
確認行動支援装置
【課題】外部環境情報を要することなく、簡素なシステム構成でドライバの確認行動を支援する。
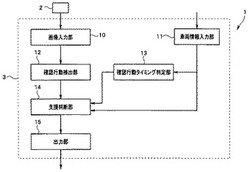
【解決手段】コントローラ3の画像入力部10にカメラ2からの撮像画像が入力され、確認行動検出部12で撮像画像を処理してドライバの確認行動を検出する。また、車両情報入力部11に車速や操舵角等の車両運転情報が入力され、この車両運転情報に基づいて、ドライバの確認行動が必要なタイミングを、確認行動タイミング判定部13で判定する。そして、支援判断部14で、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断し、必要に応じて音声等による警告や支援情報を出力部15を介して出力する。これにより、外部環境情報を要することなく簡素な構成でコスト低減を図りつつ、ドライバの確認行動を支援することができる。
【解決手段】コントローラ3の画像入力部10にカメラ2からの撮像画像が入力され、確認行動検出部12で撮像画像を処理してドライバの確認行動を検出する。また、車両情報入力部11に車速や操舵角等の車両運転情報が入力され、この車両運転情報に基づいて、ドライバの確認行動が必要なタイミングを、確認行動タイミング判定部13で判定する。そして、支援判断部14で、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断し、必要に応じて音声等による警告や支援情報を出力部15を介して出力する。これにより、外部環境情報を要することなく簡素な構成でコスト低減を図りつつ、ドライバの確認行動を支援することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の移動体を運転するドライバの確認行動を支援する確認行動支援装置に関する。
【背景技術】
【0002】
近年、自動車等の車両においては、右左折時や車線変更時のドライバの周囲の状況に対する確認動作を検出し、脇見運転や不注意等による確認ミス等を防止するための支援を行う装置が開発されている。
【0003】
例えば、特許文献1や特許文献2には、カメラによるドライバの視線や顔向きを判定してドライバの確認行動を検出すると共に、ナビゲーションシステムによる外部の走行環境を検出し、安全確認すべき状況でドライバが確認行動を怠っていた場合に警告を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−142282号公報
【特許文献2】特開2009−123182号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に開示されているような従来の技術では、ナビゲーションシステムによる位置情報や地図情報等の外部環境情報を必要とするため、システム構成が複雑化し、コスト上昇を招いてしまう。
【0006】
本発明は上記事情に鑑みてなされたもので、外部環境情報を要することなく、簡素なシステム構成でドライバの確認行動を支援することのできる確認行動支援装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明による確認行動支援装置は、移動体を運転するドライバの確認行動を支援する確認行動支援装置であって、上記移動体の運転情報に基づいて、ドライバの確認行動が必要なタイミングか否かを判定する確認行動タイミング判定部と、ドライバの確認行動を検出する確認行動検出部と、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断する支援判断部とを有し、上記確認行動が必要なタイミングから所定期間遡った期間にドライバの確認行動が検出されていなかった場合、警報の支援情報を出力し、上記確認行動が必要なタイミングまでにドライバの確認行動が検出されていた場合、奨励の支援情報を出力することを特徴とする。
【発明の効果】
【0008】
本発明によれば、外部環境情報を要することなく簡素なシステム構成としてコスト低減を図りつつ、ドライバの確認行動を支援することができる。
【図面の簡単な説明】
【0009】
【図1】確認行動支援装置の構成図
【図2】左折時の確認行動支援を示す説明図
【図3】音声出力リストの説明図
【図4】支援出力の判定区間を示す説明図
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態を説明する。
本発明による確認行動支援装置は、自動車等の移動体を運転する際に、カメラやレーダによる外界認識情報、GPSやナビゲーション装置による位置情報や地図情報等を用いることなく、自律的な情報のみでドライバの運転行動を支援するものである。ドライバに対する確認行動支援としては、周囲の状況を確認すべき場面でドライバが確認行動を怠った場合や、わき見や注意力低下等により確認すべき場面を把握できていないドライバに対して、警告を発して確認行動を促す。また、注意を怠る場合ではなく、運転スキルが低いことで確認すべき場面を正確に把握できていないドライバに対しては、適切な確認行動を行えるよう支援する。
【0011】
図1に示すように、本実施の形態においては、確認行動支援装置1は、自動車等の車両に搭載され、ドライバの顔及び周辺部位を撮像するカメラ2と、このカメラ2で撮像した画像を処理するコントローラ3とを基本として構成されている。カメラ2は、例えば、自動車の車室内のダッシュボード中央付近に運転席に向けて設置され、夜間でも使用可能なよう、近赤外カメラを用いて近赤外線LEDライト等による照射を併用している。
【0012】
コントローラ3は、マイクロコンピュータを備えて構成され、車両状態、運転操作データから確認行動のタイミングを判定すると共に、カメラ2で撮像したドライバの画像からドライバの確認行動、例えば、右左折時の前後確認や車線変更時の後方確認等を検出する。そして、確認行動タイミングの判定結果とドライバの確認行動の検出結果とからドライバに対する警告や支援の要否を判断し、必要に応じて警告や支援情報を出力する。
【0013】
このようなコントローラ3の機能は、画像入力部10、車両情報入力部11、確認行動検出部12、確認行動タイミング判定部13、支援判断部14、出力部15によって形成される。概略的には、画像入力部10にカメラ2からの撮像画像が入力され、確認行動検出部12で撮像画像を処理してドライバの確認行動を検出する。また、車両情報入力部11に車速や操舵角等の車両運転情報が入力され、この車両運転情報に基づいて、ドライバの確認行動が必要なタイミングを、確認行動タイミング判定部13で判定する。そして、支援判断部14で、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断し、必要に応じて音声等による警告や支援情報を出力部15を介して出力する。
【0014】
以下、確認行動支援装置1の各部の機能について詳細に説明する。
画像入力部10は、カメラ2で撮像したドライバの画像を所定の周期でサンプリングし、確認行動検出部12に送る。確認行動検出部12は、ドライバの画像から、周知の画像認識技術を用いて、例えば、視線の向き、目や鼻等の特徴点の動き、顔周辺の設定画像領域の動き等を検出し、ドライバの確認行動を検出する。
【0015】
同時に、車両情報入力部11は、車内ネットワーク等を介して他の車載制御装置から車速や操舵角、ウィンカ作動状態等の車両情報を入力し、確認行動タイミング判定部13に送る。確認行動タイミング判定13は、車両情報に基づいてドライバの確認行動が必要なタイミングか否かを判定する。安全確認が必要なタイミングは、車両状況を判定することで行い、基本的に、判定した地点を元に設定した区間で安全確認行動がなかった場合、音声等によってドライバに警告する。
【0016】
<車両状況の判定>
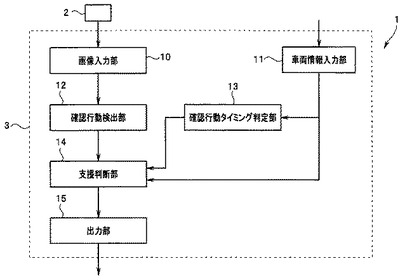
本実施の形態においては、特に、事故に繋がり易い右左折時や車線変更時等の車両進行方向の変化を伴う場面での支援を対象とするが、これらの処理は同様のロジックを基本としている。このため、以下では、図2に示すような交差点における左折時の安全確認行動への支援を例として説明する。
【0017】
(a1)左折前
自車両100が図2の交差点手前のA位置にあり、左折前である状況(以下、「車両状況A」と記載)は、自車100の減速に伴い後続車101の追突を回避するため、後方の確認が必要となる状況である。従って、左折のためのウィンカー信号を検出し、その後、下記の何れかの条件を満した場合に、自車が左折前の車両状況Aにあると判定する。以下の条件は、実走行中多くの場合には、ウィンカー操作と同時若しくは若干遅れて確認をするドライバが多いことを考慮したものである。
・ウィンカー開始時点の車速から設定比率以上(例えば20%以上)車速が低下
・ウィンカー開始時点からの走行距離が所定距離Da以上(例えば10m以上)
・ウィンカー開始時点からの経過時間が、停止時を除いて設定時間Ta以上(例えば2秒以上)
【0018】
(b1)左折開始時
自車100が図2のB位置で交差点で左折を開始する状況(以下、「車両状況B」と記載)は、右折対向車102との衝突防止のための確認に加え、特に左後方からの自転車103やオートバイ104等との衝突を回避するため、巻き込みの確認が必要になる状況である。従って、ウィンカー信号を検出し、その後、下記の何れかの条件を満した場合、自車が左折開始時の車両状況Bにあると判定する。
・舵角が設定角度θb以下(例えば、−20deg以下)
・舵角速度が設定速度以上(例えば−60deg/sec以上)で舵角が設定角度以下(例えば−10deg以下)
【0019】
(c1)左折中
自車100が図2のC位置で左折中である状況(以下、「車両状況C」と記載)は、横断歩道を横断する右側の横断者105や左側の横断者106等との接触を回避するため、左右の確認が必要になる状況である。従って、ウィンカー信号を検出し、その後、下記の条件を満した場合、自車が左折中の車両状況Cにあると判定する。
・左折合図開始後からの車両のヨー角が設定角度以上(例えば−30deg以上)
【0020】
この場合、ヨー角は、車両モデルと、車速、舵角から算出することができるが、本実施の形態においては、計算コストを考慮して、近似的に車速と舵角との積を左折合図開始(ウィンカー開始)後から累積してヨー角を算出する。通常、モデルから累積してヨー角を算出する場合には累積誤差が問題になるが、ウィンカー開始時からの累積とすることで、長時間の累積誤差の影響を低減することができる。
【0021】
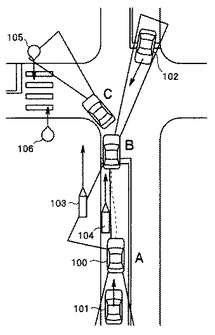
次に、支援判断部14では、上述のA,B,Cの各車両状況の判定タイミングで、それ以前のドライバの確認行動を調べ、警報を含む支援の要否を判断する。各車両状況判定タイミングでドライバの確認行動が検出されなかった場合、出力部15を介してドライバに警報を出力する。本実施の形態においては、警報は、音声による警報として、図3に示すようなリストから注意喚起の発話語を選択する。
【0022】
<警報出力>
図3は、A,B,Cの各車両状況の判定タイミングを、音声出力位置として、各位置における確認内容と、対応する注意喚起の音声出力を示すものである。図3中において、音声出力位置B1,B2は、左折開始時の車両状況Bにおいて、それぞれ、左後方の2輪車等に対する巻き込み確認、前方の右折対向車等に対する確認を示している。
【0023】
各注意喚起の判定は並列で行うが、車両状況A→B→Cの順に優先度を高く設定する。また、或る発話での音声出力中に高優先度の注意喚起・警報の判定が行われた場合には、発話中の音声を打ち切り、高優先度の警報発話を出力する。具体的には、A,B,Cの各車両状況に対して、以下の条件でドライバの確認行動の有無を判定し、図4に示すような警報出力判定区間で確認行動が検出されなかった場合、図3の該当する注意喚起の発話語を音声出力する。
【0024】
(a2)左折前
判定期間:車両状況A判定のT1秒(例えばT=3)前まで
確認行動検出条件(後方確認):警報判定期間内にT2秒(例えばT2=0.5)以上、ルームミラー、左右ミラー、左後ろの何れかを確認
【0025】
(b2)左折開始時
判定期間:車両状況B判定のT1秒(例えばT=3)前まで若しくはその時点より設定距離D1(例えば5m)だけ前の位置にいた時刻とのうち短い方の期間
確認行動検出条件
巻き込み確認:期間内にT2秒(例えばT2=0.5)以上、左、左後、左ミラー
の何れかを確認
前方確認 :期間内にT2秒(例えばT2=0.5)以上、前、右の何れかに顔を向ける。
【0026】
(c2)左折中
判定期間:車両状況C判定のT1秒(例えばT=3)前まで若しくはその時点より設定距離D1(例えば5m)だけ前にいた時刻とのうち短い方の期間
確認行動検出条件(左右確認):期間内に0.5sec以上、左、左後の何れかと前若しくは右を確認
【0027】
<警報タイミングの可変化>
車両状況の判定、警報の判定では、幾つかのパラメータがある。これらのパラメータは、設定によっては、或るドライバでは警報が早すぎると感じる場合もあれば、別のドライバでは、もっと早く警報(注意喚起)してほしいと感じる場合もある。そこで、以下の(1),(2)に示すように、個々のドライバの過去の運転履歴より、これらのパラメータを調整する。
【0028】
(1)確認行動ベースの記憶
ウィンカーON期間内の確認行動それぞれに対して、以下の情報を保存する。
・車速、ヨー角、舵角、舵角速度
・ウィンカー開始後からの時間差・距離・ウィンカー時との車速の差
・A,B,Cの車両状況判定タイミングとの時間差・距離(車速の累積により算出)
【0029】
(2)警報の調整
車両状況判定のパラメータ、警報の判定区間を調整することにより、警報のタイミングを可変する。充分データがたまったら(例えば100程度)、A,B,C位置の警報対象の確認行動毎に保存したデータを集計し、警報判定の範囲内か否かを確認する。その結果、範囲内に入っていないデータが一定数(例えば30)以上ある場合には、各パラメータを動かし、一番多くのデータが入るパラメータを探索する(但し、各パラメータの可変範囲の制限はある)。
【0030】
尚、上述の説明は、比較的警報が遅くなる設定の場合であり、ドライバが確認しようと思っていたが先に警報されたという場合を少なくする設定である。実際に、パラメータを調整する場合は、先に示した数値より厳しめの数値(警報が早くなる、出やすくなる数値)を初期値とする。
【0031】
<奨励としての支援出力>
初心者ドライバ等では、どのタイミングで安全確認をすべきか良くわからないという場合も存在すると考えられる。そこで、警報とは逆に、安全確認行動をとるべき場面で確認した場合にも、奨励としての支援情報出力(例えば、TVゲーム等で得点を得たときの効果音出力等)を行う。
【0032】
上述したように、警報を出力する場合、車両状況に基づく警報タイミングを判定し、その時点から遡った過去のある範囲(例えば3秒前まで等)にドライバの確認行動が検出されたか否かの確認を行う。一方、奨励としての支援出力においては、ドライバが確認行動を行った時点で出力を行う。そのため、奨励としての支援出力では、常時、確認行動をすべき範囲にいるか否かを判定しなければならない。
【0033】
しかしながら、左折前については、ウィンカー操作以前のドライバの左折意思を精度よく推定することは困難である。従って、本実施の形態においては、左折開始時、左折中について、それぞれ、以下の区間でドライバの確認行動を検出したとき、奨励としての支援出力を行う。
【0034】
但し、ドライバが確認行動をとり、奨励出力を行った後に、警報安全確認判定区間の開始が来た場合、「奨励」したあとに「警報」の出力条件が成立する場合もあり得る。よって、各車両状況のうち、例えばBの車両状況において奨励したあとは、同じ区間のBにおいては、例え警報出力の条件に合致した場合であっても警報の出力をキャンセルする。
【0035】
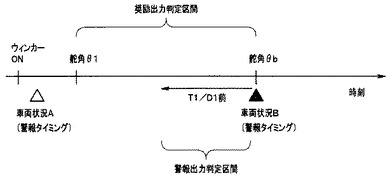
(左折開始時の奨励としての支援出力)
図4に示すように、以下の2条件を満たした時点から左折開始時の車両状況B判定までにドライバの確認行動を検出したとき、奨励としての支援出力を行う。
・車両状況A判定(左折前)以後
・舵角が設定角度θ1以下(例えば0deg以下)若しくは舵角速度が設定速度以上(例えば20deg/sec以上)で舵角が設定角度以下(例えば−10deg以下)
【0036】
(左折中の奨励としての支援出力)
以下の2条件を満たした時点から左折中の車両状況C判定までにドライバの確認行動を検出したとき、奨励としての支援出力を行う。
・車両状況A判定(左折前)以後
・ウィンカー合図開始後からの車両のヨー角が設定角度(例えば−5deg)以上
【0037】
このように本実施の形態においては、GPSやナビゲーション装置による位置情報や地図情報等の外部環境情報を用いることなく、運転情報のみからドライバが確認すべき状況を判定するので、簡素な構成でコスト低減を図りつつ、ドライバが確認行動を怠っていたり、確認すべき場面を把握できていないときに警報を出してドライバの確認行動を促すことができる。
【0038】
また、どのタイミングで安全確認をすべきか良くわからないというドライバに対しては、警報とは逆に、安全確認行動をとるべき場面で確認した場合に奨励としての支援情報を出力するので、ドライバが確認すべきタイミングを効果的に学習することが可能となる。
【符号の説明】
【0039】
1 確認行動支援装置
2 カメラ
3 コントローラ
10 画像入力部
11 車両情報入力部
12 確認行動検出部
13 確認行動タイミング判定部
14 支援判断部
15 出力部
【技術分野】
【0001】
本発明は、自動車等の移動体を運転するドライバの確認行動を支援する確認行動支援装置に関する。
【背景技術】
【0002】
近年、自動車等の車両においては、右左折時や車線変更時のドライバの周囲の状況に対する確認動作を検出し、脇見運転や不注意等による確認ミス等を防止するための支援を行う装置が開発されている。
【0003】
例えば、特許文献1や特許文献2には、カメラによるドライバの視線や顔向きを判定してドライバの確認行動を検出すると共に、ナビゲーションシステムによる外部の走行環境を検出し、安全確認すべき状況でドライバが確認行動を怠っていた場合に警告を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−142282号公報
【特許文献2】特開2009−123182号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に開示されているような従来の技術では、ナビゲーションシステムによる位置情報や地図情報等の外部環境情報を必要とするため、システム構成が複雑化し、コスト上昇を招いてしまう。
【0006】
本発明は上記事情に鑑みてなされたもので、外部環境情報を要することなく、簡素なシステム構成でドライバの確認行動を支援することのできる確認行動支援装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明による確認行動支援装置は、移動体を運転するドライバの確認行動を支援する確認行動支援装置であって、上記移動体の運転情報に基づいて、ドライバの確認行動が必要なタイミングか否かを判定する確認行動タイミング判定部と、ドライバの確認行動を検出する確認行動検出部と、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断する支援判断部とを有し、上記確認行動が必要なタイミングから所定期間遡った期間にドライバの確認行動が検出されていなかった場合、警報の支援情報を出力し、上記確認行動が必要なタイミングまでにドライバの確認行動が検出されていた場合、奨励の支援情報を出力することを特徴とする。
【発明の効果】
【0008】
本発明によれば、外部環境情報を要することなく簡素なシステム構成としてコスト低減を図りつつ、ドライバの確認行動を支援することができる。
【図面の簡単な説明】
【0009】
【図1】確認行動支援装置の構成図
【図2】左折時の確認行動支援を示す説明図
【図3】音声出力リストの説明図
【図4】支援出力の判定区間を示す説明図
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態を説明する。
本発明による確認行動支援装置は、自動車等の移動体を運転する際に、カメラやレーダによる外界認識情報、GPSやナビゲーション装置による位置情報や地図情報等を用いることなく、自律的な情報のみでドライバの運転行動を支援するものである。ドライバに対する確認行動支援としては、周囲の状況を確認すべき場面でドライバが確認行動を怠った場合や、わき見や注意力低下等により確認すべき場面を把握できていないドライバに対して、警告を発して確認行動を促す。また、注意を怠る場合ではなく、運転スキルが低いことで確認すべき場面を正確に把握できていないドライバに対しては、適切な確認行動を行えるよう支援する。
【0011】
図1に示すように、本実施の形態においては、確認行動支援装置1は、自動車等の車両に搭載され、ドライバの顔及び周辺部位を撮像するカメラ2と、このカメラ2で撮像した画像を処理するコントローラ3とを基本として構成されている。カメラ2は、例えば、自動車の車室内のダッシュボード中央付近に運転席に向けて設置され、夜間でも使用可能なよう、近赤外カメラを用いて近赤外線LEDライト等による照射を併用している。
【0012】
コントローラ3は、マイクロコンピュータを備えて構成され、車両状態、運転操作データから確認行動のタイミングを判定すると共に、カメラ2で撮像したドライバの画像からドライバの確認行動、例えば、右左折時の前後確認や車線変更時の後方確認等を検出する。そして、確認行動タイミングの判定結果とドライバの確認行動の検出結果とからドライバに対する警告や支援の要否を判断し、必要に応じて警告や支援情報を出力する。
【0013】
このようなコントローラ3の機能は、画像入力部10、車両情報入力部11、確認行動検出部12、確認行動タイミング判定部13、支援判断部14、出力部15によって形成される。概略的には、画像入力部10にカメラ2からの撮像画像が入力され、確認行動検出部12で撮像画像を処理してドライバの確認行動を検出する。また、車両情報入力部11に車速や操舵角等の車両運転情報が入力され、この車両運転情報に基づいて、ドライバの確認行動が必要なタイミングを、確認行動タイミング判定部13で判定する。そして、支援判断部14で、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断し、必要に応じて音声等による警告や支援情報を出力部15を介して出力する。
【0014】
以下、確認行動支援装置1の各部の機能について詳細に説明する。
画像入力部10は、カメラ2で撮像したドライバの画像を所定の周期でサンプリングし、確認行動検出部12に送る。確認行動検出部12は、ドライバの画像から、周知の画像認識技術を用いて、例えば、視線の向き、目や鼻等の特徴点の動き、顔周辺の設定画像領域の動き等を検出し、ドライバの確認行動を検出する。
【0015】
同時に、車両情報入力部11は、車内ネットワーク等を介して他の車載制御装置から車速や操舵角、ウィンカ作動状態等の車両情報を入力し、確認行動タイミング判定部13に送る。確認行動タイミング判定13は、車両情報に基づいてドライバの確認行動が必要なタイミングか否かを判定する。安全確認が必要なタイミングは、車両状況を判定することで行い、基本的に、判定した地点を元に設定した区間で安全確認行動がなかった場合、音声等によってドライバに警告する。
【0016】
<車両状況の判定>
本実施の形態においては、特に、事故に繋がり易い右左折時や車線変更時等の車両進行方向の変化を伴う場面での支援を対象とするが、これらの処理は同様のロジックを基本としている。このため、以下では、図2に示すような交差点における左折時の安全確認行動への支援を例として説明する。
【0017】
(a1)左折前
自車両100が図2の交差点手前のA位置にあり、左折前である状況(以下、「車両状況A」と記載)は、自車100の減速に伴い後続車101の追突を回避するため、後方の確認が必要となる状況である。従って、左折のためのウィンカー信号を検出し、その後、下記の何れかの条件を満した場合に、自車が左折前の車両状況Aにあると判定する。以下の条件は、実走行中多くの場合には、ウィンカー操作と同時若しくは若干遅れて確認をするドライバが多いことを考慮したものである。
・ウィンカー開始時点の車速から設定比率以上(例えば20%以上)車速が低下
・ウィンカー開始時点からの走行距離が所定距離Da以上(例えば10m以上)
・ウィンカー開始時点からの経過時間が、停止時を除いて設定時間Ta以上(例えば2秒以上)
【0018】
(b1)左折開始時
自車100が図2のB位置で交差点で左折を開始する状況(以下、「車両状況B」と記載)は、右折対向車102との衝突防止のための確認に加え、特に左後方からの自転車103やオートバイ104等との衝突を回避するため、巻き込みの確認が必要になる状況である。従って、ウィンカー信号を検出し、その後、下記の何れかの条件を満した場合、自車が左折開始時の車両状況Bにあると判定する。
・舵角が設定角度θb以下(例えば、−20deg以下)
・舵角速度が設定速度以上(例えば−60deg/sec以上)で舵角が設定角度以下(例えば−10deg以下)
【0019】
(c1)左折中
自車100が図2のC位置で左折中である状況(以下、「車両状況C」と記載)は、横断歩道を横断する右側の横断者105や左側の横断者106等との接触を回避するため、左右の確認が必要になる状況である。従って、ウィンカー信号を検出し、その後、下記の条件を満した場合、自車が左折中の車両状況Cにあると判定する。
・左折合図開始後からの車両のヨー角が設定角度以上(例えば−30deg以上)
【0020】
この場合、ヨー角は、車両モデルと、車速、舵角から算出することができるが、本実施の形態においては、計算コストを考慮して、近似的に車速と舵角との積を左折合図開始(ウィンカー開始)後から累積してヨー角を算出する。通常、モデルから累積してヨー角を算出する場合には累積誤差が問題になるが、ウィンカー開始時からの累積とすることで、長時間の累積誤差の影響を低減することができる。
【0021】
次に、支援判断部14では、上述のA,B,Cの各車両状況の判定タイミングで、それ以前のドライバの確認行動を調べ、警報を含む支援の要否を判断する。各車両状況判定タイミングでドライバの確認行動が検出されなかった場合、出力部15を介してドライバに警報を出力する。本実施の形態においては、警報は、音声による警報として、図3に示すようなリストから注意喚起の発話語を選択する。
【0022】
<警報出力>
図3は、A,B,Cの各車両状況の判定タイミングを、音声出力位置として、各位置における確認内容と、対応する注意喚起の音声出力を示すものである。図3中において、音声出力位置B1,B2は、左折開始時の車両状況Bにおいて、それぞれ、左後方の2輪車等に対する巻き込み確認、前方の右折対向車等に対する確認を示している。
【0023】
各注意喚起の判定は並列で行うが、車両状況A→B→Cの順に優先度を高く設定する。また、或る発話での音声出力中に高優先度の注意喚起・警報の判定が行われた場合には、発話中の音声を打ち切り、高優先度の警報発話を出力する。具体的には、A,B,Cの各車両状況に対して、以下の条件でドライバの確認行動の有無を判定し、図4に示すような警報出力判定区間で確認行動が検出されなかった場合、図3の該当する注意喚起の発話語を音声出力する。
【0024】
(a2)左折前
判定期間:車両状況A判定のT1秒(例えばT=3)前まで
確認行動検出条件(後方確認):警報判定期間内にT2秒(例えばT2=0.5)以上、ルームミラー、左右ミラー、左後ろの何れかを確認
【0025】
(b2)左折開始時
判定期間:車両状況B判定のT1秒(例えばT=3)前まで若しくはその時点より設定距離D1(例えば5m)だけ前の位置にいた時刻とのうち短い方の期間
確認行動検出条件
巻き込み確認:期間内にT2秒(例えばT2=0.5)以上、左、左後、左ミラー
の何れかを確認
前方確認 :期間内にT2秒(例えばT2=0.5)以上、前、右の何れかに顔を向ける。
【0026】
(c2)左折中
判定期間:車両状況C判定のT1秒(例えばT=3)前まで若しくはその時点より設定距離D1(例えば5m)だけ前にいた時刻とのうち短い方の期間
確認行動検出条件(左右確認):期間内に0.5sec以上、左、左後の何れかと前若しくは右を確認
【0027】
<警報タイミングの可変化>
車両状況の判定、警報の判定では、幾つかのパラメータがある。これらのパラメータは、設定によっては、或るドライバでは警報が早すぎると感じる場合もあれば、別のドライバでは、もっと早く警報(注意喚起)してほしいと感じる場合もある。そこで、以下の(1),(2)に示すように、個々のドライバの過去の運転履歴より、これらのパラメータを調整する。
【0028】
(1)確認行動ベースの記憶
ウィンカーON期間内の確認行動それぞれに対して、以下の情報を保存する。
・車速、ヨー角、舵角、舵角速度
・ウィンカー開始後からの時間差・距離・ウィンカー時との車速の差
・A,B,Cの車両状況判定タイミングとの時間差・距離(車速の累積により算出)
【0029】
(2)警報の調整
車両状況判定のパラメータ、警報の判定区間を調整することにより、警報のタイミングを可変する。充分データがたまったら(例えば100程度)、A,B,C位置の警報対象の確認行動毎に保存したデータを集計し、警報判定の範囲内か否かを確認する。その結果、範囲内に入っていないデータが一定数(例えば30)以上ある場合には、各パラメータを動かし、一番多くのデータが入るパラメータを探索する(但し、各パラメータの可変範囲の制限はある)。
【0030】
尚、上述の説明は、比較的警報が遅くなる設定の場合であり、ドライバが確認しようと思っていたが先に警報されたという場合を少なくする設定である。実際に、パラメータを調整する場合は、先に示した数値より厳しめの数値(警報が早くなる、出やすくなる数値)を初期値とする。
【0031】
<奨励としての支援出力>
初心者ドライバ等では、どのタイミングで安全確認をすべきか良くわからないという場合も存在すると考えられる。そこで、警報とは逆に、安全確認行動をとるべき場面で確認した場合にも、奨励としての支援情報出力(例えば、TVゲーム等で得点を得たときの効果音出力等)を行う。
【0032】
上述したように、警報を出力する場合、車両状況に基づく警報タイミングを判定し、その時点から遡った過去のある範囲(例えば3秒前まで等)にドライバの確認行動が検出されたか否かの確認を行う。一方、奨励としての支援出力においては、ドライバが確認行動を行った時点で出力を行う。そのため、奨励としての支援出力では、常時、確認行動をすべき範囲にいるか否かを判定しなければならない。
【0033】
しかしながら、左折前については、ウィンカー操作以前のドライバの左折意思を精度よく推定することは困難である。従って、本実施の形態においては、左折開始時、左折中について、それぞれ、以下の区間でドライバの確認行動を検出したとき、奨励としての支援出力を行う。
【0034】
但し、ドライバが確認行動をとり、奨励出力を行った後に、警報安全確認判定区間の開始が来た場合、「奨励」したあとに「警報」の出力条件が成立する場合もあり得る。よって、各車両状況のうち、例えばBの車両状況において奨励したあとは、同じ区間のBにおいては、例え警報出力の条件に合致した場合であっても警報の出力をキャンセルする。
【0035】
(左折開始時の奨励としての支援出力)
図4に示すように、以下の2条件を満たした時点から左折開始時の車両状況B判定までにドライバの確認行動を検出したとき、奨励としての支援出力を行う。
・車両状況A判定(左折前)以後
・舵角が設定角度θ1以下(例えば0deg以下)若しくは舵角速度が設定速度以上(例えば20deg/sec以上)で舵角が設定角度以下(例えば−10deg以下)
【0036】
(左折中の奨励としての支援出力)
以下の2条件を満たした時点から左折中の車両状況C判定までにドライバの確認行動を検出したとき、奨励としての支援出力を行う。
・車両状況A判定(左折前)以後
・ウィンカー合図開始後からの車両のヨー角が設定角度(例えば−5deg)以上
【0037】
このように本実施の形態においては、GPSやナビゲーション装置による位置情報や地図情報等の外部環境情報を用いることなく、運転情報のみからドライバが確認すべき状況を判定するので、簡素な構成でコスト低減を図りつつ、ドライバが確認行動を怠っていたり、確認すべき場面を把握できていないときに警報を出してドライバの確認行動を促すことができる。
【0038】
また、どのタイミングで安全確認をすべきか良くわからないというドライバに対しては、警報とは逆に、安全確認行動をとるべき場面で確認した場合に奨励としての支援情報を出力するので、ドライバが確認すべきタイミングを効果的に学習することが可能となる。
【符号の説明】
【0039】
1 確認行動支援装置
2 カメラ
3 コントローラ
10 画像入力部
11 車両情報入力部
12 確認行動検出部
13 確認行動タイミング判定部
14 支援判断部
15 出力部
【特許請求の範囲】
【請求項1】
移動体を運転するドライバの確認行動を支援する確認行動支援装置であって、
上記移動体の運転情報に基づいて、ドライバの確認行動が必要なタイミングか否かを判定する確認行動タイミング判定部と、
ドライバの確認行動を検出する確認行動検出部と、
確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断する支援判断部とを有し、
上記確認行動が必要なタイミングから所定期間遡った期間にドライバの確認行動が検出されていなかった場合、警報の支援情報を出力し、上記確認行動が必要なタイミングまでにドライバの確認行動が検出されていた場合、奨励の支援情報を出力することを特徴とする確認行動支援装置。
【請求項2】
上記確認行動の検出時の運転状態を記憶し、記憶した複数の過去事例から上記確認行動の検出タイミングを制御することを特徴とする請求項1記載の確認行動支援装置。
【請求項3】
所定の区間で上記奨励の支援情報を出力した後は、同じ区間で上記警報の支援情報の出力条件を満たした場合であっても上記警報の支援情報の出力をキャンセルすることを特徴とする請求項1又は2記載の確認行動支援装置。
【請求項1】
移動体を運転するドライバの確認行動を支援する確認行動支援装置であって、
上記移動体の運転情報に基づいて、ドライバの確認行動が必要なタイミングか否かを判定する確認行動タイミング判定部と、
ドライバの確認行動を検出する確認行動検出部と、
確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断する支援判断部とを有し、
上記確認行動が必要なタイミングから所定期間遡った期間にドライバの確認行動が検出されていなかった場合、警報の支援情報を出力し、上記確認行動が必要なタイミングまでにドライバの確認行動が検出されていた場合、奨励の支援情報を出力することを特徴とする確認行動支援装置。
【請求項2】
上記確認行動の検出時の運転状態を記憶し、記憶した複数の過去事例から上記確認行動の検出タイミングを制御することを特徴とする請求項1記載の確認行動支援装置。
【請求項3】
所定の区間で上記奨励の支援情報を出力した後は、同じ区間で上記警報の支援情報の出力条件を満たした場合であっても上記警報の支援情報の出力をキャンセルすることを特徴とする請求項1又は2記載の確認行動支援装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−159217(P2011−159217A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−22257(P2010−22257)
【出願日】平成22年2月3日(2010.2.3)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年2月3日(2010.2.3)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]