
研磨装置において基板を監視する方法及び研磨システムで基板を搬送する方法
【課題】研磨装置において二枚以上の基板を監視する方法を提供する。
【解決手段】研磨装置において二枚以上の基板を監視する方法が、第1の方向に第1基板を移動させ、監視システムの隣りに配置されたバッファステーション内に当該第1基板を移動させるステップと、第1の方向に直角な第2の方向に前記第1基板を移動させて、第1基板に対して監視プロセスを行うステップと、第2基板を取り出してバッファステーション内に移動させるステップと、第1基板を前記バッファステーションから取り出すステップと、を備える。
【解決手段】研磨装置において二枚以上の基板を監視する方法が、第1の方向に第1基板を移動させ、監視システムの隣りに配置されたバッファステーション内に当該第1基板を移動させるステップと、第1の方向に直角な第2の方向に前記第1基板を移動させて、第1基板に対して監視プロセスを行うステップと、第2基板を取り出してバッファステーション内に移動させるステップと、第1基板を前記バッファステーションから取り出すステップと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板を研磨する方法および装置に関し、特に、ケミカルメカニカルポリシングツールのスループットを向上させるようにケミカルメカニカルポリシングツールの計測装置に付随したバッファステーションに関する。
【背景技術】
【0002】
集積回路や他の電子デバイスの製造においては、導電材料、半導体材料および誘電材料からなる複数の層が製造プロセス中に堆積し、基板から除去される。高いトポグラフィー、表面欠陥、スクラッチまたは埋込み粒子を除去するために、基板表面を研磨する必要がしばしば生じる。ポリシングプロセスは、しばしばケミカルメカニカルポリシング(CMP)と呼ばれ、基板上に形成された電子デバイスの品質と信頼性を向上させるために用いられる。
【0003】
一般的に、ポリシングプロセスには、スラリーまたは他の流体媒質が存在するなかで制御された圧力および温度下で基板を保持して研磨パッドに当てるステップが含まれる。通常、このポリシングプロセスは、ポリシングプロセス中に化学スラリーを導入して、基板表面上の膜の除去速度および膜間の選択比を高めるステップを含んでいる。CMPを行なうために用いられるポリシングシステムの一つは、Applied Materials社から市販されているMirra(商標)CMPシステムであり、これは、米国特許第5,738,574号「ケミカルメカニカルポリシング用連続処理システム」に図示および記載されている。この特許公報の全体は、参照により本明細書に組み込まれる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ポリシングプロセスにおいて遭遇する問題の一つは、基板表面からの非均一な膜の除去である。除去速度は、基板に加える下向きの圧力、研磨パッドの回転速度、粒子密度や粒子サイズを含むスラリー組成、および基板表面と研磨パッドとの間の実効接触領域が関係している。また、除去速度は、基板の中央と対照的に、基板のエッジにおいて高くなる傾向がある。
【0005】
CMPにおいて遭遇する別の問題は、基板上に堆積した不均一な層を除去することが難しいことである。基板上で電子デバイスを製造している間は、基板の特定領域で層が堆積または成長するので、基板表面の全体で平坦でないトポロジーができることがある。CMPプロセスは、不必要なトポロジーを除去し、基板上に実質的に平坦な表面を形成するために使われる。基板上に堆積する膜の厚さは非常に薄く(0.5〜5.0ミクロンのオーダー)、そのため不均一な除去に対する許容度は少ない。基板上の歪んだ表面を研磨しようとするときにも同様の問題が生じる。基板は、様々な熱サイクルにさらされるために製造プロセス中に反ってしまうことがある。基板が受けた反りのために、基板は高い領域と低い領域を有することになり、低い領域に比べて高い領域のほうがより多く研磨されてしまう。
【0006】
電子デバイスの生産を監視するため、特にポリシングプロセスの結果を監視するために、CMPシステムには、プリモニタリングシステムおよびポストモニタリングシステムが含まれている。このようなモニタリングシステムの一つは、イスラエルのNova Measuring Instruments社(およびカリフォルニア州サニーベイルのNova Measuring Instruments社)から市販されており、NovaScan420として販売されている。NovaScan420は、Mirra(商標)CMPシステムにおいて好適に使用されており、処理後に基板を検査するウェット基板検査プロセスを行う。使用可能なモニタリングシステムの不都合な点の一つは、一枚分の基板容量しかないということである。その結果、スループット、すなわち単位時間あたりに処理される基板の数は、望ましいものよりも少なくなる。使用可能なモニタリングシステムは、処理用の一枚の基板を受け取る基板支持体を一つしか有していない。その結果、ロボット搬送システムは、システム内の保管場所への評価済基板の搬送を実行し、その後、モニタリングシステム内の別の基板を回収して配置するために、数多く移動を行わなければならない。ロボット搬送システムに要求される付加的な移動のために、モニタリングシステムのアイドル時間が増え、基板のハンドリングに必要な総時間が増えてしまう。これにより、CMPシステムにおける基板のスループットが低下する。
【0007】
従って、CMPツールのスループットを高めるために一枚以上の基板を支持するバッファステーションをもつCMPツールが要望されている。
【課題を解決するための手段】
【0008】
本発明は、一般的には、CMPツールにおいて一枚以上の基板を保管する方法および装置を提供する。この方法および装置は、好ましくは、二枚以上の基板を受け取り、基板シャトルシーケンスまたは基板ハンドオフシーケンスを行ってCMPシステムのスループットを高めることができる。
【0009】
本発明のある態様では、二枚以上の基板を受け取るために基板キャリアまたはバッファステーションが隣りに配置された基板検査装置が設けられ、これにより、バッファステーションおよび自動化装置(ロボットなど)間の効率の良い基板搬送を可能にしている。バッファステーションは、第1基板受取り位置、第2閉鎖基板アライメント位置および第3基板通過位置の間で一対の基板支持体を互いに対して相対的に横方向へ動かす作動アセンブリに連結された二つ以上の基板支持体を含むことが好ましい。これらの支持体は、基板受取り位置および基板アライメント位置では、検査装置の垂直上方で基板を保持する。
【0010】
好適な態様では、基板支持体が支持支柱に取り付けられ、この支持支柱は、支持体を開閉する空気作動アセンブリに連結される。ある態様では、基板支持体は積み重ね構造で連結される。あるいは、より多くの基板支持体を支持するために複数の支柱を設けることもできる。
【0011】
本発明の方法によれば、第1の基板がバッファステーションにロードされ、自動化装置による検査のために位置決めされる基板処理シーケンスが行われる。検査プロセスが完了すると、第2の基板が、第1基板支持体の隣りに配置された第2基板支持体に送られる。処理済基板は、自動化装置によって第1基板支持体から取り出され、システム内の適切な場所に保管される。第2基板は、以前に検査された基板がシステム内の別の場所に置かれている間に、検査のために装置内で位置決めされる。検査済基板が適切な場所に保管された後、自動化装置は別の基板をバッファステーション内の開いた基板支持体に供給することができる。システムを通過する基板の搬送を含むCMPシステムの動作を制御するために、システムコントローラが設けられていることが好ましい。
【0012】
上記に示された本発明の特徴、利点および目的が達成される方法を詳細に理解することができるように、上記で要約した本発明を添付の図面に示される実施形態を参照して更に具体的に説明する。
【0013】
しかしながら、添付の図面は本発明の典型的な実施形態を示すものに過ぎず、本発明の範囲を制限するものとみなすべきでない。本発明は、同等に効果的な他の実施形態も許容している。
【発明を実施するための形態】
【0014】
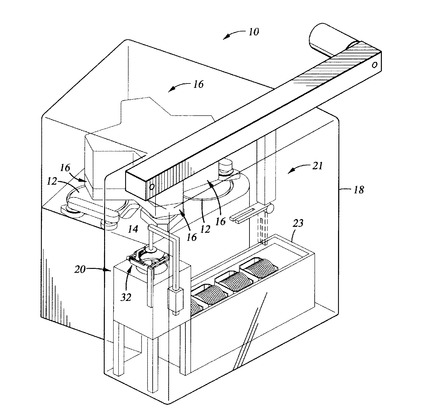
図1は、カリフォルニア州サンタクララのアプライドマテリアルズ社から市販されているMirra(商標)システムのようなCMPシステム10の概略図である。図示のシステム10は、三つの回転プラテン12(二つのみ図示)とローディングステーション14を含んでいる。四つの研磨ヘッド16は、回転プラテンおよびローディングステーションの上方に回転可能に取り付けられている。通常は、基板をローディングステーションにおいて研磨ヘッド上にロードした後、回転プラテンを有する三つのステーションによって研磨ヘッドおよび基板を回転させる。三つの回転プラテン12には、通常、研磨パッドが取り付けられている。一つのプロセスシーケンスは、最初の二つのステーションにおいて研磨パッドを含み、第3のステーションにおいて洗浄パッドを含んでいて、ポリシングプロセスの最後における基板洗浄を容易にしている。この他に、研磨パッドは各プラテン上に搭載することもできる。
【0015】
先端基板搬送領域18は、CMPシステムに隣接して配置され、CMPシステムの一部とみなされる。ただし、この搬送領域は別個の構成要素であってもよい。基板検査ステーション20は、システムに導入された基板のプロセス前検査および/またはプロセス後検査を可能にするために、基板搬送領域またはその近傍に配置される。システムに組み込むことができ、本発明の利益を享受することができる検査ステーションの一つは、NovaScan420である。他の検査システムも、本発明で有用に使用することができる。NovaScan420の利点の一つは、基板が湿った状態で装置に導入され、検査プロセスの間、湿った状態に維持されることにより、基板上でのスラリーや他の物質の乾燥が防止されることである。最初の保管槽23からシステム内に基板を動かし、その後、保管槽へ基板を戻すために、オーバヘッド自動化装置21(例えば、ロボット)が搬送領域18内に設けられている。本発明のバッファステーション32は、検査ステーション20上に配置される。
【0016】
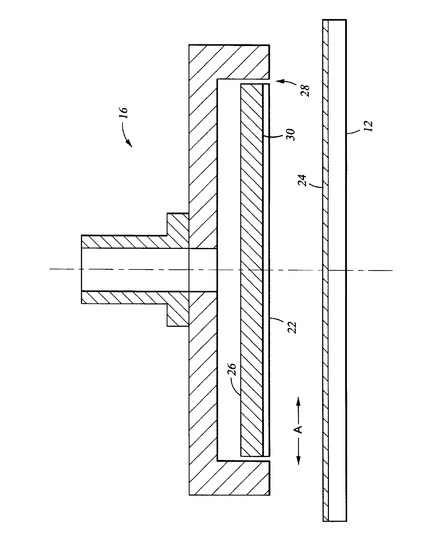
図2は、本発明において好適に用いられるポリシングステーションの概略図である。研磨ヘッド16は、ポリシングのために基板22を支持する。本発明において好適に用いることができる研磨ヘッドの一つは、カリフォルニア州サンタクララのApplied Materials社から市販されているTitan Head(商標)である。回転可能なプラテン12は、モータまたは他の適切な駆動機構によって中心軸Xの周りに速度Vpで回転させられる。プラテンは、時計回りか反時計回りに回転させることができる。このプラテンには、パッド24が取り付けられている。パッドは、Rodel社などのメーカから市販されている。研磨ヘッド16は、モータまたは他の駆動機構に連結されていることが好ましく、プラテンの上方に配置することができる。研磨ヘッドは基板を支持し、ポリシングプロセス中に基板をパッドに当てて保持する。研磨ヘッドは、基板表面の研磨を促進するために、基板がパッドと接触したときに基板の裏面に制御された圧力を加える。モータまたは他の駆動機構は、研磨ヘッドおよび基板を速度Vsで時計回りか反時計回りに、好ましくはプラテンと同じ向きに回転させる。研磨ヘッドは、矢印Aで示される方向において径方向にプラテンを横切るように移動することが好ましい。研磨ヘッドは、処理中に基板を保持するための真空チャック26を有している。真空チャックは、基板表面の後ろに負の真空力を生成し、基板を研磨ヘッドに引きつけて保持する。研磨ヘッドは、通常、ポケット28を含んでいる。ポケット28では、基板が少なくとも最初は真空下で支持される。基板がポケット内に配置され、パッド上に配置されると、真空が解除される。真空が解除された場合に基板の回転を防ぐため、摩擦表面30が研磨ヘッド上に設けられている。真空チャックが好適ではあるが、他の基板保持機構も使用することができる。
【0017】
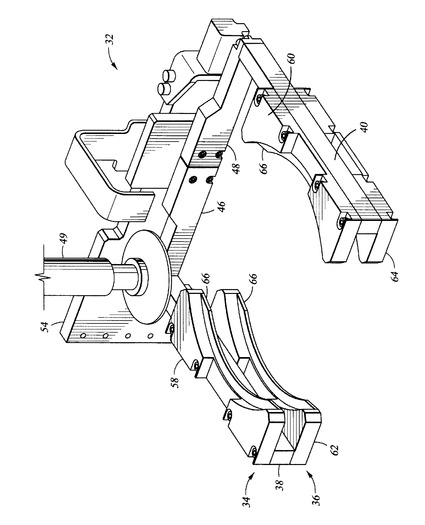
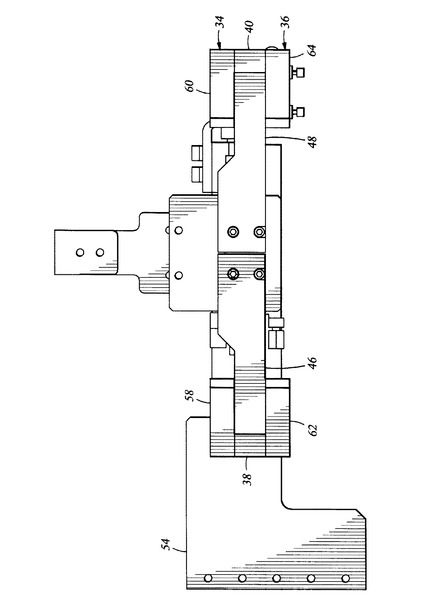
図3は、検査ステーション20(図1に図示)に隣接して配置された二つの基板支持アセンブリ34、36を有するバッファステーション32の斜視図である。図示の態様では、バッファステーションが、少なくとも部分的に検査ステーションの上方に配置されている。バッファステーションは、一対の支持支柱38、40上に取り付けられた二対の基板支持アセンブリ34、36を含んでいる。支持支柱38、40は、それぞれ可動取付プレート46、48に取り付けられた各カンチレバーである。可動取付プレート46、48は、駆動アセンブリ56(図4に図示)およびアクチュエータ(ステッパモータや空気シリンダなど)によって取付プレート54に連結される。駆動機構は、支持支柱38、40とそれに連結された基板支持アセンブリを、横方向において、互いに向かって移動させるか、あるいは互いから離れるように移動させる。検査ステーションに付随した真空アーム49は基板を取り上げ、基板を支持して、基板を基板搬送面から検査ステーション内の検査面へ下方に移動させる。基板支持アセンブリ34、36は、基板支持ショルダまたは凹部66を有する一対の対向プレート58、60、62、64を含んでいる。基板支持凹部66は、基板を支持するために、これらのプレートの少なくとも一部に形成されている。対向する一対の凹部66の各々は、基板の対向するエッジの周辺で基板支持体を形成する。
【0018】
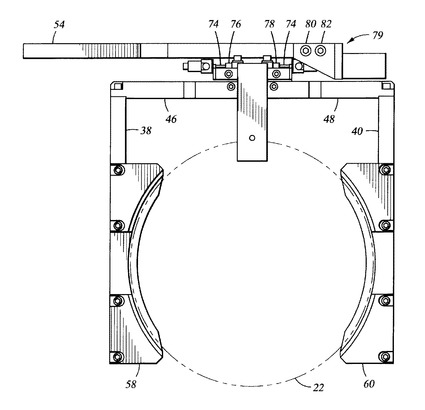
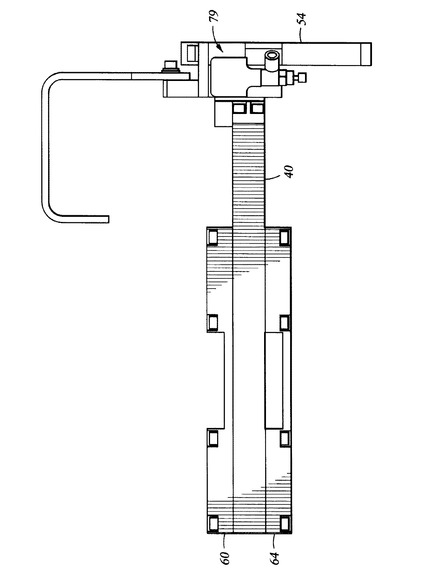
図4は、一対の可動支柱38、40に取り付けられた一対の基板支持プレート58、60を示す上部基板支持アセンブリの平面図である。基板22は、その上に配置されるように示されている。可動支柱は、それぞれ可動取付プレート46、48に取り付けられており、可動取付プレート46、48は、直線ガイド76、78によってガイドピン74に連結されている。流入口80と流出口82は、空気アクチュエータ79へ流体を送り、支持支柱を三つの位置に動かす。すなわち、基板センタリング位置、基板受取り位置、または基板を通過させることができる開位置である。図4には、小さな隙間が基板のエッジと基板支持プレート58、60との間に画成されている基板受取り位置におけるバッファステーションが示されている。
【0019】
図5は、基板センタリング位置において縦に積み重ねられた配置に設置された二つの基板支持アセンブリ34、36を示す正面図である。可動取付プレート46、48は、基板センタリングのために後退した位置にある。この位置では、基板支持プレート58、60、62、64も、閉じた基板センタリング位置にある。流体が空気アクチュエータへ送られると、可動取付プレート46、48は、基板受取り位置または基板通過位置へ向かって横に移動する。
【0020】
図6は、二つの隣接した基板支持プレート60、64間の間隔を示すバッファステーションの側面図である。これらの基板支持プレート間、および支持ショルダ66の基板支持面間には十分な間隔が設けられており、ロボットブレードが離間した基板支持プレートの各対に配置された二つの基板間を通過することができ、またロボットブレードによって基板を支持ショルダ66に供給し、そこから基板を取り上げることができるようになっている。支持体38、40の厚さは、プレート間に必要な間隔を与えるような大きさにすることができる。更に、プレートも、必要な間隔を与えるような寸法にすることができる。
【0021】
動作中、基板搬送ロボットは、基板受取り位置にある上部または下部基板支持アセンブリ34、36のいずれか(本例では、上部基板支持体)に第1基板を供給する。ロボット上の垂直アクチュエータは、ロボットが上部基板支持プレート58、60上に基板を下ろすことができるようにし、空気アクチュエータは、可動取付プレート46、48を閉じて、上部プレート58、60上に支持された基板をセンタリングする。次に、ロボットは後退する。次いで、検査装置の真空アーム49が下げられ、その下端に基板が設置される。次に、基板支持プレートが開かれ、これにより、真空アーム49は、支持している基板を下方に移動して支持プレートを通過させ、検査装置に入れることができるようになる。検査プロセスが完了すると、真空アームは上部または下部基板支持アセンブリ34、36の上方に基板を移動するが、支持プレートは開いた通過位置にある。基板が所望のプレート対の上方に配置されると、基板支持アセンブリは、基板受取り位置まで閉じられる。真空アーム49が基板を支持プレートへ供給し、所望のプレート対上に支持されるべき基板を解放する。次に、ロボットは、空いている支持プレート対へ第2の基板を上記動作によって供給する。次に、ロボットは、供給ステップの順序を逆にすることにより、検査済基板を持ち上げる。検査済基板がロボット上で位置決めされ、ロボットが後退し、検査済基板をシステム内の他の場所へ移動させる。検査済基板が取り出された後、真空アーム49が新しい基板を取り上げ、その後、基板を検査装置内に移動するために用いられるシーケンスが行なわれる。
【0022】
この操作方法は、基板シャトル操作の実行を可能にする。この基板シャトル操作では、第2の基板の取り上げならびに基板支持体への移送および検査システムへの搬入が可能になる前に検査済基板を回収して配置するようにロボットに命令することなく、検査を必要とする基板が基板支持体上に配置され、検査済基板が取り出される。システム中の基板搬送(検査装置への搬入および検査装置からの搬出を含む)を制御するシステムコントローラが設置されることが好ましい。
【0023】
上、下、横、縦などの用語は相対的な用語であり、限定的なものではないことは理解されるべきである。基板を様々な向きで処理することができる他の構造も本発明の意図に含まれている。
【0024】
上記は本発明の好適な実施形態に関するものであるが、本発明の他の実施形態も本発明の基本的な範囲から逸脱することなく考案することができる。本発明の範囲は、特許請求の範囲によって定められる。
【図面の簡単な説明】
【0025】
【図1】本発明のCMPシステムの概略図である。
【図2】ポリシングステーションの概略断面図である。
【図3】二つの基板支持体を有するバッファステーションの斜視図である。
【図4】一対の可動支柱に取り付けられた一対の基板支持プレートを示す上部基板支持アセンブリの平面図である。
【図5】縦に積み重ねて取り付けられた二つの基板支持アセンブリを示す前面図である。
【図6】袋構造の二つの基板支持アセンブリを示す側面図である。
【符号の説明】
【0026】
10…システム、12…回転プラテン、14…ローディングステーション、16…研磨ヘッド、18…先端基板搬送領域、20…基板検査ステーション、21…オーバヘッド自動化装置、22…基板、23…保管槽、24…パッド、26…真空チャック、28…ポケット、30…摩擦面、32…バッファステーション、34…下部基板支持アセンブリ、38…可動支柱、46…可動取付プレート、49…真空アーム、56…駆動アセンブリ、58、60…基板支持プレート、66…基板支持凹部、74…ガイドピン、76…直線ガイド、79…空気アクチュエータ、80…流入口、82…流出口。
【技術分野】
【0001】
本発明は、基板を研磨する方法および装置に関し、特に、ケミカルメカニカルポリシングツールのスループットを向上させるようにケミカルメカニカルポリシングツールの計測装置に付随したバッファステーションに関する。
【背景技術】
【0002】
集積回路や他の電子デバイスの製造においては、導電材料、半導体材料および誘電材料からなる複数の層が製造プロセス中に堆積し、基板から除去される。高いトポグラフィー、表面欠陥、スクラッチまたは埋込み粒子を除去するために、基板表面を研磨する必要がしばしば生じる。ポリシングプロセスは、しばしばケミカルメカニカルポリシング(CMP)と呼ばれ、基板上に形成された電子デバイスの品質と信頼性を向上させるために用いられる。
【0003】
一般的に、ポリシングプロセスには、スラリーまたは他の流体媒質が存在するなかで制御された圧力および温度下で基板を保持して研磨パッドに当てるステップが含まれる。通常、このポリシングプロセスは、ポリシングプロセス中に化学スラリーを導入して、基板表面上の膜の除去速度および膜間の選択比を高めるステップを含んでいる。CMPを行なうために用いられるポリシングシステムの一つは、Applied Materials社から市販されているMirra(商標)CMPシステムであり、これは、米国特許第5,738,574号「ケミカルメカニカルポリシング用連続処理システム」に図示および記載されている。この特許公報の全体は、参照により本明細書に組み込まれる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ポリシングプロセスにおいて遭遇する問題の一つは、基板表面からの非均一な膜の除去である。除去速度は、基板に加える下向きの圧力、研磨パッドの回転速度、粒子密度や粒子サイズを含むスラリー組成、および基板表面と研磨パッドとの間の実効接触領域が関係している。また、除去速度は、基板の中央と対照的に、基板のエッジにおいて高くなる傾向がある。
【0005】
CMPにおいて遭遇する別の問題は、基板上に堆積した不均一な層を除去することが難しいことである。基板上で電子デバイスを製造している間は、基板の特定領域で層が堆積または成長するので、基板表面の全体で平坦でないトポロジーができることがある。CMPプロセスは、不必要なトポロジーを除去し、基板上に実質的に平坦な表面を形成するために使われる。基板上に堆積する膜の厚さは非常に薄く(0.5〜5.0ミクロンのオーダー)、そのため不均一な除去に対する許容度は少ない。基板上の歪んだ表面を研磨しようとするときにも同様の問題が生じる。基板は、様々な熱サイクルにさらされるために製造プロセス中に反ってしまうことがある。基板が受けた反りのために、基板は高い領域と低い領域を有することになり、低い領域に比べて高い領域のほうがより多く研磨されてしまう。
【0006】
電子デバイスの生産を監視するため、特にポリシングプロセスの結果を監視するために、CMPシステムには、プリモニタリングシステムおよびポストモニタリングシステムが含まれている。このようなモニタリングシステムの一つは、イスラエルのNova Measuring Instruments社(およびカリフォルニア州サニーベイルのNova Measuring Instruments社)から市販されており、NovaScan420として販売されている。NovaScan420は、Mirra(商標)CMPシステムにおいて好適に使用されており、処理後に基板を検査するウェット基板検査プロセスを行う。使用可能なモニタリングシステムの不都合な点の一つは、一枚分の基板容量しかないということである。その結果、スループット、すなわち単位時間あたりに処理される基板の数は、望ましいものよりも少なくなる。使用可能なモニタリングシステムは、処理用の一枚の基板を受け取る基板支持体を一つしか有していない。その結果、ロボット搬送システムは、システム内の保管場所への評価済基板の搬送を実行し、その後、モニタリングシステム内の別の基板を回収して配置するために、数多く移動を行わなければならない。ロボット搬送システムに要求される付加的な移動のために、モニタリングシステムのアイドル時間が増え、基板のハンドリングに必要な総時間が増えてしまう。これにより、CMPシステムにおける基板のスループットが低下する。
【0007】
従って、CMPツールのスループットを高めるために一枚以上の基板を支持するバッファステーションをもつCMPツールが要望されている。
【課題を解決するための手段】
【0008】
本発明は、一般的には、CMPツールにおいて一枚以上の基板を保管する方法および装置を提供する。この方法および装置は、好ましくは、二枚以上の基板を受け取り、基板シャトルシーケンスまたは基板ハンドオフシーケンスを行ってCMPシステムのスループットを高めることができる。
【0009】
本発明のある態様では、二枚以上の基板を受け取るために基板キャリアまたはバッファステーションが隣りに配置された基板検査装置が設けられ、これにより、バッファステーションおよび自動化装置(ロボットなど)間の効率の良い基板搬送を可能にしている。バッファステーションは、第1基板受取り位置、第2閉鎖基板アライメント位置および第3基板通過位置の間で一対の基板支持体を互いに対して相対的に横方向へ動かす作動アセンブリに連結された二つ以上の基板支持体を含むことが好ましい。これらの支持体は、基板受取り位置および基板アライメント位置では、検査装置の垂直上方で基板を保持する。
【0010】
好適な態様では、基板支持体が支持支柱に取り付けられ、この支持支柱は、支持体を開閉する空気作動アセンブリに連結される。ある態様では、基板支持体は積み重ね構造で連結される。あるいは、より多くの基板支持体を支持するために複数の支柱を設けることもできる。
【0011】
本発明の方法によれば、第1の基板がバッファステーションにロードされ、自動化装置による検査のために位置決めされる基板処理シーケンスが行われる。検査プロセスが完了すると、第2の基板が、第1基板支持体の隣りに配置された第2基板支持体に送られる。処理済基板は、自動化装置によって第1基板支持体から取り出され、システム内の適切な場所に保管される。第2基板は、以前に検査された基板がシステム内の別の場所に置かれている間に、検査のために装置内で位置決めされる。検査済基板が適切な場所に保管された後、自動化装置は別の基板をバッファステーション内の開いた基板支持体に供給することができる。システムを通過する基板の搬送を含むCMPシステムの動作を制御するために、システムコントローラが設けられていることが好ましい。
【0012】
上記に示された本発明の特徴、利点および目的が達成される方法を詳細に理解することができるように、上記で要約した本発明を添付の図面に示される実施形態を参照して更に具体的に説明する。
【0013】
しかしながら、添付の図面は本発明の典型的な実施形態を示すものに過ぎず、本発明の範囲を制限するものとみなすべきでない。本発明は、同等に効果的な他の実施形態も許容している。
【発明を実施するための形態】
【0014】
図1は、カリフォルニア州サンタクララのアプライドマテリアルズ社から市販されているMirra(商標)システムのようなCMPシステム10の概略図である。図示のシステム10は、三つの回転プラテン12(二つのみ図示)とローディングステーション14を含んでいる。四つの研磨ヘッド16は、回転プラテンおよびローディングステーションの上方に回転可能に取り付けられている。通常は、基板をローディングステーションにおいて研磨ヘッド上にロードした後、回転プラテンを有する三つのステーションによって研磨ヘッドおよび基板を回転させる。三つの回転プラテン12には、通常、研磨パッドが取り付けられている。一つのプロセスシーケンスは、最初の二つのステーションにおいて研磨パッドを含み、第3のステーションにおいて洗浄パッドを含んでいて、ポリシングプロセスの最後における基板洗浄を容易にしている。この他に、研磨パッドは各プラテン上に搭載することもできる。
【0015】
先端基板搬送領域18は、CMPシステムに隣接して配置され、CMPシステムの一部とみなされる。ただし、この搬送領域は別個の構成要素であってもよい。基板検査ステーション20は、システムに導入された基板のプロセス前検査および/またはプロセス後検査を可能にするために、基板搬送領域またはその近傍に配置される。システムに組み込むことができ、本発明の利益を享受することができる検査ステーションの一つは、NovaScan420である。他の検査システムも、本発明で有用に使用することができる。NovaScan420の利点の一つは、基板が湿った状態で装置に導入され、検査プロセスの間、湿った状態に維持されることにより、基板上でのスラリーや他の物質の乾燥が防止されることである。最初の保管槽23からシステム内に基板を動かし、その後、保管槽へ基板を戻すために、オーバヘッド自動化装置21(例えば、ロボット)が搬送領域18内に設けられている。本発明のバッファステーション32は、検査ステーション20上に配置される。
【0016】
図2は、本発明において好適に用いられるポリシングステーションの概略図である。研磨ヘッド16は、ポリシングのために基板22を支持する。本発明において好適に用いることができる研磨ヘッドの一つは、カリフォルニア州サンタクララのApplied Materials社から市販されているTitan Head(商標)である。回転可能なプラテン12は、モータまたは他の適切な駆動機構によって中心軸Xの周りに速度Vpで回転させられる。プラテンは、時計回りか反時計回りに回転させることができる。このプラテンには、パッド24が取り付けられている。パッドは、Rodel社などのメーカから市販されている。研磨ヘッド16は、モータまたは他の駆動機構に連結されていることが好ましく、プラテンの上方に配置することができる。研磨ヘッドは基板を支持し、ポリシングプロセス中に基板をパッドに当てて保持する。研磨ヘッドは、基板表面の研磨を促進するために、基板がパッドと接触したときに基板の裏面に制御された圧力を加える。モータまたは他の駆動機構は、研磨ヘッドおよび基板を速度Vsで時計回りか反時計回りに、好ましくはプラテンと同じ向きに回転させる。研磨ヘッドは、矢印Aで示される方向において径方向にプラテンを横切るように移動することが好ましい。研磨ヘッドは、処理中に基板を保持するための真空チャック26を有している。真空チャックは、基板表面の後ろに負の真空力を生成し、基板を研磨ヘッドに引きつけて保持する。研磨ヘッドは、通常、ポケット28を含んでいる。ポケット28では、基板が少なくとも最初は真空下で支持される。基板がポケット内に配置され、パッド上に配置されると、真空が解除される。真空が解除された場合に基板の回転を防ぐため、摩擦表面30が研磨ヘッド上に設けられている。真空チャックが好適ではあるが、他の基板保持機構も使用することができる。
【0017】
図3は、検査ステーション20(図1に図示)に隣接して配置された二つの基板支持アセンブリ34、36を有するバッファステーション32の斜視図である。図示の態様では、バッファステーションが、少なくとも部分的に検査ステーションの上方に配置されている。バッファステーションは、一対の支持支柱38、40上に取り付けられた二対の基板支持アセンブリ34、36を含んでいる。支持支柱38、40は、それぞれ可動取付プレート46、48に取り付けられた各カンチレバーである。可動取付プレート46、48は、駆動アセンブリ56(図4に図示)およびアクチュエータ(ステッパモータや空気シリンダなど)によって取付プレート54に連結される。駆動機構は、支持支柱38、40とそれに連結された基板支持アセンブリを、横方向において、互いに向かって移動させるか、あるいは互いから離れるように移動させる。検査ステーションに付随した真空アーム49は基板を取り上げ、基板を支持して、基板を基板搬送面から検査ステーション内の検査面へ下方に移動させる。基板支持アセンブリ34、36は、基板支持ショルダまたは凹部66を有する一対の対向プレート58、60、62、64を含んでいる。基板支持凹部66は、基板を支持するために、これらのプレートの少なくとも一部に形成されている。対向する一対の凹部66の各々は、基板の対向するエッジの周辺で基板支持体を形成する。
【0018】
図4は、一対の可動支柱38、40に取り付けられた一対の基板支持プレート58、60を示す上部基板支持アセンブリの平面図である。基板22は、その上に配置されるように示されている。可動支柱は、それぞれ可動取付プレート46、48に取り付けられており、可動取付プレート46、48は、直線ガイド76、78によってガイドピン74に連結されている。流入口80と流出口82は、空気アクチュエータ79へ流体を送り、支持支柱を三つの位置に動かす。すなわち、基板センタリング位置、基板受取り位置、または基板を通過させることができる開位置である。図4には、小さな隙間が基板のエッジと基板支持プレート58、60との間に画成されている基板受取り位置におけるバッファステーションが示されている。
【0019】
図5は、基板センタリング位置において縦に積み重ねられた配置に設置された二つの基板支持アセンブリ34、36を示す正面図である。可動取付プレート46、48は、基板センタリングのために後退した位置にある。この位置では、基板支持プレート58、60、62、64も、閉じた基板センタリング位置にある。流体が空気アクチュエータへ送られると、可動取付プレート46、48は、基板受取り位置または基板通過位置へ向かって横に移動する。
【0020】
図6は、二つの隣接した基板支持プレート60、64間の間隔を示すバッファステーションの側面図である。これらの基板支持プレート間、および支持ショルダ66の基板支持面間には十分な間隔が設けられており、ロボットブレードが離間した基板支持プレートの各対に配置された二つの基板間を通過することができ、またロボットブレードによって基板を支持ショルダ66に供給し、そこから基板を取り上げることができるようになっている。支持体38、40の厚さは、プレート間に必要な間隔を与えるような大きさにすることができる。更に、プレートも、必要な間隔を与えるような寸法にすることができる。
【0021】
動作中、基板搬送ロボットは、基板受取り位置にある上部または下部基板支持アセンブリ34、36のいずれか(本例では、上部基板支持体)に第1基板を供給する。ロボット上の垂直アクチュエータは、ロボットが上部基板支持プレート58、60上に基板を下ろすことができるようにし、空気アクチュエータは、可動取付プレート46、48を閉じて、上部プレート58、60上に支持された基板をセンタリングする。次に、ロボットは後退する。次いで、検査装置の真空アーム49が下げられ、その下端に基板が設置される。次に、基板支持プレートが開かれ、これにより、真空アーム49は、支持している基板を下方に移動して支持プレートを通過させ、検査装置に入れることができるようになる。検査プロセスが完了すると、真空アームは上部または下部基板支持アセンブリ34、36の上方に基板を移動するが、支持プレートは開いた通過位置にある。基板が所望のプレート対の上方に配置されると、基板支持アセンブリは、基板受取り位置まで閉じられる。真空アーム49が基板を支持プレートへ供給し、所望のプレート対上に支持されるべき基板を解放する。次に、ロボットは、空いている支持プレート対へ第2の基板を上記動作によって供給する。次に、ロボットは、供給ステップの順序を逆にすることにより、検査済基板を持ち上げる。検査済基板がロボット上で位置決めされ、ロボットが後退し、検査済基板をシステム内の他の場所へ移動させる。検査済基板が取り出された後、真空アーム49が新しい基板を取り上げ、その後、基板を検査装置内に移動するために用いられるシーケンスが行なわれる。
【0022】
この操作方法は、基板シャトル操作の実行を可能にする。この基板シャトル操作では、第2の基板の取り上げならびに基板支持体への移送および検査システムへの搬入が可能になる前に検査済基板を回収して配置するようにロボットに命令することなく、検査を必要とする基板が基板支持体上に配置され、検査済基板が取り出される。システム中の基板搬送(検査装置への搬入および検査装置からの搬出を含む)を制御するシステムコントローラが設置されることが好ましい。
【0023】
上、下、横、縦などの用語は相対的な用語であり、限定的なものではないことは理解されるべきである。基板を様々な向きで処理することができる他の構造も本発明の意図に含まれている。
【0024】
上記は本発明の好適な実施形態に関するものであるが、本発明の他の実施形態も本発明の基本的な範囲から逸脱することなく考案することができる。本発明の範囲は、特許請求の範囲によって定められる。
【図面の簡単な説明】
【0025】
【図1】本発明のCMPシステムの概略図である。
【図2】ポリシングステーションの概略断面図である。
【図3】二つの基板支持体を有するバッファステーションの斜視図である。
【図4】一対の可動支柱に取り付けられた一対の基板支持プレートを示す上部基板支持アセンブリの平面図である。
【図5】縦に積み重ねて取り付けられた二つの基板支持アセンブリを示す前面図である。
【図6】袋構造の二つの基板支持アセンブリを示す側面図である。
【符号の説明】
【0026】
10…システム、12…回転プラテン、14…ローディングステーション、16…研磨ヘッド、18…先端基板搬送領域、20…基板検査ステーション、21…オーバヘッド自動化装置、22…基板、23…保管槽、24…パッド、26…真空チャック、28…ポケット、30…摩擦面、32…バッファステーション、34…下部基板支持アセンブリ、38…可動支柱、46…可動取付プレート、49…真空アーム、56…駆動アセンブリ、58、60…基板支持プレート、66…基板支持凹部、74…ガイドピン、76…直線ガイド、79…空気アクチュエータ、80…流入口、82…流出口。
【特許請求の範囲】
【請求項1】
研磨装置において二枚以上の基板を監視する方法であって、
第1の方向に第1基板を移動させ、監視システムの隣りに配置されたバッファステーション内に当該第1基板を移動させるステップと、
前記第1の方向に直角な第2の方向に前記第1基板を移動させて、前記第1基板に対して監視プロセスを行うステップと、
第2基板を取り出して前記バッファステーション内に移動させるステップと、
前記第1基板を前記バッファステーションから取り出すステップと、
を備える方法。
【請求項2】
前記第2基板に対して監視プロセスを行うステップを更に備える請求項1に記載の方法。
【請求項3】
前記監視システムは、基板を検査する検査ステーションを備え、前記バッファステーションは、
第1支持プレートと、
第2支持プレートとを備え、
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている、
請求項2に記載の方法。
【請求項4】
基板を支持するロボットブレードを有するロボットを用いて、前記第2支持プレートに前記第2基板を位置決めするステップと、
前記第1支持プレートの下側の位置に前記ロボットブレードを移動させるステップと、
前記ロボットブレード上に第1基板を搬送させるステップであって、前記第1基板と第2基板とを移動させ取り出すステップが前記ロボットにより行われるステップと、
を更に備える請求項3に記載の方法。
【請求項5】
前記第1基板を移動させるステップは、前記バッファステーション内の2つの支持プレートの内の第1支持プレート上の受取り位置において、前記第1基板を受け取るステップを更に備える請求項1に記載の方法。
【請求項6】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項5に記載の方法。
【請求項7】
前記第1基板に対する監視プロセスは、前記2つの支持プレートが基板通過位置にある際に行われる請求項5に記載の方法。
【請求項8】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項7に記載の方法。
【請求項9】
前記第2基板を前記バッファステーション内に移動させるステップは、前記2つの支持プレートの内の第2支持プレート上の受取り位置において、前記第2基板を受け取るステップを更に備える請求項5に記載の方法。
【請求項10】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項9に記載の方法。
【請求項11】
研磨システムの保管ステーション、研磨ステーション及び検査ステーションの間で基板を搬送する方法であって、
第1ロボットを用いて、検査を必要としている第1基板を、前記研磨ステーションからバッファステーションへ搬送するステップと、
第2ロボットを用いて、前記第1基板を、前記バッファステーションから前記検査ステーションの第1支持プレートへ搬送するステップと、
前記第2ロボットを用いて、検査済み基板を、前記検査ステーションの第2支持プレートから前記バッファステーションへ搬送するステップと、
前記第1ロボットを用いて、検査を必要としている第2基板を、前記バッファステーションへ搬送するステップと、
前記第1ロボットを用いて、検査済み基板を、前記バッファステーションから前記研磨ステーション又は前記保管ステーションへ搬送するステップと、
を備える方法。
【請求項12】
前記第1支持プレートと前記第2支持プレートとが共通の駆動機構に連結されている請求項11に記載の方法。
【請求項13】
前記第2ロボットは、ロボット真空アームを備える請求項12に記載の方法。
【請求項14】
前記第1ロボットは第1の方向に動作可能であり、前記第2ロボットは前記第1の方向と異なる第2の方向に動作可能である請求項12に記載の方法。
【請求項15】
前記第2の方向は、前記第1の方向と直角である請求項14に記載の方法。
【請求項16】
研磨システムの保管ステーション、研磨ステーション及び検査ステーションの間で基板を搬送する方法であって、
第1の方向に動作可能なロボットを用いて、検査を必要としている第1基板を、前記研磨ステーションから、複数の基板支持アセンブリを有するバッファステーションの空いている基板支持アセンブリへ搬送し、共通の駆動機構により駆動される前記複数の基板支持アセンブリの支持プレートを用いて、前記第1基板を受取り位置で受け取るステップと、
前記第1の方向と直角な第2の方向に動作可能なロボット真空アームを用いて、前記支持プレートが基板通過位置にある際に、検査を必要としている第1基板を、前記バッファステーションから、前記検査ステーションの基板受取り位置に搬送するステップと、
前記ロボット真空アームを用いて、検査済み基板を、前記検査ステーションから、前記バッファステーションの空いている基板支持アセンブリへ搬送し、前記支持プレートを用いて、前記検査済み基板を受け取るステップと、
前記ロボットを用いて、検査を必要としている第2基板を、前記バッファステーションの他の空いている基板支持アセンブリへ搬送し、前記支持プレートを用いて、前記受取り位置において前記第2基板を受け取るステップと、
前記ロボットを用いて、前記検査済み基板を、前記バッファステーションから、前記研磨ステーション又は前記保管ステーションへ搬送するステップと、
を備える方法。
【請求項1】
研磨装置において二枚以上の基板を監視する方法であって、
第1の方向に第1基板を移動させ、監視システムの隣りに配置されたバッファステーション内に当該第1基板を移動させるステップと、
前記第1の方向に直角な第2の方向に前記第1基板を移動させて、前記第1基板に対して監視プロセスを行うステップと、
第2基板を取り出して前記バッファステーション内に移動させるステップと、
前記第1基板を前記バッファステーションから取り出すステップと、
を備える方法。
【請求項2】
前記第2基板に対して監視プロセスを行うステップを更に備える請求項1に記載の方法。
【請求項3】
前記監視システムは、基板を検査する検査ステーションを備え、前記バッファステーションは、
第1支持プレートと、
第2支持プレートとを備え、
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている、
請求項2に記載の方法。
【請求項4】
基板を支持するロボットブレードを有するロボットを用いて、前記第2支持プレートに前記第2基板を位置決めするステップと、
前記第1支持プレートの下側の位置に前記ロボットブレードを移動させるステップと、
前記ロボットブレード上に第1基板を搬送させるステップであって、前記第1基板と第2基板とを移動させ取り出すステップが前記ロボットにより行われるステップと、
を更に備える請求項3に記載の方法。
【請求項5】
前記第1基板を移動させるステップは、前記バッファステーション内の2つの支持プレートの内の第1支持プレート上の受取り位置において、前記第1基板を受け取るステップを更に備える請求項1に記載の方法。
【請求項6】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項5に記載の方法。
【請求項7】
前記第1基板に対する監視プロセスは、前記2つの支持プレートが基板通過位置にある際に行われる請求項5に記載の方法。
【請求項8】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項7に記載の方法。
【請求項9】
前記第2基板を前記バッファステーション内に移動させるステップは、前記2つの支持プレートの内の第2支持プレート上の受取り位置において、前記第2基板を受け取るステップを更に備える請求項5に記載の方法。
【請求項10】
前記第1支持プレートと前記第2支持プレートとの各々が共通の駆動機構に連結されている請求項9に記載の方法。
【請求項11】
研磨システムの保管ステーション、研磨ステーション及び検査ステーションの間で基板を搬送する方法であって、
第1ロボットを用いて、検査を必要としている第1基板を、前記研磨ステーションからバッファステーションへ搬送するステップと、
第2ロボットを用いて、前記第1基板を、前記バッファステーションから前記検査ステーションの第1支持プレートへ搬送するステップと、
前記第2ロボットを用いて、検査済み基板を、前記検査ステーションの第2支持プレートから前記バッファステーションへ搬送するステップと、
前記第1ロボットを用いて、検査を必要としている第2基板を、前記バッファステーションへ搬送するステップと、
前記第1ロボットを用いて、検査済み基板を、前記バッファステーションから前記研磨ステーション又は前記保管ステーションへ搬送するステップと、
を備える方法。
【請求項12】
前記第1支持プレートと前記第2支持プレートとが共通の駆動機構に連結されている請求項11に記載の方法。
【請求項13】
前記第2ロボットは、ロボット真空アームを備える請求項12に記載の方法。
【請求項14】
前記第1ロボットは第1の方向に動作可能であり、前記第2ロボットは前記第1の方向と異なる第2の方向に動作可能である請求項12に記載の方法。
【請求項15】
前記第2の方向は、前記第1の方向と直角である請求項14に記載の方法。
【請求項16】
研磨システムの保管ステーション、研磨ステーション及び検査ステーションの間で基板を搬送する方法であって、
第1の方向に動作可能なロボットを用いて、検査を必要としている第1基板を、前記研磨ステーションから、複数の基板支持アセンブリを有するバッファステーションの空いている基板支持アセンブリへ搬送し、共通の駆動機構により駆動される前記複数の基板支持アセンブリの支持プレートを用いて、前記第1基板を受取り位置で受け取るステップと、
前記第1の方向と直角な第2の方向に動作可能なロボット真空アームを用いて、前記支持プレートが基板通過位置にある際に、検査を必要としている第1基板を、前記バッファステーションから、前記検査ステーションの基板受取り位置に搬送するステップと、
前記ロボット真空アームを用いて、検査済み基板を、前記検査ステーションから、前記バッファステーションの空いている基板支持アセンブリへ搬送し、前記支持プレートを用いて、前記検査済み基板を受け取るステップと、
前記ロボットを用いて、検査を必要としている第2基板を、前記バッファステーションの他の空いている基板支持アセンブリへ搬送し、前記支持プレートを用いて、前記受取り位置において前記第2基板を受け取るステップと、
前記ロボットを用いて、前記検査済み基板を、前記バッファステーションから、前記研磨ステーション又は前記保管ステーションへ搬送するステップと、
を備える方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−102226(P2013−102226A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−24581(P2013−24581)
【出願日】平成25年2月12日(2013.2.12)
【分割の表示】特願2000−101559(P2000−101559)の分割
【原出願日】平成12年4月3日(2000.4.3)
【出願人】(390040660)アプライド マテリアルズ インコーポレイテッド (1,346)
【氏名又は名称原語表記】APPLIED MATERIALS,INCORPORATED
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年2月12日(2013.2.12)
【分割の表示】特願2000−101559(P2000−101559)の分割
【原出願日】平成12年4月3日(2000.4.3)
【出願人】(390040660)アプライド マテリアルズ インコーポレイテッド (1,346)
【氏名又は名称原語表記】APPLIED MATERIALS,INCORPORATED
【Fターム(参考)】
[ Back to top ]