
磁性システムを特徴付けるための装置および方法
【課題】理論的シミュレーションモデルを最適化することにより測定されたデータに適合させる。
【解決手段】磁界の測定データと理論的なモデリングデータまたはシミュレーションデータとを組み合わせることによって、磁性システムの定量的な特性を取得するデータ処理方法であって、測定データに対する最良適合を取得するために、理論的なモデルの入力パラメータが最適化方法を用いて最適化される方法において、処理を大幅に高速化させるために、実行を最適化する前に磁界分布を予め計算する。この改善されたデータ処理と、例えば磁界カメラを用いた高速磁界マッピングとを組み合わせることによって、磁性システムのリアルタイムにおける測定およびデータ分析を、例えば品質管理において適用させることが可能になる。
【解決手段】磁界の測定データと理論的なモデリングデータまたはシミュレーションデータとを組み合わせることによって、磁性システムの定量的な特性を取得するデータ処理方法であって、測定データに対する最良適合を取得するために、理論的なモデルの入力パラメータが最適化方法を用いて最適化される方法において、処理を大幅に高速化させるために、実行を最適化する前に磁界分布を予め計算する。この改善されたデータ処理と、例えば磁界カメラを用いた高速磁界マッピングとを組み合わせることによって、磁性システムのリアルタイムにおける測定およびデータ分析を、例えば品質管理において適用させることが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁石、磁性アセンブリ、磁性体(これらのすべては「磁性システム」と呼ばれている)およびこのような磁性システムを含む製品の、磁気測定、磁気検査、研究、開発および品質管理の分野に位置づけられる。より具体的には、本発明は、磁性システムの磁界の2次元マッピングから情報を抽出するための方法に関する。この磁性マッピングは、1つの実施形態において「磁界カメラ」システムから取得され得る。当該磁界カメラシステムは、高解像度の2次元磁界マップを高速に記録でき、これにより、例えば磁性システムの迅速な品質管理において、このプロセスを適用することが可能になる。磁界マップからの情報の抽出は、測定データを磁性モデルに基づいて磁性システムから得たシミュレーションデータまたは計算データと比較することにより行われる。磁性モデルの入力パラメータは、測定データに最良に適合するように変更され、最適化される。そして、結果として生じた最適化された入力パラメータにより、所要の追加情報が与えられる。
【背景技術】
【0002】
既存の磁気測定技術は、磁石または磁性システムの特定のパラメータの1つを主に測定する。例えば、ガウスメータは、空間における1つの位置での磁界を測定する。例えば、ヘルムホルツコイルは、磁石の統合された磁気モーメントを測定する。近年、新たな磁気測定の方法および装置が発明された。当該方法および装置は、「磁界カメラ」と呼ばれており、高解像度の2次元磁界マップを高速に記録できる。このシステムは磁界センサの集積化2Dアレイを有している半導体チップから成り、磁界センサのそれぞれは局所的な磁界を個別に測定する。アレイにおけるセンサは、十分に制御されている標準的なチップ製造プロセスに起因して、極めて正確に定義された相対距離を空けて接近させて配置されている。個別に磁界を測定する多数のピクセルは、結果として生じた磁界マップ内に含まれている膨大な情報をもたらす。当該情報は、簡単に明らかになるものではなく、先進的なデータ分析(例えば、本発明に記載の方法)を用いてのみ抽出され得る。
【0003】
一方、磁界シミュレーションは、磁石および磁性システムの研究、開発、および設計のために広く用いられている。多くの磁界シミュレーションソフトウェアのプログラムが市販されている。その大半は、有限要素モデリング(FEM)アルゴリズムを用いており、磁石および磁性システムの他に、非磁性体の、複雑な形状および組合せのシミュレーションを可能にする。FEMに基づいたこれらのアルゴリズムの他に、分析表現はまた、非常に対照的かつ単純な、磁石の幾何学的形状の多く(例えば、ブロック、球形、回転楕円体および楕円体)のために存在している。分析モデルは、FEMモデルよりも迅速に計算し得るが、シミュレートできる磁性システムの種類において制限されている。例えば、分析モデルは、一様に磁化している磁石のみシミュレートし得る。また、分析モデルは、1でない相対透磁性を含んでいるシステムをシミュレートし得ない。
【0004】
分析モデルは、例えば一様に磁化された球体、ブロック磁石(R. Engel-Herbert and T. Hesjedal, ‘Calculation of the magnetic stray field of a uniaxial magnetic domain’, JOURNAL OF APPLIED PHYSICS 97, 074504, 2005を参照)、および回転楕円体(M. Tejedor, H. Rubio, L. Elbaile, and R. Iglesias, ‘External Fields Created by Uniformly Magnetized Ellipsoids and Spheroids’, IEEE TRANSACTIONS ON MAGNETICS. VOL. 31, NO. I., JANUARY 1995を参照)のために存在する。他の形状(例えば、円柱、円、円弧等)は、複数のこれら基本的な形状を組み上げることによって構築され得る。例えば、何れの形状も、ブロック磁石の実質的に大きな集合により近似され得る。ブロック磁石の集合の磁界は相加的であるので、磁界分布全体を取得するために、全てのブロック磁石の磁界分布がすべて単純に加算され得る。
【発明の概要】
【課題を解決するための手段】
【0005】
本発明の態様は、添付の特許請求の範囲において規定されている。本発明の実施形態に関する特定の非限定的な記載が、以下に為されている。
【0006】
本発明の一態様において、理論的シミュレーションモデルをモデルパラメータの組を最適化することにより測定されたデータの組に適合させるための方法が提供される。当該方法は、実際の最適化手順が開始される前に、モデリング計算作業の全部または一部が実施されること(「事前計算」または「予め計算されたデータ」)を特徴としている。測定されたデータは、例えば磁界の値であり得る。好ましい実施形態において、測定されたデータは、磁界カメラ装置から取得された磁界の値である。
【0007】
計算速度の利点をもたらすために、理論的シミュレーションモデルは分析モデルであり得る。
【0008】
また、理論的シミュレーションモデルは、有限要素法(FEM)モデルであり得る。
【0009】
最適化スキームは、線形データ適合アルゴリズムまたは非線形データ適合アルゴリズムを用い得る。
【0010】
モデルパラメータは、磁化ベクトル成分、位置座標、大きさの幾つかまたはすべてを含み得る。
【0011】
1つの実施形態において、事前計算は、磁界分布の組を計算することを含んでいる。
【0012】
最適化手順には、予め計算されたデータセットの線形結合の作成、および、予め計算されたデータセットにおける補間アルゴリズムのような種々の選択肢が可能である。
【0013】
上記最適化スキームにより、最良適合のシミュレーション済データセット、および、最良適合のデータセットと測定されたデータセットとの差である残差データセットが生じ得る。
【0014】
本発明は、永久磁石の検査および/または品質管理、単軸磁化を有する永久磁石の検査および/または品質管理、多極磁化を有する永久磁石の検査および品質管理、強磁性体、常磁性体、反磁性体、磁歪体および/または超電導体および/または磁気応答の他の形態を有する材料の検査および/または品質管理、電磁石の検査および/または品質管理、磁性アセンブリの検査および/または品質管理、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接、アーク溶接等を含んだ溶接の検査および/または品質管理に有利に適用されてもよい。
【0015】
本発明の1つの態様において、測定された磁性システムの特性の情報を抽出するために、測定された磁界マップと測定された磁性システムの理論的シミュレーションとを組み合わせる迅速な方法が提供される。当該方法は、測定のみまたはシミュレーションのみによって取得され得ない。物理的磁性システムは、シミュレーションモデルによって、シミュレートされるか、または、少なくとも近似されると仮定される。ここで、後者には、FEMモデル、分析モデル、または、他の種類のモデルも用いられ得る。
【0016】
シミュレーションモデルには、測定された磁界分布と比較され得る磁界分布を、計算またはシミュレーションするための入力パラメータの組が必要であると仮定される。一般に、これらの入力パラメータは、例えば、形状、大きさ、位置、磁化ベクトルまたは構造等の磁性システムの物理的特性であるが、これに限定されはしない。最適化手順が適用されるとき、入力パラメータは、通常、最適化手順が開始される初期値を有している。最適化手順の目的は、計算またはシミュレーションされた磁界分布と測定された磁界分布との全体的な差を最小化することである。これは、最適化スキームに従ってモデル入力パラメータを変更することによって実行され、測定された磁界分布とシミュレーションされた磁界分布との全体的な差における極小値または大域的最小値を(もし存在する場合は)求めることが可能になる。この全体的な差は、各データポイントでの差の二乗の和として、または、別のパラメータとして表され得る。最適化スキームは線形または非線形であり得る。非線形の最適化スキームの例は、例えば、マトラボ(Matlab)における「lsqnonlin」関数に用いられる「信用領域Reflective(trust-region-reflective)」アルゴリズムおよび「レーベンバーグ・マルカート(Levenberg-Marquardt)」アルゴリズムである。最適化が完了した後のモデル入力パラメータの最終値は、磁性システムの実際の物理的パラメータの近似値であり、それ故、測定結果とみなされ得る。
【0017】
本発明は、計算またはシミュレーションされたデータを測定データに適合させる上述の一般的な方法を大幅に高速化させる方法に関する。それによって、当該方法は、個々の磁性システムの構成について一度の計算しか必要としない予め計算されたシミュレーションデータを利用している。最適化手順の間、予め計算されたデータは、測定データへの最良適合を取得するために、線形結合スキームおよび補間スキームのような高速アルゴリズムを用いて処理されるが、これに限定されはしない。それ故、上記モデルの入力パラメータは、最適化手順の各繰り返しにおいて、システム全体の再シミュレーションを必要とせずに最適化される。
【0018】
上述のような最適化スキームが完了し、理論的モデルに対する全ての所望のパラメータが既知数になったとき、以下のデータ、すなわち、測定された磁界分布、シミュレーションされた最良適合の磁界分布、残差磁界分布、すなわち、測定された磁界分布と最良適合の理論的な磁界分布との差、モデルの最適化されたパラメータが処理される。これらのデータは、最適化分析を行わないときよりも簡単に算出されつつ分析され得る、測定された物理的システムについての膨大な情報を含んでいる。
【図面の簡単な説明】
【0019】
【図1】ホール磁界センサを有している磁界カメラ測定装置に設置されている、軸方向に磁化されている円筒形状の磁石を示す図である。
【図2】図1に示されている磁石の測定された磁界分布を示す図である。測定された磁界成分はBz成分であり、磁界カメラセンサに対して直交している。
【図3】図1および図2の磁石に対する、本発明に係る最適化手順の結果を示す図である。
【図4】図1および図2における磁石の理論的な最良適合の磁界分布を示す図である。
【図5】上図における分析から生じる残差磁界分布(適合データ−測定データ)を示す図である。
【図6】a=b=5mmおよびc=2mmを有するブロック磁石の測定された磁界分布を示す図である。測定された磁界成分はBz成分であり、磁界カメラセンサに対して直交している。
【図7】図6の磁石に対する、本発明に係る最適化手順の結果を示す図である。
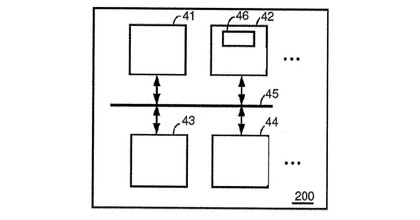
【図8】本発明と共に用いられる概略的な処理エンジン装置またはコンピュータシステムを示す図である。
【発明を実施するための形態】
【0020】
本発明の1つの実施形態において、最適化手順は、次の方法において実行される。特定の幾何学的形状を有する、均一に磁化された磁石を想定する。例えばデカルト座標系のX、Y、およびZ方向のそれぞれに沿って3つの側面a、bおよびcを有するブロック磁石である。上記磁石は、座標系の原点にその中心が設置されている。磁界カメラ装置(すなわち、磁界センサの2次元アレイを備えている磁界センサ)は、磁石より下に距離d(dはZ方向)を隔てたXY平面における磁石の磁界分布を記録するために、磁石の下に設置されている。磁界カメラは、XY平面におけるのA=L*Wの感知領域を有し、(本実施形態では)磁界のZ成分、すなわちBz(x,y,z)のみを記録する。ここで、zは、磁界カメラの2次元性に起因して固定される。座標系のX軸およびY軸は、磁界カメラにおけるセンサアレイの行および列に対して平行であると仮定する。その目的は、数あるパラメータ(以下参照)の中でも、それぞれ3つの座標軸に沿った成分Mx、MyおよびMzを有している、物理的ブロック磁石の磁化ベクトルMを求めることである。Mを除いた、上記モデルの他の入力パラメータが(略)明らかであるとき、以下の手順が適合され得る。磁化M=(Mx,My,Mz)を有している磁石の磁界分布は、次式のように3つの磁界分布の線形結合として表され得ると仮定され、3つの磁界分布のそれぞれは、Mの1つの成分に対応している磁化を有する磁石により生成される。
【0021】
【数1】

【0022】
ただし、Bz(x,y,z)(Mx,My,Mz)は、磁化ベクトルM=(Mx,My,Mz)を有する磁石により生成された、位置(x,y,z)での磁界ベクトルのz成分である。式(1)において、BとMとの間の線形的な関係が仮定される。すなわち、B(M)=M*B(1)と仮定される。ここで、B(M)は、磁化Mを有する磁石により生成された磁界である。
【0023】
Mx、MyおよびMzが最適化手順における未知数のパラメータである一方、Bz(x,y,z)(1,0,0)、Bz(x,y,z)(0,1,0)およびBz(x,y,z)(0,0,1)の値(分布)は、予め、すなわち最適化手順が開始される前に計算され得る。特にFEMモデルが用いられるとき、および/または、広域がカバーされるときおよび空間分解能が大きいとき、これらの値は、事実上、計算に長時間を要し得る磁界分布全体を示す。さらに、これらの磁界分布は、磁石の幾何学的な形状または磁性システムの構造のそれぞれに対して一度しか計算される必要がない。そして、最適化は、線形結合(1)が測定された磁界分布に対して最適化されるMx、MyおよびMzの最適値を求めることのみを含む。この手順は、事前の計算が一度だけ必要である多くの同様の磁石の、例えば、高速インライン検査を可能にする。
【0024】
本発明の別の実施形態において、他のパラメータもまた未知数であるとき、上記の高速な最適化スキームは次の方法において適合され得る。以下のパラメータが前述の実施形態と同一の設定に対して未知数であると仮定する。Mは次式のように表される。
【0025】
【数2】
【0026】
ここで、
M=(Mx,My,Mz)は、測定された磁石の磁化ベクトルであり、
aおよびbは、測定された磁石の側面のサイズであり、
X_positionおよびY_positionは、測定された磁石の中心のXY平面における正確な位置であり、
Alpha_positionは、XY平面における測定された磁石の角度位置、すなわちa軸およびb軸が、(カメラアレイにおけるセンサ軸に対して平行である、)座標系のX軸およびY軸を用いて成す角度である。
【0027】
上記のパラメータが未知数であるとき、磁界の再計算または再シミュレーションをせずに、予め計算された磁界分布が、高速な最適化を実行するために依然として用いられ得る。これは、異なるパラメータの(サブセットの)連続最適化および/または同時最適化を用いて遂行され得る。ここで、各パラメータに対する最適化を別々に行う一般的な方法を記載する。実際には、より良い結果を取得するために、より多くのパラメータが同時に最適化される。
【0028】
第1の近似がM=(Mx,My,Mz)に対して既に求められていると仮定する。一般に、物理的な磁石は、座標系の正確な原点には配置されずに、XY平面における未知数の位置(X_position, Y_position)にその中心を有している。計算された磁界マップBz(x,y,z)(1,0,0)、Bz(x,y,z)(0,1,0)およびBz(x,y,z)(0,0,1)が、磁界カメラのセンサ領域よりも広域の部分において計算されると仮定する。既に求められている近似されたMx値、My値およびMx値を用いることにより、座標系の原点における磁石に対する磁界マップは、略既知数となる。しかしながら、測定された磁界マップは、測定されたマップに対する、XY平面におけるオフセットの位置を有する。上記手順は、現在、計算されたマップをベクトル(X_shift, Y_shift)にシフトさせること、および、測定されたマップと計算されたマップとの重複(オーバーラップ)が最適になるX_shift値およびY_shift値を求めることにより構成される。実際には、これは次の方法において行われる。計算されたマップの測定されたマップへの一般的なシフト(X_shift, Y_shift)に対して、双方のマップのデータポイントの位置は一致しない。
【0029】
従って、測定されたマップにおけるデータポイントに対応するポイントでの理論的な磁界値を計算するように、理論的なマップが補間される。これは、理論的なマップおよび測定されたマップを直接差し引くこと、ならびに平方和を計算することを可能にする。ここでの1つの要点は、補間することが、磁界をシミュレーションするよりも大幅に高速のプロセスであることである。従って、この補間プロセスは、最適値が求められるまで複数のシフト(X_shift, Y_shift)に対して連続して実行される。(X_shift, Y_shift)=(X_position, Y_position)の最適値が、磁石の物理的な位置をより明確に示す。
【0030】
実際には、(X_shift, Y_shift)は、Mx、MyおよびMzと同時に最適化され得る。本発明の別の実施形態では、次の方法において、前述の処理をより直接的にAlpha_positionにまで拡張する。一般に、物理的な磁石は、X軸およびY軸と正確に一直線を成すa軸およびb軸を有さないが、XY平面における角度Alpha_position回転される。一度(X_position, Y_position)が既知数となれば、計算されたマップは、最適化された測定されたマップとの重複を求めるために、ポイント(X_position, Y_position)の周りに角度Alpha回転され得る。この場合、前述の実施形態における補間スキームと同様の補間スキームが適合され得る。
【0031】
最適値が求められるとき、最適化されたAlpha値が、Alpha_position、すなわちXY平面における磁石の回転角度に対応する。実際には、Alpha_positionは、Mx、MyおよびMzと同時に最適化され、最適な結果を取得するために、場合によって再度(X_position,Y_position)を伴って最適化される。前述の繰り返し(Alpha無しでの)からの初期パラメータが既に良い近似であるので、これらの変数を再度最適化に取り入れることにより、アルゴリズムに膨大な計算時間が追加されはしない。
【0032】
本発明の別の実施形態において、さらに一歩進めると、一度Mx、My、Mz、X_position、Y_positionおよびAlpha_positionに対する最適値が求められると、磁石の側面の大きさ(この場合、aおよびb)は、最良適合のために最適化され得る。しかしながら、実際に、磁界分布は、変更された磁石の大きさに対して再計算される必要があるので、この手順では、正確な結果は生じずに近似となる。しかしながら、初期値からの小さなズレに対し、この方法は、十分正確に機能しつつ、磁界分布全体を再計算するよりも大幅に速い。磁石の大きさを最適化する方法は、以下に説明されている。測定されたマップとより一致させるために、パラメータaおよびbは、最適化され、かつ既知数である、前述の他のパラメータを伴い、計算された磁界マップを「伸縮」または「圧縮」することにより最適化され得る。これは、計算格子に(XおよびYの両方向における)スケーリング因子を適合させることにより実行される。実際に最適化されているのは、これらのスケーリング因子である。初期のa値およびb値(または他の大きさの値)を最適化されたスケーリング因子により除算することにより、最適化された大きさがもたらされる。
【0033】
別の実施形態では、最適化手順に含めるパラメータ、および、初期値にて一定に維持しておくパラメータを選択し得る。
【0034】
上記の実施形態において記述されている最適化スキームが完了し、理論的モデルに対する全ての所望のパラメータが既知数になるとき、以下のデータ、すなわち、測定された磁界分布、シミュレーションされた最良適合の磁界分布、残差磁界分布(すなわち、測定された磁界分布と最良適合の理論的な分布との差)、モデルの最適化パラメータが処理される。これらのデータは、測定された物理的システムについての大量の情報を含んでいる。結果として生じたこれらのデータが特定の適用のために用いられている、本発明に係る多くの実施形態が、以下に記述されている。
【0035】
1つの実施形態において、物理的システムの測定された特性として、最適化パラメータが用いられ得る。例えば、最適化磁化ベクトルM=(Mx,My,Mz)は、次式で表されるそのサイズについての情報を与える。
【0036】
【数3】
【0037】
それは、幾何学的な磁化軸からのズレについての情報も与える。磁石は、そのc軸(Z方向における)に沿って磁化されると仮定する。上述の最適化手順により、Mzが最大であるが、MxおよびMyに対しては0でない値を伴うM=(Mx,My,Mz)が生じる。(Mx,My,Mz)をデカルト座標から球座標(M,theta,phi)に変換することによって、c軸からの偏角(theta)および平面XYにおけるその投影角(phi)と同様に、Mの大きさを簡単に取得する。特に、Mおよびthetaに対しての値は、単軸磁化された永久磁石の品質を決定する重要な特性であり、本発明を用いることによって、検査の間、簡単に取得および評価され得る。本発明の別の実施形態において、XY平面における磁石の最適化された位置(角度位置を含む)は、例えば対象物の位置を正確に測定するため、またはフィードバックシステムとして最適化スキームを用いて対象物をアクティブに位置づけるために用いられ得る。
【0038】
別の実施形態において、残像は、物理的な磁石またはその磁化構造における不完全性を検出するために分析され得る。例えば、最初に測定された磁界マップにおいて明確でない、磁界分布における不均質性は、残差マップにおいて認識できるようになり得る。これらは、磁石における内部亀裂または不純物、磁気特性が異なっている領域、磁化における欠陥等を示し得る。この残像において、統計的な画像分析は、例えば適合/不適合(pass/fail)の品質管理のために用いられ得る定量的なパラメータを生じさせることによって実行され得る。
【0039】
別の実施形態において、「良質の」磁石とみなされている基準磁石は、本発明の最適化スキームを用いて分析され得る。その後、結果として生じた理論的なマップは、品質を決定する必要のある他の同様の磁石との比較のために用いられ得る。「良質であるが完全ではない」磁石(完全な磁石はない)と直接比較するかわりに、上記磁石は、最良適合の理論的等価物を求めることによって完全な磁石になる。この理論的等価物において、基準磁石をよりいっそう完全なものにするために、不完全性が除去され得る。例えば、上記磁石は、c方向(z方向)に沿った磁化を有すると仮定されるが、最適化分析では、少量のMx成分およびMy成分が示される。最適化された変数の他の全てを一定に保ちつつ、MxおよびMyを0に設定し、磁界分布を再計算することにより、これらの成分は、最適化分析の後に除去され得る。別の実施形態において、前述した全ての内容は、ブロック磁石を除いた、円筒形状の磁石、円形状の磁石、円弧形状の磁石、より複雑な形状の磁石等を含む全ての磁石の形状に適合するが、これに限定されるものではない。
【0040】
別の実施形態において、上述のすべては、複数の磁石の組合せ、磁性アセンブリおよび磁性システム、磁性システムを含む生成物等に適用される。
【0041】
別の実施形態において、上述のすべては、磁界カメラ装置MagCamを用いて測定された磁界分布に適用される。磁界カメラMagCamは、例えば感知領域を測定することにより、移動することなく磁界マップを記録できる。または、それは広域をカバーするために機械的に走査され得る。
【0042】
別の実施形態において、上述のすべては、磁界分布を取得するために磁性システム全体に亘り機械的に走査される離散的な磁界センサを用いて測定された磁界分布に適用される。上記離散磁界センサは、以下のタイプ、すなわち、ホール効果センサ、磁気抵抗センサ(AMR、GMR、TMR)、SQUIDセンサ、フラックスゲートセンサ、NMRセンサ等の1つまたはこれらの組合せであり得るが、これに限定されることはない。
【0043】
別の実施形態において、測定された磁界マップは、画像をまとめるアルゴリズムを用いて複数の磁界分布マップをまとめることによって取得される。
【0044】
別の実施形態において、上記は外部磁界を用いて磁化される軟磁性材料に適用される。
【0045】
別の実施形態において、鋼鉄、ニッケル、コバルトのような磁性材料における溶接に適用されるが、これに限定されるものではない。上記溶接は、次の形式、すなわち、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接、アーク溶接等の1つを含み得るが、これに限定されるものではない。
【0046】
1つの実施形態において、スポット溶接は、直流磁界を用いて磁化され、スポット溶接の周辺の磁界分布は、磁界カメラまたは他の磁界マッピング装置を用いて測定される。本発明に従った最適化アルゴリズムは、この測定された磁界マップに適用される。シミュレーションモデルは、磁化されたスポット溶接の磁界分布を計算し得るモデルならいかなるモデルでもあり得る。スポット溶接は、溶接の平面および溶接に対して垂直な平面を含んだいかなる方向に沿っても磁化され得る。
【0047】
別の実施形態において、予め計算された磁界分布の原理が、シミュレーションおよび測定され得る他の物理的性質に適用される。
【実施例】
【0048】
以下は、本発明を永久磁石に適合するいくつかの実施例である。
【0049】
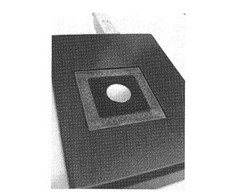
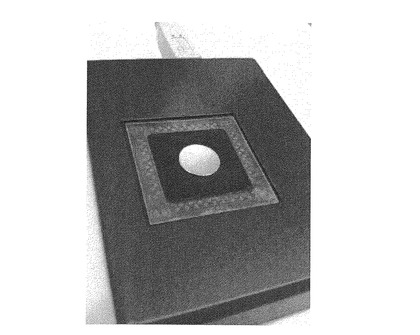
図1は、13mm*13mmの領域の128×128のホール磁界センサ(=16384のセンサ)を伴う磁界カメラ測定装置に設置された、軸方向への磁化を伴う円筒形状磁石を示す図である。アレイ全体は、1秒未満で測定される。
【0050】
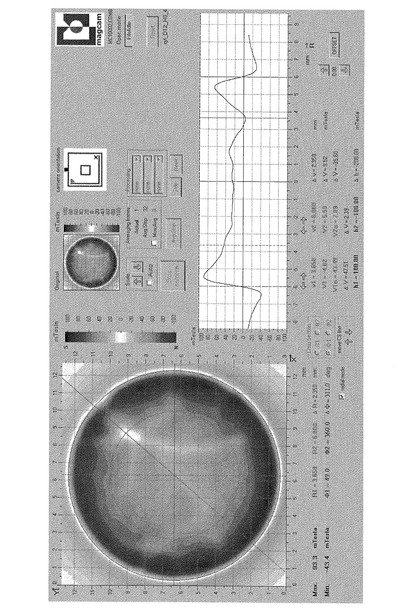
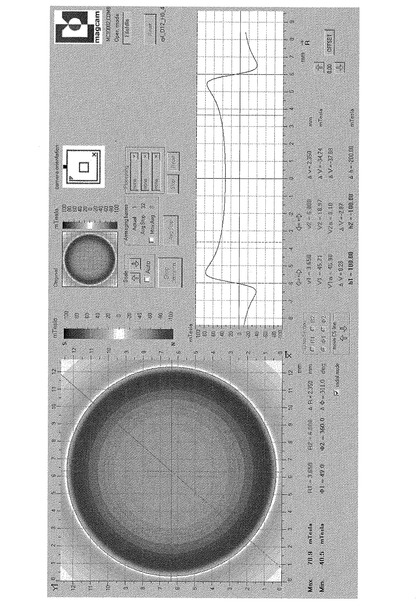
図2は、図1に示されている磁石の、測定された磁界分布を示す図である。測定された磁界の成分はBz成分であり、磁界カメラセンサに対して直交している。
【0051】
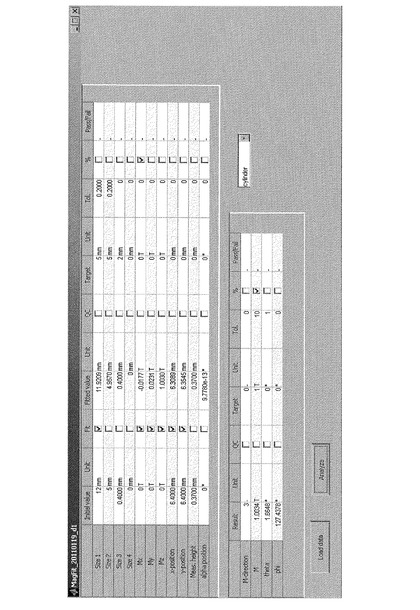
図3は、図1および図2の磁石に対する本発明に従った最適化手順の結果を示す図である。測定データは「Load data」ボタンを用いることにより読み込まれる。分析に際し、磁石の幾何学的な形状(「cylinder」)は、右側のドロップダウンボックスにおいて選択される。大きな表の第1の列(「Initial value」)は、最適化手順に対する初期値(開始値)を示している。これらの初期値に基づいて、予め計算されたシミュレート済の磁界分布が、ライブラリから読み込まれるか、または、それらがまだ存在していない場合は計算される。パラメータの名称は左側に示されている。第3の列(「Fit」)により、最適化に含めるパラメータ、および、固定したままにするパラメータの選択が可能になる。最適化手順は、「Analyze」ボタンを用いることにより開始される。上記プロセスが完了すると、「Fitted value」の列は選択された適合パラメータに対する最適値を示す。この実施例において、適合パラメータは、円筒の直径(「Size1」)、磁化ベクトルの成分(Mx、My、Mz)、およびXY平面における磁石の中心位置(「x-position」および「y-position」)を含んでいる。なお、最大の磁化成分はMzであり、MxおよびMyは0でない値である。これらの0でない値により、主磁化軸(Z軸)からの磁化ベクトルの偏角(theta)が生じる。これは下方の小さな表に示されており、磁化ベクトルは球座標で示されている。定量的に最適化された適合パラメータ(および磁化ベクトルの球座標のような導出されたパラメータ)は、目標値と許容誤差との範囲が各パラメータ(「QC」、「Target」、「Tol.」および「Pass/Fail」の列を参照)に対して設定され得る適合/不適合(pass/fail)の分析に含まれ得る。予め計算されたスキームを用いた分析全体には、2秒もかからない。
. 図4は、図1および図2の磁石の、理論的に最良適合された磁界分布を示す図である。最適化されたパラメータは、図3のパラメータである。これが、「完全な」理論的な磁界分布である。
【0052】
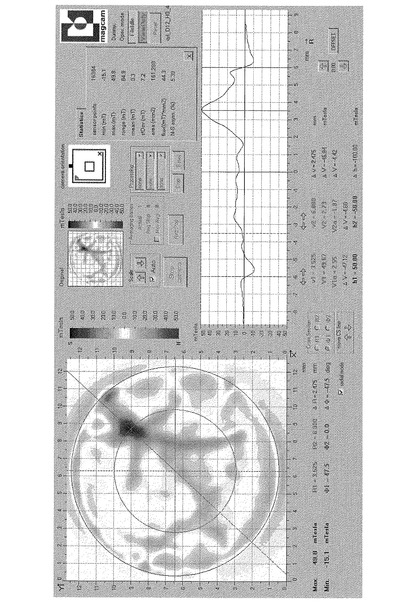
図5は、上図における分析から生じた(測定データに適合する)残差磁界分布を示す図である。この残差マップは、測定磁石における全ての「不完全性」を示しており、例えば、図4のシミュレーションされた「完全に」磁界分布から逸脱する、磁界分布における全ての特性を示している。この残差図は、材料の欠陥検出および特性、ならびに磁界の(不)均質性分析等のような分析を可能にする。後者に関しては、「完全な」磁界に起因するバックグラウンドが除去されるため、残差画像の画像統計により、上部右側の「Statistic」枠に見られるように、完全な磁石に対しての磁石の(不)均質性の関連情報が与えられる。例えば、適合/不適合の分析に用いられる有用な値には、最小および最大の磁界、範囲、平均値、標準偏差、N極−S極の非対称性等が含まれている。
【0053】
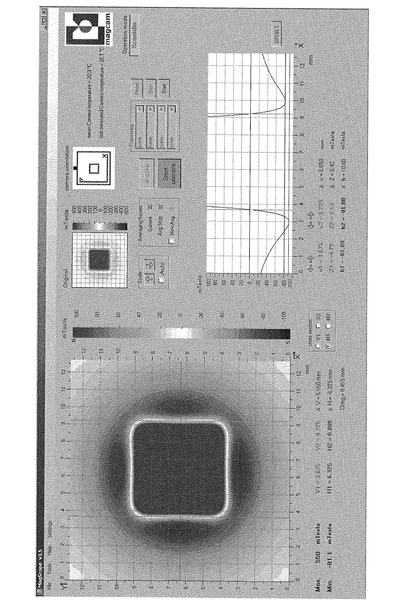
図6は、a=b=5mmおよびc=2mmのブロック磁石の、測定された磁界分布を示す図である。測定された磁界の成分は、磁界カメラセンサに対して直交しているBz成分である。
【0054】
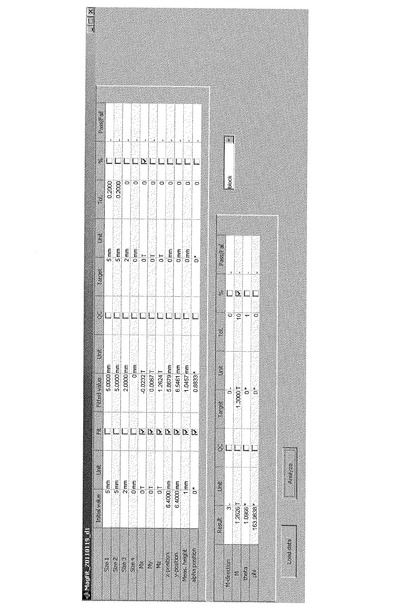
図7は、図6の磁石に対する、本発明に従った最適化手順の結果を示す図である。測定データは、「Load data」ボタンを用いることにより読み込まれる。分析に際して、磁石の形状は、右側のドロップダウンボックスにより選択される(「block」)。大きな表の第1の列(「Initial value」)は、最適化手順に対する初期値(開始値)を示している。これらの初期値に基づいて、予め計算されたシミュレーション済の磁界分布は、ライブラリから読み込まれるか、または、それらがまだ存在していない場合に計算される。パラメータの名称は、左側に表示されている。第3の列(「Fit」)により、最適化に含めるパラメータ、および、固定したままにするパラメータの選択が可能になる。「Fitted value」の列は、選択された適合パラメータに対する最適値を示している。この実施例において、適合パラメータは、磁化ベクトル成分(Mx、My、Mz)、XY平面における磁石の中心位置(「x-position」および「y-position」)が含まれている。なお、最大の磁化成分はMzであり、MxおよびMyは0でない値である。これらの0でない値により、主磁化軸(Z軸)からの磁化ベクトルの偏角(theta)が生じる。これは下方の小さな表に示されており、磁化ベクトルは球座標により示されている。定量的に最適化された適合パラメータ(および磁化ベクトルの球座標のような導出されたパラメータ)は、目標値と許容誤差との範囲が設定され得る適合/不適合の分析に含まれ得る(「QC」、「Target」、「Tol.」、および「Pass/Fail」の列を参照)。予め計算されたスキームを用いた分析全体には、2秒もかからない。
【0055】
本発明の実施形態に従った上記方法は、図8において概略的に示されているように、処理システム200において実行されてもよい。図8は、処理システム200の1つの構成を示している。処理システム200は、例えばRAM、ROM、および等のメモリの少なくとも1つの形状を含むメモリサブシステム42に結合されている、少なくとも1つのカスタマイズ可能な、または、プログラム可能なプロセッサ41を含んでいる。なお、プロセッサ41または複数のプロセッサが、汎用プロセッサまたは特殊用途のプロセッサであってもよく、他の機能を実行する他の構成要素を有する装置(例えばチップ)に含まれていてもよい。それ故、本発明の実施形態に従った上記方法の1つ以上の態様は、デジタル電子回路、またはコンピュータのハードウェア、ファームウェア、ソフトウェア、あるいはその組合せにおいて実行され得る。上記処理システムは、少なくとも1つのディスクドライブ、および/またはCD−ROMドライブ、および/またはDVDドライブを有する記憶サブシステム43を含んでいてもよい。幾つかの実行において、ユーザが情報を入力するために、または、操作を調整するために、ユーザインターフェースサブシステム44が設けられていてもよい。ネットワーク接続、種々の装置へのインターフェース等の、より多くの要素は、幾つかの実施形態に含まれていてもよいが、図8には示されていない。具体的には、インターフェースは、上述した磁界カメラのアウトプットを受信するために設けられている。処理システム40の種々の要素は、種々の方法により結合されていてもよい。この結合には、簡単化のために単一のバスとして図8に示されているバスサブシステム45を介する結合が含まれているが、これには少なくとも1つのバスシステムが含まれることが当業者には理解されるであろう。メモリサブシステム42のメモリは、処理システム40で実行されるとき、ここで記述されている方法の実施形態のステップを実行する命令の組の一部または全部を保持してもよい。
【0056】
従って、本発明はまた、コンピュータデバイスで実行されるとき、本発明の実施形態に従ったいかなる方法の機能性も提供するコンピュータプログラムを含んでいる。このようなコンピュータプログラムは、プログラム可能なプロセッサにより実行されるためのコンピュータ読み取り可能なコードを搬送する搬送媒体において非一時的に明確に実行され得る。それ故、本発明は、計算手段にて実行されるとき、上述のいかなる方法も実行するための命令を与えるコンピュータプログラムを搬送する搬送媒体に関している。「搬送媒体」という用語は、実行するためのプロセッサに命令を与えることに関わるいかなる媒体も表している。このような媒体は、不揮発性媒体および伝送媒体を含んだ様々な形状を有し得るが、これに限定されるものではない。不揮発性媒体は、大容量記憶装置の一部である記憶装置のような光ディスクおよび磁気ディスクを含んでいる。コンピュータ読み取り可能な媒体の一般的な形態には、CD−ROM、DVD、フレキシブルディスクまたはフロッピー(登録商標)ディスク、テープ、メモリチップまたはメモリカートリッジ、もしくはコンピュータが読み取り可能である他のいかなる媒体も含まれる。コンピュータ読み取り可能な媒体の種々の形態が、実行するためのプロセッサへの1つ以上の命令の1つ以上のシーケンスの搬送に関連していてもよい。コンピュータプログラムはまた、LAN、WAN、またはインターネットのようなネットワークにおける搬送波を介して送信され得る。伝送媒体には、電波通信および赤外線通信時に生成される波のような音波または光波の形態を取り得る。伝送媒体には、同軸ケーブル、銅線および光ファイバーが含まれ、コンピュータ内にバスを備えたワイヤを含んでいる。
【0057】
従って、本発明はまた、適切なコンピュータデバイスで実行されるときに、本発明のいかなる方法も実行するソフトウェアを含む。適切なソフトウェアは、C言語のような適切な高水準言語にてプログラミングすること、および、対象のコンピュータプロセッサのための適切なコンパイラにおいてコンパイルすることによって取得され得る。対象のコンピュータプロセッサは、コンピュータシステムにおける汎用プロセッサ(CPU)、コンピュータシステムの画像プロセッサ(例えば、GPU)、ディスプレイシステムに存在する汎用処理装置、ディスプレイシステムに存在する図形プロセッサ(例えば、GPU)、ディスプレイシステムに存在する組み込みプロセッサ、LCDパネルまたはOLEDパネルまたはプラズマパネルのようなパネルに存在するプロセッサ、液晶表示パネルの駆動システムに存在するプロセッサであり得る(これは例であり、これに限定されるものではない)。
【0058】
従って、本発明は、磁性システムの入力パラメータの初期化された組に基づいて磁性システムを特徴付けるためのコンピュータプログラムを提供する。コードセグメントは、処理エンジンにて実行されるとき、磁界分布を測定すること、および、磁性システムの最適な期待磁界分布を決定することを考慮するように適合され得る。
【0059】
他の態様において、本発明は、モデルパラメータの組を最適化することによって、理論的シミュレーションモデルを測定データの組へ適合させるための方法に対するコンピュータプログラムを提供し、実際の最適化手順が開始される前に、モデリング計算作業の全部または一部が実行されることを特徴とする(「事前計算」または「予め計算されたデータ」)。測定されたデータは、例えば磁界の値であり得る。好適な実施形態において、測定されたデータは、磁界カメラ装置から取得された磁界の値であり得る。コンピュータプログラムプロダクトは、非一時的な記憶媒体に任意に記憶され得る。コードセグメントは、処理エンジンで実行されるとき、上記期待磁界分布の決定を可能にするように適合され得る。そして、
i)計算された磁界分布を理論的シミュレーションモデルを用いて決定することと、
ii)上記期待磁界分布を、上記測定された磁界分布の値と比較することと、
iii)磁性システムの期待磁界分布を取得するために最適化スキームを用いることと、
iv)期待磁界分布が、許容誤差内の測定された磁界分布と同じになるまで、i)、ii)およびiii)のステップを繰り返すことと、
を含むように適合され得る。
【0060】
コードセグメントは、処理エンジンで実行されるとき、理論的シミュレーションモデルを分析モデルにするように適合され得る。
【0061】
コードセグメントは、処理エンジンで実行されるとき、理論的シミュレーションモデルを有限要素モデルにするように適合され得る。
【0062】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが線形データ適合アルゴリズムを利用するように適合され得る。
【0063】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが非線形データ適合アルゴリズムを利用するように適合され得る。
【0064】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが補間アルゴリズムを利用するように適合され得る。
【0065】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが予め計算されたデータセットの線形結合を利用するように適合され得る。
【技術分野】
【0001】
本発明は、磁石、磁性アセンブリ、磁性体(これらのすべては「磁性システム」と呼ばれている)およびこのような磁性システムを含む製品の、磁気測定、磁気検査、研究、開発および品質管理の分野に位置づけられる。より具体的には、本発明は、磁性システムの磁界の2次元マッピングから情報を抽出するための方法に関する。この磁性マッピングは、1つの実施形態において「磁界カメラ」システムから取得され得る。当該磁界カメラシステムは、高解像度の2次元磁界マップを高速に記録でき、これにより、例えば磁性システムの迅速な品質管理において、このプロセスを適用することが可能になる。磁界マップからの情報の抽出は、測定データを磁性モデルに基づいて磁性システムから得たシミュレーションデータまたは計算データと比較することにより行われる。磁性モデルの入力パラメータは、測定データに最良に適合するように変更され、最適化される。そして、結果として生じた最適化された入力パラメータにより、所要の追加情報が与えられる。
【背景技術】
【0002】
既存の磁気測定技術は、磁石または磁性システムの特定のパラメータの1つを主に測定する。例えば、ガウスメータは、空間における1つの位置での磁界を測定する。例えば、ヘルムホルツコイルは、磁石の統合された磁気モーメントを測定する。近年、新たな磁気測定の方法および装置が発明された。当該方法および装置は、「磁界カメラ」と呼ばれており、高解像度の2次元磁界マップを高速に記録できる。このシステムは磁界センサの集積化2Dアレイを有している半導体チップから成り、磁界センサのそれぞれは局所的な磁界を個別に測定する。アレイにおけるセンサは、十分に制御されている標準的なチップ製造プロセスに起因して、極めて正確に定義された相対距離を空けて接近させて配置されている。個別に磁界を測定する多数のピクセルは、結果として生じた磁界マップ内に含まれている膨大な情報をもたらす。当該情報は、簡単に明らかになるものではなく、先進的なデータ分析(例えば、本発明に記載の方法)を用いてのみ抽出され得る。
【0003】
一方、磁界シミュレーションは、磁石および磁性システムの研究、開発、および設計のために広く用いられている。多くの磁界シミュレーションソフトウェアのプログラムが市販されている。その大半は、有限要素モデリング(FEM)アルゴリズムを用いており、磁石および磁性システムの他に、非磁性体の、複雑な形状および組合せのシミュレーションを可能にする。FEMに基づいたこれらのアルゴリズムの他に、分析表現はまた、非常に対照的かつ単純な、磁石の幾何学的形状の多く(例えば、ブロック、球形、回転楕円体および楕円体)のために存在している。分析モデルは、FEMモデルよりも迅速に計算し得るが、シミュレートできる磁性システムの種類において制限されている。例えば、分析モデルは、一様に磁化している磁石のみシミュレートし得る。また、分析モデルは、1でない相対透磁性を含んでいるシステムをシミュレートし得ない。
【0004】
分析モデルは、例えば一様に磁化された球体、ブロック磁石(R. Engel-Herbert and T. Hesjedal, ‘Calculation of the magnetic stray field of a uniaxial magnetic domain’, JOURNAL OF APPLIED PHYSICS 97, 074504, 2005を参照)、および回転楕円体(M. Tejedor, H. Rubio, L. Elbaile, and R. Iglesias, ‘External Fields Created by Uniformly Magnetized Ellipsoids and Spheroids’, IEEE TRANSACTIONS ON MAGNETICS. VOL. 31, NO. I., JANUARY 1995を参照)のために存在する。他の形状(例えば、円柱、円、円弧等)は、複数のこれら基本的な形状を組み上げることによって構築され得る。例えば、何れの形状も、ブロック磁石の実質的に大きな集合により近似され得る。ブロック磁石の集合の磁界は相加的であるので、磁界分布全体を取得するために、全てのブロック磁石の磁界分布がすべて単純に加算され得る。
【発明の概要】
【課題を解決するための手段】
【0005】
本発明の態様は、添付の特許請求の範囲において規定されている。本発明の実施形態に関する特定の非限定的な記載が、以下に為されている。
【0006】
本発明の一態様において、理論的シミュレーションモデルをモデルパラメータの組を最適化することにより測定されたデータの組に適合させるための方法が提供される。当該方法は、実際の最適化手順が開始される前に、モデリング計算作業の全部または一部が実施されること(「事前計算」または「予め計算されたデータ」)を特徴としている。測定されたデータは、例えば磁界の値であり得る。好ましい実施形態において、測定されたデータは、磁界カメラ装置から取得された磁界の値である。
【0007】
計算速度の利点をもたらすために、理論的シミュレーションモデルは分析モデルであり得る。
【0008】
また、理論的シミュレーションモデルは、有限要素法(FEM)モデルであり得る。
【0009】
最適化スキームは、線形データ適合アルゴリズムまたは非線形データ適合アルゴリズムを用い得る。
【0010】
モデルパラメータは、磁化ベクトル成分、位置座標、大きさの幾つかまたはすべてを含み得る。
【0011】
1つの実施形態において、事前計算は、磁界分布の組を計算することを含んでいる。
【0012】
最適化手順には、予め計算されたデータセットの線形結合の作成、および、予め計算されたデータセットにおける補間アルゴリズムのような種々の選択肢が可能である。
【0013】
上記最適化スキームにより、最良適合のシミュレーション済データセット、および、最良適合のデータセットと測定されたデータセットとの差である残差データセットが生じ得る。
【0014】
本発明は、永久磁石の検査および/または品質管理、単軸磁化を有する永久磁石の検査および/または品質管理、多極磁化を有する永久磁石の検査および品質管理、強磁性体、常磁性体、反磁性体、磁歪体および/または超電導体および/または磁気応答の他の形態を有する材料の検査および/または品質管理、電磁石の検査および/または品質管理、磁性アセンブリの検査および/または品質管理、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接、アーク溶接等を含んだ溶接の検査および/または品質管理に有利に適用されてもよい。
【0015】
本発明の1つの態様において、測定された磁性システムの特性の情報を抽出するために、測定された磁界マップと測定された磁性システムの理論的シミュレーションとを組み合わせる迅速な方法が提供される。当該方法は、測定のみまたはシミュレーションのみによって取得され得ない。物理的磁性システムは、シミュレーションモデルによって、シミュレートされるか、または、少なくとも近似されると仮定される。ここで、後者には、FEMモデル、分析モデル、または、他の種類のモデルも用いられ得る。
【0016】
シミュレーションモデルには、測定された磁界分布と比較され得る磁界分布を、計算またはシミュレーションするための入力パラメータの組が必要であると仮定される。一般に、これらの入力パラメータは、例えば、形状、大きさ、位置、磁化ベクトルまたは構造等の磁性システムの物理的特性であるが、これに限定されはしない。最適化手順が適用されるとき、入力パラメータは、通常、最適化手順が開始される初期値を有している。最適化手順の目的は、計算またはシミュレーションされた磁界分布と測定された磁界分布との全体的な差を最小化することである。これは、最適化スキームに従ってモデル入力パラメータを変更することによって実行され、測定された磁界分布とシミュレーションされた磁界分布との全体的な差における極小値または大域的最小値を(もし存在する場合は)求めることが可能になる。この全体的な差は、各データポイントでの差の二乗の和として、または、別のパラメータとして表され得る。最適化スキームは線形または非線形であり得る。非線形の最適化スキームの例は、例えば、マトラボ(Matlab)における「lsqnonlin」関数に用いられる「信用領域Reflective(trust-region-reflective)」アルゴリズムおよび「レーベンバーグ・マルカート(Levenberg-Marquardt)」アルゴリズムである。最適化が完了した後のモデル入力パラメータの最終値は、磁性システムの実際の物理的パラメータの近似値であり、それ故、測定結果とみなされ得る。
【0017】
本発明は、計算またはシミュレーションされたデータを測定データに適合させる上述の一般的な方法を大幅に高速化させる方法に関する。それによって、当該方法は、個々の磁性システムの構成について一度の計算しか必要としない予め計算されたシミュレーションデータを利用している。最適化手順の間、予め計算されたデータは、測定データへの最良適合を取得するために、線形結合スキームおよび補間スキームのような高速アルゴリズムを用いて処理されるが、これに限定されはしない。それ故、上記モデルの入力パラメータは、最適化手順の各繰り返しにおいて、システム全体の再シミュレーションを必要とせずに最適化される。
【0018】
上述のような最適化スキームが完了し、理論的モデルに対する全ての所望のパラメータが既知数になったとき、以下のデータ、すなわち、測定された磁界分布、シミュレーションされた最良適合の磁界分布、残差磁界分布、すなわち、測定された磁界分布と最良適合の理論的な磁界分布との差、モデルの最適化されたパラメータが処理される。これらのデータは、最適化分析を行わないときよりも簡単に算出されつつ分析され得る、測定された物理的システムについての膨大な情報を含んでいる。
【図面の簡単な説明】
【0019】
【図1】ホール磁界センサを有している磁界カメラ測定装置に設置されている、軸方向に磁化されている円筒形状の磁石を示す図である。
【図2】図1に示されている磁石の測定された磁界分布を示す図である。測定された磁界成分はBz成分であり、磁界カメラセンサに対して直交している。
【図3】図1および図2の磁石に対する、本発明に係る最適化手順の結果を示す図である。
【図4】図1および図2における磁石の理論的な最良適合の磁界分布を示す図である。
【図5】上図における分析から生じる残差磁界分布(適合データ−測定データ)を示す図である。
【図6】a=b=5mmおよびc=2mmを有するブロック磁石の測定された磁界分布を示す図である。測定された磁界成分はBz成分であり、磁界カメラセンサに対して直交している。
【図7】図6の磁石に対する、本発明に係る最適化手順の結果を示す図である。
【図8】本発明と共に用いられる概略的な処理エンジン装置またはコンピュータシステムを示す図である。
【発明を実施するための形態】
【0020】
本発明の1つの実施形態において、最適化手順は、次の方法において実行される。特定の幾何学的形状を有する、均一に磁化された磁石を想定する。例えばデカルト座標系のX、Y、およびZ方向のそれぞれに沿って3つの側面a、bおよびcを有するブロック磁石である。上記磁石は、座標系の原点にその中心が設置されている。磁界カメラ装置(すなわち、磁界センサの2次元アレイを備えている磁界センサ)は、磁石より下に距離d(dはZ方向)を隔てたXY平面における磁石の磁界分布を記録するために、磁石の下に設置されている。磁界カメラは、XY平面におけるのA=L*Wの感知領域を有し、(本実施形態では)磁界のZ成分、すなわちBz(x,y,z)のみを記録する。ここで、zは、磁界カメラの2次元性に起因して固定される。座標系のX軸およびY軸は、磁界カメラにおけるセンサアレイの行および列に対して平行であると仮定する。その目的は、数あるパラメータ(以下参照)の中でも、それぞれ3つの座標軸に沿った成分Mx、MyおよびMzを有している、物理的ブロック磁石の磁化ベクトルMを求めることである。Mを除いた、上記モデルの他の入力パラメータが(略)明らかであるとき、以下の手順が適合され得る。磁化M=(Mx,My,Mz)を有している磁石の磁界分布は、次式のように3つの磁界分布の線形結合として表され得ると仮定され、3つの磁界分布のそれぞれは、Mの1つの成分に対応している磁化を有する磁石により生成される。
【0021】
【数1】
【0022】
ただし、Bz(x,y,z)(Mx,My,Mz)は、磁化ベクトルM=(Mx,My,Mz)を有する磁石により生成された、位置(x,y,z)での磁界ベクトルのz成分である。式(1)において、BとMとの間の線形的な関係が仮定される。すなわち、B(M)=M*B(1)と仮定される。ここで、B(M)は、磁化Mを有する磁石により生成された磁界である。
【0023】
Mx、MyおよびMzが最適化手順における未知数のパラメータである一方、Bz(x,y,z)(1,0,0)、Bz(x,y,z)(0,1,0)およびBz(x,y,z)(0,0,1)の値(分布)は、予め、すなわち最適化手順が開始される前に計算され得る。特にFEMモデルが用いられるとき、および/または、広域がカバーされるときおよび空間分解能が大きいとき、これらの値は、事実上、計算に長時間を要し得る磁界分布全体を示す。さらに、これらの磁界分布は、磁石の幾何学的な形状または磁性システムの構造のそれぞれに対して一度しか計算される必要がない。そして、最適化は、線形結合(1)が測定された磁界分布に対して最適化されるMx、MyおよびMzの最適値を求めることのみを含む。この手順は、事前の計算が一度だけ必要である多くの同様の磁石の、例えば、高速インライン検査を可能にする。
【0024】
本発明の別の実施形態において、他のパラメータもまた未知数であるとき、上記の高速な最適化スキームは次の方法において適合され得る。以下のパラメータが前述の実施形態と同一の設定に対して未知数であると仮定する。Mは次式のように表される。
【0025】
【数2】
【0026】
ここで、
M=(Mx,My,Mz)は、測定された磁石の磁化ベクトルであり、
aおよびbは、測定された磁石の側面のサイズであり、
X_positionおよびY_positionは、測定された磁石の中心のXY平面における正確な位置であり、
Alpha_positionは、XY平面における測定された磁石の角度位置、すなわちa軸およびb軸が、(カメラアレイにおけるセンサ軸に対して平行である、)座標系のX軸およびY軸を用いて成す角度である。
【0027】
上記のパラメータが未知数であるとき、磁界の再計算または再シミュレーションをせずに、予め計算された磁界分布が、高速な最適化を実行するために依然として用いられ得る。これは、異なるパラメータの(サブセットの)連続最適化および/または同時最適化を用いて遂行され得る。ここで、各パラメータに対する最適化を別々に行う一般的な方法を記載する。実際には、より良い結果を取得するために、より多くのパラメータが同時に最適化される。
【0028】
第1の近似がM=(Mx,My,Mz)に対して既に求められていると仮定する。一般に、物理的な磁石は、座標系の正確な原点には配置されずに、XY平面における未知数の位置(X_position, Y_position)にその中心を有している。計算された磁界マップBz(x,y,z)(1,0,0)、Bz(x,y,z)(0,1,0)およびBz(x,y,z)(0,0,1)が、磁界カメラのセンサ領域よりも広域の部分において計算されると仮定する。既に求められている近似されたMx値、My値およびMx値を用いることにより、座標系の原点における磁石に対する磁界マップは、略既知数となる。しかしながら、測定された磁界マップは、測定されたマップに対する、XY平面におけるオフセットの位置を有する。上記手順は、現在、計算されたマップをベクトル(X_shift, Y_shift)にシフトさせること、および、測定されたマップと計算されたマップとの重複(オーバーラップ)が最適になるX_shift値およびY_shift値を求めることにより構成される。実際には、これは次の方法において行われる。計算されたマップの測定されたマップへの一般的なシフト(X_shift, Y_shift)に対して、双方のマップのデータポイントの位置は一致しない。
【0029】
従って、測定されたマップにおけるデータポイントに対応するポイントでの理論的な磁界値を計算するように、理論的なマップが補間される。これは、理論的なマップおよび測定されたマップを直接差し引くこと、ならびに平方和を計算することを可能にする。ここでの1つの要点は、補間することが、磁界をシミュレーションするよりも大幅に高速のプロセスであることである。従って、この補間プロセスは、最適値が求められるまで複数のシフト(X_shift, Y_shift)に対して連続して実行される。(X_shift, Y_shift)=(X_position, Y_position)の最適値が、磁石の物理的な位置をより明確に示す。
【0030】
実際には、(X_shift, Y_shift)は、Mx、MyおよびMzと同時に最適化され得る。本発明の別の実施形態では、次の方法において、前述の処理をより直接的にAlpha_positionにまで拡張する。一般に、物理的な磁石は、X軸およびY軸と正確に一直線を成すa軸およびb軸を有さないが、XY平面における角度Alpha_position回転される。一度(X_position, Y_position)が既知数となれば、計算されたマップは、最適化された測定されたマップとの重複を求めるために、ポイント(X_position, Y_position)の周りに角度Alpha回転され得る。この場合、前述の実施形態における補間スキームと同様の補間スキームが適合され得る。
【0031】
最適値が求められるとき、最適化されたAlpha値が、Alpha_position、すなわちXY平面における磁石の回転角度に対応する。実際には、Alpha_positionは、Mx、MyおよびMzと同時に最適化され、最適な結果を取得するために、場合によって再度(X_position,Y_position)を伴って最適化される。前述の繰り返し(Alpha無しでの)からの初期パラメータが既に良い近似であるので、これらの変数を再度最適化に取り入れることにより、アルゴリズムに膨大な計算時間が追加されはしない。
【0032】
本発明の別の実施形態において、さらに一歩進めると、一度Mx、My、Mz、X_position、Y_positionおよびAlpha_positionに対する最適値が求められると、磁石の側面の大きさ(この場合、aおよびb)は、最良適合のために最適化され得る。しかしながら、実際に、磁界分布は、変更された磁石の大きさに対して再計算される必要があるので、この手順では、正確な結果は生じずに近似となる。しかしながら、初期値からの小さなズレに対し、この方法は、十分正確に機能しつつ、磁界分布全体を再計算するよりも大幅に速い。磁石の大きさを最適化する方法は、以下に説明されている。測定されたマップとより一致させるために、パラメータaおよびbは、最適化され、かつ既知数である、前述の他のパラメータを伴い、計算された磁界マップを「伸縮」または「圧縮」することにより最適化され得る。これは、計算格子に(XおよびYの両方向における)スケーリング因子を適合させることにより実行される。実際に最適化されているのは、これらのスケーリング因子である。初期のa値およびb値(または他の大きさの値)を最適化されたスケーリング因子により除算することにより、最適化された大きさがもたらされる。
【0033】
別の実施形態では、最適化手順に含めるパラメータ、および、初期値にて一定に維持しておくパラメータを選択し得る。
【0034】
上記の実施形態において記述されている最適化スキームが完了し、理論的モデルに対する全ての所望のパラメータが既知数になるとき、以下のデータ、すなわち、測定された磁界分布、シミュレーションされた最良適合の磁界分布、残差磁界分布(すなわち、測定された磁界分布と最良適合の理論的な分布との差)、モデルの最適化パラメータが処理される。これらのデータは、測定された物理的システムについての大量の情報を含んでいる。結果として生じたこれらのデータが特定の適用のために用いられている、本発明に係る多くの実施形態が、以下に記述されている。
【0035】
1つの実施形態において、物理的システムの測定された特性として、最適化パラメータが用いられ得る。例えば、最適化磁化ベクトルM=(Mx,My,Mz)は、次式で表されるそのサイズについての情報を与える。
【0036】
【数3】
【0037】
それは、幾何学的な磁化軸からのズレについての情報も与える。磁石は、そのc軸(Z方向における)に沿って磁化されると仮定する。上述の最適化手順により、Mzが最大であるが、MxおよびMyに対しては0でない値を伴うM=(Mx,My,Mz)が生じる。(Mx,My,Mz)をデカルト座標から球座標(M,theta,phi)に変換することによって、c軸からの偏角(theta)および平面XYにおけるその投影角(phi)と同様に、Mの大きさを簡単に取得する。特に、Mおよびthetaに対しての値は、単軸磁化された永久磁石の品質を決定する重要な特性であり、本発明を用いることによって、検査の間、簡単に取得および評価され得る。本発明の別の実施形態において、XY平面における磁石の最適化された位置(角度位置を含む)は、例えば対象物の位置を正確に測定するため、またはフィードバックシステムとして最適化スキームを用いて対象物をアクティブに位置づけるために用いられ得る。
【0038】
別の実施形態において、残像は、物理的な磁石またはその磁化構造における不完全性を検出するために分析され得る。例えば、最初に測定された磁界マップにおいて明確でない、磁界分布における不均質性は、残差マップにおいて認識できるようになり得る。これらは、磁石における内部亀裂または不純物、磁気特性が異なっている領域、磁化における欠陥等を示し得る。この残像において、統計的な画像分析は、例えば適合/不適合(pass/fail)の品質管理のために用いられ得る定量的なパラメータを生じさせることによって実行され得る。
【0039】
別の実施形態において、「良質の」磁石とみなされている基準磁石は、本発明の最適化スキームを用いて分析され得る。その後、結果として生じた理論的なマップは、品質を決定する必要のある他の同様の磁石との比較のために用いられ得る。「良質であるが完全ではない」磁石(完全な磁石はない)と直接比較するかわりに、上記磁石は、最良適合の理論的等価物を求めることによって完全な磁石になる。この理論的等価物において、基準磁石をよりいっそう完全なものにするために、不完全性が除去され得る。例えば、上記磁石は、c方向(z方向)に沿った磁化を有すると仮定されるが、最適化分析では、少量のMx成分およびMy成分が示される。最適化された変数の他の全てを一定に保ちつつ、MxおよびMyを0に設定し、磁界分布を再計算することにより、これらの成分は、最適化分析の後に除去され得る。別の実施形態において、前述した全ての内容は、ブロック磁石を除いた、円筒形状の磁石、円形状の磁石、円弧形状の磁石、より複雑な形状の磁石等を含む全ての磁石の形状に適合するが、これに限定されるものではない。
【0040】
別の実施形態において、上述のすべては、複数の磁石の組合せ、磁性アセンブリおよび磁性システム、磁性システムを含む生成物等に適用される。
【0041】
別の実施形態において、上述のすべては、磁界カメラ装置MagCamを用いて測定された磁界分布に適用される。磁界カメラMagCamは、例えば感知領域を測定することにより、移動することなく磁界マップを記録できる。または、それは広域をカバーするために機械的に走査され得る。
【0042】
別の実施形態において、上述のすべては、磁界分布を取得するために磁性システム全体に亘り機械的に走査される離散的な磁界センサを用いて測定された磁界分布に適用される。上記離散磁界センサは、以下のタイプ、すなわち、ホール効果センサ、磁気抵抗センサ(AMR、GMR、TMR)、SQUIDセンサ、フラックスゲートセンサ、NMRセンサ等の1つまたはこれらの組合せであり得るが、これに限定されることはない。
【0043】
別の実施形態において、測定された磁界マップは、画像をまとめるアルゴリズムを用いて複数の磁界分布マップをまとめることによって取得される。
【0044】
別の実施形態において、上記は外部磁界を用いて磁化される軟磁性材料に適用される。
【0045】
別の実施形態において、鋼鉄、ニッケル、コバルトのような磁性材料における溶接に適用されるが、これに限定されるものではない。上記溶接は、次の形式、すなわち、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接、アーク溶接等の1つを含み得るが、これに限定されるものではない。
【0046】
1つの実施形態において、スポット溶接は、直流磁界を用いて磁化され、スポット溶接の周辺の磁界分布は、磁界カメラまたは他の磁界マッピング装置を用いて測定される。本発明に従った最適化アルゴリズムは、この測定された磁界マップに適用される。シミュレーションモデルは、磁化されたスポット溶接の磁界分布を計算し得るモデルならいかなるモデルでもあり得る。スポット溶接は、溶接の平面および溶接に対して垂直な平面を含んだいかなる方向に沿っても磁化され得る。
【0047】
別の実施形態において、予め計算された磁界分布の原理が、シミュレーションおよび測定され得る他の物理的性質に適用される。
【実施例】
【0048】
以下は、本発明を永久磁石に適合するいくつかの実施例である。
【0049】
図1は、13mm*13mmの領域の128×128のホール磁界センサ(=16384のセンサ)を伴う磁界カメラ測定装置に設置された、軸方向への磁化を伴う円筒形状磁石を示す図である。アレイ全体は、1秒未満で測定される。
【0050】
図2は、図1に示されている磁石の、測定された磁界分布を示す図である。測定された磁界の成分はBz成分であり、磁界カメラセンサに対して直交している。
【0051】
図3は、図1および図2の磁石に対する本発明に従った最適化手順の結果を示す図である。測定データは「Load data」ボタンを用いることにより読み込まれる。分析に際し、磁石の幾何学的な形状(「cylinder」)は、右側のドロップダウンボックスにおいて選択される。大きな表の第1の列(「Initial value」)は、最適化手順に対する初期値(開始値)を示している。これらの初期値に基づいて、予め計算されたシミュレート済の磁界分布が、ライブラリから読み込まれるか、または、それらがまだ存在していない場合は計算される。パラメータの名称は左側に示されている。第3の列(「Fit」)により、最適化に含めるパラメータ、および、固定したままにするパラメータの選択が可能になる。最適化手順は、「Analyze」ボタンを用いることにより開始される。上記プロセスが完了すると、「Fitted value」の列は選択された適合パラメータに対する最適値を示す。この実施例において、適合パラメータは、円筒の直径(「Size1」)、磁化ベクトルの成分(Mx、My、Mz)、およびXY平面における磁石の中心位置(「x-position」および「y-position」)を含んでいる。なお、最大の磁化成分はMzであり、MxおよびMyは0でない値である。これらの0でない値により、主磁化軸(Z軸)からの磁化ベクトルの偏角(theta)が生じる。これは下方の小さな表に示されており、磁化ベクトルは球座標で示されている。定量的に最適化された適合パラメータ(および磁化ベクトルの球座標のような導出されたパラメータ)は、目標値と許容誤差との範囲が各パラメータ(「QC」、「Target」、「Tol.」および「Pass/Fail」の列を参照)に対して設定され得る適合/不適合(pass/fail)の分析に含まれ得る。予め計算されたスキームを用いた分析全体には、2秒もかからない。
. 図4は、図1および図2の磁石の、理論的に最良適合された磁界分布を示す図である。最適化されたパラメータは、図3のパラメータである。これが、「完全な」理論的な磁界分布である。
【0052】
図5は、上図における分析から生じた(測定データに適合する)残差磁界分布を示す図である。この残差マップは、測定磁石における全ての「不完全性」を示しており、例えば、図4のシミュレーションされた「完全に」磁界分布から逸脱する、磁界分布における全ての特性を示している。この残差図は、材料の欠陥検出および特性、ならびに磁界の(不)均質性分析等のような分析を可能にする。後者に関しては、「完全な」磁界に起因するバックグラウンドが除去されるため、残差画像の画像統計により、上部右側の「Statistic」枠に見られるように、完全な磁石に対しての磁石の(不)均質性の関連情報が与えられる。例えば、適合/不適合の分析に用いられる有用な値には、最小および最大の磁界、範囲、平均値、標準偏差、N極−S極の非対称性等が含まれている。
【0053】
図6は、a=b=5mmおよびc=2mmのブロック磁石の、測定された磁界分布を示す図である。測定された磁界の成分は、磁界カメラセンサに対して直交しているBz成分である。
【0054】
図7は、図6の磁石に対する、本発明に従った最適化手順の結果を示す図である。測定データは、「Load data」ボタンを用いることにより読み込まれる。分析に際して、磁石の形状は、右側のドロップダウンボックスにより選択される(「block」)。大きな表の第1の列(「Initial value」)は、最適化手順に対する初期値(開始値)を示している。これらの初期値に基づいて、予め計算されたシミュレーション済の磁界分布は、ライブラリから読み込まれるか、または、それらがまだ存在していない場合に計算される。パラメータの名称は、左側に表示されている。第3の列(「Fit」)により、最適化に含めるパラメータ、および、固定したままにするパラメータの選択が可能になる。「Fitted value」の列は、選択された適合パラメータに対する最適値を示している。この実施例において、適合パラメータは、磁化ベクトル成分(Mx、My、Mz)、XY平面における磁石の中心位置(「x-position」および「y-position」)が含まれている。なお、最大の磁化成分はMzであり、MxおよびMyは0でない値である。これらの0でない値により、主磁化軸(Z軸)からの磁化ベクトルの偏角(theta)が生じる。これは下方の小さな表に示されており、磁化ベクトルは球座標により示されている。定量的に最適化された適合パラメータ(および磁化ベクトルの球座標のような導出されたパラメータ)は、目標値と許容誤差との範囲が設定され得る適合/不適合の分析に含まれ得る(「QC」、「Target」、「Tol.」、および「Pass/Fail」の列を参照)。予め計算されたスキームを用いた分析全体には、2秒もかからない。
【0055】
本発明の実施形態に従った上記方法は、図8において概略的に示されているように、処理システム200において実行されてもよい。図8は、処理システム200の1つの構成を示している。処理システム200は、例えばRAM、ROM、および等のメモリの少なくとも1つの形状を含むメモリサブシステム42に結合されている、少なくとも1つのカスタマイズ可能な、または、プログラム可能なプロセッサ41を含んでいる。なお、プロセッサ41または複数のプロセッサが、汎用プロセッサまたは特殊用途のプロセッサであってもよく、他の機能を実行する他の構成要素を有する装置(例えばチップ)に含まれていてもよい。それ故、本発明の実施形態に従った上記方法の1つ以上の態様は、デジタル電子回路、またはコンピュータのハードウェア、ファームウェア、ソフトウェア、あるいはその組合せにおいて実行され得る。上記処理システムは、少なくとも1つのディスクドライブ、および/またはCD−ROMドライブ、および/またはDVDドライブを有する記憶サブシステム43を含んでいてもよい。幾つかの実行において、ユーザが情報を入力するために、または、操作を調整するために、ユーザインターフェースサブシステム44が設けられていてもよい。ネットワーク接続、種々の装置へのインターフェース等の、より多くの要素は、幾つかの実施形態に含まれていてもよいが、図8には示されていない。具体的には、インターフェースは、上述した磁界カメラのアウトプットを受信するために設けられている。処理システム40の種々の要素は、種々の方法により結合されていてもよい。この結合には、簡単化のために単一のバスとして図8に示されているバスサブシステム45を介する結合が含まれているが、これには少なくとも1つのバスシステムが含まれることが当業者には理解されるであろう。メモリサブシステム42のメモリは、処理システム40で実行されるとき、ここで記述されている方法の実施形態のステップを実行する命令の組の一部または全部を保持してもよい。
【0056】
従って、本発明はまた、コンピュータデバイスで実行されるとき、本発明の実施形態に従ったいかなる方法の機能性も提供するコンピュータプログラムを含んでいる。このようなコンピュータプログラムは、プログラム可能なプロセッサにより実行されるためのコンピュータ読み取り可能なコードを搬送する搬送媒体において非一時的に明確に実行され得る。それ故、本発明は、計算手段にて実行されるとき、上述のいかなる方法も実行するための命令を与えるコンピュータプログラムを搬送する搬送媒体に関している。「搬送媒体」という用語は、実行するためのプロセッサに命令を与えることに関わるいかなる媒体も表している。このような媒体は、不揮発性媒体および伝送媒体を含んだ様々な形状を有し得るが、これに限定されるものではない。不揮発性媒体は、大容量記憶装置の一部である記憶装置のような光ディスクおよび磁気ディスクを含んでいる。コンピュータ読み取り可能な媒体の一般的な形態には、CD−ROM、DVD、フレキシブルディスクまたはフロッピー(登録商標)ディスク、テープ、メモリチップまたはメモリカートリッジ、もしくはコンピュータが読み取り可能である他のいかなる媒体も含まれる。コンピュータ読み取り可能な媒体の種々の形態が、実行するためのプロセッサへの1つ以上の命令の1つ以上のシーケンスの搬送に関連していてもよい。コンピュータプログラムはまた、LAN、WAN、またはインターネットのようなネットワークにおける搬送波を介して送信され得る。伝送媒体には、電波通信および赤外線通信時に生成される波のような音波または光波の形態を取り得る。伝送媒体には、同軸ケーブル、銅線および光ファイバーが含まれ、コンピュータ内にバスを備えたワイヤを含んでいる。
【0057】
従って、本発明はまた、適切なコンピュータデバイスで実行されるときに、本発明のいかなる方法も実行するソフトウェアを含む。適切なソフトウェアは、C言語のような適切な高水準言語にてプログラミングすること、および、対象のコンピュータプロセッサのための適切なコンパイラにおいてコンパイルすることによって取得され得る。対象のコンピュータプロセッサは、コンピュータシステムにおける汎用プロセッサ(CPU)、コンピュータシステムの画像プロセッサ(例えば、GPU)、ディスプレイシステムに存在する汎用処理装置、ディスプレイシステムに存在する図形プロセッサ(例えば、GPU)、ディスプレイシステムに存在する組み込みプロセッサ、LCDパネルまたはOLEDパネルまたはプラズマパネルのようなパネルに存在するプロセッサ、液晶表示パネルの駆動システムに存在するプロセッサであり得る(これは例であり、これに限定されるものではない)。
【0058】
従って、本発明は、磁性システムの入力パラメータの初期化された組に基づいて磁性システムを特徴付けるためのコンピュータプログラムを提供する。コードセグメントは、処理エンジンにて実行されるとき、磁界分布を測定すること、および、磁性システムの最適な期待磁界分布を決定することを考慮するように適合され得る。
【0059】
他の態様において、本発明は、モデルパラメータの組を最適化することによって、理論的シミュレーションモデルを測定データの組へ適合させるための方法に対するコンピュータプログラムを提供し、実際の最適化手順が開始される前に、モデリング計算作業の全部または一部が実行されることを特徴とする(「事前計算」または「予め計算されたデータ」)。測定されたデータは、例えば磁界の値であり得る。好適な実施形態において、測定されたデータは、磁界カメラ装置から取得された磁界の値であり得る。コンピュータプログラムプロダクトは、非一時的な記憶媒体に任意に記憶され得る。コードセグメントは、処理エンジンで実行されるとき、上記期待磁界分布の決定を可能にするように適合され得る。そして、
i)計算された磁界分布を理論的シミュレーションモデルを用いて決定することと、
ii)上記期待磁界分布を、上記測定された磁界分布の値と比較することと、
iii)磁性システムの期待磁界分布を取得するために最適化スキームを用いることと、
iv)期待磁界分布が、許容誤差内の測定された磁界分布と同じになるまで、i)、ii)およびiii)のステップを繰り返すことと、
を含むように適合され得る。
【0060】
コードセグメントは、処理エンジンで実行されるとき、理論的シミュレーションモデルを分析モデルにするように適合され得る。
【0061】
コードセグメントは、処理エンジンで実行されるとき、理論的シミュレーションモデルを有限要素モデルにするように適合され得る。
【0062】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが線形データ適合アルゴリズムを利用するように適合され得る。
【0063】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが非線形データ適合アルゴリズムを利用するように適合され得る。
【0064】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが補間アルゴリズムを利用するように適合され得る。
【0065】
コードセグメントは、処理エンジンで実行されるとき、最適化スキームが予め計算されたデータセットの線形結合を利用するように適合され得る。
【特許請求の範囲】
【請求項1】
磁性システムの初期化された入力パラメータの組に基づいて上記磁性システムを特徴付けるための装置であって、
磁界分布を測定するための手段と、
上記磁性システムの最適期待磁界分布を決定するための手段と、
を備えている、
ことを特徴とする装置。
【請求項2】
i)計算された磁界分布を理論的シミュレーションモデルを用いて決定するための手段と、
ii)上記期待磁界分布と上記測定された磁界分布の値とを比較するための手段と、
iii)上記磁性システムの上記期待磁界分布を取得するために、最適化スキームを用いるための手段と、
を含んでいる、上記期待磁界分布を決定する手段を更に備えている、
ことを特徴とする請求項1に記載の装置。
【請求項3】
上記磁界分布を測定するための手段は、磁界カメラ装置である、
ことを特徴とする請求項1または2に記載の装置。
【請求項4】
上記入力パラメータは、磁化ベクトル成分、位置座標、および大きさの少なくとも1つを含んでいる、
ことを特徴とする請求項1から3の何れか1項に記載の装置。
【請求項5】
上記理論的シミュレーションモデルは、分析モデルおよび有限要素法モデルを含んでいるグループから選択される、
ことを特徴とする請求項1から4の何れか1項に記載の装置。
【請求項6】
上記最適化スキームは、線形データ適合アルゴリズム、非線形データ適合アルゴリズム、補間アルゴリズム、および、予め計算されたデータセットの線形結合の何れかを利用する、
ことを特徴とする請求項1から5の何れか1項に記載の装置。
【請求項7】
永久磁石、単軸磁化を有する永久磁石、多極磁化を有する磁石、強磁性体、常磁性体、反磁性体、磁歪体および/または超伝導体および/または磁性反応の他の形態を有する材料、電磁石、磁性アセンブリの何れかの検査および/または品質管理ための、または、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接およびアーク溶接等を含んだ溶接の検査および/または品質管理のための、請求項1から6の何れか1項に記載の装置の使用。
【請求項8】
磁性システムの初期化された入力パラメータの組に基づいて上記磁性システムを特徴付けるための方法であって、
磁界分布を測定するステップと、
上記磁性システムの最適期待磁界分布を決定するステップと、
を含んでいる、
ことを特徴とする方法。
【請求項9】
上記期待磁界分布を決定するステップは、
i)上記入力パラメータの上記初期化された値から、計算された磁界分布を理論的シミュレーションモデルを用いて決定するステップと、
ii)上記期待磁界分布と上記測定された磁界分布の値とを比較するステップと、
iii)上記磁性システムの上記期待磁界分布を取得するために、最適化スキームを用いるステップと、
iv)上記期待磁界分布が、許容誤差範囲内における上記測定された磁界分布の値と同一になるまで、ステップi)、ii)およびiii)を繰り返すステップと、
を含んでいる、
ことを特徴とする請求項8に記載の方法。
【請求項10】
上記測定されたデータは、磁界カメラ装置から取得された磁界の値である、
ことを特徴とする請求項8または9に記載の方法。
【請求項11】
上記入力パラメータは、磁化ベクトル成分、位置座標、および大きさの少なくとも1つを含んでいる、
ことを特徴とする請求項8から10の何れか1項に記載の方法。
【請求項12】
上記理論的シミュレーションモデルは、分析モデルまたは有限要素法モデルから選択される、
ことを特徴とする請求項8から11の何れか1項に記載の方法。
【請求項13】
上記最適化スキームは、線形データ適合アルゴリズム、非線形データ適合アルゴリズム、補間アルゴリズム、および、予め計算されたデータセットの線形結合の何れかを利用する、
ことを特徴とする請求項8から11の何れか1項に記載の方法。
【請求項14】
永久磁石、単軸磁化を有する永久磁石、多極磁化を有する磁石、強磁性体、常磁性体、反磁性体、磁歪体および/または超伝導体および/または磁性反応の他の形態を有する材料、電磁石、磁性アセンブリ、溶接、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接およびアーク溶接の何れかの検査および/または品質管理のための、請求項8から13の何れか1項に記載の装置の使用。
【請求項15】
磁性システムの入力パラメータの初期化された組に基づいて上記磁性システムを特徴付けるためのコンピュータプログラムであって、処理エンジンにて実行されるときに、磁界分布の測定と、上記磁性システムの最適期待磁界分布の決定とを行うように適合されたコードセグメントを含んでいる、ことを特徴とするコンピュータプログラム。
【請求項1】
磁性システムの初期化された入力パラメータの組に基づいて上記磁性システムを特徴付けるための装置であって、
磁界分布を測定するための手段と、
上記磁性システムの最適期待磁界分布を決定するための手段と、
を備えている、
ことを特徴とする装置。
【請求項2】
i)計算された磁界分布を理論的シミュレーションモデルを用いて決定するための手段と、
ii)上記期待磁界分布と上記測定された磁界分布の値とを比較するための手段と、
iii)上記磁性システムの上記期待磁界分布を取得するために、最適化スキームを用いるための手段と、
を含んでいる、上記期待磁界分布を決定する手段を更に備えている、
ことを特徴とする請求項1に記載の装置。
【請求項3】
上記磁界分布を測定するための手段は、磁界カメラ装置である、
ことを特徴とする請求項1または2に記載の装置。
【請求項4】
上記入力パラメータは、磁化ベクトル成分、位置座標、および大きさの少なくとも1つを含んでいる、
ことを特徴とする請求項1から3の何れか1項に記載の装置。
【請求項5】
上記理論的シミュレーションモデルは、分析モデルおよび有限要素法モデルを含んでいるグループから選択される、
ことを特徴とする請求項1から4の何れか1項に記載の装置。
【請求項6】
上記最適化スキームは、線形データ適合アルゴリズム、非線形データ適合アルゴリズム、補間アルゴリズム、および、予め計算されたデータセットの線形結合の何れかを利用する、
ことを特徴とする請求項1から5の何れか1項に記載の装置。
【請求項7】
永久磁石、単軸磁化を有する永久磁石、多極磁化を有する磁石、強磁性体、常磁性体、反磁性体、磁歪体および/または超伝導体および/または磁性反応の他の形態を有する材料、電磁石、磁性アセンブリの何れかの検査および/または品質管理ための、または、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接およびアーク溶接等を含んだ溶接の検査および/または品質管理のための、請求項1から6の何れか1項に記載の装置の使用。
【請求項8】
磁性システムの初期化された入力パラメータの組に基づいて上記磁性システムを特徴付けるための方法であって、
磁界分布を測定するステップと、
上記磁性システムの最適期待磁界分布を決定するステップと、
を含んでいる、
ことを特徴とする方法。
【請求項9】
上記期待磁界分布を決定するステップは、
i)上記入力パラメータの上記初期化された値から、計算された磁界分布を理論的シミュレーションモデルを用いて決定するステップと、
ii)上記期待磁界分布と上記測定された磁界分布の値とを比較するステップと、
iii)上記磁性システムの上記期待磁界分布を取得するために、最適化スキームを用いるステップと、
iv)上記期待磁界分布が、許容誤差範囲内における上記測定された磁界分布の値と同一になるまで、ステップi)、ii)およびiii)を繰り返すステップと、
を含んでいる、
ことを特徴とする請求項8に記載の方法。
【請求項10】
上記測定されたデータは、磁界カメラ装置から取得された磁界の値である、
ことを特徴とする請求項8または9に記載の方法。
【請求項11】
上記入力パラメータは、磁化ベクトル成分、位置座標、および大きさの少なくとも1つを含んでいる、
ことを特徴とする請求項8から10の何れか1項に記載の方法。
【請求項12】
上記理論的シミュレーションモデルは、分析モデルまたは有限要素法モデルから選択される、
ことを特徴とする請求項8から11の何れか1項に記載の方法。
【請求項13】
上記最適化スキームは、線形データ適合アルゴリズム、非線形データ適合アルゴリズム、補間アルゴリズム、および、予め計算されたデータセットの線形結合の何れかを利用する、
ことを特徴とする請求項8から11の何れか1項に記載の方法。
【請求項14】
永久磁石、単軸磁化を有する永久磁石、多極磁化を有する磁石、強磁性体、常磁性体、反磁性体、磁歪体および/または超伝導体および/または磁性反応の他の形態を有する材料、電磁石、磁性アセンブリ、溶接、スポット溶接、プロジェクション溶接、他の抵抗溶接、レーザ溶接、電子ビーム溶接およびアーク溶接の何れかの検査および/または品質管理のための、請求項8から13の何れか1項に記載の装置の使用。
【請求項15】
磁性システムの入力パラメータの初期化された組に基づいて上記磁性システムを特徴付けるためのコンピュータプログラムであって、処理エンジンにて実行されるときに、磁界分布の測定と、上記磁性システムの最適期待磁界分布の決定とを行うように適合されたコードセグメントを含んでいる、ことを特徴とするコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−185155(P2012−185155A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−28254(P2012−28254)
【出願日】平成24年2月13日(2012.2.13)
【出願人】(512036225)マグカム ナムローゼ フェンノートシャップ (1)
【氏名又は名称原語表記】MagCam NV
【住所又は居所原語表記】Romeinse straat 18,B−3001 Heverlee,Belgium
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2012−28254(P2012−28254)
【出願日】平成24年2月13日(2012.2.13)
【出願人】(512036225)マグカム ナムローゼ フェンノートシャップ (1)
【氏名又は名称原語表記】MagCam NV
【住所又は居所原語表記】Romeinse straat 18,B−3001 Heverlee,Belgium
【Fターム(参考)】
[ Back to top ]