
磁性微粒子イメージング装置およびコイル配設方法
【課題】MPI装置において、装置全体の大きさを小型化する。
【解決手段】円筒状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動する3対のゼロ磁場領域移動コイル13x、13yおよび13z、ならびに、ゼロ磁場領域11を発生させる1対の静磁場発生コイル12が、撮影領域を巻装するようにそれぞれ配設する。また、ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域の中心に幾何学的中心が一致するように配設する。
【解決手段】円筒状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動する3対のゼロ磁場領域移動コイル13x、13yおよび13z、ならびに、ゼロ磁場領域11を発生させる1対の静磁場発生コイル12が、撮影領域を巻装するようにそれぞれ配設する。また、ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域の中心に幾何学的中心が一致するように配設する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置およびコイル配設方法に関し、特に、磁性微粒子イメージング装置を小型化するための技術に関する。
【背景技術】
【0002】
近年、表面が化学修飾された磁性ナノ粒子(磁性微粒子)を被検体に投与した場合に、その磁性ナノ粒子がEPR(Enhanced Permeability and Retention)効果によって被検体の腫瘍およびその近傍に取り込まれることを利用して腫瘍の3次元部分布を画像化する磁性微粒子イメージング装置(以下、「MPI(Magnetic Particle Imaging)装置」と呼ぶ。)が考案されている(たとえば、非特許文献1参照。)。
【0003】
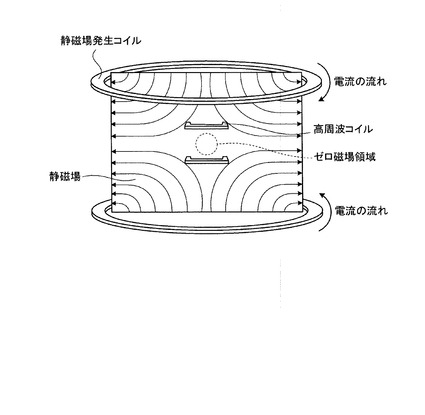
図13および14は、従来のMPI装置を説明するための図(1)および(2)である。図13に示すように、MPI装置は、まず、1対のコイルから構成された静磁場発生コイルによる反発磁場を利用してゼロ磁場領域を発生させ、そのうえで、高周波コイルを用いて、ゼロ磁場領域に対して交番磁場を印加する。
【0004】
ゼロ磁場領域中に磁性ナノ粒子が存在していた場合、十分強力な交番磁場が印加されると、磁性ナノ粒子の状態が磁気未飽和状態と飽和状態との間で状態が変化する。そのため、ゼロ磁場領域から奇数次の高調波信号が観測される。他方、ゼロ磁場領域外に磁性ナノ粒子が存在していた場合、その磁性ナノ粒子自体はすでに磁気飽和しているため、高調波信号はほとんど観測されない。この現象を利用すれば、ゼロ磁場領域を3次元的に走査させることによって磁性ナノ粒子の3次元分布を画像化できることになる。
【0005】
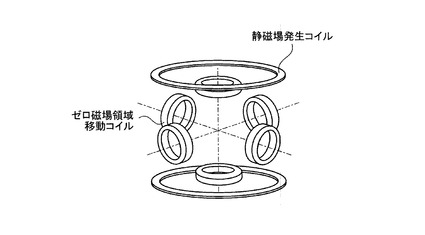
そこで、MPI装置は、図14に示すように、3対のゼロ磁場領域移動コイルと呼ばれるコイルを用いてゼロ磁場領域を3次元的に走査させ、これにより発生する高調波信号を検出して磁性ナノ粒子の3次元分布を画像化する。ここで、MPI装置では、ゼロ磁場領域移動コイルを用いてゼロ磁場領域を3次元方向へ移動する際には、ゼロ磁場領域のシフト量の制御をできるだけ簡単にするために「均一な磁場を発生させること」を前提としている。
【0006】
そのため、ゼロ磁場領域移動コイルとしては、構造が単純なわりに均一性がよい磁場を発生させることが可能な「ヘルムホルツコイル」が選択される。ヘルムホルツコイルは、同心円の2つのループコイルから構成されるコイルである。このヘルムホルツコイルを選択した場合、ゼロ磁場領域移動コイルに流れる電流とゼロ磁場シフト距離の関係はほぼ線形関係になるため、駆動制御という観点からみた場合に有利である。
【0007】
【非特許文献1】Gleich B, Weizenecker J, “ Tomographic Imaging using the Nonlinear Response of Magnetic Particles.”, Nature 2005; 435 (Letters):1214-1217
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、ヘルムホルツコイルには、「ループコイルの半径がループコイル間の距離に等しい」という配置条件がある。そのため、この条件を踏襲しようとすると、3対のゼロ磁場領域移動コイルを入れ子にして配置せざるを得ず、結果的に装置全体が大きくなってしまうという問題がある。
【0009】
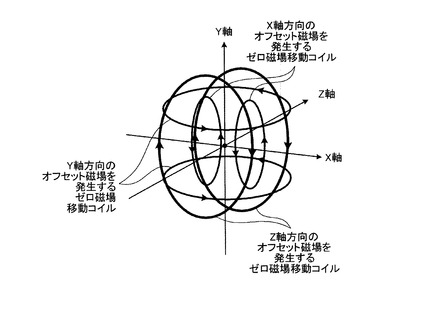
図15は、従来のMPI装置における問題点を説明するための図である。たとえば、同図に示すように、X軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルの外側にY軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルを配置し、さらにその外側にZ軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルを配置する場合を考える。
【0010】
この場合、被検体が人体であることを想定して、X軸方向用のゼロ磁場領域移動コイルにおけるループコイル間の距離を80cmとすると、各ループコイルの直径はその2倍の160cmとなる。すると、Y軸方向用のゼロ磁場領域移動コイルについては、ループコイル間の距離は160cm以上となり、各ループコイルの直径は320cm以上となる。
【0011】
さらに、Z軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルについては、ループコイル間の距離は320cm以上となり、各ループコイルの直径は640cm以上となる。このように、ヘルムホルツコイルを用いた場合には、3対のゼロ磁場領域移動コイルを含む装置全体の大きさが非常に大きくなってしまう。
【0012】
一般に、コイルをk倍に大きくして同じ駆動電流を流した場合、コイルによって発生する中心磁場強度は1/k倍となる。そのため、コイルが大型化した場合には、磁場の発生効率が低下してしまうという問題も生じる。
【0013】
この発明は、上述した従来技術による問題点を解消するためになされたものであり、装置全体の大きさを小型化することができるMPI装置およびコイル配設方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するため、請求項1記載の本発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置であって、前記ゼロ磁場領域を発生させる静磁場発生コイルと、円筒形状に形成された撮影領域を巻装するようにそれぞれ配設され、前記撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルと、を備えたことを特徴とする。
【0015】
また、請求項8記載の本発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置で用いられるコイル配設方法であって、円筒形状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルを、前記撮影領域を巻装するようにそれぞれ配設するステップを含んだことを特徴とする。
【発明の効果】
【0016】
請求項1または8記載の本発明によれば、装置全体の大きさを小型化することができるという効果を奏する。
【発明を実施するための最良の形態】
【0017】
以下に添付図面を参照して、この発明に係るMPI装置およびコイル配設方法の好適な実施例を詳細に説明する。なお、以下に示す実施例では、被検体が仰向け状態で撮影されることを前提とし、横置きタイプのMRI装置と同様に、撮影領域が円筒形状に形成されている場合について説明する。
【実施例1】
【0018】
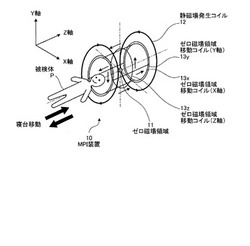
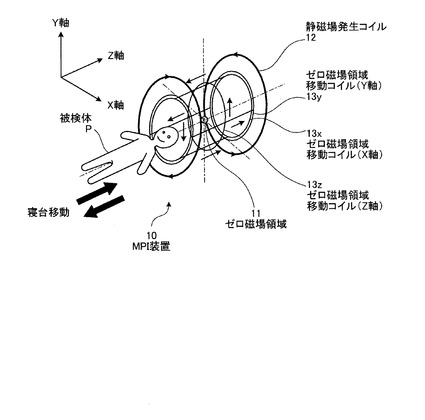
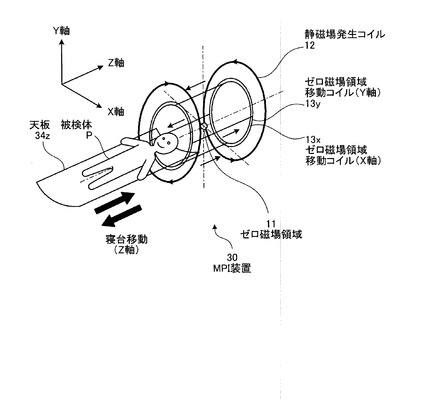
まず、本実施例1に係るMPI装置の構成について説明する。図1は、本実施例1に係るMPI装置の構成を示す構成図である。同図に示すように、このMPI装置10は、ゼロ磁場領域11を発生させる静磁場発生コイル12と、X軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13xと、Y軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13yと、Z軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13zとを有する。
【0019】
なお、ここでは図示を省略しているが、このMPI装置10は、ゼロ磁場領域に対して交番磁場を印加するとともに、磁性ナノ粒子から発せられる高周波信号を検出するための高周波コイルや、各種コイルが配設されるとともに、円筒形状に形成された撮影領域を有する架台部や、被検体が載置された天板を撮影領域の内外へ移動する寝台部や、各種コイルの駆動を制御するとともに、高周波コイルにより検出された高周波信号基づいて被検体内における磁性微粒子の分布を画像化する画像処理部なども有している。
【0020】
また、同図に示すように、ここでは、撮影領域に対する被検体の移動方向を基準として、左右、上下、前後の方向をそれぞれX軸、Y軸、Z軸方向として定義している。
【0021】
静磁場発生コイル12は、高温超電導ケーブルを用いた大型のヘルムホルツコイルであり、円筒形状に形成された撮影領域を巻装するように配設されている。この静磁場発生コイル12(ヘルムホルツコイル)を構成する2つのループコイルには、互いに逆向きとなるように電流が流される。これにより、各ループコイルから互いに反発する磁場が発生し、ループコイル間にゼロ磁場領域が発生する。
【0022】
なお、同図においては、静磁場発生コイル12として、撮影領域を挟んで上下にループコイルを配設した場合を示しているが、これらループコイルは、撮影領域を挟んで対象となる位置に配設されていれば、どのような位置に配設されていてもよい(たとえば、左右または前後など。)。
【0023】
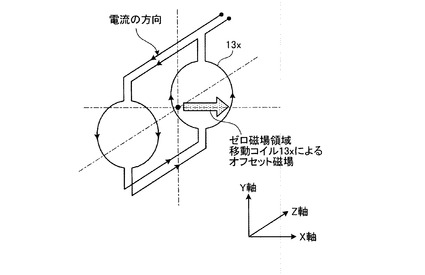
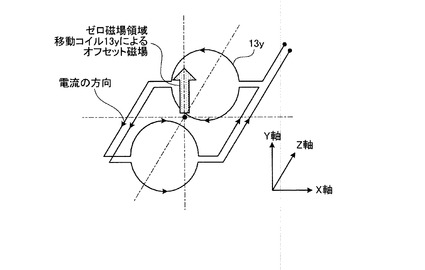
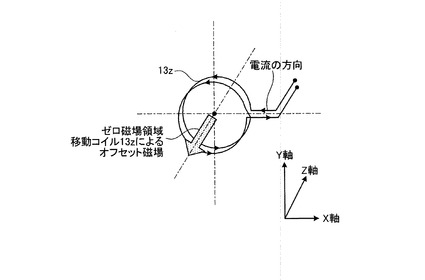
ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ所定の巻き数のループコイルである。図2は、本実施例1に係るX軸方向用のゼロ磁場領域移動コイル13xを示す図であり、図3は、本実施例1に係るY軸方向用のゼロ磁場領域移動コイル13yを示す図であり、図4は、本実施例1に係るZ軸方向用のゼロ磁場領域移動コイル13zを示す図である。
【0024】
図2、3および4に示すように、これらゼロ磁場領域移動コイル13x、13yおよび13zは、円筒形状に形成された撮影領域を巻装するように配設されている。また、各ゼロ磁場領域移動コイルは、すべてのゼロ磁場領域移動コイルに電流が流れていない状態で静磁場発生コイル12により発生するゼロ磁場領域11の中心(以下、「ゼロ磁場領域11の原点」と呼ぶ)に、コイルの幾何学的中心が一致するようにそれぞれ配設されている。
【0025】
このように、ゼロ磁場領域移動コイル13x、13yおよび13zを配設することにより、各ゼロ磁場領域移動コイルが入れ子にならずに円筒形状の撮影領域の周囲に効率よくまとめて配置され、ゼロ磁場領域移動コイルを含む装置全体がコンパクトになる。
【0026】
そして、これらゼロ磁場領域移動コイル13x、13yおよび13zに電流を流すことによって、図2、3および4に示すように、太い矢印で示す方向の磁場が発生する。これらの磁場によるゼロ磁場領域11の原点近傍での磁力線の流れを考えれば、各ゼロ磁場領域移動コイルによって、3次元方向にゼロ磁場をシフトできることがわかる。
【0027】
なお、図2および図3に示すゼロ磁場領域移動コイル13xおよびゼロ磁場領域移動コイル13yの円弧部分は、それぞれ、円筒形状に形成された撮影領域に被検体を導入するための開口部を与えるものである。これら円弧部分のコイルは、電流の流れる向きおよびその配置から、ゼロ磁場領域の原点近傍では殆ど不要な磁場を発生しない。
【0028】
また、図4に示すように、ゼロ磁場領域移動コイル13zは、単純なループコイルの形状となっている。さらに、幾何学的対称性から、ゼロ磁場領域移動コイル13x、13yおよび13zと静磁場発生コイル12との間には磁気的結合が生じない構造となっている。
【0029】
上述してきたように、本実施例1では、撮影領域内でゼロ磁場領域を三次元方向に移動する3対のゼロ磁場領域移動コイル13x、13yおよび13zが、円筒形状に形成された撮影領域を巻装するようにそれぞれ配設されることとしたので、各ゼロ磁場領域移動コイルを、入れ子にすることなく円筒形状の撮影領域の周囲に効率よくまとめて配置することが可能になり、装置全体の大きさを小型化することができる。
【0030】
また、本実施例1では、静磁場発生コイル12についても、撮影領域を巻装するように配設されていることとしたので、ゼロ磁場領域移動コイル13x、13yおよび13zを内包するように静磁場発生コイル12を配設することが可能になり、装置全体の大きさをさらに小型化することができる。
【0031】
また、本実施例1では、ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域11の中心に幾何学的中心が一致するように配設されたループコイルであることとしたので、原点を中心に、X軸、Y軸、Z軸ごとに正負の方向へ精度よくゼロ磁場領域11を移動することができる。
【実施例2】
【0032】
ところで、上記実施例1では、ゼロ磁場領域移動コイルとしてループコイルを用いた場合について説明したが、本発明はこれに限られるものではなく、たとえば、サドルコイルを用いてもよい。一般的に、サドルコイルは、MRI(Magnetic Resonance Imaging)装置におけるRF(Radio Frequency)コイルのエレメント形状としてよく知られた形状のコイルであり、構造上、ループコイルと比べて均一性の高い磁場を発生することができる。
【0033】
そこで、以下では、ゼロ磁場領域移動コイルとしてサドルコイルを用いるようにした場合を実施例2として説明する。なお、本実施例2に係るMPI装置は、基本的には図1に示したMPI装置10と同様の構成を有するものであり、ゼロ磁場領域移動コイルの種類が異なるのみであるので、ここでは、3対のゼロ磁場領域移動コイルについてのみ説明する。
【0034】
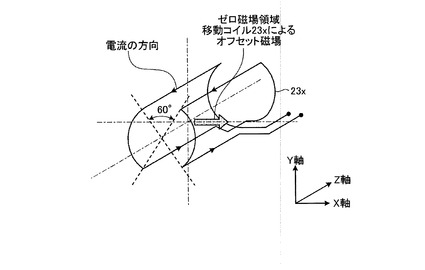
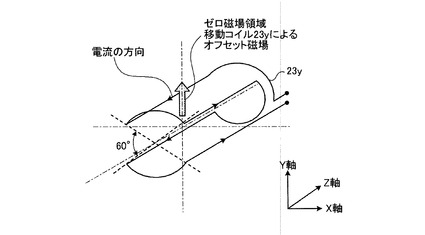
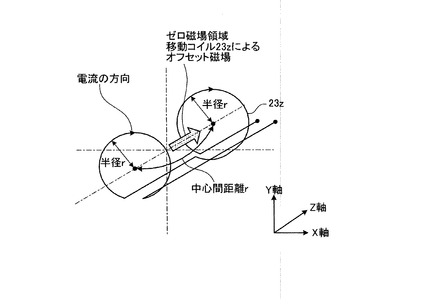
図5は、本実施例2に係るX軸方向用のゼロ磁場領域移動コイル23xを示す図であり、図6は、本実施例2に係るY軸方向用のゼロ磁場領域移動コイル23yを示す図であり、図7は、本実施例2に係るZ軸方向用のゼロ磁場領域移動コイル23zを示す図である。
【0035】
図5および図6に示すように、ゼロ磁場領域移動コイル23xおよびゼロ磁場領域移動コイル23yは、それぞれ、円筒状に形成された撮影領域の側面に沿って湾曲するように形成されたサドルコイルであり、実施例1と同様に、コイルの幾何学的中心が、ゼロ磁場領域11の原点に一致するようにそれぞれ配設されている。
【0036】
また、本実施例2では、図7に示すように、Z軸方向用のゼロ磁場領域移動コイル23zとしては、ループコイルの半径およびループコイル間の距離がともにrであるヘルムホルツコイルを用いている。
【0037】
そして、これらゼロ磁場領域移動コイル23x、23yおよび23zに電流を流すことによって、図5、6および7に示すように、太い矢印で示す方向の磁場が発生する。これらの磁場によるゼロ磁場領域11の原点近傍での磁力線の流れを考えれば、実施例1と同様に、各ゼロ磁場領域移動コイルによって、3次元方向にゼロ磁場をシフトできることがわかる。
【0038】
なお、本実施例2においても、実施例1と同様に、幾何学的対称性から、3対のゼロ磁場領域移動コイル23x、23yおよび23zと静磁場発生コイル12との間には磁気的結合が生じない構造となっている。
【0039】
上述してきたように、本実施例2では、3対のゼロ磁場領域移動コイル23x、23yおよび23zは、被検体の体軸方向にゼロ磁場領域11を移動する1対のヘルムホルツコイルと、それぞれ撮影領域の側面に沿って湾曲するように形成され、他の2次元の方向にゼロ磁場領域を移動する2つのサドルコイルとから構成されることとしたので、装置を小型化することができるとともに、オフセット磁場の均一性をより改善することができる。
【実施例3】
【0040】
ところで、上記実施例1および2では、ともに3対のゼロ磁場領域移動コイルを備えたMPI装置について説明したが、本発明はこれに限られるものではなく、被検体の体軸方向へのゼロ磁場領域の移動については、Z軸方向用のゼロ磁場領域移動コイルを用いるのではなく、被検体が載置される天板を体軸方向に移動することによって相対的にゼロ磁場領域を移動するようにしてもよい。
【0041】
そこで、以下では、実施例1で説明したMPI装置において、Z軸方向へのゼロ磁場領域の移動を、Z軸方向用のゼロ磁場領域移動コイルの代わりに天板を用いて行うようにした場合を実施例3として説明する。図8は、本実施例3に係るMPI装置の構成を示す構成図である。なお、ここでは説明の便宜上、図1に示した各部と同様の役割を果たす機能部については、同一符号を付すこととしてその詳細な説明を省略する。
【0042】
同図に示すように、本実施例3に係るMPI装置30は、ゼロ磁場領域11を発生させる静磁場発生コイル12と、X軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13xと、Y軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13yと、被検体PをZ軸方向に移動する天板34zとを有する。
【0043】
天板34zは、図示していない寝台部によって電気的に駆動される。天板34zが被検体PをZ軸方向に移動することによって、被検体Pを基準とした場合に、Z軸方向へ相対的にゼロ磁場領域を移動することができる。なお、天板34zの移動はできるだけ遅い動きであるほうが患者である被検体Pにとってのメリットがあるため、XY平面で全ての走査が完了した後に天板34zをZ軸方向へ移動する動作を繰り返すのが望ましい。
【0044】
このように、本実施例3では、3対のゼロ磁場領域移動コイル13x、13yおよび13zのうち、被検体Pの体軸方向にゼロ磁場領域を移動するゼロ磁場領域移動コイル13zに代えて、天板34zが、ゼロ磁場領域に対して被検体Pを体軸方向に移動することによって相対的にゼロ磁場領域を移動するので、Z軸方向用のゼロ磁場領域移動コイル13z、および、当該ゼロ磁場領域移動コイル13zに電流を流すための駆動アンプを省略することが可能になり、装置をさらに小型化することができる。
【0045】
なお、上記実施例1、2および3では、3つまたは2つのゼロ磁場領域移動コイルを備えた場合について説明したが、いずれかひとつのゼロ磁場領域移動コイルの役割を静磁場発生コイルが兼ねるようにしてもよい。その場合、静磁場を発生させるための直流電流と、ゼロ磁場領域を移動するための交流電流とを重畳した電流を静磁場発生コイルに流すように電流供給を制御する。これにより、3つまたは2つのゼロ磁場領域移動コイルのうちいずれかひとつを省略することが可能になり、さらに装置を小型化することが可能になる。
【0046】
また、これまでに説明した実施例では、全体的に、ゼロ磁場領域移動コイルが発生する磁場の均一性の優先順位を下げ、電流の利用効率を上げるという方法を採用した。ここで優先順位を下げた磁場の不均一性については、あらかじめ実測(または計算)された校正データから逆演算して制御入力値を計算するといった方法でカバーすることが可能である。
【0047】
図9は、ゼロ磁場領域移動コイルにより発生する磁場とゼロ磁場領域のシフト量との関係を示す図である。たとえば、同図に示すように、あらかじめ校正データとして、ゼロ磁場領域移動コイルにより発生する磁場に対するゼロ磁場領域のシフト量の関係を定義しておき、ゼロ磁場領域をシフトする際には、そのシフト量に応じて任意のゼロ磁場領域の位置から逆演算で駆動電流値を特定し、特定した駆動電流値をゼロ磁場領域移動コイルに供給するようにしておく。
【0048】
以上、本発明に係るMPI装置およびコイル配設方法の実施例について説明したが、以降では、これまでに説明した実施例について、実用的な時間、実用的空間分解能を満たしつつ、所望のサイズの領域を撮影できるかどうかを具体的に検討する。
【0049】
まず、MPI装置における関心領域のサイズを256(W)×256(D)×256(H)[mm3]の立方体領域とし、空間分解能を1(W)×1(D)×1(H)[mm3]と仮定する。さらに、説明を分かりやすくするために、静磁場発生コイルが発生する磁場勾配XS[A/m2]は一定であると仮定し、ゼロ磁場領域移動コイルが発生する磁場も均一(一定)であると仮定する。
【0050】
前出の非特許文献1によれば、直径30[nm]の磁性ナノ粒子の飽和外部磁場はHK=0.5×10−3・μ0−1[A/m]となる(μ0は真空の透磁率を表し、その値は4π×10−7[H/m]である。)。このことから、空間分解能はR=2HK/XSと表される。ここで、空間分解能の1辺は1[mm]と仮定していたので、これを前式に代入して解くと、静磁場発生コイルが発生する磁場勾配としては、XS=1・μ0−1[A/m2]が必要であることが分かる。
【0051】
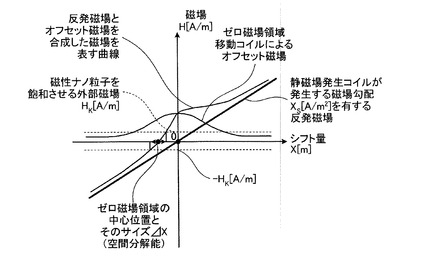
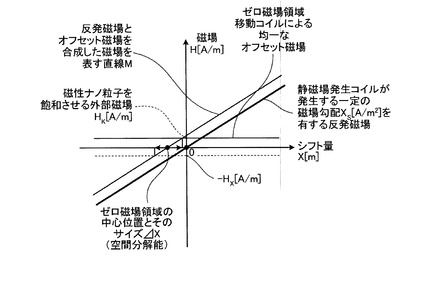
図10は、静磁場発生コイルが発生する磁場勾配XSを一定とした場合のゼロ磁場領域移動コイルが発生するオフセット磁場とゼロ磁場領域との関係を示す図である。同図に示すように、関心領域である1辺が256[mm]の領域をカバーするためには、ゼロ磁場の範囲(同図では、静磁場発生コイルが発生する磁場勾配XSにゼロ磁場領域移動コイルによるオフセット磁場を重畳した磁場を表す直線MがX軸と交差する点を中心とした範囲)が±0.128・μ0−1[A/m]でなければならないことが分かる。すなわち、静磁場発生コイルが発生する磁場勾配XSを一定とした場合、ゼロ磁場領域移動コイルは±0.128・μ0−1[A/m]だけのオフセット磁場を磁場勾配XSに対して重畳する必要がある。
【0052】
ところで、国際安全規格IEC60601−2−33で規定されている磁束密度の時間変動率(dB/dt)の制限から、被検体に印加される磁場の磁場密度は、磁場の印加時間が連続の場合には20[T/s]以下でなければならないとされている。すなわち、磁場の印加時間は0.128×2/20=0.0128[s]となる。そのため、たとえばX軸(またはY軸)方向に1ライン分だけゼロ磁場領域を走査する場合には、0.0128[s]以上の時間をかけなければならないことになる。
【0053】
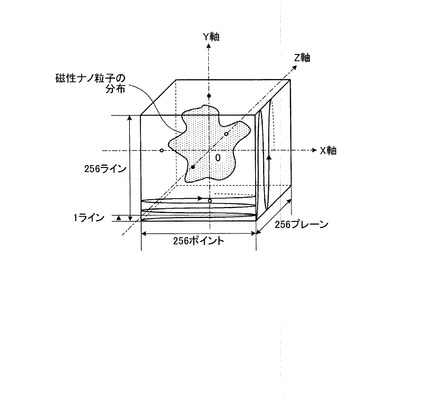
図11は、関心領域でのゼロ磁場領域の走査を示す図である。実際には、同図に示すように、MPI装置は、ゼロ磁場領域移動コイルを制御することによって、X軸方向(またはY軸方向)へゼロ磁場領域の走査を繰り返しながら(総回数=256)、これと直交するY軸方向(またはX軸方向)にも走査する。
【0054】
そのため、1面を走査し終わるために必要な時間は0.0128×256=3.2768[s]となる。さらに、1面毎の走査を256回繰り返しながらZ軸方向へ走査することによって全関心領域を走査することになるので、総走査時間は3.2768×256=838.8608[s]≒14[min]となる。
【0055】
臨床への応用を考えた場合でも、この程度の時間であれば十分に実用的であると言える。約14分間でZ軸方向の走査をすればよいことから、実施例3で説明した寝台移動によるZ軸方向の走査は被検体に負担をかけることなく実現可能であることが分かる。
【0056】
また、イメージングのために1点の測定に使える時間は0.0128×2/256=1×10−4[s]=100[μs]と計算される。さらに、人体に高周波磁界を印加する場合は人体の導電率と渦電流の影響を考えて、100[kHz]前後(周期10[μs])に設定されることが多い。これらの理由から、ゼロ磁場の移動による「ボケ」の影響を無視できるならば、1点につき最大10周期分のデータを収集できることになり、十分な精度で磁性ナノ粒子の分布を測定できることが分かる。
【0057】
次に、実施例1で示した図4を例に挙げて、現実的な範囲内で電気的にゼロ磁場を移動できるかを吟味してみる。図2および3のコイルについては、開口面積をほぼ同程度となるように設計しておけば、印加電流に対する発生磁場や自己インダクタンスもほぼ同程度となることから、図4のコイルに対して検討すれば十分である。
【0058】
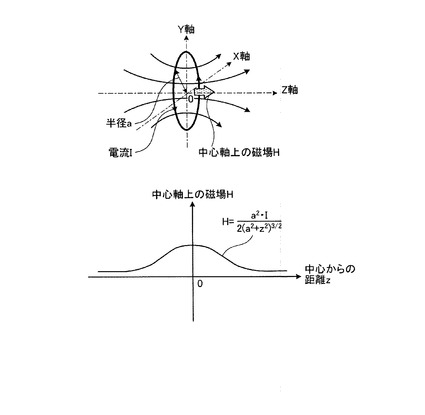
ここで、図4に示したコイルは、単純な「円形コイル」とみなすことができる。図12は、円形コイルにより発生する磁場を示す図である。同図に示すように、コイルに流れる電流をI[A]、コイルの半径をa[m]とすると、コイルの中心軸上で中心からz[m]離れた位置での磁場H[A/m]は以下の式で表される。
【数1】

【0059】
この式から、a=0.5[m]、z=0[m]としてH=0.128・μ0−1[A/m]を満足するためには、電流としてI=2a×0.128・μ0−1=1.02×105[A]を流す必要があることが分かる。
【0060】
また、コイルの巻き数N、長さl[m]、半径a[m]、真空の透磁率μ0[H/m]とすると、自己インダクタンスLは以下の式で表される。
【数2】
【0061】
さらに、長さlが半径と比べて十分短いと仮定できる場合(l<<aに相当。)には、自己インダクタンスLは以下の式で近似することができる。
L=(μ0・N2・π・a)/2[H]
【0062】
これらの式から、たとえばコイルの巻数をN=200[turn]とすれば、I=510[A]、自己インダクタンスL=0.0789[H]となり、コイルの抵抗損が無視できる場合、印加すべき電圧E[V]はE=L・(dI/dt)=0.0789×510/0.0128=3,145[V]と求めることができる。
【0063】
これは、周波数39.1[Hz](周期T=0.0128×2=0.0256[s]に対応。)にて最大電圧3,145[V]、最大電流510[A]を印加することができれば、このコイルを十分駆動することが可能であることを示している。そして、これらコイルの性能は、現在製品に搭載されているMRI装置用傾斜磁場電源の性能と比較すれば、十分に実現可能であることが分かる。
【0064】
ところで、すでに説明したように、実用可能なMPI装置を得るためには、510[A]、39.1[HZ]の交流電流を約14分間連続で流し続ける必要性があることから、ゼロ磁場領域移動コイルの抵抗値をゼロに近くすることができれば抵抗損による発熱がほとんど無視することができ、実用上非常に有利になる。
【0065】
2006年11月1日付けの国際超電導産業技術センター(ISTEC)の発表によれば、イットリウム系高温超電導ケーブル(導体径20mm)600[Arms](商用周波数)を用いた場合に、交流損失を0.004[W/m]以下に抑えることができると報告されている(「超電導コイル エネルギー損失1/3 ISTEC変圧器など応用期待」,日経産業新聞,2006年11月1日、「ソリューション21」,日工フォーラム,2006年9月号,34ページ)。
【0066】
これは、コイルの半径a=0.5[m]、巻き数N=200[turn]とすれば、トータルの交流損失が2.51[W]以下になることを意味しており、十分実用的なレベルに達していることを示唆している。
【0067】
また、前述したように、ゼロ磁場領域の大きさ(画像分解能に関連)を維持しながら3次元走査範囲を拡大するには、ゼロ磁場領域移動コイルにより発生する磁場が十分強力でなければならない。そのためには、ゼロ磁場領域移動コイルに大電流を流す必要があるが、各ゼロ磁場領域移動コイルに通常の銅線を使ったのでは、抵抗損によるエネルギー損が非常に大きくなるため、強力な冷却装置が必要になるなどの問題がある。
【0068】
イットリウム系超電導ケーブルは、交流電流を流してもエネルギー損失がそれ程大きくならず、かつ、液体窒素温度で高温超電導状態となるので、このイットリウム系超電導ケーブルをゼロ磁場領域移動コイルとしてこれによって所望の画像分解能と撮影視野を確保したままで、ランニングコスト(=電力損失と冷却損失)を下げることができる。
【0069】
以上の理由から、本発明のゼロ磁場領域移動コイルは、交流電流を流してもエネルギー損失がそれほど大きくならず、かつ、液体窒素で超電導状態を示すイットリウム系超電導ケーブルで構成しておくことが望ましい。これにより、所望の画像分解能と撮影視野を確保したままで、ランニングコスト(=電力損失と冷却損失)を下げることができる。
【0070】
さらに、ゼロ磁場領域移動コイルだけでなく静磁場発生コイルもこれで実現する方が冷却コストの面からも有利であり、かつ、電流値や電流方向を簡単に変更できるという利点も生じる。
【産業上の利用可能性】
【0071】
以上のように、本発明に係る磁性微粒子イメージング装置およびコイル配設方法は、装置を小型化することが求められる場合に有用であり、特に、撮影領域が円筒形状に形成されている場合に適している。
【図面の簡単な説明】
【0072】
【図1】本実施例1に係るMPI装置の構成を示す構成図である。
【図2】本実施例1に係るX軸方向用のゼロ磁場領域移動コイルを示す図である。
【図3】本実施例1に係るY軸方向用のゼロ磁場領域移動コイルを示す図である。
【図4】本実施例1に係るZ軸方向用のゼロ磁場領域移動コイルを示す図である。
【図5】本実施例2に係るX軸方向用のゼロ磁場領域移動コイルを示す図である。
【図6】本実施例2に係るY軸方向用のゼロ磁場領域移動コイルを示す図である。
【図7】本実施例2に係るZ軸方向用のゼロ磁場領域移動コイルを示す図である。
【図8】本実施例3に係るMPI装置の構成を示す構成図である。
【図9】ゼロ磁場領域移動コイルにより発生する磁場とゼロ磁場領域のシフト量との関係を示す図である。
【図10】静磁場発生コイルが発生する磁場勾配を一定とした場合のゼロ磁場領域移動コイルが発生するオフセット磁場とゼロ磁場領域との関係を示す図である。
【図11】関心領域でのゼロ磁場領域の走査を示す図である。
【図12】円形コイルにより発生する磁場を示す図である。
【図13】従来のMPI装置を説明するための図(1)である。
【図14】従来のMPI装置を説明するための図(2)である。
【図15】従来のMPI装置における問題点を説明するための図である。
【符号の説明】
【0073】
10,30 MPI装置
11 ゼロ磁場領域
12 静磁場発生コイル
13x,13y,13z,23x,23y,23z ゼロ磁場領域移動コイル
34z 天板
【技術分野】
【0001】
この発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置およびコイル配設方法に関し、特に、磁性微粒子イメージング装置を小型化するための技術に関する。
【背景技術】
【0002】
近年、表面が化学修飾された磁性ナノ粒子(磁性微粒子)を被検体に投与した場合に、その磁性ナノ粒子がEPR(Enhanced Permeability and Retention)効果によって被検体の腫瘍およびその近傍に取り込まれることを利用して腫瘍の3次元部分布を画像化する磁性微粒子イメージング装置(以下、「MPI(Magnetic Particle Imaging)装置」と呼ぶ。)が考案されている(たとえば、非特許文献1参照。)。
【0003】
図13および14は、従来のMPI装置を説明するための図(1)および(2)である。図13に示すように、MPI装置は、まず、1対のコイルから構成された静磁場発生コイルによる反発磁場を利用してゼロ磁場領域を発生させ、そのうえで、高周波コイルを用いて、ゼロ磁場領域に対して交番磁場を印加する。
【0004】
ゼロ磁場領域中に磁性ナノ粒子が存在していた場合、十分強力な交番磁場が印加されると、磁性ナノ粒子の状態が磁気未飽和状態と飽和状態との間で状態が変化する。そのため、ゼロ磁場領域から奇数次の高調波信号が観測される。他方、ゼロ磁場領域外に磁性ナノ粒子が存在していた場合、その磁性ナノ粒子自体はすでに磁気飽和しているため、高調波信号はほとんど観測されない。この現象を利用すれば、ゼロ磁場領域を3次元的に走査させることによって磁性ナノ粒子の3次元分布を画像化できることになる。
【0005】
そこで、MPI装置は、図14に示すように、3対のゼロ磁場領域移動コイルと呼ばれるコイルを用いてゼロ磁場領域を3次元的に走査させ、これにより発生する高調波信号を検出して磁性ナノ粒子の3次元分布を画像化する。ここで、MPI装置では、ゼロ磁場領域移動コイルを用いてゼロ磁場領域を3次元方向へ移動する際には、ゼロ磁場領域のシフト量の制御をできるだけ簡単にするために「均一な磁場を発生させること」を前提としている。
【0006】
そのため、ゼロ磁場領域移動コイルとしては、構造が単純なわりに均一性がよい磁場を発生させることが可能な「ヘルムホルツコイル」が選択される。ヘルムホルツコイルは、同心円の2つのループコイルから構成されるコイルである。このヘルムホルツコイルを選択した場合、ゼロ磁場領域移動コイルに流れる電流とゼロ磁場シフト距離の関係はほぼ線形関係になるため、駆動制御という観点からみた場合に有利である。
【0007】
【非特許文献1】Gleich B, Weizenecker J, “ Tomographic Imaging using the Nonlinear Response of Magnetic Particles.”, Nature 2005; 435 (Letters):1214-1217
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、ヘルムホルツコイルには、「ループコイルの半径がループコイル間の距離に等しい」という配置条件がある。そのため、この条件を踏襲しようとすると、3対のゼロ磁場領域移動コイルを入れ子にして配置せざるを得ず、結果的に装置全体が大きくなってしまうという問題がある。
【0009】
図15は、従来のMPI装置における問題点を説明するための図である。たとえば、同図に示すように、X軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルの外側にY軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルを配置し、さらにその外側にZ軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルを配置する場合を考える。
【0010】
この場合、被検体が人体であることを想定して、X軸方向用のゼロ磁場領域移動コイルにおけるループコイル間の距離を80cmとすると、各ループコイルの直径はその2倍の160cmとなる。すると、Y軸方向用のゼロ磁場領域移動コイルについては、ループコイル間の距離は160cm以上となり、各ループコイルの直径は320cm以上となる。
【0011】
さらに、Z軸方向のオフセット磁場を発生するゼロ磁場領域移動コイルについては、ループコイル間の距離は320cm以上となり、各ループコイルの直径は640cm以上となる。このように、ヘルムホルツコイルを用いた場合には、3対のゼロ磁場領域移動コイルを含む装置全体の大きさが非常に大きくなってしまう。
【0012】
一般に、コイルをk倍に大きくして同じ駆動電流を流した場合、コイルによって発生する中心磁場強度は1/k倍となる。そのため、コイルが大型化した場合には、磁場の発生効率が低下してしまうという問題も生じる。
【0013】
この発明は、上述した従来技術による問題点を解消するためになされたものであり、装置全体の大きさを小型化することができるMPI装置およびコイル配設方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するため、請求項1記載の本発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置であって、前記ゼロ磁場領域を発生させる静磁場発生コイルと、円筒形状に形成された撮影領域を巻装するようにそれぞれ配設され、前記撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルと、を備えたことを特徴とする。
【0015】
また、請求項8記載の本発明は、ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置で用いられるコイル配設方法であって、円筒形状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルを、前記撮影領域を巻装するようにそれぞれ配設するステップを含んだことを特徴とする。
【発明の効果】
【0016】
請求項1または8記載の本発明によれば、装置全体の大きさを小型化することができるという効果を奏する。
【発明を実施するための最良の形態】
【0017】
以下に添付図面を参照して、この発明に係るMPI装置およびコイル配設方法の好適な実施例を詳細に説明する。なお、以下に示す実施例では、被検体が仰向け状態で撮影されることを前提とし、横置きタイプのMRI装置と同様に、撮影領域が円筒形状に形成されている場合について説明する。
【実施例1】
【0018】
まず、本実施例1に係るMPI装置の構成について説明する。図1は、本実施例1に係るMPI装置の構成を示す構成図である。同図に示すように、このMPI装置10は、ゼロ磁場領域11を発生させる静磁場発生コイル12と、X軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13xと、Y軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13yと、Z軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13zとを有する。
【0019】
なお、ここでは図示を省略しているが、このMPI装置10は、ゼロ磁場領域に対して交番磁場を印加するとともに、磁性ナノ粒子から発せられる高周波信号を検出するための高周波コイルや、各種コイルが配設されるとともに、円筒形状に形成された撮影領域を有する架台部や、被検体が載置された天板を撮影領域の内外へ移動する寝台部や、各種コイルの駆動を制御するとともに、高周波コイルにより検出された高周波信号基づいて被検体内における磁性微粒子の分布を画像化する画像処理部なども有している。
【0020】
また、同図に示すように、ここでは、撮影領域に対する被検体の移動方向を基準として、左右、上下、前後の方向をそれぞれX軸、Y軸、Z軸方向として定義している。
【0021】
静磁場発生コイル12は、高温超電導ケーブルを用いた大型のヘルムホルツコイルであり、円筒形状に形成された撮影領域を巻装するように配設されている。この静磁場発生コイル12(ヘルムホルツコイル)を構成する2つのループコイルには、互いに逆向きとなるように電流が流される。これにより、各ループコイルから互いに反発する磁場が発生し、ループコイル間にゼロ磁場領域が発生する。
【0022】
なお、同図においては、静磁場発生コイル12として、撮影領域を挟んで上下にループコイルを配設した場合を示しているが、これらループコイルは、撮影領域を挟んで対象となる位置に配設されていれば、どのような位置に配設されていてもよい(たとえば、左右または前後など。)。
【0023】
ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ所定の巻き数のループコイルである。図2は、本実施例1に係るX軸方向用のゼロ磁場領域移動コイル13xを示す図であり、図3は、本実施例1に係るY軸方向用のゼロ磁場領域移動コイル13yを示す図であり、図4は、本実施例1に係るZ軸方向用のゼロ磁場領域移動コイル13zを示す図である。
【0024】
図2、3および4に示すように、これらゼロ磁場領域移動コイル13x、13yおよび13zは、円筒形状に形成された撮影領域を巻装するように配設されている。また、各ゼロ磁場領域移動コイルは、すべてのゼロ磁場領域移動コイルに電流が流れていない状態で静磁場発生コイル12により発生するゼロ磁場領域11の中心(以下、「ゼロ磁場領域11の原点」と呼ぶ)に、コイルの幾何学的中心が一致するようにそれぞれ配設されている。
【0025】
このように、ゼロ磁場領域移動コイル13x、13yおよび13zを配設することにより、各ゼロ磁場領域移動コイルが入れ子にならずに円筒形状の撮影領域の周囲に効率よくまとめて配置され、ゼロ磁場領域移動コイルを含む装置全体がコンパクトになる。
【0026】
そして、これらゼロ磁場領域移動コイル13x、13yおよび13zに電流を流すことによって、図2、3および4に示すように、太い矢印で示す方向の磁場が発生する。これらの磁場によるゼロ磁場領域11の原点近傍での磁力線の流れを考えれば、各ゼロ磁場領域移動コイルによって、3次元方向にゼロ磁場をシフトできることがわかる。
【0027】
なお、図2および図3に示すゼロ磁場領域移動コイル13xおよびゼロ磁場領域移動コイル13yの円弧部分は、それぞれ、円筒形状に形成された撮影領域に被検体を導入するための開口部を与えるものである。これら円弧部分のコイルは、電流の流れる向きおよびその配置から、ゼロ磁場領域の原点近傍では殆ど不要な磁場を発生しない。
【0028】
また、図4に示すように、ゼロ磁場領域移動コイル13zは、単純なループコイルの形状となっている。さらに、幾何学的対称性から、ゼロ磁場領域移動コイル13x、13yおよび13zと静磁場発生コイル12との間には磁気的結合が生じない構造となっている。
【0029】
上述してきたように、本実施例1では、撮影領域内でゼロ磁場領域を三次元方向に移動する3対のゼロ磁場領域移動コイル13x、13yおよび13zが、円筒形状に形成された撮影領域を巻装するようにそれぞれ配設されることとしたので、各ゼロ磁場領域移動コイルを、入れ子にすることなく円筒形状の撮影領域の周囲に効率よくまとめて配置することが可能になり、装置全体の大きさを小型化することができる。
【0030】
また、本実施例1では、静磁場発生コイル12についても、撮影領域を巻装するように配設されていることとしたので、ゼロ磁場領域移動コイル13x、13yおよび13zを内包するように静磁場発生コイル12を配設することが可能になり、装置全体の大きさをさらに小型化することができる。
【0031】
また、本実施例1では、ゼロ磁場領域移動コイル13x、13yおよび13zは、それぞれ、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域11の中心に幾何学的中心が一致するように配設されたループコイルであることとしたので、原点を中心に、X軸、Y軸、Z軸ごとに正負の方向へ精度よくゼロ磁場領域11を移動することができる。
【実施例2】
【0032】
ところで、上記実施例1では、ゼロ磁場領域移動コイルとしてループコイルを用いた場合について説明したが、本発明はこれに限られるものではなく、たとえば、サドルコイルを用いてもよい。一般的に、サドルコイルは、MRI(Magnetic Resonance Imaging)装置におけるRF(Radio Frequency)コイルのエレメント形状としてよく知られた形状のコイルであり、構造上、ループコイルと比べて均一性の高い磁場を発生することができる。
【0033】
そこで、以下では、ゼロ磁場領域移動コイルとしてサドルコイルを用いるようにした場合を実施例2として説明する。なお、本実施例2に係るMPI装置は、基本的には図1に示したMPI装置10と同様の構成を有するものであり、ゼロ磁場領域移動コイルの種類が異なるのみであるので、ここでは、3対のゼロ磁場領域移動コイルについてのみ説明する。
【0034】
図5は、本実施例2に係るX軸方向用のゼロ磁場領域移動コイル23xを示す図であり、図6は、本実施例2に係るY軸方向用のゼロ磁場領域移動コイル23yを示す図であり、図7は、本実施例2に係るZ軸方向用のゼロ磁場領域移動コイル23zを示す図である。
【0035】
図5および図6に示すように、ゼロ磁場領域移動コイル23xおよびゼロ磁場領域移動コイル23yは、それぞれ、円筒状に形成された撮影領域の側面に沿って湾曲するように形成されたサドルコイルであり、実施例1と同様に、コイルの幾何学的中心が、ゼロ磁場領域11の原点に一致するようにそれぞれ配設されている。
【0036】
また、本実施例2では、図7に示すように、Z軸方向用のゼロ磁場領域移動コイル23zとしては、ループコイルの半径およびループコイル間の距離がともにrであるヘルムホルツコイルを用いている。
【0037】
そして、これらゼロ磁場領域移動コイル23x、23yおよび23zに電流を流すことによって、図5、6および7に示すように、太い矢印で示す方向の磁場が発生する。これらの磁場によるゼロ磁場領域11の原点近傍での磁力線の流れを考えれば、実施例1と同様に、各ゼロ磁場領域移動コイルによって、3次元方向にゼロ磁場をシフトできることがわかる。
【0038】
なお、本実施例2においても、実施例1と同様に、幾何学的対称性から、3対のゼロ磁場領域移動コイル23x、23yおよび23zと静磁場発生コイル12との間には磁気的結合が生じない構造となっている。
【0039】
上述してきたように、本実施例2では、3対のゼロ磁場領域移動コイル23x、23yおよび23zは、被検体の体軸方向にゼロ磁場領域11を移動する1対のヘルムホルツコイルと、それぞれ撮影領域の側面に沿って湾曲するように形成され、他の2次元の方向にゼロ磁場領域を移動する2つのサドルコイルとから構成されることとしたので、装置を小型化することができるとともに、オフセット磁場の均一性をより改善することができる。
【実施例3】
【0040】
ところで、上記実施例1および2では、ともに3対のゼロ磁場領域移動コイルを備えたMPI装置について説明したが、本発明はこれに限られるものではなく、被検体の体軸方向へのゼロ磁場領域の移動については、Z軸方向用のゼロ磁場領域移動コイルを用いるのではなく、被検体が載置される天板を体軸方向に移動することによって相対的にゼロ磁場領域を移動するようにしてもよい。
【0041】
そこで、以下では、実施例1で説明したMPI装置において、Z軸方向へのゼロ磁場領域の移動を、Z軸方向用のゼロ磁場領域移動コイルの代わりに天板を用いて行うようにした場合を実施例3として説明する。図8は、本実施例3に係るMPI装置の構成を示す構成図である。なお、ここでは説明の便宜上、図1に示した各部と同様の役割を果たす機能部については、同一符号を付すこととしてその詳細な説明を省略する。
【0042】
同図に示すように、本実施例3に係るMPI装置30は、ゼロ磁場領域11を発生させる静磁場発生コイル12と、X軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13xと、Y軸方向にゼロ磁場領域11を移動するゼロ磁場領域移動コイル13yと、被検体PをZ軸方向に移動する天板34zとを有する。
【0043】
天板34zは、図示していない寝台部によって電気的に駆動される。天板34zが被検体PをZ軸方向に移動することによって、被検体Pを基準とした場合に、Z軸方向へ相対的にゼロ磁場領域を移動することができる。なお、天板34zの移動はできるだけ遅い動きであるほうが患者である被検体Pにとってのメリットがあるため、XY平面で全ての走査が完了した後に天板34zをZ軸方向へ移動する動作を繰り返すのが望ましい。
【0044】
このように、本実施例3では、3対のゼロ磁場領域移動コイル13x、13yおよび13zのうち、被検体Pの体軸方向にゼロ磁場領域を移動するゼロ磁場領域移動コイル13zに代えて、天板34zが、ゼロ磁場領域に対して被検体Pを体軸方向に移動することによって相対的にゼロ磁場領域を移動するので、Z軸方向用のゼロ磁場領域移動コイル13z、および、当該ゼロ磁場領域移動コイル13zに電流を流すための駆動アンプを省略することが可能になり、装置をさらに小型化することができる。
【0045】
なお、上記実施例1、2および3では、3つまたは2つのゼロ磁場領域移動コイルを備えた場合について説明したが、いずれかひとつのゼロ磁場領域移動コイルの役割を静磁場発生コイルが兼ねるようにしてもよい。その場合、静磁場を発生させるための直流電流と、ゼロ磁場領域を移動するための交流電流とを重畳した電流を静磁場発生コイルに流すように電流供給を制御する。これにより、3つまたは2つのゼロ磁場領域移動コイルのうちいずれかひとつを省略することが可能になり、さらに装置を小型化することが可能になる。
【0046】
また、これまでに説明した実施例では、全体的に、ゼロ磁場領域移動コイルが発生する磁場の均一性の優先順位を下げ、電流の利用効率を上げるという方法を採用した。ここで優先順位を下げた磁場の不均一性については、あらかじめ実測(または計算)された校正データから逆演算して制御入力値を計算するといった方法でカバーすることが可能である。
【0047】
図9は、ゼロ磁場領域移動コイルにより発生する磁場とゼロ磁場領域のシフト量との関係を示す図である。たとえば、同図に示すように、あらかじめ校正データとして、ゼロ磁場領域移動コイルにより発生する磁場に対するゼロ磁場領域のシフト量の関係を定義しておき、ゼロ磁場領域をシフトする際には、そのシフト量に応じて任意のゼロ磁場領域の位置から逆演算で駆動電流値を特定し、特定した駆動電流値をゼロ磁場領域移動コイルに供給するようにしておく。
【0048】
以上、本発明に係るMPI装置およびコイル配設方法の実施例について説明したが、以降では、これまでに説明した実施例について、実用的な時間、実用的空間分解能を満たしつつ、所望のサイズの領域を撮影できるかどうかを具体的に検討する。
【0049】
まず、MPI装置における関心領域のサイズを256(W)×256(D)×256(H)[mm3]の立方体領域とし、空間分解能を1(W)×1(D)×1(H)[mm3]と仮定する。さらに、説明を分かりやすくするために、静磁場発生コイルが発生する磁場勾配XS[A/m2]は一定であると仮定し、ゼロ磁場領域移動コイルが発生する磁場も均一(一定)であると仮定する。
【0050】
前出の非特許文献1によれば、直径30[nm]の磁性ナノ粒子の飽和外部磁場はHK=0.5×10−3・μ0−1[A/m]となる(μ0は真空の透磁率を表し、その値は4π×10−7[H/m]である。)。このことから、空間分解能はR=2HK/XSと表される。ここで、空間分解能の1辺は1[mm]と仮定していたので、これを前式に代入して解くと、静磁場発生コイルが発生する磁場勾配としては、XS=1・μ0−1[A/m2]が必要であることが分かる。
【0051】
図10は、静磁場発生コイルが発生する磁場勾配XSを一定とした場合のゼロ磁場領域移動コイルが発生するオフセット磁場とゼロ磁場領域との関係を示す図である。同図に示すように、関心領域である1辺が256[mm]の領域をカバーするためには、ゼロ磁場の範囲(同図では、静磁場発生コイルが発生する磁場勾配XSにゼロ磁場領域移動コイルによるオフセット磁場を重畳した磁場を表す直線MがX軸と交差する点を中心とした範囲)が±0.128・μ0−1[A/m]でなければならないことが分かる。すなわち、静磁場発生コイルが発生する磁場勾配XSを一定とした場合、ゼロ磁場領域移動コイルは±0.128・μ0−1[A/m]だけのオフセット磁場を磁場勾配XSに対して重畳する必要がある。
【0052】
ところで、国際安全規格IEC60601−2−33で規定されている磁束密度の時間変動率(dB/dt)の制限から、被検体に印加される磁場の磁場密度は、磁場の印加時間が連続の場合には20[T/s]以下でなければならないとされている。すなわち、磁場の印加時間は0.128×2/20=0.0128[s]となる。そのため、たとえばX軸(またはY軸)方向に1ライン分だけゼロ磁場領域を走査する場合には、0.0128[s]以上の時間をかけなければならないことになる。
【0053】
図11は、関心領域でのゼロ磁場領域の走査を示す図である。実際には、同図に示すように、MPI装置は、ゼロ磁場領域移動コイルを制御することによって、X軸方向(またはY軸方向)へゼロ磁場領域の走査を繰り返しながら(総回数=256)、これと直交するY軸方向(またはX軸方向)にも走査する。
【0054】
そのため、1面を走査し終わるために必要な時間は0.0128×256=3.2768[s]となる。さらに、1面毎の走査を256回繰り返しながらZ軸方向へ走査することによって全関心領域を走査することになるので、総走査時間は3.2768×256=838.8608[s]≒14[min]となる。
【0055】
臨床への応用を考えた場合でも、この程度の時間であれば十分に実用的であると言える。約14分間でZ軸方向の走査をすればよいことから、実施例3で説明した寝台移動によるZ軸方向の走査は被検体に負担をかけることなく実現可能であることが分かる。
【0056】
また、イメージングのために1点の測定に使える時間は0.0128×2/256=1×10−4[s]=100[μs]と計算される。さらに、人体に高周波磁界を印加する場合は人体の導電率と渦電流の影響を考えて、100[kHz]前後(周期10[μs])に設定されることが多い。これらの理由から、ゼロ磁場の移動による「ボケ」の影響を無視できるならば、1点につき最大10周期分のデータを収集できることになり、十分な精度で磁性ナノ粒子の分布を測定できることが分かる。
【0057】
次に、実施例1で示した図4を例に挙げて、現実的な範囲内で電気的にゼロ磁場を移動できるかを吟味してみる。図2および3のコイルについては、開口面積をほぼ同程度となるように設計しておけば、印加電流に対する発生磁場や自己インダクタンスもほぼ同程度となることから、図4のコイルに対して検討すれば十分である。
【0058】
ここで、図4に示したコイルは、単純な「円形コイル」とみなすことができる。図12は、円形コイルにより発生する磁場を示す図である。同図に示すように、コイルに流れる電流をI[A]、コイルの半径をa[m]とすると、コイルの中心軸上で中心からz[m]離れた位置での磁場H[A/m]は以下の式で表される。
【数1】
【0059】
この式から、a=0.5[m]、z=0[m]としてH=0.128・μ0−1[A/m]を満足するためには、電流としてI=2a×0.128・μ0−1=1.02×105[A]を流す必要があることが分かる。
【0060】
また、コイルの巻き数N、長さl[m]、半径a[m]、真空の透磁率μ0[H/m]とすると、自己インダクタンスLは以下の式で表される。
【数2】
【0061】
さらに、長さlが半径と比べて十分短いと仮定できる場合(l<<aに相当。)には、自己インダクタンスLは以下の式で近似することができる。
L=(μ0・N2・π・a)/2[H]
【0062】
これらの式から、たとえばコイルの巻数をN=200[turn]とすれば、I=510[A]、自己インダクタンスL=0.0789[H]となり、コイルの抵抗損が無視できる場合、印加すべき電圧E[V]はE=L・(dI/dt)=0.0789×510/0.0128=3,145[V]と求めることができる。
【0063】
これは、周波数39.1[Hz](周期T=0.0128×2=0.0256[s]に対応。)にて最大電圧3,145[V]、最大電流510[A]を印加することができれば、このコイルを十分駆動することが可能であることを示している。そして、これらコイルの性能は、現在製品に搭載されているMRI装置用傾斜磁場電源の性能と比較すれば、十分に実現可能であることが分かる。
【0064】
ところで、すでに説明したように、実用可能なMPI装置を得るためには、510[A]、39.1[HZ]の交流電流を約14分間連続で流し続ける必要性があることから、ゼロ磁場領域移動コイルの抵抗値をゼロに近くすることができれば抵抗損による発熱がほとんど無視することができ、実用上非常に有利になる。
【0065】
2006年11月1日付けの国際超電導産業技術センター(ISTEC)の発表によれば、イットリウム系高温超電導ケーブル(導体径20mm)600[Arms](商用周波数)を用いた場合に、交流損失を0.004[W/m]以下に抑えることができると報告されている(「超電導コイル エネルギー損失1/3 ISTEC変圧器など応用期待」,日経産業新聞,2006年11月1日、「ソリューション21」,日工フォーラム,2006年9月号,34ページ)。
【0066】
これは、コイルの半径a=0.5[m]、巻き数N=200[turn]とすれば、トータルの交流損失が2.51[W]以下になることを意味しており、十分実用的なレベルに達していることを示唆している。
【0067】
また、前述したように、ゼロ磁場領域の大きさ(画像分解能に関連)を維持しながら3次元走査範囲を拡大するには、ゼロ磁場領域移動コイルにより発生する磁場が十分強力でなければならない。そのためには、ゼロ磁場領域移動コイルに大電流を流す必要があるが、各ゼロ磁場領域移動コイルに通常の銅線を使ったのでは、抵抗損によるエネルギー損が非常に大きくなるため、強力な冷却装置が必要になるなどの問題がある。
【0068】
イットリウム系超電導ケーブルは、交流電流を流してもエネルギー損失がそれ程大きくならず、かつ、液体窒素温度で高温超電導状態となるので、このイットリウム系超電導ケーブルをゼロ磁場領域移動コイルとしてこれによって所望の画像分解能と撮影視野を確保したままで、ランニングコスト(=電力損失と冷却損失)を下げることができる。
【0069】
以上の理由から、本発明のゼロ磁場領域移動コイルは、交流電流を流してもエネルギー損失がそれほど大きくならず、かつ、液体窒素で超電導状態を示すイットリウム系超電導ケーブルで構成しておくことが望ましい。これにより、所望の画像分解能と撮影視野を確保したままで、ランニングコスト(=電力損失と冷却損失)を下げることができる。
【0070】
さらに、ゼロ磁場領域移動コイルだけでなく静磁場発生コイルもこれで実現する方が冷却コストの面からも有利であり、かつ、電流値や電流方向を簡単に変更できるという利点も生じる。
【産業上の利用可能性】
【0071】
以上のように、本発明に係る磁性微粒子イメージング装置およびコイル配設方法は、装置を小型化することが求められる場合に有用であり、特に、撮影領域が円筒形状に形成されている場合に適している。
【図面の簡単な説明】
【0072】
【図1】本実施例1に係るMPI装置の構成を示す構成図である。
【図2】本実施例1に係るX軸方向用のゼロ磁場領域移動コイルを示す図である。
【図3】本実施例1に係るY軸方向用のゼロ磁場領域移動コイルを示す図である。
【図4】本実施例1に係るZ軸方向用のゼロ磁場領域移動コイルを示す図である。
【図5】本実施例2に係るX軸方向用のゼロ磁場領域移動コイルを示す図である。
【図6】本実施例2に係るY軸方向用のゼロ磁場領域移動コイルを示す図である。
【図7】本実施例2に係るZ軸方向用のゼロ磁場領域移動コイルを示す図である。
【図8】本実施例3に係るMPI装置の構成を示す構成図である。
【図9】ゼロ磁場領域移動コイルにより発生する磁場とゼロ磁場領域のシフト量との関係を示す図である。
【図10】静磁場発生コイルが発生する磁場勾配を一定とした場合のゼロ磁場領域移動コイルが発生するオフセット磁場とゼロ磁場領域との関係を示す図である。
【図11】関心領域でのゼロ磁場領域の走査を示す図である。
【図12】円形コイルにより発生する磁場を示す図である。
【図13】従来のMPI装置を説明するための図(1)である。
【図14】従来のMPI装置を説明するための図(2)である。
【図15】従来のMPI装置における問題点を説明するための図である。
【符号の説明】
【0073】
10,30 MPI装置
11 ゼロ磁場領域
12 静磁場発生コイル
13x,13y,13z,23x,23y,23z ゼロ磁場領域移動コイル
34z 天板
【特許請求の範囲】
【請求項1】
ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置であって、
前記ゼロ磁場領域を発生させる静磁場発生コイルと、
円筒形状に形成された撮影領域を巻装するようにそれぞれ配設され、前記撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルと、
を備えたことを特徴とする磁性微粒子イメージング装置。
【請求項2】
前記ゼロ磁場領域移動コイルは、三つのループコイルから構成され、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域の中心に幾何学的中心が一致するようにそれぞれ配設されていることを特徴とする請求項1に記載の磁性微粒子イメージング装置。
【請求項3】
前記ゼロ磁場領域移動コイルは、前記被検体の体軸方向に前記ゼロ磁場領域を移動する一つのヘルムホルツコイルと、それぞれ前記撮影領域の側面に沿って湾曲するように形成され、他の2次元の方向に前記ゼロ磁場領域を移動する二つのサドルコイルとから構成されることを特徴とする請求項1に記載の磁性微粒子イメージング装置。
【請求項4】
前記ゼロ磁場領域移動コイルのうち前記被検体の体軸方向に前記ゼロ磁場領域を移動するゼロ磁場領域移動コイルに代えて、前記被検体を体軸方向に移動することによって相対的に前記ゼロ磁場領域を移動する天板を備えたことを特徴とする請求項1、2または3に記載の磁性微粒子イメージング装置。
【請求項5】
前記ゼロ磁場領域移動コイルは、それぞれ、イットリウム系超電導ケーブルにより形成されていることを特徴とする請求項1〜4のいずれか一つに記載の磁性微粒子イメージング装置。
【請求項6】
前記静磁場発生コイルは、イットリウム系超電導ケーブルにより形成されていることを特徴とする請求項5に記載の磁性微粒子イメージング装置。
【請求項7】
前記静磁場発生コイルは、前記撮影領域を巻装するように配設されていることを特徴とする請求項1〜6のいずれか一つに記載の磁性微粒子イメージング装置。
【請求項8】
ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置で用いられるコイル配設方法であって、
円筒形状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルを、前記撮影領域を巻装するようにそれぞれ配設するステップを含んだことを特徴とするコイル配設方法。
【請求項1】
ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置であって、
前記ゼロ磁場領域を発生させる静磁場発生コイルと、
円筒形状に形成された撮影領域を巻装するようにそれぞれ配設され、前記撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルと、
を備えたことを特徴とする磁性微粒子イメージング装置。
【請求項2】
前記ゼロ磁場領域移動コイルは、三つのループコイルから構成され、すべてのゼロ磁場領域移動コイルに電流が流れていない状態でゼロ磁場領域の中心に幾何学的中心が一致するようにそれぞれ配設されていることを特徴とする請求項1に記載の磁性微粒子イメージング装置。
【請求項3】
前記ゼロ磁場領域移動コイルは、前記被検体の体軸方向に前記ゼロ磁場領域を移動する一つのヘルムホルツコイルと、それぞれ前記撮影領域の側面に沿って湾曲するように形成され、他の2次元の方向に前記ゼロ磁場領域を移動する二つのサドルコイルとから構成されることを特徴とする請求項1に記載の磁性微粒子イメージング装置。
【請求項4】
前記ゼロ磁場領域移動コイルのうち前記被検体の体軸方向に前記ゼロ磁場領域を移動するゼロ磁場領域移動コイルに代えて、前記被検体を体軸方向に移動することによって相対的に前記ゼロ磁場領域を移動する天板を備えたことを特徴とする請求項1、2または3に記載の磁性微粒子イメージング装置。
【請求項5】
前記ゼロ磁場領域移動コイルは、それぞれ、イットリウム系超電導ケーブルにより形成されていることを特徴とする請求項1〜4のいずれか一つに記載の磁性微粒子イメージング装置。
【請求項6】
前記静磁場発生コイルは、イットリウム系超電導ケーブルにより形成されていることを特徴とする請求項5に記載の磁性微粒子イメージング装置。
【請求項7】
前記静磁場発生コイルは、前記撮影領域を巻装するように配設されていることを特徴とする請求項1〜6のいずれか一つに記載の磁性微粒子イメージング装置。
【請求項8】
ゼロ磁場領域に対して交番磁場を印加することにより当該ゼロ磁場領域内の磁性微粒子から発せられる高調波信号に基づいて被検体内における磁性微粒子の分布を画像化する磁性微粒子イメージング装置で用いられるコイル配設方法であって、
円筒形状に形成された撮影領域内でゼロ磁場領域を三次元方向に移動するゼロ磁場領域移動コイルを、前記撮影領域を巻装するようにそれぞれ配設するステップを含んだことを特徴とするコイル配設方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−56232(P2009−56232A)
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願番号】特願2007−228061(P2007−228061)
【出願日】平成19年9月3日(2007.9.3)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願日】平成19年9月3日(2007.9.3)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]