
磁場補正装置及び磁場補正方法
【課題】磁場分布検知器の出し入れを不要とし、且つ、迅速な磁場分布測定を可能とする。
【解決手段】磁場補正装置は、サンプル空間11sの磁場分布を検知する磁場分布検知器2と、サンプル空間11sにおける磁場分布を補正するための磁場補正コイル3と、磁場補正コイル3に電流を印加する電流印加装置と、磁場分布検知器2における検知結果に基づいて電流印加装置を制御する、制御装置(印加電流制御手段)と、を備える。磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21を有している。複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【解決手段】磁場補正装置は、サンプル空間11sの磁場分布を検知する磁場分布検知器2と、サンプル空間11sにおける磁場分布を補正するための磁場補正コイル3と、磁場補正コイル3に電流を印加する電流印加装置と、磁場分布検知器2における検知結果に基づいて電流印加装置を制御する、制御装置(印加電流制御手段)と、を備える。磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21を有している。複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、NMR分光装置における磁場分布の補正技術に関する。
【背景技術】
【0002】
化学分析に用いられるNMR分光装置(Nuclear Magnetic Resonance spectrometer)においては、サンプル(分析対象)が配置される空間(サンプル空間)の磁場均一度が、NMR信号の強度や質に大きく影響する。そこで、サンプル空間の磁場均一度を高めるために、従来、様々な種類の磁場補正手段が用いられている。
【0003】
特許文献1には、サンプル空間を含む球状領域の表面の磁場を、磁場センサーを用いてスキャンする装置が開示されている。この技術では、磁場センサー自体を移動させて磁場の均一度を検知し、その検知結果を用いて、補正コイルにより磁場均一度を高めている。
【0004】
特許文献2には、"Gradient Shimming"という補正方法が開示されている。本方法では、磁場勾配コイル(gradient coil)により、サンプル空間の磁場の空間分布を関数として(例えば2次元濃度画像として)測定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5313164号明細書
【特許文献2】米国特許第7348775号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の技術では、本来の測定対象であるサンプルをNMR装置に挿入する前に、磁場センサーなどの磁場分布測定装置を、NMR装置内に挿入する必要がある。そのため、本技術では、磁場分布測定装置のセッティング・取り外しの作業が必要になり、その分だけ、磁場分布測定から磁場補正までの作業時間が長くなり、また、そのための作業負担が大きくなる。
さらに、本技術においては、磁場測定時に、磁場センサー自体を移動させる時間(スキャン時間)が長いという問題がある。
加えて、本技術においては、磁場分布を測定する際に、本来測定すべきサンプルおよびプローブを取り外す必要がある。
【0007】
特許文献2の技術では、磁場勾配コイル(磁場分布測定装置)がサンプル空間に固定されているので、特許文献1の技術とは異なり、磁場分布測定装置を出し入れする必要がない。
しかし、特許文献2の技術(Gradient Shimming)において、磁場分布の測定精度を高めるには、通常、測定信号を数百回繰り返して取得する必要があり、結果的には、この技術においても、磁場分布測定の時間が長くなる。
【0008】
(課題)
本発明が解決しようとする課題は、磁場分布検知器の出し入れを不要とし、且つ、迅速な磁場分布測定を可能とすることである。
【課題を解決するための手段】
【0009】
(1)上記の課題を解決するために、本発明に係る磁場補正装置は、NMR分光装置の内部における、静磁場が作用するサンプル空間の磁場分布を検知する磁場分布検知器と、前記サンプル空間における磁場分布を補正するための磁場補正コイルと、前記磁場補正コイルに電流を印加する電流印加装置と、前記磁場分布検知器における検知結果に基づいて前記電流印加装置を制御する、印加電流制御手段と、を備える。
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサーを有しており、当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0010】
この構成では、磁場分布検知器の複数のNMR信号センサーが、サンプル空間に設置されているので、磁場分布検知器を出し入れする必要がない。そのため、磁場分布測定から磁場補正までを簡素化できる。
また、複数のNMR信号センサーが、サンプル空間に分布するように設置されているため、磁場分布の測定に際し、センサー自体を移動させる必要がない。そのため、センサー自体を移動(スキャン)させる技術(例えば、特許文献1の技術)に比べて、迅速な磁場分布測定が可能となる。
さらに、本構成では、サンプル空間に分布した複数のNMR信号センサーを用いて、サンプル空間全体の磁場分布情報を迅速に取得できる。そのため、特許文献2の技術(Gradient Shimming)に比べて、迅速な磁場分布測定が可能となる。
【0011】
なお、「サンプル空間」とは、NMR分析用のサンプルが設置され、且つ、静磁場(B0)が作用する空間のことである。本発明に係る磁場補正装置は、このサンプル空間の磁場均一度を高めるために用いられる。
通常、「サンプル空間」は、真空断熱容器が形成する環状空間に囲まれた空間となる。
【0012】
「磁場分布検知器」には、複数のNMR信号センサーと、これらのセンサーを円柱状空間内に設置するための支持手段と、が含まれる。この支持手段は、例えば、円筒状部材であってもよく、また、この外表面又は内表面に、NMR信号センサーが取り付けられてもよい。また、支持手段が、円筒状の格子構造体であってもよい。支持手段の材料としては、体積磁化率|xv|が小さく(|xv|<20e−6[−](SI単位))、且つ、比誘電率εが小さいもの(ε<5[−])が望ましく、例えば、ガラス、プラスチックを利用できる。
また、支持手段は、補正コイルに対してNMR信号センサーを取り付けるための接着剤であってもよい。
【0013】
「磁場補正コイル」は、静磁場発生用のコイル(超電導磁石)とは別のものである。「磁場補正コイル」の材料としては、電気抵抗率ρが低く(ρ<2e−8[Ω・m])、且つ、体積磁化率が小さい(|xv|<20e−6[−])金属が望ましく、例えば、銅、アルミニウムを利用できる。また、磁場補正コイルは、体積磁化率の符号が逆の金属を、体積磁化が全体として「0」になるように組み合わせたものであってもよい。例えば、中心にアルミニウム、アルミニウムの外側に銅を配置し、アルミニウムと銅との断面積比が、それぞれの体積磁化率の絶対値の逆数の比となるようにした構成のクラッド線などを磁場補正コイルとして用いてもよい。
【0014】
「電流印加装置」には、直流電源装置などが含まれる。
「印加電流制御手段」は、電流印加装置を制御して、磁場補正コイルに流れる電流の量を調整する。
【0015】
「NMR信号センサー」には、テスラメーター、フラックスゲート磁束計、RFコイルなどが含まれる。
NMR信号センサーは、磁場補正コイルの径方向内側に配置されてもよいし、径方向外側に配置されてもよい。また、NMR信号センサーは、磁場補正コイルの内部であって、且つ、本来のサンプル(中心サンプル;分析対象サンプル)からはできるだけ離れた位置に配置されることが望ましい。
【0016】
「円柱状空間」については、例えば、真空断熱容器が形成する環状空間に囲まれた空間としてもよいし、磁場補正コイルで囲まれた空間としてもよい。すなわち、「円柱状空間」は、サンプル空間の全部又は一部に相当する。
「円柱状空間内に分布するように設置」とは、複数のNMR信号センサーが、一箇所に集中せず、円柱状空間内に分散して配置されていることを示している。また、NMR信号センサーの「設置」とは、NMR信号センサーが、サンプル空間内に固定されていることを示しており、NMR信号センサーは、サンプル空間内で移動(スキャン動作)することはない。
また、NMR信号センサーは、円柱状空間の内部に設置されていてもよいし、円柱状空間の外郭に沿って(すなわち円筒状に)設置されていてもよい。
【0017】
(2)また、本発明に係る上記(1)の磁場補正装置において、前記複数のNMR信号センサーは、NMR信号を同時期に検知してもよい。
【0018】
この構成では、複数のNMR信号センサーにおいて、NMR信号が一度に検知されるので、迅速な磁場分布測定が可能となる。
【0019】
また、NMR信号を「同時期に検知」するとは、全てのNMR信号センサーにおける検知(総検知時間)が、サンプル空間の磁場変動の周期に比べ、十分短い時間以内に完了することを意味する。サンプル空間の磁場変動は、主にNMR用超電導マグネットの磁場変動によることが多いが、たとえば中心磁場9.4Tのマグネットにおいて、1時間当たり2.5e−8の割合で磁場が減衰するものでは、総検知時間が1秒以内であることが望ましい。
【0020】
(3)また、本発明に係る上記(1)又は(2)の磁場補正装置において、それぞれの前記NMR信号センサーは、箱状のベース部材と、当該ベース部材の表面に設けられた二つのRFコイルと、を有し、前記ベース部材の内部には、NMR信号を発する補正用サンプルが収容される収容空間が形成されており、前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。なお、本発明における「概略直交」とは、「直交」の角度である90°に対して±1°の範囲で交わることを意味する。
【0021】
(4)更に、本発明に係る上記(1)又は(2)の磁場補正装置において、それぞれの前記NMR信号センサーは、円筒状のベース部材と、当該ベース部材の表面に設けられた二つのRFコイルと、を有し、前記ベース部材の内部には、NMR信号を発する補正用サンプルが収容されており、前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。
【0022】
半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサーを、小型センサーとして作成できる。そして、小型のNMR信号センサーを用いることにより、磁場分布検知器において、隣接するセンサーそれぞれが発生するRF磁場の干渉を小さくすることができ、また、プローブ(分析対象サンプルからの信号を取得するためのもの)に与えるRF磁場の影響を低減できる。
【0023】
RFコイルの材料としては、主に、銅、銀、金、アルミニウムを用いることができる。また、コイルが複数層から構成される場合には、層間の接合部に、若干のチタン、クロムなどを用いることができる。
【0024】
NMR信号センサーによって発生する磁場の方向は、静磁場の方向に垂直であればよい。また、NMR信号センサーによる磁場の方向が、静磁場の方向に垂直な面上において、中心軸の周囲に円を描くような方向(静磁場方向に垂直な円の径方向に対して、垂直な方向)に沿った方向であってもよい。
【0025】
(5)また、本発明に係る上記(3)又は(4)の磁場補正装置において、前記ベース部材が、ガラスから成っていてもよい。
【0026】
本構成では、ベース部材がガラスであるため、サンプル空間の磁場が、NMR信号センサーによる磁場の作用を受けにくい。
【0027】
なお、「ガラス」とは、主にケイ酸塩ガラス(石英ガラスなど)であって、ここでの「ガラス」には、水素又は重水素を含まない材料が該当する。
【0028】
(6)また、本発明に係る上記(3)乃至(5)のいずれかの磁場補正装置において、前記二つのRFコイルは、薄膜形成技術を用いて形成されたものであってもよい。
【0029】
この構成では、それぞれのRFコイルが薄膜として形成されるため、サンプル空間の磁場が、RFコイルによる磁場の乱れの影響を受けにくい。
【0030】
「薄膜形成技術」には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィ、めっきなどが含まれる。
【0031】
(7)また、本発明に係る上記(1)乃至(6)のいずれかの磁場補正装置では、前記磁場分布検知器において、前記複数のNMR信号センサーが、前記静磁場の方向に沿って、少なくとも7段になっていてもよい。
【0032】
本構成により、サンプル空間の高さ方向に関する正確な磁場分布の測定が可能となる。そして、その測定結果を用いて、高さ方向に関する、サンプル空間の磁場均一度を高められる。
【0033】
なお、「段」とは、軸方向(静磁場B0の方向)に沿って、層(layer)状に重ねて並べられるものであるとする。それぞれの「段」は、静磁場の方向に垂直な面に対して、平行である。
また、それぞれの「段」には、少なくとも一つのNMR信号センサーが含まれるものとする。すなわち、静磁場の方向に垂直なある面に、少なくとも一つのNMR信号センサーが位置していれば、そのNMR信号センサーは、一つの「段」に含まれる。
【0034】
高さの異なる7つの位置にNMR信号センサーが配置されていれば、静磁場方向に垂直な面上での位置にかかわらず、7段のNMR信号センサーが設けられていることになる。
例えば、7つのNMR信号センサーが、静磁場方向を軸方向として螺旋状に配置されていてもよく、この場合にも、7段のセンサーが設けられていることになる。
【0035】
それぞれの段において、NMR信号センサーは、円周上(静磁場の方向に垂直な円の円周上)に配置されていてもよく、この場合において、円周上のどこに配置されていてもよい。例えば、静磁場方向に関して隣接する「段」におけるNMR信号センサー同士は、静磁場方向に関して隣接していなくてもよい。つまり、異なる段に配置された複数のNMR信号センサーは、円周上における同じ位置(静磁場方向に沿って見たときに重なる位置)に配置されていてもよいし、配置されていなくてもよい。
【0036】
(8)また、本発明に係る上記(7)の磁場補正装置では、前記磁場分布検知器の各段においては、少なくとも8つの前記NMR信号センサーが、前記静磁場に垂直な円の円周上に、等間隔に配置され、前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。
【0037】
この構成により、静磁場に垂直な面において、多くの位置(少なくとも8点)で磁場測定が可能となっている。そのため、各段において、サンプル空間のより正確な磁場分布が得られる。
【0038】
なお、NMR信号センサーによって発生する磁場の方向は、静磁場の方向に垂直であればよい。また、NMR信号センサーによる磁場の方向が、静磁場の方向に垂直な面上において、中心軸の周囲に円を描くような方向(静磁場方向に垂直な円の径方向に対して、垂直な方向)に沿った方向であってもよい。
【0039】
(9)また、本発明に係る上記(8)の磁場補正装置において、前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記円柱状空間の中心軸を通ってもよい。
【0040】
この構成により、複数のNMR信号センサーによって発生する磁場の方向が放射線状になるため、各段においては、面の全体にわたって磁場分布が得られる。そのため、各段において、さらに正確な磁場分布が得られる。
【0041】
(10)また、上記の課題を解決するために、本発明に係る磁場補正方法は、NMR分光装置の内部における、静磁場が作用するサンプル空間の磁場分布を、磁場分布検知器を用いて検知する検知工程と、前記検知工程における検知結果に基づいて、磁場補正コイルに電流を印加して、前記サンプル空間における磁場分布を補正する補正工程と、を備える。
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサーを有しており、当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0042】
この方法により、磁場分布検知器の出し入れが不要となり、且つ、迅速な磁場分布測定が可能となる。
【図面の簡単な説明】
【0043】
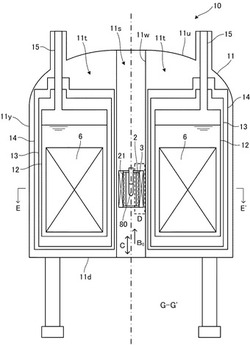
【図1】本発明の一実施形態に係るNMR分光装置を示す断面概略図である。
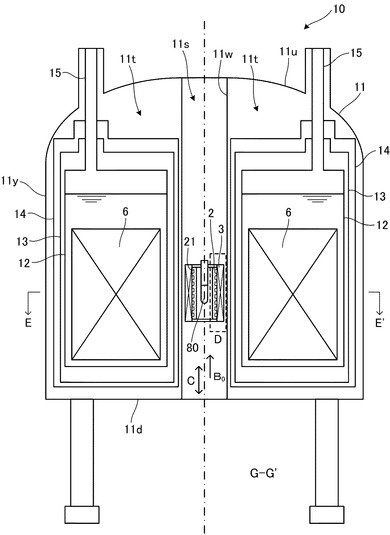
【図2】図1のE−E’断面図である。
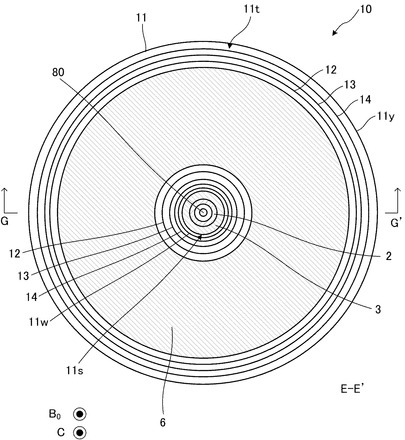
【図3】磁場分布検知器の構造を示す図であり、(a)はA−A’断面図、(b)は側面図、(c)は図1の破線部Dの拡大図である。
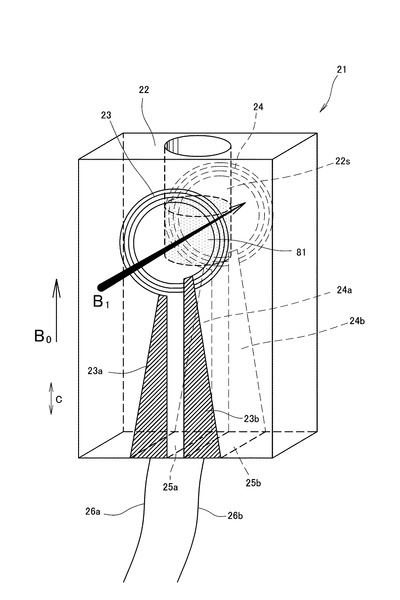
【図4】NMR信号センサーの斜視概略図である。
【図5】(a)は金属薄膜部分の斜視図であり、(b)はNMR信号センサーの平面図(上面図)であり、(c)はNMR信号センサーの右側面図である。
【図6】本発明の一実施形態に係る磁場補正装置の概略図である。
【図7】NMR信号センサーの斜視概略図である。
【発明を実施するための形態】
【0044】
以下、本発明の一実施形態について説明する。なお、以下の説明における高さ方向は、図中における高さ方向であるものとする。また、図1は、図2のG−G’断面図に相当する。
【0045】
(NMR分光装置)
本実施形態に係るNMR分光装置10は、真空断熱容器11、及び超電導磁石6を備える。真空断熱容器11は、内壁11w、外壁11y、天井壁11u及び床壁11dを有する。内壁11w及び外壁11yは、それぞれ円筒状に形成されており、外壁11yの内径よりも内壁11wの外径が小さい。そして、内壁11w及び外壁11yは、同心に配置されている。
また、内壁11wの内部空間が、真空断熱容器11の外部と連通する円柱状のサンプル空間11sとなっており、内壁11wと外壁11yと天井壁11uと床壁11dとで囲まれた空間が、真空断熱容器11の外部から隔離され、真空にされた環状のコイル空間11tとなっている。
【0046】
コイル空間11tは低温空間であり、サンプル空間11sは室温空間である。真空断熱容器11の内壁11wによって、低温空間(コイル空間11t)と室温空間(サンプル空間11s)とが隔てられている。また、サンプル空間11sの中心には、サンプル80が配置される。サンプル80は、NMR分析用サンプル(分析対象サンプル)であり、具体的にはサンプル液を含むアンプルである。サンプル80の中心軸は、サンプル空間11sの中心軸に一致する(図1の一点鎖線参照)。
【0047】
超電導磁石(超電導電磁石)6は、静磁場(B0)を発生させるためのものであり、コイル空間11tに設けられた液体ヘリウム槽12内に収容されて、液体ヘリウムに浸漬されている。
液体ヘリウム槽12は、2つの熱輻射シールド13,14により2重に覆われている。液体ヘリウム槽12から気化したヘリウムガスは、首管15を通って外部に排出される。
ここで、静磁場B0の方向を、軸方向Cとする(図の矢印C方向参照)。軸方向Cは、サンプル空間11sの「高さ方向」に相当している。また、超電導磁石6には、磁場分布を粗調整するための超電導シムコイル(図示せず)が備えられている。
【0048】
(磁場補正装置)
磁場補正装置1は、サンプル空間11sにおける磁場分布を補正する装置であり、サンプル空間11sの磁場均一度(より詳細には、磁場補正コイル3の内部空間における磁場均一度)を高めるために用いられる。磁場補正装置1は、磁場分布検知器2、磁場補正コイル3、電流印加装置4、及び制御装置5を有する(図1及び図6参照)。以下、各部について説明する。
【0049】
(磁場分布検知器)
図3を用いて、磁場分布検知器2について説明する。磁場分布検知器2は、サンプル空間11sの磁場分布を検知するものであり、磁場分布検知器2には、複数のNMR信号センサー21と、支持部材(支持手段)27とが含まれる。
【0050】
支持部材27は、複数のNMR信号センサー21を円柱状空間内に設置するためのものであり、円筒状に形成されている。支持部材27は、FRP(Fiber Reinforced Plastic)製であり、磁場補正コイル3の内部(径方向に関して内側)に配置されている。そして、複数のNMR信号センサー21は、支持部材27に対して固定された状態になっている。また、複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0051】
ここで、「円柱状空間」は、磁場補正コイル3で囲まれた空間に相当する。また、円柱状空間の中心軸は、サンプル空間11sの中心軸に一致する(図1の一点鎖線参照)。さらに、円柱状空間の中心軸は、サンプル80の中心軸に一致する。また、サンプル80は、磁場分布検知器2で囲まれた空間に配置され、且つ、サンプル80のサンプル液は、軸方向Cに関して、磁場分布検知器2の中央付近に位置する(図1参照)。
【0052】
また、複数のNMR信号センサー21は、支持部材27の外面に埋められた状態になっている。そして、複数のNMR信号センサー21の表面位置は、支持部材27の表面位置に一致している。
なお、NMR信号センサー21は、支持部材27の表面から突出していてもよいし、また、支持部材27の内部(厚み方向に関して、露出しない位置)に配置されていてもよい。
【0053】
磁場分布検知器2は、96個のNMR信号センサー21を有する。具体的には、複数のNMR信号センサー21は、高さ方向に関して、8段になっており、(図3(b)参照)、且つ、それぞれの「段」には、12個のNMR信号センサー21が含まれる(図3(a)の断面図参照)。ここで、それぞれの「段」は、静磁場B0に対して垂直な面に対して平行であり、また、複数の「段」は、軸方向Cに沿って、層状に重ねて並べられている(「段」については、図3(b)の破線部参照)。
【0054】
また、磁場分布検知器2の各段においては、12個のNMR信号センサー21が、静磁場B0に垂直な円の円周上に、等間隔に配置されている(図3(a)参照)。そして、磁場分布検知器2の各段において、全てのNMR信号センサー21によって発生する磁場B1の方向は、静磁場B0の方向に概略直交する。また、磁場分布検知器2の各段において、全てのNMR信号センサー21によって発生する磁場B1の方向は、円柱状空間の中心軸を通る(図3(a)参照)。
なお、全てのNMR信号センサー21には、交流電流が流される。そのため、磁場B1の方向は、拡散方向(中心軸から外側へ向かう方向;図3(a)参照)と、その逆の求心方向(中心軸に向かう方向)とで、交互に変化する。
【0055】
(NMR信号センサー)
次に、図4及び図5を用いてNMR信号センサー21の詳細について説明する。なお、図5は、NMR信号センサー21の、RFコイルを含む金属薄膜部分のみを示した図である。
【0056】
複数のNMR信号センサー21は、サンプル空間11sに位置している。また、複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。すなわち、複数のNMR信号センサー21は、一箇所に集中せず、円柱状空間内に分散して配置されている。また、複数のNMR信号センサー21は、NMR信号を同時期に検知する。
【0057】
以下、それぞれのNMR信号センサー21について説明する。NMR信号センサー21は、箱状のベース部材22と、二つのRFコイル(第1RFコイル23及び第2RFコイル24)とを有する。
【0058】
ベース部材22は、ガラスから成る。また、ベース部材22の内部には、円柱状の収容空間22sが形成されており、この収容空間22sには、NMR信号を発する補正用サンプル81が収容されている。補正用サンプル81は液状サンプルであり、水素又は重水素を含む。
【0059】
二つのRFコイルは、薄膜形成技術(スパッタリングなど)を用いて、ベース部材22の表面に設けられている。二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交する(図4参照)。以下、その詳細について説明する。
【0060】
それぞれのNMR信号センサー21において、二つのRFコイルは、同じ方向に巻かれて形成されている。第1RFコイル23の両端からは、支持部23a及び支持部23bが延びており、第2RFコイル24の両端からは、支持部24a及び支持部24bが延びている。これらの支持部は、台形状の薄膜である。また、支持部23a及び支持部24aは、連結部25aによって連結されており、支持部23b及び支持部24bは、連結部25bによって連結されている。連結部25a及び連結部25bは、長方形の薄膜である。
【0061】
また、連結部25aには、導線26aが接続されており、連結部25bには、導線26bが接続されている。例えば、導線26aから連結部25aに電流が流されると、その電流は、支持部23a及び支持部24aに分岐して流れる。そして、一方では、電流が、支持部23a及び第1RFコイル23を通って、支持部23bから連結部25bへ流れ、他方では、電流が支持部24a及び第2RFコイル24を通って、支持部24bから連結部25bへ流れる。その後、電流は、連結部25bから、導線26bに流れる。このように、導線26aから連結部25aに電流が流された場合には、第1RFコイル23から第2RFコイル24へ向かって、磁場B1が発生する(図4参照)。
なお、導線26bから連結部25bに電流が流された場合には、これとは逆に、第2RFコイル24から第1RFコイル23へ向かって、磁場B1が発生する。いずれの場合においても、磁場B1は、NMR信号センサー21の正面(又は背面)に対して垂直な方向に生じる。
【0062】
NMR信号センサー21の二つのRFコイルにおいて、高周波磁場(回転磁場)が発生する。この高周波磁場の周波数は、補正用サンプル81に含まれる原子核のスピンが静磁場B0の中で持つラーモア周波数と同じである。これにより、補正用サンプル81に含まれる原子核に、いわゆる共鳴現象が起き、高周波磁場のエネルギーが吸収される。
【0063】
また、半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサー21は、小型センサーとして製造されている。
【0064】
(他のNMR信号センサー)
次に、図7を用いて他のNMR信号センサー31の詳細について説明する。なお、先に説明したNMR信号センサー21との違いについてのみ説明する。
【0065】
NMR信号センサー31は、図7に示すように、円柱状のベース部材32と、二つのRFコイル(第1RFコイル33及び第2RFコイル34)とを有する。また、NMR信号センサー31には、後述する共振回路56が電気的に接続されている。NMR信号センサー31の直径Dsは、0.3〜1mmである。
【0066】
ベース部材32は、両端が封止されたガラス管となっている。また、ベース部材32の内部には、補正用サンプル81が封入されている。二つのRFコイルは、薄膜形成技術(スパッタリングなど)を用いて、ベース部材32の表面に設けられている。
【0067】
(磁場補正コイル)
図6に戻って、次に、磁場補正コイル3について説明する。磁場補正コイル3は、サンプル空間11sにおける磁場分布を補正するためのコイルである。磁場補正コイル3は、アルミニウム製コイル及び銅製コイルを組み合わせて形成されている。また、磁場補正コイル3は、マトリックスシムとして構成されている。
【0068】
(電流印加装置)
電流印加装置(シム電源)4は、磁場補正コイル3に電流を印加するものであり、具体的には、直流電源装置である。電流印加装置4は、磁場補正コイル3に対して電気的に接続されている。
【0069】
(制御装置)
制御装置(印加電流制御手段)5には、制御ユニット51、RF送信ユニット52、RF受信ユニット53、送受信切替スイッチ54、切替スイッチ55、及び、複数の共振回路(第1共振回路56a、第2共振回路56b、第96共振回路56zなど)が含まれる。
【0070】
制御ユニット51は、電流印加装置4に対して電気的に接続されている。制御ユニット51は、磁場分布検知器2における検知結果に基づいて電流印加装置4を制御する。より具体的には、制御ユニット51は、検知結果に基づき、電流印加装置4を制御して、磁場補正コイル3に流れる電流の量を調整する。
【0071】
また、制御ユニット51には、CPU(CentralProcessing Unit)、及び、記憶装置(RAM(Random Access Memory)、ROM(Read Only Memory)、ハードディスクなど)が含まれる。
【0072】
送受信切替スイッチ54は、RFコイルの送受信動作を切り換えるためのものである。切替スイッチ55は、制御ユニット51に対して、送受信切替スイッチ54、及び、RF送信ユニット52(又はRF受信ユニット53)を介して、電気的に接続されている。そして、切替スイッチ55は、各共振回路と、制御ユニット51との接続状態を切り換えるために用いられる。
【0073】
制御装置5には、96個の共振回路が設けられており、これらの共振回路のそれぞれは、96個のNMR信号センサー21,31のそれぞれに対応して設けられている。なお、図においては、第3乃至第95共振回路を省略している。
【0074】
これらの共振回路には、直列共振回路(コンデンサとコイルとが直列に接続された回路)と並列共振回路(コンデンサとコイルとが並列に接続された回路)とが含まれており、同調およびRF送信ユニット52からの電力を反射なくRFコイルに伝達するためのマッチング回路を成している。これらの共振回路は、静磁場B0の作用下において、補正用サンプル81のNMR共鳴周波数(ラーモア周波数)付近で共振するように予め設定(粗調整)されている。
【0075】
これらの複数の共振回路は、切替スイッチ55及び送受信切替スイッチ54を介して、RF送信ユニット52及びRF受信ユニット53に接続されている。そして、あるNMR信号センサー21,31(n番目のセンサー)において、RF信号の送信及び受信が行なわれると、次に、その次のNMR信号センサー21,31(n+1番目のセンサー)において、RF信号の送信及び受信が行なわれる。このようにして、96個のNMR信号センサー21,31における送信及び受信は、連続的(シリアル)に行なわれる。
【0076】
それぞれのNMR信号センサー21,31を用いることにより、各センサー位置での共鳴周波数が取得される。そして、取得された共鳴周波数から、制御ユニット51において、各センサー位置での磁場が求められ、これにより、サンプル空間11sの磁場分布が得られる。また、制御ユニット51では、このようにして得られた磁場分布から、磁場を均一化するための、磁場補正コイル3に流す電流の値が算出される。そして、この算出された電流値を用いて、磁場補正コイル3により、サンプル空間11sの磁場補正が行なわれる。
【0077】
(磁場補正方法)
次に、磁場補正装置1を用いた磁場補正方法について説明する。まず、NMR分光装置(10)の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を、磁場分布検知器2を用いて検知する(検知工程)。具体的には、制御ユニット51が、96個のNMR信号センサー21,31の、それぞれの位置における共鳴周波数を取得し、その値から、各位置での磁場(磁束密度)を求める。また、本工程では、複数のNMR信号センサー21,31は、NMR信号を同時期に検知する。すなわち、各NMR信号センサー21,31における検知時間が100msecであり、96個のNMR信号センサー21,31における検知が、短時間(9600msec)で完了する。
【0078】
次に、検知工程における検知結果に基づいて、磁場補正コイル3に電流を印加し、サンプル空間11sにおける磁場分布を補正する(補正工程)。具体的には、制御ユニット51が、検知工程で得られたサンプル空間11sの磁場分布(空間分布)を用いて、磁場補正コイル3に対して印加する電流の値を計算する。そして、制御ユニット51が、電流印加装置4を制御して、計算された電流値に従って、磁場補正コイル3に電流を印加する。以上のようにして、磁場補正が行なわれ、サンプル空間11sの磁場分布が均一化される。
【0079】
(印加電流値の計算例)
ここで、補正工程における印加電流値の計算例について説明する。
まず、サンプル80の中心を原点とした場合に、原点の周囲の磁場分布BZ(r、θ、φ)は、次式のように表わされる。
【数1】

【0080】
この式2において、Pnm(cosθ)は、Legendre多項式を表わす。また、式2のように、磁場分布BZは、Legendre多項式の係数であるA0、Anm、及びBnm を用いて表わすことができる。ここで、A0、Anm、及びBnm をまとめてCiと記す。
【0081】
磁場補正コイル3が、軸方向に沿って並べられたj個のコイルから構成されているとする。この場合に、それぞれのコイルに、i番目の磁場成分として、単位電流に対して、Mijを発生するとした場合に、j個のコイルに流される電流値から成る配列Ijに対して、次の連立方程式が成立する。
【数2】
【0082】
この式3の連立方程式を解き、その解として電流値配列Ijを求める。そして、得られたIjのそれぞれの、逆符号の電流値(Ijのそれぞれの電流値に−1を乗じた後の値)が、印加される電流値の増減分になる。この計算された印加電流値に従って、電流を磁場補正コイル3に流せば、磁場補正が完了する。
【0083】
(効果)
次に、本実施形態に係る磁場補正装置1及び磁場補正方法により得られる効果について説明する。磁場補正装置1は、NMR分光装置10の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を検知する磁場分布検知器2と、サンプル空間11sにおける磁場分布を補正するための磁場補正コイル3と、磁場補正コイル3に電流を印加する電流印加装置4と、磁場分布検知器2における検知結果に基づいて電流印加装置4を制御する、制御装置(印加電流制御手段)5と、を備える。
磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21,31を有しており、当該複数のNMR信号センサー21,31は、静磁場B0の方向を軸方向(軸方向C)とする円柱状空間内に分布するように設置されている。
【0084】
この構成では、磁場分布検知器2の複数のNMR信号センサー21,31が、サンプル空間11sに設置されているので、磁場分布検知器2を出し入れする必要がない。そのため、磁場分布測定から磁場補正までを簡素化できる。
また、複数のNMR信号センサー21,31が、サンプル空間11sに分布するように設置されているため、磁場分布の測定に際し、センサー自体を移動させる必要がない。そのため、センサー自体を移動(スキャン)させる技術(例えば、特許文献1の技術)に比べて、迅速な磁場分布測定が可能となる。
さらに、本構成では、サンプル空間11sに分布した複数のNMR信号センサー21,31を用いて、サンプル空間11sの全体の磁場分布情報を迅速に取得できる。そのため、特許文献2の技術(Gradient Shimming)に比べて、迅速な磁場分布測定が可能となる。
【0085】
また、磁場補正装置1において、複数のNMR信号センサー21,31は、NMR信号を同時期に検知する。
この構成では、複数のNMR信号センサー21,31において、NMR信号が一度に検知されるので、迅速な磁場分布測定が可能となる。
【0086】
また、磁場補正装置1において、それぞれのNMR信号センサー21は、箱状のベース部材22と、当該ベース部材22の表面に設けられた二つのRFコイル(第1RFコイル23、及び第2RFコイル24)と、を有し、ベース部材22の内部には、NMR信号を発する補正用サンプル81が収容される収容空間22sが形成されており、二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0087】
また、磁場補正装置1において、それぞれのNMR信号センサー31は、円筒状のベース部材32と、当該ベース部材32の表面に設けられた二つのRFコイル(第1RFコイル33、及び第2RFコイル34)と、を有し、ベース部材32の内部には、NMR信号を発する補正用サンプル81が収容されており、二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0088】
半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサー21,31を、小型センサーとして作成できる。そして、小型のNMR信号センサー21,31を用いることにより、磁場分布検知器2において、隣接センサー間での磁場の干渉を小さくすることができ、また、プローブ(分析対象サンプルからの信号を取得するためのもの)に与える磁場の影響を低減できる。
【0089】
また、磁場補正装置1においては、ベース部材22,32が、ガラスから成っている。
本構成では、ベース部材22,32がガラスであるため、サンプル空間11sの磁場が、NMR信号センサー21,31により乱される量が少ない。
【0090】
また、磁場補正装置1において、二つのRFコイルは、薄膜形成技術を用いて形成されたものである。
この構成では、それぞれのRFコイルが薄膜として形成されるため、サンプル空間11sの磁場が、RFコイルにより乱される量が少ない。
【0091】
また、磁場補正装置1では、磁場分布検知器2において、複数のNMR信号センサー21が、静磁場B0の方向に沿って、8段になっている。
【0092】
本構成により、サンプル空間11sの高さ方向に関する正確な磁場分布の測定が可能となる。そして、その測定結果を用いて、高さ方向に関する、サンプル空間11sの磁場均一度を高められる。
【0093】
また、磁場補正装置1では、磁場分布検知器2の各段においては、12個のNMR信号センサーが、静磁場B0に垂直な円の円周上に、等間隔に配置され、磁場分布検知器2の各段における、全てのNMR信号センサー21,31によって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0094】
この構成により、静磁場B0に垂直な面において、多くの位置で磁場測定が可能となっている。そのため、各段において、サンプル空間11sのより正確な磁場分布が得られる。
【0095】
また、磁場補正装置1において、磁場分布検知器2の各段における、全てのNMR信号センサー21,31によって発生する磁場B1の方向は、円柱状空間の中心軸を通る。
【0096】
この構成により、複数のNMR信号センサー21,31によって発生する磁場B1の方向が放射線状になるため、各段においては、面の全体にわたって磁場分布が得られる。そのため、各段において、さらに正確な磁場分布が得られる。
【0097】
また、本実施形態に係る磁場補正方法は、NMR分光装置10の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を、磁場分布検知器2を用いて検知する検知工程と、検知工程における検知結果に基づいて、磁場補正コイル3に電流を印加して、サンプル空間11sにおける磁場分布を補正する補正工程と、を備える。
磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21,31を有しており、当該複数のNMR信号センサー21,31は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0098】
この方法により、磁場分布検知器2の出し入れが不要となり、且つ、迅速な磁場分布測定が可能となる。
【0099】
(その他の効果)
また、磁場分布検知器2においては、NMR信号センサー21,31が8段になっており、各段に12個のNMR信号センサー21,31が配置されている。そして、96個のNMR信号センサー21,31が、円筒状に配置されており、且つ、サンプル80のサンプル液が、軸方向Cに関して、磁場分布検知器2の中央付近に位置する。そのため、本構成により、高い精度での磁場分布測定が可能となっている。
【0100】
また、NMR信号センサー21,31が、薄膜形成技術を用いて形成されているため、NMR信号センサー21,31の全体の厚さを、1mm未満にすることができる。そのため、例えば、支持部材27の厚さを約1mmにして、NMR信号センサー21,31を支持部材27の厚み方向で完全に埋設した形に設置できる。
【0101】
また、上記の特許文献1の技術では、磁場補正を行うべき対象空間内に、磁場測定装置を新たに挿入するため、磁場測定装置の磁化そのものが測定対象空間の磁場に誤差を生じせしめる可能性がある。一方、磁場補正装置1では、磁場補正対象空間内に、新たに磁場測定装置を挿入することがないため、その心配がない。
【0102】
また、上記の特許文献2の技術では、サンプル空間の磁場分布画像を得るためには、磁場勾配の反転走査が必要となり、この結果、渦電流によって一時的に磁場が不均一な状態となる可能性がある。一方、磁場補正装置1では、磁場勾配の反転走査が不要であり、磁場が不均一になる問題が生じ難い。
【0103】
(他の実施形態について)
本発明の実施の形態は、上記の実施形態には限られない。例えば、複数のNMR信号センサーが、各段に一つのみ配置され、且つ、複数の信号センサー全体としては、静磁場B0を軸方向として、螺旋状に配置されていてもよい。
【0104】
また、上記の実施形態においては、磁場分布検知器2が、磁場補正コイル3の内面に接触している。しかし、磁場分布検知器と、磁場補正コイルとは、接触していなくてもよい。
【産業上の利用可能性】
【0105】
本発明は、NMR分光装置の磁場分布補正に適用できる。
【符号の説明】
【0106】
1 磁場補正装置
2 磁場分布検知器
21,31 NMR信号センサー
22,32 ベース部材
22s 収容空間
23,33 RFコイル
24,34 RFコイル
25a、25b 連結部
26a、26b 導線
27 支持部材
3 磁場補正コイル
4 電流印加装置
5 制御装置(印加電流制御手段)
51 制御ユニット
52 RF送信ユニット
53 RF受信ユニット
54 送受信切替スイッチ
55 切替スイッチ
56、56a、56b、56z 共振回路
6 超電導磁石
10 NMR分光装置
11 真空断熱容器
11s サンプル空間
11t コイル空間
11w 内壁
11y 外壁
80 サンプル
81 補正用サンプル
【技術分野】
【0001】
本発明は、NMR分光装置における磁場分布の補正技術に関する。
【背景技術】
【0002】
化学分析に用いられるNMR分光装置(Nuclear Magnetic Resonance spectrometer)においては、サンプル(分析対象)が配置される空間(サンプル空間)の磁場均一度が、NMR信号の強度や質に大きく影響する。そこで、サンプル空間の磁場均一度を高めるために、従来、様々な種類の磁場補正手段が用いられている。
【0003】
特許文献1には、サンプル空間を含む球状領域の表面の磁場を、磁場センサーを用いてスキャンする装置が開示されている。この技術では、磁場センサー自体を移動させて磁場の均一度を検知し、その検知結果を用いて、補正コイルにより磁場均一度を高めている。
【0004】
特許文献2には、"Gradient Shimming"という補正方法が開示されている。本方法では、磁場勾配コイル(gradient coil)により、サンプル空間の磁場の空間分布を関数として(例えば2次元濃度画像として)測定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5313164号明細書
【特許文献2】米国特許第7348775号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の技術では、本来の測定対象であるサンプルをNMR装置に挿入する前に、磁場センサーなどの磁場分布測定装置を、NMR装置内に挿入する必要がある。そのため、本技術では、磁場分布測定装置のセッティング・取り外しの作業が必要になり、その分だけ、磁場分布測定から磁場補正までの作業時間が長くなり、また、そのための作業負担が大きくなる。
さらに、本技術においては、磁場測定時に、磁場センサー自体を移動させる時間(スキャン時間)が長いという問題がある。
加えて、本技術においては、磁場分布を測定する際に、本来測定すべきサンプルおよびプローブを取り外す必要がある。
【0007】
特許文献2の技術では、磁場勾配コイル(磁場分布測定装置)がサンプル空間に固定されているので、特許文献1の技術とは異なり、磁場分布測定装置を出し入れする必要がない。
しかし、特許文献2の技術(Gradient Shimming)において、磁場分布の測定精度を高めるには、通常、測定信号を数百回繰り返して取得する必要があり、結果的には、この技術においても、磁場分布測定の時間が長くなる。
【0008】
(課題)
本発明が解決しようとする課題は、磁場分布検知器の出し入れを不要とし、且つ、迅速な磁場分布測定を可能とすることである。
【課題を解決するための手段】
【0009】
(1)上記の課題を解決するために、本発明に係る磁場補正装置は、NMR分光装置の内部における、静磁場が作用するサンプル空間の磁場分布を検知する磁場分布検知器と、前記サンプル空間における磁場分布を補正するための磁場補正コイルと、前記磁場補正コイルに電流を印加する電流印加装置と、前記磁場分布検知器における検知結果に基づいて前記電流印加装置を制御する、印加電流制御手段と、を備える。
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサーを有しており、当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0010】
この構成では、磁場分布検知器の複数のNMR信号センサーが、サンプル空間に設置されているので、磁場分布検知器を出し入れする必要がない。そのため、磁場分布測定から磁場補正までを簡素化できる。
また、複数のNMR信号センサーが、サンプル空間に分布するように設置されているため、磁場分布の測定に際し、センサー自体を移動させる必要がない。そのため、センサー自体を移動(スキャン)させる技術(例えば、特許文献1の技術)に比べて、迅速な磁場分布測定が可能となる。
さらに、本構成では、サンプル空間に分布した複数のNMR信号センサーを用いて、サンプル空間全体の磁場分布情報を迅速に取得できる。そのため、特許文献2の技術(Gradient Shimming)に比べて、迅速な磁場分布測定が可能となる。
【0011】
なお、「サンプル空間」とは、NMR分析用のサンプルが設置され、且つ、静磁場(B0)が作用する空間のことである。本発明に係る磁場補正装置は、このサンプル空間の磁場均一度を高めるために用いられる。
通常、「サンプル空間」は、真空断熱容器が形成する環状空間に囲まれた空間となる。
【0012】
「磁場分布検知器」には、複数のNMR信号センサーと、これらのセンサーを円柱状空間内に設置するための支持手段と、が含まれる。この支持手段は、例えば、円筒状部材であってもよく、また、この外表面又は内表面に、NMR信号センサーが取り付けられてもよい。また、支持手段が、円筒状の格子構造体であってもよい。支持手段の材料としては、体積磁化率|xv|が小さく(|xv|<20e−6[−](SI単位))、且つ、比誘電率εが小さいもの(ε<5[−])が望ましく、例えば、ガラス、プラスチックを利用できる。
また、支持手段は、補正コイルに対してNMR信号センサーを取り付けるための接着剤であってもよい。
【0013】
「磁場補正コイル」は、静磁場発生用のコイル(超電導磁石)とは別のものである。「磁場補正コイル」の材料としては、電気抵抗率ρが低く(ρ<2e−8[Ω・m])、且つ、体積磁化率が小さい(|xv|<20e−6[−])金属が望ましく、例えば、銅、アルミニウムを利用できる。また、磁場補正コイルは、体積磁化率の符号が逆の金属を、体積磁化が全体として「0」になるように組み合わせたものであってもよい。例えば、中心にアルミニウム、アルミニウムの外側に銅を配置し、アルミニウムと銅との断面積比が、それぞれの体積磁化率の絶対値の逆数の比となるようにした構成のクラッド線などを磁場補正コイルとして用いてもよい。
【0014】
「電流印加装置」には、直流電源装置などが含まれる。
「印加電流制御手段」は、電流印加装置を制御して、磁場補正コイルに流れる電流の量を調整する。
【0015】
「NMR信号センサー」には、テスラメーター、フラックスゲート磁束計、RFコイルなどが含まれる。
NMR信号センサーは、磁場補正コイルの径方向内側に配置されてもよいし、径方向外側に配置されてもよい。また、NMR信号センサーは、磁場補正コイルの内部であって、且つ、本来のサンプル(中心サンプル;分析対象サンプル)からはできるだけ離れた位置に配置されることが望ましい。
【0016】
「円柱状空間」については、例えば、真空断熱容器が形成する環状空間に囲まれた空間としてもよいし、磁場補正コイルで囲まれた空間としてもよい。すなわち、「円柱状空間」は、サンプル空間の全部又は一部に相当する。
「円柱状空間内に分布するように設置」とは、複数のNMR信号センサーが、一箇所に集中せず、円柱状空間内に分散して配置されていることを示している。また、NMR信号センサーの「設置」とは、NMR信号センサーが、サンプル空間内に固定されていることを示しており、NMR信号センサーは、サンプル空間内で移動(スキャン動作)することはない。
また、NMR信号センサーは、円柱状空間の内部に設置されていてもよいし、円柱状空間の外郭に沿って(すなわち円筒状に)設置されていてもよい。
【0017】
(2)また、本発明に係る上記(1)の磁場補正装置において、前記複数のNMR信号センサーは、NMR信号を同時期に検知してもよい。
【0018】
この構成では、複数のNMR信号センサーにおいて、NMR信号が一度に検知されるので、迅速な磁場分布測定が可能となる。
【0019】
また、NMR信号を「同時期に検知」するとは、全てのNMR信号センサーにおける検知(総検知時間)が、サンプル空間の磁場変動の周期に比べ、十分短い時間以内に完了することを意味する。サンプル空間の磁場変動は、主にNMR用超電導マグネットの磁場変動によることが多いが、たとえば中心磁場9.4Tのマグネットにおいて、1時間当たり2.5e−8の割合で磁場が減衰するものでは、総検知時間が1秒以内であることが望ましい。
【0020】
(3)また、本発明に係る上記(1)又は(2)の磁場補正装置において、それぞれの前記NMR信号センサーは、箱状のベース部材と、当該ベース部材の表面に設けられた二つのRFコイルと、を有し、前記ベース部材の内部には、NMR信号を発する補正用サンプルが収容される収容空間が形成されており、前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。なお、本発明における「概略直交」とは、「直交」の角度である90°に対して±1°の範囲で交わることを意味する。
【0021】
(4)更に、本発明に係る上記(1)又は(2)の磁場補正装置において、それぞれの前記NMR信号センサーは、円筒状のベース部材と、当該ベース部材の表面に設けられた二つのRFコイルと、を有し、前記ベース部材の内部には、NMR信号を発する補正用サンプルが収容されており、前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。
【0022】
半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサーを、小型センサーとして作成できる。そして、小型のNMR信号センサーを用いることにより、磁場分布検知器において、隣接するセンサーそれぞれが発生するRF磁場の干渉を小さくすることができ、また、プローブ(分析対象サンプルからの信号を取得するためのもの)に与えるRF磁場の影響を低減できる。
【0023】
RFコイルの材料としては、主に、銅、銀、金、アルミニウムを用いることができる。また、コイルが複数層から構成される場合には、層間の接合部に、若干のチタン、クロムなどを用いることができる。
【0024】
NMR信号センサーによって発生する磁場の方向は、静磁場の方向に垂直であればよい。また、NMR信号センサーによる磁場の方向が、静磁場の方向に垂直な面上において、中心軸の周囲に円を描くような方向(静磁場方向に垂直な円の径方向に対して、垂直な方向)に沿った方向であってもよい。
【0025】
(5)また、本発明に係る上記(3)又は(4)の磁場補正装置において、前記ベース部材が、ガラスから成っていてもよい。
【0026】
本構成では、ベース部材がガラスであるため、サンプル空間の磁場が、NMR信号センサーによる磁場の作用を受けにくい。
【0027】
なお、「ガラス」とは、主にケイ酸塩ガラス(石英ガラスなど)であって、ここでの「ガラス」には、水素又は重水素を含まない材料が該当する。
【0028】
(6)また、本発明に係る上記(3)乃至(5)のいずれかの磁場補正装置において、前記二つのRFコイルは、薄膜形成技術を用いて形成されたものであってもよい。
【0029】
この構成では、それぞれのRFコイルが薄膜として形成されるため、サンプル空間の磁場が、RFコイルによる磁場の乱れの影響を受けにくい。
【0030】
「薄膜形成技術」には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィ、めっきなどが含まれる。
【0031】
(7)また、本発明に係る上記(1)乃至(6)のいずれかの磁場補正装置では、前記磁場分布検知器において、前記複数のNMR信号センサーが、前記静磁場の方向に沿って、少なくとも7段になっていてもよい。
【0032】
本構成により、サンプル空間の高さ方向に関する正確な磁場分布の測定が可能となる。そして、その測定結果を用いて、高さ方向に関する、サンプル空間の磁場均一度を高められる。
【0033】
なお、「段」とは、軸方向(静磁場B0の方向)に沿って、層(layer)状に重ねて並べられるものであるとする。それぞれの「段」は、静磁場の方向に垂直な面に対して、平行である。
また、それぞれの「段」には、少なくとも一つのNMR信号センサーが含まれるものとする。すなわち、静磁場の方向に垂直なある面に、少なくとも一つのNMR信号センサーが位置していれば、そのNMR信号センサーは、一つの「段」に含まれる。
【0034】
高さの異なる7つの位置にNMR信号センサーが配置されていれば、静磁場方向に垂直な面上での位置にかかわらず、7段のNMR信号センサーが設けられていることになる。
例えば、7つのNMR信号センサーが、静磁場方向を軸方向として螺旋状に配置されていてもよく、この場合にも、7段のセンサーが設けられていることになる。
【0035】
それぞれの段において、NMR信号センサーは、円周上(静磁場の方向に垂直な円の円周上)に配置されていてもよく、この場合において、円周上のどこに配置されていてもよい。例えば、静磁場方向に関して隣接する「段」におけるNMR信号センサー同士は、静磁場方向に関して隣接していなくてもよい。つまり、異なる段に配置された複数のNMR信号センサーは、円周上における同じ位置(静磁場方向に沿って見たときに重なる位置)に配置されていてもよいし、配置されていなくてもよい。
【0036】
(8)また、本発明に係る上記(7)の磁場補正装置では、前記磁場分布検知器の各段においては、少なくとも8つの前記NMR信号センサーが、前記静磁場に垂直な円の円周上に、等間隔に配置され、前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記静磁場の方向に概略直交してもよい。
【0037】
この構成により、静磁場に垂直な面において、多くの位置(少なくとも8点)で磁場測定が可能となっている。そのため、各段において、サンプル空間のより正確な磁場分布が得られる。
【0038】
なお、NMR信号センサーによって発生する磁場の方向は、静磁場の方向に垂直であればよい。また、NMR信号センサーによる磁場の方向が、静磁場の方向に垂直な面上において、中心軸の周囲に円を描くような方向(静磁場方向に垂直な円の径方向に対して、垂直な方向)に沿った方向であってもよい。
【0039】
(9)また、本発明に係る上記(8)の磁場補正装置において、前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記円柱状空間の中心軸を通ってもよい。
【0040】
この構成により、複数のNMR信号センサーによって発生する磁場の方向が放射線状になるため、各段においては、面の全体にわたって磁場分布が得られる。そのため、各段において、さらに正確な磁場分布が得られる。
【0041】
(10)また、上記の課題を解決するために、本発明に係る磁場補正方法は、NMR分光装置の内部における、静磁場が作用するサンプル空間の磁場分布を、磁場分布検知器を用いて検知する検知工程と、前記検知工程における検知結果に基づいて、磁場補正コイルに電流を印加して、前記サンプル空間における磁場分布を補正する補正工程と、を備える。
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサーを有しており、当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0042】
この方法により、磁場分布検知器の出し入れが不要となり、且つ、迅速な磁場分布測定が可能となる。
【図面の簡単な説明】
【0043】
【図1】本発明の一実施形態に係るNMR分光装置を示す断面概略図である。
【図2】図1のE−E’断面図である。
【図3】磁場分布検知器の構造を示す図であり、(a)はA−A’断面図、(b)は側面図、(c)は図1の破線部Dの拡大図である。
【図4】NMR信号センサーの斜視概略図である。
【図5】(a)は金属薄膜部分の斜視図であり、(b)はNMR信号センサーの平面図(上面図)であり、(c)はNMR信号センサーの右側面図である。
【図6】本発明の一実施形態に係る磁場補正装置の概略図である。
【図7】NMR信号センサーの斜視概略図である。
【発明を実施するための形態】
【0044】
以下、本発明の一実施形態について説明する。なお、以下の説明における高さ方向は、図中における高さ方向であるものとする。また、図1は、図2のG−G’断面図に相当する。
【0045】
(NMR分光装置)
本実施形態に係るNMR分光装置10は、真空断熱容器11、及び超電導磁石6を備える。真空断熱容器11は、内壁11w、外壁11y、天井壁11u及び床壁11dを有する。内壁11w及び外壁11yは、それぞれ円筒状に形成されており、外壁11yの内径よりも内壁11wの外径が小さい。そして、内壁11w及び外壁11yは、同心に配置されている。
また、内壁11wの内部空間が、真空断熱容器11の外部と連通する円柱状のサンプル空間11sとなっており、内壁11wと外壁11yと天井壁11uと床壁11dとで囲まれた空間が、真空断熱容器11の外部から隔離され、真空にされた環状のコイル空間11tとなっている。
【0046】
コイル空間11tは低温空間であり、サンプル空間11sは室温空間である。真空断熱容器11の内壁11wによって、低温空間(コイル空間11t)と室温空間(サンプル空間11s)とが隔てられている。また、サンプル空間11sの中心には、サンプル80が配置される。サンプル80は、NMR分析用サンプル(分析対象サンプル)であり、具体的にはサンプル液を含むアンプルである。サンプル80の中心軸は、サンプル空間11sの中心軸に一致する(図1の一点鎖線参照)。
【0047】
超電導磁石(超電導電磁石)6は、静磁場(B0)を発生させるためのものであり、コイル空間11tに設けられた液体ヘリウム槽12内に収容されて、液体ヘリウムに浸漬されている。
液体ヘリウム槽12は、2つの熱輻射シールド13,14により2重に覆われている。液体ヘリウム槽12から気化したヘリウムガスは、首管15を通って外部に排出される。
ここで、静磁場B0の方向を、軸方向Cとする(図の矢印C方向参照)。軸方向Cは、サンプル空間11sの「高さ方向」に相当している。また、超電導磁石6には、磁場分布を粗調整するための超電導シムコイル(図示せず)が備えられている。
【0048】
(磁場補正装置)
磁場補正装置1は、サンプル空間11sにおける磁場分布を補正する装置であり、サンプル空間11sの磁場均一度(より詳細には、磁場補正コイル3の内部空間における磁場均一度)を高めるために用いられる。磁場補正装置1は、磁場分布検知器2、磁場補正コイル3、電流印加装置4、及び制御装置5を有する(図1及び図6参照)。以下、各部について説明する。
【0049】
(磁場分布検知器)
図3を用いて、磁場分布検知器2について説明する。磁場分布検知器2は、サンプル空間11sの磁場分布を検知するものであり、磁場分布検知器2には、複数のNMR信号センサー21と、支持部材(支持手段)27とが含まれる。
【0050】
支持部材27は、複数のNMR信号センサー21を円柱状空間内に設置するためのものであり、円筒状に形成されている。支持部材27は、FRP(Fiber Reinforced Plastic)製であり、磁場補正コイル3の内部(径方向に関して内側)に配置されている。そして、複数のNMR信号センサー21は、支持部材27に対して固定された状態になっている。また、複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0051】
ここで、「円柱状空間」は、磁場補正コイル3で囲まれた空間に相当する。また、円柱状空間の中心軸は、サンプル空間11sの中心軸に一致する(図1の一点鎖線参照)。さらに、円柱状空間の中心軸は、サンプル80の中心軸に一致する。また、サンプル80は、磁場分布検知器2で囲まれた空間に配置され、且つ、サンプル80のサンプル液は、軸方向Cに関して、磁場分布検知器2の中央付近に位置する(図1参照)。
【0052】
また、複数のNMR信号センサー21は、支持部材27の外面に埋められた状態になっている。そして、複数のNMR信号センサー21の表面位置は、支持部材27の表面位置に一致している。
なお、NMR信号センサー21は、支持部材27の表面から突出していてもよいし、また、支持部材27の内部(厚み方向に関して、露出しない位置)に配置されていてもよい。
【0053】
磁場分布検知器2は、96個のNMR信号センサー21を有する。具体的には、複数のNMR信号センサー21は、高さ方向に関して、8段になっており、(図3(b)参照)、且つ、それぞれの「段」には、12個のNMR信号センサー21が含まれる(図3(a)の断面図参照)。ここで、それぞれの「段」は、静磁場B0に対して垂直な面に対して平行であり、また、複数の「段」は、軸方向Cに沿って、層状に重ねて並べられている(「段」については、図3(b)の破線部参照)。
【0054】
また、磁場分布検知器2の各段においては、12個のNMR信号センサー21が、静磁場B0に垂直な円の円周上に、等間隔に配置されている(図3(a)参照)。そして、磁場分布検知器2の各段において、全てのNMR信号センサー21によって発生する磁場B1の方向は、静磁場B0の方向に概略直交する。また、磁場分布検知器2の各段において、全てのNMR信号センサー21によって発生する磁場B1の方向は、円柱状空間の中心軸を通る(図3(a)参照)。
なお、全てのNMR信号センサー21には、交流電流が流される。そのため、磁場B1の方向は、拡散方向(中心軸から外側へ向かう方向;図3(a)参照)と、その逆の求心方向(中心軸に向かう方向)とで、交互に変化する。
【0055】
(NMR信号センサー)
次に、図4及び図5を用いてNMR信号センサー21の詳細について説明する。なお、図5は、NMR信号センサー21の、RFコイルを含む金属薄膜部分のみを示した図である。
【0056】
複数のNMR信号センサー21は、サンプル空間11sに位置している。また、複数のNMR信号センサー21は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。すなわち、複数のNMR信号センサー21は、一箇所に集中せず、円柱状空間内に分散して配置されている。また、複数のNMR信号センサー21は、NMR信号を同時期に検知する。
【0057】
以下、それぞれのNMR信号センサー21について説明する。NMR信号センサー21は、箱状のベース部材22と、二つのRFコイル(第1RFコイル23及び第2RFコイル24)とを有する。
【0058】
ベース部材22は、ガラスから成る。また、ベース部材22の内部には、円柱状の収容空間22sが形成されており、この収容空間22sには、NMR信号を発する補正用サンプル81が収容されている。補正用サンプル81は液状サンプルであり、水素又は重水素を含む。
【0059】
二つのRFコイルは、薄膜形成技術(スパッタリングなど)を用いて、ベース部材22の表面に設けられている。二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交する(図4参照)。以下、その詳細について説明する。
【0060】
それぞれのNMR信号センサー21において、二つのRFコイルは、同じ方向に巻かれて形成されている。第1RFコイル23の両端からは、支持部23a及び支持部23bが延びており、第2RFコイル24の両端からは、支持部24a及び支持部24bが延びている。これらの支持部は、台形状の薄膜である。また、支持部23a及び支持部24aは、連結部25aによって連結されており、支持部23b及び支持部24bは、連結部25bによって連結されている。連結部25a及び連結部25bは、長方形の薄膜である。
【0061】
また、連結部25aには、導線26aが接続されており、連結部25bには、導線26bが接続されている。例えば、導線26aから連結部25aに電流が流されると、その電流は、支持部23a及び支持部24aに分岐して流れる。そして、一方では、電流が、支持部23a及び第1RFコイル23を通って、支持部23bから連結部25bへ流れ、他方では、電流が支持部24a及び第2RFコイル24を通って、支持部24bから連結部25bへ流れる。その後、電流は、連結部25bから、導線26bに流れる。このように、導線26aから連結部25aに電流が流された場合には、第1RFコイル23から第2RFコイル24へ向かって、磁場B1が発生する(図4参照)。
なお、導線26bから連結部25bに電流が流された場合には、これとは逆に、第2RFコイル24から第1RFコイル23へ向かって、磁場B1が発生する。いずれの場合においても、磁場B1は、NMR信号センサー21の正面(又は背面)に対して垂直な方向に生じる。
【0062】
NMR信号センサー21の二つのRFコイルにおいて、高周波磁場(回転磁場)が発生する。この高周波磁場の周波数は、補正用サンプル81に含まれる原子核のスピンが静磁場B0の中で持つラーモア周波数と同じである。これにより、補正用サンプル81に含まれる原子核に、いわゆる共鳴現象が起き、高周波磁場のエネルギーが吸収される。
【0063】
また、半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサー21は、小型センサーとして製造されている。
【0064】
(他のNMR信号センサー)
次に、図7を用いて他のNMR信号センサー31の詳細について説明する。なお、先に説明したNMR信号センサー21との違いについてのみ説明する。
【0065】
NMR信号センサー31は、図7に示すように、円柱状のベース部材32と、二つのRFコイル(第1RFコイル33及び第2RFコイル34)とを有する。また、NMR信号センサー31には、後述する共振回路56が電気的に接続されている。NMR信号センサー31の直径Dsは、0.3〜1mmである。
【0066】
ベース部材32は、両端が封止されたガラス管となっている。また、ベース部材32の内部には、補正用サンプル81が封入されている。二つのRFコイルは、薄膜形成技術(スパッタリングなど)を用いて、ベース部材32の表面に設けられている。
【0067】
(磁場補正コイル)
図6に戻って、次に、磁場補正コイル3について説明する。磁場補正コイル3は、サンプル空間11sにおける磁場分布を補正するためのコイルである。磁場補正コイル3は、アルミニウム製コイル及び銅製コイルを組み合わせて形成されている。また、磁場補正コイル3は、マトリックスシムとして構成されている。
【0068】
(電流印加装置)
電流印加装置(シム電源)4は、磁場補正コイル3に電流を印加するものであり、具体的には、直流電源装置である。電流印加装置4は、磁場補正コイル3に対して電気的に接続されている。
【0069】
(制御装置)
制御装置(印加電流制御手段)5には、制御ユニット51、RF送信ユニット52、RF受信ユニット53、送受信切替スイッチ54、切替スイッチ55、及び、複数の共振回路(第1共振回路56a、第2共振回路56b、第96共振回路56zなど)が含まれる。
【0070】
制御ユニット51は、電流印加装置4に対して電気的に接続されている。制御ユニット51は、磁場分布検知器2における検知結果に基づいて電流印加装置4を制御する。より具体的には、制御ユニット51は、検知結果に基づき、電流印加装置4を制御して、磁場補正コイル3に流れる電流の量を調整する。
【0071】
また、制御ユニット51には、CPU(CentralProcessing Unit)、及び、記憶装置(RAM(Random Access Memory)、ROM(Read Only Memory)、ハードディスクなど)が含まれる。
【0072】
送受信切替スイッチ54は、RFコイルの送受信動作を切り換えるためのものである。切替スイッチ55は、制御ユニット51に対して、送受信切替スイッチ54、及び、RF送信ユニット52(又はRF受信ユニット53)を介して、電気的に接続されている。そして、切替スイッチ55は、各共振回路と、制御ユニット51との接続状態を切り換えるために用いられる。
【0073】
制御装置5には、96個の共振回路が設けられており、これらの共振回路のそれぞれは、96個のNMR信号センサー21,31のそれぞれに対応して設けられている。なお、図においては、第3乃至第95共振回路を省略している。
【0074】
これらの共振回路には、直列共振回路(コンデンサとコイルとが直列に接続された回路)と並列共振回路(コンデンサとコイルとが並列に接続された回路)とが含まれており、同調およびRF送信ユニット52からの電力を反射なくRFコイルに伝達するためのマッチング回路を成している。これらの共振回路は、静磁場B0の作用下において、補正用サンプル81のNMR共鳴周波数(ラーモア周波数)付近で共振するように予め設定(粗調整)されている。
【0075】
これらの複数の共振回路は、切替スイッチ55及び送受信切替スイッチ54を介して、RF送信ユニット52及びRF受信ユニット53に接続されている。そして、あるNMR信号センサー21,31(n番目のセンサー)において、RF信号の送信及び受信が行なわれると、次に、その次のNMR信号センサー21,31(n+1番目のセンサー)において、RF信号の送信及び受信が行なわれる。このようにして、96個のNMR信号センサー21,31における送信及び受信は、連続的(シリアル)に行なわれる。
【0076】
それぞれのNMR信号センサー21,31を用いることにより、各センサー位置での共鳴周波数が取得される。そして、取得された共鳴周波数から、制御ユニット51において、各センサー位置での磁場が求められ、これにより、サンプル空間11sの磁場分布が得られる。また、制御ユニット51では、このようにして得られた磁場分布から、磁場を均一化するための、磁場補正コイル3に流す電流の値が算出される。そして、この算出された電流値を用いて、磁場補正コイル3により、サンプル空間11sの磁場補正が行なわれる。
【0077】
(磁場補正方法)
次に、磁場補正装置1を用いた磁場補正方法について説明する。まず、NMR分光装置(10)の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を、磁場分布検知器2を用いて検知する(検知工程)。具体的には、制御ユニット51が、96個のNMR信号センサー21,31の、それぞれの位置における共鳴周波数を取得し、その値から、各位置での磁場(磁束密度)を求める。また、本工程では、複数のNMR信号センサー21,31は、NMR信号を同時期に検知する。すなわち、各NMR信号センサー21,31における検知時間が100msecであり、96個のNMR信号センサー21,31における検知が、短時間(9600msec)で完了する。
【0078】
次に、検知工程における検知結果に基づいて、磁場補正コイル3に電流を印加し、サンプル空間11sにおける磁場分布を補正する(補正工程)。具体的には、制御ユニット51が、検知工程で得られたサンプル空間11sの磁場分布(空間分布)を用いて、磁場補正コイル3に対して印加する電流の値を計算する。そして、制御ユニット51が、電流印加装置4を制御して、計算された電流値に従って、磁場補正コイル3に電流を印加する。以上のようにして、磁場補正が行なわれ、サンプル空間11sの磁場分布が均一化される。
【0079】
(印加電流値の計算例)
ここで、補正工程における印加電流値の計算例について説明する。
まず、サンプル80の中心を原点とした場合に、原点の周囲の磁場分布BZ(r、θ、φ)は、次式のように表わされる。
【数1】
【0080】
この式2において、Pnm(cosθ)は、Legendre多項式を表わす。また、式2のように、磁場分布BZは、Legendre多項式の係数であるA0、Anm、及びBnm を用いて表わすことができる。ここで、A0、Anm、及びBnm をまとめてCiと記す。
【0081】
磁場補正コイル3が、軸方向に沿って並べられたj個のコイルから構成されているとする。この場合に、それぞれのコイルに、i番目の磁場成分として、単位電流に対して、Mijを発生するとした場合に、j個のコイルに流される電流値から成る配列Ijに対して、次の連立方程式が成立する。
【数2】
【0082】
この式3の連立方程式を解き、その解として電流値配列Ijを求める。そして、得られたIjのそれぞれの、逆符号の電流値(Ijのそれぞれの電流値に−1を乗じた後の値)が、印加される電流値の増減分になる。この計算された印加電流値に従って、電流を磁場補正コイル3に流せば、磁場補正が完了する。
【0083】
(効果)
次に、本実施形態に係る磁場補正装置1及び磁場補正方法により得られる効果について説明する。磁場補正装置1は、NMR分光装置10の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を検知する磁場分布検知器2と、サンプル空間11sにおける磁場分布を補正するための磁場補正コイル3と、磁場補正コイル3に電流を印加する電流印加装置4と、磁場分布検知器2における検知結果に基づいて電流印加装置4を制御する、制御装置(印加電流制御手段)5と、を備える。
磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21,31を有しており、当該複数のNMR信号センサー21,31は、静磁場B0の方向を軸方向(軸方向C)とする円柱状空間内に分布するように設置されている。
【0084】
この構成では、磁場分布検知器2の複数のNMR信号センサー21,31が、サンプル空間11sに設置されているので、磁場分布検知器2を出し入れする必要がない。そのため、磁場分布測定から磁場補正までを簡素化できる。
また、複数のNMR信号センサー21,31が、サンプル空間11sに分布するように設置されているため、磁場分布の測定に際し、センサー自体を移動させる必要がない。そのため、センサー自体を移動(スキャン)させる技術(例えば、特許文献1の技術)に比べて、迅速な磁場分布測定が可能となる。
さらに、本構成では、サンプル空間11sに分布した複数のNMR信号センサー21,31を用いて、サンプル空間11sの全体の磁場分布情報を迅速に取得できる。そのため、特許文献2の技術(Gradient Shimming)に比べて、迅速な磁場分布測定が可能となる。
【0085】
また、磁場補正装置1において、複数のNMR信号センサー21,31は、NMR信号を同時期に検知する。
この構成では、複数のNMR信号センサー21,31において、NMR信号が一度に検知されるので、迅速な磁場分布測定が可能となる。
【0086】
また、磁場補正装置1において、それぞれのNMR信号センサー21は、箱状のベース部材22と、当該ベース部材22の表面に設けられた二つのRFコイル(第1RFコイル23、及び第2RFコイル24)と、を有し、ベース部材22の内部には、NMR信号を発する補正用サンプル81が収容される収容空間22sが形成されており、二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0087】
また、磁場補正装置1において、それぞれのNMR信号センサー31は、円筒状のベース部材32と、当該ベース部材32の表面に設けられた二つのRFコイル(第1RFコイル33、及び第2RFコイル34)と、を有し、ベース部材32の内部には、NMR信号を発する補正用サンプル81が収容されており、二つのRFコイルによって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0088】
半導体製造技術(具体的には、スパッタリング、エッチング、CVD、PVD、フォトリソグラフィなどの薄膜形成技術)を用いることにより、本構成に係るNMR信号センサー21,31を、小型センサーとして作成できる。そして、小型のNMR信号センサー21,31を用いることにより、磁場分布検知器2において、隣接センサー間での磁場の干渉を小さくすることができ、また、プローブ(分析対象サンプルからの信号を取得するためのもの)に与える磁場の影響を低減できる。
【0089】
また、磁場補正装置1においては、ベース部材22,32が、ガラスから成っている。
本構成では、ベース部材22,32がガラスであるため、サンプル空間11sの磁場が、NMR信号センサー21,31により乱される量が少ない。
【0090】
また、磁場補正装置1において、二つのRFコイルは、薄膜形成技術を用いて形成されたものである。
この構成では、それぞれのRFコイルが薄膜として形成されるため、サンプル空間11sの磁場が、RFコイルにより乱される量が少ない。
【0091】
また、磁場補正装置1では、磁場分布検知器2において、複数のNMR信号センサー21が、静磁場B0の方向に沿って、8段になっている。
【0092】
本構成により、サンプル空間11sの高さ方向に関する正確な磁場分布の測定が可能となる。そして、その測定結果を用いて、高さ方向に関する、サンプル空間11sの磁場均一度を高められる。
【0093】
また、磁場補正装置1では、磁場分布検知器2の各段においては、12個のNMR信号センサーが、静磁場B0に垂直な円の円周上に、等間隔に配置され、磁場分布検知器2の各段における、全てのNMR信号センサー21,31によって発生する磁場B1の方向は、静磁場B0の方向に概略直交している。
【0094】
この構成により、静磁場B0に垂直な面において、多くの位置で磁場測定が可能となっている。そのため、各段において、サンプル空間11sのより正確な磁場分布が得られる。
【0095】
また、磁場補正装置1において、磁場分布検知器2の各段における、全てのNMR信号センサー21,31によって発生する磁場B1の方向は、円柱状空間の中心軸を通る。
【0096】
この構成により、複数のNMR信号センサー21,31によって発生する磁場B1の方向が放射線状になるため、各段においては、面の全体にわたって磁場分布が得られる。そのため、各段において、さらに正確な磁場分布が得られる。
【0097】
また、本実施形態に係る磁場補正方法は、NMR分光装置10の内部における、静磁場B0が作用するサンプル空間11sの磁場分布を、磁場分布検知器2を用いて検知する検知工程と、検知工程における検知結果に基づいて、磁場補正コイル3に電流を印加して、サンプル空間11sにおける磁場分布を補正する補正工程と、を備える。
磁場分布検知器2は、サンプル空間11sに位置する複数のNMR信号センサー21,31を有しており、当該複数のNMR信号センサー21,31は、静磁場B0の方向を軸方向とする円柱状空間内に分布するように設置されている。
【0098】
この方法により、磁場分布検知器2の出し入れが不要となり、且つ、迅速な磁場分布測定が可能となる。
【0099】
(その他の効果)
また、磁場分布検知器2においては、NMR信号センサー21,31が8段になっており、各段に12個のNMR信号センサー21,31が配置されている。そして、96個のNMR信号センサー21,31が、円筒状に配置されており、且つ、サンプル80のサンプル液が、軸方向Cに関して、磁場分布検知器2の中央付近に位置する。そのため、本構成により、高い精度での磁場分布測定が可能となっている。
【0100】
また、NMR信号センサー21,31が、薄膜形成技術を用いて形成されているため、NMR信号センサー21,31の全体の厚さを、1mm未満にすることができる。そのため、例えば、支持部材27の厚さを約1mmにして、NMR信号センサー21,31を支持部材27の厚み方向で完全に埋設した形に設置できる。
【0101】
また、上記の特許文献1の技術では、磁場補正を行うべき対象空間内に、磁場測定装置を新たに挿入するため、磁場測定装置の磁化そのものが測定対象空間の磁場に誤差を生じせしめる可能性がある。一方、磁場補正装置1では、磁場補正対象空間内に、新たに磁場測定装置を挿入することがないため、その心配がない。
【0102】
また、上記の特許文献2の技術では、サンプル空間の磁場分布画像を得るためには、磁場勾配の反転走査が必要となり、この結果、渦電流によって一時的に磁場が不均一な状態となる可能性がある。一方、磁場補正装置1では、磁場勾配の反転走査が不要であり、磁場が不均一になる問題が生じ難い。
【0103】
(他の実施形態について)
本発明の実施の形態は、上記の実施形態には限られない。例えば、複数のNMR信号センサーが、各段に一つのみ配置され、且つ、複数の信号センサー全体としては、静磁場B0を軸方向として、螺旋状に配置されていてもよい。
【0104】
また、上記の実施形態においては、磁場分布検知器2が、磁場補正コイル3の内面に接触している。しかし、磁場分布検知器と、磁場補正コイルとは、接触していなくてもよい。
【産業上の利用可能性】
【0105】
本発明は、NMR分光装置の磁場分布補正に適用できる。
【符号の説明】
【0106】
1 磁場補正装置
2 磁場分布検知器
21,31 NMR信号センサー
22,32 ベース部材
22s 収容空間
23,33 RFコイル
24,34 RFコイル
25a、25b 連結部
26a、26b 導線
27 支持部材
3 磁場補正コイル
4 電流印加装置
5 制御装置(印加電流制御手段)
51 制御ユニット
52 RF送信ユニット
53 RF受信ユニット
54 送受信切替スイッチ
55 切替スイッチ
56、56a、56b、56z 共振回路
6 超電導磁石
10 NMR分光装置
11 真空断熱容器
11s サンプル空間
11t コイル空間
11w 内壁
11y 外壁
80 サンプル
81 補正用サンプル
【特許請求の範囲】
【請求項1】
NMR分光装置(10)の内部における、静磁場が作用するサンプル空間(11s)の磁場分布を検知する磁場分布検知器(2)と、
前記サンプル空間における磁場分布を補正するための磁場補正コイル(3)と、
前記磁場補正コイルに電流を印加する電流印加装置(4)と、
前記磁場分布検知器における検知結果に基づいて前記電流印加装置を制御する、印加電流制御手段(5)と、を備え、
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサー(21,31)を有しており、
当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されていることを特徴とする磁場補正装置(1)。
【請求項2】
前記複数のNMR信号センサーは、NMR信号を同時期に検知することを特徴とする、請求項1に記載の磁場補正装置。
【請求項3】
それぞれの前記NMR信号センサーは、箱状のベース部材(22)と、当該ベース部材の表面に設けられた二つのRFコイル(23、24)と、を有し、
前記ベース部材の内部には、NMR信号を発する補正用サンプル(81)が収容される収容空間(22s)が形成されており、
前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項1又は2に記載の磁場補正装置。
【請求項4】
それぞれの前記NMR信号センサーは、円筒状のベース部材(32)と、当該ベース部材の表面に設けられた二つのRFコイル(33、34)と、を有し、
前記ベース部材の内部には、NMR信号を発する補正用サンプル(81)が収容されており、
前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項1又は2に記載の磁場補正装置。
【請求項5】
前記ベース部材が、ガラスから成ることを特徴とする、請求項3又は4に記載の磁場補正装置。
【請求項6】
前記二つのRFコイルは、薄膜形成技術を用いて形成されたものであることを特徴とする、請求項3乃至5のいずれか一項に記載の磁場補正装置。
【請求項7】
前記磁場分布検知器において、前記複数のNMR信号センサーは、前記静磁場の方向に沿って、少なくとも7段になっていることを特徴とする、請求項1乃至6のいずれか一項に記載の磁場補正装置。
【請求項8】
前記磁場分布検知器の各段においては、少なくとも8つの前記NMR信号センサーが、前記静磁場に垂直な円の円周上に、等間隔に配置され、
前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項7に記載の磁場補正装置。
【請求項9】
前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記円柱状空間の中心軸を通ることを特徴とする、請求項8に記載の磁場補正装置。
【請求項10】
NMR分光装置(10)の内部における、静磁場が作用するサンプル空間(11s)の磁場分布を、磁場分布検知器(2)を用いて検知する検知工程と、
前記検知工程における検知結果に基づいて、磁場補正コイル(3)に電流を印加して、前記サンプル空間における磁場分布を補正する補正工程と、を備え、
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサー(21,31)を有しており、
当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されていることを特徴とする磁場補正方法。
【請求項1】
NMR分光装置(10)の内部における、静磁場が作用するサンプル空間(11s)の磁場分布を検知する磁場分布検知器(2)と、
前記サンプル空間における磁場分布を補正するための磁場補正コイル(3)と、
前記磁場補正コイルに電流を印加する電流印加装置(4)と、
前記磁場分布検知器における検知結果に基づいて前記電流印加装置を制御する、印加電流制御手段(5)と、を備え、
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサー(21,31)を有しており、
当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されていることを特徴とする磁場補正装置(1)。
【請求項2】
前記複数のNMR信号センサーは、NMR信号を同時期に検知することを特徴とする、請求項1に記載の磁場補正装置。
【請求項3】
それぞれの前記NMR信号センサーは、箱状のベース部材(22)と、当該ベース部材の表面に設けられた二つのRFコイル(23、24)と、を有し、
前記ベース部材の内部には、NMR信号を発する補正用サンプル(81)が収容される収容空間(22s)が形成されており、
前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項1又は2に記載の磁場補正装置。
【請求項4】
それぞれの前記NMR信号センサーは、円筒状のベース部材(32)と、当該ベース部材の表面に設けられた二つのRFコイル(33、34)と、を有し、
前記ベース部材の内部には、NMR信号を発する補正用サンプル(81)が収容されており、
前記二つのRFコイルによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項1又は2に記載の磁場補正装置。
【請求項5】
前記ベース部材が、ガラスから成ることを特徴とする、請求項3又は4に記載の磁場補正装置。
【請求項6】
前記二つのRFコイルは、薄膜形成技術を用いて形成されたものであることを特徴とする、請求項3乃至5のいずれか一項に記載の磁場補正装置。
【請求項7】
前記磁場分布検知器において、前記複数のNMR信号センサーは、前記静磁場の方向に沿って、少なくとも7段になっていることを特徴とする、請求項1乃至6のいずれか一項に記載の磁場補正装置。
【請求項8】
前記磁場分布検知器の各段においては、少なくとも8つの前記NMR信号センサーが、前記静磁場に垂直な円の円周上に、等間隔に配置され、
前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記静磁場の方向に概略直交することを特徴とする、請求項7に記載の磁場補正装置。
【請求項9】
前記磁場分布検知器の各段における、全ての前記NMR信号センサーによって発生する磁場の方向は、前記円柱状空間の中心軸を通ることを特徴とする、請求項8に記載の磁場補正装置。
【請求項10】
NMR分光装置(10)の内部における、静磁場が作用するサンプル空間(11s)の磁場分布を、磁場分布検知器(2)を用いて検知する検知工程と、
前記検知工程における検知結果に基づいて、磁場補正コイル(3)に電流を印加して、前記サンプル空間における磁場分布を補正する補正工程と、を備え、
前記磁場分布検知器は、前記サンプル空間に位置する複数のNMR信号センサー(21,31)を有しており、
当該複数のNMR信号センサーは、前記静磁場の方向を軸方向とする円柱状空間内に分布するように設置されていることを特徴とする磁場補正方法。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−63247(P2012−63247A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−207656(P2010−207656)
【出願日】平成22年9月16日(2010.9.16)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月16日(2010.9.16)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
[ Back to top ]