッド充填される。アルゴリズムは、内端部および投射境界体積によって、誘導される。フラッド充填領域は、クラスタ観測よりも短い経路を有するファセット端部によって、縮小される必要がある。従って、ファセットポリゴンがクラスタ観察と同じ経路を有する場合、画素は、フラッド充填される。
【0093】
凸包は、クラスタ観察用の全てのフラッド充填領域に描かれ、改良された境界領域が得られる。この領域内の画素を使用して、欠陥の統計的証拠が蓄積される。
【0094】
(境界領域内の画素を用いた欠陥解析)
クラスタ観察境界領域内の画素は、欠陥のいくつかの統計を生成するため、検討され解析される。これらの統計には、以下が含まれる:
・欠陥の平均画素サイズ
・欠陥の平均密度
・単一の緻密な塊か、いくつかの小さな密度「小塊」かに関する、欠陥の形状。
【0095】
画素密度値のメジアン頻度ヒストグラムが計算される。加重数の画素密度を含む各容器(bin)の代わりに、このヒストグラムは、メジアン加重数の画素密度を含む。メジアンを用いることにより、偽クラスタ境界領域がフィルタ除去される。
【0096】
(ヒストグラムの解析)
一旦ヒストグラムが蓄積されると、以下の表に示された統計値が取得される。これらの統計を用いて、別の指標が求められる。例えば、欠陥内の緻密な材料の全量は、メジアン密度をメジアンサイズと掛け合わせることにより、検出される。欠陥が小塊である度合いは、暗さと隙間性(gappiness)の指標を比較することにより判断される。
【0097】
【表1】
追加のまたは他の指標を使用しても良い。
【0098】
7. 欠陥分類
次に、ダイヤモンド内の欠陥配置とともに、得られた統計的指標を用いることにより、検出欠陥の重要度を測定し、これらをストーンの品質グレードに関連付ける分類を形成することが可能となる。
【0099】
前述の実施例の変形は、依然として本発明の範囲に含まれることは明らかである。例えば、ダイヤモンドの測定および解析について説明したが、システムを使用して、他の原石の透明度を定めても良いことは明らかである。
【0100】
また、前述のシステムは、画像撮影のため、規則的な角度インターバルで、ダイヤモンドの回転を停止するステップを有する。別の方法では、ストーンは、既知の角速度で回転され、パルス照射され、カメラは、等しい角度間隔で画像が撮影されるように、規則的なインターバルで作動されても良い。照射は、パルス的に逐次的に行われ(平行、拡散、半拡散、等)、ストーンの単一の回転のみが要求されても良い。その他の方式も、当業者には明らかである。
【特許請求の範囲】
【請求項1】
原石の3Dモデルを取得する方法であって、
一連の個別の増分で、原石を回転するステップと、
前記原石の各回転位置において、以下の工程;
(a)平行光で前記原石を照射する工程、
(b)前記原石の輪郭画像を記録する工程、
(c)拡散光で前記原石を照射する工程、および
(d)前記原石の拡散画像を記録する工程、
を実施するステップと、
前記輪郭画像および拡散画像に含まれる情報を用いて、前記原石の表面の3Dモデルを取得するステップと、
を有する方法。
【請求項2】
さらに、
前記輪郭画像を解析して、初期3Dモデルを取得するステップと、
前記拡散画像に含まれる情報を用いて、前記初期3Dモデルを改良して、前記3Dモデルを取得するステップと、
を有することを特徴とする請求項1に記載の方法。
【請求項3】
さらに、前記拡散画像における端部と、前記初期モデルにおけるファセット端部を整列させるステップ
を有することを特徴とする請求項2に記載の方法。
【請求項4】
さらに、
前記初期モデル端部に対して垂直な方向において、各拡散画像における領域をサンプリングするステップと、
前記領域の中心バーにおける最大勾配の位置を検出するステップと、
を有することを特徴とする請求項3に記載の方法。
【請求項5】
原石の表面の3Dモデルを取得する方法であって、
原石の一連の増分回転位置において得られた、平行光が照射された前記原石の一組の輪郭画像を解析するステップと、
前記原石のファセットの面がカメラの軸と略平行になる、各輪郭画像を同定するステップであって、これにより、前記輪郭画像において、前記ファセットは、ファセットラインとして見え、そのような画像をキーフレームとしてラベル化するステップと、
各キーフレームにおいて、前記ファセットラインに対する法線を計算するステップであって、前記画像の面内の前記ファセットラインに対する法線は、前記3Dモデルのファセットに対する法線に対応するステップと、
を有する方法。
【請求項6】
さらに、
各輪郭画像に対して、前記原石の輪郭に対応する画素を境界付ける凸包が同定されるステップと、
各凸包において、前記原石のファセット同士間の界面に対応するファセット界面点を定めるステップと、
各ファセット界面点での角度において、後続の画像間の変化をモニタするステップと、
ファセット界面点での前記角度が最大または最小となるとき、画像をキーフレームとしてラベル化するステップと、
を有することを特徴とする請求項5に記載の方法。
【請求項7】
キーフレームの前記凸包における最大または最小のファセット界面点の各側のラインは、その画像のファセットラインに対応することを特徴とする請求項6に記載の方法。
【請求項8】
前記原石のクラウンファセットおよびパビリオンファセット用の、ファセット法線が定められることを特徴とする請求項6または7に記載の方法。
【請求項9】
さらに、
前記原石の回転軸を同定することにより、前記原石のテーブルファセットに対する法線を計算するステップ
を有することを特徴とする請求項8に記載の方法。
【請求項10】
さらに、
前記原石の一連の増分回転位置で取得された、拡散光が照射された前記原石の拡散画像を解析することにより、前記3Dモデルを改良するステップ
を有することを特徴とする請求項5乃至9のいずれか一つに記載の方法。
【請求項11】
原石のインクルージョンを検出する方法であって、
請求項1乃至10のいずれか一つに記載の方法を用いて、原石の3Dモデルを生成するステップと、
前記拡散画像における特徴物を同定するステップと、
後続の拡散画像間で、前記特徴物をトラッキングするステップと、
前記原石による光線の反射および屈折を考慮して、前記原石の前記3Dモデルに対して、前記特徴物を配置するステップと、
前記配置された特徴物のいくつかまたは全てを、インクルージョンとして同定するステップと、
を有する方法。
【請求項12】
原石のインクルージョンを検出する方法であって、
一連の個別の増分で原石を回転させるステップと、
前記原石の各回転位置において、以下の工程;
(a)平行光で前記原石を照射する工程、
(b)前記原石の輪郭画像を記録する工程、
(c)拡散光で前記原石を照射する工程、および
(d)前記原石の拡散画像を記録する工程、
を実施するステップと、
前記輪郭画像を解析して、前記原石の表面の3Dモデルを取得するステップと、
前記拡散画像において特徴物を同定するステップと、
後続の拡散画像間で、前記特徴物をトラッキングするステップと、
前記原石による光線の反射および屈折を考慮して、前記原石の前記3Dモデルに対して、前記特徴物を配置するステップと、
前記配置された特徴物のいくつかまたは全てを、インクルージョンとして同定するステップと、
を有する方法。
【請求項13】
前記原石は、前記原石のテーブルファセットに対して略垂直な軸の周りを回転することを特徴とする請求項1乃至12のいずれか一つに記載の方法。
【請求項14】
前記輪郭画像は、略前記原石のガードルに向かって配向されたガードルカメラによって記録されることを特徴とする請求項1乃至13のいずれか一つに記載の方法。
【請求項15】
前記拡散画像は、略前記原石のパビリオンに向かって配向されたパビリオンカメラ、およびガードルカメラによって記録されることを特徴とする請求項1乃至14のいずれか一つに記載の方法。
【請求項16】
原石のインクルージョンを同定する方法であって、
原石の表面の3Dモデルを生成するステップと、
前記原石の一連の増分回転位置において取得された、拡散光が照射された前記原石の一連の拡散画像を解析するステップと、
前記画像における候補特徴物を同定するステップと、
隣接する画像間で、前記特徴物をトラッキングするステップと、
各トラック化特徴物に対して、可能な自由空間位置および前記3Dモデルに対する屈折位置を評価するステップと、
を有し、
前記自由空間位置の計算では、前記特徴物は、前記原石のニア表面にあると仮定され、前記画像が取得されるカメラからの光線は、前記原石を通過せず、
前記屈折位置の計算では、前記特徴物は、前記ダイヤモンドの内部または背面にあると仮定され、前記カメラからの光線は、前記原石を通過し、前記計算では、前記原石による光線の反射および屈折が考慮され、
当該方法は、
偽特徴物をフィルタ除去するステップと、
前記特徴物の屈折位置に対応するインクルージョンを同定するステップと、
を有することを特徴とする方法。
【請求項17】
前記自由空間位置を用いて、前記原石の表面または外側の偽特徴物が、内部対象物から識別されることを特徴とする請求項16に記載の方法。
【請求項18】
各トラック化特徴物は、閉塞特徴物、表面特徴物、屈折特徴物、またはエラー特徴物として分類され、前記屈折特徴物のみを用いて、インクルージョンが同定されることを特徴とする請求項16または17に記載の方法。
【請求項19】
内部画像によって生成された偽特徴物は、
画像において、概念上、前記原石の前記3Dモデルを介して、前記カメラから放射され前記フロントファセットを介して屈折される光線の方向に、フロントファセットを配向し、
ポリゴンクリッピングアルゴリズムを用いて、前記モデルを介して概念上配向された、前記フロントファセットによって衝突する、前記3Dモデルのバックファセットのセグメントを同定し、
前記フロントファセットにおいて、これらのセグメントおよびこれらの間の境界を同定し、
前記フロントファセットに見られる前記セグメントおよび境界を、偽特徴物として分類することにより、
同定されることを特徴とする請求項16、17、または18に記載の方法。
【請求項20】
さらに、
前記バックファセットからのセグメントを概念上反射し、これらを、前記原石の前記モデルを介して、前記反射された光線の方向に沿って配向するステップと、
ポリゴンクリッピングアルゴリズムを用いて、別の衝突するファセット、および前記フロントファセットにおいて視認されるこれらのファセットのセグメントを同定するステップと、
予め定められた反射の最大数まで、前記プロセスを繰り返すステップと、
全てのセグメント、およびそれらの間の境界を、偽特徴物として同定するステップと、
を有することを特徴とする請求項19に記載の方法。
【請求項21】
さらに、
特徴物を相互にクラスタ化して、欠陥を形成するステップを有することを特徴とする請求項16乃至20のいずれか一つに記載の方法。
【請求項22】
各欠陥の、前記3Dモデル内の境界体積が定められることを特徴とする請求項21に記載の方法。
【請求項23】
各境界体積は、全てのフロントファセットに背面投射され、可視化され、
各拡散画像において、各欠陥の背面投射を形成する画素のグレーレベルが解析され、
各欠陥の内容に関する統計指標が取得されることを特徴とする請求項22に記載の方法。
【請求項24】
画素の前記グレーレベルは、前記原石のバックファセットの背面投射によって形成されたマップに対して定められることを特徴とする請求項23に記載の方法。
【請求項25】
前記インクルージョンのパラメータは、前記統計指標から求められることを特徴とする請求項23または24に記載の方法。
【請求項26】
前記特徴物のいくつかまたは全てを、インクルージョンとして同定するステップは、請求項16乃至25のいずれか一つの方法を用いて実施されることを特徴とする請求項11または12に記載の方法。
【請求項27】
さらに、
前記インクルージョンのタイプ、形状、寸法、および/または密度を同定するステップと、
前記同定されたインクルージョンのタイプ、形状、寸法、および/または密度に基づいて、前記原石に透明度値を与えるステップと、
を有することを特徴とする請求項11乃至26のいずれか一つに記載の方法。
【請求項28】
前記原石は、研磨されたダイヤモンドであることを特徴とする請求項1乃至27のいずれか一つに記載の方法。
【請求項29】
請求項1乃至28のいずれか一つに記載の方法を実施するための機器。
【請求項30】
原石の3Dモデルを形成する機器であって、
原石を取り付ける取り付けステージであって、一連の個別の増分で回転可能な取り付けステージと、
前記取り付けステージに向かって配向され、各回転増分位置において、前記原石の画像を記録するための少なくとも一つのカメラと、
前記ダイヤモンドを平行光で照射する平行光源と、
前記ダイヤモンドを拡散光で照射する少なくとも一つの拡散光源と、
前記取り付けステージの回転、前記両光源の動作、および前記少なくとも一つのカメラの動作と協働する制御システムであって、前記原石の各回転位置において、以下の工程:
(a)平行光が照射された前記原石の輪郭画像を、前記カメラによって記録する工程、および
(b)拡散光が照射された前記原石の拡散画像を、前記カメラによって記録する工程、
を実施する制御システムと、
前記輪郭画像および拡散画像を解析して、前記原石の表面の3Dモデルを取得するように配置された処理システムと、
を有する機器。
【請求項31】
前記プロセッサは、前記輪郭画像から、初期3Dモデルを取得するように配置され、
前記初期3Dモデルは、前記拡散画像を用いて改良されることを特徴とする請求項29に記載の機器。
【請求項32】
当該機器は、前記原石のインクルージョンを同定するように適合され、
前記処理システムは、さらに、
前記拡散画像における特徴物を同定し、
後続の拡散画像同士の間で、前記特徴物をトラックし、
前記原石による光線の反射および屈折を考慮して、前記原石の3Dモデルに対して、前記特徴物を配置し、
前記配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定する
ように配置されることを特徴とする請求項30または31に記載の機器。
【請求項33】
原石のインクルージョンを同定する機器であって、
前記原石を取り付けるための取り付けステージであって、一連の個別の増分で回転可能な取り付けステージと、
前記取り付けステージに向かって配向され、各回転増分位置において、前記原石の画像を記録するための少なくとも一つのカメラと、
前記ダイヤモンドを平行光で照射する平行光源と、
前記ダイヤモンドを拡散光で照射する少なくとも一つの拡散光源と、
前記取り付けステージの回転、前記両光源の動作、および前記少なくとも一つのカメラの動作と協働する制御システムであって、前記原石の各回転位置において、以下の工程:
(a)平行光が照射された前記原石の輪郭画像を、前記カメラによって記録する工程、および
(b)拡散光が照射された前記原石の拡散画像を、前記カメラによって記録する工程、
を実施する制御システムと、
処理システムであって、
前記輪郭画像を解析して、前記原石の表面の3Dモデルを取得し、
前記拡散画像における特徴物を同定し、
後続の拡散画像同士の間で、前記特徴物をトラックし、
前記原石による光線の反射および屈折を考慮して、前記原石の3Dモデルに対して、前記特徴物を配置し、
前記配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定する
ように配置された処理システムと、
を有する機器。
【請求項34】
さらに、
前記取り付けステージを回転するステッパモータを有することを特徴とする請求項30乃至33のいずれか一つに記載の機器。
【請求項35】
前記少なくとも一つのカメラは、前記取り付けステージに取り付けられた原石のガードルに向かって配向されたガードルカメラを有し、該ガードルカメラは、前記輪郭画像が記録されるように配置されることを特徴とする請求項30乃至34のいずれか一つに記載の機器。
【請求項36】
さらに、
前記取り付けステージに取り付けられた原石のパビリオンに向かって配向されたパビリオンカメラを有することを特徴とする請求項30乃至35のいずれか一つに記載の機器。
【請求項1】
原石の3Dモデルを取得する方法であって、
一連の個別の増分で、原石を回転するステップと、
前記原石の各回転位置において、以下の工程;
(a)平行光で前記原石を照射する工程、
(b)前記原石の輪郭画像を記録する工程、
(c)拡散光で前記原石を照射する工程、および
(d)前記原石の拡散画像を記録する工程、
を実施するステップと、
前記輪郭画像および拡散画像に含まれる情報を用いて、前記原石の表面の3Dモデルを取得するステップと、
を有する方法。
【請求項2】
さらに、
前記輪郭画像を解析して、初期3Dモデルを取得するステップと、
前記拡散画像に含まれる情報を用いて、前記初期3Dモデルを改良して、前記3Dモデルを取得するステップと、
を有することを特徴とする請求項1に記載の方法。
【請求項3】
さらに、前記拡散画像における端部と、前記初期モデルにおけるファセット端部を整列させるステップ
を有することを特徴とする請求項2に記載の方法。
【請求項4】
さらに、
前記初期モデル端部に対して垂直な方向において、各拡散画像における領域をサンプリングするステップと、
前記領域の中心バーにおける最大勾配の位置を検出するステップと、
を有することを特徴とする請求項3に記載の方法。
【請求項5】
原石の表面の3Dモデルを取得する方法であって、
原石の一連の増分回転位置において得られた、平行光が照射された前記原石の一組の輪郭画像を解析するステップと、
前記原石のファセットの面がカメラの軸と略平行になる、各輪郭画像を同定するステップであって、これにより、前記輪郭画像において、前記ファセットは、ファセットラインとして見え、そのような画像をキーフレームとしてラベル化するステップと、
各キーフレームにおいて、前記ファセットラインに対する法線を計算するステップであって、前記画像の面内の前記ファセットラインに対する法線は、前記3Dモデルのファセットに対する法線に対応するステップと、
を有する方法。
【請求項6】
さらに、
各輪郭画像に対して、前記原石の輪郭に対応する画素を境界付ける凸包が同定されるステップと、
各凸包において、前記原石のファセット同士間の界面に対応するファセット界面点を定めるステップと、
各ファセット界面点での角度において、後続の画像間の変化をモニタするステップと、
ファセット界面点での前記角度が最大または最小となるとき、画像をキーフレームとしてラベル化するステップと、
を有することを特徴とする請求項5に記載の方法。
【請求項7】
キーフレームの前記凸包における最大または最小のファセット界面点の各側のラインは、その画像のファセットラインに対応することを特徴とする請求項6に記載の方法。
【請求項8】
前記原石のクラウンファセットおよびパビリオンファセット用の、ファセット法線が定められることを特徴とする請求項6または7に記載の方法。
【請求項9】
さらに、
前記原石の回転軸を同定することにより、前記原石のテーブルファセットに対する法線を計算するステップ
を有することを特徴とする請求項8に記載の方法。
【請求項10】
さらに、
前記原石の一連の増分回転位置で取得された、拡散光が照射された前記原石の拡散画像を解析することにより、前記3Dモデルを改良するステップ
を有することを特徴とする請求項5乃至9のいずれか一つに記載の方法。
【請求項11】
原石のインクルージョンを検出する方法であって、
請求項1乃至10のいずれか一つに記載の方法を用いて、原石の3Dモデルを生成するステップと、
前記拡散画像における特徴物を同定するステップと、
後続の拡散画像間で、前記特徴物をトラッキングするステップと、
前記原石による光線の反射および屈折を考慮して、前記原石の前記3Dモデルに対して、前記特徴物を配置するステップと、
前記配置された特徴物のいくつかまたは全てを、インクルージョンとして同定するステップと、
を有する方法。
【請求項12】
原石のインクルージョンを検出する方法であって、
一連の個別の増分で原石を回転させるステップと、
前記原石の各回転位置において、以下の工程;
(a)平行光で前記原石を照射する工程、
(b)前記原石の輪郭画像を記録する工程、
(c)拡散光で前記原石を照射する工程、および
(d)前記原石の拡散画像を記録する工程、
を実施するステップと、
前記輪郭画像を解析して、前記原石の表面の3Dモデルを取得するステップと、
前記拡散画像において特徴物を同定するステップと、
後続の拡散画像間で、前記特徴物をトラッキングするステップと、
前記原石による光線の反射および屈折を考慮して、前記原石の前記3Dモデルに対して、前記特徴物を配置するステップと、
前記配置された特徴物のいくつかまたは全てを、インクルージョンとして同定するステップと、
を有する方法。
【請求項13】
前記原石は、前記原石のテーブルファセットに対して略垂直な軸の周りを回転することを特徴とする請求項1乃至12のいずれか一つに記載の方法。
【請求項14】
前記輪郭画像は、略前記原石のガードルに向かって配向されたガードルカメラによって記録されることを特徴とする請求項1乃至13のいずれか一つに記載の方法。
【請求項15】
前記拡散画像は、略前記原石のパビリオンに向かって配向されたパビリオンカメラ、およびガードルカメラによって記録されることを特徴とする請求項1乃至14のいずれか一つに記載の方法。
【請求項16】
原石のインクルージョンを同定する方法であって、
原石の表面の3Dモデルを生成するステップと、
前記原石の一連の増分回転位置において取得された、拡散光が照射された前記原石の一連の拡散画像を解析するステップと、
前記画像における候補特徴物を同定するステップと、
隣接する画像間で、前記特徴物をトラッキングするステップと、
各トラック化特徴物に対して、可能な自由空間位置および前記3Dモデルに対する屈折位置を評価するステップと、
を有し、
前記自由空間位置の計算では、前記特徴物は、前記原石のニア表面にあると仮定され、前記画像が取得されるカメラからの光線は、前記原石を通過せず、
前記屈折位置の計算では、前記特徴物は、前記ダイヤモンドの内部または背面にあると仮定され、前記カメラからの光線は、前記原石を通過し、前記計算では、前記原石による光線の反射および屈折が考慮され、
当該方法は、
偽特徴物をフィルタ除去するステップと、
前記特徴物の屈折位置に対応するインクルージョンを同定するステップと、
を有することを特徴とする方法。
【請求項17】
前記自由空間位置を用いて、前記原石の表面または外側の偽特徴物が、内部対象物から識別されることを特徴とする請求項16に記載の方法。
【請求項18】
各トラック化特徴物は、閉塞特徴物、表面特徴物、屈折特徴物、またはエラー特徴物として分類され、前記屈折特徴物のみを用いて、インクルージョンが同定されることを特徴とする請求項16または17に記載の方法。
【請求項19】
内部画像によって生成された偽特徴物は、
画像において、概念上、前記原石の前記3Dモデルを介して、前記カメラから放射され前記フロントファセットを介して屈折される光線の方向に、フロントファセットを配向し、
ポリゴンクリッピングアルゴリズムを用いて、前記モデルを介して概念上配向された、前記フロントファセットによって衝突する、前記3Dモデルのバックファセットのセグメントを同定し、
前記フロントファセットにおいて、これらのセグメントおよびこれらの間の境界を同定し、
前記フロントファセットに見られる前記セグメントおよび境界を、偽特徴物として分類することにより、
同定されることを特徴とする請求項16、17、または18に記載の方法。
【請求項20】
さらに、
前記バックファセットからのセグメントを概念上反射し、これらを、前記原石の前記モデルを介して、前記反射された光線の方向に沿って配向するステップと、
ポリゴンクリッピングアルゴリズムを用いて、別の衝突するファセット、および前記フロントファセットにおいて視認されるこれらのファセットのセグメントを同定するステップと、
予め定められた反射の最大数まで、前記プロセスを繰り返すステップと、
全てのセグメント、およびそれらの間の境界を、偽特徴物として同定するステップと、
を有することを特徴とする請求項19に記載の方法。
【請求項21】
さらに、
特徴物を相互にクラスタ化して、欠陥を形成するステップを有することを特徴とする請求項16乃至20のいずれか一つに記載の方法。
【請求項22】
各欠陥の、前記3Dモデル内の境界体積が定められることを特徴とする請求項21に記載の方法。
【請求項23】
各境界体積は、全てのフロントファセットに背面投射され、可視化され、
各拡散画像において、各欠陥の背面投射を形成する画素のグレーレベルが解析され、
各欠陥の内容に関する統計指標が取得されることを特徴とする請求項22に記載の方法。
【請求項24】
画素の前記グレーレベルは、前記原石のバックファセットの背面投射によって形成されたマップに対して定められることを特徴とする請求項23に記載の方法。
【請求項25】
前記インクルージョンのパラメータは、前記統計指標から求められることを特徴とする請求項23または24に記載の方法。
【請求項26】
前記特徴物のいくつかまたは全てを、インクルージョンとして同定するステップは、請求項16乃至25のいずれか一つの方法を用いて実施されることを特徴とする請求項11または12に記載の方法。
【請求項27】
さらに、
前記インクルージョンのタイプ、形状、寸法、および/または密度を同定するステップと、
前記同定されたインクルージョンのタイプ、形状、寸法、および/または密度に基づいて、前記原石に透明度値を与えるステップと、
を有することを特徴とする請求項11乃至26のいずれか一つに記載の方法。
【請求項28】
前記原石は、研磨されたダイヤモンドであることを特徴とする請求項1乃至27のいずれか一つに記載の方法。
【請求項29】
請求項1乃至28のいずれか一つに記載の方法を実施するための機器。
【請求項30】
原石の3Dモデルを形成する機器であって、
原石を取り付ける取り付けステージであって、一連の個別の増分で回転可能な取り付けステージと、
前記取り付けステージに向かって配向され、各回転増分位置において、前記原石の画像を記録するための少なくとも一つのカメラと、
前記ダイヤモンドを平行光で照射する平行光源と、
前記ダイヤモンドを拡散光で照射する少なくとも一つの拡散光源と、
前記取り付けステージの回転、前記両光源の動作、および前記少なくとも一つのカメラの動作と協働する制御システムであって、前記原石の各回転位置において、以下の工程:
(a)平行光が照射された前記原石の輪郭画像を、前記カメラによって記録する工程、および
(b)拡散光が照射された前記原石の拡散画像を、前記カメラによって記録する工程、
を実施する制御システムと、
前記輪郭画像および拡散画像を解析して、前記原石の表面の3Dモデルを取得するように配置された処理システムと、
を有する機器。
【請求項31】
前記プロセッサは、前記輪郭画像から、初期3Dモデルを取得するように配置され、
前記初期3Dモデルは、前記拡散画像を用いて改良されることを特徴とする請求項29に記載の機器。
【請求項32】
当該機器は、前記原石のインクルージョンを同定するように適合され、
前記処理システムは、さらに、
前記拡散画像における特徴物を同定し、
後続の拡散画像同士の間で、前記特徴物をトラックし、
前記原石による光線の反射および屈折を考慮して、前記原石の3Dモデルに対して、前記特徴物を配置し、
前記配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定する
ように配置されることを特徴とする請求項30または31に記載の機器。
【請求項33】
原石のインクルージョンを同定する機器であって、
前記原石を取り付けるための取り付けステージであって、一連の個別の増分で回転可能な取り付けステージと、
前記取り付けステージに向かって配向され、各回転増分位置において、前記原石の画像を記録するための少なくとも一つのカメラと、
前記ダイヤモンドを平行光で照射する平行光源と、
前記ダイヤモンドを拡散光で照射する少なくとも一つの拡散光源と、
前記取り付けステージの回転、前記両光源の動作、および前記少なくとも一つのカメラの動作と協働する制御システムであって、前記原石の各回転位置において、以下の工程:
(a)平行光が照射された前記原石の輪郭画像を、前記カメラによって記録する工程、および
(b)拡散光が照射された前記原石の拡散画像を、前記カメラによって記録する工程、
を実施する制御システムと、
処理システムであって、
前記輪郭画像を解析して、前記原石の表面の3Dモデルを取得し、
前記拡散画像における特徴物を同定し、
後続の拡散画像同士の間で、前記特徴物をトラックし、
前記原石による光線の反射および屈折を考慮して、前記原石の3Dモデルに対して、前記特徴物を配置し、
前記配置されたいくつかまたは全ての特徴物を、インクルージョンとして同定する
ように配置された処理システムと、
を有する機器。
【請求項34】
さらに、
前記取り付けステージを回転するステッパモータを有することを特徴とする請求項30乃至33のいずれか一つに記載の機器。
【請求項35】
前記少なくとも一つのカメラは、前記取り付けステージに取り付けられた原石のガードルに向かって配向されたガードルカメラを有し、該ガードルカメラは、前記輪郭画像が記録されるように配置されることを特徴とする請求項30乃至34のいずれか一つに記載の機器。
【請求項36】
さらに、
前記取り付けステージに取り付けられた原石のパビリオンに向かって配向されたパビリオンカメラを有することを特徴とする請求項30乃至35のいずれか一つに記載の機器。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公表番号】特表2013−510302(P2013−510302A)
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−537371(P2012−537371)
【出願日】平成22年11月2日(2010.11.2)
【国際出願番号】PCT/EP2010/066641
【国際公開番号】WO2011/054822
【国際公開日】平成23年5月12日(2011.5.12)
【出願人】(512116343)デ ビアーズ センテナリー アーゲー (2)
【Fターム(参考)】
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成22年11月2日(2010.11.2)
【国際出願番号】PCT/EP2010/066641
【国際公開番号】WO2011/054822
【国際公開日】平成23年5月12日(2011.5.12)
【出願人】(512116343)デ ビアーズ センテナリー アーゲー (2)
【Fターム(参考)】
[ Back to top ]