
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体に関する。
【背景技術】
【0002】
室内環境で端末の位置を測定する方法として、無線LAN(Wireless LAN:Wi−Fi)信号を用いる方式、慣性センサ(Inertial Measurement Unit:IMU)を用いる方式、超音波発生器(Sonar)を用いる方式、超広帯域信号(Ultra−Wideband:UWB)を用いる方式、赤外線信号(Infrared signal)を用いる方式などがある。しかし、無線LAN信号を用いる方式は正確度が非常に低く、慣性センサを用いる方式は独立的に用いることはできない。また、超音波信号、超広帯域信号、及び赤外線信号を用いる方式は、室内インフラ(infrastructure)を設置しなければならないという問題があり、高い費用を避けることができない。
【0003】
また、端末は、ユーザが移動する際に同じ建物であっても異なる階を移動することがあるため、それぞれ異なる階における正確な位置を把握することが必要である。
【0004】
従って、追加的なインフラを必要とせずに端末の位置をより正確に測定できる方法及び装置が求められている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の問題点に鑑みてなされたものであって、本発明の目的は、追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するためになされた本発明の一態様による磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の位置を測定するステップと、を有する。
【0007】
前記第1センサは、磁場情報を検出する磁場センサであり、前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであり得る。
前記端末の位置を測定するステップは、前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工するステップと、前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定するステップと、を含み得る。
前記記第1情報及び第2情報を加工するステップは、前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せるステップと、前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離するステップと、を含み得る。
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含み得る。
また、前記端末の位置を測定するステップは、前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握するステップと、前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含んでもよい。
また、前記端末の位置を測定するステップは、前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正するステップと、前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含んでもよい。
また、前記端末の位置を測定するステップは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定するステップを更に含み得る。
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含み得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、特定基準点を基準とする座標形態で格納され、各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納され得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、絵で表示される地図上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向として格納され得る。
また、前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含み得る。
前記磁場を利用した端末の位置測定方法は、前記端末が位置する領域に対する磁場マップを要求するステップを更に含んでもよい。
また、前記磁場を利用した端末の位置測定方法は、前記第2センサに対する利用有無の選択を受信するステップを更に含んでもよい。
【0008】
上記目的を達成するためになされた本発明の一態様による磁場を利用した端末の位置測定装置は、端末が位置する領域の磁場マップを受信する受信モジュールと、前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する取得モジュールと、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報から取得したセンサ値に基づいて前記端末の位置を測定する測定モジュールと、を備える。
【0009】
前記第1センサは、磁場情報を検出する磁場センサであり、前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであり得る。
前記測定モジュールは、前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工する加工部と、前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定する第1測定部と、を含み得る。
前記加工部は、前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せる組合せ手段と、前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離する分離手段と、を含み得る。
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含み得る。
また、前記測定モジュールは、前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握する把握部と、前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定する第2測定部と、を含んでもよい。
また、前記測定モジュールは、前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正する補正部と、前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定する第3測定部と、を含んでもよい。
また、前記測定モジュールは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定する方向測定部を更に含み得る。
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含み得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、特定基準点を基準とする座標形態で格納され、各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納され得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、絵で表示される地図上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向として格納され得る。
また、前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含み得る。
前記磁場を利用した端末の位置測定装置は、前記端末が位置する領域に対する磁場マップを要求する要求部を更に含んでもよい。
【発明の効果】
【0010】
本発明によれば、端末に含まれるセンサを用いることによって追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる。
また、端末に含まれる磁場センサ及び複数のセンサのセンサ値を共に利用することによって端末周辺に関する情報提供や歩行者ナビゲーションのためのより精密な位置情報サービス(Location Based Services:LBS)を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【図2】本発明の他の実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【図3】図1に示した端末の位置を測定する方法(ステップS111)の一例を示すフローチャートである。
【図4】図1に示した端末の位置を測定する方法(ステップS111)の他の例を示すフローチャートである。
【図5】図1に示した端末の位置を測定する方法(ステップS111)の更に他の例を示すフローチャートである。
【図6】磁場マップの例示的な図である。
【図7】本発明の一実施形態による磁場マップ格納部を示す図である。
【図8】本発明の他の実施形態による磁場マップ格納部を示す図である。
【図9】本発明の一実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【図10】本発明の他の実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【図11】図9の磁場を利用した端末の位置測定装置を含む端末の一例を示すブロック図である。
【図12】図9の磁場を利用した端末の位置測定装置を含む端末の他の例を示すブロック図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態の具体例を、図面を参照しながら詳細に説明する。しかし、本発明が実施形態によって制限されたり限定されたりすることはない。また、各図面に提示した同一の参照符号は同一の部材を示す。
【0013】
図1は、本発明の一実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【0014】
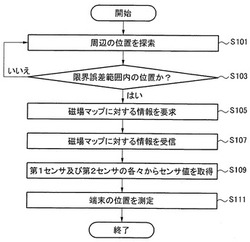
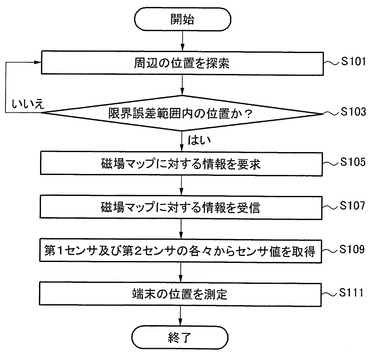
磁場を利用した端末の位置測定装置(以下、単に「位置測定装置」とも称する。)は、端末が位置する領域の周辺の位置を探索し(ステップS101)、該当領域の位置が限界誤差範囲内の位置であるか否かを判断する(ステップS103)。
【0015】
ステップS103の判断の結果、該当領域の位置が限界誤差範囲内の位置である場合、位置測定装置は、端末が位置する領域に対する磁場マップを要求する(ステップS105)。
【0016】
ここで、位置測定装置は、磁場マップが格納された磁場マップ格納部に、端末が位置する領域を含む区域の名前、アドレス、緯度又は経度の範囲などの形態で磁場マップを要求する。即ち、位置測定装置は、例えば、OO−XX番地、YYビル、或いはZZ区域などの形態で、端末が位置する領域の磁場マップを要求する。位置測定装置は、この他にも磁場マップで端末が位置する領域を示すことができる様々な方法を用いて磁場マップを要求してもよい。
【0017】
ステップS103の判断の結果、端末が位置する該当領域の位置が限界誤差範囲外の位置である場合、位置測定装置は、再びステップS101に戻って周辺の位置探索を継続する。
【0018】
位置測定装置は、磁場マップ格納部から端末が位置する領域の磁場マップを受信する(ステップS107)。磁場マップ格納部は、位置測定装置の内部に位置してもよく、位置測定装置を含む端末の内部又は外部に位置してもよい。磁場マップ格納部が端末の外部に位置する場合、位置測定装置は、端末のセルラー通信、ワイファイ(WiFi)又はその他の通信機能を介して磁場マップ格納部に格納された情報を受信する。
【0019】
磁場マップ格納部、及び磁場マップ格納部が格納する磁場マップは、後述する図7及び図8を参照して詳細に説明する。
【0020】
位置測定装置は、端末に含まれるそれぞれ異なる第1センサ及び第2センサの各々からセンサ値を受信する(ステップS109)。ここで、第1センサは磁場情報を検出する磁場センサであり、第2センサは加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つである。従って、第1センサによって検出された第1情報のセンサ値は磁場情報であり、第2センサから取得した第2情報のセンサ値は加速度情報、慣性情報、ジャイロセンサ情報、圧力情報、及び超音波情報のうちのいずれか1つである。
【0021】
位置測定装置は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定する(ステップS111)。ここで、位置測定装置は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を加工し、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握した後、その結果を磁場マップにマッチングして端末の位置を測定する。位置測定装置が端末の位置を測定する具体的な方法は、後述する図3〜図5を参照して詳細に説明する。
【0022】
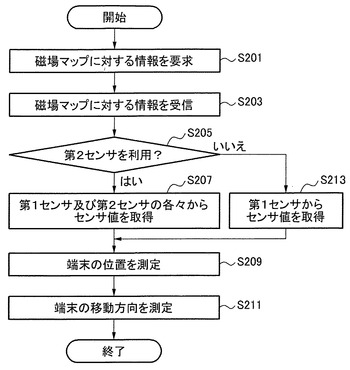
図2は、本発明の他の実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【0023】
位置測定装置は、磁場マップ格納部又はその他の磁場マップを格納する装置に、端末が位置する領域に対する磁場マップを要求する(ステップS201)。
【0024】
位置測定装置は、これに対する応答として、端末が位置する領域の磁場マップを受信する(ステップS203)。
【0025】
ここで、位置測定装置が受信する磁場マップは、端末が位置する該当領域、該当領域を含む該当地域、該当地域に含まれる建物、及び建物に含まれる区域に対する磁場マップを含む。また、磁場マップは、該当領域、該当地域、建物、区域の各々に対する磁場の大きさ、3軸(x、y、z軸)に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうち少なくとも1つを含む。
【0026】
位置測定装置は、端末ユーザから第2センサの利用の有無に対する選択の入力を受ける(ステップS205)。ここで、位置測定装置は、端末ユーザに第2センサを用いるか否かを直接問い合わせ、別のモード設定又はスイッチのオン/オフ設定によって第2センサの利用の有無に対する選択の入力を受けてもよい。
【0027】
ステップS205において、端末ユーザから第2センサの利用の有無に対する選択を受けた場合、位置測定装置は、端末に含まれるそれぞれ異なる第1センサ及び第2センサの各々から検出された値を受信する(ステップS207)。
【0028】
位置測定装置は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報を用いて端末の位置を測定する(ステップS209)。また、位置測定装置は、磁場マップと、第1センサ及び第2センサの各々から検出された第1情報及び第2情報を用いて端末の移動方向も測定する(ステップS211)。
【0029】
一方、ステップS205において、端末ユーザから第2センサの利用の有無に対する選択を受けなかった場合、位置測定装置は、第2センサを除く第1センサからのみセンサ値を取得する(ステップS213)。この場合、ステップS209では、第1センサによって検出された第1情報(即ち、磁場情報)及び磁場マップだけを用いて端末の位置を測定することになる。また、ステップS211においても、第1センサによって検出された第1情報(即ち、磁場情報)及び磁場マップだけを用いて端末の移動方向を測定することになる。
【0030】
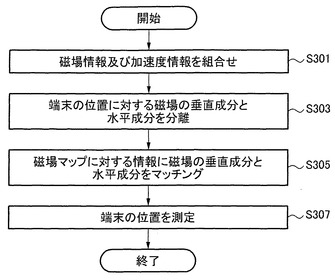
図3は、図1に示した端末の位置を測定する方法(ステップS111)の一例を示すフローチャートである。図3では、第1センサで磁場センサを用い、第2センサで加速度センサを利用した場合に、角度センサ値を用いて端末の位置を測定する方法を示す。
【0031】
端末の位置を測定する前に、位置測定装置は、ステップS109を介して第1センサ及び第2センサの各々からセンサ値を取得する。
【0032】
位置測定装置が第1センサの磁場センサから取得した磁場情報は、下の数式(1)のように磁場ベクトル(m)で表すことができる。
【0033】
【数1】

【0034】
ここで、mx、my、mzは、各々特定基準点(m)を基準軸とする磁場ベクトル(m)のx成分値、y成分値、及びz成分値を示す。
【0035】
また、位置測定装置が第2センサの加速度センサから取得した加速度情報は、下の数式(2)のように重力ベクトル(g)で表すことができる。ここで、加速度情報は、端末に含まれる加速度センサが停止状態の端末に対して測定した重力ベクトル(g)である。
【0036】
【数2】
【0037】
ここで、gx、gy、gzは、重力ベクトル(g)のx成分値、y成分値、及びz成分値を示し、|g|=1は、gx、gy、gzのノルム(norm)値、即ち重力ベクトル(g)の大きさが「1」で一定であることを示す。
【0038】
数式(2)の加速度情報は、加速度センサから取得したセンサ値にジャイロセンサから取得したセンサ値(即ち、ジャイロセンサ情報)などを追加して更に精密に補完した値であってもよい。
【0039】
角度センサ値を用いて端末の位置を測定する方法は次の通りである。
【0040】
位置測定装置は、磁場情報及び加速度情報を組合せて(ステップS301)、組合せた結果から端末の位置に対するそれぞれ異なる2つの成分(ここでは、端末の位置に対する磁場の垂直成分及び水平成分)を分離する(ステップS303)。
【0041】
位置測定装置は、組合せた磁場情報(ここでは、磁場ベクトル(m))及び加速度情報(ここでは、重力ベクトル(g))から下の数式(3)のように地面に対して垂直な方向への磁場成分(mperp)及び地面に対して水平(平行)な方向への磁場成分(mparr)を算出して、各々を互いに分離する。
【0042】
【数3】
【0043】
数式(3)において、地面に対して垂直な方向への磁場成分(mperp)は、端末の位置に対する磁場の垂直成分であり、地面に対して水平(平行)な方向への磁場成分(mparr)は、端末の位置に対する磁場の水平成分である。
【0044】
位置測定装置は、地面ではない他のいかなる平面を基準として磁場成分を分離してもよい。
【0045】
その後、位置測定装置は、磁場マップにステップS303で分離した端末の位置に対する磁場の垂直成分及び水平成分をマッチング(ステップS305)して端末の位置を測定する(ステップS307)。
【0046】
上述したステップを介して測定された端末の位置及び方向を再び利用できる場合には、測定された磁場の方向を磁場マップに合うように変換してもよい。
【0047】
図4は、図1に示した端末の位置を測定する方法(ステップS111)の他の例を示すフローチャートである。
【0048】
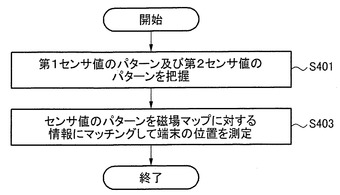
位置測定装置は、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握し(ステップS401)、第1情報及び第2情報の把握されたパターンを磁場マップにマッチングして端末の位置を測定する(ステップS403)。
【0049】
例えば、磁場センサから取得された磁場情報が不規則な波紋のパターンを有し、加速度センサから取得した加速度情報が傾きを有する矢印パターンを有すると仮定する。
【0050】
このような場合、位置測定装置は、磁場センサから取得した不規則な波紋のパターン、及び加速度センサから取得した傾きを有する矢印パターンを、例えば、後述する図6のような磁場マップにマッチングさせる。
【0051】
その後、位置測定装置は、磁場マップで角度センサ値のパターンに一致する部分(又は、地点)の位置又は座標などを端末の位置として測定する。
【0052】
一般的に一点における磁場の大きさは特定(unique)されない。従って、図4のように磁場情報又はその他のセンサ値の変化するパターンを把握することによって、その位置を測定(又は、推定)してもよい。
【0053】
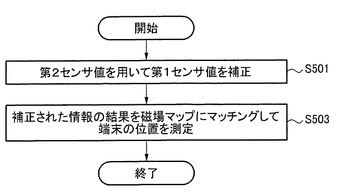
図5は、図1に示した端末の位置を測定する方法(ステップS111)の更に他の例を示すフローチャートである。
【0054】
位置測定装置は、第2センサによって検出された第2情報を用いて第1センサによって検出された第1情報を補正し(ステップS501)、補正された情報の結果を磁場マップにマッチングして端末の位置を測定する(ステップS503)。例えば、第1センサが磁場センサであり、第2センサが慣性センサ又は超音波センサであると仮定する。位置測定装置は、慣性センサ又は超音波センサから取得した慣性情報又は超音波情報を用いて磁場センサから取得した磁場情報を補正する。位置測定装置は、補正された磁場情報の結果を磁場マップに含まれる要素(例えば、磁場の大きさ、3軸(x、y、z)に対する成分値、磁北方向、偏角、伏角、磁場の変化量、及び磁場のフーリエ変換値など)にマッチングして端末の位置を測定する。
【0055】
この他にも、位置測定装置は、端末に含まれる第3センサから取得したセンサ値を用いて第2センサによって検出された第2情報を補正し、その補正された結果を用いて第1センサによって検出された第1情報を補正してもよい。ここで、第3センサは、第1センサ及び第2センサとは異なるセンサであり、加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであってもよい。また、位置測定装置は、セルラー通信信号、ワイファイ信号、及び超広帯域信号(Ultra−Wideband:UWB)信号などの測定値を用いて第1センサ又は第2センサから取得した値を補正してもよい。
【0056】
図3〜図5によって上述した実施形態は、図1のステップS111及び図2のステップS209にも同様に適用することができる。
【0057】
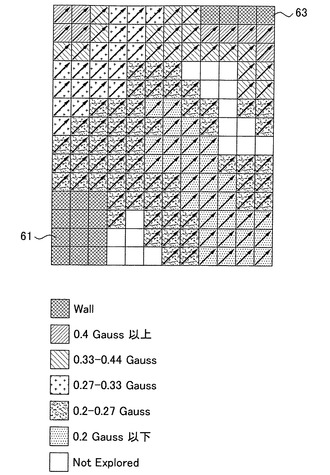
図6は、磁場マップの例示的な図である。
【0058】
図6は、壁(Wall)61、63が存在する室内空間に対する磁場マップの例示的な図であり、磁場マップは、複数のセル(cell)(又は、格子(grid))で構成される。ここで、各セルの矢印は磁北方向を示し、矢印の濃さ(濃度)は磁場の大きさを示す。
【0059】
磁場の地図に関する情報は、図6の磁場マップに現れた情報以外にも、端末が位置する領域を含む地域、該当地域に含まれる建物、該当建物に含まれる区域の各々に対する磁場の大きさ、3軸(x、y、z)に対する成分値、偏角、伏角、磁場の変化量、磁場のフーリエ変換値などを含んでもよい。
【0060】
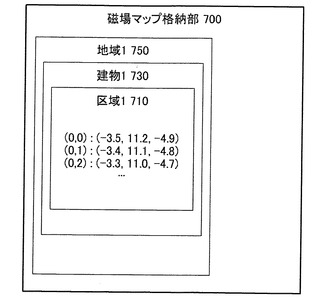
図7は、本発明の一実施形態による磁場マップ格納部を示す図である。
【0061】
磁場マップ格納部700は、格納された磁場マップを、端末が位置する領域を含む地域750、該当地域に含まれる建物730、及び該当建物に含まれる区域710に対する磁場マップを階層的構造で格納する。
【0062】
図7において、磁場マップは、磁場マップに対する座標情報を含む。ここで、座標情報は特定基準点を基準とする座標形態で格納され、各座標における磁場情報は特定基準点を基準軸とする(x、y、z)成分値で格納される。
【0063】
即ち、図7において、特定基準点を基準とする座標情報が(0,1)である場合、座標(0,1)における磁場情報は、特定基準点を基準軸とするx、y、z方向に対する成分値(−3.3、11.0、−4.7)として格納される。
【0064】
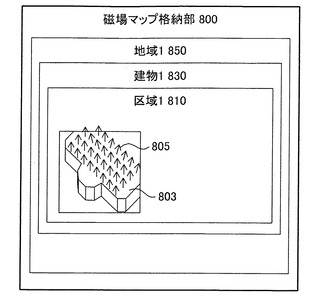
図8は、本発明の他の実施形態による磁場マップ格納部を示す図である。
【0065】
図7と同様に、磁場マップ格納部800は、格納された磁場マップを、端末が位置する領域を含む地域850、該当地域に含まれる建物830、及び該当建物に含まれる区域810に対する磁場マップを階層的構造で格納する。
【0066】
図8において、磁場マップは、磁場マップに対する座標情報を含む。ここで、座標情報は、図8のように絵で示された地図803上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向で格納される。
【0067】
図8において、矢印805の濃さ(濃度)は磁場の大きさを示し、矢印805の傾きの程度は磁北方向を示す。
【0068】
図7及び図8によって示した実施形態の他にも、磁場マップは、羅列型構造、ハッシュ構造、使用頻度に応じて格納するキャッシュ構造などの様々な方式で格納してもよい。また、磁場マップに関する情報は、磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値などの様々な形態の磁場情報を含んでもよい。
【0069】
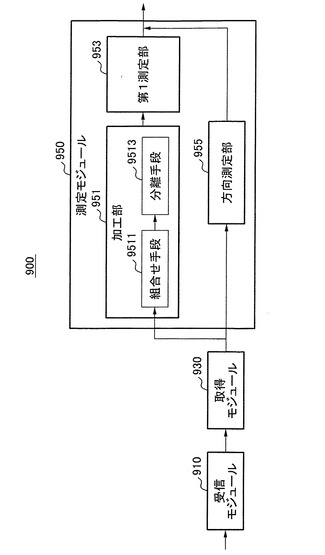
図9は、本発明の一実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【0070】
磁場を利用した端末の位置測定装置900は、受信モジュール910、取得モジュール930、及び測定モジュール950を含む。
【0071】
受信モジュール910は、端末が位置する領域の磁場マップを受信する。
【0072】
受信モジュール910は、図7又は図8で説明した磁場マップ格納部700、800から端末が位置する領域の磁場マップを受信する。磁場マップ格納部700、800は、位置測定装置を含む端末の内部に位置してもよく、端末の外部に位置してもよい。
【0073】
取得モジュール930は、端末に含まれ、第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する。ここで、第1センサは磁場情報を検出する磁場センサであり、第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つである。
【0074】
測定モジュール950は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定する。
【0075】
測定モジュール950は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を加工する加工部951、及び磁場マップに加工部951で加工された結果をマッチングして端末の位置を測定する第1測定部953を含む。
【0076】
加工部951は、組合せ手段9511及び分離手段9513を含む。
【0077】
組合せ手段9511は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を組合せる。分離手段9513は、組合せ手段9511で組合せた結果から端末の位置に対するそれぞれ異なる少なくとも2つの成分を分離する。
【0078】
ここで、少なくとも2つの成分は、端末の位置に対する磁場の垂直成分(即ち、地面に対して垂直な方向への磁場成分)と水平成分(地面に対して水平(平行)な方向への磁場成分)であってもよい。
【0079】
また、測定モジュール950は、磁場マップと、第1センサ及び第2センサの各々から取得したセンサ値を用いて端末の移動方向を測定する方向測定部955を更に含む。
【0080】
また、測定モジュール950は、把握部(図示せず)及び第2測定部(図示せず)を更に含んでもよい。
【0081】
把握部は、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握する。第2測定部は、第1情報及び前記第2情報の把握されたパターンを磁場マップにマッチングして端末の位置を測定する。
【0082】
この他にも、測定モジュール950は、補正部(図示せず)及び第3測定部(図示せず)を更に含んでもよい。
【0083】
補正部は、第2センサによって検出された第2情報を用いて第1センサによって検出された第1情報を補正し、第3測定部は、補正された第1情報の結果を磁場マップにマッチングして端末の位置を測定する。
【0084】
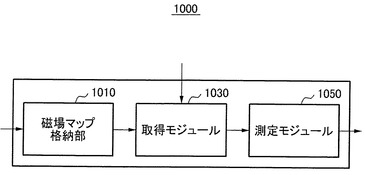
図10は、本発明の他の実施形態による磁場を利用した端末の位置測定装置のブロック図である。位置測定装置1000は、磁場マップ格納部1010、取得モジュール1030、及び測定モジュール1050を含む。位置測定装置1000は、装置内部に、図9の受信モジュール910に代わって磁場マップ格納部1010を備える。
【0085】
磁場マップ格納部1010は、端末が位置する領域の磁場マップを含む。磁場マップは、領域、区域、建物、及び地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうち少なくとも1つを含む。
【0086】
磁場マップ格納部1010には、端末が位置する領域を含む地域、該当地域に含まれる建物、及び該当建物に含まれる区域に対する磁場マップが階層的構造で格納される。
【0087】
磁場マップ格納部1010に対するより詳しい説明は、図7及び図8を参照する。
【0088】
取得モジュール1030及び測定モジュール1050に対する説明は、図9の取得モジュール930及び測定モジュール950を参照する。
【0089】
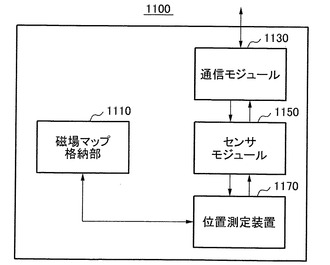
図11は、図9の磁場を利用した端末の位置測定装置を含む端末1100の一例を示すブロック図である。
【0090】
端末1100は、内部に磁場マップ格納部1110、通信モジュール1130、センサモジュール1150、及び位置測定装置1170を含む。端末1100が内部に磁場マップ格納部1110を含む場合、端末1100は、磁場マップを外部通信を介して受信する必要がない。但し、磁場マップに対するアップデートを行う場合は、外部通信を介してアップデートされた情報を受信してもよい。
【0091】
磁場マップ格納部1110は、上述した磁場マップを格納する。
【0092】
通信モジュール1130は、端末1100固有の機能である外部との通信を行うモジュールとして、例えば、超広帯域通信、セルラー通信、ワイファイ、ブルートゥース(登録商標)のような多様な近距離通信、近接通信などのように、多様な通信機能を介して音声、映像などの多様なデータを送受信する。
【0093】
センサモジュール1150は、端末1100に含まれる第1センサ及び第2センサなどのような複数のセンサを全て含むモジュールである。センサモジュール1150には、磁場センサ、加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサなどが含まれる。
【0094】
位置測定装置1170は、図1〜図10によって上述した磁場を利用した端末の位置測定装置であり、位置測定装置1170に対する説明は、上述した実施形態を参照する。
【0095】
図12は、図9の磁場を利用した端末の位置測定装置を含む端末の他の例を示すブロック図である。
【0096】
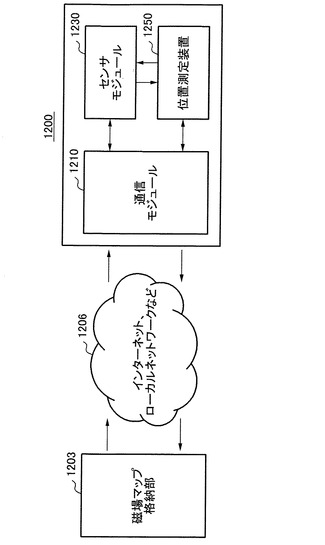
端末1200は、内部に通信モジュール1210、センサモジュール1230、及び位置測定装置1250を含む。図12において、端末1200は、その内部に磁場マップ格納部1203を含まない。従って、端末1200は、通信モジュール1210を用いて通信網1206を経て外部に格納された磁場マップ格納部1203に接続する。端末1200は、外部に格納された磁場マップ格納部1203から磁場マップを受信する。
【0097】
磁場マップ格納部1203は、上述したように磁場マップを格納する。
【0098】
また、磁場マップ格納部1203は、いくつかのサブ格納部を含むこともできる。この場合、磁場マップは、いくつかのサブ格納部に分けられて格納される。従って、端末1200は、それぞれのサブ格納部のうちの所望するサブ格納部に接続して必要な領域(又は、地域)に対する磁場マップを要求し、該当情報(ここでは、必要な磁場情報)を受信する。
【0099】
通信網1206は、インターネット、ローカルネットワーク、超広帯域無線通信網、近接通信網セルラー通信網、近距離通信網などを含む。
【0100】
通信モジュール1210、センサモジュール1230、及び位置測定装置1250に対する説明は、図11の通信モジュール1130、センサモジュール1150、及び位置測定装置1170の説明を参照する。
【0101】
本発明の実施形態による方法は、多様なコンピュータ手段によって行うことができるプログラム命令形態で具現され、コンピュータ読み取り可能な記録媒体に記録してもよい。記録媒体は、プログラム命令、データファイル、データ構造などを単独又は組合せたものを含んでもよい。記録媒体及びプログラム命令は、本発明の目的のために特別に設計して構成されたものでもよく、コンピュータソフトウェア分野の技術を有する当業者にとって公知のものであり使用可能なものであってもよい。コンピュータ読み取り可能な記録媒体の例としては、ハードディスク、フロッピー(登録商標)ディスク及び磁気テープのような磁気媒体、CD−ROM、DVDのような光記録媒体、フロプティカルディスクのような磁気−光媒体、及びROM、RAM、フラッシュメモリなどのようなプログラム命令を保存して実行するように特別に構成されたハードウェア装置を含んでもよい。プログラム命令の例としては、コンパイラによって生成されるような機械語コードだけでなく、インタプリタなどを用いてコンピュータによって実行され得る高級言語コードを含む。上述のハードウェア装置は、本発明の動作を行うために1つ以上のソフトウェアモジュールとして作動するように構成してもよく、その逆も同様である。
【0102】
以上、図面を参照しながら本発明の実施形態を説明したが、本発明は、上述の実施形態に限定されるものではなく、本発明の技術思想から逸脱しない範囲内で多様に変更実施することが可能である。
【符号の説明】
【0103】
61、63 壁
700、800 磁場マップ格納部
710、810 建物に含まれる区域
730、830 該当地域に含まれる建物
750、850 端末が位置する領域を含む地域
803 地図
805 矢印
900、1100 磁場を利用した端末の位置測定装置(位置測定装置)
910 受信モジュール
930、1030 取得モジュール
950、1050 測定モジュール
951 加工部
953 第1測定部
955 方向測定部
1000、1170、1250 位置測定装置
1010、1110、1203 磁場マップ格納部
1130、1210 通信モジュール
1150、1230 センサモジュール
1200 端末
1206 通信網
9511 組合せ手段
9513 分離手段
【技術分野】
【0001】
本発明は、磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体に関する。
【背景技術】
【0002】
室内環境で端末の位置を測定する方法として、無線LAN(Wireless LAN:Wi−Fi)信号を用いる方式、慣性センサ(Inertial Measurement Unit:IMU)を用いる方式、超音波発生器(Sonar)を用いる方式、超広帯域信号(Ultra−Wideband:UWB)を用いる方式、赤外線信号(Infrared signal)を用いる方式などがある。しかし、無線LAN信号を用いる方式は正確度が非常に低く、慣性センサを用いる方式は独立的に用いることはできない。また、超音波信号、超広帯域信号、及び赤外線信号を用いる方式は、室内インフラ(infrastructure)を設置しなければならないという問題があり、高い費用を避けることができない。
【0003】
また、端末は、ユーザが移動する際に同じ建物であっても異なる階を移動することがあるため、それぞれ異なる階における正確な位置を把握することが必要である。
【0004】
従って、追加的なインフラを必要とせずに端末の位置をより正確に測定できる方法及び装置が求められている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の問題点に鑑みてなされたものであって、本発明の目的は、追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するためになされた本発明の一態様による磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の位置を測定するステップと、を有する。
【0007】
前記第1センサは、磁場情報を検出する磁場センサであり、前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであり得る。
前記端末の位置を測定するステップは、前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工するステップと、前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定するステップと、を含み得る。
前記記第1情報及び第2情報を加工するステップは、前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せるステップと、前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離するステップと、を含み得る。
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含み得る。
また、前記端末の位置を測定するステップは、前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握するステップと、前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含んでもよい。
また、前記端末の位置を測定するステップは、前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正するステップと、前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含んでもよい。
また、前記端末の位置を測定するステップは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定するステップを更に含み得る。
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含み得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、特定基準点を基準とする座標形態で格納され、各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納され得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、絵で表示される地図上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向として格納され得る。
また、前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含み得る。
前記磁場を利用した端末の位置測定方法は、前記端末が位置する領域に対する磁場マップを要求するステップを更に含んでもよい。
また、前記磁場を利用した端末の位置測定方法は、前記第2センサに対する利用有無の選択を受信するステップを更に含んでもよい。
【0008】
上記目的を達成するためになされた本発明の一態様による磁場を利用した端末の位置測定装置は、端末が位置する領域の磁場マップを受信する受信モジュールと、前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する取得モジュールと、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報から取得したセンサ値に基づいて前記端末の位置を測定する測定モジュールと、を備える。
【0009】
前記第1センサは、磁場情報を検出する磁場センサであり、前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであり得る。
前記測定モジュールは、前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工する加工部と、前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定する第1測定部と、を含み得る。
前記加工部は、前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せる組合せ手段と、前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離する分離手段と、を含み得る。
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含み得る。
また、前記測定モジュールは、前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握する把握部と、前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定する第2測定部と、を含んでもよい。
また、前記測定モジュールは、前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正する補正部と、前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定する第3測定部と、を含んでもよい。
また、前記測定モジュールは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定する方向測定部を更に含み得る。
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含み得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、特定基準点を基準とする座標形態で格納され、各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納され得る。
また、前記磁場マップは、座標情報を含み、前記座標情報は、絵で表示される地図上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向として格納され得る。
また、前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含み得る。
前記磁場を利用した端末の位置測定装置は、前記端末が位置する領域に対する磁場マップを要求する要求部を更に含んでもよい。
【発明の効果】
【0010】
本発明によれば、端末に含まれるセンサを用いることによって追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる。
また、端末に含まれる磁場センサ及び複数のセンサのセンサ値を共に利用することによって端末周辺に関する情報提供や歩行者ナビゲーションのためのより精密な位置情報サービス(Location Based Services:LBS)を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【図2】本発明の他の実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【図3】図1に示した端末の位置を測定する方法(ステップS111)の一例を示すフローチャートである。
【図4】図1に示した端末の位置を測定する方法(ステップS111)の他の例を示すフローチャートである。
【図5】図1に示した端末の位置を測定する方法(ステップS111)の更に他の例を示すフローチャートである。
【図6】磁場マップの例示的な図である。
【図7】本発明の一実施形態による磁場マップ格納部を示す図である。
【図8】本発明の他の実施形態による磁場マップ格納部を示す図である。
【図9】本発明の一実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【図10】本発明の他の実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【図11】図9の磁場を利用した端末の位置測定装置を含む端末の一例を示すブロック図である。
【図12】図9の磁場を利用した端末の位置測定装置を含む端末の他の例を示すブロック図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態の具体例を、図面を参照しながら詳細に説明する。しかし、本発明が実施形態によって制限されたり限定されたりすることはない。また、各図面に提示した同一の参照符号は同一の部材を示す。
【0013】
図1は、本発明の一実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【0014】
磁場を利用した端末の位置測定装置(以下、単に「位置測定装置」とも称する。)は、端末が位置する領域の周辺の位置を探索し(ステップS101)、該当領域の位置が限界誤差範囲内の位置であるか否かを判断する(ステップS103)。
【0015】
ステップS103の判断の結果、該当領域の位置が限界誤差範囲内の位置である場合、位置測定装置は、端末が位置する領域に対する磁場マップを要求する(ステップS105)。
【0016】
ここで、位置測定装置は、磁場マップが格納された磁場マップ格納部に、端末が位置する領域を含む区域の名前、アドレス、緯度又は経度の範囲などの形態で磁場マップを要求する。即ち、位置測定装置は、例えば、OO−XX番地、YYビル、或いはZZ区域などの形態で、端末が位置する領域の磁場マップを要求する。位置測定装置は、この他にも磁場マップで端末が位置する領域を示すことができる様々な方法を用いて磁場マップを要求してもよい。
【0017】
ステップS103の判断の結果、端末が位置する該当領域の位置が限界誤差範囲外の位置である場合、位置測定装置は、再びステップS101に戻って周辺の位置探索を継続する。
【0018】
位置測定装置は、磁場マップ格納部から端末が位置する領域の磁場マップを受信する(ステップS107)。磁場マップ格納部は、位置測定装置の内部に位置してもよく、位置測定装置を含む端末の内部又は外部に位置してもよい。磁場マップ格納部が端末の外部に位置する場合、位置測定装置は、端末のセルラー通信、ワイファイ(WiFi)又はその他の通信機能を介して磁場マップ格納部に格納された情報を受信する。
【0019】
磁場マップ格納部、及び磁場マップ格納部が格納する磁場マップは、後述する図7及び図8を参照して詳細に説明する。
【0020】
位置測定装置は、端末に含まれるそれぞれ異なる第1センサ及び第2センサの各々からセンサ値を受信する(ステップS109)。ここで、第1センサは磁場情報を検出する磁場センサであり、第2センサは加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つである。従って、第1センサによって検出された第1情報のセンサ値は磁場情報であり、第2センサから取得した第2情報のセンサ値は加速度情報、慣性情報、ジャイロセンサ情報、圧力情報、及び超音波情報のうちのいずれか1つである。
【0021】
位置測定装置は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定する(ステップS111)。ここで、位置測定装置は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を加工し、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握した後、その結果を磁場マップにマッチングして端末の位置を測定する。位置測定装置が端末の位置を測定する具体的な方法は、後述する図3〜図5を参照して詳細に説明する。
【0022】
図2は、本発明の他の実施形態による磁場を利用した端末の位置測定方法を示すフローチャートである。
【0023】
位置測定装置は、磁場マップ格納部又はその他の磁場マップを格納する装置に、端末が位置する領域に対する磁場マップを要求する(ステップS201)。
【0024】
位置測定装置は、これに対する応答として、端末が位置する領域の磁場マップを受信する(ステップS203)。
【0025】
ここで、位置測定装置が受信する磁場マップは、端末が位置する該当領域、該当領域を含む該当地域、該当地域に含まれる建物、及び建物に含まれる区域に対する磁場マップを含む。また、磁場マップは、該当領域、該当地域、建物、区域の各々に対する磁場の大きさ、3軸(x、y、z軸)に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうち少なくとも1つを含む。
【0026】
位置測定装置は、端末ユーザから第2センサの利用の有無に対する選択の入力を受ける(ステップS205)。ここで、位置測定装置は、端末ユーザに第2センサを用いるか否かを直接問い合わせ、別のモード設定又はスイッチのオン/オフ設定によって第2センサの利用の有無に対する選択の入力を受けてもよい。
【0027】
ステップS205において、端末ユーザから第2センサの利用の有無に対する選択を受けた場合、位置測定装置は、端末に含まれるそれぞれ異なる第1センサ及び第2センサの各々から検出された値を受信する(ステップS207)。
【0028】
位置測定装置は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報を用いて端末の位置を測定する(ステップS209)。また、位置測定装置は、磁場マップと、第1センサ及び第2センサの各々から検出された第1情報及び第2情報を用いて端末の移動方向も測定する(ステップS211)。
【0029】
一方、ステップS205において、端末ユーザから第2センサの利用の有無に対する選択を受けなかった場合、位置測定装置は、第2センサを除く第1センサからのみセンサ値を取得する(ステップS213)。この場合、ステップS209では、第1センサによって検出された第1情報(即ち、磁場情報)及び磁場マップだけを用いて端末の位置を測定することになる。また、ステップS211においても、第1センサによって検出された第1情報(即ち、磁場情報)及び磁場マップだけを用いて端末の移動方向を測定することになる。
【0030】
図3は、図1に示した端末の位置を測定する方法(ステップS111)の一例を示すフローチャートである。図3では、第1センサで磁場センサを用い、第2センサで加速度センサを利用した場合に、角度センサ値を用いて端末の位置を測定する方法を示す。
【0031】
端末の位置を測定する前に、位置測定装置は、ステップS109を介して第1センサ及び第2センサの各々からセンサ値を取得する。
【0032】
位置測定装置が第1センサの磁場センサから取得した磁場情報は、下の数式(1)のように磁場ベクトル(m)で表すことができる。
【0033】
【数1】
【0034】
ここで、mx、my、mzは、各々特定基準点(m)を基準軸とする磁場ベクトル(m)のx成分値、y成分値、及びz成分値を示す。
【0035】
また、位置測定装置が第2センサの加速度センサから取得した加速度情報は、下の数式(2)のように重力ベクトル(g)で表すことができる。ここで、加速度情報は、端末に含まれる加速度センサが停止状態の端末に対して測定した重力ベクトル(g)である。
【0036】
【数2】
【0037】
ここで、gx、gy、gzは、重力ベクトル(g)のx成分値、y成分値、及びz成分値を示し、|g|=1は、gx、gy、gzのノルム(norm)値、即ち重力ベクトル(g)の大きさが「1」で一定であることを示す。
【0038】
数式(2)の加速度情報は、加速度センサから取得したセンサ値にジャイロセンサから取得したセンサ値(即ち、ジャイロセンサ情報)などを追加して更に精密に補完した値であってもよい。
【0039】
角度センサ値を用いて端末の位置を測定する方法は次の通りである。
【0040】
位置測定装置は、磁場情報及び加速度情報を組合せて(ステップS301)、組合せた結果から端末の位置に対するそれぞれ異なる2つの成分(ここでは、端末の位置に対する磁場の垂直成分及び水平成分)を分離する(ステップS303)。
【0041】
位置測定装置は、組合せた磁場情報(ここでは、磁場ベクトル(m))及び加速度情報(ここでは、重力ベクトル(g))から下の数式(3)のように地面に対して垂直な方向への磁場成分(mperp)及び地面に対して水平(平行)な方向への磁場成分(mparr)を算出して、各々を互いに分離する。
【0042】
【数3】
【0043】
数式(3)において、地面に対して垂直な方向への磁場成分(mperp)は、端末の位置に対する磁場の垂直成分であり、地面に対して水平(平行)な方向への磁場成分(mparr)は、端末の位置に対する磁場の水平成分である。
【0044】
位置測定装置は、地面ではない他のいかなる平面を基準として磁場成分を分離してもよい。
【0045】
その後、位置測定装置は、磁場マップにステップS303で分離した端末の位置に対する磁場の垂直成分及び水平成分をマッチング(ステップS305)して端末の位置を測定する(ステップS307)。
【0046】
上述したステップを介して測定された端末の位置及び方向を再び利用できる場合には、測定された磁場の方向を磁場マップに合うように変換してもよい。
【0047】
図4は、図1に示した端末の位置を測定する方法(ステップS111)の他の例を示すフローチャートである。
【0048】
位置測定装置は、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握し(ステップS401)、第1情報及び第2情報の把握されたパターンを磁場マップにマッチングして端末の位置を測定する(ステップS403)。
【0049】
例えば、磁場センサから取得された磁場情報が不規則な波紋のパターンを有し、加速度センサから取得した加速度情報が傾きを有する矢印パターンを有すると仮定する。
【0050】
このような場合、位置測定装置は、磁場センサから取得した不規則な波紋のパターン、及び加速度センサから取得した傾きを有する矢印パターンを、例えば、後述する図6のような磁場マップにマッチングさせる。
【0051】
その後、位置測定装置は、磁場マップで角度センサ値のパターンに一致する部分(又は、地点)の位置又は座標などを端末の位置として測定する。
【0052】
一般的に一点における磁場の大きさは特定(unique)されない。従って、図4のように磁場情報又はその他のセンサ値の変化するパターンを把握することによって、その位置を測定(又は、推定)してもよい。
【0053】
図5は、図1に示した端末の位置を測定する方法(ステップS111)の更に他の例を示すフローチャートである。
【0054】
位置測定装置は、第2センサによって検出された第2情報を用いて第1センサによって検出された第1情報を補正し(ステップS501)、補正された情報の結果を磁場マップにマッチングして端末の位置を測定する(ステップS503)。例えば、第1センサが磁場センサであり、第2センサが慣性センサ又は超音波センサであると仮定する。位置測定装置は、慣性センサ又は超音波センサから取得した慣性情報又は超音波情報を用いて磁場センサから取得した磁場情報を補正する。位置測定装置は、補正された磁場情報の結果を磁場マップに含まれる要素(例えば、磁場の大きさ、3軸(x、y、z)に対する成分値、磁北方向、偏角、伏角、磁場の変化量、及び磁場のフーリエ変換値など)にマッチングして端末の位置を測定する。
【0055】
この他にも、位置測定装置は、端末に含まれる第3センサから取得したセンサ値を用いて第2センサによって検出された第2情報を補正し、その補正された結果を用いて第1センサによって検出された第1情報を補正してもよい。ここで、第3センサは、第1センサ及び第2センサとは異なるセンサであり、加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであってもよい。また、位置測定装置は、セルラー通信信号、ワイファイ信号、及び超広帯域信号(Ultra−Wideband:UWB)信号などの測定値を用いて第1センサ又は第2センサから取得した値を補正してもよい。
【0056】
図3〜図5によって上述した実施形態は、図1のステップS111及び図2のステップS209にも同様に適用することができる。
【0057】
図6は、磁場マップの例示的な図である。
【0058】
図6は、壁(Wall)61、63が存在する室内空間に対する磁場マップの例示的な図であり、磁場マップは、複数のセル(cell)(又は、格子(grid))で構成される。ここで、各セルの矢印は磁北方向を示し、矢印の濃さ(濃度)は磁場の大きさを示す。
【0059】
磁場の地図に関する情報は、図6の磁場マップに現れた情報以外にも、端末が位置する領域を含む地域、該当地域に含まれる建物、該当建物に含まれる区域の各々に対する磁場の大きさ、3軸(x、y、z)に対する成分値、偏角、伏角、磁場の変化量、磁場のフーリエ変換値などを含んでもよい。
【0060】
図7は、本発明の一実施形態による磁場マップ格納部を示す図である。
【0061】
磁場マップ格納部700は、格納された磁場マップを、端末が位置する領域を含む地域750、該当地域に含まれる建物730、及び該当建物に含まれる区域710に対する磁場マップを階層的構造で格納する。
【0062】
図7において、磁場マップは、磁場マップに対する座標情報を含む。ここで、座標情報は特定基準点を基準とする座標形態で格納され、各座標における磁場情報は特定基準点を基準軸とする(x、y、z)成分値で格納される。
【0063】
即ち、図7において、特定基準点を基準とする座標情報が(0,1)である場合、座標(0,1)における磁場情報は、特定基準点を基準軸とするx、y、z方向に対する成分値(−3.3、11.0、−4.7)として格納される。
【0064】
図8は、本発明の他の実施形態による磁場マップ格納部を示す図である。
【0065】
図7と同様に、磁場マップ格納部800は、格納された磁場マップを、端末が位置する領域を含む地域850、該当地域に含まれる建物830、及び該当建物に含まれる区域810に対する磁場マップを階層的構造で格納する。
【0066】
図8において、磁場マップは、磁場マップに対する座標情報を含む。ここで、座標情報は、図8のように絵で示された地図803上の位置形態で格納され、各位置における磁場情報は、磁場の大きさ及び磁北方向で格納される。
【0067】
図8において、矢印805の濃さ(濃度)は磁場の大きさを示し、矢印805の傾きの程度は磁北方向を示す。
【0068】
図7及び図8によって示した実施形態の他にも、磁場マップは、羅列型構造、ハッシュ構造、使用頻度に応じて格納するキャッシュ構造などの様々な方式で格納してもよい。また、磁場マップに関する情報は、磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値などの様々な形態の磁場情報を含んでもよい。
【0069】
図9は、本発明の一実施形態による磁場を利用した端末の位置測定装置のブロック図である。
【0070】
磁場を利用した端末の位置測定装置900は、受信モジュール910、取得モジュール930、及び測定モジュール950を含む。
【0071】
受信モジュール910は、端末が位置する領域の磁場マップを受信する。
【0072】
受信モジュール910は、図7又は図8で説明した磁場マップ格納部700、800から端末が位置する領域の磁場マップを受信する。磁場マップ格納部700、800は、位置測定装置を含む端末の内部に位置してもよく、端末の外部に位置してもよい。
【0073】
取得モジュール930は、端末に含まれ、第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する。ここで、第1センサは磁場情報を検出する磁場センサであり、第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つである。
【0074】
測定モジュール950は、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定する。
【0075】
測定モジュール950は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を加工する加工部951、及び磁場マップに加工部951で加工された結果をマッチングして端末の位置を測定する第1測定部953を含む。
【0076】
加工部951は、組合せ手段9511及び分離手段9513を含む。
【0077】
組合せ手段9511は、第1センサによって検出された第1情報及び第2センサによって検出された第2情報を組合せる。分離手段9513は、組合せ手段9511で組合せた結果から端末の位置に対するそれぞれ異なる少なくとも2つの成分を分離する。
【0078】
ここで、少なくとも2つの成分は、端末の位置に対する磁場の垂直成分(即ち、地面に対して垂直な方向への磁場成分)と水平成分(地面に対して水平(平行)な方向への磁場成分)であってもよい。
【0079】
また、測定モジュール950は、磁場マップと、第1センサ及び第2センサの各々から取得したセンサ値を用いて端末の移動方向を測定する方向測定部955を更に含む。
【0080】
また、測定モジュール950は、把握部(図示せず)及び第2測定部(図示せず)を更に含んでもよい。
【0081】
把握部は、第1センサによって検出された第1情報のパターン及び第2センサによって検出された第2情報のパターンを把握する。第2測定部は、第1情報及び前記第2情報の把握されたパターンを磁場マップにマッチングして端末の位置を測定する。
【0082】
この他にも、測定モジュール950は、補正部(図示せず)及び第3測定部(図示せず)を更に含んでもよい。
【0083】
補正部は、第2センサによって検出された第2情報を用いて第1センサによって検出された第1情報を補正し、第3測定部は、補正された第1情報の結果を磁場マップにマッチングして端末の位置を測定する。
【0084】
図10は、本発明の他の実施形態による磁場を利用した端末の位置測定装置のブロック図である。位置測定装置1000は、磁場マップ格納部1010、取得モジュール1030、及び測定モジュール1050を含む。位置測定装置1000は、装置内部に、図9の受信モジュール910に代わって磁場マップ格納部1010を備える。
【0085】
磁場マップ格納部1010は、端末が位置する領域の磁場マップを含む。磁場マップは、領域、区域、建物、及び地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうち少なくとも1つを含む。
【0086】
磁場マップ格納部1010には、端末が位置する領域を含む地域、該当地域に含まれる建物、及び該当建物に含まれる区域に対する磁場マップが階層的構造で格納される。
【0087】
磁場マップ格納部1010に対するより詳しい説明は、図7及び図8を参照する。
【0088】
取得モジュール1030及び測定モジュール1050に対する説明は、図9の取得モジュール930及び測定モジュール950を参照する。
【0089】
図11は、図9の磁場を利用した端末の位置測定装置を含む端末1100の一例を示すブロック図である。
【0090】
端末1100は、内部に磁場マップ格納部1110、通信モジュール1130、センサモジュール1150、及び位置測定装置1170を含む。端末1100が内部に磁場マップ格納部1110を含む場合、端末1100は、磁場マップを外部通信を介して受信する必要がない。但し、磁場マップに対するアップデートを行う場合は、外部通信を介してアップデートされた情報を受信してもよい。
【0091】
磁場マップ格納部1110は、上述した磁場マップを格納する。
【0092】
通信モジュール1130は、端末1100固有の機能である外部との通信を行うモジュールとして、例えば、超広帯域通信、セルラー通信、ワイファイ、ブルートゥース(登録商標)のような多様な近距離通信、近接通信などのように、多様な通信機能を介して音声、映像などの多様なデータを送受信する。
【0093】
センサモジュール1150は、端末1100に含まれる第1センサ及び第2センサなどのような複数のセンサを全て含むモジュールである。センサモジュール1150には、磁場センサ、加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサなどが含まれる。
【0094】
位置測定装置1170は、図1〜図10によって上述した磁場を利用した端末の位置測定装置であり、位置測定装置1170に対する説明は、上述した実施形態を参照する。
【0095】
図12は、図9の磁場を利用した端末の位置測定装置を含む端末の他の例を示すブロック図である。
【0096】
端末1200は、内部に通信モジュール1210、センサモジュール1230、及び位置測定装置1250を含む。図12において、端末1200は、その内部に磁場マップ格納部1203を含まない。従って、端末1200は、通信モジュール1210を用いて通信網1206を経て外部に格納された磁場マップ格納部1203に接続する。端末1200は、外部に格納された磁場マップ格納部1203から磁場マップを受信する。
【0097】
磁場マップ格納部1203は、上述したように磁場マップを格納する。
【0098】
また、磁場マップ格納部1203は、いくつかのサブ格納部を含むこともできる。この場合、磁場マップは、いくつかのサブ格納部に分けられて格納される。従って、端末1200は、それぞれのサブ格納部のうちの所望するサブ格納部に接続して必要な領域(又は、地域)に対する磁場マップを要求し、該当情報(ここでは、必要な磁場情報)を受信する。
【0099】
通信網1206は、インターネット、ローカルネットワーク、超広帯域無線通信網、近接通信網セルラー通信網、近距離通信網などを含む。
【0100】
通信モジュール1210、センサモジュール1230、及び位置測定装置1250に対する説明は、図11の通信モジュール1130、センサモジュール1150、及び位置測定装置1170の説明を参照する。
【0101】
本発明の実施形態による方法は、多様なコンピュータ手段によって行うことができるプログラム命令形態で具現され、コンピュータ読み取り可能な記録媒体に記録してもよい。記録媒体は、プログラム命令、データファイル、データ構造などを単独又は組合せたものを含んでもよい。記録媒体及びプログラム命令は、本発明の目的のために特別に設計して構成されたものでもよく、コンピュータソフトウェア分野の技術を有する当業者にとって公知のものであり使用可能なものであってもよい。コンピュータ読み取り可能な記録媒体の例としては、ハードディスク、フロッピー(登録商標)ディスク及び磁気テープのような磁気媒体、CD−ROM、DVDのような光記録媒体、フロプティカルディスクのような磁気−光媒体、及びROM、RAM、フラッシュメモリなどのようなプログラム命令を保存して実行するように特別に構成されたハードウェア装置を含んでもよい。プログラム命令の例としては、コンパイラによって生成されるような機械語コードだけでなく、インタプリタなどを用いてコンピュータによって実行され得る高級言語コードを含む。上述のハードウェア装置は、本発明の動作を行うために1つ以上のソフトウェアモジュールとして作動するように構成してもよく、その逆も同様である。
【0102】
以上、図面を参照しながら本発明の実施形態を説明したが、本発明は、上述の実施形態に限定されるものではなく、本発明の技術思想から逸脱しない範囲内で多様に変更実施することが可能である。
【符号の説明】
【0103】
61、63 壁
700、800 磁場マップ格納部
710、810 建物に含まれる区域
730、830 該当地域に含まれる建物
750、850 端末が位置する領域を含む地域
803 地図
805 矢印
900、1100 磁場を利用した端末の位置測定装置(位置測定装置)
910 受信モジュール
930、1030 取得モジュール
950、1050 測定モジュール
951 加工部
953 第1測定部
955 方向測定部
1000、1170、1250 位置測定装置
1010、1110、1203 磁場マップ格納部
1130、1210 通信モジュール
1150、1230 センサモジュール
1200 端末
1206 通信網
9511 組合せ手段
9513 分離手段
【特許請求の範囲】
【請求項1】
端末が位置する領域の磁場マップを受信するステップと、
前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、
前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の位置を測定するステップと、を有することを特徴とする磁場を利用した端末の位置測定方法。
【請求項2】
前記第1センサは、磁場情報を検出する磁場センサであり、
前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであることを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項3】
前記端末の位置を測定するステップは、
前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工するステップと、
前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項4】
前記第1情報及び第2情報を加工するステップは、
前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せるステップと、
前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離するステップと、を含むことを特徴とする請求項3に記載の磁場を利用した端末の位置測定方法。
【請求項5】
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含むことを特徴とする請求項4に記載の磁場を利用した端末の位置測定方法。
【請求項6】
前記端末の位置を測定するステップは、
前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握するステップと、
前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項7】
前記端末の位置を測定するステップは、
前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正するステップと、
前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項8】
前記端末の位置を測定するステップは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項9】
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項10】
前記磁場マップは、座標情報を含み、
前記座標情報は、特定基準点を基準とする座標形態で格納され、
各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納されることを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項11】
前記磁場マップは、座標情報を含み、
前記座標情報は、絵で表示される地図上の位置形態で格納され、
各位置における磁場情報は、磁場の大きさ及び磁北方向として格納されることを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項12】
前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含むことを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項13】
前記端末が位置する領域に対する磁場マップを要求するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項14】
前記第2センサに対する利用の有無の選択を受信するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項15】
請求項1乃至14のいずれか1項に記載の磁場を利用した端末の位置測定方法を実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項16】
端末が位置する領域の磁場マップを受信する受信モジュールと、
前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する取得モジュールと、
前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報から取得したセンサ値に基づいて前記端末の位置を測定する測定モジュールと、を備えることを特徴とする磁場を利用した端末の位置測定装置。
【請求項17】
前記第1センサは、磁場情報を検出する磁場センサであり、
前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであることを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項18】
前記測定モジュールは、
前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工する加工部と、
前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定する第1測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項19】
前記加工部は、
前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せる組合せ手段と、
前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離する分離手段と、を含むことを特徴とする請求項18に記載の磁場を利用した端末の位置測定装置。
【請求項20】
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含むことを特徴とする請求項19に記載の磁場を利用した端末の位置測定装置。
【請求項21】
前記測定モジュールは、
前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握する把握部と、
前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定する第2測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項22】
前記測定モジュールは、
前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正する補正部と、
前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定する第3測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項23】
前記測定モジュールは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定する方向測定部を更に含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項24】
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項25】
前記磁場マップは、座標情報を含み、
前記座標情報は、特定基準点を基準とする座標形態で格納され、
各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納されることを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項26】
前記磁場マップは、座標情報を含み、
前記座標情報は、絵で表示される地図上の位置形態で格納され、
各位置における磁場情報は、磁場の大きさ及び磁北方向として格納されることを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項27】
前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含むことを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項28】
前記端末が位置する領域に対する磁場マップを要求する要求部を更に含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項29】
前記受信モジュールは、前記第2センサに対する利用の有無の選択を受信することを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項1】
端末が位置する領域の磁場マップを受信するステップと、
前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、
前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の位置を測定するステップと、を有することを特徴とする磁場を利用した端末の位置測定方法。
【請求項2】
前記第1センサは、磁場情報を検出する磁場センサであり、
前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであることを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項3】
前記端末の位置を測定するステップは、
前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工するステップと、
前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項4】
前記第1情報及び第2情報を加工するステップは、
前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せるステップと、
前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離するステップと、を含むことを特徴とする請求項3に記載の磁場を利用した端末の位置測定方法。
【請求項5】
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含むことを特徴とする請求項4に記載の磁場を利用した端末の位置測定方法。
【請求項6】
前記端末の位置を測定するステップは、
前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握するステップと、
前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項7】
前記端末の位置を測定するステップは、
前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正するステップと、
前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定するステップと、を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項8】
前記端末の位置を測定するステップは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項9】
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項10】
前記磁場マップは、座標情報を含み、
前記座標情報は、特定基準点を基準とする座標形態で格納され、
各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納されることを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項11】
前記磁場マップは、座標情報を含み、
前記座標情報は、絵で表示される地図上の位置形態で格納され、
各位置における磁場情報は、磁場の大きさ及び磁北方向として格納されることを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項12】
前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含むことを特徴とする請求項9に記載の磁場を利用した端末の位置測定方法。
【請求項13】
前記端末が位置する領域に対する磁場マップを要求するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項14】
前記第2センサに対する利用の有無の選択を受信するステップを更に含むことを特徴とする請求項1に記載の磁場を利用した端末の位置測定方法。
【請求項15】
請求項1乃至14のいずれか1項に記載の磁場を利用した端末の位置測定方法を実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項16】
端末が位置する領域の磁場マップを受信する受信モジュールと、
前記端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々からセンサ値を受信する取得モジュールと、
前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報から取得したセンサ値に基づいて前記端末の位置を測定する測定モジュールと、を備えることを特徴とする磁場を利用した端末の位置測定装置。
【請求項17】
前記第1センサは、磁場情報を検出する磁場センサであり、
前記第2センサは、加速度情報、慣性情報、速度情報、圧力情報、及び超音波情報を各々検出する加速度センサ、慣性センサ、ジャイロセンサ、圧力センサ、及び超音波センサのうちのいずれか1つであることを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項18】
前記測定モジュールは、
前記第1センサによって検出された第1情報及び前記第2センサによって検出された第2情報を加工する加工部と、
前記磁場マップに前記加工された結果をマッチングして前記端末の位置を測定する第1測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項19】
前記加工部は、
前記第1センサによって検出された第1情報と前記第2センサによって検出された第2情報とを組合せる組合せ手段と、
前記組合せた結果から前記端末の位置に対する少なくとも2つの成分を分離する分離手段と、を含むことを特徴とする請求項18に記載の磁場を利用した端末の位置測定装置。
【請求項20】
前記少なくとも2つの成分は、前記端末の位置に対する磁場の垂直成分と水平成分とを含むことを特徴とする請求項19に記載の磁場を利用した端末の位置測定装置。
【請求項21】
前記測定モジュールは、
前記第1センサによって検出された第1情報のパターン及び前記第2センサによって検出された第2情報のパターンを把握する把握部と、
前記第1情報及び前記第2情報の把握されたパターンを前記磁場マップにマッチングして前記端末の位置を測定する第2測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項22】
前記測定モジュールは、
前記第2センサによって検出された第2情報に基づいて、前記第1センサによって検出された第1情報を補正する補正部と、
前記補正された第1情報の結果を前記磁場マップにマッチングして前記端末の位置を測定する第3測定部と、を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項23】
前記測定モジュールは、前記磁場マップ、前記第1センサによって検出された第1情報、及び前記第2センサによって検出された第2情報に基づいて前記端末の移動方向を測定する方向測定部を更に含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項24】
前記磁場マップは、前記端末が位置する領域を含む地域、前記地域に含まれる建物、及び前記建物に含まれる区域に対する磁場マップに関する情報を含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項25】
前記磁場マップは、座標情報を含み、
前記座標情報は、特定基準点を基準とする座標形態で格納され、
各座標における磁場情報は、前記特定基準点を基準軸とするx成分値、y成分値、及びz成分値で格納されることを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項26】
前記磁場マップは、座標情報を含み、
前記座標情報は、絵で表示される地図上の位置形態で格納され、
各位置における磁場情報は、磁場の大きさ及び磁北方向として格納されることを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項27】
前記磁場マップは、前記領域、前記区域、前記建物、及び前記地域に対する磁場の大きさ、x、y、z軸に対する成分値、磁北方向、偏角、伏角、磁場の変化量、磁場のフーリエ変換値のうちの少なくとも1つを含むことを特徴とする請求項24に記載の磁場を利用した端末の位置測定装置。
【請求項28】
前記端末が位置する領域に対する磁場マップを要求する要求部を更に含むことを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【請求項29】
前記受信モジュールは、前記第2センサに対する利用の有無の選択を受信することを特徴とする請求項16に記載の磁場を利用した端末の位置測定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−54033(P2013−54033A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−192583(P2012−192583)
【出願日】平成24年8月31日(2012.8.31)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成24年8月31日(2012.8.31)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]