
磁場分布取得装置
【課題】対象物との間において、異なる2つの距離における磁場分布の測定を高速に、かつ、精度よく行い、3次元磁場分布を高精度に取得する。
【解決手段】磁場分布取得装置は、磁場を測定するセンサ部2を有し、センサ部2では、第1センサ群21が対象物に対向する第1平面81上に離散的に配列されるとともに、第1平面81から対象物側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向において第1センサ群21と重なることなく離散的に配列される。これにより、磁場分布取得装置では、対象物との間において、異なる2つの距離における磁場分布の測定を高速に精度よく行うことができる。演算部では、第1センサ群21の第1測定値群、および、第2センサ群22の第2測定値群に基づいて、対象物に起因する3次元磁場が高精度に求められる。
【解決手段】磁場分布取得装置は、磁場を測定するセンサ部2を有し、センサ部2では、第1センサ群21が対象物に対向する第1平面81上に離散的に配列されるとともに、第1平面81から対象物側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向において第1センサ群21と重なることなく離散的に配列される。これにより、磁場分布取得装置では、対象物との間において、異なる2つの距離における磁場分布の測定を高速に精度よく行うことができる。演算部では、第1センサ群21の第1測定値群、および、第2センサ群22の第2測定値群に基づいて、対象物に起因する3次元磁場が高精度に求められる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元磁場分布を取得する磁場分布取得装置に関する。
【背景技術】
【0002】
従来より、超伝導量子干渉計(Superconducting Quantum Interference Device:SQUID)センサを用いて磁場分布を取得することが行われており、例えば、特許文献1では、ヘルメット状をなすセンサホルダにおいて、多数のSQUIDセンサを被験者の頭の表面に沿うように配置して固定し、被験者の脳の様々な位置から発生する磁場を検出する脳磁計が開示されている。
【0003】
また、特許文献2の3次元磁場分布の取得手法では、磁区を有する試料の上方において、磁気力顕微鏡を用いて特定の測定面での磁気力勾配の分布が2次元の磁気力勾配画像として取得される。また、上記測定面から微小距離dだけ離れた他の測定面にて測定を行って補助磁気力勾配画像が取得され、これらの差分を微小距離dで除算して磁気力勾配の勾配画像が取得される。磁気力勾配画像および磁気力勾配の勾配画像はフーリエ変換されてラプラス方程式の一般解から導かれる3次元場取得式に代入され、3次元磁気力勾配分布画像が高精度に取得される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−46350号公報
【特許文献2】国際公開第2008/123432号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の脳磁計では、ヘルメット状のセンサホルダにSQUIDセンサが固定されるため、特許文献2で示される3次元磁場分布の再構成を行うことができず、厳密な脳の深部の磁場の情報を正確に得ることができない。特許文献2の手法は、ラプラス方程式の厳密解を用いるため、磁場発生源までの磁場分布は厳密に再構成することができる。また、ヘルメット状のセンサ配置方法では、ウエハ上に集積するLSIプロセスが適用できず、高密度集積化に適さない。その結果、脳の深部の磁場を高精度に再構成することができず、脳の疾病に対する画像診断の精度向上に限界がある。
【0006】
一方、特許文献2のように、対象物との間において異なる2つの距離にて磁気力勾配分布(または、磁場ベクトルにおける特定方向への射影成分の特定方向のn回微分の2次元分布)を取得する場合に、センサ(例えば、特許文献2では、磁気力顕微鏡のカンチレバーの探針)を対象物に対して2次元に相対移動して磁気力勾配分布を取得するときには、一の測定面にてセンサを2次元に相対移動して磁気力勾配分布を取得した後に、当該測定面から微小距離だけ離れた他の測定面にて同様の測定がさらに行われる。したがって、測定に長時間を要し、周囲の温度変化による対象物の熱膨張や、対象物が生物である場合における当該対象物の動き等により、2つの測定面にて取得される2つの磁気力勾配分布において、測定面に垂直な方向に重なる2つの位置に対応する対象物上の部位が相違してしまう。この場合、磁気力勾配の勾配画像を精度よく取得することができず、3次元磁気力勾配分布を容易かつ高精度に取得することが困難となる。また、センサを、測定対象に接近と退避を繰り返した後、測定対象に対して1画素分のみ相対移動して、さらに測定対象に接近と退避を繰り返す、この一連の動作によって上記の、2つ測定画像を得る方法も想定されるが、この場合は、2枚の画像の面方向の位置ずれは軽減されるが、上記の方法と同様に測定時間を要するため、測定対象に対する距離の位置ずれの影響が発生する。
【0007】
本発明は上記課題に鑑みなされたものであり、対象物との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行い、3次元磁場分布を高精度に取得することを目的としている。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、3次元磁場分布を取得する磁場分布取得装置であって、磁場分布を測定する第1センサ群が対象物に対向する第1平面上に離散的に配列されるとともに、前記第1平面から前記対象物側に微小距離だけ離れ、かつ、前記第1平面に対して平行に固定された第2平面上に、前記第1センサ群と同様の構成の第2センサ群が、前記第1平面の法線方向において前記第1センサ群と重なることなく離散的に配列されたセンサ部と、前記第1センサ群の第1測定値群、および、前記第2センサ群の第2測定値群に基づいて、前記対象物に起因する3次元磁場分布を求める演算部とを備える。
【0009】
請求項2に記載の発明は、請求項1に記載の磁場分布取得装置であって、前記演算部が、前記第1センサ群および前記第2センサ群のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、前記一方のセンサ群が配列される一方の平面上において、前記法線方向において他方のセンサ群と重なる位置における磁場を、新たな測定値群として求める補間演算部と、前記新たな測定値群と前記他方のセンサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部とを備える。
【0010】
請求項3に記載の発明は、請求項1に記載の磁場分布取得装置であって、前記センサ部において、前記第1センサ群の配列と前記第2センサ群の配列とが同様であり、前記磁場分布取得装置が、前記センサ部を前記第1平面に沿う方向に前記対象物に対して相対的に移動する移動機構と、前記センサ部にて一の測定を行った後、前記移動機構により前記センサ部を前記対象物に対して相対的に移動して、前記一の測定時における前記第2センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第1平面上の相対位置に前記第1センサ群を配置するとともに、前記一の測定時における前記第1センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第2平面上の相対位置に前記第2センサ群を配置し、他の測定を行う制御部とをさらに備え、前記演算部が、前記一の測定および前記他の測定における前記第1センサ群の測定値群と、前記一の測定および前記他の測定における前記第2センサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部を備える。
【0011】
請求項4に記載の発明は、請求項2または3に記載の磁場分布取得装置であって、前記演算部にて求められる3次元磁場分布が、ラプラス方程式を満たすとともにφ(x,y,z)(ただし、前記第1平面および前記第2平面に平行かつ互いに垂直な2方向をX,Y方向とし、前記法線方向をZ方向として、x,y,zはX,Y,Z方向にて規定される直交座標系の座標パラメータを示す。)にて表され、前記第1平面または前記第2平面がz=0を満たす測定面であり、前記演算部が、前記測定面における測定値群であるφ(x,y,0)および前記微分測定値群であるφz(x,y,0)をそれぞれx,yに関して2次元フーリエ変換してψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。)を求め、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をx,yに関してフーリエ変換したものを導くことにより、φ(x,y,z)を求める。
【0012】
請求項5に記載の発明は、請求項4に記載の磁場分布取得装置であって、前記演算部が、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値を求め、前記相違を示す値が所定値以下となるzの値を、磁場の発生源のZ方向の位置として特定する。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の磁場分布取得装置であって、前記第1センサ群および前記第2センサ群に含まれる各センサが、薄膜素子である。
【発明の効果】
【0014】
本発明によれば、対象物との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行うことができ、3次元磁場分布を高精度に取得することができる。
【0015】
また、請求項2および3の発明では、微分測定値群を精度よく求めることができ、請求項4の発明では、3次元磁場分布をより精度よく求めることができ、請求項5の発明では、磁場の発生源の位置を精度よく特定することができる。
【図面の簡単な説明】
【0016】
【図1.A】特定平面上に設置された電流経路が遠方に形成する2次元磁場分布(特定平面の法線方向成分)を示す図である。
【図1.B】特定平面上に設置された電流経路が遠方に形成する2次元磁場分布(特定平面の法線方向成分)を示す図である。
【図1.C】図1.Aおよび図1.Bの2次元磁場分布を基に再構成した2次元磁場分布を示す図である。
【図2】磁場分布取得装置の構成を示す図である。
【図3】センサ部を示す図である。
【図4】センサ部を示す断面図である。
【図5.A】製造途上のセンサ部を示す図である。
【図5.B】製造途上のセンサ部を示す図である。
【図5.C】製造途上のセンサ部を示す図である。
【図5.D】製造途上のセンサ部を示す図である。
【図5.E】製造途上のセンサ部を示す図である。
【図6】コンピュータの構成を示すブロック図である。
【図7】コンピュータが実現する機能構成を示すブロック図である。
【図8】磁場分布取得装置が3次元磁場分布を取得する処理の流れを示す図である。
【図9】センサ部を示す図である。
【図10】比較例のセンサ部を示す図である。
【図11】比較例のセンサ部を示す断面図である。
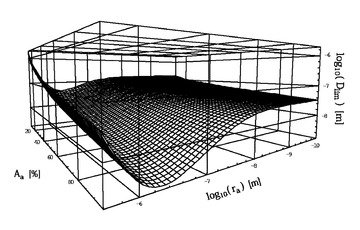
【図12】段差の最小限界値と、電流経路とセンサとの間のY方向の距離およびセンサの抵抗変化率の最大値との関係を示す図である。
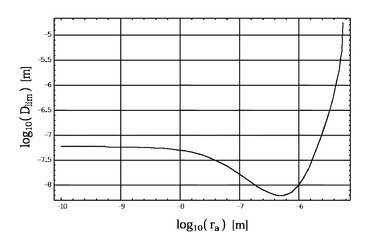
【図13】段差の最小限界値と、電流経路とセンサとの間のY方向の距離との関係を示す図である。
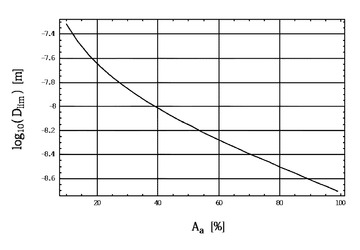
【図14】段差の最小限界値とセンサの抵抗変化率の最大値との関係を示す図である。
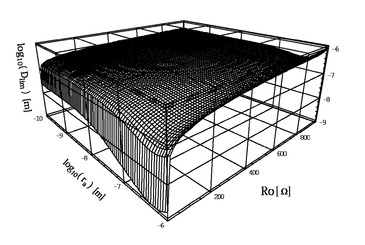
【図15】段差の最小限界値と、電流経路とセンサとの間のY方向の距離および素子抵抗との関係を示す図である。
【図16】段差の最小限界値と素子抵抗との関係を示す図である。
【図17】センサ部の他の例を示す図である。
【図18】関連技術に係る2次元場分布取得方法の原理を説明するための図である。
【図19】センサ部の他の例を示す図である。
【図20】センサ部の他の例を示す断面図である。
【図21】他の比較例のセンサ部を示す図である。
【図22】他の比較例のセンサ部を示す断面図である。
【図23】センサ部の他の例を示す図である。
【図24】センサ部の他の例を示す断面図である。
【図25】センサ部の他の例を示す図である。
【図26】センサ部の他の例を示す断面図である。
【図27】他の比較例のセンサ部を示す図である。
【図28】他の比較例のセンサ部を示す断面図である。
【図29】他の比較例のセンサ部を示す図である。
【図30】他の比較例のセンサ部を示す断面図である。
【図31】センサ部の他の例を示す図である。
【図32】磁場分布取得装置の他の例を示す図である。
【図33】両眼立体視を行う様子を示す図である。
【発明を実施するための形態】
【0017】
まず、本発明に係る磁場分布取得方法の原理について説明する。Eを電場の強度、Bを磁束密度、Hを磁場の強度、Dを電束密度、iを電流密度、ρを電荷密度、tを時間として、マクスウェルの基礎方程式は数1にて表される。
【0018】
【数1】

【0019】
σを導電率として、iはσEと表すことができ、さらに、E=E’ejωt、B=B’ejωt、H=H’ejωt、D=D’ejωt(ただし、E’、B’、H’、D’は振幅を表し、jは虚数であり、ωは角振動数である。)とおくと、数1は数2にて表される。
【0020】
【数2】
【0021】
誘電率をεとして、D’はεE’と表すことができるため、数2の上から2番目の式は数3にて表され、さらに、数4に変形可能である。
【0022】
【数3】
【0023】
【数4】
【0024】
透磁率をμとして、B’はμH’と表すことができ、B’=μH’および数2の最も上の式より、数4は数5にて表される。
【0025】
【数5】
【0026】
ここで、ナブラ∇およびラプラシアンΔを用いて数6が成り立つ。
【0027】
【数6】
【0028】
また、数2の最下段の式からdivH’は0となり、数6中の∇・H’は0となるため、数5は数7にて表される。
【0029】
【数7】
【0030】
数7においてωが十分に小さいときには、ΔH’は0となり、H’にて表される磁場はラプラス方程式を満たす。
【0031】
本磁場分布取得方法では、測定の対象物は互いに垂直なX,Y,Z方向にて規定される直交座標系に配置されており、H’はX方向、Y方向およびZ方向のそれぞれの成分を有している。後述のセンサ部では、予め定められた方向(当該方向におよそ沿う方向であってもよく、以下、「検出方向」という。)の磁場(ベクトル)の成分が検出されるため、磁場H’の検出方向成分(以下、単に「磁場」ともいう。)の3次元分布(以下、「3次元磁場分布」ともいう。)が測定対象の場の分布についての関数とされ、以下、φ(x,y,z)(ただし、x,y,zはX,Y,Z方向の座標パラメータを示す。)と表す。
【0032】
既述のように、φ(x,y,z)はラプラシアンΔを用いて数8にて表される。
【0033】
【数8】
【0034】
よって、国際公開第2008/123432号パンフレット(特許文献2)と同様の手法により3次元磁場分布の取得に係る式が導かれる。具体的には、数8の方程式の一般解は、X、Y、Z直交座標系においてZ方向に指数関数的に減衰する項と指数関数的に増大する項との和として数9にて表すことができる。
【0035】
【数9】
【0036】
ただし、数9において、kx,kyはX方向およびY方向の波数であり、A(k),B(k)はkx,kyで表される関数である。さらに、数9の両辺をzで1回微分したものは数10にて表される。数10では、φ(x,y,z)をzで1回微分したものをφz(x,y,z)と表している。
【0037】
【数10】
【0038】
ここで、z=0を満たすXY平面に平行な面におけるφ(x,y,z)、すなわち、φ(x,y,0)は数11にて表される。
【0039】
【数11】
【0040】
同様に、数10にz=0を代入することによりφz(x,y,0)は数12にて表される。
【0041】
【数12】
【0042】
φ(x,y,0)とφz(x,y,0)とをそれぞれフーリエ変換したψ(kx,ky)およびψz(kx,ky)(以下、ψ(k)およびψz(k)と表す。)は、それぞれA(k)+B(k)および|k|(A(k)−B(k))にて表される。したがって、A(k)およびB(k)のそれぞれをψ(k)およびψz(k)を用いて表すことができ、これらを数9に代入することにより数13が導かれる。
【0043】
【数13】
【0044】
以上のことから、対象物の外部に設定されたz=0を満たす測定面における測定によりディリクレ型境界条件であるφ(x,y,0)、および、ノイマン型境界条件であるφz(x,y,0)が得られる場合、これらをフーリエ変換することによって数13に示すようにφ(x,y,z)をxおよびyに関してフーリエ変換したものを導くとともに逆フーリエ変換を行うことにより、φ(x,y,z)を取得することができ、3次元磁場分布が厳密に導かれることとなる。
【0045】
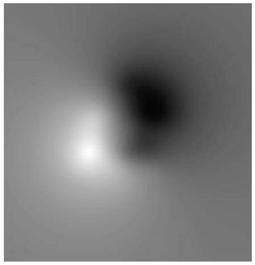
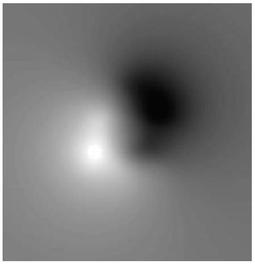
図1.Aおよび図1.Bはラプラス方程式を満たす磁場の一例を示す図であり、「神」の字状の経路に電流を流した場合に周囲に形成される磁場を、コンピュータにより求めた結果を示している。上記電流経路はXY平面に平行な所定の面上に存在し、図1.Aおよび図1.Bは、この面からZ方向に4.25μm(マイクロメートル)、4.75μm離れた面における磁場をそれぞれ示している。図1.Cは、図1.Aおよび図1.Bの2つの2次元磁場分布画像を用いて、数13により3次元磁場分布を再構成して、上記電流経路からZ方向に0.25μm離れた座標の2次元磁場分布を表示したものである。なお、図1.Cでは、参考のため、白い線にて「神」の字を記している。
【0046】
数13により再構成された図1.Cに示すように、電流経路に近接する面における磁場では、電流経路の形状を判別することができるが、図1.Aおよび図1.Bに示すように、電流経路から離れた面では、電流経路の形状は明瞭ではなくなる。ところが、例えば、図1.Bに示す磁場の面がz=0を満たす測定面であると想定し、上述のφ(x,y,0)およびφz(x,y,0)が測定により取得される場合、本発明に係る磁場分布取得方法を用いることにより、任意のzの値におけるφ(x,y,z)を求めることが可能となり、電流経路が対象物内に形成されている場合等により直接測定が不可能な面(図1.Cに示す磁場の面)における磁場分布を再現することが実現される。なお、上記原理はφ(x,y,z)がラプラス方程式を満たす範囲内で成立し、この範囲で磁場分布を求めることができる。
【0047】
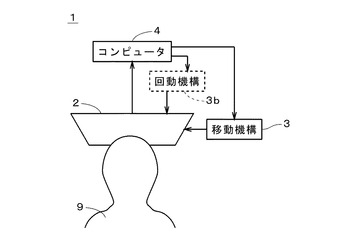
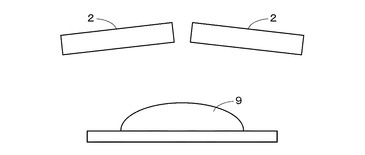
次に、上記磁場分布取得方法を用いる磁場分布取得装置について説明する。図2は、磁場分布取得装置1の構成を示す図である。磁場分布取得装置1は、対象物9(例えば、人体)に由来する磁場分布を測定する複数のセンサを有する平面状のセンサ部2、センサ部2をその主面に沿って移動する移動機構3、および、磁場分布取得装置1の各構成要素の制御を担う制御部であるコンピュータ4を備える。なお、図2において破線の矩形にて示す回動機構3bは、後述の処理例にて用いられるものであり、本処理例では用いられない。
【0048】
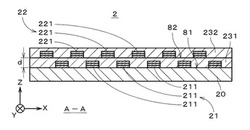
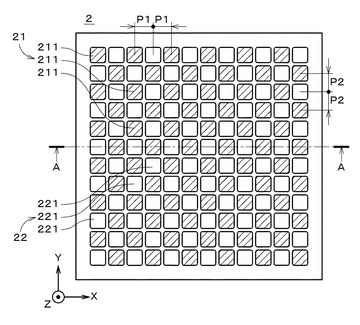
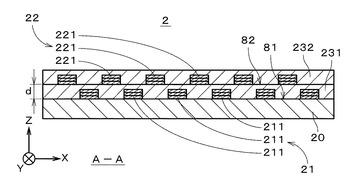
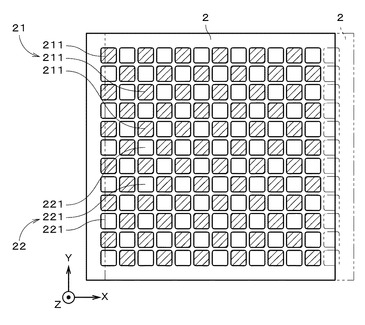
図3は、対象物9側から見たセンサ部2を示す図であり、図4は、図3中の矢印A−Aの位置におけるセンサ部2の断面図である。図4に示すように、センサ部2は板状の基材20を有し、トンネル磁気抵抗(TMR (Tunneling Magneto Resistance))効果を利用した薄膜素子である複数の第1センサ211が基材20の主面上に形成される。複数の第1センサ211は絶縁材料231にて覆われており、表面が平坦化された絶縁材料231上に、第1センサ211と同様のTMR素子である複数の第2センサ221が形成される。複数の第2センサ221も、第1センサ211と同様に、絶縁材料232にて覆われる。
【0049】
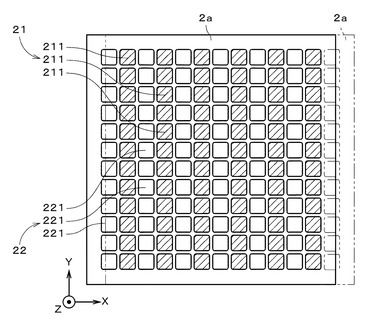
図3では、絶縁材料231,232内の第1センサ211および第2センサ221を実線にて図示するとともに、第1センサ211に平行斜線を付しており(後述の図9、図17、図19、図23および図25において同様)、第1センサ211、および、第2センサ221は図3中のX方向およびY方向に交互に(すなわち、市松模様状に)配置される。また、互いに隣接する第1センサ211と第2センサ221との間のX方向およびY方向の中心間距離(以下、「配列ピッチ」という。)は、それぞれP1およびP2にて一定である。以下の説明では、複数の第1センサ211の集合を第1センサ群21と呼び、複数の第2センサ221の集合を第2センサ群22と呼ぶ。図3では、144個のセンサ211,221が配列されるが、実際のセンサ部2では、多数のセンサ211,221が配列される。
【0050】
ここで、基材20の主面(図4中の(+Z)側の主面)を含む平面を第1平面81、平坦化された絶縁材料231の主面(図4中の(+Z)側の主面)を含む平面を第2平面82と呼ぶと、センサ部2では、図3および図4に示すように、第1センサ群21が対象物9に対向する第1平面81上に離散的に配列される。また、第1平面81から対象物9側((+Z)側)に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向(すなわち、Z方向)において第1センサ群21と重なることなく離散的に配列される。なお、第1平面81および第2平面82はX方向およびY方向に平行である。
【0051】
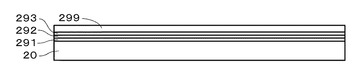
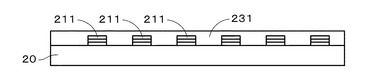
センサ部2を製造する際には、図5.Aに示すように、基材20上に強磁性金属層291、絶縁体層292、強磁性金属層293が順に形成され、図5.Bに示すように、これらの層291〜293上にネガ型の感光材料(フォトレジスト)の膜299が形成される。続いて、第1センサ群21の複数の第1センサ211に対応する膜299上の領域に(感光材料がポジ型である場合には、当該領域以外に)光が照射され、現像処理を行うことにより、図5.Cに示すように、複数の第1センサ211に対応する感光材料のパターンが形成される。そして、プラズマエッチング処理が行われた後、感光材料が除去されることにより、図5.Dに示すように、基材20上に複数の第1センサ211が形成される。
【0052】
基材20上には、絶縁材料が付与され、その表面が研磨されて平坦化されることにより、図5.Eに示すように、絶縁材料(の層)231が形成される。絶縁材料231上において上記処理が繰り返されることにより、第1センサ群21、絶縁材料231、第2センサ群22および絶縁材料232が形成された図4のセンサ部2が完成する。実際には、各センサ211,221には、導電性の引出線が形成される。なお、強磁性金属層291,293の一方がピン層であり、他方がソフト層である。
【0053】
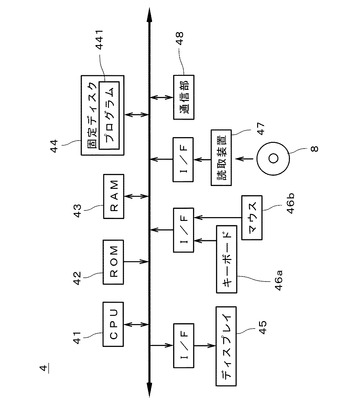
コンピュータ4は、図6に示すように、各種演算を行うCPU41、基本プログラムを記憶するROM42および各種情報を記憶するRAM43をバスラインに接続した一般的なコンピュータシステムとなっている。バスラインにはさらに、情報記憶を行う固定ディスク44、各種情報の表示を行うディスプレイ45、操作者からの入力を受け付けるキーボード46aおよびマウス46b、光ディスク、磁気ディスク、光磁気ディスク等のコンピュータ読み取り可能な記録媒体8から情報の読み取りを行う読取装置47、並びに、移動機構3に制御信号を送り出したり、センサ部2からの信号が入力される通信部48が、適宜、インターフェイス(I/F)を介する等して接続される。
【0054】
コンピュータ4には、事前に読取装置47を介して記録媒体8からプログラム441が読み出され、固定ディスク44に記憶される。そして、プログラム441がRAM43にコピーされるとともにCPU41がRAM43内のプログラムに従って演算処理を実行することにより(すなわち、コンピュータ4がプログラムを実行することにより)、後述する演算部としての機能が実現される。
【0055】
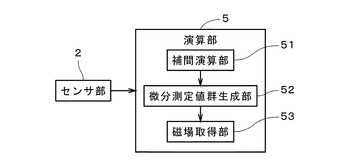
図7は、CPU41がプログラム441に従って動作することにより、CPU41、ROM42、RAM43、固定ディスク44等が実現する機能構成を示すブロック図である。図7において補間演算部51、微分測定値群生成部52および磁場取得部53を含む演算部5がCPU41等により実現される機能を示す。なお、補間演算部51は後述の処理にて用いられる機能である。これらの機能は専用の電気的回路により実現されてもよく、部分的に専用の電気的回路が用いられてもよい。また、複数のコンピュータにより実現されてもよい。
【0056】
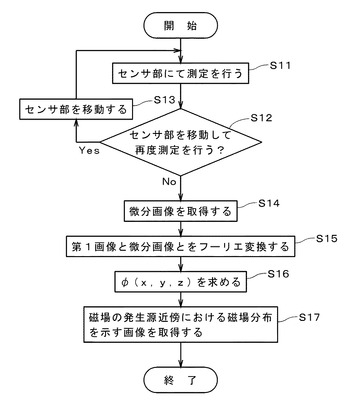
図8は磁場分布取得装置1が3次元磁場分布を取得する処理の流れを示す図である。図2の磁場分布取得装置1では、まず、センサ部2に対向する位置に対象物9が配置され、図3のセンサ部2の第1センサ群21および第2センサ群22にて同時に磁場分布が測定される(ステップS11)。既述のように、各センサ211,221は、基材20の主面に沿って広がる2つの強磁性金属層の間に絶縁体層を挟んだ構造であり、センサ211,221では、XY平面に沿う方向、例えばX方向の磁場が検出される(すなわち、検出方向はX方向である。)。第1センサ群21および第2センサ群22にて取得された検出方向の磁場(以下、単に「磁場」ともいう。)は、演算部5に出力される。
【0057】
続いて、センサ部2を移動することが確認された後(ステップS12)、移動機構3によりセンサ部2がX方向に配列ピッチP1に等しい距離だけ移動される(ステップS13)。図9では、移動前のセンサ部2を二点鎖線にて示し、移動後のセンサ部2を実線にて示している。第1平面81上における第1センサ群21の配列と、第2平面82上における第2センサ群22の配列とが同様であるため、移動後のセンサ部2では、直前の測定時における第2センサ群22の位置とZ方向に重なる第1平面81上の位置に第1センサ群21が配置されるとともに、直前の測定時における第1センサ群21の位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される(ただし、図9中の最も左側((−X)側)にてY方向に並ぶ複数のセンサ211,221を除く。)。
【0058】
そして、第1センサ群21および第2センサ群22にて検出方向の磁場が一斉に測定され、演算部5に出力される(ステップS11)。2度繰り返されたステップS11における2回の測定により、図9の移動後のセンサ部2において、最も左側にてY方向に並ぶ複数のセンサ211,221を除く全てのセンサ211,221のXおよびY方向の位置にて、第1平面81上の磁場および第2平面82上の磁場が取得される。
【0059】
微分測定値群生成部52では、第1平面81をz=0を満たす測定面として、2回のステップS11における第1センサ群21の測定値群から、φ(x,y,0)が取得される。本実施の形態では、測定面81上の各位置におけるφ(x,y,0)の値(磁場)が画素値に変換され、測定面81における磁場の2次元分布が第1画像(正確には画像のデータ)として取得される。同様に、2回のステップS11における第2センサ群22の測定値群から、第2平面82における磁場の分布(すなわち、φ(x,y,d))が第2画像として取得される。
【0060】
第1および第2画像が準備されると、これらの画像の差分画像が求められ、当該差分画像を微小距離d(第1平面81と第2平面82との間の距離)で除算した微分画像が生成される。微分画像は測定面81における磁場のZ方向の微分、すなわち、磁場の勾配を実質的に示す画像となる(ステップS14)。既述のように、第1画像はφ(x,y,0)にて表される。また、磁場の勾配は磁場をzにて微分したものであることから、磁場の勾配を示す微分画像はφz(x,y,0)を示す画像となる。
【0061】
2回のステップS11における測定にて第1センサ群21により取得される測定値群を第1測定値群とし、第2センサ群22により取得される測定値群を第2測定値群とした場合、上記ステップS11〜S14の処理は、磁場の2次元分布(以下、「磁場分布」ともいう。)を示す第1測定値群および第2測定値群を取得し、第1測定値群と第2測定値群との差分測定値群を求め、さらに、差分測定値群を微小距離dで除算して微分測定値群を取得する工程となっている。
【0062】
続いて、磁場取得部53では、φ(x,y,0)である第1画像およびφz(x,y,0)である微分画像が、xおよびyに関して2次元フーリエ変換されてψ(k)およびψz(k)(すなわち、ψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。))が求められる(ステップS15)。フーリエ変換として具体的には2次元の離散フーリエ変換が行われ、フーリエ変換に際して、例えば、0〜πの範囲の正弦関数のM乗(Mは0以上)を窓関数として両画像に掛ける手法が採用される。
【0063】
ψ(k)およびψz(k)が求められると、ψ(k)およびψz(k)を用いて、数13で示される式(以下、「3次元磁場分布取得式」と呼ぶ。)によりφ(x,y,z)が求められる(ステップS16)。なお、ψ(k)およびψz(k)を3次元磁場分布取得式に代入してkに関して逆フーリエ変換する際には、フーリエ変換時と同様の窓関数が利用される。φ(x,y,z)が求められることにより、磁場の3次元分布(3次元磁場分布)が厳密に求められることとなる。
【0064】
続いて、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値(以下、「評価値」という。)が求められる。本実施の形態では、iは1であり、φ(x,y,zn)とφ(x,y,zn−1)との差の総和や、相互相関(類似性を示す他の値であってもよい。)等が、両者の相違が大きいほど値が高くなる評価値として用いられる。そして、評価値が所定値以下となるzの値hが求められ、磁場の発生源のZ方向の位置(およその位置)として特定される。磁場の発生源は、対象物9の表面または内部となる。磁場分布取得装置1ではφ(x,y,h)を示す画像が磁場の発生源(近傍)における磁場分布を示す画像として固定ディスク44に保存される(ステップS17)。磁場の発生源における磁場分布は、磁場の発生源の状態と対応しているため、以上の動作により、磁場の発生源が対象物内である場合等であっても、磁場の発生源の状態を得ることができる。
【0065】
ここで、1つのセンサを対象物に対してX方向およびY方向に移動して磁場分布を取得する比較例の測定について述べる。比較例の測定手法を用いて磁場を取得する場合には、一の測定面上にてセンサをX方向およびY方向に移動して磁場分布を取得した後に、当該測定面からZ方向に微小距離だけ離れた他の測定面にて同様の測定が行われるため、測定に長時間を要してしまう。したがって、周囲温度の変化による対象物の熱膨張や、対象物が生物である場合における当該対象物の動き等により、2つの測定面にて取得される2つの磁場分布において、Z方向に重なる2つの位置が対応する対象物上の部位が相違してしまう。この場合、微分画像を精度よく取得することができず、3次元磁場を高精度に取得することが困難となる。また、1つのセンサを対象物に対してX方向およびZ方向に移動して、異なる高さで2点または2点以上の座標で磁場データを取得後、Y方向に1画素分位置を変える動作を繰り返す方法においても、上記の同様またはそれ以上のデータ量を取得することが可能となるが、この場合は、2枚の画像データのXY座標の位置はセンサと試料の相対位置の経時変化があったとしても保障されるが、Z座標の信頼性は低い。
【0066】
これに対し、磁場分布取得装置1のセンサ部2では、第1センサ群21が対象物9に対向する第1平面81上に離散的に配列されるとともに、第1平面81から対象物9側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向において第1センサ群21と重なることなく離散的に配列される。これにより、磁場分布取得装置1では、対象物9との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行うことができる。その結果、第1センサ群21の第1測定値群、および、第2センサ群22の第2測定値群に基づいて、対象物9に起因する3次元磁場分布を高精度に取得することが実現される。
【0067】
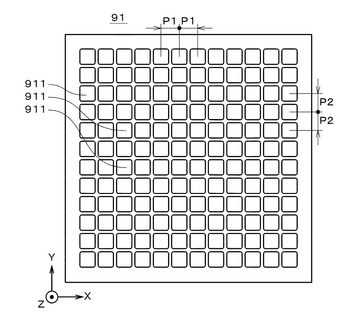
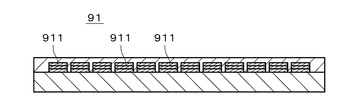
ところで、図10および図11に示すように、複数のセンサ911が同一平面上においてX方向およびY方向に配列ピッチP1,P2にて配列される他の比較例のセンサ部91を想定した場合、このようなセンサ部91では、X方向およびY方向におけるセンサ911間の距離が狭くなり、センサ部91の製造が容易ではない。これに対し、図4のセンサ部2では、第1センサ群21が第1平面81上に形成され、第2センサ群22が第2平面82上に形成されることにより、第1平面81および第2平面82のそれぞれにおいて、X方向およびY方向におけるセンサ間の距離を、比較例のセンサ部91に比べて広くすることができ、センサ部2を容易に製造することができる。なお、半導体製造プロセスと同様の手法にて作製される図4のセンサ部2の場合、第1平面81および第2平面82のセンサの位置を高精度に位置合わせすることが容易に可能である。
【0068】
演算部5では、測定面81における測定値群であるφ(x,y,0)および微分測定値群であるφz(x,y,0)をそれぞれフーリエ変換してψ(kx,ky)およびψz(kx,ky)が求められ、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をフーリエ変換したものを導くことにより、φ(x,y,z)が求められる。これにより、3次元磁場分布をより精度よく求めることができる。
【0069】
また、磁場分布取得装置1では、センサ部2にて一の測定を行った後、移動機構3がセンサ部2を第1平面81に沿う方向に移動することにより、Z方向に関して当該一の測定時における第2センサ群22の位置と重なる第1平面81上の位置に第1センサ群21が配置されるとともに、当該一の測定時における第1センサ群21の位置と重なる第2平面82上の位置に第2センサ群22が配置され、他の測定が行われる。そして、当該一の測定および当該他の測定における第1センサ群21の測定値群と、当該一の測定および当該他の測定における第2センサ群22の測定値群との差分測定値群が求められ、差分測定値群を微小距離dで除算して微分測定値群が取得される。これにより、微分測定値群を精度よく求めることができ、3次元磁場分布をさらに精度よく求めることができる。
【0070】
さらに、演算部5では、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−1)(ただし、nは2以上の整数)との間の相違を示す評価値が求められ、評価値が所定値以下となるzの値が磁場の発生源のZ方向の位置として特定される。これにより、磁場の発生源の位置を精度よく特定することができる。
【0071】
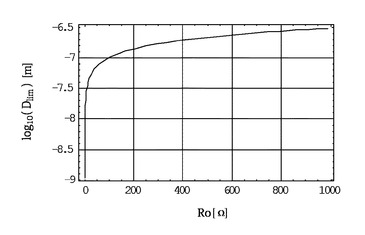
ここで、センサ部2における第1平面81と第2平面82との間の微小距離d(すなわち、第1センサ211と第2センサ221との段差)の最小限界値について述べる。TMR素子である各センサ211,221では、その素子抵抗に由来するジョンソンノイズに基づいて、第1センサ211と第2センサ221との段差の最小限界値Dlim[m]が数14のように表される。数14では、対象物9における長さlx[m]の電流経路(X方向にのみ伸びる電流経路)の存在を仮定しており、当該電流経路に流れる電流値をI[A]としている。また、X方向に関して当該電流経路の一端と同位置となるセンサと、当該電流経路の一端との間のY方向の距離をra[m]、Z方向の距離をrb[m]としている。なお、μは透磁率であり、Aaはセンサの抵抗変化率の最大値[%]であり、v0はセンサに対する印加電圧値[V]であり、R0は磁場が作用していない状態における素子抵抗[Ω]であり、kはボルツマン定数であり、Bはノイズの帯域幅[Hz]であり、Tはセンサの温度[K]である。また、センサの抵抗変化率[%]が(Aa/2)となる際の抵抗変化率の磁場Hに対する傾きが(Aa/Hw)である場合に、BwはμHwとして求められる。
【0072】
【数14】
【0073】
図12は、段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raおよびセンサの抵抗変化率の最大値Aaとの関係を示す図である。ここでは、電流値Iは1.0[μA]であり、電流経路長lxは10[nm]であり、電流経路とセンサとの間のZ方向の距離rb(すなわち、電流経路が形成される面と測定面との間の距離)は1.0[μm]であり、素子抵抗R0は0.40[Ω](ここでは、単位面積あたりの抵抗を0.40[Ω/μm2]、素子の面積を1[μm2]とする。)であり、Hwは5.0×10−2[T]であり、ノイズの帯域幅Bは1.0[Hz]であり、センサの温度Tは300[K]である。また、図13はセンサの抵抗変化率の最大値Aaが50[%]である場合における段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raとの関係を示す図であり、図14は電流経路とセンサとの間のY方向の距離raが0.32[μm]である場合における段差の最小限界値Dlimとセンサの抵抗変化率の最大値Aaとの関係を示す図である。
【0074】
図15は、段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raおよび素子抵抗R0との関係を示す図である。図15では、センサの抵抗変化率の最大値Aaが50[%]である点を除き、各条件は図12と同じである。図16は、電流経路とセンサとの間のY方向の距離raが0.32[μm]である場合における段差の最小限界値Dlimと素子抵抗R0との関係を示す図である。
【0075】
例えば、電流値Iが1.0[μA]であり、電流経路長lxが10[nm]であり、電流経路とセンサとの間のZ方向の距離rbが1.0[μm]であり、電流経路とセンサとの間のY方向の距離raが3.2[μm]であり、センサの素子抵抗R0が0.40[Ω]であり、抵抗変化率の最大値Aaが50[%]であり、Hwが5.0×10−2[T]であり、ノイズの帯域幅Bが1.0[Hz]であり、センサの温度Tが300[K]である場合には、段差の最小限界値Dlimは260[nm]となる。なお、段差の最大限界値については、センサ部2と対象物9との間の距離、電流値に応じて適宜決定される。
【0076】
次に、磁場分布取得装置1における他の処理例について述べる。ここでは、第1平面81における第1センサ211のX方向およびY方向のピッチをPX,PYとし、第2平面82における第2センサ221のX方向およびY方向のピッチもPX,PYとして、第1平面81上に配置される第1センサ211のX方向およびY方向の座標が(nPX,mPY)として表され(ただし、nおよびmは0以上の整数)、第2平面82上に配置される第2センサ221のX方向およびY方向の座標が((n+1/2)PX,(m+1/2)PY)として表されるものとする。また、本処理例では、図7の補間演算部51が用いられる。
【0077】
磁場分布取得装置1では、センサ部2の第1センサ群21および第2センサ群22にて磁場が測定されると(ステップS11)、センサ部2の移動を行うことなく、磁場の勾配を示す微分画像φz(x,y,0)が取得される(ステップS12,S14)。
【0078】
具体的には、既述のように第1平面81(測定面)上に配置される第1センサ211のX方向およびY方向の座標が(nPX,mPY)として表されるため、補間演算部51では、第1センサ211により取得される測定値群φ(x,y,0)が、数15にて表される。
【0079】
【数15】
【0080】
同様に、第2センサ221により取得される測定値群φ(x,y,d)は、数16にて表される。
【0081】
【数16】
【0082】
このとき、第2平面82上において第1センサ211とZ方向に重なる位置、すなわち、X方向およびY方向の座標が(nPX,mPY)として表される位置における磁場の値φ(nPX,mPY,d)は数17のように近似することができる。
【0083】
【数17】
【0084】
すなわち、数17では、第2センサ群22の測定値群に対して補間演算を行って、第2平面82上において、複数の第1センサ211に対向する位置(第2センサ221が配置されていない位置であり、座標(nPX,mPY)にて表される位置)における新たな測定値群が求められる。なお、数17では、隣接する2つの第2センサ221における測定値の平均値の算出(線形補間)が行われるが、他の種類の補間演算が行われてもよい。
【0085】
このようにして、第1平面81および第2平面82の双方において座標(nPX,mPY)にて表される位置の測定値が取得されると、微分測定値群生成部52では、数18に示すように、当該新たな測定値群と第1センサ群21の測定値群との差分測定値群を、第1平面81と第2平面82との間の微小距離dにて除算することにより、微分画像である微分測定値群φz(x,y,0)が求められる。
【0086】
【数18】
【0087】
微分画像φz(x,y,0)が求められると、上記処理例と同様にしてφ(x,y,0)およびφz(x,y,0)が、xおよびyに関してフーリエ変換されてψ(kx,ky)およびψz(kx,ky)(すなわち、ψ(k)およびψz(k))が求められ(ステップS15)、ψ(kx,ky)およびψz(kx,ky)を用いて、3次元磁場分布取得式によりφ(x,y,z)が求められる(ステップS16)。そして、zの値を順次変更しつつ評価値が求められることにより、磁場の発生源のZ方向の位置が特定され、磁場の発生源における磁場分布を示す画像が取得される(ステップS17)。
【0088】
以上に説明したように、磁場分布取得装置1では、第2センサ群22の測定値群に対して補間演算を行うことにより、第2センサ群22が配列される第2平面82上において、Z方向において第1センサ群21と重なる位置における磁場が、新たな測定値群として求められる。そして、当該新たな測定値群と第1センサ群21の測定値群との差分測定値群を求め、当該差分測定値群を微小距離dで除算することにより、微分測定値群が取得される。これにより、磁場分布取得装置1では、センサ部2を移動することなく、微分測定値群を精度よく求めることができ、対象物9に起因する3次元磁場分布を高精度に求めることが可能となる。
【0089】
補間演算部51では、第1センサ群21の測定値群に対して補間演算を行うことにより、第1センサ群21が配列される第1平面81上において、センサ部2の法線方向において第2センサ群22と重なる位置における磁場が、新たな測定値群として求められてもよい。すなわち、第1センサ群21および第2センサ群22のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、当該一方のセンサ群が配列される一方の平面上において、センサ部2の法線方向において他方のセンサ群と重なる位置における磁場が、新たな測定値群として求められる。そして、当該新たな測定値群と当該他方のセンサ群の測定値群との差分測定値群を求め、差分測定値群を微小距離dで除算することにより、微分測定値群が取得される。また、第1センサ群21および第2センサ群22の双方の測定値群に対して補間演算を行うことにより、微分測定値群が高分解能にて求められてよい。
【0090】
磁場分布取得装置1における第1センサ211および第2センサ221の配列は様々に変更されてよく、例えば、図17に示すように、複数の第1センサ211がY方向に連続して並ぶ第1センサの列と、複数の第2センサ221がY方向に連続して並ぶ第2センサの列とがX方向に交互に配列されてもよい。
【0091】
図17のセンサ部2aにおいて、φ(x,y,0)およびφz(x,y,0)を取得する際には、一の測定を行った後(図8:ステップS11)、移動機構3によりセンサ部2aが僅かに移動され、当該一の測定時における第2センサ群22の位置(図17中にて実線にて示す。)とZ方向に重なる第1平面81上の位置に第1センサ群21が配置されるとともに、当該一の測定時における第1センサ群21の位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される(図17中にて二点鎖線にて示すセンサ部2a参照)(ステップS12,S13)。センサ部2aでは、次の測定が行われることにより(ステップS11)、φ(x,y,0)およびφ(x,y,d)が取得され、微分測定値群生成部52により、φz(x,y,0)が求められる(ステップS12,S14)。これにより、対象物9に起因する3次元磁場分布を高精度に求めることが可能となる。もちろん、図17のセンサ部2aにおいて、補間演算を行うことにより、センサ部2aを移動することなく、微分測定値群が精度よく求められてよい。
【0092】
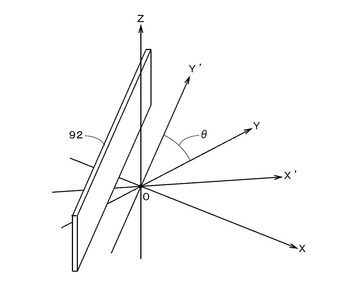
次に、本発明の関連技術に係る2次元場分布取得方法の原理について説明する。図18は、2次元場分布取得方法の原理を説明するための図である。図18では、互いに垂直なX,Y,Z方向にて規定される直交座標系を示している。図18中にて符号92を付す薄膜状のセンサは、z=α(ただし、αは任意の値)を満たす任意の測定面上において測定面に平行な方向に伸びる。
【0093】
以下の説明では、Y方向を基準方向、センサ92の長手方向をY’方向、測定面上において長手方向(Y’方向)に垂直な方向をX’方向、基準方向とY’方向とがなす角度(以下、「センサ角度」という。)をθ、X’方向およびY’方向の座標パラメータをx’およびy’(ただし、X’方向およびY’方向の原点はZ軸上であり、図18ではX,Y、Z方向にて規定される直交座標系の原点と同じである。)とする。
【0094】
関連技術に係る2次元場分布取得方法では、センサ92をX’方向に移動して測定面上の所定の領域(対象物上にて注目する領域を測定面上に投影した領域であり、以下、「測定対象領域」という。)を通過する走査が行われる。そして、走査時においてX’方向の各位置x’にてセンサ92の全体が受ける磁場(センサ92内を通過する磁力線の総和)を示す信号が生成され、測定値として取得される。実際には、センサ角度θを0°以上180°未満の範囲内にて複数通りに変更しつつ、測定面上において長手方向に垂直な方向への走査が繰り返され、3次元場に由来する測定値を示す関数f(x’,θ)(以下、単に「測定値f(x’,θ)」という。)が、x’およびθをパラメータとして取得される。なお、Z軸は、測定対象領域のおよそ中央を通過するものとする。
【0095】
ここで、Z方向に沿って見た場合に、X’Y’座標系は、XY座標系をZ軸を中心としてセンサ角度θだけ回転させたものであるため、数19が満たされる。
【0096】
【数19】
【0097】
また、既述のように、センサ92をX’方向に移動する各走査時には、センサ92の全体が受ける磁場が取得されるため、測定値f(x’,θ)は数20にて表される。なお、センサ92の長手方向(Y’方向)に関して、センサ92は測定対象領域の幅に比べて十分に長くなるように設定されている。
【0098】
【数20】
【0099】
ここで、φ(x,y,α)をX方向およびY方向にフーリエ変換したψ(kx,ky)|z=α(以下、単にψ(kx,ky)と表す。)は数21のように表される。ただし、数21において、kx,kyはX方向およびY方向の波数である。
【0100】
【数21】
【0101】
数21において、(kx=kx’cosθ)、(ky=kx’sinθ)、(x’=xcosθ+ysinθ)とおくと、数22が得られる。ただし、数22において、kx’,ky’はX’方向およびY’方向の波数である。
【0102】
【数22】
【0103】
また、数22中の(dxdy)は数23にて表される。
【0104】
【数23】
【0105】
したがって、数22は、数19、数20および数23を用いて数24のように変形することができる。数24ではψ(kx’cosθ,kx’sinθ)をg(kx’,θ)と表している。
【0106】
【数24】
【0107】
一方で、φ(x,y,α)は数25のように表すことができる。ただし、(kx=kx’cosθ)、(ky=kx’sinθ)、(x’=xcosθ+ysinθ)とおいている。
【0108】
【数25】
【0109】
数25に数24のψ(kx’cosθ,kx’sinθ)を代入することにより、φ(x,y,α)は数26にて表される。
【0110】
【数26】
【0111】
以上のことから、基準方向とセンサ92の長手方向とがなす角度(すなわち、センサ角度)θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得し、さらに、測定値f(x’,θ)をx’に関してフーリエ変換したg(kx’,θ)を求めることにより、数26(以下、「2次元場分布取得式」と呼ぶ。)を用いてφ(x,y,α)を取得することができる。
【0112】
関連技術を用いて3次元の磁場分布を取得する際には、z=0を満たす測定面にてセンサ角度θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得することにより、第1画像であるφ(x,y,0)が求められる。続いて、z=dを満たす測定面にてセンサ角度θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得することにより、第2画像であるφ(x,y,d)が求められる。そして、第1画像および第2画像に基づいて、3次元の磁場が取得される。
【0113】
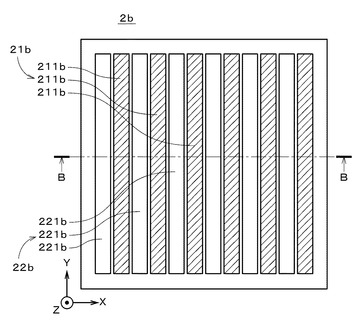
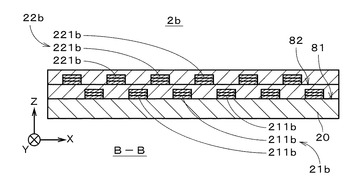
次に、磁場分布取得装置1において、上記関連技術を利用して3次元磁場分布を取得する手法について説明する。図19は対象物9側から見たセンサ部2bを示す図であり、図20は、図19中の矢印B−Bの位置におけるセンサ部2bの断面図である。図19および図20に示すセンサ部2bでは、TMR素子である各第1センサ211bがz=0を満たす第1平面81上において一の方向(以下、「長手方向」という。)に伸びており、複数の第1センサ211bが当該方向に垂直な配列方向に一定のピッチにて配列される。また、各第2センサ221bも同様にz=dを満たす第2平面82上において第1センサ211bに平行に伸びており、複数の第2センサ221bが配列方向に同じピッチにて配列される。センサ部2bを平面視した図19では、第1センサ211bおよび第2センサ221bが配列方向に一定の配列ピッチにて交互に配置される。本手法に係る磁場分布取得装置1では、図2中にて破線にて示す回動機構3bによりセンサ部2bがZ軸を中心として回動可能であり、上記関連技術と同様に、各センサ211b,221bの長手方向をY’方向、長手方向(Y’方向)に垂直な方向をX’方向、Y方向(基準方向)とY’方向とがなすセンサ角度をθとする。
【0114】
次に、図19のセンサ部2bを有する磁場分布取得装置1が3次元磁場分布を取得する処理の流れについて図8に準じて説明する。磁場分布取得装置1では、センサ部2bによる1回目の測定が行われ、各センサ211b,221bにて測定値が取得される(図8:ステップS11)。続いて、移動機構3によりセンサ部2bがX’方向に配列ピッチだけ移動され(ステップS12,S13)、1回目の測定時における第2センサ群22b(すなわち、複数の第2センサ221bの集合)の位置とZ方向に重なる第1平面81上の位置に第1センサ群21b(すなわち、複数の第1センサ211の集合)が配置されるとともに、1回目の測定時における第1センサ群21bの位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される。そして、2回目の測定が行われることにより、各センサ211b,221bにて測定値が取得される(ステップS11)。
【0115】
したがって、1回目および2回目の測定により、第1平面81上において長手方向に垂直なX’方向の各位置x’にて第1センサ211の全体が受ける磁場が取得され、第2平面82上において長手方向に垂直なX’方向の各位置x’にて第2センサ221の全体が受ける磁場が取得される。
【0116】
次の測定が行われることが確認されると(ステップS12)、回動機構3bがセンサ部2bを回動することにより、基準方向と各センサ211b,221bの長手方向(Y’方向)とがなすセンサ角度θが一定の微小角度(例えば、1度以上15度以下(好ましくは、10度以下であり、より好ましくは、5度以下)の角度)だけ変更される(ステップS13)。そして、上記と同様に、回動後のセンサ部2bにおける1回目の測定(ステップS11)、センサ部2bの移動(ステップS12,S13)、および、2回目の測定が行われる(ステップS11)。以下の説明では、一のセンサ角度θにおける1回目の測定、および、センサ部2bの配列ピッチ分の移動後における2回目の測定を、「センサ部2bの移動前後における測定」という。
【0117】
このように、磁場分布取得装置1では、コンピュータ4の制御により、回動機構3bがセンサ角度θを複数通りに変更しつつセンサ部2bの移動前後における測定が繰り返され、第1平面81および第2平面82のそれぞれにおいて、x’およびθをパラメータとする測定値f(x’,θ)が取得される。本実施の形態における複数のセンサ角度θは、0°以上180°未満の範囲内の一定間隔の角度である。
【0118】
各平面81,82において測定値f(x’,θ)が取得されると(ステップS12)、演算部5では、f(x’,θ)をx’に関してフーリエ変換することにより、g(kx’,θ)が取得される。そして、g(kx’,θ)を2次元場分布取得式(数26)に代入することにより、第1平面81における2次元場を示すφ(x,y,0)、および、第2平面82における2次元場を示すφ(x,y,d)(すなわち、第1画像および第2画像)が求められる。そして、これらの画像の差分画像が求められ、当該差分画像を微小距離dで除算した微分画像φz(x,y,0)が生成される(ステップS14)。
【0119】
微分画像φz(x,y,0)が求められると、上記処理例と同様にしてφ(x,y,0)およびφz(x,y,0)が、xおよびyに関してフーリエ変換されてψ(kx,ky)およびψz(kx,ky)(すなわち、ψ(k)およびψz(k))が求められ(ステップS15)、ψ(kx,ky)およびψz(kx,ky)を用いて、3次元磁場分布取得式によりφ(x,y,z)が求められる(ステップS16)。そして、zの値を順次変更しつつ評価値が求められることにより、磁場の発生源のZ方向の位置が特定され、磁場の発生源における磁場分布を示す画像が取得される(ステップS17)。
【0120】
以上に説明したように、図19のセンサ部2bを有する磁場分布取得装置1では、それぞれが長尺の第1センサ群21bが第1平面81上に間隔を空けて配列されるとともに、第1平面81から対象物9側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21bと同様の形状の第2センサ群22bが、第1平面81の法線方向において第1センサ群21bと重なることなく配列される。そして、センサ角度θを複数通りに変更しつつ、各センサ角度θにてセンサ部2bの移動前後における測定が行われることにより、第1センサ群21の第1測定値群であるφ(x,y,0)、および、第2センサ群22の第2測定値群であるφ(x,y,d)が取得される。これにより、上記関連技術のように2つの平面のそれぞれにおいて、各センサ角度θにてセンサ92を走査する場合に比べて、第1測定値群であるφ(x,y,0)、および、第2測定値群であるφ(x,y,d)を高速に、かつ、精度よく取得することができ、その結果、φ(x,y,0)およびφ(x,y,d)に基づいて、高精度な3次元磁場分布を短時間にて取得することができる。
【0121】
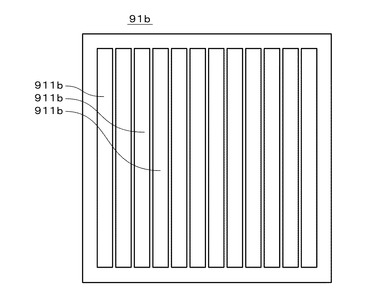
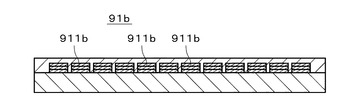
ここで、図21および図22に示すように、長尺の複数のセンサ911bが同一平面上において一定の配列ピッチにて配列される比較例のセンサ部91bを想定した場合、全てのセンサ911bが同一平面上に形成されるため、センサ911b間の距離が狭くなり、センサ部91bの製造が容易ではない。
【0122】
これに対し、センサ部2bでは、第1平面81および第2平面82のそれぞれにおいて、配列方向におけるセンサ間の距離が、比較例のセンサ部91bに比べて長くなるため、センサ部2bを容易に製造することができる。なお、図17のセンサ部2aにおいて、Y方向に並ぶ複数の第1センサ211を長尺の1つの第1センサとして捉え、Y方向に並ぶ複数の第2センサ221を長尺の1つの第2センサとして捉えて、上記と同様の手法により、3次元磁場が求められてもよい(後述の図23のセンサ部2cにおいて同様)。
【0123】
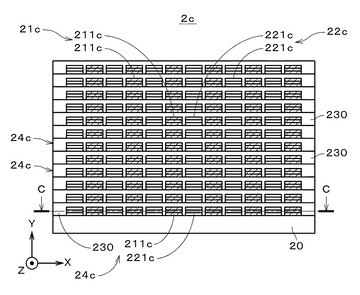
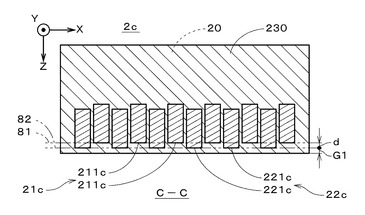
上記センサ部2,2a,2bでは、XY平面におよそ沿う方向の磁場が検出されるが、磁場の検出方向は他の方向であってもよい。図23および図24はセンサ部の他の例を示す図である。図23は、対象物9側から見たセンサ部2cを示す図であり、図24は、図23中の矢印C−Cの位置におけるセンサ部2cの断面図である。
【0124】
センサ部2cでは、図24に示すように、基材20上において複数の第1センサ211cおよび複数の第2センサ221cがX方向に沿って千鳥状に配列形成される。詳細には、複数の第1センサ211cの一端は、Z方向に垂直な第1平面81(図24中にて二点鎖線にて示す。第2平面82において同様。)上に配置され、複数の第2センサ221cの一端は、第1平面81から対象物9側に微小距離dだけ離れ、かつ、Z方向に垂直な第2平面82上に配置される。図23に示すように、センサ部2cでは、複数の第1センサ211cおよび複数の第2センサ221cは絶縁材料230にて覆われており、絶縁材料230の表面(基材20とは反対側の主面)は平坦化される。センサ部2cでは、複数の第1センサ211c、複数の第2センサ221cおよび絶縁材料230によりセンサ層24cが形成される。
【0125】
基材20上に形成されたセンサ層24cの絶縁材料230には、上記と同様にして、複数の第1センサ211cおよび第2センサ221cがX方向に沿って千鳥状に配列形成され、複数の第1センサ211cおよび複数の第2センサ221cが絶縁材料230にて覆われることにより、センサ層24cが形成される。センサ部2cでは、多数のセンサ層24cが積層されることにより、第1センサ群21cが第1平面81上に2次元配列されるとともに、第1センサ群21cと同様の構成の第2センサ群22cが、Z方向において第1センサ群21cと重なることなく第2平面82上に2次元配列される。また、各センサ211c,221cでは、ZX平面におよそ沿う方向の磁場が検出される。
【0126】
センサ部2cでは、X方向の分解能はセンサ211c,221cのX方向の配列ピッチにより決定され、Y方向の分解能はセンサ層24cの厚さにより決定される。実際のセンサ層24cの厚さは極めて薄いため、センサ部2cを有する磁場分布取得装置1では、対象物9との間において異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、高分解能(特に、センサ層24cの積層方向に高い分解能)にて行うことができる。なお、第1センサ211cの一端と、センサ部2cの検出面との間の距離(図24中にて符号G1を付す矢印にて示す距離)は可能な範囲で小さくされることが好ましい。
【0127】
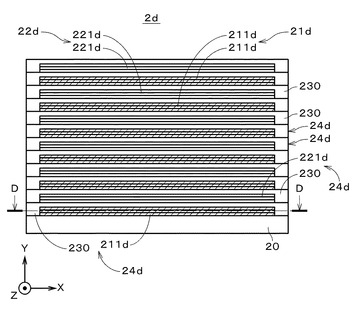
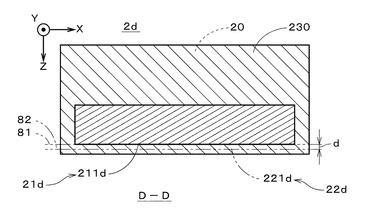
図25および図26はセンサ部のさらに他の例を示す図である。図25は、対象物9側から見たセンサ部2dを示す図であり、図26は、図25中の矢印D−Dの位置におけるセンサ部2dの断面図である。
【0128】
センサ部2dでは、図26に示すように、基材20上においてX方向に長い1つの第1センサ211dが形成される。第1センサ211dは、絶縁材料230にて覆われる。また、図25に示すように、絶縁材料230の表面(基材20とは反対側の主面)は平坦化され、第1センサ211dおよび絶縁材料230によりセンサ層24dが形成される。基材20上に形成されたセンサ層24dの絶縁材料230には、X方向に長い1つの第2センサ221dが形成され、絶縁材料230にて覆われる。これにより、第2センサ221dおよび絶縁材料230を含むセンサ層24dが形成される。実際には、第1センサ211dの側面は、Z方向に垂直な第1平面81(図26中にて二点鎖線にて示す。第2平面82において同様。)上に配置され、第2センサ221dの側面は、第1平面81から対象物9側に微小距離dだけ離れ、かつ、Z方向に垂直な第2平面82上に配置される。図25に示すように、センサ部2dでは、第1センサ211dを含むセンサ層24dと第2センサ221dを含むセンサ層24dとが交互に積層されることにより、第1平面81において第1センサ群21dが離散的に配列され、第2平面82において第2センサ群22dが離散的に配列される。
【0129】
センサ部2dを有する磁場分布取得装置では、図19のセンサ部2bを有する磁場分布取得装置と同様にして3次元磁場分布が取得される。これにより、対象物9との間において異なる2つの距離における磁場の2次元分布の測定を高速に行うことができる。また、第1平面81および第2平面82において、長手方向に垂直なX’方向の分解能がセンサ層24dの厚さにより決定されるため、磁場分布の測定を高分解能にて精度よく行うことができる。
【0130】
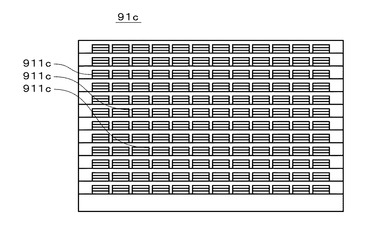
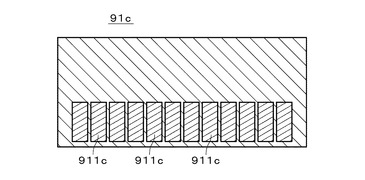
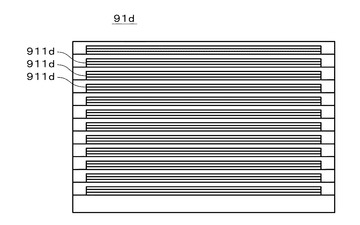
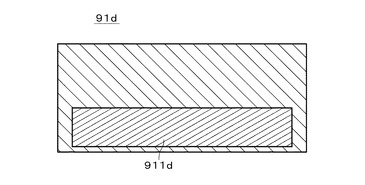
なお、図27および図28に示すセンサ部91cや、図29および図30に示すセンサ部91dのように、全てのセンサ911c,911dの一端(または側面)が同一平面上に配置されるセンサ部を比較例として想定した場合、比較例のセンサ部91c,91dを有する磁場分布取得装置では、センサ部91c,91dを第1平面から第2平面上に移動する機構が必要となるが、図23および図25のセンサ部2c,2dを有する磁場分布取得装置では、このような機構(すなわち、センサ部2c,2dをZ方向に移動する機構)が不要となる。
【0131】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0132】
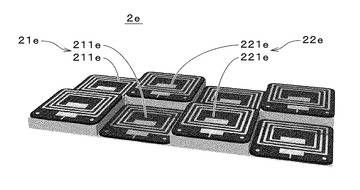
上記実施の形態では、TMR素子がセンサとして用いられるが、磁場を測定する他の種類のセンサが用いられてもよく、例えば、図31のセンサ部2eでは、SQUID素子(例えば、30〜50μm角の大きさの素子)が第1センサ211eおよび第2センサ221eとして用いられる。センサ部2eでは、第1センサ群21eが対象物に対向する第1平面上に離散的に配列されるとともに、第1平面から対象物側に微小距離(例えば、3〜5μm)だけ離れ、かつ、第1平面に対して平行に固定された第2平面上に、第1センサ群21eと同様の構成の第2センサ群22eが、第1平面の法線方向において第1センサ群21eと重なることなく離散的に配列される。これにより、2つの平面上における磁場分布の測定を高速に行うことができる。
【0133】
磁場分布取得装置1では、第2平面がz=0を満たす測定面とされてもよく、この場合でも、第1平面における測定値群と第2平面における測定値群とに基づいて生成される微分測定値群、および、第2平面における測定値群を用いて、対象物9に起因する3次元磁場を求めることができる。
【0134】
上記実施の形態におけるセンサ部では、センサ群が離散的に配列される2つの平面(第1平面および第2平面)が設定されるが、互いに平行に設定された3以上の平面のそれぞれにてセンサ群が離散的に配列されてもよい。この場合、一の平面に配列されるセンサ群は、他の平面に配列されるセンサ群と当該平面に垂直な方向において重ならない位置に配置される。このようなセンサ部では、実際に測定に利用する2つの平面上のセンサ群が選択され、センサ部の当該平面に平行な方向への移動、および、移動後の位置における測定が繰り返されて各平面上の各位置における測定値が取得される(もちろん、上述の補間演算が行われてもよい。)。センサ部においてセンサ群が配列される平面の個数をNとすると、NC2通りの平面の組合せを決定することができる。ただし、高精度な測定を高速に行うには、2つの平面のみがセンサ部に設定され、当該2つの平面のそれぞれにセンサ群が配列されることが好ましい。
【0135】
磁場分布取得装置1では、第1センサ群の第1測定値群、および、第2センサ群の第2測定値群に基づいて、対象物9に起因する3次元磁場が求められるのであれば、上記3次元磁場分布取得式以外の演算が用いられてよい。
【0136】
移動機構3は、センサ部の第1平面に沿う方向に対象物9を移動するものであってもよい。すなわち、移動機構は、センサ部を第1平面に沿う方向に対象物に対して相対的に移動するものであればよく、これにより、センサ部にて一の測定を行った後、移動機構によりセンサ部を対象物に対して相対的に移動して、当該一の測定時における第2センサ群の対象物に対する相対位置とZ方向に重なる第1平面上の相対位置に第1センサ群を配置するとともに、当該一の測定時における第1センサ群の対象物に対する相対位置とZ方向に重なる第2平面上の相対位置に第2センサ群を配置することが可能となる。
【0137】
上記磁場分布取得装置1は、例えば、電子線出射装置から出射される電子線のプロファイリングに用いることも可能である。電子線による一括露光を行う装置では、パターン情報に応じてONまたはOFFの状態となる多数の電子線要素の束(電子線)が電子線出射装置から出射され、電子光学系を介して対象物上に照射されるが、上記磁場分布取得装置1では、電子線により生成される3次元磁場分布を取得することにより、電子線のプロファイリングが実現される。また、上記磁場分布取得装置1は、各種電子部品や半導体製品の配線検査(製造途上におけるインライン検査を含む。)、ハードディスク駆動装置の検出器、あるいは、人体の脳磁場等を取得するMRI(Magnetic Resonance Imaging)装置等、様々な用途に用いることができる。
【0138】
また、図32に示すように、本発明に基づく2つのセンサ部2を対象物9に対して、互いのセンサ部2中心が一定距離離れた異なる位置に配置して、それぞれのセンサ部2が磁場発生源近傍の異なる2次元磁場分布を数13によりそれぞれ再構成する。再構成によって得られた2枚の画像を、図33に示すようにディスプレイ45により交互に表示し、表示に同期してメガネ49の右目、左目のシャッターを交互に駆動させ、両眼立体視を行う。この方法により、たとえば、脳の画像診断においてより、疾病箇所近傍の磁場情報を立体的に捉えることが可能となる。
【0139】
測定対象(対象物)を本発明に係る磁場分布取得装置で撮像する前に、測定対象に強制的に磁場を加え、磁化した状態にて、測定対象近傍の3次元磁場分布を取得してもよい。これにより、たとえば、建築構造物におけるコンクリート内部の鉄筋の状態を高解像度に撮像することができる。また、鉄筋部分の錆など構造劣化を非破壊で把握することが可能となり、道路やトンネル検査において有効である。
【0140】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0141】
1 磁場分布取得装置
2,2a〜2e センサ部
3 移動機構
4 コンピュータ
5 演算部
9 対象物
21,21b〜21e 第1センサ群
22,22b〜22e 第2センサ群
51 補間演算部
52 微分測定値群生成部
81 第1平面
82 第2平面
211,211b〜211e 第1センサ
221,221b〜221e 第2センサ
【技術分野】
【0001】
本発明は、3次元磁場分布を取得する磁場分布取得装置に関する。
【背景技術】
【0002】
従来より、超伝導量子干渉計(Superconducting Quantum Interference Device:SQUID)センサを用いて磁場分布を取得することが行われており、例えば、特許文献1では、ヘルメット状をなすセンサホルダにおいて、多数のSQUIDセンサを被験者の頭の表面に沿うように配置して固定し、被験者の脳の様々な位置から発生する磁場を検出する脳磁計が開示されている。
【0003】
また、特許文献2の3次元磁場分布の取得手法では、磁区を有する試料の上方において、磁気力顕微鏡を用いて特定の測定面での磁気力勾配の分布が2次元の磁気力勾配画像として取得される。また、上記測定面から微小距離dだけ離れた他の測定面にて測定を行って補助磁気力勾配画像が取得され、これらの差分を微小距離dで除算して磁気力勾配の勾配画像が取得される。磁気力勾配画像および磁気力勾配の勾配画像はフーリエ変換されてラプラス方程式の一般解から導かれる3次元場取得式に代入され、3次元磁気力勾配分布画像が高精度に取得される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−46350号公報
【特許文献2】国際公開第2008/123432号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の脳磁計では、ヘルメット状のセンサホルダにSQUIDセンサが固定されるため、特許文献2で示される3次元磁場分布の再構成を行うことができず、厳密な脳の深部の磁場の情報を正確に得ることができない。特許文献2の手法は、ラプラス方程式の厳密解を用いるため、磁場発生源までの磁場分布は厳密に再構成することができる。また、ヘルメット状のセンサ配置方法では、ウエハ上に集積するLSIプロセスが適用できず、高密度集積化に適さない。その結果、脳の深部の磁場を高精度に再構成することができず、脳の疾病に対する画像診断の精度向上に限界がある。
【0006】
一方、特許文献2のように、対象物との間において異なる2つの距離にて磁気力勾配分布(または、磁場ベクトルにおける特定方向への射影成分の特定方向のn回微分の2次元分布)を取得する場合に、センサ(例えば、特許文献2では、磁気力顕微鏡のカンチレバーの探針)を対象物に対して2次元に相対移動して磁気力勾配分布を取得するときには、一の測定面にてセンサを2次元に相対移動して磁気力勾配分布を取得した後に、当該測定面から微小距離だけ離れた他の測定面にて同様の測定がさらに行われる。したがって、測定に長時間を要し、周囲の温度変化による対象物の熱膨張や、対象物が生物である場合における当該対象物の動き等により、2つの測定面にて取得される2つの磁気力勾配分布において、測定面に垂直な方向に重なる2つの位置に対応する対象物上の部位が相違してしまう。この場合、磁気力勾配の勾配画像を精度よく取得することができず、3次元磁気力勾配分布を容易かつ高精度に取得することが困難となる。また、センサを、測定対象に接近と退避を繰り返した後、測定対象に対して1画素分のみ相対移動して、さらに測定対象に接近と退避を繰り返す、この一連の動作によって上記の、2つ測定画像を得る方法も想定されるが、この場合は、2枚の画像の面方向の位置ずれは軽減されるが、上記の方法と同様に測定時間を要するため、測定対象に対する距離の位置ずれの影響が発生する。
【0007】
本発明は上記課題に鑑みなされたものであり、対象物との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行い、3次元磁場分布を高精度に取得することを目的としている。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、3次元磁場分布を取得する磁場分布取得装置であって、磁場分布を測定する第1センサ群が対象物に対向する第1平面上に離散的に配列されるとともに、前記第1平面から前記対象物側に微小距離だけ離れ、かつ、前記第1平面に対して平行に固定された第2平面上に、前記第1センサ群と同様の構成の第2センサ群が、前記第1平面の法線方向において前記第1センサ群と重なることなく離散的に配列されたセンサ部と、前記第1センサ群の第1測定値群、および、前記第2センサ群の第2測定値群に基づいて、前記対象物に起因する3次元磁場分布を求める演算部とを備える。
【0009】
請求項2に記載の発明は、請求項1に記載の磁場分布取得装置であって、前記演算部が、前記第1センサ群および前記第2センサ群のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、前記一方のセンサ群が配列される一方の平面上において、前記法線方向において他方のセンサ群と重なる位置における磁場を、新たな測定値群として求める補間演算部と、前記新たな測定値群と前記他方のセンサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部とを備える。
【0010】
請求項3に記載の発明は、請求項1に記載の磁場分布取得装置であって、前記センサ部において、前記第1センサ群の配列と前記第2センサ群の配列とが同様であり、前記磁場分布取得装置が、前記センサ部を前記第1平面に沿う方向に前記対象物に対して相対的に移動する移動機構と、前記センサ部にて一の測定を行った後、前記移動機構により前記センサ部を前記対象物に対して相対的に移動して、前記一の測定時における前記第2センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第1平面上の相対位置に前記第1センサ群を配置するとともに、前記一の測定時における前記第1センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第2平面上の相対位置に前記第2センサ群を配置し、他の測定を行う制御部とをさらに備え、前記演算部が、前記一の測定および前記他の測定における前記第1センサ群の測定値群と、前記一の測定および前記他の測定における前記第2センサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部を備える。
【0011】
請求項4に記載の発明は、請求項2または3に記載の磁場分布取得装置であって、前記演算部にて求められる3次元磁場分布が、ラプラス方程式を満たすとともにφ(x,y,z)(ただし、前記第1平面および前記第2平面に平行かつ互いに垂直な2方向をX,Y方向とし、前記法線方向をZ方向として、x,y,zはX,Y,Z方向にて規定される直交座標系の座標パラメータを示す。)にて表され、前記第1平面または前記第2平面がz=0を満たす測定面であり、前記演算部が、前記測定面における測定値群であるφ(x,y,0)および前記微分測定値群であるφz(x,y,0)をそれぞれx,yに関して2次元フーリエ変換してψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。)を求め、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をx,yに関してフーリエ変換したものを導くことにより、φ(x,y,z)を求める。
【0012】
請求項5に記載の発明は、請求項4に記載の磁場分布取得装置であって、前記演算部が、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値を求め、前記相違を示す値が所定値以下となるzの値を、磁場の発生源のZ方向の位置として特定する。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の磁場分布取得装置であって、前記第1センサ群および前記第2センサ群に含まれる各センサが、薄膜素子である。
【発明の効果】
【0014】
本発明によれば、対象物との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行うことができ、3次元磁場分布を高精度に取得することができる。
【0015】
また、請求項2および3の発明では、微分測定値群を精度よく求めることができ、請求項4の発明では、3次元磁場分布をより精度よく求めることができ、請求項5の発明では、磁場の発生源の位置を精度よく特定することができる。
【図面の簡単な説明】
【0016】
【図1.A】特定平面上に設置された電流経路が遠方に形成する2次元磁場分布(特定平面の法線方向成分)を示す図である。
【図1.B】特定平面上に設置された電流経路が遠方に形成する2次元磁場分布(特定平面の法線方向成分)を示す図である。
【図1.C】図1.Aおよび図1.Bの2次元磁場分布を基に再構成した2次元磁場分布を示す図である。
【図2】磁場分布取得装置の構成を示す図である。
【図3】センサ部を示す図である。
【図4】センサ部を示す断面図である。
【図5.A】製造途上のセンサ部を示す図である。
【図5.B】製造途上のセンサ部を示す図である。
【図5.C】製造途上のセンサ部を示す図である。
【図5.D】製造途上のセンサ部を示す図である。
【図5.E】製造途上のセンサ部を示す図である。
【図6】コンピュータの構成を示すブロック図である。
【図7】コンピュータが実現する機能構成を示すブロック図である。
【図8】磁場分布取得装置が3次元磁場分布を取得する処理の流れを示す図である。
【図9】センサ部を示す図である。
【図10】比較例のセンサ部を示す図である。
【図11】比較例のセンサ部を示す断面図である。
【図12】段差の最小限界値と、電流経路とセンサとの間のY方向の距離およびセンサの抵抗変化率の最大値との関係を示す図である。
【図13】段差の最小限界値と、電流経路とセンサとの間のY方向の距離との関係を示す図である。
【図14】段差の最小限界値とセンサの抵抗変化率の最大値との関係を示す図である。
【図15】段差の最小限界値と、電流経路とセンサとの間のY方向の距離および素子抵抗との関係を示す図である。
【図16】段差の最小限界値と素子抵抗との関係を示す図である。
【図17】センサ部の他の例を示す図である。
【図18】関連技術に係る2次元場分布取得方法の原理を説明するための図である。
【図19】センサ部の他の例を示す図である。
【図20】センサ部の他の例を示す断面図である。
【図21】他の比較例のセンサ部を示す図である。
【図22】他の比較例のセンサ部を示す断面図である。
【図23】センサ部の他の例を示す図である。
【図24】センサ部の他の例を示す断面図である。
【図25】センサ部の他の例を示す図である。
【図26】センサ部の他の例を示す断面図である。
【図27】他の比較例のセンサ部を示す図である。
【図28】他の比較例のセンサ部を示す断面図である。
【図29】他の比較例のセンサ部を示す図である。
【図30】他の比較例のセンサ部を示す断面図である。
【図31】センサ部の他の例を示す図である。
【図32】磁場分布取得装置の他の例を示す図である。
【図33】両眼立体視を行う様子を示す図である。
【発明を実施するための形態】
【0017】
まず、本発明に係る磁場分布取得方法の原理について説明する。Eを電場の強度、Bを磁束密度、Hを磁場の強度、Dを電束密度、iを電流密度、ρを電荷密度、tを時間として、マクスウェルの基礎方程式は数1にて表される。
【0018】
【数1】
【0019】
σを導電率として、iはσEと表すことができ、さらに、E=E’ejωt、B=B’ejωt、H=H’ejωt、D=D’ejωt(ただし、E’、B’、H’、D’は振幅を表し、jは虚数であり、ωは角振動数である。)とおくと、数1は数2にて表される。
【0020】
【数2】
【0021】
誘電率をεとして、D’はεE’と表すことができるため、数2の上から2番目の式は数3にて表され、さらに、数4に変形可能である。
【0022】
【数3】
【0023】
【数4】
【0024】
透磁率をμとして、B’はμH’と表すことができ、B’=μH’および数2の最も上の式より、数4は数5にて表される。
【0025】
【数5】
【0026】
ここで、ナブラ∇およびラプラシアンΔを用いて数6が成り立つ。
【0027】
【数6】
【0028】
また、数2の最下段の式からdivH’は0となり、数6中の∇・H’は0となるため、数5は数7にて表される。
【0029】
【数7】
【0030】
数7においてωが十分に小さいときには、ΔH’は0となり、H’にて表される磁場はラプラス方程式を満たす。
【0031】
本磁場分布取得方法では、測定の対象物は互いに垂直なX,Y,Z方向にて規定される直交座標系に配置されており、H’はX方向、Y方向およびZ方向のそれぞれの成分を有している。後述のセンサ部では、予め定められた方向(当該方向におよそ沿う方向であってもよく、以下、「検出方向」という。)の磁場(ベクトル)の成分が検出されるため、磁場H’の検出方向成分(以下、単に「磁場」ともいう。)の3次元分布(以下、「3次元磁場分布」ともいう。)が測定対象の場の分布についての関数とされ、以下、φ(x,y,z)(ただし、x,y,zはX,Y,Z方向の座標パラメータを示す。)と表す。
【0032】
既述のように、φ(x,y,z)はラプラシアンΔを用いて数8にて表される。
【0033】
【数8】
【0034】
よって、国際公開第2008/123432号パンフレット(特許文献2)と同様の手法により3次元磁場分布の取得に係る式が導かれる。具体的には、数8の方程式の一般解は、X、Y、Z直交座標系においてZ方向に指数関数的に減衰する項と指数関数的に増大する項との和として数9にて表すことができる。
【0035】
【数9】
【0036】
ただし、数9において、kx,kyはX方向およびY方向の波数であり、A(k),B(k)はkx,kyで表される関数である。さらに、数9の両辺をzで1回微分したものは数10にて表される。数10では、φ(x,y,z)をzで1回微分したものをφz(x,y,z)と表している。
【0037】
【数10】
【0038】
ここで、z=0を満たすXY平面に平行な面におけるφ(x,y,z)、すなわち、φ(x,y,0)は数11にて表される。
【0039】
【数11】
【0040】
同様に、数10にz=0を代入することによりφz(x,y,0)は数12にて表される。
【0041】
【数12】
【0042】
φ(x,y,0)とφz(x,y,0)とをそれぞれフーリエ変換したψ(kx,ky)およびψz(kx,ky)(以下、ψ(k)およびψz(k)と表す。)は、それぞれA(k)+B(k)および|k|(A(k)−B(k))にて表される。したがって、A(k)およびB(k)のそれぞれをψ(k)およびψz(k)を用いて表すことができ、これらを数9に代入することにより数13が導かれる。
【0043】
【数13】
【0044】
以上のことから、対象物の外部に設定されたz=0を満たす測定面における測定によりディリクレ型境界条件であるφ(x,y,0)、および、ノイマン型境界条件であるφz(x,y,0)が得られる場合、これらをフーリエ変換することによって数13に示すようにφ(x,y,z)をxおよびyに関してフーリエ変換したものを導くとともに逆フーリエ変換を行うことにより、φ(x,y,z)を取得することができ、3次元磁場分布が厳密に導かれることとなる。
【0045】
図1.Aおよび図1.Bはラプラス方程式を満たす磁場の一例を示す図であり、「神」の字状の経路に電流を流した場合に周囲に形成される磁場を、コンピュータにより求めた結果を示している。上記電流経路はXY平面に平行な所定の面上に存在し、図1.Aおよび図1.Bは、この面からZ方向に4.25μm(マイクロメートル)、4.75μm離れた面における磁場をそれぞれ示している。図1.Cは、図1.Aおよび図1.Bの2つの2次元磁場分布画像を用いて、数13により3次元磁場分布を再構成して、上記電流経路からZ方向に0.25μm離れた座標の2次元磁場分布を表示したものである。なお、図1.Cでは、参考のため、白い線にて「神」の字を記している。
【0046】
数13により再構成された図1.Cに示すように、電流経路に近接する面における磁場では、電流経路の形状を判別することができるが、図1.Aおよび図1.Bに示すように、電流経路から離れた面では、電流経路の形状は明瞭ではなくなる。ところが、例えば、図1.Bに示す磁場の面がz=0を満たす測定面であると想定し、上述のφ(x,y,0)およびφz(x,y,0)が測定により取得される場合、本発明に係る磁場分布取得方法を用いることにより、任意のzの値におけるφ(x,y,z)を求めることが可能となり、電流経路が対象物内に形成されている場合等により直接測定が不可能な面(図1.Cに示す磁場の面)における磁場分布を再現することが実現される。なお、上記原理はφ(x,y,z)がラプラス方程式を満たす範囲内で成立し、この範囲で磁場分布を求めることができる。
【0047】
次に、上記磁場分布取得方法を用いる磁場分布取得装置について説明する。図2は、磁場分布取得装置1の構成を示す図である。磁場分布取得装置1は、対象物9(例えば、人体)に由来する磁場分布を測定する複数のセンサを有する平面状のセンサ部2、センサ部2をその主面に沿って移動する移動機構3、および、磁場分布取得装置1の各構成要素の制御を担う制御部であるコンピュータ4を備える。なお、図2において破線の矩形にて示す回動機構3bは、後述の処理例にて用いられるものであり、本処理例では用いられない。
【0048】
図3は、対象物9側から見たセンサ部2を示す図であり、図4は、図3中の矢印A−Aの位置におけるセンサ部2の断面図である。図4に示すように、センサ部2は板状の基材20を有し、トンネル磁気抵抗(TMR (Tunneling Magneto Resistance))効果を利用した薄膜素子である複数の第1センサ211が基材20の主面上に形成される。複数の第1センサ211は絶縁材料231にて覆われており、表面が平坦化された絶縁材料231上に、第1センサ211と同様のTMR素子である複数の第2センサ221が形成される。複数の第2センサ221も、第1センサ211と同様に、絶縁材料232にて覆われる。
【0049】
図3では、絶縁材料231,232内の第1センサ211および第2センサ221を実線にて図示するとともに、第1センサ211に平行斜線を付しており(後述の図9、図17、図19、図23および図25において同様)、第1センサ211、および、第2センサ221は図3中のX方向およびY方向に交互に(すなわち、市松模様状に)配置される。また、互いに隣接する第1センサ211と第2センサ221との間のX方向およびY方向の中心間距離(以下、「配列ピッチ」という。)は、それぞれP1およびP2にて一定である。以下の説明では、複数の第1センサ211の集合を第1センサ群21と呼び、複数の第2センサ221の集合を第2センサ群22と呼ぶ。図3では、144個のセンサ211,221が配列されるが、実際のセンサ部2では、多数のセンサ211,221が配列される。
【0050】
ここで、基材20の主面(図4中の(+Z)側の主面)を含む平面を第1平面81、平坦化された絶縁材料231の主面(図4中の(+Z)側の主面)を含む平面を第2平面82と呼ぶと、センサ部2では、図3および図4に示すように、第1センサ群21が対象物9に対向する第1平面81上に離散的に配列される。また、第1平面81から対象物9側((+Z)側)に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向(すなわち、Z方向)において第1センサ群21と重なることなく離散的に配列される。なお、第1平面81および第2平面82はX方向およびY方向に平行である。
【0051】
センサ部2を製造する際には、図5.Aに示すように、基材20上に強磁性金属層291、絶縁体層292、強磁性金属層293が順に形成され、図5.Bに示すように、これらの層291〜293上にネガ型の感光材料(フォトレジスト)の膜299が形成される。続いて、第1センサ群21の複数の第1センサ211に対応する膜299上の領域に(感光材料がポジ型である場合には、当該領域以外に)光が照射され、現像処理を行うことにより、図5.Cに示すように、複数の第1センサ211に対応する感光材料のパターンが形成される。そして、プラズマエッチング処理が行われた後、感光材料が除去されることにより、図5.Dに示すように、基材20上に複数の第1センサ211が形成される。
【0052】
基材20上には、絶縁材料が付与され、その表面が研磨されて平坦化されることにより、図5.Eに示すように、絶縁材料(の層)231が形成される。絶縁材料231上において上記処理が繰り返されることにより、第1センサ群21、絶縁材料231、第2センサ群22および絶縁材料232が形成された図4のセンサ部2が完成する。実際には、各センサ211,221には、導電性の引出線が形成される。なお、強磁性金属層291,293の一方がピン層であり、他方がソフト層である。
【0053】
コンピュータ4は、図6に示すように、各種演算を行うCPU41、基本プログラムを記憶するROM42および各種情報を記憶するRAM43をバスラインに接続した一般的なコンピュータシステムとなっている。バスラインにはさらに、情報記憶を行う固定ディスク44、各種情報の表示を行うディスプレイ45、操作者からの入力を受け付けるキーボード46aおよびマウス46b、光ディスク、磁気ディスク、光磁気ディスク等のコンピュータ読み取り可能な記録媒体8から情報の読み取りを行う読取装置47、並びに、移動機構3に制御信号を送り出したり、センサ部2からの信号が入力される通信部48が、適宜、インターフェイス(I/F)を介する等して接続される。
【0054】
コンピュータ4には、事前に読取装置47を介して記録媒体8からプログラム441が読み出され、固定ディスク44に記憶される。そして、プログラム441がRAM43にコピーされるとともにCPU41がRAM43内のプログラムに従って演算処理を実行することにより(すなわち、コンピュータ4がプログラムを実行することにより)、後述する演算部としての機能が実現される。
【0055】
図7は、CPU41がプログラム441に従って動作することにより、CPU41、ROM42、RAM43、固定ディスク44等が実現する機能構成を示すブロック図である。図7において補間演算部51、微分測定値群生成部52および磁場取得部53を含む演算部5がCPU41等により実現される機能を示す。なお、補間演算部51は後述の処理にて用いられる機能である。これらの機能は専用の電気的回路により実現されてもよく、部分的に専用の電気的回路が用いられてもよい。また、複数のコンピュータにより実現されてもよい。
【0056】
図8は磁場分布取得装置1が3次元磁場分布を取得する処理の流れを示す図である。図2の磁場分布取得装置1では、まず、センサ部2に対向する位置に対象物9が配置され、図3のセンサ部2の第1センサ群21および第2センサ群22にて同時に磁場分布が測定される(ステップS11)。既述のように、各センサ211,221は、基材20の主面に沿って広がる2つの強磁性金属層の間に絶縁体層を挟んだ構造であり、センサ211,221では、XY平面に沿う方向、例えばX方向の磁場が検出される(すなわち、検出方向はX方向である。)。第1センサ群21および第2センサ群22にて取得された検出方向の磁場(以下、単に「磁場」ともいう。)は、演算部5に出力される。
【0057】
続いて、センサ部2を移動することが確認された後(ステップS12)、移動機構3によりセンサ部2がX方向に配列ピッチP1に等しい距離だけ移動される(ステップS13)。図9では、移動前のセンサ部2を二点鎖線にて示し、移動後のセンサ部2を実線にて示している。第1平面81上における第1センサ群21の配列と、第2平面82上における第2センサ群22の配列とが同様であるため、移動後のセンサ部2では、直前の測定時における第2センサ群22の位置とZ方向に重なる第1平面81上の位置に第1センサ群21が配置されるとともに、直前の測定時における第1センサ群21の位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される(ただし、図9中の最も左側((−X)側)にてY方向に並ぶ複数のセンサ211,221を除く。)。
【0058】
そして、第1センサ群21および第2センサ群22にて検出方向の磁場が一斉に測定され、演算部5に出力される(ステップS11)。2度繰り返されたステップS11における2回の測定により、図9の移動後のセンサ部2において、最も左側にてY方向に並ぶ複数のセンサ211,221を除く全てのセンサ211,221のXおよびY方向の位置にて、第1平面81上の磁場および第2平面82上の磁場が取得される。
【0059】
微分測定値群生成部52では、第1平面81をz=0を満たす測定面として、2回のステップS11における第1センサ群21の測定値群から、φ(x,y,0)が取得される。本実施の形態では、測定面81上の各位置におけるφ(x,y,0)の値(磁場)が画素値に変換され、測定面81における磁場の2次元分布が第1画像(正確には画像のデータ)として取得される。同様に、2回のステップS11における第2センサ群22の測定値群から、第2平面82における磁場の分布(すなわち、φ(x,y,d))が第2画像として取得される。
【0060】
第1および第2画像が準備されると、これらの画像の差分画像が求められ、当該差分画像を微小距離d(第1平面81と第2平面82との間の距離)で除算した微分画像が生成される。微分画像は測定面81における磁場のZ方向の微分、すなわち、磁場の勾配を実質的に示す画像となる(ステップS14)。既述のように、第1画像はφ(x,y,0)にて表される。また、磁場の勾配は磁場をzにて微分したものであることから、磁場の勾配を示す微分画像はφz(x,y,0)を示す画像となる。
【0061】
2回のステップS11における測定にて第1センサ群21により取得される測定値群を第1測定値群とし、第2センサ群22により取得される測定値群を第2測定値群とした場合、上記ステップS11〜S14の処理は、磁場の2次元分布(以下、「磁場分布」ともいう。)を示す第1測定値群および第2測定値群を取得し、第1測定値群と第2測定値群との差分測定値群を求め、さらに、差分測定値群を微小距離dで除算して微分測定値群を取得する工程となっている。
【0062】
続いて、磁場取得部53では、φ(x,y,0)である第1画像およびφz(x,y,0)である微分画像が、xおよびyに関して2次元フーリエ変換されてψ(k)およびψz(k)(すなわち、ψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。))が求められる(ステップS15)。フーリエ変換として具体的には2次元の離散フーリエ変換が行われ、フーリエ変換に際して、例えば、0〜πの範囲の正弦関数のM乗(Mは0以上)を窓関数として両画像に掛ける手法が採用される。
【0063】
ψ(k)およびψz(k)が求められると、ψ(k)およびψz(k)を用いて、数13で示される式(以下、「3次元磁場分布取得式」と呼ぶ。)によりφ(x,y,z)が求められる(ステップS16)。なお、ψ(k)およびψz(k)を3次元磁場分布取得式に代入してkに関して逆フーリエ変換する際には、フーリエ変換時と同様の窓関数が利用される。φ(x,y,z)が求められることにより、磁場の3次元分布(3次元磁場分布)が厳密に求められることとなる。
【0064】
続いて、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値(以下、「評価値」という。)が求められる。本実施の形態では、iは1であり、φ(x,y,zn)とφ(x,y,zn−1)との差の総和や、相互相関(類似性を示す他の値であってもよい。)等が、両者の相違が大きいほど値が高くなる評価値として用いられる。そして、評価値が所定値以下となるzの値hが求められ、磁場の発生源のZ方向の位置(およその位置)として特定される。磁場の発生源は、対象物9の表面または内部となる。磁場分布取得装置1ではφ(x,y,h)を示す画像が磁場の発生源(近傍)における磁場分布を示す画像として固定ディスク44に保存される(ステップS17)。磁場の発生源における磁場分布は、磁場の発生源の状態と対応しているため、以上の動作により、磁場の発生源が対象物内である場合等であっても、磁場の発生源の状態を得ることができる。
【0065】
ここで、1つのセンサを対象物に対してX方向およびY方向に移動して磁場分布を取得する比較例の測定について述べる。比較例の測定手法を用いて磁場を取得する場合には、一の測定面上にてセンサをX方向およびY方向に移動して磁場分布を取得した後に、当該測定面からZ方向に微小距離だけ離れた他の測定面にて同様の測定が行われるため、測定に長時間を要してしまう。したがって、周囲温度の変化による対象物の熱膨張や、対象物が生物である場合における当該対象物の動き等により、2つの測定面にて取得される2つの磁場分布において、Z方向に重なる2つの位置が対応する対象物上の部位が相違してしまう。この場合、微分画像を精度よく取得することができず、3次元磁場を高精度に取得することが困難となる。また、1つのセンサを対象物に対してX方向およびZ方向に移動して、異なる高さで2点または2点以上の座標で磁場データを取得後、Y方向に1画素分位置を変える動作を繰り返す方法においても、上記の同様またはそれ以上のデータ量を取得することが可能となるが、この場合は、2枚の画像データのXY座標の位置はセンサと試料の相対位置の経時変化があったとしても保障されるが、Z座標の信頼性は低い。
【0066】
これに対し、磁場分布取得装置1のセンサ部2では、第1センサ群21が対象物9に対向する第1平面81上に離散的に配列されるとともに、第1平面81から対象物9側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向において第1センサ群21と重なることなく離散的に配列される。これにより、磁場分布取得装置1では、対象物9との間において、異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、精度よく行うことができる。その結果、第1センサ群21の第1測定値群、および、第2センサ群22の第2測定値群に基づいて、対象物9に起因する3次元磁場分布を高精度に取得することが実現される。
【0067】
ところで、図10および図11に示すように、複数のセンサ911が同一平面上においてX方向およびY方向に配列ピッチP1,P2にて配列される他の比較例のセンサ部91を想定した場合、このようなセンサ部91では、X方向およびY方向におけるセンサ911間の距離が狭くなり、センサ部91の製造が容易ではない。これに対し、図4のセンサ部2では、第1センサ群21が第1平面81上に形成され、第2センサ群22が第2平面82上に形成されることにより、第1平面81および第2平面82のそれぞれにおいて、X方向およびY方向におけるセンサ間の距離を、比較例のセンサ部91に比べて広くすることができ、センサ部2を容易に製造することができる。なお、半導体製造プロセスと同様の手法にて作製される図4のセンサ部2の場合、第1平面81および第2平面82のセンサの位置を高精度に位置合わせすることが容易に可能である。
【0068】
演算部5では、測定面81における測定値群であるφ(x,y,0)および微分測定値群であるφz(x,y,0)をそれぞれフーリエ変換してψ(kx,ky)およびψz(kx,ky)が求められ、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をフーリエ変換したものを導くことにより、φ(x,y,z)が求められる。これにより、3次元磁場分布をより精度よく求めることができる。
【0069】
また、磁場分布取得装置1では、センサ部2にて一の測定を行った後、移動機構3がセンサ部2を第1平面81に沿う方向に移動することにより、Z方向に関して当該一の測定時における第2センサ群22の位置と重なる第1平面81上の位置に第1センサ群21が配置されるとともに、当該一の測定時における第1センサ群21の位置と重なる第2平面82上の位置に第2センサ群22が配置され、他の測定が行われる。そして、当該一の測定および当該他の測定における第1センサ群21の測定値群と、当該一の測定および当該他の測定における第2センサ群22の測定値群との差分測定値群が求められ、差分測定値群を微小距離dで除算して微分測定値群が取得される。これにより、微分測定値群を精度よく求めることができ、3次元磁場分布をさらに精度よく求めることができる。
【0070】
さらに、演算部5では、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−1)(ただし、nは2以上の整数)との間の相違を示す評価値が求められ、評価値が所定値以下となるzの値が磁場の発生源のZ方向の位置として特定される。これにより、磁場の発生源の位置を精度よく特定することができる。
【0071】
ここで、センサ部2における第1平面81と第2平面82との間の微小距離d(すなわち、第1センサ211と第2センサ221との段差)の最小限界値について述べる。TMR素子である各センサ211,221では、その素子抵抗に由来するジョンソンノイズに基づいて、第1センサ211と第2センサ221との段差の最小限界値Dlim[m]が数14のように表される。数14では、対象物9における長さlx[m]の電流経路(X方向にのみ伸びる電流経路)の存在を仮定しており、当該電流経路に流れる電流値をI[A]としている。また、X方向に関して当該電流経路の一端と同位置となるセンサと、当該電流経路の一端との間のY方向の距離をra[m]、Z方向の距離をrb[m]としている。なお、μは透磁率であり、Aaはセンサの抵抗変化率の最大値[%]であり、v0はセンサに対する印加電圧値[V]であり、R0は磁場が作用していない状態における素子抵抗[Ω]であり、kはボルツマン定数であり、Bはノイズの帯域幅[Hz]であり、Tはセンサの温度[K]である。また、センサの抵抗変化率[%]が(Aa/2)となる際の抵抗変化率の磁場Hに対する傾きが(Aa/Hw)である場合に、BwはμHwとして求められる。
【0072】
【数14】
【0073】
図12は、段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raおよびセンサの抵抗変化率の最大値Aaとの関係を示す図である。ここでは、電流値Iは1.0[μA]であり、電流経路長lxは10[nm]であり、電流経路とセンサとの間のZ方向の距離rb(すなわち、電流経路が形成される面と測定面との間の距離)は1.0[μm]であり、素子抵抗R0は0.40[Ω](ここでは、単位面積あたりの抵抗を0.40[Ω/μm2]、素子の面積を1[μm2]とする。)であり、Hwは5.0×10−2[T]であり、ノイズの帯域幅Bは1.0[Hz]であり、センサの温度Tは300[K]である。また、図13はセンサの抵抗変化率の最大値Aaが50[%]である場合における段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raとの関係を示す図であり、図14は電流経路とセンサとの間のY方向の距離raが0.32[μm]である場合における段差の最小限界値Dlimとセンサの抵抗変化率の最大値Aaとの関係を示す図である。
【0074】
図15は、段差の最小限界値Dlimと、電流経路とセンサとの間のY方向の距離raおよび素子抵抗R0との関係を示す図である。図15では、センサの抵抗変化率の最大値Aaが50[%]である点を除き、各条件は図12と同じである。図16は、電流経路とセンサとの間のY方向の距離raが0.32[μm]である場合における段差の最小限界値Dlimと素子抵抗R0との関係を示す図である。
【0075】
例えば、電流値Iが1.0[μA]であり、電流経路長lxが10[nm]であり、電流経路とセンサとの間のZ方向の距離rbが1.0[μm]であり、電流経路とセンサとの間のY方向の距離raが3.2[μm]であり、センサの素子抵抗R0が0.40[Ω]であり、抵抗変化率の最大値Aaが50[%]であり、Hwが5.0×10−2[T]であり、ノイズの帯域幅Bが1.0[Hz]であり、センサの温度Tが300[K]である場合には、段差の最小限界値Dlimは260[nm]となる。なお、段差の最大限界値については、センサ部2と対象物9との間の距離、電流値に応じて適宜決定される。
【0076】
次に、磁場分布取得装置1における他の処理例について述べる。ここでは、第1平面81における第1センサ211のX方向およびY方向のピッチをPX,PYとし、第2平面82における第2センサ221のX方向およびY方向のピッチもPX,PYとして、第1平面81上に配置される第1センサ211のX方向およびY方向の座標が(nPX,mPY)として表され(ただし、nおよびmは0以上の整数)、第2平面82上に配置される第2センサ221のX方向およびY方向の座標が((n+1/2)PX,(m+1/2)PY)として表されるものとする。また、本処理例では、図7の補間演算部51が用いられる。
【0077】
磁場分布取得装置1では、センサ部2の第1センサ群21および第2センサ群22にて磁場が測定されると(ステップS11)、センサ部2の移動を行うことなく、磁場の勾配を示す微分画像φz(x,y,0)が取得される(ステップS12,S14)。
【0078】
具体的には、既述のように第1平面81(測定面)上に配置される第1センサ211のX方向およびY方向の座標が(nPX,mPY)として表されるため、補間演算部51では、第1センサ211により取得される測定値群φ(x,y,0)が、数15にて表される。
【0079】
【数15】
【0080】
同様に、第2センサ221により取得される測定値群φ(x,y,d)は、数16にて表される。
【0081】
【数16】
【0082】
このとき、第2平面82上において第1センサ211とZ方向に重なる位置、すなわち、X方向およびY方向の座標が(nPX,mPY)として表される位置における磁場の値φ(nPX,mPY,d)は数17のように近似することができる。
【0083】
【数17】
【0084】
すなわち、数17では、第2センサ群22の測定値群に対して補間演算を行って、第2平面82上において、複数の第1センサ211に対向する位置(第2センサ221が配置されていない位置であり、座標(nPX,mPY)にて表される位置)における新たな測定値群が求められる。なお、数17では、隣接する2つの第2センサ221における測定値の平均値の算出(線形補間)が行われるが、他の種類の補間演算が行われてもよい。
【0085】
このようにして、第1平面81および第2平面82の双方において座標(nPX,mPY)にて表される位置の測定値が取得されると、微分測定値群生成部52では、数18に示すように、当該新たな測定値群と第1センサ群21の測定値群との差分測定値群を、第1平面81と第2平面82との間の微小距離dにて除算することにより、微分画像である微分測定値群φz(x,y,0)が求められる。
【0086】
【数18】
【0087】
微分画像φz(x,y,0)が求められると、上記処理例と同様にしてφ(x,y,0)およびφz(x,y,0)が、xおよびyに関してフーリエ変換されてψ(kx,ky)およびψz(kx,ky)(すなわち、ψ(k)およびψz(k))が求められ(ステップS15)、ψ(kx,ky)およびψz(kx,ky)を用いて、3次元磁場分布取得式によりφ(x,y,z)が求められる(ステップS16)。そして、zの値を順次変更しつつ評価値が求められることにより、磁場の発生源のZ方向の位置が特定され、磁場の発生源における磁場分布を示す画像が取得される(ステップS17)。
【0088】
以上に説明したように、磁場分布取得装置1では、第2センサ群22の測定値群に対して補間演算を行うことにより、第2センサ群22が配列される第2平面82上において、Z方向において第1センサ群21と重なる位置における磁場が、新たな測定値群として求められる。そして、当該新たな測定値群と第1センサ群21の測定値群との差分測定値群を求め、当該差分測定値群を微小距離dで除算することにより、微分測定値群が取得される。これにより、磁場分布取得装置1では、センサ部2を移動することなく、微分測定値群を精度よく求めることができ、対象物9に起因する3次元磁場分布を高精度に求めることが可能となる。
【0089】
補間演算部51では、第1センサ群21の測定値群に対して補間演算を行うことにより、第1センサ群21が配列される第1平面81上において、センサ部2の法線方向において第2センサ群22と重なる位置における磁場が、新たな測定値群として求められてもよい。すなわち、第1センサ群21および第2センサ群22のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、当該一方のセンサ群が配列される一方の平面上において、センサ部2の法線方向において他方のセンサ群と重なる位置における磁場が、新たな測定値群として求められる。そして、当該新たな測定値群と当該他方のセンサ群の測定値群との差分測定値群を求め、差分測定値群を微小距離dで除算することにより、微分測定値群が取得される。また、第1センサ群21および第2センサ群22の双方の測定値群に対して補間演算を行うことにより、微分測定値群が高分解能にて求められてよい。
【0090】
磁場分布取得装置1における第1センサ211および第2センサ221の配列は様々に変更されてよく、例えば、図17に示すように、複数の第1センサ211がY方向に連続して並ぶ第1センサの列と、複数の第2センサ221がY方向に連続して並ぶ第2センサの列とがX方向に交互に配列されてもよい。
【0091】
図17のセンサ部2aにおいて、φ(x,y,0)およびφz(x,y,0)を取得する際には、一の測定を行った後(図8:ステップS11)、移動機構3によりセンサ部2aが僅かに移動され、当該一の測定時における第2センサ群22の位置(図17中にて実線にて示す。)とZ方向に重なる第1平面81上の位置に第1センサ群21が配置されるとともに、当該一の測定時における第1センサ群21の位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される(図17中にて二点鎖線にて示すセンサ部2a参照)(ステップS12,S13)。センサ部2aでは、次の測定が行われることにより(ステップS11)、φ(x,y,0)およびφ(x,y,d)が取得され、微分測定値群生成部52により、φz(x,y,0)が求められる(ステップS12,S14)。これにより、対象物9に起因する3次元磁場分布を高精度に求めることが可能となる。もちろん、図17のセンサ部2aにおいて、補間演算を行うことにより、センサ部2aを移動することなく、微分測定値群が精度よく求められてよい。
【0092】
次に、本発明の関連技術に係る2次元場分布取得方法の原理について説明する。図18は、2次元場分布取得方法の原理を説明するための図である。図18では、互いに垂直なX,Y,Z方向にて規定される直交座標系を示している。図18中にて符号92を付す薄膜状のセンサは、z=α(ただし、αは任意の値)を満たす任意の測定面上において測定面に平行な方向に伸びる。
【0093】
以下の説明では、Y方向を基準方向、センサ92の長手方向をY’方向、測定面上において長手方向(Y’方向)に垂直な方向をX’方向、基準方向とY’方向とがなす角度(以下、「センサ角度」という。)をθ、X’方向およびY’方向の座標パラメータをx’およびy’(ただし、X’方向およびY’方向の原点はZ軸上であり、図18ではX,Y、Z方向にて規定される直交座標系の原点と同じである。)とする。
【0094】
関連技術に係る2次元場分布取得方法では、センサ92をX’方向に移動して測定面上の所定の領域(対象物上にて注目する領域を測定面上に投影した領域であり、以下、「測定対象領域」という。)を通過する走査が行われる。そして、走査時においてX’方向の各位置x’にてセンサ92の全体が受ける磁場(センサ92内を通過する磁力線の総和)を示す信号が生成され、測定値として取得される。実際には、センサ角度θを0°以上180°未満の範囲内にて複数通りに変更しつつ、測定面上において長手方向に垂直な方向への走査が繰り返され、3次元場に由来する測定値を示す関数f(x’,θ)(以下、単に「測定値f(x’,θ)」という。)が、x’およびθをパラメータとして取得される。なお、Z軸は、測定対象領域のおよそ中央を通過するものとする。
【0095】
ここで、Z方向に沿って見た場合に、X’Y’座標系は、XY座標系をZ軸を中心としてセンサ角度θだけ回転させたものであるため、数19が満たされる。
【0096】
【数19】
【0097】
また、既述のように、センサ92をX’方向に移動する各走査時には、センサ92の全体が受ける磁場が取得されるため、測定値f(x’,θ)は数20にて表される。なお、センサ92の長手方向(Y’方向)に関して、センサ92は測定対象領域の幅に比べて十分に長くなるように設定されている。
【0098】
【数20】
【0099】
ここで、φ(x,y,α)をX方向およびY方向にフーリエ変換したψ(kx,ky)|z=α(以下、単にψ(kx,ky)と表す。)は数21のように表される。ただし、数21において、kx,kyはX方向およびY方向の波数である。
【0100】
【数21】
【0101】
数21において、(kx=kx’cosθ)、(ky=kx’sinθ)、(x’=xcosθ+ysinθ)とおくと、数22が得られる。ただし、数22において、kx’,ky’はX’方向およびY’方向の波数である。
【0102】
【数22】
【0103】
また、数22中の(dxdy)は数23にて表される。
【0104】
【数23】
【0105】
したがって、数22は、数19、数20および数23を用いて数24のように変形することができる。数24ではψ(kx’cosθ,kx’sinθ)をg(kx’,θ)と表している。
【0106】
【数24】
【0107】
一方で、φ(x,y,α)は数25のように表すことができる。ただし、(kx=kx’cosθ)、(ky=kx’sinθ)、(x’=xcosθ+ysinθ)とおいている。
【0108】
【数25】
【0109】
数25に数24のψ(kx’cosθ,kx’sinθ)を代入することにより、φ(x,y,α)は数26にて表される。
【0110】
【数26】
【0111】
以上のことから、基準方向とセンサ92の長手方向とがなす角度(すなわち、センサ角度)θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得し、さらに、測定値f(x’,θ)をx’に関してフーリエ変換したg(kx’,θ)を求めることにより、数26(以下、「2次元場分布取得式」と呼ぶ。)を用いてφ(x,y,α)を取得することができる。
【0112】
関連技術を用いて3次元の磁場分布を取得する際には、z=0を満たす測定面にてセンサ角度θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得することにより、第1画像であるφ(x,y,0)が求められる。続いて、z=dを満たす測定面にてセンサ角度θを複数通りに変更しつつ、測定面上におけるセンサ92の走査を行って測定値f(x’,θ)を取得することにより、第2画像であるφ(x,y,d)が求められる。そして、第1画像および第2画像に基づいて、3次元の磁場が取得される。
【0113】
次に、磁場分布取得装置1において、上記関連技術を利用して3次元磁場分布を取得する手法について説明する。図19は対象物9側から見たセンサ部2bを示す図であり、図20は、図19中の矢印B−Bの位置におけるセンサ部2bの断面図である。図19および図20に示すセンサ部2bでは、TMR素子である各第1センサ211bがz=0を満たす第1平面81上において一の方向(以下、「長手方向」という。)に伸びており、複数の第1センサ211bが当該方向に垂直な配列方向に一定のピッチにて配列される。また、各第2センサ221bも同様にz=dを満たす第2平面82上において第1センサ211bに平行に伸びており、複数の第2センサ221bが配列方向に同じピッチにて配列される。センサ部2bを平面視した図19では、第1センサ211bおよび第2センサ221bが配列方向に一定の配列ピッチにて交互に配置される。本手法に係る磁場分布取得装置1では、図2中にて破線にて示す回動機構3bによりセンサ部2bがZ軸を中心として回動可能であり、上記関連技術と同様に、各センサ211b,221bの長手方向をY’方向、長手方向(Y’方向)に垂直な方向をX’方向、Y方向(基準方向)とY’方向とがなすセンサ角度をθとする。
【0114】
次に、図19のセンサ部2bを有する磁場分布取得装置1が3次元磁場分布を取得する処理の流れについて図8に準じて説明する。磁場分布取得装置1では、センサ部2bによる1回目の測定が行われ、各センサ211b,221bにて測定値が取得される(図8:ステップS11)。続いて、移動機構3によりセンサ部2bがX’方向に配列ピッチだけ移動され(ステップS12,S13)、1回目の測定時における第2センサ群22b(すなわち、複数の第2センサ221bの集合)の位置とZ方向に重なる第1平面81上の位置に第1センサ群21b(すなわち、複数の第1センサ211の集合)が配置されるとともに、1回目の測定時における第1センサ群21bの位置とZ方向に重なる第2平面82上の位置に第2センサ群22が配置される。そして、2回目の測定が行われることにより、各センサ211b,221bにて測定値が取得される(ステップS11)。
【0115】
したがって、1回目および2回目の測定により、第1平面81上において長手方向に垂直なX’方向の各位置x’にて第1センサ211の全体が受ける磁場が取得され、第2平面82上において長手方向に垂直なX’方向の各位置x’にて第2センサ221の全体が受ける磁場が取得される。
【0116】
次の測定が行われることが確認されると(ステップS12)、回動機構3bがセンサ部2bを回動することにより、基準方向と各センサ211b,221bの長手方向(Y’方向)とがなすセンサ角度θが一定の微小角度(例えば、1度以上15度以下(好ましくは、10度以下であり、より好ましくは、5度以下)の角度)だけ変更される(ステップS13)。そして、上記と同様に、回動後のセンサ部2bにおける1回目の測定(ステップS11)、センサ部2bの移動(ステップS12,S13)、および、2回目の測定が行われる(ステップS11)。以下の説明では、一のセンサ角度θにおける1回目の測定、および、センサ部2bの配列ピッチ分の移動後における2回目の測定を、「センサ部2bの移動前後における測定」という。
【0117】
このように、磁場分布取得装置1では、コンピュータ4の制御により、回動機構3bがセンサ角度θを複数通りに変更しつつセンサ部2bの移動前後における測定が繰り返され、第1平面81および第2平面82のそれぞれにおいて、x’およびθをパラメータとする測定値f(x’,θ)が取得される。本実施の形態における複数のセンサ角度θは、0°以上180°未満の範囲内の一定間隔の角度である。
【0118】
各平面81,82において測定値f(x’,θ)が取得されると(ステップS12)、演算部5では、f(x’,θ)をx’に関してフーリエ変換することにより、g(kx’,θ)が取得される。そして、g(kx’,θ)を2次元場分布取得式(数26)に代入することにより、第1平面81における2次元場を示すφ(x,y,0)、および、第2平面82における2次元場を示すφ(x,y,d)(すなわち、第1画像および第2画像)が求められる。そして、これらの画像の差分画像が求められ、当該差分画像を微小距離dで除算した微分画像φz(x,y,0)が生成される(ステップS14)。
【0119】
微分画像φz(x,y,0)が求められると、上記処理例と同様にしてφ(x,y,0)およびφz(x,y,0)が、xおよびyに関してフーリエ変換されてψ(kx,ky)およびψz(kx,ky)(すなわち、ψ(k)およびψz(k))が求められ(ステップS15)、ψ(kx,ky)およびψz(kx,ky)を用いて、3次元磁場分布取得式によりφ(x,y,z)が求められる(ステップS16)。そして、zの値を順次変更しつつ評価値が求められることにより、磁場の発生源のZ方向の位置が特定され、磁場の発生源における磁場分布を示す画像が取得される(ステップS17)。
【0120】
以上に説明したように、図19のセンサ部2bを有する磁場分布取得装置1では、それぞれが長尺の第1センサ群21bが第1平面81上に間隔を空けて配列されるとともに、第1平面81から対象物9側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21bと同様の形状の第2センサ群22bが、第1平面81の法線方向において第1センサ群21bと重なることなく配列される。そして、センサ角度θを複数通りに変更しつつ、各センサ角度θにてセンサ部2bの移動前後における測定が行われることにより、第1センサ群21の第1測定値群であるφ(x,y,0)、および、第2センサ群22の第2測定値群であるφ(x,y,d)が取得される。これにより、上記関連技術のように2つの平面のそれぞれにおいて、各センサ角度θにてセンサ92を走査する場合に比べて、第1測定値群であるφ(x,y,0)、および、第2測定値群であるφ(x,y,d)を高速に、かつ、精度よく取得することができ、その結果、φ(x,y,0)およびφ(x,y,d)に基づいて、高精度な3次元磁場分布を短時間にて取得することができる。
【0121】
ここで、図21および図22に示すように、長尺の複数のセンサ911bが同一平面上において一定の配列ピッチにて配列される比較例のセンサ部91bを想定した場合、全てのセンサ911bが同一平面上に形成されるため、センサ911b間の距離が狭くなり、センサ部91bの製造が容易ではない。
【0122】
これに対し、センサ部2bでは、第1平面81および第2平面82のそれぞれにおいて、配列方向におけるセンサ間の距離が、比較例のセンサ部91bに比べて長くなるため、センサ部2bを容易に製造することができる。なお、図17のセンサ部2aにおいて、Y方向に並ぶ複数の第1センサ211を長尺の1つの第1センサとして捉え、Y方向に並ぶ複数の第2センサ221を長尺の1つの第2センサとして捉えて、上記と同様の手法により、3次元磁場が求められてもよい(後述の図23のセンサ部2cにおいて同様)。
【0123】
上記センサ部2,2a,2bでは、XY平面におよそ沿う方向の磁場が検出されるが、磁場の検出方向は他の方向であってもよい。図23および図24はセンサ部の他の例を示す図である。図23は、対象物9側から見たセンサ部2cを示す図であり、図24は、図23中の矢印C−Cの位置におけるセンサ部2cの断面図である。
【0124】
センサ部2cでは、図24に示すように、基材20上において複数の第1センサ211cおよび複数の第2センサ221cがX方向に沿って千鳥状に配列形成される。詳細には、複数の第1センサ211cの一端は、Z方向に垂直な第1平面81(図24中にて二点鎖線にて示す。第2平面82において同様。)上に配置され、複数の第2センサ221cの一端は、第1平面81から対象物9側に微小距離dだけ離れ、かつ、Z方向に垂直な第2平面82上に配置される。図23に示すように、センサ部2cでは、複数の第1センサ211cおよび複数の第2センサ221cは絶縁材料230にて覆われており、絶縁材料230の表面(基材20とは反対側の主面)は平坦化される。センサ部2cでは、複数の第1センサ211c、複数の第2センサ221cおよび絶縁材料230によりセンサ層24cが形成される。
【0125】
基材20上に形成されたセンサ層24cの絶縁材料230には、上記と同様にして、複数の第1センサ211cおよび第2センサ221cがX方向に沿って千鳥状に配列形成され、複数の第1センサ211cおよび複数の第2センサ221cが絶縁材料230にて覆われることにより、センサ層24cが形成される。センサ部2cでは、多数のセンサ層24cが積層されることにより、第1センサ群21cが第1平面81上に2次元配列されるとともに、第1センサ群21cと同様の構成の第2センサ群22cが、Z方向において第1センサ群21cと重なることなく第2平面82上に2次元配列される。また、各センサ211c,221cでは、ZX平面におよそ沿う方向の磁場が検出される。
【0126】
センサ部2cでは、X方向の分解能はセンサ211c,221cのX方向の配列ピッチにより決定され、Y方向の分解能はセンサ層24cの厚さにより決定される。実際のセンサ層24cの厚さは極めて薄いため、センサ部2cを有する磁場分布取得装置1では、対象物9との間において異なる2つの距離における磁場の2次元分布の測定を高速に、かつ、高分解能(特に、センサ層24cの積層方向に高い分解能)にて行うことができる。なお、第1センサ211cの一端と、センサ部2cの検出面との間の距離(図24中にて符号G1を付す矢印にて示す距離)は可能な範囲で小さくされることが好ましい。
【0127】
図25および図26はセンサ部のさらに他の例を示す図である。図25は、対象物9側から見たセンサ部2dを示す図であり、図26は、図25中の矢印D−Dの位置におけるセンサ部2dの断面図である。
【0128】
センサ部2dでは、図26に示すように、基材20上においてX方向に長い1つの第1センサ211dが形成される。第1センサ211dは、絶縁材料230にて覆われる。また、図25に示すように、絶縁材料230の表面(基材20とは反対側の主面)は平坦化され、第1センサ211dおよび絶縁材料230によりセンサ層24dが形成される。基材20上に形成されたセンサ層24dの絶縁材料230には、X方向に長い1つの第2センサ221dが形成され、絶縁材料230にて覆われる。これにより、第2センサ221dおよび絶縁材料230を含むセンサ層24dが形成される。実際には、第1センサ211dの側面は、Z方向に垂直な第1平面81(図26中にて二点鎖線にて示す。第2平面82において同様。)上に配置され、第2センサ221dの側面は、第1平面81から対象物9側に微小距離dだけ離れ、かつ、Z方向に垂直な第2平面82上に配置される。図25に示すように、センサ部2dでは、第1センサ211dを含むセンサ層24dと第2センサ221dを含むセンサ層24dとが交互に積層されることにより、第1平面81において第1センサ群21dが離散的に配列され、第2平面82において第2センサ群22dが離散的に配列される。
【0129】
センサ部2dを有する磁場分布取得装置では、図19のセンサ部2bを有する磁場分布取得装置と同様にして3次元磁場分布が取得される。これにより、対象物9との間において異なる2つの距離における磁場の2次元分布の測定を高速に行うことができる。また、第1平面81および第2平面82において、長手方向に垂直なX’方向の分解能がセンサ層24dの厚さにより決定されるため、磁場分布の測定を高分解能にて精度よく行うことができる。
【0130】
なお、図27および図28に示すセンサ部91cや、図29および図30に示すセンサ部91dのように、全てのセンサ911c,911dの一端(または側面)が同一平面上に配置されるセンサ部を比較例として想定した場合、比較例のセンサ部91c,91dを有する磁場分布取得装置では、センサ部91c,91dを第1平面から第2平面上に移動する機構が必要となるが、図23および図25のセンサ部2c,2dを有する磁場分布取得装置では、このような機構(すなわち、センサ部2c,2dをZ方向に移動する機構)が不要となる。
【0131】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0132】
上記実施の形態では、TMR素子がセンサとして用いられるが、磁場を測定する他の種類のセンサが用いられてもよく、例えば、図31のセンサ部2eでは、SQUID素子(例えば、30〜50μm角の大きさの素子)が第1センサ211eおよび第2センサ221eとして用いられる。センサ部2eでは、第1センサ群21eが対象物に対向する第1平面上に離散的に配列されるとともに、第1平面から対象物側に微小距離(例えば、3〜5μm)だけ離れ、かつ、第1平面に対して平行に固定された第2平面上に、第1センサ群21eと同様の構成の第2センサ群22eが、第1平面の法線方向において第1センサ群21eと重なることなく離散的に配列される。これにより、2つの平面上における磁場分布の測定を高速に行うことができる。
【0133】
磁場分布取得装置1では、第2平面がz=0を満たす測定面とされてもよく、この場合でも、第1平面における測定値群と第2平面における測定値群とに基づいて生成される微分測定値群、および、第2平面における測定値群を用いて、対象物9に起因する3次元磁場を求めることができる。
【0134】
上記実施の形態におけるセンサ部では、センサ群が離散的に配列される2つの平面(第1平面および第2平面)が設定されるが、互いに平行に設定された3以上の平面のそれぞれにてセンサ群が離散的に配列されてもよい。この場合、一の平面に配列されるセンサ群は、他の平面に配列されるセンサ群と当該平面に垂直な方向において重ならない位置に配置される。このようなセンサ部では、実際に測定に利用する2つの平面上のセンサ群が選択され、センサ部の当該平面に平行な方向への移動、および、移動後の位置における測定が繰り返されて各平面上の各位置における測定値が取得される(もちろん、上述の補間演算が行われてもよい。)。センサ部においてセンサ群が配列される平面の個数をNとすると、NC2通りの平面の組合せを決定することができる。ただし、高精度な測定を高速に行うには、2つの平面のみがセンサ部に設定され、当該2つの平面のそれぞれにセンサ群が配列されることが好ましい。
【0135】
磁場分布取得装置1では、第1センサ群の第1測定値群、および、第2センサ群の第2測定値群に基づいて、対象物9に起因する3次元磁場が求められるのであれば、上記3次元磁場分布取得式以外の演算が用いられてよい。
【0136】
移動機構3は、センサ部の第1平面に沿う方向に対象物9を移動するものであってもよい。すなわち、移動機構は、センサ部を第1平面に沿う方向に対象物に対して相対的に移動するものであればよく、これにより、センサ部にて一の測定を行った後、移動機構によりセンサ部を対象物に対して相対的に移動して、当該一の測定時における第2センサ群の対象物に対する相対位置とZ方向に重なる第1平面上の相対位置に第1センサ群を配置するとともに、当該一の測定時における第1センサ群の対象物に対する相対位置とZ方向に重なる第2平面上の相対位置に第2センサ群を配置することが可能となる。
【0137】
上記磁場分布取得装置1は、例えば、電子線出射装置から出射される電子線のプロファイリングに用いることも可能である。電子線による一括露光を行う装置では、パターン情報に応じてONまたはOFFの状態となる多数の電子線要素の束(電子線)が電子線出射装置から出射され、電子光学系を介して対象物上に照射されるが、上記磁場分布取得装置1では、電子線により生成される3次元磁場分布を取得することにより、電子線のプロファイリングが実現される。また、上記磁場分布取得装置1は、各種電子部品や半導体製品の配線検査(製造途上におけるインライン検査を含む。)、ハードディスク駆動装置の検出器、あるいは、人体の脳磁場等を取得するMRI(Magnetic Resonance Imaging)装置等、様々な用途に用いることができる。
【0138】
また、図32に示すように、本発明に基づく2つのセンサ部2を対象物9に対して、互いのセンサ部2中心が一定距離離れた異なる位置に配置して、それぞれのセンサ部2が磁場発生源近傍の異なる2次元磁場分布を数13によりそれぞれ再構成する。再構成によって得られた2枚の画像を、図33に示すようにディスプレイ45により交互に表示し、表示に同期してメガネ49の右目、左目のシャッターを交互に駆動させ、両眼立体視を行う。この方法により、たとえば、脳の画像診断においてより、疾病箇所近傍の磁場情報を立体的に捉えることが可能となる。
【0139】
測定対象(対象物)を本発明に係る磁場分布取得装置で撮像する前に、測定対象に強制的に磁場を加え、磁化した状態にて、測定対象近傍の3次元磁場分布を取得してもよい。これにより、たとえば、建築構造物におけるコンクリート内部の鉄筋の状態を高解像度に撮像することができる。また、鉄筋部分の錆など構造劣化を非破壊で把握することが可能となり、道路やトンネル検査において有効である。
【0140】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0141】
1 磁場分布取得装置
2,2a〜2e センサ部
3 移動機構
4 コンピュータ
5 演算部
9 対象物
21,21b〜21e 第1センサ群
22,22b〜22e 第2センサ群
51 補間演算部
52 微分測定値群生成部
81 第1平面
82 第2平面
211,211b〜211e 第1センサ
221,221b〜221e 第2センサ
【特許請求の範囲】
【請求項1】
3次元磁場分布を取得する磁場分布取得装置であって、
磁場分布を測定する第1センサ群が対象物に対向する第1平面上に離散的に配列されるとともに、前記第1平面から前記対象物側に微小距離だけ離れ、かつ、前記第1平面に対して平行に固定された第2平面上に、前記第1センサ群と同様の構成の第2センサ群が、前記第1平面の法線方向において前記第1センサ群と重なることなく離散的に配列されたセンサ部と、
前記第1センサ群の第1測定値群、および、前記第2センサ群の第2測定値群に基づいて、前記対象物に起因する3次元磁場分布を求める演算部と、
を備えることを特徴とする磁場分布取得装置。
【請求項2】
請求項1に記載の磁場分布取得装置であって、
前記演算部が、
前記第1センサ群および前記第2センサ群のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、前記一方のセンサ群が配列される一方の平面上において、前記法線方向において他方のセンサ群と重なる位置における磁場を、新たな測定値群として求める補間演算部と、
前記新たな測定値群と前記他方のセンサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部と、
を備えることを特徴とする磁場分布取得装置。
【請求項3】
請求項1に記載の磁場分布取得装置であって、
前記センサ部において、前記第1センサ群の配列と前記第2センサ群の配列とが同様であり、
前記磁場分布取得装置が、
前記センサ部を前記第1平面に沿う方向に前記対象物に対して相対的に移動する移動機構と、
前記センサ部にて一の測定を行った後、前記移動機構により前記センサ部を前記対象物に対して相対的に移動して、前記一の測定時における前記第2センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第1平面上の相対位置に前記第1センサ群を配置するとともに、前記一の測定時における前記第1センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第2平面上の相対位置に前記第2センサ群を配置し、他の測定を行う制御部と、
をさらに備え、
前記演算部が、
前記一の測定および前記他の測定における前記第1センサ群の測定値群と、前記一の測定および前記他の測定における前記第2センサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部を備えることを特徴とする磁場分布取得装置。
【請求項4】
請求項2または3に記載の磁場分布取得装置であって、
前記演算部にて求められる3次元磁場分布が、ラプラス方程式を満たすとともにφ(x,y,z)(ただし、前記第1平面および前記第2平面に平行かつ互いに垂直な2方向をX,Y方向とし、前記法線方向をZ方向として、x,y,zはX,Y,Z方向にて規定される直交座標系の座標パラメータを示す。)にて表され、前記第1平面または前記第2平面がz=0を満たす測定面であり、
前記演算部が、前記測定面における測定値群であるφ(x,y,0)および前記微分測定値群であるφz(x,y,0)をそれぞれx,yに関して2次元フーリエ変換してψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。)を求め、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をx,yに関してフーリエ変換したものを導くことにより、φ(x,y,z)を求めることを特徴とする磁場分布取得装置。
【請求項5】
請求項4に記載の磁場分布取得装置であって、
前記演算部が、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値を求め、前記相違を示す値が所定値以下となるzの値を、磁場の発生源のZ方向の位置として特定することを特徴とする磁場分布取得装置。
【請求項6】
請求項1ないし5のいずれかに記載の磁場分布取得装置であって、
前記第1センサ群および前記第2センサ群に含まれる各センサが、薄膜素子であることを特徴とする磁場分布取得装置。
【請求項1】
3次元磁場分布を取得する磁場分布取得装置であって、
磁場分布を測定する第1センサ群が対象物に対向する第1平面上に離散的に配列されるとともに、前記第1平面から前記対象物側に微小距離だけ離れ、かつ、前記第1平面に対して平行に固定された第2平面上に、前記第1センサ群と同様の構成の第2センサ群が、前記第1平面の法線方向において前記第1センサ群と重なることなく離散的に配列されたセンサ部と、
前記第1センサ群の第1測定値群、および、前記第2センサ群の第2測定値群に基づいて、前記対象物に起因する3次元磁場分布を求める演算部と、
を備えることを特徴とする磁場分布取得装置。
【請求項2】
請求項1に記載の磁場分布取得装置であって、
前記演算部が、
前記第1センサ群および前記第2センサ群のうち一方のセンサ群の測定値群に対して補間演算を行うことにより、前記一方のセンサ群が配列される一方の平面上において、前記法線方向において他方のセンサ群と重なる位置における磁場を、新たな測定値群として求める補間演算部と、
前記新たな測定値群と前記他方のセンサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部と、
を備えることを特徴とする磁場分布取得装置。
【請求項3】
請求項1に記載の磁場分布取得装置であって、
前記センサ部において、前記第1センサ群の配列と前記第2センサ群の配列とが同様であり、
前記磁場分布取得装置が、
前記センサ部を前記第1平面に沿う方向に前記対象物に対して相対的に移動する移動機構と、
前記センサ部にて一の測定を行った後、前記移動機構により前記センサ部を前記対象物に対して相対的に移動して、前記一の測定時における前記第2センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第1平面上の相対位置に前記第1センサ群を配置するとともに、前記一の測定時における前記第1センサ群の前記対象物に対する相対位置と前記法線方向に重なる前記第2平面上の相対位置に前記第2センサ群を配置し、他の測定を行う制御部と、
をさらに備え、
前記演算部が、
前記一の測定および前記他の測定における前記第1センサ群の測定値群と、前記一の測定および前記他の測定における前記第2センサ群の測定値群との差分測定値群を求め、前記差分測定値群を前記微小距離で除算した微分測定値群を取得する微分測定値群生成部を備えることを特徴とする磁場分布取得装置。
【請求項4】
請求項2または3に記載の磁場分布取得装置であって、
前記演算部にて求められる3次元磁場分布が、ラプラス方程式を満たすとともにφ(x,y,z)(ただし、前記第1平面および前記第2平面に平行かつ互いに垂直な2方向をX,Y方向とし、前記法線方向をZ方向として、x,y,zはX,Y,Z方向にて規定される直交座標系の座標パラメータを示す。)にて表され、前記第1平面または前記第2平面がz=0を満たす測定面であり、
前記演算部が、前記測定面における測定値群であるφ(x,y,0)および前記微分測定値群であるφz(x,y,0)をそれぞれx,yに関して2次元フーリエ変換してψ(kx,ky)およびψz(kx,ky)(ただし、kx,kyはX方向およびY方向の波数である。)を求め、さらに、ψ(kx,ky)およびψz(kx,ky)からφ(x,y,z)をx,yに関してフーリエ変換したものを導くことにより、φ(x,y,z)を求めることを特徴とする磁場分布取得装置。
【請求項5】
請求項4に記載の磁場分布取得装置であって、
前記演算部が、φ(x,y,z)におけるzの値をz1,z2,z3,・・・に順次変更しつつφ(x,y,zn)とφ(x,y,zn−i)(ただし、nは2以上の整数であり、iは1以上、かつ、n未満の整数である。)との間の相違を示す値を求め、前記相違を示す値が所定値以下となるzの値を、磁場の発生源のZ方向の位置として特定することを特徴とする磁場分布取得装置。
【請求項6】
請求項1ないし5のいずれかに記載の磁場分布取得装置であって、
前記第1センサ群および前記第2センサ群に含まれる各センサが、薄膜素子であることを特徴とする磁場分布取得装置。
【図2】

【図3】
【図4】
【図5.A】

【図5.B】
【図5.C】

【図5.D】

【図5.E】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図1.A】
【図1.B】
【図1.C】

【図33】

【図3】
【図4】
【図5.A】
【図5.B】
【図5.C】
【図5.D】
【図5.E】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図1.A】
【図1.B】
【図1.C】
【図33】
【公開番号】特開2012−110470(P2012−110470A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−261016(P2010−261016)
【出願日】平成22年11月24日(2010.11.24)
【出願人】(504150450)国立大学法人神戸大学 (421)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月24日(2010.11.24)
【出願人】(504150450)国立大学法人神戸大学 (421)
【Fターム(参考)】
[ Back to top ]